6. Dinâmica de Elétrons em
Sólidos
6.1
– O modelo de Drude
Neste Capítulo trataremos da dinâmica de elétrons em sólidos, que consiste no
estudo da resposta eletrônica a campos elétricos e magnéticos externos. Veremos que, em
muitas situações, esta a resposta é bastante diferente do que se poderia esperar de um
elétron isolado, ou seja, o potencial cristalino exerce um papel fundamental, dando
origem a efeitos inusitados. Iremos, portanto, utilizar os diversos conceitos introduzidos
no capítulo anterior, e veremos que será fundamental considerarmos a natureza quântica
dos elétrons. Porém, é conveniente iniciarmos este estudo com um modelo clássico de
condução cristalina. Faremos isto não apenas por razões históricas, mas também para
introduzirmos alguns conceitos básicos e até mesmo para apontar as insuficiências deste
modelo clássico, que tornaram clara a necessidade de uma formulação quântica da
dinâmica eletrônica. Este modelo é conhecido como modelo de Drude.
Em 1900, ou seja, apenas 3 anos depois da descoberta do elétron por J. J.
Thomson, P. Drude formulou um modelo para a dinâmica daquelas então recémdescobertas partículas com o objetivo de explicar, entre outras coisas, a condução de
eletricidade e calor pelos metais. Naquela época, antes do surgimento da Mecânica
Quântica, as ferramentas de Drude eram a Mecânica Newtoniana e a Termodinâmica.
Drude então supôs que os elétrons em um sólido se comportavam como um gás de
partículas clássicas, o que era a melhor suposição possível na ocasião.
Drude supôs ainda que os elétrons se moviam em um cristal sofrendo seguidas
colisões com os íons da rede, como está esquematizado na Fig. 6.1. Como vimos no
Capítulo anterior, isto não é correto: em um potencial cristalino periódico um elétron de
Bloch tem uma velocidade média independente do tempo. Se a hipótese de colisões com
os íons estacionários fosse verdadeira, o livre caminho médio de um elétron no sólido
seria da ordem das distâncias interatômicas, ou seja, apenas alguns angstrons. Como
vimos, a baixas temperaturas o livre caminho médio pode chegar a alguns centímetros!
Hoje sabemos que os mecanismos de espalhamento mais importantes para os
elétrons não são os íons cristalinos estacionários, mas sim os defeitos da rede (como
impurezas, vacâncias, etc.), as vibrações cristalinas (espalhamento elétron-fônon) e o
espalhamento elétron-elétron. No entanto, podemos estudar o modelo de Drude sem nos
preocuparmos com o mecanismo específico de espalhamento. Vamos fazer apenas as
seguintes suposições:
1. A probabilidade que um elétron sofra uma colisão entre os instantes t e t+dt é
dada simplesmente por dt , onde é o tempo de relaxação. As colisões
são portanto eventos não-correlacionados.
2. Entre duas colisões, o elétron viaja em linha reta, como uma partícula livre.
95
3. Após a colisão, o elétron "perde a memória" sobre sua velocidade anterior, e
sua nova velocidade tem direção aleatória e módulo dado pela distribuição
de Maxwell.
Figura 6.1 – Modelo clássico de dinâmica eletrônica proposto por Drude, segundo o qual os elétrons
sofreriam colisões clássicas com os íons.
Iremos agora obter a equação de movimento dos elétrons segundo este modelo.
Suponhamos que no instante t o momento linear médio dos elétrons seja p(t ) . Qual
será então o momento médio no instante t+dt ? Bem, o momento de um elétron pode ser
alterado por uma força externa f (t ) ou por colisões. Como dissemos, um elétron sofre
uma colisão entre t e t+dt com probabilidade dt . Assim, a fração dos elétrons que
colidem neste intervalo é dt , e a fração dos elétrons que não colidem é (1 dt ) .
Assim, a contribuição para p(t dt) dos elétrons que não colidem é:
p(t dt) p(t ) f (t )dt (1 dt ) .
(6.1)
Os elétrons que sofreram colisão no intervalo de tempo considerado também
contribuem para p(t dt) , já que após a colisão eles continuam sendo acelerados pela
força f(t). Podemos dizer que a contribuição destes elétrons é menor que f (t ) dt dt , já
que não sabemos o instante exato da colisão. Este termo contribui apenas em ordem (dt)2
para o momento médio final. Mantendo apenas os termos lineares em dt, temos
p(t dt) p(t ) f (t )dt p(t ) dt ,
(6.2)
que nos permite então encontrar a equação de movimento:
dp
p
f ,
dt
(6.3)
onde, para simplificar a notação, abandonamos os colchetes para as quantidades médias.
Fica implícito, porém, que esta não é uma equação para um elétron específico, mas
96
descreve o movimento médio dos elétrons. Note que ela é uma equação de Newton com
um termo dissipativo, devido às colisões.
Vamos analisar as previsões que esta equação fornece para alguns casos
importantes:
(A) Campo elétrico constante: Lei de Ohm
No caso de um campo elétrico constante, temos f eE . A Equação (6.3) tornase então
dp
p
eE .
dt
(6.4)
Estamos interessados principalmente na solução estacionária, ou seja, quando dp dt 0 .
Impondo esta condição, obtemos
v
e E
,
m
(6.5)
onde v p m é a velocidade média dos elétrons, conhecida como velocidade de
arraste. A velocidade de arraste está relacionada à densidade de corrente j nev , onde
n é a densidade de elétrons. Assim, obtemos
ne2
j
E DE ,
m
(6.6)
ne 2
é a condutividade de Drude. A Equação (6.6) é a conhecida lei de
m
Ohm da condução elétrica, uma lei empírica que acabamos de demonstrar a partir de
argumentos sobre o movimento microscópico dos elétrons. A expressão para a
condutividade de Drude contém o tempo de relaxação como único parâmetro
desconhecido, já que a massa eletrônica e a densidade de elétrons no metal são, em
princípio, conhecidas. Ela nos permite, portanto, a partir de medidas experimentais da
condutividade, obter o tempo de relaxação, um importante parâmetro associado ao
movimento microscópico eletrônico. A Tabela 6.1 mostra resultados para para diversos
metais alcalinos a diferentes temperaturas. Note que é da ordem de 10-14 s e diminui
fortemente com o aumento da temperatura. Assim, a resistividade dos metais aumenta
com a temperatura, o que é verificado experimentalmente e é uma das características que
os distingue dos semicondutores, como veremos futuramente.
onde D
97
Metal
Li
Na
K
T = 77 K
7,3 10-14 s
17 10-14 s
18 10-14 s
T = 273 K
0,88 10-14 s
3,2 10-14 s
4,1 10-14 s
Tabela 6.1 – Tempo de relaxação em alguns metais alcalinos em função da temperatura.
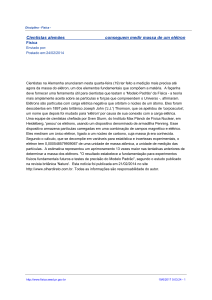
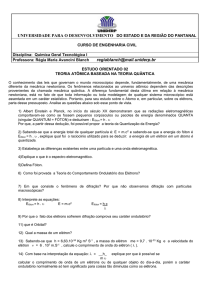
Figura 6.2 – Medidas experimentais da resistividade do potássio a baixas temperaturas. Note o
comportamento quadrático, convergindo para uma constante (resistividade devido a impurezas) a T = 0.
Os dados se referem a duas amostras com diferentes graus de pureza. (Fonte: Kittel)
Podemos entender de forma mais completa as razões do aumento da resistividade
com a temperatura analisando os diversos tipos de espalhamento que um elétron pode
sofrer. Como já dissemos, um elétron pode ser espalhado por impurezas. A concentração
de impurezas é independente da temperatura, portanto espera-se que a resistividade
associada a este processo de espalhamento também seja razoavelmente independente da
temperatura, ou seja, i constante . Um outro mecanismo de espalhamento é através de
vibrações cristalinas. Estudaremos este mecanismo em mais detalhe no próximo capítulo,
mas podemos adiantar que a resistividade associada a este mecanismo é linear com T a
temperaturas altas ( v T ) e proporcional a T5 a temperaturas baixas. O terceiro
mecanismo é o espalhamento elétron-elétron. Como vimos brevemente no Capítulo
anterior, a seção de choque do espalhamento elétron-elétron é proporcional a T2 a baixas
temperaturas, e portanto a resistividade associada a este mecanismo tem a mesma
dependência. Assim, a resistividade dos metais a baixas temperaturas é dominada por este
termo quadrático:
(6.7)
98
(T ) i AT 2 ,
esta expressão é conhecida como Regra de Matthiessen. A temperaturas altas o
mecanismo de espalhamento elétron-elétron deixa de ser quadrático, e a resistividade é
dominada pelo espalhamento elétron-fônon, linear com a temperatura. A verificação
experimental da Regra de Matthiessen está mostrada na Fig. 6.2.
(B) Campo elétrico e magnético constantes: Efeito Hall
Na presença de campos elétricos e magnéticos, a força que atua sobre um elétron
é a força de Lorentz:
f eE v B .
(6.8)
A equação de movimento no regime estacionário torna-se, portanto,
pB p
e E
0.
m
(6.9)
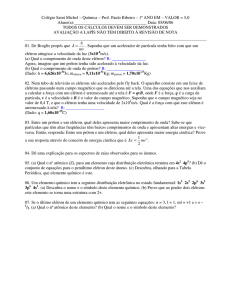
Uma geometria particular, porém de grande interesse prático, ocorre quando os
campos elétrico e magnético aplicados são perpendiculares um ao outro. Esta geometria
dá origem ao chamado Efeito Hall, descoberto por E. H. Hall em 1879 (ou seja, antes da
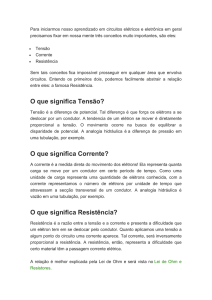
descoberta do elétron). Considere um campo elétrico na direção x e um campo magnético
na direção z, como mostra a Fig. 6.3. No regime transiente, um elétron inicialmente
acelerado pelo campo elétrico longitudinal Ex é defletido na direção transversal –y pela
força de Lorentz. Como a amostra é finita nesta direção, isto gera um acúmulo de carga
negativa de um lado e positiva do outro, que produz um campo elétrico transversal na
direção y que, no regime estacionário, cancela a componente transversal da força de
Lorentz.
z
B = Bz
y
+ + + + + + + + + +
x
v
-
-
-
-
-
j
-
-
-
-
-
Eyy
Exx
Figura 6.3 – Esquema do Efeito Hall. B e Ex são os campo aplicados, enquanto que o campo transversal
Ey surge devido ao acúmulo de elétrons na parte anterior da amostra mostrada na figura.
99
Como veremos a seguir, as quantidades de interesse são a magnetoresistividade
Ey
E
longitudinal , ( B ) x e o coeficiente Hall, R H
. Vamos calcular estas duas
jx
jx B
quantidades resolvendo as equações de movimento do modelo de Drude. Se B = Bz,
eB
então p B p y x p x y B . Usando a definição de frequência de cíclotron, c
,
m
as componentes x e y da equação de movimento tornam-se
eE x c p y
px
eE y c p x
py
0
(6.10)
0
ne
Multiplicando ambas equações por
e usando as definições de D e j, temos
m
D E x c j y j x 0
D E y c j x j y 0
.
(6.11)
No regime estacionário, j y 0 . Assim, da 1a equação temos
( B)
Ex
1
,
jx D
(6.12)
ou seja, no modelo de Drude a magnetoresistência é independente do campo magnético.
Este resultado foi inicialmente um sucesso do modelo de Drude, já que confirmou os
resultados iniciais de Hall de que B era de fato independente de B. No entanto,
medidas subsequentes em diferentes materiais e faixas de campo magnético mais
extensas mostraram que, em alguns casos, B pode ter uma dependência forte com B,
o que não pode ser explicado por um modelo clássico como o de Drude.
Da 2a equação, obtemos o coeficiente Hall
RH
Ey
jx B
1
.
ne
(6.13)
Este resultado é extremamente interessante e útil. Note que RH não depende do tempo de
relaxação. Medidas de RH medem diretamente a densidade de elétrons e, o que é mais
interessante, o sinal da carga dos mesmos. Veja alguns resultados na Tabela 6.2.
100
Metal
Li
Na
K
Al
Mg
RH (exp)/(-1/ne)
0,8
1,2
1,1
-0,3
-0,2
Tabela 6.2 – Resultados experimentais para o coeficiente Hall de alguns metais.
Note que o valor de Drude está em bom acordo com os resultados experimentais
para os metais alcalinos. Mas, para outros metais, o modelo falha completamente, até
mesmo no sinal da carga dos portadores. Aparentemente, os portadores de eletricidade
nestes materiais são positivos! Entenderemos melhor este aparente mistério nas próximas
seções. Medidas experimentais mostram também uma forte dependência de RH com B, o
que o modelo de Drude também não prevê.
(C) Condutividade AC de metais
Consideremos agora o caso de um metal sob a ação de um campo elétrico
dependente do tempo de forma harmônica:
E(t ) Re E e it .
(6.14)
Esta é a situação relevante, por exemplo, no caso de uma onda eletromagnética
propagando-se por um metal. Procuramos uma solução estacionária da Eq. (6.4), de modo
que
p(t ) Re p e it .
(6.15)
Substituindo em (6.4), obtemos
ip
p
eE
eE
p
1 i
.
(6.16)
Sabendo que j nep m e j(t ) Rej e it , obtemos a relação entre j e E:
j
ne
m E
E ,
1 i
2
onde é a condutividade AC:
101
(6.17)
D
,
1 i
(6.18)
e D é a condutividade DC de Drude (Eq. (6.6)).
Para fazer uma conexão deste resultado com as propriedades óticas de um metal,
temos que relembrar nossos conhecimentos sobre as equações de Maxwell em um meio
material. Em unidades SI,
E
E
B 0 j 0
0 E 0
.
t
t
(6.19)
Sabendo que E t iE , então
E
i
E
,
B 0 0
0
t
t
(6.20)
onde podemos identificar a função dielétrica complexa dependente da frequência:
0
i
.
(6.21)
Esta é uma equação muito importante, que relaciona a função dielétrica com a
condutividade. A partir da Eq. (6.18) e supondo que 1 1, chegamos ao resultado:
P2
0 1 2
,
(6.22)
onde
12
ne 2
P
0m
(6.23)
é a chamada frequência de plasma.
Vamos analisar fisicamente as consequências da Eq. (6.22). Se a função dielétrica
for real e negativa, a radiação eletromagnética não se propaga no metal. De fato, este é o
resultado que entendemos como usual para metais e ocorre para P . No entanto, se
P , a função dielétrica é positiva e a radiação se propaga pelo metal sem ser
atenuada. De fato, observa-se que os metais alcalinos tornam-se transparentes para
frequências em torno do ultravioleta ou maiores. A Tabela 6.3 mostra a comparação entre
a predição teórica (a partir da Eq. (6.23)) e o valor medido do comprimento de onda de
1
A validade desta aproximação de altas frequências está discutida em Ashcroft (p. 18).
102
plasma P 2c P para vários metais alcalinos. O acordo é razoável, considerando as
aproximações envolvidas.
Metal
Li
Na
K
Rb
Cs
λP teórico
(102 nm)
1,5
2,0
2,8
3,1
3,5
λP experimental
(102 nm)
2,0
2,1
3,1
3,6
4,4
Tabela 6.3 – Comprimento de onda de plasma (experimental e teórico) para os metais alcalinos. Fonte:
Ashcroft, p. 18.
A propagação de ondas eletromagnéticas em um metal está associada também a
oscilações de carga, como pode ser concluído a partir da existência de uma densidade de
corrente oscilatória j(ω) no material. Uma maneira qualitativa de entender essas
oscilações de carga que o metal pode sustentar (também conhecidas como oscilações de
plasma ou plásmons) é através do modelo simplificado que está ilustrado na Fig. 6.4.
Considere um gás de elétrons com densidade n que se desloca como um todo por uma
distância x em relação aos núcleos positivos. Este deslocamento irá produzir densidades
densidade superficiais de carga σ (não confundir com a condutividade) em faces opostas
do sólido, como mostra a figura, com nex . Forma-se então, instantaneamente, a
configuração de um capacitor de placas paralelas, com um campo elétrico homogêneo e
igual a 0 . Este campo causará uma força restauradora no gás de elétrons como um
todo. De fato, cada elétron estará sujeito a uma força restauradora F ne2 x 0 , que
dará origem uma oscilação harmônica com frequência angular ne 2 m 0 , que é
precisamente a frequência de plasma.
12
x
-
+
+
+
+
Figura 6.4 – Modelo simplificado para as oscilações de plasma. A região cinza representa o gás de elétrons.
103
(D) Condutividade Térmica: Lei de Wiedemann-Franz
Um dos maiores sucessos do modelo de Drude foi a explicação da Lei de
Wiedemann-Franz. Há muito tempo sabia-se que os metais eram bons condutores de
eletricidade e de calor. Suspeitava-se portanto de um mesmo mecanismo microscópico
para os dois fenômenos. Drude supôs que este mecanismo seria o movimento dos elétrons
nos metais.
A Lei de Wiedemann-Franz é uma lei empírica descoberta a partir de medidas da
condutividade térmica e elétrica de diversos metais:
AT ,
(6.24)
onde é a condutividade térmica, é a condutividade elétrica, T é a temperatura e A é
uma constante. O que torna essa lei ainda mais interessante é o fato de que a constante A
parecia ser razoavelmente independente do metal, variando entre 2,0-2,5 10-8 WK-2
para os mais diversos materiais2.
Podemos obter a Lei de Wiedemann-Franz a partir dos argumentos de Drude
sobre o movimento dos elétrons. Apresentaremos aqui uma demonstração simplificada,
usando um modelo unidimensional. A condutividade térmica é definida por
jQ T ,
(6.25)
onde jQ é a densidade de corrente de energia térmica e T é o gradiente da temperatura,
Vamos supor uma barra metálica bastante fina, ao longo da direção x, com a temperatura
diminuindo da esquerda para a direita, como mostra a Fig. 6.5. Os elétrons que chegam
em um dado ponto x da barra vindos da esquerda sofreram sua última colisão, em média,
no ponto x v , enquanto que os elétrons que chegam pela direita sofreram sua última
colisão, em média, no ponto x v . Como se nota, os elétrons vindos da esquerda têm
maior energia cinética, pois a temperatura é maior daquele lado. Haverá portanto um
fluxo de energia da esquerda para a direita. A densidade de corrente de energia térmica
transportada pelos elétrons que vêm da esquerda é n 2 v T x v , onde n/2 é a
densidade de elétrons que viajam para da esquerda para a direita e (T) é a energia
térmica por elétron correspondente à temperatura no ponto de onde os elétrons vieram.
Analogamente, a densidade de corrente de energia térmica transportada pelos elétrons
oriundos da direita é n 2 v T x v . O fluxo total é, portanto,
j Q 12 nv T x v T x v
nv 2
2
d dT
dT dx
Veja a Tabela 1.6 do Ashcroft.
104
(6.26)
T alta
T baixa
x - v
x + v
x
Figura 6.5 – Transporte de energia em uma barra metálica com um gradiente de temperatura.
Para obtermos uma expressão análoga para o caso tridimensional, basta notarmos
que, na expressão acima, a velocidade corresponde à média da componente x. Usando
que v x2 13 v 2 , e sabendo que nd dT N V d dT dE dT V c v , onde cv
é o calor específico eletrônico, temos
j Q 13 v 2 c v T ,
(6.27)
ou seja, a condutividade térmica é dada por 13 v 2 cv . Para obtermos o a lei de
Wiedemann-Franz, basta dividirmos pela condutividade elétrica de Drude (Eq. 6.6):
2
13 c v mv
ne 2
(6.28)
Aplicando, como Drude fez, as leis da termodinâmica clássica, c v 32 nk B e
1
2
mv 2 32 k B T , obtemos
3 kB
T.
2 e
2
(6.29)
Segundo o modelo de Drude, portanto, há uma constante de proporcionalidade A
universal, como sugeriam os resultados experimentais. O valor numérico desta constante
é de 1,1 10-8 WK-2, aproximadamente metade do valor experimental. Porém, na época
Drude errou por um fator 2 o cálculo de sua condutividade (veja problema da lista),
encontrando exatamente o valor experimental, o que soou como um sucesso estrondoso
da teoria. Na verdade, além deste erro de cálculo, há outras duas discrepâncias por um
fator de 100 que fortuitamente se cancelam: como vimos no capítulo passado, o calor
específico à temperatura ambiente é tipicamente 100 vezes menor que o resultado
clássico, enquanto que as velocidades quadráticas médias são da ordem de 100 vezes
maiores, devido ao Princípio de Exclusão de Pauli.
105
6.2
- Teoria Semi-Clássica
Como vimos, o modelo de Drude, apesar de servir como uma introdução
qualitativa à dinâmica eletrônica em sólidos, contém diversas limitações fundamentais
por ser um modelo clássico. Nesta Seção, iremos descrever uma teoria muito mais
elaborada da dinâmica eletrônica, a teoria semi-clássica.
Na descrição semi-clássica a interação elétron-cristal é tratada quanticamente
através da estrutura de bandas (supostamente conhecida) n (k ) , que é obtida, como
vimos no Capítulo anterior, a partir da solução da equação de Schrödinger com um
potencial periódico. Já a interação dos elétrons com os campos elétrico e magnético será
descrita classicamente, daí o nome de teoria semi-clássica.
Os estados estacionários em um potencial periódico podem ser descritos pelas
funções de Bloch k (r ) . Funções de Bloch têm o vetor de onda k bem definido, e
portanto são deslocalizadas espacialmente, ou seja, a probabilidade de se encontrar um
elétron em qualquer célula unitária do cristal é a mesma. Esta descrição satisfaz o
princípio da incerteza, xk 1 pois a incerteza no vetor de onda é nula, enquanto que a
incerteza na posição é total.
Para descrevermos uma dinâmica semi-clássica, precisaremos determinar
simultaneamente a posição e o momento de um elétron sem violar o princípio da
incerteza. Isto só é possível porque não precisamos de precisão absoluta nesta
determinação. A posição r do elétron deve ser bem definida se comparada com o
comprimento de onda dos campos externos aplicados, enquanto que o vetor de onda k
deve ser bem definido se comparado às dimensões da Zona de Brillouin.
Este objetivo é alcançado através de um pacote de ondas de Bloch, construído de
forma análoga a um pacote de ondas planas usual em Mecânica Quântica:
i
n (r, k , t ) g (k ) nk (r ) exp n (k )t .
k
(6.30)
O vetor de onda k do pacote será bem definido se os coeficientes g(k') forem diferentes
de zero apenas em uma pequena vizinhança k em torno de k muito menor que as
dimensões da Zona de Brillouin, ou seja, k 1 a , como mostra Fig. 6.6.
ky
Região onde
g(k') 0
k
kx
Figura 6.6 - Apenas os coeficientes de Fourier de ondas de Bloch na região cinza contribuem para o
pacote de ondas, definindo k em relação às dimensões da ZB.
106
A partir da relação de incerteza xk 1 , isto implica em que x a , ou seja, a
largura do pacote no espaço real é muito maior que as distâncias interatômicas. Como
condição de validade da aproximação semi-clássica, esta largura deve ainda ser muito
menor que o comprimento de onda dos campos externos para que possamos supor que o
campo que atua em um elétron é bem definido. Estas condições estão esquematizadas na
Fig. 6.7.
x
a
Figura 6.7 - Ilustração das condições de validade do modelo semi-clássico no espaço real: a<<x<<.
As condições de validade descritas acima têm uma faixa de aplicação bastante
ampla. A luz visível, por exemplo, tem comprimentos de onda na faixa de 104 Å, muito
maiores portanto que as distâncias interatômicas típicas.
Assim, de agora em diante, quando falarmos de um "elétron" estaremos nos
referindo ao pacote de ondas de Bloch definido acima, com posição r, vetor de onda k e
energia n (k ) bem definidos. A velocidade do elétron é também bem definida, e dada
pela velocidade de grupo do pacote de ondas:
v n (k )
d 1
k n (k ) .
dk
(6.31)
Reobtemos o resultado para a velocidade de um elétron de Bloch (Equação (5.44)), agora
dentro de um contexto diferente.
A dinâmica eletrônica no modelo semi-clássico é regida por um conjunto de
regras, definidas a seguir:
1. O índice de banda n é uma constante do movimento. Transições banda-banda
causadas pelos campos (absorção ou emissão de fótons) são efeitos quânticos
que o modelo semi-clássico não se propõe a descrever.
2. O vetor de onda k é definido na 1a Zona de Brillouin, ou seja, elétrons com
vetor de onda k e k+G são o mesmo elétron. Consequentemente, se a
dinâmica alterar o valor de k para fora da 1a ZB, automaticamente subtrai-se
um vetor G para que tenhamos de volta k na 1a ZB.
3. As equações semi-clássicas de movimento são:
107
1
n (k )
eE v n (k ) B
r v n (k )
(6.32)
k Fext
(6.33)
A Equação (6.33) merece uma justificativa. Mostramos no Capítulo anterior que
k não é o momento do elétron, mas sim o momento cristalino. Pode então parecer
estranho que k Fext , onde Fext é a força externa, no nosso caso a força de Lorentz.
Mas não há nenhuma inconsistência nisso, já que a força externa não é a força total no
elétron. As forças devido ao potencial cristalino já estão, de alguma forma, incluídas na
relação de dispersão n (k ) .
Vamos analisar em detalhe algumas das consequências das equações semiclássicas:
(A) Bandas totalmente preenchidas não contribuem para condução
Vamos analisar a dinâmica semi-clássica dos elétrons sob a ação de um campo
elétrico constante em uma banda totalmente preenchida, como a da Fig. 6.8. A força
externa é simplesmente Fext eE . Podemos então resolver a Equação (6.33), obtendo
k (t ) k (0)
eE
t .
(6.34)
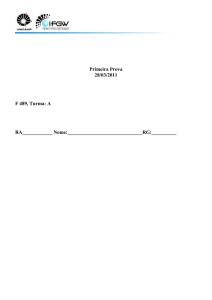
Note que, após um pequeno intervalo dt, os vetores de onda de todos os elétrons mudam
pela mesma quantidade. Uma banda que está inicialmente preenchida continua
exatamente da mesma maneira, com a única diferença que há uma permutação entre os
vetores de onda dos elétrons, como mostra a Fig. 6.8.
E
1
10
1
9
2
2
3
4
7
4
5
10
9
3
8
8
5
6
6
7
k
k
t=0
t = dt
Figura 6.8 - Ilustração da dinâmica eletrônica a campo elétrico constante em uma banda totalmente
preenchida. Todos os elétrons têm seu vetor de onda k alterado pelo mesmo valor, ocorrendo apenas uma
permutação dos elétrons (indicados pelos números) pelos diferentes k's permitidos.
108
Vamos mostrar agora que a densidade de corrente elétrica associada a uma banda
totalmente preenchida é nula. A densidade de corrente é dada por j ne v . A
velocidade média deve ser encontrada somando-se sobre todos os pontos k da 1a ZB:
j ne
2
N
2e
v(k ) (2 )
3
k
ZB
dk k (k ) .
(6.35)
Usamos agora os seguintes fatos: (i) A função (k ) é periódica no espaço recíproco, com
período igual à 1a ZB: (k ) (k G) ; (ii) (Teorema) A integral sobre uma célula
unitária do gradiente de qualquer função periódica é zero. Este teorema está demonstrado
no Apêndice I do Ashcroft. Assim, mostramos que j 0 para uma banda completamente
preenchida. Este resultado justifica a definição de condutores e isolantes que fizemos na
Seção 5.3, ou seja, materiais isolantes têm todas as bandas totalmente preenchidas ou
vazias, enquanto que materiais condutores ou metálicos têm pelo menos uma banda semipreenchida, e só participam da condução de eletricidade os elétrons destas bandas.
(B) Buracos
Um dos resultados mais intrigantes apresentados na Seção anterior foi a medida
do coeficiente Hall em alguns metais que aparentemente indicava que os portadores de
carga seriam positivos. Veremos que a razão deste fenômeno está no comportamento
coletivo dos elétrons em uma banda semi-preenchida que é muitas vezes melhor
compreendido se interpretarmos a ausência de elétrons em alguns níveis como
"partículas" de carga positiva, conhecidas como buracos. Vejamos algumas propriedades
do buracos:
(i) Uma banda totalmente preenchida tem momento total igual a zero, ou seja,
k total k 0 . Isto ocorre porque para cada vetor de onda k permitido existe um -k. Se
k
retiramos um elétron com vetor de onda ke da banda, esta terá momento total -ke, ou
podemos equivalentemente dizer que criou-se um buraco com momento k b k e , como
mostra a Fig. 6.9. O buraco é a uma representação efetiva dos demais elétrons que
restaram na banda.
(ii) A energia do buraco é o negativo da energia do elétron ausente,
b (k b ) e (k e ) . Isto ocorre pois quanto mais baixa a energia do nível desocupado,
maior será a energia total dos elétrons que restaram, ou seja, do buraco. Pode-se então
definir uma banda virtual de buracos, com concavidade oposta à banda de elétrons, como
mostra a Fig. 6.9.
ke
kb
k
Figura 6.9 - Duas descrições equivalentes do mesmo sistema físico: uma banda de elétrons com um
único nível vazio, de energia e e vetor de onda ke, ou uma banda de buracos com um único nível
ocupado, de energia b=-e e vetor de onda kb=- ke.
109
(iii) A velocidade do buraco é igual à velocidade que teria o elétron ausente,
v b v e . Isto pode ser verificado notando-se que as derivadas de (k ) na Fig. 6.9 são
idênticas tanto para o elétron como para o buraco.
(iv) Se k b k e e v b v e , então a equação de movimento para buracos é :
k b eE v b B ,
(6.36)
ou seja, é a equação de movimento para uma partícula de carga positiva +e!
Estas 4 características definem o conceito de buraco. Mas, como dissemos, a
descrição da dinâmica dos elétrons em uma banda pode ser feita ou não utilizando-se este
conceito. Veremos a seguir em que situações a utilização da idéia de buracos será mais
útil.
(C) Massa efetiva
Em alguns casos de interesse, principalmente em semicondutores, o
preenchimento das bandas é tal que uma das situações esquematizadas na Fig. 6.10 pode
ocorrer: o nível de Fermi está localizado próximo do fundo ou do topo de uma banda. Na
vizinhança de um máximo ou mínimo, a relação de dispersão pode sempre ser
aproximada por uma expressão quadrática. Em uma dimensão, teríamos:
(k ) 0 Ak k 0 2 ,
(6.37)
onde o sinal (+) descreve a banda em torno de um mínimo e o sinal (-) em torno de um
máximo.
F
F
k0
k0
k
k
Figura 6.10 - Situações importantes onde o conceito de massa efetiva é útil: banda ocupada apenas em
torno de um mínimo (esquerda) ou desocupada em torno de um máximo (direita).
Por analogia com os elétrons livres, onde (k ) 2 k 2 2m , define-se uma massa
efetiva m tal que A 2 2m . Assim,
(k ) 0
2
k k 0 2 .
2m
110
(6.38)
A velocidade e a aceleração podem então ser calculadas analiticamente:
1 d
(k k 0 )
dk
m
F
k
a v ext
m
m
v(k )
(6.39)
(6.40)
Vejamos estas relações em maior detalhe. Na vizinhança de um mínimo, temos
Fext m a , ou seja, o elétron se comporta como uma partícula livre com uma massa
efetiva. A massa efetiva pode ser numericamente bastante diferente da massa do elétron
(como veremos quando estudarmos os materiais semicondutores), o que irá alterar
profundamente as propriedades dinâmicas dos elétrons, tornando-os mais “leves” ou mais
“pesados”. Note que todo o efeito do potencial cristalino está embutido neste único
parâmetro. Na vizinhança de um máximo, a situação torna-se ainda mais interessante e
inesperada: Fext m a , ou seja, a aceleração é em sentido oposto à força externa, como
se o elétron tivesse uma massa efetiva negativa! Neste caso é útil o conceito de buracos 3.
Para a banda de buracos associada (veja Fig. 6.9) temos uma massa efetiva positiva e,
como mostra a Eq. (6.36), uma equação de movimento para partículas de carga positiva.
Assim, em situações como a mostrada na Fig. 6.10 (direita), em que o nível de Fermi
passa perto do topo de uma banda, diz-se que os portadores de carga são buracos e não
elétrons.
Em geral, a massa efetiva depende da direção cristalina. A generalização de (6.37)
para três dimensões é
2
n (k ) 0 k M 1 k ,
(6.41)
2
onde M-1 é o tensor massa efetiva inversa:
1 2
(6.42)
.
M 1 ij 2
k i k j
Portanto, no caso mais geral, a aceleração não estará necessariamente na direção da força
externa. Mais uma vez, isto pode ser entendido lembrando que a força externa não é a
força total. A influência do potencial cristalino é importante, e está elegantemente
embutida no tensor massa efetiva.
(D) Dinâmica semi-clássica para campo elétrico constante
Vamos agora resolver as equações semiclássicas (6.32) e (6.33) para alguns casos
simples, porém interessantes. Vejamos inicialmente o que ocorre para um campo elétrico
constante. Vamos supor que temos uma banda (como a que está mostrada na Fig. 6.11)
ocupada por um único elétron. Como já vimos, a trajetória dos elétrons no espaço
recíproco é dada pela Equação (6.34), ou seja, em um mesmo intervalo de tempo este
elétron mudaria seu vetor de onda k pela mesma quantidade. Dado um intervalo de tempo
bastante longo, o elétron percorreria no espaço recíproco toda a extensão da 1a Zona de
3
Os físicos não se sentem muito confortáveis em lidar com partículas de massa negativa...
111
Brillouin, até ser “refletido” de volta ao início pela regra k k G (segunda regra do
modelo semi-clássico). Como seria a trajetória deste elétron no espaço real? Bem, a
velocidade é dada pela Equação (6.32). Mostramos na Fig. 6.11 um exemplo
unidimensional, onde a velocidade é simplesmente proporcional a d dk . Como
k (t ) k (0) eEt , o eixo k pode ser simplesmente interpretado como o eixo –t, ou seja,
o movimento do elétron é oscilatório. Chegamos assim a um resultado inesperado: em um
cristal, um campo elétrico DC gera uma corrente AC! Estes movimentos oscilatórios são
conhecidos como oscilações de Bloch, e sua origem está no fato que, na vizinhança dos
pontos de máximo das bandas, a aceleração é contrária à força, como discutimos
anteriormente.
v(k)
(k)
t
k
Figura 6.11 – Exemplo unidimensional das oscilações de Bragg de um elétron sob a ação de um campo
elétrico constante.
O fenômeno das oscilações de Bloch parece destoar da nossa experiência diária.
Sabemos que, quando se aplica um campo elétrico constante a um metal, observa-se uma
corrente elétrica DC (Lei de Ohm). De fato, as oscilações de Bloch ainda não foram
observadas em metais comuns. Mostramos a seguir que a razão está no espalhamento dos
elétrons, que discutimos na Seção anterior.
Para que as oscilações sejam observadas, é necessário que o elétron percorra uma
“distância” k no espaço recíproco da ordem das dimensões da ZB, ou seja,
k 2 a 1010 m -1 . Podemos então calcular o período deste movimento oscilatório:
T k eE . Para campos elétricos típicos (E ~ 1 V/m), temos T ~ 10-5 s. Este deve ser o
tempo de percurso livre de um elétron para que pudéssemos observar uma oscilação de
Bloch. No entanto, vimos na Seção anterior que o tempo de relaxação (tempo médio entre
duas colisões) dos elétrons em metais é da ordem de 10-14 s, ou seja, o elétron colide bem
antes de realizar um ciclo completo pela ZB.
Apesar destas dificuldades em metais, o fenômeno das oscilações de Bloch já foi
observado em sistemas semicondutores artificiais, conhecidos como super-redes4. Uma
super-rede do tipo mais simples é produzida pela deposição sequencial de 2 materiais
diferentes, digamos A e B, com cada camada contendo vários planos atômicos, como
4
K. Leo, P. H. Bolivar, F. Bruggemann, R. Schwelder e K. Kohler, Solid State Comm. 84, 943 (1992).
112
mostra a Fig. 6.12. Assim, a periodicidade no espaço real é modificada artificialmente: a
célula unitária torna-se muito maior. Isto implica que, no espaço k, a ZB torna-se muito
menor. Com um k muito pequeno, torna-se possível observar as oscilações de Bloch.
…
A
B
A
B
…
a
Figura 6.12 – Exemplo de uma super-rede AB. Cada camada consiste em diversos planos atômicos.
Assim, a célula unitária (indicada pelo parâmetro de rede a) torna-se muito maior do que a célula unitária
de um cristal típico, tornando então a ZB muito menor.
(E) Dinâmica semi-clássica para campo magnético constante
No caso de um campo magnético constante, a equação (6.33) torna-se:
k Fext e [ v(k ) B] .
(6.43)
Nota-se então que k é perpendicular tanto a B quanto a (k ) (que é proporcional a
v(k)). Portanto, no espaço recíproco o elétron se move em uma superfície de energia
constante e em um plano perpendicular ao campo magnético, como mostra a Fig. 6.13.
kz
B = Bz
k(0)
ky
= constante
kx
Figura 6.13 – Órbita de um elétron no espaço recíproco sob a ação de um campo magnético constante. O
vetor de onda do elétron se move em uma linha formada pela interseção da superfície de energia
constante com um plano perpendicular ao campo magnético.
Vamos analisar como seria então o movimento deste elétron no espaço real. Seja
o campo magnético orientado na direção z, B Bz . A Equação (6.43) torna-se
113
k x e v y B
k y e v x B
,
(6.44)
que podemos integrar e obter
k y (t )
eB
y (t ) y 0
k x (t )
eB
x(t ) x 0
(6.45)
Esta é portanto a trajetória do elétron no espaço real que, dependendo da complexidade
da superfície de energia constante, pode ser bem complicada. Vamos tomar, como um
exemplo simples, a trajetória elíptica mostrada na Fig. 6.13. Vamos supor que a elipse
correspondente à trajetória no espaço k tenha seu semi-eixo maior ao longo de x. A Fig.
6.14(a) mostra uma projeção desta trajetória no plano kz = 0. Estão mostrados alguns
instantes da trajetória e seus vetores k correspondentes. Analisando as equações (6.44),
obtemos as componentes x e y da velocidade no espaço real (Fig. 6.14(b))
correspondentes aos mesmos instantes da figura (a). Nota-se que a trajetória no espaço
real é também no sentido anti-horário (como se esperaria de um elétron sob a ação de um
campo magnético), porém girada de 90o com relação à trajetória no espaço recíproco. Se
levarmos em conta a componente vz da velocidade, que neste caso é constante, chegamos
à conclusão que a trajetória do elétron é uma espiral.
(a)
1
3
y
(b)
ky 2
3
kx
2
4
x
4
1
Figura 6.14 – Projeção no plano xy das órbitas no espaço recíproco (a) e no espaço real (b) de um elétron
sob a ação de um campo magnético constante na direção z. Ambas as órbitas correspondem a um
movimento no sentido anti-horário, mas estão giradas de 90o entre si.
O exemplo específico discutido acima pertence a uma classe de órbita conhecida
como órbita de elétron. No entanto, este não é o único tipo de órbita. Os tipos de órbita
possíveis estão descritos a seguir.
114
(i) Órbita de elétron
Se a superfície de Fermi não cruza os planos de Bragg que delimitam a 1a ZB (por
exemplo, metais alcalinos), as órbitas dos elétrons mais energéticos têm sentido antihorário, como mostra a Fig. 6.15.
B
1a ZB
Figura 6.14 – Órbita de elétron, no sentido anti-horário.
(ii) Órbita de buraco
Consideremos agora uma situação onde a superfície de Fermi toca a borda da ZB.
Isto ocorre, por exemplo, para os metais bivalentes. A Fig. 6.16(a) mostra esta situação
no esquema de zona reduzida. Repare que a trajetória no elétron no espaço recíproco é tal
que o elétron percorre uma certa distância ao longo da superfície de Fermi até sair da 1a
ZB, quando então é trazido de volta por uma translação de um vetor G. A trajetória
obedece à seqüência 1 2 3 4 1 mostrada na figura. É instrutivo analisar esta
trajetória no esquema de zona repetida, na Fig. 6.16(b). Note que o elétron percorre uma
órbita no sentido horário, como se fosse uma partícula de carga positiva! Mais uma vez
notamos que o conceito de buraco aparece de como uma maneira natural para descrever a
dinâmica destas partículas, e isto ocorre pois a superfície de Fermi encontra-se numa
região próxima a um máximo da banda. As regiões desocupadas que a superfície de
Fermi engloba (círculos brancos na figura) são chamadas bolsos de buracos ("hole
pockets") .
(a)
(b)
1
3
2
2
4
B
4
3
4
1
2
3
Figura 6.14 – Órbita de buraco, no sentido horário.
115
1
Pode-se mostrar que, na vizinhança de um mínimo ou máximo de banda, a
frequência do movimento periódico dos elétrons ou buracos é dada pela frequência de
eB
cíclotron c , onde m* é a massa efetiva ciclotrônica. Pode-se mostrar (Problema 2,
m
Capítulo 12 do Ashcroft, que deixamos como um exercício opcional um tanto
desafiador), que a massa efetiva ciclotrônica pode ser obtida a partir do tensor massa
efetiva da seguinte forma:
1
M 2
,
(6.46)
m
M
zz
onde M é o determinante de M e o campo aplicado está na direção z. Um método
bastante poderoso para determinação da superfície de Fermi em metais é baseado nesta
relação: a ressonância ciclotrônica. Neste método, aplica-se um campo magnético e
constante e incide-se simultaneamente radiação de microondas no cristal. A radiação será
mais atenuada quando a frequência da radiação incidente estiver em ressonância com a
frequência de cíclotron. Variando-se a magnitude e a orientação do campo magnético,
pode-se então mapear a superfície de Fermi.
No Capítulo 5, mencionamos também a existência da massa efetiva térmica, que
pode ser obtida a partir de medidas de calor específico. A massa efetiva térmica, mT ,
também se relaciona com o determinante do tensor massa efetiva:
mT M
13
.
(6.47)
(iii) Órbitas abertas
Um terceiro tipo de órbita são as órbitas abertas, esquematizadas na Fig. 6.15. Em
3 dimensões, as órbitas abertas podem ser obtidas variando-se a direção do campo
magnético aplicado, como mostra a Figura 12.8 do Ashcroft.
B
Figura 6.15 – Órbita aberta.
Referências:
- Ashcroft, Capítulos 1 e 12.
- Kittel, Capítulos 8 e 9.
116