TCC1
PROF. DRA.LOANA
ALUNO: LUIS CLAUDIO FERREIRA DOS SANTOS
RELATÓRIO PARCIAL
2.COMPENSAÇÃO DE REATIVOS EM SISTEMAS ELÉTRICOS DE POTÊNCIA
2.1ASPECTOS GERAIS
Os primeiros sistemas elétricos de potência (SEP’s) que surgiram no mundo
apresentavam uma característica muito particular e que, nos dias de hoje, é cada vez mais difícil
de ser encontrada – a geração localizava-se junto à sua própria carga. E, mesmo nesta situação,
já se pôde verificar que a manutenção de uma razoável constância na tensão dos pontos de
entrega aos consumidores era de suma importância. Desde então, iniciou-se a busca de métodos
eficazes para o real controle da tensão nos SEP’s. Deve-se ressaltar que, devido ao pequeno
porte destes primeiros sistemas, o mecanismo básico de controle consistia apenas na regulação
do nível de tensão nos terminais das máquinas geradoras, bem como na regulação de sua
capacidade de fornecer a necessária energia aos consumidores.
É importante notar que, desde tais tempos, muitas modificações surgiram. Com o
aparecimento de grandes consumidores industriais, que já utilizavam sofisticados processos
produtivos, a manutenção da tensão de suprimento, e também da freqüência, dentro de
estreitos limites de variação tornou-se importante meta a ser perseguida pelos operadores dos
SEP’s. Além disto, com o crescimento dos grandes centros consumidores e escasseamento das
fontes de energia locais, houve necessidade de distanciar a geração das cargas. E foi então que
novas soluções para o controle de tensão tiveram que surgir, pois a simples regulação dos
geradores já não se fazia tão eficiente.
Num crescer quase que geométrico, as necessidades de energia elétrica das
sociedades vieram se avolumando. Obrigando os planejadores procurarem fontes cada vez mais
distantes e, o que é mais importante, a interligar várias fontes para atender a seus
consumidores. Com isto, novos e mais complexos problemas surgiram, forçando a estudos e
soluções mais e mais elaborados. Esta mesma sociedade crescente passou a exigir ainda melhor
qualidade e constância em seu suprimento, o que só veio a aumentar a carga de
responsabilidade dos fornecedores.
Para fazer frente a estas exigências, começaram a surgir órgãos de normalização e
fiscalização das companhias fornecedoras de energia elétrica, como é o caso do Departamento
Nacional de Águas e Energia Elétrica (DNAEE), hoje Agência Nacional de Energia Elétrica (ANEEL)
no Brasil. Estes órgãos fixam metas a serem perseguidas quando do Planejamento e Operação
dos SEP’s, visando garantir a necessária qualidade no suprimento aos consumidores, bem como
uma aplicação econômica e rentável dos recursos da área energética.
Com relação aos níveis de tensão de suprimento, uma série de normas são
especificadas. Em primeiro lugar, apenas uma pequena variação na tensão média da barra do
consumidor é permitida com relação ao valor nominal préestabelecido. No caso do Brasil, este
desvio é de +5% e –7% em média tensão. (1)
Por outro lado, caso existam flutuações menores, mas que se repitam com freqüência,
elas deverão ser evitadas mesmo não ultrapassando os 3% acima citados. Por exemplo,
variações de tensão da ordem de 0,20 a 0,30%, mas que se verifiquem 5 ou 6 vezes por segundo,
provocam na iluminação desagradáveis variações comumente conhecidas como flickers, e que
proporcionam uma má qualidade de fornecimento. Por isto mesmo, elas deverão ser reduzidas,
de alguma forma, pelo supridor, para que não cheguem aos consumidores.
Entretanto, o controle de tensão não tem sua importância restrita ao fornecimento de
energia com qualidade, muito pelo contrário, é através de um adequado controle dos níveis de
tensão de um sistema de transmissão que se consegue mantê-lo em funcionamento sob certas
condições de contingências de linhas e equipamentos. Além disto, para se conseguir um máximo
aproveitamento das grandes linhas de transmissão, a fim de que elas possam transportar o
máximo de potência ativa possível, controles de tensão estrategicamente colocados tornam-se
sumamente necessários.
Por último, destaca-se ainda mais a premência de controles de tensão, lembrando que
as cargas dos SEP’s são extremamente diversificadas e dinâmicas. Isto significa que, a cada
instante, a demanda requerida pelos consumidores, tanto no que se refere à potência ativa
quanto à reativa, varia, forçando a uma constante readaptação por parte dos fornecedores. E
parte desta readaptação consiste justamente em exercer um adequado controle na tensão de
suprimento, pois caso contrário os limites anteriormente citados seriam freqüentemente
violados.
Em linhas gerais, as técnicas de compensação dos sistemas elétricos de potência são
explanadas neste capítulo, onde também são apresentados alguns dos equipamentos, de
acordo com suas evoluções que compõem o conjunto necessário à implementação das
mesmas.(1)
2.2 COMPENSAÇÃO DE REATIVOS OBJETIVOS
A compensação de cargas elétricas se faz com base em três principais objetivos [38]:
(a) Balanceamento de cargas desequilibradas;
(b) Correção do fator de potência;
(c) Melhoramento da regulação de tensão.
A correção do fator de potência usualmente significa, na prática, a possível geração de
potência reativa para a carga de acordo com a solicitação da mesma, suprida por uma fonte de
alimentação distante. Cargas industriais apresentando fator de potência atrasado, ou seja,
absorvendo potência reativa, fazem com que as correntes de carga sejam bem maiores do que
as requeridas pela fonte, caso somente potência ativa fosse exigida. Tarifas de alimentação para
consumidores industriais quase sempre penalizam cargas com baixo fator de potência por muito
tempo, e o resultado tem sido um extenso esforço para correção do fator de potência em
instalações industriais.
A regulação de tensão torna-se importante e às vezes um procedimento
imprescindível na presença de cargas que variam muito suas demandas de potência reativa.
Todas as cargas se apresentam com variação na demanda da potência reativa, entretanto elas
diferem bastante no valor e na taxa de variação. Em todos os casos, a variação dessa potência
causa variação na tensão no ponto de alimentação, que poderá interferir na operação eficiente
das instalações conectadas nesse ponto. Para proteção contra este fato, as concessionárias
estabelecem normas para manter a tensão de alimentação dentro de limites definidos. Estes
limites podem variar tipicamente dentro do valor médio de +5% e –7% em média tensão em
curtos períodos de poucos minutos ou horas, sendo que, para muitos casos, são colocadas as
mais severas imposições, onde grandes cargas que variam rapidamente provocam variações
incertas de tensões para a operação de equipamentos de proteção, ou o efeito visual
denominado na literatura técnica de flicker. Portanto, dispositivos de compensação deverão
apresentar um vital papel de manter as tensões de alimentação dentro de limites pretendidos.
Uma solução naturalmente encontrada para melhorar a regulação da tensão seria
reforçar o sistema aumentando o porte e o número de unidades geradoras e fazendo a
interligação dos sistemas. Esta solução, no entanto é antieconômica, introduzindo problemas
associados aos altos níveis de curto-circuito, e assim, aumentando as capacidades dos
disjuntores utilizados.
Outro objetivo da compensação da carga é o balanceamento. Os sistemas de potência
são dimensionados para operações balanceadas, uma vez que a operação desbalanceada
provoca o aumento de corrente representando para certas fases uma sobrecarga e a origem das
componentes de sequência negativa e zero. Tais componentes podem ter efeitos indesejáveis,
tais como, perdas adicionais em motores e unidades geradoras, conjugados oscilantes em
motores de corrente alternada, aumento da ondulação em retificadores, mau funcionamento
de vários tipos de equipamentos, saturação em transformadores, e correntes excessivas para o
neutro. Neste sentido, a operação de um dado compensador, dentro dos princípios a serem
postulados, deve eliminar ou reduzir o grau de desequilíbrio introduzido pelas cargas.
2.3 CARGAS QUE REQUEREM COMPENSAÇÃO
Cargas que causam flutuações na tensão de alimentação podem ser compensadas não
somente para o fator de potência, mas também para a regulação de tensão. O grau da variação
da tensão é avaliado no “ponto de acoplamento comum” (P.A.C.), que é usualmente o ponto na
rede onde a área de responsabilidade entre o consumidor e a concessionária termina. Este
ponto seria, por exemplo, o lado de alta tensão do transformador de distribuição alimentando
uma instalação particular.
As cargas típicas que requerem compensação são: fornos à arco, fornos de indução,
soldas a arco, minas de carvão, grandes motores (particularmente aqueles que partem e param
freqüentemente), escavadeiras, serrarias, experiências físicas de alta energia (por exemplo, o
Ciclotron), etc. Estas cargas podem ser classificadas como aquelas que apresentam operações
inerentemente não lineares, e que causam distúrbios ao serem ligadas e desligadas
freqüentemente. Cargas não lineares normalmente geram harmônicos, assim como variações
da tensão.
Em muitos casos, oscilações de tensão causadas por partidas de motores são evitadas
através de transformador ajustável ou outros equipamentos, ou por dispositivos eletrônicos de
partida gradual.
2.4 PADRÕES ACEITÁVEIS PARA QUALIDADE DE FORNECIMENTO
Um dos principais efeitos desagradáveis das variações de tensão de alimentação nos
sistemas de distribuição é o distúrbio no nível de alimentação produzido no filamento de
tungstênio das lâmpadas incandescente. O grau para o qual estas variações são desagradáveis,
depende não somente da intensidade da variação da luz, mas também de suas frequências ou
valor de variação, devido às características da sensibilidade do olho humano. Baixas variações
de tensão em torno de 3% são toleráveis, enquanto que variações rápidas causadas por fornos
a arco ou solda elétrica podem coincidir com a máxima sensibilidade visual (entre 1 e 25 Hz) que
deve ser limitada à intensidade de 0,25% ou menos. Vários outros tipos de cargas são sensíveis
às variações da tensão de alimentação, especialmente computadores, certos tipos de relés
empregados no controle e proteção, motores de indução e lâmpadas de descarga ou
fluorescentes.
A tabela 2.1 [31] é representativa dos padrões que poderão ser prescritos para o
comportamento do sistema com um tipo de carga que provoca distúrbios. No caso de
instalações com soldas elétricas, a variação de tensão permitida é inversamente relacionada
com a sensibilidade do olho humano para leves flutuações como uma função da frequência
2.5. AS CARACTERÍSTICAS DE OPERAÇÃO DOS SISTEMAS ELÉTRICOS DE POTÊNCIA
A maioria dos sistemas elétricos de potência atuais são controlados mecanicamente
[26], ou seja, operam com compensações de reativos fixas ou chaveadas mecanicamente,
juntamente com transformadores defasadores e reguladores de tensão, a fim de otimizar a
impedância da linha, minimizar as variações de tensão em regime permanente ou em condições
de lentas variações de carga. A fim de melhor visualizar a necessidade da compensação, veja a
linha de transmissão teórica da figura 2.1.
O fluxo de potência através dessa linha, desprezando-se a resistência, é dado em
função do ângulo de carga, da magnitude das tensões nos terminais e da impedância da linha,
como mostra a equação (2.1).
onde:
P – Potência que flui da barra “s” para a barra “r”;
Vs – Magnitude da tensão na barra “s”;
Vr – Magnitude da tensão na barra “r”;
δ sr – Ângulo de carga ( θ s – θ r);
θ s – Ângulo de fase da tensão Vs;
θ r – Ângulo de fase da tensão Vr
XL – Impedância da linha.
Verifica-se então que, não havendo controle algum sobre tais parâmetros, o
comportamento da potência elétrica que flui da barra “s” para a barra “r” em função do ângulo
de carga δ sr obedece a curva apresentada na figura 2.2.
Da figura 2.2 observa-se que a máxima potência está associada ao ângulo de carga de
90º, e uma elevação desse ângulo, causada pelo aumento do carregamento da linha, implica na
instabilidade do sistema de transmissão.
Portanto, constata-se a necessidade de uma alteração nos parâmetros, e
conseqüentemente na operação, dos circuitos de transmissão, a fim de se obter um melhor
aproveitamento dos mesmos. Devido a isso, a tecnologia de compensação torna-se necessária,
uma vez que o seu emprego proporciona alguns benefícios como:
• maior controle do fluxo de potência;
• menor impacto ambiental, comparado com outras técnicas alternativas de expansão do
sistema de transmissão;
• carregamento das linhas de transmissão, que podem atingir níveis próximos de seus limites
térmicos de operação;
• maior habilidade em transferir potência entre redes interligadas, podendo então diminuir
a margem de reserva de geração, que é tipicamente em torno de 18%, passando a 15% ou
menos;
• amortecimento das oscilações dos sistemas de potência, que podem causar danos a
equipamentos e/ou limitar a capacidade de transmissão do sistema.
Para atingir tais metas, os equipamentos compensadores empregam técnicas de
compensação paralela e/ou série para o controle do fluxo de potência, cujos princípios básicos
de funcionamento são explanados a seguir.
2.6 PRINCÍPIOS DE OPERAÇÃO DOS COMPENSADORES NO CONTROLE DO FLUXO DE POTÊNCIA
Como visto anteriormente, o fluxo de potência estabelecido em uma linha de
transmissão (equação (2.1)) é função dos seguintes parâmetros:
• impedância equivalente;
• magnitude das tensões nos terminais da linha de transmissão;
• ângulo de fase entre as tensões nos terminais da LT.
Assim, para se controlar o fluxo de potência, são empregados os dispositivos baseados
na tecnologia dos compensadores estáticos, que atuam no sentido de alterar os parâmetros
supracitados, de acordo com uma necessidade predeterminada. A operação de tais dispositivos
é baseada nos princípios de compensação paralela e série e de controle do ângulo de fase [26],
as quais são apresentadas, de forma ideal, a seguir.
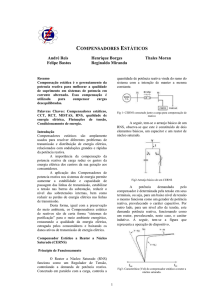
(a) O Compensador Paralelo Ideal
Com finalidade de explanar o princípio básico de operação de um compensador
paralelo, é utilizado um sistema CA simplificado, composto por duas máquinas ideais
interligadas por uma linha de transmissão cujas perdas são desprezadas, como mostra a figura
2.3.
Para a presente análise, é assumido que as tensões Vs e Vr possuem a mesma
magnitude (V) e estão defasadas por um ângulo δ sr.
Na figura 2.3, observa-se que no meio da linha encontra-se conectada uma fonte de
tensão paralela controlada, cujo objetivo é ajustar o fluxo de potência em um valor préestabelecido. Nessas condições, o diagrama fasorial referente ao sistema em estudo é
apresentado na figura 2.4, considerando ainda que, a tensão Vm tem a mesma magnitude que
Vs e Vr .
Baseando-se na figura 2.4, é possível concluir que, quando a diferença angular entre
as tensões Vs e Vmé δsr/2, o fasor da corrente de linha está em quadratura com a queda de
tensão na reatância de cada semi-trecho de linha. Em conseqüência disso, não existe fluxo de
potência ativa através da fonte de tensão controlada. Neste caso, a potência transmitida da
barra “s” para a barra “r” é determinada pela equação (2.2),
Onde:
V-Magnitude das tensões Vs, Vr e Vm.
Para efeito de comparação, as características P versus δ sr do sistema de duas barras
sem compensação, ditada pela equação (2.1), e com compensação, descrita pela equação (2.2),
são traçadas na figura 2.5.
Observando-se o gráfico, é possível verificar que, com a presença da fonte de tensão
ideal controlada como meio de compensação paralela, há um incremento tanto na margem de
estabilidade do sistema, bem como na máxima potência transmitida pela linha de transmissão.
(b) Compensador série ideal
Da mesma forma que na seção anterior, neste caso é utilizado um sistema CA
simplificado, para a análise do princípio básico de operação de um compensador série, o qual é
mostrado na figura 2.6.
O sistema da figura 2.6 é composto por duas máquinas interligadas por uma linha de
transmissão, onde está conectado um compensador série ideal representado pela fonte de
tensão Vc . Este último tem por meta controlar o fluxo de potência na linha, através da variação
da reatância equivalente da mesma. Nesta análise, as mesmas condições de contorno foram
adotadas, ou seja, as perdas são desprezadas, as tensões Vs e Vr possuem a mesma magnitude
(V) e estão defasadas por um ângulo de carga δ sr. Com isso, o diagrama fasorial referente ao
sistema da figura 2.6 é apresentado na figura 2.7.
Para a situação ilustrada no diagrama anterior, assume-se que a fonte de tensão Vc
esteja realizando compensação capacitiva e, com isso, a corrente de linha encontra-se adiantada
em 90º da mesma. Isso caracteriza, também, a ausência de potência ativa, fornecida ou
absorvida pela referida fonte. Ainda, com relação a figura 2.6, a potência através da linha de
transmissão é dada pela equação (2.3).
onde: s – Taxa de compensação imposta ao sistema através dos compensadores série
definida por:
A equação (2.3) permite concluir que a máxima potência transferida pode ser elevada
consideravelmente, com a compensação série, o que é visto, também, através da figura 2.8.
Da figura 2.8, observa-se que, o ângulo para o qual ocorre a máxima potência
transmissível é de 90º, independente do valor adotado para “s” e, conseqüentemente, do valor
máximo de P. Deve-se ressaltar que, quando o valor de “s” é zero, a curva característica
corresponde, exatamente, àquela do sistema sem compensação.
(c) O controlador do Ângulo de Fase Ideal
O controlador do ângulo da fase pode ser considerado como uma variante do
compensador série. Isso porque, através do mesmo tipo de conexão com o sistema (série),
proporciona a alteração da defasagem angular das tensões nos terminais das linhas. Assim, com
vistas a discutir a atuação destes controladores, é considerado o sistema apresentado na figura
2.9, o qual é composto por duas máquinas interligadas por uma linha de transmissão.
Além disso, encontra-se conectada junto à barra “s”, uma fonte de tensão controlada
que tem por objetivo alterar o ângulo de fase no referido terminal, acarretando, portanto, em
uma variação na diferença angular entre as barras “s” e “r” e, consequentemente, no controle
do fluxo de potência correspondente. Novamente, desprezando-se as perdas no sistema da
figura 2.9 e considerando que as tensões Vs , Vs1 e Vr possuem a mesma magnitude (V), o
respectivo diagrama fasorial é apresentado na figura 2.10.
A figura 2.10 mostra o fasor Vpq, produzido pelo controlador, que pode ter uma
magnitude e ângulo de fase variados em relação à corrente de linha I, possibilitando, assim, a
absorção ou o fornecimento de potência tanto ativa quanto reativa. Além disso, na mesma
figura pode-se verificar que, o ângulo de carga entre os terminais da linha de transmissão é dado
por ( δ sr − α ), em que o controle do fluxo de potência é efetuado através da variação do ângulo
α . Isso é constatado, também, através da seguinte expressão:
onde: α – Ângulo de controle.
Baseando-se na equação (2.5), pode-se traçar a característica P versus δ sr, do sistema
compensado pelo controlador de ângulo de fase, mostrada na figura 2.11.
Com base na equação (2.5) e na figura 2.11 pode-se dizer que, mantendo-se a
diferença ( δ sr − α ) próxima de 90º é possível transportar a máxima potência através da linha,
para valores de δ sr acima de 90º sem comprometer a estabilidade do sistema. Tal constância
na diferença ( δ sr − α ) é obtida variando-se o ângulo α à medida que ocorre uma alteração do
δ sr. Obviamente que, o limite dessa variação do ângulo α é que determina a potência do
equipamento [27]. Ainda, da figura 2.11 ressalta-se que, quando o valor de “ α ” é zero, a curva
característica corresponde, exatamente, àquela do sistema sem compensação.
(d) Comparação entre os controladores Ideais de Fluxo de Potência
A figura 2.12 mostra uma comparação entre as características P versus δ sr, geradas
através das compensações efetuadas com os três tipos de controladores ideais apresentados
nas subseções anteriores, juntamente com aquela obtida sem compensação alguma.
Da figura anterior pode-se constatar que a melhor estratégia de compensação
depende do propósito do controle do fluxo de potência em um determinado sistema, ou seja:
• para que a capacidade de transmissão de uma linha seja elevada, a compensação série,
através do controle da impedância equivalente do ramo, é a melhor escolha;
• já, a opção mais indicada para aumentar a margem de estabilidade do sistema é a
compensação paralela;
• por outro lado, no caso de interligação de sistemas onde ocorrem excessivas variações dos
ângulos de fase, a adoção de um controle de fluxo de potência através de defasadores se
mostra a melhor alternativa.
2.5 EQUIPAMENTOS UTILIZADOS NA COMPENSAÇÃO DOS SISTEMAS ELÉTRICOS DE POTÊNCIA
Como já dito anteriormente, os equipamentos utilizados na compensação são
destinados a controlar o fluxo de potência de um sistema através dos seguintes parâmetros:
tensão, ângulo de fase e impedância. Diante disso, tais dispositivos são agrupados em três
categorias, de acordo com as suas finalidades e conexão ao sistema, sejam elas:
• equipamentos para compensação paralela;
• equipamentos para compensação série;
• equipamentos defasadores.
Além disso, o universo dos compensadores engloba equipamentos que empregam
elementos semicondutores tais como tiristores, GTOs, IGBTs, MOSFETs, entre outros. Dessa
forma, um outro critério adotado para classificação de tais dispositivos, é quanto ao tipo de
chave utilizada e, consequentemente, quanto à filosofia de operação dos mesmos. Nesse
contexto, tal classificação é dada por:
• compensadores Síncronos;
• compensadores Estáticos baseados em tiristores convencionais;
• compensadores Estáticos a Reator à Núcleo Saturado;
• compensadores Estáticos avançados.
Face a isto, as seguir são apresentados alguns dos principais dispositivos
compensadores, de acordo com as categorias em que estes se enquadram.
2.5.1 Compensadores baseados em tiristores convencionais
Atualmente, a maioria dos compensadores estáticos utilizados, ou propostos,
empregam tiristores convencionais (os quais não possuem capacidade intrínseca de bloqueio)
nos arranjos de compensação envolvendo capacitores, indutores e defasadores. Isso porque,
quando comparados com os meiosmecânicos para o chaveamento, os tiristores apresentam
uma resposta bem mais rápida e, ainda, são operados através de sofisticados controles, que se
traduz em maior precisão. Todos os equipamentos, com exceção dos defasadores, que adotam
esta filosofia possuem a característica comum de que a potência reativa necessária à
compensação é gerada ou absorvida por bancos de capacitores e/ou reatores tradicionais. Nesse
caso, os tiristores são utilizados, apenas, para o controle da impedância representativa de tais
equipamentos no contexto do sistema, quando submetidos a um determinado valor de tensão.
A seguir são comentados, alguns dos equipamentos enquadrados nesta categoria, de acordo
com o tipo de compensação.
2.5.1.1 EQUIPAMENTOS PARA COMPENSAÇÃO PARALELA
(a) Compensador Síncrono
Os compensadores síncronos [1] são motores síncronos de construção especial. Seu
funcionamento baseia-se na capacidade natural que os motores síncronos têm de fornecer ou
absorver energia reativa do sistema ao qual estão ligados, dependendo do seu grau de excitação.
A característica da potência como função da corrente de excitação de uma máquina síncrona é
mostrada na figura 2.13. Nesta figura, o segmento 0A é o valor da corrente de excitação para o
funcionamento da máquina à vazio, quando a mesma absorve exclusivamente potência ativa
para cobrir suas perdas internas. Aumentando-se a excitação, a máquina passa a fornecer
energia reativa que vem a possuir em excesso. Nestas condições ela se comporta como se fosse
um capacitor, donde a denominação usual de condensador síncrono. Ao reduzirmos a excitação
a um valor menor do que 0A, a energia magnética torna-se insuficiente para o seu
funcionamento epassará a absorver da rede a diferença de energia necessária, comportando-se
como um indutor. Desta forma, ajustando-se a corrente de excitação da máquina através de um
sistema de controle podemos regular o fluxo de potência reativa de acordo com as necessidades
do sistema. A máquina síncrona possui outra importante propriedade que é a auto regulação.
Suponha-se que a máquina esteja operando com a excitação 0B e V2 e que a tensão seja
reduzida para 0,9V2. Imediatamente o compensador passa a fornecer uma potência reativa BC',
o que provoca uma redução na queda de tensão da linha e um aumento na tensão terminal da
máquina, reduzindo novamente a potência reativa, vindo a se estabelecer o equilíbrio entre BC
e BC'.
Também se a máquina estiver funcionando com a excitação OD, ela estará absorvendo
a potência reativa DE. Se a tensão diminuir para 0,9 V2 passa a absorver DE', haverá redução na
queda de tensão, o que virá aumentar novamente a tensão nos terminais da máquina,
encontrando-se um ponto de equilíbrio, com a potência reativa entre DE e DE'. O controle da
excitação é feito através de um sistema especial com alta velocidade de resposta. Para cargas
com variações de frequência superiores a 4 Hz e desequilibradas o uso do compensador síncrono
poderá acarretar sobre tensões nas fases menos carregadas, pois o mesmo só pode gerar
componentes de sequência positiva. As constantes de tempo do campo e da inércia mecânica
constituem sérias limitações na velocidade de resposta. Na ausência dos controles de excitação
os compensadores síncronos operam em uma característica com inclinação proporcional às suas
reatâncias transitórias (0,2 p.u. na base da máquina). A correção da inclinação é obtida através
do controle da excitação, que fica restrito ao atraso da constante de tempo do campo.
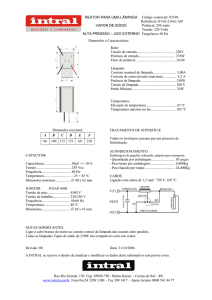
(b) Reator Controlado a Tiristor (RCT)
A figura 2.14 mostra um esquema básico de um RCT, o qual tem por objetivo controlar
o perfil de tensão na barra onde se encontra conectado, via maior ou menor absorção de
reativos.
Tal controle de reativos é feito através do ângulo de disparo (α) dos dois tiristores
conectados em anti-paralelo e em série com o reator, que determina a passagem de maior ou
menor quantidade de corrente pelo mesmo. Este procedimento acarreta em um elevado
conteúdo harmônico na corrente drenada pelo RCT, para um ângulo de disparo diferente de 90º
[28]. A fim de se minimizar o impacto de tal poluição, têm sido utilizados transformadores
estrela-delta para conexão dos RCTs ao sistema, bem como filtros passivos [26].
(c) Capacitor Chaveado a Tiristores (CCT)
Na figura 2.15 é ilustrado um arranjo da conexão de um CCT a um barramento CA o
qual, também, compreende 2 (dois) tiristores em anti-paralelo em série com um banco de
capacitores.
Na figura 2.15, os tiristores são ligados somente quando o sinal da tensão no
barramento CA passa por zero. Portanto, as únicas condições em que o banco de capacitores se
apresenta ao sistema são: ligado ou desligado, ou seja, condução plena ou corrente nula. Com
isso, a corrente circulante através do CCT se apresenta com características senoidais [27].
(d) Compensador Estático de Reativos (CE)
A utilização de um dos equipamentos abordados anteriormente, nos itens (A) e (B),
permite apenas a compensação capacitiva ou reativa. Contudo, na maioria das aplicações,
ambas as estratégias são requeridas, dependendo da situação do sistema em um determinado
instante. Devido a essa necessidade, surgiu o Compensador Estático de Reativos (CE), ou SVC
(Static Var Compensator), cujo circuito básico é mostrado na figura 2.16.
Da figura 2.16 tem-se que, o arranjo de um SVC consiste da conexão de um RCT em
paralelo com um banco de capacitores fixo, ou chaveado a tiristores, cuja potência é definida
em função do máximo de reativos a ser suprido.
(e) Compensador Estático tipo Reator à Núcleo Saturado (CERNS)
Este tipo de compensador estático, que será analisado em detalhes no decorrer desta
tese, se diferencia bastante dos tipos de compensadores baseados na tecnologia dos tiristores
e dos avançados, pois não emprega tiristores ou mesmo qualquer sistema de controle a fim de
exercer sua função básica [7], [29]. O reator saturado tem o seu núcleo de forma fechada como
o de um transformador, sem enrolamento de potência no secundário. Os reatores de núcleo
saturado são projetados para atingirem a saturação na tensão de operação, por isso suportam
correntes de magnetização bem elevadas. É claro que, como se trata de um reator, quando
opera isolado como um compensador estático, o reator de núcleo saturado só tem condições
de absorver potência reativa, não podendo por si mesmo suprir necessidades de reativo,
transitórios ou permanentes, que o sistema venha a apresentar. O reator de núcleo saturado
tem condições de exercer uma ação contínua de controle, variando sua absorção de reativos de
maneira uniforme, conforme as necessidades encontradas. Historicamente, o reator a núcleo
saturado é o mais antigo dos meios de compensação estático controlável utilizado, pois sua
tecnologia foi dominada muito antes do aparecimentos dos sistemas de controle a estado
sólido. No aspecto construtivo, o reator de núcleo saturado utiliza em seu núcleo, um material
que apresenta as seguintes características:
• alta permeabilidade magnética na região não saturada;
• efeito desprezível de histerese;
• baixa permeabilidade na região saturada.
Normalmente usa-se o aço-silício de grãos orientados laminado a frio para este fim. A
não linearidade da curva B x H do material constituinte do núcleo magnético do reator é que
rege a operação do mesmo. Antes de ser atingida a saturação, a indutância apresentada pelo
reator é alta e a corrente é baixa. Após a saturação, a indutância cai, permitindo o aumento da
corrente. Se o reator é submetido a uma alta tensão, e está operando na região saturada, a força
magnetomotriz aumenta levando o núcleo a ter um comportamento semelhante ao de núcleo
de ar. Por isto, uma pequena variação de tensão nesta região provoca uma grande variação de
corrente. Como já mencionado, o reator de núcleo saturado serve para compensar elevações de
tensão onde não se exige um controle bastante rígido (é um consumidor natural de energia
reativa). Entretanto, com a inclusão de um capacitor em paralelo implicando na reatância
capacitiva (XCP) como mostra afigura 2.17, o conjunto assim formado pode também compensar
quedas de tensão. Com a instalação de um capacitor série, também mostrado na figura 2.17, em
cada fase do reator, pode-se melhorar a inclinação de sua curva característica, devido às tensões
em oposição de fase que se verificam em ambos. Escolhem-se valores convenientes de forma a
ter-se uma inclinação que mantenha as oscilações de tensão dentro de limites bastante rígidos.
Na figura 2.17 tem-se:
V0(t) – Tensão do sistema CA no ponto de acoplamento do CERNS;
i(t) – Corrente no ramo entre o CERNS e o sistema CA;
v(t) – Tensão nos terminais trifásicos do CERNS;
vR(t) – Tensão nos terminais do reator;
iC(t) – Corrente no ramo do capacitor shunt;
vCS(t) – Tensão nos terminais do capacitor colocado em série com o reator à núcleo saturado;
XR – Reatância do reator à núcleo saturado;
iR(t) – Corrente no reator à núcleo saturado;
XCP – Reatância do capacitor em paralelo para aumentar a flexibilidade de operação do
compensador, proporcionando a característica de manutenção de tensão constante quando
houver queda de tensão;
XCS – Reatância do capacitor série para melhorar a inclinação da curva característica do reator.
É um compensador bastante simples, com tempo de resposta inferior aos
compensadores a tiristores. Contudo, deve-se ter cuidados na aplicação dos capacitores série,
que podem causar problemas de instabilidade harmônica (principalmente em sistemas fracos)
que originam oscilações sub-harmônicas nas correntes de excitação e também provocam atraso
no tempo de resposta do compensador. Às vezes, é necessária a inclusão de filtros para reduzir
as harmônicas do reator, provocadas por cargas desequilibradas.
2.5.2 EQUIPAMENTOS PARA COMPENSAÇÃO SÉRIE
(a) Capacitor Série Chaveado a Tiristores (TSSC)
O controle da reatância série de uma linha de transmissão pode ser obtido através da
utilização de um TSSC, que é constituído por conjunto de capacitores (conectados entre si em
série e/ou paralelo) chaveados por dois tiristores em anti-paralelo, como mostra a figura 2.18
[29].
Nos sistemas apresentados na figura 2.18, quando os tiristores estão bloqueados, o
TSSC é visto pelo sistema como um capacitor série convencional. Uma vez disparadas tais chaves
semi-condutoras, os capacitores correspondentes são curto-circuitados. Este método de
compensação possui a vantagem de ser muito simples. Entretanto, tal modo de operação, que
compreende apenas dois níveis de condução dos capacitores, não permite um controle contínuo
do fluxo de potência, mesmo quando são utilizadas várias unidades capacitivas, como mostrado
na figura 2.18.
(b) Capacitor Série Controlado a Tiristores(TCSC)
A figura 2.19 apresenta o esquema básico de um TCSC, que consiste de um capacitor
de valor fixo ligado a um Reator Controlado a Tiristor (RCT).
Este tipo de compensador, ao contrário do TSSC, permite um controle contínuo da
impedância equivalente formada entre o capacitor e o reator, através do ângulo de disparo dos
tiristores em anti-paralelo. Assim, quando as chaves estão bloqueadas (α = 180º), o TCSC se
comporta como um capacitor série convencional. Por outro lado, com os tiristores conduzindo
completamente (α = 90º), o TCSC se comporta como uma indutância de pequeno valor.
2.5.3 EQUIPAMENTOS DEFASADORES
Estes equipamentos atuam no sentido de alterar o defasamento angular das tensões
entre as barras às quais estão conectados. Um diagrama simplificado de um dispositivo
defasador típico é mostrado na figura 2.20.
Como mostra a figura anterior, o controle do ângulo de fase é obtido através do
disparo de um conjunto de tiristores, que proporciona a injeção de uma tensão Vpq em série
com a linha de transmissão. Tal tensão, em quadratura com aquela do barramento controlado
VS, tem sua magnitude variada de acordo com a necessidade de avanço ou atraso do referido
ângulo [29].
2.5.4 COMPENSADORES ESTÁTICOS AVANÇADOS
A evolução dos dispositivos semicondutores com comutação forçada para altas
potências, como GTOs e IGBTs, tem permitido o desenvolvimento de conversores (VSI), como
mostrado na figura 2.21, para aplicação aos sistemas CA.
Assim, quando comparada aos métodos tradicionais de compensação baseados em
tiristores, a presente filosofia de compensadores estáticos apresenta características de
desempenho bastante elevadas. Além disso, os compensadores estáticos avançados oferecem
um potencial único de troca de potência ativa como sistema CA, simultânea e
independentemente do processo de compensação reativa [30], desde que conectados a algum
armazenador de energia. Dentre os equipamentos empregados nesta concepção, encontramse as versões avançadas dos compensadores paralelo, série e defasadores, abordados
anteriormente, os quais são comentados a seguir.
(a) Compensador Estático Avançado (ASVC)
Nos compensadores estáticos de reativos convencionais (CE ou SVC), descritos na
seção anterior, os tiristores funcionam simplesmente como elementos de controle. A variação
do ângulo de disparo de tais dispositivos altera a potência reativa gerada ou absorvida por
elementos passivos, sejam eles capacitores e reatores, respectivamente. Os ASVC’s (Advanced
Static Var Compensators), são também equipamentos que proporcionam o intercâmbio de
potência reativa, entretanto, fazem uso de uma fonte de tensão controlada, baseada em pontes
inversoras a GTO, como aquela mostrada na figura 2.21, conectada em paralelo com o sistema
CA como mostra a figura 2.22.
O ASVC gera, na sua saída, uma tensão trifásica еp com amplitude e ângulo de fase
controláveis, de forma análoga a um compensador síncrono rotativo, dando origem a uma
corrente ip, injetada no sistema para prover a compensação determinada pelo controle.
Os modos de operação do compensador série avançado possibilitam um intercâmbio,
tanto de potência ativa quanto reativa, entre o mesmo e o sistema CA, dependendo do
defasamento entre a tensão série injetada e a corrente na linha de transmissão.
(c) Defasadores e compensadores de funções múltiplas avançados (UPFC)
Os transformadores defasadores controlados a tiristores convencionais provêm da
variação do ângulo da tensão na barra controlada através da injeção de uma tensão em
quadratura com a mesma, cuja magnitude varia de uma forma discreta, através da variação dos
taps no transformador. Com isso, uma vez quea relação angular entre tal tensão e a corrente de
linha é arbitrária, o defasador deve estar apto a trocar (fornecer ou absorver) tanto potência
ativa como reativa com o sistema CA. Entretanto, como tal transformador não possui essa
capacidade interna, qualquer necessidade de fornecimento de potência por parte do defasador
para o sistema, a fim de gerar a tensão injetada, deve ser atendida pelo próprio sistema. O
mesmo raciocínio se aplica para o caso do defasador precisar absorver alguma potência. Assim,
para evitar as variações de tensão, associadas a tais situações, este tipo de defasador requer o
suporte de tensão proporcionado por uma fonte de reativos controlável, tal como um ASVC. Do
exposto se conclui que, o controle do ângulo de fase através de dispositivos avançados do tipo
fonte de tensão controlável (VSI), se mostra uma estratégia fundamentalmente diferente das
vistas até o momento. Assim, o princípio básico para o controle da referida grandeza é
fundamentado na união dos compensadores avançados paralelo (ASVC) e série (ASC). O
equipamento resultante de tal construção é denominado Controlador de Fluxo de Potência
Unificado ou UPFC (Unified Power Flow Controller), cujo esquema de conexão com o sistema CA
é mostrado na figura 2.24.
Como pode ser visto na figura anterior, o UPFC é constituído por dois conversores do
tipo VSI, alimentados a partir da mesma fonte de correntecontínua. Desse modo, o conversor 1
(paralelo) fornece a potência ativa requerida pelo conversor 2 (série) e além disso, provê a
compensação paralela de reativos. Já o Conversor 2 (série) gera, por si só, a potência reativa
necessária à compensação série. Face a isso, torna-se evidente que, além de controlar o ângulo
de fase, o UPFC desempenha as mesmas funções executadas pelos ASVCs e ASCs
separadamente, o que caracteriza uma das suas principais vantagens.
3 REATOR A NÚCLEO SATURADO
3.1 CONSIDERAÇÕES INICIAIS
De um modo geral, a implantação de compensadores estáticos a reator à núcleo
saturado (CERNS) em um sistema de potência deve ser precedida por estudos e avaliações
computacionais, para que o equipamento seja dimensionado e ajustado corretamente. Para
tanto, faz-se necessário o conhecimento detalhado dos seus princípios físicos de funcionamento
e a tradução destes em modelos matemáticos os quais, na sequência, geram rotinas nos
programas computacionais. Inicialmente, vale lembrar que, em contraste com o reator linear, o
reator saturado tem seu núcleo de forma fechada como o de um transformador (podendo
mesmo ter sido um deles originalmente) sem enrolamento de potência no secundário. A
diferença é que os transformadores não saturam à tensão de operação e têm corrente de
magnetização muito pequena em relação à corrente nominal. Por outro lado, os reatores
saturados são projetados para atingirem a saturação na tensão de operação, tendo, portanto,
que suportar correntes de magnetização bem mais elevadas. A não linearidade da curva B x H
do material constituinte do núcleo magnético do reator é que determina a operação do mesmo.
Enquanto a saturação não é atingida, a indutância apresentada pelo reator é alta e a corrente é
baixa. Após a saturação a indutância cai, permitindo o aumento da corrente. Devido a nãolinearidade fortemente presente na operação de núcleos magnéticos, nas análises de operação
dos reatores saturados, monofásicos e trifásicos, será demonstrado que o alto conteúdo
harmônico das suas correntes de alimentação restringem a sua aplicabilidade em sistemas de
potência. No entanto, através do aumento do número de unidades magnéticas e da
interconexão dessas unidades com enrolamentos especiais de bobinas, é possível cancelar
determinadas ordens harmônicas.
3.2 FUNDAMENTAÇÃO TEÓRICA
3.2.1 REATOR MONOFÁSICO
A título de simplificação, a não-linearidade de um material magnético pode ser
idealizada na forma de uma curva de saturação que se faz representar por um par de linhas
retas. A figura 3.1(a) ilustra esta consideração. Isto faz com que as duas regiões de correntes
sejam equivalentes às duas inclinações. Admitindo ainda uma outra hipótese simplificadora, a
qual se fundamenta no fato que, abaixo do ponto onde se inicia a saturação, a impedância do
reator é suposta como infinita, então a curva de saturação será aproximada pela curva (1)
indicada na figura 3.1(b). Nestas condições a forma de onda da corrente relacionada com o
funcionamento do reator se fará na forma de pulsos, os quais iniciam sua formação tão logo se
atinja o ponto de saturação e encerram quando o funcionamento determina uma magnetização
abaixo do referido ponto[24]. Se um circuito série simples, como o mostrado na figura 3.2(a), é
usado, a corrente, terá a forma de pulsos negativos e positivos discretos, com amplitude e forma
determinadas pela tensão de linha e(t) e pela impedância externa.
3.2.2 REATORES TRIFÁSICOS
Um reator saturado monofásico, embora capaz de promover a compensação de
reativos e controlar a tensão, tem como forte propriedade a desvantagem de introduzir
apreciáveis níveis de correntes harmônicas de ordem impar (3,5,7,9,11,13,.....) no sistema ao
qual se encontra conectado. Objetivando atenuar tais efeitos negativos, neste item são descritas
várias configurações de dispositivos trifásicos, visando reduzir o conteúdo harmônico das
correntes. O dispositivo trifásico mais simples consiste de 3 (três) reatores saturados
monofásicos conectados em estrela e com o ponto comum ligado ao neutro, conforme mostra
a figura 3.6(a). Neste caso o arranjo pode ser visto como 3 (três) circuitos básicos independentes
e, a corrente em cada fase obedece ao anteriormente estabelecido para o reator monofásico.
Nestas circunstâncias, as mesmas componentes ímpares se manifestam nas formas de onda
para cada fase, não trazendo, pois qualquer ganho em relação à meta almejada. Todavia, a mera
desconexão do neutro do reator (ou terra) do sistema resulta em expressivos ganhos. Esta
configuração está atrelada ao arranjo da figura 6(b).
Utilizando-se o diagrama do circuito da figura 3.6(b), isto é, o ponto comum-estrela
não é conectado ao neutro, os harmônicos triplos são excluídos pelo sistema trifásico. Cada
unidade opera sobre as mesmas leis físicas, como uma unidade isolada, mas restritas por
condições de limite. A tensão trifásica fornecida, para fins das análises e constatações feitas a
seguir, deve ser considerada equilibrada e com valor suficiente para levar as unidades à
saturação. Dentro destas hipóteses, as unidades do reator não são saturadas, a cada vez, por
um período de 180º / 3 = 60º, o qual ocorre 2 (duas) vezes em cada ciclo da freqüência de linha,
mas são saturadas no restante do ciclo. O grupo assim formado provocará correntes polifásicas
com harmônicas da ordem n= (6K ± 1) = 5, 7, 11, 13, ... A operação na metade do ciclo da
freqüência de linha é ilustrada de forma simplificada na figura 3.7. Os intervalos têm duração de
60°. No intervalo (I), o núcleo A não está saturado, não existindo, portanto qualquer corrente.
Contudo, neste mesmo período existirá corrente através dos enrolamentos dos núcleos
saturados B e C. A corrente é limitada somente pela indutância do sistema. Durante o intervalo
(II), os núcleos A e B estão saturados e experimentam corrente, enquanto que o núcleo C não
está saturado. No intervalo (III), no núcleo A continua a passar corrente, mas a trajetória de
retorno transfere-se para o núcleo C, agora saturado. E assim por diante... A figura 3.8 mostra
as formas de onda da corrente e tensão em um ciclo da freqüência de linha, que correspondem
aos intervalos mostrados na figura 3.7. Durante o intervalo (I), os núcleos B e C estão saturados,
enquanto que o núcleo A não está saturado. A tensão fase-fase VBC é aplicada sobre a
indutância do sistema das fases B e C, de modo que o ponto comum-estrela x do reator assume
o potencial médio de VBN e VCN, como mostrado nas figuras 3.7 e 3.8.
O núcleo A não está saturado e assim absorve a tensão aplicada entre o terminal da
fase A e o ponto comum-estrela x para o intervalo. Sendo limitada pela indutância do sistema,
a corrente flui do terminal C para o B como ilustrado na figura 3.7 com a forma de onda mostrada
na figura 3.8. No final do intervalo (I), o núcleo A satura enquanto que o núcleo C fica não
saturado. A corrente transfere-se do enrolamento do núcleo C para o núcleo A, enquanto a
corrente permanece no enrolamento do núcleo B. Durante o intervalo (II), o núcleo C absorve a
tensão aplicada entre o terminal da fase C e o ponto comum-estrela x, enquanto a tensão VAB
impulsiona a corrente iA através das indutâncias das fases A e B do sistema. A operação cíclica
continua através de seis intervalos de 60° graus para o ciclo de freqüência da linha.
3.2.3 REATORES DE SEIS UNIDADES
Conforme destacado anteriormente, um dos principais problemas associados com a
operação dos reatores saturados está no elevado conteúdo harmônico da sua corrente. Por este
motivo, a busca por soluções que venham a reduzir os níveis das distorções harmônicas
constitui-se em um tema de extrema relevância para o domínio desta tecnologia. Em
consonância com as experiências passadas, reportadas em artigos próprios à área, reconhecese que um reator de 6 (seis) unidades (ou colunas magnéticas), formado por dois arranjos físicos
de reatores trifásicos, constitui-se numa boa medida para se atingir a estas metas. Estas duas
estruturas físicas podem, ainda, serem conectadas em série ou paralelo, com cada unidade
operando sob as mesmas leis físicas que uma unidade isolada, respeitadas suas condições de
limite, as quais dependerão das disposições dos enrolamentos de cada unidade e do tipo de
conexão usado. No entanto, é certo dizer que o fluxo em cada unidade e, consequentemente, a
fem em cada enrolamento, para todas as unidades, serão portadoras de componentes
harmônicas de ordem (6K ± 1) = 5, 7, 11, 13, 17, ..., Esta situação, como se sabe, assume que o
ponto comum estrela ou os pontos do reator não são conectados ao neutro do sistema de
suprimento, e que, a tensão aplicada é elevada o suficiente para levar os núcleos à saturação.
Fixando como meta a eliminação ou redução das componentes harmônicas de linha de ordem
5° e 7°, pode-se, à princípio, imaginar duas soluções. Para o caso da conexão em série a solução
consiste em eliminar tais componentes em cada um dos reatores trifásicos que perfazem o
conjunto de 6(seis) unidades. Para o caso da conexão em paralelo, a estratégia consiste em
manter as harmônicas em cada uma das unidades trifásicas individuais e processar o
cancelamento quando da interligação das mesmas, fato este que se dera através de um
mecanismo de defasagem angular entre os equipamentos.
3.2.4 CONEXÕES SÉRIE E PARALELA
Objetivando atender aos propósitos supra mencionados, pode-se reconhecer várias
possibilidades de disposições de enrolamentos que asseguram a operação simétrica das
unidades. Uma delas consiste no uso de dois enrolamentos zig-zag com ângulo de 30° entre eles,
conectados em série ou paralelo, como ilustrado na figura 3.9. A técnica da compensação
angular encontra forte sustentação nas soluções clássicas empregadas pela eletrônica de
potência para a obtenção de sistemas retificadores de 12 pulsos, quando são exigidas duas
unidades retificadoras supridas através de transformadores defasados de 30°.
De modo a proporcionar a almejada defasagem de 30°, os enrolamentos são
projetados de acordo com o diagrama fasorial da figura 3.10(a), ou seja, com uma razão de
espiras 2 1 N = 0,366 N , assegurando assim uma família de 6 (seis) ondas das fmm’s (forças
magnetomotrizes) deslocadas de 30° uma da outra, utilizando um conjunto de correntes
trifásicas equilibradas. A fmm em cada núcleo é a soma das fmm’s nos enrolamentos daquele
núcleo. Assim sendo, F1 será, por exemplo, dado pela soma de 1 A N .I , em fase com a corrente
na fase A, com 2 C N .I, em oposição de fase com a corrente na fase C. O diagrama fasorial dos
fluxos é exatamente o mesmo, mas atrasado de 90°, como mostra a figura 3.10(b).
A componente fundamental, assim como os componentes harmônicos de ordem 5º e
7º da tensão entre a fase A e o ponto comum-estrela (ou pontos) são mostrados na figura 3.10(c)
e (d) para as conexões série e paralela, respectivamente. Para a conexão série, por exemplo, a
tensão VAX é a soma das fmm’s ( ) da forma d N dt ϕ nos enrolamentos a, b, c, e d indicados na
figura 3.9(a). Considerando a corrente IA como referência, a componente fundamental da
tensão 1 a1 dV = N dt ϕ está adiantada de 90° de Φ 1, por conseguinte, em fase com F1 e
atrasada 15° de IA. O 5º e o 7º harmônico desta tensão estão atrasados de IA por 15° x 5 = 75°
e 15° x 7 = 105° de IA, respectivamente. A componente fundamental da tensão 2 b2 dV = N dt
ϕ está em oposição fase com F2 e por conseguinte adiantada de 45° de IA e o 5º e o 7º
harmônicos estão adiantados de 45° x 5 = 225° e 45° x 7 = 315° de IA, respectivamente. O mesmo
procedimento pode ser aplicado às outras tensões. Do exposto segue que o 5º e o 7º harmônico
de tensão são nulos na conexão série, e o mesmo ocorrendo com as correntes no reator e nas
linhas. Na conexão paralela as tensões do reator apresentam o 5º e o 7º harmônico, sendo que
um desempenho similar se observa para as correntes do reator. No entanto, estes harmônicos
estão em oposição fase em cada zig-zag, e, por conseguinte, cancelam-se na interligação. As
correntes de linha não apresentam, portanto, o 5º e o 7º harmônico.
3.3 REATOR TWIN-TRIPLER
O termo Twin-tripler corresponde ao nome dado comercialmente para o reator de 6
(seis) unidades, composto por 2 (dois) enrolamentos zig-zag, com ângulo de 30° entre eles e,
conectados em série.
O arranjo físico para esta versão de reator saturado e o correspondente diagrama
fasorial das forças magnetomotrizes foram mostradas nas figuras 3.9 (a) e 3.10 (a). Uma outra
forma para a visualização de sua operação pode ser feita através do circuito mostrado na figura
3.11. Nesta, XS representa a indutância do sistema supridor, por fase. Considerando que a
tensão trifásica está equilibrada e elevada o suficiente para levar as unidades do reator à
saturação, durante meio ciclo da freqüência de linha, o reator twin-tripler passa por uma
seqüência operativa através da qual cada unidade passa por estágios seqüências de nãosaturação e saturação. No período de uma metade do ciclo, todos os fluxos nos núcleos
deslocam-se de -ΦS para +ΦS, pois os núcleos ficam não saturados. Durante a metade do ciclo
seguinte, os núcleos não são saturados em seqüência e os fluxos deslocam-se de +ΦS para -ΦS
para restaurar o estado inicial. Durante o tempo em que o núcleo está saturado, isto ocorre para
qualquer das duas condições +ΦS ou -ΦS, pelas correntes nos seus enrolamentos e sua
indutância é nula. Os modos operativos do reator saturado nos 6 (seis) intervalos de meio ciclo
são mostrados nos circuitos equivalentes na figura 3.12. A unidade não saturada, em cada
intervalo, deve absorver a maior parte da tensão da fonte trifásica nesse intervalo. O restante
da tensão é absorvido como queda de tensão na indutância do sistema. Como todas as unidades
têm 2 (dois) enrolamentos, as forças magnetomotrizes criadas pelas 2 (duas) correntes no
período não saturado produzem fmm’s equilibradas em zero.
Durante o intervalo I a Unidade 1 não está saturada para 30°. As correntes não têm
valor igual a zero, mas devem satisfazer a condição N1.iA = N2.iC, ou seja, iA = 0,366 iC, para
produzir zero ampére-espiras no núcleo da Unidade 1. Portanto, iB = -1,366 iC durante o
intervalo. Se os 2 (dois) enrolamentos da Unidade 1 não são iguais, tensões proporcionais ao
número de espiras devem aparecer nos enrolamentos com respeito aos pontos de polaridade.
As tensões são mostradas pelas áreas marcadas na figura 3.13. O enrolamento na fase A absorve
a área superior limitada por VA, enquanto que o enrolamento da fase C absorve a área inferior
limitada pela tensão VC. A linha que separa as 2 (duas) áreas representa a tensão entre o ponto
comum-estrela x e o neutro do sistema. Esta, corresponde a parte da tensão da forma -a cos ( ω
t – 15º), considerando ω t = 0 o início do intervalo I, e atinge a tensão VB em ω t = 15º. A
corrente iB é determinada pela tensão VBX, a qual é mostrada na figura 3.13 e é a parte da
tensão da forma -b sen ( ω t – 15º). O efeito desta na indutância do sistema é de produzir o pulso
unidirecional da corrente da forma () os b - cos ωt - 15 X . As correntes iA e iC são então,
respectivamente, -0,3661,366 e -11,366 de iB. Os intervalos subseqüentes seguem a seqüência
das correntes e formas de onda mostradas, respectivamente, nas figuras 3.12 e 3.13; cada
unidade usa intervalos de tempo próprios para absorver a maior parte da tensão da fonte
trifásica e estabelecer a distribuição de corrente de seu intervalo. As correntes aproximam-se
de um conjunto trifásico com harmônicos de ordens mais altas.
3.4 REATOR TREBLE-TRIPLER
O reator treble-tripler constitui-se numa concepção mais avançada do que o twintripler. Este arranjo apresenta vantagens adicionais, em relação à sua versão anterior, pelo fato
que proporciona uma compensação ainda melhor das distorções harmônicas das correntes
produzidas pelo equipamento. O trebletripler, devido ao fato de produzir um cancelamento
quase total das componentes harmônicas até a ordem 35, oferece uma corrente muito próxima
da senoidal. Conforme ilustrado na figura 3.15, o treble-tripler é constituído por um conjunto
de 9 (nove) núcleos sendo que 3 (três) destes núcleos têm 2 (dois) enrolamentos e os núcleos
restantes possuem 3 (três) enrolamentos [24]. Por este motivo a solução é mais onerosa e
limitada a aplicações onde a questão de harmônicos é crucial.
Os números de espiras dos enrolamentos primários (N1, N2 e N3) são determinados
de modo a haver um intervalo de tempo na passagem por zero de duas fmm’s consecutivas de
20°, fato este que determina a compensação harmônica necessária. Além dos enrolamentos
primários há ainda os enrolamentos secundários (NS) que são fechados em delta e alimentam
um reator saturado auxiliar. Este arranjo tem por finalidade minimizar as harmônicas
características de ordem 18K ±1, ou seja, de ordem 17ª, 19ª, 35ª, 37ª, etc.