CAP. I – ERROS EM CÁLCULO NUMÉRICO
0. Introdução
Por método numérico entende-se um método para calcular a solução de um
problema realizando apenas uma sequência finita de operações aritméticas.
A obtenção de uma solução numérica para um problema físico através da
aplicação de métodos numéricos nem sempre nos dá valores de acordo com
o pretendido.
A diferença entre o valor obtido (aproximado) e o valor exacto é designado
por erro.
Pretende-se dar uma noção aos utilizadores de métodos numéricos, sobre as
fontes de erros, para que se possam eliminar, ou pelo menos, controlar o
seu valor.
Vamos então descrever o processo de determinação da solução de um
problema físico, por meio de métodos numéricos.
Problema
Modelo
modelagem
físico
resolução
Solução
Matemático
Métodos Numéricos
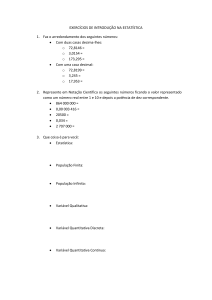
modelagem: obtém-se o modelo matemático que descreve o
comportamento do problema físico;
resolução: obtém-se a solução numérica do modelo matemático da
aplicação de métodos numéricos.
Página 1 de 16 - Erros em Cálculo Numérico
1. Fonte e tipo de erros
A resolução de um problema físico utilizando um método numérico produz, em geral,
uma solução aproximada do problema. A introdução de erros na resolução do problema
pode ser devida a vários factores. Em função da sua origem, podemos considerar os
diferentes tipos de erros:
erros iniciais do problema (são exteriores ao processo de cálculo)
•
erros inerentes ao modelo matemático
•
erros inerentes aos dados
erros associados ao uso de métodos numéricos (ocorrem no processo de cálculo)
•
erros de arredondamento
•
erros de truncatura
Problema
Físico
Modelo
Matemático
Erros
inerentes
aos Dados
Dados e
Parâmetros
do Modelo
Erros inerentes
ao Modelo
Modelo
Erros de
Truncatura
Numérico
Cálculo
Erros de
Arredondamento
Solução
Página 2 de 16 - Erros em Cálculo Numérico
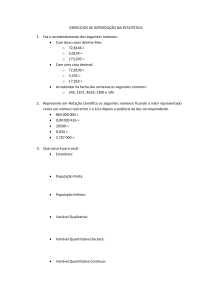
Erros inerentes ao modelo: Um modelo matemático raramente oferece uma
representação exacta dos fenómenos reais. Na grande maioria dos casos são apenas
modelos idealizados, já que ao estudar os fenómenos da natureza vemo-nos forçados,
regra geral, a aceitar certas condições que simplificam o problema por forma a torná-lo
tratável. Os melhores modelos são os que incluem aquelas características do problema
real necessárias para reduzir os erros nesta fase a um nível aceitável.
Erros inerentes aos dados: Um modelo matemático não contém apenas equações e
relações, também contém dados e parâmetros que, frequentemente, são medidos
experimentalmente, e portanto, aproximados. As aproximações nos dados podem ter
grande repercussão no resultado final.
Erros de arredondamento: Quer os nossos cálculos sejam efectuados manualmente
quer sejam obtidos por computador ou numa calculadora, somos conduzidos a utilizar
uma aritmética de precisão finita, ou seja, apenas podemos ter em consideração um
número finito de dígitos. O erro devido a desprezar os outros e arredondar o número é
designado por erro de arredondamento.
Erros de truncatura:
Para compreender o aparecimento deste tipo de erros,
recordemos que: 1. um algoritmo numérico caracteriza-se por efectuar um número finito
de operações aritméticas; 2. a solução exacta de muitos problemas matemáticos não
pode ser obtida executando um número finito de operações aritméticas e estes
problemas têm soluções que apenas podem ser construídas recorrendo a processos
infinitos de cálculo, no sentido de que a solução é o limite da sequência dos cálculos a
efectuar. Ora, como por definição um processo infinito não pode ser terminado, tem de
se recorrer à truncatura do processo após certo número finito de operações. Desta
substituição de um processo infinito por um processo finito, resultam os erros de
truncatura. Em muitos casos, o erro de truncatura é precisamente a diferença entre o
modelo matemático e o modelo numérico.
Existem 2 tipos de erros associados ao uso de métodos numéricos para resolver um
problema num computador ou calculadora: os erros de arredondamento e os erros de
truncatura. Como consequência da ocorrência destes erros, as soluções numéricas
obtidas são, em geral, soluções aproximadas.
Página 3 de 16 - Erros em Cálculo Numérico
Para podermos avaliar quão próxima da solução exacta está a solução aproximada
calculada torna-se necessário estudar o seu erro.
Definições de erro
O conhecimento de uma aproximação para a solução de um problema só tem
interesse se é acompanhada de informação sobre o seu erro.
erro
Seja x o valor aproximado duma quantidade cujo valor exacto é x.
O erro de
x , define-se como:
∆x = x - x
Há vários critérios para avaliar a qualidade de uma aproximação.
erro absoluto
O erro absoluto do valor aproximado x , define-se como o valor absoluto
de ∆x, i.é,
ε x = | ∆x | =
x-x
erro relativo
Se x ≠ 0, o erro relativo do valor aproximado x , define-se como
rx =
∆x
x
=
x-x
x
O erro relativo, como expressa o erro como fracção de |x|, está relacionado
com o erro percentual. Ao produto rx×100 expresso em percentagem dá-se
o nome de percentagem de erro ou erro percentual.
Algarismos significativos
Outra maneira de conhecer a precisão de um valor aproximado é ter
informação sobre o número de algarismos significativos dessa aproximação, i. é,
número de algarismos da esquerda para a direita e a partir do primeiro dígito
diferente de zero.
Página 4 de 16 - Erros em Cálculo Numérico
Exemplos:
•
O valor aproximado 3.14 para π = 3.1415926535... tem 3 algarismos
significativos;
•
A aproximação 0.333 para 1/3 =0.3333333333... tem 3 dígitos
significativos;
•
O valor aproximado 0.0498 para e-3 =0.049787068 tem 3 algarismos
significativos.
2. Erros de Arredondamento
Quase todo o cálculo numérico é realizado num computador ou numa calculadora.
Como as máquinas têm capacidade finita para guardar informação, apenas conseguem
representar exactamente um número finito de números reais, cada um com um número
fixo de dígitos (algarismos).
Sendo o suporte numérico da maioria dos problemas matemáticos o conjunto dos
números reais, que é infinito e contínuo, levantam-se algumas questões, sendo duas
delas:
•
Como são representados números reais numa máquina?
•
Quais as consequências dessa representação de IR nos resultados obtidos?
Iremos responder, de modo sucinto, a estas duas questões. Começaremos por explicar
que a representação de números reais numa máquina é feita por arredondamento, e
verificaremos, em seguida, que a consequência é a ocorrência dos chamados erros de
arredondamento.
Arredondamento
Para a maioria dos números reais a representação é feita por arredondamento (à
excepção de números demasiado grandes ou demasiado pequenos, em valor absoluto,
para poderem ser representados na máquina).
Definem-se vários tipos de arredondamento. Aqui faremos apenas referência ao mais
conhecido, e iremos apresentá-lo através de um exemplo.
Exemplo: Consideremos o número π = 3.1415926535... .Vamos definir um processo de
representação deste número com 3, 4 e 5 algarismos.
Página 5 de 16 - Erros em Cálculo Numérico
•
Comecemos por escrever π = 3.1415926535... com 3 algarismos eliminando os
dígitos a partir do quarto. Sendo o primeiro algarismo eliminado inferior a 5
consideramos
π1 = 3.14
como a representação, por arredondamento, de π com 3 dígitos.
•
Vamos agora escrever π = 3.1415926535... com 4 algarismos eliminando os
dígitos a partir do quinto. Sendo o primeiro algarismo eliminado igual a 5,
consideramos
π 2 = 3.142
como a representação, por arredondamento, de π com 4 dígitos.
•
Finalmente escrevemos π = 3.1415926535... com 5 algarismos eliminando os
dígitos a partir do sexto. Sendo o primeiro algarismo eliminado superior a 5,
consideramos
π 3 = 3.1416
como a representação, por arredondamento, de π com 5 dígitos.
O procedimento para representar um real com um número finito de dígitos por
arredondamento é o seguinte:
ignoram-se os algarismos à direita daqule que fica na última ordem decimal que
se pretende reter;
Se o primeiro dígito desprezado é inferior a 5, o número obtido é a representação
desse real por arredondamento;
Se o primeiro dígito eliminado é superior ou igual a 5 adiciona-se uma unidade
na ordem decimal do último dígito conservado para obter a representação desse
real por arredondamento.
Observe-se, que se um número x
é obtido de x por este procedimento
(arredondamento), então todos os números de x são significativos.
Página 6 de 16 - Erros em Cálculo Numérico
Erros de arredondamento
A distância entre um número real e uma sua aproximação obtida por arredondamento
é chamada erro de arredondamento.
•
Erro absoluto de arredondamento
Se x é um valor obtido por arredondamento de x então chama-se erro absoluto
de arredondamento a | x − x |.
•
Erro relativo de arredondamento
Se x ≠ 0 e x é um valor obtido por arredondamento de x então chama-se erro
relativo de arredondamento a
| x-x|
.
x
Exemplo: Calculemos os erros (absolutos) de arredondamento das aproximações
obtidas para π = 3.14159265 no exemplo anterior. Tem-se
| ∆π | = | π - π | =
= 0.5×10-2
| π - 3.14 | = 0.0015926... < 0.005
| ∆π | = | π - π | = | π - 3.142| = 0.0004073... < 0.0005 = 0.5×10-3
| ∆π | = | π - π | = | π - 3.1416 | = 0.0000073... < 0.00005 = 0.5×10-4
Note-se que em cada um dos casos todos os algarismos do valor aproximado são
significativos.
Em geral, dizemos que x é o valor aproximado de x, arredondado para k casas decimais
correctas se:
∆x = x - x ≤ 0.5 ×10
−k
.
Mas os erros de arredondamento não ocorrem apenas na representação de dados.
Ocorrem também na representação de resultados de operações aritméticas. Isto porque o
resultado de uma operação aritmética entre dois números representados com um número
fixo de algarismos pode não ser um número com o mesmo número de algarismos.
Exemplo:
O resultado da divisão de 3.1416 por 9, números que têm no máximo 5 dígitos, é
Página 7 de 16 - Erros em Cálculo Numérico
3.1416
= 0.3490666... uma dízima infinita. O resultado da divisão arredondado para 5
9
dígitos é 0.34907.
3. Erros de Truncatura
Há problemas que não podem ser resolvidos exactamente realizando apenas um
número finito de operações aritméticas, mas cujas soluções podem ser aproximadas
com uma sequência finita de operações aritméticas. São assim gerados os erros de
truncatura. Apresentamos dois exemplos.
EX 1: Cálculo numérico da soma de uma série
Seja S a soma de uma série convergente de termo geral aj, S =
∞
∑a
j =0
Quando aproximamos S por Sn =
n
∑a
j =0
j
j
.
, o erro Rn = S - Sn é um erro de truncatura.
É originado pela substituição do cálculo exacto da soma de uma série, pelo cálculo da
soma de n+1 termos dessa série.
EX 2: Cálculo de valores de funções transcendentes
Funções racionais (polinómios e quocientes de polinómios) são as únicas cujos valores
podem ser calculados usando apenas um número finito de operações aritméticas. Para
calcular numericamente valores de uma função transcendente podemos
aproximá-la por uma função racional.
Aproximação de funções
A aproximação de funções é um tema central da análise numérica. A razão disso é a
ocorrência de um grande número de problemas matemáticos, envolvendo funções, cuja
solução não é possível (ou é muito difícil) determinar por métodos analíticos. São
exemplos de tais problemas o cálculo do valor de um integral definido quando se
desconhece uma primitiva da função integranda, a determinação de zeros de uma função
quando não existe uma fórmula explícita para o fazer, o desenho do gráfico de uma
Página 8 de 16 - Erros em Cálculo Numérico
função da qual se conhecem apenas alguns dos seus valores determinados numérica ou
experimentalmente, ...
A estratégia no desenvolvimento de métodos numéricos para resolver estes problemas é
baseada na substituição da função dada por uma função aproximante, considerada mais
"simples", cujo comportamento é muito semelhante ao da função dada.
Por várias razões, as funções aproximantes mais usadas são os polinómios. Por um lado
podem calcular-se valores de um polinómio realizando apenas um número finito de
operações aritméticas. Por outro os polinómios são funções fáceis de derivar e integrar.
Além disso, o teorema de Weierstrass estabelece que toda a função contínua num
intervalo fechado pode ser aproximada nesse intervalo, tão bem quanto se queira, por
um polinómio.
TEOREMA (Teorema de APROXIMAÇÃO DE WEIERSTRASS)
Seja [a, b ] ∈ IR e ε um número real positivo qualquer. Então, para toda a função f
contínua em [a,b] existe um polinómio p tal que
max f (x) - p (x) < ε
x∈[a,b ]
(
Como medir a distância entre uma função e uma aproximação polinomial para essa
função? Por outras palavras, como se define o erro de um polinómio aproximante de
uma dada função?
Há mais do que um critério para definir o erro de uma aproximação para uma função.
Aqui apresentaremos apenas um.
Erro de um polinómio aproximante
Seja f uma função real de variável real contínua em [a, b] e p uma aproximação
polinomial para f em [a, b]. Define-se erro da aproximação p por
max f (x) - p (x)
x∈[a,b ]
Página 9 de 16 - Erros em Cálculo Numérico
Polinómio de Taylor
O exemplo mais conhecido de polinómio aproximante de uma função é dado pelo
polinómio de Taylor.
Seja f uma função real de variável real com derivadas contínuas até à ordem n num
ponto x0 do seu domínio. O polinómio de grau n definido por
p n ( x) = f ( x0 ) + ( x − x0 ) f ' ( x0 ) +
2
n
( x − x0 )
( x − x0 )
f ' ' ( x0 ) + ... +
f
n!
2!
(n)
( x0 )
(1)
é chamado polinómio de Taylor da função f no ponto x0.
TEOREMA (Teorema de TAYLOR)
Seja f uma função com derivadas contínuas até à ordem n+1 num intervalo [a, b] e seja
x0 ∈ ]a, b[ . Então para x∈ [a, b],
2
n
(x − x 0 )
(x − x 0 ) (n)
f (x0 ) + Rn(x)
f(x) = f(x 0 ) + (x − x0 )f'(x0 ) +
f''(x 0 ) + ... +
n!
2!
onde,
Rn (x) =
(x − x0 ) n +1 (n+1 )
f
(η)
(n + 1 )!
sendo
η ∈ ] min{x,x0 }, max {x,x0 } [ .
Note-se que, se f ( n +1) ( x) ≤ M para x∈ [a, b] então
n +1
x-x0
(x − x0 ) n +1 (n+1 )
f (x) - pn (x) = Rn(x) =
f
(η) ≤
M.
(n + 1 )!
(n + 1)!
Polinómio de Maclaurin
É o polinómio que se obtém do polinómio de Taylor (1) fazendo x0=0.
p n ( x ) = f ( 0) + x ⋅ f ' ( 0) +
2
n
x
x
f ' ' (0) + ... +
f
n!
2!
(n )
( 0)
Página 10 de 16 - Erros em Cálculo Numérico
(2)
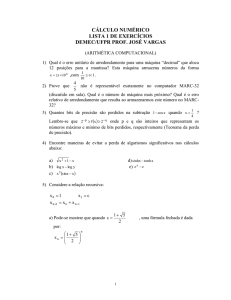
Exemplo 1: a) Calcule o polinómio de Maclaurin de grau 3 da função f definida por
f(x) = sin (x),
Tem-se
⎡ π π⎤
x ∈ ⎢− , ⎥ .
⎣ 4 4⎦
⇒
⇒
⇒
⇒
f(x) = sin(x)
f ´(x) = cos(x)
f ´´(x) = sin(x)
f ´´´(x) = cos(x)
f(0) = sin(0) = 0,
f ´(0) = cos(0) = 1,
f ´´(0) = sin(0) = 0,
f ´´´(0) = cos(0) = -1.
Substituindo em (2) para n=3
p3 ( x) = f (0) + x ⋅ f ' (0) +
x2
x3
f ' ' (0) +
f ' ' ' (0)
2!
3!
obtém-se o polinómio
p3 ( x) = 0 + x ⋅ 1 +
x2
x3
x3
⋅0 +
⋅ (−1) = x −
.
2!
3!
6
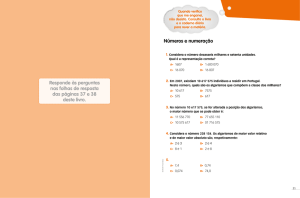
⎡ π π⎤
Na figura seguinte estão representadas a função f e o polinómio p3 no intervalo ⎢− , ⎥ .
⎣ 4 4⎦
0.8
0.6
0.4
y
0.2
0
-0.2
-0.4
-0.6
-0.8
-0.8
-0.6
-0.4
-0.2
0
x
0.2
0.4
0.6
0.8
À escala usada os gráficos de f e p3 quase não se distinguem.
b) Calcule o erro da aproximação polinomial obtida na alínea anterior.
Tem-se
f(x) = sin (x) = p3(x) + R3(x)
R3 (x) =
x4
x4
(sinx) x( 4=)η∈]0, x[ = (sinx) x=η∈]0,x[
4!
4!
4
max
⎡ π π⎤
x∈⎢ − , ⎥
⎣ 4 4⎦
sin (x) - p3(x) = max R3(x) = max
⎡ π π⎤
x∈⎢ − , ⎥
⎣ 4 4⎦
⎡ π π⎤
x∈⎢ − , ⎥
⎣ 4 4⎦
⎛π⎞
⎜ ⎟
x4
4
⎛π⎞
(sin x) < ⎝ ⎠ ⋅ sin⎜ ⎟ ≈ 0.01 .
4!
4!
⎝4⎠
Página 11 de 16 - Erros em Cálculo Numérico
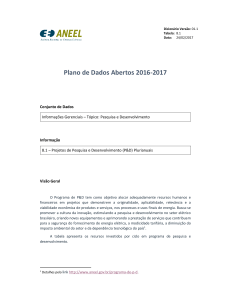
Exemplo 2: a) Calcule os polinómios de Taylor de grau 3 e de grau 2 da função g
definida por g(x) = ex,
g(x) = ex
g ´(x) = ex
g ´´(x) = ex
g ´´´(x) = ex
Tem-se
x ∈ [− 1,1]
no ponto x0 = 0.
g(0) = e0 = 1,
g ´(0) = e0 = 1,
g ´´(0) = e0 = 1,
g ´´´(0) = e0 = 1.
⇒
⇒
⇒
⇒
Substituindo em (1) para n=3 e com x0=0
p3 (x) = g(0) + x ⋅ g' (0) +
x2
x3
g' ' (0) + g' ' ' (0)
2!
3!
obtém-se o polinómio
x2
x3
x2 x3
p3 (x) = 1+ x ⋅1+ ⋅1+ ⋅1= 1+ x + +
2!
3!
2 6
Substituindo em (1) para n=2 e com x0=0,
p 2 ( x ) = g (0) + x ⋅ g ' (0) +
x2
g ' ' (0)
2!
obtém-se o polinómio
p 2 ( x) = 1 + x ⋅ 1 +
x2
x2
⋅1 = 1 + x +
2!
2
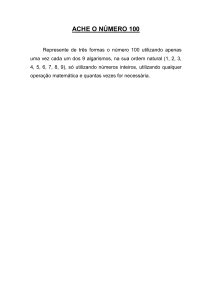
Na figura seguinte estão representados a função g (a traço contínuo) e os polinómios p2
e p3 em [-1, 1].
3
2.5
2
y
1.5
1
0.5
0
-0.5
-1
-1
-0.8
-0.6
-0.4
-0.2
0
x
0.2
0.4
0.6
0.8
Página 12 de 16 - Erros em Cálculo Numérico
1
Analisando os gráficos nos dois exemplos anteriores concluímos que os polinómios de
Taylor calculados não se afastam muito da função dada, no intervalo indicado.
b) Calcule o erro dos polinómios aproximantes p3 e p2 para a função g.
x 4 x (4)
x4 x (1) 1
x
max e - p3(x) = max (e ) = max
e <
⋅ e ≈ 0.125.
x∈[−1,1]
x∈[−1,1] 4!
x∈[−1,1] 4!
4!
4
x3
x3 x (1) 1
max e x - p2(x) = max (e x )(3) = max
e <
⋅ e ≈ 0.5 .
x∈[−1,1] 3!
x∈[−1,1]
x∈[−1,1] 3!
3!
3
⎛π⎞
⎛π ⎞
Exemplo3: Obter uma aproximação para sin⎜ ⎟ calculando p3 ⎜ ⎟ .
⎝6⎠
⎝6⎠
No exemplo1 construímos um polinómio aproximante de grau 3 para a função
⎡ π π⎤
f(x)=sin(x) com x ∈ ⎢− , ⎥ ,
⎣ 4 4⎦
p3 ( x) = x −
x3
.
6
3
⎛π ⎞
⎜ ⎟
⎛π ⎞ ⎛π ⎞ ⎝ 6 ⎠
p3 ⎜ ⎟ = ⎜ ⎟ −
= 0.4996741
6
⎝6⎠ ⎝6⎠
O valor absoluto do erro é majorado escrevendo
E5 =
π /4
cos(ξ ) 5
1
x ≤ x5 ≤
≤ 0.01. .
5!
5!
5!
Para finalizar este ponto, é de referir que nos capítulos seguintes descreveremos alguns
métodos numéricos que originam erros de truncatura.
Página 13 de 16 - Erros em Cálculo Numérico
4. Condicionamento e Estabilidade
Erros iniciais
Há problemas cuja solução é muito sensível a variações nos dados, isto é, para certos
problemas erros nos dados quase desprezáveis, podem originar variações muito grandes
na solução. Este fenómeno é independente do método usado para resolver problemas.
Como se propagam os erros nos dados?
Propagação de erros
Supunhamos que se pretende calcular o valor de z = f ( x, y ) usando os valores
aproximados x e y em vez de x e y respectivamente.
Seja z = f( x, y ) . Queremos conhecer o erro do valor aproximado z para z, assumindo
que todas as operações indicadas na expressão de f podem ser efectuadas exactamente.
Isto é, estamos interessados no efeito da propagação dos erros ε _ = x − x e ε _ = y − y
x
y
na solução do problema.
Se existem e são contínuas f x' e f y' tem-se, pelo teorema de Taylor para funções de
duas variáveis,
f(x, y)= f( x, y) +(x− x)fx'(η1,η2 ) +(y− y)fy'(η1,η2 ),
]
{ }
{ }[
onde η1 ∈ min x,x , max x,x
]
{ }
{ }[ .
e η 2 ∈ min y,y , max y,y
Se x está próximo de x e y está próximo de y então pode escrever-se
ε z = z − z ≈ f x' (x, y) ⋅ ε + f y' (x, y) ⋅ ε
x
y
Supunhamos que se pretende calcular o valor de w = f ( x, y, z ) usando os valores
aproximados x , y e z ,
em vez de x, y e z respectivamente. Seja w = f( x,y, z ) .
Queremos conhecer o erro do valor aproximado w para w, assumindo que todas as
operações indicadas na expressão de f podem ser efectuadas exactamente.
Página 14 de 16 - Erros em Cálculo Numérico
Isto é, estamos interessados no efeito da propagação dos erros
ε x = x − x = ∆x ,
εy = y − y = ∆y
ε z = z − z = ∆z
e
na solução do problema.
Se x está próximo de x, y está próximo de y e z está próximo de z então pode
escrever-se
ε
= w − w ≈ f x' ( x, y, z ) ⋅ ε x + f y' ( x, y, z ) ⋅ ε y + f z' ( x, y, z ) ⋅ ε z
w
Exemplo: Determinar um limite superior do erro absoluto do volume de uma esfera,
V=
1 3
πd , se o diâmetro é d = 3.7 ± 0.05 cm e π ≅ 3.14.
6
Resolução:
Considerando π e d como variáveis, calculemos as derivadas parciais:
1
∂V
1 3
∂V
=
πd
= d e
∂d
2
∂π
6
d = 3 .7 ,
e como
3
∆ d = 0 . 05
e
_
π = 3.14 ,
_
∆ π = 0.00159...
Utilizando a fórmula anterior temos que:
∆V ≤
( )
( )
2
1
1
∂V
∂V
3
d , π ∆π +
d , π ∆ d = (3.7) × 0.00159 + × 3.14 × (3.7) × 0.05 = 1.088
6
2
∂π
∂d
e portanto
⎛ 1 3⎞
V =V + ∆V = ⎜ π d ⎟ ± 1.088 = ( 26.508 ± 1.088 )cm3 .
⎝6
⎠
Generalizando, seja F = f ( x1 , x 2 ,..., x n ) uma função de n variáveis, e supondo que a
cada variável xi corresponde ε xi = x − xi = ∆ xi , então o erro de F obtem-se utilizando
a fórmula de propagação de erro:
ε
F
= F − F ≈ f x' ( x 1 , x 2 ,..., x n ) ⋅ ε x + f x' ( x 1 , x 2 ,..., x n ) ⋅ ε x + ... + f x' ( x 1 , x 2 ,..., x n ) ⋅ ε x
1
1
2
2
n
Com base na fórmula da propagação do erro, podemos encontrar as regras para a
propagação de erros na soma e no produto.
Página 15 de 16 - Erros em Cálculo Numérico
n
Cancelamento subtractivo
O efeito da perda de dígitos significativos na subtracção de números quase iguais é
chamado cancelamento subtractivo.
Exemplo:
Consideremos os números
_
x = 4567 e y = 4566
e as aproximações
_
x = 67.5796 e y = 67.5722 , ambas com 6 algarismos significativos. Tem-se
_
_
x − y = 0.0074 , que é uma aproximação com 2 algarismos significativos para x - y .
Numa só operação aritmética “perderam-se” 4 dígitos significativos.
Condicionamento (de um problema)
Devido à existência dos chamados erros iniciais, os dados e parâmetros de um problema
matemático que se resolve não coincidem, em geral, com os dados e parâmetros do
problema posto.
O condicionamento de um problema descreve a “sensibilidade” do problema a variações
nos dados. Não depende do método usado para resolver o problema.
Um problema matemático cuja solução pode ser muito sensível a variações nos dados e
parâmetros diz-se mal condicionado.
Um problema diz-se bem condicionado se pequenas variações nos dados e parâmetros
induzem sempre pequenas variações na solução.
Estabilidade (de um método)
A resolução de um problema numérico requer, em geral, a execução de um grande
número de operações aritméticas e, originando de cada uma um erro de
arredondamento, o efeito cumulativo desses erros pode afectar significativamente o
resultado calculado.
A estabilidade de um método descreve a “sensibilidade” do método relativamente à
acumulação dos erros gerados durante o cálculo.
Um método numérico diz-se instável se a acumulação de erros durante o cálculo pode
ter grande influência na precisão dos resultados.
Um método estável produz sempre bons resultados (com problemas bem
condicionados).
Estes apontamentos foram feitos com base no 1º capítulo do livro “Análise Numérica”
da Profª. Drª. Mª Raquel Valença, Universidade Aberta, bem como noutros livros
referidos na bibliografia do programa da disciplina.
Página 16 de 16 - Erros em Cálculo Numérico