F6D370 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
PRIMEIRA PROVA DE CONTROLE II – PRIMEIRO SEMESTRE DE 2012 (09/05/2012)
1) Para um sistema canal direto G(z) e com realimentação H(z) = 1, taxa de amostragem 0.1s.
Y(z)
X(z)
G(z)
H(z)
K
DICA: zero em malha aberta em -1
a) Em
função
da
equação
a
diferenças
y[k+3]+0.4y[k+2]+0.1Ky[k+1]+(0.1K-0.128)y[k]
do
sistema
em
=0.1x[k+1]+0.1x[k],
malha
qual
fechada,
o
lugar
dada
das
raízes
sistema? (1,5)
Solução:
A equação em malha fechada pode ser obtida segundo a equação a diferenças:
Y(z)z3+0.4Y(z)z2+0.1KY(z)z+Y(z)(0.1K-0.128) =0.1X(z)z+0.1X(z)
Assim: Y(z)/X(z) = 0.1(z+1)/(z3+0.4z2+0.1Kz+0.1K-0.128)
Como as raízes da equação característica z3+0.4z2+0.1Kz+0.1K-0.128=0 para k->0 serão
dadas por z3+0.4z2-0.128=0, tem-se os pólos da da função de transferência em malha aberta:
-0.4000 + 0.4000i
-0.4000 - 0.4000i
0.4000
Por outro lado, as raízes da equação característica z3+0.4z2+0.1Kz+0.1K-0.128=0 para k->∞ serão
dadas por 0.1Kz+0.1K=0, tem-se o zero da da função de transferência em malha aberta:
-1
Assim o lugar das raízes será:
por:
do
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Root Locus
5
4
3
2
Imaginary Axis
1
x
0
0
x
x
-1
-2
-3
-4
-5
-1.5
-1
-0.5
0
Real Axis
b) Qual o comando matlab para calcular a saída do sistema para K = 4? (1,0)
Solução:
Considerando uma entrada sequencia degrau unitário:
Para ganho 4, Y(z)/X(z) = 0.1(z+1)/(z3+0.4z2+0.1Kz+0.1K-0.128),
fica Y(z)/X(z) = 0.1(z+1)/(z3+0.4z2+0.4z+0.4-0.128)
s = tf('z')
g = 0.1*(z+1)/(z^3+0.4*z^2+0.4*z+0.4-0.128)
step(g)
0.5
1
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Step Response
0.16
0.14
0.12
Amplitude
0.1
0.08
0.06
0.04
0.02
0
0
0.5
1
1.5
2
2.5
Time (sec)
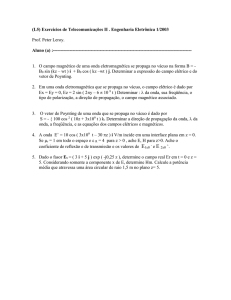
c) Para K = 4 determine as raízes da equação característica, bem como tempo de acomodação (2%) do
sistema. (1,0)
Solução:
As raizes da equação z3+0.4z2+0.4z+0.2720=0, obtida para k = 4, são as raízes da equação
caracterítica:
0.0788 + 0.6940i
0.0788 - 0.6940i
-0.5576
De outro modo:
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Root Locus
5
4
3
System: gz
Gain: 4
Pole: 0.0762 + 0.695i
Damping: 0.238
Overshoot (%): 46.3
Frequency (rad/sec): 15
2
Imaginary Axis
1
0
-1
-2
System: gz
Gain: 4
Pole: -0.557
Damping: 0.183
Overshoot (%): 55.7
Frequency (rad/sec): 32
-3
-4
-5
-1.5
-1
-0.5
0
0.5
1
Real Axis
Mapeando em s, usando s1 = ln(z1)/T e z1 =0.0788 + 0.6940i
s1 =
-3.5888 +14.5774i
De onde ξ = 0.24 e wn = 15 rad/s
ta(2%) = 4/zwn = 1.11s
d) Para qual valor de ganho K a saída Y(z) tenderá ao valor 0.5 (entrada sequência degrau) ? (1.0)
Solução:
Usando o teorema do valor final:
G(z)
0.1( z 1)
lim
z 1 1 KG(z)H(z)
z 1 3
2
z 0.4 z 0.1Kz 0.1K 0.128
0.2
0.2
1 0.4 0.1K 0.1K 0.128 1.272 0.2 K
lim
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Logo: 1.272+0.2K = 0.4 => k = -4.3600
De fato:
>> f = 0.1*(z+1)/(z^3+0.4*z^2-0.128)
>> step(feedback(f,-4.36))
Gera a curva:
Step Response
0.5
0.45
0.4
0.35
Amplitude
0.3
0.25
0.2
0.15
0.1
0.05
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Time (sec)
De outro modo, não há valor de K>0 que permita uma saída com o valor desejado.
e) Pelo critério de Jury determine a faixa de estabilidade do sistema, considerando que o pólo real em
malha aberta (em 0.4) foi eliminado. (1,0)
Considerando a equação característica simplificada:
1+0.1K(z+1)/((z +0.4 + 0.4j)(z +0.4 + 0.4j)) =0
A função de transferência em malha aberta:
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
0.1( z + 1)
-----------------z^2 + 0.8 z + 0.32
Root Locus
2
1.5
1
System: gz
Gain: 6.74
Pole: 0.0603 + 0.993i
Damping: 0.00366
Overshoot (%): 98.9
Frequency (rad/sec): 15.1
Imaginary Axis
0.5
0
-0.5
-1
-1.5
-2
-5
-4
-3
-2
-1
0
1
Real Axis
2) Dado o sistema com canal direto G(z) = (z-0.2)/ (10z2 -10z +5), canal de retroação unitária, T = 1s:
a) Apresente o
derivativo.(1,5)
Solução:
Sistema original:
lugar
das raízes
equivalente do
sistema, necessário
para o
cálculo
do
ganho
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Root Locus
1
0.8
0.6
Imaginary Axis
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-1.5
-1
-0.5
0
0.5
1
Real Axis
K
K
(k d )z d
p T
T para kp = 1 e taxa de amostragem T = 1:
PD(z)
z
G(z)
( z 0.2)
(10z 2 10 z 5)
Para kp = 1 e taxa de amostragem T = 1:
K
K
z (z - 1) d z (z - 1) d (1 K )z - K
d
d
T
1
PD(z)
z
z
z
G(z)PD(z)
z K (z - 1)
( z 0.2)
d
2
z
(10z 10 z 5)
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
1 G(z)PD(z) 1
( z 0.2)(z K (z - 1))
d
0
2
z(10z 10z 5)
z(10z 2 10z 5) ( z 0.2)(z K (z - 1)
d
0
2
z(10z 10z 5)
z(10z 2 10z 5) ( z 0.2)(z K d (z - 1) 0
z(10z 2 10z 5 z 0.2) K d (z - 1)( z 0.2) 0
1
K (z - 1)( z 0.2)
d
0
z(10z 2 9z 4.8)
G
(z)
cequivalente
K (z - 1)( z 0.2)
d
z(10z 2 9z 4.8)
Lugar das raízes do sistema equivalente:
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Root Locus
1
0.8
0.6
0.4
Imaginary Axis
0.2
0
-0.2
System: funcz
Gain: 5.05
Pole: 0.414 - 0.248i
Damping: 0.804
Overshoot (%): 1.43
Frequency (rad/sec): 0.906
-0.4
-0.6
-0.8
-1
-1
-0.5
0
0.5
1
1.5
Real Axis
b) Apresente um Kd (ganho do termo derivativo de um controlador PD) que garanta um sistema final com
sobre-sinal menor que 5%. Defina os limites da área de projeto.(1,0)
Solução:
Definindo os limites de projeto:
Um sobre sinal menor que 5% implica em um ξ>069
Isto permite uma área de projeto:
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Segundo a figura do lugar das raízes do sistema equivalente,
Por aproximação, foi escolhido o ponto -0.4+0.2j . Repare que este ponto esta relativamente afastado da
curva real.
Substituindo-se este ponto na equação característica:
1 G(z)PD(z) z(10z 2 10z 5) ( z 0.2)(z K d (z - 1)) 0
- z(10z 2 9z 4.8)
Kd
4.8 1.7 j
(z - 1)( z 0.2) z 0.4 0.2 j
Desprezando-se a parte imaginária (como erro de aproximação do esboço), tem-se:
Kd = 4.8. Voltando-se na equação característica:
1 G(z)PD(z) z(10z 2 10z 5) ( z 0.2)(z K d (z - 1)) 0
0
Kd 4.8
z(10z 2 10z 5) ( z 0.2)(z 4.8(z - 1)) 0
10z3 - 4 z 2 - 1.2 z + 1 0
F7D440 - CONTROLE E SERVOMECAMISMOS II
Prof. Carlos Raimundo Erig Lima
Cujas raízes:
-0.4276
0.4138 + 0.2503i
0.4138 - 0.2503i, são os valores corretos no plano z.
c) Compare o sobre-sinal do sistema original (K=1) e do sistema compensado. As condições de projeto
foram atendidas? (1,0)
Observe que o sistema original apresenta raízes da equação característica (K=1) em:
1 G(z)PD(z) (10z 2 10z 5) ( z 0.2) 0
0.4500 + 0.5268i
0.4500 - 0.5268i
Em s =ln(0.4500 + 0.5268i)/T = -0.3670 + 0.8639i tem-se ξ = 0.39 (fora dos objetivos).
Já o sistema compensado, considerando que os polos complexos do sistema compensado domínam a
resposta:
Em s =ln(0.41 + 0.25i)/T = -0.7335 + 0.5476i tem-se ξ = 0.8 (dentro dos objetivos).
d) Mostre como o PD afeta o erro em regime do sistema para uma entrada sequencia degrau. (1,0)
Solução:
O PD não afeta o erro em regime, pois o termo (6z-5)/z, quando aplicado o teorema do valor final é igual
a 1.
X(z)
G(z)
Y(z)
X(z)
Sistema Original
Y(z)
PD(z)
G(z)
Sistema Compensado
1
1
BOA PROVA!