Faculdade de Engenharia Elétrica
Universidade de Brasília
Laboratório Controle Dinâmico
Marco A. Egito
Kit Levitação Magnética
Este kit foi desenvolvido a partir de vários trabalhos de
projeto final no departamento de Engenharia Elétrica da
UnB. O objetivo básico é permitir a levitação estável de um
rotor através da interação entre campos magnéticos gerados
no rotor e nas partes fixas do kit. A maior parte (quase a
totalidade) da força de sustentação do rotor é consequência
da interação entre os 3 imãs permanentes; imã de base, imã
do rotor e imã superior. Entretanto, como é previsto pelo
teorema de Earnshaw[1] de 1842, é impossível levitar
elétrica ou magneticamente um objeto de forma estável,
apenas com cargas elétricas ou imãs permanentes fixos.
Se colocarmos a haste do rotor dentro do diâmetro do imã de
base com as faces brancas voltadas uma para a outra,
percebemos uma força de repulsão considerável, facilmente
capaz de superar o peso do rotor. As faces brancas
correspondem ao polo norte dos imãs, por isto a repulsão
observada. Se tentarmos colocar o rotor bem no centro do
imã da base, verificamos que esta posição é instável e,
quando solto, o rotor rapidamente se desloca até tocar numa
das bordas do diâmetro interno. A colocação de um 3º imã
sobre o rotor com a face branca voltada para baixo (portanto
atraindo o rotor) cria uma 2ª força de sustentação, que deve
ser menor do que a força de repulsão do imã da base. A
introdução da 2ª força coloca o sistema mais próximo da
estabilidade, porém o teorema de Earnshaw continua válido
e o sistema ainda é instável.
Podemos contornar os pressupostos básicos de Earnshaw e
levitar o objeto utilizando materiais diamagnéticos (que
tendem a repelir campos magnéticos), efeitos dinâmicos ou
eletroímãs em um sistema de controle de malha fechada, o
que é feito no kit.
Fig1: Foto Kit
Funcionamento
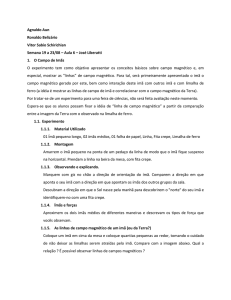
A figura a seguir mostra, de forma esquemática, um corte lateral do sistema mostrando os 2
eletroímãs e fotodetector compondo o sistema de malha fechada que tem a função de
estabilizar o equilíbrio do rotor. Na figura apenas os deslocamentos nos eixos x e z estão
representados. O eixo y, normal ao plano, é idêntico ao eixo x. Conforme o rotor de desloca no
sentido positivo ou negativo do eixo x, a borda do imã interfere no feixe de luz, aumentando ou
diminuindo o fluxo de luz sobre Ft. O fototransistor Ft é um dispositivo que permite a
passagem de corrente elétrica proporcionalmente à quantidade de luz que incide sobre ele em
uma determinada faixa, no caso, luz infravermelha.
Fig2: Sensor de posição
Imã
superior
Ft
luz
N N N N
Imã
S S rotor
N N N N
Be
N N N N
Eixo
Z
SSSS
N N N N
Eixo
X
led
N N N N N
Bd
N N N N N
Imã
base
Sensor de posição
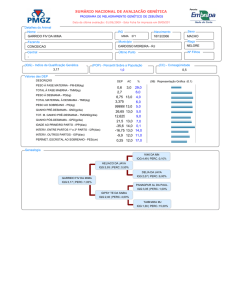
Se Ft não permite passagem de corrente (está na
sombra) a tensão na entrada + do operacional é dada
pelo divisor resistivo entre R1 e R2, no caso próxima Fig3: Circuito sensor de posição
de 3.5V. Se Ft permite passagem de corrente máxima
(está totalmente exposto à luz) a tensão na entrada + do
+5V
R5
R4
operacional cai para algo próximo a 1.5V. A tensão na
3.3k
3.3k
saída do operacional será de +2V no 1º caso e -2V no
+12V
R1
2º caso. O circuito completo do sensor, inclui 1 resistor
de proteção do fototransistor
(R3) além do
-12V
amplificador operacional que tem a função de deslocar
3.3k
a tensão de v para variação em torno de zero, além de
R3
proporcionar um ganho de +2. Os valores dos resistores
R2
Ft
R1, R2 e trimpot indicados, são obtidos caso a caso
conforme a corrente máxima que Ft permite passar
quando exposto ao máximo de luz. Valores típicos são
39K, 82K e 10K, respectivamente e o trimpot deve ser
ajustado para que o valor médio do sinal Ss seja 0,00
V.
Ss
Atuador
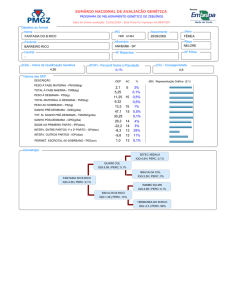
As bobinas Be e Bd correspondem ao atuador do sistema e estão ligadas e em série com as
polaridades invertidas. Desta forma, uma corrente nas bobinas fará com que uma delas “puxe” e a
outra “empurre” o rotor, isto é, as bobinas produzem uma força no sentido positivo ou negativo do
eixo x, conforme a corrente através delas seja positiva ou negativa, como mostra o esquema abaixo.
Fig4: Atuador
O circuito que fornece a corrente das bobinas, é baseado
em um único amplificador operacional
numa
configuração não-inversora. A Entrada Ep vem do
circuito do compensador e a saída é ligada diretamente
nas bobinas. O resistor Rp é uma proteção para o
amplificador operacional, uma vez que a entrada Ep é
acessível na placa do compensador. Também o sinal Ib
é acessível e será utilizado para mostrar a corrente
instantânea através das bobinas. Os transistores
bipolares NPN e PNP,são de uso geral e servem para
amplificar a corrente na saída de U3. Os leds LDe e
LDd são uma indicação para o usuário sobre a força
produzida pelo atuador, isto é, para a direita, para a
esquerda ou próximo do equilíbrio se ambos estiverem
apagados.
Fig5: Circuito do atuador
+12V
+12V
Ep
10k
Rp
NPN
U3
RLd
1k
PNP
-12V
-12V
Bd
Be
Ib
LDe
LDd
Rpot
1Ω
Fig6: Compensador
padrão
Compensador
O circuito de compensação fica imediatamente antes do circuito do
atuador e tem a função de melhorar a resposta do sistema completo.
Este circuito é implementado em uma placa menor ligada à placa
principal por um cabo multivias. Na placa do compensador pode-se
escolher entre o compensador padrão, mostrado ao lado, ou outro
projetado pelo usuário que pode ser implementado com ou sem a
utilização dos 2 amplificadores operacionais disponíveis através da
placa.
Rca
47k
Sm
Ep
Cc
1uF
Rba
12k
Somador e Amplificador
Este circuito fecha a malha de realimentação, onde um somador
e um amplificador de ganho ajustável pelo usuário são
incluídos na placa do compensador. A soma de sinais é feita
pelos resistores Rref e Rss onde o valor de Rref é maior
para compatibilizar o nível de sinal de Ss com o sinal Ref
(maior) que vem do gerador de funções. O ganho pode ser
alterado pelo usuário com a alteração dos resistores Rg e Rr.
Fig7: Somador e amplificador
Rg
Rr
+12V
Rref
4.7k
Ref
Ss
Bibliografia
[1] Samuel Earnshaw, 1842 – http://en.wikipedia.org/wiki/Earnshaw%27s_Theorem
100Ω
Rss
Sm
-12V
Procedimento de montagem do kit – modo levitador
1- Coloque o imã de base (o maior) na pequena prateleira abaixo da mesa da base com a face branca
voltada para cima. Certifique-se de que fique bem centralizado em relação à abertura central da mesa.
2- Coloque o conjunto bobinas-sensores sobre a mesa com a parte menor para cima. Certifique-se de
que fique bem centralizado em relação aos 4 parafusos da mesa. Os fios do conjunto devem ficar
sobre a perna esquerda da base. Este é o ponto de origem dos eixos x e y de referência.
3- Ajuste a posição do imã de base olhando verticalmente para baixo por cima do conjunto bobinassensores. Deve-se buscar um bom alinhamento vertical entre: base, imã de base, conjunto bobinassensores.
4- Coloque o rotor com a haste para baixo por dentro do conjunto bobinas-sensores e do imã de base
logo abaixo deste. Cuidado com o imã do rotor que entra com pequena folga dentro do conjunto
bobinas-sensores.
5- Coloque a placa do imã superior sobre o conjunto bobinas-sensores com os 4 parafusos com as
cabeças para baixo.
6- Coloque o imã superior sobre a placa com a face branca para baixo.
7- Verifique se o imã do rotor está a uma boa altura (centralizado) em relação às 2 placas do conjunto
bobinas-sensores, olhando horizontalmente. Para isto segure a haste do rotor tentando colocá-lo
manualmente na posição de levitação. Se estiver muito baixo ou muito alto, ajuste os 4 parafusos da
placa do imã superior para corrigir o problema.
8- Ligue as placas eletrônicas na ordem:
– conecte a placa principal na placa dos compensadores (o cabo multivias fica direcionado para
a borda mais próxima)
– conecte o o cabo multivias que vem do conjunto bobinas-sensores à placa principal (o cabo
fica direcionado para a borda mais próxima).
– conecte o o cabo da fonte de alimentação (3 pinos) na placa principal(“letrinhas” para cima).
A placa principal deve ficar “em pé” com os dissipadores de calor para baixo.
– NÃO ligue ainda o cabo das bobinas!
9- Ligue a fonte de alimentação. Se tudo estiver certo, 2 dos 4 leds na parte inferior da placa principal
acenderão. Estes leds estão ligados na saída dos drivers de corrente dos 2 canais e se os
compensadores estiverem ligados, os leds informarão o que os sensores estão captando. Segurando a
haste do rotor e colocando-o manualmente na posição de levitação, deve-se verificar se os leds se
alternam para pequenos deslocamentos laterais nos eixos x e y.
10- Se o item 9 acusou um funcionamento normal, pode-se ligar o cabo das bobinas na tomada logo
abaixo da tomada da fonte (4 pinos com as “janelinhas” para cima).
11- Se tudo estiver certo o rotor começará a levitar, mas provavelmente é necessário corrigir o
alinhamento dos imãs de base e superior. Olhando por baixo da prateleira do imã de base, é possível
ver se a haste do rotor está bem centralizada em relação ao imã de base. Corrija eventuais problemas
deslocando ligeiramente o imã de base com a ponta do dedo até conseguir uma boa centralização.
12- Se o rotor estiver levitando estático (parado) os 4 leds da placa principal deverão ficar apagados.
Se isto não ocorrer desloque ligeiramente o imã superior até obter este estado.
Procedimento de montagem do kit – modo Estável em malha aberta
1- Remova o imã de base (o maior) da pequena prateleira abaixo da mesa da base .
2- Coloque o conjunto bobinas-sensores sobre a mesa com a parte menor para cima. Certifique-se de
que fique bem centralizado em relação aos 4 parafusos da mesa. Os fios do conjunto devem ficar
sobre a perna esquerda da base. Este é o ponto de origem dos eixos x e y de referência.
3- Coloque o rotor com a haste para baixo por dentro do conjunto bobinas-sensores e do imã de base
logo abaixo deste. Cuidado com o imã do rotor que entra com pequena folga dentro do conjunto
bobinas-sensores. A ponta inferior do rotor deve ficar apoiada sobre um azulejo de cerâmica
colocado sobre a parte inferior da base.
4- Coloque a placa do imã superior sobre o conjunto bobinas-sensores com os 4 parafusos com as
cabeças para baixo.
5- Coloque o imã superior sobre a placa com a face branca para baixo.
6- Verifique se o imã do rotor está a uma boa altura (centralizado) em relação às 2 placas do conjunto
bobinas-sensores, olhando horizontalmente. Se necessário coloque um apoio adicional sob o azulejo.
7- Neste ponto o rotor deve ficar posicionado verticalmente sem tocar nas laterais devido à atração do
imã superior. Ajuste a posição do imã superior se isto não ocorrer, pode ser necessário abaixar ou
levantar o imã superior ajustando os parafusos da base deste.
8- Ligue as placas eletrônicas na ordem:
– conecte a placa principal na placa dos compensadores (o cabo multivias fica direcionado para
a borda mais próxima)
– conecte o o cabo multivias que vem do conjunto bobinas-sensores à placa principal (o cabo
fica direcionado para a borda mais próxima).
– conecte o o cabo da fonte de alimentação (3 pinos) na placa principal(“letrinhas” para cima).
A placa principal deve ficar “em pé” com os dissipadores de calor para baixo.
– NÃO ligue ainda o cabo das bobinas!
9- Ligue a fonte de alimentação. Se tudo estiver certo, 2 dos 4 leds na parte inferior da placa principal
acenderão. Estes leds estão ligados na saída dos drivers de corrente dos 2 canais e se os
compensadores estiverem ligados, os leds informarão o que os sensores estão captando.
10- Ajuste com cuidado a posição lateral do imã superior para que os leds fiquem todos apagados ou
alternem entre 2 opostos conforme o rotor oscila lateralmente nos eixos x e y.
11- Se o item 10 acusou um funcionamento normal, pode-se ligar o cabo das bobinas na tomada logo
abaixo da tomada da fonte (4 pinos com as “janelinhas” para cima).
12- Se tudo estiver certo o rotor estabilizará rapidamente na posição central com os 4 leds apagados..
Se isto não ocorrer desloque ligeiramente o imã superior até obter este estado.