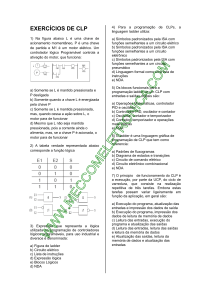
CLP- CONTROLADOR LÓGICO PROGRAMÁVEL
PROGRAMMABLE LOGIC CONTROLLER
Resumo: Este artigo tem por objetivo descrever funcionalidade do CLP (Controlador Lógico Programável.) um
dispositivo eletrônico digital.
Palavra - Chave: Controlador Lógico Programável
Abstract: The objective of this article is to describe functionality of CLP (programmable logic controller.) an electronic
device.
Keyword: programmable logic controller.
Autora: Marilourdes da Silva Mello
INTRODUÇÃO
Globalização versos Tecnologia, Industrialização
versos Produção em grande escala; estes são os fatores
que levaram a necessidade de desenvolver um dispositivo
que substituísse os painéis de controle a reles e que fosse
possível alterar uma produção sem ter que refazer toda a
lógica dos reles, e contadores. Assim sendo, foi
desenvolvido um sistema que desenvolvesse tais funções,
e que desde então, ganha mais funções e aplicações, e que
hoje é conhecido como controlador lógico programável
(CLP). O dispositivo mais utilizado que tornou possível
este tipo de sistema foi o CLP. O CLP surgiu na década
de 60, e ainda existem muitas empresas do ramo da
indústria, que envolve a automação, que possuem poucas
experiências com eles. A grande vantagem desse
dispositivo esta na possibilidade de reprogramação, sem
necessidade de realizar modificações de hardware. Mais o
que impulsionou a saída da automação das indústrias,
para os prédios e residências, foi à popularização e o
desenvolvimento dos computadores pessoais. De fato,
atualmente o que se busca é a conectividade entre os
diversos dispositivos, que integram um sistema
automatizado e os computadores pessoais.
FUNCIONALIDADE
DO
LÓGICO PROGRAMÁVEL.
CONTROLADOR
Controlador Lógico Programável ou Controlador
Programável, conhecido também por suas siglas CLP ou
CP e pela sigla de expressão inglesa PLC (Programmable
Logic Controller), é um computador especializado,
baseado num microprocessador que desempenha funções
de controle - controle de diversos tipos e níveis de
complexidade. Geralmente as famílias de Controladores
Lógicos Programáveis são definidas pela capacidade de
processamento de um determinado numero de pontos de
Entradas e/ou Saídas (E/S).
Controlador
Lógico
Programável
é
um
equipamento eletrônico digital com hardware e software
compatíveis com aplicações industriais. Segundo a
NEMA (National Electrical Manufacturers Association), é
um aparelho eletrônico digital que utiliza uma memória
programável para armazenar internamente instruções e
para implementar funções específicas, tais como lógica,
seqüenciamento, temporização, contagem e aritmética,
controlando, por meio de módulos de entradas e saídas,
vários tipos de máquinas ou processos. ”Segundo
MORAES e CASTRUCCI (p.31, 2001), é responsável
pela execução do programa do usuário, atualização da
memória de dados e memória de imagem”.
I/O(módulos de entrada e saídas), onde se comunica com
os sensores e contadores. Interface Homem Maquina
(IHM), Memória (para armazenamento de dados).CLP é o
controlador indicado para lidar com sistemas
caracterizados por eventos discretos (SEDs), ou seja, com
processos em que as variáveis assumem valores zero ou
um (ou variáveis ditas digitais, ou seja, que só assumem
valores dentro de um conjunto finito). Podem ainda lidar
com variáveis analógicas definidas por intervalos de
valores de corrente ou tensão elétrica. As entradas e/ou
saídas digitais são os elementos discretos, as entradas
e/ou saídas analógicas são os elementos variáveis entre
valores conhecidos de tensão ou corrente.Os CLP's estão
muito difundidos nas áreas de controle de processos ou de
automação industrial. No primeiro caso a aplicação se dá
nas industrias do tipo contínuo, produtoras de líquidos,
materiais gasosos e outros produtos, no outro caso a
aplicação se dá nas áreas relacionadas com a produção
em linhas de montagem, por exemplo na indústria do
automóvel.Num sistema típico, toda a informação dos
sensores é concentrada no controlador (CLP) que de
acordo com o programa em memória define o estado dos
pontos de saída conectados a atuadores.Os CLPs tem
capacidade de comunicação de dados via canais seriais.
Com isto podem ser supervisionados por computadores
formando sistemas de controle integrados. Softwares de
supervisão controlam redes de Controladores Lógicos
Programáveis.Os canais de comunicação nos CLP´s
permitem conectar à interface de operação (IHM),
computadores, outros CLP´s e até mesmo com unidades
de entradas e saídas remotas. Cada fabricante estabelece
um protocolo para fazer com seus equipamentos troquem
informações entre si. Os protocolos mais comuns são
Modbus (Modicon - Schneider Eletric), Profibus
(Siemens), Unitelway (Telemecanique - Schneider
Eletric) e DeviceNet (Allen Bradley), entre muitos
outros.Redes de campo abertas como PROFIBUS-DP são
de uso muito comum com CLPs permitindo aplicações
complexas na indústria automobilística, siderurgica, de
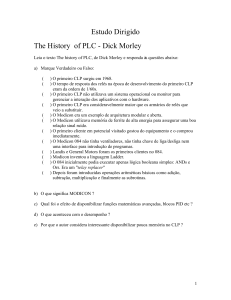
papel e celulose, e outras.O CLP foi idealizado pela
necessidade de poder se alterar uma linha de montagem
sem que tenha de fazer grandes modificações mecânicas e
elétricas.O CLP nasceu praticamente dentro da industria
automobilística, especificamente na Hydronic Division da
General Motors, em 1968, sob o comando do engenheiro
Richard Morley e seguindo uma especificação que
refletia as necessidades de muitas indústrias
manufatureiras.A idéia inicial do CLP foi de um
equipamento com as seguintes características resumidas:
Facilidade de programação, Facilidade de manutenção
com conceito plug-in, Alta confiabilidade, Dimensões
menores que painéis de Relês, para redução de custos,
Envio de dados para processamento centralizado, Preço
competitivo, Expansão em módulos;Mínimo de 4000
palavras na memória.Podemos didaticamente dividir os
CLP's historicamente de acordo com o sistema de
programação por ele utilizado: 1ª Geração: Os CLP's de
primeira geração se caracterizam pela programação
intimamente ligada ao hardware do equipamento. A
linguagem utilizada era o Assembly que variava de
acordo com o processador utilizado no projeto do CLP, ou
seja, para poder programar era necessário conhecer a
eletrônica do projeto do CLP. Assim a tarefa de
programação era desenvolvida por uma equipe técnica
altamente qualificada, gravando-se o programa em
memória EPROM, sendo realizada normalmente no
laboratório junto com a construção do CLP. 2ª Geração:
Aparecem as primeiras “Linguagens de Programação”
não tão dependentes do hardware do equipamento,
possíveis pela inclusão de um “Programa Monitor “ no
CLP, o qual converte (no jargão técnico, “compila”), as
instruções do programa, verifica o estado das entradas,
compara com as instruções do programa do usuário e
altera o estados das saídas. Os Terminais de Programação
(ou maletas, como eram conhecidas) eram na verdade
Programadores de Memória EPROM. As memórias
depois de programadas eram colocadas no CLP para que
o programa do usuário fosse executado. 3ª Geração: Os
CLP's passam a ter uma Entrada de Programação, onde
um Teclado ou Programador Portátil é conectado,
podendo alterar, apagar, gravar o programa do usuário,
além de realizar testes (Debug) no equipamento e no
programa. A estrutura física também sofre alterações
sendo a tendência para os Sistemas Modulares com
Bastidores ou Racks.4ª Geração: Com a popularização e a
diminuição dos preços dos microcomputadores
(normalmente clones do IBM PC), os CLP's passaram a
incluir uma entrada para a comunicação serial. Com o
auxílio dos microcomputadores a tarefa de programação
passou a ser realizada nestes. As vantagens eram a
utilização de várias representações das linguagens,
possibilidade de simulações e testes, treinamento e ajuda
por parte do software de programação, possibilidade de
armazenamento de vários programas no micro, etc.5ª
Geração: Atualmente existe uma preocupação em
padronizar protocolos de comunicação para os CLP's, de
modo a proporcionar que o equipamento de um fabricante
“converse” com o equipamento outro fabricante, não só
CLP's, como Controladores de Processos, Sistemas
Supervisórios, Redes Internas de Comunicação e etc.,
proporcionando uma integração a fim de facilitar a
automação, gerenciamento e desenvolvimento de plantas
industriais mais flexíveis e normalizadas, fruto da
chamada Globalização. Existem Fundações Mundiais
para o estabelecimento de normas e protocolos de
comunicação. A grande dificuldade tem sido uma
padronização por parte dos fabricantes.Com o avanço da
tecnologia e consolidação da aplicação dos CLPs no
controle de sistemas automatizados, é frequente o
desenvolvimento de novos recursos dos mesmos.O CLP
monitora o estado das entradas e saídas, em resposta às
instruções programadas na memória do usuário, e
energiza ou desenergiza as saídas, dependendo do
resultado lógico conseguido através das instruções de
programa. O programa é uma seqüência de instruções a
serem executadas pelo CLP para executar um processo. A
tarefa do CLP é ler, de forma cíclica, as instruções
contidas neste programa, interpreta-las e processar as
operações correspondentes. Um CLP deve realizar
basicamente as seguintes funções: a) Processamento do
programa e b) Varredura das entradas e saídas. Os
principais pontos de aplicações dos CLP’s são: a)
Máquinas: Máquinas operatrizes, máquinas têxteis,
máquinas para fundição, máquinas para indústria de
alimentos, etc. Indústria: Mineração, siderúrgicas,
aciarias, laminadoras, etc. O HOMEM X A MÁQUINA
Na automação industrial, as máquinas substituem tarefas
tipicamente mentais, tais como memorizações, cálculos e
supervisões. Os CLP’s dominam os dispositivos
pneumáticos, hidráulicos, mecânicos e eletroeletrônicos.
Os CLP’s substituem a ação do homem como sistema de
controle, e podem controlar grandezas tais como vazão,
temperatura, pressão, nível, velocidade, torque,
densidade, rotação, voltagem e corrente elétrica, ou seja,
as variáveis de controle de um processo industrial. O
primeiro projeto de CLP foi desenvolvido pela General
Motors para substituírem os sistemas de relés e reduzir os
custos de modificações e sucateamento dos controladores
das linhas de produção, devido a alteração nos modelos
de carros (1968). Sendo os primeiros CLP’s fabricados
para a indústria automobilística com total equivalência da
lógica a relés (1969). Já em 1971 surgem os primeiros
CLP’s controladores de outros processos. Em 1973 os
CLP’s começam a ficar inteligentes e ter processamento
aritmético, controle de impressora, transferência de dados
e operações matriciais. No mesmo ano de 1973, é
introduzido os controles de PID’s analógicos, permitindo
a sua difusão para áreas de fornos, controles hidráulicos e
pneumáticos. Em 1976 inicia-se a utilização de CLP’s em
configurações hierárquicas, integrando todo o sistema de
fabricação. Em 1977 começa a diminuir o tamanho físico
dos CLP’s com novas e modernas técnicas de
microprocessamento. Em 1978 começa a popularização
dos CLP’s que contribui muito para o aumento das
vendas. Em 1980 inicia uma nova geração de módulos
inteligentes que passam a dar mais velocidade ao
gerenciamento dos processos utilizando CLP. No inicio
da década de 80 começa uma grande evolução quanto ao
hardware, surgem novas tecnologias nos processadores
que os tornam mais rápidos, proporcionando maior
eficácia nos controles de processos, diminuição no
tamanho do equipamento com circuitos híbridos,
barateando muito o custo final do equipamento chegando
a compensar a aplicação de CLP’s quando fossem utilizar
de 4 a 6 relés. Essa prática diminui muito também o custo
da manutenção e ou alteração dos sistemas para atender
variações do processo. Apesar de todas essas mudanças
na estrutura física não houve mudanças no seu
funcionamento lógico básico. Hoje, podemos encontrar os
mais vários modelos disponíveis no mercado que se
diferenciam de fabricante para fabricante em relação ao
seu formato, tipos de cartões (módulos de entradas e
saídas) usados, quantidade de pontos nos cartões,
configurações gerais e softwares de configurações, mas a
lógica de programação é muito semelhante entre eles,
principalmente a programação em Ladder, que veremos
mais adiante.
Processamento do trabalho: O CLP processa o
programa do usuário em ciclo fechado. O programa do
usuário tem um inicio e um fim, o processador começa o
processamento no início do programa e quando chega ao
fim, atualiza as entradas e saídas e inicia novamente o
processamento do programa. O CLP somente executa
aquilo que foi programado a executar. O tempo de ciclo
do CLP é de alguns milissegundos por 1024 bytes de
instruções. Ao ser energizado, o CLP cumpre uma rotina
de inicialização gravada em seu sistema operacional. Essa
rotina realiza as seguintes tarefas: Limpeza das memórias
imagens , Teste da memória RAM , Teste de
executabilidade do programa. Após a execução dessas
rotinas, a CPU passa a fazer uma varredura constante, ou
seja, uma leitura seqüencial das instruções em "loop".
Após o CLP fazer a varredura no programa do usuário,
este transfere os dados da memória-imagem das saídas
para o módulo de saída, realiza a leitura do módulo de
entrada e atualiza a memória-imagem das entradas. Estas
entradas e saídas são pontos de comunicação dos
equipamentos de processo com o CLP. A primeira
varredura passa pelas entradas para verificar seus estados
lógicos e armazenar esses dados. Após ter verificado o
estado lógico da última entrada, ela atualiza a tabela
imagem de entrada com esses dados. A varredura das
entradas normalmente gira em torno de 2 ms. Uma vez
gravados os estados lógicos das entradas na respectiva
tabela-imagem, o microprocessador inicia a execução do
programa de acordo com as instruções gravadas. Após o
processamento do programa, o microprocessador
armazena os dados na tabela-imagem da saída. Após a
atualização da tabela-imagem, o microprocessador
transfere esses dados para o módulo de saída a fim de
ligar ou desligar os elementos que se encontram no
campo. O tempo de processamento das instruções
depende da quantidade de passos do programa, podendo
variar entre 1 e 80 ms. Após a transferência dos dados da
tabela-imagem da saída para os módulos de saída, o ciclo
do CLP termina e a varredura é reiniciada. Os CLP’s
contém uma proteção para garantir que o ciclo seja
executado em menos de 200 ms. Se o controlador não
executar o ciclo em menos de 200 ms por algum erro de
programação, ele se desliga e reseta as saídas. Essa
proteção se chama time watch dog (cão de guarda do
tempo).
A memória EPROM contém o programa que inicia o
CLP, armazena os programas executivos (sistema) e
gerencia o roteiro de dados e a seqüência de operação. A
CPU trabalha junto com este programa já em EPROM,
elaborado pelo fabricante que apresenta dados referentes
a este CLP e ao seu desempenho.
programmable logic controller É uma memória de
aplicação, que armazena o programa do usuário. Esta
área, reservada ao programa do usuário, contém alguns
Kbytes de palavras-livres que serão processadas pela
CPU. Nesta área, entra-se com o programa que se deseja
executar em relação ao equipamento. A CPU processa
este programa, atualiza a memória de dados internos e
imagem E/S e retorna novamente para esta área de
memória. A posição da seletora RUN e PROG indica se o
CLP está ou não operando o programa de aplicação RUN:
O CLP está operando o programa de aplicação. A
varredura do programa de aplicação é cíclica, o CLP faz a
varredura e a execução do programa de aplicação. As
saídas serão energizadas ou desenergizadas de acordo
com o programa de aplicação. PROGR: O CLP não está
operando o programa de aplicação. Neste caso, o
programador realiza a programação, inserindo as
instruções do programa de aplicação na memória do CLP
através do terminal de programação. As saídas serão
desenergizadas nesta posição. É uma área reservada para
o controle do programa do usuário. Nesta área se
encontram dados referentes ao processamento do
programa do usuário. Todos os bytes desta área são de
controle. É uma tabela de valores manipuláveis. É uma
área de memória reservada para interligação entre CLP e
equipamentos. São do tipo RAM, pois têm seus dados
constantemente alterados. A CPU, após ter efetuado a
leitura de todas as entradas, armazena o estado lógico
dessas informações na área denominada status das
entradas (ou imagem das entradas). Uma vez memorizado
o estado lógico das entradas, o programa processará esses
níveis e os resultados serão armazenados na área
denominada status das saídas (ou imagem das saídas).Os
níveis lógicos da memória-imagem da saída só são
transferidos para as respectivas saídas após o término da
seqüência de operações contidas no programa. Do mesmo
modo, os níveis lógicos das entradas só são transferidos
para a memória-imagem das entradas após a verificação
de todas as entradas. Observação: Os níveis lógicos da
memória-imagem podem ser monitorados pelo usuário e
também podem ser forçados a um nível desejado através
do terminal de programação.
Linguagem de Programação: Os CLP’s, assim como
os computadores, necessitam de um programa para seu
funcionamento. Como sabemos, um programa é uma lista
de instruções que coordenam e sequenciam as operações
que o microprocessador deve executar. Qualquer
programa requer uma linguagem de programação através
da qual o usuário pode se comunicar com a máquina. As
diversas linguagens de programação são classificadas em
dois grupos: § Linguagem de baixo nível § Linguagem de
alto nível. Considera-se linguagem de baixo nível aquela
cujas instruções são escritas em código binário que o
microprocessador interpreta. Para se programar nessa
linguagem, o programador necessita ter conhecimento da
arquitetura do microprocessador. Os programas escritos
em código binário são trabalhosos e difíceis de serem
interpretados e manipulados. Para minimizar esse
problema, os programas podem ser escritos em linguagem
de máquina ou linguagem assembler. A linguagem de
máquina utiliza o código hexadecimal para escrever os
programas. Um codificador entre o teclado e o
microprocessador traduz o código hexadecimal para o
binário correspondente. A linguagem de alto nível é
aquela que se aproxima da linguagem utilizada pelo
homem. Nessa linguagem, o computador usa
compiladores ( ou interpretadores ) poderosos que
traduzem as instruções de um programa para a linguagem
de máquina. As instruções dos programas são
direcionadas para área onde vai ser aplicada. Por
exemplo, a linguagem STEP 5 é direcionada para a
operação dos CLP’s e suas instruções são contatos de
relés e blocos lógicos. Entre as linguagens de alto nível
podemos destacar: § Linguagem BASIC § Linguagem
FORTRAN § Linguagem COBOL § Linguagem
LADDER 3.4.3. LINGUAGEM LADDER A linguagem
ladder é a linguagem utilizada pela maioria dos CLP’s.
Ela foi criada para solucionar os problemas da área da
automação e se divide em três tipos de representação:
diagrama lógico, lista de instruções, diagrama de contatos
A programação em linguagem Ladder é uma
ferramenta usada para descrever o formato de diagramas
esquemáticos introduzidos num PLC. A linguagem usa
dois elementos básicos: instruções lógicas de relé e
instruções para transferência de dados. Nesta secção será
examinada a utilização de instruções lógicas de relé
discretas. Este conjunto de instruções lógicas permite que
a linguagem Ladder possa substituir, de uma forma
eficaz, o controlo realizado exclusivamente com relés.Um
circuito de lógica Ladder consiste numa rede formada por
linhas, nas quais deve existir continuidade para que se
possa ativar a respectiva saída. Estas saídas são
controladas pela combinação de estados das entradas e
saídas. As condições podem ser ligadas em série,
paralelo, ou série-paralela, a fim de construir a lógica
necessária.Desta forma, uma rede Ladder define a
estratégia de comando que controla as saídas do PLC. Ao
contrário da lógica de relé, uma rede Ladder não
representa ligações físicas.
CONSIDERAÇÕES FINAIS
Não se pode falar em automação sem que envolva
o CLP, pois bem espero com esta pesquisa estar
.
contribuindo, pois com o embasamento aplicado já se
pode ter uma idéia genérica de CLP. Dessa forma o CLP é
importante na evolução tecnológica substituindo muitos
elementos por apenas um, poupando trabalho ao homem.
REFERÊNCIAS :
CAPELLI, Alexandre.”CLP Controladores lógicos programáveis na prática”.São Paulo: Antenna. 2007.
FIALHO, Arivelto Bustamante. “ Automação Pneumatica.”. São Paulo: Érica. 2003.
MORAES, Cicero Couto; CASTRUCCI, Plinio de Lauro. “ Engenharia de Automação Industrial”. São Paulo: LTC.
2001.
PRUDENTE,Francesco.”Automação Industrial – PLC”.São Paulo: LTC. 2007.