Capı́tulo 1
Introdução
O Método dos Elementos Finitos (MEF) é hoje em dia a técnica numérica mais popular
para a resolução de problemas de Mecânica Estrutural. Muito dessa popularidade e
utilização generalizada se deve à sua simplicidade, robustez e elegância conceptual.
O MEF é uma técnica numérica bastante versátil e fácil de adaptar a diferentes tipos
de elementos estruturais e variados regimes de comportamento. Permite modelar com
simplicidade estruturas com geometria, condições de apoio e carregamentos perfeitamente gerais.
No entanto, a utilização do MEF está associada à obtenção de soluções aproximadas
onde não vêm verificadas de forma local as condições de equilı́brio, tanto no domı́nio,
quanto na fronteira. Pode desta forma dizer-se que o MEF conduz a soluções que
estão contra a segurança. Desta forma, esta ferramenta deve ser utilizada sempre com
bastante cuidado e deve ser sempre efectuada uma análise crı́tica cuidada dos resultados
obtidos.
Neste documento é discutida a aplicação do MEF na resolução de problemas de pórticos
planos. Está completamente fora do âmbito deste texto efectuar uma apresentação
detalhada e formalmente completa do Método dos Elementos Finitos. O principal
objectivo deste documento corresponde a mostrar como a aplicação dos procedimentos
gerais discutidos anteriormente na análise de outro tipo de elemento estrutural (peças
lineares sujeitas apenas a carregamento axial) conduz à formulação de elementos finitos
para a análise de pórticos planos. Pretende-se ainda sublinhar o significado fı́sico de
todos os procedimentos e cálculos e alertar para a necessidade de se efectuar uma
análise crı́tica cuidada das soluções obtidas.
Esta apresentação não dispensa a consulta de livros de texto onde esta matéria é
apresentada de forma mais completa e geral. Existem disponı́veis excelentes livros
para a iniciação ao estudo do MEF, dos quais são exemplo os que se apresentam nas
referências [2, 3, 4, 5].
Este documento encontra-se organizado em oito capı́tulos. Depois deste capı́tulo de
1
2
CAPÍTULO 1. INTRODUÇÃO
introdução, as grandezas - deslocamentos, deformações, esforços e cargas - envolvidas
na caracterização do comportamento de elementos de viga e as equações que as permitem relacionar - condições de compatibilidade, relações constitutivas e condições de
equilı́brio são apresentadas e discutidas de forma detalhada. Neste capı́tulo apenas
se consideram carregamentos constituı́dos por cargas perpendiculares ao eixo da peça
linear. Apresenta-se primeiro a teoria de vigas que permite ter em consideração a deformação por corte, a qual passará a ser designada por teoria de vigas de Timoshenko.
Depois é apresentada e discutida a formulação que não considera a deformação por
corte, designada doravante por teoria de vigas de Euler Bernoulli. Esta é a teoria usualmente considerada na análise de peças lineares correntes em Engenharia Civil, uma
vez que a deformação por corte só é relevante quando a relação vão/altura da secção
transversal é muito pequena.
No terceiro capı́tulo é apresentada a formulação de Elementos Finitos que permite
determinar a solução aproximada para problemas de vigas de Euler-Bernoulli. Numa
primeira fase é discutida a definição da aproximação para o campo de deslocamentos
em cada um dos elementos em que se considera discretizada a estrutura em estudo.
Calcula-se de seguida a matriz de rigidez elementar e é identificado o significado fı́sico de
cada uma das suas componentes. É analisada depois a construção do vector das forças
nodais equivalentes elementares e discutido o significado fı́sico de cada uma das parcelas
determinadas. Um conjunto de exemplos de aplicação permite ilustrar a aplicação do
MEF na análise de problemas de vigas sem deformação por corte e caracterizar o tipo
de solução que se consegue obter com recurso a esta técnica numérica. São recordadas
nesta fase as caracterı́sticas gerais das soluções aproximadas obtidas com recurso ao
método dos elementos finitos.
No quarto capı́tulo é apresentada a formulação que permite aplicar o método dos
elementos finitos na resolução de pórticos planos. Numa primeira secção salienta-se
que o conjunto de grandezas e equações com que é necessário trabalhar corresponde à
reunião das grandezas e equações que foram tratadas no caso das peças lineares com
carregamento axial (designadas por barras) e no caso das vigas de Euler-Bernoulli.
Considera-se de novo neste capı́tulo que a deformação por corte é desprezada na análise
deste tipo de estruturas. Depois de se definirem as aproximações para os campos de
deslocamentos e as expressões para as matrizes de rigidez elementares e para o vector
das forças nodais equivalentes, é definida a mudança de referencial que permite passar a
ser considerado o referencial global da estrutura em vez do referencial local associado a
cada um dos elementos finitos existentes na discretização. Esta mudança de referencial
é essencial quando se pretende analisar estruturas constituı́das por peças lineares com
orientações diferentes. Um exemplo de aplicação é apresentado e discutido no final
deste capı́tulo.
No capı́tulo cinco é apresentada a formulação de elementos finitos para a análise de
vigas de Timoshenko. A importância da informação apresentada neste capı́tulo está
associada aos seguintes dois aspectos. Por uma lado, sempre que a viga em análise for
espessa, ou seja, sempre que a relação vão/altura da secção transversal seja pequena,
a deformação por corte pode ser importante na caracterização do comportamento do
3
elemento estrutural e deve ser utilizada a teoria de vigas de Timoshenko na análise
do problema. Por outro lado, a consideração da deformação por corte vem facilitar
de forma bem visı́vel a construção da aproximação para os campos de deslocamentos
em cada um dos elementos finitos. Este aspecto será de grande importância quando
se formular o método dos elementos finitos para a análise de lajes. A consideração
da deformação por corte vai permitir definir aproximações muito mais simples para os
campos de deslocamentos do que as que teriam de ser consideradas caso se considere a
teoria de lajes sem deformação por corte.
O capı́tulo cinco começa com a definição da aproximação para os campos de deslocamentos em cada um dos elementos da malha. Discute-se depois a construção da
matriz de rigidez elementar e do vector das forças nodais equivalentes elementares. O
significado fı́sico de cada um destes operadores é discutido com detalhe. A análise
de uma estrutura simples vai permitir ilustrar a aplicação do método dos elementos
finitos na análise de vigas de Timoshenko. A análise crı́tica dos resultados obtidos
vai permitir identificar de novo as caracterı́sticas de uma solução aproximada obtida
com esta técnica numérica. O mesmo exemplo vai ser ainda utilizado para estudar a
convergência das soluções aproximadas obtidas.
O capı́tulo dedicado ao estudo das vigas de Timoshenko termina com a discussão de um
fenómeno que pode surgir quando se analisam peças lineares com secções rectangulares
de altura reduzida. Este fenómeno, conhecido por ”shear locking ou por travamento
por corte, é responsável, quando surge, pela obtenção de soluções aproximadas completamente erradas. Felizmente, a adopção de um procedimento simples permite evitar
o aparecimento de tal fenómeno. Antes de se apresentar e discutir este remédio, é
necessário entender a razão pela qual este fenómeno pode surgir.
No capı́tulo seis, o método dos elementos finitos é utilizado na resolução de problemas de vigas de Euler-Bernoulli em fundação elástica. Este tipo de problemas ocorre
com alguma frequência em Engenharia Civil; basta recordar por exemplo as vigas de
fundação ou o caso dos carris dos caminhos de ferro.
As grandezas envolvidas na caracterização do comportamento destes elementos estruturais são em tudo semelhantes às que estamos habituados a lidar no caso dos elementos
de viga de pórticos planos. No entanto, na equação diferencial que rege o comportamento deste tipo de estruturas surge um termo adicional que está associado à reacção
vertical exercida pela fundação sobre a viga.
Esta alteração que à primeira vista parece pouco significativa, vai implicar uma alteração substancial no modo de funcionamento deste tipo de estruturas. Como se verá
numa primeira fase, a resolução analı́tica deste tipo de problemas é bem mais complicada e pesada que a que usualmente se aplica na solução de problemas correntes de
vigas, mesmo que se considerem condições de apoio e carregamento bem simples.
Depois de apresentadas as equações que regem o comportamento deste tipo de estrutura, é descrita a forma através da qual se pode determinar a solução analı́tica exacta.
Rapidamente se concluirá que esta forma de efectuar os cálculos é muito trabalhosa e
4
CAPÍTULO 1. INTRODUÇÃO
por vezes bem difı́cil de um ponto de vista de tratamento matemático das equações. É
depois apresentada a formulação de elementos finitos que permite determinar soluções
aproximadas na análise destes problemas. A grande diferença corresponde ao termo
adicional que se torna necessário incluir na definição da matriz de rigidez elementar.
Um conjunto de exemplos vai permitir ilustrar a aplicação do método dos elementos
finitos na análise deste tipo de elementos estruturais.
A determinação de frequências próprias e modos de vibração de vigas de Euler-Bernoulli
é discutida no capı́tulo sete. As equações que regem o comportamento destes elementos
estrutuais são reescritas por forma a ter em conta a influência das forças de inércia.
Depois de apresentadas estas equações, discute-se a forma através da qual o MEF
pode conduzir à definição de um problema de valores e vectores próprios que conduz à
determinação dos modos de vibração e respectivas frequências. Para além da matriz de
rigidez elementar com a constitução já conhecida anterioremnte, vai surgir a definição
de uma matriz de massas elementar, a qual vai assumir um papel importante nos
cálculos a efectuar. Este capı́tulo termina com a apresentação e discussão de um
conjunto de exemplos de aplicação, onde mais uma vez ressalta o carácter aproximado
desta técnica numérica.
No capı́tulo oito é discutida a aplicação do MEF no desenvolvimento de análises lineares
de estabilidade de vigas de Euler-Bernoulli. Pretende determinar-se cargas crı́ticas e
modos de instabilidade com base na consideração de efeitos geometricamente nãolineares. São numa primeira fase apresentadas as equações que permitem efectuar este
tipo de análise e depois é desenvolvida a formulação de elementos finitos que permite
determinar soluções aproximadas para as grandezas que se pretende obter. Para a
construção do problema de valores e vectores próprios que conduz à determinação
de modos de encurvadura e respectivas cargas crı́ticas, vai ser necessário definir uma
matriz de rigidez geométrica, para além da matriz de rigidez habitual em elementos
finitos.
Capı́tulo 2
Análise de vigas - Formulação do
problema
2.1
Introdução
Neste capı́tulo apresenta-se o conjunto de grandezas e de equações que permite caracterizar o comportamento de vigas. Considera-se como viga uma peça linear rectilı́nea
sujeita apenas a flexão. As forças exteriores actuam perpendicularmente ao eixo da
peça linear, não sendo consideradas quaisquer forças actuantes com componentes não
nulas segundo a direcção desse eixo.
Ao longo de todo este trabalho consideram-se as seguintes hipóteses:
• Linearidade fı́sica
• Linearidade geométrica
• Homogeneidade e isotropia do material estrutural
A hipótese da linearidade fı́sica corresponde a assumir para o material um comportamento elástico linear. Este facto simplifica as relações constitutivas, permitindo o
estabelecimento de uma relação linear entre esforços e deformações.
A linearidade geométrica inclui a hipótese dos pequenos deslocamentos e das pequenas
deformações. É a hipótese que permite que as condições de equilı́brio possam ser
estabelecidas com base na configuração indeformada da estrutura.
Numa primeira secção é a apresentada a teoria de vigas de Timoshenko, a qual permite
ter em consideração o efeito da deformabilidade por corte. Depois de apresentados os
campos de deslocamentos, de deformações e de esforços que são necessários para a caracterização do comportamento destes elementos estruturais, são discutidas as equações
5
6
CAPÍTULO 2. ANÁLISE DE VIGAS - FORMULAÇÃO DO PROBLEMA
que as permitem relacionar: equações de compatibilidade, equilı́brio e elasticidade. Para
não tornar esta discussão demasiadamente extensa, a apresentação será efectuada de
forma sucinta, havendo no entanto sempre o cuidado de salientar o significado fı́sido
de cada uma das grandezas e operadores intervenientes.
Na segunda secção é apresentada a teoria de vigas de Euler-Bernoulli, na qual se
despreza a deformabilidade por corte. Esta é a formulação que é normalmente considerada quando se pretendem analisar estruturas correntes na área da Engenharia Civil. A
adopção da formulação de vigas de Timoshenko só se justifica quando a relação vão da
peça/altura da secção transversal é muito pequena ou quando se pretende simplificar
a formulação de elementos finitos para a análise deste tipo de estruturas. Este último
aspecto apenas ficará claro depois da leitura do capı́tulo 5.
É possı́vel verificar que a teoria de vigas de Euler-Bernoulli pode ser considerada como
um caso limite da teoria de Timoshenko. As duas teorias tendem a fornecer uma mesma
solução quando a relação vão/altura da peça aumenta. Nestas situações, a deformação
por corte passa a ser desprezável e os resultados obtidos com recurso a estas duas
formulações distintas tendem a coincidir.
A consulta dos elementos de estudo da disciplina de Resistência de Materiais permite
aprofundar os tópicos discutidos neste capı́tulo.
2.2
Vigas de Timoshenko
Na teoria de vigas de Timoshenko, admite-se que:
H1 Secções planas inicialmente perpendiculares ao eixo da peça permanecem planas
após a deformação do elemento estrutural, mas não necessariamente perpendiculares a
esse eixo.
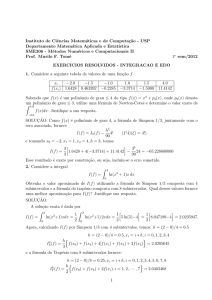
Esta hipótese encontra-se ilustrada na figura 2.1. É a variação do ângulo formado entre
a secção transversal e o eixo da peça que permite o aparecimento de deformações de
corte, aqui designadas por γ. Admite-se que todos os pontos pertencentes a uma mesma
secção transversal plana apresentam o mesmo valor para o deslocamento na direcção z,
o qual é designado por deslocamento transversal, w(x). A rotação da secção transversal
plana em torno do eixo y é denotada por θ(x).
2.2.1
Campos de deslocamentos
O campo de deslocamentos numa secção da viga é definido de forma única se se conhecer o valor do deslocamento transversal, w(x), e o valor da rotação θ(x). Como foi atrás
referido, estes deslocamentos correspondem aos dois movimentos da secção transversal
identificados na figura 2.1
2.2. VIGAS DE TIMOSHENKO
7
Figura 2.1: Ilustração da hipótese de Timoshenko
A análise da figura 2.1 permite ainda concluir que, dada a existência da deformação
por corte, γ, o valor da rotação θ(x) não pode ser determinada directamente a partir do
conhecimento da inclinação do eixo da peça, definida pela grandeza dd wx . Para caracterizar o campo de deslocamentos numa viga de Timoshenko é necessário considerar duas
grandezas independentes, as quais correspondem ao campo de deslocamentos, w(x), e
ao campo de rotações, θ(x).
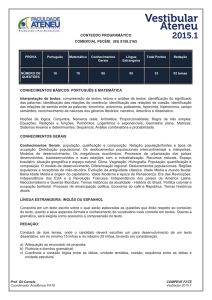
De acordo com a figura 2.2, o valor das translacções ux (x, y, z) e uz (x, y, z) num ponto
qualquer da secção transversal de coordenada x é determinado através das igualdades:
2.2.2
ux (x, y, z) = z θ(x)
(2.1)
uz (x, y, z) = w(x)
(2.2)
Campos de deformações
Para caracterizar a mudança de geometria que pode ocorrer num elemento de viga,
são necessários dois campos de deformação independentes: um para caracterizar a
deformação por flexão, o outro para caracterizar a deformação por corte.
Para existir deformação por flexão, é necessário que as fibras longitudinais (fibras com
a direcção do eixo da peça) sofram extensões axiais. É possı́vel definir as extensões
axiais em função dos deslocamentos. Tem-se desta forma:
εxx =
d θ(x)
∂ux (x, y, z)
=z
∂x
dx
(2.3)
8
CAPÍTULO 2. ANÁLISE DE VIGAS - FORMULAÇÃO DO PROBLEMA
Figura 2.2: Campos de deslocamentos numa viga de Timoshenko
A equação 2.3 permite verificar que a existência de valores não nulos para o campo de
extensões εxx , e por consequência a existência de deformações por flexão, obriga a que
a derivada do campo de rotações ao longo do eixo da peça varie. Caso o campo de
rotações seja nulo ou constante, não há qualquer deformação por flexão. A equação 2.3
permite ainda verificar que quanto maior for o valor de d dθ(x)
maior será a deformação
x
por flexão.
À grandeza que caracteriza o comportamento da peça à flexão é usual chamar curvatura,
a qual é definida pela igualdade:
χ(x) =
d θ(x)
dx
(2.4)
Para caracterizar a deformação por corte, é necessário determinar a variação angular
de duas fibras inicialmente perpendiculares e dispostas segundo as direcções x e z,
respectivamente. A deformação correspondente, que aqui vai ser considerada como a
deformação por corte pretendida, γ(x), é dada pela igualdade:
γ(x) = γxz =
∂ux (x, y, z) ∂uz (x, y, z)
+
∂z
∂x
= θ(x) +
2.2.3
d w(x)
dx
(2.5)
(2.6)
Campos de esforços
Na figura 2.3 representam-se os esforços que intervêm na caracterização do comportamento da secção transversal de uma viga.
2.2. VIGAS DE TIMOSHENKO
9
Figura 2.3: Campos de esforços numa viga
Os campos de esforços correspondem a resultantes das componentes do tensor das
tensões definidas ao longo da secção transversal. O momento flector M (x) corresponde
à resultante dos momentos provocados pela componente σxx (x, y, z):
Z
M (x) =
Ω
z σxx (x, y, z) dΩ
(2.7)
A integração na secção transversal da componente σxz (x, y, z) dá origem ao esforço
transverso V (x):
Z
V (x) =
2.2.4
Ω
σxz (x, y, z) dΩ
(2.8)
Condições de compatibilidade
As condições de compatibilidade no domı́nio permitem relacionar os campos de deformações com os campos de deslocamentos. Tendo em conta as equações (2.4) e (2.6),
é possı́vel escrever:
d θ(x)
dx
χ(x) =
(2.9)
γ(x) = θ(x) +
d w(x)
dx
(2.10)
As condições de compatibilidade podem ser escritas no seguinte formato matricial:
"
χ(x)
γ(x)
#
d
dx
=
1
0 " θ(x) #
d w(x)
dx
(2.11)
A equação (2.11) permite identificar de imediato o operador diferencial de compatibilidade, [A], que desempenha um papel importante no desenvolvimento da formulação
de elementos finitos. Tem-se para o caso das vigas de Timoshenko:
d
dx
[A] =
1
0
d
dx
(2.12)
10
CAPÍTULO 2. ANÁLISE DE VIGAS - FORMULAÇÃO DO PROBLEMA
2.2.5
Relações de elasticidade
As relações de elasticidade permitem estabelecer a relação existente entre os campos
de esforços e os campos de deformações instalados na viga.
O desenvolvimento da equação (2.7) conduz a:
Z
M (x) =
Ω
z σxx (x, y, z) dΩ
(2.13)
z E εxx (x, y, z) dΩ
(2.14)
Z
=
Ω
Substituindo na igualdade anterior a definição (2.3) obtém-se:
Z
M (x) =
Ω
= E
z 2 E χ(x) dΩ
(2.15)
Z
Ω
z 2 dΩ χ(x)
M (x) = EI χ(x)
(2.16)
(2.17)
onde E corresponde ao módulo de elasticidade do material e I denota o momento de
inércia da secção transversal.
A definição apresentada na equação (2.8) para o esforço transverso permite escrever:
Z
V (x) =
Ω
σxz (x, y, z) dΩ
(2.18)
G γxz (x, y, z) dΩ
(2.19)
G γ(x) dΩ
(2.20)
Z
=
Ω
Z
=
Ω
V (x) = G A γ(x)
(2.21)
Nas equações anteriores, G correponde ao módulo de distorção, o qual é definido por:
G=
E
2 (1 + ν)
(2.22)
onde ν corresponde ao coeficiente de Poisson do material estrutural.
Na obtenção da equação (2.21) considerou-se de forma incorrecta que existe uma distribuição uniforme de tensões tangenciais σxz ao longo da secção transversal. É possı́vel
verificar que tal não é possı́vel, tendo em conta as equações de equilı́brio da elasticidade
tridimensional. Assim sendo, é necessário introduzir na relação constitutiva (2.21) um
factor correctivo que visa ter em conta a não-uniformidade da distribuição daquelas
tensões tangenciais. É por essa razão que a área da secção transversal, A, é substituı́da
pela área reduzida de corte, Ac , a qual pode ser definida através de:
Ac = κA
(2.23)
2.2. VIGAS DE TIMOSHENKO
11
A relação constitutiva (2.21) transforma-se então em:
V (x) = G Ac γ(x)
(2.24)
Para secções rectangulares, é usual utilizar o valor de 5/6 para o factor de forma κ.
As relações constitutivas podem ser escritas num formato matricial. Tendo em conta
as equações (2.17) e (2.24), tem-se:
"
M (x)
V (x)
#
=
EI
0
0
GAc
"
#
χ(x)
γ(x)
(2.25)
A equação (2.25) permite identificar o operador elástico, [D], o qual será utilizado no
desenvolvimento da formulação de elementos finitos. Tem-se para o caso das vigas de
Timoshenko:
EI
0
[D] =
(2.26)
0 GAc
2.2.6
Equações de equilı́brio
As condições de equilı́brio no domı́nio estabelecem as relações que devem existir entre
os campos de esforços e os carregamentos de vão aplicados. Para se estabelecerem as
condições de equilı́brio, considere-se o diagrama de corpo livre de um troço infinitesimal
de viga, tal como se encontra ilustrado na figura 2.4. Como carregamentos consideramse cargas transversais e momentos distribuı́dos aplicados. Como o troço considerado é
infinitesimal, é possı́vel considerar que as cargas são constantes no intervalo considerado.
Figura 2.4: Diagram de corpo livre de um troço infinitesimal de viga
O estabelecimento da condição de equilı́brio na direcção vertical permite obter:
X
dV
dx) − p dx = 0
(2.27)
dx
Simplificando a equação anterior, obtém-se a primeira das condições de equilı́brio:
Fv = 0 ⇒ V − (V +
d V (x)
+ p(x) = 0
dx
(2.28)
12
CAPÍTULO 2. ANÁLISE DE VIGAS - FORMULAÇÃO DO PROBLEMA
Impondo que o momento resultante calculado em relação ao extremo inicial do troço
infinitesimal se deve anular, é possı́vel escrever:
X
M =0⇒M+
dV
dx
dM
d x − M + m dx − V dx −
dx dx − p dx
=0
dx
dx
2
(2.29)
Desprezando infinitésimos de ordem superior, a segunda das condições de equilı́brio
pode ser escrita no formato:
d M (x)
+ m(x) − V (x) = 0
dx
(2.30)
As condições de equilı́brio podem ser escritas matricialmente na forma:
d
dx
2.2.7
0
−1 " M (x) # " m(x) # " 0 #
+
=
d V (x)
p(x)
0
dx
(2.31)
Equação da viga e condições de fronteira
A solução exacta para uma viga de Timoshenko deve satisfazer em simultâneo as
condições de equilı́brio, elasticidade e equilı́brio no domı́nio. Deve também satisfazer todas as condições de fronteira.
As condições de fronteira podem ser de dois tipos: as condições de fronteira cinemática,
nas quais se especifica qual o valor dos deslocamentos numa determinada fronteira, e
as condições de fronteira estática, as quais passam pela imposição de um determinado
valor para as cargas directamente aplicadas nessa fronteira.
Considera-se que as extremidades da viga se podem encontrar encastradas, apoiadas
ou livres.
Figura 2.5: Tipos de apoio a considerar
Numa extremidade encastrada há duas condições de fronteira cinemática a verificar.
O deslocamento transversal e a rotação devem ser nulos. Se esse apoio se verificar no
2.3. VIGAS DE EULER-BERNOULLI
13
nó inicial, é possı́vel escrever:
w(x = 0) = 0 ,
θ(x = 0) = 0
(2.32)
Numa extremidade apoiada, o deslocamento transversal deve ser nulo e o momento
flector deve ser igual ao momento concentrado que eventualmente aı́ esteja aplicado.
Particularizando de novo para o nó inicial é possı́vel escrever:
w(x = 0) = 0 ,
M (x = 0) = m
(2.33)
Finalmente, numa extremidade livre especificam-se duas condições de fronteira estática.
O momento flector e o esforço transverso devem ser iguais às cargas concentradas que
nessa secção possam estar aplicadas. Escreve-se:
V (x = 0) = f
,
M (x = 0) = m
(2.34)
Problema 2.1 Estabeleça as condições de fronteira a considerar caso se considere um
encastramento deslizante.
2.3
Vigas de Euler-Bernoulli
Na teoria de vigas de Euler-Bernoulli, é usual admitir que:
H2 Secções planas inicialmente perpendiculares ao eixo da peça permanecem planas e
ainda perpendiculares a esse eixo após a deformação do elemento estrutural.
Esta hipótese encontra-se ilustrada na figura 2.6, onde também se identifica o deslocamento transversal w(x) e a rotação da secção transversal, θ(x). Como a secção
transversal permanece perpendicular ao eixo da peça após deformação, o valor da distorção γxz é nula, sendo nula por consequência a deformação por corte.
2.3.1
Campos de deslocamentos
O campo de deslocamentos numa secção da viga de Euler-Bernoulli é definido de forma
única se se conhecer o valor do deslocamento transversal, w(x), e da rotação θ(x). Estes
deslocamentos encontram-se representados na figura 2.6.
Tendo em conta que não há deformação por corte, ou seja, a secção transversal plana
permanece perpendicular ao eixo da peça, é possı́vel verificar que o valor da rotação
θ(x) é em valor absoluto igual ao valor da inclinação do eixo da peça, definido pela
derivada do campo de deslocamentos transversais, dd wx .
14
CAPÍTULO 2. ANÁLISE DE VIGAS - FORMULAÇÃO DO PROBLEMA
Figura 2.6: Hipóteses de Bernoulli
Esta relação pode ser obtida se na equação (2.6) se considerar como nula a deformação
por corte. Tem-se, nesse caso:
γ(x) = 0 ⇒ 0 = θ(x) +
Obtém-se desta forma:
θ(x) = −
d w(x)
dx
dw(x)
dx
(2.35)
(2.36)
A equação (2.36) permite verificar que na caracterização do comportamento de uma
viga de Euler-Bernoulli apenas é necessário definir um campo de deslocamentos independente, o campo de deslocamentos transversais w(x). A equação para o campo de
rotações θ(x) é determinada pela aplicação directa de (2.36).
2.3.2
Campos de deformações e de esforços
Nas vigas de Euler-Bernoulli os campos de deformações e de esforços que é necessário
considerar são em tudo semelhantes aos que foram considerados no caso das vigas de
Timoshenko. Exceptua-se como é claro o caso da deformação por corte, γ(x), que na
teoria de Euler-Bernoulli não é considerada.
2.3.3
Condições de compatibilidade
A relação entre o campo de curvaturas e o campo de deslocamentos na viga de EulerBernoulli pode ser expressa, tal como no caso das vigas de Timoshenko, através da
2.3. VIGAS DE EULER-BERNOULLI
15
equação (2.4). No entanto, e tendo em conta a equação (2.36), é possı́vel escrever uma
equação que relaciona directamente o campo de curvaturas com o campo de deslocamentos transversais. Essa equação é definida por:
χ(x) =
d2 w(x)
d θ(x)
=−
dx
d x2
(2.37)
As condições de compatibilidade podem ser escritas matricialmente no formato:
h
χ(x)
i
·
=
¸h
d2
− 2
dx
w(x)
i
(2.38)
É então possı́vel verificar que no caso da teoria de vigas de Euler-Bernoulli o operador
diferencial de compatibilidade é dado por:
·
d2
− 2
dx
[A] =
2.3.4
¸
(2.39)
Relações de elasticidade
A relação entre os campos de momentos flectores, M (x), e os campos de curvaturas,
χ(x), é em tudo semelhante à que se obteve para o caso das vigas de Timoshenko.
Recorde-se que:
M (x) = EI χ(x)
(2.40)
Dado que neste tipo de formulação não se considera a deformação por corte, a determinação do campo de esforços transversos, V (x) não pode ser efectuada directamente
através da aplicação das relações de elasticidade. Nas vigas de Euler-Bernoulli, a determinação do campo de esforços transversos passa necessariamente pela utilização da
condição de equilı́brio (2.30)1 .
As relações constitutivas no caso das vigas de Euler-Bernoulli podem vir expressas
matricialmente na forma:
h
M (x)
i
=
h
EI
ih
χ(x)
i
(2.41)
O operador elástico é dado no caso da teoria das vigas de Euler-Bernoulli por:
[D] =
1
h
EI
i
(2.42)
Este tipo de situação é semelhante ao que se passa no caso das barras axialmente indeformáveis.
Recorde-se que na análise de uma barra com estas caracterı́sticas, a obtenção do correspondente valor
para o esforço normal passa necessariamente pela utilização de equações de equilı́brio
16
CAPÍTULO 2. ANÁLISE DE VIGAS - FORMULAÇÃO DO PROBLEMA
2.3.5
Condições de equilı́brio
As condições de equilı́brio relacionam os campos de esforços na viga, M (x) e V (x),
com as cargas aplicadas, p(x).
d M (x)
= V (x)
dx
(2.43)
d V (x)
+ p(x) = 0
dx
(2.44)
Frequentes vezes, as duas condições de equilı́brio acima indicadas são transformadas
numa equação apenas:
d2 M (x)
+ p(x) = 0
(2.45)
dx2
É possı́vel escrever matricialmente a equação (2.45). Tem-se, nesse caso:
·
2.3.6
d2
d x2
¸h
M (x)
i
+
h
p(x)
i
=
h
0
i
(2.46)
Equação da viga e condições de fronteira
É possı́vel efectuar a junção das condições de equilı́brio, compatibilidade e elasticidade
na obtenção de uma única equação. Obtém-se:
d4 w(x)
p(x)
=
4
dx
EI
(2.47)
Esta é a equação diferencial que rege o comportamento da viga quando se assumem as
hipóteses de Euler-Bernoulli.
A consideração da equação diferencial no domı́nio não permite, por si só, que se consiga determinar a solução da viga. Para que a análise se possa efectuar, torna-se
indispensável que se especifiquem as condições de fronteira.
O conjunto de condições de fronteira a considerar no caso da teoria de vigas de EulerBernoulli é em tudo semelhante ao que foi apresentado na secção 2.2.7.
Capı́tulo 3
Análise de vigas de Euler-Bernoulli
Neste capı́tulo é discutida a aplicação do método dos elementos finitos (MEF) na
resolução de problemas de vigas de Euler-Bernoulli.
Na primeira secção é apresentada a formulação para o elemento finito de viga. Discutese de inı́cio a definição da aproximação para o campo de deslocamentos transversais
em cada elemento finito. Depois de definidas as funções de aproximação a utilizar, é
determinada a matriz de rigidez elementar e é salientado o significado fı́sico de cada um
dos seus termos. Esta secção termina com a discussão dos procedimentos que permitem
a determinação do vector das forças nodais equivalentes.
Na secção seguinte é apresentado e discutido de forma detalhada um exemplo de
aplicação no qual se aplica o MEF na análise de uma viga contı́nua. Neste primeiro
exemplo de aplicação apenas se consideram cargas aplicadas nos nós da estrutura.
Este exemplo vai servir para apresentar de forma detalhada todas as etapas de cálculo
envolvidas na aplicação do método dos elementos finitos.
Na terceira secção é efectuada a análise de uma viga simplesmente apoiada sujeita à
acção de uma carga uniformemente distribuı́da. Este exemplo vai permitir ilustrar a
melhoria que se consegue obter na solução aproximada quando se aumenta o número
de elementos finitos considerados na discretização da estrutura.
Por fim, é apresentado um terceiro exemplo de aplicação, o qual corresponde à análise
de uma segunda viga contı́nua. Neste caso existem cargas distribuı́das e cargas concentradas aplicadas.
3.1
Formulação do elemento finito de viga
A aplicação do Método dos Elementos Finitos requer que a estrutura seja discretizada.
Quer isto dizer que se deve dividir a estrutura em análise num conjunto de elemen17
18
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
tos de geometria simples e nos quais se define uma aproximação para o campo de
deslocamentos transversais.
Discute-se nesta secção a definição da aproximação para o campo de deslocamentos
transversais em cada elemento finito. Recorde-se que desde que se conheça a aproximação para o campo de deslocamentos transversais, w(x), a utilização das equações
de compatibilidade permite definir a aproximação para o campo de curvaturas χ(x) e
as relações constitutivas permitem definir a aproximação para o campo de momentos
flectores, M (x).
3.1.1
Definição da aproximação do campo de deslocamentos
Será que a utilização de um procedimento semelhante ao que foi seguido no caso das
barras (peças lineares submetidas apenas a carregamento axial) permite definir uma
aproximação adequada para o campo de deslocamentos transversais nos elementos de
viga?
A utilização de tal raciocı́nio levaria a definir uma aproximação linear para o campo de
deslocamentos envolvendo o valor dos deslocamentos transversais dos nós do elemento,
representados na figura 3.1. Essa aproximação seria escrita na forma:
w(x) = Ψ1 (x) w1 + Ψ2 (x) w2
(3.1)
x
x
) w1 + ( ) w2
L
L
(3.2)
= (1 −
Figura 3.1: Definição da aproximação do campo de deslocamentos transversais: tentativa 1
Será que a aproximação para o campo de deslocamentos transversais definida pela
equação (3.2) permite garantir a verificação de todas as condições de compatibilidade?
A resposta é desde já negativa. Antes de se avançar uma explicação formalmente mais
correcta, discuta-se a aproximação que se construiria para o campo de deslocamentos
transversais numa viga simplesmente apoiada sujeita a uma carga uniformemente distribuı́da se se considerasse uma discretização com dois elementos finitos. Tendo em
3.1. FORMULAÇÃO DO ELEMENTO FINITO DE VIGA
19
conta que em cada um dos elementos de barra a aproximação para o campo w é linear,
obter-se-ia a deformada representada na figura 3.2. Tendo em conta que entre duas
barras não podem existir rotações relativas a menos que exista uma libertação interna
que permita este tipo de movimento (o que não é o caso nesta estrutura), é possı́vel
concluir que a deformada apresentada não é possı́vel.
Figura 3.2: Problemas associados à definição de uma aproximação linear para o campo
de deslocamentos transversais
De um ponto de vista mais formal, como concluir que pode a deformada apresentada
na figura 3.3 não é compatı́vel? Para que o fosse seria necessário poder calcular o valor
da curvatura para qualquer uma das secções transversais da peça. Como o cálculo
das curvaturas exige a determinação da segunda derivada do campo de deslocamentos
transversais em todos os pontos do domı́nio, é necessário impor que o campo de deslocamentos e a sua primeira derivada (ou seja o campo de rotações) sejam contı́nuos
em todo o domı́nio da estrutura. Ora é fácil verificar que no exemplo apresentado o
campo de rotações é descontı́nuo entre os dois elementos finitos considerados na malha,
o que impossibilita a definição do valor da curvatura nessa secção da estrutura. Este
facto implica que a solução fornecida para o campo de deslocamentos não satisfaz as
necessárias condições de compatibilidade.
Sempre que no operador diferencial de compatibilidade definido para um determinado
tipo de elemento estrutural existam segundas derivadas, a verificação das condições
de compatibilidade obriga a que a aproximação garanta a continuidade dos campos de
deslocamentos e das duas primeiras derivadas, tanto no domı́nio de cada elemento finito
como ao longo de todas as fronteiras entre elementos. Este facto dificulta a definição
das funções de aproximação, sobretudo quando se começam a considerar domı́nios
bidimensionais. Dizem-se de classe C 1 (x) as funções contı́nuas com primeiras derivada
contı́nuas.
Para garantir a verificação das condições de continuidade do campo de deslocamentos e
das suas derivadas, tanto no domı́nio como nas fronteiras entre elementos adjacentes, é
necessário envolver na definição do campo de deslocamentos transversais, w(x), o valor
dos deslocamentos transversais nos nós de extremidade do elemento finito e o valor
20
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
das rotações nesses mesmos nós. O conjunto de deslocamentos nodais elementares em
função dos quais se escreve a aproximação para o campo de deslocamentos transversais
num elemento de viga de Euler-Bernoulli é o que se apresenta na figura 3.3.
Figura 3.3: Elemento finito de viga
A aproximação para o campo de deslocamentos transversais é expressa no seguinte
formato geral:
we (xe ) = ψ1 (xe )q1 + ψ2 (xe )q2 + ψ3 (xe )q3 + ψ4 (xe )q4
(3.3)
Cada uma das funções de aproximação utilizadas em (3.3) tem um significado fı́sico
Figura 3.4: Funções de aproximação para o elemento de viga de Euler-Bernoulli
claro: a função ψj (xe ) corresponde ao campo de deslocamentos transversais w(x) que
se desenvolve no elemento finito de viga quando se impõe o deslocamento nodal independente j com valor unitário, qj = 1, e se garante que os restantes são nulos, ou
3.1. FORMULAÇÃO DO ELEMENTO FINITO DE VIGA
21
seja, qk = 0, com k 6= j (e na ausência de quaisquer cargas de vão). Estas funções de
aproximação encontram-se representadas na figura 3.4. Nos cálculos que se efectuam
de seguida considera-se sempre o referencial local associado a cada elemento finito. A
origem desse referencial local corresponde sempre ao nó inicial do elemento, podendo
escrever-se que 0 ≤ xe ≤ L. Por simplicidade, e sempre que tal não possa originar
qualquer dúvida, omite-se o ı́ndice e na identificação do referencial local do elemento
finito.
Como definir cada uma das funções de aproximação? O primeiro passo para a sua
determinação corresponde à identificação do grau dessas funções. Tendo em conta que
se especifica para cada uma delas um conjunto de quatro condições (o valor que a função
e a sua primeira derivada tomam em cada uma das duas extremidades do elemento de
viga), cada função de aproximação corresponde a um polinómio do terceiro grau. Pode
escrever-se de forma genérica:
ψj (xe ) = a + b xe + c x2e + d x3e
(3.4)
As constantes a, b, c e d são determinadas tendo em conta o conjunto de restrições,
ou seja, de deslocamentos que são impostos na definição de cada uma das funções de
aproximação, ψj (x).
Para se determinar a função de aproximação ψ1 (x), recorde-se que este é o valor do
campo de deslocamentos que surge no elemento de viga quando se impõe a rotação
no nó inicial com valor unitário e se garante que os restantes deslocamentos nodais
elementares são nulos. Pode escrever-se:
w(x) = ψ1 (x) = a + b x + c x2 + d x3
θ(x) = −
d ψ1 (x)
= −b − 2 c x − 3 d x2
dx
(3.5)
(3.6)
As condições a considerar para a determinação das constantes são as seguintes:
w(0) = 0 ;
w(L) = 0 ;
θ(0) = 1.0 ;
θ(L) = 0
(3.7)
Tendo em conta as equações (3.5) e (3.6) é possı́vel escrever:
⇒ a + b 0 + c 02 + d 03 = 0
(3.8)
w(L) = 0 ⇒ a + b L + c L2 + d L3 = 0
(3.9)
θ(0) = 1
⇒ −b − 2 c 0 − 3 d 02 = 1.0
(3.10)
θ(L) = 0
⇒ −b − 2 c L − 3 d L2 = 0
(3.11)
(3.12)
w(0) = 0
A resolução do sistema de equações anterior permite determinar
{d → −L−2 , c →
2
, a → 0, b → −1}
L
(3.13)
22
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Finalmente, a função de aproximação ψ1 (x) é dada pela igualdade:
ψ1 (x) = −x +
2 x2
x3
− 2
L
L
(3.14)
Um raciocı́nio semelhante permite obter as restantes funções de aproximação. Tem-se:
ψ1 (x) = −x +
2 x2
x3
− 2
L
L
(3.15)
x2
x3
ψ2 (x) =
− 2
L
L
ψ3 (x) = −1 +
ψ4 (x) =
(3.16)
3 x2 2 x3
− 3
L2
L
(3.17)
−3 x2 2 x3
+ 3
L2
L
(3.18)
Problema 3.1: Deduza as funções de aproximação ψ2 (x), ψ3 (x) e ψ4 (x).
A definição (3.3) para o campo de deslocamentos transversais no elemento de viga
apenas permite determinar a solução exacta quando não estão aplicadas quaisquer
cargas de vão. No entanto, é importante desde já referir que no caso dos elementos
de viga é possı́vel redefinir a aproximação dada por forma a ser possı́vel recuperar a
solução exacta para o problema, mesmo considerando carregamentos de vão [6]. A
discussão deste assunto será retomada na secção 3.3.
A aproximação (3.3) pode ser apresentada matricialmente na forma:
w(x) = Ψq =
h
i
ψ1 (x) ψ2 (x) ψ3 (x) ψ4 (x)
q1
q2
q3
q4
(3.19)
Mais uma vez fica claro que para se conseguir a definição da aproximação em cada
elemento, é apenas necessário conhecer o valor dos deslocamentos nodais elementares,
qi . A matriz das funções de aproximação pode ser expressa no seguinte formato:
·
Ψ=
2 x2
x3
−x +
− 2
L
L
x3
3 x2 2 x3
x2
− 2 −1 + 2 − 3
L
L
L
L
−3 x2 2 x3
+ 3
L2
L
¸
(3.20)
A aproximação para o campo de curvaturas pode ser escrita matricialmente na forma:
·
χ(x) = Bq =
d2 ψ2 (x)
d2 ψ3 (x)
d2 ψ4 (x)
d2 ψ1 (x)
−
−
−
−
d x2
d x2
d x2
d x2
¸
q1
q2
q3
q4
(3.21)
3.1. FORMULAÇÃO DO ELEMENTO FINITO DE VIGA
23
Para o elemento de viga de Euler-Bernoulli, a matriz B tem uma linha (porque neste
tipo de elemento estrutural apenas se considera um campo de deformações) e quatro
colunas (porque existem quatro deslocamentos nodais elementares). Tendo em conta
as funções de aproximação determinadas anteriormente, é possı́vel verificar que:
·
B=
−4 6 x
+ 2
L
L
−2 6 x
+ 2
L
L
−6 12 x
+ 3
L2
L
6
12 x
− 3
2
L
L
¸
(3.22)
Cada uma das colunas da matriz B tem um significado fı́sico bem preciso. Assim,
a coluna j da matriz B contém o campo de curvaturas que surge na viga quando se
impõe qj = 1 e se garante que todos os restantes deslocamentos independentes são
nulos, qk = 0 com k 6= j (de novo, na ausência de quaisquer cargas de vão).
Em cada um dos elementos da malha de elementos finitos ter-se-á:
χ(x) = (
−4 6 x
−2 6 x
−6 12 x
6
12 x
+ 2 ) q1 + (
+ 2 ) q2 + ( 2 + 3 ) q3 + ( 2 − 3 ) q4
L
L
L
L
L
L
L
L
(3.23)
A aproximação para o campo de momentos flectores pode ser obtida através da consideração das relações de elasticidade. Tendo em conta que
M (x) = D B q
é possı́vel escrever:
·
M (x) = [EI]
d2 ψ1 (x)
d2 ψ2 (x)
d2 ψ3 (x)
d2 ψ4 (x)
−
−
−
−
d x2
d x2
d x2
d x2
¸
q1
q2
q3
q4
(3.24)
Na equação anterior, a matriz D é constituı́da pela rigidez à flexão do elemento de
viga. De uma forma mais geral , pode dizer-se que a matriz D contém as propriedades mecânicas do elemento finito que permitem caracterizar o comportamento elástico
linear do material estrutural e relacionar os campos de esforços com os campos de
deformações.
A aproximação para o campo de momentos flectores em cada um dos elementos da
malha de elementos finitos é dada pela igualdade:
M (x) = EI (
3.1.2
−4 6 x
−2 6 x
−6 12 x
6
12 x
+ 2 ) q1 + EI (
+ 2 ) q2 + EI ( 2 + 3 ) q3 + EI ( 2 − 3 ) q4
L
L
L
L
L
L
L
L
(3.25)
Definição da matriz de rigidez elementar
Na figura 3.5 encontram-se identificadas as forças nodais equivalentes associadas a cada
um dos deslocamentos nodais elementares.
24
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
A matriz de rigidez elementar permite relacionar os deslocamentos nodais elementares,
qi , com as correspondentes forças nodais, Fi , pelo que no elemento de viga de EulerBernoulli este operador tem quatro linhas e quatro colunas.
Figura 3.5: Deslocamentos e forças nodais elementares
A matriz de rigidez elementar depende das caracterı́sticas geométricas e mecânicas do
elemento finito considerado. O seu cálculo passa pela aplicação da equação geral [2, 5]:
k(e) =
Z L
0
Bt D B dx
(3.26)
Substituindo na equação (3.26) as matrizes B e D anteriormente definidas obtém-se:
Z L
k(e) =
0
−4 6 x
+ 2
L
L
−2 6 x
+ 2
L
L
−6 12 x
+ 3
L2
L
6
12 x
− 3
L2
L
h
i · −4
6x
EI
+ 2
L
L
−2 6 x
+ 2
L
L
−6 12 x
+ 3
L2
L
6
12 x
− 3
2
L
L
¸
dx
(3.27)
Efectuando as integrações definidas na equação (3.27) é possı́vel obter:
(e)
k = EI
4
L
2
L
6
L2
−6
L2
2
L
4
L
6
L2
−6
L2
6
L2
6
L2
12
L3
−12
L3
−6
L2
−6
L2
−12
L3
12
L3
(3.28)
3.1. FORMULAÇÃO DO ELEMENTO FINITO DE VIGA
25
Na coluna j da matriz k(e) encontram-se listadas as forças nodais equivalentes que
surgem quando se impõe qj = 1 e se garante que todos os restantes deslocamentos
nodais elementares são nulos, qk = 0 com k 6= j. A identificação do significado fı́sico de
cada uma das colunas da matriz de rigidez elementar pode ser encontrada na figura 3.6.
Figura 3.6: Significado fı́sico dos elementos da matriz de rigidez elementar
Problema 3.2 Determine o termo K11 da matriz de rigidez elementar para um elemento de viga para o qual a altura da secção rectangular transversal varia ao longo do
eixo da peça segundo a equação h(x) = ho + (h1 − h0 )x/L.
Problema 3.3 A matriz de rigidez elementar definida na equação (3.28) contém a
informação disponibilizada nas tabelas da solução complementar para barras biencastradas utilizadas na resolução de pórticos planos com recurso ao método dos deslocamentos. Determine agora a matriz de rigidez elementar quando se considera que no
elemento de viga existe uma libertação de momento flector na secção final. Esta matriz de rigidez deve permitir recuperar a informação existente nas tabelas da solução
complementar das vigas encastradas-apoiadas.
3.1.3
Vector das forças nodais elementares
Na formulação do elemento finito de viga é necessário substituir as cargas aplicadas no
vão de cada uma das barras por um conjunto de forças nodais equivalentes elementares.
Este conjunto de forças nodais deve ser estaticamente equivalente ao carregamento de
26
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
vão aplicado. Para assegurar esta equivalência estática, as forças nodais equivalentes
são determinadas de forma a garantir que realizam, qualquer que seja a deformada
considerada, o mesmo trabalho que as cargas distribuı́das que substituem. O significado
fı́sico dos elementos deste vector encontra-se representado na figura 3.7.
Esta equivalência estática conduz à seguinte definição genérica para o vector das forças
nodais equivalentes [2, 5]:
F=
Z L
0
Ψt p dx ,
(3.29)
onde no vector p se lista a carga de vão aplicada no domı́nio do elemento.
Figura 3.7: Significado fı́sico das forças nodais equivalentes elementares
Desenvolvendo a equação (3.29) é possı́vel escrever:
Z L
F=
0
Z
L
ψ2 (x)
[p(x)] dx =
0
ψ3 (x)
ψ4 (x)
ψ1 (x)
x3
2 x2
− 2
−x +
L
L
2
3
x
x
− 2
L
L
3 x2 2 x3
−1 + 2 − 3
L
L
−3 x2 2 x3
+ 3
L2
L
[p(x)] dx
(3.30)
Se se considerar uma carga trapezoidal expressa na forma,
p(x) = p1 + (p2 − p1 ) x/L
o vector das forças nodais equivalentes será dado por:
(e)
F =
L2
(3 p1 + 2 p2 )
−
60
L2
(2 p1 + 3 p2 )
60
L
−
(7 p1 + 3 p2 )
20
L
(3 p1 + 7 p2 )
−
20
(3.31)
3.2. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 1)
27
Se a carga aplicada for uniformemente distribuı́da, p(x) = p, o vector das forças nodais
equivalentes é dado por:
−L2 p
12
2
L p
12
(e)
(3.32)
F =
Lp
2
−L p
2
Problema 3.4 Obtenha o vector das forças nodais equivalentes para uma carga uniformemente distribuı́da parcelar, caracterizada por p(x) = p, quando 0 ≤ x ≤ L/2 e
p(x) = 0 quando L/2 < x ≤ L.
Problema 3.5 Obtenha o vector das forças nodais equivalentes quando se considera
a existência de uma variação linear de temperatura, θL , ao longo da secção transversal
da viga de Euler-Bernoulli.
Problema 3.6 Determine o vector das forças nodais equivalentes associado a uma
carga uniformemente distribuı́da aplicada numa viga de Euler-Bernoulli quando se
considera a existência uma libertação de momento flector (rótula) na secção final do
elemento de barra.
Problema 3.7 Determine o vector das forças nodais equivalentes elementares associado
a um momento uniformemente distribuı́do aplicado a uma viga de Euler-Bernoulli.
3.2
Análise de uma viga contı́nua (exemplo 1)
Considere-se a estrutura representada na figura 3.8. Pretende-se determinar uma
solução aproximada para esta estrutura utilizando o método dos elementos finitos.
Figura 3.8: Análise de uma viga contı́nua - exemplo 1
Este exemplo vai servir para recordar de forma detalhada quais os passos envolvidos
na resolução de uma estrutura com recurso ao Método dos Elementos Finitos.
28
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
As diferentes etapas são apresentadas com algum detalhe, sendo dedicada especial
atenção à discussão do significado fı́sico de cada uma das operações efectuadas.
3.2.1
Discretização da estrutura
Na figura 3.9 apresenta-se a discretização considerada na análise desta estrutura, a
qual envolve a utilização de uma malha com dois elementos finitos. Tendo em conta
que não existem cargas de vão em qualquer uma das barras da estrutura, pode desde
já afirmar-se que a solução exacta para o campo de deslocamentos transversais é do
terceiro grau. Uma vez que na definição da aproximação do campo de deslocamentos
em cada um dos elementos da malha se utilizam funções de aproximação polinomiais de
grau três, é possı́vel desde já antever que a solução obtida com recurso ao método dos
elementos finitos vai permitir neste caso recuperar a solução exacta para a estrutura.
Na figura 3.9 identificam-se também os referenciais locais em função dos quais se vai
definir a aproximação para o campo de deslocamentos transversais em cada um dos
elementos da malha. A menos que algo seja expressamente referido, todas as grandezas
e equações que vão surgir na resolução desta estrutura vão estar referidas a esses
referenciais locais.
Figura 3.9: Discretização da viga contı́nua - exemplo 1
3.2.2
Identificação dos deslocamentos independentes
Na figura 3.10 identificam-se os deslocamentos independentes a considerar na análise da
estrutura. Estes deslocamentos correspondem aos deslocamentos nodais que se torna
necessário restringir para que todos os nós da discretização passem a estar impossibilitados de se movimentarem.
Existindo dois deslocamentos independentes, é desde já possı́vel verificar que o sistema
de equações global corresponde a um sistema de duas equações a duas incógnitas.
3.2. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 1)
29
Figura 3.10: Identificação dos deslocamentos independentes
3.2.3
Definição da aproximação
Para a definição da aproximação para o campo de deslocamentos transversais em cada
elemento é necessário ter em conta a tabela de incidências, apresentada no quadro 3.1.
Elemento
q1
q2
q3
q4
1
−
d1
−
−
2
d1
−
−
d2
Tabela 3.1: Tabela de incidências
Tendo em conta o conteúdo da tabela de incidências e a aproximação genérica definida
na equação (3.3) é possı́vel escrever para cada um dos elementos da discretização:
w(x1 ) = ψ1 (x1 ) q1 + ψ2 (x1 ) q2 + ψ3 (x1 ) q3 + ψ4 (x1 ) q4
(3.33)
w(x1 ) = ψ2 (x1 ) d1
(3.34)
Ã
w(x1 ) =
x21 x31
−
4
16
!
d1
(3.35)
w(x2 ) = ψ1 (x2 ) q1 + ψ2 (x2 ) q2 + ψ3 (x2 ) q3 + ψ4 (x2 ) q4
(3.36)
w(x2 ) = ψ1 (x2 ) d1 + ψ4 (x2 ) d2
(3.37)
Ã
w(x2 ) =
−x2 +
x22
x3
− 2
4
!
Ã
!
x2
x3
d1 + −3 2 + 2 2 d2
4
8
(3.38)
30
3.2.4
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Definição das equações elementares
Tendo em conta a definição (3.28) e a dimensão de cada um dos elementos de viga
existente na discretização considerada, as matrizes de rigidez elementares são definidas
por:
1
1
2
(1)
K = EI
3
8
−3
8
1
2
1
3
8
−3
8
2
1
(2)
K = EI
3
2
−3
2
1
2
3
2
−3
2
3
8
3
8
3
16
−3
16
−3
8
−3
8
−3
16
3
16
3
2
3
2
3
2
−3
2
−3
2
−3
2
−3
2
3
2
(3.39)
(3.40)
Como não existem quaisquer cargas de vão aplicadas, o vector das forças nodais equivalente é nulo em qualquer um dos elementos. Tem-se então:
0
0
F(1) = F(2) =
0
(3.41)
0
3.2.5
Reunião das equações elementares
Para obter as equações de equilı́brio global é agora necessário identificar a contribuição
de cada um dos elementos da malha para a matriz de rigidez da estrutura e para o
vector das forças nodais equivalentes globais.
Para este cálculo utiliza-se a informação disponibilizada na tabela de incidências (3.1).
3.2. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 1)
31
Aplicando o processo de reunião habitual, é possı́vel estabelecer que:
(1)
(2)
k11 = k22 + k11
k21 =
(2)
k41
(2)
k12 = k14
k22 =
(2)
k44
(3.42)
A definição dos termos da matriz de rigidez global em função dos termos das matrizes
de rigidez elementares foi efectuada com base na manipulação da informação existente
em cada uma das linhas da tabela de incidências.
Para se identificar a contribuição de um determinado elemento para a matriz de rigidez da estrutura, é necessário varrer a linha correspondente da tabela de incidências
e identificar todos os deslocamentos independentes globais aı́ definidos. Pode dizer-se
que o elemento em causa vai contribuir para todos os termos da matriz de rigidez da
estrutura que tenham ı́ndices que correspondam a todas as combinações dos ı́ndices
listados na linha correspondente da tabela de incidências. Para se encontrar a contribuição desse elemento para cada uma das entradas da matriz de rigidez global assim
identificadas, basta ter em conta a relação definida entre a numeração para os deslocamentos independentes da estrutura e a numeração adoptada para os deslocamentos
nodais elementares.
Figura 3.11: Significado fı́sico da primeira coluna da matriz de rigidez da estrutura
O mesmo resultado seria obtido se se utilizasse um procedimento mais parecido com o
que é seguido na aplicação do método dos deslocamentos para a resolução de problemas
de pórticos. Este tipo de raciocı́nio é agora aplicado na identificação directa de cada
32
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
uma das colunas da matriz de rigidez da estrutura tendo em conta o seu significado
fı́sico.
A primeira coluna da matriz de rigidez da estrutura vai listar as forças globais F1 e F2
que surgem quando se impõe o deslocamento independente global d1 com valor unitário
e se garante que os restantes se anulam.
A deformada correspondente encontra-se representada na figura 3.11. Ao ser imposta
uma rotação unitária no nó B, todos os elementos que partilham esse nó vão deformarse. Obervando a figura 3.11, conclui-se que a deformada no elemento 1 corresponde à
(1)
(1)
que se obtém quando se impõe q2 = 1 e qj = 0, com j 6= 2. Já no caso do elemento
2, é possı́vel observar que a deformada que se desenvolve é a que está associada à
(2)
(2)
imposição de q1 = 1 e qj = 0, com j 6= 1. É importante verificar que se poderia
ter chegado à mesma conclusão sem sequer olhar para as deformadas representadas na
figura 3.11 . Bastaria ter em conta a informação transmitida pela tabela de incidências
3.1, a qual permite verificar que o deslocamento independente global d1 corresponde
ao deslocamento q2 do elemento 1 e ao deslocamento q1 do elemento 2.
Identificados os deslocamentos nodais elementares que estão a ser prescritos em cada
um dos elementos de viga quando de impõe o deslocamento independente d1 com valor
unitário, é possı́vel identificar as forças nodais equivalentes que se desenvolvem em cada
um desses mesmos elementos. Tendo em conta o significado fı́sico de cada uma das
colunas da matriz de rigidez elementar, é possı́vel concluir que no elemento 1 as forças
que surgem correspondem à segunda coluna da matriz de rigidez elementar, enquanto
que no elemento 2 as forças nodais equivalentes correspondem à primeira coluna da
matriz de rigidez elementar. Esta informação encontra-se representada na figura 3.11.
É agora possı́vel identificar os termos da primeira coluna da matriz de rigidez da
estrutura, calculando a resultante dos momentos alicados nas secções adjacentes ao nó
B e determinando a resultante das forças verticais aplicadas nas secções adjacentes ao
nó C. Recuperam-se as equações já anterioremente determinadas unicamente através
da manipulação da informação disponibilizada na tabela de incidências.
Para se determinar a segunda coluna da matriz de rigidez da estrutura pode ser desenvolvido um procedimento em tudo semelhante ao que acaba de ser exposto. Para
começar, é necessário traçar a deformada que surge na estrutura quando se impõe o
segundo dos deslocamentos independentes com valor unitário e se garante que os restantes são nulos. A deformada correspondente encontra-se representada na figura 3.12.
Como o nó onde se impõe o deslocamento pertence apenas ao segundo elemento de
viga, apenas vão surgir deformações e esforços nesse mesmo elemento finito. Daqui
ser possı́vel concluir que o elemento de viga 1 em nada contribui para os termos da
segunda coluna da matriz de rigidez da estrutura. A deformada que surge neste caso
(2)
(2)
no elemento 2 é a que corresponde à imposição de q4 = 1 e qj = 0, com j 6= 4. As
forças nodais equivalentes a considerar neste caso são as que se encontram listadas na
coluna 4 da matriz de rigidez elementar, tal como se encontra ilustrado na figura 3.12.
Tendo em conta a informação representada nesta figura, é agora possı́vel determinar os
3.2. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 1)
33
Figura 3.12: Significado fı́sico da segunda coluna da matriz de rigidez da estrutura
termos da segunda coluna da matriz de rigidez da estrutura e recuperar as definições
já apresentadas na equação (3.42).
Substituindo em (3.42) os termos das matrizes de rigidez elementares, é possı́vel obter:
4EI 4EI
+
4
2
3EI
k21 = −
2
k11 =
3EI
2
3EI
=
2
k12 = −
k22
(3.43)
Simplificando as equações anteriores, é possı́vel obter para a seguinte matriz de rigidez
da estrutura:
3
−3/2
K∗ = EI
(3.44)
−3/2 3/2
Existe ainda um outro procedimento que permite efectuar a determinação da matriz
de rigidez global através da reunião das contribuições elementares. Esta alternativa
é formalmente correcta, mas menos prática que a utilização directa da informação
disponibilizada nas tabelas de incidências. Desta forma, embora seja aqui apresentada
com o intuito de tornar mais completa esta discussão, esta via alternativa não vai ser
seguida nos restantes exemplos apresentados neste documento.
A identificação da contribuição de cada elemento para a matriz de rigidez da estrutura
pode passar pela definição de uma matriz de incidências elementar. Essa matriz de
incidências, aqui denotada por J(e) , relaciona os deslocamentos nodais elementares com
os deslocamentos independentes da estrutura. A matriz de incidências elementar vai
ter um número de linhas igual ao número de deslocamentos nodais elementares (quatro,
no caso dos elementos de viga de Euler-Bernoulli) e um número de colunas igual ao
34
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
número de deslocamentos independentes da estrutura (dois, no exemplo que está a ser
analisado).
Para cada elemento da malha, a matriz de incidências permite definir:
q(e) = J(e) d,
(3.45)
onde nos vectores q(e) e d se listam os deslocamentos nodais elementares e os deslocamentos independentes da estrutura, respectivamente.
No caso da estrutura em análise, as matrizes de incidência são definidas por:
0 0
1 0
J(1) =
0 0
1 0
0 0
J(2) =
0 0
,
(3.46)
0 1
0 0
Estas matrizes de incidência permitem estabelecer:
q1
(1)
q
2
q3
q4
0 0
#
1 0 "
d1
=
0 0 d2
q1
(2)
q
2
q3
,
q4
0 0
1 0
#
0 0 "
d1
=
0 0 d2
(3.47)
0 1
Não é agora difı́cil verificar que a informação contida nas matrizes de incidência é em
tudo idêntica à que é fornecida pela habitual tabela de incidências.
Uma vez definida a matriz de incidência elementar, a contribuição do elemento finito
em causa para a matriz de rigidez da estrutura é dada por:
³
K∗(e) = J(e)
´t
K(e) J(e)
(3.48)
Na equação (3.48), a matriz K(e)
∗ contém a contribuição do elemento e para a matriz
de rigidez da estrutura. Tendo em conta as dimensões da matriz de incidências J(e) , é
fácil verificar que K(e)
∗ é uma matriz quadrada com uma dimensão idêntica à da matriz
de rigidez global.
Calculada a contribuição de cada elemento através da aplicação da equação (3.48), é
possı́vel determinar a matriz de rigidez da estrutura através da seguinte equação:
K∗ =
nel
X
e=1
K∗(e) =
nel ³
´
X
(e) t
J
K(e) J(e)
(3.49)
e=1
Na equação anterior, nel corresponde ao número de elementos finitos existentes na
discretização adoptada.
3.2. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 1)
35
No problema em análise, a aplicação das equações anteriores permite obter:
0 0
t
1 0
K(1)
∗ =
0 0
0 0
1 0
t
0 0
K(2)
∗ =
0 0
0 1
(1)
k11
(1)
k21
(1)
k31
(1)
(2)
k11
(2)
k21
(2)
k31
(2)
k41
k13
k22
(1)
(1)
k32
(1)
k41
(1)
k12
k42
(1)
k14
k23
(1)
k24
(1)
k33
(1)
k34
(1)
k43
(2)
k13
k22
(2)
(2)
k32
k12
(2)
(2)
k23
(2)
k24
(2)
k33
(2)
k34
(2)
(2)
0
(3.50)
0
0 0
(1)
k44
k14
k43
0 0
(1)
k22
1 0
=
0 0
0
(1)
(2)
(2)
k42
(1)
1 0
(2)
k
0 0
11
=
0 0
(2)
k41
(2)
k14
(2)
(3.51)
k44
0 1
k44
A matriz de rigidez da estrutura é dada então por:
K∗ =
(1)
k22
0
0
0
+
(2)
k11
(2)
k41
(2)
k14
(2)
=
(1)
(2)
k22 + k11
(2)
k44
k41
(2)
k14
(2)
(3.52)
k44
Para se concluir a determinação do sistema de equilı́brio global, é agora necessário
determinar o vector das forças nodais equivalentes. Este vector tem em conta as forças
nodais directamente aplicadas à estrutura e a contribuição dos vectores de forças nodais
equivalentes associados a cada elemento da malha.
Tal como no caso da matriz de rigidez da estrutura, a identificação da contribuição
de cada elemento finito para o vector de forças nodais equivalentes global pode ser
efectuado com recurso directo à informação contida na tabela de incidências, ou através
da consideração das matrizes de incidência elementares anteriormente definidas. É
também possı́vel obter a mesma informação através da utilização de um raciocı́nio
semelhante ao que é aplicado no tratamento da solução particular do método dos
deslocamentos quando aplicado à resolução de problemas de pórticos planos.
Se se utilizar a tabela de incidências, cada elemento finito vai contribuir para as forças
nodais globais cujos ı́ndices estejam listados na linha correspondente. Para encontrar
a contribuição correspondente, é necessário ter em conta a relação existente entre a
numeração elementar e a numeração global para os graus de liberdade (deslocamentos
independentes) considerados na análise.
A aplicação deste procedimento permite escrever para o problema em estudo:
(1)
(2)
F1 = F1nodal + F2 + F1
(2)
F2 = F2nodal + F4
(3.53)
36
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
onde Fjnodal corresponde à carga nodal aplicada segundo a direcção do deslocamento
independente j.
No exemplo em estudo, e tendo em atenção que não existe qualquer carregamento de
vão, é possı́vel verificar que:
"
F1
F2
#
F1nodal
=
F2nodal
10
=
(3.54)
−5
O cálculo da contribuição de cada elemento finito pode ser efectuado também com
base na consideração das matrizes de incidência. A contribuição do elemento e pode
ser estabelecida a partir de:
³
´t
F(∗ e) = J(e) F(e)
(3.55)
Tendo em conta as dimensões da matriz de incidências elementar, J(e) , é possı́vel verificar que o vector F(∗ e) tem um número de coeficientes igual ao número de deslocamentos
independentes da estrutura, ou seja, tem uma dimensão igual ao do vector das forças
nodais equivalentes globais. Somando a contribuição de cada elemento, obtém-se:
F=
nel
X
F(e)
∗
(nodal)
+F
=
e=1
nel ³
´
X
(e) t
J
F(e) + F(nodal)
(3.56)
e=1
Aplicando a equação (3.55) a cada um dos elementos da malha em estudo vem:
t
(1)
F1
0 0
(1)
(1)
1 0
F
F
2
2
F(1)
=
∗ =
(1)
0 0 F
0
3
0 0
(3.57)
(1)
F4
t
(2)
F1
1 0
(2)
(2)
0 0
F
F
2
1
F(2)
=
=
∗
(2)
(2)
0 0
F4
F3
0 1
(3.58)
(2)
F4
Tendo em conta a equação (3.56), obtém-se finalmente:
"
F1
F2
#
(1)
(nodal)
= F(1)
=
∗ + F∗ + F
(1)
F2
0
+
(2)
F1
(2)
F4
+
(nodal)
F1
(nodal)
F2
=
10
(3.59)
−5
Problema 3.8 Com base no raciocı́nio habitualmente utilizado no tratamento da
solução particular associada à aplicação do método dos deslocamentos na resolução de
pórticos planos, recupere a expressão para o vector das forças nodais globais.
3.2. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 1)
3.2.6
37
Resolução das equações de equilı́brio globais
A equação do método dos elementos finitos (equação de equilı́brio de forças nodais) é
escrita no formato geral:
K∗ d = F
(3.60)
Tendo em conta os operadores calculados na secção anterior, é possı́vel escrever neste
caso:
"
#
10
3
−3/2
d1 =
EI
(3.61)
d2
−3/2 3/2
−5
A resolução deste sistema de equações conduz à determinação dos valores para os
deslocamentos independentes. Obtém-se:
"
3.2.7
d1
d2
#
1
=
EI
"
10/3
0
#
(3.62)
Definição da solução aproximada
Substituindo os valores dos deslocamentos independentes nas aproximações definidas
na secção 3.2.3 obtém-se a solução aproximada para o campo de deslocamentos em
cada um dos elementos de barra. Tem-se desta forma:
w(x1 ) =
−5
(x1 − 4) x21
24EI
(3.63)
w(x2 ) =
−5
(x2 − 2)2 x2
6EI
(3.64)
A aproximação para o campo de deslocamentos transversais em cada elemento finito é
expresso nos respectivos referenciais locais, xi , os quais têm como origem o nó inicial
do elemento. Também seria possı́vel escrever estas aproximações no referencial gobal
da estrutura. Assumindo que este referencial coincide com o eixo das barras e tem
como origem o nó A, é possı́vel estabelecer as seguintes relações entre os referenciais
locais e o referencial global:
x1 = xg
;
x2 = xg − 4
(3.65)
A substituição destas igualdades nas expressões acima apresentadas para os campos
de deslocamentos transversais permite exprimir esses campos em função do referencial
global da estrutura.
Na figura 3.13 apresenta-se o traçado da deformada obtida através da análise por
elementos finitos.
38
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Figura 3.13: Deformada obtida para a viga continua [m]
A determinação dos campos de curvaturas em cada elemento finito passa pela utilização
das condições de compatibilidade no domı́nio. Aplicando a equação (2.39) é possı́vel
determinar:
µ
1
5 5 x1
χ(x1 ) =
− +
EI
3
4
µ
¶
1
20
χ(x2 ) =
− + 5 x2
EI
3
(3.66)
¶
(3.67)
O cálculo do campo de momentos flectores passa pela aplicação da relação de elasticidade (2.40). Otém-se:
5 5 x1
M (x1 ) = − +
3
4
M (x2 ) = −
20
+ 5 x2
3
(3.68)
(3.69)
Na figura 3.14 apresenta-se o traçado do diagrama de momentos flectores obtido através
da análise por elementos finitos.
Figura 3.14: Diagrama de momentos flectores na viga continua [kN m]
A equação de equilı́brio (2.30) permite agora determinar o valor dos esforços transversos
em cada um dos elementos de viga. Variando linearmente os campos de momentos no
domı́nio de cada elemento, o esforço transverso assume um valor constante em cada
uma das barras da discretização. É possı́vel obter:
5
4
(3.70)
V (x2 ) = 5
(3.71)
V (x1 ) =
3.2. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 1)
39
Na figura 3.15 apresenta-se o traçado do diagrama de esforços transversos.
Figura 3.15: Diagrama de esforços transversos na viga continua [kN ]
Problema 3.9 Escreva as equações para os campos de deslocamentos, campos de
deformação e campos de esforços no referencial global da estrutura.
Problema 3.10 Com base nos resultados obtidos, determine o valor das reacções de
apoio na viga contı́nua em análise.
3.2.8
Verificação das condições de equilı́brio
Será que a solução aproximada obtida corresponde à solução exacta? Para que o possa
ser, e tendo em conta que todas as condições de compatibilidade são satisfeitas a priori
quando se definem as aproximações para os campos de deslocamentos, é necessário
que os campos de esforços satisfaçam localmente todas as condições de equilı́brio. São
três os conjuntos de condições de equilı́brio a verificar: as condições de equilı́brio no
domı́nio, as condições de equilı́brio na fronteria estática e as condições de equilı́brio
nas fronteiras entre elementos finitos adjacentes.
Verificação das condições de equilı́brio no domı́nio
Para que as condições de equilı́brio no domı́nio sejam satisfeitas, é necessário que o
campo de momentos flectores e a carga aplicada no domı́nio do elemento satisfaçam a
condição expressa na condição (2.45).
Tendo em conta que não existe qualquer carga de vão aplicada no elemento finito 1 é
possı́vel verificar que:
d2 M (x1 )
+ p(x1 ) = 0 + 0 = 0
(3.72)
dx21
No elemento finito 2 tem-se também que:
d2 M (x2 )
+ p(x2 ) = 0 + 0 = 0
dx22
(3.73)
As equações anteriores permitem verificar as condições de equilı́brio no domı́nio. Tendo
em conta que os diagramas de momentos flectores variam linearmente, as respectivas
segundas derivadas são nulas. Para haver equilı́brio é então necessário que sejam nulas as cargas distribuı́das em cada um dos domı́nios, o que corresponde de facto ao
carregamento que está a ser considerado.
40
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Verificação das condições de fronteira estática
Para se verificarem as condições de fronteira estática é necessário primeiro identificar
quais os nós pertencentes à fronteira exterior da estrutura onde o valor dos deslocamentos não está prescrito. É possı́vel concluir que na estrutura em análise as condições
de fronteira estática (ou condições de equilı́brio na fronteira) correspondem a verificar
que o esforço transverso na secção adjacente ao nó C deve ser igual à carga transversal
concentrada aı́ aplicada. Essa condição corresponde a impor:
V (x2 = 2) = 5kN
(3.74)
É imediato verificar que esta condição está satisfeita se se tiver em consideração o valor
para o esforço transverso calculado no elemento de viga 2. Na figura 3.16 está traçado
o diagrama de corpo livre do nó C. Analisando a informação contida nesse diagrama,
é fácil verificar a condição de equilı́brio na direcção transversal.
Figura 3.16: Diagrama de corpo livre do nó C
Verificação das condições de equilı́brio na fronteira entre elementos
No problema em análise, a fronteira entre os elementos finitos 1 e 2 corresponde ao nó B.
A verificação das condições de equilı́brio na fronteira entre esses elementos corresponde
neste caso à verificação das condições de equilı́brio nesse mesmo nó B. Na figura 3.17
representa-se o diagrama de corpo livre do nó B. A condição de equilı́brio a verificar
corresponde neste caso ao equilı́brio global de momentos aplicados ao nó em causa. O
equilı́brio de forças na direcção transversal resulta sempre satisfeito devido à existência
de uma reacção vertical nesse nó B.
Figura 3.17: Diagrama de corpo livre do nó B
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
41
Analisando os momentos aplicados no nó B (há um momento directamente aplicado
nesse nó e um par de momentos que traduz a acção de cada uma das barras sobre o
nó em estudo), facilmente se verifica que a resultante é nula. Está assim assegurada a
verificação das condições de fronteira entre elementos.
Como estão satisfeitas todas as condições de equilı́brio, pode afirmar-se que a solução
obtida corresponde à solução exacta para o problema. Conforme referido inicialmente,
este era já um resultado esperado tendo em conta que o grau das aproximações efectuadas para os campos de deslocamentos transversais em cada elemento é igual ao grau
da solução exacta.
Problema 3.11 Determine a solução aproximada obtida para a estrutura representada na figura 3.8 quando se considera como carregamento aplicado um assentamento
vertical de apoio no nó A, com valor dado por δy = −∆. Considere nesta análise a
malha de elementos finitos representada na figura 3.9. Discuta se a solução obtida
corresponde ou não à solução exacta.
Problema 3.12 Determine a solução aproximada para a estrutura representada na
figura 3.8 quando se considera como carregamento uma variação linear de temperatura
de θL = 5. Utilize de novo a malha representada na figura 3.9 e discuta se a solução
obtida é exacta.
3.3
Análise de uma viga simplesmente apoiada
Ilustra-se agora a aplicação do método dos elementos finitos na análise de uma viga
simplesmente apoiada sujeita à acção de uma carga uniformemente distribuı́da. Com
este carregamento, o grau das funções de aproximação é inferior ao grau da solução
exacta, pelo que será de esperar apenas a obtenção de uma solução aproximada.
Figura 3.18: Viga simplesmente apoiada com carga uniformemente distribuı́da
42
3.3.1
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Discretização com 1 elemento finito
Discretização da estrutura
Para a análise da viga simplesmente apoiada considera-se a discretização apresentada
na figura 3.19, na qual se define apenas um elemento finito.
Figura 3.19: Discretização da viga (malha com 1 elemento)
Identificação dos deslocamentos independentes
Os deslocamentos independentes a considerar quando se utiliza a malha constituı́da
apenas por um elemento finito encontram-se representados na figura 3.20. Esses deslcamentos correspondem às rotações nos nós de extremidade da estrutura em análise.
Figura 3.20: Deslocamentos independentes (malha com 1 elemento)
Definição da aproximação
Antes de definir a aproximação para o campo de deslocamentos transversais ao longo
do elemento 1, é importante construir a tabela de incidências.
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
Elemento
q1
q2
q3
q4
1
d1
d2
−
−
43
Tabela 3.2: Tabela de incidências para a viga simplesmente apoiada (1 elemento)
Tendo em conta a informação contida na tabela 3.2 e a definição geral para a aproximação do campo de deslocamentos transversais num elemento de viga de EulerBernoulli (ver equação (3.3)) é possı́vel escrever:
w(x1 ) = ψ1 (x1 ) q1 + ψ2 (x1 ) q2 + ψ3 (x1 ) q3 + ψ4 (x1 ) q4
(3.75)
w(x1 ) = ψ1 (x1 ) d1 + ψ2 (x1 ) d2
(3.76)
Ã
w(x1 ) =
2 x2 x3
−x +
− 2
4
4
!
Ã
x21 x31
− 2
d1 +
4
4
!
d2
(3.77)
Equações elementares
De acordo com (3.28), a matriz de rigidez elementar para a viga 1 é dada por:
(1)
k = EI
4
4
2
4
6
42
−6
42
2
4
4
4
6
42
−6
42
6
42
6
42
12
43
−12
43
−6
42
−6
42
−12
43
12
43
(3.78)
Como existe uma carga de vão uniformemente distribuı́da, a aplicação da definição
(3.32) permite determinar o vector das forças nodais equivalentes elementares. Obtémse:
−42
12
42
12
(1)
F =
(3.79)
4
2
−4
2
44
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Reunião das equações elementares
Tendo em conta a informação contida na tabela de incidências 3.2, é possı́vel determinar
a contribuição do elemento 1 para a matriz de rigidez da estrutura. Obtém-se:
(1)
(1)
k11 = k11
k21 =
k12 = k12
(1)
k21
k22 =
(3.80)
(1)
k22
Tendo em conta a matriz de rigidez elementar atrás apresentada, pode escrever-se:
K∗ = EI
1.0000 0.5000
(3.81)
0.5000 1.0000
A informação contida na tabela de incidências 3.2 vai permitir identificar as expressões
que conduzem à obtenção dos termos do vector das forças nodais equivalentes globais.
É possı́vel verificar que:
(1)
(3.82)
(1)
(3.83)
(nodal)
+ F1
(nodal)
+ F2
F1 = F1
F2 = F2
Substituindo valores, obtém-se:
F=
−4/3
(3.84)
4/3
Resolução da equação do MEF
A resolução da equação de equilı́brio global,
EI
1.0000 0.5000
0.5000 1.0000
d1
d2
=
−4/3
4/3
(3.85)
permite determinar os seguintes valores para os deslocamentos independentes:
1 −8/3
d=
EI
8/3
(3.86)
Análise da solução obtida
Substituindo os valores dos deslocamentos independentes d1 e d2 na aproximação definida para o campo de deslocamentos transversais (3.77), obtém-se:
w(x1 ) =
−2
(x1 − 4) x1
3EI
(3.87)
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
45
0
0.5
1
1.5
Solução aproximada
2
2.5
3
Solução exacta
3.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 3.21: Campo de deslocamentos transversais [m] (1 elemento)
O campo de deslocamentos obtido encontra-se representado na figura 3.21, onde também
se traça o andamento exacto para o campo de deslocamentos transversais. Verifica-se
com facilidade que a solução obtida para o campo de deslocamentos não é a exacta.
Como referido inicialmente, este é um resultado esperado, porque o grau da solução
exacta (quarto grau neste caso) é superior ao grau das funções de aproximação utilizadas na modelação por elementos finitos.
É possı́vel verificar no entanto que os valores dos deslocamentos nodais globais correspondem aos valores exactos. Esta coincidência surge apenas quando o modelo de
elementos finitos consegue, para o tipo de elemento estrutural em análise, determinar
a solução exacta para o problema quando se consideram carregamentos constituı́dos
apenas por cargas aplicadas nos nós.
A aplicação das condições de compatibilidade no domı́nio permite obter a aproximação
para o campo de curvaturas ao longo da barra.
χ(x1 ) =
4
3EI
(3.88)
A utilização das relações de elasticidade permite a determinação da solução aproximada
para o campo de momentos flectores.
M (x1 ) =
4
3
(3.89)
O cálculo da aproximação para o campo de esforços transversos passa pela utilização
da condições de equilı́brio que permite relacionar este campo com a derivada do campo
de momentos flectores ao longo do eixo da peça. Obtém-se:
V (x1 ) = 0
(3.90)
Os diagramas de momentos flectores e de esforços transversos encontram-se apresentados nas figuras 3.22 e 3.23, respectivamente. Os diagramas que resultam do cálculo
46
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
0
0.2
0.4
Solução exacta
0.6
0.8
1
Solução aproximada
1.2
1.4
1.6
1.8
2
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 3.22: Diagrama de momentos flectores [kN m]
aproximado efectuado são comparados com os diagramas exactos. Mais uma vez é claro
que a solução obtida não é a exacta. É também possı́vel verificar que a consideração
de apenas um elemento finito conduz a uma aproximação grosseira, a qual se encontra
ainda longe de recuperar a solução exacta para o problema.
2
1.5
Solução exacta
1
0.5
0
−0.5
−1
Solução aproximada
−1.5
−2
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 3.23: Diagrama de esforços transversos [kN ]
Verificação das condições de equilı́brio
A comparação dos diagramas de esforços e do campo de deslocamentos obtidos com
o MEF com os correspondentes valores exactos, permite verificar de imediato que a
solução obtida é apenas aproximada.
No entanto, como se poderia chegar a essa mesma conclusão mesmo sem serem conhecidos os valores exactos para esses campos? Mais uma vez é necessário verificar as
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
47
condições de equilı́brio no domı́nio e na fronteira estática (neste caso não faz sentido
falar em fronteiras entre elementos porque se considera apenas um elemento na malha).
Se todas as condições de equilı́brio estiverem satisfeitas, pode dizer-se que a solução
é exacta. Basta existir uma condição de equilı́brio que não é verificada para se poder
afirmar que a solução construı́da é apenas aproximada.
A condição de equilı́brio no domı́nio é dada pela equação (2.45). Efectuando a verificação correspondente verifica-se que:
d2 M (x1 )
+ p(x1 ) = 0 + 1.0 6= 0 ,
dx21
(3.91)
pelo que se pode concluir que não é verificado o equilı́brio no domı́nio do elemento finito.
Tal bastaria para afirmar que a solução obtida é apenas aproximada. No entanto, e
para ilustrar o tratamento das condições de equilı́brio na fronteira estática, efectua-se
a verificação correspondente.
Dado que nos nós de extremidade da viga simplesmente apoiada existem apoios fixos
que impedem apenas o deslocamento transversal, e tendo em conta que não existe qualquer momento concentrado aplicado nesses nós, as condições de equilı́brio na fronteira
da estrutura podem ser expressas na seguinte forma:
M (x1 = 0) = 0kN m ;
M (x1 = 4) = 0kN m
(3.92)
Ora na solução aproximada obtida tem-se:
M (x1 = 0) = M (x1 = 4) = 4/3 6= 0 ,
(3.93)
o que permite desde logo verificar que nenhuma das condições de equilı́brio na fronteira
é verificada.
Recuperação da solução exacta
O método dos deslocamentos pode ser encarado como correspondendo à aplicação do
Método dos Elementos Finitos na análise de estruturas constituı́das por peças lineares. Desta forma, pode ser surpreendente o facto do MEF só conseguir determinar
a solução exacta quando o carregamento aplicado é constituı́do exclusivamente por
cargas aplicadas nos nós da discretização.
O que existe de diferente no caso do método dos deslocamentos que permite a obtenção
da solução exacta para o problema, independentemente do carregamento aplicado?
Para responder a esta pergunta, veja-se que na definição da solução para o campo de
deslocamentos transversais em cada um dos elementos finitos se escreve:
w(xi ) = ψ1 (xi ) q1 + ψ2 (xi ) q2 + ψ3 (xi ) q3 + ψ4 (xi ) q4
(3.94)
48
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
ou, para o caso da estrutura em estudo discretizada apenas com um elemento finito:
w(x1 ) = ψ1 (x1 ) d1 + ψ2 (x1 ) d2
(3.95)
A aproximação para o campo de deslocamentos é construı́da através da definição de
um somatório de parcelas, onde em cada uma delas se multiplica uma dada função
de aproximação pelo valor do deslocamento nodal elementar correspondente. Ora em
terminologia do método dos deslocamentos, este somatório corresponde à definição da
solução complementar para o campo de deslocamentos.
Quando se aplica o método dos deslocamentos, para além da parcela referente à solução
complementar (a que corresponde directamente à aproximação que é efectuada na formulação por elementos finitos), é necessário adicionar uma parcela associada à chamada
solução particular.
Essa parcela particular contém a equação para o campo de deslocamentos que surge
quando na viga se bloqueiam os deslocamentos nodais elementares e se aplicam todas
as cargas de vão. A solução particular para o campo de deslocamentos, w0 (xi ), corresponde fisicamente ao campo de deslocamentos que surge numa viga de Euler-Bernoulli
encastrada nas duas extremidades e sujeita à acção do conjunto de cargas de vão que
estiverem a ser consideradas. A aproximação completa fica definida então por:
w(xi ) = ψ1 (xi ) q1 + ψ2 (xi ) q2 + ψ3 (xi ) q3 + ψ4 (xi ) q4 + w0 (xi )
(3.96)
Tendo em conta que numa viga bi-encastrada sujeita a uma carga uniformemente distribuı́da p, o campo de deslocamentos é dado por:
p
w0 (xi ) =
(L − xi )2 x2i
(3.97)
24EI
é possı́vel escrever para o elemento 1 a seguinte expressão para o campo de deslocamentos transversais:
p
w(x1 ) = ψ1 (x1 ) d1 + ψ2 (x1 ) d2 +
(L − xi )2 x2i
(3.98)
24EI
Tendo incluı́do na aproximação a solução particular, é possı́vel verificar que a expressão
resultante permite recuperar a solução exacta para o campo de deslocamentos transversais. Substituindo na igualdade anterior o valor dos deslocamentos independentes
d1 e d2 e tendo em conta a definição das funções de aproximação, é possı́vel obter:
w(x1 ) =
1
x1 (64 − 8x21 + x3 )
24EI
(3.99)
A consideração das condições de compatibilidade e equilı́brio permite recuperar a seguinte equação para o campo de momentos flectores:
1
M (x1 ) = x1 (4 − x1 )
2
(3.100)
O campo de esforços transversos é definido por:
V (x1 ) = 2 − x1
(3.101)
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
49
Conclui-se com facilidade que os campos de momentos flectores e esforços transversos obtidos a partir da solução exacta para o campo de deslocamentos transversais
corespondem aos campos de esforços exactos para o carregamento aplicado.
Verifica-se desta forma que no caso das vigas de Euler-Bernoulli é possı́vel recuperar a solução exacta para um problema com cargas de vão. Esse cálculo obriga à
consideração de um termo adicional na definição da aproximação do campo de deslocamentos. Esse termo adicional, aqui designado por solução particular. corresponde
ao campo de deslocamentos que se desenvolve no elemento finito quando se impedem
todos os deslocamentos nodais elementares e quando se aplica o carregamento de vão.
Porque não incluir então sempre esta parcela nos modelos de elementos finitos? Acontece que a definição desta solução particular apenas é possı́vel para elementos estruturais simples, para os quais a utilização de técnicas de cálculo analı́ticas permitem regra
geral obter a solução pretendida sem haver a necessidade de se utilizar uma técnica de
cálculo numérico aproximado.
Para elementos estruturais com comportamento mais complexo, a definição de tal termo
correctivo deixa de ser possı́vel, razão pela qual a definição da aproximação dos campos
de deslocamentos nas formulações clássicas de elementos finitos é sempre efectuada da
forma que tem vindo a ser apresentada.
A possibilidade que existe no caso da análise de vigas de Euler-Bernoulli para efecuar a recuperação do campo de deslocamentos exacto quando se consideram análise
em regimes fisica e geometricamente lineares permite ainda entender de forma mais
simples a razão pela qual nestes casos se consegue obter o valor exacto para os deslocamentos nodais independentes. Recorde-se que a solução exacta é recuperada somando
a aproximação definida à elementos finitos com a solução particular. Recorde-se que
esta corresponde ao campo de deslocamentos numa viga bi-encastrada sujeita às cargas
de vão consideradas. Ora nas extremidades da barra, a solução particular é sempre
igual a zero (os nós, estando encastrados, não têm nem deslocamentos transversais
nem rotações). Ora como a solução exacta é recuperada somando as duas parcelas
e como a parcela particular é nula nos nós de extremidade do elemento, conclui-se
que a solução obtida nos nós apenas com a aproximação definida pela modelação com
elementos finitos é já a exacta.
3.3.2
Discretização com 2 elementos finitos
Considere-se de novo a viga simplemente apoiada representada na figura 3.18. Determinase agora uma nova solução aproximada considerando uma malha com dois elementos
finitos de igual dimensão.
50
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Discretização da estrutura
Para a análise da viga simplesmente apoiada considere-se a discretização considerada
na figura 3.24, a qual considera a utilização de dois elementos finitos.
Figura 3.24: Discretização da viga (malha com 2 elementos)
Identificação dos deslocamentos independentes
Os deslocamentos independentes a considerar encontram-se representados na figura
3.25.
Figura 3.25: Deslocamentos independentes (malha com 2 elementos)
Definição da aproximação
Tendo em conta a informação contida na tabela de incidências 3.3 e a definição geral
para a aproximação do campo de deslocamentos transversais num elemento de viga de
Euler-Bernoulli (ver equação (3.3)) é possı́vel escrever para cada um dos elementos da
malha
w(x1 ) = ψ1 (x1 ) q1 + ψ2 (x1 ) q2 + ψ3 (x1 ) q3 + ψ4 (x1 ) q4
(3.102)
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
Elemento
q1
q2
q3
q4
1
d1
d2
−
d3
2
d2
d4
d3
−
51
Tabela 3.3: Tabela de incidências para a viga simplesmente apoiada (2 elementos)
w(x1 ) = ψ1 (x1 ) d1 + ψ2 (x1 ) d2 + ψ4 (x1 ) d3
w(x1 ) = (−x1 +
(3.103)
2 x21 x31
x2 x 3
−3 x2 2 x3
− 2 )d1 + ( 1 − 21 )d2 + ( 2 1 + 31 )d3
2
2
2
2
2
2
(3.104)
w(x2 ) = ψ1 (x2 ) q1 + ψ2 (x2 ) q2 + ψ3 (x2 ) q3 + ψ4 (x2 ) q4
(3.105)
w(x2 ) = ψ1 (x2 ) d2 + ψ2 (x2 ) d4 + ψ3 (x2 ) d3
(3.106)
w(x2 ) = (−x2 +
x2 x3
3 x2 2 x3
2 x22 x32
− 2 )d2 + ( 2 − 22 )d4 + (−1 + 22 − 32 )d3 (3.107)
2
2
2
2
2
2
Equações elementares
Tendo em conta que as propriedades geométricas e mecânicas das duas barras são
semelhantes, as respectivas matrizes de rigidez elementares são iguais. De acordo com
(3.28), é possı́vel verificar que:
(1)
(2)
k = k = EI
4
2
2
2
6
22
−6
22
2
2
4
2
6
22
−6
22
6
22
6
22
12
23
−12
23
−6
22
−6
22
−12
23
12
23
(3.108)
Existindo carga de vão uniformemente distribuı́das em cada um dos elementos de viga, a
aplicação da definição (3.32) permite determinar o vector das forças nodais equivalentes
52
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
elementares. Obtém-se:
F(1) = F(2)
−22
12
22
12
−2
2
−2
2
(3.109)
Reunião das equações elementares
Tendo em conta a informação contida na tabela de incidências 3.3, é possı́vel determinar
a contribuição de cada elemento para a matriz de rigidez da estrutura. Obtém-se:
(1)
k12 = k12
(1)
k22 = k22 + k11
(1)
(2)
k23 = k24 + k13
(1)
(2)
(1)
k42
(2)
k31
(1)
k44
(2)
k33
k11 = k11
k21 = k21
k31 =
(1)
k41
k41 = 0
(1)
k32 =
+
(1)
k13 = k14
(2)
k33 =
+
k14 = 0
(2)
k42 = k21
(2)
k24 = k12
k34 =
(2)
k32
(3.110)
(2)
k43 = k23
k44 = k22
Tendo em conta as matrizes de rigidez elementares atrás apresentadas, pode escrever-se:
2.0000
1.0000 −1.5000
1.0000 4.0000
K∗ = EI
−1.5000
0
0
1.0000
0
1.0000
0
3.0000
1.5000
1.5000
2.0000
(3.111)
A informação contida na tabela de incidências 3.3 vai permitir identificar as expressões
que conduzem à obtenção dos termos do vector das forças nodais equivalentes globais.
É possı́vel verificar que:
(nodal)
+ F1
(nodal)
+ F2 + F1
(nodal)
+ F4 + F3
(nodal)
+ F2
F1 = F1
F2 = F2
F3 = F3
F4 = F4
(1)
(3.112)
(1)
(2)
(3.113)
(1)
(2)
(3.114)
(2)
(3.115)
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
53
Substituindo valores, obtém-se:
−1/3
0
F=
−2.0
(3.116)
1/3
Resolução da equação do MEF
A resolução da equação de equilı́brio global,
2.0000
1.0000 −1.5000
1.0000 4.0000
EI
−1.5000
0
0
1.0000
0
3.0000
1.5000
0
d1
−1/3
1.0000
0
d2
=
d3
−2.0
1.5000
2.0000
d4
1/3
(3.117)
permite determinar os seguintes valores para os deslocamentos independentes:
−8/3
0.0000
1
d=
−10/3
EI
(3.118)
8/3
Análise da solução obtida
Substituindo os valores dos deslocamentos independentes nas aproximações definidas
para o campo de deslocamentos transversais em cada um dos elementos da malha
obtém-se:
´
³
1
(3.119)
w(x1 ) = −
x1 −16 + x1 + x21
6EI
w(x2 ) =
1
(20 − 7 x22 + x32 )
6EI
(3.120)
O campo de deslocamentos transversais aproximado que se obtém encontra-se representado na figura 3.26. É possı́vel verificar que a solução aproximada obtida para os
deslocamentos é neste caso muito próxima da solução exacta para o problema.
A aplicação das equações de compatibilidade no domı́nio permite determinar a aproximação para o campo de curvaturas em cada um dos elementos finitos. Tem-se:
χ(x1 ) =
1
(1/3 + x1 )
EI
(3.121)
54
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
0
0.5
1
1.5
Solução aproximada
2
2.5
3
Solução exacta
3.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 3.26: Campo de deslocamentos transversais [m]
χ(x2 ) =
1
(7/3 − x2 )
EI
(3.122)
0
0.5
Solução aproximada
1
1.5
2
2.5
Solução exacta
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 3.27: Diagrama de momentos flectores [kN m]
A aproximação para os campos de momentos flectores é definida com base na consideração das relações de elasticidade. É possı́vel escrever:
M (x1 ) = 1/3 + x1
(3.123)
M (x2 ) = 7/3 − x2
(3.124)
A aproximação para os campos de esforços transversos é agora dada pelas igualdades:
V (x1 ) = 1
(3.125)
V (x2 ) = −1
(3.126)
3.3. ANÁLISE DE UMA VIGA SIMPLESMENTE APOIADA
55
Os diagramas de esforços obtidos com a malha com dois elementos finitos encontram-se
representados nas figuras 3.27 e 3.28. Nessas figuras estão também representados os
diagramas de esforços exactos. Embora as aproximações conseguidas sejam melhores
que as que tinham sido obtidas com a malha com apenas um elemento finito, é visı́vel
que as soluções aproximadas para os esforços ainda se encontram bastante afastadas
das respectivas soluções exactas.
2
1.5
1
Solução exacta
0.5
0
−0.5
−1
Solução aproximada
−1.5
−2
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 3.28: Diagrama de momentos flectores [kN ]
É importante verificar também que a convergência para a solução exacta é mais rápida
no caso das grandezas que são directamente aproximadas, os campos de deslocamentos
transversais. A malha com dois elementos finitos permite obter uma solução que se
aproxima bastante da solução exacta. Já a mesma malha conduz à obtenção de aproximações para os campos de esforços que ainda diferem significativamente da solução
exacta, em especial se se considerar o caso do diagrama de esforço transverso.
Pode dizer-se de forma simplista que a qualidade que é obtida na aproximação de uma
determinada grandeza fı́sica vai-se degradando à medida que se calculam derivadas para
passar do conhecimento de uma grandeza para outra que se pretenda determinar. Quer
isto dizer que a precisão conseguida para a aproximação do campo de deslocamentos
transversais é maior do que a precisão obtida para o campo de momentos flectores
(recorde-se que para passar de deslocamentos a esforços é necessário determinar as
deformações, o que implica o cálculo de segundas derivadas). Por sua vez, a precisão
conseguida para a aproximação do campo de momentos flectores é superior à que
é conseguida para o campo de esforços transversos (os segundos são determinados
através do cálculo da primeira derivada dos campos de momentos). Estas observações
são confirmadas qualitativamente pela análise das figuras 3.26, 3.27 e 3.28.
56
3.3.3
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Análise de convergência
Na figura 3.29 apresentam-se os diagramas de momentos flectores (coluna da esquerda)
e os diagramas de esforços transversos (coluna da direita) que se obtêm quando se
consideram discretizações envolvendo malhas com 4, 8 , 16 e 64 elementos de iguais
dimensões. A análise desta figura permite verificar que a convergência para a solução
exacta é mais rápida no caso dos diagramas de momentos flectores. Para uma malha
com oito elementos é já difı́cil distinguir a solução exacta da solução aproximada,
embora esta seja constituı́da apenas por troços rectos em cada um dos elementos da
malha considerada.
Já no caso do diagrama de esforços transversos, a obtenção de uma solução próxima da
solução exacta requer a consideração de malhas com um número maior de elementos
finitos.
3.4
Análise de uma viga contı́nua (exemplo 2)
Considere-se agora a análise da estrutura representada na figura 3.30. Em relação aos
exemplos anteriores, surge neste caso uma novidade que corresponde à existência de
uma carga concentrada aplicada a meio-vão da barra BC.
3.4.1
Discretização da estrutura
A existência de uma carga concentrada introduz uma descontinuidade no diagrama de
esforços transversos na secção de meio-vão da barra BC.
Em cada elemento finito é definida uma aproximação polinomial do terceiro grau para
o campo de deslocamentos transversais. Essa aproximação é contı́nua e com derivadas
contı́nuas no domı́nio desse elemento. Desta forma, a aproximação para o campo
de curvaturas e para o campo de momentos flectores são também contı́nuas. Por
este motivo, a única hipótese de se conseguir modelar a descontinuidade existente no
diagrama de esforço transverso corresponde a considerar um nó da discretização na
secção de aplicação da carga concentrada.
Esta é uma situação geral em modelações com recurso ao método dos elementos finitos.
Sempre que existam cargas concentradas, é sempre conveniente considerar malhas que
contenham nós nos pontos de aplicação dessas cargas.
Na figura 3.31 apresenta-se a discretização considerada na análise da estrutura. A malha considera três elementos. No domı́nio do elemento 1 há uma carga uniformemente
distribuı́da. Por este motivo, a solução exacta para o campo de deslocamentos transversais deverá ser do quarto grau, pelo que a discretização efectuada permite apenas a
obtenção de uma solução aproximada. Para se poder obter uma solução mais próxima
3.4. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 2)
57
2
0
4 elementos
1.5
4 elementos
1
0.5
0.5
1
0
−0.5
1.5
−1
−1.5
2
−2
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
3
3.5
4
2
0
8 elementos
8 elementos
1.5
1
0.5
0.5
1
0
−0.5
1.5
−1
−1.5
2
−2
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
3
3.5
4
2
0
16 elementos
16 elementos
1.5
1
0.5
0.5
1
0
−0.5
1.5
−1
−1.5
2
−2
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
3
3.5
4
2
0
64 elementos
64 elementos
1.5
1
0.5
0.5
1
0
−0.5
1.5
−1
−1.5
2
−2
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 3.29: Diagramas de momentos flectores [kN m] e diagramas de esforços transversos [kN ]
58
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Figura 3.30: Análise de uma viga contı́nua - exemplo 2
da solução exacta seria necessário considerar uma malha com uma maior número de
elementos no troço AB da estrutura em análise.
Figura 3.31: Discretização da viga contı́nua - exemplo 2
3.4.2
Identificação dos deslocamentos independentes
Na figura 3.32 identificam-se os deslocamentos independentes a considerar na análise
da estrutura.
Figura 3.32: Identificação dos deslocamentos independentes
3.4. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 2)
3.4.3
59
Definição da aproximação
A aproximação para o campo de deslocamentos em cada um dos elementos da malha
é efectuada tendo em conta as equações (3.3). Para definir a aproximação em função
dos deslocamentos independentes da estrutura, é necessário ter em conta o conteúdo
da tabela de incidências.
Elemento
q1
q2
q3
q4
1
d1
d2
−
−
2
d2
d3
−
d4
3
d3
−
d4
−
Tabela 3.4: Tabela de incidências para a malha com 3 elementos
A aproximação para o campo de deslocamentos em cada um dos elementos da malha
pode ser expressa na seguinte forma (no referencial local de cada elemento finito):
3.4.4
w(x1 ) = ψ1 (x1 ) d1 + ψ2 (x1 ) d2
(3.127)
w(x2 ) = ψ1 (x2 ) d2 + ψ2 (x2 ) d3 + ψ4 (x2 ) d4
(3.128)
w(x3 ) = ψ1 (x3 ) d3 + ψ3 (x3 ) d4
(3.129)
Definição das equações elementares
É primeiro necessário determinar a matriz de rigidez para cada um dos elementos da
malha de elementos finitos. Tendo em conta a equação (3.28) e o comprimento de cada
um dos elementos, é possı́vel concluir que:
(1)
K = EI
4
4
2
4
6
42
−6
42
2
4
4
4
6
42
−6
42
6
42
6
42
12
43
−12
43
−6
42
−6
42
−12
43
12
43
(3.130)
60
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
(2)
(3)
K = K = EI
2
2
4
2
6
22
−6
22
4
2
2
2
6
22
−6
22
6
22
6
22
12
23
−12
23
−6
22
−6
22
−12
23
12
23
(3.131)
Tendo em conta as cargas de vão aplicadas em cada um dos elementos da discretização,
os vectores das forças nodais equivalentes elementares são dados pelas seguintes igualdades:
−5 × 42
12
2
5×4
12
F(1) = EI
(3.132)
−5 × 4
2
−5 × 4
2
0
0
F(2) = F(3) = EI
0
(3.133)
0
3.4.5
Reunião das equações elementares
Utilizando a informação apresentada na tabela de incidências, é possı́vel escrever as
seguintes definições:
(1)
k12 = k12
(1)
k22 = k22 + k11
k11 = k11
k21 = k21
(1)
(1)
(2)
k21
k31 = 0
k32 =
k41 = 0
k42 = k21
(2)
k13 = 0
(2)
k14 = 0
(2)
(2)
k23 = k12
k33 =
(2)
k22
(2)
k24 = k14
+
(3)
k11
(3)
k43 = k42 + k31
k34 =
(2)
k24
(2)
+
(3)
k13
(3.134)
(3)
k44 = k44 + k33
Substituindo nas igualdades anteriores as definições de cada uma das matrizes de rigidez
elementares é possı́vel obter:
3.4. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 2)
4/4
2/4
0
2/4 4/4 + 4/2
K∗ = EI
0
2/2
−6/22
0
61
0
2
2
−6/2 + 6/2
−6/22
2/2
4/2 + 4/2
(3.135)
−6/22 + 6/22 12/23 + 12/23
1
1/2
K∗ = EI
0
0
1/2
0
0
3
1 −3/2
1
4
0
−3/2 0
3
(3.136)
O vector das forças nodais equivalentes é determinado através das igualdades:
(1)
F = F1nodal + F1
1
F = F nodal + F (1) + F (2)
2
2
1
2
F=
(3)
(2)
F3 = F3nodal + F2 + F1
(2)
(3.137)
(3)
F4 = F4nodal + F4 + F3
Substituindo valores obtém-se:
F1
0 + (−5 × 42 /12)
F
0 + 5 × 42 /12) + 0
2
F=
=
F3
0+0+0
F4
3.4.6
−20/3
20/3
=
0
(−10) + 0 + 0
(3.138)
−10
Resolução da equação do método dos elementos finitos
A resolução da equação do método dos elementos finitos conduz aos seguintes valores
para os deslocamentos independentes:
d=
170
−
21
d1
20
d2
1
7
=
EI
5
d3
−
7
d4
40
−
21
(3.139)
62
3.4.7
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Análise da solução aproximada obtida
Tendo em conta a aproximação definida para o campo de deslocamentos transversais
no elemento 1 e os valores dos deslocamentos independentes da estrutura, é possı́vel
determinar:
w(x1 ) =
³
´
5
x1 272 − 112 x1 + 11 x21
168 EI
(3.140)
A aproximação para o campo de curvaturas é definida tendo em conta as condições de
compatibilidade no domı́nio.
χ(x1 ) = −
d2 w(x1 )
1
=
2
dx1
EI
µ
20 55 x1
−
3
28
¶
(3.141)
A aplicação das relações constitutivas permite determinar a seguinte expressão para o
campo de momentos flectores no elemento 1:
M (x1 ) = EI χ(x1 ) =
20 55 x1
−
3
28
(3.142)
A aproximação obtida para o campo de esforços transversos é a seguinte:
V (x1 ) =
dM (x1 )
55
=−
dx1
28
(3.143)
Repetindo o mesmo tipo de raciocı́nio é possı́vel obter para o elemento 2 as seguintes
igualdades:
w(x2 ) =
χ(x2 ) = −
³
´
−5
x2 48 − 66 x2 + 17 x22
84 EI
(3.144)
d2 w(x2 )
5
(−22 + 17 x2 )
=
2
dx2
14 EI
(3.145)
M (x2 ) = EI χ(x2 ) =
V (x2 ) =
Para o elemento 3 obtém-se:
5
(−22 + 17 x2 )
14
dM (x2 )
5 × 17
85
=
=
dx2
14
14
(3.146)
(3.147)
3.4. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 2)
w(x3 ) =
5
(−2 + x3 )2 (8 + 11 x3 )
84 EI
χ(x3 ) = −
d2 w(x3 )
1
=
2
dx3
EI
M (x3 ) = EI χ(x3 ) =
V (x3 ) =
µ
30 55 x3
−
7
14
30 55 x3
−
7
14
dM (x3 )
55
=−
dx3
14
63
(3.148)
¶
(3.149)
(3.150)
(3.151)
Com base na utilização das equações anteriores, é possı́vel calcular o valor aproximado
de todas as grandezas que caracterizam o comportamento desta viga contı́nua para
qualquer secção que se pretenda estudar. Basta para tal identificar a que elemento
pertence essa secção, determinar as coordenadas dessa secção no referencial local e
utilizar a equação correspondente.
Na figura 3.33 apresenta-se a deformada obtida com a discretização considerada. O
campo de deslocamentos flectores e o campo de esforços transversos apresentam-se nas
figuras 3.34 e 3.35, respectivamente. Estes diagramas podem ser obtidos, para cada
um dos elementos da malha, através da utilização directa das equações apresentadas
nesta subsecção.
Figura 3.33: Campo de deslocamentos transversais obtido considerando a malha com 3
elementos
Figura 3.34: Campo de momentos flectores [kNm] obtido considerando a malha com 3
elementos
Figura 3.35: Campo de esforços transversos [kN] obtido considerando a malha com 3
elementos
64
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Poder-se-à perguntar agora se a solução aproximada obtida corresponde à solução
exacta para o problema. Tendo em conta que na barra AB existe aplicada uma carga
uniformemente distribuı́da, é possı́vel afirmar desde logo que a solução exacta para o
campo de deslocamentos transversais terá de corresponder a um polinómio do quarto
grau. Como a aproximação definida para o campo de deslocamentos é de grau inferior,
é de esperar que a solução obtida seja apenas aproximada.
Para demonstrar que de facto assim é, pode efectuar-se a verificação local de todas as
condições de equilı́brio. Estas incluem a verificação do equilı́brio no domı́nio, na fronteira estática e na fronteira entre elementos. Se se atender a que no nó A a verificação
da condição de equilı́brio na fronteira impõe que M (x1 = 0) = 0kN m e tendo em
conta que na solução aproximada obtida se tem M (x1 = 0) = 6.7kN m 6= 0, é imediato
concluir que a soplução obtida não exacta.
Nas figuras 3.36, 3.37 e 3.38 apresenta-se a deformada e os campos de esforços exactos
para a estrutura em análise. É fácil verificar que a solução aproximada obtida com
recurso à malha com três elementos ainda se encontra longe da solução exacta, em
especial para o caso dos campos de esforços no troço AB. Para recuperar a solução
exacta, poderia ser somada uma solução particular à aproximação definida para o
campo de deslocamentos no elemento de viga que está sujeito à acção da carga de vão.
Esta correcção encontra-se discutida de forma detalhada na secção 3.3.
Figura 3.36: Campo de deslocamentos transversais [m] exacto
Figura 3.37: Campo de momentos flectores [kNm] exacto
Figura 3.38: Campo de esforços transversos [kN] exacto
Para melhorar a qualidade da solução obtida torna-se necessário considerar uma discretização mais fina no troço AB da estrutura. Nas figuras 3.39, 3.40 e 3.41 apresenta-se
a solução aproximada obtida considerando uma malha com 10 elementos finitos (8
elementos de igual dimensão são utilizados na discretização do troço AB).
A diferença entre os diagramas de momentos flectores exacto e aproximado são já
pouco perceptı́veis, mesmo tendo em conta que na solução aproximada este campo de
3.4. ANÁLISE DE UMA VIGA CONTÍNUA (EXEMPLO 2)
65
esforços varia lineramente em cada um dos elementos. No entanto, a diferença é mais
notória no caso do diagrama dos esforços transversos, tendo em conta que neste caso a
aproximação corresponde à definição de um valor constante em cada um dos elementos
da malha.
Figura 3.39: Campo de deslocamentos transversais obtido considerando a malha com
11 elementos
Figura 3.40: Campo de momentos flectores [kNm] obtido considerando a malha com 11
elementos
Figura 3.41: Campo de esforços transversos [kN] obtido considerando a malha com 11
elementos
66
CAPÍTULO 3. ANÁLISE DE VIGAS DE EULER-BERNOULLI
Capı́tulo 4
Análise de pórticos planos
Neste capı́tulo é generalizada a formulação de elementos finitos por forma a ser possı́vel
a análise de pórticos planos. Considera-se que cada barra pode estar sujeita a cargas
actuando segundo qualquer direcção, desde que pertencente ao plano da estrutura.
Desta forma, as grandezas que se torna necessário conhecer para caracterizar o comportamento deste tipo de elemento estrutural correspondem à reunião das grandezas
fı́sicas que foram consideradas no caso dos elementos de barra e dos elementos de viga.
Continua a desprezar-se a deformação por corte.
Na primeira secção deste capı́tulo recapitulam-se de forma sucinta as grandezas e as
equações que são utilizadas para caracterizar o comportamento de pórticos planos. De
seguida é apresentada a formulação de elementos finitos. Como de costume, definese a aproximação para os campos de deslocamentos e apresentam-se as equações que
permitem a determinação das matrizes de rigidez elementares e dos vectores das forças
nodais equivalentes.
Como num pórtico plano as barras podem ter uma orientação genérica, a construção
da equação de equilı́brio global requer que as equações elementares venham expressas
no referencial global da estrutura e não nos referenciais locais associados a cada um
dos elementos de barra considerados na discretização. Na terceira secção deste capı́tulo
discute-se o procedimento que permite efectuar esta mudança de referencial. Primeiro
define-se a aproximação para os campos de deslocamentos em função dos deslocamentos
nodais elementares expressos no referencial global e de seguida escrevem-se as equações
elementares nesse mesmo referencial.
O capı́tulo termina com a apresentação e discussão de um exemplo de aplicação.
67
68
4.1
4.1.1
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Formulação do problema
Definição das grandezas fı́sicas
Nesta secção definem-se as grandezas fı́sicas que é necessário conhecer para caracterizar
o comportamento de um elemento de pórtico plano. Para caracterizar os campos de
deslocamentos é necessário determinar o campo de deslocamentos transversais, w(x),
e o campo de deslocamentos longitudinais, u(x). Sendo desprezada a deformação por
corte, o campo de rotações não é independente do campo de deslocamentos transversais,
podendo ser calculado directamente a partir da aplicação da equação (2.36). O vector
que lista os campos de deslocamentos neste tipo de elemento estrutural pode ser escrito
na forma:
w(x)
u=
(4.1)
u(x)
Para caracterizar a alteração da forma de cada peça são utilizados dois campos de
deformações independentes, o campo de curvaturas, χ(x), e o campo de extensões
axiais, ε(x). O vector que lista as componentes de deformação assume neste caso a
seguinte constituição:
χ(x)
e=
(4.2)
ε(x)
Num elemento de pórtico plano definem-se três campos de esforços: momento flector,
M (x), esforço transverso, V (x) e esforço normal, N (x). O vector que reune os campos
de esforços pode ser apresentado no seguinte formato:
M (x)
s=
V (x)
(4.3)
N (x)
Considera-se por fim que no domı́nio de cada elemento podem estar aplicadas cargas
distribuı́das segundo a direcção transversal, p(x) e segundo a direcção longitudinal,
q(x). O vector que lista as componentes independentes do carregamento de vão aplicado
vem expresso na seguinte forma:
p=
4.1.2
p(x)
q(x)
(4.4)
Condições de compatibilidade
As equações de compatibilidade no domı́nio definem a relação entre os campos de
deformação e os campos de deslocamentos. Tendo em conta as equações definidas para
4.1. FORMULAÇÃO DO PROBLEMA
69
o caso dos elementos de barra e para o caso dos elementos de viga de Euler-Bernoulli,
é possı́vel escrever:
d2
0 w(x)
−
χ(x)
2
dx
=
(4.5)
d u(x)
ε(x)
0
dx
A equação (4.5) permite verificar que o operador diferencial de compatibilidade a considerar para a formulação do elemento finito de pórtico plano tem a seguinte constituição:
d2
−
d x2
A=
0
4.1.3
0
d
dx
(4.6)
Relações de elasticidade
As relações constitutivas permitem relacionar os campos de esforços com os campos de
deformações. Assumindo para o material estrutural um comportamento elástico linear,
é possı́vel escrever:
EI 0
M (x)
χ(x)
=
(4.7)
N (x)
ε(x)
0 EA
Esta equação permite verificar que o operador de elasticidade assume a seguinte forma
para o caso dos elementos de pórtico plano:
D=
4.1.4
EI
0
0
EA
(4.8)
Condições de equilı́brio
As condições de equilı́brio no domı́nio permitem relacionar os campos de esforços com
os carregamentos aplicados. No caso de uma barra pertencente a um pórtico plano é
possı́vel escrever:
d2
d x2
0
0
M (x) p(x)
=
+
N (x)
0
q(x)
0
d
dx
(4.9)
Para a determinação do campo de esforços transversos deve ser aplicada a condição de
equilı́brio apresentada na equação (2.43).
70
4.1.5
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Equações para a barra e condições de fronteira
Para se obter o conjunto de equações diferenciais que rege o comportamento das barras
pertencentes a pórticos planos é possı́vel efectuar a reunião das condições de equilı́brio,
compatibilidade e elasticidade. Obtém-se:
p(x)
d4 w(x)
=
d x4
EI
(4.10)
q(x)
d2 u(x)
=−
2
dx
EA
(4.11)
A consideração das equações diferenciais no domı́nio não permite, por si só, que se
consiga determinar a solução para o problema que se coloca. Para que a análise se
possa efectuar, torna-se indispensável que se especifiquem as condições de fronteira
para o problema.
As condições de fronteira podem ser de dois tipos: as condições de fronteira cinemática,
nas quais se especifica qual o valor dos deslocamentos numa determinada fronteira, e
as condições de fronteira estática, que passam pela imposição de um determinado valor
para as cargas directamente aplicadas nessa fronteira.
Na figura 4.1 listam-se os tipos de apoio que podem ser considerados na análise de um
pórtico plano.
Figura 4.1: Tipos de apoio a considerar
Numa extremidade encastrada, há três condições de fronteira cinemática a verificar. O
deslocamento transversal, o deslocamento longitudinal e a rotação devem ser nulos. Se
4.2. FORMULAÇÃO DO ELEMENTO FINITO DE PÓRTICO PLANO
71
esse apoio estiver a restringir o no nó inicial da barra, é possı́vel escrever:
w(x = 0) = 0 ,
u(x = 0) = 0 ,
θ(x = 0) = 0
(4.12)
Num nó com um apoio fixo, os deslocamentos transversal e longitudinal devem ser
nulos e o momento flector deve ser igual ao momento concentrado que eventualmente
aı́ esteja aplicado. Particularizando de novo para o nó inicial é possı́vel escrever:
w(x = 0) = 0 ,
u(x = 0) = 0 ,
M (x = 0) = m
(4.13)
Num nó com um apoio móvel, o deslocamento transversal é nulo. O momento flector e
o esforço normal devem ser iguais ao momento concentrado e à força longitudinal que
eventualmente aı́ estejam aplicados. Particularizando de novo para o nó inicial:
w(x = 0) = 0 ,
M (x = 0) = m ,
N (x = 0) = g
(4.14)
Num nó onde exista um encastramento deslizante, devem ser nulos o deslocamento
longitudinal e a rotação nessa secção. O esforço transverso deve ser igual ao valor da
força transversal que aı́ esteja aplicada. Particularizando para o nó inicial é possı́vel
escrever:
u(x = 0) = 0 , θ(x = 0) = 0 , V (x = 0) = f
(4.15)
Finalmente, numa extremidade livre especificam-se três condições de fronteira estática.
O momento flector, o esforço transverso e o esforço normal devem ser iguais às cargas
concentradas que nessa secção estejam aplicadas. Escreve-se:
V (x = 0) = f
,
M (x = 0) = m ,
N (x = 0) = g
(4.16)
Problema 4.1 Estabeleça as condições de fronteira associadas à existência de um apoio
móvel que restrige a translacção numa direcção que faz um ângulo α com a direcção
vertical.
4.2
4.2.1
Formulação do elemento finito de pórtico plano
Definição da aproximação
No caso do elemento de barra pertencente a um pórtico plano, é necessário definir
duas aproximação independentes, uma para o campo de deslocamentos transversais,
w(x), e uma segunda para o campo de deslocamentos longitudinais, u(x). Na definição
destas duas aproximações utilizam-se as funções definidas no estudo dos elementos de
viga e de barra e consideram-se os deslocamentos nodais elementares representados na
figura 4.2.
72
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Figura 4.2: Identificação dos deslocamentos nodais elementares
A aproximação para os campos de deslocamentos é definida por:
"
w(x)
u(x)
#
ψ1 (x) ψ2 (x) ψ3 (x) ψ4 (x)
0
0
=
0
0
0
0
ψ5 (x) ψ6 (x)
q1
q2
q3
q4
q5
q6
(4.17)
Se se definirem as funções de aproximação no referencial local, a matriz das funções de
aproximação vem dada por:
Ψ=
−x +
2 x2
L
−
x3
L2
x2
L
0
−
x3
L2
−1 +
0
3 x2
L2
−
2 x3
L3
−3 x2
L2
0
+
2 x3
L3
0
0
0
1−
x
L
x
L
(4.18)
Por simplicidade, na equação anterior denotou-se apenas por x o sistema de eixos local,
em vez de se utilizar a notação antes utilizada, xe .
Para o elemento de pórtico plano, a matriz B tem duas linhas (porque neste tipo de
elemento estrutural se consideram dois campos de deformações) e seis colunas (porque existem seis deslocamentos nodais elementares). Tendo em conta as funções de
aproximação determinadas anteriormente, é possı́vel verificar que:
B = AΨ =
2
− ddx2
0
0
d
dx
ψ1 (x) ψ2 (x) ψ3 (x) ψ4 (x)
0
0
0
0
0
0
ψ5 (x) ψ6 (x)
(4.19)
Desenvolvendo, obtém-se:
d2 ψ1 (x)
d2 ψ2 (x)
d2 ψ3 (x)
d2 ψ4 (x)
−
−
−
−
d x2
d x2
d x2
d x2
B=
0
0
0
0
0
dψ5 (x)
dx
0
dψ6 (x)
(4.20)
dx
Substituindo na igualdade anterior a definição das funções de aproximação e simplifi-
4.2. FORMULAÇÃO DO ELEMENTO FINITO DE PÓRTICO PLANO
73
cando as expressões resultantes é possı́vel obter:
−4
6x
L + L2
B=
−2 6 x
+ 2
L
L
−6 12 x
+ 3
L2
L
12 x
6
− 3
2
L
L
0
0
0
0
0
−
1
L
0
1
L
(4.21)
Cada uma das colunas da matriz B tem de novo um significado fı́sico bem preciso. Assim, a coluna j da matriz B contém os campos de deformações (curvaturas na primeira
linha e extensões axiais na segunda) que surgem no elemento de pórtico plano quando
se impõe qj = 1 e se garante que todos os restantes deslocamentos independentes são
nulos, qk = 0 com k 6= j.
4.2.2
Definição da matriz de rigidez elementar
A matriz de rigidez elementar permite relacionar os deslocamentos nodais elementares,
qi , com as correspondentes forças nodais, Fi , pelo que no elemento de pórtico plano
tem seis linhas e seis colunas.
O seu cálculo passa pela aplicação da equação geral (3.26). Tendo em conta as matrizes
B e D definidas respectivamente por (4.21) e (4.8), obtém-se:
4 EI
L
2 EI
L
6 EI
L2
(el)
K =
−6 EI
L2
0
0
2 EI
L
6 EI
L2
−6 EI
L2
0
4 EI
L
6 EI
L2
−6 EI
L2
0
6 EI
L2
12 EI
L3
−12 EI
L3
0
−6 EI
L2
−12 EI
L3
12 EI
L3
0
0
0
0
EA
L
0
0
0
− EA
L
0
0
0
0
EA
− L
(4.22)
EA
L
A coluna i da rigidez elementar possui o significado fı́sico habitual: colige o valor das
forças nodais que estão associadas à imposição da deformada caracterizada por qi = 1.0
e qm = 0.0, com m 6= i.
Na matriz de rigidez elementar apresentada em (4.22) reconhecem-se com facilidade
dois blocos com a constituição das matrizes de rigidez elementar definidas para o caso
dos elementos de viga de Euler-Bernoulli e para o caso dos elementos de barra com
definição de uma aproximação linear para o campo de deslocamentos longitudinal.
74
4.2.3
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Forças nodais equivalentes
Considere-se agora que no domı́nio do elemento estão aplicadas duas cargas distribuı́das
trapezoidais, uma na direcção transversal, p(x), e a segunda na direcção longitudinal,
qx , com as seguintes definições:
x
(p2 − p1 )
L
x
q(x) = q1 + (q2 − q1 )
L
p(x) = p1 +
(4.23)
(4.24)
Para a determinação do vector das forças nodais equivalentes, deve ser aplicada a
equação genérica (3.29). Tendo em conta a matriz das funções de aproximação definida
para o caso dos pórticos planos obtém-se:
Z L
F(el) =
0
ψ1 (x)
0
ψ2 (x)
0
ψ3 (x)
0
ψ4 (x)
0
0
ψ5 (x)
0
ψ6 (x)
"
#
Z L
p(x)
q(x) dx =
0
ψ1 (x) p(x)
ψ2 (x) p(x)
ψ3 (x) p(x)
ψ4 (x) p(x)
ψ5 (x) q(x)
ψ6 (x) q(x)
dx
(4.25)
Tendo em conta as expressões definidas para as funções de aproximação e para os
carregamentos longitudinal e transversal vem:
(el)
F =
− (L2 (3 p1 + 2 p2))
60
L2 (2 p1 + 3 p2)
60
− (L (7 p1 + 3 p2))
20
− (L (3 p1 + 7 p2))
20
(2 f 1 + f 2) L
6
(f 1 + 2 f 2) L
6
(4.26)
Caso estejam aplicadas no domı́nio do elemento carregamentos longitudinais e transversais uniformemente distribuı́dos, o vector das forças nodais equivalentes passa a ser
4.3. DEFINIÇÃO DA MUDANÇA DE REFERENCIAL
definido por:
(el)
F =
4.3
−L2 p
12
L2 p
12
−L p
2
−L p
2
Lq
2
Lq
2
75
(4.27)
Definição da mudança de referencial
Quando se analisam pórticos planos, é necessário tratar barras com inclinação genérica.
Para construir a equação de equilı́brio global com base na reunião da contribuição de
cada um dos elementos, é conveniente que os operadores elementares (matrizes de
rigidez e vector das forças nodais equivalentes) venham expressos no referencial global
da estrutura. Para que tal seja possı́vel, é necessário proceder a uma mudança de
referencial.
Figura 4.3: Definição da mudança de referencial
Para definir esta mudança de referencial, é necessário determinar a relação existente
entre os deslocamentos nodais elementares expressos no referencial local do elemento
76
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
finito e os deslocamentos nodais elementares expressos no referencial global. A relação
entre estes conjuntos de deslocamentos, os quais se encontram representados na figura
4.3, é estabelecida através da definição de uma matriz de transformação.
Uma vez construı́da essa matriz de transformação, é possı́vel redefinir a aproximação
para os campos de deslocamentos em cada elemento finito para tornar possı́vel a obtenção da equações para os campos de deslocamentos transversais e longitudinais, w(x)
e u(x), em função dos deslocamento nodais elementares expressos no referencial global.
A mesma matriz de transformação vai depois permitir a obtenção dos operadores elementares, matrizes de rigidez e vector das forças nodais equivalentes, quando se consideram forças e deslocamentos elementares expressos no referencial da estrutura.
4.3.1
Definição da matriz de transformação
A matriz de transformação, T, vai permitir relacionar os deslocamentos nodais elementares expressos no referencial local de cada elemento finito, q, e no referencial global
da estrutura, u. Esta relação pode ser expressa no formato:
q = Tu
(4.28)
Figura 4.4: Definição das colunas 4 e 6 da matriz de transformação
A matriz de transformação tem um número de linhas igual ao número de deslocamentos
nodais no referencial local (seis) e um número de colunas determinado pelo número de
deslocamentos nodais no referencial global (seis). Cada uma das colunas dessa matriz
de transformação tem o seguinte significado fı́sico: a coluna j de T lista o valor de
cada um dos deslocamentos nodais elementares expressos no referencial local que surge
4.3. DEFINIÇÃO DA MUDANÇA DE REFERENCIAL
77
quando se impõe o deslocamento nodal elementar global uj com valor unitário e se
garante que os restantes são nulos, ou seja, quando uj = 1 e uk = 0 quando k 6= j.
A figura 4.4 ilustra a construção das colunas 4 e 6 da matriz de transformação. Nesta
figura, c = cos(θ) e s = sen(θ), onde θ é o ângulo formado pelo eixo da barra e
a direcção global x. Desenvolvendo um raciocı́nio semelhante para cada uma das
restantes quatro possı́veis deformadas, é possı́vel identificar a constituição de cada
uma das restantes colunas da matriz de transformação, T. É possı́vel verificar que:
1
0
0
T=
0
0
0
0
1
0
0
0
0
0
0
c
0
s
0
0 0
0
0 0
0
0 −s 0
c 0 −s
0 c
0
s 0
c
(4.29)
A relação entre os deslocamentos nodais elementares expressos nos dois referenciais
vem desta forma dada pela igualdade:
4.3.2
q1
q2
q3
q4
q5
q6
1
0
0
=
0
0
0
1
0
0
0
0 0
0
0
c
0
s
0
0 0
0
0 0
0
0 −s 0
c 0 −s
0 c
0
s 0
c
u1
u2
u3
u4
u5
u6
=
u1
u2
c u3 − s u 5
c u4 − s u 6
s u 3 + c u5
s u 4 + c u6
(4.30)
Definição da aproximação
Os campos de deslocamentos longitudinais e transversais podem ser definidos em função
dos deslocamentos nodais elementares expressos no referencial global. Tendo em conta
(4.30) e a definição para a aproximação (4.17) é possı́vel escrever:
"
#
ψ1 (x) ψ2 (x) ψ3 (x) ψ4 (x)
0
0
w(x)
=
u(x)
0
0
0
0
ψ5 (x) ψ6 (x)
u1
u2
c u3 − s u 5
c u4 − s u 6
s u 3 + c u5
s u 4 + c u6
(4.31)
78
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
4.3.3
Matriz de rigidez elementar
Para se definir a matriz de rigidez elementar quando se considera o referencial global
da estrutura é necessário ter em conta a definição geral [7]:
K(el)
= Tt K(el) T
g
(4.32)
Tendo em conta (4.22) e (4.29) obtém-se a seguinte constituição para a matriz K(el)
g :
4 EI
L
2 EI
L
6 c EI
L2
−6 c EI
L2
−6 EI s
L2
6 EI s
L2
2 EI
L
6 c EI
L2
−6 c EI
L2
−6 EI s
L2
4 EI
L
6 c EI
L2
−6 c EI
L2
−6 EI s
L2
6 c EI
L2
12 c2 EI
L3
−6 c EI
L2
−12 c2 EI
L3
−
EA s2
L
12 c2 EI
L3
+
EA s2
L
12 c EI s
L3
−6 EI s
L2
−12 c EI s
L3
+
c EA s
L
12 c EI s
L3
−
c EA s
L
c2 EA
L
6 EI s
L2
12 c EI s
L3
+
−
EA s2
L
c EA s
L
−12 c2 EI
L3
−12 c EI s
L3
−
+
EA s2
L
c EA s
L
−12 c EI s
L3
2
−c
+
−
+
EA
L
6 EI s
L2
c EA s
L
12 EI s2
L3
−
12 c EI s
c EA s
−
L
L3
−12 c EI s
c EA s
+
3
L
L
c2 EA
12 EI s2
− L − L3
6 EI s
L2
c EA s
L
12 EI s2
L3
c2 EA
L
+
12 EI s2
L3
(4.33)
A coluna i da rigidez elementar K(el)
possui o significado fı́sico habitual: lista o valor das
g
forças nodais (agora expressas no referencial global da estrutura) que estão associadas
à imposição da deformada caracterizada por ui = 1.0 e um = 0.0, com m 6= i.
4.3.4
Vector das forças nodais equivalentes
Para definir o vector das forças nodais equivalentes no referencial global da estrutura
é necessário ter em conta a equação [7]:
F(el)
= Tt F(el)
g
(4.34)
Quando se consideram cargas distribuı́das trapezoidais, a consideração de (4.29) e
(4.26) permite determinar:
−(L2 (3 p1+2 p2))
60
L2 (2 p1+3 p2)
60
−(c L (7 p1+3 p2))
2) L s
+ (2 f 1+f
20
6
(el)
Fg =
−(c L (3 p1+7 p2))
+ (f 1+26f 2) L s
20
c (2 f 1+f 2) L + L (7 p1+3 p2) s
6
20
c (f 1+2 f 2) L
6
+
L (3 p1+7 p2) s
20
(4.35)
4.4. ANÁLISE DE UM PÓRTICO PLANO
79
Caso se considerem cargas uniformemente distribuı́das, e tendo em conta a definição
(4.27), é possı́vel obter:
−(L2 p)
12
L2 p
12
−(c L p)
+ L 2q s
2
(el)
Fg ==
−(c L p)
+ L 2q s
2
cLq
+ L 2p s
2
cLq
2
4.4
+
(4.36)
Lps
2
Análise de um pórtico plano
A aplicação do método dos elementos finitos na análise de pórticos planos é agora
ilustrada através da resolução da estrutura representada na figura 4.5.
Figura 4.5: Análise de um pórtico plano
4.4.1
Discretização da estrutura
Na figura 4.6 apresenta-se a discretização utilizada na análise da estrutura. A malha
considera três elementos finitos. Como na barra BC existe uma carga uniformemente
distribuı́da, o campo de deslocamentos transversais exacto corresponde a um polinómio
de quarto grau. Como na aproximação desse campo de deslocamentos apenas se utilizam polinómios de terceiro grau, a solução que se irá obter é apenas aproximada.
80
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Figura 4.6: Discretização do pórtico plano
4.4.2
Identificação dos deslocamentos independentes
Na figura 4.7 identificam-se os deslocamentos independentes a considerar na análise da
estrutura.
Figura 4.7: Identificação dos deslocamentos independentes
4.4.3
Definição da aproximação
Na figura 4.8 identificam-se os deslocamentos nodais elementares que vão ser utilizados
na definição da aproximação para os campos de deslocamentos transversais e longitudinais em cada um dos elementos de viga. Estes deslocamentos nodais encontram-se
expressos no referencial global da estrutura. De acordo com a definição da aproximação
para os campos de deslocamentos em cada elemento apresentada em (4.31) e tendo em
conta a inclinação de cada elemento de barra (ângulo entre o eixo da barra e a direcção
4.4. ANÁLISE DE UM PÓRTICO PLANO
81
Figura 4.8: Identificação dos deslocamentos elementares expressos no referencial global
x do referencial global da estrutura) pode escrever-se:
"
w(x1 )
u(x1 )
#
ψ1 (x1 ) ψ2 (x1 ) ψ3 (x1 ) ψ4 (x1 )
0
0
=
0
0
0
ψ5 (x1 ) ψ6 (x1 )
0
"
w(x2 )
u(x2 )
#
=
ψ1 (x2 ) ψ2 (x2 )
0
0
ψ3 (x2 ) ψ4 (x2 )
0
0
0
0
ψ5 (x2 ) ψ6 (x2 )
u1
u2
−u5
−u6
u3
u4
u1
u2
u3
u4
u5
u6
(4.37)
(4.38)
u1
u2
"
#
u3
√
+ √u52
0
0
ψ1 (x3 ) ψ2 (x3 ) ψ3 (x3 ) ψ4 (x3 )
2
w(x3 )
=
u4
u6
u(x3 )
√ + √
0
0
0
ψ5 (x3 ) ψ6 (x3 )
0
2
2
u3
−√
+ √u52
2
− √u42 +
u6
√
2
(4.39)
82
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Para definir a aproximação em função dos deslocamentos independentes da estrutura,
é necessário ter em conta o conteúdo da tabela de incidências 4.1.
Elemento
u1
u2
u3
u4
u5
u6
1
−
d1
−
−
−
−
2
d1
d2
−
d3
−
d4
3
d2
−
d3
−
d4
−
Tabela 4.1: Tabela de incidências para a malha de elementos finitos
Tendo em conta a informação disponibilizada na tabela 4.1, é possı́vel escrever as
aproximações (4.37), (4.38) e(4.39) em função dos deslocamentos independentes da
estrutura.
"
w(x1 )
u(x1 )
#
ψ1 (x1 ) ψ2 (x1 ) ψ3 (x1 ) ψ4 (x1 )
0
0
=
0
0
0
ψ5 (x1 ) ψ6 (x1 )
0
"
w(x2 )
u(x2 )
#
0
0
ψ1 (x2 ) ψ2 (x2 ) ψ3 (x2 ) ψ4 (x2 )
=
0
0
0
0
ψ5 (x2 ) ψ6 (x2 )
"
w(x3 )
u(x3 )
#
=
ψ1 (x3 ) ψ2 (x3 ) ψ3 (x3 )
0
0
0
0
d1
0
0
0
0
d1
d2
0
d3
0
d4
(4.40)
(4.41)
d2
0
d3
d4
√ +√
ψ4 (x3 )
0
0
2
2
0
0
√ + √
0
ψ5 (x3 ) ψ6 (x3 )
2
2
d3
−√
+ √d42
2
− √02 +
√0
2
(4.42)
4.4. ANÁLISE DE UM PÓRTICO PLANO
4.4.4
83
Definição das equações elementares
Tendo em conta a definição (4.33) e a inclinação de cada uma das barras, é possı́vel
obter as seguintes matrizes de rigidez elementares:
EI
2
0
(1)
Kg =
0
−3 EI
8
EI
2
EI
−3 EI
8
3 EI
8
0
0
−3 EI
16
EI
0
0
0
EA
4
−EA
4
0
0
−EA
4
EA
4
0
−3 EI
8
0
0
3 EI
16
3 EI
8
3 EI
8
0
0
−3 EI
16
EI
EI
2
3 EI
8
−3 EI
8
0
EI
3 EI
8
−3 EI
8
0
3 EI
8
3 EI
16
−3 EI
16
0
−3 EI
8
−3 EI
16
3 EI
16
0
0
0
0
EA
4
0
0
0
−EA
4
0
K(3) =
0
−3 EI
8
EI
2
3 EI
8
(2)
Kg =
−3 EI
8
0
0
3 EI
8
(4.43)
3 EI
16
0
0
0
0
−EA
4
(4.44)
EA
4
EI
√
2
EI
√
2 2
3 EI
√
16 2
−3√
EI
16 2
3 EI
√
16 2
−3√
EI
16 2
EI
√
2 2
EI
√
2
3 EI
√
16 2
−3√
EI
16 2
3 EI
√
16 2
−3√
EI
16 2
3 EI
√
16 2
3 EI
√
16 2
EA
√
8 2
+
3 EI
√
64 2
−EA
√
8 2
−
3 EI
√
64 2
−EA
√
8 2
+
3 EI
√
64 2
EA
√
8 2
−
3 EI
√
64 2
−3√
EI
16 2
−3√
EI
16 2
−EA
√
8 2
−
3 EI
√
64 2
EA
√
8 2
+
3 EI
√
64 2
EA
√
8 2
−
3 EI
√
64 2
−EA
√
8 2
+
3 EI
√
64 2
3 EI
√
16 2
3 EI
√
16 2
−EA
√
8 2
+
3 EI
√
64 2
EA
√
8 2
−
3 EI
√
64 2
EA
√
8 2
+
3 EI
√
64 2
−EA
√
8 2
−
3 EI
√
64 2
−3√
EI
16 2
−3√
EI
16 2
EA
√
8 2
−
3 EI
√
64 2
−EA
√
8 2
+
3 EI
√
64 2
−EA
√
8 2
−
3 EI
√
64 2
EA
√
8 2
+
3 EI
√
64 2
(4.45)
Os vectores das forças nodais equivalentes nos elementos finitos 1 e 3 são constituı́dos
por termos todos nulos, uma vez que não existem quaisquer cargas de vão aplicadas
nas barras AB e CD. Já no elemento finito 2, tendo em conta a carga transversal
84
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
uniformemente distribuı́da aplicada e usando a equação (4.36) obtém-se:
(2)
Fg =
4.4.5
−20/3
20/3
−10
−10
0
0
(4.46)
Reunião das equações elementares
Utilizando a informação apresentada na tabela de incidências 4.1, é possı́vel escrever
as seguintes definições para cada um dos termos da matriz de rigidez global.
(2)
(1)
k11 = k22 + k11
(2)
(2)
k12 = k12
(2)
k22 = k22 + k11
(2)
k32 = k42 + k31
(2)
k42 = k62 + k51
k21 = k21
k31 = k41
k41 = k61
(2)
k13 = k14
k14 = k16
(2)
(3)
k23 = k24 + k13
(2)
(3)
k24 = k26 + k15
(2)
(3)
k33 = k44 + k33
(2)
(3)
k43 = k64 + k53
(2)
(3)
(2)
(3)
k34 = k46 + k35
(2)
(3)
(2)
(3)
k44 = k66 + k55
(2)
(3)
(4.47)
Substituindo nas igualdades anteriores as definições de cada uma das matrizes de rigidez
elementares é possı́vel obter:
EI
2
K∗ =
−3 EI
8
0
−3 EI
8
EI
2
2 EI
EI +
−3 EI
8
+
EI
√
2
3 EI
√
16 2
3 EI
√
16 2
−3 EI
8
EA
√
8 2
+
+
3 EI
16
−EA
√
8 2
+
0
3 EI
√
16 2
+
3 EI
√
16 2
3 EI
√
64 2
−EA
√
8 2
3 EI
√
64 2
EA
4
+
+
EA
√
8 2
3 EI
√
64 2
+
3 EI
√
64 2
(4.48)
Tendo de novo em conta a tabela de incidências, o vector das forças nodais equivalentes
é construı́do através das igualdades:
(1)
(2)
(2)
(3)
(2)
(3)
(2)
(3)
F1 = F1nodal + F2 + F1
F2 = F2nodal + F2 + F1
F3 = F3nodal + F4 + F3
(4.49)
F4 = F4nodal + F6 + F5
Tendo em conta o vector das forças nodais equivalentes elementares determinados na
4.4. ANÁLISE DE UM PÓRTICO PLANO
secção anterior obtém-se:
F=
85
20
−
3
20
3
−10
(4.50)
0
4.4.6
Resolução da equação de equilı́brio global
Considera-se que todas as barras da estrutura têm uma secção transversal quadrangular com dimensões b = 0.3 m e h = 0.3 m. A resolução da equação de equilı́brio
global permite a determinação dos seguintes valores para cada um dos deslocamentos
independentes da estrutura:
1
F=
E
−7191.02
7676.85
−1778.85
(4.51)
−485.538
4.4.7
Análise da solução obtida
A substituição dos valores obtidos para os deslocamentos independentes nas equações
(4.40), (4.41) e (4.42) permite obter as seguintes aproximações para os campos de
deslocamentos transversais, w(x)
w(x1 ) =
´
1 ³ 2
x1 (−1797.75 + 449.439 x1 )
E
(4.52)
w(x2 ) =
1
(−85.9536 (−4.21703 + x2 ) x2 (19.839 + x2 ))
E
(4.53)
w(x3 ) =
³
´´
1 ³
−222.211 (−0.225175 + x3 ) 32. − 11.3137 x3 + x23
E
(4.54)
e para os campos de deslocamentos longitudinais, u(x).
u(x1 ) = 0
(4.55)
u(x2 ) =
1
(−121.385x2 )
E
(4.56)
u(x3 ) =
1
(914.511 − 161.664x3 )
E
(4.57)
86
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Figura 4.9: Deformada obtida considerando a malha com 3 elementos
A deformada obtida para o pórtico encontra-se representada na figura 4.9.
A consideração das condições de compatibilidade no domı́nio, expressas na equação
(4.4), permite a determinação das aproximações para os campos de curvaturas, χ(x) e
para os campos de extensões axiais, ε(x), para cada um dos elementos da discretização.
Obtém-se
χ(x1 ) =
1
(3595.51 − 2696.63x1 )
E
(4.58)
χ(x2 ) =
1
(2685.52 + 515.721x2 )
E
(4.59)
χ(x3 ) =
1
(−5128.13 + 1333.27x3 )
E
(4.60)
e
ε(x1 ) = 0
(4.61)
ε(x2 ) =
1
(−121.385)
E
(4.62)
ε(x3 ) =
1
(−161.664)
E
(4.63)
A utilização das relações de elasticidade (4.7) permite agora calcular a aproximação
para os campos de momentos flectores e para os campos de esforços normais em cada
uma das barras. Obtém-se:
M (x1 ) = 0.000675(3595.51 − 2696.63x1 ) (kN m)
(4.64)
M (x2 ) = 0.000675(2685.52 + 515.721x2 ) (kN m)
(4.65)
M (x3 ) = 0.000675(−5128.13 + 1333.27x3 ) (kN m)
(4.66)
e
N (x1 ) = 0 (kN )
(4.67)
4.4. ANÁLISE DE UM PÓRTICO PLANO
87
N (x2 ) = −10.9246 (kN )
(4.68)
N (x3 ) = −14.5498 (kN )
(4.69)
Nas figuras 4.10 e 4.11 traçam-se os diagramas de momentos flectores e os diagramas
de esforços normais obtidos com a malha com três elementos finitos.
Figura 4.10: Diagrama de momentos flectores considerando a malha com 3 elementos
[kN m]
Figura 4.11: Diagrama de esforços normais considerando a malha com 3 elementos
[kN ]
A solução para o campo de esforços transversos é determinada a partir da aplicação da
condição de equilı́brio (2.43), a qual permite obter:
V (x1 ) = −1.8202 (kN )
(4.70)
V (x2 ) = 0.3481 (kN )
(4.71)
V (x3 ) = 0.8999 (kN )
(4.72)
Os diagramas de esforços transversos associados a esta solução encontram-se representados na figura 4.12.
88
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Figura 4.12: Diagrama de esforços transversos considerando a malha com 3 elementos
[kN ]
Problema 4.2 Estabeleça quais as condições de equilı́brio a verificar para que a solução
aproximada obtida corresponda à solução exacta para a estrutura analisada.
Problema 4.3 Verifique as condições de equilı́brio no domı́nio e discuta se a solução
obtida pode ser considerada como a solução exacta.
Como não são verificadas localmente as condições de equilı́brio, a solução obtida é apenas aproximada. Para se conseguir uma melhor aproximação, é necessário considerar
uma malha envolvendo a consideração de mais elementos finitos na discretização do
troço BC do pórtico plano em análise. Na figura 4.13 representa-se a deformada exacta
para a estrutura analisada e nas figuras 4.14, 4.15 e 4.16 apresentam-se os diagramas
exactos para os campos de momentos flectores, esforços normais e esforços transversos.
Figura 4.13: Deformada exacta [m]
Problema 4.4 Recupere a solução exacta adicionando uma solução particular, tal
como efectuado na secção 3.3.1.
Problema 4.5 Considere que o apoio existente no nó A é substituı́do por um encastramento deslizante no qual a translacção permitida faz um ângulo α com a direcção
x do referencial global. Sem efectuar os cálculos numéricos, escreva para este caso as
equações que permitem definir a matriz de rigidez da estrutua em função das matrizes
de rigidez elementares.
4.4. ANÁLISE DE UM PÓRTICO PLANO
Figura 4.14: Solução exacta para o diagrama de momentos flectores [kN m]
Figura 4.15: Solução exacta para o diagrama de esforços normais [kN ]
Figura 4.16: Solução exacta para o diagrama de esforços transversos [kN ]
89
90
CAPÍTULO 4. ANÁLISE DE PÓRTICOS PLANOS
Capı́tulo 5
Análise de vigas de Timoshenko
5.1
Considerações iniciais
Neste capı́tulo é efectuada a análise de vigas de Timoshenko com recurso ao método
dos elemento finitos. Recorde-se que nesta teoria para peças lineares se considera o
efeito da deformação por corte.
Na primeira secção é formulado o elemento finito que permite a obtenção de soluções
aproximadas para este tipo de elemento estrutural. Depois de definidas as aproximações
para os campos de deslocamentos na barra, torna-se possı́vel a obtenção da matriz
de rigidez elementar e do vector das forças nodais equivalentes elementares através
da aplicação directa dos procedimentos gerais definidos para o método dos elementos
finitos.
Na segunda secção deste capı́tulo é efectuada a análise de uma barra em consola sujeita
à acção de uma carga transversal concentrada aplicada no nó livre. Obtém-se primeiro
a solução exacta, tarefa facilitada neste caso porque a estrutura é isostática, o que
permite a determinação dos diagramas de esforços através da consideração das equações
de equilı́brio. É depois obtida uma solução considerando uma discretização envolvendo
apenas um elemento finito. Embora nesta estrutura não existam quaisquer cargas de
vão, é possı́vel verificar com facilidade que a solução obtida com aquela malha não
vai corresponder à solução exacta. Depois de efectuada a comparação entre a solução
exacta e a solução aproximada obtida com a malha com um elemento finito, discutese de seguida a melhoria que se consegue obter na modelação quando se consideram
malhas com um número crescente de elementos finitos.
O capı́tulo termina com a discussão de um fenómeno que pode surgir e afectar de forma
significativa a qualidade da solução aproximada obtida. Esse fenómeno é conhecido
como shear locking. É primeiro ilustrado o aparecimento deste tipo de fenómeno.
É discutida depois a razão pela qual tal situação ocorre e quais são as técnicas que
podem ser utilizadas para evitar o seu aparecimento e tornar possı́vel a utilização
91
92
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
de elementos finitos baseados na consideração da teoria de vigas de Timoshenko em
qualquer situação.
5.2
Formulação do elemento finito
Para formular o elemento finito é necessário numa primeira fase definir a aproximação
para os campos de deslocamentos. Para este tipo de elemento estrutural devem definirse duas aproximações independentes, uma para o campo de deslocamentos transversais,
w(x), outra para o campo de rotações, θ(x). Recorde-se que estes dois campos de
deslocamentos são independentes quando se considera a deformação por corte.
Uma vez definida a aproximação para os campos de deslocamentos, é possı́vel determinar a matriz de rigidez elementar e o vector das forças nodais equivalentes aplicando
os procedimentos gerais já considerados nos capı́tulos anteriores.
5.2.1
Definição da aproximação
Como nas equações de compatibilidade surgem apenas primeiras derivadas, para assegurar que na solução aproximada todas as condições de compatibilidade são verificadas
localmente é necessário apenas garantir a continuidade dos campos que são directamente aproximados. Tal não sucede no caso das vigas de Euler-Bernoulli, para as
quais é necessário garantir a continuidade do campo directamente aproximado (campo
de deslocamentos transversais, w(x)) e das suas primeiras derivadas.
Desta forma, a definição das aproximação resulta bastante simplificada no caso de se
adoptar a teoria de vigas de Timoshenko. Como é necessário apenas garantir a continuidade dos campos aproximados, é possı́vel utilizar o mesmo tipo de procedimento que
foi utilizado na definição da aproximação para o campo de deslocamentos longitudinais
na formulação de elementos finitos para a análise de peças lineares sujeitas apenas a
carregamentos axiais.
Para definir a aproximação para o campo de rotações, apenas é necessário conhecer o
valor dessa grandeza num determinado número de pontos de passagem, ou seja, num
determinado número de nós. Para se definir uma aproximação linear, é necessário
conhecer o valor do campo de rotações nos dois nós de extremidade do elemento finito.
Define-se desta forma:
θ(xe ) = Ψ1 (xe ) q1 + Ψ2 (xe ) q2 = (1 −
xe
xe
) q1 + ( ) q2
L
L
(5.1)
A definição da aproximação para o campo de deslocamentos transversais é baseada
exclusivamente no conhecimento do valor que essa grandeza fı́sica toma num determinado número de nós definidos no elemento finito. Para se construir uma aproximação
5.2. FORMULAÇÃO DO ELEMENTO FINITO
93
linear para w(x), é necessário conhecer o valor dos deslocamentos transversais nos nós
de extremidade do elemento finito. Pode escrever-se:
w(xe ) = −Ψ1 (xe ) q1 − Ψ2 (xe ) q3 = (−1 +
x
x
) q1 − ( ) q3
L
L
(5.2)
Na figura 5.1 são identificados os deslocamentos nodais elementares em função dos
quais se escrevem as aproximaçõs para os campos de deslocamentos
Figura 5.1: Deslocamentos nodais elementares para a viga de Timoshenko
O sinal negativo que afecta cada uma das duas funções de aproximação em (5.2) surge
porque os deslocamemtos nodais elementares q3 e q4 correspondem a deslocamentos
transversais com sinal negativo, de acordo com o sentido considerado como positivo
para esta grandeza fı́sica.
As aproximações para os campos de deslocamentos numa viga de Timoshenko podem
ser escritas no formato matricial:
"
θ(x)
w(x)
#
x
1−
L
=
0
x
L
0
0
q
0 1
q2
x
q3
x
−1 +
−
L
L
(5.3)
q4
A matriz das funções de aproximação, Ψ, tem neste caso duas linhas (porque são
definidas aproximações independentes para dois campos de deslocamentos) e quatro
colunas (por que existem quatro deslocamentos nodais elementares). Este operador é
definido por:
x x
0
0
1
−
L L
(5.4)
Ψ=
x
x
0
0 −1 +
−
L
L
Cada uma das colunas da matriz Ψ tem o significado fı́sico habitual. A coluna j
da matriz das funções de aproximação lista os campos de deslocamentos (rotações
na primeira linhas, deslocamentos transversais na segunda) que surgem na viga de
Timoshenko quando se impõe o deslocamento nodal elementar com valor unitário e
se garante que os restantes são nulos, ou seja, quando qj = 1 e qk = 0, para k 6= j.
A deformada que surge no elemento de viga quando se considera uma aproximação
94
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
Figura 5.2: Definição da aproximação dos campos de deslocamentos
linear para os campos de deslocamentos e quando se aplica cada um dos deslocamentos
nodais elementares com valor unitário encontra-se representada na figura 5.2.
Para o elemento de viga de Timoshenko, a matriz B tem duas linhas (porque neste tipo
de elemento estrutural existem dois campos de deformações) e quatro colunas (porque
existem quatro deslocamentos nodais elementares). Tendo em conta as funções de
aproximação determinadas anteriormente, é possı́vel verificar que:
B = AΨ
d
dx
=
1
B
=
(5.5)
x
0 1−
L
d
0
dx
1
−
L
x
1−
L
1
L
x
L
x
L
0
0
0
x
x
−1 +
−
L
L
(5.6)
0
0
1
1
−
L
L
(5.7)
Cada uma das colunas da matriz B tem significado fı́sico bem preciso. Na coluna k
de B listam-se os campos de deformação (curvaturas na primeira linha, deformações
por corte na segunda) que se desenvolvem no elemento de viga quando se impõe o
deslocamento nodal qk com valor unitário e se garante que os restantes são nulos.
Para que exista um campo de curvaturas não nulo, é necessário que o campo de rotações
ao longo da barra varie. Isto acontece apenas quando se consideram aplicados os deslocamentos nodais elementares q1 e q2 . Quando se impõem os deslocamentos transversais
elementares q3 e q4 , apenas varia o campo de deslocamentos transversais (neste caso o
campo de rotações é nulo). As deformadas correspondentes estão associadas a campos
de curvaturas nulas.
5.2. FORMULAÇÃO DO ELEMENTO FINITO
95
Para que exista um campo de deformações por corte, basta que seja diferente de zero
o campo de rotações ou que seja variável o campo de deslocamentos transversais. Este
facto faz com que sejam não-nulos os campos de deformações por corte associados a
todas as deformadas reprentadas na figura 5.2.
A aproximação para os campos de deformações pode ser expresso matricialmente na
forma:
1
1
q1
"
#
−
0
0
q
χ(x)
L
L
2
(5.8)
=
γ(x)
x x 1
1 q3
1−
−
q4
L L L
L
A aplicação das relações de elasticidade apresentadas na equação (2.25) permite agora
definir a aproximação para os campos de esforços em cada um dos elementos de viga
de Timoshenko. Sublinhe-se que o cálculo dos esforços transversos passa agora pela
utilização da relação constitutiva correspondente.
"
M (x)
V (x)
#
1
−
0
EI
L
=
x
0 GAc
1−
L
1
L
x
L
q
0 1
q2
1
1 q3
−
q4
L
L
0
(5.9)
Problema 5.1 Construa um elemento de viga de Timoshenko que permita definir uma
aproximação quadrática para o campo de rotações e para o campo de deslocamentos
transversais.
Problema 5.2 Construa um elemento de viga de Timoshenko que permita definir uma
aproximação linear para o campo de rotações e uma aproximação quadrática para o
campo de deslocamentos transversais.
5.2.2
Matriz de rigidez elementar
A aplicação da definição (3.26) permite definir a matriz de rigidez elementar para as
vigas de Timoshenko. Tendo em conta a matriz B definida em (5.7) e o operador de
elasticidade apresentado em (2.26) obtém-se:
Z L
K(e) =
0
x
1
1−
−
L
L
x
1
L
L
1
0
L
1
0
−
L
EI
0
1
−
0
L
x
GAc
1−
L
1
L
x
L
0
0
dx
1
1
−
L
L
(5.10)
96
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
O desenvolvimento da equação anterior permite determinar a seguinte expressão para
a matriz de rigidez elementar
EI
GAc
+L
L
3
EI
GAc
−
+
L
L
6
K(e) =
GAc
2
GAc
−
2
EI
GAc
−
+L
L
6
GAc
2
GAc
−
2
EI
GAc
+L
L
3
GAc
2
GAc
−
2
GAc
2
GAc
L
−
GAc
2
−
GAc
L
GAc
−
L
GAc
(5.11)
L
Cada uma das colunas da matriz de rigidez elementar volta a ter o significado fı́sico
habitual. Na coluna j da matriz K(e) encontram-se listadas as forças nodais equivalentes que se desenvolvem quando se impõe qj = 1 e se garante que todos os restantes
deslocamentos nodais elementares são nulos, qk = 0 com k 6= j. A identificação do
significado fı́sico de cada uma das colunas da matriz de rigidez elementar pode ser
encontrada na figura 5.3.
Figura 5.3: Identificação do significado fı́sico das colunas da matriz de rigidez elementar
Tendo em conta a sua constituição, o operador de elasticidade (2.26) pode ser decomposto em duas parcelas, a primeira relacionada com o comportamento à flexão
do elemento de viga, a segunda relacionada com o comportamento ao corte. Esta
decomposição, a qual pode ser expressa no formato,
D = Df + Dc
(5.12)
5.2. FORMULAÇÃO DO ELEMENTO FINITO
EI
0
0
GAc
=
EI 0
0
0
97
+
0
0
(5.13)
0 GAc
vai ser importante para a discussão que se desenvolve na última secção deste capı́tulo.
A parcela de flexão do operador elástico vai ser denotado por Df , enquanto que a
correspondente parcela de corte vai ser representada por Dc .
A decomposição considerada para o operador elástico permite decompor por sua vez a
(e)
matriz de rigidez elementar em duas parcelas: a parcela de flexão, Kf , e a parcela de
corte, K(e)
c . Pode escrever-se:
(e)
K
(e)
K
=
(e)
Kf
+
K(e)
c
=
=
Z L
0
Z L
0
Bt (Df + Dc ) B dx
t
B Df B dx +
Z L
0
(5.14)
Bt Df B dx
(5.15)
A parcela de flexão é definida por:
x
1
−L 1 − L
1
x
1
−
Z L
0
EI
L
L
(e)
L
Kf =
1
x
0
0 0
0
1−
L
L
1
−
0
L
Efectuando as integrações definidas em (5.16) obtém-se
EI
L
EI
−
(e)
L
Kf =
0
0
−
EI
L
EI
L
0
0
1
L
x
L
0
0
dx
1
1
−
L
L
(5.16)
0 0
0 0
0 0
(5.17)
0 0
A definição da parcela de corte da matriz de rigidez elementar tem em conta que:
Z L
K(e)
c =
0
x
1
1−
−
L
L
x
1
L
L
1
0
L
1
0
−
L
1
−
0
0
L
x
0 GAc
1−
L
1
L
x
L
0
0
dx
1
1
−
L
L
(5.18)
98
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
Efectuando todas as integrações definidas em (5.18) obtém-se:
GAc
GAc
L
L
3
6
GAc
2
GAc
−
2
GAc
L
3
GAc
2
GAc
−
2
GAc
2
GAc
L
GAc
L
6
K(e)
c =
GAc
2
GAc
GAc
−
L
GAc
(5.19)
GAc
GAc
−
2
2
L
L
Verifica-se agora com facilidade que a matriz de rigidez elementar, já definida em (5.11),
é recuperada se se somarem as parcelas de flexão e de corte, definidas respectivamente
pelas igualdades (5.17) e (5.19).
−
EI
L
EI
−
L
K(e) =
0
0
−
EI
L
EI
L
0 0
0
0
0
0
0
−
GAc
GAc
L
L
3
6
GAc
2
GAc
−
2
GAc
L
3
GAc
2
GAc
−
2
GAc
2
GAc
L
GAc
L
0
6
+
GAc
0
2
GAc
0
−
2
−
GAc
2
−
GAc
L
GAc
−
L
GAc
(5.20)
L
Problema 5.3 Construa a matriz de rigidez elementar para o elemento finito obtido
na resolução do Problema 5.1.
Problema 5.4 Construa a matriz de rigidez elementar para o elemento finito obtido
na resolução do Problema 5.2.
5.2.3
Vector das forças nodais equivalentes elementares
A aplicação da equação genérica (3.29) permite determinar o vector das forças nodais
equivalentes elementares. Tendo em conta a existência de momentos e cargas transversais distribuı́das, é possı́vel obter:
x
x
)
m(x)
0
1
−
(1
−
L
L
x
x
"
#
0
m(x)
Z L
Z L
L
L
m(x) dx =
dx
F(e) =
(5.21)
x p(x)
x
0
0
0
−1 +
(−1 + ) p(x)
L
L
x
x
−
− p(x)
0
L
L
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
99
A equação (5.21) permite verificar que a transformação de cargas de vão em forças
nodais equivalentes é efectuada com base na consideração de um conjunto de equações
similar ao que foi considerado no caso da determinação dos vectores das forças nodais
equivalente para o elemento de barra sujeito a carregamente axial. Ao contrário do que
sucede no caso dos elementos de viga de Euler-Bernoulli, só existem momentos nodais
equivalentes, F1 e F2 , se existir um momento distribuı́do aplicado no vão do elemento
considerado. Considerando carregamentos trapezoidais, é possı́vel verificar que:
2 m1 + m2
m + 2m
1
2
L
(e)
F =
6 2 p1 + p2
(5.22)
p1 + 2 p2
onde m1 {p1 } e m2 {p2 } correspondem aos valores que o momento distribuı́do{carga
transversal distribuı́da}, m(x){p(x)}, toma em cada uma das extremidades da viga.
Problema 5.5 Construa o vector das forças nodais equivalentes quando se considera
a acção de uma carga sinusoidal de equação p(x) = sen(πx/L).
5.3
Análise de uma viga em consola
Para ilustrar a aplicação do método dos elementos finitos na resolução de uma viga de
Timoshenko, efectua-se nesta secção a análise da consola apresentada na figura 5.4.
Figura 5.4: Viga em consola
Para permitir avaliar a qualidade da solução obtida com o recurso ao método dos
elementos finitos, determina-se primeiro a solução exacta para o problema. O cálculo
analı́tico desta solução vem neste caso facilitado pelo facto de se tratar de uma estrutura
estaticamente determinada (estrutura isostática). Este facto possibilita a obtenção dos
campos de esforços através da utilização directa das condições de equilı́brio.
Depois da solução exacta, é obtida uma solução aproximada utilizando uma modelação
baseada na consideração de uma malha constituı́da apenas por um elemento finito.
Depois de comparar a solução aproximada obtida com a solução exacta, ilustra-se a
100
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
convergência das soluções quando se consideram malhas constituı́das por um número
crescente de elementos.
5.3.1
Determinação da solução exacta
Sendo a estrutura em análise isostática, é possı́vel determinar os campos de esforços
através da utilização das condições de equilı́brio no domı́nio e na fronteira. É possı́vel
verificar que:
M (x) = 10(x − 4) [kN m]
(5.23)
V (x) = 10 [kN ]
(5.24)
A aplicação das relações de elasticidade permite a obtenção da solução exacta para os
campos de deformações. Tem-se
χ(x) =
10
M (x)
=
(x − 4)
EI
EI
(5.25)
γ(x) =
V (x)
10
=
GAc
GAc
(5.26)
Para o cálculo do campo de rotações é necessário integrar a equação de compatibilidade
(2.9). Vem:
dθ(x)
dx
(5.27)
10
dθ(x)
(x − 4) =
EI
dx
(5.28)
χ(x) =
A integração da equação anterior permite obter
θ(x) =
10 2
40
x −
x + C1
2EI
EI
(5.29)
Para determinar a constante de integração C1 , é necessário ter em conta uma das
condições de apoio, que estabelece que θ(x = 0) = 0. A substituição desta condição na
expressão obtida para o campo de rotações permite determinar:
θ(0) = 0 ⇒
40
10 2
0 −
0 + C1 = 0 ⇒ C1 = 0
2EI
EI
(5.30)
O campo de rotações exacto vem dado por:
θ(x) =
40
5 2
x −
x
EI
EI
(5.31)
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
101
O cálculo do campo de deslocamentos transversais é determinado tendo em conta a
condição de compatibilidade (2.10)
γ(x) = θ(x) +
d w(x)
dx
10
5 2
40
d w(x)
=
x −
x+
GAc
EI
EI
dx
10
5 2
40
d w(x)
=
−
x +
x
dx
GAc EI
EI
(5.32)
(5.33)
(5.34)
A integração da equação anterior permite obter:
w(x) =
10
40 2
5 3
x+
x −
x + C2
GAc
2EI
3EI
(5.35)
A segunda das condições de apoio, a qual estabelece que w(x = 0) = 0, vai permitir
identificar o valor da constante de integração C2 . Obtém-se:
w(0) = 0 ⇒
10
40 2
5 3
0+
0 −
0 + C2 = 0 ⇒ C2 = 0
GAc
2EI
3EI
(5.36)
O campo de deslocamentos transversais exacto vem dado por:
w(x) =
10
40 2
5 3
x+
x −
x
GAc
2EI
3EI
(5.37)
As soluções exactas para os campo de deslocamentos transversais, w(x), e para o campo
de rotações, θ(x), encontram-se apresentadas nas equações (5.37) e (5.31), respectivamente. As equações (5.23) e (5.24) definem as soluções exactas para os campos de
esforços, momentos flectores e esforços transversos, respectivamente.
5.3.2
Resolução aproximada utilizando o método dos elementos finitos
Aplica-se agora o método dos elementos finitos na análise da estrutura representada na
figura 5.4. A solução aproximada obtida desta forma vai ser comparada com a solução
exacta calculada na secção anterior.
Discretização da estrutura
Para a análise da consola representada na figura 5.4 considera-se a malha de elementos finitos apresentada na figura 5.5, a qual considera apenas um elemento finito no
102
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
Figura 5.5: Discretização para a análise da viga em consola
qual se definem aproximações lineares para o campo de rotações e para o campo de
deslocamentos transversais.
Como a aproximação definida para os campos de deslocamentos é linear e como a
solução exacta é de grau superior (quadrática para o campo de rotações e cúbica para
o campo de deslocamentos transversais), a solução a obter pela aplicação do método
dos elementos finitos será apenas aproximada, mesmo existindo apenas cargas aplicadas
nos nós.
Como a aproximação definida não contém a solução exacta para o problema na ausência
de cargas de vão, será ainda possı́vel verificar que os deslocamentos independentes
também não vão corresponder aos valores exactos.
Identificação dos deslocamentos independentes
Na figura 5.6 identificam-se os deslocamentos independentes a considerar na análise.
Existindo dois deslocamentos independentes, conclui-se que a equação de equilı́brio
global vai corresponder a um sistema de duas equações a duas incógnitas.
Figura 5.6: Identificação dos deslocamentos independentes
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
103
Definição da aproximação do campo de deslocamentos
Para a definição da aproximação e para o processo de reunião das equações elementares
vai ser necessário definir a tabela de incidências.
Elemento q1
1
−
q2
q3
q4
d1
−
d2
Tabela 5.1: Tabela de incidências para a consola (1 elemento)
Tendo em conta (5.1), a aproximação para o campo de rotações é dada por:
θ(x1 ) = (1 − x1 /4)q1 + (x1 /4)q2
(5.38)
θ(x1 ) = (x1 /4)d1
(5.39)
A aproximação para o campo de deslocamentos transversais é dada por:
w(x1 ) = −(1 − x1 /4)q3 − (x1 /4)q4
(5.40)
w(x1 ) = −(x1 /4)d2
(5.41)
A aplicação das condições de compatibilidade no domı́nio permite a determinação da
aproximação para os campos de deformações. Vem:
χ(x1 ) =
dθ(x1 )
= (1/4)d1
dx1
γ(x1 ) = θ(x1 ) +
dw(x1 )
= (x1 /4)d1 − (1/4)d2
dx1
(5.42)
(5.43)
A aproximação para os campos de esforços é determinada através da aplicação das
relações de elasticidade. Obtem-se:
M (x) = EIχ(x1 ) = EI(1/4)d1
(5.44)
V (x) = GAc γ(x1 ) = GAc (x1 /4)d1 − GAc (1/4)d2
(5.45)
Dado que o campo de momentos flectores depende apenas do campo de curvaturas e
como neste elemento com aproximação linear para o campo de rotações o campo de
curvaturas é constante, a aproximação definida para este campo de esforços também
é constante no domı́nio de cada elemento finito. O campo de esforços transversos é
determinado por sua vez directamente a partir do conhecimento do campo deformações
de corte. Como este campo de deformações resulta da soma do campo de rotações
104
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
com a derivada do campo de deslocamentos transversais, conclui-se que no elemento
finito adoptado a deformação por corte varia linearmente. Este facto faz com que a
variação do campo de esforços transversos na solução aproximada seja também linear.
Isto permite antever desde já um problema na verificação das condições de equilı́brio no
domı́nio: se o campo de momentos flectores é constante, o campo de esforços transversos
deveria ser sempre nulo, por forma a satisfazer a condição de equilı́brio correspondente.
Definição das equações elementares
Tendo em conta (5.11), a matriz de rigidez elementar é dada por:
GAc
EI
+4
4
3
GAc
2
GAc
−
2
EI
GAc
+4
4
3
GAc
2
GAc
−
2
GAc
2
GAc
4
EI
GAc
−
+
4
4
6
K(1) =
GAc
2
GAc
−
EI
GAc
−
+4
4
6
−
2
GAc
2
−
GAc
4
GAc
−
4
GAc
(5.46)
4
Como não existem quaisquer cargas de vão aplicadas, o vector das forças nodais equivalentes no elemento 1 é nulo.
Reunião das equações elementares
Tendo em conta o conteúdo da tabela de incidências 5.1, é possı́vel escrever:
(1)
k12 = k24
(1)
k22 = k44
k11 = k22
k21 = k42
(1)
(5.47)
(1)
A matriz de rigidez da estrutura vem dada por:
4GAc
EI 4GAc
+
−
3
2
4
K∗ = EI
4GAc
4GAc
−
2
4
(5.48)
A informação contida na tabela de incidências 5.1 vai permitir identificar os termos do
vector das forças nodais equivalentes globais. É possı́vel verificar que:
(nodal)
+ F2
(nodal)
+ F4
F1 = F1
F2 = F2
(1)
(5.49)
(1)
(5.50)
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
Substituindo valores, obtém-se:
F=
0
105
(5.51)
−10
Resolução da equação do MEF
Resolvendo a equação do método dos elementos finitos obtém-se:
"
d=
d1
d2
#
=
−240
1
µ
¶
3EI + 4GAc −40 3EI + 16GAc
GAc
(5.52)
Considerando-se agora uma secção transversal com dimensões b = 0.3m e h = 0.8m e
assumindo ν = 0.25 vem:
EI = E
bh3
0.3 × 0.83
=E
12
12
GAc = Gκbh = E
(5.53)
1
5
1
5
× × bh = E
× × 0.3 × 0.8 (5.54)
2(1 + ν) 6
2(1 + 0.25) 6
Substituindo estas igualdades na solução (5.52), obtém-se o seguinte valor para os
deslocamentos independentes da estrutura:
"
d1
d2
#
−669.6
1
=
E −1839.3
(5.55)
Análise da solução obtida
A solução aproximada para os campos de deslocamentos é obtida se se substituirem os
deslocamentos independentes nas equações (5.39) e (5.41). Obtem-se:
1
θ(x1 ) = − (167.4x1 )
E
1
(459.825x1 )
w(x1 ) =
E
(5.56)
(5.57)
Na figura 5.7 representa-se o campo de deslocamentos transversais aproximado obtido
e o campo de deslocamentos transversais exacto. É imediato verificar que é fraca a qualidade da solução obtida. Verifica-se ainda que o deslocamento transversal no nó final
da consola (deslocamento independente d2 ) não corresponde ao deslocamento exacto.
A análise da mesma figura permite ainda verificar que esse valor aproximado é, em
valor absoluto, inferior ao que corresponde à solução exacta. Esta é uma caracterı́stica
106
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
geral das soluções obtidas com recurso ao MEF: os deslocamentos nodais são inferiores
aos deslocamentos exactos. Isto acontece porque o modelo de elementos finitos é mais
rı́gido que o comportamento real da estrutura (basta verificar que em cada elemento se
restringe o grau do campo de deformações, o que desde logo condiciona a forma como
o modelo permite que a peça altere a sua geometria inicial.
O mesmo tipo de comentário pode ser desenvolvido a propósito do campo de rotações.
Na figura 5.7 também se efectua a comparação da solução aproximada obtida para θ(x)
e o correspondente diagrama exacto.
0
0
w
2000
Θ
−1000
Solução aproximada (1 ele)
4000
−2000
Solução aproximada (1 ele)
6000
−3000
8000
10000
−4000
12000
Solução exacta
−5000
14000
Solução exacta
−6000
16000
18000
0
0.5
1
1.5
2
2.5
3
3.5
4
−7000
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 5.7: Campos de deslocamentos transversais e rotações na consola (modelação
com 1 elemento finito)
A aplicação das condições de compatibilidade permite obter as seguintes equações para
os campos de deformações aproximadas:
1
χ(x1 ) = − (167.4)
E
1
γ(x1 ) =
(459.825 − 167.4x1 )
E
(5.58)
(5.59)
Finalmente, define-se a aproximação para os campos de esforços através das seguintes
igualdades:
M (x1 ) = −2.14272 (kN m)
(5.60)
V (x1 ) = 36.786 − 13.392x1 (kN )
(5.61)
Na figura 5.8 representam-se os diagramas de momentos flectores e esforços transversos
obtidos com a discretização envolvendo apenas um elemento finito. Estes diagramas
são comparados com as soluções exactas para cada uma daquelas grandezas. Verificase com facilidade que os campos de esforços obtidos estão ainda longe de recuperar a
solução exacta para o problema.
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
107
40
V
−40
M
−35
30
Solução aproximada (1 ele)
Solução exacta
−30
20
−25
10
−20
−15
0
Solução aproximada (1 ele)
−10
Solução exacta
−10
−5
0
−20
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 5.8: Campos de momentos flectores e esforços transversos (modelação com 1
elemento finito)
O diagrama de momentos flectores aproximado toma uma valor constante. Não permite
a verificação da condição de fronteira estática na secção final da barra, uma vez que
M (x1 = 4) = −2.14 kN m, em vez de satisfazer a condição de equilı́brio M (x1 = 4) =
0 kN m. O diagrama de esforços transversos também não permite verificar a segunda
das condições de fronteira estática. Em vez de satisfazer V (x1 = 4) = 10 kN , na
solução aproximada obtida tem-se V (x1 = 4) = −16.78 kN .
O equilı́brio no domı́nio também não é verificado localmente. Para confirmar esta
afirmação basta verificar que o campo de esforços transversos não corresponde à derivada do campo de momentos flectores ao longo do eixo do elemento de viga.
5.3.3
Refinamento da solução obtida
Interessa agora verificar como a solução aproximada melhora e converge para a solução
exacta à medida que se consideram malhas com um número crescente de elementos
finitos.
Na figura 5.9 compara-se a solução exacta para o campo de deslocamentos transversais
com a solução aproximada obtida com malhas uniformes constituı́das por um, quatro,
dez, vinte, quarenta e cem elementos finitos. A análise desta figura permite recordar
algumas das caracterı́sticas genéricas das soluções aproximadas obtidas com o método
dos elementos finitos. Verifica-se em primeiro lugar que as soluções obtidas satisfazem todas as condições de compatibilidade: o campo de deslocamentos transversais
é contı́nuo no domı́nio de cada elemento, é contı́nuo entre elementos e satisfaz todas
as condições de apoio (condições de fronteira cinemática). Os deslocamentos nodais
são mais pequenos que os correspondentes deslocamentos exactos. À medida que a
malha é refinada, estes deslocamentos tendem para os valores exactos, mas sempre por
valores inferiores aos exactos. Finalmente, é possı́vel verificar que a convergência para
108
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
0
0
W
w
Solução aproximada (1 ele)
4000
4000
6000
6000
8000
8000
10000
10000
12000
12000
Solução exacta
14000
14000
16000
16000
18000
18000
0
0.5
1
1.5
2
2.5
3
3.5
4
Solução exacta
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0
w
w
2000
2000
Solução aproximada (10 ele)
4000
4000
6000
6000
8000
8000
10000
10000
12000
14000
16000
16000
0
0.5
1
1.5
2
Solução aproximada (20 ele)
12000
Solução exacta
14000
18000
Solução aproximada (4 ele)
2000
2000
2.5
3
3.5
4
18000
Solução exacta
0
0.5
1
1.5
2
2.5
3
3.5
4
2.5
3
3.5
4
0
0
w
w
2000
2000
Solução aproximada (40 ele)
4000
4000
6000
6000
8000
8000
10000
10000
12000
12000
14000
14000
16000
16000
Solução aproximada (100 ele)
18000
0
0.5
1
1.5
2
2.5
3
3.5
4
18000
0
0.5
1
1.5
2
Figura 5.9: Refinamento do campo de deslocamentos transversais
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
109
a solução exacta quando se analisam os campos de deslocamentos é rápida. Isto que
dizer que se consegue obter uma boa solução para o campo de deslocamentos com um
número de elementos relativamente reduzido. A análise dos gráficos apresentados na
figura 5.9 permitem verificar que a solução obtida com uma discretização envolvendo
20 elementos finitos conduz a uma solução praticamente coincidente com a solução
exacta. Quando a malha envolve a consideração 40 elementos as duas soluções são
coincidentes, embora na solução aproximada o campo de deslocamentos continue a ser
linear em cada um dos elementos da discretização.
Na figura 5.10 apresenta-se a solução que se obtém para o campo de rotações quando
se consideram as mesmas malhas que foram utilizadas na obtenção das soluções aproximadas para os campos de deslocamentos transversais representados na figura 5.9.
Os comentários que foram efectuados com base na análise dos campos de deslocamentos transversais podem agora ser repetidos a propósito da análise da convergência do
campo de rotações.
As soluções aproximadas para o campo de momentos flectores quando se consideram
as diferentes malhas de elementos finitos em teste encontram-se representadas na figura 5.11. Também a análise destes diagramas permite recordar algumas das caracterı́sticas gerais das soluções obtidas com recurso ao método dos elementos finitos. Os
campos de esforços não satisfazem localmente as condições de equilı́brio (no domı́nio,
na fronteira estática e na fronteira entre elementos adjacentes), pelo que, de acordo
com os teoremas da análise plástica limite, definem soluções aproximadas contra a segurança. Para verificar este facto basta ter em conta que os esforços máximos definidos
em cada uma das soluções aproximadas são inferiores aos esforços máximos que na
realidade estão instalados na estrutura em análise. A análise dos diagramas apresentados na figura 5.11 permite ainda observar que a convergência no caso das grandezas
estáticas é mais lenta que no caso das grandezas cinemáticas (deslocamentos transversais e rotações). Isto faz com que seja necessário considerar discretizações envolvendo
um número de elementos finitos maior para assegurar um grau de precisão elevado.
Na malha com 40 elementos finitos a solução obtida para o campo de momentos flectores ainda está longe de poder ser confundida com a solução exacta. Mesmo com a
malha constituı́da por 100 elementos finitos são perceptı́veis os saltos existentes entre
os valores constantes obtidos para o momento flector em cada um dos elementos da
discretização.
Na figura 5.12 apresenta-se a evolução para o diagrama de esforços transversos. À
medida que a malha é refinada, os diagramas aproximados vão ficando cada vez mais
estranhos. Os valores extremos que definem a variação linear deste esforço em cada um
dos elementos da malha vão sendo cada vez maiores à medida que se refina a malha. No
entanto, é possı́vel verificar que o valor exacto para o campo de esforços é recuperado
na secção de meio-vão de cada um dos elementos de viga. Este aspecto é bem visı́vel
na figura 5.13, na qual se representa, para cada uma das malhas testadas, o diagrama
que é construı́do unindo o valor que o campo de esforços toma no ponto médio de cada
elemento finito considerado.
110
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
0
0
Θ
−1000
Θ
−1000
Solução aproximada (4 ele)
−2000
−2000
Solução aproximada (1 ele)
−3000
−3000
−4000
−4000
−5000
−5000
Solução exacta
−7000
Solução exacta
−6000
−6000
0
0.5
1
1.5
2
2.5
3
3.5
4
−7000
0
0.5
1
1.5
2
2.5
3
3.5
4
3
3.5
4
3
3.5
4
0
0
Θ
−1000
Θ
−1000
−2000
−2000
Solução aproximada (20 ele)
Solução aproximada (10 ele)
−3000
−3000
−4000
−4000
−5000
−5000
Solução exacta
−6000
−7000
−6000
−7000
0
0.5
1
1.5
2
2.5
3
3.5
4
Solução exacta
0
0.5
1
1.5
2
2.5
0
0
Θ
Θ
−1000
−1000
−2000
−2000
Solução aproximada (40 ele)
−3000
−3000
−4000
−4000
−5000
−5000
−6000
−6000
−7000
−7000
0
0.5
1
1.5
2
2.5
3
Solução aproximada (100 ele)
3.5
4
0
0.5
1
1.5
Figura 5.10: Refinamento do campo de rotações
2
2.5
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
−40
111
−40
M
M
−35
−35
Solução exacta
Solução exacta
−30
−30
−25
−25
−20
−20
−15
−15
Solução aproximada (1 ele)
−10
−10
Solução aproximada (4 ele)
−5
−5
0
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0
0.5
1
1.5
2
2.5
3
3.5
4
2
2.5
3
3.5
4
2
2.5
3
3.5
4
−40
−40
M
−35
−35
M
Solução exacta
Solução exacta
−30
−30
−25
−25
−20
−20
−15
−15
Solução aproximada (20 ele)
−10
Solução aproximada (10 ele)
−10
−5
−5
0
0
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
−40
−40
M
−35
M
−35
−30
−30
−25
−25
−20
−20
Solução aproximada (100 ele)
−15
−15
Solução aproximada (40 ele)
−10
−10
−5
−5
0
0
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
Figura 5.11: Refinamento do diagrama de momentos flectores
112
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
40
V
100
V
80
30
Solução aproximada (4 ele)
Solução aproximada (1 ele)
60
20
40
20
10
0
0
−20
Solução exacta
−40
−10
Solução exacta
−60
−20
0
0.5
1
1.5
2
2.5
3
3.5
4
−80
0
0.5
1
1.5
2
2.5
3
3.5
4
3.5
4
3.5
4
35
V
60
V
30
Solução aproximada (20 ele)
50
Solução execta
25
40
20
30
15
20
10
10
5
0
0
−10
−5
−20
Solução aproximada (10 ele)
−10
−30
−40
−15
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
3
15
25
V
V
14
Solução aproximada (40 ele)
13
20
12
15
11
10
10
9
5
8
7
0
Solução aproximada (100 ele)
6
−5
5
0
0.5
1
1.5
2
2.5
3
3.5
4
0
0.5
1
1.5
2
2.5
Figura 5.12: Refinamento do diagrama de esforços transversos
3
5.3. ANÁLISE DE UMA VIGA EM CONSOLA
113
11
11
V
10.8
10.8
10.6
10.6
Solução aproximada (4 ele)
10.4
10.4
10.2
10.2
10
10
9.8
9.8
9.6
9.6
9.4
9.4
9.2
9.2
9
0
0.5
1
1.5
2
2.5
3
3.5
4
9
(10 elementos)
0
0.5
1
1.5
2
2.5
3
3.5
4
2
2.5
3
3.5
4
11
11
V
V
10.8
10.8
10.6
10.6
20 elementos
10.4
10.2
10
10
9.8
9.8
9.6
9.6
9.4
9.4
9.2
9.2
9
40 elementos
10.4
10.2
0
0.5
1
1.5
2
2.5
3
3.5
4
9
0
0.5
1
1.5
Figura 5.13: Diagrama de esforços transversos corrigido
114
5.4
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
Efeito de Shear Locking
Nesta secção discute-se um fenómeno que pode surgir quando se aplica o método dos
elementos finitos na análise de vigas de Timoshenko com secções transversais de altura
reduzida. Este fenómeno, designado usualmente por shear locking, pode destruir por
completo a solução aproximada, conduzindo à obtenção de resultados sem qualquer
significado.
Felizmente, existem procedimentos que permitem assegurar que este fenómeno não
surge na análise e que a utilização do método dos elementos finitos em conjunto com a
teoria de vigas de Timoshenko permite obter sempre uma boa solução para a estrutura
em estudo, desde que a malha seja suficientemente refinada.
Antes de se apresentar a técnica que permite limitar o aparecimento do fenómeno de
shear loking, é importante perceber as razões pelas quais este problema pode surgir e
quais os sintomas que permitem identificar o seu aparecimento.
5.4.1
O que é?
A teoria de vigas de Timoshenko permite considerar o efeito da deformação por corte.
Tal como se vai ilustrar nesta secção, o efeito da deformação por corte é importante
quando a relação entre o comprimento da barra, L, e a altura da secção transversal, h
assume valores baixos. Para valores do coeficiente L/h altos, a influência da deformação
por corte é desprezável. A teoria de vigas de Timoshenko é coerente porque permite
recuperar nestes casos os resultados que se teriam caso se aplicasse directamente a
teoria de vigas de Euler-Bernoulli.
A teoria de vigas de Timoshenko é desta forma adequada para a análise de todo o tipo
de situações. Quando o coeficiente L/h é pequena, a deformação por corte assume
relevância e essa é a teoria de viga que deve ser considerada na análise. Quando se
consideram peças com menor altura, a teoria de Timoshenko permite que o efeito da
deformação por corte se anule e conduz a uma solução idêntica à que a teoria de vigas
finas permite obter.
Para ilustrar este comportamento, considere-se de novo a consola analisada na secção 5.3.
Recorde-se que o campo de rotações e o campo de deslocamentos transversais exactos
são dados pelas igualdades:
θe (x) =
40
5 2
x −
x
EI
EI
(5.62)
we (x) =
10
40 2
5 3
x+
x −
x
GAc
2EI
3EI
(5.63)
Se a mesma estrutura for analisada considerando a teoria de vigas de Euler-Bernoulli,
é possı́vel verificar que o campo de deslocamentos transversal e o campo de rotações
5.4. EFEITO DE SHEAR LOCKING
115
passam a ser dados por:
θf (x) =
5 2
40
x −
x
EI
EI
(5.64)
wf (x) =
40 2
5 3
x −
x
2EI
3EI
(5.65)
Determine-se agora o valor do quociente entre a rotação calculada para o nó livre da
consola quando se considera a teoria de vigas espessas (Timoshenko) e a teoria de vigas
finas (Euler-Bernoulli). Este quociente é dado por:
5 2
4 −
θe
= EI
5 2
θf
4 −
EI
40
4
EI = 1
40
4
EI
(5.66)
A equação (5.66) permite verificar que nesta estrutura e para o valor da rotação no
nó livre as duas teorias fornecem sempre o mesmo valor. A deformação por corte não
influencia neste caso o valor da rotação na extremidade da consola.
Se se determinar o quociente entre o valor obtido para o deslocamento transversal na
extremidade da consola quando se consideram as duas teorias, obtém-se:
10
40 2
5 3
4+
4 −
4
we
GAc
2EI
3EI
=
40 2
5 3
wf
4 −
4
2EI
3EI
(5.67)
Simplificando a equação (5.67), tendo em conta a definição para a rigidez de flexão,
EI, e a rigidez de corte, GAc e ainda assumindo para o coeficiente de Poisson um valor
de ν = 0.25, é possı́vel obter:
we
h
= 1 + 0.75( )2
(5.68)
wf
4
A equação (5.68) permite verificar que a deformação por corte tem influência no valor
calculado para o valor do deslocamento transversal na extremidade da consola. Para
valores grandes de h, a teoria de Timoshenko fornece a resposta correcta, e o valor
do deslocamento transversal é maior do que o que seria obtido caso se considerasse a
aplicação da teoria de vigas de Euler-Bernoulli. No entanto, à medida que a altura da
secção transversal diminui, o efeito da deformação por corte diminui e as duas teorias
tendem a fornecer o mesmo valor.
A variação do valor dos quocientes apresentados nas equações (5.68) e (5.66) em função
do parâmetro L/h encontra-se representado na figura 5.14. A equação (5.68) e o
gráfico correspondente permitem verificar que para vigas com secções transversais com
dimensão corrente em engenharia civil a deformação por corte é pouco importante.
116
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
No caso em estudo, verifica-se que para uma viga com h/L = 1/4 (viga com altura
h = 1 m, situação pouco frequente se se tiver em conta o vão da barra), se obtém
we /wf = 1.046. Se a viga tiver uma secção transversal com altura h = 0.5 m, o mesmo
coeficiente passa a valer we /wf = 1.012.
1.8
1.1
1.08
θe / θ f
we/wf
1.7
1.06
1.6
1.04
1.5
1.02
1.4
1
1.3
0.98
1.2
0.96
1.1
0.94
1
0.92
0.9
0
10
L/h
1
10
2
10
3
10
4
10
L/h
5
10
0.9
0
10
1
10
2
10
3
10
4
10
5
10
Figura 5.14: Evolução dos deslocamentos transversais e rotações na extremidade da
consola
Seria de esperar que os modelos de elementos finitos permitissem manter esta coerência
da teoria de Timoshenko. Quando se utilizam na análise de peças espessas devem
permitir recuperar o efeito da deformação por corte. Caso esses modelos de elementos
finitos sejam aplicados na análise de estruturas constituı́das por peças finas, devem
recuperar a solução que os modelos baseados na teoria de vigas de Euler-Bernoulli
permitem recuperar.
Para averiguar se esse é o comportamento dos modelos de elementos finitos baseados na
teoria de Timoshenko, considere-se de novo a consola representada na secção 5.3. Para
assegurar a qualidade dos resultados aproximados obtidos, considera-se uma discretização envolvendo uma malha com cem elementos finitos. Na figura 5.15 apresentamse os campos de deslocamentos transversais para vários valores do quociente L/h. A
solução obtida é comparada com o resultado calculado com base na utilização da teoria
de vigas de Euler-Bernoulli.
Como seria de esperar, para valores de L/h pequenos as duas soluções diferem. Este
facto é perfeitamente natural porque nestes casos a deformação por corte é relevante e
faz com que os deslocamentos transversais obtidos com a teoria de viga de Timoshenko
sejam superiores aos que resultam da aplicação da teoria de vigas finas.
Também de acordo com o que seria de esperar, a partir de um determinado valor de
L/h as soluções obtidas com as duas teorias são coincidentes. No entanto, para valores
de L/h superiores a um outro valor, verifica-se que a solução aproximada obtida com
os elementos finitos de viga baseados na teoria de Timoshenko passam a apresentar
valores inferiores aos que são dados pela aplicação da teoria de Euler-Bernoulli. E a
5.4. EFEITO DE SHEAR LOCKING
0
117
0
w
w
1000
200
Sem deformação de corte
Sem deformação por corte
2000
400
3000
600
4000
5000
800
Viga de Timoshenko
6000
Viga de Timoshenko
1000
7000
1200
8000
L/h=2
1400
0
0.5
1
1.5
2
2.5
3
3.5
L/h=1
4
9000
0
4
0
x 10
0.5
1
1.5
2
2.5
3
3.5
4
5
0
x 10
w
w
1
1
Sem deformação por corte
Sem deformação por corte
2
2
3
3
4
4
5
Viga de Timoshenko
Viga de Timoshenko
5
6
7
0
0.5
1
1.5
2
2.5
3
3.5
4
6
6
0
0
0.5
1
1.5
2
2.5
3
3.5
4
7
x 10
0
x 10
w
w
1
2
Viga de Timoshenko
Viga de Timoshenko
2
4
3
6
4
5
8
6
Sem deformação por corte
10
Sem deformação por corte
7
12
8
9
0
0.5
1
1.5
2
2.5
3
3.5
4
14
0
0.5
1
1.5
2
2.5
3
3.5
Figura 5.15: Campo de deslocamentos tranversais para diferentes alturas da viga
4
118
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
diferença entre as duas soluções tende a aumentar para valores crescentes do quociente
L/h. Esta situação é inesperada, uma vez que em teoria as duas soluções deveriam ser
coincidentes quando a deformação por corte deixa de ser relevante. Acontece porque
a partir de determinado valor de h começa a surgir o fenómeno de shear locking, ou
fenómeno de travamento por corte.
Este fenómeno é bem visı́vel na figura 5.16, onde se representa a evolução para os
coeficientes θe /θf e we /wf , calculados com base nos resultados obtidos com o modelo de
elementos finitos. Verifica-se que até um determinado valor para L/h, as curvas obtidas
são semelhantes às que se encontram representadas na figura 5.14 e que correspondem
ao comportamento teórico esperado. No entanto, a partir de um determinado valor para
a altura da secção transversal, h, os valores obtidos divergem do valor teórico. Verificase ainda que se o valor do parâmetro L/h for suficientemente grande, os deslocamentos
obtidos com a teoria de Timoshenko tendem a anular-se, o que de um ponto de vista
de comportamento fı́sico da estrutura não faz qualquer sentido.
1.8
w /w
1
e
θe
0.8
f
1.6
θf
1.4
1.2
0.6
1
0.8
0.4
0.6
0.4
0.2
0.2
L/h
L/h
0
0
10
1
10
2
10
3
10
4
10
5
10
0
0
10
1
10
2
10
3
10
4
10
Figura 5.16: Fenómeno de locking
O fenómeno de shear locking, se estiver activo, pode destruir por completo a solução
obtida com recurso ao método dos elementos finitos na análise de vigas de Timoshenko,
mesmo que a malha seja suficientemente refinada para permitir a obtenção de uma boa
solução. Felizmente, existe um procedimento que permite controlar o aparecimento
deste fenómeno. Antes de se discutir este procedimento interessa perceber a razão pela
qual surge o shear locking.
5.4.2
5
10
Porque aparece o shear locking
O fenómeno de shear locking pode aparecer quando a deformação por corte começa
a ser muito pequena, o que sucede quando a relação L/h ultrapassa um determinado
valor. Quando a deformação por corte é desprezável, o próprio modelo tenta impor
γ(x) = 0. Isto faz com que a verificação da condição de compatibilidade (2.10) tenda
5.4. EFEITO DE SHEAR LOCKING
119
a transformar-se em:
0 = θ(x) +
d w(x)
d w(x)
⇒ θ(x) = −
dx
dx
(5.69)
Facilmente se reconhece que a equação anterior corresponde à equação que no caso da
teoria de Euler-Bernouli relaciona o campo de rotações com o campo de deslocamentos
transversais. No entanto, e dada forma como foram definidas as aproximações para
cada um destes campos no desenvolvimento do modelo de elementos finitos baseado
na teoria de Timoshenko, surge uma dificuldade que vai originar o aparecimento do
fenómeno de travamento.
Como é definida uma aproximação linear independente para cada o campo de rotações
e para o campo de deslocamentos transversais, o modelo de elementos finitos pode
originar uma solução disparatada quando tenta igualar o campo de rotações (campo
com variação linear) à derivada do campo de deslocamentos transversais (campo com
valor constante). Esta dificuldade é bem visı́vel no caso da consola discretizada apenas
com um elemento finito. Assumindo que o deslocamento global d2 toma um valor
diferente de zero, a solução aproximada para o campo de deslocamentos transversais
na consola corresponde a uma equação linear, com valor nulo no encastramento e com
um valor igual a d2 na estremidade livre. Quando a altura da secção transversal tende
a ser muito pequena, a deformação por corte tende a anular-se e o valor do campo de
rotações tende a respeitar a condição (5.69). Ora isto obriga a que o campo de rotações
seja constante. Como uma das condições de fronteira cinemática impõe que θ(0) = 0,
a verificação da condição (5.69) obrigaria a que fosse nulo o campo de rotações em
todo o domı́nio. Por outro lado, a existência de um campo de rotações nulo, obriga a
que a variação do campo de deslocamentos transversais seja também nulo em todo o
domı́nio. E como a outra das condições de fronteira cinemática impõe que w(0) = 0,
isto levaria a que o deslocamento transversal em toda a consola fosse também nulo!
Esta é a razão pela qual se desenvolve o fenómeno de shear locking: uma aproximação
independente para o campo de deslocamentos transversais e para o campo de rotações
que pode ficar incoerente quando a deformação por corte se tende a anular e se torna
necessário verificar a condição de compatibilidade (5.69).
5.4.3
Como evitar o shear locking?
Está fora do âmbito desta discussão apresentar com todo o detalhe a fundamentação
matemática do procedimento que evita o desenvolvimento do fenómeno de shear locking. No entanto, pode dizer-se que para se evitar o aparecimento deste efeito deve
ser definida uma aproximação para o campo de deslocamentos transversais de grau
superior ao que é utilizado na definição da aproximação do campo de rotações. Pode
demonstrar-se que este procedimento é equivalente à introdução de uma modificação
no cálculo da parcela de corte da matriz de rigidez elementar, K(el)
c , definida em (5.18).
Antes de se apresentar esta modificação, é necessário recordar que as integrações en-
120
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
volvidas no cálculo das matrizes de rigidez elementares podem ser efectuadas numericamente, utilizando o método de quadratura de Gauss [7, 5]. Sem entrar em detalhes,
recorde-se o procedimento que permite efectuar o cálculo numérico do integral:
I=
Z b
a
f (x)dx
(5.70)
Antes de se efectuar o cálculo numérico, é necessário efectuar uma mudança de referencial por forma a asseguar que a integração se define no intervalo −1 ≤ ξ ≤ 1. Esta
mudança de referencial é definida por:
x = (a + b)/2 + ξ(b − a)/2
(5.71)
Tendo em conta (5.71), é possı́vel escrever:
I=
Z +1
−1
f (x(ξ))Jdξ
(5.72)
onde o Jacobiano da transformação, J, é dado por:
J=
dx
= (b − a)/2
dξ
(5.73)
O método da quadratura de Gauss permite escrever
I=
Z +1
−1
f (x(ξ))Jdξ =
Z +1
−1
f (x(ξ))(b − a)/2dξ =
ng
X
f (x(ξi ))wi (b − a)/2
(5.74)
i=1
Na equação (5.74), ng corresponde ao número de pontos de Gauss envolvidos no cálculo
numérico dos integrais. A cada ponto está associado uma coordenada, ξi , e um peso,
wi . É possı́vel demonstrar que a utilização de ng pontos de Gauss permite integrar
de forma exacta polinómios de grau 2ng − 1. Se a função integranda é polinomial, é
sempre possı́vel identificar qual o número de pontos de Gauss que é necessário utilizar
para obter o valor exacto para a integração.
Na tabela 5.2 apresentam-se os pontos e pesos de Gauss que permitem integrar de
forma exacta polinómios de grau igual ou inferior a três.
Tendo em conta a definição (5.16), é possı́vel verificar que o cálculo numérico da parcela
de flexão requer a consideração de apenas um ponto de Gauss. A integração numérica
permite recuperar a parcela de flexão da matriz de rigidez elementar definida em (5.17).
Problema 5.6 Aplicando o método da quadratura de Gauss recupere a parcela de
flexão da matriz de rigidez elementar definida na igualdade (5.17).
A parcela de corte da matriz de rigidez elementar é definida pela equação (5.18). Tendo
em conta o grau das funções a integrar (há termos que correspondem a polinómios do
5.4. EFEITO DE SHEAR LOCKING
121
ng
ξi
wi
1
0
√
−1/ 3
√
1/ 3
2
2
1
1
Tabela 5.2: Tabela com pontos e pesos de Gauss
segundo grau), conclui-se que a integração exacta desta parcela requer a utilização
de dois pontos de Gauss. Ora é aqui que se introduz o truque que permite evitar
o aparecimento do shear locking. Embora esteja fora do âmbito deste documento a
discussão aprofundada deste procedimento, é importante ficar claro que a sua aplicação
tem sólida fundamentação matemática.
Para evitar o aparecimento de locking, na integração da parcela de corte da matriz de
rigidez elementar vai utilizar-se um número de pontos de Gauss inferior ao que seria
necessário para assegurar uma integração exacta. No caso das vigas de Timoshenko,
utiliza-se apenas um ponto de Gauss para a integração dessa parcela. A este procedimento chama-se integração reduzida selectiva. Diz-se reduzida porque se utilizam
menos pontos de Gauss que os necessários para efectuar uma integração exacta e selectiva porque apenas é efectuado este procedimento para a parcela de corte. A parcela
de flexão continua a ser integrada com um número de pontos de Gauss que permite a
sua integração exacta.
Tendo em conta a mudança de referencial definida (5.71) aplicada a um elemento de
barra com 0 ≤ x ≤ L, obtem-se:
ξi = 0 ⇒ xi = L/2 + L/2 × 0 = L/2
(5.75)
J = L/2
(5.76)
A integração numérica da parcela de corte considerando apenas um ponto de Gauss
vem dada por:
K(e)
c
L/2
1
−L 1 − L
1
L/2
L
L
=
1
0
L
1
0
−
L
0
0
GAc
0
1
−
L
L/2
1−
L
1
L
L/2
L
0
0
L
2
1 2
1
−
L
L
(5.77)
122
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
Simplificando vem:
GAc
GAc
L
L
4
4
GAc
2
GAc
−
2
GAc
L
4
GAc
2
GAc
−
2
GAc
2
GAc
L
GAc
L
4
K(e)
c =
GAc
2
GAc
−
2
−
GAc
2
−
GAc
L
GAc
−
L
GAc
(5.78)
L
A matriz de rigidez elementar, obtida considerando a integração reduzida selectiva é
dada pela soma das parcelas de flexão e de corte
EI
L
EI
−
(e)
L
K =
0
0
−
EI
L
EI
L
0 0
0
0
0
0
0
GAc
GAc
L
L
4
4
GAc
2
GAc
−
2
GAc
L
4
GAc
2
GAc
−
2
GAc
2
GAc
L
GAc
L
0
4
+
GAc
0
2
GAc
0
−
2
−
GAc
2
−
GAc
L
GAc
−
L
GAc
(5.79)
L
A utilização da matriz de rigidez elementar (5.79) permite assegurar que os resultados
obtidos através da aplicação do método dos elementos finitos permite obter soluções
para vigas de Timoshenko onde não surge o fenómeno de shear locking. Permite desta
forma a aplicação da teoria de vigas espessas na obtenção de soluções aproximadas
qualquer que seja a dimensão da secção transversal.
Os gráficos apresentados na figura 5.66 foram de facto obtidos considerando uma malha
com cem elementos de viga de Timoshenko. Com facilidade de verifica que o comportamento observado é exactamente o comportamento teórico esperado, sem haver qualquer
sinal de aparecimento do fenómeno de travamento.
Por fim, convém referir que a integração selectiva reduzida conduz a uma matriz de
rigidez elementar semelhante à que seria possı́vel obter definindo uma aproximação
para o campo de deslocamentos transversais com grau superior ao que é utilizado na
definição da aproximação para o campo de rotações (ver Problema 5.6).
Problema 5.6 Considere a matriz de rigidez determinada na resolução do Problema
5.4. Esta matriz de rigidez está associada a uma aproximação linear para o campo de
rotações e a uma aproximação quadrática para o campo de deslocamentos transversais.
Condense a matriz de rigidez nos graus de liberdade correspondentes aos deslocamentos de extremidade. Compare o resultado obtido com a matriz de rigidez elementar
5.4. EFEITO DE SHEAR LOCKING
123
determinada com recurso à integração selectiva reduzida e que se encontra definida na
equação (5.79) e comente.
158
CAPÍTULO 5. ANÁLISE DE VIGAS DE TIMOSHENKO
Bibliografia
[1] Orlando JBA Pereira, “Introdução ao Método dos Elementos Finitos na Análise de
Problemas Planos de Elasticidade”, 2001;
[2] OC Zienkiewicz e RL Taylor, ”The Finite Element Method - Basic Formulation
and Linear Problems”, Volume 1, 4a edição, McGraw-Hill, Berkshire, 1989;
[3] OC Zienkiewicz e RL Taylor, ”The Finite Element Method - Solid and Fluid Mechanics, Dynamics and Non-Linearity”, Volume 2, 4a edição, Berkshire, 1991;
[4] RD Cook, DS Malkus e ME Plesha, “Concepts and Applications of Finite Element
Analysis”, John Wiley & Sons, New York, 1989;
[5] JN Reddy, “An Introduction to the Finite Element Method”, McGraw-Hill, 2a
edição, Singapura, 1993;
[6] JAT Freitas, “Análise Elástica de Estruturas”, elementos de estudo da disciplina
de Análise de Estruturas I, Instituto Superior Técnico, 1987;
[7] JAT Freitas, ”Introdução ao Método dos Elementos Finitos: Estruturas Articuladas”, elementos de estudo da disciplina de Análise de Estruturas II, Instituto
Superior Técnico, 2009;
159
160
BIBLIOGRAFIA
Conteúdo
1 Introdução
1
2 Análise de vigas - Formulação do problema
5
2.1
Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.2
Vigas de Timoshenko . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.2.1
Campos de deslocamentos . . . . . . . . . . . . . . . . . . . . .
6
2.2.2
Campos de deformações . . . . . . . . . . . . . . . . . . . . . .
7
2.2.3
Campos de esforços . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.2.4
Condições de compatibilidade . . . . . . . . . . . . . . . . . . .
9
2.2.5
Relações de elasticidade . . . . . . . . . . . . . . . . . . . . . .
10
2.2.6
Equações de equilı́brio . . . . . . . . . . . . . . . . . . . . . . .
11
2.2.7
Equação da viga e condições de fronteira . . . . . . . . . . . . .
12
Vigas de Euler-Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.3.1
Campos de deslocamentos . . . . . . . . . . . . . . . . . . . . .
13
2.3.2
Campos de deformações e de esforços . . . . . . . . . . . . . . .
14
2.3.3
Condições de compatibilidade . . . . . . . . . . . . . . . . . . .
14
2.3.4
Relações de elasticidade . . . . . . . . . . . . . . . . . . . . . .
15
2.3.5
Condições de equilı́brio . . . . . . . . . . . . . . . . . . . . . . .
16
2.3.6
Equação da viga e condições de fronteira . . . . . . . . . . . . .
16
2.3
3 Análise de vigas de Euler-Bernoulli
161
17
162
3.1
3.2
3.3
3.4
CONTEÚDO
Formulação do elemento finito de viga
. . . . . . . . . . . . . . . . . .
17
3.1.1
Definição da aproximação do campo de deslocamentos . . . . . .
18
3.1.2
Definição da matriz de rigidez elementar . . . . . . . . . . . . .
23
3.1.3
Vector das forças nodais elementares . . . . . . . . . . . . . . .
25
Análise de uma viga contı́nua (exemplo 1) . . . . . . . . . . . . . . . .
27
3.2.1
Discretização da estrutura . . . . . . . . . . . . . . . . . . . . .
28
3.2.2
Identificação dos deslocamentos independentes . . . . . . . . . .
28
3.2.3
Definição da aproximação . . . . . . . . . . . . . . . . . . . . .
29
3.2.4
Definição das equações elementares . . . . . . . . . . . . . . . .
30
3.2.5
Reunião das equações elementares . . . . . . . . . . . . . . . . .
30
3.2.6
Resolução das equações de equilı́brio globais . . . . . . . . . . .
37
3.2.7
Definição da solução aproximada . . . . . . . . . . . . . . . . .
37
3.2.8
Verificação das condições de equilı́brio . . . . . . . . . . . . . .
39
Análise de uma viga simplesmente apoiada . . . . . . . . . . . . . . . .
41
3.3.1
Discretização com 1 elemento finito . . . . . . . . . . . . . . . .
42
3.3.2
Discretização com 2 elementos finitos . . . . . . . . . . . . . . .
49
3.3.3
Análise de convergência . . . . . . . . . . . . . . . . . . . . . .
56
Análise de uma viga contı́nua (exemplo 2) . . . . . . . . . . . . . . . .
56
3.4.1
Discretização da estrutura . . . . . . . . . . . . . . . . . . . . .
56
3.4.2
Identificação dos deslocamentos independentes . . . . . . . . . .
58
3.4.3
Definição da aproximação . . . . . . . . . . . . . . . . . . . . .
59
3.4.4
Definição das equações elementares . . . . . . . . . . . . . . . .
59
3.4.5
Reunião das equações elementares . . . . . . . . . . . . . . . . .
60
3.4.6
Resolução da equação do método dos elementos finitos . . . . .
61
3.4.7
Análise da solução aproximada obtida . . . . . . . . . . . . . . .
62
4 Análise de pórticos planos
67
CONTEÚDO
4.1
4.2
4.3
4.4
163
Formulação do problema . . . . . . . . . . . . . . . . . . . . . . . . . .
68
4.1.1
Definição das grandezas fı́sicas . . . . . . . . . . . . . . . . . . .
68
4.1.2
Condições de compatibilidade . . . . . . . . . . . . . . . . . . .
68
4.1.3
Relações de elasticidade . . . . . . . . . . . . . . . . . . . . . .
69
4.1.4
Condições de equilı́brio . . . . . . . . . . . . . . . . . . . . . . .
69
4.1.5
Equações para a barra e condições de fronteira . . . . . . . . . .
70
Formulação do elemento finito de pórtico plano . . . . . . . . . . . . .
71
4.2.1
Definição da aproximação . . . . . . . . . . . . . . . . . . . . .
71
4.2.2
Definição da matriz de rigidez elementar . . . . . . . . . . . . .
73
4.2.3
Forças nodais equivalentes . . . . . . . . . . . . . . . . . . . . .
74
Definição da mudança de referencial . . . . . . . . . . . . . . . . . . . .
75
4.3.1
Definição da matriz de transformação . . . . . . . . . . . . . . .
76
4.3.2
Definição da aproximação . . . . . . . . . . . . . . . . . . . . .
77
4.3.3
Matriz de rigidez elementar . . . . . . . . . . . . . . . . . . . .
78
4.3.4
Vector das forças nodais equivalentes . . . . . . . . . . . . . . .
78
Análise de um pórtico plano . . . . . . . . . . . . . . . . . . . . . . . .
79
4.4.1
Discretização da estrutura . . . . . . . . . . . . . . . . . . . . .
79
4.4.2
Identificação dos deslocamentos independentes . . . . . . . . . .
80
4.4.3
Definição da aproximação . . . . . . . . . . . . . . . . . . . . .
80
4.4.4
Definição das equações elementares . . . . . . . . . . . . . . . .
83
4.4.5
Reunião das equações elementares . . . . . . . . . . . . . . . . .
84
4.4.6
Resolução da equação de equilı́brio global
. . . . . . . . . . . .
85
4.4.7
Análise da solução obtida . . . . . . . . . . . . . . . . . . . . .
85
5 Análise de vigas de Timoshenko
91
5.1
Considerações iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . .
91
5.2
Formulação do elemento finito . . . . . . . . . . . . . . . . . . . . . . .
92
164
5.3
5.4
CONTEÚDO
5.2.1
Definição da aproximação . . . . . . . . . . . . . . . . . . . . .
92
5.2.2
Matriz de rigidez elementar . . . . . . . . . . . . . . . . . . . .
95
5.2.3
Vector das forças nodais equivalentes elementares . . . . . . . .
98
Análise de uma viga em consola . . . . . . . . . . . . . . . . . . . . . .
99
5.3.1
Determinação da solução exacta . . . . . . . . . . . . . . . . . . 100
5.3.2
Resolução aproximada utilizando o método dos elementos finitos 101
5.3.3
Refinamento da solução obtida . . . . . . . . . . . . . . . . . . . 107
Efeito de Shear Locking . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.4.1
O que é? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.4.2
Porque aparece o shear locking . . . . . . . . . . . . . . . . . . . 118
5.4.3
Como evitar o shear locking? . . . . . . . . . . . . . . . . . . . . 119
6 Análise de vigas em fundação elástica
123
6.1
Definição do problema . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6.2
Solução Analı́tica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
6.3
Formulação do elemento finito . . . . . . . . . . . . . . . . . . . . . . . 129
6.3.1
Definição da aproximação para o campo de deslocamentos . . . 129
6.4
Análise de uma viga simplesmente apoiada . . . . . . . . . . . . . . . . 130
6.5
Análise da viga simplesmente apoiada utilizando uma malha com três
elementos finitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
6.6
Análise comparativa das soluções aproximadas obtidas . . . . . . . . . 148
6.7
Análise da viga simplesmente apoiada sujeita à acção de uma carga
concentrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
6.8
Análise da viga simplesmente apoiada sujeita à acção de um momento
concentrado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154