Sistema de Controle - APS 2
Data de Entrega: Dia da Prova
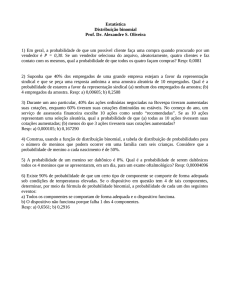
1. Sem o auxílio do Matlab, esboce o lugar das raízes das seguintes funções:
1
( s 2 1)
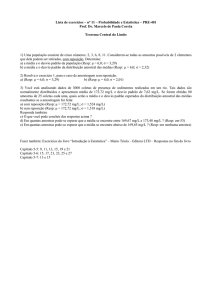
(a) G ( s )
(b) G ( s ) 2
( s 1)( s 2)
s ( s 4)
Resp:
Resp:
Root Locus
Root Locus
0.3
0.2
0.25
0.2
0.1
Imaginary Axis
Imaginary Axis
0.15
0
-0.1
0.1
0.05
0
-0.05
-0.2
-0.1
-0.15
-0.3
-2.2
-2
-1.8
-1.6
-1.4
-1.2
-1
-0.2
-0.8
-7
Real Axis
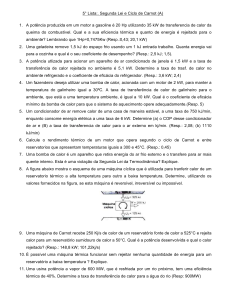
(c) G ( s )
( s 1)
( s 1)( s 3)
-5
-4
-3
-2
-1
0
1
0.01
0.015
Real Axis
( s 2 1)
(d) G ( s )
s2
Resp:
Root Locus
0.8
Resp:
-6
Root Locus
1
0.6
0.8
0.6
0.4
Imaginary Axis
Imaginary Axis
0.4
0.2
0
-0.2
0.2
0
-0.2
-0.4
-0.4
-0.6
-0.6
-0.8
-12
-0.8
-1
-10
-8
-6
-4
-2
0
2
Real Axis
-0.02
-0.015
-0.01
-0.005
0
0.005
Real Axis
( s 2 1)
s2
NP = 2 ...(0)
NZ = 2 ...(s + j).(s - j) = s^2 –js +js +1 raizes = +-j
Ângulos de saída = (2i+1)180/(NP-NZ) =
i = 0,+-1,=-2,etc...
d) G ( s )
C.G. = sum(polos)-sum(zeros)/(NP-Nz) = 0/0
Pontos de saida do eixo =
2. Dado uma relação de amortecimento de 0,707, projetar um controlador PI através do lugar das
raízes que force o erro do degrau a zero, adotar o zero do compensador Zc = 0,1 (livro do
Nise, cap. 9, pag: 408, Problema: 1).
>> s=tf('s')
Transfer function:
s
>> gs = 1/((s+3)*(s+6))
Transfer function:
1
-------------s^2 + 9 s + 18
gs_controlada = ((s+0.1)/s) *gs
Resp: Comp.
22.5( s 0,1)
s
3. Dado uma relação de amortecimento de 0,5, projetar um controlador PI através do lugar das
raízes que force o erro do degrau a zero, adotar o zero do compensador Zc = 0,1 (livro do Nise
(INGLÊS), cap. 9, pag: 572, Problema: 1).
>> gs = 1/((s+1)*(s+3)*(s+10))
Transfer function:
1
-----------------------s^3 + 14 s^2 + 43 s + 30
>> controlador = (s+0.1)/s
Transfer function:
s + 0.1
------s
>> sistema_controlado = controlador * gs
Transfer function:
s + 0.1
---------------------------s^4 + 14 s^3 + 43 s^2 + 30 s
>> rltool(sistema_controlado)
Resp: Comp.
73( s 0,1)
s
4. Dado uma ultrapassagem de 16%, projetar um controlador de atraso de fase através do lugar
das raízes que diminua o erro 20 vezes (livro do Nise, cap. 9, pag: 364, Problema: Exercício
de Avaliação 9.1).
OBS: No projeto do atraso de fase normalmente adota-se o valor de Pcomp entre 0,01 e 0,001. Para todos os exercícios e a avaliação
será suposto que este valor seja 0,01!
>> gs= 1/(s*(s+7))
Transfer function:
1
--------s^2 + 7 s
>> controlador_sem_ganho = (s+0.2)/(s+0.01)
Transfer function:
s + 0.2
-------s + 0.01
>> rltool(gs);
k_PO_16_percent = 45.84;
>> Kv_erro = k_PO_16_percent/7
Kv_erro =
6.55
Kv_Erro_compensado = Kv_erro*Zc/Pc
Kv_erro*20 = Kv_erro*Zc/0.01
PC = 0.01*20 = 0.2;
>> gs_ctr = gs*controlador_sem_ganho
Transfer function:
s + 0.2
----------------------s^3 + 7.01 s^2 + 0.07 s
>> rltool(gs_ctr)
44,64( s 0,2)
( s 0,1)
5. Dado uma ultrapassagem de 15%, projetar um controlador de avanço de fase através do lugar
das raízes que diminua o tempo de assentamento em 3 vezes (livro do Nise, cap. 9, pag: 375,
Problema: Exercício de Avaliação 9.2).
Resp: Comp.
OBS: Neste exercício e na avaliação será adotado o valor de Zc = 10!
>> s=tf('s');
>> gs = 1/(s*(s+7));
>> rltool(gs)
Adiciono requisito PO no root locus
Calculo o Ts(est.) pelo ponto real -3.5...-4/Ts = -3.5... logo Ts = 1.14 s
Novo Ts = Ts original/3 = 1.14/3...logo Ts novo = 0.38
Adiciono este requisito no Root Locus
Resp: Comp.
181(1 0.1s)
476,3( s 10)
ou Comp.
( s 25,52)
(1 0.039s)
6. Calcular Kp para uma ultrapassagem de 10%, depois projetar um controlador de atraso de fase
através do lugar das raízes com constante de erro igual a 4 (livro do Nise, cap. 9, pag: 408,
Problema: 3).
OBS: No projeto do atraso de fase normalmente adota-se o valor de Pcomp entre 0,1 e 0,01. Para todos os exercícios e a avaliação
será suposto que este valor seja 0,01!
>> s = tf('s');
>> gs = 1/((s+1)*(s+3)*(s+5));
kV_PO_10 = 20.1;(1*3*5) =1.34
Zc = 0.01*4;1.34 = 0.03
>> controlador_sem_ganho = (s+5.97)/(s+0.01);
>> rltool(controlador_sem_ganho*gs);
Resp: Comp.
20( s 0,03)
59.8(1 33s)
ou Comp.
( s 0,01)
(1 100s)
7. Sem o auxílio do Matlab, esboce o diagrama de Bode através das assíntotas das seguintes
funções:
2( s 1)
100( s 1)
(a) G( s )
(b) G ( s )
( s 10)
( s / 10 1) 2
Resp:
Resp:
8. Dado uma ultrapassagem de 15%, projetar um controlador de atraso de fase através da
resposta em frequência (Bode) com constante de erro Kv igual a 1000 (livro do Nise, cap. 11,
pag: 510, Problema: 6).
OBS: Na resposta do livro a uma diferença devido a soma de 10 graus ao invés de 5 grais para a margem de fase. Neste exercício e na
avaliação será adotado a fórmula:
1473( s / 0,121 1)
ou
( s / 0,0001604 1)
1.95( s 0,121)
ou
Comp.
( s 0,0001604)
1.473 * 0,001326 * ( s 0,121)
(resp. livro)
Comp.
( s 0,0001604)
Resp: Comp.
9. Projete um compensador avanço de fase através da resposta em frequência (Bode) para que o
sistema possua erro em regime permanente de 0,05 para uma entrada em rampa, e uma MF
mínima de 45°.
Resp:
ou
10. Dado uma ultrapassagem de 55% e um tempo de pico de 0,5 s para kV = 10, projetar um
controlador de avanço de fase através da resposta em frequência para reduzir o P.O. para 10%
com o mesmo Tp e erro (livro do Nise, cap. 11, pag: 510, Problema: 13).
Ou
>> s=tf('s')
Transfer function:
s
>> plnt = 1/(s*(s+5)*(s+20))
Transfer function:
1
-------------------s^3 + 25 s^2 + 100 s
>> rltool(plnt)
>> plnt_K = 1000/(s*(s+5)*(s+20))
Transfer function:
1000
-------------------s^3 + 25 s^2 + 100 s
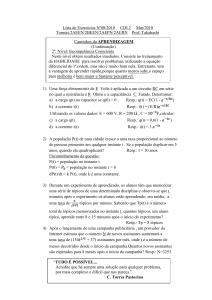
>> plant_original_feed = feedback(plnt_K,1)
Transfer function:
1000
--------------------------s^3 + 25 s^2 + 100 s + 1000
>> step(plant_original_feed)
Step Response
1.6
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
2.5
Time (sec)
3
3.5
4
4.5
>> sisotool(plnt_K)
Margem de fase sem compensador = 22,5 graus.
Cálculo da margem de fase desejada:
>> PO_des = 10; %PO desejado = 10 %
>> amortecimento_desejado = -log(PO_des/100)/sqrt(3.14^2+log(PO_des/100)^2)
amortecimento_desejado =
0.5914
>> margem_de_fase_desejada = atand(2*amortecimento_desejado/sqrt(2*(amortecimento_desejado^2)+sqrt(1+4*(amortecimento_desejado^4))))
margem_de_fase_desejada =
58.6063
>> margem_de_fase_final = (margem_de_fase_desejada-22.5)*1.1
margem_de_fase_final =
39.7169
>> plant_final = 1000*(4.42*0.048*s+1)/((0.048*s+1)*s*(s+5)*(s+20))
Transfer function:
212.2 s + 1000
-------------------------------------0.048 s^4 + 2.2 s^3 + 29.8 s^2 + 100 s
>> plant_final_feed = feedback(plant_final,1)
Transfer function:
212.2 s + 1000
----------------------------------------------0.048 s^4 + 2.2 s^3 + 29.8 s^2 + 312.2 s + 1000
>> step(plant_final_feed)
Step Response
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
>> alpha = (1+sind(margem_de_fase_final))/(1-sind(margem_de_fase_final))
alpha =
4.5401
>> w_max = -20*log10(sqrt(alpha))
w_max =
-6.5706
% logo a freq = 9.25 rad/s
>> T = 1/(9.25*sqrt(alpha))
T=
0.0507
>> plant_final = 1000*(4.56*0.05*s+1)/((0.05*s+1)*s*(s+5)*(s+20))
Transfer function:
228 s + 1000
-----------------------------------0.05 s^4 + 2.25 s^3 + 30 s^2 + 100 s
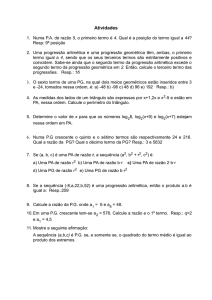
>> plant_final_feed = feedback(plant_final,1)
Transfer function:
228 s + 1000
------------------------------------------0.05 s^4 + 2.25 s^3 + 30 s^2 + 328 s + 1000
>> step(plant_final_feed)
Step Response
1.4
1.2
Amplitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
Resp:
(1000 * 4,56 * 0,05s 1)
ou
(0,05s 1)
Comp.
1000 *10,73 * ( s 3,51)
(resposta padrão do livro - O livro somou 20 graus na
( s 37,71)
equação da Margem de Fase final, porém estamos usando a fórmula:
Comp.
Max MFDesejada MFSemCompensador 1,1
Na avaliação serão aceitas ambas as técnicas)
11. Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em
amplitude e fase, da função G(s), representado na figura.
(a) Analisando-se o diagrama de Bode para estabelecer a condição de estabilidade dessa planta
em malha fechada com realimentação de saída, o sistema malha fechada será (PETROBRAS
2012):
( ) instável porque, na frequência em que a
amplitude cai 3 dB (meia potência), a fase é
aproximadamente −90º.
( ) instável porque, na frequência em que a fase
é −180º, a amplitude está acima de 0 dB.
( ) instável porque, em frequências muito altas, a
fase cai abaixo de −180º.
( ) estável porque a amplitude permanece
constante em baixas frequências.
( ) estável porque a amplitude tende a zero
quando a frequência tende ao infinito.
Resp: instável porque, na frequência em que a
fase é −180º, a amplitude está acima de 0 dB
(b) Com base na curva de amplitude, para que
valor do ganho K esse diagrama foi traçado?
Resp: 150 10
12. (PETROBRAS
2012):
Resp. (E) - Marginalmente estável se for
utilizado um controlador proporcional.
13.
Resp. T = 2, L = 3
PID: kp = 0,8 Ti = 6, Td = 1,5
14. É introduzido um ganho ajustável na
malha do sistema e, após algumas
tentativas,determina-se o ganho que faz
com que o sistema tenha oscilações
mantidas, Kcr = 4,00. e o período dessas
oscilações, Pcr = 6,3s. Determine os
parâmetros para um controlador PID:
Resp:
15. Encontre as margens de ganho e fase dos seguintes sistemas:
a)
b)
Resp: MG = 20 log(1/0,65)
MF = 15 graus
Res: MG: 25 dB MF: 67 graus
16.
17. Verifique se o sistema é observável e controlável:
d
(
0 x0 1
x0 ) 0,5
u
d ( x ) 0
0,2 x1 1
1
x0
y 1 0
x1
1 0,5
Resp: det(L) det
=0
0
0
O sistema não é observável!
1 0,5
det(crt.) det
1 0,2
O sistema é controlável!
18. Dado o sistema abaixo (livro do Nise (Inglês), cap. 12, pag: 553, Problema: 7).
20( s 2)
Comp.
s( s 4)( s 6)
Calcule a matriz de ganhos (k) do sistema para um tempo de estabelecimento de 2 segundo (Ts) e
um P.O. de 10%:
Resp: k1= 229, k 2 = 67.45, e k3 =14
Polos = +-2 e 8
19. Dado o sistema abaixo (livro do Nise, cap. 12, pag: 535, Exercício de Avaliação).
( s 6)
Comp.
( s 7)( s 8)( s 9)
Calcule a matriz do observador do sistema para um tempo de estabelecimento de 0,2 segundos
(Ts) e um P.O. de 20%:
Resp: