XXVI COBENGE
2337
UM MODELO DE LABORATÓRIO DE SISTEMAS
DE CONTROLE
Basilio, João Carlos, E.E., M.Sc. Ph.D.
Universidade Federal do Rio de Janeiro
Escola de Engenharia - Depto. de Eletrotécnica
Cidade Universitária - Ilha do Fundão
21.945-970 - Rio de Janeiro - R.J.
E-mail: [email protected]
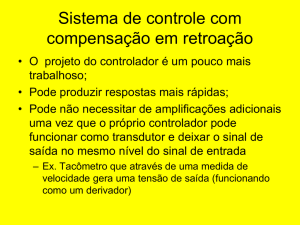
RESUMO - Num curso introdutório de sistemas de controle são
apresentados conceitos novos como funções de transferências,
especificação da resposta transitória resposta em freqüência,
estabilidade e realimentação. Como esses conceitos são
apresentados na forma de blocos independentes, o aluno, ao
final do curso, em geral não possui um conhecimento global da
área de controle, nem sequer dos passos necessários para se
chegar a um controlador. É sabido que o projeto de um sistema
de
controle
compreende
as
seguintes
etapas:
modelagem/identifi-cação do sistema a ser controlado, projeto
de um controlador que satisfaça as especificações de
desempenho e estabilidade relativa, simulação utilizando
computadores digitais e implementação do controlador no
sistema real. O modelo de laboratório aqui proposto abrange
todas essas etapas e, além de dar uma visão global da
disciplina, tem a vantagem de propiciar que os alunos
visualizem, na prática, conceitos que muitas vezes lhes parecem
2338
abstratos, tais como: diferentes funções de transferências para
um mesmo sistema físico, sensibilidade a variações de
parâmetros, ruídos e perturbações externas.
1 INTRODUÇÃO
Num curso introdutório de Sistemas de Controle são apresentados
conceitos novos tais como funções de transferências, especificações de
desempenho, sensibilidade em relação à variação de parâmetros do
sistema, ruídos e perturbações externas, estabilidade e realimentação. Um
laboratório de Sistemas de Controle ministrado simultaneamente à
disciplina teórica serviria para ilustrar os conceitos apresentados na
disciplina teórica, porém seu escopo, em termos de um projeto global de
um sistema de controle ficaria seriamente comprometido.
va(t)
o
Motor CC
Gerador CC
Tacômetro
o
o
vt(t)
o
o
o
ig(t)
Figura 1: Representação esquemática do grupo motor-gerador
Um projeto de um sistema de controle compreende, de uma
maneira geral, as seguintes etapas: modelagem/identificação do sistema a
ser controlado, projeto de controladores que satisfaçam as especificações
de desempenho e estabilidade relativa exigidas, simulação utilizando
computadores digitais e implementação do controlador no sistema real.
No modelo de laboratório de sistemas de controle aqui proposto, todas
essas etapas são consideradas. A planta adotada é um grupo motorgerador, representado esquematicamente na figura 1, onde va(t)
representa a tensão nos terminais da armadura do motor, vt(t) a tensão
nos terminais do tacômetro (proporcional à velocidade angular do
motor/gerador) e ig(t) denota a corrente fornecida pelo gerador quando
uma carga é conectada aos seus terminais.
XXVI COBENGE
2339
Assim como na prática, também aqui o aluno fará uso recursos
computacionais tais como o MATLAB e o SIMULINK. O SIMULINK
será usado na validação da identificação do sistema e para a análise do
desempenho do sistema após a introdução do controlador, enquanto o
MATLAB é utilizado como ferramenta auxilar de projeto. Essas duas
ferramentas são fundamentais para um bom rendimento dos alunos no
laboratório. Assim sendo, quando os alunos não são familiares com essas
linguagens, devem ser reservadas algumas seções para o seu ensino.
Este artigo está estruturado da seguinte forma: na seção 2 será
feita a formulação do problema de controle e, em seguida, será
apresentado um modelo matemático que descreve o grupo motor-gerador;
na seção 3 serão descritas as etapas para a identificação do sistema; a
seção 4 trata do projeto de um controlador que satisfaça as exigências
impostas na seção 2 e finalmente, na seção 5, será considerada a
implementação do controlador no sistema real.
2
FORMULAÇÃO DO PROBLEMA DE CONTROLE E MODELAGEM DO SISTEMA
Ao se formular um problema de controle, o primeiro passo é a
definição da grandeza a ser controlada. Em nosso caso, a grandeza
escolhida será a velocidade angular do gerador. A motivação para essa
escolha reside no fato de que, na geração de tensões alternadas senoidais,
a freqüência angular deve ser mantida dentro de um intervalo bastante
rígido. Como a freqüência angular é proporcional à velocidade angular
do motor, o controle da velocidade angular do gerador surge como um
objetivo claro de projeto. De uma forma mais detalhada, o problema a ser
perseguido aqui pode ser enunciado da seguinte forma: projete um
controlador de tal sorte que o sistema realimentado (i) seja estável; (ii)
tenha erro de regime permanente nulo para uma determinada velocidade
de referência; (iii) rejeite assintoticamente (para valores infinitamente
grandes do tempo) perturbações que, no sistema em estudo, são
decorrentes da introdução de cargas nos terminais do gerador − isto se
deve ao fato de que tais cargas, ao demandarem corrente do gerador,
aumentam o torque resistivo no eixo do motor, fazendo com que a
2340
velocidade de rotação do grupo motor-gerador tenda a diminuir; (iv)
tenha um desempenho transitório pelo menos equivalente ao sistema sem
compensação e (v) seja imune a variações nos parâmetros do grupo
motor-gerado ou a erros de identificação dos parâmetros da sua função
de transferência.
Uma vez definidos os objetivos de controle, o passo seguinte é a
modelagem do sistema. A partir do esquema da figura 2, observa-se que,
para tanto, basta fazer a modelagem de um motor CC controlado pela
armadura. A influência do gerador no modelo do motor será levada em
conta conta pelo aparecimento de um torque de perturbação resultante da
introdução de cargas de natureza elétrica nos terminais do gerador e pelo
maior momento de inércia
Ra
La
Rg
Lg
va(t)
vt(t)o passoig(t)
Uma vez definidos os objetivos de controle,
seguinte é a
R
Tacômetro
Motor
Gerador
Figura 2: Circuito equivalente para o sistema motor-gerador-tacômetro
O modelo matemático do motor CC será desenvolvido a partir do
circuito equivalente da figura 3, onde ia(t) e va(t) denotam, respectivamente, a corrente e a tensão de armadura, ω(t) é a velocidade angular do
motor e J e f são o momento de inércia da carga e o coeficiente de atrito
nos mancais, respectivamente. Pode-se demonstrar [1] que:
XXVI COBENGE
W ( s) =
2341
Ka
Kd
Va ( s) −
T ( s)
τs +1
τs +1 d
(1)
onde td(t) representa o torque de perturbação, Ka e Kd são constantes que
levam em conta os conjugados elétrico e mecânico do motor, a
resistência de armadura e a fricção nos mancais e 1/τ representa a
constante de tempo do sistema, que é função do momento de inércia da
carga e também das mesmas grandezas que influenciam as constantes Ka
e Kd.
Note ainda que, como t d (t ) = Ki g (t), e inserindo-se o tacômetro
no sistema, tem-se que a função de transferência que relaciona vt(t), va(t)
e ig(t) é dada por:
K g Kt
Ka Kt
Vt ( s) =
V ( s) −
I ( s)
τs+1 a
τs +1 g
(2)
que pode ser representada pelo diagrama de blocos da figura 4.
ia(t)
Ra
La
ω(t)
Rf
va(t)
Vf
J
Lf
f
If (constante)
Figura 3: Circuito equivalente de um motor CC controlado pela armadura
2342
3 IDENTIFICAÇÃO DOS PARÂMETROS Ka, Kt, Kg E τ
Uma vez que se dispõe do modelo matemático da planta, o
próximo passo é a identificação dos ganhos Ka, Kt e Kg e da constante de
tempo τ.
Ig(s)
Kg
_
Va(s)
1
τs + 1
Ka
Vt(s)
Wa(s)
Kt
Figura 4: Diagrama de blocos para o grupo motor-gerador
3.1 IDENTIFICAÇÃO DE Ka E Kt
Inicialmente, assuma ig(t) = 0 (A), isto é, não há carga alguma
conectada nos terminais do gerador e suponha que seja aplicado um sinal
de tensão constante Va (V) nos terminais do motor. Portanto, Va(s)=Va/s e
a equação (2) se torna:
Vt ( s) =
K a K t Va
.
τs +1 s
(3)
Não é difícil verificar que, em estado permanente, vt(t) = Vt = KaKtVa, o
que mostra que quando uma tensão de valor constante é aplicada a um
motor CC, a tensão em regime permanente nos terminais do tacômetro
acoplado ao eixo desse motor será proporcional ao valor da tensão
aplicada. Note, ainda, que vt(t) = Ktω(t) e, portanto, em estado
permanente, para a mesma entrada Va, ω(t) = W = KaVa e Vt = KtW. Isto
sugere o seguinte procedimento para a identificação dos ganhos Ka e Kt:
Algoritmo 1:
XXVI COBENGE
2343
1. Excita-se o motor com tensões constantes e iguais a Va1,Va2,...,Van,
medindo-se os valores correspondentes de tensão nos terminais do
tacômetro, Vt1,Vt2,...,Vtn, e as respectivas rotações angulares no eixo do
motor, W1,W2,...,Wn.
2. Forme os seguintes grupos de pares cartesianos: (i) (Va1,Vt1), (Va2,Vt2),
,...,(Van,Vtn); (ii) (Va1,W1), (Va2,W2),...,(Van,Wn); (iii) (W1,Vt1), (W2,Vt2),
,...,(Wn,Vtn);
3. Os valores de KaKt, Ka e Kt podem ser obtidos utilizando-se o método
dos mínimos quadrados para ajustar os coeficientes das retas (i) Vt =
KaKtVa,; (ii) W = KaVa e (iii) Vt = KtW aos pares ordenados obtidos em
2(i),(ii),(iii).
3.2 IDENTIFICAÇÃO DE Kg
Para a identificação de Kg, suponha que seja conectada uma
carga resistiva nos terminais do gerador. Isto fará com que circule uma
corrente contínua de valor Ig, que é função da tensão aplicada nos
terminais do motor, conforme mostra a equação seguinte:
K a K t Va K g K t I g
Vt ( s) =
−
τs +1 s τs +1 s
(5)
de onde se pode concluir que o valor de estado permanente de vt(t) após a
introdução da carga será Vtg = Vt - KgKtIg, onde Vt = KaKtVa é o valor da
tensão nos terminais do tacômetro para uma entrada igual a um degrau de
amplitude Va, quando não há cargas conectadas ao gerador. Definindo-se
Vt’ = Vt - Vtg, tem-se que Vt’ = KgKtIg. A identificação de Kg pode ser
feita de acordo com o seguinte algoritmo.
Algoritmo 2:
Inicialmente, sem carga alguma conectada aos terminais do
gerador, aplica-se ao motor CC uma tensão igual a Va1 (V) e medese a tensão resultante nos terminais do tacômetro Vt1 (V).
2344
1. Mantendo a mesma tensão aplicada ao motor, conecte um carga
resistiva ao gerador e meça a corrente fornecida pelo gerador, Ig1 (A),
e a tensão nos terminais do tacômetro, Vtg1 (V).
2. Defina Vt1’ = Vt1 - Vtg1 e forme o par ordenado (Ig1,Vt1’).
3. Repita os passos 1 a 3 acima para outros valores de Va, obtendo, ao
final, os pares ordenados (Ig1,Vt1’), (Ig2,Vt2’),..., (Ign,Vtn’).
4. Utilize o método dos mínimos quadrados para ajustar o coeficiente
angular KgKt da reta Vt’ = KgKtIg aos pontos obtidos no passo 4.
Observação: Na identificação de Ka, Kt e Kg utiliza-se o método dos
mínimos quadrados para determinar o coeficiente angular de uma reta
que passa pela origem. Este problema pode ser formulado da seguinte
maneira: sejam n-pares cartesianos (x1,y1), (x2,y2),..., (xn,yn) e considere o
problema de se ajustar o coeficiente angular (α) da reta y = αx tal que a
soma dos quadrados das diferenças entre as ordenadas y1,y2,...,yn e αx1,
αx2,..., αxn seja mínima. Seja yt = [ y1 y2 ... yn ] e xt = [ x1 x2 ... xn ] e
assuma que . 2 denota norma euclideana de um vetor, então ferramentas
elementares de cálculo diferencial e álgebra linear permitem escrever:
α=
yt x
x
2
(6)
2
3.3 IDENTIFICAÇÃO DE τ
Considere novamente o gerador em vazio, isto é, assuma que não
há carga alguma conectada nos seus terminais. Desta forma, tem-se que
ig(t) = 0 e a função de transferência (2) torna-se:
G (s) =
Vt ( s ) K a K t
=
.
Va ( s ) τs + 1
(7)
XXVI COBENGE
2345
A constante de tempo τ pode, então, ser identificada a partir do diagrama
de módulo de Bode, uma vez que, para freqüências muito menores que
1/τ rd, |G(jω)|dB = 20 log(KaKt), que corresponde à assíntota de baixa
freqüencia e para freqüências muito maiores que 1/τ rd, tem-se que
|G(jω)|dB = 20 log(KaKt/τ) - log ω. As duas assíntotas se encontram em ω
= 1/τ rd, sendo esta, portanto, a freqüência de canto. Como Ka e Kt foram
determinados na seção 3.1, a constante de tempo τ pode ser determinada
a partir de um experimento de resposta em freqüência de acordo com o
seguinte algoritmo:
Algoritmo 3:
1. Excite o motor com tensões senoidais de amplitude Vai (V) e
freqüências fi medindo-se a correspondente tensão de saída Vti (V).
2. Construa, utilizando a função semilogx do MATLAB, o diagrama
de módulo de Bode para o sistema, com os pontos cujas coordenadas
são (ω,,20log Vti/Vai), onde ωi = 2π fi. Em seguida, despreze os pontos
que são discrepantes.
3. Represente, no mesmo gráfico obtido ao final do passo 2, a assíntota
de baixa freqüência utilizando os valores de Ka e Kt obtidos na seção
3.1. Essa assíntota deve iniciar numa freqüência pelo menos uma
década abaixo da menor freqüência utilizada em 1
4. Utilizando a função polyfit do MATLAB ajuste os pontos
representados no gráfico obtido ao final do passo 2 por um polinômio
p(ω) cujo grau será definido da seguinte forma:
4.1 Defina um vetor ϖ contendo freqüências, espaçadas logaritmicamente, iniciando-se pelo menos uma década antes da menor
freqüência utilizada no passo 1 e terminado aproximadamente na
maior freqüência utilizada em 1.
2346
4.2 Calcule p(ϖ) para cada freqüência definida em 4.1 e, em seguida,
represente no gráfico obtido ao final do passo 3 os pontos de
coordenadas (ϖi , p(ϖi)). Se a curva ajustada for aproximadamente
tangente à assíntota de baixa freqüência e passar próxima aos pontos
representados no passo 2, então , p(ϖi), i = 1,...,k, onde k denota a
dimensão do vetor ϖ, representa uma boa aproximação para o
diagrama de módulo de Bode da equação (7). Caso contrário, escolha
um novo grau para p(ϖ) e repita este passo.
5. Determine os dois pontos do vetor ϖ para os quais p(ϖ) é,
respectivamente, maior ou igual e menor ou igual a 20 log|KaKt| - 3,
e os correspondentes valores de p(ϖ). Em seguida, utilize
interpolação linear para encontrar a freqüência ωc para a qual
|G(jωc)|dB = 20 log|KaKt| - 3. A constante de tempo τ será igual a
1/ωc.
4 PROJETO DO CONTROLADOR
Tendo sido obtido um modelo matemático para o grupo motorgerador, o passo seguinte é o projeto de um controlador que satisfaça as
seguintes exigências:
1. Estabilidade;
2. Erro de regime permanente nulo, i.e., para uma dada tensão de
referência v r(t) (V) (equivalente à velocidade angular desejada), a tensão
nos terminais do tacômetro vt(t) deve ser, em regime permanente, igual à
tensão de referência;
3. Baixa sensibilidade à variação dos parâmetros no modelo, que
no presente caso se deve a erros de identificação de Ka , Kt, Kg e τ.
4. Rejeição assintótica à perturbação, i.e., para uma carga
inserida nos terminais do gerador, a tensão nos terminais do tacômetro
deve, em regime permanente voltar a ser igual à da tensão de referência.
XXVI COBENGE
2347
5. Desempenho transitório satisfatório. Como se trata de uma
plantadidática o desempenho do sistema será definido unicamente em
termos do tempo de acomodação do sistema em malha aberta.
Como o objetivo aqui é controlar a velocidade de rotação do
motor, isto é, mantê-la em um determinado valor, é natural considerar
como sinal de referência o degrau, i.e.:
V (V), t ≥ 0
v r (t) = r
0, t < 0
(8)
Como forma de ilustrar os benefícios da realimentação, iremos
inicialmen-te considerar a possibilidade de usar um controle em malha
aberta para, em seguida, introduzir a realimentação.
4.1 SISTEMA DE CONTROLE EM MALHA ABERTA
A partir da equação (2) vê-se que o sistema em estudo é estável
e, portanto, poder-se-ia considerar a possibilidade de se fazer um
controle em malha aberta. Para tanto, considere o diagrama de blocos da
figura 5, onde K(s) representa a função de transferência do controlador a
ser projetado. Como, por simplicidade, foi adotado como satisfatório o
tempo de acomodação do sistema sem compensação, pode ser adotado
um controlador estático, isto é:
K(s) = K
(9)
onde K será determinado de tal forma que, em regime permanente vt(t) =
Vr (V) (assumindo, inicialmente que não há carga conectada nos
terminais do gerador). É fácil verificar que K=1/(Ka Kt) leva o sistema a
um erro de regime permanente nulo.
2348
Ig(s
Kg
Vr(s)
K(s)
Va(s)
_
Ka
+
1
τs + 1
Kt
Vt(s
Figura 5: Diagrama de blocos para o controle em malha aberta
O passo seguinte é fazer a análise do desempenho do sistema
compensado, utilizando o SIMULINK. Para tanto, deve-se inicialmente
construir um modelo, em SIMULINK, do diagrama de blocos da figura 5
e, em seguida, proceder ao seguinte exercício de simulação com o
objetivo de verificar se as exigências de desempenho 2 a 4 serão
satisfeitos:
1. Para uma corrente ig(t) = 0 (A), aplica-se um degrau de
amplitude igual a Vr (V) com início em t = 0s. Os alunos verificarão que,
de fato, o objetivo de erro de regime permanente foi atingido. Em
seguida, registre o valor do tempo de acomodação (ts) da resposta.
3. Suponha que tenha havido um erro de 10% na identificação de
Ka. Em seguida, ainda com ig(t) = 0 (A), aplica-se um degrau de
amplitude igual a Vr (V) com início em t = 0s. Os alunos terão, agora, a
oportunidade de verificar que há um erro de regime permanente e,
portanto, o controlador proposto não mais se mostra eficiente.
4. Finalmente, aplique simultaneamente as entradas vr(t) e ig(t),
sendo ambas iguais ao degrau, com amplitudes, respectivamente, iguais a
Vr (V) e Ig (A), e inícios em t = 0s e t=to(s), onde to é um instante
superior ao tempo de acomodação. Os alunos mais um vez verificarão
que haverá um erro entre a tensão de referência e aquela nos terminais do
tacômetro.
XXVI COBENGE
2349
4.2 SISTEMA DE CONTROLE EM MALHA FECHADA
A realimentação surge, então, como única alternativa para se
superar as deficiências do controlador em malha aberta. Considere,
portanto o diagrama de blocos da figura 6.
Ig(s)
Kg
Vr(s)
+
_
K(s)
Va(s)
_
K
+
1
τs + 1
K
Vt(s)
Figura 6: Diagrama de blocos para o controle em malha fechada
O primeiro passo é definir uma estrutura para o controlador K(s).
Para tanto, considere o seguinte resultado:
Teorema 1: Considere um sistema realimentado (realimentação
negativa) cujo sinal de perturbação atua na entrada da planta. Sejam G(s)
= nG(s)/dG(s) e K(s) = nK(s)/dK(s) as funções de transferências da planta e
do controlador, respectivamente, e R(s)=α(s)/β (s) e D(s) = γ(s)/δ(s) as
transformadas de Laplace dos sinais de referência e de perturbação.
Suponha ainda que K(s) estabiliza o sistema.
(i) Assumindo d(t)=0 então lim e(t ) = 0 se e somente dG(s)dK(s)
t →∞
+
= x(s)β (s), onde e(t) = r(t) - y(t), β (s) é um polinômio cujos zeros são
os zeros de β (s) com parte real positiva ou nula e x(s) um polinômio
qualquer.
+
(ii) Assumindo agora que d(t) ≠ 0, então lim y (t ) = lim r (t ) ,
t →∞
t →∞
2350
isto é, o sistema rejeita assintoticamente o sinal de perturbação d(t) se e
somente se nG(s)dK(s) = p(s)δ+(s), onde δ+(s) é um polinômio cujos zeros
são os zeros de δ (s) com parte real positiva ou nula e p(s) um polinômio
qualquer.
Prova: Ver [2].
O teorema acima mostra que para que um sinal possa ser
rastreado (rejeitado) então os zeros do polinômio do denominador da
transformada de Laplace do sinal a ser rastreado (rejeitado) com parte
real positiva ou nula devem ser pólos do controlador ou da planta (pólos
do controlador ou zeros da planta). No presente caso, tanto o sinal de
referência como o de perturbação são degraus e portanto β +(s)=δ+(s)=s.
Assim sendo o controlador deve ter ação integradora, i.e.,
K ( s) =
K (s)
s
(10)
onde K (s ) será determinada para que o sistema realimentado seja
estável.
Vamos inicialmente considerar um controlador integral puro, isto
é, seja K ( s ) = K . O diagrama do lugar das raízes para esse é dado na
figura 7. Note que, o sistema realimentado será estável para todo valor de
K maior que zero. Assim sendo, a escolha de K será feita com base no
desempenho transitório do sistema. Com isso em mente, são calculados
valores para K de tal sorte que o sistema realimentado será (i)
criticamente amortecido e; (ii) sub-amortecido com percentual de
ultapassagem menor que 5%. Em seguida, constrói-se um modelo em
SIMULINK equivalente ao diagrama de blocos da figura 6. Observa-se
que:
XXVI COBENGE
2351
Im(p)
X
-1/τ
X
Re(p)
Figura 7: Lugar das raízes para K(s)=K /s
1. O tempo de acomodação da resposta o aluno verificará que o
desempenho transitório do sistema realimentado é pior que o do sistema
em malha aberta tanto para a condição de sub-amortecido quanto para
criticamente amortecido.
2. Mesmo para um erro de 10% em Ka, o erro de estado
permanente continua igual a zero.
3. O sistema realimentado foi capaz de rejeitar a
perturbação.
Observe que o tempo de acomodação para o sistema em
malha aberta é menor que o de malha fechada. Isto se deve ao fato
de que, o sistema em malha aberta é de 1ª ordem, cuja constante de
tempo é τ; o que implica que ts=4τ . Para o sistema realimentado com
controlador integral puro, os pólos do sistema têm parte real igual a -1/2τ
, o que implica que ts ≅ 8τ.
Assim sendo, para que o desempenho seja aproximadamente
igual ao do sistema em malha aberta, tais pólos devem ter parte real
aproximadamente igual a -1/τ. Isto implica que o diagrama do lugar das
raízes deve se deslocar para a esquerda e, para tanto, é necessário que
exista um zero -z à esquerda de -1/τ. Portanto, K(s) deve ter a seguinte
forma:
2352
K ( s) =
K P (s + z)
K
= KP + I
s
s
(11)
onde KI = KPz. Note pela equação acima que a introdução do zero no
controlador equivale a dotar o controlador de ação proporcional. É fácil
verificar para KP =1/(KaKt), os pólos do sistema realimentado terão parte
real igual a -1/τ. Note ainda que a escolha de z ditará a ultrapassagem da
resposta, isto é, qual mais próximo de 1/τ estiver z, menor será o
percentual de ultrapassagem. Substituindo-se, então a função de
transferência (12) no modelo do SIMULINK, obtém-se que o tempo de
acomodação da resposta ao degrau será aproximadamente 4τ (s).
Finalmente, observe que o procedimento acima permite, inclusive, obter
um tempo de acomodação menor, bastando para isso aumentar KP.
5 IMPLEMENTAÇÃO
Uma vez obtida a função de transferência para o controlador, o
passo final é a implementação do controlador. Como se trata de um
laboratório para um primeiro curso de Sistemas de Controle, são
utilizados controladores analógicos.
A implementação de sistema de controle, nada mais é do que a
construção de circuitos analógicos do comparador e do controlador, do
sistema realimentado mostrado na figura 6. Tais circuitos são mais
facilmente projetados utilizando-se amplificadores operacionais, por
exemplo, 741 ou LF356 (os últimos são preferíveis por serem
construídos com transistores de efeito de campo e, por essa razão têm
maior impedância de entrada).
XXVI COBENGE
2353
5.1 IMPLEMENTAÇÃO DO COMPARADOR
O circuito para o comparador está representado na figura 8. Note
que, para esse circuito tem-se que:
e(t) = vtr(t) - vt(t).
(12)
Quando de sua implementação, a equação (12) não será, em
geral, verificada, uma vez que os valores dos resistores não são
exatamente iguais. Para se superar este problema, devem ser ligados
potenciômetros em série com os resistores, que serão ajustados de tal
forma que a equação (12) possa ser verificada (a menos do "offset"
característico do amplificador operacional). O ajuste é feito da seguinte
forma: (1) aplica-se o mesmo sinal de tensão a ambos os terminais (vt(t)
e vtr(t)) e; (2) ajusta-se os potenciômetros até que a amplitude da tensão
de saída seja aproximadamente igual ao "offset" do amplificador:
v (t)
vtr(t)
e(t)
Figura 8: Circuito elétrico para a implementação do comparador
2354
5.2 IMPLEMENTAÇÃO DO CONTROLADOR
Um circuito para um controlador PID (proporcional + integral +
derivativo) está representado na figura 9, onde:
Vc ( s )
K
= − ( K P + I + K D s)
s
E (s)
(13)
KP = Ci/Cf + Rf/Ri, KI = 1/(RiCf) e KD = RfCi. Note que, como o
controlador projetado na seção 4.2 é do tipo PI, então, o termo KP deve
ser feito igual a zero, o que é conseguido fazendo-se Rf ≅ 0. Em seguida,
escolhe-se de Ri, Ci e Cf são calculados de forma a que a o circuito da
figura 9 tenha uma mesma função de transferência do controlador
projetado o mais próxima possível daquela obtida em (11). Podemos
salientar os seguintes fatos:
1. Além das ações proporcional e integral, o circuito tem ainda
ação inversora, conforme pode ser visto a partir da equação (14);
2. O circuito compõem-se ainda de um amplificador de potência;
Rf
C
Ri
e(t)
Ci
v (t)
v (t)
Figura 9: Circuito elétrico para o controlador-amplificador de potência
Para solucionar o problema introduzido pela inversão, dois caminhos
podem ser seguidos: (i) se o amplificador de potência for também um
inversor, então o problema está resolvido; (ii) caso contrário, inverte-se
as posições das entradas vt(t) e vtr(t) no circuito comparador da figura 8.
XXVI COBENGE
2355
6 CONCLUSÃO
Neste artigo foi apresentado um modelo de laboratório para um
primeiro curso de Sistemas de Controle. Devido ao fato de se basear num
projeto, o laboratório proposto tem as seguintes vantagens: (i) faz uso de
todos os conceitos apresentados na disciplina teórica, solidificando,
portanto, tais conceitos; (ii) dota o aluno de conhecimentos suficientes
para desenvolver projetos de sistemas de controle.
AGRADECIMENTOS
Este trabalho foi parcialmente financiado pelo CNPq (projeto de
pesquisa no. 352810/96-3).
REFERÊNCIAS
[1] Dorf, R. C., Modern Control Systems. Addison-Wesley, Reading,
MA, USA, 1986.
[2] Basilio, J. C., Laboratório de Sistemas de Controle I. Editora da
Escola de Engenharia da UFRJ, 1998.