SISTEMA MECATRÔNICO DE AUXÍLIO A AMPUTADOS
Nome do(s) Bolsista(s): Gabriel da Costa Florisbal Matheus Henrique Ramos Lemos – Escolaridade: 4º
Ano do Ensino Técnico Integrado1
Nome do Tutor: Juliano Costa Machado1, Nome do Orientador: Juliano Costa Machado 2
1
IFSul – Campus Charqueadas / IFSul – Campus Charqueadas
Rua General Balbão, 81 – Bairro Centro
96745000 – Charqueadas – RS
2
IFSul – Campus Charqueadas
Rua General Balbão, 81 – Bairro Centro
96745000 – Charqueadas – RS
Resumo A tecnologia assistiva é uma área que vem se
destacando muito, pois visa, de alguma maneira, melhorar a
vida dos deficientes físicos. O presente trabalho, também nesta
área, refere-se a construção de uma prótese controlada por
sinais musculares, captados por eletrodos não-invasivos
localizados nos membros superiores. Esses sinais serão
posteriormente processados de forma digital para o controle da
prótese.
Palavras Chaves: Eletromiógrafo; Tecnologia Assistiva;
Mioelétrico; Prótese
Abstract: Assistive technology is an area that has stood out too
much, as intended, in any way, improve the lives of disabled
people. The present work also in this area relates to the
construction of a prosthetic controlled by muscle signals,
obtained by non-invasive electrodes located in the upper limbs.
These signals are further processed digitally to control the
prosthesis.
Keywords:
Electromyograph;
Myoelectric; prosthesis.
1
Assistive
Technology;
INTRODUÇÃO
A necessidade de ajudar e melhorar a vida dos deficientes
físicos faz dos projetos de tecnologia assistiva uma importante
ferramenta de inclusão social. O principal impacto potencial do
projeto é a inclusão social dos deficientes físicos, através de
uma prótese controlada por sinais musculares que proporciona
uma maior autonomia ao usuário, facilitando a realização de
tarefas cotidianas.
Este projeto focará no desenvolvimento de um sistema
de aquisição e processamento do sinal mioelétrico para o
controle de um protótipo de prótese. Existem projetos similares
ao proposto, sempre com o mesmo princípio de
funcionamento: os eletrodos captam os sinais mioelétricos,
quando ocorre contração muscular, o eletromiógrafo amplifica
e filtra esses sinais e a plataforma de desenvolvimento Arduino
Mega é responsável pela conversão analógico-digital (AD)
para que o sinal possa ser analisado digitalmente,
possibilitando a criação das redes neurais, algoritmos que
controlarão o protótipo de prótese.
2
O TRABALHO PROPOSTO
O desenvolvimento do presente projeto facilita a
prática das atividades diárias dos deficientes físicos, pois a
acionamento do protótipo é realizado atráves de um sinal
muscular, não necessitando de qualquer posicionamento
mecânico prévio. Essa característica ajuda e melhora a vida dos
deficientes físicos, atuando como uma importante ferramenta
de inclusão social.
Na atualidade ainda não se chegou a um modelo
preciso e funcional, sendo, então, alvo de muita pesquisa neste
campo da tecnologia assistiva. Um dos grandes problemas
encontrados nos sistemas desenvolvidos é o alto custo dos
softwares e hardwares envolvidos nas pesquisas. Este projeto
busca o desenvolvimento de uma plataforma de leitura de
sinais mioelétricos (sinais musculares) integrada a um sistema
de processamento de sinais digitais, no caso o Arduino Mega.
Sabemos que sinais musculares, chamados de sinais
mioelétricos, representam a contração muscular e
consequentemente a intenção de realizar movimento. O sinal
mioelétrico tem uma resposta elétrica muito alta, comparada a
outros sinais bioelétricos (tal como o sinal proveniente do
cérebro ou do coração), sendo, portanto, um sinal de fácil
captura de forma não invasiva, necessitando apenas de um
conjunto de eletrodos de superfície, amplificadores e filtros. Os
sinais mioelétricos possuem tensão que variam de 100 µV a 2
mV (RICCIOTTI, 2006). Na Foto 1, pode-se ver um exemplo
de eletrodo:
Mostra Nacional de Robótica (MNR)
1
Figura 1: Eletrodos não-invasivos Fonte: Autoria
própria
O desenvolvimento de um eletromiógrafo também
permite pesquisas futuras tanto na área de tecnologia assistiva,
como na área da saúde, avaliando o comportamento muscular
diante de lesões e fadigas excessivas.
Devido ao fato de que estes equipamentos deverão ser
portáveis ao usuário, é de fundamental importância que a
conversão para forma digital do sinal muscular e seu
processamento sejam o mais reduzido possível. Para este fim
será utilizado a plataforma de desenvolvimento Arduino Mega.
O uso de um sistema utilizando o Arduino Mega traz diversas
vantagens, como a rápida conversão de analógico para digital
do sinal elétrico, além de trazer uma central de processamento
de sinais, que permite o processamento em tempo real sem a
necessidade de um microcomputador. Além disso, o Arduino
Mega é uma plataforma simples e barata, comparadas a outras
com características semelhantes.
Uma rede neural artificial será responsável pela
“tradução” do sinal elétrico, de um conjunto de músculos, em
alguma ação (movimento de uma prótese, por exemplo). Redes
neurais são algoritmos computacionais altamente adaptativos
ao usuário. É sempre bom salientar a variabilidade de qualquer
sinal bioelétrico entre indivíduos, sendo que alguns podem
apresentar baixa atividade elétrica muscular, enquanto outros
podem apresentar uma forte atividade. Dessa forma, uma rede
neural, que é formada por camadas de neurônios artificiais
chamados de percéptons, tem a capacidade de se adaptar a esta
variabilidade através de sessões de treinamento (FAVIEIRO,
2009).
3
MATERIAIS E MÉTODOS
Este projeto está pautado nas seguintes etapas
descritas em seguida:
Construção do eletromiógrafo: para o desenvolvimento
do eletromiógrafo serão necessários componentes encontrados
comumente no mercado eletrônico brasileiro, tais como:
amplificadores operacionais, amplificadores de instrumentação,
resistores, capacitores, além dos eletrodos de superfície, que
estão disponíveis em lojas do ramo médico-hospitalar.
Validação do eletromiógrafo: será realizada através da
injeção de sinais elétricos conhecidos (como senóides com
frequências e amplitudes conhecidas, utilizando geradores de
sinais) e analisada a saída para verificar: a) o comportamento
dos filtros; b) o comportamento dos amplificadores; c) o
comportamento do estágio de saída.
Desenvolvimento do software de aquisição digital do
sinal mioelétrico: este software levará em consideração as
características de tensão/frequência do sinal mioelétrico. Após
isso, o software será validado, realizando a conversão digital de
sinais conhecidos com características parecidas com o do sinal
mioelétrico. A partir desse ponto é possível já realizar a
Mostra Nacional de Robótica (MNR)
implementação da rede neural no Arduino Mega. Utilizando
dados conhecidos, é possível testar o comportamento da rede
neural implementada.
Treinamento usuário/sistema: a técnica a ser
desenvolvida para o treinamento será baseada em trabalhos
desenvolvidos na área. Eles consistem em repetições de
movimentos e armazenamento dos dados desses movimentos.
Após isso, esses dados são inseridos na rede neural e dessa
forma ela “aprende” através dos dados adquiridos previamente
do usuário. Enquanto o usuário também se adapta a forma de
aprendizagem do sistema, melhorando o desempenho com o
passar do tempo.
Teste da eficiência do protótipo: após o treinamento da
rede, o usuário tentará movimentar um protótipo de prótese
com no mínimo dois tipos de movimentos diferentes, aonde ele
ativará a prótese apenas utilizando os sinais provenientes de
seus músculos.
4
RESULTADOS E DISCUSSÃO
Conforme mencionado anteriormente, nosso projeto
consiste em uma prótese controlada por sinais mioelétricos.
Desta forma, precisamos construir um protótipo de prótese,
com dedos, mão e braço. Pesquisamos modelos de próteses e
através de conversas com os nossos colaboradores da APAE,
percebemos que o movimento mais importante seria o de abrir
e fechar a mão, como espécie de uma garra. Logo adquirimos
uma garra mecânica composta por um motor servo para
principalmente testes, conforme segue imagem:
Figura 2: Simulação da garra
Fonte: Autoria própria
Após isso criamos nosso próprio modelo de prótese
que posteriormente será fabricado em uma impressora 3D, para
que isso fosse possível fizemos todos os desenhos no software
SolidWorks, que tem compatibilidade com grande parte das
impressoras deste tipo. O movimento principal do protótipo de
prótese (movimento de abrir e fechar da mão) necessita de
apenas um servo motor para ser movimentado, o que se torna
interessante levando em conta o aspecto financeiro e o ponto de
vista que para ser funcional o protótipo deve ser leve.
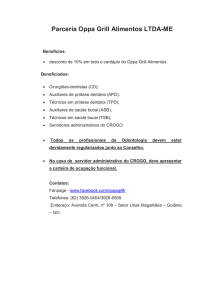
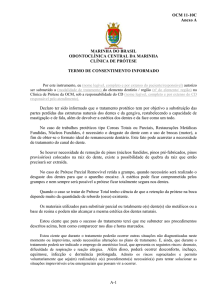
Cada peça de um dedo é composta principalmente de
encaixes e um furo para passar o fio que é basicamente o
esquema que puxará as outras peças compostas por cada dedo,
sendo puxadas por um eixo dentro da ‘mão’, no protótipo
também existirão molas para deixarem os dedos firmes quando
a prótese estiver aberta. Todas as peças da prótese foram
baseadas em uma mão real, visando uma melhor aparência e
qualidades.
Figura 3: Detalhes da peça base dos dedos
Fonte: Autoria própria
Figura 4: Montagem de um dos dedos
Fonte: Autoria própria
Desenvolvemos um filtro passa-baixa de
segunda ordem, com frequência de corte em 750 Hz,
já que filtros passa-baixa permitem que a tensão
abaixo da frequência de corte passe sem perdas,
cascateado com um filtro passa-alta, também de
segunda ordem, com frequência de corte em 80 Hz,
possibilitando que quando a frequência for maior que
80 Hz a tensão passe sem perda. A definição da
frequência de corte do filtro passa-alta levou em
consideração a possibilidade da interferência da rede
elétrica (60 Hz). Com a frequência de corte
estabelecida, qualquer interferência abaixo de 80 Hz
não é percebida. A ordem do filtro se refere a
quantidade de capacitores que este possui.
Utilizamos o software FilterPro, da Texas
Instruments, para projetar o circuito. Este programa,
após receber alguns parâmetros (frequência de corte,
ganho, tipo de filtro, etc.) fornece o esquemático
eletrônico do projeto, com os valores nominais de
cada
componente
(INSTRUMENTS,
2013).
Utilizamos o modelo de Filtro Butterworth, com
ganho de tensão igual a 1.
Após as montagens dos dedos desenhamos a mão e o
braço, pensando também numa maior proximidade de um
braço de uma pessoa, e obtivemos o seguinte resultado final
após a montagem completa:
Figura 6: Filtro Passa-Alta projetado no software FilterPro
Fonte: Autoria própria
Figura 5: Montagem Completa da Prótese
Fonte: Autoria própria
O projeto eletrônico basicamente será voltado para o
desenvolvimento de eletromiógrafos, circuitos compostos
basicamente por amplificadores e filtros que possibilitam a
análise de sinais mioelétricos. Desenvolveremos também
shield, placa que será plugada no Arduino Mega com a
finalidade de propiciar mais funcionalidade e segurança para
sistema eletrônico.
A parte eletrônica iniciou pelo desenvolvimento do conjunto de
filtros para o eletromiógrafo. Sinais musculares possuem
frequências que oscilam entre 80 e 750 Hz. Por este motivo,
torna-se indispensável a construção de filtros para minimizar
características indesejadas da frequência, efeitos do ruído gerados
pelo sinal mioelétrico (MALVINO, 1997).
Figura 7: Filtro Passa-Baixa projetado no software FilterPro
Fonte: Autoria própria
Também usamos filtros passa-alta na saída dos
amplificadores para eliminar as interferências das baixas
frequências.
Os sinais mioelétricos possuem amplitude muito
baixa o que impossibilita análises digitais. Para ampliar a
tensão proveniente dos eletrodos, quando houver contração
muscular, utilizamos o amplificador de instrumentação
INA118, que possui boa precisão e também é amplamente
utilizada na instrumentação médica (MALVINO, 2007). O
circuito integrado do INA118 é composto por 3 amplificadores
operacionais, que amplificam a diferença entre suas entradas
(Vin+ e Vin-). Como a amplitude do sinal mioelétrico é muito
baixa, varia de 100 µV a 2 mV, precisamos de um ganho de
1000 vezes da tensão de entrada. Como o retificador possui
ganho 2 e as tensões do amplificador e retificador são
multiplicadas, projetamos o amplificador com ganho de 500. O
ganho do amplificador (G) neste circuito integrado é
determinado por um resistor, denominado resistor de ganho
(RG), que pode ser calculado através da fórmula:
(1)
G = 1 + 50 K
RG
RG = 1 + 50K ≈ 100 ohms
500
Mostra Nacional de Robótica (MNR)
3
O DRL - circuito da perna direita - é muito utilizado
em amplificadores que captam sinais biológicos, como ECG
(Eletrocardiograma), EEG (Eletroencefalograma) ou circuitos
EMG (caso do nosso projeto). Tem a função de reduzir a
interferência de modo comum. Os amplificadores captam sinais
elétricos muito baixos que, se tiverem interferência, não serão
percebidos. O DRL anula o ruído e interferências que podem
ser causadas pelo fato do corpo funcionar como antena, que
ocorre quando o corpo capta outros sinais, como o sinal de uma
rede elétrica, por exemplo. Resumindo, o Right-Leg Drive
elimina as interferências que podem prejudicar a percepção do
sinal corporal a ser amplificado. O circuito DRL usado é do
datasheed do amplificador de instrumentação INA118.
Figura 8: Circuito Right-Leg Drive
Fonte: SatSleuth GPS Tracking Systems
O circuito será alimentado por uma fonte simétrica
composta por duas baterias lipo de 12 Volts e 1300 mA/h
ligadas em série. O pólo negativo de uma bateria é ligado no
pólo positivo da outra, neste ponto temos o GND (terra). Desta
forma, teremos +12 Volts, -12 Volts e GND (terra). Usaremos
uma fonte simétrica para podermos amplificar tanto sinais de
ordem negativa quanto positiva. Devido à necessidade do
sistema ser portátil e leve foi escolhido este tipo de alimentação
utilizando baterias, que possuem pouco peso e são
relativamente pequenas.
Figura 9: Esquema de Baterias de 9 Volts em série
Fonte: Autoria própria
Os sinais mioelétricos, como citado anteriormente,
possuem amplitude de 100 μV a 2 mV. Devido a essa
variabilidade, precisamos desenvolver um circuito para ajustar
o estágio amplificação do eletromiógrafo, adaptando o sistema
a cada usuário. Algumas pessoas possuem atividade muscular
maior, desta forma o ganho poderá ser menor, diferentemente
das pessoas que possuem baixa amplitude de sinal mioelétrico
e necessitarão de um ganho elevado. O circuito do ajuste de
ganho será desenvolvido utilizando o amplificador operacional
de alta precisão (OPA4227) configurado como não-inversor,
onde um trimpot de 100 K possibilitará o ajuste de ganho. A
saída do amplificador INA 118 é conectada a entrada positiva
do OPA4227. O ganho do circuito pode ser ajustado de 20 a
1000 vezes.
Mostra Nacional de Robótica (MNR)
Figura 10: Ajuste de Ganho
Fonte: Autoria própria
Os sinais mioelétricos possuem amplitude negativa e
positiva. A parte negativa precisa ser transformada em positiva,
para evitar danos a plataforma Arduino Mega. O retificador é
dito de precisão, pois não há perde de tensão, característica dos
retificadores. Se o sinal mioelétrico for 2 mVpp, sem o
retificador apenas 1mV seria positivo. Com o retificador, todo
o sinal será positivo e poderá ser processado digitalmente pelo
Arduino Mega. O retificador possui ganho 2, porém esse ganho
será não influenciará, visto que implementaremos um ajuste de
ganho no circuito.
Figura 11: Retificador de Precisão de Onda Completa
Fonte: Autoria Própria
Figura 12: Esquemático de um dos três
eletromiógrafos
Fonte: Autoria Própria
Como ainda não estamos utilizando redes neurais, nos
baseamos na função Serial.println para criar o algoritmo de
controle do dispositivo mecânico (garra). Com essa função
sabemos os valores musculares que chegam em uma porta
analógica através de amostras apresentadas pelo software no
computador (valor de tensão do músculo em atividade ou em
repouso e controlar a frequência com que há variações quando
tem atividade muscular). A partir disso, utilizamos um
algoritmo básico baseado em estruturas como if e while, onde o
protótipo é acionado quando ocorre uma contração e
desativado quando o músculo entra em repouso.
Adicionamos um circuito, que varia a tensão de 5 a 9
Volts, para somar com a tensão de saída do eletromiógrafo e
eliminar a tensão negativa gerada quando ocorre uma contração
muscular. Desta forma, evitamos que o Arduino Mega seja
danificado.
Figura 15: Músculo em repouso
Fonte: Autoria própria
Figura 14: Algoritmo de Controle do Protótipo
Fonte: Autoria Própria
Até o momento, conseguimos os seguintes resultados:
Construções dos filtros (passa alta e passa baixa):
concluídas:
Montagem do amplificador de instrumentação:
concluída;
Análise da saída dos sinais conhecidos: concluída;
Pesquisas sobre modelos de garras: concluídas;
Construções das peças que constituem a garra: em
andamento;
Construção do circuito Right-Leg Drive (DRL):
concluída;
Projeto da alimentação do circuito: concluída;
Construção do 1º eletromiógrafo: concluída;
Testes com eletrodos: concluídos.
Percepção do sinal mioelétrico captado pelos
eletrodos, amplificado e filtrado pelo eletromiógrafo:
concluída;
Criação das redes neurais: em andamento;
Réplicas e melhorias do 1º eletromiógrafo: em
andamento.
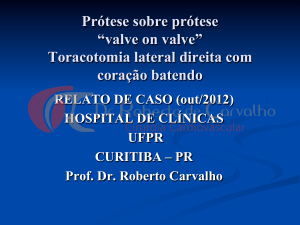
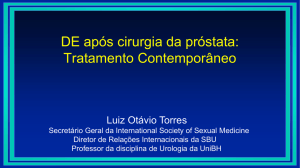
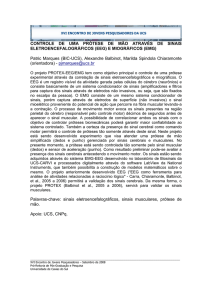
O resultado mais significativo até o momento foi a
percepção do sinal mioelétrico no momento da contração
muscular. Utilizamos um osciloscópio – um dos canais foi
conectado no terra e o outro na saída do eletromiógrafo – para
analisar o comportamento do sistema eletrônico. Sem
contração, a onda de saída do osciloscópio era estável. No
momento em que ocorria uma contração, a onda apresentava
uma variação de amplitude.
Figura 16: Músculo contraído
Fonte: Autoria Própria
5
CONCLUSÕES
Com o avanço na área da mecatrônica podemos concluir
que é possível construir um protótipo de prótese controlada por
sinais mioelétricos (musculares), com um valor acessível para
qualquer pessoa. Além disso, em testes utilizando os eletrodos
e o eletromiógrafo, conseguimos perceber a variação da
amplitude da tensão quando ocorria uma contração muscular.
Essa variação será percebida pelas redes neurais, que
controlarão o protótipo de prótese. Além disso, com a
realização do projeto pretendemos melhorar a autoestima dos
deficientes físicos, utilizando o protótipo como mecanismo de
inclusão social.
REFERÊNCIAS BIBLIOGRÁFICAS
FAVIEIRO, G. Controle de uma prótese experimental do
segmento mão-braço por sinais mioelétricos e redes
neurais artificiais. 2009. 111 pg. Trabalho de Conclusão
de curso (Graduação). Universidade Federal do Rio
Grande do Sul, Porto Alegre, dezembro de 2009.
INSTRUMENTS, T. ACTIVE FILTER DESIGN
APPLICATION. DISPONÍVEL EM:
<HTTP://WWW.TI.COM/TOOL/FILTERPRO>.ACES
SO EM MAIO DE 2013.
MALVINO, Albert Paul. Eletrônica. Volume 2. 4ª edição. São
Paulo: Pearson Makron Books, 1997. 558 p.
Mostra Nacional de Robótica (MNR)
5
MALVINO, Albert Paul; BATES, David J. Eletrônica.
Volume 2. 7ª edição. São Paulo: McGraw-Hill, 2007.
672 p.
RICCIOTTI, Duarte. Utilização de Wavelets no processamento
de sinais EMG. 2006. Trabalho de Conclusão de Curso
(Pós-Graduação
em
Engenharia
Elétrica)
–
Universidade Federal de Uberlândia.
SYSTEMS, SatSleuth GPS Tracking. Electronic Circuits.
Disponível
<http://www.electronicsteacher.com/circuits-anddiagrams/medical-and-health-relatedschematics/r24.gif>. Acesso em: Agosto de 2013.
Mostra Nacional de Robótica (MNR)
em: