Elaboração do Segundo
Relatório
Controle de velocidade para um
motor cc
Laboratório de Sistemas de
Controle
Glaucia M. Bressan
Nov/2006
Capa
Unidade em que estuda
Disciplina e professora
Turma
Título do relatório
Identificação dos autores
Data
Sumário
Lista das seções e subseções para para
fácil acesso
Numerar seções e subseções
Numerar páginas do texto
Apêndice não deve ser numerado, mas,
sim paginado
Resumo
Visão condensada do relatório:
O que o relatório apresenta
Objetivos
Técnicas de medida
Um só parágrafo
Exemplo
Este relatório tem como objetivos principais estudar o
funcionamento do PWM (modulação por largura de pulso) no
controle de velocidade do motor, implementar um comparador
para realizar a realimentação de um motor CC juntamente
com um controlador proporcional e, finalmente, projetar e
implementar um controlador PI para zerar o erro em regime
permanente e para obter um tempo de acomodação
especificado para a resposta de velocidade do motor
modelado na primeira parte do curso.
1. Introdução
Apresentar o conteúdo e organização do
relatório
Contextualizar o assunto introduzindo
o sistema a malha fechada e ocontrolador PI
bem como o procedimento de projeto
utilizado
Equipamentos e ferramentas utilizadas
Multímetro digital, motor DC, osciloscópio
digital, módulo PWM, programas:
Origin,Matlab,Labview
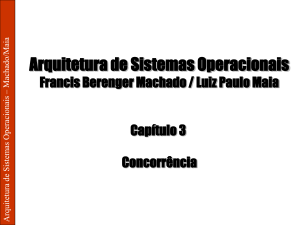
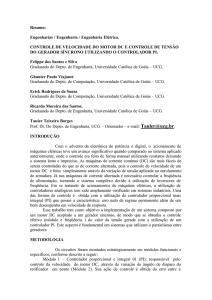
Diagrama de blocos do sistema de controle
Apresentar os componentes do
sistema de controle
PWM : Modulador de largura de pulso
Figura 1: Diagrama do sistema de controle.
2. Ensaios e Simulação da Resposta
2.1 Estágio de condicionamento de sinal
Apresentar o experimento de obtenção do
ganho do estágio de condicionamento de
sinal.
Indicar o valor obtido
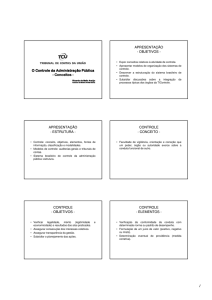
2.2 Diagramas de Simulação da resposta
Apresentar a FTMF
e a FTMA com um
controlador
proporcional,
inclusive diagramas
simulink
Y
Figura 2: Sistema a malha fechada
completo com controlador.
calcular os polos da
FTMF com C(s)=Kp
(Kp=1 e Kp máximo)
Figura 3: Sistema a malha aberta
completo com controlador.
2.3 Projeto do Controlador
Apresentar os passos do projeto do
controlador PI usando a ferramenta
rltool (Ogata, 1990)
Ki
C (s) K p
s
Ki (
C (s)
Kp s
Ki
s
1)
Função de transferência do
controlador
Função obtida
Polos e zeros
2.4 Implementação do controlador
Indicar circuito PI
R4 ( R4C1s 1)
C (s)
R3 R4C1s
R4
KP
R3
Informar os valores dos componentes
1
KI
R3C1
Implementação do controlador (Cont.)
Indicar a função de transferência com
valores de resistência e capacitância
utilizados
Calcular os polos e zeros
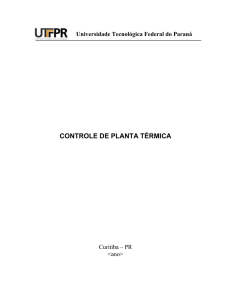
Comparar as respostas simulada e
experimental
Acrescentar gráfico do erro de regime
Velocidade rad/s
Gráfico das respostas
simuladas de velocidade
e erro de regime e as
experimentais obtidas
com o Labview,
indicando o desempenho
atingido
ATENÇÃO! Gráficos sem
fundo cinza!
100
90
80
70
60
50
40
30
20
10
0
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
3. Resultados
Indicar a FT malha fechada com controlador seus polos e
zeros e verificar se as especificações foram atendidas
FT malha fechada
339720 s + 2.83e007
FTMF(s) = -------------------------------------s^3 + 525.9 s^2 + 6.12e004 s + 2.599e006
Polos e zeros
p1 = - 384,22
p2 = -70,84 + 41,79i
z1 = - 83,30.
p3 = - 70,84 – 41,79i
tempo de acomodação ts(projeto) = 30 ms
tempo de acomodação ts(simulação) = 31 ms
tempo de acomodação obtido experimentalmente = 40 ms
4. Conclusões
Discussão dos resultados obtidos
Comentar sobre os experimentos
Não apresenta gráficos
Introdução + conclusões: percepção
global do trabalho
Apêndice
Suportes explicativos e ilustrativos para
consulta
Informações não essenciais para compreensão
da experiência, mas complementares
Exemplos de cálculos
Deduções teóricas
Rotinas do Matlab
Referências Bibliográficas
Listar no final do relatório as publicações
consultadas para elaboração do relatório
Devem ser citadas no texto
Sobrenome, iniciais do nome, título, volume,
editora, local, ano
Exemplo:
Ogata, K., “Modern Control Engeneering,” Prentice-Hall
International, Inc. 2a. Edição, Englewood Cliffs, N.J.,
1990.