0.1 Problemas correspondentes ao Capítulo 3
1
0.1 Problemas correspondentes ao Capítulo 3
Cinemática Vetorial
1.
(a) Devemos decompor o movimento da pedra em movimento vertical e movimento
horizontal. Como o movimento horizontal não é acelerado, temos D = vH tq , onde
vH é o módulo da componente horizontal da velocidade, que permanece constante
desde o lançamento da pedra até o instante em que ela toca o solo, e tq é o tempo de
queda, isto é, o intervalo de tempo transcorrido desde o lançamento até o instante
em que a pedra toca o solo. O tempo de queda pode ser calculado analisando-se o
movimento vertical da pedra:
1
h = g t2q
2
Desta forma, concluímos que vH = D
=⇒
p
tq =
s
2h
.
g
g/(2h) e, conseqüentemente, a velocidade
da pedra no instante do lançamento é dada por
r
g
~v = D
ı̂ .
2h
(b) Para determinarmos a velocidade da pedra no instante em que ela toca o solo, devemos calcular a componente vertical de sua velocidade, uma vez que a componente
horizontal é a mesma durante todo o movimento, e já foi calculada no item anterior. Por conveniência, vamos escolher eixos cartesianos de modo que o movimento
ocorra no plano OX Y, com o eixo OX horizontal apontando no sentido do lançamento, o eixo OY vertical e apontando para cima e a origem no solo. Com isso, a
componente vertical da velocidade da pedra no instante em que toca o solo é dada
por
vy = −gtq
=⇒
vy = −g
s
p
2h
= − 2gh ,
g
resultado que poderia ter sido obtido também pela equação de Torricelli. Portanto,
a velocidade da pedra no instante em que toca o solo é dada por
r
p
g
~v = D
ı̂ − 2gh ̂ .
2h
0.1 Problemas correspondentes ao Capítulo 3
2
(c) Substituindo D = h na expressão da velocidade da pedra no instante em que ela
toca o solo, obtemos
~vq =
r
p
gh
ı̂ − 2gh ̂ .
2
(0.1)
Com isso, a razão entre os módulos de vqy e vqx é dada por
|vqy |
= 2.
|vqx |
(0.2)
Conseqüentemente, o ângulo entre ~vq e a horizontal é dado por
θ = arctan (|vqy |/|vqx |) = arctan(2) .
(0.3)
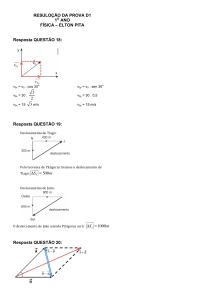
Na figura, a linha pontilhada representa a trajetória seguida pela pedra e, nela, estão
indicados ainda o ângulo θ, a velocidade ~vq , e as distâncias relevantes no problema.
Y
h
O
2.
D=h
q X √
2gh ̂
~vq = gh
2 ı̂ −
θ
(a) Por conveniência, escolheremos o instante em que o projétil é lançado como t0 =
0 e a origem dos eixos cartesianos no ponto de lançamento do projétil. Sabendo
que ~a = −g ̂, a função-velocidade e a função-movimento desse projétil são dadas,
respectivamente, por
~v = v0 cosθ0 ı̂ + (v0 senθ0 − gt) ̂
1 2
~r = (v0 cosθ0 ) t ı̂ + (v0 senθ0 ) t − gt ̂ .
2
(0.4)
(0.5)
0.1 Problemas correspondentes ao Capítulo 3
3
Usando o fato de que no instante t1 a componente vertical da velocidade do projétil
é nula, temos
v0 senθ0 − gt1 = 0
=⇒
t1 =
v0 senθ0
.
g
(0.6)
Não é difícil mostrar que t2 = 2t1 (o tempo de queda é o dobro do tempo de subida).
Assim, as posições do projétil nos instantes t1 e t2 são dadas, respectivamente, por
v 2 sen2 θ0
v02 senθ0 cosθ0
ı̂ + 0
̂ ,
g
2g
2v02 senθ0 cosθ0
ı̂ .
=
g
~r1 =
(0.7)
~r2
(0.8)
Conseqüentemente, o vetor deslocamento ∆~r = ~r2 − ~r1 será dado por
∆~r =
v02 senθ0 cosθ0
v 2 sen2 θ0
ı̂ − 0
̂ .
g
2g
(0.9)
(b) O vetor velocidade média é a razão entre o deslocamento ∆~r = ~r2 − ~r1 e o intervalo
de tempo ∆t = t2 − t1 . Como t2 = 2t1 , vemos que t2 − t1 = v0 senθ0 /g. Usando,
então, as expressões de ~r1 e ~r2 , dadas pelas equações (0.7) e (0.8), obtemos
h~v i[t1 , t2 ] =
v0 senθ0
∆~r
= v0 cos θ0 ı̂ −
̂
∆t
2
(0.10)
(c) Substituindo t = t1 e t = t2 em (0.4), obtemos as velocidade desejadas:
~v1 = v0 cos θ0 ı̂ ,
(0.11)
~v2 = v0 cos θ0 ı̂ − v0 senθ0 ̂ .
(0.12)
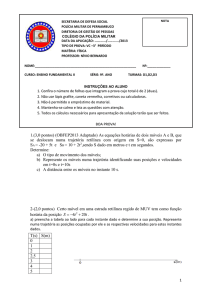
(d) A figura mostra a trajetória do projétil. Observe que, nela, marcamos as velocidades
~v0 , ~v1 e ~v2 , o vetor deslocamento entre os instantes t1 e t2 e a velocidade média
h~v i[t1 , t2 ].
0.1 Problemas correspondentes ao Capítulo 3
Y
4
~v1
h~v i[t1 , t2 ]
~v0
∆~r
O
3.
~v2
X
(a) As posições do pacote (P ) e da pessoa dentro do balão (B) são dadas, respectivamente, por (com unidades no SI)
xP = (1/40)t
e
yP = 340 − 5t2
(0.13)
xB = 200
e
yB = V t .
(0.14)
(b) Para que uma pessoa dentro do balão agarre o pacote, as suas coordenadas (xB , yB )
devem, em algum instante, designando por te , coincidir com as do pacote (xP , yP ).
De xP = xB , obtemos
1
te = 200
40
=⇒
te = 8 .
(0.15)
Substituindo te = 8 na expressão de yP , concluímos que a pessoa deve agarrar
o pacote a 20 metros do solo. Finalmente, forçando que yB = 20, chegamos à
conclusão de que a pessoa só será capaz de apanhar o pacote caso a velocidade do
balão seja V = 2, 5m/s.
4.
(a) Caso não houvesse gravidade, o projétil se moveria em movimento retilíneo uniforme, ao longo da reta caracterizada por y = x (z = 0), já que seu ângulo de
lançamento é 45o . A influência da gravidade faz com que, em lugar de um segmento de reta, o projétil descreva um arco de parábola, com concavidade voltada
para baixo. Conseqüentemente, supondo que a velocidade inicial do projétil seja
0.1 Problemas correspondentes ao Capítulo 3
5
finita atingirá o ponto P somente se h < d. O caso em que h = d seria atingido
apenas no limite em que v0 → ∞, como ficará evidente no próximo item.
(b) O movimento do projétil ocorre no plano OX Y. As coordenadas x e y do projétil
num instante qualquer após o seu lançamento são dadas por (sua coordenada z é
nula durante seu movimento)
√
2
x = v0
t
2
e
y = v0
√
2
1
t − gt2 .
2
2
(0.16)
Podemos encontrar a equação cartesiana de sua trajetória relacionando diretamente
√
as coordenadas x e y. Substituindo t = 2x/(v0 2) na expressão de y, obtemos
y =x−
gx2
.
v02
Impondo, então, que o projétil passe pelo ponto P , escrevemos
r
gd2
g
h=d− 2
.
=⇒ v0 = d
v0
d−h
(0.17)
(0.18)
Observe que para h > d não há raiz real. Isso significa que, caso h > d, o ponto
P (d, h, 0) nunca poderá ser atingido por um projétil lançado da origem com ângulo
de lançamento θ0 = 45o . Note,ainda, que se aumentarmos a altura h fazendo com
que ela tenda ao valor da distância d, vemos diretamente da equação anterior que
v0 → ∞. A interpretação desse resultado é simples: com uma velocidade infinita, o
tempo de percurso até o ponto P , que estaria exatamente na direção do lançamento
do projétil, tende a zero, de modo que a ação da gravidade se torna desprezível
durante o movimento do projétil.
(c) Para descobrirmos se no instante tP em que o projétil passa pelo ponto P ele está
subindo ou descendo, basta verificar o sinal da componente vertical de sua velocidade nesse instante, denotada por vyP . O instante tP pode ser calculado impondo
√
que xP = v0 ( 2/2)tP = d. Utilizando a equação (0.18), temos,
s
√
r
g
2
d−h
d
tP = d =⇒ tP = 2
.
(0.19)
d−h 2
2g
0.1 Problemas correspondentes ao Capítulo 3
6
√
De posse de tP , calculamos, então, vyP = v0 2/2−gtP . Substituindo as expressões
de v0 e tP e reescrevendo o resultado convenientemente, obtemos
r
2g
d
h−
.
vyP =
d−h
2
(0.20)
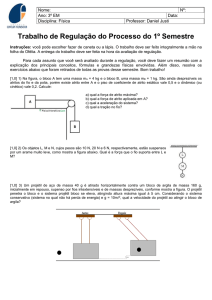
Uma rápida inspeção na equação anterior nos permite concluir que para 0 ≤ h < d/2
o projétil passa pelo ponto P descendo, pois nesse caso vyP < 0. Essa situação está
ilustrada na figura por uma linha contínua. Já para d/2 < h < d, o projétil passa
pelo ponto P na subida, pois vyP > 0, situação ilustrada na figura por uma linha
tracejada. Para h = d/2, o projétil atinge o ponto P no instante em que está em sua
altura máxima e, por esse motivo, é nula a componente vertical de sua velocidade,
ou seja, vyP = 0. Na figura, essa situação corresponde à linha pontilhada.
Y
h=
d
O
d
2
X
Vale a pena lembrar que para cada posição do ponto P , isto é, para cada valor de h
(d está fixa no problema) a velocidade de lançamento do projétil é diferente, tanto
maior quanto mais o valor de h se aproxima do valor de d.
5.
(a) Os movimentoS horizontal e vertical são independentes. As respectivas funçõesvelocidade são dadas por
vx = v0x + a t
,
vy = v0y − g t .
(0.21)
Note que o movimento vertical da partícula é idêntico ao movimento queda livre
usual. No ponto mais alto, a componente vertical da velocidade da partícula se anula
0.1 Problemas correspondentes ao Capítulo 3
7
(vy = 0). Com isso, utilizando a segunda equação escrita anteriormente, obtemos
para o tempo de subida ts :
tS =
v0y
.
g
(0.22)
(b) Como o movimento na vertical é o de queda livre, concluímos imediatamente que o
tempo de descida, tD , é idêntico ao de subida, isto é, tD = tS . Esse resultado não
depende do movimento horizontal da partícula.
(c) Durante a subida, o projétil percorre a distância horizontal
∆xS = fx (tS ) − fx (0)
2
1
v0y
v0y
= v0x
+ a
− 0
g
2
g
2
v0x v0y a v0y
+
.
=
g
2 g2
(0.23)
(d) Durante a descida, o projétil percorre a distância horizontal
∆xD = fx (2 tS ) − fx (tS )
2 #
2 " v0y
1
1
v0y
v0y
v0y
+ a 2
+ a
− v0x
= v0x 2
g
2
g
g
2
g
=
2
v0x v0y 3 a v0y
+
.
g
2 g2
Observe que a distância percorrida na descida é maior que a percorrida na subida.
Isso ocorre porque as velocidades horizontais da partícula durante a descida são
maiores que durante subida, como fica evidente se inspecionarmos a expressão de
vx (lembre-se de que vx0 e a são quantidades positivas).
6.
(a) Usando a definição de aceleração, temos
d~v
= ~a = −ax ı̂ − ay ̂
dt
=⇒
~v − ~v0 =
Z
t
0
(−ax ı̂ − ay ̂) dt ′ .
(0.24)
Realizando a integração e usando o fato de que ~v0 = v0x ı̂, obtemos
~v = (v0x − ax t)ı̂ − ay t̂ .
(0.25)
0.1 Problemas correspondentes ao Capítulo 3
8
Utilizando a definição de velocidade e integrando uma vez mais no tempo, obtemos
Z t
d~r
′
′
= ~v =⇒ ~r − ~r0 =
(v0x − ax t )ı̂ − ay t ̂ dt ′ ,
(0.26)
dt
0
ou seja,
~r =
1 2
1
v0x t − ax t ı̂ − ay t2 ̂ .
2
2
(0.27)
(b) Observe que em t = 0 a partícula se encontra na origem com uma velocidade cuja
componente ao longo de OX é positiva e com uma aceleração cuja componente ao
longo desse mesmo eixo é constante e negativa (v0x > 0 e ax < 0). Fica evidente,
portanto, que a componente vx da velocidade da partícula irá se anular e passará
a assumir valores negativos. Em outras palavras, o movimento na direção de OX
muda de sentido. Justamente quando vx = 0 a coordenada x da partícula é máxima.
Com isso, e utilizando os resultados do item anterior, obtemos
vx = 0 =⇒ v0x − ax t1 = 0 =⇒ t1 =
v0x
.
ax
(0.28)
A velocidade da partícula no instante t1 é dada por
~v1 = (v0x − ax t1 )ı̂ − ay t1 ̂ = −
ay v0x
̂ .
ax
(0.29)
(c) Como o produto escalar de dois vetores não-nulos só é nulo caso eles sejam perpendiculares entre si, podemos determinar o instante t2 impondo que ~v · ~a = 0:
(v0x − ax t2 )ı̂ − ay t2 ̂ · (−ax ı̂ − ay ̂) = 0 ,
(0.30)
ou seja,
−(v0x − ax t2 )ax + a2y t2 = 0
=⇒
t2 =
v0x ax
,
a2
(0.31)
onde a2 = a2x + a2y = |~a2 | é o módulo ao quadrado da aceleração da partícula.
(d) Como a aceleração é constante, a trajetória da partícula é parabólica, como no caso
do movimento de um projétil próximo à superfície terrestre se desprezarmos a resistência do ar. No entanto, como a aceleração nesse problema não é vertical, o eixo de
simetria dessa parábola está inclinado em relação à vertical. Para fazer o desenho da
0.1 Problemas correspondentes ao Capítulo 3
9
trajetória da partícula, escolhemos ax /ay = 2. É como se a aceleração da gravidade,
~g , tivesse girado no sentido horário de um ângulo cuja a tangente vale 2 (observe no
desenho à esquerda que o eixo de simetria da trajetória parabólica da partícula está
girado desse ângulo). Observe, ainda, que t2 < t1 . Para demonstrar esse resultado,
basta escrever
t2 =
v0x ax 2 ax 2
=
t1
ax a
a
(0.32)
e lembrar que a2x < a2 . Como a aceleração é constante, as setas representativas de
~a1 e ~a2 têm o mesmo módulo, direção e sentido. Lembre-se, finalmente, de que as
velocidades são sempre tangentes à trajetória. Verifique todas essas afirmativas na
figura à esquerda.
Y
X
O
~v0
~a2
α
~v2
~a1
~v2
~at2
~v1
Para finalizar este item, mostraremos um método um pouco mais geométrico de
determinar o instante t2 , no qual ~v e ~a são perpendiculares. Como a aceleração é
constante, podemos escrever
~v2 = ~v0 + ~at2 .
(0.33)
Uma vez que ~v2 e ~a devem ser perpendiculares, os três vetores ~v2 , ~v0 e ~at2 formam
um triângulo retângulo, com |~v0 | sendo a hipotenusa, como ilustra a figura à direita.
Uma rápida inspeção nessa figura nos permite escrever |~a|t2 = |~v0 |cosα = v0x cosα,
onde cosα = ax /|~a|. Das relações anteriores, obtemos, diretamente, t2 = v0x ax /a2 ,
de acordo com o cálculo anterior.
0.1 Problemas correspondentes ao Capítulo 3
10
7. As velocidades ~vA e ~vB têm o mesmo módulo e, portanto, devemos representá-las por
setas de mesmo tamanho. Além disso, devem ser tangentes à trajetória nos pontos A e
B, respectivamente. Os módulos das acelerações da partícula quando ela se encontra nos
pontos A e B são dados, respectivamente, por aA = va2 /r e aB = vB2 /R. Como vA = vB
e R = 2r, concluímos que aA = 2aB . Ou seja, devemos representar ~aA por uma seta com
o dobro do comprimento da seta representativa de ~aB . Além disso, como o movimento
nos semicírculos é circular uniforme, as acelerações são puramente centrípetas, ouseja,
apontam para os respectivos centros de curvatura. Finalmente, o deslocamento ∆~r[ta , tb ]
é dado por uma seta que vai de A para B. A figura contém todas as afirmativas anteriores.
~vB
~aB
B
∆~r[ta , tb ]
~vA
A
~aA
8. Por definição, a derivada temporal da velocidade escalar da partícula nos dá a componente
tangencial de sua aceleração, isto é,
dv
= aT = a0 cos(ωt) =⇒ vT − vT 0 =
dt
Z
t
cos(ωt ′ dt ′ =
0
a0
sen(ωt) ,
ω
(0.34)
ou seja,
a0
v=
ω
1 + cos(ωt) .
A componente normal ou centrípeta da aceleração da partícula é dada por
2
a20
v2
= 2
1 + cos(ωt) .
aN =
R
ω R
(0.35)
(0.36)
De posse das componentes aT e aN , obtemos facilmente o módulo da aceleração da partícula:
|~a| =
q
a2T
+
a2N
a2
= 20
ω R
2
ω R+
a20
1/2
2
2
.
cos (ωt) + a0 1 + 2 cos(ωt)
(0.37)
0.1 Problemas correspondentes ao Capítulo 3
9.
11
(a) A partícula A se movimenta de maneira periódica ao longo do eixo OY, permane-
cendo sempre entre as posições y1 = −R e y2 = R. A partícula B segue uma
trajetória circular no plano OX Y, de raio R e centro na origem, uma vez que
x2B + yB2 = R2 . Analisando a posição dessa partícula, não é difícil perceber que
ela se move no sentido anti-horário de quem observa o movimento de um ponto
localizado no semi-eixo positivo OZ.
(b) Para sabermos se as partículas se encontram ou não, devemos impor as condições
xA = xB e yA = yB e verificar se existe algum instante no qual tais condições sejam
satisfeitas. Impondo, então, essas condições, temos
0 = R cos(ω t)
e
R cos(ω t) = R sen (ω t)
(0.38)
Da primeira equação, vemos que ω t = (π/2) + π n, onde n é um inteiro qualquer.
Substituindo esses valores na segunda equação, obtemos
R cos
π
+ π n = R sen
+πn ,
2
2
π
isto é,
0 = R (−1)n ,
(0.39)
que é um resultado absurdo. Portanto, não há nenhum instante no qual as partículas
se encontrem.
(c) A figura da esquerda mostra apenas a trajetória circular da partícula B, de raio R
e centrada na origem, e a trajetória da partícula A, uma semi-reta entre os pontos
(0, −R) e (0, R). Para facilitar a visualização da trajetória da partícula A, não desenhamos nessa figura o eixo OY.
A figura do centro mostra a situação no instante t1 = π/2ω. Como o movimento de B é circular uniforme, sua aceleração aponta em qualquer instante para o
centro do círculo e tem módulo constante. Obviamente sua velocidade é tangente
ao círculo. Nesse instante, a partícula A está na origem com velocidade máxima
e aceleração nula. Note que a o módulo de sua velocidade nesse instante coincide
com o módulo da velocidade da partícula B em qualquer instante (verifique esse
resultado a partir das respectivas funções-movimento das partículas).
0.1 Problemas correspondentes ao Capítulo 3
12
Finalmente, a figura da direita mostra a situação no instante t2 = π/ω. Nesse
instante, a partícula A tem velocidade nula mas aceleração máxima. Não é difícil
mostrar que o módulo de sua aceleração nesse instante coincide com o módulo da
aceleração da partícula B em qualquer instante. Confira nas figuras as afirmativas
anteriores.
Y
~vB1
B
Y
~aB1
A
~aB2
X
~aA1 = ~0
~vA1
X
~aA2
~vB2
t1 =
Trajetórias
10.
π
2ω
X
t2 =
~vA2 = ~0
π
ω
(a) A posição do barco B relativa ao barco A é dada por
~rB′ = ~rB − ~rA .
(0.40)
Usando as posições dos barcos, obtemos
~rB′ = [(120 − t)ı̂ + 5t̂] − [tı̂ + 5t̂] = (120 − 2t)ı̂ .
(0.41)
Derivando essa expressão em relação ao tempo, obtemos a velocidade do barco B
relativa ao barco A,
~vB′ = −2 ı̂ .
(0.42)
(b) Do item anterior, temos ~rB′ = (120 − 2t)ı̂. Os barcos se chocaãão se, e somente se,
a posição do barco B relativa ao barco A se anular para algum instante de tempo,
isto é, se ~rB′ = 0. Portanto, os barcos se chocarão se, e somente se, 120 − 2t = 0, o
que nos permite concluir que os dois barcos se chocarão em t = 60 s.
0.1 Problemas correspondentes ao Capítulo 3
13
11. Designemos por R o referencial solidário ao edifício com origem no primeiro andar e R ′
o referencial solidário ao elevador com origem no piso do mesmo.
(a) No referencial R o parafuso tem, inicialmente, a velocidade do elevador, ou seja,
vz0 = v0 . Nesse mesmo instante, no referencial R ′ , o parafuso tem velocidade nula,
′
isto é, vz0
= 0.
(b) No referencial R o movimento é o de queda livre usual:
vz = vz0 − gt
(0.43)
1
z = H + vz0 t − gt2 .
2
(0.44)
Para descobrirmos o movimento relativo ao referencial R ′ , basta relacionar z, z ′ e
Z, onde Z é a posição do piso do elevador (origem de R ′ ) em relação ao referencial
R. Observando que a posição (vertical) do parafuso em relação a R é a soma de sua
posição relativa a R ′ com a posição da origem de R ′ em relação a R, é imediato
escrever
z = z′ + Z
=⇒
vz = vz′ + Vz
=⇒
az = az′ + Az .
(0.45)
Como o movimento do piso do elevador é uniformemente acelerado com Az = a
e tem velocidade inicial Vz0 = v0 e posição inicial Z0 = 0 (no instante inicial o
elevador está no primeiro andar), temos
1
Z = v0 t + at2
2
=⇒ Vz = v0 + at
=⇒
Az = a .
(0.46)
Utilizando os últimos resultados nas expressões escritas em (0.45), obtemos a funçãomovimento e a velocidade do parafuso relativamente ao referencial R ′ :
1
1 2
1 2
′
=⇒ z ′ = H − (g + a)t2 ;
z = H + v0 t − gt − v0 t + at
2
2
2
vz′ = v0 − gt − (v0 + at)
=⇒
vz′ = −(g + a)t .
(0.47)
Observe que no referencial R ′ tudo se passa como se tivéssemos uma aceleração da
gravidade efetiva de módulo igual a (g + a)
0.1 Problemas correspondentes ao Capítulo 3
14
(c) No referencial do elevador o parafuso se choca com o piso no instante tc para o qual
z ′ = 0. Temos, então,
1
0 = H − (g + a)t2c
2
=⇒
tc =
s
2H
.
g+a
(0.48)
(d) No referencial do elevador o deslocamento, obviamente, é dado por
∆z ′ = 0 − H = −H.
(0.49)
Para obtermos o deslocamento no referencial R, basta calcularmos a posição do
parafuso em tc e subtrairmos do resultado encontrado a posição inicial, ou seja,
s
gH
2H
−
.
(0.50)
∆z = v0
g+a g+a
(e) Para encontrarmos os resultados desejados, isto é, as velocidades vzc e vz′c no instante
p
do choque com o piso do elevador, basta substituirmos o valor tc = 2H/(g + a)
nas respectivas funções-velocidade para cada referencial, obtendo, dessa forma:
s
2H
(0.51)
vzc = v0 − g
g+a
vz′c = −
12.
p
2H(g + a)
(0.52)
(a) A velocidade e a aceleração do ponto P são obtidas, respectivamente, derivando-se
uma e duas vezes a sua função-movimento em relação ao tempo. Lembrando que
~r ′ = a sen(ωt) ı̂ + cos(ωt) ̂ , obtemos
~v ′ =
d~r ′
= ωa[cos(ωt) hatı − sen(ωt) ̂]
dt
(0.53)
~a ′ =
d2~r ′
= − ω 2 a[sen(ωt) ı̂ + cos(ωt) ̂] .
dt2
(0.54)
(b) A equação cartesiana da trajetória de P em relação ao referencial R ′ é determinada
pela relação entre as coordenadas x ′ e y ′ desse ponto num instante qualquer. A
partir da expressão de ~r ′ , é imediato escrever x ′ 2 + y ′ 2 = a2 , o que nos permite
0.1 Problemas correspondentes ao Capítulo 3
15
concluir que, nesse referencial, a trajetória de P é circular, de centro em O ′ e de
raio a. Vale a pena observar que se compararmos as expressões de ~a ′ e ~r ′ vemos
que ~a ′ = −ω 2 ~r ′ , expressão conhecida para a aceleração centrípeta num movimento
circular uniforme.
Para calcularmos a velocidade e a aceleração de P no instante t1 = 3π/2ω
basta substituir esse valor nas expressões anteriores para ~v ′ e ~a ′ . Obtemos, então,
~v1′ = ωa ̂
e
~a1′ = ω 2 a ı̂
A trajetória de P e os vetores ~v1′ e ~a1′ estão mostrados na figura abaixo. Pelo sentido
de ~v1′ vemos que o movimento tem sentido horário.
~v1′
a
~a1′
O
′
(c) O vetor-posição de P relativo ao referencial R é dado por
~r = ~rO ′ + ~r ′ ,
onde ~rO ′ é o vetor-posição da origem O ′ relativo a R. Como O ′ descreve um
movimento retilíneo uniforme com velocidade V~ = ωa ı̂ e em t = 0 coincide com a
origem O, temos ~rO ′ = ωa t ı̂. Utilizando a expressão de ~r ′ obtemos,
~r = ωa t ı̂ + a sen(ωt) ı̂ + cos(ωt) ̂
~r = a ωt + sen(ωt) ı̂ + a cos(ωt) ̂ .
0.1 Problemas correspondentes ao Capítulo 3
16
A velocidade e a aceleração de P em relação a R são obtidas, respectivamente,
derivando-se uma e duas vezes a função-movimento anterior. Obtemos,
nh
i
o
d~r
= ωa 1 + cos(ωt) ı̂ − sen(ωt) ̂
dt
h
i
d2~r
2
=
−
ω
a
sen(ωt)
ı̂
+
cos(ωt)
̂
.
~a =
dt2
~v =
(0.55)
(0.56)
Note que ~a = ~a ′ , como esperado, pois a aceleração de uma partícula é a mesma em
dois referenciais inerciais diferentes (no caso, os referenciais R e R ′ ).
(d) Da expressão de ~v , temos vx = ωa 1 + cos(ωt) . Uma vez que −1 ≤ cos(ωt) ≤ 1,
fica evidente que vx ≥ 0. Os instantes em que vx = 0 são aqueles para os quais
cos(ωt) = −1, ou seja, ωtn = (2n + 1)π/2, com n um inteiro qualquer.
Como vy = ωa sen(ωt) e sen[(2n + 1)π] = 0, concluímos que vy também se
anula nesses instantes. Ou seja, nos instantes tn temos ~v = 0.
(e) O movimento de P relativo a R é dado pela composição de um movimento circular uniforme com um movimento retilíneo uniforme. As equações paramétricas da
trajetória desse ponto são dadas por
x = a ωt + sen(ωt)
y = a cos(ωt)
A velocidade de P quando toca o solo é nula. No instante t1 = π/ω o ponto P está
em contato com o solo. Nesse caso, temos ~v1 = 0 e ~a1 = ω 2 a ̂. Já no instante
t2 = 2π/ω o ponto P está num ponto onde a altura relativa ao solo é máxima
(há vários pontos da trajetória onde isso acontece). Nesse caso, temos ~v2 = 2ωa ı̂
e ~a2 = −ω 2 a ̂. A trajetória e todos esses vetores (exceto ~v1 por ser nulo) estão
indicados na figura abaixo.
0.1 Problemas correspondentes ao Capítulo 3
17
Y
~a1
~v2
O
~v1 = 0
13.
X
~a2
(a) Para que a trajetória do projétil relativa ao referencial R ′ seja retilínea, devemos
escolher Vx de modo que a componente horizontal da velocidade do projétil relativa
a esse referencial seja nula, isto é, vx′ = vx − Vx = 0. Como vx = v0x , concluímos
que Vx = v0x . Com isso, a velocidade do projétil relativa a R ′ é dada por
~v ′ = ~v − V~ = [v0x ı̂ + (v0y − gt)̂] − v0x ı̂ = (v0y − gt)̂ .
(0.57)
Note que vy′ = vy = v0y − gt. Integrando no tempo a equação anterior, obtemos
1 2
′
(0.58)
~r = v0y t − gt ̂ .
2
2
Como a altura máxima atingida pelo projétil nesse movimento é v0y
/2g, a sua traje2
tória é dada pelo segmento de reta que vai da origem ao ponto (0, v0y
/2g).
(b) O vetor-posição do projétil relativo a R ′ é dado por ~r ′ = ~r −~rO ′ , onde ~rO ′ é o vetor
posição da origem O ′ relativa ao referencial R. Usando o fato de que Vx = v0x /2
e, portanto, ~rO′ = Vx t ı̂ = (v0x /2)t ı̂, obtemos
v0x
1 2
′
t ı̂
~r = v0x t ı̂ + v0y t − gt ̂ −
2 2
v0x
1
=
t ı̂ + v0y t − gt2 ̂ .
2
2
(0.59)
A única diferença em relação à expressão de ~r, é que v0x é trocada por v0x /2. Conseqüentemente, o movimento vertical do projétil é o mesmo que o observado em R,
com o mesmo tempo de vôo. Apenas o alcance visto de R ′ será a metade do alcance
observado em R. Portanto, a trajetória do projétil relativa a R ′ é uma parábola mais
“estreita”, como indica a figura
0.1 Problemas correspondentes ao Capítulo 3
18
Y′
~v0′
X′
O′
(c) Supondo agora que Vx = −v0x , é imediato mostrar que o vetor-posição do projétil
relativo a R ′ é dado por ~r ′ = −v0x t ı̂ + (v0y t − (1/2)gt2 )̂. Note que a única
diferença em relação à expressão de ~r é que, agora, v0x está trocada por −v0x , ou
seja, o projétil se movimenta horizontalmente em sentido oposto ao observado de
R. Desse modo, a trajetória do projétil vista de R ′ será uma parábola obtida pela
imagem daquela relativa a R supondo que o eixo O ′ Y ′ seja um espelho plano, como
indica a figura
Y′
~v0′
O′
X′