Controle da posição angular do eixo de um motor DC utilizando
estrutura variável e modo deslizante
Leandro José Cesini Silva
Faculdade de Engenharia de Ilha Solteira, Universidade Estadual
Paulista – UNESP, São Paulo
1.Objetivos
Angulo (rad)
1
0.5
O controle de um motor DC tem por objetivo
controlar o movimento do eixo do mesmo. O
presente trabalho tem por objetivo aplicar
técnicas de controle robusto, utilizando-se de
estrutura variável e modo deslizante para
efetuar o controle do sistema, utilizando a
ferramenta de programação MatLab/Simulink.
2.Material e Métodos
O controle do movimento do eixo de um motor
DC é dado pela combinação de equações
diferenciais provenientes da mecânica clássica
e das leis de Kirchhoff. Isso se deve ao fato de
que foi necessário analisar o torque do eixo e a
quantidade de tensão e corrente necessárias
para controlar o mesmo.
O sistema de equações no espaço de estados
conta com uma única entrada de controle, dada
pela tensão a ser aplicada nas bobinas do
motor. As variáveis de estados são o ângulo de
rotação e a velocidade angular do eixo, e a
corrente nas bobinas do mesmo.
Uma superfície deslizante foi projetada para o
sistema e a lei de controle utilizada é
constituída de uma componente linear e uma
outra componente não linear. A primeira dada
pelo controle equivalente proposto por Utkin e a
segunda por uma função sinal. Foram
consideradas também as incertezas do
sistema.
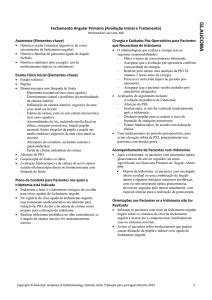
3.Resultados e discussão
O sistema foi simulado no software
MatLab/Simulink em que todas as variáveis de
estado, a função deslizante e o controle
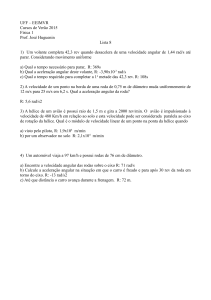
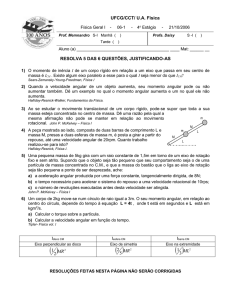
puderam ser analisados. A seguir encontramse as repostas referente ao ângulo, velocidade
angular, corrente elétrica sobre as bobinas,
superfície de deslizamento e ao sinal de
controle.
0
-0.5
0
1
2
Velocidade Angular (rad/seg)
8
9
10
0
1
2
Corrente eletrica (amp)
0
1
2
0.2
3
4
5
6
7
0
-0.2
-0.4
-0.6
-0.8
0.5
3
4
5
6
7
8
9
10
3
4
5
6
7
8
9
10
0
-0.5
Figura 1: Resposta do ângulo, velocidade angular e
corrente elétrica.
Funcão de Deslizamento
1.2
1
0.8
0.6
0.4
0.2
0
-0.2
0
1
2
3
4
5
6
7
8
9
10
7
8
9
10
Controle (volts)
0.5
0
-0.5
-1
-1.5
-2
-2.5
-3
0
1
2
3
4
5
6
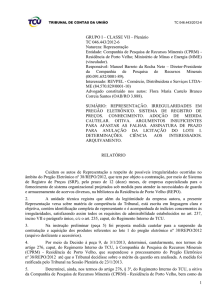
Figura 2: Resposta da superfície de deslizamento e
do sinal de controle.
4.Conclusões
Os resultados
obtidos, após
diversas
simulações, mostram que o movimento
controlado do eixo do motor DC apresentou
uma boa performance diante da superfície e da
lei de controle projetadas.
5.Referências Bibliográficas
[1] Ogata, K., Engenharia de controle
moderno,
Ed. LTC – 2000.
[2] Edwards, C e Spurgeon, S. K., Sliding
Mode
Control – Theory and
Applications, Ed. Taylor &
Francis –
1998.