Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
SIMULAÇÃO – MODELAGEM DE SISTEMAS POR LAPLACE
A modelagem matemática de um sistema é sempre uma tarefa muito complexa para o engenheiro de
sistemas e depende da experiência em projetos anteriores dessa natureza. Inicialmente é preciso formular
hipóteses simplificadas de modo que o modelo resultante seja o mais aproximado possível do modelo real.
Quando possível for o modelo pode ser emulado a partir de dados experimentais e usando, por exemplo,
técnicas com redes neurais e lógica fuzzy na identificação e obtenção do modelo direto ou inverso. Muitas
vezes o engenheiro do sistema dispõe da função de transferência do sistema que nada mais é a relação
entrada e saída do sistema e quando é descrito pela sua FT é possível a simulação no domínio de tempo e da
freqüência e obter a resposta dinâmica do sistema. Um sistema pode ser descrito de várias formas, como por
exemplo, pela equação diferencial ordinária nas variáveis de entrada e saída, pela sua função de transferência
e o modelo descreve o seu comportamento dinâmico. Quando se conhece o comportamento dinâmico do
sistema o engenheiro de sistemas consegue prever qual será a sua resposta e aplicar técnicas de
compensações a fim de garantir a estabilidade do sistema, pois um sistema está sujeito à perturbações ou
ruídos, os quais podem levar o sistema a resposta indesejável. Assim é muito importante o conhecimento do
sistema e assim através de simulações, o engenheiro de sistemas pode estudar o comportamento do sistema
sujeito à certos tipos de interferências e a sua estabilidade. A simulação é uma ferramenta fabulosa para
apoiar o estudo do comportamento de sistemas e uma das mais importantes nessa área é o Matlab que dispõe
de recursos matemáticos muito importantes, como transformada de Laplace para estudo do comportamento
do sistema ou a resposta em freqüência e a sua antitrasnformada para o domínio no tempo.
MODELAGEM DO SISTEMA ELÉTRICO
No campo da enegenharia elétrica temos três áreas de estudos a saber: eletrônica, elétricidade e
eletromagnetismo. Nesse estudo focaremos somente no campo da eletricidade e estudaremos os circuitos
elétricos. Denominaremos de elementos passivos os componentes básicos e que não geram energia e
somente a recebem e os elementos ativos são contrários dos passivos e geram energia.
FUNÇÕES DE TRANSFERÊNCIAS DE CIRCUITOS ELÉTRICOS
No campo da eletrcidade podemos sintetizar 03 elementos fundamentais passivos e são eles: resisores,
capacitores e indutores.
RESISTOR
O resistor é um elemento passivo que possui uma propriedade chamada de resistência elétrica e que é medida em
ohms (Ω). A resistência elétrica, como o próprio nome sugere é a capacidade que um elemento possui de se opor
à passagem de corrente elétrica. Um resistor ôhmico oferece um relacionamento linear entre tensão e corrente em
seus terminais. Podemos definir a resistência elétrica pela lei de OHM, onde:
R=
V
, onde V é a tensão ou voltagem elétrica e I é a corrente elétrica que atravessa o resisto.
I
CAPACITOR
Um capacitor bipolar (ou um elemento passivo bipolar qualquer de circuito elétrico) tem a
capacitância de um farad se, carregado com uma carga elétrica q de um coulomb, apresenta uma diferença de
potencial elétrico de um volt entre os seus terminais.
Pág. 1
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
V
ou podemos escrever:
q
dV
1
ou V(t) = ∫ i(t)dt , onde V é a tensão elétrica e I a corrente elétrica e q a carga elétrica.
i(t) = C
dt
C
C=
INDUTOR
O indutor é um elemento passivo capaz de armazenar e fornecer quantidades finitas de energia. Ao contrário
de uma fonte ideal, eles não podem fornecer quantidades ilimitadas de energia ou manter o fornecimento de
uma determinada potência média.
Quando a corrente que atravessa um condutor varia, o fluxo magnético que o envolve também varia. Esta
variação de fluxo magnético φ ocasiona a indução de uma voltagem num circuito próximo ao condutor. Esta
voltagem induzida é proporcional à razão de variação da corrente geradora do campo magnético com o
tempo. Essa constante de proporcionalidade é chamada indutância e é simbolizada pela letra L.
A unidade de indutância é Henry (H) e a relação é portanto:
L=
φ
, onde φ é o fluxo magnético e i a corrente elétrica.
I
Podemos escrever que:
V(t) = L
di(t)
1
ou i(t) = ∫ V(t)dt , onde V é a tensão elétrica e I a corrente elétrica.
dt
L
A tabela a seguir resume os componentes e as relações entre a tensão corrente e entre a tensão e carga sob
condições iniciais iguais a zero. Utilizndo-se como princípo as leis de Kirchoff, onde somando-se as tensões
ao longo da malha e as correntes em nós. A combinação desses elementos implementa-se os circuitos
elétricos e obter a sua função de transferência.
Componente
Tensão-corrente
Corrente-tensão
Tensão-carga
Impedância
Z(s) = V(s)/I(s)
Admitância
Y(s) = I(s)/V(s)
Indutor
Ω
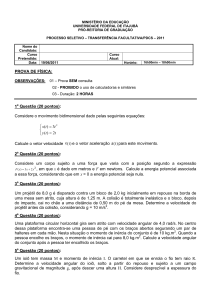
Exemplo: Obter a função de transferência do circuito elétrico RLC a seguir relacionando a tensão no
capacitor VC(s) e a tensão de entrada V(s). São dados L, C e R.
Pág. 2
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Aplicando-se a lei de Kirchoff para a malha em questão, temos:
t
di(t) 1
dq
Ri(t) + L
+ ∫ i(t)dt = v(t) (1) e i(t) =
(2), temos:
dt
C0
dt
L
d 2q(t)
LC
2
+R
dt
d 2 vc (t)
dt
2
dq(t) 1
+ q(t) = v(t), q(t) = Cvc .
dt
C
+ RC
dvc
+ vc (t) = v(t)
dt
Aplicando-se a transformada de laplace e admitindo-se que as condições iniciais sejam nulas, temos:
LCs2Vc(s) + RCsVc(s) + Vc(s) = V(s) ou Vc(s)(LCs2 + RCs + 1) = V(s).
1
V (s)
1
LC
=
A função de transferência é: C =
2
R
V(s) LCs + RC + 1 s 2 + s + 1
L
LC
MODELAGEM MATEMÁTICA DE SISTEMAS MECÂNICOS
Os sistemas mecânicos são classificados em dois grupos: são eles os sistemas mecânicos de translação,e os
sistemas mecânicos de rotação.
Para recordação, a seguir apresentamos alguns conceitos importantes relativos aos sistemas mecânicos.
Massa
A massa de um corpo é uma quantidade de matéria do corpo que é constante. Fisicamente, a massa de um
corpo é responsável pela inércia do mesmo, isto é, a resistência à mudança de movimento de um corpo. O
peso de um corpo, é a força com a qual a terra exerce atração deste corpo.
P = mg , onde:
M = massa = (Kg)
g = aceleração da gravidade (m/s2)
P = peso do corpo (Kgf)
Pág. 3
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Embora o peso de um corpo possa variar de um ponto para outro, a massa do mesmo não varia.
Força
A força é definida como a causa a qual pode produzir uma mudança na posição de um corpo, no qual a força
atua. As forças, podem ser classificadas de duas formas, forças de contato e forças de campo. As forças de
contato são aquelas que tem um contato direto com o corpo, enquanto as forças de campo não apresentam
contato direto com o corpo, como por exemplo, força magnética e força gravitacional.
Torque
O torque T é definido como qualquer causa que tende a produzir uma mudança na posição angular
(rotacional) de um corpo, no qual o torque esteja atuando.
Deslocamento, Velocidade e Aceleração
O deslocamento x(t) é a troca de posição de um ponto, tomado como referência, para outro. A velocidade é a
derivada temporal do deslocamento x(t).
v(t) =
dx(t)
&
= x(t)
dt
A aceleração é a derivada temporal da velocidade:
a(t) =
dv(t)
d 2 x(t)
& =
= v(t)
= &&
x(t)
dt
dt 2
Deslocamento Angular, Velocidade Angular e Aceleração Angular
O deslocamento angular “θ(t)”, é definido como a troca de posição angular, sobre um eixo, de um ângulo
tomado como referência e outro. É medido em radianos. A direção anti-horário é tomada como positiva. A
velocidade angular “ω(t)”, é a derivada temporal do deslocamento angular “θ(t)”.
ω(t) =
dθ(t) &
= θ(t)
dt
A aceleração angular “α(t)”, é a derivada temporal da velocidade angular “ω”. Onde α é:
α(t) =
dω(t)
d 2θ(t) &&
& (t) =
=ω
= θ(t)
dt
dt 2
Obs: Se a velocidade ou a velocidade angular é medida em relação a uma referência fixa, então chamamos
de velocidade absoluta ou velocidade angular absoluta. Caso contrário serão grandezas relativas. O mesmo é
válido para a aceleração.
LEIS DE NEWTON
Das três leis que foram formuladas por Newton, a segunda lei é a mais importante, para a obtenção de
modelos matemáticos de sistemas mecânicos.
Pág. 4
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Segunda lei de Newton (Translação)
“A aceleração adquirida por de qualquer corpo rígido é diretamente proporcional as forças que atuam neste
corpo, e inversamente proporcional a massa deste corpo”.
∑ forças = ma
Segunda lei de Newton (Rotação)
“A aceleração angular de qualquer corpo rígido é diretamente proporcional aos torques que atuam neste
corpo, e inversamente proporcional ao momento de inércia deste corpo”. Onde: J → Momento de inércia;
∑ torques = Jα
SISTEMAS MECÂNICOS DE TRANSLAÇÃO
Nos sistemas mecânicos de translação, há três elementos mecânicos envolvidos que são: elemento de inércia,
elemento de amortecimento, elemento de elasticidade.
ELEMENTO DE INÉRCIA
O elemento de inércia é a massa M é rígida e a força aplicadda f(t) deve ser suficiente para deslocar a massa
M em x(t).
f(t) = M.a(t), onde a(t) é a aceleração da massa M submentida a força aplicada f(t). Podemos escrever:
f (t) = M
dV(t)
d 2 x(t)
=M
dt
dt 2
ELEMENTO DE AMORTECIMENTO (AMORTECEDOR)
No caso deste elemento existe um deslocamento relativo entre o ponto de conexão entrada e o ponto de
conexão saída. Portanto, existe a necessidade de duas variáveis deslocamento para descrever este elemento.
A realização física deste elemento é a fricção viscosa associada ao óleo ou ar.
Pág. 5
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Sendo x1(t) e x2(t) deslocamentos da conexão inferior e superior, pode-se escrever que:
f (t) = f v (
dx1 (t) dx 2 (t)
−
) = f v (v1 (t) − v 2 (t)) , onde fv é o coeficiente de amortecimento e v a velocidade.
dt
dt
ELEMENTO DE ELASTICIDADE
Este elemento, pode ser deformado por uma força externa, tal que a deformação é diretamente proporcional a
esta força.
Sendo x1(t) e x2(t) os deslocamentos respectivos a conexão de entrada e a conexão de saída. Podemos
escrever que:
f(t) K(x1(t) – x2(t)).
A tabela a seguir resume os componentes e as relações entre a tensão-corrente é equivalente a relação entre
força-velocidade e a tensão-carga elétrica q é associada com a força-deslocamento x., sob condições iniciais
iguais a zero. Utilizndo-se como princípo as leis de Newton e a combinação desses elementos implementa-se
os circuitos mecânicos e obter a sua função de transferência.
Pág. 6
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Componente
Forçavelocidade
Forçadeslocamento
Impedância
Zm(s)=F(s)/X(s)
Mola
Amortecedor viscoso
Massa
Nota: Os seguintes conjuntos de símbolos e unidades são usadas ao longo deste livro: f ( t ) = N
(newtons), x( t ) = m (metros), ν( t ) = m/s (metros/segundo), K =N/ m (newtons/metro), f ν = N.s/ m
(newton-segundo/ metro), M =kg (quilogramas = newton.segundo2 / metro).
ANALOGIAS COM SISTEMA ELÉTRICO
Existem analogias entre o sistema elétrico e o sistema mecânico. Essas analogias do sistema elétrico com o
sistema mecânico têm-se elementos básicos conhecidos passivos e lineares. São eles a mola, a massa como
armazenadores de energia e o amortecedor viscoso como dissipador de energia. Associamos a mola
analogamente ao capacitor elétrico, a massa como indutor elétrico e o amortecedor viscoso como o resistor
elétrico.
No quadro mecãnico acima K, fv e M são chamados respectivamente de constante da mola,
coeficiente de atrito viscoso e massa. No quadro elétrico analogamente a tensão-corrente é a forçavelocidade sendo a tensão elétrica a força mecânica e a corrente elétrica a velocidade mecânica. A tensãocarga elétrica q é associada com a força-deslocamento x. Podemos também associar que a somatórias das
forças referentes ás velocidades é análoga á somatórias das correntes na malha de um circuito elétrico.
Assim as equações de malhas podem ser aplicadas ao sistema mecânico. O sistema mecânico de translação
pode ser resolvido analogamente ao circuito RLC. A equação cde movimento descrito por uma equação
diferencial e aplicando-se a lei de Newton. Como no sistema elétrico escolhe-se o sentido do movimento
como positivo e determinando todas as forças sobre o corpo as que agem no sentido do movimento e as
opostas ao movimento. Pela lei de Newton constroi-se a lei do movimento somando-se as forças e
Pág. 7
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
igualando-se a soma a zero. Supondo-se as condições iniciais nulas e aplicando-se a transformada de
Laplace.
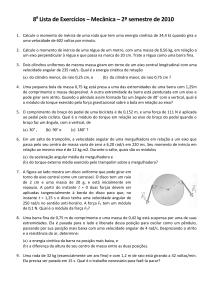
Exemplo: Obter a função de transferência X(s)/F(s), para o sistema a seguir.
Esse é um problema clássico para modelagem de sistemas dinâmicos, pois e´uma combinação dos elementos
de inércia, elasticidade e amortecimento. Uma vez que os elementos mecânicos dos movimentos de
translação estão definidos, as equações de sistemas mecânicos de translação podem ser escritas seguindo as
leis de Newton.
Neste sistema, três forças exercem influências sobre a massa M: força aplicada f(t), a força de
amortecimento e a força de elasticidade. A função de transferência , pode ser obtida, considerando-se a força
aplicada como entrada e o deslocamento x(t) como saída.
f (t) = M
d 2 x(t)
dt
2
+ fv
dx(t)
+ Kx(t) e podemos escrever que: F(s) = Ms2X(s) + BsX(s) + KX(s)
dt
1
X(s)
1
M
=
=
2
f
F(s) Ms + f vs + K s 2 + v + K
M M
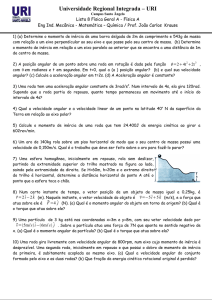
Exercício: Para o sistema mecânico a seguir determinar a sua função de transferência X2(s)/F(s).
Pág. 8
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
O problema tem dois gráus de liberdade enquanto uma massa move na horizontal a outra massa permanece
parada. Assim são necessárias duas equações de movimento para descrever o sistema. As duas equações vêm
dos diagramas de corpo livre de cada massa. Para a solução do problema devemos aplicar o princípio da
superposição dos movimentos. O princípio da superposição diz que primeiro devemos considerar uma massa
M1, por exemplo, em movimento e a massa M2 em repouso e daí calcula-se as forças exercidas pelo
movimento na massa M1. Em seguida considerarermos a massa M1 em repouso e a massa M2 em
movimento. Calcula-se as forças exercidas pelo movimento na massa M2. O resultado final é a soma das
forças nas duas situações descritas. Assim vamos considerar primeiro a massa M1 em movimento e a massa
M2 parada. A figura a seguir mostra as duas situações, onde a figura a) é a situação M1 em movimento e M2
parado e a figura b) é a situação M1 parado e M2 em movimento e a figura c) é o resultado final com a
somatórias das forças.
As equações são:
F(s) = [M1s 2 + s(f v1 + f v3 ) + (K1 + K 2 )]X1 (s) − (f v3 + K 2 )X 2 (s)
Da mesma forma com relação a M2 procedemos da mesma forma e primeiro deslocamos M2 e mantemos M1
em repouso e em seguida deslocamento M1 e mantemos M2 em repouso. O resultado final é a superposição
dos movimentos em M2 e a somatórias das forças aplicadas. A figura a seguir mostra a) com M2 em
movimento e M1 parado e da mesma forma em b) com M2 parado e M1 em movimento e a figura c) é o
resultado final com a superposição dos movimentos.
Pág. 9
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Da figura c) podemos escrever a segunda equação do movimento em relação à massa M2.
−(f v3s + K 2 )X1 (s) + [M 2s 2 + (f v2 + f v3 )s + (K 2 + K 3 )]X 2 (s) = 0
[M s + ( f
b
2
1
(
v1
]
)
(
)
+ f v2 s + (k1 + k 2 ) X 1(s ) − f v3 s + k 2 X 2 (s ) = F (s )
)
[
(
a
]
)
− f v3 s + k 2 X 1(s ) + M 2 s 2 + f v2 + f v3 s + (k 2 + k3 ) X 2( s ) = 0
A função de transferência fica:
G (s ) =
X 2(s )
F( s )
=
(f s + k )
ab − ( f s + k )
2
v3
2
v3
2
SISTEMAS MECÂNICOS EM ROTAÇÃO
Assim como no movimento de translação, o movimento de rotação pode ser modelado dinamicamente,
exceto que o torque substitui a força e o deslocamento angular substitui o deslocamento em translação. Os
componentes mecânicos são os mesmos exceto o movimento de rotação e não mais translação.
Pág. 10
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
ELEMENTO DE INÉRCIA
T(t) = Jα (t) = J
Onde:
dω(t)
d 2θ(t)
=J
dt
dt 2
J – Momento de inércia;
T(t) – Torque aplicado;
θ(t) – Deslocamento angular.
α(t) – Aceleração angular;
ω(t) – Velocidade angular.
Elemento de Amortecimento (Amortecedor)
T(t) = D(θ& 1 (t) − θ& 2 (t)) , onde θ& 1 (t) é a velocidade angular entrada e θ& 2 (t) é a velocidade angular de saída do
elemento amortecedor.
Elemento de Elasticidade (Mola)
T(t) = K(θ1 (t) − θ2 (t)) , onde θ1(t) e θ2(t) é posicionamento angular entrada e saída respectivamente.
A tabela a seguir mostra os componentes e as relações entre torque e velocidade angular, como entre torque
e deslocamento angular. Assim como procedemos com os outros sistemas os componentes sunbetidos ao
movimento de rotação apresenta as seguintes equações.
Pág. 11
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Componente
Torque velocidade
angular
Torque deslocamento
angular
Impedância
Zm(s) = T(s) / θ(s)
Mola
Amortecedor
viscoso
Inércia
Nota: Os seguintes conjuntos de símbolos e unidades são usadas ao longo deste livro: T ( t ) =
N.m (newton.metro), Θ( t ) = rad (radianos), ω( t ) = rad/s (radianos /segundo), K =N.m /rad
(newton.metro / radiano), D ν = N.m.s/ rad (newton.metro.segundo/ radiano), J =kg.m2
(quilograma.metro2 = newton.metro.segundo2 / radiano).
O termo massa foi substituído por inércia. Os valores K,D e J são chamados respectivamente de constante de
mola, coeficiente de atrito viscoso e momento de inércia. O conceito de gráu de liberdade é válido, com
exceção que testamos um ponto de movimento por meio de uma rotação, mantendo-se todos os outros
pontos de movimento parados. O número de pontos de movimento que podem ser submetidos a
deslocamentos angulares, enquantpo se mantêm parados todos os demais é igual ao número de equações de
movimento necessário para descrever o sistema. Escrever as equações de movimento para sistemas em
rotação é semelhante a escrevê-las para os sistemas em translação, sendo a diferença é que o corpo livre
consiste em torque ao invés de forças. Também aqui aplica-se o princípio da superposição de movimento,
onde primeiro giramos um corpo mantendo-se parado todos os demais e pondo no diagrama de corpo livre
todos os torques devidos ao próprio movimento. Em seguida, mantendo-se o corpo parado, giramos os
pontos de movimento adjacentes, um a um, e acrescentamos os torques devidos ao movimento adjacente ao
Pág. 12
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
corpo livre. O processo é repetido para cada um dos pontos de movimento. Para cada um dos diagramas de
corpo livre, estes torques são somados e igualados a zero para formar as equações de movimento.
Exercício: Obter a função de transferência do sistema mecânico em rotação θ2(s)/T(s). O eixo elástico é
suspenso por meio de mancais em cada uma das extremidades e é submetido á torção. Um torque é aplicado
à esquerda e o deslocamento angular é medido à direita. A figura a seguir mostra em a) o sistema físico, em
b) o esquemae em c) o diagrama de blocos.
Primeiramente a partir da figura a) o sistema físico deve-se obter o diagrama esquemático do sistema físico.
A torção atua como uma mola concentrada em um ponto do eixo, com uma inércia J1 à esquerda (entrada) e
uma inércia J2 à direita (saída). Assim o diagrama esquemático é apresentado na figura b). Há dois gráus de
liberdade, uma vez que cada inércia pode girar enquanto a outra permanece parada. Portanto teremos duas
equações simultãneas para resolver o sistema.
Em seguida, desenha-se o diagrama do corpo livre de J1, usando superposição. A figura a) mostra os torques
sobre J1 se J2 for mantida parada e J1 girar. A figura b) mostra os torques J1 e J2 se J1 for mantida parada e J2
girar. Finalmente, a soma das figuras a) e b) mostrada na figura c) o diagrama do corpo livre final para J1.
T(s) = (J1s 2 + Ds + K)θ1 (s) − Kθ2 (s)
Pág. 13
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
Em relação a J2 devidos ao movimento de J2 será a mesma análise utilizada para J1. O diagrama do corpo
livre para J2 é apresentado a seguir.
− Kθ1 (s) + (J 2s 2 + Ds + K)θ2 (s) = 0
As duas equações tiramos a relação θ2(s)/T(s) sendo a função de transferência.
(J s
a
2
1
)
+ D1s + k θ1( s ) − kθ 2( s ) = T( s )
(
b
)
− kθ1( s ) + J 2 s + D2 s + k θ 2( s ) = 0
θ1(s ) =
θ 2( s )
T( s )
=
bθ 2 ( s )
k
2
substituindo temos →
k
ou
ab − k 2
abθ 2 ( s )
k
− kθ 2( s ) = T( s )
1
θ2 (s)
=
T(s) ab − K
K
ANALOGIA ENTRE SISTEMAS ELÉTRICOS E MECÂNICOS
Entre os sistemas elétricos e mecânicos, existem dois tipos de analogias:
•
•
Analogia Força-Tensão;
Analogia Força-Corrente.
Pág. 14
Prof. Luís Caldas
Simulação de Processo em Eng. de Materiais
Diisciplina - MR0720
a) Analogia Força-Tensão
Abaixo é mostrado as grandezas análogas entre os sistemas Elétricos e Mecânicos para este caso.
Sistema Elétrico
Sistema mecânico
Sistema mecãnico
De translação
De rotação
Tensão elétrica V(t)
Força f(t)
Torque T(t)
Indutância L
Massa M
Momento de Inércia J
Resistência R
Coefic. de atrito fv
Coef. de atrito D
Inverso da Capacitância 1/C Coef. de elasticidade K
Coef. de elasticidade K
Carga elétrica q
Deslocamento x(t)
Desloc. angular θ(t)
Corrente elétrica i(t)
Velocidade dx(t)/dt
Veloc. angular dθ(t)/dt = ω(t)
b) Analogia Força-Corrente
Sejam os sistemas elétricos e mecânicos, abaixo representados.
Sistema Elétrico
Sistema mecânico
Sistema mecãnico
De translação
De rotação
Corrente elétrica i(t)
Força f(t)
Torque T(t)
Capacitãncia C
Massa M
Momento de Inércia J
Inverso da Resistência 1/R
Coefic. de atrito fv
Coef. de atrito D
Inverso da Indutância 1/L Coef. de elasticidade K Coef. de elasticidade K
Deslocamento x(t)
Fluxo magnético φ(t)
Desloc. angular θ(t)
Referências:
Nize, Norman S. – Engenharia de Sistemas de Controle – 3.a edição LTC -2002.
Hey, L.H. – Apostila de Sistema de Controle I – 1997.
Pág. 15