Física Geral I
1º semestre - 2004/05
3 ◦ T ESTE DE AVALIAÇÃO
2668 - E NSINO DE F ÍSICA E Q UÍMICA
1487 - O PTOMETRIA E O PTOTECNIA - F ÍSICA A PLICADA
12 de Janeiro 2005
• Duração: 2 horas + 30 min tolerância
• Nas primeiras seis perguntas de escolha múltipla, indique apenas uma das opções.
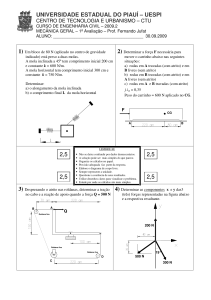
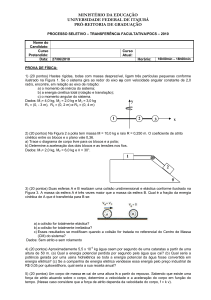
M OMENTOS DE I NÉRCIA DE ALGUNS SÓLIDOS , RELATIVAMENTE AOS EIXOS INDICADOS
R1
R
R
L
R
R2
L
R
Anel em torno do eixo Anel em torno dum eixo Cilindro oco em torno do Cilindro maciço em torno do Cilindro maciço em torno
de simetria cilíndrica ao longo do diâmetro
dum eixo que passa pelo
eixo de simetria cilíndrica eixo de simetria cilíndrica
diâmetro central
1
2
MR
2
MR2
1 MR 2+ 1 ML2
12
4
1 MR2
2
1 M(R 2 + R 2 )
1
2
2
L
L
b
2R
2R
a
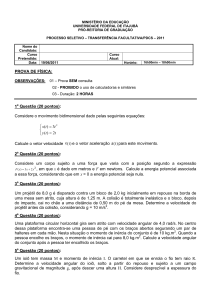
Esfera oca fina em
torno dum eixo que
passa pelo centro
2
2
MR
3
Esfera maciça em torno
dum eixo que passa pelo
centro
2 MR2
5
Barra fina em torno dum
eixo ¦ ao comprimento e
que passa pelo centro
1
2
MR
12
Placa rectangular em
Barra fina em torno dum
torno do eixo ¦ que
eixo ¦ ao comprimento e
que passa pela extremidade passa pelo centro
1 MR2
3
2
1
M(a 2+ b )
12
Teste de Avaliação - 3
12.Janeiro.2005
F ÍSICA G ERAL I
UBI
1
C ONSTANTES F ÍSICAS E OUTROS DADOS
Constante
velocidade da luz no vácuo
unidade de massa atómica
constante de Avogadro
massa do electrão em repouso
massa do protão em repouso
massa do neutrão em repouso
aceleração da gravidade à superfície da Terra
massa da Terra
raio médio da Terra
Símbolo
c
u
NA
me
mp
mn
g
Valor
3, 00 × 108 m/s
1, 66 × 10−27 kg
6, 02 × 1023
9, 11 × 10−31 kg
1, 67 × 10−27 kg
1, 67 × 10−27 kg
9, 81 m/s2
5, 98 × 1024 kg
6, 37 × 106 m
E SCOLHA M ÚLTIPLA
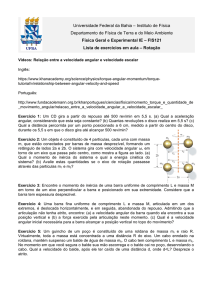
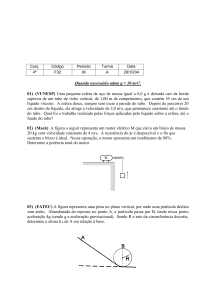
1. Considere duas esferas maciças de massa M e raio R. Estas eferas foram coladas uma à outra e postas a rodar em torno dum eixo perpendicular à linha que une os seus centros (ver
Figura).
O momento de inércia, I, deste conjunto, relativamente ao eixo respectivo é
(a) I = 0, 80 M R2 .
(b) I = 10, 8 M R2 .
(c) I = 1, 33 M R2 .
(d) I = 11, 3 M R2 .
2R
2R
(1,0 valor)
Teste de Avaliação - 3
12.Janeiro.2005
F ÍSICA G ERAL I
2
UBI
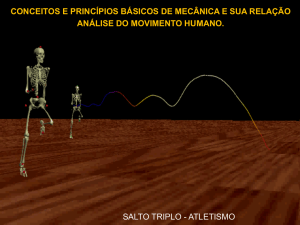
No laboratório de Física um estudante efectua uma experiência, colocando-se no centro
duma plataforma giratória, que pode rodar sem atrito, com um momento de inércia igual
1, 25 kg m2 .
Segurando um peso em cada uma das mãos, o estudante tem inicialmente os braços junto
ao corpo e a plataforma é posta a rodar com uma velocidade ωa = 1, 50 rot/s, ver (Figura
(a)). O seu momento de inércia (incluindo os pesos), nesta configuração é de 2, 50 kg m2 .
Após algumas rotações, o estudante abre os braços ( ver Figura (b), fazendo com que a sua
velocidade angular tome o valor de ωb = 5, 10 rad/s.
ωa
(a)
ωb
(b)
2. A quantidade de movimento angular, L, do sistema "estudante + pesos + plataforma" é
(a) L = 1, 88 kg m2 /s.
(b) L = 5, 63 kg m2 /s.
(c) L = 23, 6 kg m2 /s.
(d) L = 35, 3 kg m2 /s.
(1,0 valor)
3. O momento de inércia do estudante, incluindo os pesos, quando este tem os braços abertos
é
(a) 2, 50 kg m2 .
(b) 3, 75 kg m2 .
(c) 5.67 kg m2 .
(d) 6, 93 kg m2 .
(1,0 valor)
Teste de Avaliação - 3
12.Janeiro.2005
F ÍSICA G ERAL I
UBI
3
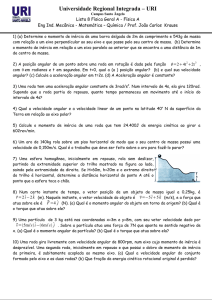
4. Numa determinada obra é necessário içar várias estruturas metálicas de massa m = 500 kg
até uma altura h = 220 m, em menos de 60, 0 s. Para executar essa tarefa foi concebido um
guindaste, com um motor no seu topo (ver Figura).
A potência mínima, P , que o motor deve ter para
içar as massas referidas, com velocidade constante,
é de
(a) P = 1080 kW.
(b) P = 18, 0 kW.
m
h
(c) P = 818 W.
(d) P = 3, 67 W.
(1,0 valor)
5. Indique qual das afirmações está incorrecta.
A variação da energia cinética duma partícula é igual
(a) ao trabalho da força resultante que actua na partícula.
(b) à soma do trabalho de cada uma das forças que actuam na partícula.
(c) à soma do trabalho das forças que actuam na partícula e que têm uma componente
vectorial, na direcção do deslocamento.
(d) à soma do trabalho das forças que actuam na partícula, perpendicularmente à direcção
do deslocamento.
(1,0 valor)
6. Uma mola de constante elástica k = 20 N/m é comprimida 30 cm, a partir do seu comprimento natural. O trabalho, WFm , realizado pela força da mola é
(a) WFm = 0.
(b) WFm = −0, 90 J.
(c) WFm = 1, 8 J.
(d) WFm = −6, 0 J.
(1,0 valor)
Teste de Avaliação - 3
12.Janeiro.2005
F ÍSICA G ERAL I
4
UBI
PARTE P RÁTICA
7. Considere uma escada uniforme de massa M = 14 kg e comprimento L, apoiada numa
parede sem atrito e que faz um ângulo θ = 60◦ com o chão horizontal, onde existe atrito (ver
Figura). Esta escada está em equilíbrio e tem um balde de massa m = 4, 0 kg, pendurado a
um quarto do seu comprimento, medido a partir do cimo da escada.
L/4
(a) Determine a reacção normal do chão sobre a escada.
m
(b) Determine a força que a parede exerce sobre a escada.
(c) Determine o valor mínimo do coeficiente de atrito estático,
que mantém a escada em equilíbrio.
q
(3,5 valores)
8. Considere dois blocos de massa m, ligados por um fio inextensível, de massa desprezável,
que passa por uma roldana cilíndrica, de massa m e raio R = 10, 0 cm (ver Figura). O fio
passa na roldana sem escorregar, sendo atrito entre o bloco esquerdo e o plano horizontal
desprezável.
Este sistema inicia o movimento a partir do repouso, quando o bloco da direita se encontra a
uma altura h = 5, 00 m do solo.
(a) Determine a aceleração com que os blocos
se movem.
(b) Determine a velocidade angular da roldana, quando o bloco da direita atinge o
solo.
m
m,R
m
h
(3,5 valores)
Teste de Avaliação - 3
12.Janeiro.2005
F ÍSICA G ERAL I
UBI
5
9. Uma ventoinha tem um momento de inércia I = 13, 5 × 10−3 kg m2 e uma massa m = 500 g.
Num determinado instante, esta é ligada e fica sujeita a um momento de força τ = 1, 50 ×
10−3 N m, que actua uniformemente durante 30, 0 s.
(a) Determine a velocidade angular da ventoinha após os 30, 0 s iniciais.
(b) Qual é o momento da força necessário para colocar a ventoinha
novamente em repouso em 15, 0 s?
(c) Qual seria o raio de um anel, com a mesma massa, que tem a
mesma inércia rotacional que a ventoinha? (raio de giração).
(3,5 valores)
10. Considere um bloco de massa m, que se encontra a uma altura h do solo, no cimo dum
plano inclinado de inclinação θ (ver Figura). O bloco é solto a partir do repouso e desliza ao
longo do plano inclinado, estando sujeito ao atrito, atingindo o solo com uma determinada
velocidade.
m
h
θ
Considere os valores h = 10, 0 m, m = 5, 00 kg, µc = 0, 15 e θ = 30◦ .
Relativamente ao bloco de massa m, determine:
(a) o trabalho realizado pela força de atrito.
(b) o trabalho realizado pela força gravítica.
(c) a velocidade com que o bloco chega ao solo.
(3,5 valores)
S OLUÇÃO
E SCOLHA M ÚLTIPLA
1. O momento de inércia do conjunto de esferas pode ser calculado somando os momentos
de inércia de cada uma das esferas, em torno do eixo de rotação indicado. Estes momentos
de inércia, que designamos de I1 , para a esfera mais perto do eixo de rotação, e I2 , para a
esfera mais longe do eixo, podem ser calculados usando o Teorema dos Eixos Paralelos (ver
Figura).
I1
I CM
I2
I CM
3R
R
Sabendo que o momento de inércia de uma esfera sólida, em torno de um eixo que passa
pelo seu centro de massa, dado por ICM = 52 M R2 (ver Tabela), as inercias rotacionais I1 e
I2 , em torno do eixo indicado, são dadas por
I1
= ICM + M R2
=
=
2
5
7
5
= ICM + M (3 R)2
I2
M R2 + M R2
=
M R2
=
2
2
5 M R + 9M
47
2
5 MR .
R2
Nessa conformidade, o momento de inércia deste conjunto é dado por
I
= I1 + I2
=
=
=
7
47
2
5 MR + 5
54
2
5 MR
2
M R2
10, 8 M R .
Opção (b).
2. O momento angular, na direcção do eixo de rotação, do sistema "estudante + pesos + plataforma" , tendo o estudante os braços fechados (configuração (a)), é
L = Isistema ωa ,
em que Isistema representa a inércia rotacional deste sistema em torno do eixo de rotação e
ωa
=
2 π × 1, 50
=
3, 00 π rad/s ,
Teste de Avaliação - 3
12.Janeiro.2005 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
é a velocidade angular, expressa em unidades do SI.
O momento de inércia, Isistema , é dado pela soma dos momentos de inércia de cada um dos
componentes do sistema, i.e., na configuração (a),
Isistemaa = Iestudante+pesosa + Iplataforma .
Sendo o momento de inércia do estudante (incluindo os pesos), na configuração (a), igual a
2, 50 kg m2 , o momento angular do sistema é
L =
=
(1, 25 + 2, 50) × 3, 00 π
35, 3 kg m2 /s
Opção (c).
3. Quando o estudante abre os braços, altera o seu momento de inércia, sem no entanto alterar
a quantidade de movimento angular do sistema, enquanto composto pelo estudante, pesos
e plataforma, pois nesta alteração de configuração apenas intervieram forças internas ao sistema.
Posto isto, o momento angular, após a alteração de configuração, Lb , é o mesmo que o inicial,
La , calculado na alínea anterior, i.e.,
Iestudante+pesosa
La
Isistemaa ωa
+ Iplataforma ωa
= Lb
= Isistemab ωb
= Iestudante+pesosb + Iplataforma ωb ,
donde podemos extrair o momento de inércia do estudante, incluindo os pesos (na configuração (b)), da seguinte forma,
Iestudante+pesosb
ωa
Iestudante+pesosa + Iplataforma
− Iplataforma
ωb
3, 00 π
− 1, 25
= (1, 25 + 2, 50) ×
5, 10
= 5, 67 kg/m2 ,
=
Opção (b).
4. Desprezando o trabalho que é necessário realizar pelo motor para arrancar e parar, a potência necessária para elevar cada uma das estruturas, com velocidade constante, é dado pelo
quociente do trabalho da força aplicada pelo motor do guindaste na estrutura a içar, W „
pelo tempo, ∆ t, em que se deseja realizar assa elevação;
P
=
W
.
∆t
A força, F~ , que o guindaste aplica na estrutura a içar deve ser exactamente igual ao peso da
estrutura, de modo a que o somatório das forças aplicadas na estrutura seja nulo,
velocidade constante =⇒
X
F~ = 0 =⇒ F = m g .
O trabalho realizado por essa força constante é dado por
W
= F~ · ~s
= mgh ,
1
Teste de Avaliação - 3
F ÍSICA G ERAL I
12.Janeiro.2005 - SOLUÇÕES
UBI
onde ~s representa o vector deslocamento que tem a mesma direcção e sentido da força, F~ ,
exercida pelo motor na estrutura a içar.
Finalmente obtemos
mgh
∆t
500 × 9, 81 × 220
=
60
= 18, 0 kW .
P
=
Opção (b).
5. A variação da energia cinética pode ser dada por pelo Teorema do Trabalho e Energia,
∆K
= Wres
=
R
~
F~res · ds
i.e., a variação da energia cinética duma partícula é igual ao trabalho da força resultante que
actua na partícula (alínea (a)).
A força resultante é dada por
F~res
=
X
F~i
i
= F~1 + F~2 + ... + F~N ,
onde o somatório em i é referente a N forças aplicadas à partícula em questão. Nesta conformidade o trabalho da força resultante também pode ser expresso por
Z
∆K
=
~ +
F~1 · ds
Z
~ + ... +
F~2 · ds
Z
~
F~N · ds
= W1 + W2 + ... + WN ,
i.e., a variação da energia cinética duma partícula é igual à soma do trabalho de cada uma
das forças, que actuam na partícula (alínea (b)).
De uma outra forma, a força resultante também pode ser decomposta em duas componen~ e a compotes: a componente da força resultante, F~res= , perpendicular ao deslocamento ds,
~
~
nente da força resultante, Fresk , perpendicular ao deslocamento ds.
Uma vez que as forças perpendiculares ao movimento não realizam trabalho, pois
~ =0 ,
F~resk · ds
a variação de energia cinética também pode ser calculada da seguinte forma
∆K
Z
~ +
F~resk · ds
Z
~
F~res= · ds
=
=
Z
~
F~res= · ds
= Wres= ,
i.e., a variação da energia cinética duma partícula é igual à soma do trabalho das forças que
actuam na partícula, com uma componente vectorial na direcção do deslocamento (alínea
2
Teste de Avaliação - 3
12.Janeiro.2005 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
(c)).
A opção (d) só será verdadeira, caso a variação de energia cinética seja nula, i.e., não é válida
num caso geral, pelo que a afirmação incorrecta é a opção (d).
6. A força de uma mola, quando é deslocada uma distância x a partir da sua posição de equilíbrio (comprimento natural da mola), é dada pela lei de Hooke,
Fm = −k x ,
em que k representa a constante de elasticidade da mola.
O trabalho realizado pela força da mola, ao comprimi-la até uma posição xf = 0, 30 ou
xf = −0, 30, de acordo com o referencial unidimensional utilizado, é dado por
Z
Wm
xf
=
Fm dx
0
Z
=
=
=
=
=
Opção (b).
xf
(−k x) dx
0
xf
1
2
− kx
2
0
1
− k (± xf )2 + 0
2
1
− × 20 × (0, 30)2
2
−0, 9 J .
3
Teste de Avaliação - 3
12.Janeiro.2005 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
U MA R ESOLUÇÃO P OSSÍVEL
PARTE P RÁTICA
7. Consideraremos o nosso sistema apenas composto pela escada.
Uma vez que a escada se encontra em equilíbrio, devem verificarse simultaneamente as condições de equilíbrio, para a translação
e rotação,
( P
F~
= 0
Pext
τz = 0 ,
L/4
F
y
mg
x
Mg
onde o momento das forças externas pode ser calculado relativamente a um ponto qualquer (situação de equilíbrio). Os
momentos das forças externas, de acordo com o referencial
da Figura, têm apenas uma componente vectorial segundo a
direcção z, dado que todas as forças aplicadas na escada estão
no plano xOy.
N
P
q Fa e
Para verificar estas condições de equilíbrio devem contabilizar-se todas as forças que actuam
no sistema. Desta forma temos:
~ , com direcção perpendicular ao plano e aplicado no ponto
• a reacção normal do chão, N
de contacto da escada com o chão (ponto P );
• a força de atrito estático entre a escada F~a e o chão, de direcção horizontal, e também
e
aplicada na extremidade inferior da escada (ponto P ), no sentido da parede, contrariando a tendência da escada em escorregar;
• o peso da escada, M ~g , aplicado no seu centro de massa;
• a tensão da corda que sustenta o balde, igual ao peso do balde (m ~g ), aplicada a uma
distância 34 L medida ao longo da escada, a partir do ponto P ;
• a reacção normal, F~ , da parede sobre a escada, de direcção perpendicular à parede e
aplicada no ponto de contacto entre a escada e a parede (ver figura).
De acordo com a figura, a segunda Lei de Newton para o equilíbrio na translação e rotação
são, respectivamente,
(
~ + M ~g + m ~g + F~
F~ae + N
τae,z + τNz + τM gz + τm gz + τFz
=
=
0
0
.
Usando o referencial da figura, as expressões anteriores resultam em três equações, duas
relativamente ao equilíbrio para a translação e uma relativamente ao equilíbrio para a rota~ e F~a são nulos (a
ção, calculada relativamente ao ponto P onde os momentos das forças N
e
direcção destas forças passa pelo ponto P ). Nessa conformidade, temos
N − M g − mg
F −F
ae 1
−M g 2 L cos θ − m g
3
4
L cos θ + F L sin θ
= 0
= 0
= 0
.
Os braços do momento das forças m ~g , M ~g e F~ podem ser determinados medindo a distância perpendicular do ponto P à direcção de cada uma destas forças, sendo os momentos das
forças τM gz e τm gz negativos e o momento da força τFz , positivo. Desenvolvendo o sistema
de equações anterior, obtemos
4
Teste de Avaliação - 3
F ÍSICA G ERAL I
12.Janeiro.2005 - SOLUÇÕES
N
Fae
F
= (M + m) g
= F
3
cos θ 1
M+ m
= g
sin θ 2
4
UBI
(eq.1)
(a) A reacção normal do chão sobre a parede pode ser calculada directamente a partir da
primeira equação do sistema de equações (eq.1), i.e,
N
= (M + m) g
= (14 + 4) × 9, 81
= 180 N .
(b) A força de atrito entre o chão e a escada é dada pela terceira equação do sistema (eq.1),
F
1
3
M+ m
2
4
cos 60◦
1
3
= 9, 81 ×
×
× 14 + × 4
sin 60◦
2
4
= 57 N .
cos θ
= g
sin θ
(c) O valor mínimo que o coeficiente de atrito estático deve ter, para a escada se manter
em equilíbrio nesta configuração pode ser determinado usando a expressão da força
de atrito estático, quando esta toma o seu valor máximo, i.e.,
Fae max
= µe N
e
Fae max
= µe (M + m) g ,
usando a expressão para a normal N , calculada na alínea anterior.
Usando o resultado da alínea (a) e as equações (eq.1), vemos que o valor força da parede sobre a escada tem de ser igual ao valor da força de atrito estático, Fae = F , ou
seja,
Fae = g
cos θ
sin θ
1
3
M+ m
2
4
.
Assim, para a escada estar em equilíbrio, a força de atrito estático tem de ser menor ou
igual à força de atrito estático máxima, ou seja
Fae max
µe (M + m) g
≥ Fae
1
≥ g
tan θ
1
3
M+ m .
2
4
Resolvendo esta última expressão em ordem a µe , obtemos
µe (M + m) g
cos θ
≥ g
sin θ
1
3
M+ m
2
4
3
1
2 M + 4 m
(m + M ) tan θ
1
3
2 × 14 + 4 × 4
(4 + 14) × tan 60◦
µe
≥
µe
≥
µe
≥ 0, 32 .
5
Teste de Avaliação - 3
F ÍSICA G ERAL I
12.Janeiro.2005 - SOLUÇÕES
6
UBI
8. Neste problema abordamos um caso de dinâmica de translação e rotação fora do equilíbrio.
As leis da dinâmica serão aplicadas separadamente a cada um dos três corpos que vão ter
aceleração imediatamente após o bloco suspenso ser solto a partir do repouso. Os três corpos em questão são as duas massas m e uma roldana cilíndrica de raio R e massa m. Nessa
conformidade, devem ser contabilizadas todas as forças externas em cada um dos três corpos e aplicada a segunda lei de Newton, separadamente.
Quando este sistema é solto a partir do repouso,
o bloco no plano horizontal inicia um movimento
de translação horizontal, com uma aceleração ~a1 .
O bloco suspenso inicia um movimento de translação vertical, com aceleração ~a2 . Finalmente, a roldana irá ter apenas movimento de rotação em torno
do seu centro de massa, com aceleração angular α
~.
Uma vez que o fio é inextensível, as acelerações dos
três corpos estão relacionadas, i.e., os módulos das
acelerações dos blocos, que passamos a designar
por a, são iguais:
a1
T'1
N1
mg
P
T2
y
x
z
|~a1 | = |~a2 | = a .
α
T1 N
T'2
mg
Adicionalmente, dado que o fio não escorrega na
roldana, a aceleração de um ponto na extremidade
da roldana é a mesma da aceleração do fio, logo
a = αz R .
Note-se que o sentido de cada uma das acelerações, segundo o referencial indicado na Figura, é coerente com o sentido do movimento, i.e., a aceleração do bloco no plano horizontal
é positiva, a aceleração angular da roldana é negativa e a aceleração do bloco suspenso também é negativa.
As forças aplicadas em cada um dos corpos são as seguintes (ver Figura):
• no bloco no plano horizontal→ o seu peso m ~g , a reacção normal do plano sobre o
~ 1 , e a tensão no fio T~ 0 ;
bloco, N
1
• na roldana→ o peso m ~g da roldana, a reacção normal do eixo da roldana sobre a rol~ , de direcção desconhecida, a tensão no fio T~1 devido ao bloco no plano horidana, N
zontal, e a tensão no fio T~2 devido ao bloco suspenso.
• no bloco suspenso→ o peso do bloco m ~g e a tensão no fio T~ 0 .
2
Dado que o fio não tem massa, as tensões ao longo de cada um dos segmentos (horizontal e
vertical) são iguais, i.e.,
|T~10 | = |T~1 | = T1
|T~20 | = |T~2 | = T2 .
Nessa conformidade, a segunda lei de Newton, para a translação e rotação, aplicada em
cada um dos corpos e de acordo com o referencial da Figura, po escrever-se,
a2
Teste de Avaliação - 3
bloco no plano horizontal
P~
Fext
T1
N1 − m g
F ÍSICA G ERAL I
12.Janeiro.2005 - SOLUÇÕES
= m ~a1
= ma
= 0
bloco suspenso
P~
Fext
T2 − m g
roldana
P~
F
P ext
τext,z
= m ~a2
= −m a
UBI
= 0
= −ICM αz
~ + P~
T~1 + T~2 + N
−T2 R + T1 R
= 0
= −ICM αz
onde ICM representa o momento de inércia da roldana em torno do eixo de rotação que
passa pelo seu centro de massa.
(a) A aceleração, a, com que os blocos se movem, pode ser determinada através das equações para a translação dos blocos e da equação para a rotação da roldana
T1 = m a
T1 = m a
⇔
⇔
T2 − m g = −m a
T2 = m (g − a)
−T2 R + T1 R = −ICM αz
(T1 − T2 ) R = −ICM αz .
O momento de inércia da roldana cilíndrica é dado por (ver Tabela)
ICM =
1
m R2
2
e a aceleração angular está relacionada com a aceleração dos blocos (ver equação anterior). Efectuando estas duas substituições nas equações da dinâmica obtemos
T1 = m a
T1 = m a
T2 = m (g − a)
⇔
T = m (g − a)
2
(m a − m (g − a)) R = − 1 m R2 a
a = 52 g
2
R
Logo, a aceleração com que os blocos se deslocam é
a=
2
2
g = × 9, 81 = 3, 92 m/s2 .
5
5
(b) A velocidade angular da roldana, quando o bloco da direita atinge o solo, pode ser
calculada tendo em consideração que o bloco suspenso têm um movimento rectilíneo
uniformemente de aceleração, com a = 52 g, e que a roldana tem um movimento rotacional também uniformemente acelerado, de aceleração angular αz . Estas equações são
expressas usando um novo referencial, indicado na Figura, e tendo em conta que, no
instante t = 0, o sistema está em repouso.
Nestas condições, a equação do movimento para o
bloco suspenso é
1 2
at
2
e a equação da velocidade angular para a roldana é
x(t) =
O
ωo=0
x
α
z
vox=0
a
h
ωz (t) = −αz t .
O tempo t0 , que o bloco demora a percorrer a distância h até ao solo, é dado por
7
Teste de Avaliação - 3
12.Janeiro.2005 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
1
02
= r
⇔
2 at
2h
=
.
a
h
t0
No instante t0 , a velocidade angular da roldana é igual a
ωz (t0 )
= −αz r
t0
a
2h
= −
R
a
1 √
= −
2ha
Rr
gh
2
= −
,
R
5
A velocidade angular, quando o bloco suspenso atinge o solo é
2
R
r
2
gh
=
×
5
0, 100
r
9, 81 × 5, 00
= 62, 6 rad/s .
5
9. O Teorema do Impulso-Momento Angular para um corpo rígido pode ser expresso da seguinte forma:
Z
~ .
~τ dt = ∆L
No problema em questão, o movimento de rotação é unidimensional ( no eixo z) e o momento da força é constante, pelo que a expressão anterior pode ser simplificada para
τz ∆ t = ∆ Lz .
Por outro lado, a variação do momento angular de um corpo rígido, segundo a direcção z
(eixo de rotação), pode ser expressa por
∆ Lz = I ∆ ω ,
onde I representa o momento de inércia do corpo, em torno do eixo de rotação.
Consequentemente, a acção de um momento de força constante na ventoinha durante um
intervalo de tempo ∆ t, equivalente na variação da sua velocidade angular:
τz ∆ t = I ∆ ω .
(a) A velocidade angular da ventoinha, ωf , após um intervalo de tempo ∆ t = 30, 0 s,
tendo em atenção que esta parte do repouso (ωi = 0), pode ser determinada da seguinte
forma:
τz ∆ t
= I ∆ω
⇔
τz ∆ t
= I ∆ (ωf − ωi )
⇔
ωf
=
ωf
=
ωf
=
τz ∆ t
I
1, 50 × 10−3 × 30, 0
13, 5 × 10−3
3, 33 rad/s .
⇔
⇔
8
Teste de Avaliação - 3
F ÍSICA G ERAL I
12.Janeiro.2005 - SOLUÇÕES
UBI
(b) Nesta situação, a ventoinha tem uma velocidade inicial ωi0 = 3, 33 rad/s e pretendese que a sua velocidade final seja nula, i.e., ωf0 = 0, pela a acção de um momento de
força, τz0 , a determinar, que actua de forma constante durante um intervalo de tempo
∆ t0 = 15, 0 s.
Usando novamente a expressão do teorema Impulso-Momento Angular, deduzida na
alínea anterior, temos
τz0 ∆ t0
τz0
τz0
τz0
τz0
τz0
= I ∆ (ωf0 − ωi0 )
⇔
I
ω0
∆ t0 i
I τz ∆ t
= − 0
∆t
I
∆t
= −τz
∆ t0
= −
⇔
⇔
⇔
30, 0
15, 0
= −3, 00 × 10−3 N m .
= −1, 50 × 10−3 ×
⇔
10. O bloco de massa m vai ter um movimento descendente, rectilíneo, uniformemente acelerado, devido à acção de três forças constantes que actuam no bloco durante a sua descida.
As forças são as seguintes:
~ , do plano inclinado sobre o bloco com direcção perpendicular ao
• a reacção normal, N
plano;
• o peso do bloco, m ~g , que actua no centro de massa do bloco com direcção vertical;
• a força de atrito cinético, F~ac , que actua com direcção paralela ao plano inclinado e
contrariamente ao movimento.
y
a
N Fa c
x
mg
θ
s
θ
A equação da dinâmica para a translação (2a lei de Newton) é
X
F~ = m ~a
⇔
~ + F~a + m ~g = m ~a .
N
c
De acordo com o referencial da figura temos, para cada uma das direcções ortogonais, as
equações
N − m g cos θ
m g sin θ − Fac
= 0
= ma
⇔
N = m g cos θ
m a = m g sin θ − Fac ,
9
Teste de Avaliação - 3
12.Janeiro.2005 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
pois só existe aceleração segundo o eixo x. A primeira equação permite-nos obter a força
normal, N , e a segunda equação pode ser usada para determinar a aceleração do bloco. A
intensidade da força de atrito cinético do plano sobre o bloco é proporcional à força normal
e vale
Fac = µc N .
ou seja, substituindo o valor da normal, dado pela a expressão anterior, obtemos
Fac = µc m g cos θ ,
que na sua forma vectorial é dado por
F~ac = −µc m g cos θ î .
O bloco encontra-se inicialmente em repouso, no topo do plano inclinado, e chega ao solo
com uma determinada velocidade vf . Para estas duas configurações do sistema, o vector
deslocamento, ~s, é um vector com comprimento e direcção da hipotenusa do triângulo rectângulo que define o plano inclinado (ver Figura), i.e.,
~s =
h
î .
sin θ
(a) A força de atrito cinético é uma força constante que actua na mesma direcção e sentido
contrário ao deslocamento. O trabalho realizado por esta força é dado pelo produto
interno do vector força de atrito pelo vector deslocamento, ~s. Nesta conformidade,
este trabalho é negativo e é dado por
W F ac
= F~ac · ~s
h
= −µc m g cos θ î ·
î
sin θ
1
= −µc m g h
tan θ
= −0, 12 × 5, 00 × 9, 81 × 10, 0 ×
= −127 J
1
tan 30◦
(b) O vector força gravítica, m ~g , tem duas componentes ortogonais, uma na direcção e
sentido do deslocamento, m g sin θ que realiza trabalho, e outra na direcção perpendicular ao deslocamento, m g cos θ, que não realiza trabalho, i.e.,
m ~g = m g sin θ î − m g cos θ ĵ .
O trabalho da força de atrito cinético (constante) é dado,
Wm g
= m ~g · ~s
h
=
m g sin θ î − m g cos θ ĵ ·
î
sin θ
h
= m g sin θ
sin θ
= mgh
= 5, 00 × 9, 81 × 10, 0
= 491 J
(c) A velocidade com que o bloco chega ao solo pode ser determinada através do Teorema
Trabalho-Energia que nos diz que o trabalho realizado por todas as forças que actuam
no sistema é igual à variação de energia cinética do sistema, i.e,
10
Teste de Avaliação - 3
12.Janeiro.2005 - SOLUÇÕES
F ÍSICA G ERAL I
UBI
Wres = ∆ K .
Como já vimos anteriormente, as forças que actuam no sistema (bloco de massa m) são
~ = m g cos θ ĵ, é
a força gravítica, a força de atrito e a reacção normal. Esta força, N
perpendicular ao deslocamento e não realiza trabalho, como facilmente se pode comprovar:
WN = m g cos θ ĵ ·
h
î = 0 .
sin θ
Assim, o teorema do trabalho e energia relativo às duas posições do bloco (topo do
plano inclinado e o solo) pode ser expresso da seguinte forma:
W N + W m g + W F ac
m g h − µc m g h
1
tan θ
vf
vf
vf
=
1
2
1
2
m vf2 −
1
2
m vi2
m vf2
r
µc =
2gh 1 −
tan θ
s
0, 15
2 × 9, 81 × 10, 0 1 −
=
tan 30◦
= 12, 0 m/s ,
=
⇔
⇔
⇔
⇔
onde se considera que energia cinética no topo do plano é nula (parte do repouso),
Ki = 0, e quando o bloco chega ao solo é dada por Kf = 21 m vf2 .
11