Universidade Federal
de
São Carlos
Disciplina de Laboratório de Controle e Servomecanismo
ESTUDO DO KIT DVC24
Professor:
Dr. Orides Morandin Junior
Alunos:
RA:
André Luiz Ferraz Lourenço
264563
Gabriel Cilento Pereira
264466
Lucas Sebastião de Paula
Felipe Maion Garcia
280526
1
Universidade Federal
de
São Carlos
ÍNDICE
I. Resumo
II. Objetivo
III. Introdução Teórica
IV. Materiais Utilizados
V. Procedimento Experimental
V. 1. Procedimento para Calibração do Motor
V. 2. Procedimento para Determinação da Resistência de Armadura R
V. 3. Procedimento para Determinação da Indutância de Armadura L
V. 4 Procedimento para Determinação da Constante de Força Contra Eletromotriz Ke
V. 5. Procedimento para Determinação de B e F
V. 6. Procedimento para Determinação de J
VI. Resultados e Discussões
VI. 1. Calibração do Motor
VI. 2. Determinação da Resistência de Armadura R
VI. 3. Determinação da Indutância de Armadura L
VI. 4. Determinação da Constante de Força Contra Eletromotriz Ke
VI. 5. Determinação de B e F
VI. 6. Determinação de J
VII. Conclusão
VIII. Apêndice
IX. Referências Bibliográficas
2
Universidade Federal
de
São Carlos
I. RESUMO
*******Sou mto ruim em resumir ... por favor algum dê um jeito nisso.
II. OBJETIVOS
Analisar qualitativamente o motor de corrente contínua quanto ao seu
desempenho, quanto ao seu sobrepasso (overshoot), tempo de subida e de estabilização.
Obter quantitativamente de maneira experimental os valores dos seguintes
parâmetros físicos: Resistência, Indutância, Constante Contra Eletromotriz, Constantes de
Atrito, Momento de Inércia e expressar a função de transferência do motor.
III. INTRODUÇÃO TEÓRICA
Um motor de corrente contínua como a do kit utilizado em laboratório pode ser
modelado matematicamente, a partir da segunda lei de Kirchhoff e terceira lei de Newton.
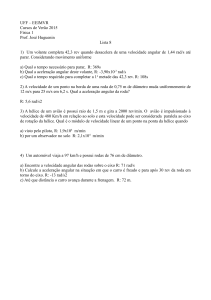
Para tanto, considere o circuito equivalente da Figura 1, onde:
é a tensão de alimentação do motor
é a corrente elétrica do circuito
é a velocidade angular do eixo
As outras constantes destas equações representam parâmetros físicos específicos do
motor utilizado: resistência , indutância , constante contra eletromotriz
,
constantes de atrito
e momento de inércia .
3
Universidade Federal
de
São Carlos
Figura 1 - Circuito equivalente de um motor CC controlado pela armadura
Aplicando-se a lei das tensões de Kirchhoff ao circuito da armadura, obtém-se:
- PARTE ELÉTRICA
Em seguida, usando-se a lei de Newton para o movimento rotacional, pode-se
escrever:
- PARTE MECÂNICA
Com o objetivo de se simular computacionalmente o modelo do motor CC
apresentado, é necessário primeiro que os valores numéricos de todos os parâmetros
físicos citados sejam obtidos. Este relatório descreve a obtenção destes e apresenta seus
valores.
VI. MATERIAIS UTILIZADOS
- Kit para controle de motores Modelo DVC24;
- Osciloscópio Analógico;
- Osciloscópio Digital;
- Multímetro;
- Fonte de Tensão e Corrente;
- Gerador de Funções;
- Resistor 560Ω
4
Universidade Federal
de
São Carlos
V. PROCEDIMENTO EXPERIMENTAL
V. 1. Procedimento para Calibração do Motor
Conectou-se o voltímetro à saída de sinal;
Variou-se a velocidade do motor através do drive de 0 a 200 rpm, anotando os
valores de velocidade e tensão. Foi utilizado 10 pontos que cobriu toda faixa;
Organizou-se uma tabela relacionando a velocidade lida no tacômetro com a
tensão lida no voltímetro.
Foram feitas as devidas conversões para o Sistema Internacional de Unidades.
V. 2. Procedimento para Determinação da Resistência de Armadura R
Travou-se o motor
Aplicou-se uma corrente menor que 50% da corrente nominal, ou seja, menor que
1A;
Foram aplicadas tensões conhecidas no intervalo de 0.2 a 2.6 aproximadamente e
mediu-se a corrente no motor.
V. 3. Procedimento para Determinação da Indutância de Armadura L
Método por Resposta em freqüência:
Manteve-se o rotor travado
Acrescentou-se uma resistência
Rext em série com o circuito da armadura tal que
Rext R . Assim o circuito se tornou um filtro RL passa baixa e a resistência de
armadura pode ser desprezada.
Foi aplicado um sinal senoidal com gerador de função e com o osciloscópio
determinou-se a freqüência de corte do filtro
V. 4 Procedimento para Determinação da Constante de Força Contra Eletromotriz Ke
5
Universidade Federal
de
São Carlos
O Motor foi destravado;
Variando a tensão ao motor de 0 a 24Vdc dividido em 10 intervalos, foi 10 medido
os valores de corrente e de velocidade.
V. 5. Procedimento para Determinação de B e F
O Motor permaneceu destravado;
Foram utilizados do procedimento anterior para determinação de B e F;
Para determinação de F estático e F dinâmico aumentou-se vagarosamente a
tensão no motor e medindo a corrente. Foi anotado o valor de corrente
imediatamente antes que o motor iniciasse o movimento.
V. 6. Procedimento para Determinação de J
Foi aplicada ao motor uma tensão até que a velocidade atingisse 1500 rpm;
Desconectaram-se os cabos e observou-se o decaimento da velocidade através do
osciloscópio digital;
VI. RESULTADOS E DISCUSSÕES
VI. 1. Calibração do Motor
Medida
1
2
3
4
5
6
7
8
Tabela 1 - Calibração do transmissor de velocidade
Velocidade (rpm)
Velocidade (rad/s)
Tensão (V)
200
20,9440
0,44
400
41,8879
0,86
603
63,1460
1,28
792
82,9380
1,67
997
104,4056
2,09
1204
126,0826
2,53
1395
146,0841
2,93
1599
167,4469
3,36
6
Universidade Federal
de
São Carlos
9
10
1808
2004
189,3333
209,8584
3,78
4,18
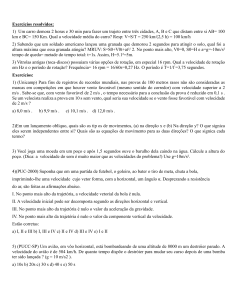
Velocidade X Tensão
4.50
4.00
y = 0.002x + 0.027
Tensão (V)
3.50
3.00
2.50
V(w)
2.00
Linear (V(w))
1.50
1.00
0.50
0.00
0.0000
500.0000 1,000.000 1,500.000 2,000.000 2,500.000
0
0
0
0
Velocidade (rad/s)
Gráfico 1 – Calibragem de Velocidade x Tensão
VI. 2. Determinação da Resistência de Armadura R
Medida
Tabela 2 - Determinação da resistência de armadura R
Tensão Aplicada (V)
Corrente Medida (A)
Resistência Obtida(Ω)
1
0.2
0.08
2.5000
2
0.4
0.16
2.5000
3
0.6
0.24
2.5000
7
Universidade Federal
de
São Carlos
4
1.0
0.36
2.7778
5
1.2
0.43
2.7907
6
1.5
0.56
2.6786
7
2.1
0.75
2.8000
8
2.6
0.97
2.6804
Média
2.6534
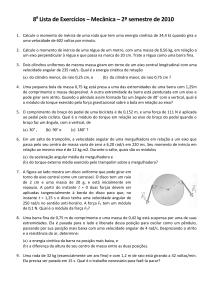
A média da resistência calculada R 2.6534 , porém utilizamos o método dos
mínimos quadrados para minimizar o erro usando regressão linear. Obtivemos o novo
valor de
R 2.718 . O resultado é obtido através do gráfico abaixo:
Tensão X Corrente
3
V = 2.718 . i
Tensão (V)
2.5
2
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
1.2
Corrente (A)
Gráfico 2 – Relação Tensão X Corrente e equação de aproximação linear
8
Universidade Federal
de
São Carlos
VI. 3. Determinação da Indutância de Armadura L
Foi escolhido uma resistência externa Rext 560 , sendo Rext R , ou seja:
560 2.718 . O valor de tensão máxima obtido desde o começo da varredura de
freqüência foi Vmax 10V . Quando aproximadamente na tensão de corte Vcorte 7V a
freqüência de corte compreendia o intervalo 31kHz f corte 32kHz . Adotamos
f corte 31.5kHz .
Nesta freqüência tem-se X L Rext e utilizando da Equação 4.1 foi calculada uma
indutância de:
L 2.8mH .
VI. 4. Determinação da Constante de Força Contra Eletromotriz Ke
Medid
Tabela3 - Determinação da Constante de Força Contra Eletromotriz Ke
Tensão Corrente
Velocidade
Velocidade
vg v A R iA
a
(V)
(A)
(rpm)
(rad/s)
(V)
1
2
0.21
145
15.1844
1.4292
2
4
0.25
340
35.6047
3.3205
3
6
0.28
532
55.7109
5.2390
4
8
0.31
736
77.0737
7.1574
5
10
0.34
925
96.8658
9.0759
6
12
0.37
1123
117.6003
10.9943
7
14
0.39
1322
138.4395
12.9400
8
16
0.42
1524
159.5929
14.8584
9
Universidade Federal
de
São Carlos
9
18
0.44
1716
179.6991
16.8041
10
20
0.45
1915
200.5383
18.7769
11
22
0.47
2116
221.5870
20.7225
12
24
0.48
2311
242.0074
22.6954
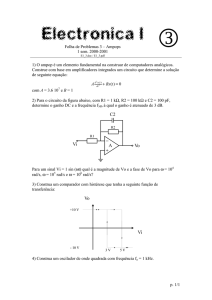
Tensão X Velocidade Angular
25.0000
y = 0.0935x
Tensão (V)
20.0000
15.0000
Ke
Linear (Ke)
10.0000
5.0000
0.0000
0
50
100
150
200
250
300
Velocidade Angular (rad/s)
Gráfico 3 - Tensão X Velocidade Angular e equação de aproximação linear
O coeficiente linear
K e 9.35 102
VI. 5. Determinação de B e F
Medid
Tabela 4 - Determinação de B e F
Corrente
Velocidade
e KT i A
10
Universidade Federal
de
São Carlos
a
(A)
(rad/s)
(N.m)
1
0.21
15.1844
0.019635
2
0.25
35.6047
0.023375
3
0.28
55.7109
0.02618
4
0.31
77.0737
0.028985
5
0.34
96.8658
0.03179
6
0.37
117.6003
0.034595
7
0.39
138.4395
0.036465
8
0.42
159.5929
0.03927
9
0.44
179.6991
0.04114
10
0.45
200.5383
0.042075
11
0.47
221.5870
0.043945
12
0.48
242.0074
0.04488
11
Universidade Federal
de
São Carlos
Momento de Inércia X Velocidade angular
0.05
y = 0.0001x + 0.02
0.045
Momento de Inércia
0.04
0.035
0.03
Kt
Linear (Kt)
0.025
0.02
0.015
0.01
0.005
0
0
50
100
150
200
250
300
Velocidade angular
Gráfico 4 – Momento de Inércia X Velocidade Angular e equação de aproximação linear
4
A equação do momento de inércia é e 1.198 x10 0.01811 . Sendo,
portanto, o coeficiente angular B 1.198 x10 e coeficiente linear F 0.01811 .
4
O valor de corrente máxima no repouso é I REPOUSO 0.35 A e o coeficiente linear
estático é, portanto, determinado:
Fe 0.0327
VI. 6. Determinação de J
Após colocar no gráfico o decaimento da velocidade ω versus o tempo t:
12
Universidade Federal
de
São Carlos
Gráfico 5– Imagem do Gráfico de Decaimento da Velocidade Angular X Tempo
Determinamos a constante de tempo, τ, quando a curva de decaimento atinge 36,8%
de seu valor inicial, logo, τ =2,50s, pois ω atinge 55,26 rad/s que é 36,8% de 150,15 rad/s
(1500 rpm) .
Como τ = J/B, e com o valor de B, chegamos então que J = 2,5.10-4 N.m. A-1.s-1
VII. CONCLUSÃO
Os parâmetros físicos do motor CC presente no kit estão apresentados na tabela
abaixo:
13
Universidade Federal
de
São Carlos
Parâmetro
Valor
2.718
2.8mH
9.35 10 2 V s
e
rad
1.0 10 N m
A
2
2.0 10 N m
2.5 10 4 N m
A.s
4
Tabela 5 – Parâmetros físicos
VIII. SIMULAÇÃO COMPUTACIONAL
Para simular o sistema no computador, aplicaram-se às equações (1.1) (1.2) (1.3) (1.4) a
transformada de Laplace, representando em blocos:
ω(s)
Va(s)
Kt
Ke
Analogamente:
ω(s)
Va(s)
TEXT + F
Que para ser calculado utilizando SciLab™ programa gratuito tipo MatLab®, utilizou-se o código de
programação:
r=2.718;
l=2.8e-3;
ke= 9.35e-2;
kt = 9.35e-2;
14
Universidade Federal
de
São Carlos
b=1.1985e-4;
f=0.01811;
j=2.5e-4;
V0 = 8
t=0:0.001:1.20;
clf();
s = poly(0,"s");
G1= syslin('c',(kt/((l*j*s^2)+(r*j+b*l)*s +r*b+ke*kt)));
gg1 = csim('step',t,V0*G1); // resposta ao degrau V0
//plot(t,gg1);
G2 = (-(l*s + r) /((l*j*s^2)+(r*j+b*l)*s +r*b+ke*kt));
gg2 = csim ('step',t,f*G2); // resposta ao atrito
//plot(t,gg2);
ggt= gg1 + gg2; // Linearidade
plot(t,ggt);
wss =(kt*V0-r*f)/(r*b +ke*kt)
Retornando para o Degrau de V0 = 8V:
Gráfico 6 - Velocidade (rad/s) x Tempo (s).
wss = 77.059643 rad/s, muito próximo do medido que foi 77.0737 rad/s.
15
Universidade Federal
de
São Carlos
IX. APÊNDICE
Equações 1 - Equações diferenciais que representam o motor de corrente continua:
Equação 1.1 - Equação diferencial que representam parte elétrica do motor:
vA R iA L
dia
v g (parte elétrica)
dt
Equação 1.2 - Equação diferencial que representam parte mecânica do motor:
e J
d
B F (parte mecânica)
dt
Equação 1.3 –:
vg K e
Equação 1.4 – Momento de Inércia Elétrica:
e KT i A
Equações 2 – Calibração do Motor
Equação 2.1 - Equação de conversão de freqüência em rpm para rad/s:
rad / s
30
rpm
Equação 2.2 - Equação linear de calibração tensão em função da velocidade:
V arad / s b
Equação 2.3 - Equação linear de calibração velocidade em função da tensão:
rad / s
V b
m.V c
a
Equações 3 - Equações para motor travado e corrente contínua constante:
Equação 3.1 - Equação de determinação da resistência
vA R iA
16
Universidade Federal
de
São Carlos
Equações 4 - Equações para motor travado em freqüência de corte:
Equação 4.1 - Equação de determinação da indutância:
X L 2 f L Rext
L
Rext
2 f corte
Equações 5 - Equações para motor em corrente contínua
Equação 5.1 – Equação de determinação da constante Ke
Se
di A
0 então
dt
vA R iA Ke
vg v A R iA K e
Ke
vA R iA
Equações 6 - Equações para motor em corrente contínua e velocidade angular continua
Equação 6.1 – Equação de determinação do Momento de Inércia Mecânico
Se
d
0 então
dt
A KT iA B F , sendo F o atrito seco
Equação 6.2 – Equação do Momento da Força de Atrito Estático
Fe KT I REPOUSO
Equações 7 - Equações para motor com torque nulo e velocidade angular não nula
Equação 7.1 – Equação diferencial do motor com torque nulo
17
Universidade Federal
de
São Carlos
J
d
B F
dt
Equação 7.2 – Resolução da Equação Diferencial (Equação 7.1)
t
(t ) 0 e
m
t
F
m
1 e
B
, sendo
J
m chamada de constante de tempo
B
mecânica do motor.
Cálculos
Calculo da Indutância L (uso da Equação 4.1):
560
560
L
2.8 10 3 H 2.8mH
3
3
2 31.5 x10
200 10
IX. REFERÊNCIAS BIBLIOGRÁFICAS
http://www.youtube.com/watch?v=AC8YRAxyZ7Q
http://en.wikipedia.org/wiki/Time_constant
http://www.siemens.com.br/templates/v2/templates/getDownload.axd?id=2910&type=FILES
http://www.tesequipamentos.com.br/arq/ma-ts-1100.pdf
http://www.ossrc.org.in/downloads/comparative-study-of-Matlab-and-Scilab.pdf
http://web.mit.edu/6.302/www/compare/report.html
www3.fsa.br/mecanica/arquivos/MEC442_Atividade_2007_2.pdf
http://www.engin.umich.edu/group/ctm/examples/motor/motor.html
W. Bolton; Engenharia de Controle; Makron Books do Brasil, 1995.
18