Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
Experiência II
Teste de carga do motor de indução trifásico
1. Introdução
O motor de indução trifásico tem características de funcionamento típicas como as
mostradas nas Figuras 1 e 2 [1], [2]. A Fig. 1 mostra as curvas de escorregamento,
rendimento, fator de potência e corrente absorvida pelo motor em função da potência no
eixo da máquina. Ela é obtida para baixos valores de escorregamento (ou altas
velocidades). Já a Fig. 2 apresenta o primeiro quadrante da curva de torque do motor em
função da velocidade de rotação. Esta última curva também é muitas vezes dada em função
do escorregamento.
Fig. 1. Características de funcionamento típicas de motores de indução trifásicos para
baixos valores de escorregamento (altas velocidades) ([1]).
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
Fig. 2. Primeiro quadrante da característica torque em função da velocidade para
motores de indução trifásicos ([2]).
A Tabela I define os diferentes torques que aparecem nesta figura [1], [2]. Estas
características são típicas do funcionamento em regime permanente destas máquinas. Isto
significa que as medidas experimentais são feitas com formas de onda senoidais de tensão e
corrente aplicadas ao motor, sendo que os valores destas grandezas são registrados após o
desaparecimento dos transitórios elétricos e mecânicos.
O objetivo desta aula prática de laboratório é o levantamento das curvas mostradas
na Fig. 1 para um motor trifásico específico disponível no Laboratório de Máquinas e
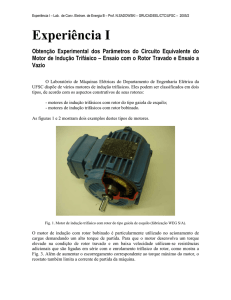
Acionamentos Elétricos WEG do Departamento de Engenharia Elétrica da UFSC. A Fig. 3
mostra os dados de placa da máquina em questão, onde pode-se verificar tratar-se de um
motor classe N. As bobinas do estator estão ligadas para a tensão entre fases de 380 Volts.
Fig. 3. Placa do motor de indução trifásico a ser ensaiado.
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
Tabela I. Diferentes torques que aparecem na curva de torque em função da velocidade para
motores de indução trifásicos.
Torque ou Conjugado
Conjugado nominal ou de plena carga
Conjugado com rotor bloqueado ou
conjugado de partida
Conjugado mínimo
Conjugado máximo
Descrição
É o conjugado desenvolvido pelo motor à
potência nominal, sob tensão e freqüência
nominal
É o conjugado mínimo desenvolvido pelo
motor bloqueado, para todas as posições
angulares do rotor, sob tensão e freqüência
nominais. Observações:
a) Esta definição de conjugado de partida
leva em conta o fato de que o conjugado
com o rotor bloqueado pode variar um
pouco conforme a posição em que se trava o
motor.
b) Na prática, o conjugado de rotor
bloqueado deve ser o mais alto possível,
para que o rotor possa vencer a inércia
inicial da carga e possa acelerá-la
rapidamente, principalmente quando a
partida se dá com tensão reduzida.
É o menor conjugado desenvolvido pelo
motor ao acelerar desde a velocidade nula
até a velocidade correspondente ao
conjugado máximo. Observação:
a) Na prática este valor não deve ser muito
baixo, isto é, a curva não deve apresentar
uma depressão acentuada na aceleração,
para que a partida não seja muito demorada,
sobreaquecendo o motor, especialmente nos
casos de alta inérica ou partida com tensão
reduzida.
É o maior conjugado desenvolvido pelo
motor, sob tensão e freqüência nominal,
sem queda brusca de velocidade. Na prática,
o conjugado máximo deve ser o mais alto
possível, por duas razões principais:
a) O motor deve ser capaz de vencer, sem
grandes dificuldades, eventuais picos de
carga como pode acontecer em certas
aplicações, como em britadores, calandras,
misturadores e outras.
b) O motor não deve arriar, isto é, perder
bruscamente a velocidade quando ocorrem
quedas de tensão momentâneas.
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
No Brasil, as classes ou categorias de motores de indução trifásicos de gaiola, para
tensão nominal igual ou inferior a 600 V, potência nominal igual ou inferior a 630 kW (856
cv) e previstos para partida direta ou estrela-triângulo são definidas pela norma NBR 7094
[3]. Conforme as suas características de conjugado em relação à velocidade e corrente de
partida, os motores de indução trifásicos com rotor de gaiola são classificados segundo sua
adequação ao acionamento de um tipo de carga:
a) Categoria N: motores com conjugado de partida normal, corrente de partida normal,
baixo escorregamento. Constituem a maioria dos motores encontrados no mercado e
prestam-se ao acionamento de cargas normais, como bombas, máquinas operatrizes,
ventiladores.
b) Categoria H: conjugado de partida alto, corrente de partida normal, baixo
escorregamento. Usados para cargas que exigem maior conjugado na partida, como
peneiras, transportadores carregadores, cargas de alta inércia, britadores, etc.
c) Categoria D: conjugado de partida alta, corrente de partida normal, alto
escorregamento (mais de 5%). Usados em prensas excêntricas e máquinas
semelhantes, onde a carga apresenta picos periódicos. Usados também em
elevadores e cargas que necessitam de conjugados de partida muito altos e corrente
de partida limitada. As curvas conjugado versus velocidade das diferentes
categorias podem ser vistas na Fig. 4.
Fig. 4. Curvas torque ou conjugado versus velocidade das diferentes categorias de motores de indução
trifásicos de gaiola, segundo norma NBR 7094 ([2]).
d) Categoria NY: esta categoria inclui os motores semelhantes aos de categoria N,
porém, previstos para partida estrela-triângulo.
e) Categoria HY: inclui os motores semelhantes aos de categoria H, porém previstos
para partida estrela-triângulo.
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
Nos ensaios, o acionamento do motor é assegurado através da bancada de ensaio de
máquinas elétricas fabricada pela WEG e mostrada na Fig. 5. Esta bancada compreende a
mesa de comando (e os dispositivos de proteção e fontes instaladas no cofre blindado) e um
dinamômetro ou freio de Foucault. Este último mostrado em maiores detalhes na Fig. 6
impõe um torque de carga ao motor à medida que injeta-se corrente contínua nos dois
enrolamentos que são ligados em série. A Fig. 7 mostra esquematicamente o mecanismo de
geração de forças tangenciais e conseqüentemente do torque.
Fig. 5. Bancada de ensaio de máquinas elétricas.
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
Fig. 6. Dinamômetro ou freio de Foucault.
O mecanismo de geração das forças pode ser entendido supondo-se que a velocidade nos
dois pontos do disco de alumínio em frente aos pólos da armadura do dinamômetro seja v t ,
como indicado no desenho. Admitindo que as densidades de fluxo magnético B , oriundas
pela corrente injetada nos enrolamentos de armadura, tenham as direções indicadas na
figura, densidades de corrente elétrica J aparecerão no disco devidas à interação entre v t e
B conforme a equação abaixo [4]
J = σ E = σ ( v t × B)
(1)
onde σ é a condutividade elétrica e E é o campo elétrico. Por outro lado, a interação entre
as densidades de fluxo magnético e estas correntes origina forças que obedecem a lei
F = J×B
(2)
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
Fig. 7. Esquema do freio de Foucault.
e que têm a direção indicada na Fig. 7. Note que estas forças se opõem à rotação e geram
portanto um torque resistente conforme a relação abaixo onde r é o braço de alavanca
ligando o centro do disco aos pontos onde estão indicados os vetores B
T = r×F
(3)
2. Procedimento experimental
Antes de se efetuar o ensaio propriamente dito, deve-se escolher os taps dos
transformadores de potencial e de corrente em função das características do motor que será
ensaiado (380 V, 750 W, 1.78 A nominais).
1) Preparação do ensaio:
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
a) Acionar as botoeiras “Reset Sobrecorrente” e “Reset Sobretensão” se as luzes
indicativas destas anomalias estiverem acesas.
b) Escolher a tensão de teste C.A.”: ligar a botoeira “LIGA 380V”.
c) Escolher os taps dos transformadores de potencial: acionar a botoeira “LIGA
440V” que é a adequada para a alimentação até 380 V do motor. As leituras de
tensão deverão ser multiplicadas por 4.
d) Escolher os taps dos transformadores de corrente: girar a chave para a posição “12 A”; com a chave nesta posição as leituras de corrente deverão ser multiplicadas
por 2.
e) Colocar a chave “Desliga medição C.A.” na posição 1, inibindo as leituras
durante a partida do motor.
f) Verificar que o comando de “desliga-liga dinamômetro” esteja desligado na
partida do motor.
g) Verificar também que o dial de “ajuste de carga” esteja zerado.
2) Ensaio a vazio:
a) Destravar o dinamômetro de maneira que o rotor possa girar livremente.
b) Aplicar gradativamente tensão até atingir 380 V através do Varivolt disponível na
mesa de comando (painel frontal). Utilizar chave “Congela Leitura” para efetuar as
medidas de potência trifásica (P), corrente ( I L ) e tensão entre fases ( VL ). A leitura
da potência trifásica deverá ser multiplicada por 8 devido ao fator multiplicativo de
2 para a corrente e de 4 para a tensão (veja passos “c” e “d” do item 1 acima).
c) Diminuir gradativamente a tensão, anotando seu valor bem como o da potência e
o da corrente. Interromper o ensaio a partir do ponto em que as correntes começam a
aumentar. Traçar a curva de P em função de VL e dela extrair as perdas
rotacionais, como foi feito em experiência anterior para o motor de indução de rotor
bobinado ANEL.
d) Zerar a tensão de entrada.
3) Se a proteção atuar, repetir item 1 acima..
4) Ensaio em carga
a) Aplicar gradativamente tensão de 380 V no estator através do Varivolt disponível
na mesa de comando (painel frontal). Utilizar chave “Congela Leitura” para efetuar
as medidas de potência trifásica (P), corrente ( I L ) e tensão entre fases ( VL ). Medir
também a velocidade ω r utilizando o tacômetro mostrado na Fig. 8, acionando-o
frontalmente ao disco de alumínio sobre o qual adesivos reflexivos estão colados.
b) Ligar o dinamômetro através da botoeira “Desliga-liga dinamômetro”.
c) Girar o dial de ajuste de carga até que a balança indique uma variação de 0.1 kg.
d) Repetir as medições de P , I L , VL e ω r .
e) Repetir os passos c e d variando a medição da balança de 0.1 em 0.1 kg até que a
corrente nominal do motor (1.78 A) seja atingida. Neste ponto compare a
velocidade do motor com a nominal do motor apresentada na sua placa.
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
f) Fazer ainda medidas em sobrecarga (0.1 kg adicional). Esta medição deverá ser
feita rapidamente, pois as proteções poderão atuar.
g) Desligar a bancada diminuindo a tensão.
Fig. 8. Tacômetro digital.
5) Se a proteção atuar, repetir o item 1.
6) Ensaio com rotor travado
a) Bloquear o dinamômetro de modo a travar o motor.
b) Aplicar tensão de modo a impor corrente nominal ao motor (1.78 A)
c) Medir P , VL e I L .
d) Desligar a bancada diminuindo a tensão de alimentação através do varivolt.
3. Calcular os parâmetros do circuito elétrico equivalente do motor a partir dos resultados
dos ensaios de funcionamento a vazio e com o rotor travado.
4. Traçar, em função da potência no eixo do motor Pm , as seguintes curvas:
a) Velocidade ω r [rpm]
Experiência II – Lab. de Conv. Eletrom. de Energia B – Prof. N.SADOWSKI – GRUCAD/EEL/CTC/UFSC – 2005/2
b) Fator de potência cos φ =
P
3VL I L
c) Corrente absorvida I L [A]
d) Torque | T |=| r × F |= (0.33m)(indicação da balanca em kg )(9.81m / s 2 ) [Nm],
onde 0.33 m é o valor do braço de alavanca do dinamômetro
P
e) Rendimento η =
Pm
f) Potência de entrada P [W]
A potência no eixo do motor Pm é calculada a partir do torque e da velocidade do motor.
Se a velocidade estiver expressa em rotações por minuto, a potência no eixo do motor ficará
Pm =
2π
| T | ωr
60
(4)
Referências
[1] R. H. Engelmann, W. H. Middendorf, Handbook of Electric Motors, Marcel Dekker,
New York, 1995, ISBN 0-8247-8915-6.
[2] Catálogo Geral Motores Elétricos: Linhas de Produtos, Carcterísticas, Especificação,
Instalação, Manutenção; Editado por WEG Motores, Mod. 050.01/032000.
[3] Norma NBR 7094 de 1996.
[4] J.P.A. Bastos, N.Sadowski, Electromagnetic Modeling by Finite Element Methods,
Marcel Dekker, New York, 2003, ISBN: 0-8247-4269-9.