Universidade Federal de Minas Gerais
Escola de Engenharia
Departamento de Engenharia Eletrônica
Laboratório de Informática Industrial
1a AULA - Controlador Lógico Programável: História. Características de Hardware.
Objetivos: Apresentação do programa de aulas práticas e de conceitos fundamentais a serem utilizados ao longo das
aulas, como o de Controlador Lógico Programável (CLP) e a “Pirâmide de Automação”.
CONTROLADOR LÓGICO PROGRAMÁVEL: HISTÓRIA
O Controlador Lógico Programável (CLP) é um dispositivo utilizado na monitoração e controle de
processos industriais. Os primeiros dispositivos a realizarem esse tipo de tarefa surgiram com a Revolução
Industrial, no final do século XIX. Eram dispositivos mecânicos criados para automatizar tarefas
repetitivas. Eles realizavam funções específicas e se desgastavam muito facilmente. Nos anos 20, esses
dispositivos mecânicos foram substituídos por relés e contatores, dispositivos eletrônicos que
possibilitaram a utilização de uma lógica mais complexa.
A partir dos anos 70, com o desenvolvimento de computadores comerciais, estes passaram a ser utilizados
nas indústrias, trazendo a possibilidade de se programar a lógica e modificá-la sempre que necessário de
forma mais fácil. Porém, esses computadores eram grandes, caros, difíceis de programar e muito sensíveis
à utilização em ambientes “hostis” encontrados em muitas plantas industriais. Então, a demanda por um
equipamento mais robusto fez com que se desenvolvessem os primeiros CLP's. Inicialmente, eles tinham
um conjunto de instruções reduzido, normalmente somente condições lógicas e não possuíam entradas
analógicas, podendo manipular apenas aplicações de controle digital (discreto). Atualmente, as plantas
industriais normalmente precisam manipular tanto controle digital quanto malhas analógicas com o
mesmo sistema de controle. As atuais funções de controle existentes em uma planta industrial são
normalmente distribuídas entre um número de controladores programáveis montados próximos aos
equipamentos a serem controlados. Esses controladores são conectados a um computador supervisório
central que gerencia os alarmes, receitas e relatórios.
Atualmente, a maioria das plantas industriais possui um sistema de supervisão chamado Sistema SCADA
(Supervisory Control And Data Acquisition). Em um sistema SCADA o operador pode monitorar o processo
remotamente, selecionar diferentes programas e avaliar a situação do processo produtivo.
CONTROLADOR LÓGICO PROGRAMÁVEL: CARACTERÍSTICAS DE HARDWARE
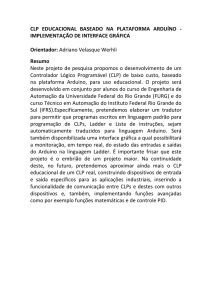
Os principais componentes de hardware de um CLP são os seguintes:
•
Fonte: Fornece tensão DC em níveis adequados para alimentar o processador e os módulos de
E/S.
•
Bateria: todas as CPUs têm um capacitor que as mantêm energizadas mesmo que fiquem sem
energização.
•
Rack: rack de 16 módulos em até três bancos para uma mesma CPU (no entanto, para cada banco
é necessária uma fonte).
•
Processador: Este módulo corresponde à CPU e memória do CLP. A memória usualmente
contém o sistema operacional (“executivo”), tabelas de dados e programa do usuário. Monitora e
controla os dispositivos de E/S (capacidade máxima de pontos E/S determinada pelo modelo de
CLP), ligados aos pontos dos cartões de E/S.
Laboratório de Informática Industrial – Prof. Luiz T. S. Mendes– DELT/EE-UFMG - 2011
•
Cartões de E/S: Contêm os circuitos necessários para interfacear os dispositivos de campo com o
processador. Cada circuito de E/S possui isolação ótica para proteger contra transientes. Vários
módulos têm filtros também. A maioria tem LEDS indicadores para sinalizar o estado de cada
dispositivo de E/S conectado.
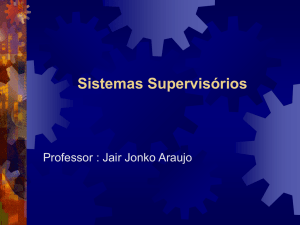
Figura 1: Diagrama de blocos de um CLP com seus elementos básicos de hardware [Braga, A.R., 1994]
Na instalação e utilização de um CLP, é absolutamente essencial o aterramento adequado de todos os seus
componentes.
No laboratório de Informática Industrial, o CLP a ser utilizado é o modelo 1769L32E, da linha
CompactLogix da Rockwell Automation®. Algumas das características deste CLP são descritas a seguir:
•
Fonte: No modelo de CLP utilizado no laboratório, a fonte é alimentada em 120/240VCA e
fornece uma corrente de 2A em 5V e 1A em 24V. A fonte distribui energia para todos os
componentes conectados a ela (processador e cartões). Possui proteção contra holdup (em caso de
perda momentânea de energia, a fonte mantém as saídas por até 20 segundos), curto-circuito e
sobretensão, apresentando ainda fusível interno.
•
Processador: CPU’s 1769-L32E da linha CompactLogix apresentam 750Kbytes de memória para
programa de usuário, que pode ser complementada com um cartão de memória não-volátil
CompactFlash. A esse modelo são incorporadas duas portas de comunicação: uma porta
Ethernet/IP e uma porta serial RS-232 (DF1 ou ASCII). As linguagens de programação
suportadas são a lógica ladder, texto estruturado (ST) , diagrama de bloco de funções (FBD) e o
diagrama seqüencial de funções (SFC). Esse controlador suporta até 16 módulos de I/O. Sua
estrutura pode ser montada tanto em painel como em trilho DIN. O sistema operacional desse
controlador pode operar com multiprocessamento e multi-tarefas (esse modelo executa até 6
tarefas ao mesmo tempo).
Referências
Braga, A.R. (1994): Implementação de Estratégias de Controle Multimalha e Multivariável. Dissertação de Mestrado, PPGEE-UFMG.
Manual do Compact Logix: Disponível em: http://www.ab.com/programmablecontrol/pac/compactlogix/index.html.
Manual de instalação, Rockwell Automation, 1769-L32E, 1769-PA2.
Evolução dos Sistemas de Controle. Disponível em: http://www.cpdee.ufmg.br/~seixas.
Laboratório de Informática Industrial – Prof. Luiz T. S. Mendes– DELT/EE-UFMG - 2011