MEEC
Mestrado em Engenharia Electrotécnica e de Computadores
MCSDI
Modelação e Controlo de Sistemas Dinâmicos
Exercícios de
Análise de Sistemas no Espaço de Estados
Conjunto de exercícios elaborados pelos docentes José Tenreiro Machado (JTM), Manuel Santos Silva (MSS),
Vítor Rodrigues da Cunha (VRC) e Jorge Estrela da Silva (JES).
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
⎡ − 6 4⎤
1. Considere a matriz A = ⎢
⎥.
⎣ − 2 0⎦
a) Calcule os valores próprios e os vectores próprios de A.
⎡y ⎤
⎡ x ⎤ ⎡1⎤ ⎡ x ⎤ ⎡1⎤ ⎡ x ⎤ ⎡2⎤
b) Considere os vectores ⎢ 1 ⎥ = ⎢ ⎥ , ⎢ 1 ⎥ = ⎢ ⎥ e ⎢ 1 ⎥ = ⎢ ⎥ . Calcule e represente graficamente ⎢ 1 ⎥ =
⎣ y2 ⎦
⎣ x2 ⎦ ⎣1⎦ ⎣ x2 ⎦ ⎣2⎦ ⎣ x2 ⎦ ⎣1⎦
⎡x ⎤
A⎢ 1 ⎥ .
⎣ x2 ⎦
Comente os resultados.
2. Considere o sistema &y&& + 9 &y& + 26 y& + 24 y = u& + 4u . A sua representação no espaço dos estados, com
x = [x1 x 2 x 3 ]T , x& = [x&1 x& 2 x& 3 ]T , vem:
a) Na forma canónica controlável:
⎧
1
0 ⎤ ⎡0 ⎤
⎡ 0
⎪
⎢
0
1⎥⎥ x + ⎢⎢0⎥⎥u
⎪x& = ⎢ 0
A) ⎨
⎢⎣− 24 − 26 − 9⎥⎦ ⎢⎣1⎥⎦
⎪
⎪ y = [4 1 0]x
⎩
⎧
0
0 ⎤ ⎡0 ⎤
⎡− 2
⎪
⎢ 0 −3
&
x
=
0⎥⎥ x + ⎢⎢0⎥⎥u
⎪
⎢
C) ⎨
⎢⎣ 0
0 − 4⎥⎦ ⎢⎣1⎥⎦
⎪
⎪ y = [1 0 0]x
⎩
b) Na forma canónica observável:
⎧
1
0 ⎤ ⎡0 ⎤
⎡ 0
⎪
⎢
&
0
1⎥⎥ x + ⎢⎢0⎥⎥u
⎪x = ⎢ 0
A) ⎨
⎢⎣− 24 − 26 − 9⎥⎦ ⎢⎣1⎥⎦
⎪
⎪ y = [4 1 0]x
⎩
⎧
0
0 ⎤ ⎡0 ⎤
⎡− 2
⎪
⎢
0⎥⎥ x + ⎢⎢0⎥⎥u
⎪x& = ⎢ 0 − 3
C) ⎨
⎢⎣ 0
0 − 4⎥⎦ ⎢⎣1⎥⎦
⎪
⎪ y = [1 0 0]x
⎩
⎧
⎡ − 9 1 0⎤ ⎡0 ⎤
⎪
⎢
⎥ ⎢ ⎥
⎪x& = ⎢− 26 0 1⎥ x + ⎢1 ⎥u
B) ⎨
⎢⎣− 24 0 0⎥⎦ ⎢⎣4⎥⎦
⎪
⎪ y = [1 0 0]x
⎩
D) Outro resultado
⎧
⎡ − 9 1 0⎤ ⎡0 ⎤
⎪
⎢
⎥ ⎢ ⎥
&
⎪x = ⎢− 26 0 1⎥ x + ⎢1 ⎥u
B) ⎨
⎢⎣− 24 0 0⎥⎦ ⎢⎣4⎥⎦
⎪
⎪ y = [1 0 0]x
⎩
D) Outro resultado
⎧ x& = Ax + Bu
3. Considere um sistema representado no espaço dos estados, tal que ⎨
. Então, a correspondente
⎩ y = Cx + Du
função de transferência Y(s)/U(s) vem:
A) Y(s ) = [C(sI − A )]−1B + D
U(s )
Y(s )
C)
= C(sI − A )B + D
U(s )
B) Y(s ) = C(sI − A )−1B + D
U(s )
D) Y(s ) = C sI − A −1 B + D
U(s )
(
)
1
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
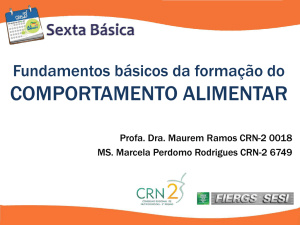
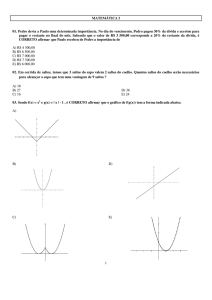
4. Considere a representação de um sistema no espaço dos estados da figura.
5
−2
u
+
3
+
+
∫
x
4
y
−
Então, vem:
⎧ x& = 5 x + 2u
A) ⎨
⎩ y = 4 x − 3u
⎧ x& = 3x − 2u
B) ⎨
⎩ y = 5 x + 4u
⎧ x& = −2 x + 3u
C) ⎨
⎩ y = −4 x + 5u
D) Outro resultado
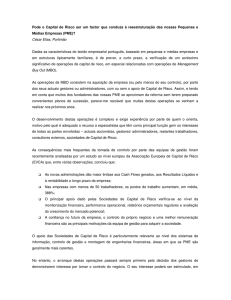
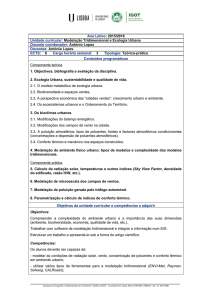
5. Considere o sistema com o diagrama de blocos da figura.
Então, a sua representação no espaço
dos
x& = [x&1
estados,
com
x& 2 ] , vem:
x = [x1
x 2 ]T
2
T
3
⎧
⎡3⎤
⎡2 − 1⎤
⎪x& = ⎢
⎥ x + ⎢5⎥u
4
0
A) ⎨
⎣
⎦
⎣ ⎦
⎪ y = [2 6]x
⎩
⎧
⎡3⎤
⎡ 0 4⎤
⎪x& = ⎢
⎥ x + ⎢5⎥u
B) ⎨
1
2
−
⎣ ⎦
⎦
⎣
⎪ y = [6 2]x
⎩
⎧
⎡2⎤
⎡ 2 4⎤
x + ⎢ ⎥u
⎪x& = ⎢
⎥
C) ⎨
⎣6 ⎦
⎣ − 1 0⎦
⎪ y = [3 5]x
⎩
+
+
∫
x1
2
+
4
+
u
+
−1
5
+
+
∫
y
x2
6
D) Outro resultado
2
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
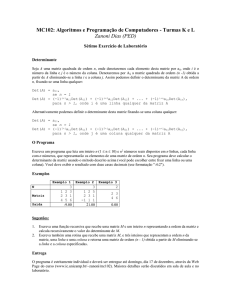
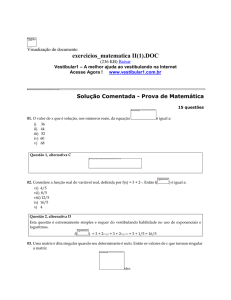
6. Considere o sistema com o diagrama de blocos da figura.
−2
A sua representação no espaço dos
estados, com x = [x1
x 2 ]T vem:
−3
⎧
⎡2 7 ⎤ ⎡3⎤
⎪x& = ⎢
⎥ x + ⎢ ⎥u
A) ⎨
⎣ 5 8⎦ ⎣5⎦
⎪ y = [4 9]x
⎩
+
+
x1
∫
4
+
8
+
u
⎧
⎡− 2 − 7⎤ ⎡− 3⎤
x+
u
⎪x& = ⎢
B) ⎨
5⎥⎦ ⎢⎣ 5 ⎥⎦
⎣ 8
⎪ y = [4 − 9]x + 10 u
⎩
+
−7
5
⎧
⎡2 − 7 ⎤ ⎡ 3 ⎤
x+
u
⎪x& = ⎢
C) ⎨
5⎥⎦ ⎢⎣− 5⎥⎦
⎣8
⎪ y = [4 9]x − 10 u
⎩
+
+
∫
y
x2
−9
+
+
+
5
10
D) Outro resultado
7. Considere o sistema com o diagrama de blocos da figura.
Então, a função
Y(s)/U(s), vem:
de
A) Y(s)/U(s) = 1 / (s + 1)
−3
transferência
0
2
+
+
∫
x1
−1
+
B) Y(s)/U(s) = 2 / [(s + 1) (s + 2)]
C) Y(s)/U(s) = 3 / [(s + 1) (s + 3)]
2
+
u
D) Outro resultado
+
−1
2
+
+
∫
y
x2
0
3
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
8. Considere o sistema com o diagrama de blocos da figura com x = [x1
x 2 ]T x& = [x&1
x& 2 ]T .
−3
2
+
+
∫
x1
5
+
1
+
u
+
−1
3
+
+
∫
y
x2
7
+
−9
a) A representação no espaço dos estados, vem:
⎧
⎧
⎡3 − 1⎤ ⎡2⎤
⎡ 3 − 1⎤ ⎡ 2 ⎤
x + ⎢ ⎥u
⎪x& = ⎢
⎪x& = ⎢
⎥
⎥ x + ⎢ ⎥u
A) ⎨
B) ⎨
⎣− 1 9⎦ ⎣− 3⎦
⎣ 1 9⎦ ⎣ 3⎦
⎪ y = [7 5]x
⎪ y = [7 − 5]x
⎩
⎩
⎧
⎡− 3 − 1⎤ ⎡2⎤
⎪x& = ⎢
⎥ x + ⎢ ⎥u
D) Outro resultado
C) ⎨
⎣ 1 − 9 ⎦ ⎣ 3⎦
⎪ y = [5 7]x
⎩
b) A função de transferência do sistema Y(s)/U(s) vem:
Y(s )
Y(s )
s + 15
3s + 12
B)
A)
=
=
U(s ) s 2 + 2 s + 8
U (s ) s 2 + 12 s + 8
Y(s )
31s + 152
= 2
D) Outro resultado
C)
U(s ) s + 12 s + 28
⎧
⎡ − 6 4⎤
⎡ 0⎤
x + ⎢ ⎥u
⎡ x1 ⎤
⎪x& = ⎢
⎥
9. Considere o sistema com a representação: ⎨
⎣ − 2 0⎦
⎣1 ⎦ ; x = ⎢ x ⎥
⎣ 2⎦
⎪ y = [1 0]x
⎩
a) Calcule a matriz exponencial pelo método de Cayley-Hamilton e através da Transformada de Laplace.
b) Calcule a função de transferência Y(s)/UI(s).
c) Faça a representação do sistema através de um diagrama de blocos e obtenha a função de transferência a partir
deste.
4
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
10. Considere o circuito da figura.
+
R1
u
x
L
R2
−
Uma representação no espaço dos estados, adoptando variáveis com “sentido físico”, onde x corresponde à
corrente na indutância, vem:
R
R1
1
1
u
B) x& = −
x+
u
A) x& = − 1 x +
LR 2
LR 2
L(R1 + R 2 )
L(R1 + R 2 )
C) x& = −
R1
⎛R
⎞
L⎜⎜ 1 + 1⎟⎟
⎝ R2
⎠
x+
1
⎛R
⎞
L⎜⎜ 1 + 1⎟⎟
⎝ R2
⎠
u
D) Outro resultado
11. Considere o circuito da figura.
L
i(t)
+
x2
C
x1
R
y(t)
−
a) Uma representação no espaço dos estados, adoptando variáveis com “sentido físico” x = [x1
x& = [x&1
x& 2 ]T , vem:
⎧
1⎤
⎡
⎪
⎢ 0 − L⎥ ⎡1⎤
x + ⎢ ⎥i(t )
⎪x& = ⎢
L⎥ ⎢L⎥
1
A) ⎨
⎢
⎥
−
⎣0⎦
⎪
R⎦
⎣C
⎪
⎩ y (t ) = [0 − R ]x
⎧
⎡ 0 −1 ⎤ ⎡ 0 ⎤
⎪⎪x& = ⎢ 1
C ⎥ x + ⎢ 1 ⎥i(t )
B) ⎨
⎢⎣ R − R ⎥⎦ ⎢⎣ R ⎥⎦
⎪
⎪⎩ y (t ) = [1 0]x
⎧
1⎤
⎡
⎪
⎢0 − C⎥ ⎡1 ⎤
x + ⎢ ⎥i(t )
⎪x& = ⎢
R ⎥ ⎢C ⎥
1
C) ⎨
⎢
− ⎥ ⎣0⎦
⎪
L⎦
⎣L
⎪
(
)
[
]x
=
y
t
R
0
⎩
D) Outro resultado
b) A função de transferência Y(s)/I(s) vem:
Y(s )
R
A)
= 2
I(s ) s LC + sRC + 1
Y(s )
sL
= 2
C)
I(s ) s L + sC + R
B)
x 2 ]T e
Y(s )
1
= 2
I(s ) s + sLC + RC
D) Outro resultado
5
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
12. Considere o circuito da figura seguinte.
R1
+
u
−
x2
R2
+
y1=x1
−
C
L
+
y2
−
R3
a) Uma representação no espaço dos estados, adoptando variáveis com “sentido físico” x(t ) = [x1 (t ) x 2 (t )]T e
x& = [x&1
x& 2 ]T , y (t ) = [ y1 (t ) y 2 (t )]T , vem:
⎧
1
⎤
⎡
0
⎤
⎪
⎥ ⎡
⎢ 0
L
R1
⎥u (t )
⎢
⎪x& = ⎢
x
+
⎥
R1
1
⎢
⎪
⎥
⎢
−
−
C (R1 + R 2 + R3 ) ⎥⎦
⎪
C (R1 + R 2 + R3 ) ⎦⎥ ⎣
A) ⎨
⎣⎢ C
⎪
0
0
⎤ ⎡
⎡1
⎤
⎪
R1
1
⎥
⎢
⎥u (t )
⎢
y
x
+
=
⎪
⎢0 − R + R + R ⎥ ⎢ R + R + R ⎥
⎪⎩
2
3⎦
1
2
3⎦
⎣ 1
⎣
⎧ ⎡
1
⎤
0
⎤
⎪ ⎢ 0
⎥ ⎡
C
R 2 + R3
⎥u (t )
⎢
⎪= ⎢
x
+
⎥
⎪ ⎢− 1 − R1 (R 2 + R3 ) ⎥ ⎢ L(R + R + R ) ⎥
1
2
3 ⎦
⎪
L(R1 + R 2 + R3 ) ⎦⎥ ⎣
B) x& ⎨ ⎣⎢ L
⎪
0
0
⎤
⎤ ⎡
⎡1
⎪
R1 R 2
R2
⎥u (t )
⎥x + ⎢
⎪ y = ⎢0 −
⎥
⎢
⎢
⎪⎩
R1 + R 2 + R3 ⎦ ⎣ R1 + R 2 + R3 ⎥⎦
⎣
⎧
0
C
⎤
⎤ ⎡
⎡ 0
⎪x& = ⎢ 1
R1 (R 2 + R3 ) ⎥ x + ⎢
R 2 + R3
⎥u (t )
⎪⎪
⎢ − L − L (R + R + R ) ⎥ ⎢ L (R + R + R ) ⎥
1
2
3 ⎦
1
2
3 ⎦
⎣
⎣
C) ⎨
⎪
0 ⎤ ⎡0⎤
⎡1
⎪y = ⎢
⎥ x + ⎢ ⎥u (t )
⎪⎩
⎣0 − R1 R 2 ⎦ ⎣ R 2 ⎦
D) Outro resultado
b)
Se
Δ = s 2 LC (R1 + R 2 + R3 ) + sR1 (R 2 + R3 )C + R1 + R 2 + R3
então
a
matriz
de
transferência
⎡ Y1 (s )⎤ ⎡ G 1 (s )⎤
⎢Y (s )⎥ = ⎢G (s )⎥U (s ) vem:
⎣ 2 ⎦ ⎣ 2 ⎦
1
⎡
⎤
R1 R 2
⎢
⎥
−
C
⎢ R +R +R ⎥
2
3
⎣ 1
⎦
1
⎡ G (s )⎤ R (R + R3 ) ⎡⎢ R (R + R ) ⎤⎥
1
2
3
C) ⎢ 1 ⎥ = 1 2
⎢− R + R + R C ⎥
Δ
⎣G 2 (s )⎦
2
3
⎦
⎣ 1
⎡ G (s )⎤ R + R3
A) ⎢ 1 ⎥ = 2
Δ
⎣G 2 (s )⎦
⎡ G (s )⎤ R R
B) ⎢ 1 ⎥ = 2 3
Δ
⎣G 2 (s )⎦
1
⎡
⎤
R1 + R 2
⎢
⎥
−
C
⎢ R +R +R ⎥
2
3
⎣ 1
⎦
D) Outro resultado
6
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
13. Considere o circuito representado na figura. Calcule a sua representação por variáveis de estado com sentido
físico.
R1
+
-
L1
u(t)
L2
R2
C
y(t)
14. Considere o circuito representado na figura. Calcule a sua representação por variáveis de estado com sentido
físico. Considere que para t=0, i1= i2= i3=0.
L2
v
v
2
1
i2
i3
i
C2
i1
y
C1
L1
L3
0⎤ ⎡1⎤
⎡− 3
15. Considere o sistema com uma representação no espaço dos estados x& = ⎢
⎥ x + ⎢ ⎥u onde
⎣ − 1 − 2 ⎦ ⎣0 ⎦
x = [x1
x 2 ]T . Então, a matriz exponencial e At vem:
⎡ 3e −3t
A) e At = ⎢
− 2t
+ e −3t
⎢⎣e
⎡e −2t + e −3t
C) e At = ⎢
− 2t
− e −3t
⎣⎢e
2e −2t ⎤
⎥
e −2t ⎥⎦
−1 ⎤
⎥
e −3t ⎦⎥
⎡e −2t
0 ⎤
B) e At = ⎢
⎥
e −3t ⎥⎦
⎢⎣ 0
⎡
e −3t
D) e At = ⎢
− 2t
+ e −3t
⎣⎢− e
0 ⎤
⎥
e − 2t ⎦⎥
16. Considere um sistema linear e a sua representação no espaço dos estados, com x = [x1
x 2 ]T x& = [x&1
x& 2 ]T
3⎤ ⎡ 1 ⎤
⎡− 2
e x& = ⎢
⎥ x + ⎢ ⎥u , y = [6 5]x . Então:
⎣ − 3 − 2⎦ ⎣− 3⎦
a) A matriz do sistema tem um par de valores próprios complexos conjugados λ12 dados por:
B) λ12 = −2 ± j 3
C) λ12 = −3 ± j 2
D) λ12 = 3 ± j 2
A) λ12 = 2 ± j 3
b) Pode afirmar-se que o sistema é:
A) Sobreamortecido
B) Subamortecido
C) Instável
D) Com amortecimento crítico
7
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
1
0 ⎤ ⎡0 ⎤
⎡ 0
0
1⎥⎥ x + ⎢⎢0⎥⎥u ,
17. Considere um sistema representado no espaço dos estados na forma x& = ⎢⎢ 0
⎢⎣− 15 − 11 − 5⎥⎦ ⎢⎣1⎥⎦
y = [1 0 0]x , com x = [x1 x 2 x 3 ]T , x& = [x&1 x& 2 x& 3 ]T .
a) A sua representação no espaço dos estados, na forma diagonal, vem:
⎧
⎧
0⎤
0⎤
⎡− 1 0
⎡ −1 2
⎡− 1⎤
⎡ − 1 8⎤
⎪& ⎢
⎪& ⎢
⎥
⎢
⎥
⎥
0⎥ d + ⎢ 1 ⎥ u
0⎥d + ⎢⎢ 1 8 ⎥⎥u
⎪d = ⎢ 0 − 1
⎪d = ⎢− 2 − 1
B) ⎨
A) ⎨
⎢⎣ 0 0 − 3⎥⎦
⎢⎣ 0 0 − 3⎥⎦
⎢⎣ 1 ⎥⎦
⎢⎣ 1 8 ⎥⎦
⎪
⎪
⎪ y = [1 1 1]x
⎪ y = [1 1 0]x
⎩
⎩
⎧
⎡ 1 − 2 0⎤
⎡1 8⎤
⎪& ⎢
⎥
1 0⎥d + ⎢⎢1 8⎥⎥u
⎪d = ⎢− 2
C) ⎨
⎢⎣ 0
⎢⎣1 8⎥⎦
0 3⎥⎦
⎪
⎪ y = [0 1 0]x
⎩
⎧
⎡1 2
⎪& ⎢
⎪d = ⎢2 1
D) ⎨
⎢⎣0 0
⎪
⎪ y = [− 1 8
⎩
0⎤
⎡− 1⎤
⎥
0⎥d + ⎢⎢ 1 ⎥⎥u
⎢⎣ 1 ⎥⎦
3⎥⎦
1 8 1 8]x
b) A função de transferência Y(s)/U(s) do sistema vem:
Y(s )
Y(s )
s2
s
=
A)
=
B)
2
2
U(s ) (s + 3) s + 2 s + 5
U(s ) (s + 3) s + 2s + 5
C)
(
)
(
)
Y(s )
1
=
2
U(s ) (s + 3) s + 2 s + 5
(
)
D) Outro resultado
18. Considere um sistema representado no espaço dos estados de acordo com o diagrama de blocos da figura.
u
3
+
∫
x1
y
4
+
−2
a)
A) O sistema é controlável e é observável
C) O sistema é controlável e não é observável
B) O sistema não é controlável e é observável
D) O sistema não é controlável e não é observável
b) A função de transferência Y(s)/U(s) do sistema vem:
Y(s )
7
Y(s )
2
=
=
B)
A)
U(s ) s − 2
U(s ) s + 4
Y(s )
12
=
C)
D) Outro resultado
U(s ) s + 3
19. Considere um sistema descrito pela função de transferência:
Y (s )
s+3
.
= 2
U (s ) s + 3s + 2
Faça a sua representação por variáveis de estado na:
a) Forma canónica controlável.
b) Forma canónica observável.
8
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
20. Considere os sistemas com os diagramas de blocos da figura. Seja x = [x1
u
+
∫
x2
−
+
−
λ
x1
∫
y
∫
x 2 ]T x& = [x&1
x2
+
−
+
−
λ
x& 2 ]T .
∫
x1
λ
λ
y
Sistema 1
Sistema 2
a) A representação do sistema 1 no espaço dos estados, vem:
⎧
⎧
1⎤ ⎡1⎤
1⎤ ⎡0⎤
⎡− λ
⎡− λ
x + ⎢ ⎥u
⎪x& = ⎢
⎪x& = ⎢
⎥
⎥ x + ⎢ ⎥u
A) ⎨
B) ⎨
⎣ 1 − λ ⎦ ⎣1⎦
⎣ 0 − λ ⎦ ⎣1 ⎦
⎪ y = [1 1]x
⎪ y = [1 0]x
⎩
⎩
⎧
1⎤ ⎡1⎤
⎡− λ
⎪x& = ⎢
⎥ x + ⎢ ⎥u
C) ⎨
⎣ 0 − λ ⎦ ⎣0⎦
⎪ y = [0 1]x
⎩
D) Outro resultado
b) A representação do sistema 2 no espaço dos estados, vem:
⎧
⎧
1⎤ ⎡1⎤
1⎤ ⎡0⎤
⎡− λ
⎡− λ
x + ⎢ ⎥u
⎪x& = ⎢
⎪x& = ⎢
⎥
⎥ x + ⎢ ⎥u
A) ⎨
B) ⎨
⎣ 1 − λ ⎦ ⎣1⎦
⎣ 0 − λ ⎦ ⎣1 ⎦
⎪ y = [1 1]x
⎪ y = [1 0]x
⎩
⎩
⎧
1⎤ ⎡1⎤
⎡− λ
⎪x& = ⎢
⎥ x + ⎢0⎥ u
C) ⎨
D) Outro resultado
−
λ
0
⎣
⎦ ⎣ ⎦
⎪ y = [0 1]x
⎩
c) Estudando a controlabilidade e a observabilidade do sistema 1 verifica-se que:
A) O sistema 1 é controlável e é observável
B) O sistema 1 não é controlável e é observável
C) O sistema 1 é controlável e não é observável
D) O sistema 1 não é controlável e não é observável
d) Estudando a controlabilidade e a observabilidade do sistema 2 verifica-se que:
A) O sistema 2 é controlável e é observável
B) O sistema 2 não é controlável e é observável
C) O sistema 2 é controlável e não é observável
D) O sistema 2 não é controlável e não é observável
21. Considere um sistema linear e a sua representação no espaço dos estados, com x = [x1
x 2 ]T e
2⎤ ⎡ 1 ⎤
⎡− 3
x& = ⎢
⎥ x + ⎢ ⎥u . Então,
⎣− 2 − 3⎦ ⎣− 3⎦
a) A matriz do sistema tem um par de valores próprios complexos conjugados λ12 dados por:
A) λ12 = 2 ± j 3
B) λ12 = −2 ± j 3
C) λ12 = −3 ± j 2
D) λ12 = 3 ± j 2
b) A) O sistema é controlável
B) O sistema não é controlável
22. Considere um sistema linear e a sua representação no espaço dos estados, com x = [x1
x 2 ]T x& = [x&1
0⎤ ⎡ 1 ⎤
⎡− 2
e x& = ⎢
⎥ x + ⎢ ⎥u , y = [6 5]x . Então:
⎣ 0 − 4⎦ ⎣− 3⎦
a) A matriz do sistema tem valores próprios λ1 e λ2 dados por:
A) λ1 = 1, λ2 = −3
B) λ1 = 6, λ2 = 5
C) λ1 = −2, λ2 = −4
D) Outro resultado
b) Pode afirmar-se que o sistema é:
A) Não-controlável
B) Não-observável
D) Instável
C) Controlável
x& 2 ]T
9
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
⎡ 1 − 1⎤
⎡1⎤
x + ⎢ ⎥u , y = [− 2 1]x ,
⎥
⎣6 − 4 ⎦
⎣− 3⎦
23. Considere um sistema e uma representação no espaço dos estados x& = ⎢
x = [x1 x 2 ]T . Então, vem:
a) A) O sistema é controlável
b) A) O sistema é observável
c) Analise a FT deste sistema.
B) O sistema não é controlável
B) O sistema não é observável
0 ⎤ ⎡ 3⎤
⎡− 4
24. Considere um sistema representado no espaço dos estados x& = ⎢
⎥ x + ⎢ ⎥u , y = [2 0]x com
⎣ 0 − 5⎦ ⎣0⎦
x = [x1 x 2 ]T .
Estudando a estabilidade, a controlabilidade e a observabilidade do sistema verifica-se que:
a) A) O sistema é controlável
B) O sistema não é controlável
b) A) O sistema é observável
B) O sistema não é observável
c) A) O sistema é estável
B) O sistema não é estável
d) A função de transferência Y(s)/U(s) do sistema vem:
D) Outro resultado
Y(s )
Y(s )
Y(s )
6
5
6
=
=
=
B)
C)
A)
U(s ) s + 4
U(s ) (s + 4)(s + 5)
U(s ) s + 5
25. Considere um sistema representado no espaço dos estados na forma x& = Ax + Bu , y = Cx , com
0⎤
⎡ 2 0
⎡1⎤
⎢
⎥
0⎥ , B = ⎢⎢0⎥⎥ , C = [1 0 0] e x = [x1
A=⎢ 1 3
⎢⎣− 1 2 − 5⎥⎦
⎢⎣0⎥⎦
x2
x 3 ]T .
a) A função de transferência Y(s)/U(s) do sistema vem:
Y(s )
Y(s )
Y(s )
1
1
1
B)
C)
A)
=
=
=
U(s ) s − 2
U(s ) (s − 3)(s + 5)
U(s ) (s − 2)(s + 5)
b) Pode dizer-se que o sistema:
A) É observável e é controlável
C) Não é observável e não é controlável
D)
Y(s )
1
=
U(s ) (s − 2)(s − 3)(s + 5)
B) Não é observável e é controlável
D) É observável e não é controlável
26. Considere o sistema:
6⎤
⎡ 0
⎡0 ⎤
x& = ⎢
x + ⎢ ⎥u
⎥
⎣− 1 − 5⎦
⎣1⎦
a) Calcule Φ (t ) = e At .
b) Calcule x(t) para u(t)=1, t>0.
10
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
27. Considere um sistema representado no espaço dos estados e o correspondente diagrama de blocos da figura.
Então:
a) Pela análise da estabilidade:
A) Pode concluir-se que o sistema é
estável
B) Pode concluir-se que o sistema é
instável
C) Nada se pode concluir sobre a
estabilidade do sistema
+
1
∫
x1
2
+
−1
u
x2
∫
b) Pela análise da controlabilidade:
A) Pode concluir-se que o sistema é
controlável
B) Pode concluir-se que o sistema não é
controlável
C) Nada se pode concluir sobre a
controlabilidade do sistema
+
3
+
y
+
+
−2
+
2
x3
∫
4
+
+1
28. Considere um sistema representado no espaço dos estados de acordo com o diagrama de blocos da figura
onde bi, ci, λi ∈ℜ, i=1,2,3.
Seja b1 = −b2 , λ1 = λ2, c1 = c2, então:
b1
+
B)
λ1
u
b2
+
∫
x2
c2
+
+
+
y
+
λ2
c3
Y(s )
=
U(s ) s − λ 3
Y(s )
1
=
U(s ) s + λ 3
D) Outro resultado
C)
c1
+
a)
A) O sistema é controlável
B) O sistema não é controlável
b) Nas condições referidas antes a
função de transferência Y(s)/U(s) do
sistema vem:
Y(s ) b3 c 3
=
A)
U(s ) s − λ 3
∫
x1
b3
+
∫
x3
c3
+
λ3
11
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
29. Considere o sistema com o diagrama de blocos da figura.
−3
−1
+
+
∫
x1
2
+
2
+
u
+
−1
1
+
+
∫
y
x2
3
a) A sua representação no espaço dos estados, com x = [x1
x 2 ]T x& = [x&1
x& 2 ]T , vem:
⎧
⎡ − 3 0⎤ ⎡ 1 ⎤
⎪x& = ⎢
⎥ x + ⎢ ⎥u
A) ⎨
⎣ − 1 2⎦ ⎣− 1⎦
⎪ y = [3 2]x
⎩
⎧
⎡ − 3 2⎤ ⎡ 2⎤
⎪x& = ⎢
⎥ x + ⎢ ⎥u
B) ⎨
⎣ − 1 0⎦ ⎣ 3⎦
⎪ y = [− 1 1]x
⎩
⎧
⎡− 3 − 1⎤ ⎡− 1⎤
⎪x& = ⎢
⎥ x + ⎢ ⎥u
C) ⎨
⎣ 2 0⎦ ⎣ 1 ⎦
⎪ y = [2 3]x
⎩
D) Outro resultado
b) A sua representação matricial no espaço dos estados, na forma diagonal, vem:
⎧
⎧
⎧
0⎤ ⎡ 0 ⎤
⎡− 1
⎡ 1 0⎤ ⎡− 1⎤
⎡ 1 0⎤ ⎡ − 1 ⎤
x + ⎢ ⎥u
x + ⎢ ⎥u
⎪x& = ⎢
⎪x& = ⎢
⎪x& = ⎢
⎥
⎥
⎥ x + ⎢ ⎥u
A) ⎨
B) ⎨
C) ⎨
⎣0 2⎦ ⎣− 1⎦
⎣ 0 − 2⎦ ⎣− 1⎦
⎣0 2 ⎦ ⎣ − 2 ⎦
⎪ y = [2 3]x
⎪ y = [− 4 − 1]x
⎪ y = [− 1 − 2]x
⎩
⎩
⎩
c) A matriz exponencial Φ(t) = eAt vem:
⎡e −2t − 2e −t 2e −2t − 2e −t ⎤
A) Φ(t ) = ⎢ −t
⎥
− 2t
e −t − 2e − 2t ⎦⎥
⎣⎢ e − e
⎡ 2e −2t − e −t
C) Φ(t ) = ⎢ −t
− 2t
⎣⎢2e − 2e
e −2t − e −t ⎤
⎥
2e −t − e − 2t ⎦⎥
⎡ e −2t + e −t
B) Φ(t ) = ⎢ − 2t
−t
⎣⎢e − 2e
D) Outro resultado
e −2t − e −t ⎤
⎥
e −t + 2e − 2t ⎦⎥
D) Outro resultado
d) A função de transferência Y(s)/U(s) do sistema vem:
Y(s )
Y(s )
Y(s )
1
1
1
=
=
=
B)
C)
A)
U(s ) s + 2
U(s ) (s + 1)(s + 2)
U(s ) s + 1
D) Outro resultado
e) Estudando a controlabilidade e a observabilidade do sistema verifica-se que:
A) O sistema é controlável e é observável
B) O sistema não é controlável e é observável
C) O sistema é controlável e não é observável
D) O sistema não é controlável e não é observável
12
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
1
0⎤
⎡ 0
⎧ x& = Ax + Bu
0
1 ⎥⎥ , B =
30. Considere o sistema ⎨
onde A = ⎢⎢ 0
⎩ y = Cx
⎢⎣− 15 − 11 − 5⎥⎦
⎡0 ⎤
⎢0⎥ , C = [1 0 0]
⎢ ⎥
⎢⎣1⎥⎦
a) Calcule os valores próprios e os vectores próprios.
b) Represente o sistema na forma diagonal e esboce o correspondente diagrama de blocos.
⎡1⎤
⎡0 ⎤
⎡1⎤ ⎡5 ⎤
⎢
⎥
⎢
⎥
c) Considere a condição inicial: x (0) = 3⎢ − 1⎥ + 4 ⎢ 2 ⎥ + 2 ⎢⎢− 3⎥⎥ = ⎢⎢ − 1⎥⎥ .
⎢⎣− 3⎥⎦
⎢⎣− 4⎥⎦
⎢⎣ 9 ⎥⎦ ⎢⎣− 7⎥⎦
Calcule a resposta x (t ) (para u(t)=0).
31. Considere os sistemas:
⎡ − 9 1 0⎤
⎡ 2⎤
⎡ 2⎤
⎪⎧ x& = Ax + Bi u
⎨
⎢− 26 0 1⎥ , B = ⎢5⎥ , B = ⎢4⎥
=
A
⎪⎩ y = Ci x
2
⎢
⎢ ⎥
⎥ 1 ⎢ ⎥
⎢
⎢
⎢⎣0⎥⎦
⎥
⎥
−
24
0
0
0
i = 1,2
⎣
⎣ ⎦
⎦
C1 = [1 2 − 1] , C2 = [4 2 − 2]
a) Calcule os valores próprios e vectores próprios e faça a representação diagonal. Esboce o diagrama de blocos.
b) Calcule a função de transferência (para i = 1,2 ).
c) Estude a controlabilidade e a observabilidade.
⎡1⎤ ⎡1⎤ ⎡10 ⎤
⎡1⎤
⎥
⎢
d) Determine a resposta do sistema ( i = 1 ) para a condição inicial: x (0) = 5⎢ 7 ⎥ + 2 ⎢⎢6⎥⎥ + 3⎢⎢5⎥⎥ = ⎢⎢62⎥⎥ .
⎢⎣8⎥⎦ ⎢⎣6⎥⎦ ⎢⎣94⎥⎦
⎢⎣12⎥⎦
32. Considere um sistema representado no espaço dos estados e o correspondente diagrama de blocos da figura.
a) Determine o modelo na forma
x1
+
2
1
x& = Ax + Bu , y = Cx, com x = [x1 x 2 x 3 ]T .
∫
+
b) Determine a sua função de transferência
Y(s)/U(s).
−1
u
∫
x2
+
3
+
y
c) Analise a estabilidade e a controlabilidade deste
sistema.
+
+
−2
2
+
∫
x3
4
+
+1
13
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
33. Considere um sistema representado no espaço dos estados e o correspondente diagrama de blocos da figura.
1
+
x1
∫
1
+
−1
u
+
x2
∫
2
+
y
+
−2
2
+
x3
∫
+
−3
a) Determine o modelo na forma x& (t ) = Ax(t ) + Bu(t ) , y(t) = Cx(t), com x(t) = [x1 x2 x3]T.
b) Analise a estabilidade, a controlabilidade e a observabilidade deste sistema.
c) Determine a sua função de transferência Y(s)/U(s).
d) Determine a resposta y(t) para uma entrada em degrau unitário u(t), t ≥ 0. Considere as condições iniciais
nulas.
34. Considere o sistema descrito por &y& + 6.y& + 5. y = 2.u
a) Para este sistema estabeleça uma representação no espaço de estados na forma canónica controlável.
b) Obtenha Φ(t) = eA.t, a matriz de transição de estados nos tempos.
Y (s )
c) Determine a sua função de transferência
.
U (s )
´
35. Considere o sistema descrito por
Y (s )
2.(s + 2 )
=
U (s ) (s + 1)(s + 3)
a) Estabeleça uma representação no espaço de estados na forma canónica observável, para este sistema.
b) Recorrendo às matrizes Q e R indique se a representação do sistema é controlável e se é observável.
c) Represente o sistema na forma diagonal.
36. Considere o circuito representado na figura seguinte:
R
vi
+
-
v1
C
L
i
v2
C
R
a) Obtenha a sua representação no espaço de estados, considerando:
x1 = v1 , x 2 = v 2 , x 3 = i , y = v 2 e u = v i .
14
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
b) Obtenha a Função de Transferência V2(s)/ Vi(s) a partir da representação no espaço de estados, tomando 1/RC
= 3, 1/C = 1 e 1/L = 2 (Ver Nota).
c) Represente o sistema na forma diagonal e esboce o correspondente diagrama de blocos (Ver Nota).
Nota: Caso não tenha resolvido a alínea 2.a) considere:
⎡ − 6 0 − 2⎤
⎡6 ⎤
⎧x& = A x + B u
⎢
⎥
onde A = ⎢ 0 − 6 2 ⎥, B = ⎢⎢0⎥⎥, C = [0 2 0] .
⎨
⎩y = C x
⎢⎣ 1 − 1 0 ⎥⎦
⎢⎣0⎥⎦
37. Considere o circuito representado na figura.
a) Determine uma representação no espaço de estados com sentido físico com R=10, L1 = 1 e L2 = 2.
At
b) Calcule e .
c) Determine a função de transferência do sistema.
d) Analise a Controlabilidade e Observabilidade.
38. Considere um sistema representado na figura.
L1
R1
+
+
R2
i1
u
L3
−
C2
v2
−
y
R3
i3
Determine o modelo na forma x& = Ax + Bu , y = Cx.
39. Considere um sistema representado na figura.
L1
R1
+
i1
C1
v1
u
R2
L2
y
C2
−
v2
+
i2
−
Determine o modelo na forma x& = Ax + Bu , y = Cx.
15
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
40. Considere o sistema de controlo de velocidade de motor DC através da armadura representado na figura
Θ(s )
ki
=
. Sabendo que R = 8 Ω,
(eb = kb dθ/dt e T = ki i) com função de transferência
V (s ) s (sL + R )(sJ + B ) + skb ki
L = 0.8 H, J = 1 kgm2, B = 1 Nmrad−1s, ki = 0.5 NmA−1 e kb = 0.5 Vrad−1s determine:
L
+
v
−
R
+
eb
−
i
J
T, θ
B
a) A representação do sistema no espaço dos estados, na forma canónica observável
b) O diagrama de blocos da representação da alínea anterior
c) A controlabilidade e a observabilidade recorrendo às matrizes Q e R.
41. Considere o circuito representado na figura seguinte:
qi
h1
q1
A1
R1
h2
A2
R2
qo
a) Considerando que um circuito hidráulico, pode ser descrito pelas seguintes equações de estado (supondo o
fluxo laminar):
h
⎧
⎪q saída = R
⎨ dh
⎪A ⋅
= q entrada − q saída
⎩ dt
obtenha a sua representação no espaço de estados, considerando:
x1 = h1 , x 2 = h2 , y = q o e u = q i .
b) Obtenha a Função de Transferência Qo(s)/Qi(s) a partir da representação no espaço de estados, tomando R1 =
1/2, R2 = 1, A1 = 1, A2 = 2 (Ver Nota).
c) Recorrendo às matrizes Q e R indique se a representação do sistema é controlável e se é observável (ver
Nota).
d) Represente o sistema na forma diagonal (ver Nota).
Nota: Caso não tenha resolvido a alínea a) considere:
⎡ − 4 0⎤
⎡2⎤
⎧x& = A x + B u
onde A = ⎢
⎨
⎥, B = ⎢0⎥, C = [0 2]
2
1
=
y
C
x
⎣
⎦
⎣ ⎦
⎩
16
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados
42. Considere o circuito da figura, com entrada u(t) e saída y(t).
R1
+
+
R2
u(t)
vC
−
L
y(t)
C
iL
R3
−
Apresente uma representação em espaço de estados deste sistema, adoptando as variáveis com “sentido físico”
T
x = [v C i L ]T e x& = v&C i&L . Identifique claramente as matrizes da representação usando a convenção
adoptada nesta disciplina.
[
]
17
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
Soluções
1.
1. a)
Av = λ v ⇔ ( λ I − A ) v = 0
λI − A =
λ +6 −4
= λ2 + 6λ + 8 = (λ + 2)(λ + 4)
λ
2
⎧ λ = −2
Valores próprios ⎨ 1
⎩λ2 = −4
Vectores próprios:
• Para λ1 = −2 vem:
•
⎡1⎤
4 x1 − 4 x2 = 0 ⇔ x1 = x2 ⇒ v1 = ⎢ ⎥
⎣1⎦
Para λ2 = −4 vem:
⎡2⎤
2 x1 − 4 x2 = 0 ⇔ x1 = 2 x2 ⇒ v2 = ⎢ ⎥
⎣1 ⎦
1. b)
(1,1)
⎡ − 6 4⎤ ⎡1⎤ ⎡− 2⎤
⎡1⎤
⎢− 2 0⎥ ⎢1⎥ = ⎢− 2⎥ = −2⎢1⎥ = λ1v1
⎣
⎦⎣ ⎦ ⎣ ⎦
⎣⎦
(-2,-2)
(1,2)
⎡ − 6 4 ⎤ ⎡1 ⎤ ⎡ 2 ⎤
⎢ − 2 0 ⎥ ⎢ 2⎥ = ⎢ − 2⎥
⎣
⎦⎣ ⎦ ⎣ ⎦
(2,-2)
(2,1)
⎡ − 6 4 ⎤ ⎡ 2⎤ ⎡ − 8 ⎤
⎡2⎤
⎢ − 2 0 ⎥ ⎢ 1 ⎥ = ⎢ − 4 ⎥ = − 4 ⎢1 ⎥ = λ 2 v 2
⎣
⎦⎣ ⎦ ⎣ ⎦
⎣ ⎦
(-8,-4)
2. a) A
2. b) B
3. B
4. C
1
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
5. A
6. B
7. B
⎡− 3 − 1⎤
A=⎢
0 ⎥⎦
⎣2
⎡0⎤
B=⎢ ⎥
⎣ 2⎦
C = [− 1 0]
D = [0]
Solução 1
Y (s)
= C( sI − A) −1 B + D
U ( s)
⎡ a1
⎢a
⎣ 2
b1 ⎤
b2 ⎥⎦
−1
=
1
⎡a
det ⎢ 1
⎣a 2
⎡ b2
⎢
b1 ⎤ ⎣− a 2
b2 ⎥⎦
− b1 ⎤
⎡ b2
1
=
⎥
a1 ⎦ a1b2 − a 2 b1 ⎢⎣− a 2
− b1 ⎤
a1 ⎥⎦
−1
⎡ s + 3 1⎤
⎡s −1 ⎤
1
( sI − A) −1 = ⎢
⎥ = 2
⎢
⎥
−
s
2
s + 3s + 2 ⎣2 s + 3⎦
⎣
⎦
s − 1 ⎤ ⎡0⎤
0
[− 1 0]⎡⎢
[− s 1]⎡⎢ ⎤⎥
⎥
⎢
⎥
Y (s)
2
⎣2 s + 3⎦ ⎣2⎦
⎣ 2⎦
=
= 2
=
2
U ( s)
s + 3s + 2
s + 3s + 2 ( s + 1)( s + 2)
Solução 2 (sem cálculo da inversa)
⎡s + 3 1 0 ⎤
⎢
⎥
⎡− 2 s ⎤
⎡− 2 − 2⎤
⎡ s − 2⎤
⎡ sI − A − B ⎤ det ⎢ − 2 s − 2⎥
det ⎢
( s + 3) det ⎢
⎥ − 1 det ⎢ − 1 0 ⎥ + 0 det ⎢ − 1 0⎥
⎥
⎢
⎥
1
0
0
−
C
D
0
0
Y ( s)
⎦
⎣
⎦
⎣
⎦
⎣
⎣
⎦
⎦
⎣
=
=
=
2
det[sI − A ]
U ( s)
3
1
+
s
⎤
⎡
s + 3s + 2
det ⎢
⎥
2
−
s
⎦
⎣
Y ( s ) ( s + 3) ⋅ 0 − 1 ⋅ (−2) + 0 ⋅ s
2
=
=
( s + 1)( s + 2)
( s + 1)( s + 2)
U ( s)
8. a) C
8. b) C
1
− 2⎤
⎡s + 3
⎢
⎥
⎡ − 1 s + 9⎤
⎡− 1 − 3⎤
⎡ s + 9 − 3⎤
⎡ sI − A − B ⎤ det ⎢ − 1 s + 9 − 3⎥
det ⎢
( s + 3) det ⎢
− 2 det ⎢
− 1 det ⎢
⎥
⎥
⎥
⎢
⎥
7
0 ⎦
D⎦
0⎦
0⎦
7 ⎥⎦
Y (s)
⎣5
⎣5
⎣ 7
⎣ 5
⎣ C
=
=
=
1 ⎤
U (s)
det[sI − A ]
⎡s + 3
s 2 + 12 s + 28
det ⎢
⎥
⎣ − 1 s + 9⎦
31s + 152
Y ( s ) ( s + 3) ⋅ 21 − 1 ⋅ 15 − 2 ⋅ (−5s − 52)
=
= 2
2
U (s)
s + 12s + 28
s + 12 s + 28
2
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
9.
9. a)
Resolução através do Teorema de Cayley-Hamilton:
⎧ λ = −2
Valores próprios ⎨ 1
⎩λ2 = −4
⎧ α 0 = 2e −2t − e −4t
⎧⎪e − 2t = α 0 + α1 (−2)
⎪
⇔
1 − 2t
⎨ − 4t
⎨
− 4t
⎪⎩e = α 0 + α1 (−4)
⎪⎩α1 = 2 e − e
(
(
)
)
(
⎡1 0 ⎤ 1 − 2 t
− 4t
logo e At = α 0 I + α1A = 2e − 2t − e − 4t ⎢
⎥+ e −e
0
1
2
⎣
⎦
)⎡⎢−− 62
⎣
4⎤ ⎡− e −2t + 2e −4t
=⎢
0⎥⎦ ⎣⎢ − e − 2t + e − 4t
2e −2t − 2e −4t ⎤
⎥
2e − 2t − e − 4t ⎦⎥
Resolução através da Transformada de Laplace:
(sI − A )
−1
⎡ s + 6 − 4⎤
=⎢
s ⎥⎦
⎣ 2
{
−1
⎡
4 ⎤ ⎢−
⎡ s
1
=
⎢
⎥=⎢
( s + 2)( s + 4) ⎣− 2 s + 6⎦ ⎢−
⎣
}
⎡− e −2t + 2e −4t
e At = L−1 (sI − A )−1 = ⎢ − 2t
− 4t
⎢⎣ − e + e
1
2
+
s+2 s+4
1
1
+
s+2 s+4
2
−
s+2
2
−
s+2
2 ⎤
s + 4⎥
1 ⎥
⎥
s + 4⎦
2e −2t − 2e −4t ⎤
⎥
2e − 2t − e − 4t ⎥⎦
9. b)
⎡
⎢−
Y (s)
−1
= C(sI − A ) B = [1 0]⎢
U (s)
⎢−
⎣
1
2
+
s+2 s+4
1
1
+
s+2 s+4
2
2 ⎤
−
4
s + 2 s + 4 ⎥ ⎡0 ⎤ = 2 − 2 =
2
1 ⎥ ⎢⎣1⎥⎦ s + 2 s + 4 ( s + 2)( s + 4)
⎥
−
s + 2 s + 4⎦
9. c)
6
-
x&1
x1
+
⎧( s + 6) X 1 = 4 X 2
⎨
⎩ U − 2 X 1 = sX 2
X1 = Y
4
sX 1 = −6 X 1 + 4 X 2
y
↓
4
(U − 2 X 1 )
s
⇔ [s ( s + 6) + 8]X 1 = 4U
( s + 6) X 1 =
2
⇔
-
u
x& 2
X1 Y
4
= =
U U ( s + 2)( s + 4)
x2
+
sX 2 = U − 2 X 1
3
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
10. C
variáveis auxiliares:
v1 = Lx&
v1
L
= x+
x&
R2
R2
Um elemento armazenador de energia (L).
⎛R
⎞
R
u = R1i1 + v1 ⇔ u = R1 x + 1 Lx& + Lx& ⇔ ⎜⎜ 1 + 1⎟⎟ Lx& = − R1 x + u
R2
R
⎝ 2
⎠
i1 = x +
11.a) C
Dois elementos armazenadores de energia (L e C).
i = Cx&1 + x 2
x1 = Lx& 2 + Rx 2
y = Rx 2
11.b) A
⎡ sI − A − B ⎤
det ⎢
D ⎥⎦
Y (s)
⎣ C
=
det[sI − A ]
U ( s)
1
1⎤
⎡
− ⎥
⎢ s
C
C
⎥
⎢ 1
R
⎢
det −
0 ⎥
s+
R⎤
⎡ 1
L
⎥
⎢ L
1
0 ⎥ − det ⎢− L s + L ⎥
R
⎢ 0
R
C
⎢ 0
⎥
⎥
⎢
R
⎣
⎦
⎦
⎣
LC
=
=
=
1
1
R
1 ⎤
⎡
2
s + s+
LCs 2 + RCs + 1
⎢ s
⎥
L
LC
LC
C
det ⎢
1
R⎥
⎢−
s+ ⎥
L⎦
⎣ L
(
)
12.a) B
v1 = x1 + Lx& 2
v1
x + Lx& 2
= 1
R 2 + R3
R 2 + R3
Dois elementos armazenadores de energia (L e C).
x2 = Cx&1
i2 =
R1
R1
x1 +
Lx& 2 + R1 x2 + x1 + Lx& 2
R 2 + R3
R 2 + R3
R1 ⎞
R1 ⎞
⎛
⎛
⇔ ⎜1 +
⎟ Lx& 2 = −⎜1 +
⎟ x1 + u
R 2 + R3 ⎠
R 2 + R3 ⎠
⎝
⎝
u = R1 (i2 + x2 ) + v1 ⇔ u =
4
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
12.b) D
⎡ G1 ( s ) ⎤
−1
⎢G ( s )⎥ = C( sI − A) B + D
⎣ 2 ⎦
⎡ a1
⎢a
⎣ 2
b1 ⎤
b2 ⎥⎦
−1
=
1
⎡a
det ⎢ 1
⎣a 2
⎡ b2
⎢
b1 ⎤ ⎣− a 2
⎥
b2 ⎦
− b1 ⎤
⎡ b2
1
=
⎥
a1 ⎦ a1b2 − a 2 b1 ⎢⎣− a 2
− b1 ⎤
a1 ⎥⎦
R1 (R 2 + R3 )
⎡
s+
⎢
1
( sI − A) −1
=
⎢ L(R1 + R 2 + R3 )
1
⎛
⎞
R
R
R
(
)
+
1
⎢
1
2
3
−
⎟s +
s 2 + ⎜⎜
⎢
⎟
L
⎝ L(R1 + R 2 + R3 ) ⎠ LC ⎣
R1 (R 2 + R3 )
⎡
1⎤
⎢ s + L (R + R + R ) C ⎥
(R1 + R2 + R3 )LC
1
2
3
=
⎥
⎢
1
LCs 2 + R1 (R 2 + R3 )Cs + (R1 + R 2 + R3 ) ⎢
s⎥
−
⎥⎦
⎢⎣
L
⎡
⎢s
=⎢
⎢1
⎢⎣ L
1
⎤
⎥
C
R1 (R 2 + R3 ) ⎥
⎥
s+
L(R1 + R 2 + R3 ) ⎥⎦
−1
−
1⎤
C ⎥⎥ =
s⎥
⎥⎦
R1 (R 2 + R3 )
⎡
1⎤
0
0
⎤
⎤ ⎢s +
⎡1
⎥⎡
R 2 + R3
R1 R 2
⎥+D=
⎥ ⎢ L(R1 + R 2 + R3 ) C ⎥ ⎢
⎢
⎢ L(R + R + R ) ⎥
1
⎢0 − R + R + R ⎥ ⎢
⎥
s ⎣
−
1
2
3⎦
1
2
3 ⎦
⎣
⎥⎦
L
⎣⎢
R1 (R 2 + R3 )
⎤
⎡
1
0
⎤
⎥⎡
(R1 + R 2 + R3 )LC ⎢⎢s + L(R1 + R2 + R3 )
C
R 2 + R3
⎥+D=
⎥⎢
=
R1 R 2
R1 R 2
⎥
⎢
Δ
⎢
s ⎥ ⎣ L(R1 + R 2 + R3 ) ⎦
−
⎥
⎢ (R + R + R )L
R
R
R
+
+
1
2
3
1
2
3 ⎦
⎣
⎡ G1 ( s ) ⎤ (R1 + R 2 + R3 )LC
⎢G ( s )⎥ =
Δ
⎣ 2 ⎦
=
R 2 + R3
⎤
1
⎥
⎤
⎡
R1 R 2
⎥ + D = (R 2 + R 3 ) ⎢
⎥+D
⎢− ( R 2 + R3 ) R1 R 2 ⎥
⎢− R + R + R C ⎥
Δ
2
3
⎦
⎣ 1
⎢ (R + R + R ) 2 L ⎥
1
2
3
⎦
⎣
⎡
(R1 + R 2 + R3 )LC ⎢⎢ (R1 + R 2 + R3 )LC
Δ
Obrigatoriamente outra solução. A primeira linha indica que só poderia ser A ou D. Para o caso da solução A, a
segunda linha não se verifica, uma vez que D é diferente de zero nessa linha.
0
⎤
0
⎤ 1⎡
⎡
R2
⎥ = ⎢ R2 LCs 2 + R1 (R2 + R3 )Cs + (R1 + R2 + R3 ) ⎥ =
D=⎢
⎥
⎢R + R + R ⎥ Δ ⎢
R1 + R2 + R3
2
3⎦
⎣ 1
⎦
⎣
0
⎤
⎡
⎥
⎢
⎛
⎞
R
R
R
+
+
LC
2
(
)
R + R3 R ⎜
2
3⎟
s + R1Cs + 1
⎢ 2⎜
= 2
⎟⎥
R
R
R
R
+
+
3
2
3
Δ
⎠⎥
⎢ ⎝ 2
⎥
⎢
R
R
R
+
+
1
2
3
⎦
⎣
(
)
1
⎤
⎡
⎢
⎛
⎡ G1 ( s ) ⎤ R2 + R3 ⎢ R ⎜ LC s 2 + R Cs + ⎛⎜ R1 + R2 + R3 − R C ⎞⎟ ⎞⎟ ⎥⎥
2⎜
1
1 ⎟⎟
⎜ R +R
⎢G ( s )⎥ =
2
3
Δ ⎢ ⎝ R2 + R3
⎝
⎠⎠ ⎥
⎣ 2 ⎦
⎥
⎢
R
R
R
+
+
1
2
3
⎦
⎣
5
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
13.
⎧
⎡ R1
0
⎪
⎢−
⎪⎡ x&1 ⎤ ⎢ L1
R
⎪⎢ x& ⎥ = ⎢ 0
− 2
⎪⎢ 2 ⎥ ⎢
L2
⎪⎪⎢⎣ x&3 ⎥⎦ ⎢
1
1
⎢
⎨
−
C
⎪
⎣⎢ C
⎪
⎡ x1 ⎤
⎪
⎪ y = [0 R2 0]⎢ x2 ⎥
⎢ ⎥
⎪
⎢⎣ x3 ⎥⎦
⎪⎩
L1
R1
R1
1
1
⎧&
⎪ x1 = − L x1 − L x3 + L u
1
1
1
⎧u = R1 x1 + L1 x&1 + x3
⎪
R2
1
⎪
⎪
&
&
x
=
L
x
+
R
x
⇔
x
=
−
x
+
x
⎨ 3
⎨
2 2
2 2
2
2
3
L2
L2
⎪ x = Cx& + x
⎪
1
3
2
⎩
1
1
⎪
x&3 = x1 − x2
⎪⎩
C
C
y = R2 x2
L2
x2
x1
+
u(t)
-
C
x3
R2
y(t)
1⎤
⎡1⎤
L1 ⎥ ⎡ x ⎤ ⎢ ⎥
⎥ 1
L
1 ⎥⎢ ⎥ ⎢ 1 ⎥
+
x
2
⎢ 0 ⎥u
L2 ⎥ ⎢ ⎥ ⎢ ⎥
0
⎥ ⎢⎣ x3 ⎥⎦
⎢ ⎥
0 ⎥
⎣
⎦
⎥⎦
−
14.
di1
dt
di
(14.2) v2 = L2 2 + v1
dt
di
(14.3) v2 = L3 3
dt
dv1
(14.4) i2 = C1
+ i1
dt
dv
(14.5) i = i3 + C2 2 + i2
dt
di1
y = L1
= v1
dt
(14.1) v1 = L1
Das equações 14.1, 14.2 e 14.3 resulta:
di
di
di
L3 3 = L2 2 + L1 1 ⇔ L3 i3 = L2 i 2 + L1i1 + k , onde k depende das condições iniciais.
dt
dt
dt
Se i1 (0) = i2 (0) = i3 (0) = 0 , i.e. K=0, vem:
L
L
(14.6) i3 = 2 i2 + 1 i1 → i3 é linearmente dependente de i1 e i2.
L3
L3
v2=x2
Logo:
(14.1) x1 = L1 x&3
(14.2) x2 = L2 x& 4 + x1
(14.4) x4 = C1 x&1 + x3
L3
v1=x1
i2=x4
i3
i
L2
C2
i1=x3
C1
L1
6
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
Das equações 14.5 e 14.6 vem:
L
L
C2 x& 2 = − 1 i1 − 2 i2 − i2 + i
L3
L3
(14.7) x& 2 = −
L + L3
1
L1
x4 +
u
x3 − 2
L3
C2
L3C2
Resultando a representação por variáveis de estado:
1
1
⎡
⎤
0
−
⎢ 0
⎥
C1
C1
⎢
⎥
(14.4) ⎡ x&1 ⎤
L + L3 ⎥ ⎡ x1 ⎤ ⎡ 10 ⎤
L
0 − 1
− 2
⎢ ⎥ ⎢ ⎥
⎢ x& ⎥ ⎢ 0
(14.7) ⎢ 2 ⎥ ⎢
L3C2
L3C2 ⎥ ⎢ x2 ⎥ ⎢ C ⎥
=⎢
⎥ ⎢ ⎥ + ⎢ 2 ⎥u
(14.1) ⎢ x&3 ⎥ ⎢ 1
⎥ ⎢ x3 ⎥ ⎢ 0 ⎥
0
0
0
⎢ ⎥
L
⎥ ⎣ x4 ⎦ ⎢ 0 ⎥
(14.2) ⎣ x& 4 ⎦ ⎢ 1
⎣ ⎦
⎢ 1
⎥
1
0
0
⎢−
⎥
⎣ L2 L2
⎦
⎡ x1 ⎤
⎢x ⎥
y = [1 0 0 0]⎢ 2 ⎥
⎢ x3 ⎥
⎢ ⎥
⎣ x4 ⎦
15. D
{
e At = L−1 (sI − A )−1
}
1
⎡
0 ⎤ ⎢
⎡s + 2
1
s+3
=
(sI − A )
⎥=⎢
⎢
( s + 3)( s + 2) ⎣ − 1 s + 3⎦ ⎢ 1 − 1
⎢⎣ s + 3 s + 2
⎡
⎤
⎧ 1 ⎫
L−1 ⎨
L−1{0} ⎥
⎬
⎢
− 3t
⎡
0 ⎤
⎩ s + 3⎭
⎥=⎢ e
e At = ⎢
⎥
−
3
t
−
2
t
−
1 ⎫ −1 ⎧ 1 ⎫⎥ ⎣⎢e − e
⎢ −1 ⎧ 1
e 2t ⎦⎥
−
L
L
⎨
⎬
⎨
⎬
⎢
⎥
⎩ s + 2 ⎭⎦
⎣ ⎩s + 3 s + 2⎭
−1
0 ⎤
⎡s + 3
=⎢
s
1
2⎥⎦
+
⎣
−1
⎤
0 ⎥
1 ⎥
⎥
s + 2 ⎥⎦
16. a) B
16. b) B
17. B
Pela análise das equações do sistema (forma canónica controlável) conclui-se que o seu polinómio característico
é s 3 + 5s 2 + 11s + 15 , com raízes (valores próprios de A) λ = −1 + j2, λ = −1 − j2 e λ = −3. Uma representação
diagonal deste sistema terá que ter uma matriz de sistema com uma diagonal consistindo do valor -3 e do
⎡ −1 2 ⎤
bloco ⎢
⎥
⎣− 2 − 1⎦
Para uma resolução por extenso seria necessário calcular os vectores próprios para definir a matriz de mudança
de
base.
Um
possível
conjunto
de
v 2 = [1 − 1 − 2 j − 3 + 4 j ]T e v 3 = [1 − 3 9]T .
vectores
próprios
seria
v 1 = [1 − 1 + 2 j − 3 − 4 j ]T ,
7
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
18. a) A
18. b) D
Y (s)
1
12
=3
4=
U ( s)
s+2
s+2
19.
Y ( s )(s 2 + 3s + 2) = U ( s )(s + 3)
&y& + 3 y& + 2 y = 0u&& + 1u& + 3u
a1
a2 b0 b1 b2
19. a) F.C.C.
⎧⎡ x&1 ⎤ ⎡ 0
1 ⎤ ⎡ x1 ⎤ ⎡0⎤
⎪⎢ ⎥ = ⎢
⎥ ⎢ ⎥ + ⎢ ⎥u
&
⎪⎣ x2 ⎦ ⎣− a2 − a1 ⎦ ⎣ x2 ⎦ ⎣1⎦
⎨
T
⎪ y = ⎡b2 − a2b0 ⎤ ⎡ x1 ⎤ + b u
0
⎢ b − a b ⎥ ⎢x ⎥
⎪
1 0 ⎦ ⎣ 2⎦
⎣ 1
⎩
⎧⎡ x&1 ⎤ ⎡ 0
1 ⎤ ⎡ x1 ⎤ ⎡0⎤
⎧⎡ x&1 ⎤ ⎡ 0
1 ⎤ ⎡ x1 ⎤ ⎡0⎤
+ ⎢ ⎥u
=⎢
⎪⎢ ⎥ = ⎢
⎢
⎥
⎥
⎪
⎢
⎥
⎥ ⎢ ⎥ + ⎢ ⎥u
&
⎪⎣ x2 ⎦ ⎣− 2 − 3⎦ ⎣ x2 ⎦ ⎣1⎦
⎪⎣ x& 2 ⎦ ⎣− 2 − 3⎦ ⎣ x2 ⎦ ⎣1⎦
⇒ ⎨
⇔⎨
T
⎡x ⎤
⎪ y = ⎡3 − 2.0⎤ ⎡ x1 ⎤ + 0.u
⎪
y = [3 1]⎢ 1 ⎥
⎢
⎥
⎢
⎥
⎪
⎪⎩
⎣ x2 ⎦
⎣1 − 3.0 ⎦ ⎣ x2 ⎦
⎩
+
+
b0=0
x& 2
u +
+
+
b1=1
b2=3
x2
x&1
y
x1
-
a2=2
a1=3
+
+
19. b) F.C.O.
⎧⎡ x&1 ⎤ ⎡ − a1
⎪⎢ ⎥ = ⎢
⎪⎣ x& 2 ⎦ ⎣− a2
⎨
⎪
y = [1
⎪⎩
⎧⎡ x&1 ⎤ ⎡ − 3 1⎤ ⎡ x1 ⎤ ⎡1⎤
⎧⎡ x&1 ⎤ ⎡ − 3 1⎤ ⎡ x1 ⎤ ⎡1 − 3.0 ⎤
1⎤ ⎡ x1 ⎤ ⎡ b1 − a1b0 ⎤
u
+⎢
+⎢
u
⎪⎢ ⎥ = ⎢
⎪⎢ ⎥ = ⎢
⎥
⎥
⎢
⎥
⎥
⎢
⎥ ⎢ ⎥ + ⎢ ⎥u
⎥
⎥
0⎦ ⎣ x2 ⎦ ⎣b2 − a2b0 ⎦
⎪⎣ x& 2 ⎦ ⎣− 2 0⎦ ⎣ x2 ⎦ ⎣3⎦
⎪⎣ x& 2 ⎦ ⎣− 2 0⎦ ⎣ x2 ⎦ ⎣3 − 2.0⎦
⇔⎨
⇒ ⎨
⎡x ⎤
⎡x ⎤
⎡x ⎤
⎪
⎪
y = [1 0]⎢ 1 ⎥ + 0.u
y = [1 0]⎢ 1 ⎥
0]⎢ 1 ⎥ + b0u
⎪⎩
⎪⎩
⎣ x2 ⎦
⎣ x2 ⎦
⎣ x2 ⎦
8
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
u
b2=3
+
-
a2=2
b1=1
x& 2
x2
+
+
b0=0
x&1
x1
+
+
y
-
a1=3
20.
20. a) B
20. b) C
20. c) A
20. d) D
A entrada não afecta x2 (controlabilidade). A saída não é afectada por x1 (observabilidade).
21.
(representação diagonal)
21. a) A
21. b) A
Representação diagonal, sem elementos da diagonal ou blocos de Jordan repetidos. Como u afecta todas as
últimas linhas de cada bloco, o sistema é controlável. Pelo método geral:
Q = [B AB]
⎡ − 3 2 ⎤ ⎡ 1 ⎤ ⎡ − 9⎤
AB = ⎢
⎥⎢ ⎥ = ⎢ ⎥
⎣− 2 − 3⎦ ⎣− 3⎦ ⎣− 7⎦
⎡ 1 − 9⎤
Q=⎢
⎥
⎣− 3 − 7⎦
det(Q) = −7 − (−9)(−3) ≠ 0
22.
22. a) C
22. b) C
(ver justificação da 16.b)
Q = [B AB]
⎡ − 2 0 ⎤ ⎡ 1 ⎤ ⎡− 2⎤
AB = ⎢
⎥⎢ ⎥ = ⎢ ⎥
⎣ 0 − 4⎦ ⎣− 3⎦ ⎣ 12 ⎦
⎡ 1 − 2⎤
Q=⎢
⎥
⎣− 3 12 ⎦
det(Q) = 12 − (−2)(−3) ≠ 0
9
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
23.
23. a) A
Q = [B AB]
⎡1 − 1⎤ ⎡ 1 ⎤ ⎡ 4 ⎤
AB = ⎢
⎥⎢ ⎥ = ⎢ ⎥
⎣6 − 4⎦ ⎣− 3⎦ ⎣18⎦
⎡ 1 4⎤
Q=⎢
⎥
⎣− 3 18⎦
det(Q) = 18 − (4)(−3) ≠ 0
23. b) B
⎡C⎤
R=⎢ ⎥
⎣CA ⎦
⎡1 − 1 ⎤
CA = [− 2 1]⎢
⎥ = [4 − 2]
⎣6 − 4 ⎦
⎡− 2 1 ⎤
R=⎢
⎥
⎣ 4 − 2⎦
det(R ) = 0
23. c)
1
− 1⎤
⎡s − 1
⎢ − 6 s + 4 − 3⎥
det
s
−
−
− 1⎤
I
A
B
⎡
⎤
⎡ s − 1 − 1⎤
⎢
⎥ − 2 det ⎡ 1
det ⎢
− 1 det ⎢
⎥
⎢
⎥
⎥
⎢⎣ − 2
1
0 ⎥⎦
D⎦
Y (s)
⎣ C
⎣ s + 4 − 3⎦
⎣ − 6 − 3⎦
=
=
=
U ( s)
det[sI − A ]
1 ⎤
⎡s − 1
s 2 + 3s + 2
det ⎢
⎥
⎣ − 6 s + 4⎦
Y ( s ) 6 − ( s + 4) ⋅ 2 + ( s − 1) ⋅ 3 + 6
s +1
1
=
=
=
U ( s)
( s + 1)( s + 2)
( s + 1)( s + 2) s + 1
Cancelamento de pólos!
24.
24. a) B
Representação diagonal, de um sistema com n pólos diferentes, onde a entrada u não afecta directamente todas as variáveis de
estado.
24. b) B
Representação diagonal, de um sistema com n pólos diferentes, onde a saída y não é influenciada por todas as variáveis de
estado.
24. c) A
Uma vez que estamos perante uma representação diagonal, vê-se imediatamente pela matriz do sistema que todos os pólos são
negativos.
24. d) A
⎧Y = 2 X 1
⎪
3
⎨
⎪sX 1 = −4 X 1 + 3U ⇔ X 1 = s + 4 U
⎩
6
Y=
U
s+4
10
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
25.
25. a) A
⎧Y = X 1
⎪
⎨
1
⎪sX 1 = 2 X 1 + U ⇔ X 1 = s − 2 U
⎩
1
Y=
U
s−2
Cancelamento de pólos!
25. b) B
Pode concluir-se, mesmo sem a análise da matriz de observabilidade, que o sistema não é observável pois a saída
só depende directamente da variável x1, que por sua vez não é afectada por nenhuma das outras variáveis. Logo
não seria possível estimar o valor das outras variáveis a partir da saída.
Controlabilidade:
Q = B AB A 2 B
[
]
0⎤ ⎡1⎤ ⎡ 2 ⎤
⎡ 2 0
⎢
AB = ⎢ 1 3
0⎥⎥ ⎢⎢0⎥⎥ = ⎢⎢ 1 ⎥⎥
⎢⎣− 1 2 − 5⎥⎦ ⎢⎣0⎥⎦ ⎢⎣− 1⎥⎦
0⎤ ⎡ 2 ⎤ ⎡ 4⎤
⎡ 2 0
⎢
2
A B = AAB = ⎢ 1 3
0⎥⎥ ⎢⎢ 1 ⎥⎥ = ⎢⎢5⎥⎥
⎣⎢− 1 2 − 5⎦⎥ ⎣⎢− 1⎦⎥ ⎣⎢5⎦⎥
⎡1 2 4 ⎤
Q = ⎢⎢0 1 5⎥⎥
⎢⎣0 − 1 5⎥⎦
det(Q) = 1.(1 ⋅ 5 − 5 ⋅ (−1) ) ≠ 0
26.
26. a)
Φ (t ) = e At = L−1 (sI − A )−1
{
}
⎡s − 6 ⎤
sI − A = ⎢
⎥
⎣1 s + 5⎦
sI − A = s 2 + 5s + 6 = ( s + 2)( s + 3)
Φ ( s ) = (sI − A )
−1
→
⎡ 3
⎡ s + 5 6⎤ ⎢ s + 2 −
1
=
⎢
⎥=⎢
( s + 2)( s + 3) ⎣ − 1 s ⎦ ⎢ − 1 +
⎣s + 2
⎡3e − 2t − 2e −3t
Φ (t ) = ⎢ −2t
−3t
⎢⎣ − e + e
2
s+3
1
s+3
6
−
s+2
−2
+
s+2
6 ⎤
s + 3⎥
3 ⎥
⎥
s + 3⎦
6e −2t − 6e −3t ⎤
⎥
− 2e − 2t + 3e −3t ⎥⎦
26. b)
X ( s ) = ( s I − A ) − 1 x ( 0) + ( s I − A ) − 1 B U ( s )
1
U (s) =
s
11
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
6
⎡
⎤ ⎡1
3
2 ⎤
−
+
⎢
⎡ s + 5 6 ⎤ ⎡0 ⎤ 1
1
s ( s + 2)( s + 3) ⎥ ⎢ s s + 2 s + 3 ⎥
−1
( sI − A ) B U ( s ) =
. =⎢
⎥=⎢
⎥
1
1
1
( s + 2)( s + 3) ⎢⎣ − 1 s ⎥⎦ ⎢⎣1⎥⎦ s ⎢
⎥ ⎢
−
⎥
⎣⎢ ( s + 2)( s + 3) ⎦⎥ ⎣ s + 2 s + 3 ⎦
⎡3e −2t − 2e −3t
x(t ) = ⎢ − 2t
− 3t
⎣− e + e
6e −2t − 6e −3t ⎤ ⎡ x1 (0) ⎤ ⎡1 − 3e −2t + 2e −3t ⎤
⎥⎢
⎥
⎥+⎢
− 2e − 2t + 3e − 3t ⎦ ⎣ x2 (0)⎦ ⎣ e − 2t − e − 3t ⎦
27.
27. a) B
27. b) B
28.
28. a) B
Temos um pólo (λ1) com multiplicidade algébrica superior a 1 (2) que não está representado por um bloco de
Jordan, logo é conveniente fazer a análise da matriz Q.
[
Q = B AB A 2 B
]
0
0⎤ ⎡ b1 ⎤ ⎡ b1λ 1 ⎤
⎡λ 1
⎢
AB = ⎢ 0 λ 1
0⎥⎥ ⎢⎢− b1 ⎥⎥ = ⎢⎢− b1 λ 1 ⎥⎥
⎢⎣ 0 0 λ 3 ⎥⎦ ⎢⎣ b3 ⎥⎦ ⎢⎣ b3 λ 3 ⎥⎦
0
0⎤ ⎡ b1λ 1 ⎤ ⎡ b1 λ 1 2 ⎤
⎡λ 1
⎥
⎢
A 2 B = AAB = ⎢⎢ 0 λ 1
0⎥⎥ ⎢⎢− b1λ 1 ⎥⎥ = ⎢− b1λ 1 2 ⎥
⎢⎣ 0 0 λ 3 ⎥⎦ ⎢⎣ b3 λ 3 ⎥⎦ ⎢ b3 λ 3 2 ⎥
⎦
⎣
⎡ b1
b1 λ 1
b1λ 1 2 ⎤
⎥
⎢
Q = ⎢− b1 − b1 λ 1 − b1 λ 1 2 ⎥
⎢b
b3 λ 3
b3 λ 3 2 ⎥
⎦
⎣ 3
As duas primeiras linhas da matriz Q são linearmente dependentes logo R(Q)<3. O sistema não é controlável.
28. b) A
29.
29. a) C
29. b) B
⎡ s + 3 1⎤
det (sI − A ) = det ⎢
⎥ = ( s + 1)( s + 2)
⎣ − 2 s⎦
Hipóteses A e C excluídas. Calcular base de vectores próprios T tal que:
ˆ = ⎡− 1 0 ⎤
T −1 AT = A
⎢ 0 − 2⎥
⎣
⎦
T = [v 1
v2 ]
⎡− 1 + 3 1 ⎤ ⎡ v11 ⎤
(−1 ⋅ I − A) v 1 = 0 ⇔ ⎢
⎢ ⎥ ⇔ v12 = −2v11
− 1⎥⎦ ⎣v12 ⎦
⎣ −2
⎡− 2 + 3 1 ⎤ ⎡ v 21 ⎤
(−2 ⋅ I − A) v 1 = 0 ⇔ ⎢
⎢ ⎥ ⇔ v 22 = −v 21
− 2⎥⎦ ⎣v 22 ⎦
⎣ −2
1⎤
⎡1
T=⎢
2
1⎥⎦
−
−
⎣
ˆ = CT e B = T −1 B , verifiquemos primeiro a matriz C antes de calcular a inversa de T.
Uma vez que C
12
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
1⎤
⎡1
ˆ
CT = [2 3]⎢
⎥ = [− 4 − 1] = C
−
−
2
1
⎣
⎦
Finalmente, uma vez que a hipótese B ainda é possível, verifiquemos a matriz B:
det(T) = −1 + 2 = 1
⎡− 1 − 1⎤
T −1 = ⎢
⎥
⎣2 1⎦
⎡− 1 − 1⎤ ⎡− 1⎤ ⎡ 0 ⎤
T −1B = ⎢
⎥ ⎢ ⎥ = ⎢ ⎥ = B̂
⎣ 2 1 ⎦ ⎣ 1 ⎦ ⎣− 1⎦
29. c) C
(
ˆ
ˆ
e At = L−1 ⎧⎨ sI − A
⎩
)
−1 ⎫
⎬
⎭
e At = Te At T −1
ˆ
⎡e − t
ˆ
e At = ⎢
⎣⎢ 0
0 ⎤
⎥
e ⎦⎥
− 2t
1 ⎤ ⎡e − t
⎡1
e At = ⎢
⎥⎢
⎣− 2 − 1⎦ ⎢⎣ 0
0 ⎤ ⎡− 1 − 1⎤ ⎡ e −t
⎥⎢
⎥=⎢
e − 2t ⎥⎦ ⎣ 2 1 ⎦ ⎢⎣− 2e −t
e − 2t ⎤ ⎡− 1 − 1⎤ ⎡− e −t + 2e − 2t
⎥⎢
⎥=⎢
− e − 2t ⎥⎦ ⎣ 2 1 ⎦ ⎢⎣ 2e −t − 2e − 2t
− e −t + e − 2t ⎤
⎥
2e −t − e − 2t ⎥⎦
29. d) A
29. e)
Pela análise da representação diagonal (valores próprios distintos, matriz B com elementos nulos), conclui-se que
o sistema não é controlável. O sistema é observável (valores próprios distintos, matriz C sem elementos nulos).
30.
30. a)
λ
λI − A = 0
−1
0
λ
− 1 = λ3 + 5λ2 + 11λ + 15
15 11 λ + 5
[
]
λI − A = 0 ⇔ (λ2 + 2λ + 5)(λ + 3) = 0 ⇔ (λ + 1) 2 + 22 (λ + 3) = 0
⎧λ = −1 + j 2
Valores próprios ⎨ 1
⎩ λ2 = −3
Vectores próprios:
•
Para λ1 = −1 + j 2 vem:
0 ⎤ ⎡ x1 ⎤ ⎡0⎤
−1
⎡− 1 + j 2
⎡ 1 ⎤
⎢ 0
⎥ ⎢ x ⎥ = ⎢0 ⎥ ⇒ e = ⎢ − 1 + j 2 ⎥
1
2
1
−
+
−
j
1
⎢
⎥⎢ 2 ⎥ ⎢ ⎥
⎢
⎥
⎢⎣ 15
⎢⎣− 3 − j 4⎥⎦
11
4 + j 2⎥⎦ ⎢⎣ x3 ⎥⎦ ⎢⎣0⎥⎦
⎡1 ⎤
⎡ 0 ⎤
e1 = Re(e1 ) + j Im(e1 ) = ⎢⎢ − 1⎥⎥ + j ⎢⎢ 2 ⎥⎥
⎢⎣− 3⎥⎦
⎢⎣− 4⎥⎦
v′
v ′′
13
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
•
Análise de Sistemas no Espaço de Estados (soluções)
Para λ2 = −3 vem:
⎡− 3 − 1 0 ⎤ ⎡ x1 ⎤ ⎡0⎤
⎡1⎤
⎢ 0 − 3 − 1⎥ ⎢ x ⎥ = ⎢0⎥ ⇒ e = ⎢− 3⎥
3
⎢
⎥⎢ 2 ⎥ ⎢ ⎥
⎢ ⎥
⎢⎣ 9 ⎦⎥
⎣⎢ 15 11 2 ⎦⎥ ⎢⎣ x3 ⎦⎥ ⎢⎣0⎦⎥
30. b) Como o sistema tem valores próprios complexos não se adopta uma representação totalmente diagonal de
forma a conseguir um diagrama de blocos somente envolvendo números reais.
⎡1 0 1⎤
⎡3 − 2 − 1⎤
⎢
⎥
1⎢
-1
x = Wd → W = ⎢ − 1 2 − 3⎥ → W = ⎢9 6
1 ⎥⎥
8
⎢− 3 − 4 9 ⎥
⎢⎣5 2
1 ⎥⎦
⎣
⎦
v ′ v ′′ e3
0⎤
⎡ −1 2
~
⎢
-1
Λ = W AW = ⎢− 2 − 1 0 ⎥⎥
⎢⎣ 0
0 − 3⎥⎦
⎡3 − 2 − 1⎤ ⎡0⎤ ⎡− 1 / 8⎤
1⎢
1 ⎥⎥ ⎢⎢0⎥⎥ = ⎢⎢ 1 / 8 ⎥⎥
W B = ⎢9 6
8
⎢⎣5 2
1 ⎥⎦ ⎢⎣1⎥⎦ ⎢⎣ 1 / 8 ⎥⎦
0
1⎤
⎡1
⎢
CW = [1 0 0]⎢ − 1 2 − 3⎥⎥ = [1 0 1]
⎢⎣− 3 − 4 9 ⎥⎦
-1
x&1
u
x& 2
x1
x2
y
x&3
x3
14
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
30. c)
⎡1⎤
⎡0⎤
⎡1⎤ ⎡5⎤
⎢
⎥
⎢
⎥
x (0) = 3⎢ − 1⎥ + 4⎢ 2 ⎥ + 2⎢⎢− 3⎥⎥ = ⎢⎢ − 1⎥⎥
⎢⎣− 3⎥⎦
⎢⎣− 4⎥⎦
⎢⎣ 9 ⎥⎦ ⎢⎣− 7⎥⎦
v′
v ′′
e3
Alternativa 1:
α RE 2 + α IM 2 = 32 + 42 = 5
⎛
⎞
α IM
⎛4⎞
⎜
⎟
= arccos⎜ ⎟ = 0,64
⎟
2
2
⎜ α
⎟
⎝5⎠
RE + α IM ⎠
⎝
⎧
⎡1⎤
⎡ 0 ⎤⎫
⎡1⎤
⎪
⎢
⎥
⎢
⎥
−t ⎪
− 3t ⎢
x (t ) = 5e ⎨sin(2t + 0,64) ⎢ − 1⎥ + cos(2t + 0,64) ⎢ 2 ⎥ ⎬ + 2e ⎢− 3⎥⎥
⎪
⎢⎣− 3⎥⎦
⎢⎣− 4⎥⎦ ⎪⎭
⎢⎣ 9 ⎥⎦
⎩
ϕ = arccos⎜
⎡ 2e −3t + e − t (3 cos(2t ) + 4 sin(2t )) ⎤
⎥
⎢
x (t ) = ⎢− 6e − 3t + e −t (5 cos(2t ) − 10 sin(2t ))⎥
⎥
⎢
18e − 3t + e −t (−25 cos(2t ))
⎦
⎣
Alternativa 2:
(sI − A )−1
⎡ s 2 + 5s + 11
s+5
1⎤
⎥
⎢
s ( s + 5)
s⎥
=
− 15
⎢
2
( s + 3)( s + 2 s + 5) ⎢
− 15s
− 11s − 15 s 2 ⎥
⎦
⎣
1
Sabendo que:
⎡
⎤ 1 − at
1
= e sin(bt )
L−1 ⎢
2
2⎥
⎣ (s + a) + b ⎦ b
⎡
⎤
s+a
L−1 ⎢
= e − at cos(bt )
2
2⎥
+
+
(
s
a
)
b
⎣
⎦
⎤
⎡
1
s 2 + 5s + 11
s+5
⎥
⎢
2
2
2
⎢ ( s + 3)( s + 2s + 5) ( s + 3)(s + 2s + 5) ( s + 3)(s + 2 s + 5) ⎥
⎥
⎢
s( s + 5)
s
− 15
(sI − A )−1 = ⎢
⎥
2
2
2
⎢ ( s + 3)( s + 2s + 5) ( s + 3)(s + 2s + 5) ( s + 3)(s + 2 s + 5) ⎥
⎥
⎢
s2
− 15s
− 11s − 15
⎥
⎢
2
2
2
⎢⎣ ( s + 3)( s + 2s + 5) ( s + 3)(s + 2s + 5) ( s + 3)(s + 2 s + 5) ⎥⎦
1/ 4
(− s + 5) / 4
1/ 8
(− s + 1) / 8 ⎤
⎡ 5 / 8 (3s + 21) / 8
+ 2
+ 2
⎢ s+3 + 2
s + 3 s + 2s + 5
s + 3 s + 2s + 5 ⎥
s + 2s + 5
⎥
⎢
(sI − A )−1 = ⎢ − 15 / 8 + 152 / 8(s − 1) − 3 / 4 + (72 s + 5) / 4 − 3 / 8 + (32 s + 5) / 8 ⎥
⎢ s+3
s + 2s + 5 s + 3 s + 2s + 5 s + 3 s + 2s + 5 ⎥
⎢ 45 / 8 (45s + 75) / 8 9 / 4 (9s + 35) / 4
9/8
( s + 15) / 8 ⎥
− 2
− 2
− 2
⎥
⎢
s + 3 s + 2s + 5
s + 3 s + 2s + 5 ⎦
s + 2s + 5
⎣s +3
15
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
⎡ 5 / 8 1 / 8[3( s + 1) + 18]
+
⎢
(s + 1)2 + 22
⎢ s+3
(sI − A )−1 = ⎢⎢ − 15 / 8 + 1 / 8[15( s +2 1) −230]
(s + 1) + 2
⎢ s+3
⎢ 45 / 8 1 / 8[45( s + 1) + 30]
⎢ s+3 −
(s + 1)2 + 2 2
⎣
{
Análise de Sistemas no Espaço de Estados (soluções)
1 / 4 1 / 4[− ( s + 1) + 6]
+
s+3
(s + 1)2 + 2 2
− 3 / 4 1 / 4[7( s + 1) − 2]
+
s+3
(s + 1)2 + 2 2
9 / 4 1 / 4[9( s + 1) + 26]
−
s+3
(s + 1)2 + 22
1 / 8 1 / 8[− ( s + 1) + 2]⎤
+
⎥
s+3
(s + 1)2 + 2 2 ⎥
− 3 / 8 1 / 8[3( s + 1) + 2]⎥
+
s+3
(s + 1)2 + 2 2 ⎥⎥
9 / 8 1 / 8[( s + 1) + 14] ⎥
−
s+3
(s + 1)2 + 2 2 ⎥⎦
}
Φ (t ) = e At = L−1 (sI − A )−1 =
⎡ 5 − 3t 1 − t
⎢ 8 e + 8 e (3 cos 2t + 9 sin 2t )
⎢ 15
1
⎢− e − 3t + e − t (15 cos 2t − 15 sin 2t )
8
⎢ 8
⎢ 45 − 3t 1 − t
⎢ 8 e − 8 e (45 cos 2t + 15 sin 2t )
⎣
1 − 3t 1 − t
1 − 3t 1 − t
⎤
e + e (− cos 2t + 3 sin 2t )
e + e (− cos 2t + sin 2t ) ⎥
8
8
4
4
⎥
3 − 3t 1 − t
3 − 3t 1 − t
− e + e (7 cos 2t − sin 2t ) − e + e (3 cos 2t + sin 2t )⎥
8
8
4
4
⎥
9 − 3t 1 − t
9 − 3t 1 − t
⎥
e − e (9 cos 2t + 13 sin 2t )
e − e (cos 2t + 7 sin 2t ) ⎥
4
4
8
8
⎦
−3t
−t
⎡ 5 ⎤ ⎡ 2e + e (3 cos 2t + 4 sin 2t ) ⎤
⎢
Logo x (t ) = e At x (0) = e At ⎢ − 1 ⎥ = ⎢− 6e − 3t + e − t (5 cos 2t − 10 sin 2t )⎥⎥ .
⎢ ⎥
⎥
⎢⎣− 7 ⎥⎦ ⎢
18e − 3t + e − t (−25 cos 2t )
⎣
⎦
Idêntico ao resultado obtido pelo método anterior.
31.
31. a)
λ + 9 −1 0
λI − A = 26
λ − 1 = λ3 + 9λ2 + 26λ + 24
24
0 λ
λI − A = 0 ⇔ (λ + 2)(λ + 3)(λ + 4) = 0
⎧ λ1 = −2
⎪
Valores próprios: ⎨λ2 = −3
⎪λ = −4
⎩ 3
Vectores próprios:
•
Para λ1 = −2 vem:
•
⎡ 7 − 1 0 ⎤ ⎡ x1 ⎤ ⎡0⎤
⎡1⎤
⎢26 − 2 − 1 ⎥ ⎢ x ⎥ = ⎢0⎥ ⇒ e = ⎢ 7 ⎥
1
⎢
⎥⎢ 2 ⎥ ⎢ ⎥
⎢ ⎥
⎢⎣24 0 − 2⎥⎦ ⎢⎣ x3 ⎥⎦ ⎢⎣0⎥⎦
⎢⎣12⎥⎦
Para λ2 = −3 vem:
•
⎡ 6 − 1 0 ⎤ ⎡ x1 ⎤ ⎡0⎤
⎡1⎤
⎢26 − 3 − 1⎥ ⎢ x ⎥ = ⎢0⎥ ⇒ e = ⎢6⎥
2
⎢
⎥⎢ 2 ⎥ ⎢ ⎥
⎢ ⎥
⎢⎣24 0 − 3⎥⎦ ⎢⎣ x3 ⎥⎦ ⎢⎣0⎥⎦
⎢⎣8⎥⎦
Para λ3 = −4 vem:
⎡ 5 − 1 0 ⎤ ⎡ x1 ⎤ ⎡0⎤
⎡1⎤
⎢26 − 4 − 1⎥ ⎢ x ⎥ = ⎢0⎥ ⇒ e = ⎢5⎥
2
⎢
⎥⎢ 2 ⎥ ⎢ ⎥
⎢ ⎥
⎢⎣24 0 − 4⎥⎦ ⎢⎣ x3 ⎥⎦ ⎢⎣0⎥⎦
⎢⎣6⎥⎦
16
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
Representação diagonal:
⎡1
⎢
x = Wd → W = ⎢ 7
⎢12
⎣
e1
2 − 1⎤
1 1⎤
⎡−4
⎥
1⎢
-1
6 5 ⎥ → W = − ⎢ 18 − 6 2 ⎥⎥
2
⎢⎣− 16 4
1 ⎥⎦
8 6⎥⎦
e2 e3
Λ
⎧⎪Wd& = AWd + Bu
⎧⎪d& = W -1AWd + W -1Bu
⎧ x& = Ax + Bu
→⎨
⇔⎨
⎨
⎪⎩ y = CWd + Du
⎪⎩
y = CWd + Du
⎩ y = Cx + Du
0⎤
⎡− 2 0
⎢
Λ = ⎢ 0 − 3 0 ⎥⎥ = W -1AW
⎢⎣ 0
0 − 4⎥⎦
2 − 1⎤ ⎡2⎤
⎡−4
1
W -1B1 = − ⎢⎢ 18 − 6 2 ⎥⎥ ⎢⎢5⎥⎥ =
2
⎢⎣− 16 4
1 ⎥⎦ ⎢⎣0⎥⎦
⎡ 1 1 1⎤
C1W = [1 2 − 1]⎢⎢ 7 6 5⎥⎥ = [3
⎢⎣12 8 6⎥⎦
Sistema 1:
⎡ − 1⎤
⎢− 3⎥
⎢ ⎥
⎢⎣ 6 ⎥⎦
⎡ − 4 2 − 1⎤ ⎡2⎤ ⎡ 0 ⎤
1
W -1B 2 = − ⎢⎢ 18 − 6 2 ⎥⎥ ⎢⎢4⎥⎥ = ⎢⎢− 6⎥⎥
2
⎢⎣− 16 4
1 ⎥⎦ ⎢⎣0⎥⎦ ⎣⎢ 8 ⎥⎦
⎡ 1 1 1⎤
C2 W = [4 2 − 2]⎢⎢ 7 6 5⎥⎥ = [− 6 0 2]
⎢⎣12 8 6⎥⎦
5 5]
x&1
u
x& 2
x1
x2
y
x&3
x3
17
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
Sistema 2:
x&1
x& 2
u
x1
x2
y
x&3
x3
31. b)
Sistema 1:
Y ( s)
= C1 ( sI − A) −1 B1
U ( s)
−1
⎡ s + 9 − 1 0 ⎤ ⎡2⎤
Y ( s)
= [1 2 − 1]⎢⎢ 26
s − 1⎥⎥ ⎢⎢5⎥⎥
U ( s)
⎢⎣ 24
s ⎥⎦ ⎢⎣0⎥⎦
0
⎡
⎤ ⎡2⎤
1
s2
s
⎢
⎥
1
2
=
[1 2 − 1]⎢− 26s − 24 s + 9s
s + 9 ⎥ ⎢⎢5⎥⎥
( s + 2)(s + 3)( s + 4)
⎢ − 24 s
− 24 s 2 + 9 s + 26⎥ ⎢⎣0⎥⎦
⎣
⎦
12 s 2 + 39 s + 24
Y ( s)
=
U ( s) ( s + 2)( s + 3)( s + 4)
Sistema 2:
Y ( s)
= C2 ( sI − A) −1 B 2
U ( s)
−1
⎡ s + 9 − 1 0 ⎤ ⎡ 2⎤
Y ( s)
= [4 2 − 2]⎢⎢ 26
s − 1⎥⎥ ⎢⎢4⎥⎥
U ( s)
⎢⎣ 24
s ⎥⎦ ⎢⎣0⎥⎦
0
⎡
⎤ ⎡2⎤
s2
s
1
⎢
⎥
1
2
=
s + 9 ⎥ ⎢⎢4⎥⎥
[4 2 − 2]⎢− 26s − 24 s + 9s
( s + 2)( s + 3)(s + 4)
⎢ − 24 s
− 24 s 2 + 9 s + 26⎥ ⎢⎣0⎥⎦
⎣
⎦
Y ( s)
16( s 2 + 5s + 6)
16
=
=
U ( s) ( s + 2)( s + 3)( s + 4) s + 4
18
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
31. c)
Sistema 1:
Controlabilidade: Q1 = B1 AB1 A 2B1
[
]
[
Observabilidade: R1 = C1 C1A C1A 2
⎡ − 9 1 0⎤ ⎡2⎤ ⎡ − 13 ⎤
AB1 = ⎢⎢− 26 0 1⎥⎥ ⎢⎢5⎥⎥ = ⎢⎢ − 52⎥⎥
⎢⎣− 24 0 0⎥⎦ ⎢⎣0⎥⎦ ⎢⎣− 48⎥⎦
⎡ 55 − 9 1⎤ ⎡2⎤ ⎡ 65 ⎤
2
A B1 = AAB1 = ⎢⎢210 − 26 0⎥⎥ ⎢⎢5⎥⎥ = ⎢⎢290⎥⎥
⎢⎣216 − 24 0⎥⎦ ⎢⎣0⎥⎦ ⎢⎣312⎥⎦
⎡2 − 13 65 ⎤
Q1 = ⎢⎢5 − 52 290⎥⎥
⎢⎣0 − 48 312⎥⎦
det(Q1 ) = 72 ≠ 0 ⇒ r (Q) = 3
⎡ −9
C1A = [1 2 − 1]⎢⎢− 26
⎢⎣− 24
⎡ 55
2
C1A = [1 2 − 1]⎢⎢210
⎢⎣216
→ o sistema é controlável
→ o sistema é observável
Sistema 2:
Controlabilidade: Q 2 = B 2
[
AB 21
A 2B 2
]
]
T
1 0⎤
0 1⎥⎥ = [− 37 1 2]
0 0⎥⎦
−9
1⎤
− 26 0⎥⎥ = [259 − 37 1]
− 24 0⎥⎦
2
− 1⎤
⎡ 1
⎢
R1 = ⎢− 37
1
2 ⎥⎥
⎢⎣ 259 − 37 1 ⎥⎦
det(R1 ) = 75 ≠ 0 ⇒ r (Q) = 3
[
Observabilidade: R2 = C 2
C2 A C2 A 2
]
T
⎡ − 9 1 0⎤ ⎡2⎤ ⎡ − 14 ⎤
AB 2 = ⎢⎢− 26 0 1⎥⎥ ⎢⎢4⎥⎥ = ⎢⎢ − 52⎥⎥
⎢⎣− 24 0 0⎥⎦ ⎢⎣0⎥⎦ ⎢⎣− 48⎥⎦
⎡ 55 − 9 1⎤ ⎡2⎤ ⎡ 74 ⎤
A 2B 2 = ⎢⎢210 − 26 0⎥⎥ ⎢⎢4⎥⎥ = ⎢⎢316⎥⎥
⎢⎣216 − 24 0⎥⎦ ⎢⎣0⎥⎦ ⎢⎣336⎥⎦
⎡2 − 14 74 ⎤
Q 2 = ⎢⎢4 − 52 316⎥⎥
⎢⎣0 − 48 336⎥⎦
det(Q 2 ) = 0 ⇒ r (Q) = 2 < 3
⎡ − 9 1 0⎤
C2 A = [4 2 − 2]⎢⎢− 26 0 1⎥⎥ = [− 40 4 2]
⎢⎣− 24 0 0⎥⎦
⎡ 55 − 9 1⎤
C2 A 2 = [4 2 − 2]⎢⎢210 − 26 0⎥⎥ = [208 − 40 4]
⎢⎣216 − 24 0⎥⎦
− 2⎤
2
⎡ 4
R 2 = ⎢⎢− 40
4
2 ⎥⎥
⎢⎣ 208 − 40 4 ⎥⎦
det(R 2 ) = 0 ⇒ r (Q) = 2 < 3
→ o sistema não é completamente controlável
→ o sistema não é completamente observável
31. d)
⎡1⎤ ⎡10 ⎤
⎡1 ⎤
⎡1⎤
⎥
⎥
⎢
⎢
x (0) = 5⎢ 7 ⎥ + 2⎢6⎥ + 3⎢⎢5⎥⎥ = ⎢⎢62⎥⎥
⎢⎣6⎥⎦ ⎢⎣94⎥⎦
⎢⎣8⎥⎦
⎢⎣12⎥⎦
e1
e2
e3
Alternativa 1:
x (t ) = 5e
−2t
−3t
−4 t ⎤
⎡1⎤ ⎡ 5e + 2e + 3e
⎡1⎤
⎡1⎤
⎢ − 2t
⎥
− 3t ⎢ ⎥
− 4t ⎢ ⎥
− 3t
− 4t ⎥
⎢ 7 ⎥ + 2e ⎢6⎥ + 3e ⎢5⎥ = ⎢35e + 12e + 15e ⎥
⎢⎣6⎥⎦ ⎢60e − 2t + 16e − 3t + 18e − 4t ⎥
⎢⎣8⎥⎦
⎢⎣12⎥⎦
⎣
⎦
− 2t ⎢
19
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
Alternativa 2:
⎡s + 9 − 1 0 ⎤
(sI − A ) = ⎢⎢ 26 s − 1⎥⎥
⎢⎣ 24
s ⎥⎦
0
⎡
s2
⎢
1
(sI − A ) =
⎢− 26 s − 24
( s + 2)( s + 3)( s + 4) ⎢
− 24 s
⎣
9
2
⎡ 8
⎢s + 4 − s + 3 + s + 2 −
⎢ 40
54
14
Φ ( s ) = (sI − A )−1 = ⎢
−
+
−
+
+
+2
4
3
s
s
s
⎢
⎢ 48 − 72 + 24 −
⎢⎣ s + 4 s + 3 s + 2
−1
{
Φ(t ) = e At = L−1 (sI − A )−1
}
⎤
1
⎥
s ( s + 9)
s+9 ⎥
− 24
s 2 + 9 s + 26⎥
⎦
2
3
1
1/ 2
1
1/ 2 ⎤
+
−
−
+
s + 4 s + 3 s + 2 s + 4 s + 3 s + 2⎥
10
18
7
5/ 2
6
7/2 ⎥
⎥
+
−
−
+
s + 4 s + 3 s + 2 s + 4 s + 3 s + 2⎥
12
24
12
3
8
6 ⎥
+
−
−
+
s + 4 s + 3 s + 2 s + 4 s + 3 s + 2 ⎥⎦
s
⎡
− 2t
− 3t
− 4t
⎢ 2e − 9e + 8e
⎢
= ⎢14e − 2t − 54e − 3t + 40e − 4t
⎢
⎢24e − 2t − 72e − 3t + 48e − 4t
⎢⎣
⎡10 ⎤
⎡ 5e −2t + 2e −3t + 3e −4t ⎤
⎢⎣94⎥⎦
⎢60e −2t + 16e −3t + 18e −4t ⎥
⎣
⎦
− e − 2t + 3e − 3t − 2e − 4t
− 7e − 2t + 18e − 3t − 10e − 4t
− 12e − 2t + 24e − 3t − 12e − 4t
1 − 2t
1
⎤
e − e − 3t + e − 4t ⎥
2
2
⎥
7 − 2t
5
e − 6e − 3t + e − 4t ⎥
2
2
⎥
6e − 2t − 8e − 3t + 3e − 4t ⎥
⎥⎦
Logo x (t ) = e At x (0) = e At ⎢62⎥ = ⎢⎢35e −2t + 12e −3t + 15e −4t ⎥⎥
⎢ ⎥
32.
32. a)
⎡ − 1 0 0⎤
A = ⎢⎢ 0 − 2 0⎥⎥, B T = [1 0 2], C = [2 3 4]
⎢⎣ 0
0 1⎥⎦
32. b)
Y (s)
10( s + 0.6)
2
8
=
+
=
U ( s ) s + 1 s − 1 ( s + 1)( s − 1)
32. c)
O sistema é instável (devido ao pólo em 1) e não é controlável (o modo correspondente ao pólo em -2 não é
excitado pela entrada u).
33.
33. a)
⎡ − 1 0 0⎤
A = ⎢⎢ 0 − 2 0⎥⎥, B T = [1 0 2], C = [2 3 4]
⎢⎣ 0
0 1⎥⎦
33. b)
O sistema é estável, não é controlável e não é observável.
33. c)
Y (s)
1
=
U ( s) s + 1
20
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
33. d)
y(t)
34.
34. a)
⎧⎡ x&1 ⎤ ⎡ 0
⎧⎡ x&1 ⎤ ⎡ 0
1 ⎤ ⎡ x1 ⎤ ⎡0⎤
1 ⎤ ⎡ x1 ⎤ ⎡0⎤
+ ⎢ ⎥u
u
+
⎪⎢ ⎥ = ⎢
⎪⎢ ⎥ = ⎢
⎥
⎢
⎥
&
&
x
−
a
−
a
x
x
1
5
6⎥⎦ ⎢⎣ x2 ⎥⎦ ⎢⎣1⎥⎦
−
−
⎪⎣ 2 ⎦ ⎣ 2
⎪⎣ 2 ⎦ ⎣
1⎦⎣ 2 ⎦
⎣ ⎦
⇒ ⎨
⎨
T
T
⎡2⎤ ⎡ x1 ⎤
⎪ y = ⎡b2 − a2b0 ⎤ ⎡ x1 ⎤ + b u
⎪
y
=
0
⎢ b − a b ⎥ ⎢x ⎥
⎢0⎥ ⎢ x ⎥
⎪
⎪
1 0 ⎦ ⎣ 2⎦
⎣ ⎦ ⎣ 2⎦
⎣ 1
⎩
⎩
34. b)
{
Φ(t ) = e At = L−1 (sI − A )
−1
}
⎡ 1 − 5t 5 − t
⎢− e + 4 e
=⎢ 4
5
5
⎢ e − 5t − e − t
4
⎣ 4
1 − 5t 1 − t ⎤
e + e ⎥
4
4
5 − 5t 1 − t ⎥
e − e ⎥
4
4
⎦
−
34. c)
Y (s)
2
= C(sI − A )−1 B + D =
U (s)
( s + 5)( s + 1)
35.
35 a)
⎧⎡ x&1 ⎤ ⎡ − a1
⎪⎢ ⎥ = ⎢
⎪⎣ x& 2 ⎦ ⎣− a2
⎨
⎪
y = [1
⎪⎩
⎧⎡ x&1 ⎤ ⎡− 4 1⎤ ⎡ x1 ⎤ ⎡2⎤
1⎤ ⎡ x1 ⎤ ⎡ b1 − a1b0 ⎤
+⎢
u
u
⎪⎢ ⎥ = ⎢
⎥
⎥
⎢
⎥
⎢ ⎥+
0⎦ ⎣ x2 ⎦ ⎣b2 − a2b0 ⎦
− 3 0⎥⎦ ⎣ x2 ⎦ ⎢⎣4⎥⎦
⎪ x&
⇒ ⎨⎣ 2 ⎦ ⎣
⎡x ⎤
⎡x ⎤
⎪
y = [1 0]⎢ 1 ⎥
0]⎢ 1 ⎥ + b0u
⎪
⎣ x2 ⎦
⎣ x2 ⎦
⎩
35. b)
Controlabilidade: Q = [B AB]
Observabilidade: R = [C CA ]T
AB = [− 4 − 6]T
CA = [−4 1]
⎡ 2 − 4⎤
Q=⎢
⎥
⎣4 − 6⎦
det(Q) = 4 ≠ 0 ⇒ r (Q) = 2
⎡ 1 0⎤
R=⎢
⎥
⎣− 4 1⎦
det(R ) = 1 ≠ 0 ⇒ r (Q) = 2
→ o sistema é completamente controlável
→ o sistema é completamente observável
21
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
35. c)
⎡− 4 1⎤
A=⎢
⎥ tem valores próprios:
⎣ − 3 0⎦
Análise de Sistemas no Espaço de Estados (soluções)
⎧λ1 = −3
⎡1⎤
⎡1⎤
e vectores próprios: v1 = ⎢ ⎥, v 2 = ⎢ ⎥
⎨
λ
=
−
1
3
⎩ 2
⎣ ⎦
⎣1⎦
⎧⎪d& = W -1 AWd + W -1Bu
⎨
⎪⎩
y = CWd + Du
⎡1 1⎤
⎡-1 0 ⎤
W=⎢
→ Λ = W -1 AW = ⎢
⎥
⎥
⎣3 1⎦
⎣ 0 -3⎦
⎡1⎤
W -1B = ⎢ ⎥
⎣1⎦
CW = [1 1]
36.
36. a)
x = [v1 v2
⎧
⎡
⎪
⎢−
⎪
⎢
⎪x& = ⎢
⎨
⎢
⎪
⎢
⎪
⎢⎣
⎪
⎩
i ]T
1
RC
0
1
L
0
1
RC
1
−
L
y = [0
−
1⎤
⎡ 1 ⎤
C⎥
⎢ RC ⎥
1 ⎥
⎥ x + ⎢ 0 ⎥u
⎥
⎢
C ⎥
⎢ 0 ⎥
⎥
0 ⎥
⎥⎦
⎢⎣
⎦
1 0]x
−
36. b) Fazendo: 1/RC = 3, 1/C = 1 e 1/L = 2
⎧⎡ v&1 ⎤ ⎡− 3 0 − 1⎤ ⎡ v1 ⎤ ⎡3⎤
⎪⎢ ⎥ ⎢
⎥⎢ ⎥ ⎢ ⎥
⎪⎢v&2 ⎥ = ⎢ 0 − 3 1 ⎥ ⎢v2 ⎥ + ⎢0⎥u
⎪⎪⎢⎣ i& ⎥⎦ ⎢⎣ 2 − 2 0 ⎥⎦ ⎢⎣ i ⎥⎦ ⎢⎣0⎥⎦
⎨
⎡ v1 ⎤
⎪
⎪
y = [0 1 0]⎢⎢v2 ⎥⎥
⎪
⎢⎣ i ⎥⎦
⎩⎪
⎡ s 2 + 3s + 2
s + 3 ⎤ ⎡ 3⎤
2
⎥
⎢
V2 (s)
6
1
−1
2
[0 1 0]⎢ 2
s + 3s + 2
s + 3 ⎥ ⎢⎢0⎥⎥ = 3
= C(sI − A ) B = 3
2
2
Vi ( s )
s
+
6
s
+ 13s + 9
s + 6s + 13s + 9
⎢ 2s + 6
s 2 + 6s + 9⎥ ⎢⎣0⎥⎦
− 2s − 6
⎦
⎣
37.
37. a)
⎧
R⎤
⎡ 2R
⎡1⎤
−
− ⎥
⎪
⎧⎡ x& ⎤ ⎡− 20 − 10⎤ ⎡ x ⎤ ⎡ 1 ⎤
⎢
&
x
x
⎡ ⎤
L1 ⎡ 1 ⎤ ⎢ L1 ⎥
⎧ u = R(x1 + x2 ) + Rx1 + L1 x&1
1
⎪⎢ 1 ⎥ = ⎢ L1
⎥ ⎢ ⎥ + ⎢ ⎥u ⎪⎢ 1 ⎥ = ⎢
⎥ ⎢ x ⎥ + ⎢ 1 ⎥u
⎪u = R(x + x ) + Rx + L x&
R
R
2
1
&
&
x
x
x
5
10
−
−
⎪
⎪
⎥⎣ 2 ⎦ ⎢ ⎥
⎦ ⎣ 2 ⎦ ⎢⎣ 2 ⎥⎦
⎪⎣ 2 ⎦ ⎢ −
⎪
⎪⎣ 2 ⎦ ⎣
1
2
2
2 2
−
⇒⎨
⎨
⎢⎣ L2
⎢⎣ L2 ⎥⎦ ⇒ ⎨
L2 ⎥⎦
=
y
Rx
1
2
⎪
⎪
⎪⎡ y1 ⎤ ⎡ 0
10 ⎤ ⎡ x1 ⎤ ⎡0⎤
⎪⎡ y1 ⎤ ⎡ 0
⎪⎩
⎪⎢ ⎥ = ⎢
R ⎤ ⎡ x1 ⎤ ⎡0⎤
⎥ ⎢ ⎥ + ⎢ ⎥u
u = R(x1 + x2 ) + y2
⎪⎩⎣ y2 ⎦ ⎣− 10 − 10⎦ ⎣ x2 ⎦ ⎣1⎦
+ ⎢ ⎥u
⎪⎢ ⎥ = ⎢
⎢
⎥
⎥
⎩⎪⎣ y2 ⎦ ⎣− R − R ⎦ ⎣ x2 ⎦ ⎣1⎦
22
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
37. b)
10 ⎤
⎡ s + 20
sI − A = ⎢
s + 10⎥⎦
⎣ 5
Φ ( s ) = (sI − A )−1 =
→
sI − A = s 2 + 30 s + 150 = ( s + 23,67)( s − 6,34)
⎡ s + 10 − 10 ⎤
1
⎢
⎥
( s + 23,67)( s − 6,34) ⎣ − 5 s + 20⎦
⎧⎪
⎡ s + 10 − 10 ⎤ ⎫⎪
1
Φ (t ) = e At = L−1 ⎨
⎢
⎥⎬
⎪⎩ ( s + 23,67)( s − 6,34) ⎣ − 5 s + 20⎦ ⎪⎭
37. c)
10 ⎤ ⎡ s + 10 − 10 ⎤ ⎡ 1 ⎤ ⎡0⎤
⎡ G1 ( s ) ⎤
⎡ 0
1
−1
⎢G ( s )⎥ = C(sI − A ) B + D =
⎢− 10 − 10⎥ ⎢ − 5 s + 20⎥ ⎢ 1 ⎥ + ⎢1⎥
( s + 23,67)( s − 6,34) ⎣
⎦⎣
⎦ ⎢⎣ 2 ⎥⎦ ⎣ ⎦
⎣ 2 ⎦
5s + 50
⎡
⎤
⎡ Y1 ( s ) ⎤ ⎢ ( s + 23,67)( s − 6,34) ⎥
⎥U ( s )
⎢Y ( s )⎥ = ⎢
s 2 + 15s + 50
⎥
⎣ 2 ⎦ ⎢
⎢ ( s + 23,67)( s − 6,34) ⎥
⎣
⎦
37. d) É controlável e observável.
x&1
y2
x1
u
x& 2
x2
y1
38.
⎧u = R1i1 + L1i&1 + R2i2 + v2
⎪
i1 − i3 = C2 v&2
i2 = C2 v&2
⎧
⎪
⎪
⎪
&
⎨ R2i2 + v2 = L3i3 + R3i3 ⇒ ⎨ R2 (i1 − i3 ) + v2 = L3i&3 + R3i3
⎪
⎪ R (i − i ) + v = y + R i
i1 = i2 + i3
2
33
⎩ 2 1 3
⎪
⎪⎩
y = L3i&3
23
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
⎧
⎡ R1
⎤
1
R
−
− 2
⎡1⎤
⎪
⎢−
⎥
L1
L2
⎪⎡ i&1 ⎤ ⎢ L1
⎥ ⎡ i1 ⎤ ⎢ L1 ⎥
1
⎪⎢ & ⎥ ⎢ 1
⎥ ⎢v ⎥ + ⎢ 0 ⎥ u
0
−
⎪ ⎢v 2 ⎥ = ⎢ C
⎥⎢ 2 ⎥ ⎢ ⎥
C
2
2
⎢ ⎥ ⎢ ⎥
⎪⎪⎢⎣ i&3 ⎥⎦ ⎢ R
− ( R2 + R3 ) ⎥⎥ ⎣ i3 ⎦ ⎢ 0 ⎥
1
⎨
⎢ 2
⎣ ⎦
⎪
L3
L3
⎣⎢ L3
⎦⎥
⎪
⎡ i1 ⎤
⎪
⎪
y = [R2 1 − ( R2 + R3 )]⎢⎢v2 ⎥⎥
⎪
⎢⎣ i3 ⎥⎦
⎪⎩
39.
⎧u = R1i1 + L1i&1 + v1 + y
⎪
y = L2i&2
⎪
⎪⎪
⎧
i1 = i + i2
L2i&2 = (i1 − i2 ) R2 + v2
⎧ y = R2 (i1 − i2 ) + v2
⇒⎨
⇒⎨
⎨
&
y = R2i + v2
⎩ C2 v&2 = i1 − i2
⎩u = R1i1 + L1i1 + v1 + R2 (i1 − i2 ) + v2
⎪
⎪
i1 = C1v&1
⎪
⎪⎩
i = C2 v&2
x = [i1 i2
v1 v2 ]T
⎧
1
1⎤
R2
⎡ − ( R1 + R2 )
−
− ⎥
⎪
⎢
L
L
L
L
1
1
1
1⎥
⎡1⎤
⎪
⎢
1 ⎥
R2
R2
⎢L ⎥
⎪
⎢
−
0
⎢ 1⎥
⎪
⎢
L2
L2
L2 ⎥
+
x
⎪x& = ⎢
⎢ 0 ⎥u
⎥
1
⎨
⎢0⎥
⎢
⎥
0
0
0
⎪
C1
⎢ ⎥
⎢
⎥
⎪
⎢⎣ 0 ⎥⎦
⎢
⎥
1
1
⎪
−
0
0 ⎥
⎢
⎪
C2
C2
⎣
⎦
⎪
y = [R2 − R2 0 1]x
⎩
40.
40. a)
Θ( s )
0,5
0,5
0,625
=
=
= 3
3
2
V ( s ) s (0,8s + 8)(s + 1) + 0,25s 0,8s + 8,8s + 8,25s s + 11s 2 + 10,3125s
Forma canónica observável:
⎧
⎧⎡ x&1 ⎤ ⎡ − 11
⎧⎡ x&1 ⎤ ⎡ − a1 1 0⎤ ⎡ x1 ⎤ ⎡ b1 − a1b0 ⎤
a1 = 11
⎪
⎪⎢ ⎥ ⎢
⎪⎢ ⎥ ⎢
⎥
⎢
⎥
⎢
⎥
&
⎪ a = 10,3125
⎪⎢ x2 ⎥ = ⎢− a2 0 1⎥ ⎢ x2 ⎥ + ⎢b2 − a2b0 ⎥
⎪⎢ x& 2 ⎥ = ⎢− 10,3125
2
⎪⎪
⎪⎪⎢ x& ⎥ ⎢
⎪⎪⎢⎣ x&3 ⎥⎦ ⎢⎣ − a3 0 0⎥⎦ ⎢⎣ x3 ⎥⎦ ⎢⎣ b3 − a3b0 ⎥⎦
0
⇒ ⎨⎣ 3 ⎦ ⎣
com ⎨
a3 = 0
⎨
⎡ x1 ⎤
⎪b = b = b = 0 ⎪
⎪
1
2
⎪
⎪ 0
⎪
y = [1 0 0]⎢⎢ x2 ⎥⎥ + b0u
y = [1
⎪
⎪
⎪ b3 = 0,625
⎢
⎥
x
⎪⎩
⎣ 3⎦
⎩⎪
⎩⎪
1 0⎤ ⎡ x1 ⎤ ⎡ 0 ⎤
0 1⎥⎥ ⎢⎢ x2 ⎥⎥ + ⎢⎢ 0 ⎥⎥
0 0⎥⎦ ⎢⎣ x3 ⎥⎦ ⎢⎣0,625⎥⎦
⎡ x1 ⎤
0 0]⎢⎢ x2 ⎥⎥
⎢⎣ x3 ⎥⎦
24
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
40. b)
u
x&3
40. c)
Controlabilidade: Q = B AB A 2 B
[
x3
]
⎡ 0 ⎤
AB = ⎢⎢0,625⎥⎥
⎢⎣ 0 ⎥⎦
− 11 1⎤ ⎡ 0 ⎤ ⎡0,625⎤
⎡110,687
⎢
2
A B = ⎢113,437 − 10,3125 0⎥⎥ ⎢⎢ 0 ⎥⎥ = ⎢⎢ 0 ⎥⎥
⎢⎣
0
0 0⎥⎦ ⎢⎣0,625⎥⎦ ⎢⎣ 0 ⎥⎦
0
0,625⎤
⎡ 0
⎢
0,625
0 ⎥⎥
Q=⎢ 0
⎢⎣0,625
0
0 ⎥⎦
x& 2
x2
x&1
y
x1
[
Observabilidade: R = C CA CA 2
]
T
CA = [− 11 1 0]
CA 2 = [110,6875 − 11 1]
1
0 0⎤
⎡
1 0⎥⎥
R = ⎢⎢ − 11
⎢⎣110,6875 − 11 1⎥⎦
det(R ) = 1 ≠ 0 ⇒ r (Q) = 3
→ o sistema é completamente observável
det(Q) = −0,6253 ≠ 0 ⇒ r (Q) = 3
→ o sistema é completamente controlável
41.
41 a)
⎧ A h& = q − q
1
1
⎧ &
1
i
⎪ 11
⎪⎪ h1 = − A R h1 + A qi
h1
⎪
1 1
1
⇒⎨
⎨ q1 =
1
1
R
&
1
⎪
⎪h2 =
h1 −
h2
A2 R1
A2 R2
⎪⎩ A2 h&2 = q1 − q0
⎩⎪
h
q0 = 2
R2
⎧
1
⎡
⎤
0 ⎥
⎡1⎤
⎪⎡ x& ⎤ ⎢− A R
⎡x ⎤
1
⎪⎢ ⎥ = ⎢ 1 1
⎥ ⎢ 1 ⎥ + ⎢ A1 ⎥u
1 ⎥ ⎣ x2 ⎦ ⎢ ⎥
⎪⎪⎣ x& 2 ⎦ ⎢ 1
−
⎣0⎦
⎨
⎢⎣ A2 R1
A2 R2 ⎥⎦
⎪
⎪
⎡
⎤⎡ x ⎤
1
0⎥ ⎢ 1 ⎥
⎪ y = ⎢0
R2
⎪⎩
⎣
⎦ ⎣ x2 ⎦
25
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
41 b) Para R1 = 1/2, R2 = 1, A1 = 1, A2 = 2
0 ⎤
⎡− 2
⎡1⎤
A=⎢
, B = ⎢ ⎥, C = [0 1]
⎥
⎣ 1 − 0,5⎦
⎣0 ⎦
1
⎡
⎢
Y (s)
s+2
= C(sI − A )−1 B = [0 1]⎢
1
U (s)
⎢
(
)(
⎣⎢ s + 2 s + 0,5)
⎤
⎥ ⎡1 ⎤
1
1 ⎥ ⎢0⎥ = ( s + 2)( s + 0,5)
⎥⎣ ⎦
(s + 0,5)⎦⎥
0
41 c)
Controlabilidade: Q = [B AB]
Observabilidade: R = [C CA ]T
0 ⎤ ⎡1 ⎤ ⎡ − 2 ⎤
⎡− 2
AB = ⎢
⎥⎢ ⎥ = ⎢ ⎥
⎣ 1 − 0,5⎦ ⎣0⎦ ⎣ 1 ⎦
⎡1 − 2⎤
Q=⎢
⎥
⎣0 1 ⎦
det(Q) = 1 ≠ 0 ⇒ r (Q) = 2
0 ⎤
⎡− 2
CA = ⎢
⎥[0 1] = [1 − 0,5]
⎣ 1 − 0,5⎦
1 ⎤
⎡0
R=⎢
⎥
⎣1 − 0,5⎦
→ o sistema é controlável
→ o sistema é observável
det(R ) = −1 ≠ 0 ⇒ r (Q) = 2
41 d)
0 ⎤
⎡− 2
A=⎢
⎥ tem valores próprios:
⎣ 1 − 0,5⎦
⎧ λ1 = −2
⎡0 ⎤
⎡− 1,5⎤
e vectores próprios: v1 = ⎢
, v2 = ⎢ ⎥
⎨
⎥
⎣1 ⎦
⎣ 1 ⎦
⎩λ2 = −0,5
0 ⎤
⎡− 2
⎡− 1,5 0⎤
→ Λ = W -1 AW = ⎢
W = [v1 v2 ] = ⎢
⎥
⎥
1⎦
⎣ 0 − 0,5⎦
⎣ 1
⎡ 1⎤
⎤
⎡ 1
0⎥
−
⎢− 1,5 ⎥
⎢
1
⎡
⎤
W -1B = ⎢ 1,5
⎥
⎥⎢ ⎥ = ⎢
1 ⎥
⎢ 1
1 ⎥ ⎣0 ⎦ ⎢
⎣⎢ 1,5 ⎦⎥
⎦⎥
⎣⎢ 1,5
⎡− 1,5 0⎤
= [1 1]
CW = [0 1]⎢
1⎥⎦
⎣ 1
⎧⎪d& = Λd + W -1Bu
⎨
⎪⎩
y = CWd
26
MCSDI – Modelação e Controlo de Sistemas Dinâmicos
Análise de Sistemas no Espaço de Estados (soluções)
42. entrada i(t) e saída y(t)
R1
+
+
R2
u
vC
−
x = [v C
[
i L ]T e x& = v&C
i&L
L
y
C
iL
R3
−
]T
u = R1 (Cv&C + i L ) + R 2 Cv&C + v C ⇔ v&C =
R 2 Cv& C + v C = Li&L + R3 i L ⇔ Li&L =
1
(u − R1i L − vC )
( R1 + R 2 )C
R2 C
(u − R1i L − v C ) + v C − R3 i L ⇔
( R1 + R 2 )C
⎞
⎞
⎞
R2
R1
1⎛
1 ⎛ R1 R 2
1⎛
⎟⎟u − ⎜⎜
⎟v C
⇔ i&L = ⎜⎜
+ R3 ⎟⎟i L + ⎜⎜
L ⎝ ( R1 + R 2 ) ⎠
L ⎝ ( R1 + R 2 )
L ⎝ ( R1 + R 2 ) ⎟⎠
⎠
⎛
⎞ ⎛ R1 R 2 ⎞
⎛
⎞
R2
R1
⎟⎟u − ⎜⎜
⎟⎟i L + ⎜⎜
⎟⎟v C
y = Li&L + R3 i L = ⎜⎜
⎝ ( R1 + R 2 ) ⎠ ⎝ ( R1 + R 2 ) ⎠
⎝ ( R1 + R 2 ) ⎠
R1
1
1
⎡
⎤
⎡
⎤
−
⎢ − ( R + R )C
⎥
⎢
⎥
+
R
R
C
(
)
( R1 + R 2 )C
R1
1
2
1
2
⎥, B = ⎢
⎥, C = ⎡⎢
A=⎢
⎞⎥
⎞
⎞⎥
R2
R1
1 ⎛ R1 R 2
⎢1 ⎛
⎢ 1 ⎛⎜
(
R
⎣ 1 + R2 )
⎢ L ⎜⎜ ( R + R ) ⎟⎟ − L ⎜⎜ ( R + R ) + R3 ⎟⎟⎥
⎢ L ⎜ ( R + R ) ⎟⎟⎥
2 ⎠⎦
2 ⎠
2
⎝ 1
⎠⎦
⎣ ⎝ 1
⎣ ⎝ 1
−
R1 R 2 ⎤
R2
⎥, D =
( R1 + R 2 ) ⎦
( R1 + R 2 )
27