MECÂNICA I – CINEMÁTICA ESCALAR
I- INTRODUÇÃO À FÍSICA
v (km/h)
1) Grandeza Física - algo suscetível de ser comparado e
medido. As grandezas físicas são classificadas em:
a) Grandeza Escalar: fica perfeitamente caracterizada
pelo valor numérico e pela unidade de medida. Exemplos:
tempo, massa, volume temperatura, etc.
b) Grandeza Vetorial: necessita, para ser perfeitamente
caracterizada, das idéias direção, de sentido, de valor
numérico e de unidade de medida. Exemplos:
deslocamento, velocidade, aceleração, força, impulso,
quantidade de movimento.
2) Padrões Fundamentais da Mecânica no SI
Grandeza
Padrões
Comprimento
m
Massa
kg
Tempo
s
3) Notação Científica (potência de dez)
É uma maneira simplificada de se escrever um
número como um produto de dois fatores, sendo o primeiro
fator um número entre um (1) e dez (10) e o segundo uma
potência inteira de dez.
n
N x 10 , com “n” inteiro, 1 N 10
Exemplos:
- 6
a) 0,00000453 m = 4,53 . 10
m
+8
b) 703000000 cm= 7,03 . 10 cm
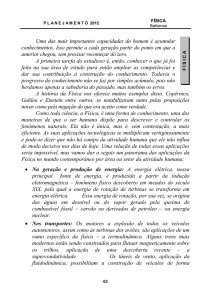
a) Grandezas Diretamente Proporcionais: Duas
grandezas são diretamente proporcionais, quando a razão
(quociente) entre um valor qualquer de uma delas e o valor
correspondente da outra é constante.
O gráfico
característico de duas grandezas diretas é uma reta que
passa pela origem. Exemplo: Massa e volume.
7,5
1,0
15,0
2,0
22,5
3,0
30,0
4,0
Hipérbole
100
0
II-
CONCEITOS
CINEMÁTICA
V (cm³)
b) Grandezas Inversamente Proporcionais: Duas
grandezas são inversamente proporcionais quando o
produto entre os seus valores correspondentes é
constante. O gráfico característico de duas grandezas
inversas é uma hipérbole. Exemplo: Velocidade e tempo.
100
2
4
t (h)
FUNDAMENTAIS
DA
Ponto Material – Corpo Extenso – Movimento –
Repouso – Referencial – Trajetória – Espaço ou
Posição(S) - Deslocamento Escalar (ΔS) e Distância
Percorrida(d).
III) VELOCIDADE– é a grandeza que mede a variação
da posição com o tempo em relação a um referencial.
VELOCIDADE ESCALAR MÉDIA (Vm): define-se como
sendo a razão entre o deslocamento escalar e o intervalo
de tempo gasto pelo móvel.
S
t
Vm
ou
S S0
t t0
m/s (SI)
Outras unidades de velocidade: km/h , cm/s, etc
Conversões: m/s ↔ km/h: 1 m/s = 3,6 km/h
Velocidade Escalar Instantânea (V): é a velocidade que
o móvel possui em um determinado instante ou
S
t 0 t
v lim
(limite da velocidade média quando o
intervalo de tempo tende a zero).
ACELERAÇÃO ESCALAR MÉDIA (am)– é a razão entre a
variação de velocidade ( ΔV ) siofrida pelo móvel e o
intervalo de tempo gasto (Δt).
am
V V V0
t
t t0
200
1
400
0,5
m/s² (SI)
Aceleração Escalar Instantânea ( a ): valor da aceleraçao
num instante t ou
50
4
2
varação da velocidade sofrida pelo móvel e o intervalo de
tempo gasto.
k = fator ou coeficiente de
proporcionalidade.
v (km/h)
t ( h)
1
IV) ACELERAÇÃO - é a grandeza que relaciona a
m (g)
m
k 7,5g / cm3
V
200
50
Vm
4) Proporcionalidades de Grandezas Físicas
Massa (g)
Volume ( cm³)
Temos:
50 x 4 =
100 x 2 =
200 x 1 =
400 x 0,5 =
k = 200 km
a lim
t 0
V
( limite da aceleração
t
média quando o intervalo de tempo tende a zero).
V) MOVIMENTO UNIFORME (MU)
É todo movimento no qual a velocidade escalar é
constante (aceleração nula). O móvel percorre distâncias
iguais em intervalos de tempo iguais. V = Vm
d) EXPRESSÕES DO MUV
a) Tipos de MU:
MRU – Movimento Retilíneo Uniforme
MCU – Movimento Circular Uniforme
b) Função Horária do MU:
S = S0 + v.t
(1º grau)
Sinal da velocidade:
Se v > 0: movimento progressivo ⇨ a partícula se move
no sentido dos espaços crescentes.
Se v < 0: movimento retrógrado ou regressivo ⇨ a
partícula se move no sentido dos espaços decrescentes.
F. Horária da velocidade: V = V0 + a.t
(1° grau)
F. Horária dos espaços: S S 0 V0 .t
a.t 2
(2º grau)
2
V 2 V02 2.a.S
V V
S
Velocidade média: Vm
ou Vm 0
t
2
Equação de Torricelli:
e) GRÁFICOS DO MUV:
(1º) Gráfico da Velocidade: v = f(t) reta inclinada
v
c) GRÁFICOS DO MU
(a>0)
1º) Gráficos dos Espaços: S = f(t) Reta inclinada
M. Progressivo
(V>0)
S
v0
S0
t
V=0
(a< 0)
t
Propriedades:
M. Retrógrado
(V< 0)
i)
2 º) Gráfico da Velocidade: V = f(t) Reta paralela ao
eixo dos tempos
a
N
tgθ
ii)
S
v
S > 0
+v
a
A
t1
A
t
-a
V < 0
t2
-v
t2
S < 0
Propriedade do gráfico: a =f(t):
N
Área( A) V
(3º) Gráfico dos espaços: S = f(t) Parábola
Propriedades:
i) Gráfico S = f(t): V
t1
t
A
A
t
t
a<0
V > 0
+a
v<0
área( A)
(2º) Gráfico da Aceleração: a = f(t) Reta paralela
a
v
N
N
a > 0: concavidade voltada para cima;
a < 0: concavidade voltada para baixo.
V = 0: nos pontos de máximo e de mínimo (nos vértices)
tgθ
ii) Gráfico v = f(t): área( A)
N
S
a<0
a >0
v=0
VI– MOVIMENTO UNIFORMEMENTE
VARIADO
(MUV)
a) Características:
Aceleração escalar constante (a CTE ≠ 0),
a = am
A velocidade tem variações proporcionais
aos intervalos de tempos.
b) Tipos de MUV
* MRUV: Movimento Retilíneo Uniformemente
Variado;
*MCUV: Movimento Circular Uniformemente Variado.
c) Classsificação quanto à velocidade e aceleração
Acelerado: quando ΙVΙ aumenta no decorrer do tempo; os
sinais de “a” e “v” são iguais ( a > 0 e v > 0 ou a < 0 e v < 0).
Retardado: quando Ι V Ι diminui; os sinais de “a” e “v” são
diferente ( a > 0 e v < 0 ou a < 0 e v > 0).
Retrógrado
Retardado
v=0
=0
Progressivo
Progressivo
Retardado
Retrógrado t
Acelerado
Acelerado
VII - MOVIMENTOS VERTICAIS NO VÁCUO
Queda Livre (v = 0) e Lançamento Vertical (v 0)
Todos os corpos que se movimentam nas proximidades da
superfície terrestre ou de outro planeta, na ausência do
ar, adquirem uma mesma aceleração (praticamente
constante), denominada aceleração da gravidade (g),
independentemente de suas massas, formas e dimensões;
tendo g direção vertical, apontando para o centro da
Terra (ou de outro planeta).
São casos particulares de MUV, onde na ausência do ar
ou no vácuo, teremos:
Vetores iguais ou Eqüipolentes – são vetores que
possuem a mesma direção, o mesmo sentido e o
mesmo módulo.
a) trajetória retilínea e vertical;
b) aceleração da gravidade: g = 9,8 m/s² (valor normal a
45 ° de latitude e ao nível do mar). Na resolução de
exercícios usaremos g = 10 m/s², para simplificação de
cálculos.
Assim sendo, utilizamos as mesmas funções do MUV,
bastando trocar “a” por “+ g” se orientarmos
positivamente para baixo; e “a” por “- g” se orientarmos
positivamente para cima.
(1)
V = V0 + g.t
S S 0 V0 . t
(2)
Vetores opostos ou simétricos – são vetores que
possuem a mesma direção e o mesmo módulo, porém
sentidos contrários.
2
2
g.t 2
2
A) ADIÇÃO VETORIAL
Vetor soma S ou vetor resultante R é o vetor
equivalente a dois ou mais vetores.
(3) V = V0 + 2.g∆S
g>0
+
g<0
V0
V0
+
Trajetória orientada
para cima
1- Método do Paralelogramo
Deslocam-se os vetores dados paralelamente e
une-se a origem de um com a origem do outro vetor;
com linhas auxiliares, traça-se o paralelogramo. O vetor
Trajetória orientada
para baixo
soma S é a diagonal do paralelogramo formado (ver
figura). Sejam V1 e V2 .
Observações:
1ª) Durante a SUBIDA, o movimento é uniformemente
RETARDADO, pois o módulo da velocidade diminui;
durante a DESCIDA, o movimento é uniformemente
ACELERADO, visto que o módulo da velocidade aumenta.
V1
Onde: S =
2ª) As velocidades de um corpo, num ponto da trajetória,
na subida e na descida são iguais em módulo.
VETOR - é um ente puramente matemático, sem qualquer
significado Físico, caracterizado por módulo, direção e
sentido; representam na Física as grandezas vetoriais e
são representados graficamente por um segmento de reta
orientado.
r
Reta suporte.
B
V
S
V1 + V2 (soma vetorial)
S V12 V22 2.V1 .V2 . cos θ (Lei dos Cossenos)
2- Método do Polígono ou da Linha Poligonal
Deslocam-se paralelamente os vetores dados,
das suas posições originais, unindo a origem de um com
a extremidade do outro vetor até o último vetor; o vetor
soma ( S ), obtém-se ligando a origem do primeiro vetor
com a extremidade do último vetor deslocado. Sejam a
adição dos vetores a , b , c e d , abaixo.
A = origem
B = extremidade
u
V AB
(direção)
A
Cálculo do módulo do vetor soma S :
3ª) O tempo de subida e o tempo de descida (queda) são
iguais para o mesmo ponto da trajetória.
VIII - NOÇÕES DE VETORES
V2
u = unidade
Eixo de referência
CARACTERÍSTICAS DO VETOR:
Módulo:
intensidade,
valor
numérico;
representado pelo comprimento do segmento de reta.
Usamos a notação: V ou V.
Direção: ângulo que o vetor forma com um eixo de
referência; é determinada pela reta suporte (reta que contém o
vetor). Podemos ter como exemplos: vertical, horizontal,
esquerda - direita, norte-sul, etc. Vetores paralelos têm a
mesma direção.
Sentido: é a orientação que o vetor possui sobre seu
suporte. Exemplos: Da esquerda para direita, de baixo para
cima, do norte para o sul, etc.
3-
Casos Particulares da Adição Vetorial:
Sa b
1°) a e b têm a mesma direção e o mesmo sentido:
a
b
S = a + b (módulo)
S
(soma algébrica)
2°) a e b têm a mesma direção e sentidos contrários:
a
S
b
Define-se como sendo
o quociente entre o vetor
deslocamento S d e o intervalo de tempo t em que o
S = b - a (módulo)
(soma algébrica)
movimento se realiza.
Consideremos um móvel em uma trajetória qualquer.
Temos:
3°) a e b têm direções perpendiculares (ortogonais)
d
A
b
t1
2
S
a
S a b
2
Vm
V1
(módulo)
D V12 V22 2.V1 .V2 . cos θ
Sendo
d = vetor deslocamento - vetor que tem origem na
posição inicial e extremidade na posição final do
móvel.
Notas:
1ª) O vetor velocidade média Vm tem a mesma direção e o
mesmo sentido do vetor deslocamento d .
2ª) Em cinemática escalar Vm
Então: Vm Vm .
velocidade) V : é um vetor de direção sempre tangente à
trajetória, no mesmo sentido do movimento é módulo igual
ao da velocidade escalar instantânea ( Vm = Vm).
V2
V1
Módulo: P n . V ou P = n.V.
V
V2
V3
Trajetória retilínea. V ,
tem direção constante
V4
V3
Sentido: mesmo de V , se n > 0,
oposto de V , se n < 0.
- 3V
2V
V1
Direção: a mesma do vetor V .
S
. Como d S .
t
B) Velocidade vetorial instantânea (vetor
C) MULTIPLICAÇÃO DE UM NÚMERO REAL
(ESCALAR) POR UM VETOR
Ao multiplicarmos um número real n por um vetor V ,
obteremos outro vetor P n.V , com as seguintes
características:
B
t2
d
Vm
t
B) SUBTRAÇÃO VETORIAL
A diferença entre dois vetores V1 e V2 ( V2 - V1 ) obtém-se,
adicionando-se vetorialmente o vetor V2 com o oposto
(simétrico) de V1 . Temos:
D V2 V1 V2 (V1 )
V2
V1
V
1
D
V2
Módulo do vetor diferença D :
V2
Trajetória curvilínea, V
tem direção variável
C) Aceleração Vetorial Instantânea ( a ) é a
aceleração de um móvel num determinado instante t;
D) DECOMPOSIÇÃO ORTOGONAL DE UM
VETOR V
Projetando perpendicularmente em Ox e Oy, temos:
y
V
Vy
Sendo: V = Vx + Vy ,
Projeções: V x e Vy
j
i
x
Vx
Módulos:
Vx = V. cos
Vy = V. sen
indica a variação do vetor velocidade ( V ) em módulo e
em direção. Tem duas componentes:
ACELERAÇÃO TANGENCIAL ( a t ): indica a
variação apenas do módulo do vetor velocidade V ,
tangente à trajetória e módulo igual ao da aceleração
movimento for acelerado; oposto ao de
movimento for retardado.
a
A expressão cartesiana de V , em função dos vetores
unitários i e j , chamados versores, é:
V Vx i Vy j Sendo: Vx Vx e Vy Vy
2ª Parte - CINEMÁTICA VETORIAL
A) Vetor velocidade média ( Vm ) ou velocidade
vetorial média.
escalar: a t a (escalar). Sentido: mesmo de V , se o
a
V
M. Acelerado
V
M. Retardado
Nota: a t só existe em movimentos variados
No M.U, at 0 , pois V não varia.
V , se o
ACELERAÇÃO
CENTRÍPETA
( a CP ):
é
perpendicular à trajetória e indica a variação apenas da
direção do vetor velocidade V . Tem sentido para o centro
da trajetória e módulo dado por:
V
a CP
a CP
R
V2
R
a = alcance
C
►Componentes da velocidade inicial:
V0x = V0 e V0y = 0
►Funções Horárias:
Sendo v = velocidade
R = raio da trajetória
Segundo x: MU →
x = V0.t
ACELERAÇÃO RESULTANTE ( a a CP a t )
Segundo y: MUV
Módulo:
2
a a CP
a 2t
de
Trajetórias
Trajetórias Retilíneas aCP 0 .
Curvas
1
y gt 2 e Vy = g.t
2
2°) Lançamento Oblíquo no vácuo
Nota: A aceleração centrípeta ( aCP ) só existe em
movimentos
→
É aquele em que a velocidade inicial do
movimento forma com a horizontal um ângulo , chamado
ângulo de tiro. É, também, uma composição de um MUV
na direção vertical com MU na direção horizontal.
( aCP 0 );
em
I - COMPOSIÇÃO DE MOVIMENTOS
Movimentos compostos são aqueles resultantes da
composição de dois ou mais movimentos. Como o
movimento de um barco na correnteza, de um avião no ar,
de um corpo lançado obliquamente no ar, etc.
Sejam dois sistemas de referências (R e r) e um ponto P.
Movimento
Relativo
Movimento de
Arrastamento
►Componentes da velocidade inicial:
VB/A
BARCO (B)
ÁGUA (A)
(P)
V0x = V0.cos
V0y = V0 . sen
VA/T
(r)
TERRA(T)
(R)
VB/T
► FUNÇÕES HORÁRIAS:
Segundo x (MRU):
x = x0 + v0x.t
v0x=cte 0
Movimento Resultante
TEMOS:
VRES = VREL + VARR
(B/T)
(B/A)
(A/T)
1
y y 0 v 0 y .t g.t 2
2
Segundo y (MRUV):
O Princípio da Simultaneidade ou Independência de
GALILEU pode ser enunciado da seguinte forma:
“Quando um corpo se encontra sob a ação
simultânea de vários movimentos, cada um deles se
processa como se os demais não existissem; e no
mesmo intervalo de tempo”.
II - MOVIMENTOS NÃO VERTICAIS NO VÁCUO
1°) Lançamento horizontal
Movimento resultante da composição de dois movimentos
retilíneos e ortogonais:
Vy2 V02y 2.g.y
Vy = V0y – g.t
► Em qualquer instante de tempo, para os dois casos
L. horizontal e L. oblíquo), teremos:
V V0 x Vy
em módulo
V 2 V02x Vy2
Notas:
1ª) O módulo da velocidade vertical Vy diminui durante a
subida e aumenta na descida.
2ª) No ponto de altura máxima (hmáx) o módulo da
velocidade no movimento vertical é zero (Vy = 0).
3ª) Pode-se demonstrar que a trajetória é parabólica e
que para uma dada velocidade inicial o alcance
máximo é atingido com ângulo de tiro de 45°.
Alcance máximo → A máx
V02
ou Amáx = 4.H
g
4°) Quando o ângulo de lançamento (de tiro) não for 45°;
existirão duas opções de ângulo para se obter o mesmo
alcance.Tais ângulos são complementares, isto é 1 + 2 =
90°.
RELAÇÕES ENTRE GRANDEZAS ANGULARES E
GRANDEZAS LINEARES
Grandeza linear = Grandeza angular x Raio
S = .R
V = .R
a = α.R
Nota:
Estas relações são válidas apenas quando a grandeza
angular for expressa em radiano, caso contrário devemos
primeiro convertê-las para depois utilizá-las.
D) MOVIMENTO CIRCULAR UNIFORME (MCU)
III
- CINEMÁTICA
CIRCULARES
DE
MOVIMENTOS
Movimento circular é aquele cuja trajetória é uma
circunferência A posição do móvel também pode ser
determinada por um ângulo central (fi, espaço angular –
grandeza angular) em lugar de espaço S (espaço linear).
Neste movimento, temos as grandezas:
Grandezas Angulares
Grandezas lineares
Espaço angular
()
Velocidade angular ( )
Aceleração angular ( α )
Onde:
R = raio da circunferência
V1 V2 V3 cte
Espaço linear
(S)
Velocidade linear ( V )
Aceleração linear ( a )
A) Espaço ou posição angular (): é dado pela medida
do ângulo central em relação a um referencial prefixado
(O).
φ
Arco S
Raio R
Unid () = radiano (rad)
= 1 rad, se R = S
1 volta → = 2 rad
360° = 2 rad
B) Velocidade angular média (m): é o quociente entre o
ângulo descrito ( Δ φ) e o tempo gasto em descrevêlo.
m
É aquele cuja trajetória é uma circunferência e o módulo
de sua velocidade vetorial é constante e diferente de zero,
bem como a velocidade angular (); repetem-se
periodicamente os estados do movimento (posição,
velocidade).
Como exemplo, temos: O movimento dos ponteiros de um
relógio, de um disco em um toca-disco, etc.
2 1
t
t 2 t1
rad/s ( SI )
E) MOVIMENTOS PERIÓDICOS
São aqueles no qual qualquer posição é repetida
identicamente em intervalos de tempos iguais. Temos:
Período (T) é o tempo gasto numa volta completa
(ciclo, rotação ou oscilação). Unidades: Ano, mês, dia,
minuto, segundo (s, no SI), etc.
Freqüência (f): é o número de voltas ciclos,
rotações ou oscilações) efetuadas por unidade de tempo.
A freqüência é o inverso do período, e vice-versa.
f
voltas n
tempo t
C) Aceleração angular média ( α m ): é o quociente entre
a variação da velocidade angular ( Δω ) e o intervalo de
tempo ( Δt ) gasto nesta variação.
ω ω 2 ω 1
αm
t
t 2 t1
rad/s² ( SI )
f
1
T
ou
T
1
f
Unidade(f) = voltas/s = ciclos/s = rps = 1/s = Hz, rpm.
Hz = Hertz (SI)
rps = rotações pos segundo
rpm = rotações por minuto
Conversões: Quilohertz: 1 kHz = 1000 Hz
6
Megahertz: 1 MHz= 10 Hz
Sendo: Δ = deslocamento angular (rad),
Δ φ = 1 - 2 ( Δ φ, delta fi)
Δt = intervalo de tempo (s).
Nota: Para um intervalo de tempo ( Δt ) muito pequeno
(um instante t), a velocidade angular média (m) é
denominada velocidade angular instantânea e é
indicada por .
→
60
rpm
Hz
x 60
F) RELAÇÕES E FUNÇÕES DO MCU
Relações:
ω
2π
2πf
T
V= .R
a CP
f
V2
ω 2 .R
R
1
T
Angular: = + .t
Funções Horárias: Linear: S = S 0+ V.t
0
G)
TRANSMISSÃO
COMBINADOS
DE
MOVIMENTOS
Há muitos movimentos circulares que se acoplam
através de polias, correias e engrenagens.
1) Acoplamentos por correias ou por engrenagens
(eixos diferentes: pontos com a mesma velocidade
escalar V.
2) Acoplamentos com o mesmo eixo: pontos descrevem
o mesmo ângulo e, portanto, a mesma velocidade angular
.
VB
VB
VA
A
B
VA
A = B
VA = VB
H) MOVIMENTO CIRCULAR UNIFORMEMENTE
VARIADO (MCUV)
É aquele em que a trajetória é circular e a aceleração
angular é constante ( ω = cte ) e não nula. Sendo um
movimento uniformemente variado, valem as funções do
MRUV.
FUNÇÕES HORÁRIAS ANGULARES
Fazendo a correspondência: S , V e a
α , nas expressões do MRUV, obtém-se as expressões
do MCUV. Tem-se:
(1ª) F. H. do Espaço Angular:
0 0 .t
1 2
.t
2
(2ª) F. H. da Velocidade Angular: = 0 + α t
(3ª) Equação de Torricelli:
= 0 + 2 α . Δ φ
2
2