Série: Processos Estocásticos
O Processo de Poisson
Disciplina: Métodos Matemáticos 1C
Dennis S. Poisson,
Sceaux, France
PROCESSO DE POISSON
1 - INTRODUÇÃO
2 - PROCESSO DE POISSON
3 - TEMPOS DE CHEGADA
4 - TEMPOS ENTRE CHEGADAS
5 - TEMPOS DE CHEGADA NÃO-ORDENADOS
6 - PROCESSO DE POISSON FILTRADO
7 - PARTICIONAMENTO ALEATÓRIO
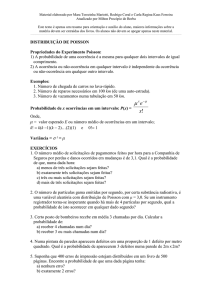
Processo de Contagem
Muitos fenômenos físicos são probabilisticamente descritos
pelo mesmo processo de formação de uma fila. Os clientes
chegam aleatoriamente e independentemente um do outro a
uma taxa normalmente constante de clientes/segundo.
N
N(0)=0
k
P1 =t
.
.
.
P+ de 1 em t = 0
4
3
t -> 0
2
1
t
Processo Aleatório de Contagem {Nt, 0 t+}
a. a variável aleatória de contagem Nt assume unicamente
valores inteiros não negativos e
N0 0
b. o processo aleatório de contagem {Nt, 0 t+} tem
estacionaridade e incrementos independentes.
c.
P[ N t t N t 1] t 0( t )
d.
P[ N t t N t 1] 0( t )
onde é uma constante positiva e onde 0(t) é uma função
de t a qual vai a zero mais rapidamente que t, i.é., onde
0(t) é uma função tal que
0( t )
lim
0
t 0 t
(1)
Um processo aleatório o qual satisfaz as hipóteses (a) a
(d) é chamado um Processo de Contagem de Poisson e,
como vamos mostrar, o número de eventos que ocorre
em um dado intervalo de tempo tem uma Distribuição de
Probabilidade de Poisson.
Das propriedades c e d tiramos que
P[ N t t N t 0] 1 P[ N t t N t 1]
1 ( P[ N t t N t 1] P[ N t t N t 1])
1 ( t 0( t ) 0( t ))
1 t 20( t )
P[ N t t N t 0] 1 t 0( t )
(2)
Vamos agora determinar a distribuição de probabilidade da
variável aleatória de contagem Nt. Consideremos o intervalo
(0,t+t] e dividamos ele em dois conforme figura abaixo:
t
0
t
t+t
Introduzimos a notação
pk (t ) P[ N t k ]
e
p j ,k (t , t t ) P[ N t t k | N t j ]
O evento condicional [Nt+t=k | Nt=j] é equivalente
ao evento [Nt+t - Nt = k-j] e então suas probabilidades são iguais,
P[ Nt t k | Nt j ] P[ Nt t Nt k j ]
Por hipótese, o processo de contagem tem incrementos
estacionários e então segue-se que
P[ N t t N t k j ] P[ N t N 0 k j ] P[ N t k j ]
As probabilidades de transição pj,k(t,t+t) dessa forma dependem
unicamente do intervalo de tempo t, e escrevemos então que
p j ,k ( t ) p j ,k (t , t t ) P[ N t k j ]
(3)
Consideremos a probabilidade de que nenhum evento ocorra no
intervalo (0,t+t]. Esta situação ocorre quando nenhum evento
ocorre no intervalo (0,t] e nem no (t,t+t].
Intervalos não sobrepostos => incrementos v.a’s independentes:
p0 (t t ) p0 (t ) p0,0 ( t )
(4)
Segue-se (2) e (3) que
p0,0 ( t ) 1 t 0( t )
Usando este resultado em (4), subtraindo p0(t) de ambos os
lados e dividindo por t, teremos
p0 (t t ) p0 (t )
0( t )
p0 (t ) p0 (t )
t
t
Passando o limite t 0, tem-se
dp0 ( t )
p0 ( t )
dt
como a equação diferencial para probabilidade de que nenhum
evento ocorra em um intervalo de duração t. Sua solução é,
p0 (t ) ce t
notando que
p0 (0) 1 c 1
segue-se
P[ N t 0] p0 (t ) e t
Tendo obtido p0(t) vamos determinar pk(t) para k 1.
Começando de N0=0, Nt+ t pode tornar-se igual a um inteiro k de
diversas formas: pode ser que não aconteça nenhum evento no
intervalo (0,t] e k eventos no (t,t+t]; pode acontecer um evento no
intervalo (0,t] e k-1 no (t,t+t]; etc. Dessa forma, podemos escrever
k
pk (t t ) p j (t ) p j ,k ( t )
j 0
pois são eventos mutuamente exclusivos.
(5)
Determinação de pk(t)
Passo A. Mostrar que
p j ,k ( t ) 0( t )
0 j k-2,
p j ,k ( t ) p j ,k (t , t t ) P[ N t t k | N t j ] P[ N t t N t k j ]
P[ N t k j ]
se 0 j k-2, então
k j 2 k j 1
Logo,
p j ,k ( t ) P[ N t 1] 0( t )
Passo B. Mostrar que
dpk (t )
pk (t ) pk 1 (t )
dt
Como vimos em (5)
k
pk (t t ) p j (t ) p j ,k ( t )
j 0
assim
k 2
pk (t t ) p j (t ) p j ,k (t ) pk 1 (t ) pk 1,k (t ) pk (t ) pk ,k (t )
j 0
Como vimos no Passo A.
p j ,k ( t ) 0( t )
0 j k-2,
assim
k 2
pk (t t ) 0(t ) p j (t ) pk 1 (t ) pk 1,k (t ) pk (t ) pk ,k (t )
j 0
Lembrando que
pk ,k ( t ) P[ N t k k 0] 1 t 0( t )
e que
pk 1,k ( t ) P[ N t k k 1 1] t 0( t )
teremos que
k 2
pk (t t ) 0(t ) p j (t ) pk 1 (t )t pk 1 (t )0(t )
j 0
pk (t ) pk (t )t pk (t )0(t )
Subtraindo pk(t) em ambos os lados, dividindo por t e
tomando o limite,
pk (t ) 0( t ) k 2
p j (t ) pk 1 (t )
pk (t t ) pk (t )
t j 0
t
lim
lim
t 0
t
0
t
0( t ) pk (t )
0( t )
pk 1 (t ) t t pk (t ) pk (t ) t
dpk (t )
pk (t ) pk 1 (t )
dt
Passo C.
Para k=1 temos que
dp1
p1 p0
dt
mas, como provado anteriormente
po e t
assim
dp1
dp1 t
t
p1 e
e e t p1
dt
dt
d
p1e t d p1e t dt
dt
p1 (t ) te t
K=2
dp2
p2 p1
dt
mas, como visto,
p1 (t ) te t
assim
dp2
dp2 t
2 t
p2 te
e e t p2 2 t
dt
dt
d
p2 e t 2 t d p2 e t 2 tdt
dt
(t ) t
p2 (t )
e
2
2
(idêntico)
K=3
dp3
p3 p2
dt
mas, como vimos
(t ) 2 t
p2 (t )
e
2
assim
3 2
dp3
(t ) 2 t
dp3 t
t
t
p3
e
e e p3
dt
2
dt
2
3 2
3 2
d
t
t
t
t
p3e
d p3e
dt
dt
2
2
(t ) t
p3 (t )
e
3!
3
Logo, por indução finita,
(t ) t
P[ N t k ]
e
k!
k
Portanto, a variável aleatória contínua Nt tem uma distribuição de
probabilidade de Poisson.
Pode-se mostrar que
E[Nt]=var[Nt]= t
PROCESSO DE POISSON
1 - INTRODUÇÃO
2 - PROCESSO DE POISSON
3 - TEMPOS DE CHEGADA
4 - TEMPOS ENTRE CHEGADAS
5 - TEMPOS DE CHEGADA NÃO-ORDENADOS
6 - PROCESSO DE POISSON FILTRADO
7 - PARTICIONAMENTO ALEATÓRIO
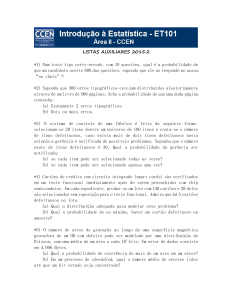
3- Tempos de Chegada
Freqüentemente é necessário se estudar o tempo requerido para que
um dado número de eventos k ocorra , assim como contar o número
de eventos que ocorrem em um dado intervalo de tempo t.
Chamaremos então o tempo de ocorrência tk do k-ésimo evento de
tempo de chegada do k-ésimo. Chamaremos a variável aleatória que
representa a distribuição dos possíveis valores dos tempos de
chegada de Tk.
N
k
.
.
.
4
3
N(t)
2
1
t1
t2
tk t
tk+1
t
Determinar a relação entre a função distribuição de probabilidade do tempo
de chegada do k-ésimo evento, Tk, e a variável aleatória de contagem Nt :
Por definição
FTk (t ) P[Tk t ]
O evento [Tk t] é equivalente a [Nt > k-1], e dessa forma têm a
mesma probabilidade. Assim:
[Tk t ] [ N t k 1]
P[Tk t ] P[ N t k 1] 1 P[ N t k 1]
Escrevendo o resultado acima em termos das correspondentes funções
distribuição de probabilidade, teremos que
FTk 1 FN t ( k 1)
(6)
Resultado válido para qualquer processo de contagem desde que
N0=0.
Vamos aplicar o resultado anterior ao caso do processo de contagem
de Poisson. Como visto
e t (t ) j
P[ N t j ]
j!
quando {Nt,0 t<+ } é um processo de contagem de Poisson.
Dessa forma, para k 1,
e t ( t ) j
FN t ( k 1) P[ N t j ]
j!
j 0
j 0
k 1
k 1
Usando o resultado (6), segue-se então que
j
(
t
)
FTk (t ) 1 e t
j!
j 0
k 1
0
para t 0
para t<0
PROCESSO DE POISSON
1 - INTRODUÇÃO
2 - PROCESSO DE POISSON
3 - TEMPOS DE CHEGADA
4 - TEMPOS ENTRE CHEGADAS
5 - TEMPOS DE CHEGADA NÃO-ORDENADOS
6 - PROCESSO DE POISSON FILTRADO
7 - PARTICIONAMENTO ALEATÓRIO
4- Tempos entre chegadas
Tendo considerado os tempos de chegada Tk de um um processo
de contagem aleatório {Ni, 0 t<+ }, vamos agora estudar algumas
das propriedades estatísticas dos intervalos entre sucessivos tempos
de chegada.
Chamaremos as durações destes intervalos Zk de intervalos entre
chegadas, onde
Z1 T1
Zk Tk Tk 1
z1
0
z2
t1 t2
,para k=2,3,4,...
zk
tk-1
tk
t
A seqüência de intervalos entre chegadas forma dessa forma um
processo aleatório de parâmetro discreto com variável aleatória
contínua {Zk, k=1,2,3,...}.
Vamos agora determinar a função distribuição de probabilidade do
K-ésimo intervalo entre chegadas, Zk, em termos da distribuição de
probabilidade da variável aleatória de contagem Nt.
Para isto vamos primeiro determinar a probabilidade
P[ Z k z] 1 P[ Z k z] 1 FZk (z)
Segue-se, da definição de intervalo entre chegadas, que o evento
[Zk>z] e [Tk - Tk-1>z] são equivalentes
[ Z k z] [Tk Tk 1 z] [Tk Tk 1 z ]
Suponha que o valor observado de Tk-1 é tk-1.
O evento [TK>Tk-1+z|Tk-1=tk-1] ocorre iff o processo de contagem
não incrementar durante o intervalo (tk-1,tk-1 + z]:
[Tk Tk 1 z| Tk 1 t k 1 ] [ N tk 1 z N tk 1 0]
Desde que os eventos são equivalentes, eles têm probabilidades iguais.
Obtemos então o resultado
P[ Zk z| Tk 1 t k 1 ] P[ N tk 1 z N tk 1 0]
Dessa forma, segue-se que
FZk ( z| Tk 1 t k 1 ] P[ N tk 1 z N tk 1 0]
(7)
Se o processo de contagem é estacionário, então segue-se que
a probabilidade no lado direito da equação anterior é uma função
unicamente de z; em particular,
P[ N tk 1 z N tk 1 0] P[ N z 0]
pois, por hipótese, N0 = 0.
A função distribuição condicional no lado esquerdo de (7) é dessa
forma independente do valor particular de k, e temos finalmente que
FZk ( z) 1 P[ N z 0]
para todo k=1,2,3,...
Como este resultado é independente do valor do índice k, segue-se que
se o processo de contagem é estacionário, então os vários intervalos
entre chegadas terão todos a mesma função distribuição de probabilidade.
PROCESSO DE POISSON [ Parte II ]
1 - INTRODUÇÃO
2 - PROCESSO DE POISSON
3 - TEMPOS DE CHEGADA
4 - TEMPOS ENTRE CHEGADAS
5 - TEMPOS DE CHEGADA NÃO-ORDENADOS
6- PROCESSO DE POISSON FILTRADO
7 - PARTICIONAMENTO ALEATÓRIO
5 - TEMPOS DE CHEGADA NÃO-ORDENADOS
1º Passo:
Suponha que exatamente k eventos de um processo de
Poisson ocorrem em um intervalo de duração t. Em outras
palavras Nt = k, onde Nt é uma variável aleatória de
Poisson. Se particionarmos (0,t] em M subintervalos
adjacentes para os instantes de tempo t’0, t’1, t’2,..., t’M,
considerando:
t 'o 0 e t 'M t
E definindo:
m t 'm t 'm1 para m 1,2,..., M
Temos a situação de partição representada a seguir:
m
0 t'o
t '1
t 'm1
( m )
t'm
t 'M t
Podemos escrever:
M
t m
m 1
Não há relação a priori entre os tempos em que os eventos
ocorrem (tk) e os instantes da partição t’m.
2º Passo:
Número de eventos que ocorrem em um subintervalo:
( m ) (t 'm1 , t 'm ] onde m 1,2,..., M
Segue que:
M
k
m 1
m
k
Exatamente k eventos ocorreram no intervalo (0,t].
A probabilidade condicional conjunta de km eventos
ocorrerem durante o intervalo (m), m = 1,2,..., M,
considerando a hipótese de que k eventos ocorrem durante
o intervalo inteiro é:
P[ N1 k1 , N 2 k 2 ,..., N M k M | N t k ]
P[ N1 k1 , N 2 k 2 ,..., N M k M , N t k ]
P[ N t k ]
P[ N1 k1 , N 2 k2 ,..., N M k M ]
P[ N t k ]
(1)
Incrementos estacionários e independentes, vem:
M
P[ N1 k1 , N 2 k 2 ,..., N M k M ] P[ N m k m ]
(2)
m 1
O número de eventos Distribuição de Poisson. Assim,
podemos reescrever (2) e o denominador de (1):
P[ N m
e m ( m ) km
km ]
km!
e
e t (t ) k
P[ N t k ]
k!
Levando os resultados acima em (1):
Obtemos a probabilidade condicional conjunta:
e m ( m ) km
km!
m 1
kM | Nt k ]
e t (t ) k
k!
M
P[ N1 k1 , N 2 k 2 ,..., N M
( m ) km
km!
m 1
tk
k!
M
e (1 2 ... M ) k1 k2 ... k M
e t
k
k! M ( m ) km
k
t m 1 k m !
3º Passo:
Particionamento suficientemente bom apenas um evento
ocorra em cada subintervalo. Nesse caso, cada um dos k
subintervalos terá apenas um evento ocorrendo em sua
duração, ou seja:
( m )
km
m
e
k m ! 1
Não ocorrerá nenhum evento em cada um dos M-k
subintervalos restantes:
( m )
km
1
0
m
e
k m ! 0! 1
P[ N1 k1 , N 2 k 2 ,..., N M
k! M ( m ) km
kM | Nt k ] k
t m 1 k m !
Reindexaremos os k subintervalos, de modo que o
subintervalo (j) contenha o j-ésimo evento a ocorrer.
O tempo de ocorrência do j-ésimo evento é o tempo de
chegada tj, ficamos apenas com a probabilidade condicional
conjunta de ocorrência dos eventos [tj (j)], j = 1, 2, ..., k:
k! k
P[t1 (1 ), t2 ( 2 ),..., tk ( k ) | Nt k ] k j (3)
t j 1
4º Passo:
k eventos ocorrem durante [0,t], o mesmo resultado pode
ser obtido assumindo que os tempos de chegada tj são as
estatísticas de ordem dos tempos de evento (ou tempos de
chegada não-ordenados).
Variáveis aleatórias mutuamente independentes
Uniformemente distribuída em [0,t]
Podemos
indexar
os
objetos
que
causam
eventos
particulares pelos inteiros 1, 2, ..., k e denotar como ui o
tempo de evento que o objeto i leva para que um evento de
interesse ocorra.
TEMPOS DE CHEGADA NÃO-ORDENADOS
Não garantia a priori que #i gere o i-ésimo evento a ocorrer
(em ordem) não garantia ui = ti.
Objetos
#1 #2
#i
#k
Tempos
de Evento
Tempos
de Chegada
u k u1
u2
0 t1
t2
ti t j
ui t
tk t
5º Passo:
Seja Uj a v.a. da distribuição dos valores dos ui empíricos,
dizemos que as v.a’s Ti são as estatísticas de ordem das
v.a’s Uj . Em seguida assumimos:
Variáveis aleatórias mutuamente independentes
Uniformemente distribuídas em [0,t]
Estamos assumindo que dado Nt = k, os Uj são
mutuamente independentes e:
1
,0 ui t
fU i (ui | N t k ) t
, i 1,2,..., k
0, caso contrário
Como os Uj são v.a’s independentes:
1
k
,0 ui t
fU1 ,U 2 ,..., U k (u1 , u2 ,..., uk | N t k ) t
, i 1,2,..., k
0, caso contrário
Existem k! diferentes conjuntos de tempos de eventos
[uj, i = 1, 2,..., k] que poderiam gerar um conjunto particular
de tempos de chegada. Daí:
k!
k
,0 t j t
fT1 ,T2 ,..., Tk (t1 , t 2 ,..., tk | N t k ) t
, j 1,2,..., k (4)
0, caso contrário
TEMPOS DE CHEGADA NÃO-ORDENADOS
Retornando aos k subintervalos (j) da eq.(3), a
probabilidade de um T1 cair em um subintervalo (1), de
duração 1 , que T2 caia num subintervalo (2), de duração
2 , e assim sucessivamente é dada pela f.d.p condicional
conjunta escrita em (4), ou seja:
P[T1 (1 ), T2 ( 2 ),..., Tk ( k ) | Nt k ]
(
K)
(
2)
( 1)
k!
k! k
dt1dt2 dtk k j
k
t
t j 1
Esse resultado é idêntico ao obtido em (3), completando
nossa prova.
Q.E.D
PROCESSO DE POISSON
1 - INTRODUÇÃO
2 - PROCESSO DE POISSON
3 - TEMPOS DE CHEGADA
4 - TEMPOS ENTRE CHEGADAS
5 - TEMPOS DE CHEGADA NÃO-ORDENADOS
6 - PROCESSO DE POISSON FILTRADO
7 - PARTICIONAMENTO ALEATÓRIO
6 - PROCESSO DE POISSON FILTRADO
Definição
Suponha que excitamos aleatoriamente um operador linear
com um processo de Poisson. Isto é, o processo aleatório
que descreve o fenômeno de interesse, [Xt , 0 t <+] pode
ser escrito:
Nt
X t h(t U j )
, onde
j 1
uj gera h(t- uj) em um tempo t
Nt descreve o nº de eventos que ocorreram em(0,t]
Uj são os TCNO dos eventos que ocorreram em(0,t]
Temos o chamado Processo de Poisson Filtrado.
PROCESSO DE POISSON FILTRADO
Valor Esperado de Xt :
E[ X t ] P[ N t k ]E[ X t | N t k ]
(1)
k 0
A média condicional E[Xt | Nt = k] é obtida tomando a média
da soma:
k
h(t U
j 1
j
)
com relação aos tempos de chegada não-ordenados
U1, U2, ..., Uk.
k
E[ X t | Nt k ] E h(t U j )
j 1
k
E[h(t U j )]
j 1
Resultados anteriores nos dão:
1
,0 u t
fU j (u | N t k ) t
, j 1,2,..., k
0, caso contrário
Ficando:
k
t
k
1
E[ X t | Nt k ] E[h(t U j )] h(t u j )du j
j 1
j 1 t 0
Fazendo u = t-uj :
t
k
E[ X t | Nt k ] h(u )du
t 0
(2)
Substituindo (2) em (1), chegamos à esperança de Xt :
1
E[ X t ] h(u )du P[ Nt k ]k h(u )du
t0
k 0
0
t
t
Q.E.D
PROCESSO DE POISSON FILTRADO
Distribuição de Xt :
Nt
ivX t
X t (v) E[e ] E exp iv h(t U j )
j 1
Analogamente:
X (v) P[ N t k ]E[eivX | N t k ]
t
t
k 0
Onde:
E[e
ivX t
k
| N t k ] E exp iv h(t U j )
j 1
E[eivX t
k ivh( t U j )
| N t k ] E e
j 1
k
E e
j 1
ivh( t U j )
1 ivh(u )
1 ivh(t u j )
e
du j e
du
j 1 t 0
t 0
t
k
t
Substituindo o resultado acima em:
X (v) P[ N t k ]E[eivX | N t k ]
t
t
k 0
k
PROCESSO DE POISSON FILTRADO
X (v )
t
k 0
e
t
k
(t ) 1 ivh(u )
1
t
ivh ( u )
du e e
du
e
k! t 0
k 0 k! 0
k
t
t
k
Relembrando a expansão da função exponencial em séries
de potências:
t
t
ivh ( u )
X t (v) e exp e
du
0
t ivh( u )
exp e
1 du
0
Q.E.D
PROCESSO DE POISSON
1 - INTRODUÇÃO
2 - PROCESSO DE POISSON
3 - TEMPOS DE CHEGADA
4 - TEMPOS ENTRE CHEGADAS
5 - TEMPOS DE CHEGADA NÃO-ORDENADOS
6 - PROCESSO DE POISSON FILTRADO
7 - PARTICIONAMENTO ALEATÓRIO
7- PARTICIONAMENTO ALEATÓRIO
Dado um Processo de Poisson Filtrado, [Xt , 0 t <+],
formamos um novo processo [Zt , 0 t <+] selecionando
aleatoriamente apenas alguns dos eventos básicos. Isto é,
se:
Nt
X t h(t U j )
j 1
Nt
, então
Z t Y j h(t U j )
j 1
Têm P[Yj =1] = p e P[Yj =0] = 1-p = q
Mutuamente independentes
Independentes dos Uj’s
O processo particionado é um Processo de Poisson Filtrado
com taxa p vezes a taxa do processo básico.
Valor Esperado do novo processo Zt :
E[ Z t ] P[ N t k ]E[ Z t | N t k ]
(1)
k 0
A esperança condicional E[Zt | Nt = k] é obtida tomando a
média de ambas as v.a’s U1, U2, ..., Uk e as v.a’s
Y1, Y2, ..., Yk.
k
E[ Z t | Nt k ] E Y j h(t U j )
j 1
k
E[Y j h(t U j )]
j 1
k
E[Zt | Nt k ] E[Y j h(t U j )]
j 1
k
E[Y j ]E[h(t U j )]
j 1
k
j 1
t
t
p
kp
h(t u j )du j h(u)du
t 0
t 0
Substituindo (2) em (1):
kp t
E[ Z t ] P[ N t k ] h(u )du
k 0
t 0
(2)
kp t
E[ Z t ] P[ N t k ] h(u )du
k 0
t 0
p
h(u)du kP[ Nt k ]
t 0
k 0
t
t
p h(u )du
0
Pelo resultado anterior E[Zt] = p E[Xt], ou seja, o valor
esperado depois do particionamento aleatório é
simplesmente p vezes o valor esperado antes do
particionamento.
Q.E.D

![E[N t ]](http://s1.studylibpt.com/store/data/001620829_1-a9f878b03f17fb3b7219af8fb12fca01-300x300.png)