PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS
Programa de Pós-Graduação em Engenharia Elétrica
ARMANDO SOUZA GUEDES
Análise da Técnica de Modos Deslizantes no
Acionamento de Máquinas de Indução com
Implementação em DSP
Belo Horizonte
Abril de 2010
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS
Programa de Pós-Graduação em Engenharia Elétrica
ARMANDO SOUZA GUEDES
Análise da Técnica de Modos Deslizantes no
Acionamento de Máquinas de Indução com
Implementação em DSP
Trabalho apresentado ao Programa de Pós-Graduação em
Engenharia Elétrica da Pontifícia Universidade Católica de
Minas Gerais como parte dos requisitos para obtenção do
Título de Mestre em Engenharia Elétrica.
Orientadora: Profa. Dra. Zélia Myriam Assis Peixoto
Belo Horizonte
Abril de 2010
FICHA CATALOGRÁFICA
Elaborada pela Biblioteca da Pontifícia Universidade Católica de Minas Gerais
G924a
Guedes, Armando Souza
Análise da técnica de modos deslizantes no acionamento de máquinas de
indução com implementação em DSP / Armando Souza Guedes. Belo Horizonte,
2010.
128f.: il.
Orientadora: Zélia Myrian Assis Peixoto
Dissertação (Mestrado) - Pontifícia Universidade Católica de Minas
Gerais. Programa de Pós-Graduação em Engenharia Elétrica
1. Máquinas elétricas de indução. 2. Controle em modos deslizantes. 3.
Inversores elétricos. 4. Processamento de sinais – Técnicas digitais. I. Peixoto,
Zélia Myrian Assis. II. Pontifícia Universidade Católica de Minas Gerais.
Programa de Pós-Graduação em Engenharia Elétrica. III. Título.
CDU: 681.3.097
Aos meus pais:
Armindo e Anizelina
A minha esposa:
Camila
Aos meus irmãos:
Arian, Armindo e Amanda.
Agradecimentos
Primeiramente, agradeço a Deus por me conceder saúde e empenho nesta difícil jornada.
À minha linda e compreensível esposa Camila.
À professora Zélia Myriam Assis Peixoto pela orientação deste trabalho, dedicação e incentivo.
Aos professores, funcionários e amigos do Programa de Pós-Graduação em Engenharia Elétrica
da PUC-MG pelo apoio nos momentos difíceis.
Aos meus pais, Armindo e Anizelina, pelo apoio e perseverança.
Aos meus colegas, professores e funcionários do SENAI – CETEM / Betim, que tanto se
empenharam na aquisição de equipamentos para o desenvolvimento experimental deste projeto.
Aos colegas da COMAU do Brasil que disponibilizaram tempo e apoio para realização do
trabalho.
Armando Souza Guedes
Resumo
Neste trabalho é apresentada a técnica de controle de velocidade em modos deslizantes para a
máquina de indução. Comumente, o controle de velocidade das máquinas de indução, em
particular do MIT (Motor de Indução Trifásico), utiliza o controle vetorial por orientação indireta
do fluxo do rotor. Este modo de controle é extremamente dependente dos parâmetros físicos do
motor de tal forma que variações ou erros na estimativa destes valores podem comprometer o
desempenho dos sistemas de controle de velocidade/posição através destas máquinas. A técnica
de controle em modos deslizantes é uma proposta no sentido de se eliminar/minimizar esta
limitação dos sistemas de controle clássicos do motor de indução. A técnica de controle em
modos deslizantes é robusta às variações paramétricas e aos distúrbios de carga intrínsecos de um
sistema de acionamento de corrente alternada de alto desempenho. Neste trabalho, a partir de
uma breve revisão bibliográfica sobre o tema, são apresentadas as bases teóricas fundamentais
sobre o controle vetorial do MIT e a teoria dos modos deslizantes. Neste contexto, destaca-se o
projeto das superfícies de chaveamento para o controle de velocidade, a determinação dos ganhos
de chaveamento e da constante de tempo de convergência e o chattering intrínseco aos modos
deslizantes. A seguir, descreve-se um método para a síntese das tensões de referência através da
técnica de modulação por largura de pulso por vetor espacial. Para fins de validação, são
apresentados resultados da aplicação da técnica de modos deslizantes no controle de velocidade
do MIT a partir de simulações em ambiente MatLab e através da implementação do sistema de
controle utilizando-se um processador digital de sinais, o DSP dsPIC30F3011 fabricado pela
Microchip. Os resultados experimentais e de simulação comprovam a robustez e o bom
desempenho do sistema de controle de velocidade da máquina de indução pela associação das
técnicas de controle vetorial e modos deslizantes.
Abstract
This work presents the technique of speed control in sliding mode for induction machine.
Commonly the speed control of induction machines, in particular the IM (Induction Motor), is
based on the vector control with indirect orientation of the rotor flux. This technique control is
highly dependent on the physical parameters of the machine, so that variations or errors in the
estimation of these values may compromise the performance of the speed control / position
through
the
machine.
The
control
technique
using
sliding
mode
aims
the
elimination/minimization of this limitation of classical control systems algorithms for induction
motors. The technique of control in sliding mode is robust to parametric variations and
disturbances of intrinsic load of a drive system of alternating current of high performance. This
work, from a brief literature review on the subject, presents the fundamental theoretical basis of
the vector control of IM and the theory of sliding mode. In this context, we present the design of
switching surfaces for speed control, determining the switching gains and the time constant of
convergence and chattering intrinsic to the sliding mode. The following describes a method for
the synthesis of reference voltages using the technique of modulation of pulse width space vector.
For verification purposes are presented results of applying the technique of sliding mode speed
control in IM through simulations in MatLab environment, and through the implementation of the
control system developed using a digital signal processor, DSP dsPIC30F3011, manufactured by
Microchip. The experimental results and simulations demonstrating the robustness and good
performance of the speed control of induction machine by association techniques for vector
control and sliding mode.
Sumário
Lista de Figuras ............................................................................................................................. v
Lista de Tabelas ............................................................................................................................ ix
Lista de Abreviaturas.................................................................................................................... x
1 Introdução ................................................................................................................................... 1
1.1 Relevância ..................................................................................................................... 1
1.2 Objetivos........................................................................................................................ 3
1.3 Materiais e Métodos ...................................................................................................... 3
1.4 Organização do Trabalho............................................................................................... 4
1.5 Conclusão ...................................................................................................................... 5
2 Revisão Bibliográfica.................................................................................................................. 6
2.1 Introdução...................................................................................................................... 6
2.2 Controle Vetorial das Máquinas de CA......................................................................... 7
2.3 Modos Deslizantes....................................................................................................... 12
2.4 Conclusão .................................................................................................................... 19
3 Fundamentos Teóricos ............................................................................................................. 20
3.1 Introdução.................................................................................................................... 20
3.2 Modelagem da Máquina de Indução ........................................................................... 20
3.3 Controle Vetorial por Orientação Indireta de Campo ................................................. 23
3.3.1 Equações para o Controle Vetorial .................................................................... 24
3.3.2 Técnicas de Chaveamento de Inversores........................................................... 27
3.4 Fundamentos Teóricos Básicos sobre a Técnica de Modos Deslizantes..................... 33
i
3.4.1 Um Breve Histórico........................................................................................... 33
3.4.2 Definições e Conceitos Básicos......................................................................... 34
3.4.3 Um Simples Exemplo de Aplicação .................................................................. 37
3.4.4 Controle em Modos Deslizantes na Forma Canônica........................................ 40
3.4.5 Controle em Modos Deslizantes pelo Método de Fillipov ................................ 41
3.4.6 Controle em Modos Deslizantes pelo Método do Controle Equivalente .......... 42
3.4.7 Robustez dos Modos Deslizantes ...................................................................... 43
3.5 Conclusão .................................................................................................................... 44
4 Projeto dos Controladores em Modos Deslizantes ................................................................ 45
4.1 Introdução.................................................................................................................... 45
4.2 A Técnica de Modos Deslizantes Aplicada ao Controle de Velocidade do Motor de
Indução .............................................................................................................................. 46
4.2.1 Superfície de Fluxo Magnético.......................................................................... 48
4.2.2 Superfície de Velocidade................................................................................... 50
4.2.3 Projeto da Superfície da Componente em Quadratura da Corrente de Estator.. 52
4.3 Técnicas para a Redução do Chattering ...................................................................... 53
4.3. Inclusão de Filtros Passabaixas ........................................................................... 54
4.3.2 Substituição do Relé Ideal por uma Função do Tipo Saturação........................ 55
4.3.3 Uso do Termo Integral na Saída do Controlador em Modos Deslizantes ......... 56
4.3.4 Região de Fronteira de Largura Ajustável......................................................... 57
4.4 Estudo da Dinâmica do Motor de Indução em Modos Deslizantes............................. 57
4.5 Conclusão .................................................................................................................... 60
5 Resultados de Simulações ........................................................................................................ 61
5.1 Introdução.................................................................................................................... 61
ii
5.2 Determinação dos Ganhos de Chaveamento e Constante de Tempo .......................... 62
5.3 Resultados de Simulação ............................................................................................. 63
5.3.1 Controle Vetorial com Controladores PI para o Fluxo e a Velocidade do Rotor
.................................................................................................................................... 63
5.3.2 O Controle Vetorial em Modos Deslizantes aplicado à Máquina de Indução... 66
5.3.3 Controle Vetorial em Modos Deslizantes com Filtro Passabaixas na Saída da
Superfície de Velocidade............................................................................................ 71
5.3.4 Controle Vetorial em Modos Deslizantes com Termo Integral na Superfície de
Corrente em Quadratura e Utilização de Função Tipo Saturação .............................. 74
5.4 Conclusão .................................................................................................................... 76
6 Resultados Experimentais........................................................................................................ 77
6.1 Introdução.................................................................................................................... 77
6.2 Estrutura do Protótipo.................................................................................................. 78
6.3 Resultados Experimentais ........................................................................................... 81
6.4 Conclusão .................................................................................................................... 88
Conclusão e Propostas de Continuidade ................................................................................... 89
Referências Bibliográficas .......................................................................................................... 91
Anexo A ........................................................................................................................................ 94
Dados de Placa e Parâmetros da Máquina:........................................................................ 94
Apêndice A ................................................................................................................................... 95
Circuito da Interface de Potência Projetada ...................................................................... 95
Apêndice B ................................................................................................................................... 96
O Modelo Bifásico do Motor de Indução Trifásico .......................................................... 96
B.1 Vetor Espacial de Força Magnetomotriz, Corrente e Tensão de Estator ............. 98
iii
B.2 Vetor Espacial de Força Magnetomotriz, Corrente e Tensão de Rotor ............. 102
B.3 Equações de Tensão e Corrente do Motor de Indução no Referencial dq0 ....... 107
iv
Lista de Figuras
Figura 2. 1 – Diagrama de blocos simplificado do controle MRAC............................................. 10
Figura 2. 2– Diagrama de blocos do controle de por modelo de referência adaptativo com
estimação da velocidade e resistência rotórica. ............................................................................. 11
Figura 2. 3 – Sistema de controle de velocidade de uma máquina síncrona através da técnica de
controle vetorial com estimação de velocidade, posição do rotor e fcem por modos deslizantes. 14
Figura 2. 4 – Diagrama de blocos da aplicação do controle e observador em modos deslizantes
em tempo discreto.......................................................................................................................... 15
Figura 2. 5 – Diagrama de blocos do controlador em modos deslizantes com modelo de referência
adaptativo. ..................................................................................................................................... 17
Figura 2. 6 – Diagrama de blocos para o controlador e observador em modos deslizantes em um
sistema de acionamento de um motor de indução. ........................................................................ 18
Figura 3. 1 – Máquina de indução bifásica.................................................................................... 21
Figura 3. 2 – Diagrama do controle vetorial, orientado segundo o vetor fluxo magnético do rotor.
....................................................................................................................................................... 25
Figura 3. 3 – Inversor trifásico em ponte com carga genérica ...................................................... 27
Figura 3. 4 – Inversor trifásico ideal ............................................................................................. 28
Figura 3. 5 – Sinais de comando e tensão fase-neutro................................................................... 30
Figura 3. 6 – a) Representação dos vetores espaciais formados a partir das combinações das
chaves. b) Hexágono definido no plano αβ0 pelas projeções dos vetores espaciais. .................... 31
Figura 3. 7 – Saídas típicas de um inversor trifásico com controle por PWM por vetor espacial. 33
Figura 3. 8 – Modos deslizantes na interseção das superfícies s1(x) e s2(x) .................................. 36
Figura 3. 9 – Regiões definidas pela lógica de chaveamento........................................................ 38
Figura 3. 10 – Planos de fase para os subsistemas I e II . ............................................................ 38
Figura 3. 11 – Plano de fase resultante a partir da aplicação da lei de chaveamento.................... 39
Figura 3. 12 – Representação da dinâmica média do método de Fillipov sobre uma superfície de
chaveamento. ................................................................................................................................. 42
Figura 4. 1 – Controlador em modo deslizante proposto para a superfície de fluxo..................... 49
Figura 4. 2 – Controlador em modos deslizantes proposto para a superfície de velocidade......... 52
v
Figura 4. 3 - Controlador em modos deslizantes proposto para a componente em quadratura da
corrente de estator.......................................................................................................................... 53
Figura 4. 4 – Convergência para os modos deslizantes com a função de saturação. .................... 56
Figura 5. 1 – a) Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle PI a 1800rpm............................................................................................... 64
Figura 5. 2 – a) Conjugado eletromagnético. b) Corrente de estator de eixo alfa (α). c) Corrente
de estator de eixo beta (β). Ambos com controle PI a 1800rpm. .................................................. 64
Figura 5. 3 – Tensão de estator da fase A sintetizada pelo inversor com controle PI a 1800rpm. 65
Figura 5. 4 – a )Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle PI a 900rpm................................................................................................. 65
Figura 5. 5 – a) Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle PI a 300rpm................................................................................................. 66
Figura 5. 6 – Diagrama de blocos do controle de velocidade em modos deslizantes para o motor
de indução...................................................................................................................................... 67
Figura 5. 7 – a) Variação de carga. b) Conjugado eletromagnético do motor. c) Corrente de
estator na fase A. d) Velocidade do motor. Com controle em modos deslizantes a 1800rpm. ..... 68
Figura 5. 8 – Trajetória da superfície de velocidade para o controle em modo deslizante. .......... 68
Figura 5. 9 – Detalhe das oscilações na velocidade no controle em modos deslizantes quando sem
carga............................................................................................................................................... 69
Figura 5. 10 – Detalhe das oscilações na velocidade no controle em modos deslizantes quando
inserida a carga. ............................................................................................................................. 70
Figura 5. 11 – Resposta de velocidade com carga nominal e 20% de variação nas resistências do
estator e rotor, a 1800rpm.............................................................................................................. 70
Figura 5. 12 – a) Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle em modos deslizantes a 300rpm. ................................................................ 71
Figura 5. 13 – a) Variação de carga. b) Corrente de estator da fase A. c) Velocidade do motor.
Ambos com controle em modos deslizantes com uso do filtro passabaixas, a 1800rpm. ............. 72
Figura 5. 14 – Detalhe do chattering do controle em modos deslizantes com uso do filtro
passabaixas, a 1800rpm. ................................................................................................................ 73
Figura 5. 15 – Trajetória da superfície de velocidade para o controle em modos deslizantes com
uso de um filtro passabaixas, a 1800rpm....................................................................................... 73
vi
Figura 5. 16 – a) Variação de carga. b) Corrente de estator da fase A. c) Velocidade do motor.
Ambos com controle em modos deslizantes, incluindo o relé de saturação com termo integral. . 74
Figura 5. 17 – Detalhe do chattering com o controle em modos deslizantes, incluindo o relé de
saturação com termo integral, a 1800rpm. .................................................................................... 75
Figura 5. 18 – Trajetória da superfície de velocidade para o controle em modos deslizantes,
incluindo o relé de saturação com termo integral, a 1800rpm....................................................... 75
Figura 6. 1 – Kit EasydsPIC4 de desenvolvimento utilizado na montagem experimental [39].... 78
Figura 6. 2 – Drive IRAMS10UP60A [40]. .................................................................................. 79
Figura 6. 3 – Foto do protótipo e detalhe da placa de interface projetada..................................... 80
Figura 6. 4 – Diagrama de blocos da estrutura do protótipo ......................................................... 81
Figura 6. 5 – Uso de controladores PI: Corrente estator da fase A (canal 2) e velocidade do rotor
(canal 1- 450rpm/volt), com velocidade de referência igual a 250rpm e carga nula. ................... 82
Figura 6. 6 – Uso de controladores PI: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1 - 450rpm/volt), com velocidade de referência igual a 1800rpm e carga nula......... 82
Figura 6. 7 - Uso de controladores PI: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1- 450rpm/volt), com velocidade de referência igual a 900rpm e carga nula............ 83
Figura 6. 8 - Uso de controladores PI: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1- 450rpm/volt), com velocidade de referência igual a 1800rpm: Inclusão de carga de
0,67Nm. ......................................................................................................................................... 83
Figura 6. 9 – Uso de controladores MD: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1- 450rpm/volt), com velocidade de referência igual a 900rpm: Inclusão de carga de
0,67Nm. ......................................................................................................................................... 84
Figura 6. 10 – Uso de controladores MD: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1 - 450rpm/volt), com velocidade de referência igual a 1800rpm: Efeitos da inclusão
e exclusão da carga de 0,67Nm. .................................................................................................... 84
Figura 6. 11 – Uso de controladores MD: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1 - 450rpm/volt), com velocidade de referência igual a 250rpm e carga nula........... 85
Figura 6. 12 – Controlador MD: Corrente de estator da fase A (canal 2) e velocidade (canal 1 450rpm/volt) a 900rpm, sem carga e variação das resistências do rotor e do estator. .................. 85
Figura 6. 13 – Controlador MD modificado: Corrente de estator da fase A (canal 2) e velocidade
(canal 1 - 450rpm/volt) a 250rpm, sem carga................................................................................ 86
vii
Figura 6. 14 – Controlador MD modificado: Corrente de estator da fase A (canal 2) e velocidade
(canal 1 - 450rpm/volt) a 900rpm, com carga de 0,67Nm. ........................................................... 86
Figura 6. 15 – Controlador MD modificado: Corrente de estator da fase A (canal 2) e velocidade
(canal 1 - 450rpm/volt) a 1800rpm com carga de 0,67Nm. .......................................................... 87
Figura 6. 16 – a) Detalhe do chattering na velocidade (canal 1) e corrente (canal 2) para o
controle em MD. b) Detalhe do chattering na velocidade (canal 1) e corrente (canal 2) para o
controle em MD modificado.......................................................................................................... 87
Figura 6. 17 – Tensão fase-fase sintetizada pelo inversor............................................................. 88
viii
Lista de Tabelas
Tabela 3.1 – Estados das chaves de um braço do inversor de dois níveis..................................... 28
Tabela 3. 2 – Sinais de comando e tensão de saída do inversor. ................................................... 30
Tabela 6. 1 – Ganhos e parâmetros dos controladores. ................................................................. 82
ix
Lista de Abreviaturas
B
Coeficiente de atrito viscoso (Nms/rad).
c(k)
Vetor de comando de uma chave Sx.
cv
Constante de tempo da superfície de velocidade (s).
dq0
Sistema de coordenadas fixo no rotor.
EPROM
Erase Programable Read Only Memory.
FIR
Resposta ao Impulso Finita (Finite Impulse Response)
fr(α,t)
Força magnetomotriz do rotor no referencial do αβ0 (Ae).
fs(θ,t)
Força magnetomotriz do estator no referencial αβ0 (Ae).
IIR
Resposta ao Impulso Infinita (Infinite Impulse Response).
IO
Entrada-Saída (Input-Output)
ird
Componente de eixo direto da corrente do rotor (A).
irq
Componente em quadratura da corrente do rotor (A).
isd
Componente de eixo direto da corrente do estator (A).
isq
Componente em quadratura da corrente do estator (A).
J
Momento de inércia (Nms2/rad).
kd
Ganho de chaveamento da superfície de chaveamento do fluxo.
ki
Ganho de chaveamento da superfície de chaveamento da corrente em quadratura.
kq
Ganho de chaveamento da superfície de chaveamento velocidade.
Lm
Indutância mútua (H).
Lr
Indutância própria do rotor (H).
Lrl
Indutância de dispersão do rotor (H).
Ls
Indutância própria do estator (H).
Lsl
Indutância de dispersão do estator (H).
x
p
Número de pares de polos.
PWM
Modulação por largura de pulsos (Pulse Width Modulation)
RAM
Random Access Memory.
Rr
Resistência do enrolamento do rotor (Ω).
Rs
Resistência do enrolamento do estator (Ω).
s(x,t)
Superfície de chaveamento genérica.
Sgn
Função sinal.
Syx
Representação geral de uma chave num braço do inversor.
T
Período de PWM (s).
Te
Conjugado eletromagnético do motor (Nm).
TL
Conjugado da carga (Nm).
TTL
Lógica Transistor-Transistor (Transistor-Transistor Logic)
urd
Componente de eixo direto da tensão do rotor (V).
urq
Componente em quadratura da tensão do rotor (V).
usd
Componente de eixo direto da tensão do estator (V).
usq
Componente em quadratura da tensão do estator (V).
αβ0
Sistema de coordenadas fixo no estator.
αr
Ângulo entre fr(α,t) e o sistema de coordenadas dq0 (rad).
αr'
Ângulo entre fr(α,t) e o sistema de coordenadas αβ0 (rad).
∆
Largura de faixa para função tipo saturação (rad/s).
λrd
Componente de eixo direto do fluxo do rotor (Wb).
λrq
Componente em quadratura do fluxo do rotor (Wb).
λsd
Componente de eixo direto do fluxo do estator (Wb).
λsq
Componente em quadratura do fluxo do estator (Wb).
xi
θr
Ângulo entre os sistemas de coordenadas αβ0 e dq0 (rad).
θm
Posição mecânica do rotor (rad).
τ(k)
Tempo ou largura do pulso em que uma chave Sx permanece ligada em um T (s).
ωc
Frequência de corte do filtro passabaixa (rad/s).
ωm
Velocidade mecânica (rad/s).
ωr
Velocidade angular do fluxo do rotor (rad/s).
ωs
Velocidade angular síncrona do fluxo do estator (rad/s).
ωsl
Velocidade angular de escorregamento (rad/s).
Subscritos
abc
Relativo as fases a, b ou c.
d
Referente ao eixo direto fixo no rotor.
eq
Entrada de controle equivalente.
q
Referente ao eixo em quadratura fixo no rotor, 90o adiantado em relação ao eixo d.
α
Referente ao eixo direto fixo no estator.
β
Referente ao eixo quadratura fixo no estator, 90o adiantado em relação ao eixo α.
r
Referente ao rotor.
s
Referente ao estator.
Sobrescritos
*
Valor de referência de uma variável ou valor de uma entrada calculada pelo
algoritmo de controle.
¯
Referente a um vetor ou ao valor médio de uma variável.
˙
Referente à derivada de variável no espaço de estados.
^
Referente a um valor estimado de uma variável.
xii
CAPÍTULO 1. INTRODUÇÃO
1
Capítulo 1
Introdução
O surgimento da técnica de controle vetorial, aliada ao aumento da disponibilidade de
microprocessadores e chaves eletrônicas de potência, vem possibilitando a crescente utilização da
máquina de indução em sistemas de acionamento elétrico de alto desempenho.
Em suas versões originais, as técnicas de controle vetorial direto ou por orientação indireta de
campo, são altamente dependentes dos parâmetros físicos da máquina. Neste sentido, uma
técnica de controle que possa oferecer robustez aos distúrbios de carga e às variações de
parâmetros, é de fundamental importância para os sistemas de acionamento elétrico de alto
desempenho através de máquinas de corrente alternada (c.a.). Alternativas promissoras podem ser
encontradas entre os sistemas de estrutura variável (SEV), em particular, os sistemas de controle
em modos deslizantes, que agregam aos sistemas de controle de velocidade/posição justamente as
características de invariância paramétrica e de carga desejadas.
1.1 Relevância
A partir de 1970, com o intuito de se elevar a produtividade e reduzir as perdas de energia
envolvidas nos processo de produção, os sistemas de acionamento, até então eletromecânicos,
começaram a ser substituídos por circuitos de comando baseados na eletrônica de potência [1].
Estatísticas apresentadas em meados da década de 90 apontavam, por exemplo, que o uso de
acionamentos eletrônicos em motores de indução, cerca de 10 a 20% dos acionamentos utilizados
na época, deveria crescer entre 50 a 60% até o ano de 2010 [2].
Os acionamentos à velocidade variável eram preferencialmente realizados por motores de
corrente contínua devido ao controle independente do fluxo magnético do campo e da corrente de
armadura, o que possibilita o controle linear do conjugado eletromagnético [4][5][6].
CAPÍTULO 1. INTRODUÇÃO
2
A redução de custos, aliada ao aumento da disponibilidade de dispositivos eletrônicos de potência
mais rápidos, possibilitou a implementação de estratégias escalares de controle de motores c.a. no
processo de substituição dos motores c.c.. Entretanto, ainda não havia uma teoria que pudesse
adequar o motor c.a. a um acionamento de frequência variável com desempenho próximo ou
igual ao dos motores c.c. [7].
Somente com a apresentação do princípio de controle por orientação de campo em 1972, por
Blaschke [8], foi possível o desenvolvimento das técnicas de controle vetorial de motores c.a..
Persistiam, porém, limitações quanto à sua aplicação prática, uma vez que a técnica de orientação
de campo previa cálculos complexos como conversão de sistemas de coordenadas móveis,
utilizando equações simplificadas do modelo matemático do motor.
Somente a partir da evolução da eletrônica de potência e do desenvolvimento dos
microprocessadores, a implementação do controle vetorial para máquinas c.a. tornou-se possível.
Embora apresentem desempenho satisfatório, novas pesquisas buscam solucionar a principal
limitação destas técnicas em relação à dependência dos parâmetros físicos das máquinas [5].
Como uma das principais alternativas da atualidade, através das técnicas de controle robusto, as
máquinas c.a. são aplicadas em sistemas que exigem alto grau de precisão e desempenho em
relação ao controle de velocidade, posição e conjugado [5].
Dentre os algoritmos de controle robusto, encontra-se a técnica de modos deslizantes, que possui
como principais características a robustez em relação às incertezas paramétricas e aos distúrbios
externos de carga [10][17][35].
Neste trabalho, foi investigado e aplicado a teoria do controle vetorial de máquinas de c.a., em
especial para os motores de indução com rotor em gaiola de esquilo, utilizando-se a técnica de
controle em modos deslizantes, com implementação através de um processador digital de sinais,
o DSP dsPIC30F3011 da Microchip.
CAPÍTULO 1. INTRODUÇÃO
3
1.2 Objetivos
O principal objetivo deste trabalho é a análise e desenvolvimento de um sistema de controle de
velocidade do motor de indução, através das técnicas de controle vetorial e de modos deslizantes,
com implementação via processador digital de sinais, abordando técnicas para amenização dos
efeitos do chattering.
Pode-se apresentar ainda, como objetivos secundários deste trabalho, a implementação do
controle vetorial do motor de indução utilizando o controlador proporcional-integral (PI) via
DSP, a fim de possibilitar comparações com o controle em modos deslizantes e, o estudo e
implementação da técnica de chaveamento do inversor trifásico por vetores espaciais de tensão.
1.3 Materiais e Métodos
Inicialmente foi realizada uma revisão bibliográfica que permitiu situar o estado da arte em
relação à aplicação de técnicas de controle robusto em sistemas de acionamento elétrico através
da máquina de indução trifásica. A partir daí, foi selecionada a técnica de modos deslizantes e
realizados os estudos necessários para fins do projeto do sistema, basicamente, a técnica de
controle vetorial e métodos para a seleção e determinação de superfícies e ganhos para o controle
em modos deslizantes.
A etapa seguinte envolveu a simulação do sistema de controle de velocidade em ambiente
MatLab. A simulação permitiu a aquisição dos dados para avaliação e comparação de resultados
entre o controle vetorial da máquina de indução através de controladores proporcional-integral
(PI) e utilizando os modos deslizantes.
Com base na metodologia aplicada na etapa de simulação, foi realizado o desenvolvimento
prático do projeto, que envolveu a implementação experimental no DSP dsPIC30F3011 da
Microchip e o drive de potência IRAMS10UP60A fabricado pela IRF.
Para fins de validação, foram analisados os resultados obtidos através de simulações e da
montagem experimental, em ambos os experimentos, incluindo a variação de parâmetros da
máquina e distúrbios de carga.
CAPÍTULO 1. INTRODUÇÃO
4
1.4 Organização do Trabalho
O trabalho está estruturado em seis capítulos, sendo que o primeiro consta da apresentação geral
do tema da pesquisa, sua relevância e justificativa no contexto atual.
O segundo capítulo apresenta uma revisão bibliográfica sobre os métodos de controle robusto,
mencionando as suas principais vantagens e desvantagens. Foram apresentados, ainda, alguns
trabalhos que tratam da utilização dos modos deslizantes como observadores de estado. Este
capítulo foi dividido em duas seções onde são abordados os métodos de controle robusto e, em
particular, o controle em modos deslizantes.
No capítulo 3, são apresentados os fundamentos teóricos do controle vetorial da máquina de
indução por orientação indireta de campo e da técnica de modulação por largura de pulso por
vetor espacial. Em outra seção do capítulo, trata-se da teoria dos modos deslizantes, destacandose os aspectos relativos à convergência, escolha e projeto das superfícies de controle e o efeito do
chattering.
O capítulo 4 trata, especificamente, da aplicação da técnica de modos deslizantes no controle de
velocidade do motor de indução. São desenvolvidas as equações para o cálculo dos ganhos de
chaveamento e constante de tempo de convergência para uma superfície de primeira ordem.
Também são mencionadas algumas formas de diminuição do chattering.
O capítulo 5 apresenta os resultados obtidos através de simulação em ambiente MatLab. Na
primeira seção encontram-se os cálculos dos ganhos do controlador em modos deslizantes. Nas
seções subsequentes são apresentados os resultados para o controle de velocidade do motor
utilizando o controlador PI e em modos deslizantes.
Finalmente, no capítulo 6 são mostrados os resultados experimentais. As etapas e características
da montagem são apresentadas, bem como as respostas de velocidade para diversas condições de
carga para o controle PI e o controle em modos deslizantes.
CAPÍTULO 1. INTRODUÇÃO
5
1.5 Conclusão
Este capítulo teve como objetivo apresentar, em linhas gerais, o tema abordado nesta pesquisa,
mostrando sua relevância, justificativa e metodologia utilizada. Espera-se, a partir do exposto,
facilitar a leitura do texto permitindo que as diversas etapas possam ser avaliadas no contexto das
metas estabelecidas, previamente, para a realização do trabalho.
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
6
Capítulo 2
Revisão Bibliográfica
2.1 Introdução
Neste capítulo serão apresentados os resultados da revisão bibliográfica realizada, destacando
alguns dos métodos de controle utilizados no acionamento de máquinas de indução e correlatos
ao tema da pesquisa. Pretende-se investigar os estudos mais recentes, sobretudo os que utilizam a
técnica de modos deslizantes.
Inicialmente, serão apresentadas sínteses de alguns conceitos e estudos que tratam da aplicação
das técnicas de controle vetorial no acionamento de máquinas de indução.
Serão mostradas aplicações da técnica de modos deslizantes no projeto de controladores e de
observadores de estado. Outras técnicas de controle robusto, como o controle adaptativo por
modelo de referência [20][24]e de auto-sintonia também são mencionadas[9][15].
Uma associação de técnicas de controle robusto, como o controle adaptativo por modelo de
referência e a técnica de modos deslizantes são mencionados em algumas referências. Ainda,
serão mostrados alguns trabalhos que tratam da adaptação dos ganhos do controlador através da
lógica fuzzy [25].
Outro aspecto abordado na revisão bibliográfica são os métodos utilizados para a diminuição do
chattering, fenômeno inerente ao controle/observação de estados através da técnica de modos
deslizantes, que causa oscilações de alta frequência na resposta dos sistemas controlados [10].
Na organização do capítulo, a seção 2.2 mostra um breve histórico e revisão das técnicas de
controle vetorial em máquinas de corrente alternada. Na seção 2.3 é enfatizado o método de
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
7
modos deslizantes, em particular investigando as aplicações em controle. Por fim, a seção 2.4
apresenta as conclusões a partir da revisão bibliográfica.
2.2 Controle Vetorial das Máquinas de CA
Após a proposição do princípio de controle por orientação de campo em 1972, por Blaschke [8],
estavam lançadas as bases teóricas para o desenvolvimento das técnicas de controle vetorial de
motores c.a.. Inicialmente, grandes dificuldades limitaram a sua aplicação prática, uma vez que as
técnicas por orientação de campo envolvem cálculos complexos como conversão de sistemas de
coordenadas móveis, utilizando equações simplificadas do modelo matemático do motor.
O objetivo da técnica de controle por orientação de campo é o de produzir um desacoplamento
entre as grandezas que produzem o conjugado e o fluxo magnético, possibilitando controlar o
motor c.a. de forma semelhante ao motor c.c [4][5]. O controle por orientação de campo só foi
implementado, na prática, a partir de 1980, tornando-se, logo a seguir, economicamente viável
devido ao aumento da disponibilidade e redução do custo dos microprocessadores [2].
A técnica de controle de motores c.a. por orientação de campo é baseada nas equações
eletromagnéticas da máquina, representadas em um sistema de eixos de referência ortogonal dq0,
alinhado com um dos vetores de fluxo magnético da máquina. A escolha do vetor fluxo
magnético definirá as características e vantagens do método de controle por orientação de campo.
Usualmente, a orientação é realizada segundo o vetor de fluxo magnético de estator, de rotor ou
resultante no entreferro [4][5][6].
Atualmente, dois métodos são mais utilizados em sistemas de acionamento de motores c.a. de
alto desempenho, ambos utilizando o vetor fluxo magnético de rotor como referência do sistema
de eixos ortogonal dq0, cujas coordenadas são indicadas por direta (d) e em quadratura (q). O
primeiro, é conhecido como controle por orientação direta de campo (Direct Field Oriented
Control - DFOC), necessita do conhecimento do vetor fluxo magnético do rotor (módulo e
ângulo), usualmente, obtido através de sensores ou observadores de estados [12][13].
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
8
A segunda técnica é denominada controle por orientação indireta de campo (Indirect Field
Oriented Control - IFOC), onde o conhecimento da magnitude do vetor fluxo magnético do rotor
não é necessário. A partir do modelo matemático da máquina, é determinada a frequência angular
de escorregamento que, somada à velocidade angular do rotor, fornece o ângulo ou posição
espacial do vetor fluxo magnético do rotor a partir de sua integração no tempo
[4][5][6][13][15][27].
Apesar do controle orientado segundo o vetor fluxo magnético de rotor apresentar maior
empregabilidade, algumas referências tratam de estratégias de controle baseadas na orientação
segundo o vetor fluxo magnético do estator. Usualmente utiliza-se este método quando se
necessita de aplicações que requerem alta velocidade, obtendo-se alto conjugado eletromagnético
na região de enfraquecimento de campo da máquina. Demonstra-se redução do controle a
dependência de parâmetros, porém trata-se de um método com grau relativo de complexidade de
implementação [32].
Em se tratando de estratégias de controle, pode ser citada a técnica de Controle Direto de Fluxo e
de Conjugado (Direct Torque and Flux Control - DTFC), onde o fluxo e o conjugado
eletromagnéticos são controlados diretamente. Desta forma, a partir das exigências de conjugado
e de fluxo, as tensões e correntes são impostados de forma indireta para a máquina. Problemas
para condições de baixa velocidade e baixa carga são observadas para este método e descritas em
[13][16].
Outra estratégia é o Controle de Linearização por Realimentação (Feedback Linearization
Control - FLC), que consiste em realizar transformações com o objetivo de linearizar e
desacoplar as equações da máquina escritas nos sistemas de referência do estator ou rotor. As
variáveis, no caso a amplitude do vetor fluxo magnético e velocidade do rotor, são utilizadas
como os sinais de entrada de realimentação para o controle, que pode ser um tradicional PI
(Proporcional-Integral) ou outro tipo de controlador. Esta técnica requer uma estrutura complexa
de controle, exigindo grande esforço computacional, limitando seu uso na prática [16].
No controle de velocidade/posição de máquinas de c.a. podem ser utilizados controladores do
tipo proporcional-integral (PI) convencionais [13], algoritmos inteligentes baseados em lógica
fuzzy como abordados em [18] e, métodos de controle robusto como os controladores auto-
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
9
sintonizados (Self-Tuning) [9][15], controle adaptativo por modelo de referência (Model
Reference Adaptative Control - MRAC) abordados em [23][24][33] e técnicas baseadas na teoria
de controle de estrutura variável (VSC - Variable Structure Control) [5][21][22][25][28], dentre
outras.
Os controladores auto-sintonizados, ou de auto-sintonia contínua, aplicados em acionamentos de
motores de c.a., visam à atualização dos parâmetros elétricos da máquina variantes em função do
tempo, temperatura e/ou frequência durante o seu regime normal de funcionamento. Para realizálo, são utilizados algoritmos de estimação que levam em conta algum(s) sinal(s) de realimentação
do controle, como correntes, tensões, potência ativa ou reativa. Alguns destes algoritmos
realizam a estimativa on-line (durante o funcionamento da máquina), de forma que os cálculos do
fluxo magnético, conjugado, velocidade, etc, advindos de cálculos/transformadas tenham seu erro
minimizado [9][15]. Dependendo do algoritmo de estimação utilizado, esta técnica pode
apresentar grande robustez no conhecimento dos parâmetros do motor, podendo também ser
robusta a perturbações de carga quando inserido um observador de distúrbios [21], porém exigise um grande esforço computacional devido a sua complexidade.
Os Controladores Adaptativos por Modelo Referência (Model Reference Adaptative Control MRAC) são construídos a partir da resposta desejada para o modelo dinâmico da planta
(máquina, conversor e carga), assumindo-se seus parâmetros nominais. Aplicadas ao
acionamento de máquinas c.a., o MRAC retorna valores de parâmetros ao controle para que a
resposta desejada seja obtida [23][24][33].
O diagrama da Figura 2.1 ilustra de forma simples o controle MRAC. O método emprega a
comparação entre a saída do modelo de referência (ym) e a da planta (y). Através de um
mecanismo de adaptação, utilizando um método de gradiente ou aplicando a teoria de
estabilidade, são retornados os parâmetros corrigidos (θ) para o controlador de forma a se obter
ou manter a resposta desejada. O MRAC apresenta grande robustez a incertezas paramétricas e
carga, porém a dificuldade de sua implementação advém da determinação do mecanismo de
adaptação [24].
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
10
Figura 2. 1 – Diagrama de blocos simplificado do controle MRAC.
Na referência [23] é mostrada uma aplicação do controle adaptativo por modelo de referência em
um sistema de controle de velocidade sensorless, onde é incluída a estimação da resistência e
velocidade angular do rotor. As estimações utilizadas a partir do MRAC eliminam a necessidade
dos sensores eletromecânicos na técnica de controle vetorial por orientação indireta de campo.
Para sua realização foram consideradas as seguintes características no controle:
•
O fluxo magnético do rotor será constante e senoidal, não afetando o valor do conjugado;
•
No controle utilizado (Feedfoward Torque Control - FTC) não se utilizou realimentação
das correntes, excluindo ripples e/ou compensações das mesmas, controlando o
conjugado de forma direta;
•
O conjugado é controlado de forma independente do fluxo magnético do rotor.
Segundo os autores, além de se obter maior robustez em relação aos distúrbios da carga, a partir
das características mencionadas anteriormente, pode-se utilizar um estimador com um simples PI
para a velocidade do rotor. A Figura 2.2 apresenta o diagrama de blocos desta implementação.
11
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
Figura 2. 2– Diagrama de blocos do controle de por modelo de referência adaptativo com
estimação da velocidade e resistência rotórica.
Na estrutura de controle vista na Figura 2.2, têm-se os blocos de estimação de velocidade e
resistência do rotor, cujas equações são dadas respectivamente por:
Lr B 2 λ R
^
Rr =
*
Mpisd − p λ r +
Lr B 2
^
*
(2.1)
λr
Rr
onde:
*
λ r = λr [1 + A s en( Bt )]
ω m = K p λ r isq − isq + K i ∫ λ r i sq − isq dt
^
*
*
*
^
*
*
(2.2)
^
Nas equações 2.1 e 2.2 ω m , λ r e R r são, respectivamente, a velocidade mecânica, o fluxo
magnético do rotor e a resistência do rotor. A estimação da resistência é realizada a partir do
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
12
conhecimento do fluxo magnético do rotor, enquanto que a velocidade depende do fluxo e do
*
valor de i sq obtido do modelo de referência.
Dentre os controladores de estrutura variável, destacam-se as aplicações da técnica de modos
deslizantes, que apresentam como principais vantagens a rejeição às perturbações na variável
controlada, robustez às incertezas paramétricas e facilidade no controle de sistemas não lineares
[10][21][17][19]. As características, citadas anteriormente, tornam os modos deslizantes uma
técnica promissora no acionamento de máquinas de c.a. [10][17][24][28].
Apesar de seu emprego como técnica de controle em acionamentos de máquinas elétricas, os
modos deslizantes apresentam o fenômeno do chattering, intrínseco ao método, que pode causar
problemas de excitação em alta frequência e pequenas oscilações em torno do ponto de operação
desejado em regime permanente [10]. Vários estudos vêem sendo realizados no intuito de reduzir
os efeitos do chattering nos controladores de modos deslizantes, que serão abordados
posteriormente neste trabalho.
2.3 Modos Deslizantes
O conceito de Sistemas de Estrutura Variável foi introduzido por volta dos anos 50, pelos
pesquisadores russos S.V. Emel'yanov e A.I. Fedotova, considerando inicialmente a análise de
sistemas lineares de segunda ordem com realimentação do erro da saída e de sua derivada, onde a
entrada de controle poderia assumir um entre dois valores possíveis [10][17][35].
De 1962 a 1970, sistemas lineares de ordem superior, invariantes ou variantes no tempo,
começaram a ser analisados. Em geral, os sistemas eram modelados através de sua equação
diferencial de mais alta ordem com uma única entrada ou através de seu modelo equivalente, na
forma canônica controlável [10].
Para a compensação de distúrbios externos, eram usadas realimentações das variáveis de saída e
de suas derivadas, definindo-se as superfícies de chaveamento sempre no espaço canônico ou em
algum espaço estendido, através das saídas de filtros que realizavam as derivadas dos erros. Neste
período, vários estudos foram realizados com relação à existência da convergência e estabilidade
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
13
dos modos deslizantes, sistemas variantes no tempo, efeitos de perturbações externas, de
incertezas paramétricas e sistemas com variáveis de estado não-mensuráveis [10].
A partir de 1970 a teoria de Sistemas de Estrutura Variável foi estendida a uma grande variedade
de sistemas, incluindo o controle de sistemas de acionamentos elétricos, como decorrência
basicamente, da mudança do espaço canônico para um espaço de estados mais geral [10].
Os sistemas de estrutura variável podem ser vistos, genericamente, como um conjunto de
subsistemas contínuos associados a uma lógica de chaveamento apropriada, onde as ações de
controle são funções descontínuas do espaço de estados, distúrbios externos e entradas de
referência [10].
A técnica de modos deslizantes, como um dos métodos de controle de estrutura variável, consiste
em levar a variável de estado controlada a um tipo de movimento chamado de “modos
deslizantes”, onde a mesma fica “deslizando” sobre a trajetória de uma superfície projetada no
espaço de estados. Este movimento em torno da superfície de chaveamento proporciona as
características essenciais do controle em modos deslizantes, ou seja, a robustez em relação às
incertezas paramétricas e aos distúrbios externos [10][17][35].
Desde sua proposição, os controladores de estrutura variável vêm revelando um grande potencial
face aos novos problemas de controle, sobretudo com os recentes avanços na tecnologia dos
processadores digitais e chaves estáticas de potência. Observa-se um amplo espectro de estudos e
aplicações, incluindo os sistemas não-lineares [20] e sistemas de múltiplas entradas e saídas [29],
estudo da convergência dos modos deslizantes em sistemas com atraso de tempo [30], servosistemas [21], sistemas de acionamento elétrico [28] e observadores de estado [17][19][21][23].
Nas aplicações da técnica de modos deslizantes como observadores de estados, estudos como os
da referência [17] mostram sua utilização para estimação de grandezas como posição, velocidade
e força contra eletromotriz (fcem) de máquinas síncronas a imãs permanentes. Em [9], uma
pequena abordagem é feita em aplicações para motores de indução e, em [19] é mostrada uma
nova estrutura para observadores de estado com modos deslizantes, onde são estendidos e
modificados os algoritmos de Walcolt-Zak e Edwards-Sprugeon para sistemas não-lineares.
14
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
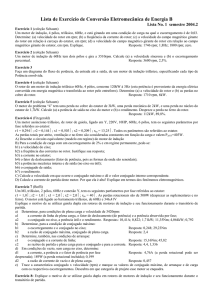
Na Figura 2.3 é apresentado um diagrama em blocos, que inclui o uso da técnica em modo
deslizante como observador de estado, para aplicação em sistemas de controle de
velocidade/posição de máquinas síncronas a imãs permanentes [17]. Neste diagrama o controle
de velocidade da máquina síncrona é feito por controladores PI e, os blocos de estimação de
fcem, θr e ωr são observadores em modos deslizantes. Os blocos F1 e F2 são funções no tempo
*
*
que geram as referências das correntes de eixo direto ( i q ) e em quadratura ( i d ), a primeira para o
controle de conjugado conforme as exigências da carga e, a segunda para garantir o fluxo
magnético constante no entreferro da máquina.
Figura 2. 3 – Sistema de controle de velocidade de uma máquina síncrona através da técnica de
controle vetorial com estimação de velocidade, posição do rotor e fcem por modos deslizantes.
Na referência [21] é vista uma aplicação para o controle de posição de um servomotor de c.c.
utilizando um controlador e um estimador em modos deslizantes. O motor é modelado como um
sistema de segunda ordem em tempo discreto. A Figura 2.4 ilustra, através de um diagrama de
blocos, a implementação deste método. Quando o distúrbio d afeta a saída y, é gerado um sinal q
^
que é somado a sua estimação q , este sinal gera um valor de compensação ureg2 pelo controlador
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
15
^
em modos deslizantes, quando os q= q (ocorrência ideal dos modos deslizantes) o distúrbio é
completamente compensado e a saída se mantém na referência (r) desejada.
Figura 2. 4 – Diagrama de blocos da aplicação do controle e observador em modos deslizantes
em tempo discreto.
As restrições na implementação da técnica de modos deslizantes advêm da exposição dos
sistemas aos efeitos do chattering, através do qual dinâmicas de alta frequência, negligenciadas
por ocasião da modelagem dos sistemas, podem ser excitadas [10][17]. Por outro lado, suas
características em relação às incertezas paramétricas e distúrbios internos e externos aos sistemas
permitem a realização de sistemas mais robustos e estáveis [19][21][28].
Altos valores para os ganhos de chaveamento são o principal fator para garantia da robustez do
controle em modos deslizantes. Porém os ganhos elevados contribuem significativamente para o
aumento do chattering [10]. Alguns estudos propõem a diminuição do chattering a partir da
adaptação do ganho de chaveamento conforme a condição de operação com o uso de estimadores
de carga através do controle adaptativo ou lógica fuzzy. Em outros, a proposta é a modificação da
lei de controle ou uso de filtros nas entradas das superfícies de chaveamento [37].
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
16
Contribuições importantes, como as citadas por Hung [10], que investigam formas de
implementação do controle em modos deslizantes, têm sido utilizadas com êxito em algumas
aplicações e gerado contribuições como em [25], que faz uso da técnica da sintonia fuzzy para a
diminuição do chattering. Este utiliza um mecanismo de inferência fuzzy que recalcula o ganho
de chaveamento de acordo com o erro entre a trajetória real da superfície de chaveamento e a
trajetória da superfície projetada. Desta forma, quando o erro é grande o ganho de chaveamento é
alto para acelerar a convergência para a superfície desejada e, quando o erro é baixo o ganho será
menor para que o chattering seja minimizado em torno do ponto de equilíbrio do sistema.
A união de estruturas de controle em modos deslizantes com técnicas de controle adaptativo pode
ser encontrada nos estudos de Hai e Ümit [20]. Neste estudo, os autores propõem uma nova
estrutura para o controle em modos deslizante denominada “modos deslizantes de busca
adaptativa”. A proposta é criar uma estrutura de controle adaptativo onde os ganhos de
chaveamento são alterados conforme a estimação dos distúrbios de carga, minimizando então os
efeitos do chattering sem que as características de robustez dos modos deslizantes sejam
afetadas.
Em Furtunato, Araújo e Salazar [24] é também proposta uma estrutura adaptativa de controle em
modos deslizantes. Neste trabalho, a resposta do sistema é comparada com a resposta de um
modelo de referência para o ajuste dos ganhos de chaveamento do controlador. Na Figura 2.5, é
ilustrado o diagrama em blocos para a estrutura proposta em [24]. O modelo de referência
empregado é de primeira ordem cuja saída (ym) é comparada com a saída da planta (y). O sinal de
erro (e) gerado será a entrada para o mecanismo adaptativo que gera o vetor de parâmetros
corrigidos (θ) para o controlador. O mecanismo adaptativo dos ganhos é desenvolvido a partir
dos modos deslizantes que garantirá a robustez nos parâmetros (θ) enviados ao controlador. Para
diminuição do chattering é proposta uma modificação da lei de chaveamento do tipo relé ideal
pela lei de relé com saturação no controlador.
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
17
Figura 2. 5 – Diagrama de blocos do controlador em modos deslizantes com modelo de referência
adaptativo.
Recentemente, novos estudos sobre a aplicação da técnica de controle em modos deslizantes,
voltados à área de acionamentos elétricos, vêem sendo desenvolvidos. Dentre eles, destacam-se:
•
Controle de motores de indução lineares [26];
•
Controle de chaveamento em conversores de potência por Modulação por Largura de
Pulso por Vetor Espacial [28].
O controle e o observador em modos deslizantes para o motor de indução é implementado por
Zhang [34]. Em sua proposta, são projetadas superfícies de primeira ordem para o controle do
fluxo magnético e velocidade do rotor e um observador também de primeira ordem, para a
estimação da velocidade.
O diagrama de blocos da Figura 2.6 ilustra a forma de implementação utilizada. Os blocos SMC e
SMO representam os controladores e o observador em modos deslizantes respectivamente. Como
estratégia para redução do chattering, é utilizada a função de saturação (sat) para chaveamento
dos ganhos da superfícies de velocidade e fluxo magnético do rotor, normalmente utiliza-se uma
na função sinal (sgn) que considera o chaveamento ideal entre os ganhos do controle/observador
em modos deslizantes. Para a síntese das tensões geradas pelo controle, o autor propõem a
estrutura de um conversor de 3 níveis com o neutro grampeado em conjunto com o modulação
por largura de pulsos por vetor espacial, que diminui a quantidade de harmônicos gerados.
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
18
A função sat (saturação), utilizada pelo autor é definida na equação 2.3, onde x é uma variável
genérica e ∆ é a largura ou faixa de limite para troca de sinal da função.
1, x > ∆
x
sat ( x) = , x < ∆
∆
−1, x < ∆
(2.3)
Figura 2. 6 – Diagrama de blocos para o controlador e observador em modos deslizantes em um
sistema de acionamento de um motor de indução.
CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
19
2.4 Conclusão
Neste capítulo, foram apresentados alguns trabalhos sobre a aplicação da técnica de controle
vetorial das máquinas c.a. com especial interesse nos motores de indução.
Foram citadas algumas técnicas de controle robusto em estudos recentes, como os adaptativos e
auto-sintonizados, sendo enfatizadas aquelas que empregam a técnica em modos deslizantes. As
principais características dos modos deslizantes foram listadas, como a robustez às incertezas
paramétricas e distúrbios de carga, justificando sua utilização como controlador em sistemas de
acionamento de máquinas elétricas.
Foram citados alguns estudos que abordam a diminuição do chattering, fenômeno intrínseco ao
controle em modos deslizantes que causa oscilações na resposta do sistema em torno do seu
equilíbrio.
Por fim, através da revisão bibliográfica pôde-se comprovar a importância e atualidade do tema,
indicando que, através do método de controle em modos deslizantes, resultados cada vez mais
satisfatórios vêm sendo obtidos nos estudos e implementações realizadas.
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
20
Capítulo 3
Fundamentos Teóricos
3.1 Introdução
Este capítulo é dedicado aos fundamentos teóricos da técnica de controle vetorial para máquinas
de corrente alternada, em particular o motor de indução trifásico e, os princípios da teoria dos
modos deslizantes.
Inicialmente, na seção 3.2, é apresentado o modelo dinâmico do motor de indução, em termos de
suas equações diferenciais de fluxo magnético ou modelo de distribuição de campos. O modelo
apresentado é uma representação compacta, com base na teoria dos vetores espaciais ou teoria
dos dois eixos, onde as equações dos circuitos de estator e rotor são expressos em um único
sistema de eixos de referência, orientado segundo o vetor fluxo do rotor. A dedução desta forma
de representação é discutida no Apêndice C.
Na seção 3.3, é mostrada a teoria do controle vetorial por orientação indireta de campo em
conjunto com as técnicas de chaveamento de inversores c.c/c.a e, a seguir, na seção 3.4, os
princípios fundamentais da teoria de controle em modos deslizantes. Na seção 3.5 são realizadas
as conclusões que encerram este capítulo.
3.2 Modelagem da Máquina de Indução
A modelagem da máquina de indução é obtida a partir de seu circuito equivalente trifásico, que
envolve um complexo sistema de equações acopladas entre si e de parâmetros variantes no
tempo. Para o estudo a seguir, supõe-se alimentação trifásica equilibrada, distribuição espacial
21
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
senoidal do fluxo magnético no entreferro, estator e rotor cilíndrico e ausência de saturação
magnética no núcleo.
A partir destas premissas, é obtido o modelo do motor em termos da Teoria da Dupla Reação de
Blondel [6][14], a mesma aplicada no estudo de máquinas síncronas. Nesta forma de
representação, obtida a partir da teoria dos vetores espaciais ou teoria de dois eixos, as equações
relativas aos circuitos do estator e rotor são referidas a um único sistema de eixos, denominado
sistema de eixos de referência (dq0). O objetivo da aplicação desta técnica é simplificar o modelo
do motor, bem como desacoplar as componentes de corrente e tensão que geram o fluxo e o
torque eletromagnético no motor, de forma análoga ao motor de corrente contínua.
Como indicado na Figura 3.1, um motor de indução trifásico simétrico alimentado por um
sistema de tensões equilibradas, pode ser representado como uma máquina bifásica equivalente.
Figura 3. 1 – Máquina de indução bifásica.
O sistema de eixos de referência segundo o vetor fluxo magnético de rotor (dq0) e o sistema de
eixos de referência fixo no estator (αβ0), ou sistema estacionário, estão deslocados
espacialmente, entre si, de um ângulo θ r . A velocidade do vetor fluxo do rotor ωr = dθ r pode ser
dt
calculada a partir da velocidade mecânica do rotor e da velocidade de escorregamento da forma,
22
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
ωr = ωsl + pωm
(3.1)
Ou, equivalentemente,
θ r = ∫ (ωsl + pωm ) d ω + θ 0
(3.2)
Onde:
ωr = Velocidade do vetor fluxo magnético do rotor (rad/s).
ωsl = Velocidade de escorregamento (rad/s).
p = Número de pares de polos.
ωm = Velocidade mecânica do rotor (rad/s).
θ 0 = Ângulo inicial entre o sistema de referencial estático αβ0 e o sistema rotativo dq0 (rad).
A seguir, são apresentadas as equações de tensão de estator e rotor, desenvolvidas no sistema de
eixos de referência orientado segundo o vetor fluxo de rotor, (dq0), a serem aplicadas no controle
vetorial por orientação indireta de campo [4][5].
u sd = Rs isd +
u sq = Rs isq +
urd = 0 = Rr ird +
urq = 0 = Rr irq +
d λsd
− ωr λsq
dt
d λsq
dt
+ ωr λsd
d λrd
− (ωr − pωm )λrq
dt
d λrq
dt
+ (ωr − pωm )λrd
(3.3)
(3.4)
(3.5)
(3.6)
Onde u, i e λ representam as variáveis tensão (V), corrente (A) e o fluxo magnético (Wb). Os
subscritos s, r e d, q são, no geral, indicativos das grandezas relativas ao estator, rotor, eixo direto
e eixo em quadratura, respectivamente.
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
23
As equações das componentes dos fluxos eletromagnéticos de estator e rotor, segundo o
referencial (dq0) são dadas por [4][5]:
λsd = Lsisd + Lmird
(3.7)
λsq = Lsisq + Lmirq
(3.8)
λrd = Lr ird + Lmisd
(3.9)
λrq = Lr irq + Lmisq
(3.10)
Onde Ls e Lr representam as indutâncias próprias do estator e rotor, Lm é a indutância mútua e, Lsl
e Lrl indicam as indutâncias de dispersão de estator e rotor, respectivamente. Vale acrescentar as
seguintes relações entre as indutâncias,
Ls = Lm + Lsl
(3.11)
Lr = Lm + Lrl
(3.12)
O conjugado eletromagnético produzido pela máquina, em função das componentes de eixo
direto e em quadratura, no referencial orientado segundo o fluxo do rotor, pode ser expresso
através das seguintes equações, dentre outras [4][5][6]:
Te =
Te =
3
2
3
p (λsd isq − λsq isd )
2
(3.13)
L
p m (λrd irq − λrq ird )
Lr
(3.14)
3.3 Controle Vetorial por Orientação Indireta de Campo
A escolha do sistema de referência para o desenvolvimento do controle vetorial é de fundamental
importância para a simplificação das equações do modelo da máquina e implementação prática da
técnica. Neste trabalho será utilizado o referencial do eixo dq0, onde o eixo direto está orientado
segundo o vetor fluxo magnético do rotor ( λ rd = λ r ) [4][6][9][15].
24
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
3.3.1 Equações para o Controle Vetorial
Considerando a condição anterior, a componente em quadratura do vetor fluxo magnético do
rotor será nula (λrq=0). Desta forma, a equação 3.14 de conjugado eletromagnético do motor pode
ser reescrita como:
Te =
3
2
L
p m
Lr
(λrd irq )
(3.15)
Da equação 3.5, a componente de eixo direto da tensão do rotor pode ser calculada da forma,
urd = 0 = Rr ird +
d λrd
dt
(3.16)
Obtendo-se, a partir desta expressão, a componente de eixo direto da corrente do rotor e
substituindo-a na equação 3.9, então a equação dinâmica da componente de eixo direto do fluxo
do rotor poderá ser dada por:
λrd = − Lr
1 d λrd
+ Lm isd
Rr dt
(3.17)
ou, equivalentemente, no domínio da frequência,
λrd =
sendo τ r =
Lmisd
(1 + sτ r )
(3.18)
Lr
a constante de tempo do rotor.
Rr
Das equações 3.6 e 3.10, tem-se que a velocidade de escorregamento ω sl = ωr − pωm dada por,
ω sl =
Lmisq
τ r λrd
(3.19)
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
25
A velocidade angular e a posição do fluxo magnético do rotor poderão ser calculadas a partir do
conhecimento das correntes de eixo direto e em quadratura do rotor e de sua velocidade
mecânica. A Figura 3.2 ilustra o diagrama de blocos do controle vetorial do motor de indução por
orientação indireta do fluxo de rotor.
Figura 3. 2 – Diagrama do controle vetorial, orientado segundo o vetor fluxo magnético do rotor.
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
26
No diagrama em blocos do controle vetorial da Figura 3.2, as correntes medidas são
transformadas para o sistema de eixos estacionários (αβ0) pelo bloco (2/3) e, em seguida, para o
sistema de eixos orientado segundo o vetor fluxo do rotor (dq0) através do bloco (e−θr), sendo θr
o ângulo entre o referencial estacionário e o vetor fluxo magnético do rotor.
Considera-se, neste sistema de controle, um valor constante para o fluxo magnético do rotor e,
através da relação da equação 3.18, determina-se a corrente de estator no eixo direto de
referência, isd*. O erro entre o valor de referência e o valor medido desta corrente, é aplicado a um
controlador proporcional-integral (PI), gerando um valor de referência para a tensão do estator no
eixo direto (usd*).
Através de um medidor ou observador de velocidade, pode-se calcular o erro entre a velocidade
atual da máquina de indução (ωm). O erro entre a velocidade de referência (ωm*) e a velocidade
medida é, então, aplicado a um controlador PI que fornece o valor de referência para o conjugado
eletromagnético (Te*). O valor estimado para o conjugado eletromagnético da máquina é
calculado através da equação 3.15.
O erro entre o valor referência e o valor estimado do conjugado eletromagnético é responsável
pelo controle do conjugado, gerando um valor de referência para a corrente do estator no eixo em
quadratura (isq*). O erro entre o valor de referência e o real desta corrente é aplicado a um
controlador PI que, por sua vez, fornece o valor de referência para a tensão de estator em
quadratura (usq*).
As componentes das tensões de estator, no sistema de eixos estacionário, são obtidas através do
ângulo do vetor fluxo do rotor θr, calculado a partir da velocidade do rotor e da velocidade de
escorregamento, ωsl, conforme a equação 3.19.
Aplicando-se estas componentes de eixo direto e em quadratura, aos blocos (ejθr) e (3/2), obtémse os valores de referência das tensões de estator no sistema trifásico. Estes valores de referência
podem ser sintetizados por um inversor de potência c.c./c.a. e, posteriormente, aplicados ao
motor. Algumas técnicas para o controle de chaveamento dos inversores c.c./c.a. serão vistas na
próxima seção.
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
27
3.3.2 Técnicas de Chaveamento de Inversores
Inversores de tensão são conversores estáticos destinados a controlar o fluxo de energia elétrica
entre uma fonte de tensão contínua e uma carga de corrente alternada monofásica ou polifásica,
controlando os níveis de valor eficaz da tensão e/ou frequência, dependendo da aplicação [3].
A inversão entre as formas de tensão contínua para alternada se faz por meio do controle de
fechamento e abertura de chaves estáticas, comumente, o IGBT (Insulated Gate Bipolar
Transistor) ou MOSFET (Metal Oxide Semiconductor Field Effect Transistor).
A Figura 3.3 ilustra uma arquitetura básica utilizada nos inversores em ponte trifásicos, onde as
chaves representadas são genéricas, podendo ser algum dos dispositivos semicondutores
mencionados acima.
Figura 3. 3 – Inversor trifásico em ponte com carga genérica
Onde S x , x ∈{1, 2,3, 4,5, 6} indicam os interruptores genéricos, Dx , x ∈{1, 2,3, 4,5, 6} são os
diodos de recuperação reversa, E é uma fonte de tensão contínua (V) e Z é uma impedância de
carga genérica (Ω), como um dos enrolamentos de uma máquina de corrente alternada.
O controle das chaves do inversor pode ser feito utilizando diversas técnicas, como o controle por
defasagem, modulação por onda quase quadrada, técnicas de modulação de largura de pulsos
(PWM – Pulse Width Modulation) natural (ou linear), por eliminação de harmônicos e por vetor
espacial (SVPWM – Space Vector PWM) [11][15], dentre outras. A seguir, será apresentada uma
breve descrição sobre a técnica PWM por vetor espacial.
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
28
A técnica de modulação por largura de pulso por vetor espacial é baseada na teoria do vetor
espacial complexo, usualmente aplicada na modelagem de máquinas de corrente alternada
trifásicas.
A Figura 3.4, apresenta o diagrama elétrico simplificado de um inversor trifásico bipolar, onde
Syx, y ∈ {1,2} e x ∈ {a, b, c}, representam as chaves estáticas dos braços 1, 2 e 3 associados,
respectivamente, às fases a, b e c, as tensões fase-neutro são indicadas como vxn , x ∈{a, b, c} .
Figura 3. 4 – Inversor trifásico ideal
Os sinais de saída do inversor são gerados a partir da seleção dos vetores espaciais de tensão, por
sua vez, compostos em função da amplitude e da posição do vetor tensão de referência trifásico.
Para cada fase do inversor, define-se uma variável de comando cx (k ), x ∈{a, b, c} que poderá
assumir os valores 0 ou 1, correspondentes às posições das chaves S1x e S 2 x , x ∈{a, b, c} ,
conforme a Tabela 3.1.
Tabela 3.1 – Estados das chaves de um braço do inversor de dois níveis.
cx(k)
S1x
S2x
0
1
0
1
0
1
Com dois estados possíveis para cada chave estática em cada braço, são possíveis oito
combinações para as chaves do inversor. A Figura 3.5 mostra os sinais de comando típicos do
PWM com amostragem regular, para um período de modulação T. São também mostrados os
sinais de tensão fase-neutro correspondentes. A Figura 3.6 apresenta os vetores espaciais
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
29
referentes às oito combinações possíveis das tensões na saída do inversor, no formato
tridimensional e através de suas projeções no plano cartesiano. As oito combinações possíveis
são apresentadas na Tabela 3.2. Nesta tabela também são apresentadas as tensões fase-neutro e as
componentes de eixo direto e em quadratura do vetor tensão de saída, no sistema de eixos
estacionário.
A Figura 3.6(a) mostra a disposição dos vetores de tensão no plano tridimensional, relacionandoos à combinação correspondente das chaves do inversor. A Figura 3.6(b) considera a
transformação do sistema trifásico para o sistema estacionário αβ0. Neste referencial, pode-se
observar mais facilmente que os V x , x ∈ {1, 2, 3, 4, 5, 6} , são vetores não nulos, denominados
vetores ativos. Os vetores V0 e V7, correspondentes às combinações 000 e 111, respectivamente,
têm valor zero, com projeções no centro do hexágono.
A partir da Tabela 3.2, as tensões fase-neutro vxn(k) são expressas em função das variáveis de
comando cx(k) como:
van (k )
2 −1 −1 ca (k )
v (k ) = E −1 2 −1 c (k )
bn 3
b
vcn (k )
−1 −1 2 cc (k )
(3.20)
Os valores médios das tensões fase-neutro v xn com x ∈ {1, 2, 3, 4, 5, 6} , durante um período de
modulação T do inversor PWM, são calculados pela equação 3.21, onde τx(k) é a largura dos
pulsos de comando, conforme pode ser visto na Figura 3.5.
van
2 − 1 − 1 τ a ( k )
v = E − 1 2 − 1 τ ( k )
bn 3T
b
vcn
− 1 − 1 2 τ c ( k )
(3.21)
30
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
Tabela 3. 2 – Sinais de comando e tensão de saída do inversor.
van vbn
S1
S2
S3
0
0
0
0
0
0
1
-E
0
1
0
-E
0
1
1
-2E
1
0
0
2E
1
0
1
E
1
1
0
E
1
1
1
3
3
3
3
3
3
0
→
vcn
vsd
vsq
V
0
0
0
0
V0
-E
2E
- 3E
3
V1
3E
V2
3
2E
E
3
3
-E
3
-2E
E
3
3
0
-E
E
3
3
-E
E
3
3
3
-2E
0
3
-E
-E
3
3
E
E
→
3
→
0
V3
3
0
V4
- 3E
3
V5
3E
V6
3
3
0
→
3
-2E
2E
→
0
→
→
→
3
→
V7
Figura 3. 5 – Sinais de comando e tensão fase-neutro.
31
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
Figura 3. 6 – a) Representação dos vetores espaciais formados a partir das combinações das
chaves. b) Hexágono definido no plano αβ0 pelas projeções dos vetores espaciais.
A partir do conceito de vetor espacial de tensão, onde os operadores complexos são dados por
a = e−j2π/3 e a2 = ej4π/3, o vetor tensão médio é definido segundo a expressão:
2
vαβ ( k ) = [van ( k ) + avbn ( k ) + a 2vcn ( k )]
3
(3.22)
Substituindo a equação 3.21 na 3.22, obtém-se:
2
[τ a ( k ) + aτ b ( k ) + a 2τ c ( k )]
3T
E
= τ αβ ( k )
3
vαβ ( k ) =
(3.23)
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
32
Onde τ αβ (k ) , é definido como o vetor de comando do inversor. De forma análoga, para um vetor
*
tensão de referência, vαβ ( k ) , o vetor largura de pulsos, pode ser calculado através da expressão
3.24:
τ αβ (k ) =
T
vαβ * ( k )
E
(3.24)
Deve-se observar que, enquanto o vetor tensão tem a componente de seqüência zero nula, o vetor
de comando tem componente homopolar sempre positiva, ou seja:
1
3
τ 0 (k ) = [τ a (k ) + τ b (k ) + τ c (k )] ≥ 0
(3.25)
Aplicando-se a transformação αβ0 inversa ao vetor de comando do inversor, definido pelas
equações 3.21 e 3.25, obtém-se a expressão simplificada para o cálculo dos intervalos de tempo
em que as chaves S 1 x , x ∈ {a , b , c } , deverão permanecer ligadas para a sintetização do vetor de
referência.
E
van * +τ 0 ( k )
T
E
τ b ( k ) = vbn * +τ 0 ( k )
T
E
τ c ( k ) = vcn * +τ 0 ( k )
T
τ a (k ) =
(3.26)
A Figura 3.7 ilustra as saídas típicas de um inversor trifásico que utiliza a técnica PWM por vetor
espacial as tensões de fase-neutro aplicadas à alimentação do motor de indução trifásico.
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
33
Figura 3. 7 – Saídas típicas de um inversor trifásico com controle por PWM por vetor espacial.
3.4 Fundamentos Teóricos Básicos sobre a Técnica de Modos
Deslizantes
3.4.1 Um Breve Histórico
O controle em modos deslizantes surgiu a partir do controle descontínuo (on-off ou bang-bang),
como uma das soluções propostas para o problema das oscilações inerentes a este tipo de
controle. Neste contexto, a técnica de modos deslizantes considera a utilização do controle
descontínuo a priori, onde a escolha de uma frequência de comutação mais ou menos elevada
está diretamente relacionada ao objetivo do sistema [35].
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
34
De forma mais abrangente, o controle em modos deslizantes como uma solução para os sistemas
de estrutura variável (SEV) consiste, fundamentalmente, em forçar este tipo de movimento para
algumas superfícies do espaço de estados do sistema, a partir do que são obtidas suas principais
características como robustez em relação às incertezas paramétricas e distúrbios externos
[10][17][35].
O conceito dos sistemas de estrutura variável foi introduzido por volta dos anos 50, pelos
pesquisadores russos S.V. Emel'yanov e A.I. Fedotova, considerando inicialmente a análise de
sistemas lineares de segunda ordem com realimentação do erro da saída e de sua derivada, onde a
entrada de controle poderia assumir um entre dois valores possíveis [10][17][35].
De 1962 a 1970, sistemas lineares de ordem superior, invariantes ou variantes no tempo,
começaram a ser analisados. Em geral, os sistemas eram modelados através de sua equação
diferencial de mais alta ordem e uma única entrada ou através de seu modelo equivalente na
forma canônica controlável. Neste período, vários estudos foram realizados com relação à
existência, convergência e estabilidade dos modos deslizantes. Também foram investigados
efeitos das perturbações externas e incertezas paramétricas e sistemas com variáveis de estado
não-mensuráveis para os modos deslizantes [10][35].
Somente a partir de 1970 ocorreu a extensão da teoria dos SEV a uma grande variedade de
sistemas, dentre os quais os sistemas de acionamento elétrico, como decorrência, basicamente, da
mudança do espaço canônico para um espaço de estados mais geral [36].
As restrições à técnica de modos deslizantes centram-se em sua forma de controle autoritária, que
pode requerer transições dos sinais de excitação em faixas muito amplas e submeter os sistemas
aos efeitos da comutação e chattering, excitando dinâmicas do sistema, por vezes, negligenciadas
durante o projeto [10][17][35].
3.4.2 Definições e Conceitos Básicos
Os sistemas de estrutura variável podem ser vistos, genericamente, como um conjunto de
subsistemas contínuos associados a uma lógica de chaveamento apropriada, onde as ações de
controle são funções descontínuas do espaço de estados, distúrbios externos e entradas de
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
35
referência [36]. Proposta por Utkin (1978), uma descrição matemática genérica para os sistemas
de estrutura variável pode ser formulada como:
x = f ( x, t , u ),
x ∈ Rn ,
u ∈ Rm
s ( x, t ) = G ( x, t )
+
ui ( x, t )
ui ( x , t ) = −
ui ( x, t )
(3.27)
(3.28)
para
si ( x, t ) < 0
para
si ( x, t ) > 0
(3.29)
Onde s(x,t) são superfícies de chaveamento definidas, a priori, pela função G(x,t). As entradas de
controle são u-, u+ e as superfícies de chaveamento (si) são funções contínuas, com i =1...m.
Ou seja, um sistema de estrutura variável pode ser definido como um sistema não-linear, no qual
cada componente do vetor de controle, descontínuo sobre uma superfície no espaço de estados,
pode ser igual a uma entre duas funções contínuas do vetor de estados. A síntese do problema
está na escolha dos pares de funções ui e das superfícies si = 0, compondo-se um sistema de 2m
subsistemas contínuos [36].
Estabelecer, portanto, o controle em modos deslizantes para um sistema de estrutura variável,
dado pela equação de estado (3.27), usualmente denominado apenas como controle em modos
deslizantes, requer a especificação de m funções de chaveamento, que determinarão a dinâmica
desejada do sistema,
s ( x, t )T = [ s1 ( x, t ), ⋅⋅⋅, sm ( x , t )]
(3.30)
e uma ação de controle que garantirá a condição de convergência para a interseção das superfícies
de chaveamento a partir de qualquer estado inicial x0i do sistema, em tempo finito. As condições
citadas são ilustradas na Figura 3.8 [10].
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
36
Figura 3. 8 – Modos deslizantes na interseção das superfícies s1(x) e s2(x)
Para garantir que a variável de estado se moverá na direção da superfície de chaveamento e a
alcançará, a condição de convergência é determinada como [36]:
si ( x, t ) > 0
si ( x, t ) < 0
se si ( x, t ) < 0
para i = 1, ⋅⋅⋅, m
se si ( x, t ) > 0
(3.31)
Ou, de forma equivalente:
si si ( x, t ) < 0
para
i = 1, ⋅⋅⋅, m
(3.32)
Esta condição de convergência é global, porém não garante que a superfície será alcançada em
tempo finito [10]. Foi proposta, posteriormente por Utkin (1978), uma aproximação similar para
a garantia da convergência local como:
lim si < 0
s → 0+
e
lim si > 0
s →0−
(3.33)
A condição de convergência pode ser também determinada a partir da escolha de uma função
candidata de Lyapunov [10]:
V ( x, t ) = s T s > 0
(3.34)
Obtendo-se uma condição de convergência global através de:
V ( x, t ) < 0
para s ≠ 0
(3.35)
A convergência em tempo finito será garantida modificando-se a expressão (3.35) de tal forma a
assegurar que [10][35]:
37
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
V ( x, t ) < −ε , para s ≠ 0, ε > 0
(3.36)
O projeto de um sistema de controle em modos deslizantes compreende os métodos matemáticos
para a descrição do comportamento do sistema em modos deslizantes, a teoria de controle e
conhecimentos na área de sua aplicação [10][35].
Os métodos matemáticos usados para descrever a operação em modos deslizantes na interseção
das superfícies de chaveamento e na determinação das condições que garantam sua existência
deparam-se com a descontinuidade da ação do controle, por vezes não se encontrando soluções
únicas para as equações diferenciais que representam o sistema [10].
Da teoria de controle, buscam-se as condições para a garantia de convergência para os modos
deslizantes, para a garantia da robustez às incertezas paramétricas e aos distúrbios externos,
dentre outras [10].
No estágio atual, com os avanços da eletrônica de potência e do controle digital através de
microprocessadores e DSPs, observam-se grandes avanços e inúmeras aplicações do controle em
modos deslizantes, incluindo os sistemas de acionamento de máquinas de corrente alternada.
Outro aspecto importante, neste contexto, diz respeito às técnicas para redução do chattering.
3.4.3 Um Simples Exemplo de Aplicação
Para a compreensão do método de controle em modos deslizantes será utilizado, como exemplo,
um sistema de segunda ordem modelado no espaço de estados, como se segue [10][17]:
x1 = x2
x2 = − x1 + 2 x2 + u
(3.37)
onde:
u = −Gx1
+4, se s ( x, t ) > 0
G=
−4, se s ( x, t ) < 0
s ( x, t ) = x1σ
σ = (0.5 x1 + x2 )
(3.38)
(3.39)
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
38
Sendo s(x,t) a função de chaveamento s(x,t) = 0 define uma superfície ou manifold de
chaveamento composta pelas retas de chaveamento x1 = 0 e σ = 0. Conforme ilustrado na Figura
3.9, tomando-se s(x, t) = 0 como o produto das funções x1 = 0 e σ = 0.5x1 + x2 = 0, tem-se a
divisão do plano de fase em regiões onde s(x, t) assume diferentes sinais. Considerando-se,
separadamente, as regiões onde s(x, t) > 0 e s(x, t) < 0, serão obtidos os seguintes subsistemas e
planos de fase representados através da Figura 3.10 [10]:
x = x2
Subsistema I : 1
x2 = −5 x1 + 2 x2
(3.40)
x = x2
Subsistema II : 1
x2 = 3 x1 + 2 x2
(3.41)
Figura 3. 9 – Regiões definidas pela lógica de chaveamento.
Figura 3. 10 – Planos de fase para os subsistemas I e II .
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
39
A partir de m entradas de controle, o plano de fase do sistema dado por (3.37) a (3.39) será
composto através de 2m subsistemas, selecionados pela lei de chaveamento expressa por sgn(s). O
comportamento resultante será descrito através das trajetórias do sistema sobre a superfície de
chaveamento s(x, t) = 0. A Figura 3.11, ilustra o movimento da variável convergindo para a
superfície de chaveamento, a operação em modos deslizantes após alcançar a superfície até a
origem do sistema [10].
Figura 3. 11 – Plano de fase resultante a partir da aplicação da lei de chaveamento
Sobre a reta x1 = 0, as trajetórias de fase das regiões I e II são unidas sem qualquer ambigüidade,
não existindo nenhum movimento característico exceto pelas descontinuidades sobre a direção do
movimento [10].
Sobre a reta σ = 0.5x1 + x2 = 0, a qual é, em si mesma, uma equação dinâmica, a trajetória do
sistema se dá sobre a própria linha de chaveamento, pois a reta σ = 0 contém somente pontos de
término das trajetórias vindas de ambos os lados, estabelecendo assim uma trajetória especial
sobre σ = 0. Este tipo de movimento é denominado modos deslizantes e suas soluções dependem
somente do ganho associado à variável de estado x1, sendo invariante em relação aos parâmetros
da planta e aos distúrbios externos [10][17].
O movimento do sistema acontece em duas etapas, o modo de convergência ou não-deslizante
quando o sistema a partir de qualquer ponto move-se em direção à linha de chaveamento e
alcança-a em tempo finito e, modos deslizantes, no qual, a trajetória tende assintoticamente para a
origem, definida pela equação diferencial σ = 0.
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
40
Garantida a condição de convergência para o controle em modos deslizantes, conforme equação
(3.32), a origem representa o estado de equilíbrio do sistema. A operação em modos deslizantes
representa o comportamento transitório, onde a dinâmica do sistema é, usualmente, de ordem
menor que o próprio sistema e é determinada apenas pelos parâmetros da superfície de
chaveamento [10].
Inicialmente, o controle em modos deslizantes foi desenvolvido para sistemas lineares, descritos
na forma canônica no espaço de estados, onde se destacam os trabalhos de Andronov e FlugeLotz [10].
A partir desses estudos, o controle em modos deslizantes alcançou uma abrangência maior,
incluindo representações genéricas no espaço de estados. Para isso, tornou-se necessário
desenvolver leis de controle que atendessem expectativas do controle, como convergência para
erro e derivada do iguais a zero em tempo finito, mantendo-se as características de robustez. A
seguir, serão descritos alguns dos métodos de controle utilizados.
3.4.4 Controle em Modos Deslizantes na Forma Canônica
Para desenvolver o controle em modos deslizantes por este método, é necessário que as equações
do sistema estejam escritas na forma canônica do controlador [35]. Considerando um sistema
linear invariante no tempo, de simples entrada u:
x1 = x2
x = x
3
2
i
i
x = x
n
n −1
n
xn = ∑ − axi + bu
i =1
(3.42)
Então, a superfície de chaveamento será dada pela função:
s ( x ) = c1 x1 + c2 x2 + ... + cn xn = 0
(3.43)
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
41
Para um espaço de estados de dimensão n, a função de chaveamento ocorrerá na dimensão n-1, o
que significa que todos os pontos de descontinuidade pertencerão à superfície s(x). A solução de
s(x), ou seja, substituindo 3.43 em 3.42, tem-se:
x1 = x2
i
i
xn −1 = −c1 x1 − c2 x2 − ... − cn −1 xn−1
(3.44)
Em resumo, os coeficientes da função de chaveamento em 3.43, podem ser determinados
diretamente da forma canônica do controlador, descrevendo assim o movimento do sistema para
a dinâmica desejada. A restrição deste método consiste, justamente, no fato de estar limitado a
sistemas lineares descritos na forma canônica controlável [10].
3.4.5 Controle em Modos Deslizantes pelo Método de Fillipov
O método de Fillipov abrange o desenvolvimento do controle em modos deslizantes para
sistemas lineares e não-lineares [10]. A partir de uma planta genérica, representada através das
variáveis de estado x e entrada u:
x = f ( x, u )
(3.45)
e sendo s(x) uma função de chaveamento associada à planta, então a dinâmica do sistema de
estrutura variável será descrita pelas duas seguintes estruturas,
f − ( x, u ) para s(x) > 0
f ( x) = +
f ( x, u ) para s(x) < 0
(3.46)
A dinâmica do sistema não pode ser claramente definida sobre a superfície de chaveamento
s(x)=0. Fillipov descreve a dinâmica do sistema sobre a superfície de descontinuidade como a
média das duas estruturas apresentadas na equação (3.47), como [10][35]:
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
x = f 0 ( x ) = µ f 0+ + (1 − µ ) f 0− ,
42
0 ≤ µ ≤1
(3.47)
f 0− = lim f 0− ( x, u )
(3.48)
sendo:
f 0+ = lim f 0+ ( x, u )
s →0
e
s →0
O termo µ também é função de x e pode ser especificado de tal forma que a dinâmica média f0(x)
seja tangente à superfície s(x) = 0. O método de Fillipov pode ser ilustrado, geometricamente,
através da Figura 3.12. Nesta, tem-se a convergência da dinâmica média da função f0 para a
superfície de chaveamento s(x)=0.
Figura 3. 12 – Representação da dinâmica média do método de Fillipov sobre uma superfície de
chaveamento.
3.4.6 Controle em Modos Deslizantes pelo Método do Controle Equivalente
O método consiste em determinar uma entrada equivalente ue(x) que garanta a convergência do sistema
para a superfície de chaveamento s(x) = 0 [10][17]. Para este caso, considerando o sistema:
x = A( x ) + B ( x )u
(3.49)
O primeiro passo para o desenvolvimento do método de controle equivalente é considerar que
existe uma entrada equivalente que satisfaça a condição de convergência para s(x) = 0. Outra
condição necessária é que a derivada da superfície também convirja para zero.
Desde que o sistema representado pela equação (3.49) possua uma função de chaveamento s(x), a
sua derivada a partir da equação (3.49) em função da trajetória no espaço de estados será:
s( x ) =
∂s
∂s
A( x ) + B( x )u = 0
∂x
∂x
(3.50)
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
43
Manipulando a equação (3.50), encontra-se qual deve ser a entrada de controle equivalente, ue(x),
que garante a convergência do sistema para superfície de chaveamento. A equação (3.51) mostra esta
condição, desde que exista a inversa da derivada de B(x),
−1
∂s
∂s
ue ( x ) = − B ( x )
A( x )
∂x
∂x
(3.51)
Uma vez determinada a entrada de controle equivalente, a dinâmica em modos deslizantes pode ser
descrita considerando u(x) = ue(x). Algumas estruturas básicas para a entrada ue(x), que poderão garantir
a convergência do sistema para a operação em modos deslizantes, são apresentadas a seguir.
A – Controle tipo relé:
ki+
ui (t ) = −
ki
si ( x, t ) < 0
(3.52)
si ( x, t ) > 0
B – Controle por realimentação linear:
ui (t ) = Gi ( x ) x
aij
Gi ( x ) =
bij
si ( x, t ) x j < 0
i = 1, ⋅⋅⋅, m
para si ( x, t ) x j > 0
j = 1, ⋅⋅⋅, n
para
(3.53)
Onde os parâmetros aij e bij são escolhidos para satisfazer a condição de convergência para os
modos deslizantes.
3.4.7 Robustez dos Modos Deslizantes
Para um sistema linear ou não-linear, a dinâmica em modos deslizantes pode ser inteiramente
independente dos erros de modelagem ou distúrbios externos. Neste caso, diz-se que os modos
deslizantes são invariantes às incertezas paramétricas e distúrbios externos, sendo necessário para
tal que certas condições sejam asseguradas [10].
Considere o sistema linear da forma:
x = ( A + ∆A) x + Bu + ζ (t )
(3.54)
44
CAPÍTULO 3. FUNDAMENTOS TEÓRICOS
Onde ∆A e ζ(t) representam, respectivamente, os erros de modelagem e a presença de distúrbios
~
externos. Se existem ∆à e ζ (t ) que satisfaçam as seguintes condições,
∆A = B ∆ Ã
e
~
ζ (t ) = B ζ (t )
(3.55)
então o controle em modos deslizantes é invariante [10].
Fisicamente, as condições descritas, acima, significam que todas as incertezas na modelagem e
distúrbios externos podem ser compensadas através das entradas de controle, ou seja, pela
adequada seleção dos ganhos associados aos termos de chaveamento [10].
3.5 Conclusão
Neste capítulo, foi apresentado o modelo matemático do motor de indução em um sistema de
eixos bifásicos visando à técnica de controle vetorial por orientação indireta do fluxo do rotor. A
seguir, foi descrita a técnica de controle por modulação de largura de pulsos por vetor espacial a
ser aplicada aos inversores de potência, responsáveis pela alimentação das máquinas de corrente
alternada.
Em relação à técnica de controle em modos deslizantes, buscaram-se abordar seus aspectos mais
gerais e suas principais características, como a condição de existência e convergência, alguns
métodos de controle e a robustez em relação às variações paramétricas e distúrbios externos.
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
45
Capítulo 4
Projeto dos Controladores em Modos
Deslizantes
4.1 Introdução
Neste capítulo será apresentado o projeto do sistema de controle de velocidade, em modos
deslizantes para o motor de indução trifásico. O desenvolvimento compreende os critérios para a
escolha das superfícies de chaveamento, o cálculo das constantes de tempo para a convergência
para os modos deslizantes e os respectivos ganhos de chaveamento.
A partir das equações de eixo direto e em quadratura para o motor de indução, segundo o sistema
de eixos estacionário, é proposta uma superfície de chaveamento que seja capaz de fazer com que
o erro e a derivada do erro da velocidade do rotor tenda a zero, de acordo com a condição de
convergência proposta por Utkin [36].
Em seguida, são citadas as principais causas do aparecimento do chattering no controle em
modos deslizantes, bem como algumas formas de redução de seus efeitos. São apresentadas
técnicas como a alteração na lei de chaveamento, o uso de filtros passabaixas e a inclusão de um
termo integral nas entradas de controle [10][37].
É analisado um modelo para o motor de indução, quando este se encontra em modos deslizantes,
buscando-se demonstrar a independência do controle em relação às variações paramétricas e
distúrbios externos.
Na organização do capítulo, a seção 4.2 descreve o projeto do controlador de velocidade em
modos deslizantes, na seção 4.3 são citados os efeitos do chattering e formas para a minimização
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
46
de seus efeitos. A seção 4.4 traz um modelo alternativo para o motor de indução em modos
deslizantes e a seção 4.5 apresenta as conclusões que encerram este capítulo.
4.2 A Técnica de Modos Deslizantes Aplicada ao Controle de
Velocidade do Motor de Indução
O modelo do motor de indução trifásico, considerando tensões de alimentação trifásicas e
balanceadas, pode ser representado em um sistema de eixos de referência bifásico, orientado
segundo o vetor fluxo magnético do rotor, visto na seção 3.2. Neste caso, o vetor fluxo magnético
do rotor, λ r , será igual à sua componente de fluxo de eixo direto λrd e a componente em eixo de
quadratura λrq será nula.
λrd = λr
(4.1)
λrq = 0
(4.2)
Aplicando-se as condições expressas em (4.1) e (4.2) nas equações (3.3) a (3.6), obtém-se:
u sd = Rs isd +
u sq = Rs isq +
d λsd
− ωr λsq
dt
d λsq
dt
urd = 0 = Rr ird +
(4.3)
+ ωr λsd
(4.4)
d λrd
dt
(4.5)
u rq = 0 = Rr irq + (ωr − pω m )λrd
(4.6)
O controle de velocidade do motor de indução a ser desenvolvido considera que o fluxo
magnético do rotor é constante e igual ao seu valor nominal. Neste caso, a derivada do fluxo λrd
será nula e, como consequência, conforme equação (4.5), ird = 0. Da equação (4.6), determina-se
a velocidade angular de escorregamento, ωsl, como:
ω sl = ωr − pωm = −
Rr irq
λrd
(4.7)
Inserindo as condições das equações (4.1) e (4.2) nas equações de fluxo (3.7) a (3.10), obtém-se:
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
47
λsd = Lsisd
(4.8)
λsq = Ls isq + Lmirq
(4.9)
λrd = Lmisd
(4.10)
λrq = 0 = Lr irq + Lmisq
(4.11)
A partir das equações (4.10) e (4.11), e substituindo em (4.7), ωsl pode ser expresso em termos
das correntes de estator de eixo direto e em quadratura como,
ω sl =
Rr isq
(4.12)
Lr isd
e, tomando-se as equações (4.9) e (4.11), obtém-se uma forma alternativa para λsq dada por:
λsq = δ isq
L2m
δ = Ls −
Lr
(4.13)
Para facilitar o projeto das superfícies de chaveamento é necessário expressar as equações (4.3) e
(4.4) em termos das derivadas das correntes de estator de eixo direto e em quadratura,
disd u sd Rs isd ω rδ isq
=
−
+
dt
Ls
Ls
Ls
disq
dt
=
usq
δ
−
Rs isq
δ
−
ωr Ls isd
δ
(4.14)
(4.15)
Da mesma forma, a dinâmica mecânica da máquina é expressa como:
d ωm
T
Bωm
= Te − L −
dt
J
J
d ωm 3 p (λsd isq ) TL Bωm
=
− −
dt
2J
J
J
Onde:
TL = Conjugado da Carga (N.m)
J = Momento de inércia (N.m.s2/rad).
B = Coeficiente de atrito viscoso (N.m.s/rad).
p = Número de pares de polos.
(4.16)
(4.17)
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
48
As superfícies de chaveamento são escolhidas de forma a determinar o comportamento desejado
durante a resposta transitória para os modos deslizantes. Os controladores em modos deslizantes
projetados obedecem ao critério da hierarquia de controle que definirá a ordem na qual as
superfícies entrarão em modos deslizantes [36][37].
Deseja-se primeiro estabelecer o fluxo constante na máquina para em seguida estabelecer o
conjugado. Portanto, a superfície de grau hierárquico superior será a superfície da componente de
corrente que controla o fluxo, neste caso isd. Para que esta superfície convirja o mais rapidamente
para os modos deslizantes foi escolhida uma superfície de ordem zero.
Após garantir os modos deslizantes para o controle do fluxo, deve-se gerar a componente de
corrente isq que garantirá o conjugado necessário e, consequentemente, a velocidade desejada. A
dinâmica linear para a velocidade do rotor é obtida a partir de uma superfície de chaveamento de
primeira ordem.
Após a convergência das superfícies que impõem o fluxo e o conjugado eletromagnético, dentro
da hierarquia do controle, é estabelecida a superfície de controle da componente em quadratura
da corrente de estator, também de ordem zero, para a geração das tensões de referência do
inversor de potência. A justificativa se deve ao fato de que as outras superfícies já se encontram
em modos deslizantes e deseja-se que a ação de controle para esta variável seja instantânea ou o
mais rápido quanto possível.
4.2.1 Superfície de Fluxo Magnético
A superfície de chaveamento s1 para o fluxo magnético será uma superfície de ordem zero que
deverá convergir primeiro, impondo um valor de fluxo constante na máquina. Desta forma, a
superfície é dada por:
s1 = eλ
(4.18)
eλ = λrd* − λrd
(4.19)
eλ = Lm (isd* − isd )
(4.20)
onde eλ representa o erro do fluxo magnético. A entrada de controle para a superfície será:
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
u sd = k d sgn ( s1 )
49
(4.21)
O ganho de chaveamento kd é determinado a partir da condição de existência e convergência dos
modos deslizantes (4.22) [10][36]:
s1
ds1
<0
dt
(4.22)
Substituindo a equação (4.14) em (4.22), tem-se:
ω δi
R
u
s1 s isd − r sq − sd < 0
Ls
Ls
Ls
(4.23)
A partir das equações (4.21), (4.22) e (4.23), obtém-se a expressão para o valor mínimo do ganho
de chaveamento kd.
kd > ωrδ isq − Rs isd
(4.24)
Com a determinação dos parâmetros do motor (Apêndice A) e a limitação de algumas grandezas,
como a máxima corrente, chega-se ao valor mínimo para o ganho de chaveamento kd. No capítulo
que trata da implementação do controle, será determinado este ganho.
O diagrama de blocos da Figura 4.1 ilustra o controlador em modos deslizantes para o fluxo
magnético do motor.
Figura 4. 1 – Controlador em modo deslizante proposto para a superfície de fluxo.
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
50
4.2.2 Superfície de Velocidade
A superfície de chaveamento s2 para a velocidade do rotor será uma superfície de primeira ordem
dada por (4.25) e (4.26), ou seja,
s2 = −cv
deω
+ eω
dt
eω = ωm* − ωm
(4.25)
(4.26)
cv > 0
O erro de velocidade é dado por eω e cv é a constante de tempo para convergência do erro. A
entrada de controle para a superfície é dada por:
*
isq = k q sgn( s2 )
(4.27)
Novamente, o ganho de chaveamento kq é determinado a partir da condição de existência e
convergência dos modos deslizantes em (4.28) [10][36],
s2
ds2
<0
dt
(4.28)
Substituindo a equação (4.26) em (4.25), tem-se que:
s2 = − cv
d (ω m* − ω m )
+ (ωm* − ω m )
dt
(4.29)
A equação (4.29), considerando o valor de referência de velocidade constante, pode ser reescrita
como:
s2 = cv
d ωm
+ (ωm* − ωm )
dt
(4.30)
A partir da substituição da equação (4.17) em (4.30), obtém-se:
3 p(λsd isq ) TL Bωm
*
s2 = cv
− −
+ (ωm − ωm )
J
J
2J
(4.31)
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
51
Da condição de convergência em (4.28), será necessário obter a derivada da superfície de
chaveamento s2, dada por:
3 p (λsd isq ) TL Bωm
− −
d
2J
J
J dωm
ds2
= cv
−
dt
dt
dt
(4.32)
Manipulando a equação (4.32) e, considerando o fluxo magnético do rotor constante [37], os
termos da derivada do fluxo serão nulos. Substituindo as equações (4.31) e (4.32) na condição
expressa por (4.28) e, através das equações que descrevem o comportamento do motor, chega-se
ao ganho de chaveamento mínimo expresso em (4.33), ou seja,
kq >
a1ωm + a2TL + a3
dTL
+ a4isq + a5ωr
dt
a6
(4.33)
Onde:
B
B
a1 = − cv 2
J
J
B
1
a2 = − cv 2
J
J
a3 =
cv
J
R
Bp
3p
3p
a4 = cv
λsd s + 3cv 2 λsd −
λsd
δ
2J
2J
2J
a5 = cv
3 pλsd2
2Jδ
a6 = −cv
3 pλsd
2 Jδ
Conhecendo-se os parâmetros e valores limites de algumas grandezas do motor de indução, como
a corrente de estator e o conjugado eletromagnético (Apêndice A), e o valor determinado para
ganho de chaveamento, chega-se a uma expressão para o cálculo dos valores mínimo e máximo
52
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
da constante de tempo cv. No capítulo que trata dos resultados de simulações será apresentada a
expressão calculada.
O diagrama de blocos da Figura 4.2 ilustra a proposta para o controlador em modos deslizantes
para o controle da velocidade do motor de indução.
S2
Figura 4. 2 – Controlador em modos deslizantes proposto para a superfície de velocidade.
4.2.3 Projeto da Superfície da Componente em Quadratura da Corrente de Estator
Considerando que a superfície do fluxo magnético s1 e da velocidade do rotor s2 já se encontram
em modos deslizantes, é necessário gerar a entrada de controle para a componente em quadratura
da tensão de estator usq*, através do projeto de outra superfície de chaveamento. Esta superfície
será de ordem zero, para alcançar a convergência em modos deslizantes de forma bastante rápida
se comparada à superfície de velocidade [37]. Assim,
s3 = eisq
(4.34)
eisq = isq* − isq
(4.35)
Onde o erro da corrente de eixo em quadratura do estator é dado por eisq. A entrada de controle
para a superfície será:
usq = ki sgn( s3 )
(4.36)
O ganho de chaveamento ki pode ser determinado a partir da condição de existência e
convergência do modo deslizante em (4.37) [10],
s3
ds3
<0
dt
(4.37)
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
53
Substituindo a equação (4.15) em (4.37), tem-se:
u
ω Li
R
s3 − sq + s isq + r s sd < 0
δ
δ
δ
(4.38)
Manipulando a equação (4.38), e substituindo a equação (4.36) na mesma, obtém-se a expressão
para o valor mínimo do ganho de chaveamento ki como:
ki > Rs isq + ωr Ls isd
(4.39)
Analogamente, o valor mínimo para o ganho de chaveamento ki será obtido a partir dos
parâmetros e especificações da máquina.
O diagrama de blocos da Figura 4.3 ilustra a proposta para o controlador em modos deslizantes
para a componente em quadratura da corrente de estator.
Figura 4. 3 - Controlador em modos deslizantes proposto para a componente em quadratura da
corrente de estator.
4.3 Técnicas para a Redução do Chattering
No projeto e análise de sistemas de estrutura variável, supõe-se que a entrada de controle pode ser
chaveada de um valor para o outro a uma frequência extremamente elevada. Entretanto, na
prática, as frequências de amostragem e de chaveamento são limitadas em função dos atrasos
devido ao tempo da conversão analógica/digital (A/D), digital/analógica (D/A), do tempo de
processamento do algoritmo de controle e dos tempos de resposta dos sensores e atuadores. Por
estas razões, dentre outras, o chattering sempre ocorre durante a operação em modos deslizantes,
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
54
manifestando-se como uma oscilação de alta frequência em torno do ponto de equilíbrio e,
consequentemente, sobre a variável controlada. O chattering pode, também, excitar dinâmicas de
alta frequência negligenciadas na modelagem dos sistemas [10][35].
O chattering é um efeito indesejável e intrínseco aos sistemas de estrutura variável. Grandes
esforços têm sido feitos para eliminar ou reduzir a presença/ação do chattering. A seguir, serão
vistos alguns métodos propostos para sua redução.
4.3. Inclusão de Filtros Passabaixas
O uso de um filtro passabaixas entre a saída do controlador em modos deslizantes e a entrada de
controle do motor, a superfície s3 de controle de isq, é uma das estratégias para redução das
oscilações do conjugado eletromagnético e da corrente de estator. Este filtro irá gerar a corrente
isq* de referência, como mostra a equação (4.41) [37].
Este procedimento justifica-se pela natureza descontínua do sinal de controle, que insere
componentes de alta frequência diretamente sobre a corrente de estator e conjugado
eletromagnético, degradando o desempenho do sistema. Com a introdução do filtro, a componente
isq* é substituída pela componente filtrada isqf*, conforme a expressão (4.40). A entrada de controle
para a superfície s3 é alterada para a forma apresentada em (4.41).
*
i sqf =
1
( sω c +1)
isq
*
isq* = isqf
(4.40)
(4.41)
Em [37], propõe-se que esse filtro tenha sua frequência de corte ωc proporcional ao módulo da
superfície de chaveamento de velocidade, conforme a expressão (4.42).
ω c = k s2
(4.42)
Durante a operação normal em regime permanente, a frequência de corte deve ser reduzida ao
máximo para diminuir o ripple de corrente e conjugado, enquanto que no estado transitório, esta
frequência deve ser mais alta, permitindo uma resposta rápida do conjugado.
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
55
4.3.2 Substituição do Relé Ideal por uma Função do Tipo Saturação
O relé ideal, função sgn (sinal), é impossível de ser implementado. Se isto fosse possível, existiria
um modo deslizante ideal ao longo da linha σ = 0, significando ausência completa de chattering,
erro nulo em regime permanente e invariância em relação às variações paramétricas e aos
distúrbios de carga [10][34].
Uma forma de reduzir o chattering é substituir o relé ideal por uma função do tipo saturação [5],
como definida na equação (4.43):
k , se s 2 > ∆
k
u = , se s2 ≤ ∆
∆
− k , se s 2 < -∆
(4.43)
Onde k e ∆ representam, respectivamente, o ganho de chaveamento e a largura ou faixa da função
saturação. A função do tipo saturação inclui um controle proporcional linear de alto ganho nas
proximidades da superfície. No espaço de estados, significa introduzir uma região de fronteira em
torno da superfície de chaveamento, para quais as trajetórias de estado iriam convergir se
satisfeitas as condições de existência dos modos deslizantes. Não há garantia, porém, de que os
estados convirjam para a superfície de chaveamento. Na ausência de perturbações não existe erro
em regime permanente e o chattering não ocorre, porém, a propriedade de invariância é
prejudicada, inclusive podendo deixar de existir. Na Figura 4.4 é ilustrada a convergência para a
superfície de modos deslizantes, incluindo a função de saturação [10][34].
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
56
Figura 4. 4 – Convergência para os modos deslizantes com a função de saturação.
4.3.3 Uso do Termo Integral na Saída do Controlador em Modos Deslizantes
Quando se utiliza a função saturação invés do relé ideal, pode existir erro em regime permanente,
sobretudo devido à natureza proporcional do controle nas vizinhanças da superfície de
chaveamento. Por esta razão, o uso de um compensador integral pode ser interessante para forçar
a condição de erro nulo em regime permanente [37].
Contudo, durante o regime transitório, a ação integral não é adequada, pois pode diminuir o
tempo de resposta [37]. Uma alternativa para a entrada de controle, combinando a função de
saturação a um termo integral pode ser composta, conforme a expressão (4.44) [10][37]. Nesta
formulação o parâmetro ξ é escolhido de forma a garantir a resposta transitória desejada,
funcionando como um ganho integral [37].
k , se s > ∆
k
u = s + ξ ∫ sdt , se s ≤ ∆
∆
− k , se s < -∆
(4.44)
57
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
4.3.4 Região de Fronteira de Largura Ajustável
Uma região de fronteira de largura ajustável pode ser utilizada para tornar compatíveis as idéias
de reduzir o chattering e ao mesmo tempo manter a robustez.
A largura da região, definida pelo parâmetro ∆, é modificada desde um valor grande para reduzir
ou até mesmo eliminar o chattering durante o regime transitório até um valor bem pequeno para
manter a robustez do sistema, à medida que a trajetória da superfície de chaveamento alcança o
ponto de equilíbrio em modos deslizantes [36][37].
4.4 Estudo da Dinâmica do Motor de Indução em Modos
Deslizantes
Nesta seção será desenvolvido um modelo para o motor de indução, considerando o controle de
velocidade em modos deslizantes. As variáveis de estado utilizadas serão os erros da componente
de eixo direto (eisd) e da componente em quadratura da corrente de estator (eisq), o erro de
velocidade (eωm ) e posição mecânica do rotor (θm).
Esse novo conjunto de variáveis permitirá a partir do método de controle equivalente, encontrar
um modelo reduzido para o motor de indução operando em modos deslizantes, de forma simples
e direta. Este modelo será baseado nas equações das superfícies de chaveamento e de suas
derivadas, cujas equações são nulas quando o controle do motor está em modos deslizantes.
As equações das superfícies de chaveamento desenvolvidas são:
s1 = eisd
s2 = cv
deω m
+ eω m
dt
s3 = eisq
(4.45)
(4.46)
(4.47)
A partir das equações de (4.45) a (4.47), escolhe-se um novo conjunto de variáveis de estado:
x1 = eω m
(4.48)
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
58
x2 = eisd
(4.49)
x3 = eisq
(4.50)
x4 = θ m
(4.51)
Para prosseguir com o desenvolvimento, uma expressão genérica desenvolvida a partir de (4.52),
onde y e z representam duas variáveis quaisquer definidas como:
*
*
e y = y − y e ez = z − z
(4.52)
A partir de manipulações matemáticas, tem-se que:
*
*
* *
yz = e y ez − y ez − z e y + y z
(4.53)
A partir das derivadas das expressões (4.45) a (4.47) e sua aplicação na expressão (4.53),
encontram-se as expressões de (4.54) a (4.57) que determinam a dinâmica do motor em modos
deslizantes, onde:
*
*
*
*
*
*
dx1 d ωm TL B ω m Bx1 3 pLs ( x2 x3 − i sq x2 − i sd x3 + i sq i sd )
=
+ +
−
−
dt
dt
J
J
J
2J
( 4.54 )
*
*
* 2 *
*
*
*
*
τ
δ
dx2 d i sd usd Rs i sd Rs x2 δ p
r (i sq ) i sq
=
−
+
−
−
−
−
+
−
−
(4.55)
x
x
i
x
x
i
x
ω
ω
sq
m
sq
m
1 3
1
3
3
*
L *
dt
dt
Ls
Ls
Ls
Ls
s
i sd
i sd
*
*
dx3 d i sq usq Rs i sq Rs x3 pLs
=
−
+
−
+
δ
δ
δ
δ
dt
dt
dx4 *
= ω m − x1
dt
*
*
*
*
*
i sq
τ r Ls *
x1 x2 − i sq x1 − ω m x2 + i sd ω m + δ i sq − * x2 (4.56)
i sd
(4.57)
Considerando que as referências do fluxo e da velocidade serão constantes:
*
d ωm
=0
dt
*
e
d i sd
=0
dt
(4.58)
A referência da corrente de eixo em quadratura é chaveada entre dois valores constantes,
portanto:
59
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
*
d i sq
=0
dt
(4.59)
Quando o motor se encontra em modos deslizantes, as seguintes expressões são verdadeiras:
x1 + cv
dx1
1
= − x1
dt
cv
dx1
= 0,
dt
(4.60)
x2 = 0,
dx2
=0
dt
(4.61)
x3 = 0,
dx3
=0
dt
(4.62)
Substituindo as condições vistas de (4.58) a (4.62) em (4.54), (4.55) e (4.56), obtém-se as
expressões equivalentes para o motor em modos deslizantes.
*
*
*
1
T
B ω m Bx1 3 pLm (i sq i sd )
− x1 = L +
−
−
cv
J
J
J
2J
*
*
*
T
B ω m 3 pLm (i sq i sd )
0= L +
−
J
J
2J
*
( 4.63)
*
u sd Rs i sd pδ * *
τ rδ (i sq ) 2
0=−
+
−
i sq ω m −
Ls
Ls
Ls
Ls i* sd
0=−
u sq
δ
*
+
Rs i sq
δ
+
pLs
δ
*
*
i sd ω m +
τ r Ls *
i sq
δ
(4.64)
(4.65)
Portanto o modelo do motor em modos deslizantes é de segunda ordem e pode ser determinado
pelas equações (4.57) e ( 4.60).
i −1
x1 = cv
i
x4 −1
0 x1 0 *
+ ωm
0 x4 1
(4.66)
Pode-se observar na equação (4.66) a independência do comportamento do motor ao conjugado
de carga e aos parâmetros da máquina, quando em modos deslizantes. A partir das equações
CAPÍTULO 4. CONTROLE EM MODOS DESLIZANTES PARA O MOTOR DE INDUÇÃO
60
(4.63), (4.64) e (4.65), são determinadas as entradas de controle equivalentes, que como visto na
seção anterior, é gerado pelo ganho de chaveamento do controle em modos deslizantes.
*
*
i sqeq =
2(TL + B ω m )
(4.67)
*
3 pLm i sd
*
*
*
*
u sdeq = Rs i sd − pδ i sq ω m − δτ r
*
*
*
(i sq ) 2
*
(4.68)
i sd
*
u sqeq = Rs i sq + pLs i sd ω m + Lsτ r i sq
(4.69)
4.5 Conclusão
Neste capítulo foram apresentados os cálculos dos ganhos de chaveamento e constantes de tempo
do controle em modos deslizantes. Optou-se, segundo a hierarquia de controle, por projetar uma
superfície de ordem zero para o controle do fluxo. Após sua convergência para os modos
deslizantes, uma superfície de chaveamento de primeira ordem é projetada para o erro de
velocidade. Esta superfície e a superfície da componente em quadratura da corrente de estator,
também de ordem zero, controlam a velocidade e o conjugado eletromagnético do motor.
Mostrou-se que no controle em modos deslizantes sempre ocorrerá o chattering. Alguns métodos
para redução destas oscilações foram apresentados. Observou-se, neste estudo, que as técnicas
para redução do chattering diminuem a robustez do controle em modos deslizantes em relação
variações paramétricas e distúrbios externos.
Um modelo alternativo para o motor operando em modos deslizantes é proposto. Este modelo
evidência a robustez e invariância do sistema em relação à variação de parâmetros e aos
distúrbios de carga.
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
61
Capítulo 5
Resultados de Simulações
5.1 Introdução
Neste capítulo serão apresentados os resultados de simulações, realizados em ambiente MatLab,
do sistema controle de velocidade em modos deslizantes para o motor de indução. Tomando por
base as equações desenvolvidas para os ganhos de chaveamento e constante de tempo mostrado
no capítulo anterior, são propostos alguns algoritmos para estudar o comportamento do motor e a
robustez do sistema de controle em relação à variação paramétrica e aos distúrbios de carga.
Em um primeiro instante, é apresentado o controle do motor utilizando controladores do tipo
proporcional-integral (PI). Em seguida, são propostas superfícies de chaveamento para a
velocidade e para as componentes de eixo direto e em quadratura da corrente de estator. Várias
simulações são realizadas para a análise do sistema de controle em relação aos aspectos de
robustez.
São propostos dois métodos para a redução do chattering. O primeiro trata da utilização de um
filtro passabaixas para gerar a componente de eixo em quadratura da corrente de estator de
referência isq*, responsável pela produção do conjugado eletromagnético. A segunda estratégia
baseia-se na modificação da lei de controle para uma função do tipo saturação, acrescentando-se
um termo integrador para gerar a componente de tensão de estator em quadratura de referência
usq*.
Na organização do capítulo, a seção 5.2 mostra os cálculos realizados para a determinação dos
ganhos de chaveamento para as superfícies projetadas, a partir das condições nominais do motor.
Na seção 5.3 são vistos os resultados de simulação para diversas condições de carga e velocidade
62
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
utilizando-se controladores PI e controladores em modos deslizantes. A seção 5.4 apresenta as
conclusões a respeito dos resultados obtidos.
5.2 Determinação dos Ganhos de Chaveamento e Constante de
Tempo
Como visto na seção 4.2, através da expressão (4.24) pode-se determinar o ganho de
chaveamento kd para a superfície de chaveamento do fluxo magnético do rotor. A partir dos
parâmetros e especificações nominais do motor, conforme Apêndice A, determinou-se o valor do
ganho como:
kd > 220.61
(5.1)
Assim, nas simulações utilizou-se kd = 230.
O máximo valor da componente em quadratura da corrente de estator é isqmáx = 1A. O ganho kq
será limitado neste valor, uma vez que a saída de controle desta superfície controla diretamente o
conjugado eletromagnético do motor e, deseja-se que o seu valor também seja limitado ao seu
valor máximo.
Considerando que os valores máximos dos distúrbios de carga serão sempre menores que o
conjugado máximo do motor e, substituindo as condições e parâmetros nominais do motor na
expressão (4.33), obtêm-se os valores máximos e mínimos para constante de tempo cv da
superfície de chaveamento de velocidade,
1>
11093337cv − 1269.469
−807.96cv
(5.2)
Ou seja,
0.00014435 < cv < 0.0012376
(5.3)
A partir daí, definiu-se que:
cv = 0.00016878 s
Da expressão (4.39), obtém-se o valor mínimo para ki como:
(5.4)
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
ki > 204.27
63
(5.5)
Tendo-se adotado, nas simulações ki =250.
5.3 Resultados de Simulação
A fim de estabelecer uma análise comparativa entre o método clássico de controle, através de
controladores PI e mostrar a robustez do controle em modos deslizantes, serão mostrados os
resultados de simulação do controle vetorial da máquina de indução, incluindo:
•
Controladores PI para o fluxo e velocidade do rotor;
•
Controladores em modos deslizantes para o fluxo e velocidade;
•
Controladores em modos deslizantes para o fluxo e velocidade, e utilização de um filtro
passabaixas para a redução do chattering;
•
Controladores em modos deslizantes para o fluxo e velocidade, e utilização da lei de
controle do tipo saturação incluindo o termo integral para a redução de chattering.
5.3.1 Controle Vetorial com Controladores PI para o Fluxo e a Velocidade do Rotor
O diagrama de blocos do controle vetorial com controladores PI para o fluxo magnético e a
velocidade do rotor pode ser visto na Figura 3.2. Nesta seção, são apresentados os resultados de
simulação obtidos a partir do uso dos controladores PI para a geração dos sinais de referência das
componentes de eixo direto (usd*) e em quadratura (usq*) da tensão de estator, respectivamente,
para o controle do fluxo e conjugado eletromagnético / velocidade da máquina. Os controladores
PI foram ajustados segundo o critério de Ziegler-Nichols [38].
A Figura 5.1 mostra os gráficos da variação imposta à carga, a corrente de estator na fase A e
velocidade do motor. A Figura 5.2 apresenta o conjugado eletromagnético, as componentes de
eixo direto e em quadratura da corrente de estator e, a Figura 5.3 mostra o detalhe da tensão faseneutro da fase A sintetizada pelo inversor PWM. Todas as simulações têm como referência uma
entrada em degrau de velocidade de 1800 rpm e um conjugado de carga máximo de 0,67 Nm,
imposto após o motor alcançar o regime permanente.
64
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
As Figuras 5.4 e 5.5 apresentam os gráficos da corrente de estator da fase A e a velocidade do
motor, para uma variação de carga de 0,67 Nm e velocidades de referência iguais a 900 e 300
rpm, respectivamente. A partir da inclusão da carga, em rotações mais elevadas, observa-se uma
pequena perturbação sobre a velocidade, porém, a ação de controle é capaz, em curto intervalo de
tempo, de retornar à velocidade de referência.
a - Variação de carga
Carga (Nm)
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
Tempo(s)
b - Corrente de estator da fase (A)
0
0.2
0.4
0.6
0
0.2
0.4
0.6
1
1.2
1.4
1
1.2
1.4
1
1.2
1.4
1
Corrente (A)
0.5
0
-0.5
-1
0.8
Tempo(s)
c - Velocidade do motor
Velocidade (rpm)
2000
1500
1000
500
0
0.8
Tempo(s)
Figura 5. 1 – a) Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle PI a 1800rpm.
Conjugado eletromagnético
Conjugado (Nm)
1
0.5
0
-0.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1
1.2
1.4
1
1.2
1.4
Tempo(s)
Componente da corrente de estator no eixo alfa
Corrente (A)
1
0.5
0
-0.5
-1
0
0.2
0.4
0.6
0.8
Tempo(s)
Componente da corrente de estator no eixo beta
Corrente (A)
1
0.5
0
-0.5
-1
0
0.2
0.4
0.6
0.8
Tempo(s)
Figura 5. 2 – a) Conjugado eletromagnético. b) Corrente de estator de eixo alfa (α). c) Corrente
de estator de eixo beta (β). Ambos com controle PI a 1800rpm.
65
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
Tensão fase-neutro estator fase (A)
250
200
150
100
Tensao (V)
50
0
200
150
-50
100
50
-100
0
-50
-150
-100
-150
-200
-200
0.185
-250
0
0.2
0.4
0.19 0.195
0.2
0.6
0.205
0.21 0.215 0.22
0.8
1
1.2
1.4
Tempo(s)
Figura 5. 3 – Tensão de estator da fase A sintetizada pelo inversor com controle PI a 1800rpm
a - Variação de carga
Carga (Nm)
0.8
0.6
0.4
0.2
0
0
0.1
0.2
0.3
0.4
0.5
0.6
Tempo(s)
a - Corrente de estator fase (A)
0
0.1
0.2
0.3
0.4
0.5
Tempo(s)
c - Velocidade do motor
0
0.1
0.2
0.3
0.4
0.5
Tempo(s)
0.7
0.8
0.9
1
0.6
0.7
0.8
0.9
1
0.6
0.7
0.8
0.9
1
Corrente (A)
1
0.5
0
-0.5
-1
Velocidade (rpm)
1000
500
0
Figura 5. 4 – a )Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle PI a 900rpm.
Em baixa rotação, conforme a Figura 5.4 e, principalmente, a Figura 5.5, o distúrbio causado pela
inserção de carga não pôde ser compensado satisfatoriamente pela ação dos controladores PI, de
acordo com os ganhos previamente ajustados.
66
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
a - Variação da carga
Carga (Nm)
0.8
0.6
0.4
0.2
0
0
0.1
0.2
0.3
0.4
Tempo(s)
b - Corrente de estator fase (A)
0.5
0.6
0.7
0.8
0
0.1
0.2
0.3
0.4
Tempo(s)
c - Velocidade do motor
0.5
0.6
0.7
0.8
0
0.1
0.2
0.3
0.4
Tempo(s)
0.5
0.6
0.7
0.8
Corrente (A)
1
0.5
0
-0.5
-1
Velocidade (rpm)
400
300
200
100
0
Figura 5. 5 – a) Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle PI a 300rpm.
5.3.2 O Controle Vetorial em Modos Deslizantes aplicado à Máquina de Indução
O diagrama de blocos da Figura 5.6 apresenta a técnica de controle em modos deslizantes
aplicada ao controle de velocidade do motor de indução. Analogamente ao diagrama apresentado
na Figura 3.2, o valor de referência do fluxo magnético do rotor determina a componente de eixo
direto da tensão de usd*. O erro de velocidade em conjunto com o erro da corrente em quadratura
do estator, vistos nas expressões (4.27) e (4.36), são responsáveis pelo controle do conjugado
eletromagnético / velocidade da máquina, através da componente em quadratura da tensão de
estator usq*. Estas ações de controle são independentes entre si e, realizadas por controladores em
modos deslizantes, conforme o desenvolvimento apresentado no Capítulo 4.
Os resultados de simulação apresentados a seguir, Figura 5.7, tem como referência de velocidade
1800rpm e inclusão de um conjugado de carga de 0,67Nm, imposto após o motor alcançar o
regime permanente. Nos gráficos da Figura 5.7 são mostradas a variação da carga, o conjugado
eletromagnético, a corrente de estator na fase A e a velocidade resultante do motor.
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
67
Figura 5. 6 – Diagrama de blocos do controle de velocidade em modos deslizantes para o motor
de indução.
68
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
a - Variação da carga
Carga(Nm )
1
0.5
Conjugado (Nm )
0
0
0.2
0.4
0.6
0
0.2
0.4
0
0.2
0
0.2
0.8
Tempo(s)
b - Conjugado eletromagnético do motor
1
1.2
1.4
0.6
1
1.2
1.4
0.4
0.6
1
1.2
1.4
0.4
0.6
1
1.2
1.4
2
0
-2
-4
0.8
Tempo(s)
c - Corrente de estator da fase
Corrente(A)
2
0
Velocidade (rpm )
-2
0.8
Tempo(s)
d - Velocidade do motor
2000
1000
0
-1000
0.8
Tempo(s)
Figura 5. 7 – a) Variação de carga. b) Conjugado eletromagnético do motor. c) Corrente de
estator na fase A. d) Velocidade do motor. Com controle em modos deslizantes a 1800rpm.
A Figura 5.8, mostra a trajetória da superfície de velocidade onde se pode observar a
convergência da superfície para a origem do sistema. Nota-se que os chaveamentos ocorridos
estão bem próximos da origem, mostrando que o sistema já alcançou o estado de equilíbrio.
6000
4000
2000
Derivada Vel.(rpm/s)
0
-2000
Origem/equilíbrio dos
modos deslizantes.
-4000
-6000
-8000
-10000
-500
0
500
1000
1500
2000
Erro Vel.(rpm)
Figura 5. 8 – Trajetória da superfície de velocidade para o controle em modo deslizante.
69
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
A Figura 5.9 apresenta, com detalhes, os efeitos do chattering. Através deste gráfico, pode-se
constatar que a variação da carga não provocou perturbações significativas na velocidade,
confirmando esta forma de robustez do controle em modos deslizantes.
A Figura 5.10 mostra, que o aumento de carga reduz a frequência das oscilações por ela se
comportar como um filtro mecânico [37]. Pode-se observar, ainda, um pequeno aumento na
amplitude do chattering na presença de carga.
2000
1000
1810
1805
Velocidade (rpm)
Velocidade (rpm)
1500
500
0
1800
1795
1790
1785
1780
0.945
-500
0
0.2
0.4
0.6
0.8
0.95
0.955
Tempo(s)
1
0.96
0.965
1.2
1.4
Tempo(s)
Figura 5. 9 – Detalhe das oscilações na velocidade no controle em modos deslizantes quando sem
carga.
Para analisar a robustez do controle em modos deslizantes à variação paramétrica, considerou-se
um aumento de 20% nas resistências do estator e do rotor, para velocidade e carga nominal do
motor. Segundo a Figura 5.11, as oscilações inerentes ao chattering ocorrem com menor
amplitude e frequência devido ao aumento das constantes de tempo do motor. Observa-se uma
ligeira melhoria no desempenho do sistema e a robustez da técnica de modos deslizantes aos
distúrbios em relação ao aumento das resistências elétricas da máquina, variações comumente
encontradas na prática.
70
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
2000
1500
1860
1820
Velocidade (rpm)
Velocidade (rpm)
1840
1000
500
1800
1780
1760
1740
0
1720
1
-500
0
0.2
0.4
0.6
1.01
1.02
1.03
1.04
1.05
Tempo(s)
0.8
1
1.06
1.07
1.2
1.08
1.4
Tempo(s)
Figura 5. 10 – Detalhe das oscilações na velocidade no controle em modos deslizantes quando
inserida a carga.
2000
1000
1860
1815
1840
1810
0
1805
Velocidade (rpm)
500
Velocidade (rpm)
Velocidade (rpm)
1500
1800
1795
1790
0.985
0.2
0.4
1780
1760
1720
1780
0
1800
1740
1785
-500
1820
0.99
0.995
Tempo(s)
0.6
1
0.8
1.08
1.1
1
1.12
1.14
Tempo(s)
1.2
1.16
1.4
Tempo(s)
Figura 5. 11 – Resposta de velocidade com carga nominal e 20% de variação nas resistências do
estator e rotor, a 1800rpm.
A Figura 5.12 mostra a resposta de velocidade do motor com carga de 0,67Nm, a 300rpm.
Observa-se que, mesmo em baixa rotação, o controle em modos deslizantes continua
apresentando boa robustez ao distúrbio de carga.
71
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
a - Variação da carga
0.8
Carga (Nm)
0.6
0.4
0.2
0
0
0.1
0.2
0.3
0.4
Tempo(s)
b - Corrente de estator da fase
0.5
0.6
0.7
0.8
0
0.1
0.2
0.3
0.4
Tempo(s)
c - Velocidade do motor
0.5
0.6
0.7
0.8
0
0.1
0.2
0.3
0.4
Tempo(s)
0.5
0.6
0.7
0.8
Corrente(A)
2
1
0
-1
-2
Velocidade (rpm)
400
200
0
-200
Figura 5. 12 – a) Variação de carga. b) Corrente de estator na fase A. c) Velocidade do motor.
Ambos com controle em modos deslizantes a 300rpm.
5.3.3 Controle Vetorial em Modos Deslizantes com Filtro Passabaixas na Saída da
Superfície de Velocidade
A presença do chattering sobre a velocidade do motor deve-se, principalmente, ao chaveamento
da componente em quadratura da corrente de estator. Uma das formas para sua minimização
consiste na utilização de um filtro passabaixas, com frequência de corte variável calculada em
função do módulo da superfície de velocidade s2.
Quando o erro de velocidade é grande, é importante que o chaveamento da componente da
corrente de estator em quadratura seja realizado com frequência mais elevada, mantendo as
características dos modos deslizantes. Por outro lado, quando o erro de velocidade é pequeno,
frequências de chaveamento mais baixas podem ser suportadas sem que haja significativo
aumento das oscilações sobre o conjugado e, por conseqüência, da velocidade em regime
permanente. A expressão (5.6) apresenta a equação para o filtro proposto.
72
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
ω = 4π abs ( s )
2
c
ki sgn( s2 )
isq − filtrado =
1
s
+1
ωc
s = i
3 sq − filtrado − isq
(5.6)
Onde ωc é a frequência de corte do filtro em (rad/s), isq-filtrado é corrente de estator em quadratura
filtrada em (A) que será a nova referência para esta corrente. Na Figura 5.13, são apresentados os
gráficos de variação de carga, a corrente de estator da fase A e a velocidade do motor com o uso
do filtro passabaixas.
a - Variação de carga
0.8
Carga (Nm)
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0
0.2
0
0.2
0.8
Tempo(s)
b - Corrente de estator da fase A
1
1.2
1.4
0.4
0.6
1
1.2
1.4
0.4
0.6
1
1.2
1.4
Corrente(A)
2
1
0
-1
-2
0.8
Tempo(s)
c - Velocidade do motor
Velocidade (rpm)
2000
1500
1000
500
0
0.8
Tempo(s)
Figura 5. 13 – a) Variação de carga. b) Corrente de estator da fase A. c) Velocidade do motor.
Ambos com controle em modos deslizantes com uso do filtro passabaixas, a 1800rpm.
Nos gráficos das Figuras 5.14, destaca-se os detalhes da redução nas amplitudes e frequências das
oscilações sobre a velocidade se comparadas com a Figura 5.10, evidenciando a funcionalidade
do filtro passabaixas.
73
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
2000
1800
1830
1820
Velocidade (rpm)
1600
1810
1800
1790
1200
1780
1830
1770
1000
1.11
1.12
1.13
Tempo(s)
1.14
1.15
1820
Velocidade (rpm)
Velocidade (rpm)
1400
800
600
400
1810
1800
1790
1780
1.27
200
0
0
0.2
0.4
0.6
0.8
1.28
1.29
Tempo(s)
1
1.2
1.3
1.4
Tempo(s)
Figura 5. 14 – Detalhe do chattering do controle em modos deslizantes com uso do filtro
passabaixas, a 1800rpm.
A Figura 5.15 mostra a trajetória da superfície de chaveamento de velocidade. Se comparada à
superfície de chaveamento da Figura 5.8, pode-se observar que a versão que inclui o filtro
passabaixas tende para a origem do sistema de forma menos abrupta, o que significa aumento da
sensibilidade aos distúrbios. Isso comprova a análise apresentada, no capítulo 4, em relação à
perda de robustez do sistema com o uso de filtros passabaixas.
8000
6000
Derivada Vel.(rpm/s)
4000
2000
0
-2000
Origem/equilíbrio dos
modos deslizantes.
-4000
-6000
-200
0
200
400
600
800
Erro Vel.(rpm)
1000
1200
1400
1600
1800
Figura 5. 15 – Trajetória da superfície de velocidade para o controle em modos deslizantes com
uso de um filtro passabaixas, a 1800rpm.
74
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
5.3.4 Controle Vetorial em Modos Deslizantes com Termo Integral na Superfície de
Corrente em Quadratura e Utilização de Função Tipo Saturação
Como apresentado na seção 4.3.3, outra forma para a redução do chattering consiste na
substituição da função relé ideal por uma função do tipo relé com saturação. Como exposto, é
necessária a criação de uma largura de faixa (∆) em torno da superfície de chaveamento, definida
a partir de um compromisso entre a robustez do sistema e o erro em regime permanente.
Uma forma de aplicação dessa técnica, sem comprometer a robustez do controle em modos
deslizantes, pressupõe a inclusão de um termo integral na saída da superfície s3, a qual gera a
referência para a componente em quadratura da tensão de estator. Desta forma, o uso de uma
largura de faixa suficientemente estreita, que não comprometa a convergência e a robustez dos
modos deslizantes, reduza as oscilações e, através do termo integral, força erro zero em regime
permanente. A equação 5.7 mostra como pode ser realizado esta alteração,
kq sgn( s3 ), se s3 > ∆
u sq = k q
s3 + ξ ∫ s3 dt , se s3 ≤ ∆
∆
*
(5.7)
Nas simulações, utilizou-se ∆ = 1 e ξ = 1000. Nos gráficos da Figura 5.16, são mostrados a
variação de carga, a corrente de estator na fase A e a velocidade do motor.
a - Variação da carga
Carga (Nm)
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
Tempo(s)
b - Corrente de estator da fase
0.8
1
1.2
0
0.2
0.4
0.6
Tempo(s)
c - Velocidade do motor
0.8
1
1.2
0
0.2
0.4
0.6
Tempo(s)
0.8
1
1.2
Corrente(A)
2
1
0
-1
-2
Velocidade (rpm)
2000
1000
0
-1000
Figura 5. 16 – a) Variação de carga. b) Corrente de estator da fase A. c) Velocidade do motor.
Ambos com controle em modos deslizantes, incluindo o relé de saturação com termo integral.
75
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
Os gráficos da Figura 5.17 mostram a redução da amplitude e frequência das oscilações, devido
ao efeito chattering, sobre a velocidade da máquina de indução.
2000
1830
1815
1000
1820
500
Velocidade(rpm)
1810
Velocidade(rpm)
Velocidade(rpm)
1500
1805
1800
1795
1790
1810
1800
1790
1780
1770
1785
1760
0.79
0
-500
0
0.2
0.4
0.795
0.8
0.805
Tempo(s)
0.6
Tempo(s)
0.81
0.9
0.8
0.91
0.92
0.93
Tempo(s)
0.94
1
1.2
Figura 5. 17 – Detalhe do chattering com o controle em modos deslizantes, incluindo o relé de
saturação com termo integral, a 1800rpm.
A Figura 5.18 mostra a trajetória da superfície de velocidade. Nota-se que os chaveamentos
apresentam menor amplitude, durante a fase de convergência, em relação aos casos anteriores.
Ainda, após a convergência, apresentam oscilações bem próximas da condição (erro = derivada
do erro = 0).
4000
3000
2000
Derivada Vel.(rpm/s)
1000
0
-1000
-2000
Origem/equilíbrio dos
modos deslizantes.
-3000
-4000
-5000
-6000
-500
0
500
1000
1500
2000
Erro Vel.(rpm)
Figura 5. 18 – Trajetória da superfície de velocidade para o controle em modos deslizantes,
incluindo o relé de saturação com termo integral, a 1800rpm.
CAPÍTULO 5. RESULTADOS DE SIMULAÇÕES
76
5.4 Conclusão
Neste capítulo realizou-se o cálculo dos ganhos de chaveamento e constantes de tempo para o
controle de velocidade, em modos deslizantes, da máquina de indução. Foram considerados, para
sua determinação, os parâmetros e condições nominais de operação do motor.
Para a análise de desempenho e robustez às variações de parâmetros e carga, foram realizadas
simulações utilizando-se controladores PI e em modos deslizantes. Pode-se observar que para o
controle PI existe uma maior perturbação sobre a velocidade quando a carga é inserida, o que não
ocorre para o controle em modos deslizantes.
Os efeitos do chattering são intrínsecos ao controle em modos deslizantes. Para sua redução
foram propostas duas estratégias, através do uso de um filtro passabaixas na entrada de controle
da superfície que gera a referência da componente em quadratura da corrente de estator. Houve a
redução das oscilações sobre as variáveis controladas, porém a característica de robustez do
controle pode ser comprometida.
A segunda estratégia apresentada consiste de uma modificação na lei de chaveamento do tipo relé
ideal para relé com saturação. O uso da saturação introduz uma faixa em torno da superfície de
chaveamento, concorrendo para a perda de robustez. Uma forma para a redução das oscilações,
garantindo a robustez do sistema, foi obtida com o uso de um termo integral na saída da
superfície de corrente em quadratura do estator. Nas simulações observou-se redução
significativa do chattering sem perda de robustez.
Os resultados encontrados nas simulações foram satisfatórios, orientando e facilitando a
implementação dos algoritmos durante a fase experimental do trabalho.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
77
Capítulo 6
Resultados Experimentais
6.1 Introdução
Neste capítulo, serão apresentados os resultados experimentais obtidos a partir de um sistema de
acionamento elétrico composto, basicamente, pelo DSP da Microchip - modelo dsPIC30F3011, o
drive de potência da IRF - modelo IRAMS10U60A e um motor de indução de potência 0,16cv e
velocidade nominal 1730rpm.
Serão, inicialmente, abordadas as características técnicas do protótipo desenvolvido, com ênfase
nos principais dispositivos utilizados.
Foram implementadas três versões para o controle de velocidade do motor de indução, com base
na técnica de controle vetorial por orientação indireta de campo:
− Através de controladores Proporcional e Integral (PI);
−
Utilizando três controladores em modos deslizantes para o controle do fluxo
magnético, conjugado eletromagnético e a componente em quadratura da corrente
de estator;
− Uma versão em modos deslizantes modificada, onde a superfície de corrente em
quadratura do estator utiliza a função do tipo relé com saturação e inclui um termo
integral para a redução do chattering.
A exemplo das análises realizadas através de simulações, um dos principais objetivos
compreende a comparação da técnica tradicional de controle através de PI e em modos
deslizantes.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
78
Na organização do capítulo, a seção 6.2 mostra as características básicas do protótipo e
componentes utilizados. Na seção 6.3, são vistos as análises e resultados experimentais relativos
aos três algoritmos implementados. A seção 6.4 encerra o capítulo com as conclusões obtidas a
partir dos resultados experimentais.
6.2 Estrutura do Protótipo
A montagem realizada foi baseada no kit de desenvolvimento EasydsPIC4, fornecido pela
empresa Mikroe. Este kit contém todos os recursos necessários para desenvolvimento de
aplicações dos DSPs da Microchip - família dsPIC30F. A Figura 6.1 mostra o kit utilizado.
Figura 6. 1 – Kit EasydsPIC4 de desenvolvimento utilizado na montagem experimental [39].
O DSP escolhido para realizar o controle do motor foi o dsPIC30F3011 que possui as seguintes
características [39]:
•
DSC com funções de microcontrolador e processamento de sinais em 16 bits.
•
Velocidade de processamento de 30MIPS com clock de 120MHz;
•
8 entradas analógicas com resolução de 10 bits e taxa de amostragem até 1MS/s;
•
6 canais PWM, incluindo as funções complementares, geração de dead time e
alinhamento do pulso pelo centro do período de PWM;
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
79
•
Comunicação serial via RS232, USB e Ethernet;
•
Biblioteca matemática, incluindo filtros digitais de resposta ao impulso finita (FIR) e
resposta ao impulso infinita (IIR), convolução de sinais, dentre outras funções para o
processamento digital de sinais;
•
33 pinos que podem ser configurados como entrada ou saída digital (IO), compatível com
níveis TTL;
•
Memória RAM 2kbytes e, memória de programa Flash EPROM de 48kbytes.
O drive de potência IRAMS10UP60A, usado para o acionamento do motor c.a., tem como
características [40]:
•
Tensão Vce máxima: 600V;
•
Corrente eficaz máxima: 10A ( 25oC) ou 5A (100oC);
•
Frequência de chaveamento máxima: 20kHz;
•
Saída para monitoramento da temperatura e entrada para TRIP (desabilita as entradas de
pulso dos IGBTs), no caso de sobrecarga;
•
Tensão de comando dos IGBTs compatível com níveis TTL.
A Figura 6.2 ilustra o drive de potência utilizado no acionamento do motor de indução.
Figura 6. 2 – Drive IRAMS10UP60A [40].
Os dados do motor utilizado estão no Apêndice A deste trabalho. Para a medição das correntes e
tensões de estator, foram utilizados transdutores de efeito Hall LM-20P e LV-25P,
respectivamente. A foto da montagem é apresentada na Figura 6.3. A conexão entre o kit de
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
80
desenvolvimento e o drive de potência foi realizada através de uma interface para o
condicionamento de sinais que pode ser vista na Figura 6.3, cujo diagrama eletrônico encontra-se
no Apêndice B.
Figura 6. 3 – Foto do protótipo e detalhe da placa de interface projetada.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
81
6.3 Resultados Experimentais
Para tentar obter uma comparação do desempenho do método de controle vetorial, aplicada ao
controle de velocidade da máquina de indução, a partir de controladores PI e da técnica de modos
deslizantes, foram realizados experimentos com três algoritmos.
A estrutura do protótipo em diagrama de blocos é ilustrada na Figura 6.4. No diagrama, a placa
de interface de potência se encontra o drive de potência IRAM e, o circuito de instrumentação
que condiciona os sinais de corrente e velocidade para o dsPIC. O drive IRAM sintetiza a tensão
de alimentação para o motor de indução (MIT) conforme os comandos PWM vindos do dsPIC.
Um gerador de corrente contínua (GCC) é acoplado ao motor (MIT). A carga mecânica para o
motor de indução é simulada quando são conectadas cargas resistivas na armadura do GCC.
Figura 6. 4 – Diagrama de blocos da estrutura do protótipo
Considerou-se a frequência de amostragem igual à frequência de chaveamento escolhida como
2kHz. A tensão do barramento c.c. foi definida em 300Vcc. Os ajustes dos controladores PI,
ganhos de chaveamento, constantes de tempo dos controladores MD, dentre outros parâmetros,
são apresentados na Tabela 6.1.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
82
Tabela 6. 1 – Ganhos e parâmetros dos controladores.
Controladores PI
Controladores em Modos Deslizantes
Controlador Controlador Superfície S1 Superfície S2 Superfície S3
Controlador
Velocidade Conjugado
kd = 230
kq = 1
ki = 250
de Fluxo λrd
ωm
Te
cv = 0,00016878s
Kp = 0,035
Kp = 40
Kp = 0,025
∆=1
Ki = 0,045
Ki = 1500
Ki = 0,050
ξ = 1000
As Figuras 6.5 e 6.6 apresentam a resposta do sistema de acionamento com controladores PI,
aplicados ao controle desacoplado do fluxo e conjugado eletromagnético e com conjugado de
carga nula, para velocidades de referência iguais a 250rpm e 1800rpm, respectivamente.
Figura 6. 5 – Uso de controladores PI: Corrente estator da fase A (canal 2) e velocidade do rotor
(canal 1- 450rpm/volt), com velocidade de referência igual a 250rpm e carga nula.
Figura 6. 6 – Uso de controladores PI: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1 - 450rpm/volt), com velocidade de referência igual a 1800rpm e carga nula.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
83
A Figura 6.7 mostra a resposta do sistema de acionamento com controladores PI, para uma
velocidade de referência de 900rpm e carga nula. Já a Figura 6.8 apresenta a resposta a uma
velocidade de 1800rpm, com a inclusão de uma carga de aproximadamente 0,67Nm a,
aproximadamente, 1,8s após a partida da máquina.
Observa-se que na resposta de velocidade do motor com controle PI, onde ocorre a perturbação
de carga, que a ação do controle consegue, após um determinado tempo, manter a velocidade de
referência desejada.
Figura 6. 7 - Uso de controladores PI: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1- 450rpm/volt), com velocidade de referência igual a 900rpm e carga nula.
Inserção de carga.
Figura 6. 8 - Uso de controladores PI: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1- 450rpm/volt), com velocidade de referência igual a 1800rpm: Inclusão de carga de
0,67Nm.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
84
A seguir, são apresentadas as respostas para sistema de acionamento da máquina de indução com
controle em modos deslizantes, para as três superfícies projetadas no capítulo 4. As Figuras 6.9 e
6.10 apresentam as respostas de corrente e velocidade, respectivamente, a 900rpm e 1800rpm e
inserção da carga nominal do motor em aproximadamente 1,25s. Pode-se observar que a
velocidade do motor permanece praticamente no valor de referência, mostrando a robustez do
controle MD ao distúrbio de carga.
Inserção de carga.
Figura 6. 9 – Uso de controladores MD: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1- 450rpm/volt), com velocidade de referência igual a 900rpm: Inclusão de carga de
0,67Nm.
Inserção de carga.
Figura 6. 10 – Uso de controladores MD: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1 - 450rpm/volt), com velocidade de referência igual a 1800rpm: Efeitos da inclusão
e exclusão da carga de 0,67Nm.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
85
A Figura 6.11 apresenta a resposta do controle em modos deslizantes sem carga para uma
velocidade de referência igual a 250rpm. Observa-se na resposta de velocidade, o chattering, com
a presença significativa de oscilações na velocidade do motor em regime permanente. Na Figura
6.9, também se observou o chattering.
Figura 6. 11 – Uso de controladores MD: Corrente de estator da fase A (canal 2) e velocidade do
rotor (canal 1 - 450rpm/volt), com velocidade de referência igual a 250rpm e carga nula.
A fim de se avaliar a robustez do controle à variação paramétrica, realizaram-se testes variando o
parâmetro nominal das resistências do rotor e estator em torno de +20%, simulando um amento
de temperatura no enrolamento ou um erro na estimação deste parâmetro. A Figura 6.12
demonstra que não ocorreram variações significativas na resposta de velocidade ou corrente,
mostrando a robustez do sistema à variação de parâmetros.
Figura 6. 12 – Controlador MD: Corrente de estator da fase A (canal 2) e velocidade (canal 1 450rpm/volt) a 900rpm, sem carga e variação das resistências do rotor e do estator.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
86
O algoritmo em modos deslizantes foi modificado, introduzindo-se a função relé com saturação e
o termo integral na saída da superfície que gera a componente em quadratura da tensão de estator.
As Figuras 6.13, 6.14 e 6.15 mostram os resultados obtidos. Observa-se que a robustez às
variações de carga se manteve e ocorreu significativa redução no chattering.
Figura 6. 13 – Controlador MD modificado: Corrente de estator da fase A (canal 2) e velocidade
(canal 1 - 450rpm/volt) a 250rpm, sem carga.
Inserção de carga.
Figura 6. 14 – Controlador MD modificado: Corrente de estator da fase A (canal 2) e velocidade
(canal 1 - 450rpm/volt) a 900rpm, com carga de 0,67Nm.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
87
Inserção de carga.
Figura 6. 15 – Controlador MD modificado: Corrente de estator da fase A (canal 2) e velocidade
(canal 1 - 450rpm/volt) a 1800rpm com carga de 0,67Nm.
A Figura 6.16 mostra um comparativo do chattering sobre a variável controlada, entre os dois
controles em modos deslizantes propostos, ambos a uma velocidade de 900rpm. Novamente,
observa-se uma redução significativa do chattering. A Figura 6.17 mostra a tensão fase-fase
sintetizada pelo inversor.
a)
b)
Figura 6. 16 – a) Detalhe do chattering na velocidade (canal 1) e corrente (canal 2) para o
controle em MD. b) Detalhe do chattering na velocidade (canal 1) e corrente (canal 2) para o
controle em MD modificado.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
88
Figura 6. 17 – Tensão fase-fase sintetizada pelo inversor.
6.4 Conclusão
Neste capítulo, foi apresentado o protótipo desenvolvido através do DSP dsPIC30F3011 e o drive
IRAMS10UP60A. Foram apresentados os resultados experimentais para o controle vetorial do
motor de indução, utilizando-se o algoritmo PI e algoritmos em modos deslizantes.
Os resultados encontrados com o algoritmo PI demonstraram que quando a carga é inserida
ocorrem variações na velocidade, mas, também, que a ação de controle é capaz de restabelecer o
controle na velocidade desejada.
Para o controle em modos deslizantes, a presença de variações na velocidade quando a carga é
inserida é desprezível, demonstrando a robustez do controle aos distúrbios de carga. Também foi
possível mostrar que, quando alteradas as resistências do rotor e estator dentro de uma
determinada faixa, o controle garante a resposta de velocidade esperada.
Também se observou que a mudança na lei de controle, relé com saturação e, o uso do termo
integral trouxeram reduções significativas na amplitude e frequência das oscilações causados pelo
chattering sem perda de robustez do controle em modos deslizantes.
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
89
Conclusão e Propostas de Continuidade
Este trabalho apresentou a técnica de controle vetorial de velocidade da máquina de indução por
orientação indireta de campo com o uso de controladores em modos deslizantes. Um estudo dos
fundamentos teóricos da técnica de controle vetorial e dos modos deslizantes foi realizado para o
desenvolvimento dos projetos das superfícies de chaveamento. A partir das condições de
existência e convergência dos modos deslizantes, mostraram-se as expressões para o cálculo dos
ganhos de chaveamento e constante de tempo dos controladores.
Foram propostas três superfícies de chaveamento para o controle em modos deslizantes da
máquina de indução, uma para velocidade, a segunda para a corrente em quadratura do estator e a
última para o fluxo magnético do rotor. Foram abordadas técnicas para redução do chattering,
fenômeno intrínseco ao controle em modos deslizantes, como o uso de filtros passabaixas,
mudança na lei de chaveamento para o tipo relé com saturação com o uso de termo integral na
entrada de excitação do motor.
Para mostrar a robustez do controle em modos deslizantes a distúrbios de carga e variação
paramétrica, utilizou-se de simulações via ambiente MatLab e de resultados experimentais a
partir da construção de um protótipo com o DSP dsPIC30F3011 da Microchip e do drive de
potência IRAMS10UP60A da IRF. Em ambos, obtiveram-se resultados satisfatórios com relação
à performance do acionamento.
Nota-se que a alternativa proposta para redução do chattering, utilizando a estratégia da função
de saturação com o termo integral na saída da superfície s3, amenizou de forma significativa os
seus efeitos, mas não o eliminou por completo.
Os resultados obtidos demonstram a robustez do controle em modos deslizantes e, como proposta
de continuidade para pesquisa, pretende-se estudar:
O controle de posição do motor de indução com o controle em modos deslizantes;
O uso do modo deslizante como observador de estado com o intuito de realizar o controle
vetorial do motor de indução sensorless;
CAPÍTULO 6. RESULTADOS EXPERIMENTAIS
90
Deseja-se também pesquisar técnicas que mantenham a robustez do sistema amenizando
ou eliminando os efeitos indesejáveis do chattering. Como proposta inicial pretende-se
investigar o uso do filtro passabaixa no projeto das superfícies.
Por fim, como contribuições principais do trabalho, destacam-se a implementação total do
controle vetorial do motor de indução utilizando um DSP de médio desempenho e de baixo custo,
possibilitando implementações práticas futuras e, uma metodologia para o cálculo de ganhos de
chaveamento e constante de tempo de convergência do controle em modos deslizantes para o
acionamento da máquina de indução.
REFERÊNCIAS BIBLIOGRÁFICAS
91
Referências Bibliográficas
[1] Brito. C.M.C. Análise da Qualidade de Energia Elétrica no Desempenho de um Motor de
Indução Trifásico e de seu Sistema de Acionamento sob Afundamentos de Tensão. Dissertação de
Mestrado, UFC, Ceará, 2005.
[2] Sarmiento, H. G., Estrada, E. Voltage Sag Study in the Industry with Adjustable-Speed Drives.
IEEE Industry Applications Magazine, v.2, n.1, Jan./Feb., p.16-19, 1996.
[3] Jr., I. A. R. Controle Vetorial (Fasorial) de um Motor Assíncrono usando DSPs. Dissertação
de Mestrado, UNISINOS, 2002.
[4] Vas, P. Vector Control Of Ac Machines. Oxford: Oxford Science Publications, 1a edição,
1990, cap.: 2-4.
[5] Boldea, I; Nasar, S. A. Vector Control of AC Drives. Florida: CRC Press, Inc., 1a edição,
1992, cap.: 1-4.
[6] Fitzgerald, A. E.; Jr., C. K.; Umans, S. D. Máquinas Elétricas com Introdução a Eletrônica
de Potência. São Paulo, Artmed, 6a edição, 2006, cap.: 10-11.
[7] Ferreira, S. B. Estudo e Avaliação de Estratégias de Controle Direto do Torque em Máquinas
de Indução. Dissertação de Mestrado PUC RS, 2004.
[8] Leonhard, W. 20 Years Field Orientation, 10 Years Digital Signal Processing with Controlled
AC Drives. Anais do XIII, CBA, Belém-Pa, Brasil, 1990.
[9] Vasconcelos, C. H. S. Desenvolvimento de Algoritmos de Estimação Robustos para
Acionamentos de Alto Desempenho. Dissertação de Mestrado, PUC Minas, 2006.
[10] Hung, J. Y. et al. Variable Structure Control: A Survey. IEEE Transactions on Industrial
Electronics, vol. 40, nº1, pp. 2-21, 1993
[11] Mendes, M. A. S.: Técnicas de Modulação em Largura de Pulsos Vetorial para Inversores
Multiníveis; Tese de Doutorado; UFMG; Minas Gerais; Brasil; 2000.
[12] Manfio, E.; Oliveira, F. C.; Marques, L. C. S. Implementação de Controladores para o Motor
de Indução em Plataforma de Ensaios. XVIII Congresso Regional de Iniciação Científica e
Tecnológica CRICTE 2003, Itajaí-SC, outubro, 2003, p. 1-5.
[13] Morais, F. G.. Controle Vetorial de Motores de Indução sem Sensor de Velocidade. Tese de
Doutorado ITA-SP, 2002.
[14] Jordão, R. G. Máquinas Síncronas. São Paulo. LTC/USP, 1980, 1ª edição, cap. 5-8.
[15] Peixoto, Z. M. A. A Estimação de Parâmetros e os Conversores Multiníveis com Capacitor
Flutuante no Acionamento de Máquinas de Indução. Tese de Doutorado UFMG-MG, 2000.
REFERÊNCIAS BIBLIOGRÁFICAS
92
[16] Kazmierkowski, M. P. Control Philosophies of PWM Inverter-Fed Induction Motors. 23rd
IECON International Conference, New Orlenas, LA, USA, v. 1, p. 16-26, setembro 1997.
[17] Peixoto, Z. M. A. Desenvolvimento de Observadores em Modos Deslizantes Aplicados à
Estimação de Posição, Velocidade e Força Contra Eletromotriz em Máquinas Síncronas a Imã
Permanentes. Dissertação de Mestrado UFMG, 1995.
[18] Cardoso, F. D. S., Martins, J. F., Pires, V. F. A Comparative Study of a PI, Neural Network
and Fuzzy Genetic Approach Controllers for an AC-Drivers. Proc. IEEE, p. 375-380, julho 1998.
[19] Chen, W.; Mehrdad, S. Novel Sliding Mode Observer for a Class of Uncertain Systems.
Proc. IEEE, p. 2622-2627, junho 2006.
[20] Yu, H; Özgüner, U. Adaptative Seeking Sliding Mode Control. Proc. IEEE, p. 4694-4699,
junho 2006.
[21] Veselić, B.; Milosavljević, C; D. P., Branislava; Mitić, D. Digitally Controlled Sliding
Mode Based Servo-System with Active Disturbance Estimator. Proc. of the 2006 International
Workshop on Variable Structure Systems, Alghero, Itália, p. 51-56, junho de 2006.
[22] Schofield, J. R. G. Variable Speed Drives Using Induction Motors and Direct Torque
Control. IEE Electric Power Applications, p. 1-5, 1998.
[23] Lee, Z. G.; Jeong, S. K.; You, J. S.; Yoon, J. S. Robust Control against Resistance for Speed
Sensorless Induction Motors. IEEE International Conference in Canadian, p. 444-449, maio
2005.
[24] Furtunato, Alex F. A.; Araújo, A. D.; Salazar, A. O. Controlador de Velocidade Usando
Modos Deslizantes Suaves para um Motor de Indução Trifásico. Revista Controle & Automação,
v. 12, n. 2, p. 148-155, junho/ julho/ agosto 2001.
[25] Agamy, M. S. Sliding Mode Control of Induction Motors with Minimized Control Effort: A
Comparative Study. IEEE International Conference in Canadian, p. 2237-2239, maio 2005.
[26] Lin, F. J.; Shen, P. H.; Hsu, S. P. Adaptive Backstepping Sliding Mode Control for Linear
Induction Motor Drive. IEE Proc. Electric Power App., v. 149, n. 3, maio 2002.
[27] Corrêa, M. B. R.; Jacobina, C. B.; Santos, P. M.; Santos, E. C.; Lima, A. M. N. Sensorlees
IFOC for Single-Phase Induction Motor Drive System. IEEE International Conference in
Canadian, p. 162-166, maio 2005.
[28] Reddy, T. B.; Subbarayudu, D.; Amarnath, J. Robust Sliding Mode speed controller for
hybrid SVPWM Based Direct Torque Control of Induction Motor. World Journal of Modelling
and Simulation, v. 3, n. 3, p. 180-188, março 2007.
93
REFERÊNCIAS BIBLIOGRÁFICAS
[29] Zhihong, M.; Yu, X. H. Terminal Sliding Mode Control of MIMO Linear Systems. Proc.
IEEE, p. 4619-4624, janeiro 1996.
[30] Wang, C.; Huang, Z.; Zhang, K. Nonsingular Terminal Sliding Mode Control for a Class of
Time Delay Systems. Proc. IEEE, Automatica, vol. 38, issue. 12, p. 2159-2167, Dezembro 2002.
[31] Cunha, J. P. V. S.; Hsu, L.; Costa, R.; Lizarralde, F. Output-Feedback Model-Reference
Sliding Mode Control of Uncertain Multivariable Systems. IEEE Transactions on Automatic
Control, v. 48, n. 12, dezembro 2003.
[32] Mengoni, M.; Zarri, L.; Tani, A.; Serra, G.; Casadei, D. Stator Flux Vector Control of
Induction Motor Drive in the Field Weakening Region. IEEE Transactions on Power Electronics,
v. 23, n. 2, março 2008.
[33] Maiti, S.; Chakraborty, C.; Hori, Y.; Ta, M. C. Model Reference Adaptative ControllerBased Rotor Resistance and Speed Estimation Technique Vector Controlled Induction
MotorDrive Utilizing Reactive Power. IEEE Transactions on Power Electronics, v. 55, n. 2,
fevereiro 2008.
[34] Yongchang, Z.; Zhengming, Z.; Yingchao, Z.; Gaosheng, S. A Full Sliding Mode Sensorless
Control of Tree-Level Inverter-Fed Induction Motors. IEEE Power Eletronics Specialists
Conference, p. 2825-2830, junho 2008.
[35] Perruquetti, W.; Babort, J. P. Sliding Mode Control in Engineering. New York: Marcel
Dekker, Inc, 1a edição, 2002.
[36] Utkin, V.I. Sliding Mode Control and their Applications in Variable Structures Systems.
Moscow, Soviet Union: MIR Publishers, 1978.
[37] Freitas, F. M. Controle em Modos Deslizantes de Servomecanismos Motor Síncrono a Ímãs
Permanentes. Dissertação de Mestrado UFMG, 1995.
[38] OGATA, K. Engenharia de Controle Moderno, Prentice – Hall do Brasil, Trad. Bernado
Severo. 3ª Ed., 2000.
[39] Data Sheet dsPI30F3011 - DS70141e. Acessado 10/10/2008 e, disponível em:
http://ww1.microchip.com/downloads/en/DeviceDoc/70141e.pdf
[40] Data Sheet
IRAMS10UP60. Acessado 10/10/2008
http://www.irf.com/product-info/datasheets/data/irams10up60a.pdf
e,
disponível
em:
ANEXOS
Anexos
Anexo A
Dados de Placa e Parâmetros da Máquina:
Dados de placa:
Potência: 0,16 cv;
Tensão nominal: 220 V;
Corrente nominal: 0,9A;
Número de polos: 4;
Frequência: 60 Hz;
Velocidade nominal: 1730 rpm;
Classe: B;
Conjugado Nominal: 0,67Nm.
Parâmetros
Resistência de estator (Rs): 52 Ω;
Resistência de rotor (Rr): 67,3 Ω;
Indutância própria de estator (L1s): 0,0694 H;
Indutância própria de rotor (L1r): 0,0713 H;
Indutância Mútua (Lm): 1,323 H;
Coeficiente de Fricção (F): 0,0002 Nms;
Momento de Inércia (J): 0,0032 kgm2.
94
APÊNDICES
Apêndices
Apêndice A
Circuito da Interface de Potência Projetada
95
APÊNDICES
96
Apêndice B
O Modelo Bifásico do Motor de Indução Trifásico
A modelagem da máquina de indução é obtida a partir de seu circuito equivalente trifásico, que
envolve um complexo sistema de equações acopladas entre si e de parâmetros variantes no
tempo. Para esse estudo, supõe-se distribuição senoidal fluxo magnético no entreferro, estator e
rotor cilíndrico e ausência de saturação magnética no núcleo.
A partir destas premissas, é obtido o modelo do motor em termos da Teoria da Dupla Reação de
Blondel [14], a mesma aplicada no estudo de máquinas síncronas. O objetivo da aplicação desta
técnica é simplificar o modelo do motor, bem como desacoplar as componentes de corrente e
tensão que geram o fluxo e o conjugado eletromagnético no motor, de forma análoga ao motor de
corrente contínua.
São mostradas as equações de tensão e corrente do motor de indução em termos dos vetores
espaciais dos fluxos eletromagnéticos de estator e rotor, em um sistema de eixos de referência
fixo no estator, ortogonais entre si e denominados eixo direto e eixo em quadratura [4]. Em
seguida, a equação do conjugado eletromagnético, com base nas componentes de corrente de eixo
direto e em quadratura, é indicada.
Para uma maior simplificação, será considerado um motor de indução trifásico de dois polos,
com rotor em gaiola de esquilo, enrolamentos do estator equilibrados e defasados entre si de 120o
e efeitos de saturação magnética desprezíveis. As perdas elétricas nos enrolamentos de rotor,
estator e núcleo também são desconsiderados.
Na Figura B.1 ilustra um motor de indução com os enrolamentos das fases a, b e c para o rotor
(ra, rb, rc) e estator (sa, sb, sc). Nesta, é representado o eixo magnético da fase a do estator, eixo
direto (α) e, perpendicular a ele o eixo em quadratura (β), também são vistos o eixo magnético da
fase a do rotor (d) e perpendicular ao mesmo outro eixo em quadratura (q).
97
APÊNDICES
Os sistemas de referência do rotor (dq) e do estator (αβ) estão deslocados espacialmente de um
ângulo θr, e a força magnetomotriz do estator (fs), está deslocada de um ângulo θ em relação ao
eixo magnético da fase A do estator (sa) em um determinado instante. A velocidade angular das
grandezas do rotor ωr será determinada segundo a equação B.1, que é mostrada na Figura B.1.
ωr =
dθ r
dt
(B.1)
Como os enrolamentos da máquina são considerados equilibrados e a alimentação dos mesmos é
feito por tensões senoidais equilibradas, a componente de seqüência zero de corrente do estator e
rotor serão nulos, então as equações B.2 e B.3 podem ser escritas como:
ir 0 (t ) = ira (t ) + irb (t ) + irc (t ) = 0
(B.2)
is 0 (t ) = isA (t ) + isB (t ) + isC (t ) = 0
(B.3)
As equações B.2 e B.3 são respectivamente as componentes de seqüência zero do rotor e do
estator.
Figura B. 1 – Motor de indução trifásico elementar simétrico.
Para fins de estudo deste trabalho será utilizado o sistema de referência αβ0 para as deduções de
corrente, tensão e fluxo do estator e, dq0 para corrente, tensão e fluxo do rotor.
98
APÊNDICES
B.1 Vetor Espacial de Força Magnetomotriz, Corrente e Tensão de Estator
Assumindo que ocorre dispersão de fluxo magnético no enrolamento de estator, a força
magnetomotriz será proporcional a um número efetivo de espiras do enrolamento de estator Nse e
das componentes de corrente relação ao eixo direto. Em B.4 e B.5 são mostradas as equações:
f s (θ , t ) = N se [isA (t ) cosθ + isB (t ) cos(θ − 2π / 3) + isC (t ) cos(θ − 4π / 3)]
N se = N s k ws
(B.4)
(B.5)
Na equação B.5, Ns e kws é respectivamente o número de espiras e o fator de enrolamento do
enrolamento de estator.
A equação B.4 pode ser escrita na forma complexa como:
f s (θ , t ) =
3
2
N se Re [isA (t ) + aisB (t ) + a 2isC (t )]e − jθ
2
3
(B.6)
Da equação B.6 tem-se o vetor espacial de corrente do estator, dado por:
2
is (t ) = [isA (t ) + aisB (t ) + a 2isC (t )] = is e − jθ
3
(B.7)
Na equação B.7, is é o módulo do vetor espacial de corrente de estator deslocado do ângulo θ
em relação à referência fixa no estator, que neste caso é tomada como o eixo magnético da fase A
do estator, ou eixo direto (α). O vetor espacial de corrente de estator também pode ser escrito em
relação ao sistema de referência αβ0, neste caso is (t ) pode ser escrito como:
is = isα + jisβ
(B.8)
APÊNDICES
99
A equação B.8 mostra como é possível transformar uma máquina de indução trifásica em sua
equivalente bifásica através da Teoria da Dupla Reação de Blondel [14], as componentes de eixo
direto isα (t ) e de eixo em quadratura isβ (t ) podem ser escritas como:
1
1
isα = c isA − isB − isC
2
2
isβ = c
3
( isB − isC )
2
(B.9)
(B.10)
Nas equações B.9 e B.10, c é uma constante que determina equilíbrio (invariância) do sistema
[4]. Para sistema não-invariante c = 2
3
e, para sistema invariante c =
2 . Desta forma,
3
considerando o sistema não invariante, as equações B.9 e B.10 ficam:
isα =
2
1
1
isA − isB − isC
3
2
2
(B.11)
3
( isB − isC )
3
(B.12)
isβ =
Os vetores espaciais de corrente de estator nas componentes de eixo direto isα e em quadratura
isβ descritas nas equações B.11 e B.12, também podem ser entendidos como a composição da
corrente is nos eixos real (eixo direto) e imaginário (eixo em quadratura).
1
1
2
2
isα = Re ( isA + aisB + a 2isC ) = isA − isB − isC
2
2
3
3
3
2
isβ = Im ( isA + aisB + a 2isC ) =
( isB − isC )
3
3
(B.13)
(B.14)
A Figura B.2 ilustra a projeção do vetor espacial de corrente de estator em termos de suas
componentes por fase em relação ao sistema de referência αβ0.
100
APÊNDICES
Como considerado anteriormente, a componente de seqüência zero da corrente de estator é nula.
De uma forma mais genérica a equação B.3 pode ser escrita como sendo:
is 0 (t ) = c1 [isA + isB + isC ]
(B.15)
Figura B. 2 – Projeção do vetor espacial da corrente de estator.
Na equação B.15 c1 é uma constante podendo assumir para sistemas não-invariantes c1 = 1
para sistemas invariantes c1 = 3
3
3
e,
[4]. Desta forma, considerando o sistema não invariante, a
equação B.15 será expressa como:
is 0 =
1
[isA + isB + isC ]
3
(B.16)
O conjunto das equações B.13, B.14 e B.16 transformam os vetores espaciais de corrente de
estator do motor trifásico de enrolamentos simétricos e equilibrados, em uma máquina bifásica
equivalente com sistema de referência fixo no estator (αβ0). A equação B.17 na forma matricial
101
APÊNDICES
mostra esta transformação (a, b, c para αβ0), também conhecida como a Transformada de Clarke
[3][25].
1 2
is 0
2
isα = 3 1
0
isβ
1 2 isA
−1 2 −1 2 isB
3 2 − 3 2 isC
12
(B.17)
A equação B.18 ilustra a Transformada Inversa de Clarke:
1
0 is 0
isA 1
i = 1 −1 2
3
2
sB
isα
isC 1 −1 2 − 3 2 isβ
(B.18)
De modo semelhante do que foi desenvolvido para o vetor espacial de corrente de estator, o vetor
espacial de tensão de estator pode ser expressa de acordo com a equação B.19.
2
u s = [usA + ausB + a 2u sC ] = usα + jusβ
3
(B.19)
As componentes de eixo direto e em quadratura do vetor espacial de tensão de estator são
respectivamente:
2
u sα = Re ( usA + ausB + a 2u sC ) =
3
2
1
1
usA − u sB − usC
3
2
2
3
2
usβ = Im ( usA + ausB + a 2usC ) =
( usB − usC )
3
3
(B.20)
(B.21)
Considerando que as tensões das fases a, b e c são equilibradas, a componente de seqüência zero
da tensão de estator será nula. De forma análoga, tem-se um sistema não invariante fazendo com
que a componente de seqüência zero para tensão de estator seja:
APÊNDICES
us 0 =
1
[usA + usB + usC ]
3
102
(B.22)
Portanto, o resultado é novamente a transformação de uma máquina trifásica em uma
representação bifásica. A mesma matriz de transformação utilizada para o vetor de corrente
espacial is , também é utilizada para o vetor tensão u s para a equivalência abordada. A equação
B.23 na forma matricial ilustra a passagem do sistema trifásico para o bifásico (αβ0), enquanto
que a equação B.24 mostra a transformação inversa.
1 2
us 0
2
usα = 3 1
0
u s β
1 2 usA
−1 2 usB
3 2 − 3 2 usC
12
−1 2
1
0 us 0
usA 1
u = 1 −1 2
3
2
sB
usα
usC 1 −1 2 − 3 2 usβ
(B.23)
(B.24)
B.2 Vetor Espacial de Força Magnetomotriz, Corrente e Tensão de Rotor
Para análise do vetor de força magnetomotriz de rotor (fr), considere a Figura B.3 que ilustra os
sistemas de referência do estator (αβ0) e do rotor (dq0). O sistema de referência do rotor por sua
vez se move como uma velocidade ωr em relação à referência fixa do estator segundo a equação
B.1. O ângulo θr mostra o deslocamento espacial entre os sistemas de referência do rotor e estator
e, αr é o ângulo entre fr e o eixo (d) do sistema de referência do rotor que também se move com a
velocidade síncrona ωr. O ângulo entre a força magnetomotriz do rotor e o sistema de referência
do estator é α r' .
103
APÊNDICES
Para o estudo dos vetores de força magnetomotriz, tensão e corrente do rotor, serão considerados
que os enrolamentos do mesmo são equilibrados, ou seja, a componente de seqüência zero de
corrente e de tensão são nulas, como expressos nas equações B.25 e B.26.
ir 0 =
1
[irA + irB + irC ] = 0
3
(B.25)
ur 0 =
1
[urA + urB + urC ] = 0
3
(B.26)
Figura B. 3 – Relação entre os sistemas de referência do rotor (rotativo) e estator (fixo)
Considerando a referência do rotor (dq0), a equação de força magnetomotriz de rotor pode ser
expressa segundo a equação B.27 como sendo:
f r (α r , t ) = N re [irA (t ) cos α r + irB (t ) cos(α r − 2π / 3) + irC (t ) cos(α r − 4π / 3)]
N re = N r k wr
(B.27)
(B.28)
Na equação B.28, Nr e kwr é respectivamente o número de espiras e o fator de enrolamento do
enrolamento de rotor.
Na equação B.29 tem-se a forma complexa da força magnetomotriz do rotor.
f r (α r , t ) =
2
3
N sr Re [irA (t ) + airB (t ) + a 2irC (t )]e − jα r
2
3
Na equação B.30 tem-se o vetor espacial de corrente do rotor, dado por:
(B.29)
APÊNDICES
2
ir (t ) = [irA (t ) + airB (t ) + a 2irC (t )] = ir e − jα r
3
104
(B.30)
Na equação B.30, ir é o módulo do vetor espacial de corrente de rotor deslocado do ângulo α r
em relação à referência girante do rotor. O vetor espacial de corrente do rotor também pode ser
escrito em relação ao sistema de referência dq0, neste caso ir (t ) pode ser escrito como:
ir = ird + jirq
(B.31)
De forma análoga a decomposição do vetor espacial de corrente e estator, o vetor espacial de
corrente de rotor também pode ser realizada nas componentes ird e irq , uma orientada segundo o
eixo magnético a fase ra (eixo d) e, a outra perpendicular a este (eixo q). Estas componentes
podem ser escritas segundo as equações B.32 e B.33 respectivamente como sendo:
1
1
2
2
ird = Re ( irA + airB + a 2irC ) = irA − irB − irC
2
2
3
3
3
2
irq = Im ( irA + airB + a 2irC ) =
( irB − irC )
3
3
(B.32)
(B.33)
Na forma matricial, equação B.34, o conjunto das equações B.25, B.32 e B.33, mostram a
transformação de Clarke para o vetor de corrente de rotor, remetendo novamente a equivalência
entre as uma máquina de indução trifásica e uma máquina bifásica [3][25].
1 2
ir 0
2
ird = 3 1
0
irq
1 2 irA
−1 2
−1 2 irB
3 2 − 3 2 irC
12
A equação B.35 ilustra a Transformada Inversa de Clarke para as correntes de rotor:
(B.34)
105
APÊNDICES
1
0 ir 0
irA 1
i = 1 −1 2
3
2
rB
ird
irC 1 −1 2 − 3 2 irq
(B.35)
De modo semelhante do que foi desenvolvido para o vetor espacial de corrente de rotor, o vetor
espacial de tensão de rotor pode ser expressa de acordo com a equação B.36. É importante
observar que como o rotor considerado é de gaiola, as tensões (aplicada aos mesmos) terminais
dos seus enrolamentos são nulas.
2
u r = [urA + aurB + a 2urC ] = urd + jurq
3
(B.36)
As componentes de eixo direto do roto (eixo d) e em quadratura (eixo q) do vetor espacial de
tensão de rotor são respectivamente:
2
urd = Re ( urA + aurB + a 2urC ) =
3
2
1
1
urA − urB − urC
3
2
2
3
2
urq = Im ( urA + aurB + a 2urC ) =
( urB − urC )
3
3
(B.37)
(B.38)
Considerando que as equações B.26, B.37 e B.38, a Transformada direta (equação B.39) e
inversa (equação B.40) de Clarke pode ser escrita para o vetor espacial de tensão de rotor
segundo o sistema de referência dq0.
1 2
u r 0
2
urd = 3 1
urq
0
1 2 urA
−1 2 −1 2 urB
3 2 − 3 2 urC
12
(B.39)
106
APÊNDICES
1
u rA 1
u = 1 −1 2
rB
u rC 1 −1 2
0
ur 0
3 2 u rd
− 3 2 u rq
(B.40)
Os vetores espaciais de força magnetomotriz, tensão e corrente do rotor podem ser expressos em
'
relação ao referencial fixo no estator (eixo αβ0). Considerando a Figura B.3, onde α r é o ângulo
entre o vetor fr e o eixo direto (α), os vetores podem ser expressos como:
f r' (α r' , t ) =
'
3
2
N sr Re [irA (t ) + airB (t ) + a 2irC (t )]e− jα r
2
3
(B.41)
O apostrofe sobrescrito na equação B.41 é para indicar que o vetor espacial força magnetomotriz
de rotor está referenciado ao sistema α referência estacionário do estator. Da equação B.41 tem-se
o vetor espacial de corrente do rotor referenciado ao sistema αβ0, dado por:
'
2
ir ' (t ) = [irA (t ) + airB (t ) + a 2irC (t )] = ir e − jα r
3
(B.42)
O vetor espacial de tensão do rotor no referencial do estator pode ser expresso como:
'
2
u r = [urA + aurB + a 2urC ] = urd + urq
3
(B.43)
A Figura B.4 ilustra os vetores espaciais de corrente de rotor nos sistemas de referência fixo
(estacionário) do estator e girante (rotativo) do rotor. Nesta figura os vetores ir ' e ir estão
decompostos em seus respectivos sistemas de referência como irα , ir β e ird , irq respectivamente.
107
APÊNDICES
'
Figura B. 4 – Decomposição dos vetores de corrente de rotor ( ir e ir ) na referência estacionária
(fixa) do estator e rotativa (girante) do rotor.
B.3 Equações de Tensão e Corrente do Motor de Indução no Referencial dq0
Para o desenvolvimento do controle por orientação indireta de campo é necessário desenvolver as
equações das grandezas do estator em um referencial que não dependa do tempo e da velocidade.
Desta forma, orienta-se o referencial dq0 com algum fluxo magnético da máquina. Neste trabalho
o nosso sistema de coordenadas está alinhado com o fluxo magnético do rotor, que se move com
a velocidade ωr ao longo do tempo. Portanto a corrente e a tensão do estator escritas neste
referencial não serão dependentes do tempo ou da velocidade. As equações a seguir mostram
como elas podem ser escritas.
us' = usd + jusq
(B.44)
is' = isd + jisq
(B.45)
Onde as componentes de tensão e corrente do estator no referencial dq0 do rotor, como
decomposto na Figura B.4, são dadas por:
isd cos θ r
i =
sq sin θ r
− sin θ r isα
cos θ r is β
(B.46)
u sd cos θ r
u =
sq sin θ r
− sin θ r u sα
cos θ r u sβ
(B.47)
APÊNDICES
108
Combinando as equações B.34 e B.46, tem-se a Transformação de Park para a corrente de estator.
A equação B.48 mostra como se podem passar as grandezas de um referencial trifásico
estacionário para o sistema de eixos ortogonais movendo-se com uma velocidade angular ωr [24].
De forma análoga, a transformação também pode ser aplicada a tensão de estator, como é
mostrada na equação B.49.
is0
12
12
12
isA
2
isd = 3 cos(θr ) cos(θr − 2π 3) cos(θr + 2π 3) isB
isq
−sin(θr ) −sin(θr − 2π 3) −sin(θr + 2π 3)
isC
(B.48)
us0
12
12
12
usA
2
usd = 3 cos(θr ) cos(θr − 2π 3) cos(θr + 2π 3) usB
usq
−sin(θr ) −sin(θr − 2π 3) −sin(θr + 2π 3) usC
(B.49)
A partir das equações B.35 e B.47, obtêm-se as transformações inversas para as correntes e
tensões de estator.
sin(θr )
cos(θr ) is0
isA
1
i = 2 1 sin(θ − 2π 3) cos(θ − 2π 3) i
r
r
sB 3
sd
isC
1 sin(θr + 2π 3) cos(θr + 2π 3) isq
(B.50)
sin(θr )
cos(θr ) us0
usA
1
2
u = 1 sin(θ − 2π 3) cos(θ − 2π 3) u
r
r
sB 3
sd
usC
1 sin(θr + 2π 3) cos(θr + 2π 3) usq
(B.51)
Para realizar as transformações mostradas nas equações B.48 e B.49 é necessário o conhecimento
do ângulo θ r , que pode ser calculado a partir da velocidade mecânica do rotor e da velocidade de
escorregamento.
ωr = ωsl + pωm
θ r = ∫ (ωsl + pωm ) dω + θ 0
Onde:
ωr = Velocidade angular do vetor fluxo magnético do rotor (rad/s).
(B.52)
(B.53)
109
APÊNDICES
ωsl = Velocidade de escorregamento (rad/s).
p = Número de pares de polos.
ωm = Velocidade mecânica do rotor (rad/s).
θ 0 = Ângulo inicial entre o sistema de referencial estático αβ0 e o sistema rotativo dq0 (rad).
Na prática, o ângulo θ0 será considerado como nulo, pois com o tempo um erro neste tenderá a
zero [4][6][22]. A velocidade de escorregamento ωsl será calculada a partir das relações de
tensão e corrente da máquina em uma determinada referência.
A seguir têm-se as equações de tensão de rotor e estator desenvolvidas para o sistema de
referência rotativo dq0 [4][5].
u sd = Rs isd +
u sq = Rs isq +
d λsd
− ωr λsq
dt
d λsq
urd = 0 = Rr ird +
urq = 0 = Rr irq +
dt
+ ωr λsd
d λrd
− (ωr − pωm )λrq
dt
d λrq
dt
Onde:
Rs = Resistência do enrolamento do estator (Ω).
Rr = Resistência do enrolamento do rotor (Ω).
λsd = Fluxo do estator de eixo direto (Wb).
λsq = Fluxo do estator de eixo em quadratura (Wb).
λrd = Fluxo do rotor de eixo direto (Wb).
λrq = Fluxo do rotor de eixo em quadratura (Wb).
+ (ωr − pωm )λrd
(B.54)
(B.55)
(B.57)
(B.58)
110
APÊNDICES
As equações de fluxo de estator e rotor segundo o referencial dq0 são dadas por [4][5]:
λsd = Lsisd + Lmird
(B.59)
λsq = Lsisq + Lmirq
(B.60)
λrd = Lr ird + Lmisd
(B.61)
λrq = Lr irq + Lmisq
(B.62)
Onde:
Lm = Indutância mútua (H).
Ls = Indutância própria do estator (H).
Ls = Lm + Ls1
(B.63)
Lr = Lm + Lr 2
(B.64)
Ls1 = Indutância de dispersão do estator (H).
Lr = Indutância própria do rotor (H).
Lr2 = Indutância de dispersão do rotor (H).
O conjugado eletromagnético produzido pela máquina em função das componentes de eixo
direto e em quadratura no referencial rotativo do rotor pode ser expresso segundo as seguintes
equações [4][5][6][15]:
Te =
Te =
3
2
3
p (λsd isq − λsqisd )
2
(B.65)
L
p m
Lr
(B.66)
(λrd irq − λrqird )