setor 1201
12010409
12010409-SP
Aulas 31 e 32
ATRITO
Escorregamento: É o movimento relativo entre as superfícies
de contato.
Atrito (ou força de atrito ou componente tangencial da força de contato): É a componente da força de contato, causada
pela interpenetração das rugosidades das superfícies de contato,
que impede ou dificulta o escorregamento.
→
C
N
(1)
T
mg
(2)
→
N
Mg
AC = 0,3 ⋅ 100 = 30 N
→
A
AE = 0,35 ⋅ 100 = 35 N
a) M = 2 kg. P2 = 20 N, logo
a força de atrito consegue
equilibrar a solicitadora:
γ = 0; A = 20 N
rugosidade
interpenetradas
Condições de Existência:
• Contato entre superfícies rugosas.
• Escorregamento ou tendência.
• Normal (compressão).
A
(1)
caso a
(2)
Mg
b) M = 3,5 kg. P2 = 35 N. 0
sistema está na
iminência de escorregar:
γ = 0; A = AMAX = 35 N
Como marcar:
• direção: tangente (paralela) à superfície de contato.
• sentido: contrário ao escorregamento ou tendência.
Como calcular:
ATRITO ESTÁTICO: AE µe N
AE = µe N na iminência de escorregar.
ATRITO CINÉTICO: AC = µcN
A
(1)
caso b
(2)
Mg
c) M = 10 kg. P2 = 100 N.
A = AC = 30 N, pois o sistema começa a escorregar.
Exercícios
A
(1)
(2)
1. O coeficiente de atrito estático entre o bloco (1), de massa
10kg, e a superfície de apoio vale 0,35 e o cinético 0,30.
Por intermédio de um fio e polia ideais liga-se o bloco (1) a
um bloco (2) de massa M. Supondo g = 10m/s2 e abandonando o sistema a partir do repouso, determinar a aceleração adquirida pelo conjunto e a intensidade da força de atrito trocada entre o bloco (1) e o plano, nos seguintes casos:
a) M = 2 kg
b) M = 3,5 kg
c) M = 10 kg
ALFA-4 850150409
T
A
Mg
P2 – T = m ⋅ |a|
T – AC = m ⋅ |a|
100 – T = 10 ⋅ |a|
T – 30 = 10 ⋅ |a|
70 = 20|a|
|a| = 3,5 m/s2
35
ANGLO VESTIBULARES
2.
Ainda com relação à questão anterior. Suponha que a massa do
corpo 2 possa variar entre os valores 0 e 4,5kg. Esboçar o
gráfico da intensidade da força de atrito, que realmente age no
corpo 1, em função da força solicitadora (peso do corpo 2).
3. Um corpo de massa m desliza sobre um plano horizontal,
passando por um ponto A com velocidade 20m/s. Sabendose que o coeficiente de atrito cinético entre o corpo e o apoio
é 0,4, determinar:
a) a aceleração do corpo;
b) a distância que o corpo percorre até parar.
A(N)
30
N
P
10
0
10
20
30
40
v=0
V0
A
20
∆s
a) R = mγ
Ac = m |a|
F(N)
µcmg = m |a|
|a| = µcg
|a| = 4 m/s2
b) v 2 = v02 + 2 a∆s
0 = (20)2 – 2 ⋅ 4 ∆s
∆s = 50m
ALFA-4 850150409
36
ANGLO VESTIBULARES
4. (FGV-SP/corrigido) Um automóvel de 1720 kg entra em
curva plana horizontal de raio r = 200m, a 180km/h. Sabendo que o coeficiente de atrito entre os pneus do automóvel e a rodovia é igual a µe = 0,3 (coeficiente de atrito
estático) e µc = 0,2 (coeficiente de atrito cinético), está correto afirmar que:
a) Para que um corpo percorra uma trajetória circular com
velocidade escalar constante, a resultante das forças que
agem sobre ele deve ser nula.
b) Para que o carro faça uma curva em uma pista plana horizontal com velocidade escalar constante, a resultante das
forças que agem sobre ele deve ser a componente radial
do atrito.
c) O automóvel está a uma velocidade segura para fazer a
curva.
d) O automóvel irá derrapar radialmente para fora da curva.
a) Errado. A resultante é radial para dentro da curva.
b) Certo. A resultante é radial para dentro da curva.
c) R = m(v 2/r)
µmg = m(v 2/r) ∴ v = µ
rg 24,5 m/s 88 km/h
v (máxima velocidade com que o veículo pode fazer a
curva).
d) Errado. Pelo Princípio da inércia, o veículo escapa da
curva tangencialmente.
ORIENTAÇÃO DE ESTUDO
Livro 1 — Unidade II
Caderno de Exercícios — Unidade II
Tarefa Mínima
AULA 31
•
Leia os itens 1 e 2, cap. 7.
•
Resolva os exercícios 24 e 25, série 11.
AULA 32
•
Leia o item 3, exercícios resolvidos 1 e 2, cap. 7.
•
Resolva os exercícios 2, 4, 5, 6, 10 e 11, série 7.
Tarefa Complementar
AULA 32
•
ALFA-4 850150409
37
Resolva os exercícios 34, 39, 44 e 48, série 11.
ANGLO VESTIBULARES
Aulas 33 a 35
SISTEMA MASSA-MOLA
1) SISTEMA MASSA-MOLA
Período de oscilação
k
k
k
+A
m
m
m
–A
0
0
+A
+A
0
–A
–A
T = 2π
m
k
2) PÊNDULO SIMPLES
T = 2π
–A
0
L
g
+A
i) O período de oscilação de um sistema massa-mola
não depende de g.
/k
1
ii) T1 = 2π m
/k
T2 = 2π m
2 = 2π m/4k1
Exercícios
1. Com relação a um sistema massa-mola são feitas três afirmações que se seguem. Classifique em certo (C) ou errado (E).
i) ( E ) Um sistema massa-mola oscila na Terra com um
período T. Na Lua, em que a aceleração da gravidade é 6 vezes menor que a aceleração na Terra,
o sistema oscilará com período T/3.
ii) ( C ) Um corpo de massa m é preso, sucessivamente, a
duas molas ideais de constantes k1 = 10 N/m e
k2 = 40 N/m. Quando preso na mola 1, o sistema
oscila com período 6 s. Quando preso na mola 2, o
sistema oscilará com período 3 s.
iii) ( E ) Um sistema massa-mola oscila em um plano horizontal com freqüência f0. Se o mesmo sistema for
disposto em um plano inclinado, a freqüência de
oscilação diminuirá.
ALFA-4 850150409
T2 =
1
/k
1 = 1 T1
2π m
2
2
T2 = 3 s
iii) O período de um sistema massa-mola não depende da
direção de oscilação.
38
ANGLO VESTIBULARES
2. As figuras representam uma mola helicoidal em posições
de equilíbrio. Cortando-se o fio que interliga os corpos, o
sistema passa a oscilar em um movimento vertical. Determinar:
(M = 1,0 kg; m = 0,25 kg)
a) A amplitude da oscilação.
b) O período da oscilação.
c) A freqüência da oscilação.
Fig. A
3. a) Determinar o período de um pêndulo cônico em função do
comprimento L, do ângulo entre o fio e a vertical (α) e da
aceleração da gravidade g. Desprezar a resistência do ar.
b) Mostre que, se α é muito pequeno, o período do pêndulo
cônico vale: T ≈ 2π
Fig. B
L
g
h = L . cos α
α
L
1
r = L . sen α
1,0 m
1,1 m
α T
P = mg
M
2
M
R = mω2r
m
a)
Constante elástica da mola:
Fig. A: Mg = kx1
(1)
Fig. B: (m + M)g = kx2 (2)
(2) – (1):
mg = k(x2 – x1)
mg
mω2r
=
L
⋅
cos α
r
g
ω2 = L ⋅ cos α
(0,25 ⋅ 10)
= 25 N/m
mg = k (0,1) ⇒ k =
0,1
2π 2
g
=
L ⋅ cos α
T
a) Cortando-se o fio, a mola oscila em torno da posição
de equilíbrio. Portanto a amplitude do movimento é
0,1 m.
/k
= 2π s ≈ 1,256 s.
b) T = 2π M
5
T = 2π
1,0 m
1,1 m
M
M
M
ALFA-4 850150409
Lcos α
g
b) Se α é muito pequeno, o cos α é aproximadamente 1,
como mostra a tabela abaixo.
Logo, L ⋅ cos α ≈ L
e
L
T ≈ 2π
g
c) f = 1/T ≈ 0,796 Hz.
0,9 m
P
R
=
h
r
39
θ (graus)
cos θ
10
0,984808
9
0,987688
8
0,990268
7
0,992546
6
0,994522
5
0,996195
4
0,997564
3
0,99863
2
0,999391
1
0,999848
ANGLO VESTIBULARES
4. Embora os movimentos de um pêndulo cônico e de um
pêndulo oscilando sejam completamente diferentes, é
possível demonstrar que a expressão
T ≈ 2π
ORIENTAÇÃO DE ESTUDO
Livro 3 — Unidade III
L
g
Caderno de Exercícios — Unidade X
vale tanto para um como para o outro, desde que o ângulo
entre o fio e a vertical seja bem pequeno.
Quando o pêndulo está oscilando e o ângulo entre o fio e
a vertical é bem pequeno, dizemos que se trata de um
pêndulo simples.
Cuidado! No pêndulo cônico o período é o tempo para
completar uma volta; no pêndulo simples, é o tempo para
retornar à posição inicial. Se o corpo é abandonado de
uma posição A, o período é o tempo necessário para
voltar ao ponto A.
O relógio de pêndulo é um contador de oscilações de um pêndulo simples. Suponha que o pêndulo de um relógio tenha
comprimento 1m.
a) Determine o período do pêndulo. (Adotar g = 9,8 m/s2)
b) Se o pêndulo de 1m fosse substituído por outro de 93cm
de comprimento, o relógio atrasaria ou adiantaria? Suponha
que nenhuma outra característica do relógio seja alterada.
a) T ≈ 2π
gL
T ≈ 2 × 3,14 ×
Tarefa Mínima
AULA 33
•
Leia o texto Pêndulos, molas e grandes fortunas, que está após as
tarefas.
• Resolva os exercícios 1, 5 e 6, série 1.
AULA 34
•
Resolva os exercícios 2 e 9, série 1.
AULA 35
•
Resolva os exercícios 17 e 18, série 1.
Tarefa Complementar
AULA 35
•
•
•
1
≈ 2s
9,8
L’g
L’
T’ ≈ 2π g
0,93
≈ 1,93 s
T’ ≈ 2π 9,8
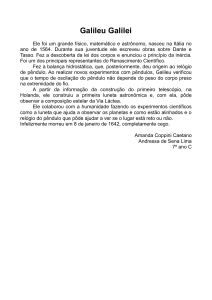
PÊNDULOS, MOLAS E GRANDES FORTUNAS
b) T’ ≈ 2π
RELÓGIOS DE PÊNDULO
Essa história tem início em 1581, quando Galileu, observando
castiçais que oscilavam no interior de uma igreja, fez uma descoberta
surpreendente: os períodos de oscilação de pêndulos de mesmo
comprimento não dependem da amplitude, desde que ela seja pequena.
Retomando mais tarde essa questão, descobriu também que o
período de oscilação depende do comprimento do pêndulo e, utilizando
essa propriedade, teve a idéia de construir relógios que foram utilizados
até recentemente. Na verdade, até hoje: todos os relógios do Anglo são
controlados por um relógio de pêndulo que funciona desde 1950.
Em um dado ∆t:
(indic. correta) ⋅ T = (indic. errada) ⋅ T’
Se T’ T,
indicação errada indicação certa,
o relógio adianta.
Por exemplo, em 1 min o pêndulo errado dá
Resolva os exercícios 3, 4, 7 e 10, série 1.
Resolva os exercícios 19, 21, 22 e 23, série 1.
Resolva o exercício 28, série 1.
60
= 31
1,93
oscilações. Como o relógio está calibrado para indicar
2 s a cada oscilação, a cada minuto ele vai indicar
31 ⋅ 2 = 62 s. O relógio vai adiantar 2 s a cada minuto.
Foto do relógio do Anglo
ALFA-4 850150409
40
ANGLO VESTIBULARES
A idéia de Galileu de medir o tempo contando oscilações de um
pêndulo fez surgir na Europa, a partir do século 17, novos ramos de
atividade industrial e comercial. Alguns aperfeiçoamentos importantes foram introduzidos como, por exemplo, um sistema que compensa a variação de comprimento do pêndulo com a temperatura. Foram construídos
relógios para as igrejas, para os prédios públicos, carrilhões que anunciavam as horas, outros que indicavam as estações do ano, relógios cucos
e toda a sorte de invenções, úteis ou não, que acompanham as grandes
inovações tecnológicas.
Não só os relógios se desenvolveram durante os séculos 17 e 18.
Os navios também passavam por transformações, ganhando velocidade e
segurança ao mesmo tempo que as técnicas de navegação se tornavam
mais precisas. Mas havia um problema para o qual não havia solução
satisfatória. A determinação de longitude exigia relógios precisos, pois era
determinada pela comparação da hora local com a hora do ponto de saída,
ou de um ponto de referência.
D
trajetória
aproximada
h
A
→
R
→
O
R
A’
x
O
Orientando-se a trajetória para a direita e colocando-se a origem no
ponto O, a posição do corpo em cada instante é determinada pela abscissa x.
Observe que, adotando-se um critério de siB
→
nais para a resultante ( R a favor do eixo é positiva,
contra negativa) ela adquire sinal contrário ao de x.
→
→
A resultante é a soma vetorial das forças T e
→
T
→
P
P, o que leva à construção do triângulo ABC que é
semelhante ao triângulo ADO. Logo:
R/mg = x/h
A
→
C
Como h ≈ L, pois a amplitude é pequena, e adoR
tando-se o critério de sinais mencionado, vem:
R = – (mg/L) ⋅ x
(1)
A DINÂMICA DO SISTEMA MASSA-MOLA
Suponha um corpo apoiado em uma superfície plana horizontal sem
atrito e preso a uma mola de constante elástica k. Se o corpo é afastado
da posição de equilíbrio até atingir a posição A e a seguir abandonado, fica
→
→
→
sob ação das forças peso (P), normal (N) e força elástica (Fela). Como o
peso e a normal se equilibram, a resultante é igual a força elástica:
A
O
N
Fela
P
Orientando-se um eixo para a direita e adotando-se a origem na posição de equilíbrio do corpo, a abscissa x do corpo em cada instante é
igual à deformação da mola. Portanto, adotando-se o critério de sinais já
mencionado:
Relógio de pêndulo construído por Galileu
Até o início do século 18 utilizavam ampulhetas, mas o erro era
muito grande. A invenção do relógio de pêndulo em nada contribuiu para
resolver essa questão, pois esses relógios não funcionam a bordo por
causa das oscilações dos navios.
Bem ou mal iam tocando o barco quando, em 1707, uma esquadra
inglesa e o seu conceituado almirante se perderam nas rochas das ilhas
Scilly. A causa? Erro na determinação da longitude. Perder uma esquadra,
no apogeu da navegação inglesa, por acidente e não por ação inimiga, foi
humilhante e um prêmio de 10000 libras foi a recompensa oferecida pelo
governo inglês a quem resolvesse a questão. O resto de nossa história se
destina a mostrar a solução proposta, em 1735, que tornou famoso e
milionário o inglês John Harrison.
R = Fela = – kx
sendo k uma constante que não depende nem de x nem de Fela, mas
depende da mola.
MHS
Toda vez que a resultante das forças que agem num corpo obedecer à expressão
R = –(constante) ⋅ x
dizemos que está sob ação de uma resultante restauradora e que,
nessas condições, o corpo adquire um movimento periódico, denominado movimento harmônico simples (MHS).
DINÂMICA DE UM PÊNDULO OSCILANDO COM
PEQUENA AMPLITUDE
O movimento de um pêndulo oscilando com pequena amplitude é
aproximadamente retilíneo e, nessas condições, a resultante das forças
que agem no corpo pode ser considerada horizontal e sempre dirigida
para o ponto O indicado na figura a seguir.
ALFA-4 850150409
Essa constante vale mg/L no caso do pêndulo e é igual à constante
elástica da mola para o sistema massa-mola oscilando.
41
ANGLO VESTIBULARES
PERÍODO, FREQÜÊNCIA E PULSAÇÃO DE UM MHS
Como o MHS é periódico, podemos definir período e freqüência desse movimento.
Período é o menor intervalo de tempo para que uma dada situação física se repita. Por exemplo, é o tempo para o corpo abandonado em A
retorne ao ponto A.
Freqüência de um MHS é o número de vezes que uma dada situação física se repete, em uma determinada unidade de tempo. Por exemplo, é
o número de vezes que o corpo passa pelo ponto A em um minuto.
Por raciocínio análogo ao empregado, quando estudamos o MCU, podemos demonstrar que o período é o inverso da freqüência:
f = 1/T
A expressão 2π/T aparece inúmeras vezes nas deduções e exercícios de MHS. Daí a idéia de se definir uma grandeza física denominada pulsação (ω), tal que
ω = 2π/T = 2πf
NOMENCLATURA E OUTRAS CONSIDERAÇÕES
As considerações a seguir são válidas para um sistema massa-mola oscilando, para pêndulos oscilando com pequena amplitude bem como
para qualquer MHS, ou seja, para qualquer corpo sob ação de uma resultante restauradora, do tipo R = – (constante) ⋅ x.
1) A abscissa (x) de um corpo em MHS, também chamada elongação, varia entre um máximo e um mínimo. Denominamos amplitude (A) do
movimento ao valor máximo da elongação. Como o movimento é simétrico em relação à posição, de equilíbrio, adotando-se a origem nessa
posição, o valor de x está compreendido entre – A e A.
Em símbolos:
–A x A
2) A energia mecânica de um corpo em MHS é constante
εp + εc = constante
sendo
εp = 1 (constante) x2 e
2
εc =
1
mv2
2
DESCREVENDO UMA OSCILAÇÃO
A descrição que se segue é válida para um corpo oscilando preso a uma mola, para um pêndulo simples ou para qualquer corpo em MHS.
Vamos supor que o corpo seja abandonado do ponto A (posição extrema esquerda), como o corpo está sob ação de uma resultante para a direita,
adquire MRA para a direita. Ao atingir o ponto O, a velocidade é máxima.
Desse ponto em diante passa a agir uma força no sentido contrário ao movimento. O corpo adquire MRR até parar em A’.
Ao atingir A’, sua velocidade é nula, mas o corpo está sob ação de uma resultante para a esquerda que causa um MRA. O corpo retorna ao ponto A e,
assim, sucessivamente.
Na figura a seguir estão indicados os valores das grandezas: tempo, elongação, velocidade, resultante e aceleração nas posições extremas e na
posição central.
A
A → A’
A’
instante
0
T/4
T/2
posição
x = –A
x=0
x = +A
velocidade
v=0
MRA
v é máx
resultante
R=0
aceleração
a=0
A’ → A
instante
ALFA-4 850150409
0
MRR
v=0
0
A
A’
T
posição
x = –A
velocidade
v=0
3T/4
T/2
x=0
|v| é máx
MRR
resultante
R=0
aceleração
a=0
42
x = +A
MRA
v=0
ANGLO VESTIBULARES
GRÁFICOS
A descrição de uma oscilação apresentada, permite esboçar os gráficos da elongação (x), da velocidade (v) e da resultante (R) de um corpo em MHS.
Se o corpo é abandonado do ponto A (extremidade esquerda), no instante t = 0, a elongação é x = –A. Passado um tempo igual a
ge a origem e, nesse ponto, a elongação é nula. No instante
instantes
1
T, o corpo atin4
1
T, o corpo atinge a outra extremidade, ponto A’, no qual a elongação é x = +A. Entre os
2
T
e T o corpo percorre o caminho de volta.
2
T
3T
T
e T, a velocidade é nula. No instante
a velocidade é máxima. No instante
a velocidade tem
2
4
4
novamente módulo máximo, mas sinal negativo.
A resultante tem intensidade proporcional à elongação, mas sinal (respeitando-se a convenção apresentada) contrário a ela. Portanto, o gráfico da
resultante em função do tempo pode ser obtido do gráfico da elongação.
Nas posições extremas, instantes 0,
x
A
T
3T/4
0
T/4
tempo
T/2
–A
v
vmax
T
3T/4
0
T/4
tempo
T/2
– vmax
R
T/2
0
T/4
3T/4
T
tempo
EQUAÇÃO FUNDAMENTAL DO MHS
É possível demonstrar que, no MHS, independentemente da situação física particular em estudo (pode ser um corpo oscilando preso a uma mola,
um pêndulo oscilando, um diapasão vibrando), a aceleração está relacionada à elongação (x) pela expressão:
a = – ω2x
Observe que:
(Se você tem interesse na demonstração dessa expressão, leia os itens 1 a 4 da unidade III, capítulo 1 do livro 3).
• A intensidade da aceleração é diretamente proporcional à intensidade da elongação.
• O sinal negativo da expressão indica que, no MHS, a aceleração tem sempre o sentido contrário à elongação.
• Como o MHS é um movimento retilíneo, a aceleração centrípeta é nula. Logo, nesse movimento a aceleração escalar e a vetorial têm intensidades iguais.
• ω = 2 π/T é a pulsação do movimento.
• Essa propriedade do MHS pode ser colocada nos seguintes termos:
se R = –(constante) ⋅ x, então a = – ω2x
ALFA-4 850150409
43
ANGLO VESTIBULARES
PERÍODO DE UM SISTEMA MASSA-MOLA
Num sistema massa-mola
R = Fela = – kx (1)
R = mγ
De acordo com o princípio fundamental da dinâmica
No caso particular do movimento retilíneo
R = ma (2)
Como R = – (constante) ⋅ x, então
a = – ω2x (3)
– kx = m(– ω2x)
Substituindo (1) e (3) em (2):
ω = 2π/T
Lembrando que
m
k
T = 2π
Obtemos o período de oscilação de um sistema massa-mola.
PERÍODO DE UM PÊNDULO SIMPLES
R = – (mg/L) ⋅ x (1)
Se um pêndulo está oscilando com pequena amplitude
R = mγ
De acordo com o princípio fundamental da dinâmica
No caso particular do movimento retilíneo
R = ma (2)
Como R = – (constante) ⋅ x, então
Substituindo (1) e (3) em (2):
a = – ω2x (3)
– (mg/L) ⋅ x = m(– ω2x)
ω = 2π/T
Lembrando que
T = 2π
Obtemos o período de oscilação de um pêndulo simples.
L
g
UMA OBSERVAÇÃO IMPORTANTE
m
vale tanto para o movimento horizontal como vertical. Vale também para o caso do corpo
k
estar apoiado em um plano inclinado. No primeiro e no terceiro casos o atrito deve ser desprezível. Em qualquer um dos três casos o corpo adquire
MHS em torno da posição de equilíbrio.
É possível demonstrar que a expressão T = 2π
(a)
(b)
(a)
(c)
A
O
(b)
(c)
A
O
A’
A’
a) posição de equilíbrio
b) o corpo é tirado da posição de equilíbrio
c) o corpo oscila em torno da posição de equilíbrio com período T = 2π
m
k
A IMPORTÂNCIA DA OBSERVAÇÃO IMPORTANTE
O fato do período do sistema massa-mola não depender da direção do movimento, foi a fonte de inspiração de John Harrison para a criação de
um relógio que continuasse dando indicação correta, mesmo que fosse podendo ser utilizado em embarcações. Com base em sua idéia, foi possível
a construção de relógios portáteis. Por mais de 150 anos as pessoas utilizaram os relógios de bolso até que, no início do século 20, um certo Santos
Dumont teve a idéia de prendê-lo ao pulso, para facilitar a leitura sem ter de tirar as mãos dos comandos das aeronaves.
O sistema John Harrison, com os devidos aperfeiçoamentos, foi utilizado até 1970 aproximadamente, quando apareceram os relógios de quartzo,
que não fazem parte dessa história.
OBSERVAÇÃO FINAL
10 000 libras corresponderiam hoje a mais de 10 milhões de dólares.
ALFA-4 850150409
44
ANGLO VESTIBULARES
Aula 36
EQUAÇÃO FUNDAMENTAL DA DINÂMICA PARA VALORES MÉDIOS
2. Uma bola de bilhar, de massa 0,4kg, movimentando-se a
uma velocidade 10m/s na direção e sentido indicados na figura, choca-se contra a tabela da mesa. Sabe-se que após a colisão, que durou 1ms, a velocidade da bola continua sendo
10m/s. Determinar, desprezando eventuais atritos, a força
aplicada pela bola na tabela.
Exercícios
1. No disparo de uma arma, há uma rápida transformação de
um sólido (explosivo) em gases que impulsionam o projétil.
Se um projétil de massa 100g gasta 2ms (2 milisegundos)
para percorrer o cano, saindo da arma com velocidade
800m/s, determinar, desprezando o atrito entre o projétil e
o cano, a força média aplicada pelos gases no projétil.
10 m/s
30°
30°
→
10 m/s
F
∆t
144444424444443
mv
v = 800 m/s
60°
∆Q
mv
→
∆Q
Rm =
∆t
→
Rm =
→
→
Rm =
∆Q
∆t
→
∆Q
∆t
→
Rm = Fm (perpendicular à tabela)
→
∆Q
Fm =
∆t
→
Rm Fm
∆Q = m(v – v0)
∆Q = 80 kg ⋅ m/s
∆t = 2 ms = 2 ⋅ 10 – 3 s
Fm = 40 ⋅ 103 N
intensidade: Fm =
∆Q
∆t
→
∆Q
Fm =
direção: perpendicular à tabela.
∆t
→
sentido: ver figura
∆Q = mv = mv’ = 4 kg ⋅ m/s
Fm =
∆Q
= 4 ⋅ 103 N
∆t
ORIENTAÇÃO DE ESTUDO
Livro 1 — Unidade IV
Caderno de Exercícios — Unidade IV
Tarefa Mínima
ALFA-4 850150409
45
•
Leia o texto teórico da Tarefa Complementar.
•
Resolva os exercícios 1, 2, 4, 8 e 9, série 2.
ANGLO VESTIBULARES
2. EQUAÇÃO FUNDAMENTAL DA DINÂMICA
PARA VALORES MÉDIOS
Tarefa Complementar
→
• Resolva os exercícios 15, 17, 19 e 21, série 2.
Vamos supor que a velocidade de um corpo seja v num instante t
e v ’, num instante t’. Para que haja essa mudança de velocidade, o sistema deve estar sob ação de um sistema de forças, cuja resultante pode
ser constante ou variável.
→
LEITURA COMPLEMENTAR
DINÂMICA IMPULSIVA
Podemos aplicar a equação fundamental da
→
→
dinâmica para valores médios. Sendo Rm e γm
a resultante média e aceleração média, então:
1. QUANTIDADE DE MOVIMENTO
A teoria da Dinâmica Impulsiva foi criada para os casos nos quais se
deseja relacionar uma interação, ocorrida num intervalo de tempo bem
determinado, com a variação de velocidade.
O problema pode ser colocado da seguinte forma: Um corpo de
→
massa m está a uma velocidade v . Um sistema de forças age em um
determinado intervalo de tempo ∆t causando uma alteração na veloci→
dade, que passa a ser v ’.
Vamos tomar, como exemplo, o choque de uma bola de bilhar contra a tabela da mesa. A força exercida pela bola sobre a tabela — ou pela
tabela sobre a bola — depende de pelo menos dois fatores: da massa,
da bola e da velocidade.
Para resolver esses casos, bem como muitos outros análogos, julgouse conveniente criar uma nova grandeza, denominada quantidade de movimento que leva em conta tanto a massa do corpo como sua velocidade.
→
Se um corpo de massa m está a uma velocidade
v , num determi→
nado instante t, define-se quantidade de movimento (Q) no instante considerado como sendo a grandeza vetorial:
→
= m⋅
Mas, m ⋅ ∆v = ∆Q. Logo:
→
Rm
=
→
→
∆v
∆t
→
∆Q
∆t
A equação fundamental da dinâmica para a valores médios
→
→
→
→
→
∆Q
Rm =
pode ser escrita na forma: Rm ⋅ ∆t = ∆Q. O produto Rm ⋅ ∆t
t
∆
é chamado impulso da resultante:
→
IR
→
→
= Rm ⋅ ∆t
A unidade do impulso é uma unidade de força multiplicada por uma
unidade de tempo. No sistema internacional: N ⋅ s
Como o impulso é obtido pelo produto de uma grandeza vetorial (Rm)
por uma grandeza escalar positiva (∆t), ele apresenta as seguintes características:
→
intensidade: IR = Rm ⋅ ∆t
→
direção: a mesma de Rm
→
I = Rm ⋅ ∆t
A unidade de quantidade de movimento é uma unidade de massa
multiplicada por uma unidade de velocidade. No sistema internacional:
kg ⋅ m/s
Como, no intervalo de tempo em que houve a interação, a →
veloci→
→
dade passa de v , para v ’ a quantidade de movimento passa de Q para
→
Q’. A variação de quantidade de movimento será:
→
sentido: o mesmo de Rm
Pode acontecer do valor médio da resultante ser desconhecido, mas
a resultante é conhecida em cada instante e apresenta direção constante.
O impulso apresenta as seguintes características:
→
→
→
∆Q = Q’ – Q = mv
’ – mv
= m∆→
v
→
IR
→
Para determinar a variação de quantidade de movimento ∆Q, va→
→
→
mos representar Q e Q’ com uma origem comum. ∆Q é o que falta pa→
→
ra Q
se transformar em Q’. Ou
seja, é o que falta para a extremidade
→
→
de Q atingir a extremidade de Q’.
14243
→
→
Rm
→
→
3. IMPULSO DA RESULTANTE E TEOREMA DO IMPULSO
intensidade: Q = mv
direção: a mesma de →
v
sentido: o mesmo de →
v
→
∆v
:
∆t
→
Como a quantidade de movimento é definida pelo produto de uma
grandeza vetorial ( →
v ) por uma escalar positiva (m), apresenta as seguintes características:
→
= m ⋅ γm
Como →
γm =
Q = mv
→
Q = mv
→
Rm
intensidade: área sob o gráfico de R em função de t (ver figura).
direção: a mesma da resultante.
sentido: o mesmo da resultante no intervalo considerado.
R
Figura (a): quantidade de movimento antes e depois do choque.
Figura (b): variação de quantidade de movimento.
→
v
(a)
(b)
I
→
Q
→
→
Q’
Q
t
→
Partindo-se da equação fundamental da dinâmica para a valores
médios e da definição de impulso, chegamos ao Teorema do impulso:
∆Q
→
IR
→
v’
→
= ∆Q
→
Q’
ALFA-4 850150409
(O Impulso da resultante é a variação da quantidade de movimento)
46
ANGLO VESTIBULARES
Aulas 37 e 38
TEOREMA DOS SISTEMAS ISOLADOS
3. Dois corpos A e B, de massa MA = 2 kg e MB = 5 kg estão
inicialmente em repouso e apoiados sobre uma superfície
plana, horizontal, sem atrito. Entre os corpos há uma mola inicialmente comprimida e que não está presa aos corpos. Inicialmente a mola é impedida de se distender por
um fio que liga os corpos.
ENUNCIADOS DO TEOREMA DOS
SISTEMAS ISOLADOS
→
1) A quantidade de movimento de um sistema isolado (Fext = 0)
é constante.
2) Forças internas não alteram a quantidade de movimento de
um sistema.
3) Em símbolos:
→
fio
A
→
ΣFext = 0 ⇒ Qsist = const.
B
Quando o fio é cortado, os corpos são acelerados pela mola.
No instante em que o corpo A se destaca da mola, sua velocidade é 10m/s.
Pede-se, nesse mesmo instante:
a) a velocidade do corpo B;
b) esboçar o gráfico da velocidade em função do tempo para os dois corpos;
c) a velocidade relativa de separação entre os corpos;
d) a energia cinética inicial do sistema;
e) a energia cinética final do sistema;
f) a energia potencial elástica armazenada inicialmente na
mola.
Exercícios
1. Dois patinadores, de massas 60kg e 80kg, deslizam sobre
um plano horizontal sem atrito com velocidade 10m/s. Subitamente, o de massa 60kg empurra o outro, que aumenta
sua velocidade até atingir 13m/s, quando então perdem o
contato. Nesse instante a velocidade do patinador de massa
60kg será
a) 14 m/s.
b) 4,0 m/s.
c) 6,0 m/s.
d) 3,0 m/s.
e) nula.
a) Q = Q’
0 = MAvA + MBvB
0 = 2 ⋅ (– 10) + 5 vB
vB = 4 m/s
M1v1 + M2v2 = M1v’1 ⋅ M2 v’2
(60 + 80) 10 = 80 ⋅ 13 + 60 ⋅ v’2
140 = 104 + 6 v’2
v’2 = 6 m/s
b)
vB = 4 m/s
vrel
vA = – 10 m/s
2. Uma bomba inicialmente em repouso explode em três partes
iguais. Assinalar a alternativa na qual estão melhor representadas as velocidades de cada fragmento imediatamente após
a explosão.
v
a)
d) v
v
c) vrel = vB – vA = 14 m/s
d) εci = 0
v
v
e) εcf = 1 MAvA2 + 1 MAvB2
2
2
v
b)
e)
v
v
v
120°
45°
v
εcf = 1 2(10)2 + 1 5(4)2 = 140 J
120°
2
120°
f) (εp + εc)i = (εp + εc)f
εpi + 0 = 0 + 140
v
v
c)
2
εpi = 140 J
v
v
v
ALFA-4 850150409
47
ANGLO VESTIBULARES
AULA 38
ORIENTAÇÃO DE ESTUDO
•
•
Livro 1 — Unidade IV
Resolva os exercícios 5 a 8, série 3.
Resolva os exercícios 9 e 11, série 3.
Caderno de Exercícios — Unidade IV
Tarefa Complementar
Tarefa Mínima
AULA 38
•
AULA 37
•
•
Resolva os exercícios 12, 13, 14 e 18, série 3.
Leia os itens 10 e 12, cap. 1.
Resolva os exercícios 2, 3 e 4, série 3.
ALFA-4 850150409
48
ANGLO VESTIBULARES