Engenharia de Controle e Automação
Desenvolvimento de Veículos Autônomos em Escala.
Identificação de Parâmetros e Calibração dos Modelos dos Sistemas de
Propulsão, Frenagem e Direção
Aluno: Thais Barreto Joffe
Orientador: Mauro Speranza Neto
1- Introdução
Nessas últimas décadas, a indústria automobilística teve um enorme crescimento.
Atualmente, praticamente todas as famílias de classe média do Brasil possuem pelo menos um
carro e, além de servir de meio de transporte, os veículos também são usados para o
entretenimento em corridas e exposições para colecionadores, possuindo tecnologia de ponta e
trabalhando com velocidades e acelerações elevadas, dando ao ato de dirigir certo grau de
periculosidade. A fim de garantir que a atividade de dirigir um automóvel seja segura, engenheiros
mecânicos, elétricos e mecatrônicos se unem no estudo dos veículos terrestres, investigando os
efeitos de vários parâmetros nas condições limites de estabilidade veicular. Analisar o
comportamento de um veículo exige equipamentos de medição avançados, pois em testes práticos
reais não se pode ignorar atrito, resistência do ar, já que, por questões de segurança, deve-se levar
em conta tudo que puder atrapalhar a movimentação ideal do veículo a fim de encontrar um meio
de compensar tal obstáculo.
A análise física do comportamento de um veículo em movimento deve ser completa e
considerar todo tipo de comportamento anormal que os fatores externos podem provocar. Ao
analisar a atitude de um veículo em um determinado trecho de pista, podemos dizer sem dúvidas
se este trecho é retilíneo, curvilíneo ou se há relevo apenas por verificar variação de velocidade e
aceleração em função do tempo ou espaço.
Apesar de toda essa preocupação com detalhes, o estudo de atitude de um veículo não exige
que os testes sejam feitos unicamente em cima dele. Hoje em dia, alguns carros de brinquedo
comercializados são tão realistas, que é possível fazer testes comumente feitos em carros reais de
corrida e ainda assim esperar resultados similares. Carros autônomos ou radio controlados em
escala menor podem ser utilizados nesses testes, facilitando no manuseamento do objeto estudado.
1
Engenharia de Controle e Automação
Neste projeto, inicialmente será apresentado o desenvolvimento de um modelo dinâmico de um
veículo considerando as características suficientes para análise da trajetória. O veículo adotado pelo
laboratório de controle e automação neste trabalho (Figura 1), por exemplo, possui propulsão
elétrica, eletrônica de controle e monitoramento embarcada, sendo seu movimento determinado
através de transdutores. Mas dependendo do tipo de análise que deseja ser feita, há dezenas de
outros modelos que podem ser comprados em lojas de brinquedos ou internet e usados em um
estudo físico-mecânico profissional buscando que tais modelos possuam componentes capazes de
otimizar o estudo devido a sua maior compatibilidade com o tipo de análise que deseja ser feita
sobre este.
Figura 1: Veículo Elétrico em Escala.
2- Análise Gráfica
O desenvolvimento de modelos matemáticos baseados na atitude de veículos é fundamental
para uma melhor compreensão dos mecanismos característicos de seus movimentos. Mesmo que
trabalhando com diferentes carros, pistas e pilotos, o estudo de um deles servirá como base para
todos os demais, pois mesmo tendo traçados diferentes, a resposta do veículo a cada situação será
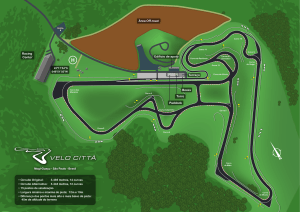
a mesma. Os gráficos exibidos a seguir nas Figuras 2 e 4 são referentes ao comportamento de um
carro de corrida durante o percurso de uma volta completa em duas pistas reais distintas (Figuras 3
e 5). Foram analisadas nos gráficos as velocidades, acelerações longitudinal e lateral, todas em
função do espaço.
2
Engenharia de Controle e Automação
Figura 2: Velocidade e Acelerações de um Fórmula 1 em Monza.
O gráfico da Figura 2 foi obtido a parir do comportamento do carro na pista de Monza, cujo
traçado se encontra na Figura 3.
Figura 3: Traçado da pista de Monza.
3
Engenharia de Controle e Automação
Figura 4: Velocidade e Acelerações de um Fórmula 1 em Barcelona.
Já este segundo gráfico (Figura 4) foi obtido para as mesmas variáveis na pista de Barcelona cujo
traçado se encontra na Figura 5.
Figura 5: Traçado da pista de Barcelona.
Está bem claro que os traçados são bem distintos, mas apesar disso, o comportamento dos
veículos nos trechos similares se aparenta muito. É possível notar que os picos de velocidade nos
trechos retilíneos da pista de Monza também aparecem na pista de Barcelona.
4
Engenharia de Controle e Automação
Analogamente, as acelerações têm o mesmo comportamento em traçados equivalentes.
Durante as curvas, por exemplo, são desenvolvidas forças laterais e há um deslizamento dos pneus
em relação à pista. Para evitar que o carro saia pela tangente, a aceleração lateral é aumentada e a
longitudinal diminuída. A única diferença entre as funções de movimento de Monza e Barcelona é
o momento e a freqüência com que cada tipo de comportamento aparece no gráfico, o que é o
esperado. Dessa forma vemos que estudando e conhecendo o comportamento padrão de um
veículo em vários tipos diferentes de traçado – reto, curvilíneo, elevado verticalmente - pode-se
estipular o comportamento de qualquer outro veículo terrestre quando este estiver passando por
trechos de pista semelhantes aos anteriormente analisados. Ao estudar o movimento de um veículo
em uma pista, podemos considerar que não há variações na altura desta, ou seja, a pista é tomada
como perfeitamente plana logo, negligencia-se a dinâmica vertical, só precisando levar em conta
as dinâmicas lateral e longitudinal. Quando o veículo freia, acelera, faz manobras, varia a tração
nas rodas ou esterça para variar o seu movimento, ele gera aceleração vertical e, se for analisada a
posição deste na pista em comparação aos gráficos obtidos de aceleração, podemos perceber esse
aumento ou diminuição referente ao comportamento do carro.
Os gráficos das Figuras 2 e 4 foram plotados separadamente como mostrado nas Figuras 6
e 7 para uma melhor visualização individual. Com o auxílio de dois programas de computador,
Dagra e Maple, os seguintes resultados foram obtidos para a pista de Monza.
F
Figura 6: Acelerações em Monza no Draga e Maple.
5
Engenharia de Controle e Automação
Figura 7: Velocidade em Monza no Maple.
Para chegar nesses resultados, com o uso do programa Dagra, aproximadamente três mil
pontos de cada uma dessas funções foram analisados, ou seja, associando a velocidade ou
aceleração lateral e longitudinal para cada um de seus respectivos pontos no espaço, e então os
gráficos das funções foram plotadas com o uso do Maple. Tal método é conhecido e estatística
como análise de regressão ou regressão de dados. Tal método consiste em estudar uma variável
dependente em relação à uma ou mais variáveis independentes, ou seja, ajuda a entender como o
valor de uma variável dependente é alterado quando o da variável independente muda, chegando a
uma função chamada de função de regressão, que foi a conseguida através do Maple.
O mesmo foi feito para a pista de Barcelona, cujo resultado está sendo ilustrado pelo
gráfico da velocidade na Figura 8. Novamente, apesar de os gráficos das velocidades nas
diferentes pistas serem diferentes, pode-se notar que vários pedaços de ambos são muito
parecidos, apenas não aparecem no mesmo momento ou freqüência. Isso reitera o fato de que não
importa o traçado da pista analisada, caso seja feito um estudo em cima de cada tipo de percurso,
este poderá ser adaptado para qualquer outra pista. O mesmo vale para o estudo das forças que
agem sobre o veículo ou o comportamento de seus componentes mecânicos como suspensões,
molas, freios ou pneus passando pelas diferentes etapas da corrida.
6
Engenharia de Controle e Automação
Figura 8: Velocidade em Barcelona no Maple.
3- Simulação
Para fazer as simulações computacionais, as pistas serão plotadas e testes serão feitos com
a finalidade de obter resultados similares aos vistos nos gráficos acima. Para plotar a pista de
Monza, por exemplo, é necessário saber o comprimento dos trechos retilíneos, os raios de cada
curva e todas as demais medidas presentes nos diversos seguimentos do percurso. Assim haverá
várias funções que serão plotadas juntas em um gráfico só para formar o traçado final. Um outro
jeito, embora dê menos informações sobre o percurso, é usar novamente o método de regressão de
dados, sendo ambos os eixos o espaço. Para encontrar as medidas da pista, foi encontrada sua foto
no Google Earth e no Google Maps, ambas fornecendo a escala, como mostrado nas Figuras 9 e
10.
Diferentemente da foto do autódromo achada através do Google Earth, o mapa de Google
Maps não se encontra inclinado, o que facilita bastante o trabalho de calcular cada medida dos
vários trechos de pista, já que não é necessário corrigir o fator angular presente devido á
inclinação da câmera que obteve a foto.
7
Engenharia de Controle e Automação
Figura 9: Foto da pista de Monza.
Figura 9: Mapa da pista de Monza.
8
Engenharia de Controle e Automação
Na foto da pista de Monza encontrada no Google Earth, pode-se perceber que a câmera não
estava posicionada ortogonalmente à superfície no momento da foto. Já no mapa da pista de Monza
encontrada no Google Maps os traçados paralelos não se encontrarão de forem prolongados como
ocorreria se fosse analisado a foto do Google Earth. A escala está presente no canto inferior à
esquerda do mapa, tornando medir cada pedaço da pista e multiplicar pela escala os únicos
trabalhos a serem realizados para se obter as medidas reais.
4- Conclusões
Com os resultados obtidos no desenrolar da primeira etapa do projeto, foi possível analisar o
comportamento de um veículo em uma pista com trechos retilíneos e curvilíneos com diferentes
raios de curvatura através de gráficos de velocidade e acelerações em funções do espaço.
Comparando ambas as pistas analisadas, a de Monza e a de Barcelona, pode-se ver que, embora os
traçados sejam bem distintos, os gráficos se assemelham muito quando o veículo está em trechos
similares. Os picos de velocidade são vistos em trechos retos da pista, caem ao se aproximar das
curvas e, durante estas, pode ser notada a variação crescente de aceleração lateral e decrescente de
aceleração longitudinal, ou vice e versa, necessária para que não haja sobresterçamento (tração
traseira, guinada elevada, velocidade angular do corpo do veículo é maior que a velocidade angular
do centro de massa e, por isso, ele sai de traseira) nem subesterçamento (tração dianteira, guinada
pequena, sai de frente, mais aderência na roda de trás do que na da frente) do veículo.
Dando-se continuidade ao projeto, testes serão feitos tanto com o veículo real em escala
quanto com simulações computacionais e dessa forma haverá mais fontes de resultados para
reiterar os já obtidos. Esse projeto abrangerá conhecimentos de Física, Cálculo, Informática e
Mecânica de Automóveis, ou seja, abordará várias áreas de conhecimento dentro da engenharia e
serão aplicados importantes conceitos fundamentais para um trabalho de engenharia.
9