SIBRATEC
BR 470, Km140, Número 5342 - Sl 14 - Polo Ind. de Rio do Sul
89160-000 - Rio do Sul/SC - Fone/Fax: (47) 3521 2986
Email/MSN: [email protected] - Site: www.cca.ind.br
AUTOMAÇÃO INDUSTRIAL
PARTE 5
SENSORES E TRANSDUTORES
Nestor Agostini
Rio do Sul (SC), 01 de setembro de 2008
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
1. SENSORES E TRANSDUTORES
O Vocabulário Internacional de Termos Técnicos apresenta as seguintes definições para transdutor
e sensor:
Transdutor de medição: Dispositivo que fornece uma grandeza de saída que tem correlação
determinada com a grandeza de entrada. Exemplos: termopar, transformador de corrente,
extensômetro elétrico de resistência, eletrodo de pH.
Sensor: Elemento de um instrumento de medição ou de uma cadeia de medição que é diretamente
afetado pelo mensurando. Exemplos: junta de medição de um termômetro termoelétrico, rotor de
uma turbina para medir vazão, tubo de Bourdon de um manômetro, bóia de um instrumento de
medição de nível, fotocélula de um espectrofotômetro.
Na prática, os termos transdutor e sensor são freqüentemente tomados como sinônimos, visto que,
em última análise, ambos convertem um tipo de energia em outra que possa ser mais facilmente
medida.
Há, porém, vários transdutores que não executam a função de um sensor (alto falantes,
microfones, solenóides, etc.).
Resumindo: os transdutores são diferentes dos sensores, embora, em aplicações específicas eles
possam funcionar como tais.
1.1. Características gerais dos sensores e transdutores
O sensor, com certeza, é o elemento mais básico e comum em qualquer processo de automação,
principalmente industrial. É através desse dispositivo que todo o sistema é capaz de coletar
informações da planta fabril e, com base nisso, executar determinada tarefa.
Existem algumas características que são gerais a todos os sensores e outras que são especificas a
um determinado tipo de sensor. Através do conhecimento destes princípios o engenheiro ou
técnico pode escolher e dimensionar o melhor tipo segundo sua necessidade.
A dúvida inicial para se determinar um sensor, geralmente, é: “Quais são os parâmetros a serem
observados na escolha ou dimensionamento de um sensor?”. A resposta a esta dúvida depende do
sensor, porém genericamente, há um conjunto de características importantes a serem consideradas,
que são:
a) Linearidade
É o grau de proporcionalidade entre o sinal gerado e a grandeza física. Quanto maior, mais fiel é a
resposta do sensor ao estímulo. Conseqüentemente, pode-se conferir uma maior precisão ao
sistema.
b) Faixa de atuação
É o intervalo de valores da grandeza em que pode ser usado o sensor, sem destruição ou
imprecisão.
c) Histerese
É a distância entre os pontos de comutação do sensor, quando um atuador dele se aproxima ou se
afasta.
2
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
d) Sensibilidade
É a distância entre a face do sensor e o atuador no instante em que ocorre a comutação.
e) Freqüência de comutação
É a quantidade máxima de mudanças de estado em um determinado intervalo de tempo.
f) Distância sensora
É a distância em que, aproximando-se o acionador da face sensora, o dispositivo muda de estado.
Os transdutores de entrada dos sistemas de medida denominam-se sensores e convertem uma
quantidade física ou química de entrada numa outra (geralmente elétrica) na sua saída.
Os transdutores de saída dos sistemas de medida denominam-se atuadores e convertem uma
quantidade (geralmente elétrica) de entrada numa outra física ou química na sua saída.
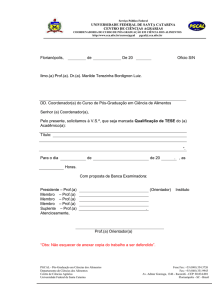
A função de um transdutor pode ser descrito de diversas formas, destacam-se duas formas usuais:
• Estrutura Funcional: onde se descreve o método adotado para realizar a medida através de
funções ou estruturas básicas.
• Estrutura Orgânica: onde se apresenta a função do sistema de medida através da
implementação física de grupos de funções ou estruturas básicas.
Figura 1.1: Descrição funcional e orgânica de um transdutor de pressão
2. ELEMENTOS BÁSICOS DE SENSORIAMENTO
Em geral, os sistemas de sensoriamento possuem elementos sensores ou transdutores que atuam
medindo ou transformando formas de energia. A realização das medições ou transformações de
energia é efetuada por elementos de contato.
3
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
2.1. Formas de energia
Podem-se distinguir seis diferentes formas de energia:
• Energia Luminosa: Energia relacionada com ondas eletromagnéticas de radio, microondas,
infravermelho, luz visível ultravioleta, raios-X, raios gama etc.
Ex. Intensidade luminosa, comprimento de onda, polarização, fase, refletância, transmitância, etc.
• Energia Mecânica: Energia relacionada a forças, deslocamentos e fluxos mecânicos além da
energia gravitacional.
Ex. Força, pressão, torque, vácuo, vazão, volume, espessura, massa, nível, posição, deslocamento,
velocidade, aceleração, inclinação, rugosidade, etc.
• Energia Térmica: Energia relacionada à cinética de átomos e moléculas.
Ex. Temperatura, calor, calor específico, entropia, fluxo de calor.
• Energia Elétrica: Energia relacionada à eletricidade em geral.
Ex. Tensão, corrente, carga, resistência, indutância, capacitância, constante dielétrica, polarização
elétrica, freqüência, duração de pulsos, etc.
• Energia Magnética: Energia correspondente aos fenômenos do magnetismo em geral.
Ex. Intensidade de campo, densidade de fluxo, momento magnético, magnetização,
permeabilidade, etc.
• Energia Química: Energia relacionada com os fenômenos de interação química da matéria.
Ex. Composição, concentração, taxa de reação, toxicidade, potencial de oxi-redução, PH, etc.
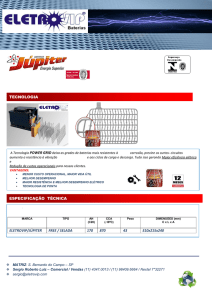
Em geral, os transdutores atuam convertendo as formas de energia apresentadas em sinais
elétricos, visto que é mais fácil realizar medidas nestes últimos.
Figura 2.1: Interação entre as várias formas de energia
4
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Existem uma diversidade de efeitos físicos ou químicos utilizados para a realização de conversão
de energia nos transdutores de entrada ou saída de um sistema de medida.
Como em geral, no caso dos transdutores de entrada ou sensores, deseja-se converter estes sinais
para o domínio elétrico ou do domínio elétrico para outro domínio no caso dos transdutores de
saída ou atuadores, apresenta-se alguns dos efeitos mais usados para a implementação de sensores
e atuadores, nas tabelas a seguir:
Tabela 2.1: Transdução de Energia Luminosa
Efeito
Fotovoltáico
Fotocondutividade
Fotoeletricidade
Fotoluminiscência
Fotodieletricidade
Electrolumiscência
Incandescência
Descrição
Uma tensão é gerada pela radiação
incidente na junção de dois materiais
diferentes
O aumento da condutividade elétrica de
um material devido à incidência de uma
radiação
Elétrons e lacunas são gerados e
separados na área da junção devido a
uma radiação incidente
Uma energia radiante é emitida devido à
uma radiação incidente com menor
comprimento de onda
A mudança de uma constante dialética
devido a uma radiação incidente
Uma energia radiante é emitida devido a
ação de um campo elétrico
Emissão de radiação devido ao
movimento térmico de átomos ativados
por uma corrente elétrica
Tabela 2.2: Transdução de Energia Mecânica
Efeito
Piezoresistividade
Piezoeletricidade
Magnetostrição
Fotoelasticidade
Descrição
Variação da resistência elétrica de um
material devido à mudança da
condutividade ou forma quando sujeito à
deformações mecânicas
Geração de cargas superficiais devido a
forças mecânicas e vice-versa
Deformação mecânica de um material
devido ao campo magnético ou mudança
de magnetização do material devido à
deformação mecânica
Geração de refração dupla devido a
forças mecânicas
5
SIBRATEC
Termoelasticidade
Triboeletricidade
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Geração de uma tensão em duas regiões
de um metal devido a deformações
mecânicas ou diferenças de temperatura
na região
Geração de cargas elétricas superficiais
devido ao atrito entre dois materiais
Tabela 2.3: Transdução de Energia Térmica
Efeito
Descrição
Termoeletricidade (Seebeck)
Geração de uma corrente elétrica num
circuito fechado de dois condutores com
diferentes temperatura de junção
Piezoeletricidade
Mudança de polarização elétrica devido à
variações da temperatura
Incandescência
Emissão de energia luminosa devido ao
aquecimento de um material
Peltier
Geração de uma diferença de temperatura
entre duas junções devido a passagem de
uma corrente elétrica
Nerst
Geração de um campo elétrico devido a um
gradiente de temperatura e campo
magnético
Supercondutividade
Mudança da condutividade para um valor
perto de infinito abaixo de uma temperatura
crítica
Eletro-termico
Geração de calor em um condutor devido a
passagem de uma corrente elétrica
Termocondutividade
Mudança da condutividade elétrica devido à
variações da temperatura
Tabela 2.4: Transdução de Energia Magnética
Efeito
Hall
Magneto-resistência
Magnetostrição
Eletromagnético
Maggi-Righi-Leduc
Descrição
Geração de um campo elétrico em um
condutor, devido à corrente e campo
magnético que se encontram mutuamente
perpendiculares
Mudança da resistividade de um material
devido ao campo magnético
Uma deformação mecânica é gerada num
material ferromagnético pelo campo
magnético incidente
Mudança da magnetização devido à uma
corrente elétrica
Mudança da condutividade térmica
devido ao campo magnético incidente
6
SIBRATEC
Suhl
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Mudança de condutividade na superfície
de um semicondutor devido ao campo
magnético
Tabela 2.5: Transdução de Energia Química
Efeito
Volta
Galvano-elétrico
Químico-magnético
Eletroquímico
Termoquímico
Químico-elétrica
Descrição
Geração de tensões entre dois metais
diferentes
Geração de tensões entre dois metais
diferentes quando imersos num eletrólito
A variação da magnetização de um
material magnético pela absorção de um
gás
Mudança de estrutura devido a uma
corrente elétrica
Mudança de estrutura devido a uma
variação da temperatura
Mudança na condutividade da superfície
de um semicondutor quando em contato
com um eletrólito
3. PRINCIPAIS MODALIDADES DE SENSORES DE USO INDUSTRIAL
3.1. Sensores de posição
Os sensores de posição, em geral, convertem, energia mecânica em sinais elétricos.
Neste grupo encontram-se potenciômetros, encoders, sincros, indutivos de deslocamento,
sensores a laser e os ultrassônicos.
a) Potenciômetro: é um sensor de posição do tipo absoluto e com saída analógica. Basicamente,
consiste de uma resistência elétrica de fio enrolado ou de uma pista de material condutor,
distribuídos ao longo de um suporte que pode ser em forma de arco ou linear. Há um cursor que
desliza sobre o material condutivo ligado a um contato. Dependendo da posição em que se
encontra o cursor a resistência entre o início da pista e o próprio cursor é alterada. Esta alteração
de resistência é utilizada como indicador de posição.
A taxa de variação da resistência em função do giro ou do deslizamento do cursor pode ser:
- Linear: a variação da resistência é diretamente proporcional ao ângulo de giro;
- Logarítmica: a variação segue uma curva log;
- Anti-logaritmica: a variação segue uma curva anti-log;
- Etc.
Na prática há vários tipos de potenciômetros.
7
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 3.1: Estrutura dos potenciômetros
O tipo de aplicação determina o modelo a ser escolhido.
Figura 3.2: Potenciômetros comerciais
Esquematicamente o potenciômetro possui o seguinte símbolo.
Figura 3.3: Símbolo de potenciômetro
8
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Para a escolha do tipo de potenciômetro a ser aplicado a um sistema de automação é necessário
considerar itens tais como: precisão, sensibilidade, formato mecânico, etc.
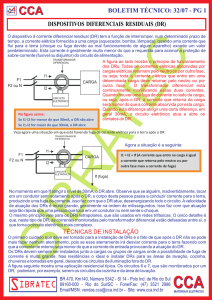
Exercício resolvido: O esquema abaixo representa um sistema de automação onde um
potenciômetro linear de 100 kΩ de resistência total recebe a informação da posição de giro de uma
polia. Sabendo-se que o ângulo de giro do potenciômetro é de 270° e que os valores mínimo e
máximo de resistência entre os pontos B e A é 1 kΩ e 99 kΩ, respectivamente, determine qual a
voltagem mínima, máxima e qual sua variação por grau de giro da polia.
Solução:
Figura 3.4: Utilização de potenciômetro
A menor tensão obtida ocorre quando a resistência entre B e A é de 1 kΩ. Nesta condição a
resistência entre B e C é de 99 kΩ.
1
.24 = 0,24V
Pela regra da divisão de tensão tem-se: Vsinal minimo =
100
Vsinal máximo =
99
.24 = 23,76V
100
Para um giro de 270°, obtém uma variação de tensão de 23,76 – 0,24 = 23,56 V
Através de regra de três, concluí-se que:
1o = 8,8mV
b) Encoder: o encoder é um sensor de posição digital, ou seja, a saída é em formato de pulsos
elétricos e não de uma variação de tensão como nos potenciômetros. Do ponto de vista de
construção física externa, os encoders tem semelhança com um potenciômetro.
9
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 3.5: Encoder
Internamente, no entanto, não há nenhuma similaridade com os potenciômetros. Os pulsos são
gerados por um rotor que gira uma ou mais pistas circulares, concêntricas com faixas opacas e
translúcidas. Sobre essas faixas é instalado um sensor foto acoplador, geralmente, foto transistor e
led. O led produz luz e esta somente atinge o foto transistor nos momentos em que a faixa
translúcida passa pelo sensor, desta maneira são gerados pulsos 0, quando a faixa preta passa pelo
sensor e 1 quando a faixa translúcida passa pelo sensor.
Figura 3.6: Princípio de funcionamento do encoder
Quanto a forma de apresentação dos pulsos, os encoders podem ser classificados em:
b1) Incrementais: são encoders que contam pulsos a partir de um ponto zero. O início da
contagem pode ocorrer a qualquer momento, por isso são ditos incrementais. É o mesmo principio
de funcionamento do mouse dos computadores. Existem vários modelos de encoders incrementais,
alguns possuem apenas um canal, ou seja, apenas uma pista de faixa de forma que fornecem
somente uma seqüência de pulsos sem nenhuma espécie de formatação. Existem também modelos
que fornecem, além da seqüência de pulsos dentro de cada giro, um pulso a cada volta, assim
consegue-se determinar o número de voltas. Outro modelo possui a capacidade de perceber o
sentido de rotação. Um sistema para determinar o sentido de rotação consiste na utilização de dois
sensores separados entre si por p+1/4, onde p é o passo do disco. Ao girar o rotor produz pulsos
quadrados em cada sensor defasados de ¼ do período se o rotor estiver girando em um sentido.
No outro sentido a defasagem aumenta para ¾ do período. Assim, consegue-se determinar o
sentido da rotação.
10
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
A
A
B
B
SENTIDO HORÁRIO
SENTIDO ANTI-HORÁRIO
Figura 3.7: Funcionamento do encoder incremental
b2) Absolutos: os encoders absolutos são do tipo multi-pista. Eles possuem, internamente, um
conjunto de pistas que criam um código. Desta maneira, em cada posição ele gera uma
combinação de pulsos diferente. Os códigos usualmente utilizados são o Gray, o BCD ou o binário
puro.
Figura 3.8: Funcionamento do encoder absoluto
b3) Especificação de encoders
Para especificar encoders é necessário considerar alguns aspectos importantes, tais como:
1. Tipo: decidir entre um encoder incremental ou um absoluto. Em geral, os encoders
absolutos são bem mais caros do que os incrementais. A decisão entre um tipo ou outro deve ser
11
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
tomada em função do que se pretende desenvolver. Com o encoder absoluto sempre é possível
saber a posição correta de um dispositivo, pois o código gerado é diferente para cada posição.
Com encoder incremental, geralmente, é necessário ressetar o sistema e iniciar a partir de um
ponto definido para ajustar a posição. A tentativa de ajustar posições com um encoder incremental
pode levar a erros acumulativos, que ao final de um percurso podem gerar grandes distorções em
relação ao desejado. Observe a figura. Suponha que o ponto A seja o ponto zero e que em quatro
passos pretende-se atingir o ponto G, de modo cumulativo:
- no primeiro movimento deseja se atingir B, porém, devido a erros o ponto atingido
foi C;
- no segundo movimento pretende-se chegar ao ponto D, porém, como já se está partindo de um ponto errado a tendência é que haja um erro em D que é o erro já existente somado com um novo erro que pode ser introduzido; assim chega-se a E;
- no trajeto seguinte ocorre o mesmo problema, com o erro tendendo a aumentar. O
ponto correto seria o F porém pode-se atingir o ponto G.
O procedimento recomendado para esta situação é o seguinte:
- primeiro realiza-se o movimento de A para B e, do mesmo modo que no caso anterior pode
haver um erro e pode-se chegar em C;
- no segundo passo resseta-se a máquina, ou seja, volta-se ao ponto A (zero);
- no terceiro movimento tenta-se atingir D. Pode haver um erro, porém o fato de estar
partindo de um ponto conhecido a tendência é que este erro seja menor do que o obtido no
modo anterior;
- procede-se da mesma maneira para chegar a F. Primeiro resseta-se a máquina e, em
seguida, realiza-se o movimento até F, podendo haver um erro, porém menor do que o erro
obtido no modo de operação anterior.
A
BC
D E
F
G
Figura 3.9: Propagação de erros
2. Tensão de alimentação: existem encoders para as mais diversas tensões de alimentação.
Evidentemente, deve-se escolher a que melhor se adapta ao restante do projeto;
3. Pulsos por volta (para os modelos incrementais): quanto maior for o número de pulsos por
volta, maior é a sua resolução, porém, o aumento da resolução implica no aumento de custo;
4. Número de canais: (para os modelos incrementais):
5. Número de bits de resolução (para os absolutos): o aumento do número de bits de resolução
implica em aumento de custo
6. Freqüência máxima de operação: os encoders são limitados a certa velocidade máxima que
precisa ser avaliada quando da aplicação;
7. Tipo de sinal de saída: sempre depende do restante do sistema, a não ser que seja um sistema
totalmente novo onde pode ser especificado qualquer saída. Dentre as várias modalidades de sinal
12
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
de saída tem-se: NPN, PNP – são saídas a transistor em coletor aberto. A saída NPN, push pull,
TTL.
8. Tipo de fixação: axial ou radial.
c) Folha de especificações típica de um encoder
13
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
14
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
15
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
16
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 3.10: Folha de especificações técnicas do encoder incremental
17
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
18
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
19
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 3.11: Folha de especificações técnicas do encoder absoluto
20
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
c4) Exercícios resolvidos:
1. Um determinado sistema requer a monitoração de deslocamento de uma peça (P) sobre um
cilindro com diâmetro de 100 mm, ligado a um motor (M) com rotação de 900 rpm. Não nenhuma
possibilidade de haver escorregamento entre a peça P e o cilindro (C). Um encoder é ligado ao
eixo do cilindro. Admitindo que o avanço da peça necessita ser monitorado em até 1 mm com
uma precisão de 0,1 mm. Admitir que o sistema avança, produz uma peça, recua, recebe o novo
material, avança novamente, produz outra peça e assim sucessivamente.
Especificar o encoder incremental necessário a esta aplicação.
M
AVANÇO DA PEÇA
SENTIDO DE ROTAÇÃO DO
MOTOR DURANTE O AVANÇO
DA PEÇA
P
C
ENCODER
Figura 11.14: Uso do encoder
Solução: Primeiramente é necessário saber a relação entre o avanço da peça e a rotação do motor,
ou seja, quantos milímetros a peça avança para cada rotação do motor. Esta relação é conseguida
através do diâmetro do cilindro.
Avanço = d.π
Avanço = 100.3,14
Avanço = 314mm
Assim, a cada rotação a peça avança 314 mm.
Conforme solicitado é necessária uma definição de 1 mm com exatidão de 0,1 mm. Ou seja são
necessários, no mínimo, 10 pulsos por milímetro de avanço. O encoder pode então ser
especificado:
Número _ de _ pulsos = 314x10
Número _ de _ pulsos = 3140 / rotação
Precisa-se de um encoder com, no mínimo 3140 pulsos por rotação.
As demais especificações são todas obtidas do enunciado do problema:
- freqüência máxima de operação: 900rpm ou 15 Hz;
- Necessita de dois canais, pois é necessário determinar o sentido de rotação do motor;
2. Resolver o mesmo exercício anterior utilizando um encoder absoluto com saída digital direta.
Neste caso é necessário especificar o número de bits de resolução.
21
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Solução: A relação entre o avanço da peça e a rotação já é conhecida do problema anterior, 314
mm por rotação.
Para obter a resolução de 0,1 mm são necessárias 3140 posições. Para a saída digital direta vale a
seguinte relação:
2 x = 3140
ln(2 x ) = ln(3140)
x. ln(2) = ln(3140)
ln(3140) 8,052
x=
=
ln(2)
0,693
x = 11,6
Onde x representa o número de bits necessários.
Observar que 11 bits são poucos e 12 bits é o primeiro inteiro superior a 11,6. Isto significa que o
encoder precisa ter uma resolução de 12 bits.
As demais especificações são as mesmas do problema anterior.
d) Sincros e resolvers: são transdutores de posição angular eletromagnéticos. Seu principio de
funcionamento se resume em um transformador onde um dos enrolamentos é rotativo. Na figura é
mostrado em sincro trifásico. Quando se aplica uma tensão ao enrolamento rotativo, se recolhe em
cada fase dos enrolamentos estáticos uma tensão cujo valor é dado por:
V1 = V2 .senθ
Figura 3.12: Funcionamento do sincro
22
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Onde V1 e V2 são tensões que dependem dos aspectos construtivos do sincro e θ é o ângulo entre
o enrolamento fixo e o enrolamento rotativo. Observar que, pelo fato do estator ser trifásico é
possível determinar, além do deslocamento, também seu sentido.
No caso de existir somente uma fase no estator há uma indefinição do sentido do deslocamento,
visto não haver outras fases para realizar a comparação de tensões. Para solucionar este problema
foi implementado um sincro com uma configuração especial, denominado de resolver. Os
enrolamentos do estator são alimentados em série, produzindo um campo estacionário sobre o eixo
y. Os enrolamentos do rotor recolhem tensões diferentes em função da montagem.
Figura 3.13: Funcionamento do resolver
e) Inductosym: os sensores inductosym possuem como principio de funcionamento
eletromagnético e são utilizados em máquinas de controle numérico. O dispositivo consiste de
uma régua estática e um cursor que se movimenta sobre ela. A régua contém um filme metálico
com a forma de uma onda quadrada, com um período (g) em (mm). O cursor tem dois padrões
semelhantes e quando acoplado à régua o sistema se comporta como um transformador plano,
assim o cursor será o primário e a régua o secundário. Se forem aplicadas tensões no primário:
e1 = e. sen(ω.t )
e 2 = e. cos(ω.t )
com ω = freqüência da excitação
A tensão no secundário será:
e s = e x . sen(ω.t + g.s)
sendo s = o deslocamento da bobina e1 em um período. Notar que
quando o deslocamento é igual a um período da régua.
se completará um ciclo
23
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 3.14: Funcionamento do inductosym
f) Laser: o laser é utilizado na detecção de distância utilizando as propriedades da interferência de
raios luminosos. Em geral, a emissão do laser é pulsada em certa freqüência de operação. O
princípio de funcionamento se baseia na superposição de duas ondas de mesma freqüência: uma
direta e outra refletida. A onda resultante passa por valores máximos e mínimos de acordo com a
fase do sinal refletido (franjas). Os sensores industriais geram um raio de luz que se divide em
duas partes ortogonais mediante um separador. Um raio é aplicado sobre um espelho plano fixo,
enquanto que o outro se reflete no objeto em que se deseja determinar a distância. Os dois raios se
sobrepõem novamente no separador, de forma que ao separar-se geram máximos mínimos a cada
múltiplo do comprimento de onda da luz. A distância é determinada contando as oscilações
(conhecidas também como franjas), obtendo-se uma saída digital de grande precisão.
OBJETO QUE SE
DESEJA DETERMINAR
A DISTÂNCIA
ESPELHO PLANO
SEPARADOR DE RAIOS
RAIO REFLETIDO
GERADOR DE
RAIOS LASER
RAIO ENVIADO
CONJUNTO
FOTODETECTOR
VISUALIZADOR MÉTRICO
PROCESSADOR
CONTADOR
VISUALIZADOR
DE FRANJAS
Figura 3.15: Funcionamento do sensor laser
g) Ultrassônicos: os sensores ultrassônicos baseiam-se no princípio da reflexão do som. É emitido
um raio ultrassônico, geralmente pulsado, com freqüência da ordem de 200 kHz ou mais, que
atinge o objeto do qual se quer determinar a distância e mede-se o tempo até o retorno do sinal
refletido. Usualmente são empregados para detectar o nível em depósitos de sólidos, falhas do tipo
gretas em montagens industriais, profundidade de água, medições remotas de distância, etc.
24
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
h) Fotoelétricos de triangulação: os sensores fotoelétricos de triangulação conseguem
determinar a distância em que se encontra um ponto utilizando diodos sensíveis à posição. São
utilizados dois receptores e tanto os receptores como o emissor são munidos de lentes asféricas
que permitem maior precisão de detecção. O sensor funciona da seguinte maneira: o emissor emite
um feixe de luz que é refletido pelo objeto alvo. A luz refletida chega às lentes asféricas dos
receptores que se encarregam de concentrar a luz em um ponto dos diodos sensíveis à posição.
Este componente tem a característica de fornecer duas correntes elétricas que são proporcionais ao
ponto de incidência da luz. Como o ponto de incidência da luz nos diodos muda de acordo com a
posição do objeto pode-se, através de um circuito de controle, selecionar a área de detecção do
sensor. Além disso, pelo fato destes diodos não dependerem da quantidade de luz refletida pelo
objeto e sim de sua posição, pode-se detectar objetos de diferentes cores ou multicoloridos sem a
necessidade de reajustar a sensibilidade.
4. SENSORES PARA DETECÇÃO DE EVENTOS
4.1. Sensor indutivo: O sensor indutivo, também conhecido como sensor de proximidade, é
capaz de detectar a presença (ou não) de um objeto metálico quando este estiver a determinada
distância da sua face (distância sensora). Seu princípio de funcionamento é baseado na geração de
um campo eletromagnético de alta freqüência, que é desenvolvido por uma bobina ressonante
instalada na face sensora (Figura 4.1).
Figura 4.1: Funcionamento do sensor indutivo
A bobina faz parte de um circuito oscilador, que em condição normal (não acionada), gera um
sinal senoidal. Quando um metal se aproxima do campo, este através da corrente de superfície
absorve energia, reduzindo a amplitude do sinal gerado no oscilador. Esta variação do valor
original é, então, detectada e aciona o estágio de saída.
Na Figura 4.2 pode-se observar o diagrama eletrônico simplificado de um sensor indutivo.
25
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 4.2: Diagrama eletrônico do sensor indutivo
Vantagens do uso de sensores indutivos ao invés de chaves fim de curso convencionais
- Número de manobras: por não ter partes móveis (acionamento estático), a capacidade de
operação de um sensor indutivo é muito maior que uma chave convencional;
- Ausência de contato físico: como se trata de um sensor de proximidade, não há necessidade de
contato físico com a parte em movimento. Novamente, isso contribui para o aumento significativo
da vida útil do sistema;
- Velocidade de atuação: ela é maior que a de uma chave mecânica, uma vez que não há inércia na
sua operação.
A Figura 4.3 ilustra um exemplo do campo de atuação, tendo como referência sua superfície ativa.
Figura 4.3: Campo de atuação do sensor indutivo
A Figura 4.4 traz alguns exemplos de aplicação.
26
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 4.4: Aplicações do sensor indutivo
Outro "nome" atribuído ao sensor indutivo é sensor "não faceado". Essa denominação origina-se
do aspecto de instalação do componente, que por razões óbvias deve ter uma "zona livre" de metal
ao seu redor. Através da Figura 4.5, pode-se estimar as distâncias mínimas que um sensor deste
tipo deve respeitar, caso seu alojamento seja metálico, a fim de que não ocorram comutações
errôneas.
Figura 4.5: Atuação do sensor indutivo
Como será visto a seguir, sensores para materiais isolantes (não metálicos) são, também,
classificados como faceados, uma vez que "faceiam" seu alojamento sem correr riscos de
acionamento indevido.
Os sensores industriais, sejam eles indutivos ou não, podem ter suas saídas nas configurações pnp
ou npn. A Figura 4.6 mostra como, no primeiro, caso (pnp) a comutação da carga é feita através
do pólo positivo da fonte. Tomando um CLP como exemplo, a carga seria acionada com + 24 Vcc
no seu terminal livre. Já a configuração npn conecta a carga ao zero volt, uma vez que essa já está
com o pólo positivo ligado.
Figura 4.6: Sensor indutivo PNP e NPN
27
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
As saídas, normalmente, podem ser de 2, 3, ou 4 condutores, sendo esse último com (no mínimo)
um contato tipo NA e um NF (Figura 4.7).
Figura 4.7: Tipos de saídas de sensores indutivos
4.2. Sensor capacitivo: Ao contrário do sensor indutivo, que funciona através da formação de um
campo eletromagnético e é indicado para detecção de partes metálicas, o capacitivo funciona
segundo um campo elétrico e é ideal para sensoriar materiais isolantes (líquidos, plásticos, vidros,
entre outros). Para compreender melhor como ele faz isso, é necessário relembrar alguns
conceitos básicos dos capacitores. A capacidade de armazenar cargas de um capacitor, pode ser
expressa pela fórmula:
Onde;
e = constante dielétrica ou permissividade.
S = área entre placas
d = distância entre placas.
Concluí-se, então, que a capacidade de armazenar cargas do componente é diretamente
proporcional a área formada entre as placas e a constante dielétrica, e inversamente à distância
entre elas.
Como referência, o ar possui uma constante dielétrica e0 = 1.
Convém lembrar que este valor é uma referência, e que dizer que "1" é igual a 8,9 x 10-12 F/m
(Faraday/metro).
A seguir, na Tabela 4.1 é apresentada a constante dielétrica dos materiais mais comuns. Quando
se atribui 2 à madeira, por exemplo, significa que, fisicamente, ela apresenta 17,8 x 10-12 F/m (2
x eo).
28
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Tabela 4.1: Constante dielétrica de materiais mais comuns
T
A detecção do objeto neste tipo de sensor ocorre segundo uma variação da capacitância. Conforme
se viu, esta depende de três variáveis em um capacitor. No sensor capacitivo, entretanto, duas
delas já são fixadas e determinadas na concepção do dispositivo (S e d).
A Figura 4.8 mostra que a diferença fundamental entre o sensor capacitivo e o capacitor
convencional é que as placas não estão uma de frente para a outra, mas sim uma ao lado da outra.
A área e a distância entre elas é fixa, e como as placas estão dispostas segundo esta geometria, a
capacitância do elemento na ausência de um material dielétrico pode ser considerada desprezível.
Figura 4.8: Capacitor convencional X sensor capacitivo
Uma vez que um objeto dielétrico aproxima-se, porém, ao adentrar no campo elétrico sob a
superfície do eletrodo, causa uma mudança na capacitância do conjunto. Este fenômeno produz
uma oscilação com uma amplitude tal que seja detectada por um circuito e convertida em um
comando para a comutação do estado da saída (Figura 4.9).
29
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 4.9: Funcionamento do sensor capacitivo
Resumindo, o sensor capacitivo funciona de acordo com a variação da constante dielétrica do
material a ser detectado, através de um campo elétrico, e cuja alteração da sua capacitância aciona
um comando de chaveamento na saída.
4.3.
Sensores ópticos
Os sensores óticos, além de serem utilizados para a detecção de distância entre corpos, conforme
já visto anteriormente, servem também para a detecção de eventos. Existem várias configurações
que podem ser utilizadas para este fim.
a) Difuso
Nesta configuração, o transmissor e o receptor são montados na mesma unidade, sendo que o
acionamento da saída ocorre quando o objeto a ser detectado entra na região de sensibilidade e
reflete para o receptor a feixe de luz emitido pelo transmissor (Figura 4.10).
Figura 4.10: Sensor ótico difuso
b) Reflexivo
O sensor óptico reflexivo, também conhecido como retro-reflexivo, assim como o difuso, tem o
transmissor e o receptor montados em uma única unidade. O feixe de luz chega ao receptor após a
incidência em um espelho e o acionamento da saída ocorre quando o objeto interrompe o feixe
(Figura 4.11).
30
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 4.11: Sensor ótico reflexivo
Este tipo de sensor é muito utilizado em segurança de áreas, conforme se pode ver na Figura 4.12 .
Um robô é cercado por um feixe infravermelho que, após reflexões sucessivas, atinge o receptor.
Caso um objeto interrompa esse feixe, o sensor será atuado, paralisado o trabalho.
Figura 4.12: Aplicação do sensor ótico reflexivo
Um cuidado a ser tomado na utilização de um sistema como este, é orientar o usuário quanto a
limpeza dos sensores e espelhos. A sujeira pode gerar acionamentos indevidos. Caso o ambiente
seja muito rico em poeira ou qualquer outra partícula em suspensão (névoa de óleo, por exemplo),
31
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
talvez seja mais indicado utilizar outro tipo de sensor.
c) Barreira de Luz
Este sensor, ao contrário dos dois anteriores, é montado em duas unidades distintas: uma
transmissora e outra receptora. Cada unidade fica de um lado da trajetória do objeto-alvo, uma vez
que este interrompe o feixe, e o sensor é ativado. Atualmente este é o tipo de sensor mais utilizado
para realizar proteção de máquinas industriais onde o operador manipula objetos com a mão.
11.4.4. Sensores ultra-sônicos: O sensor ultra-sônico emite pulsos cíclicos ultra-sônicos que,
quando refletidos por um objeto, incidem no receptor, acionando a saída do sensor. Tanto o
emissor como o receptor estão montados na mesma unidade, portanto, é necessário que haja uma
reflexão (eco) do ultra-som de modo que este ative o receptor.
Figura 4.13: Utilização do sensor ultrassônico
Neste caso também se deve ter cuidado quando se decidir utilizar um sensor deste tipo, devido ao
alinhamento angular. Dependendo da inclinação do alvo o eco pode desviar-se para uma direção
diferente do sensor, não chegando ao receptor (localizado no mesmo componente). Geralmente
este tio de sensor permite uma inclinação máxima de mais ou menos 3º (figura 4.13).
Assim como o óptico, o sensor ultra-sônico pode suprimir o fundo (desprezar o eco do que não é
objeto alvo de detecção). Neste caso, tem-se o tipo de barreira de reflexo. Vale reparar que o
sensor ultra-sônico pode operar tal qual um óptico, no que se refere a
capacidade de detecção (Figura 4.14).
32
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 4.13: Utilização do sensor ótico e ultrassônico
11.4.5. Sensores de temperatura: A temperatura é a medida da agitação molecular de um corpo.
A impossibilidade de realizar diretamente esta medição conduziu ao desenvolvimento de métodos
indiretos de medida. Estes métodos estão baseados nos efeitos da temperatura sobre a matéria.
Os principais sensores utilizados são:
a) Termopar: A temperatura é medida através de uma diferença de tensão originada na junção de
dois metais diferentes posicionados em dois locais com temperaturas diferentes. Uma das junções
é a de medição; a outra, a de referência (Figura 7.31). A junção de medição é colocada junto ao
material cuja temperatura se quer medir enquanto a outra junção é colocada em um ambiente com
temperatura conhecida. Quando existe diferença entre as temperaturas das duas junções, é gerada
uma diferença de potencial entre as mesmas (Figura 11.33). O valor desta diferença de potencial
relaciona-se à temperatura da junção de medição. Na prática, os sensores do tipo termopar são
feitos de várias ligas de metais, de acordo com a faixa de temperatura que se deseja medir. Por
exemplo: o termopar cobre/constantam é útil na faixa de -180°C a 400°C; o platina/platina-ródio é
utilizável na faixa de 0°C a 1500°C.
33
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
A
MATERIAL X
MATERIAL Y
B
CALOR
MATERIAL Y
v
Figura 4.14: Princípio de funcionamento dos termopares. A junção
A é a de referência. B é a junção de medição
b) Termistor: A resistência elétrica é uma característica afetada pela temperatura em,
praticamente, todos os elementos resistivos utilizados. Para alguns tipos de materiais, a resistência
é alterada de modo significativo pela temperatura. Estes materiais são utilizados para a fabricação
de um tipo especial de resistor, denominado termistor. Em geral, são fabricados com óxidos de
vários metais, como níquel, manganês, ferro, cobalto e cobre, encapsulados em resina epóxi ou em
vidro. A medição cuidadosa da resistência serve como indicativo da temperatura com precisão
típica de ±0,1°C. Com estes dispositivos é possível alcançar resolução de 0,001°C. Podem ser
utilizados dentro de faixas de temperatura que vão deste -80°C até 150°C.
Existem dois tipos de termistores, os PTC (Positive Temperature Coefficient – coeficiente positivo
de temperatura) e os NTC (Negative Coefficient Temperature – coeficiente negativo de
temperatura). Nos termistores tipo PTC, a resistência é diretamente proporcional à variação da
temperatura. Nos NTC, a resistência decresce com o aumento da temperatura, porém, a variação
não é linear (Figura 4.15).
R (Ω)
PT C
NTC
Temp (°C)
Figura 4.15: Curvas características de variação da resistência em
função da temperatura nos termistores
34
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
c) Semicondutor: os sensores de temperatura baseados em semicondutores aproveitam a
propriedade das junções PN de alterarem a sua queda de tensão em função da temperatura. Podese demonstrar que, para uma junção PN de silício, a queda de tensão varia da seguinte maneira
(MALVINO, 1997):
∆V
= −2mV / °C
∆T
Esta variação da queda de tensão passou a ser utilizada para construir sensores de temperatura.
Estes sensores são bastante lineares e muito sensíveis, dentro da sua faixa de atuação. Atuam em
faixas de temperatura desde -80°C até 150°C. Atualmente, vários sensores a semicondutor
fornecem saída de sinal digital. Estes são, geralmente, constituídos por um sensor analógico (tipo
junção semicondutora), acoplado a um circuito eletrônico condicionador de sinal, que converte a
variação de queda de tensão em sinais digitais. Na apresentação dos componentes utilizados neste
trabalho são mostradas as características dos sensores aqui utilizados.
4.6. Sensores de umidade: Existem vários sensores que possibilitam a medição da umidade
relativa do ar. Dois deles, bastante difundidos:
a) Resistivo: Estes utilizam a propriedade de alguns materiais (certos polímeros orgânicos) de
alterar sua resistência elétrica em função da umidade. Estes sensores possuem uma relação não
linear entre a resistência e a umidade. Em geral, não conseguem apresentar resultados em toda a
faixa de medição, a qual é de 0% a 100% de umidade relativa.
b) Capacitivo: São construídos em forma de um capacitor. Duas lâminas metálicas separadas por
um material isolante que forma o dielétrico. A umidade do ar afeta a constante dielétrica do
material isolante, alterando a capacitância do conjunto.
Um indicativo usual da umidade, quando são utilizados sensores capacitivos, é a freqüência de
oscilação de um circuito, que varia em função da alteração da capacitância.
Estes sensores possibilitam medição em toda a faixa (0% a 100% de umidade relativa) permitem a
construção de aparelhos portáteis. Por isso, popularizaram-se a tal ponto que atualmente
dominam o mercado.
35
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Em geral, o sinal de saída desses sensores é uma tensão proporcional à umidade relativa. A Figura
4.16 mostra o sinal de saída e o aspecto físico típico de um sensor de umidade comercial.
Figura 4.16: Sinal de saída do sensor de umidade HIH3610 (Honeywell)
4.7. Sensores de deslocamento de fluxo de ar: O deslocamento do fluxo de ar é medido deforma
indireta. O que se mede é o efeito do deslocamento do ar sobre algum componente. Dentre as
várias maneiras disponíveis no mercado tem-se:
a) Mecânicos do tipo ventoinha: O sensor é uma ventoinha exposta ao fluxo de ar. Sua rotação
é proporcional à velocidade do fluxo de ar. Basta, portanto, criar uma escala que relacione taxa de
rotação da ventoinha com a velocidade do ar. Este sistema é muito prático para estações
meteorológicas e para locais onde a velocidade do ar é suficientemente elevada para vencer o
atrito dos mancais (ou rolamentos) da ventoinha;
b) Térmicos: A anemometria térmica é uma técnica de medição de velocidade de fluidos que vem
sendo estudada e utilizada há várias décadas. Fundamentalmente, baseia-se no princípio de que um
elemento resistivo aquecido, quando submetido a um fluxo de fluido, perde calor, diminui sua
temperatura e altera sua resistência elétrica. A variação da temperatura ou de sua resistência
elétrica podem ser utilizadas como indicativo da velocidade do fluido a que foi submetido. O
termistor (elemento geralmente utilizado como sensor) deve ser mantido a uma temperatura
suficientemente elevada, de modo que a influência da temperatura ambiente não tenha efeitos
significativos sobre a medição, ou deve possuir uma correção de leitura em função da temperatura
ambiente.
Para determinar-se a velocidade de um fluido, utilizando-se anemometria térmica, pode-se
empregar duas técnicas:
- mantém-se a potência entregue ao termistor constante e mede-se a sua
temperatura. Neste caso, a temperatura do termistor é um indicativo da velocidade
36
SIBRATEC
-
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
do fluido. Assim, necessita-se de um termômetro para obter a grandeza desejada o
que se constitui em um complicador para a utilização deste método.
varia-se a potência entregue ao termistor de forma a mantê-lo com temperatura
constante. Neste caso, a potência entregue é um indicativo da velocidade do fluido.
Caso lhe seja suprida uma corrente constante, então, pode-se utilizar a queda de
tensão sobre o elemento resistivo para determinar a velocidade do fluido. Este é o
método de determinação de velocidade do fluxo de ar utilizado neste trabalho.
Os sensores utilizados na anemometria térmica, geralmente, são termistores com inércia
térmica suficiente baixa para serem sensíveis às mínimas variações do fluxo de ar. A Figura
4.17 mostra um típico sensor do tipo termistor.
Figura 4.17: Termistor
5. ATUADORES
Dentro de uma malha de controle, o elemento final de controle, que tem por objetivo reposicionar
uma variável, de acordo com um sinal gerado por um controlador, é chamado de atuador, pois atua
diretamente no processo, modificando as suas condições.
São dispositivos utilizados para conversão de sinais elétricos provenientes dos controladores, em
ações requeridas pelos sistemas que estão sendo controlados.
Tal procedimento pode ocorrer:
- Sem necessidade de operador,
- Com operador supervisionando continuamente, ou agindo em tempo real.
Em geral sistemas automáticos não precisam de operador. O atuador efetua a operação para a qual
foi projetado de forma totalmente automática.
Do ponto de vista da energia utilizada para realizar o efeito sobre o processo, os atuadores podem
ser classificados em:
37
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Pneumáticos: Utilizam algum gás comprimido para realizar a atuação. Em geral este gás
comprimido é o próprio ar atmosférico.
Este tipo de atuador é normalmente empregado em sistemas onde se requer altas velocidades nos
movimentos, com pouco controle sobre o posicionamento final, em aplicações onde o torque
exigido é relativamente baixo.
Figura 5.1: Válvula pneumática
Os atuadores pneumáticos mais conhecidos, e comumente utilizados, podem ser distribuídos por
processo :
Processos de Manufatura
Lineares - Pistões de simples e dupla ação.
Rotativos - Motores pneumáticos.
Se o acionamento é bastante simples, comandado por eletroválvulas que controlam os fluxos de ar
no sistema, controlando os movimentos, o controle neste tipo de atuador se restringe ao comando
destas válvulas e seu acionamento requer apenas drives para estes reles. As principais
características deste tipo de acionamento são o baixo peso e a baixa manutenção.
Processos Contínuos
Em processos contínuos, a válvula de controle é um atuador capaz de regular a vazão de um fluído
(líquido, gás ou vapor) que escoa através de uma tubulação, por meio do posicionamento relativo
de um obturador que obstrui a área livre de passagem do fluído.
Nestas válvulas a atuação é feita, na maioria das vezes, por dispositivos pneumáticos, por isto são
chamadas também de válvulas de controle pneumáticas.
Hidráulicos: Utilizam fluido líquido para realizar a atuação. Este fluido pode de
água, óleo mineral, etc. Ex: Pistões hidráulicos, válvulas hidráulicas, etc.
São utilizados principalmente em sistemas onde são requeridos elevados torques, sobretudo no
acionamento de máquinas de grande porte e em robôs de alta velocidade de posicionamento. Assim
como no caso dos atuadores pneumáticos, estes podem ser lineares (pistão simples ou dupla ação)
ou rotativos (motores hidráulicos).
Seu acionamento, assim como no caso dos pneumáticos, é bastante simples, comandado por
eletroválvulas que controlam os fluxos de óleo do sistema, controlando os movimentos. O controle
neste tipo de atuador se restringe ao comando destas válvulas e seu acionamento requer apenas
circuitos de controle (drives) para estes reles.
Características
•
Alto torque desenvolvido;
38
SIBRATEC
•
•
•
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Alta relação torque/peso;
Alta performance;
Baixa manutenção.
Figura 5.2: Vista em corte de um cilindro hidráulico
Atuadores Elétricos
Este tipo de atuador é o mais empregado em aplicações industriais de uma forma geral. As
facilidades de instalação, os baixos custos de instalação e o desenvolvimento de drives eletrônicos
para seu acionamento fizeram deste tipo de atuador o mais popular, não apenas em uso industrial,
mas também para uso geral.
Aplicações
•
•
•
•
•
•
•
Bombas;
Válvulas de controle (atuador elétrico);
Eixos de máquinas ferramenta;
Articulações de Robôs;
Esteiras;
Damper ou abafador de caldeiras;
etc.
Tipos de atuadores elétricos
Motor de passo
Devido à simplicidade do acionamento admitido por este tipo de motor, foi o acionamento mais
utilizado para controle de posicionamento em máquinas-ferramenta, até o final da década de 70.
Atualmente eles estão caindo em desuso devido à redução dos custos e das dificuldades de
acionamento dos demais tipos de motores.
Suas características gerais são:
•
Baixo Torque;
•
Acionamento simples;
39
SIBRATEC
•
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Baixa relação peso/potência.
Mesmo com algumas características não muito favoráveis, foi muito utilizado, pois a simplicidade
do controle de seu acionamento compensavam suas limitações. São comumente utilizados, hoje,
em sistemas que operam e malha aberta, não exigindo a presença de sensores ou controladores
mais elaborados. Sua maior aplicação está em periféricos para informática.
40
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 5.3: Especificações técnicas de um motor de passo
Motor de corrente contínua
O desenvolvimento da microeletrônica e da eletrônica de potência viabilizou o acionamento de
outros tipos de motores elétricos além dos motores de passo.
Tendo um desempenho muito superior ao motor de passo, o motor CC o substituiu em algumas
aplicações , pois seu acionamento e controle também são bastante simples.
41
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
42
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 5.4: Especificações técnicas de um motor de corrente contínua
Motor de corrente alternada síncrono
As inovações construtivas destes motores possibilitaram a sua utilização em acionamentos que até
então eram desenvolvidos para motores CC.
Estas inovações também determinaram o barateamento e o aumento de eficiência dos acionamentos
aplicados a este tipo de motor.
43
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
44
SIBRATEC
Rua Princesa Isabel, 129 - 89160-000 - Rio do Sul/SC
Fone/Fax: (47) 3521 2986 - Email/MSN: [email protected]
Skype: cca_materiais_eletricos - Site: www.cca.ind.br
Figura 5.5: Especificações técnicas de um motor síncrono
Motor de corrente alternada assíncrono (de indução)
Este tipo de motor é largamente utilizado em acionamentos onde controles de velocidade e
posicionamento não são requeridos, devido ao seu baixo custo e robustez.
O desenvolvimento de novas técnicas e dispositivos para acionamento destes motores, abrem uma
perspectiva para sua utilização também em acionamentos de máquinas-ferramenta, como também
em qualquer sistema de controle de posicionamento ou velocidade. Atualmente a maioria dos
equipamentos de comando numérico se utilizam de motores CA acionados pelos chamados
inversores de freqüência.
45