PUCGoiás
Física I
Lilian R. Rios
Rotação
O movimento de um cd, de um ventilador de teto, de uma roda
gigante, entre outros, não podem ser representados como o
movimento de um ponto → cada um deles envolve um corpo que
gira em torno de um eixo que permanece estacionário.
Denominamos corpo rígido um modelo de corpo ideal, no qual
desprezaremos qualquer deformação devido à atuação de
formas.
Eixo fixo é um eixo que permanece em repouso em relação a
algum referencial inercial.
29/05/2015
2
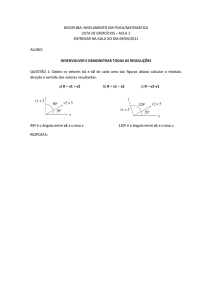
Uma forma de descrever a rotação
desse corpo é escolher um ponto
específico P e acompanhar os valores
de x e y desse ponto.
Em vez disso, basta notar que a linha
OP permanece fixa no corpo e gira
com ele.
O ângulo θ que essa linha faz com o
eixo +Ox descreve a posição da
rotação do corpo.
Usaremos
rotação.
θ como coordenada de
Escolheremos como positivo o sentido
contrário ao sentido da rotação dos
ponteiros do relógio.
29/05/2015
3
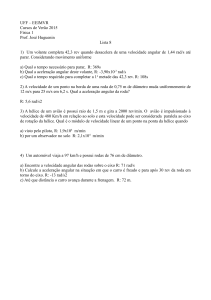
θ (no SI) não é medido em graus, mas em radianos.
Como um ângulo em radianos é a
razão entre dois comprimentos ele é
representado por um número puro,
sem dimensões.
360º
1 rad
57,3º
2
29/05/2015
4
Velocidade angular
A velocidade angular média ωm de um corpo, em um intervalo Δt, é a razão
entre o deslocamento angular Δθ = θ1- θ2 e o intervalo Δt:
A velocidade angular instantânea é limite de ωm quando Δt tende a zero:
29/05/2015
5
Observação:
Quando se diz “velocidade angular”, fala-se da velocidade
angular instantânea e não da média.
A velocidade angular pode ser positiva ou negativa,
dependendo da direção em que o corpo rígido está girando.
A velocidade escalar angular é o módulo da velocidade
angular.
Pontos diferentes de um corpo rígido que gira se movem em
distâncias diferentes em um dado instante, dependendo da
distância entre o ponto e o eixo de rotação. Porém, todos os corpos
giram um mesmo ângulo no mesmo instante. Assim, todos os
pontos de um corpo rígido giram com a mesma velocidade angular.
29/05/2015
6
29/05/2015
7
Quando o ângulo θ é medido em radianos, a unidade da
velocidade angular é o radiano por segundos (rad/s).
Outras unidades como a revolução por minuto (rev/min ou
rpm) são freqüentemente usadas.
Se 1 rev = 2π, duas conversões são úteis:
1rev/s = 2π rad/s
e
1 rev/min = 1 rpm = 2π/60 rad/s
1 rad/s é aproximadamente igual a 10 rpm.
29/05/2015
8
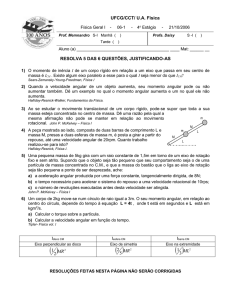
Velocidade angular como um vetor
Conforme observamos na figura, a direção de
é dada pela regra da mão direita. Quando a
rotação se dá em torno do eixo z, então a
velocidade angular possui somente um
componente z que é positivo se estiver ao longo
do eixo positivo de z e negativo se estiver ao
longo do eixo negativo de z.
9
Aceleração Angular
Quando a velocidade angular de um corpo rígido varia, ele possui uma
aceleração angular.
Se ω1 for a velocidade angular instantânea em t1 e ω2 a velocidade angular
no instante t2, a aceleração angular média é definida, no intervalo de
tempo Δt = t2- t1, como a variação da velocidade angular dividida por Δt:
10
A aceleração angular instantânea é o limite de αm quando Δt tende
a zero:
A unidade usual de aceleração angular é o radiano por segundo por
segundo: rad/s².
No movimento de rotação, o movimento é acelerado quando ω e α
possuem o mesmo sinal e o movimento é retardado quando ω e α
possuem sinais contrários.
11
Aceleração angular como um vetor
Quando um objeto gira em torno de um eixo fixo z, α possui apenas um
componente z.
Nesse caso, está orientada na mesma direção de quando a rotação é
acelerada e no sentido contrário quando a aceleração é retardada.
12
Rotação com aceleração angular
constante
Seja ω0 é a velocidade angular de um corpo rígido no instante t = 0
e, seja ω é a velocidade angular num instante posterior t, se α é
constante, é igual à aceleração média para qualquer intervalo:
m
2 1
t2 t1
0 t
Quando a aceleração angular é constante, a velocidade angular
varia com uma taxa uniforme, de modo que seu valor médio entre 0
e t é dado pela média entre o valor inicial e o valor final:
m
0
2
13
como m
:
t
0
2
Substituindo
0
t 0
0 t
1
0 (0 )t
2
em
1
0 (0 )t :
2
1 2
0 0t t
2
14
Combinando as equações:
0 t
e
1
2
0 0t t 2
:
2 ( o )
2
2
0
15
Relações entre Variáveis Lineares e Angulares
Velocidade
(ângulo em radianos)
O vetor velocidade é sempre
tangente a circunferência,
cujo centro é o eixo de
rotação.
29/05/2015
16
Aceleração
(ângulo em radianos)
A aceleração sempre
possui uma componente
radial (centrípeta) e pode
possuir uma componente
tangencial.
(ângulo em radianos)
29/05/2015
17
A componente radial está presente sempre que a velocidade
angular do corpo é diferente de zero( mesmo que não haja
aceleração angular) e aponta para o eixo de rotação. A
componente tangencial está presente apenas se a aceleração
angular é diferente de zero e aponta na direção da tangente à
trajetória do ponto.
29/05/2015
18
29/05/2015
19
Exemplo
29/05/2015
20
Exemplo
29/05/2015
21
Bibliografia
HALLIDAY, D.; WALKER, R. Fundamentos de Física I. Rio de
Janeiro: LTC, 1996.
YOUNG, H. D., FREEDMAN R.A. FÍSICA I, 12a. ed. São Paulo:
Addison Wesley, 2008.
29/05/2015
22