Uma Dupla da Pesada – Café-com-Byte
Felipe Maxsuel Carvalho; Gustavo Campos Almeida; Henrique Luis Pereira de Almeida; Jonas
Sousa Santos; José Márcio Santos Mendes; Talles Gabriel Sousa Caputo; Yuri Reis de Castro
Orientadores: Alda de Paiva Castro e Ronaldo Antônio de Castro.
ESCOLA ESTADUAL “AFONSO PENA JÚNIOR”
Praça Ministro Gabriel Passos, 587, Centro
36350-000 – São Tiago – MG
[email protected]
Abstract: This article deals with the assembly
strategies and programming autonomous
robots footballers, called Stain and Kenny: A
pair of heavy, emphasizing some technical
specifications and explaining in detail that it
is the project. The article highlights how the
programming of robots was done using the
environment Bricx Command Center, as is
the challenge proposed by the RoboCup
Soccer Junior Open, referring to the
conditions of the matches, and how the Cafécom-Byte team built the their robot soccer,
which in the case, was using the pieces of
LEGO Kit.
Keywords : CBR 2015, BricxCC, Stain,
Kenny, RoboCup, Café-com-Byte.
Resumo: Este artigo trata das estratégias de
montagem e programação de robôs
autônomos
jogadores
de
futebol,
denominados Stain e Kenny: Uma dupla da
pesada, ressaltando algumas especificações
técnicas e explicando detalhadamente de que
se trata o projeto. O artigo destaca como foi
feita a programação dos robôs, utilizando o
ambiente Bricx Command Center, como é o
desafio proposto pela RoboCup Soccer
Junior Open, referindo-se as condições das
partidas, e como a equipe Café-com-Byte
construiu os seus robôs de futebol, que, no
caso, foi utilizando as peças do Kit LEGO.
Palavras-chave : CBR 2015, BricxCC, Stain,
Kenny, RoboCup, Café-com-Byte.
I - INTRODUÇÃO
A equipe Café-com-Byte é formada por
alunos do ensino fundamental e médio (9º ano
do ensino fundamental, 1º e 2° ano ensino
médio). Por meio desse artigo temos como
objetivo descrever o projeto desenvolvido para
competir na LARC/CBR 2015[5] (XIV
Competição Latina Americana de Robótica e
XIII Competição Brasileira de Robótica) na
categoria RoboCup Soccer Junior Open. Para
isso, a equipe desenvolveu robôs autônomos
capazes de participar de um jogo de futebol,
onde deverão atuar como goleiro (Stain) e
atacante (Kenny).
II – O DESAFIO
A competição consiste na simulação de
uma partida de futebol, onde dois times de dois
robôs cada se enfrentam. O objetivo é marcar
gols no time adversário e dominar os oponentes
dentro do campo de jogo, ou seja, formar um
sistema defensivo que não deixe o time
adversário joguem e ataquem, para que, assim,
não façam gols.
A - O campo
O campo de jogo é de 122 cm por 183
centímetros. O campo é marcado por uma linha
branca no qual é parte do campo de jogo.
Ao redor do campo de jogo, além da
linha branca, existe uma área exterior de largura
30 cm. O total das dimensões do campo,
incluindo a área exterior, é 182 centímetros por
243 centímetros.
No campo existem dois gols de 60 cm
largura, 10 cm de altura e 74 mm de
profundidade, em forma de caixa. Eles têm uma
barra transversal na parte superior (para impedir
a entrada de robôs a objetivo e permitem
verificar se a bola marcou).
Existem cinco pontos neutros definidos
no campo. Um é no centro do campo. Os outros
quatro são adjacentes a cada canto, localizados a
45 centímetros ao longo da borda longa do
campo, alinhado com cada poste do gol.
B – A Bola
A bola vai emitir raios infravermelhos
(IR) de luz. Esses raios farão com que os robôs
encontrem a bola, através do sensor de
infravermelho presente nos mesmos.
C – O jogo
O jogo é composto de duas metades. A
duração de cada tempo é de 10 minutos. Haverá
um intervalo de 5 minutos entre as metades.
Outros detalhes sobre as partidas da
competição podem ser vistos nas regras da
competição [6].
D – Restrições de montagem dos robôs
Quanto ao tamanho:
Os robôs podem ter no
máximo vinte e dois centímetros de diâmetro.
Quanto à altura:
Os robôs podem ter até vinte e
dois centímetros de altura. (a alça para pegar o
robô pode ultrapassar os vinte e dois
centímetros).
Quanto ao peso:
Cada robô pode pesar até no
máximo 2,400 gramas (2,4 quilogramas).
Quanto à comunicação:
Os
robôs
não
estão
autorizados a usar qualquer tipo de
comunicação durante o jogo, a menos que a
comunicação entre dois robôs é via Bluetooth
classe 2 ou classe 3 (intervalo inferior a 20
metros) ou via ZigBee.
Os robôs possuem uma zona de captura
de bola para efetuar o “domínio” da bola, com a
ajuda do “dribbler”. Essa zona de captura pode
ter, no máximo, três centímetros.
III – OS ROBÔS
Os robôs, Stain e Kenny, possuem
controladores lógicos programáveis, do kit
Mindstorms NXT[3] da LEGO, conhecidos
como o cérebro do robô (blocos), onde é
processada a lógica, que foi criada em
programas específicos, no nosso caso, Bricx
Command Center. O NXT, ao receber
informação dos sensores, a processa de acordo
com a programação, o que possibilita a tomada
de decisões.
O robô estando pronto para realizar
todos os objetivos de uma partida de futebol
como, procurar a bola, chutar ao gol e se
comunicar com o companheiro (um de nossos
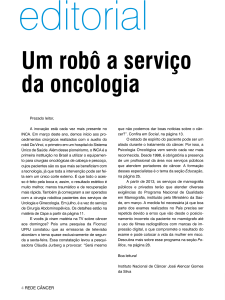
maiores objetivos). Stain e Kenny foram
projetados utilizando kits de montagem LEGO
Mindstorms NXT (Figura 1) e peças
confeccionadas pela equipe. Estes contêm cinco
servos motores, um sensor de bússola, um
sensor infravermelho e quatro sensores
ultrassônicos, cada robô.
Figura 1 - Principais peças dos robôs
A – O robô atacante
Kenny,
o
robô
atacante,
foi
desenvolvido utilizando os seguintes itens:
cinco servo-motores : sendo três para a
movimentação do robô, ou seja, as
rodas, um para o chute do robô, e um
para o domínio da bola. A utilização de
três motores para a movimentação do
robô permite movimentos mais
elaborados. Ou seja, ao invés de poder
andar apenas para frente e para trás, e
virar (únicos movimentos permitidos
utilizando apenas dois motores), o robô
será capaz também de andar de lado,
por exemplo.
um sensor de bússola : responsável por
retornar a localização do robô no
campo, o que possibilita saber se o
robô está no ataque, na defesa ou no
meio do campo.
um sensor infravermelho : responsável
por retornar a posição da bola em
relação ao robô. Dessa forma, o robô
poderá saber se a bola está a sua frente,
ao seu lado ou atrás de si.
quatro sensores ultrassônicos :
responsáveis pela localização do robô
no campo, e por retornar se há ou não
algum obstáculo na frente do robô,
possibilitando uma tentativa de drible
ao obstáculo.
B – O robô goleiro
Stain, o robô goleiro, foi projetado da
mesma forma que o robô atacante. Kenny, com
cinco motores, quatro sensores ultrassônicos
(dois desses, agora com função de manter o
robô no centro do gol, dependendo da situação
de jogo), um sensor de bússola e um sensor
infravermelho.
A ideia de utilizar o robô goleiro
idêntico ao robô atacante veio da estratégia de
tentar fazer um goleiro linha capaz de jogar
junto ao atacante, o que proporcionaria uma
estratégia mais complexa e melhor, já que, dessa
forma, haveriam mais possibilidades de se fazer
jogadas, uma vez que, essas seriam mais
planejadas.
IV – ESTRATÉGIAS
Este item falará sobre as estratégias
utilizadas pela equipe no desenvolvimento dos
robôs, dando destaque aos meios usados nas
programações dos mesmos, os sensores que
foram utilizados para que fosse possível a
realização do projeto, e como foi estabelecido
os meios de comunicação entre os robôs durante
a partida.
ultrassônicos detectam a distância de certo
objeto em relação ao robô. No atacante, depois
que ele se posiciona com o auxílio da bússola
no gol calcula a distância para poder efetuar o
chute , além de detectar a distancia de jogadores
de outros times. No goleiro, para que ele possa
sempre ficar posicionado em frente o gol e
identificar outros robôs adversários.
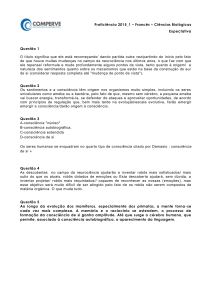
Sensores Infravermelhos (Figura 2):
como a bola do futebol emite raios
infravermelhos, este sensor é utilizado
estrategicamente para localizá-la, evitando
assim que ele fique “cego” e possa dessa forma
efetuar um maior numero de gols. Estas ondas
de frequência são abaixo do vermelho, portanto
invisível aos olhos humanos, esse sensor atribui
diferentes números para a posição de onde a
onda infravermelha é emitida.
A - Programação
Atacante: utilizando dois blocos
programáveis, quatro sensores ultrassônicos, um
sensor de bússola e um infravermelho, Kenny é
programado
utilizando
linguagem
de
programação NXC[1], no ambiente Bricx
Command Center[2]. Este por sua vez necessita
de um espaço interno para que possa se
movimentar juntamente com a bola (estratégia
mais conhecida como dribbler) também faz uso
de dois servos motores, um para auxílio deste
movimento e um para chute quando for
localizado o gol do adversário. Para movimento
e localização do robô na pista fizemos uso de
três servos motores e rodas omnidirecionais e
um sensor de bússola. Possui também um sensor
infravermelho que será explicado no próximo
ícone.
Goleiro: utilizando o ambiente de
programação Bricx, na linguagem C, Stain
contém dois blocos programáveis, quatro
sensores ultrassônicos, um sensor de bússola e
um sensor infravermelho. Na tentativa de deixálo ágil e compacto foi estruturado com três
servos motores para locomoção na pista
(campo), um motor para o domínio e um para o
chute.
B - Sensores
Sensores de Bússola: estes cooperam
para o posicionamento dos robôs no campo, que
define graus às posições onde ele se encontra
sempre em relação ao Norte Geográfico, útil
para localizar a posição exata do gol adversário,
para evitar gols contras e no caso do goleiro
para permanecer sempre “de frente” para o
campo.
Sensores Ultrassônicos: os sensores
Figura 2 - Valores do sensor infravermelho
C – Comunicação
Utilizamos a comuncação Bluetooth[4]
presente nos blocos NXTs para fazer com que
os blocos de cada robô se comuniquem, e os
robôs também se comuniquem entre si.
A primeira comunicação acontece para
que um bloco possa receber informações do
outro. Como cada bloco suporta apenas quatro
sensores, foi necessária uma divisão entre os
dois. Ou seja, se um sensor conectado ao Bloco
2 recebe alguma informação importante para o
funcionamento do robô, mas o motor que
necessita dessa informação para agir está
conectado ao Bloco 1, o Bloco 2 envia essa
informação via Bluetooth ao Bloco 1, que ao
recebê-la e interpretá-la irá ordenar ao servomotor que execute a ação de acordo com a
programação. O mesmo processo ocorre caso o
Bloco 1 tenha uma informação que o Bloco 2
precise.
Já a segunda comunicação, que é feita
entre os dois robôs, serve para que eles possam
executar as jogadas dentro campo. Ou seja, caso
o robô atacante queira passar a bola para o
goleiro, ou vice-versa, o destinatário da bola
enviará a informação de sua atual posição ao
possuidor da bola, para que, assim, esse possa
se virar de forma correta e mandar a bola para a
posição certa.
V – PROSPOSTAS FUTURAS
Os objetivos da equipe para o futuro
envolvem a criação de robôs mais
desenvolvidos, que não sirvam apenas para
competições de robótica, mas, também, para o
bem estar da população e para aplicações de alta
tecnologia. Entre os exemplos, podemos citar a
criação de drones, computadores inteligentes e
exos esqueletos.
Dentro da área de competições de
robóticas, pretendemos implementar os robôs de
futebol, para que possam simular melhor uma
partida de futebol. Além disso, pretendemos
utilizar os conhecimentos adquiridos com o
atual projeto para desenvolver outro robôs para
competições diferentes, como a dança, o
CoSpace e o resgate.
VI – CONSIDERAÇÕES FINAIS.
Com o atual projeto, a equipe Cafécom-Byte aprendeu o como é importante o
trabalho em equipe para o desenvolvimento de
atividades, já que, várias “cabeças” pensam
muito melhor que uma. Além disso, pudemos
perceber o quão necessário é a persistência
quando os problemas acontecem, pois sem ela, a
equipe teria se rendido ao desafio no primeiro
problema, dos muitos que foram encontrados
durante o desenvolvimento.
REFERÊNCIAS BIBLIOGRÁFICAS
[1]http://nera.sr.ifes.edu.br/wpcontent/uploads/2012/01/ProgramandoRob%C3%B4s-Lego-NXT-comNXC1.pdf
Programando Robôs Lego NXT
usando NXC
Apostila utilizada pela equipe
para a programação do robôs.
[2]http://bricxcc.sourceforge.net/
Bricx Command Center
Ambiente
de
programação
utilizado na programação
[3]http://www.lego.com/enus/mindstorms/?domainredir=mindstor
ms.lego.com
LEGO Mindstorms
Kit de peças utilizados pela
equipe
[4]http://kixaberatech.blogspot.com.br/2
010/09/conhecendo-comunicacaobluetooth-com.html
Bluetooth no LEGO NXT
Exemplo de conexao bluetooth
utilizado no aprendizado da
técnica.
[5]http://www.cbrobotica.org/?lang=pt
Competição
Brasileira
de
Robótica 2015
Site oficial da competição.
[6]http://www.cbrobotica.org/wpcontent/uploads/soccer_2015.pdf
Regras da RoboCup Soccer
Junior
Utilizadas para entendimento do
desafio.