R. M. Natal Jorge
L. M. J. S. Dinis
Teoria da Plasticidade
Departamento de Engenharia Mecânica e Gestão Industrial
Faculdade de Engenharia
Universidade do Porto
(2004/2005)
Teoria da Plasticidade
1
Teoria da Plasticidade
1. Introdução
Na generalidade dos projectos de componentes estruturais, admite-se que as
solicitações impostas conduzem a um comportamento elástico dos materiais que os
constituem. No entanto, em determinadas situações, como por exemplo, motivos de
segurança, é necessário prever o comportamento dos componentes perante o aparecimento
de deformações com características plásticas. Por outro lado, a simulação dos processos
tecnológicos de fabrico, como por exemplo a estampagem ou o forjamento por injecção,
envolvem inevitavelmente deformações plásticas nas peças a enformar.
Para os materiais utilizados normalmente na construção mecânica, e à temperatura
ambiente, é possível analisar o seu comportamento recorrendo à teoria matemática da
plasticidade [6][18][19][22][28][36], pois, de uma forma geral, as deformações plásticas
envolvidas podem-se considerar independentes do tempo.
No presente texto apresenta-se, de um ponto de vista genérico, os conceitos
fundamentais do modelo elasto-plástico: critério de cedência, regras de encruamento e de
escoamento plástico e, leis constitutivas.
2
Teoria da Plasticidade
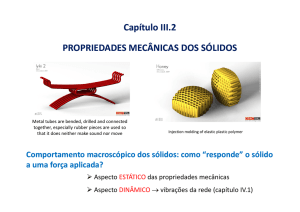
2. Problemas Uniaxiais
Tomando a tensão aplicada σ e a deformação ε, para um comportamento que se
possa identificar com o comportamento plástico, podem-se fazer as seguintes distinções:
i) Comportamento linear elástico:
σ
σ
σ
ε
Fig. 1-Modelo linear elástico.
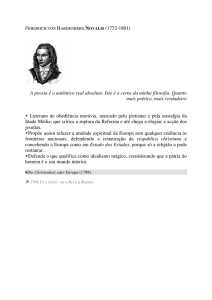
ii) Comportamento rígido-perfeitamente plástico:
σ
σ
atrito
σ
ε
Fig. 2-Modelo rígido-perfeitamente plástico.
3
Teoria da Plasticidade
iii) Comportamento rígido-plástico com encruamento linear:
σ
σ
atrito
ε
Fig. 3-Modelo rígido-plástico com encruamento linear.
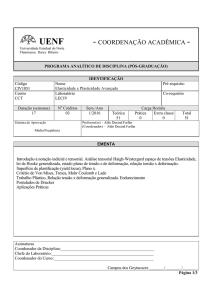
iv) Comportamento elástico-perfeitamente plástico:
σ
σ
atrito
σ
ε
Fig. 4-Modelo elástico-perfeitamente plástico.
v) Comportamento elásto-plástico com encruamento linear:
σ
atrito
σ
ε
Fig. 5-Modelo elásto-plástico com endurecimento linear.
4
Teoria da Plasticidade
Como exemplo de aplicação, considere-se uma estrutura articulada hiperestática
representada na figura seguinte.
y
45
45
1
L
2
3
x, Δ1
P, Δ2
Fig. 6-Estrutura articulada.
Considere-se que as três barras são constituídas do mesmo material, cujo módulo de
elasticidade vale E, apresentam igual secção, A, e a carga de rotura, isto é, a força uniaxial
(compressão ou tracção) a que corresponde um estado de tensão coincidente com a tensão
de cedência obtida no ensaio de tracção, é Pc. Admita-se ainda que, uma vez atingida a
tensão de cedência o material pode deformar-se infinitamente mantendo-se contudo o
estado de tensão constante. Pretende-se determinar qual o valor da carga de rotura da
estrutura, Pr, em função de Pc.
EiAi/Li×cosθi
EiAi/Li×cosθi×senθi
cosθi
EiAi/Li
×(cosθi)2
Li
y
θi
x
Fig. 7-Esforços normais numa barra.
5
Teoria da Plasticidade
Numa primeira fase estabelece-se um cálculo linear elástico, o que permitirá
determinar quais os esforços normais suportados por cada barra. Para o efeito, pode-se
recorrer ao método dos deslocamentos [15], em que numa dada barra i, a uma variação de
comprimento cosθi, corresponde um esforço normal EiAi/Li×cosθi (ver Fig. 7).
Considerando os graus de liberdade assinalados na figura, Δ1 e Δ2, tem-se os
seguintes coeficientes de rigidez para a estrutura:
K11 =
K 21 =
3
∑
i =1
3
∑
i =1
Ei Ai
× cos 2 θ i
Li
Ei Ai
× cos θ i × senθ i = K12
Li
K 22 =
3
∑
i =1
(1)
Ei Ai
× sen 2θ i
Li
ou explicitando:
K11
⎛ cos 2 45o cos 2 90o cos 2 135o ⎞
2 EA
= EA ⎜
+
+
⎟ =
L2
L3
2 L
⎝ L1
⎠
⎛ sen45o × cos 45o sen90o × cos 90o sen135o × cos135o ⎞
+
+
K 21 = K12 = EA ⎜
⎟ = 0
L1
L2
L3
⎝
⎠
(2)
⎛
⎛ sen 2 45o sen 2 90o sen 2 135o ⎞
2 ⎞ EA
K 22 = EA ⎜
+
+
⎟
⎟ = ⎜⎜1 +
L2
L3
2 ⎟⎠ L
⎝ L1
⎠
⎝
O estabelecimento das equações de equilíbrio segundo os respectivos graus de liberdade
permite determinar as componentes do vector deslocamento do nó de aplicação da força
exterior, P:
⎡ 2
⎢
EA ⎢ 2
L ⎢
⎢ 0
⎣⎢
⎤
⎥
⎥ ⎧u ⎫ = ⎧ 0 ⎫ ⇒ ⎧u ⎫ = L × 1 ⎧ 0 ⎫
⎨ ⎬
⎨ ⎬
⎨ ⎬
⎨ ⎬
⎛
P⎭
v⎭
EA ⎛⎜⎜1+ 2 ⎞⎟⎟ ⎩ P ⎭
2 ⎞⎥ ⎩v ⎭
⎩
⎩
2
⎝
⎠
⎜⎜1 +
⎟⎥
2 ⎟⎠ ⎦⎥
⎝
0
(3)
O esforço normal em cada uma das barras pode ser calculado por:
Fi =
Ai Ei
AE
cos θ i × u + i i senθ i × v
Li
Li
Para o conjunto das três barras tem-se:
(4)
6
Teoria da Plasticidade
⎡ cos θ1
⎢
⎢ L1
F
⎧ 1⎫
⎢ cos θ 2
⎪ ⎪
⎨ F2 ⎬ = AE ⎢
⎢ L2
⎪F ⎪
⎩ 3⎭
⎢ cos θ 3
⎢
⎢⎣ L3
senθ1 ⎤
⎥
L1 ⎥
senθ 2 ⎥ ⎧u ⎫
⎥×⎨ ⎬
L2 ⎥ ⎩ v ⎭
senθ 3 ⎥
⎥
L3 ⎥⎦
(5)
ou, atendendo à relação entre comprimentos, L2=L e L1=L3= 2 L / 2 ,
⎡
⎧ F1 ⎫
⎢
AE
⎪ ⎪
⎨ F2 ⎬ =
L ⎢⎢
⎪F ⎪
⎩ 3⎭
⎣
2
2
2
2
⎧2 − 2 ⎫
⎪
⎪
2
⎤
2 ⎪
2 sen45
⎪
⎥ L
⎧0⎫
⎪
⎪
× ⎛ 12 ⎞ ⎨ ⎬ = ⎨ 2 − 2 ⎬× P
sen90 ⎥ ×
⎪
⎪
⎥ EA ⎜⎜⎝1+ 2 ⎟⎟⎠ ⎩ P ⎭
2
2 sen135 ⎦
⎪2 − 2 ⎪
⎪⎩ 2 ⎪⎭
cos 45
cos 90
cos135
(6)
Os esforços calculados, que apenas são válidos enquanto todas as barras
"funcionarem" no domínio linear elástico, permitem concluir que a barra 2 é a que suporta
um maior esforço normal, pelo que, num processo de carregamento incremental será a
primeira a atingir a carga correspondente à tensão de cedência. Com base neste raciocínio
é possível determinar o valor da força P (P′) que leva a que a primeira barra da estrutura
(barra 2) atinja a carga de cedência:
(
)
F2 = Pc = 2 − 2 P
→
P′ =
Pc
2− 2
(7)
a que corresponde um deslocamento vertical no nó de aplicação da força, v′:
v′ =
Pc
L
L
L
× ⎛ P′2 ⎞ =
× ⎛ 12 ⎞ ×
=
Pc
EA ⎜⎜1+ 2 ⎟⎟ EA ⎜⎜1+ 2 ⎟⎟ 2 − 2 EA
⎝
⎠
⎝
(8)
⎠
Devido à simetria do problema, as duas restantes barras atingirão em simultâneo a
carga de cedência, o que ocorrerá quando a força P atingir um valor P″. Para o cálculo
deste valor pode-se recorrer ao equilíbrio vertical do nó de aplicação da força.
7
Teoria da Plasticidade
Pc
F1
F3
P (≡Pr)
A carga de rotura é atingida quando os esforços normais F1 e F3
igualarem a carga de cedência, Pc. A equação de equilíbrio
vertical permite escrever:
∑F
i
v
= 0 → Pc + F1 cos 45 + F3 cos 45 − P = 0
(9)
Fazendo coincidir F1=F3≡Pc e P≡Pr, resulta:
(
)
Pr = (1 + 2 × cos 45 ) Pc = 1 + 2 Pc
(10)
Para forças exteriores em que se verifique P ∈ [P′,Pr[, o cálculo dos deslocamentos
nodais faz-se de modo semelhante, mas considerando apenas as duas barras que se
encontram em regime elástico.
y
45
L
45
1
3
Pc
x, Δ1
P∈[P′,Pr[, Δ2
Fig. 8-Estrutura articulada para P>P′.
As componentes do vector deslocamento do nó de aplicação da força tomam os seguintes
valores:
⎡ 2
EA ⎢⎢ 2
L ⎢
⎢ 0
⎣
⎤
0 ⎥
⎧ 0 ⎫
⎧u ⎫
⎧u ⎫
L
2 ⎧ 0 ⎫
⎥⎨ ⎬ = ⎨
×
⎬ ⇒ ⎨ ⎬ =
⎨
⎬
EA
2 ⎩ P − Pc ⎭
2 ⎥ ⎩v ⎭
⎩v ⎭
⎩ P − Pc ⎭
⎥
2 ⎦
(11)
8
Teoria da Plasticidade
Pelo que, para uma força exterior de, P ≡ Pr = (1 + 2) Pc , o deslocamento vertical
segundo o grau de liberdade Δ2 toma o valor: vr = 2 Pc L / EA . Pode-se agora traçar o
gráfico carga-deslocamento, que se encontra representado na Fig. 9.
P
×Pc
1+ 2
1
1+ 2
1
2
×LPc/EA v
Fig. 9-Gráfico carga-deslocamento vertical.
3. Observações Experimentais: O Ensaio de Tracção
3.1. Limite de Proporcionalidade. Limite Elástico e Tensão de Cedência
A facilidade de execução e a reprodutividade dos resultados tornam o ensaio de
tracção, um dos ensaios mecânicos mais importantes.
A aplicação de uma força num corpo sólido promove uma deformação do material na
direcção dessa força, consistindo o ensaio de tracção em submeter ao corpo sólido uma
força que tende a alongá-lo. Para a realização do ensaio o corpo sólido tem dimensões
normalizadas, designando-se provete. O provete é então submetido a um carregamento
uniaxial o que provoca a sua deformação. Para uma liga metálica, o gráfico tensãodeformação pode tomar o aspecto representado na Fig. 10.
9
Teoria da Plasticidade
σ
P
B
tensão limite elástico
A
tensão limite proporcionalidade
O
ε
ε p εe
Fig. 10-Gráfico tensão-deformação de uma liga metálica.
No ponto A atinge-se o limite do comportamento linear, sendo a tensão
correspondente designada por tensão limite de proporcionalidade, a partir do qual não é,
regra geral, aplicável a lei de Hooke como lei constitutiva. Entendendo-se como
comportamento elástico, o fenómeno associado à ausência de deformações pós
carregamento, o limite elástico de comportamento do material ocorre no ponto B,
correspondendo-lhe a tensão, conhecida como tensão limite elástico.
σ
limite superior da
tensão de cedência
patamar de cedência
O
ε
Fig. 11-Gráfico tensão-deformação de um aço de baixo teor em carbono [13].
Outros metais apresentam no entanto uma curva ligeiramente distinta da anterior
(Fig. 11). De facto, alguns metais, apresentam um valor de tensão, tensão limite superior
da tensão de cedência, seguido de uma ligeira quebra. Seguidamente, verifica-se um
aumento da deformação, mas que não é acompanhado por variação na tensão. Esta região
10
Teoria da Plasticidade
do gráfico é conhecida como patamar de cedência. Posteriormente, o valor da tensão
retoma uma variação crescente, designando-se o fenómeno, como encruamento
(endurecimento por deformação) do material.
Nos metais mais correntes, a parcela da curva AB no gráfico da Fig. 10 é, em geral,
muito reduzida, sendo por isso frequente não distinguir entre tensão limite elástico e tensão
limite de proporcionalidade. Por outro lado, também a diferença entre o valor da tensão
limite superior da tensão de cedência e o patamar de cedência, ou tensão de escoamento, é
normalmente muito reduzida, pelo que se refere apenas tensão de cedência, σ Y0 . Devido à
dificuldade existente em distinguir no ensaio todos estes parâmetros, normalmente apenas
se refere a tensão de cedência como a tensão necessária para provocar uma deformação
plástica de 0,2%.
3.2. Histerese e Encruamento
Na região plástica, isto é, quando o nível de carregamento corresponde a um valor
para a tensão superior à tensão de cedência, o incremento de deformação plástica é
acompanhado de um incremento de tensão, e diz-se que houve um encruamento do
material.
Regra geral, a curva tensão-deformação de descarregamento pós deformação plástica
(AA′ do gráfico da Fig. 12) não é exactamente linear e paralela à porção elástica inicial da
curva. No carregamento seguinte (curva A′A″) observa-se que a curva não coincide com a
curva de descarga, retomando a curva inicial em A″. Este fenómeno é conhecido por
histerese [6] não sendo considerado no modelo descrito no presente texto.
σ
A
A″
O
A′
ε
Fig. 12-Gráfico tensão-deformação com descarregamento e carregamento.
11
Teoria da Plasticidade
3.3. Efeito de Bauschinger
Considere-se o seguinte ciclo de carregamento: o provete é submetido a um esforço
de tracção de modo a que, na respectiva curva tensão-deformação se atinja o ponto D (ver
T
Fig. 13), portanto para além do ponto representativo da tensão de cedência ( σ Y0
); neste
ponto (D) o carregamento é totalmente retirado, permanecendo uma deformação plástica
(ponto G); seguidamente aplica-se um esforço, agora de compressão, atingindo-se o ponto
D′. Como se esquematiza na figura, os valores em módulo, para a tensão de cedência à
T
C
T
C
tracção ( σ Y0
) e compressão ( σ Y0
) não coincidem, verificando-se σ Y0
> σ Y0
. Esta
dependência da tensão de cedência com o sentido de carregamento é conhecida como
efeito de Bauschinger [9].
σ
D
T
σ Y0
O
G
ε
C
σ Y0
D′
Fig. 13-Efeito de Bauschinger.
3.4. Efeito do Tempo
Geralmente, a deformação permanente é dependente do tempo, verificando-se a
necessidade de um certo intervalo de tempo para que a deformação plástica atinja o seu
valor final (real).
12
Teoria da Plasticidade
σ
P
A
P′
B
O
C
A′
ε
Fig. 14-Curvas tensão-deformação em equilíbrio dinâmico e quase-estático.
Na Fig. 14 representa-se um gráfico tensão-deformação com duas curvas obtidas em
dois ensaios de tracção realizados a velocidades diferentes. A curva OP é obtida num
ensaio realizado com uma taxa de deformação superior à taxa aplicada no ensaio referente
à curva OP′. Conclui-se assim, que a taxa de deformação com que se realiza o ensaio de
tracção conduz a diferentes curvas tensão-deformação. Outra observação importante que se
verifica nestes testes, é que, realizando-se o ensaio a uma taxa de deformação finita, e
portanto numa situação dinâmica, se se parar no ponto A, verifica-se que o estado de
deformação tende, com o tempo, para o ponto A′, mantendo-se contudo o mesmo nível de
tensão. Quando o ponto A′ é atingido a taxa de deformação é aproximadamente nula, isto
é, entre o ponto A e o ponto A′ a taxa de deformação sofreu uma variação, cuja lei pode
seguir a curva do gráfico da Fig. 15.
ε&
p
O
t
Fig. 15-Variação da taxa de deformação com o tempo.
Realizando-se vários testes para níveis de tensão diferente obtém-se a curva OP′,
denominada curva quase-estática de tensão-deformação, enquanto a curva OP é designada
por curva de tensão-deformação dinâmica. O descarregamento realizado a partir do ponto
A na curva de equilíbrio dinâmico, sendo feito com uma velocidade finita, segue o
percurso ABC, e em que apenas, do ponto B para C se verifica uma variação linear,
observando-se uma deformação plástica entre A e B.
13
Teoria da Plasticidade
Em certos metais, a dependência da deformação plástica com a taxa de deformação
pode ser razoavelmente quantificada por [24] ε& r , em que o expoente r depende da
deformação plástica e da temperatura. No quadro seguinte apresentam-se vários valores de
r para um ensaio de compressão realizado à temperatura ambiente [21].
Quadro I
Valores de r para as seguintes reduções em altura
Metal
10%
30%
50%
Alumínio
0,013
0,018
0,020
Cobre
0,001
0,002
0,010
3.5. Efeito da Pressão, Humidade e Temperatura
O expoente r, definido anteriormente, de modo a quantificar a dependência da
deformação plástica com a taxa de deformação é ainda função da temperatura, como se
mostra no quadro seguinte [21].
Quadro II
Metal
Alumínio
Cobre
Aço
Temperatura (ºC)
Valores de r para as seguintes reduções em altura
10%
30%
50%
18
0,013
0,018
0,020
350
0,055
0,073
0,088
550
0,130
0,141
0,155
18
0,001
0,002
0,010
450
0,001
0,008
0,031
900
0,134
0,154
0,190
930
0,088
0,094
0,105
1200
0,116
0,141
0,196
Os ensaios experimentais realizados com materiais dúcteis e submetidos a diferentes
pressões hidrostáticas mostraram que o valor obtido para a tensão de cedência destes
materiais não é afectado com a variação da pressão hidrostática, verificando-se contudo
que a deformação na fractura aumenta com a pressão hidrostática [6].
14
Teoria da Plasticidade
Considere-se a curva tensão-extensão representada no gráfico da Fig. 16 em que,
quando se atinge o ponto A da curva localizado na região plástica, a carga é mantida
constante. Observa-se que a deformação aumenta de A para B e o seu valor depende do
tempo de permanência da tensão constante. Quanto maior for o tempo de permanência da
tensão constante, maior será o alongamento verificado. O fenómeno acabado de descrever
é conhecido por fluência (creep) [22] e para certos materiais pode até ser verificado à
temperatura ambiente.
σ
B′
A
B
ε
O
Fig. 16-Definição de Fluência.
Considerando a extensão de fluência ( ε c ) como a extensão total menos a inicial (em
que se aplicou a tensão), obtém-se tipicamente para os metais uma das curvas
representadas na Fig. 17 [24]. Na curva de fluência típica (a traço interrompido) é possível
distinguir três estágios correspondentes a: fluência primária, secundária e terciária. Para
baixas temperaturas e tensões apenas é visível o estagio de fluência primário, verificandose um valor limite.
εc
curva de fluência para
elevada temperatura e
tensão
fluência
terciária
fluência
secundária
fluência
primária
curva de fluência a baixa
temperatura e tensão
O
t
Fig. 17-Curvas de fluência típicas para os metais.
Para elevadas temperaturas e tensões a fluência primária mostra uma dependência
logarítmica ou potencial de acordo com uma das seguintes leis [24]:
15
Teoria da Plasticidade
ε c ∝ ln(t )
(12.1)
ε c ∝ tα
(12.2)
em que α toma valores entre 0 e 1, designando-se por lei de fluência de Andrade para
α=1/3.
Segundo Nadai [29], a fluência descrita pela lei da potência pode ser obtida a partir
duma fórmula que relaciona a tensão, a deformação de fluência ( ε c ) e a taxa de
deformação de fluência ( ε& c ):
n
r
(13)
σ = C ( ε c ) (ε& c )
em que C, n e r dependem da temperatura. A fluência terciária é normalmente considerada
como resultante de modificações ao nível estrutural acompanhada de perda de resistência
e, eventualmente, de rotura. Segundo Lubliner [24], para um metal submetido a elevadas
temperaturas e tensões pode-se considerar como característica desse metal a taxa de
fluência mínima. Para um determinado estado de tensão, a relação da temperatura com essa
taxa de fluência segue uma lei análoga à expressão de Arrhenius para a taxa de
deformação, que se analisará adiante. Por outro lado, a dependência dessa taxa de fluência
mínima, para uma dada temperatura, pode ser aproximada por uma lei exponencial para
um elevado estado de tensão, ou, para um estado de tensão reduzido, por uma função
potencial do tipo:
c
(14)
ε&min
∝σq
Esta relação é normalmente conhecida pela lei de Bailey-Norton [24], verificando-se que a
expressão de Nadai (13) descreve esta mesma lei tomando n=0 e r=1/q. Uma aproximação
utilizada para o cálculo da deformação de fluência como função do tempo e para uma dada
temperatura é a seguinte:
c
(15)
ε c ( t ) = ε 0c + ε&min
t
c
em que ε&min
é a taxa de fluência mínima, e ε 0c é um valor fictício definido pela intercepção
da recta tangente à curva de fluência num ponto pertencente à zona em que a taxa de
fluência é estacionária.
Todavia, para muitos materiais e a diferentes temperaturas, a deformação inelástica é
insignificante quando o nível de tensão é inferior à tensão de cedência. Um modelo simples
que descreve este efeito é o modelo de Bingham:
σ < σ Y0
⎧0,
⎪
&
ε = ⎨⎛ σ Y0 ⎞ σ
⎪⎜1 − σ ⎟ η , σ < σ Y0
⎠
⎩⎝
(16)
16
Teoria da Plasticidade
em que η representa a viscosidade do metal e σ representa o estado de tensão instalado.
Deve-se ainda observar que o modelo de Bingham acabado de descrever representa de
facto o modelo mais simples apresentado pela teoria da viscoplasticidade.
Os trabalhos experimentais demonstraram que nos ensaios de tracção realizados a
temperaturas superiores à temperatura ambiente se obtêm valores diferentes, quer para as
constantes elásticas, quer para as propriedades de resistência, dos obtidos à temperatura
ambiente. Por exemplo, os aços ao carbono revelam um aumento da resistência à tracção
para temperaturas até 300ºC a partir da qual a resistência à tracção desce cerca de 50% até
temperaturas da ordem de 500 a 600ºC. De um modo geral, para os metais, verifica-se um
decréscimo da tensão de cedência com o aumento da temperatura [6] (Fig. 18).
σ
T
ε
Fig. 18-Dependência da tensão de cedência com a temperatura [24].
3.6. Combinação de Efeitos
Para os metais, a tensão de escoamento é simplesmente a tensão de cedência para o
estado uniaxial de tensão, expresso como uma função da temperatura, do estado de
deformação, da velocidade de deformação e da microestrutura. Genericamente, também é
referida como a tensão efectiva ou tensão equivalente representando um estado triaxial de
tensões. Assim, pode-se escrever:
(17)
σ = f (ε ,ε& ,T ,ϖ )
em que σ , é a tensão efectiva, ε é a deformação efectiva, ε& é a taxa de deformação
efectiva, T é a temperatura e, ϖ reflecte a estrutura metalúrgica do material.
Existem de facto algumas expressões cujo objectivo é determinar a influência que
cada um dos termos atrás referidos provoca no valor da tensão de cedência. Uma das
17
Teoria da Plasticidade
funções, baseada na equação de Arrhenius [24], foi proposta por Sellars-Tegart [23][37],
permitindo analisar a influência da temperatura e da taxa de deformação em simultâneo:
Z = ε& × exp
(
Q
R (T + 273)
)
(18)
em que Z é o parâmetro de Zener-Hollomon, Q representa uma energia de activação do
escoamento plástico, normalmente independente da temperatura e em muitos casos
independente do estado de deformação, R é a constante de Boltzmann (8,314 J/molºK) e T
é a temperatura em ºC.
Outra função para a tensão de cedência e que, contrariamente à de Sellars-Tegart,
tem em consideração o estado de deformação, através da deformação efectiva ε , é a
seguinte [37][38]:
(19)
σ = K f0 KT Kε Kε&
em que K f0 é um coeficiente que depende do metal, tomando por exemplo para o aço
inoxidável valores compreendidos entre 153 e 303, enquanto os restantes parâmetros são
funções com a seguinte forma:
KT = A1 exp ( −m1T )
(20.1)
Kε = A2ε m2
(20.2)
Kε& = A3ε& m3
(20.3)
Os parâmetros Ai e mi diferem de acordo com o tipo de metal. Por exemplo, para o aço
inoxidável tomam os seguintes valores [17]:
A1 = 17, 07 m1 = 0, 00284
A2 = 1, 647 m2 = 0, 217
A3 = 0, 789 m3 = 0,104
(21)
Existem ainda outras expressões que tentam combinar os vários efeitos que os
diferentes parâmetros possam provocar nas características de resistência, e que foram
estabelecidas para um determinado tipo de metais, como por exemplo a expressão de
ALSPEN, que é adequada para as ligas de alumínio [12]:
n
σ = c (α 0 + 0.001) ε& m
(22)
em que α0 é uma função dependente da deformação efectiva, e os coeficientes c, m e n são
funções não lineares dependentes da temperatura.
18
Teoria da Plasticidade
4. Lei da Decomposição
O comportamento elasto-plástico é caracterizado por uma resposta do material,
inicialmente elástica e, a partir de um determinado nível de tensão, por um comportamento
essencialmente plástico. O comportamento plástico do material é geralmente acompanhado
por uma invariância do seu volume.
σ
σ
σ Y = f (ε )
σY
σ Y0
εp
σ = σ Y0
σ Y0
ε
εp
a)
ε
b)
σ
σ Y = f (ε p )
σY
a) carregamento/descarregamento,
σ Y0
b) modelo elasto-perfeitamente plástico,
c) modelo elasto-plástico com
endurecimento.
εp
ε
c)
Fig. 19-Comportamento elasto-plástico obtido num ensaio de tracção.
Na Fig. 19(a) apresenta-se o comportamento típico, obtido com um provete de
material plástico e submetido a um teste uniaxial de tracção, com carregamento e
19
Teoria da Plasticidade
descarregamento. Os modelos normalmente utilizados simulam o comportamento elastoperfeitamente plástico (Fig. 19(b)) e elasto-plástico com endurecimento (Fig. 19(c)).
Na Fig. 20 mostra-se o modelo reológico unidimensional. Aplica-se uma força
(tensão σ), que provoca um alongamento do modelo (Δl), cujo resultado pode ser aferido
pela extensão causada:
ε=
Δl
l0
(23)
que comporta uma componente elástica e, uma componente plástica:
ε =ε e + ε p
E
(24)
σ Y0
σ
(1 + ε e ) L1
atrito
σ
(1 + ε p ) L2
Fig. 20-Modelo reológico elasto-plástico.
O comportamento do material, isto é, a extensão causada pelo carregamento é
elástica até um determinado ponto, denominado limite elástico (e a tensão que o provoca:
tensão limite elástico ou tensão de cedência - σ Y0 ), após o qual, o material apresenta
deformação plástica. No modelo da figura, o comportamento linear elástico é caracterizado
pela constante elástica da mola E traduzindo-se matematicamente pela expressão:
σ = E × ε e = E (ε − ε p )
(25)
A deformação plástica inicia-se quando a tensão aplicada atinge o valor da tensão de
cedência ( σ Y0 ). O modo como se estabelece esse valor da tensão aplicada, de modo a
compará-lo com a tensão de cedência, denomina-se critério de cedência. Na figura, a
tensão de cedência corresponde ao atrito entre as placas.
Atingida a tensão de cedência, este valor pode, ou não, manter-se constante com o
aumento de deformação. Se esse valor não depender do aumento da extensão plástica, dizse que o material tem um comportamento perfeitamente plástico. Se, pelo contrário, o
valor da tensão de cedência, aumentar com o crescimento da extensão plástica, diz-se que
o material está a sofrer um encruamento.
20
Teoria da Plasticidade
Nas formulações elasto-plásticas contidas neste texto, considera-se apenas as
pequenas deformações. De acordo com a teoria da elasticidade para as pequenas
deformações, tem-se o tensor das deformações definido do seguinte modo:
ε = ∇ su =
ε ij =
1
2
1
2
( ∇u + ( ∇u ) )
T
(u
i, j
(26.1)
+ u j ,i )
(26.2)
em que ∇u é o gradiente dos deslocamentos, e ∇ s u a sua parte simétrica.
Considere-se a barra representada na Fig. 21, cujo eixo axial coincide com o eixo
X=(1,0,0), e sobre a qual se tem como ponto de referência, a partícula com a abcissa 1 X ,
enquanto a extremidade esquerda coincide com a origem do referencial. Mantendo-se a
extremidade esquerda fixa, aplica-se sobre a outra extremidade um esforço normal de
tracção. Por facilidade de exposição considera-se apenas as variáveis (e suas derivadas)
relativas ao eixo coincidente com eixo axial da barra. Numa primeira fase o esforço normal
de tracção provoca uma extensão longitudinal da barra passando a referida partícula a
possuir a abcissa 2 X = 1 X + 1 u , pelo que sofreu um deslocamento na direcção axial de 1 u .
Na segunda fase aplica-se um segundo esforço normal de tracção passando a partícula a
ocupar a posição 3 X = 2 X + Δu = 1 X + 2 u , pelo que o ponto material sofreu um
deslocamento Δu.
1
X
1
2
X
u
X
Δu
2
3
u
X
Fig. 21-Lei da decomposição.
Para o processo referente à primeira fase da deformação, o gradiente de deformação,
e considerando apenas a sua componente não nula, vem:
F1,1′ =
X 1 X + 1u
u
=
=1 + 1
1X
1X
1X
2
(27)
21
Teoria da Plasticidade
Quanto à mesma componente referente à segunda fase, e considerando como configuração
inicial, a configuração final da fase anterior, tem-se:
F1,1′′ =
X 2 X + Δu
Δu
=
=1 +
2X
2X
2X
3
Se o estado final, isto é, a posição do ponto em
incremento, o gradiente de deformação viria:
F1,1 =
3
(28)
X , fosse atingida com um único
X
1X
3
(29)
O mesmo resultado se obtém multiplicando (27) por (28):
F1,1 = F1,1′ × F1,1′′ =
X 3X 3X
×
=
1X
2X
1X
2
(30)
a que corresponde a extensão total:
ε=3
X − 1 X 2u
=
1X
1X
(31)
Considerando as normas dos deslocamentos 1 u e 2 u muito reduzidas, quando comparadas
com a dimensão 1 X , a extensão em cada uma das fases é a seguinte:
ε′=
2
ε ′′ = 3
X − 1 X 1u
=
1X
1X
(32)
X − 2 X Δu
=
1X
1X
(33)
Adicionando as extensões de cada fase resulta:
ε = ε ′ + ε ′′ = 2
X − 1 X 3 X − 2 X 3 X − 1 X 2u
+
=
=
1X
1X
1X
1X
(34)
ou seja, obteve-se o valor da extensão total calculado como se de uma só fase se tratasse.
A multiplicação efectuada em (30) designa-se por lei da decomposição
multiplicativa, enquanto que a adição efectuada em (34) é denominada de lei da
decomposição aditiva. Deve-se notar que o cálculo da extensão, ε″, só é válido para
pequenas deformações, pelo que em pequenas deformações pode-se aplicar a lei da
decomposição aditiva, enquanto que para grandes deformações pode ser vantajoso utilizar
a lei multiplicativa [31][32].
22
Teoria da Plasticidade
Fazendo coincidir a primeira fase com o domínio elástico, vindo a segunda fase a
ocorrer no domínio plástico, ter-se-á formalmente para o Tensor das Deformações ε , e
para o gradiente de deformação, F:
F = FeF p
(35.a)
Fi , j = Fi ,ej F jp,i
(35.b)
ε = εe + ε p
(36.a)
ε ij = ε ije + ε ijp
(36.b)
Assim, numa formulação elasto-plástica envolvendo pequenas deformações, é habitual
decompor-se o tensor das extensões numa componente elástica e, numa componente
plástica, pelo que se torna conveniente estabelecer modelos matemáticos, que traduzam os
fenómenos físicos da elasticidade e da plasticidade, separadamente.
O comportamento elástico é descrito pela teoria da elasticidade, importando agora
definir o modelo matemático para a componente plástica das deformações. Com esse
objectivo, três aspectos devem ser considerados:
i)
Um critério de cedência indicando o nível de tensão, em termos do tensor das
tensões, de modo a analisar-se o início da plastificação;
ii) Uma lei de encruamento, descrevendo, se e como, o critério de cedência depende
do grau de deformação plástica, depois de se iniciar a plastificação;
iii) Uma regra de escoamento, definindo a relação entre tensão e deformação pósplastificação, comportando a deformação total, as componentes elástica e plástica.
5. Funções de Cedência
O aparecimento do comportamento plástico é condicionado por um critério de
cedência, que na sua forma mais geral, pode ser formulado do seguinte modo:
F ( σ, α′ ) = 0
(37)
em que α′ indica um conjunto de variáveis de endurecimento e σ é o tensor das tensões.
Para um material isotrópico, em que a cedência plástica dependa unicamente da grandeza
das tensões principais, e nunca das suas orientações no espaço das tensões, a função
escalar F torna-se apenas dependente de um valor escalar, conhecido por parâmetro de
encruamento -α:
23
Teoria da Plasticidade
F ( σ, α ) = f ( σ ) − σ Y (α ) = 0
(38)
em que f (σ ) é a função de cedência. Esta função pode tomar várias formas analíticas com
representação geométrica no espaço distintas. Tratando-se de uma função de tensão pode
assumir-se como espaço para a respectiva representação geométrica, o espaço de tensões
de Westergaard [3], em que três eixos mutuamente ortogonais são coincidentes com as
direcções principais de tensão (ver Fig. 22).
σ3
P
O′
P″
P′
σ2
O
f (σ )
σ1
σ1 =σ 2 =σ 3
Fig. 22-Espaço de Westergaard.
Considere-se um ponto material com um estado uuur
de tensão representado pelo ponto P
e resultante de um incremento traduzido pelo vector OP . Este vector é decomposto num
uuuur
vector com a direcção OO′ ( OP′ ), que coincide com o eixo em que as três tensões
principais tomam o mesmo
valor, e num outro cuja linha de acção se encontra sobre o
uuuur
plano normal a OO′ ( OP′′ ). No caso de se admitir que a pressão hidrostática não tem
qualquer efeito na uuuu
cedência
do material, esta dependerá somente da intensidade, direcção e
r
sentido do vector OP′′ , ou seja, das tensões de desvio.
Admitindo que a função de cedência é independente do referencial escolhido
então possível expressá-la em função dos três invariantes das tensões:
I1 = tr ( σ ) = σ ii
ndim
,é
(39.1)
24
Teoria da Plasticidade
I2 =
I3 =
1
2
1
3
tr ( σ 2 ) =
1
2
σ ijσ ji
(39.2)
tr ( σ 3 ) = 13 σ ijσ jkσ ki
(39.3)
Com base em observações experimentais, é possível concluir que a deformação
plástica, ou seja, a função de cedência dos metais, não depende da pressão hidrostática, p
[5][22]. Consequentemente, a partir da definição das tensões de desvio,
s = dev ( σ ) = σ − 13 tr ( σ ) I 2
(40.a)
sij = σ ij − 13 σ kk δ ij
(40.b)
a função de cedência apenas depende do segundo e terceiro invariantes das tensões de
desvio:
J2 =
J3 =
1
2
1
3
tr ( s 2 ) =
tr ( s3 ) =
sij s ji
(41.1)
sij s jk ski
(41.2)
1
2
1
3
Com base nestes dois invariantes é possível estabelecer um outro, cuja interpretação
geométrica se verá adiante:
θ =
⎛ 3 3 × J3 ⎞
1
sen −1 ⎜ −
⎟ ;
⎜ 23 J ⎟
3
2 ⎠
⎝
⎡ π
π⎤
θ ∈ ⎢− , + ⎥
6⎦
⎣ 6
(42)
Outra forma de representação geométrica da superfície de cedência é através das
projecções ortogonais dos eixos das tensões no plano normal a OO′. Na Fig. 23
encontram-se representadas duas superfícies de cedência: uma corresponde, no espaço das
tensões principais, a um cilindro; outra, no mesmo espaço, corresponde a um prisma. O
plano de corte dos objectos geométricos, e que coincide com o plano do papel designa-se
plano do desviador.
σ3
σ1
σ2
25
Teoria da Plasticidade
Fig. 23-Projecção de duas superfícies de cedência no plano do desviador.
Atendendo a (38) pode-se concluir que, se num determinado ponto de um corpo
material deformável, se verificar a inequação f (σ ) < σ Y (α ) , o corpo nesse ponto
apresentará um comportamento elástico. Se, por outro lado, se verificar a igualdade
f (σ ) = σ Y (α ) , o comportamento será plástico. Atingido este estado, o comportamento
subsequente desse ponto material, será condicionado pela variação de f relativamente a σ ,
T
⎛ ∂f ⎞
df = ⎜ ⎟ dσ + L
⎝ ∂σ ⎠
(43)
em que ∂f ∂σ é um vector normal à superfície de cedência (ver Fig. 24) encontrando-se
as componentes do tensor das tensões agrupadas sob a forma de um vector ( σ ), bem como
as respectivas variações ( dσ ).
σ2
∂f
∂σ
∂f
∂σ 2
∂f
∂σ 1
σ1
Fig. 24-Condição de ortogonalidade no espaço das tensões σ1-σ2.
De um modo sucinto, pode-se concluir o seguinte:
¾ Se df < 0, indica que se está perante uma situação de descarregamento
elástico. O estado de tensão situa-se no interior da superfície de cedência,
retomando o material, um comportamento elástico;
¾ Se df = 0, indica que o estado de tensão atingiu a superfície de cedência, o que
corresponde a um regime plástico, se o material apresentar comportamento
perfeitamente plástico (α constante);
26
Teoria da Plasticidade
¾ Se df > 0, indica que o estado de tensão se mantém sobre a superfície de
cedência, não se mantendo esta constante. É o que acontece no
comportamento dum material com encruamento.
Dado que os mecanismos de rotura são diferentes entre gamas de materiais
diferentes, não existe um critério de cedência universal para todos os materiais. Por
exemplo nos materiais correntemente utilizados, é usual distinguir-se os materiais frágeis
dos materiais dúcteis, pelo que os critérios de cedência a aplicar, nuns e noutros, não
coincidem.
5.1. Critério da Tensão Normal Máxima
Um dos primeiros critérios a ser estabelecido, até pela natureza do estado de tensão
existente no ponto central da secção média do provete utilizado no ensaio de tracção, foi o
critério da tensão normal máxima. Segundo este critério a cedência ocorre quando o estado
de tensão num ponto material conduz a uma tensão normal máxima que iguala o valor da
tensão normal máxima verificada para o ponto de cedência no ensaio de tracção. Em
termos de função de cedência, este critério equivale à seguinte função:
F ( σ, α ) = σ 1 − σ Y (α )
σ3
O
(44)
σ1 =σ 2 =σ 3
σ2
σ1
Fig. 25-Superfície de cedência para a tensão normal máxima.
Em função dos invariantes anteriormente definidos pode-se ainda escrever:
27
Teoria da Plasticidade
F ( σ, α ) =
I1 2
J 2 × sen (θ + 23 π ) − σ Y (α )
+
3
3
(45)
5.2. Critério de Tresca
Este critério, postulado por Tresca em 1864 [44], baseado em resultados
experimentais, admite por hipótese, que a deformação plástica num ponto material, ocorre
sempre que a tensão tangencial máxima atinge um determinado valor limite. Esta condição
pode ser representada, em função das tensões principais, pelas expressões:
σ 1 − σ 2 ≤ σ Y (α ) = Y (α )
(46.1)
σ 1 − σ 3 ≤ σ Y (α ) = Y (α )
(46.2)
σ 2 − σ 3 ≤ σ Y (α ) = Y (α )
(46.3)
em que Y(α) é uma função característica do material obtida com base no ensaio de tracção
uniaxial, e que depende da deformação plástica. Esta variação pode ser quantificada em
função do parâmetro de endurecimento, α. Num ponto material, que se encontre no estado
elástico de deformação, deve-se verificar todas as condições (46) com o sinal de
desigualdade, enquanto que em regime plástico se deve verificar a igualdade para uma ou
duas das proposições. Graficamente, as expressões (46) definem, no espaço das tensões
principais, um prisma hexagonal regular e infinitamente longo, cujo eixo σ 1 = σ 2 = σ 3 é
perpendicular ao plano do desviador, Π, representado pela equação (ver Fig. 26) [35]:
σ1 + σ 2 + σ 3 = 0
(47)
28
Teoria da Plasticidade
σ3
von Mises
Tresca
Plano do
Desviador
σ2
σ1
σ1 =σ 2 =σ 3
Fig. 26-Representação gráfica das superfícies de cedência de Tresca e von Mises.
Como se pode observar da figura, a projecção do prisma, representativo da superfície
de cedência do critério de Tresca, no plano do desviador é um hexágono regular. O critério
de Tresca apresenta a dificuldade no cálculo de ∂f ∂σ , nas regiões de singularidade (faces
no modelo 3D e pontos no modelo 2D) existentes na respectiva superfície [51].
Este critério tem a seguinte representação matemática:
F ( σ, α ) = (σ 1 − σ 3 ) − σ Y (α )
para
σ1 > σ 2 > σ 3
F ( σ,α ) = 2 cos θ × J 2 − σ Y (α )
(48.1)
(48.2)
5.3. Critério de Mohr-Coulomb
Nos materiais frágeis a rotura verifica-se mediante a ausência de qualquer
deformação plástica prévia, pelo que no gráfico resultante do ensaio de tracção não é
visível um ponto que se identifique como um ponto de cedência. Por outro lado, parte dos
29
Teoria da Plasticidade
materiais frágeis apresentam a particularidade de apresentarem diferentes valores
característicos de resistência quando sujeitos a esforços de tracção ( σ T ) e de compressão
( σ C ). Este facto pode explicar-se pela existência de inclusões e vazios eventualmente
existentes no corpo material que provocam uma diminuição da resistência à tracção, pois
na vizinhança desses "defeitos" verifica-se a existência de elevados gradientes de tensão.
Ao contrário, quando submetidos a esforços de compressão, verifica-se alguma tendência
para um aumento da resistência à compressão, já que os vazios eventualmente existentes
tendem a ser colmatados.
Admita-se os círculos de Mohr (ver Fig. 27) representativos dos estados de tensão
limites para o caso de solicitações simples de tracção ( σ T ) e de compressão ( σ C ).
τ
σC
σT
σ
Fig. 27-Domínio de segurança segundo o critério de Mohr-Coulomb.
Resultados experimentais permitem concluir que, em aplicações cujas solicitações
conduzam a estados de tensão triaxiais, existe uma curva envolvente, em parte constituída
pelo lugar geométrico dos círculos intermédios (curva a traço-ponto na figura). Considerese um estado de tensão, cujo par de coordenadas no círculo de Mohr é ( σ 0 , τ 0 ) provocando
a cedência do material (Fig. 28).
τ
B
A
τ = φ (σ )
τ 0 = φ (σ 0 )
τ
σ3
σ
τ0
σ0
σ1
σ
Fig. 28-Círculo de Mohr-Coulomb.
A curva envolvente pode ser expressa matematicamente como uma função do tipo:
30
Teoria da Plasticidade
τ 0 = φ (σ 0 )
(49)
A variações sucessivas no estado de tensão e que provocam a deslocação do ponto A sobre
a envolvente, correspondem outros pontos relativos à tensão tangencial máxima (B)
constituindo outra curva cujas equações paramétricas são:
τ = φ (σ 0 ) 1 +
( )
σ = σ 0 + φ (σ 0 )
∂φ
∂σ 0
2
∂φ
∂σ 0
(50.1)
(50.2)
as quais por eliminação de σ 0 conduzem a uma equação τ = f (σ ) .
A primeira condição de cedência baseada no círculo de Mohr foi proposta por
Coulomb em 1773 e baseia-se na hipótese de que as deformações plásticas ocorrem por
escorregamento existindo uma relação linear entre σ 0 e τ 0 :
τ 0 = c − σ 0 × tangψ
(51)
em que c representa a coesão e ψ representa o ângulo de atrito interno. Substituindo (51)
em (50) e eliminando σ 0 obtém-se:
τ = cosψ × ( c − σ × tangψ )
(52)
Esta condição de cedência é representada no espaço de Westergaard por uma
superfície de cedência, cuja representação geométrica corresponde a uma pirâmide
hexagonal, e designa-se superfície de cedência de Mohr-Coulomb:
F ( σ, α ) =
1
1
(σ 1 − σ 3 ) − ⎛⎜ c × cosψ − (σ 1 + σ 3 ) × senψ ⎞⎟
2
2
⎝
⎠
(53)
No caso particular do material apresentar um ângulo de atrito interno igual a zero
(ψ=0) resulta a seguinte superfície de cedência:
F ( σ, α ) =
1
(σ 1 − σ 3 ) − c
2
(54)
A comparação de (48) com (54) permite concluir que o critério de Tresca é um caso
particular do critério de Mohr-Coulomb com σ Y (α ) = 2 × c . De facto, no espaço de
Westergaard a superfície de cedência de Tresca corresponde a um prisma, enquanto a de
Mohr-Coulomb corresponde a uma pirâmide. No entanto, qualquer uma destas superfícies
apresenta arestas vivas que no caso de estados de tensão complexos tornam o seu
tratamento analítico ou numérico de complicada resolução.
31
Teoria da Plasticidade
Do ponto de vista analítico, a curva envolvente representada no semi-eixo positivo
das ordenadas é substituída por uma recta tangente aos círculos limites. Na Fig. 29
encontra-se representado o limite de segurança estabelecido com base no critério de MohrCoulomb, mas com a envolvente substituída pelo segmento de recta FH . O estado de
tensão em análise está representado pelo círculo de Mohr a traço fino sendo a tensão
normal máxima σ 1 e a tensão normal mínima σ 3 . Do ponto de vista prático interessa
estabelecer uma relação entre o estado de tensão actual, isto é, σ 1 e σ 3 , com os valores
limites σ C e σ T .
τ
σC
σ3
A
B
D
σT
C
σ1
0
E
H
G
F
σ
Fig. 29-Domínio de segurança simplificado do critério de Mohr-Coulomb.
Com base características geométricas observadas na figura é possível estabelecer as
seguintes relações:
BE = BG − EG =
σ1 − σ 3 σ T
σC
AD = AF − DF =
CB = C0 + 0B =
−
2
2
σT
2
CA = C0 + 0A =
−
σT
2
−
2
σT
2
σ1 + σ 3
2
+
σC
2
(55.1)
(55.2)
(55.3)
(55.4)
Pela semelhança dos triângulos CBE e CAD obtém-se a seguinte relação:
BE CB
=
AD CA
ou, em função dos valores de tensão
(56)
32
Teoria da Plasticidade
σ1 − σ 3 − σ T
σ T − σ1 − σ 3
σ
σ1
=
⇒
− C3 = 1
C
T
T
C
T
σ −σ
σ +σ
σ
σ
(57)
De notar que nesta expressão os valores limites σ C e σ T entram em valor absoluto
enquanto as tensões principais relativas ao estado de tensão tomam o seu valor algébrico.
O critério de Mohr-Coulomb é utilizado para representar o comportamento dos
materiais granulosos dotados de atrito interno, tendo-se no entanto verificado que estes
materiais atingem em geral um estado de cedência plástica à tracção antes de se ter
atingido a superfície de Mohr-Coulomb. Com o objectivo de ter em conta estes resultados,
Prandtl propôs em 1921 uma superfície de cedência obtida a partir da de Mohr por
substituição do vértice da pirâmide por uma superfície parabólica, conhecida por superfície
de cedência de Mohr-Prandtl e que se pode representar matematicamente pela seguinte
função:
1
1
2
⎛
⎞
F ( σ,α ) = (σ 1 − σ 2 ) − c ⎜1 − ( tangψ ) − (σ 1 + σ 3 ) × tangψ ⎟
2
c
⎝
⎠
1
2
(58)
5.4. Critério de Beltrami
Para determinado tipo de materiais verifica-se que o início do comportamento
plástico está relacionado com a quantidade de energia de deformação elástica por unidade
de volume (U0) que um corpo pode armazenar. A energia de deformação elástica por
unidade de volume pode ser calculada a partir dos tensores de extensão e tensão:
U0 =
1
σ ijε ij
2
(59)
Atendendo aos conceitos de dilatação média ( ε m ) e extensão de desvio ( ε d ),
εm =
1
ε ii
3
ε ijd = ε ij − ε mδ ij
(60)
(61)
bem como aos conceitos de tensão de desvio (s) e tensão média ( σ m ), obtém-se por
intermédio da lei de Hooke as seguintes relações:
33
Teoria da Plasticidade
εm =
ε ijd =
σm
(62)
3k
sij
(63)
2μ
em que, μ é um dos parâmetros de Lamé (numericamente igual ao módulo de elasticidade
transverssal-G) e k é o módulo de expansão volumétrica:
μ =
E
2 (1 + ν )
(64)
k =
E
3 (1 − 2ν )
(65)
Substituindo (62) e (63) em (61) obtém-se o tensor das extensões em função da tensão
média e do tensor das tensões de desvio:
ε ij =
sij
2μ
+
σm
3k
δ ij
(66)
que substituindo em (59) permite rescrever a expressão para o cálculo da energia de
deformação por unidade de volume:
U0 =
⎞
1 ⎛ 1
1
σ ij ⎜
sij + σ mδ ij ⎟
2 ⎝ 2μ
3k
⎠
(67)
ou ainda, apenas em função do tensor das tensões de desvio e da tensão média:
U0 =
1
1
sij sij + σ m2
12μ
2k
(68)
É ainda usual escrever-se a expressão da energia de deformação em função do segundo
invariante das tensões de desvio (J2) expresso em (41):
U0 =
1
1
J 2 + σ m2
2μ
2k
(69)
Beltrami apresentou em 1885 [4] um critério de cedência que estabelece para o início
da deformação plástica o estado de tensão que corresponde a um valor crítico da energia de
deformação elástica por unidade de volume:
F ( σ, α ) =
1
1
J 2 + σ m2 − U 0 critico
2μ
2k
(70)
34
Teoria da Plasticidade
Este valor crítico pode ser obtido para uma estado de tensão uniaxial, resultante do ensaio
de tracção:
U 0 critico
σ Y2 (α ) σ Y2 (α )
=
+
6μ
18k
(71)
obtendo-se a função de cedência em função da tensão de cedência:
F ( σ, α ) =
⎛ 1
1
1
1 ⎞ 2
+
J 2 + σ m2 − ⎜
⎟ σ Y (α )
2μ
2k
⎝ 6μ 18k ⎠
(72)
No espaço de Westergaard esta condição de cedência representa-se por uma
superfície elíptica com simetria circular em relação ao eixo hidrostático.
5.5. Critério de von Mises
Von Mises formulou um critério de cedência em 1913 [46], sugerindo que a cedência
ocorre quando o segundo invariante das tensões de desvio J 2 atinge um valor crítico:
J2 −
1
2
Φ (α ) = 0
(73)
em que Φ (α ) , dependente do parâmetro de endurecimento (α) é o raio da superfície de
cedência. Devido à dependência de J 2 , a teoria da plasticidade que utiliza este critério em
conjunto com a lei associativa é referida na literatura como a teoria do escoamento J 2 .
35
Teoria da Plasticidade
σ 2 -σ 3
σ3
von Mises
(J2=constante)
Tresca
(τmáx=constante)
σ 1 -σ 3
θ
σ1
σ2
(a)
(b)
Fig. 30-Representação das projecções das superfícies dos
critérios de Tresca e de von Mises.
Como se verá à frente, para o ensaio de tracção, Φ (α ) =
2
3
σ Y , pelo que a tensão
efectiva, σ , em termos do tensor das tensões de desvio, vem:
σ = 3J 2 = 3 2 s :s = 3 2 sij sij
(74)
resultando finalmente para a condição (73):
σ -σ Y (α ) = 0
(75)
Existem duas interpretações físicas possíveis para o critério de von Mises. Uma,
dada por Nadai (em 1937), que introduziu o conceito de tensão de corte octaédrica,
τ oct = 2 3 J 2 , que é a tensão de corte nos planos do octaedro regular, cujos vértices
coincidem com os eixos principais de inércia [13]. Outra interpretação, dada por Hencky
(em 1924), mostra que a cedência ocorre quando a energia elástica de distorção atinge um
valor crítico [18].
A interpretação de Hencky percebe-se rapidamente se se atender à expressão (69)
para o cálculo da energia de deformação elástica por unidade de volume. De facto, nesta
expressão, que contém duas parcelas, a primeira estabelece a energia de deformação
associada à energia de deformação elástica de distorção, enquanto a segunda estabelece a
energia de deformação associada à dilatação. Substituindo (65) em (69) resulta:
36
Teoria da Plasticidade
3 (1 − 2ν ) 2
1
J2 +
σm
2μ
2E
U0 =
(76)
Por definição do módulo de expansão volumétrica, em elasticidade a condição de
incompressibilidade é garantida pela imposição de ν = 0,5, resultando um valor nulo para a
segunda parcela, pelo que a função de cedência vem:
F ( σ, α ) =
1
1 2
J2 −
σ Y (α ) = 0
2μ
6μ
(77)
Combinando (75) com (77) obtém-se a seguinte expressão para a tensão efectiva:
(78)
σ = 3J 2
concluindo-se deste modo que o critério de von Mises é uma caso particular do critério de
Beltrami e aplicável a materiais cuja energia de deformação volúmica se pode considerar
desprezável.
Da figura anterior, pode-se verificar que os critérios de Tresca e von Mises
apresentam a sua máxima diferença para o caso do corte puro ( σ 3 = −σ 1 , σ 2 = 0 ),
resultando da aplicação de cada um dos critérios:
σ Tresca = σ 1 − σ 3 = 2σ 1
σ
von Mises
=
1
2
( (σ − σ )
1
2
2
+ (σ 2 − σ 3 ) + (σ 3 − σ 1 )
2
(79)
2
)=
3σ 1
(80)
Combinando estas duas expressões, pode-se concluir que a tensão efectiva calculada por
aplicação do critério de Tresca pode ser 2 / 3 ≈ 1,15 vezes maior que a obtida pelo
critério de von Mises, permitindo concluir que, o critério de Tresca é mais conservativo
que o de von Mises.
5.6. Critério de Drucker-Prager
Ainda para aplicação ao comportamento de materiais granulosos dotados de atrito
interno existe uma outra função de cedência utilizada com alguma frequência e que
corresponde à superfície de cedência de Drucker-Prager cuja expressão matemática é a
seguinte [10]:
37
Teoria da Plasticidade
(
F = 3ασ m + J 2 − k ′ = 0
(81)
(
em que os coeficientes α e k ′ são constantes do material e que dependem do ângulo de
atrito interno (ψ) e da coesão (c):
α =
(
2 × senψ
3 × ( 3 − senψ )
(82.1)
k′ =
6c × cosψ
3 × ( 3 − senψ )
(82.2)
No espaço de Westergaard a superfície representativa do critério de Drucker-Prager
representa-se por um cone de revolução em torno do eixo hidrostático ( σ 1 = σ 2 = σ 3 ).
5.7. Critério de Green
Para materiais com fendas interiores ou materiais porosos, Green apresentou uma
superfície de cedência que é função do coeficiente de porosidade do material [16]:
F =
(
3
2
( ))
(
× ln β
2
2
(
4
⎛
⎞
σ + 3 × ⎜ 3− 2×3 (β ⎟ J 2 − σ Y
3(1− β )
⎝
⎠
2
m
(83)
(
em que β é o coeficiente de porosidade sendo definido do seguinte modo:
(
β =
volume de vazios
volume total
(84)
6. Regra do Encruamento
A regra do encruamento estabelece as condições para que um novo escoamento
plástico possa ocorrer, depois de se ter atingido o estado plástico do material. Esta situação
verifica-se em virtude da superfície de cedência poder sofrer contínuas alterações à medida
que se dá o escoamento plástico.
38
Teoria da Plasticidade
Na expressão (37) introduziu-se um conjunto de variáveis de endurecimento contidas
num vector, α′ . Basicamente, existem dois tipos de aproximações para a dependência de
qualquer variável interna de endurecimento α i′ ∈ α′ , (1 ≤ i ≤ nendurecimento ) [38]:
i) Se uma variável de endurecimento é assumida como dependente da
deformação plástica efectiva, isto é, α i′ = α i′(ε p ) , diz-se que ocorre deformação
com encruamento, em que a deformação plástica efectiva, ε p , é definida do
seguinte modo [27][49]:
εp=
2
3
εp :εp =
2
3
ε ijpε ijp
(85)
Esta deformação plástica efectiva «reflecte a história» do processo de
deformação plástica, na medida em que estabelece que o endurecimento é
determinado por cada parcela infinitesimal de deformação plástica, e não
simplesmente pelo seu estado inicial e final:
ε
p
=
∫ dε
dε p
dt =
= ∫
dt
0
t
p
ε ijp
∫(
2
3
dε ijp dε ijp )
12
(86)
0
ii) A segunda possibilidade designa-se por endurecimento energético, e relaciona
a variável de endurecimento com o trabalho plástico total, α i′ = α i (W p ) , em que
[1]:
ε ijp
εp
W = ∫ σ : dε = ∫ σ ij dε ijp
p
p
0
(87)
0
Segundo Nayak e Zienckiewicz [30] para o caso dos materiais em que seja possível
aplicar o critério de von Mises, os dois modelos de endurecimento descritos são
equivalentes, ou seja, as curvas obtidas no ensaio de tracção conduzem ao mesmo nível de
encruamento.
A variação da superfície de cedência pode ser classificada, de acordo com três
modelos elementares [18]:
¾
Se a superfície de cedência subsequente, provocada pelo incremento de
deformação plástica, é exclusivamente uma expansão uniforme da superfície de
cedência precedente, o modelo de encruamento é designado de isotrópico [22].
Para o caso bidimensional, exemplifica-se na Fig. 31(a). Este modelo, proposto
por Odquist [33] apresenta como principal vantagem, a sua simplicidade, não
conseguindo, no entanto, reproduzir determinados aspectos reais da deformação
de alguns materiais, como por exemplo o efeito de Bauschinger [9].
39
Teoria da Plasticidade
¾
Se a superfície de cedência subsequente, mantiver a mesma forma, mas
simplesmente for transladada no espaço das tensões como um corpo rígido, o tipo
de encruamento diz-se cinemático (ver Fig. 31(b)) [20][35][42]. Este modo de
encruamento, apresentado inicialmente por Prager, surgiu com o objectivo de
modelar um fenómeno bem visível experimentalmente, o efeito de Bauschinger,
muito corrente em materiais sujeitos a regimes de carregamento cíclico.
¾
Endurecimento distorcional, em que se admite a expansão, a translação e a
rotação da superfície de cedência, ou inclusive a mudança de forma [11].
Superfície
de cedência
corrente
τ
Superfície
de cedência
corrente
Superfície de
cedência inicial
τ
Superfície de
cedência inicial
σ
Fig. 31- (a) Encruamento isotrópico
σ
(b) Encruamento cinemático
Com o objectivo de modelar matematicamente os dois primeiros modos de
encruamento, admite-se que a escolha das variáveis de endurecimento no vector α′ , pode
ser a seguinte:
α′T =
{
ε p , σb (ε p )
}
(88)
em que, o valor escalar da deformação plástica efectiva ε p é suficiente para a definição de
qualquer tipo de endurecimento isotrópico, enquanto que o tensor, σ b , usualmente
conhecido por tensor das tensões de recuperação [38], é necessário para a descrição do
endurecimento cinemático. A tensão de recuperação observa-se graficamente pela
translação no espaço das tensões do centro da superfície de cedência, tendo portanto a
mesma dimensão do tensor das tensões.
A expressão (38) pode ser reformulada, adicionando o encruamento cinemático e,
assumindo para o endurecimento isotrópico, a igualdade α = ε p , resultando:
40
Teoria da Plasticidade
(
F ( σ, α′ ) = f σ − σ b ( ε
p
) ) − σ (ε )
p
Y
= 0
(89)
Com base em (89), importa definir as leis para o encruamento isotrópico e para o
encruamento cinemático. Para o encruamento isotrópico, pode-se admitir uma função,
dependente simplesmente, do valor de início da plastificação σ Y0 e, de uma função
unicamente dependente da deformação plástica efectiva [35]:
σ Y = σ Y0 + h ( ε p )
(90)
exprimindo-se a lei do encruamento isotrópico do seguinte modo:
dσ Y = H ′ ( ε
p
) dε
(91)
p
em que, H ′ é a derivada da função geral h, relativamente a ε p .
Além do comportamento perfeitamente plástico, isto é, h ≡ 0 , em aplicações práticas
assume-se normalmente outras duas hipóteses [38]:
σ Y = σ Y0 + H ε p
)
(92)
(
σ Y = σ Y0 + ( H ∞ − H 0 ) 1 − exp ( − nε ε p )
)
(93)
)
em que, H, H ∞ , H 0 e nε nε, são constantes do material.
O encruamento cinemático é mais complexo de definir, pois não é um valor escalar.
É necessário expressar o incremento escalar e a direcção para o incremento da tensão de
recuperação, o que pode ser feito da seguinte maneira [1][38]:
dσ b =
2 )
K ′ (ε
3
p
)
dε
p
∂F
∂σ k
(94)
em que:
σ k = σ − σb
(95)
A função de cedência F é, à priori, assumida como o potencial na validação da
variável interna do encruamento cinemático, o que leva à conhecida lei associativa do
escoamento plástico. Na prática, o encruamento cinemático é assegurado como sendo
)
linearmente dependente de ε p , ou seja, K ′ ( ε p ) = K ′ ≡ constante em (94).
Também são possíveis modelos numéricos combinando os dois encruamentos. Os
termos lineares de ambas as leis podem ser expressos por H e β ′ em vez de H e K ′
[2][38]:
41
Teoria da Plasticidade
σ Y = σ Y0 + β ′H ε p
(96.1)
K ′ = (1 − β ′ ) H
(96.2)
em que β ′ é uma constante, β ′ ∈
[
0 , 1 ].
Tendo em atenção novamente o ensaio de tracção, mostra-se na Fig. 32 uma curva
típica de um ensaio de tracção dum provete metálico. A curva resulta das medidas de σ 1 e
ε1 , em que o índice 1 indica a direcção para a primeira direcção principal.
σ
dσ
ET
dε p
dε e
dε
σ Y0
E
τ
Fig. 32-Curva tensão-deformação de um ensaio de tracção uniaxial.
Importa agora mostrar que para além da relação entre σ 1 e ε1p , o mesmo gráfico
também representa a relação entre os valores efectivos do estado de tensão e do
correspondente estado de deformação, ou seja, σ -ε p .
No ensaio de tracção tem-se, por hipótese, σ 1 ≠ 0 e σ 2 = σ 3 = 0 , vindo a tensão
média σ m = σ ii 3 = σ 1 3 . As tensões de desvio segundo as direcções principais são:
42
Teoria da Plasticidade
s1 =
2
3
σ1;
s2 = s3 = − 13 σ 1
(97)
Utilizando o critério de von Mises e por conseguinte, substituindo estas tensões de desvio
na expressão para o cálculo da tensão efectiva (74), obtém-se:
σ =
3
2
( s1 s1 + s2 s2 + s3 s3 )
= σ1
(98)
De modo análogo para a deformação plástica efectiva, em que se assume a
incompressibilidade do material (ν=0,5), e consequentemente, as outras duas deformações
plásticas principais são ε 2p = ε 3p = -0,5ε1p , resultando:
εp=
2
3
(ε
ε + ε 2p ε 2p + ε 3p ε 3p ) = ε1p
p p
1 1
(99)
Então, para que a expressão que relaciona σ -ε p , seja válida para σ 1 -ε1p , pode-se
relacionar facilmente σ 1 com ε1p , e assumir essa relação como válida para o caso geral
σ -ε p , isto é [35]:
H ′ (ε
p
)=
dσ 1
dσ
=
p
dε
d ε1p
(100)
A tangente local à curva tensão-deformação, ET , calcula-se a partir da curvatura obtida no
ensaio:
ET =
dσ 1
dσ
=
dε
d ε1
(101)
O módulo de encruamento pode-se obter, em função desta tangente, do seguinte
modo:
dσ 1
dσ 1
dσ 1
d ε1
ET
ET
=
=
=
=
H ′ (ε p ) =
p
e
e
dσ 1 E 1 − ET E
d ε1
d ε 1 − d ε1
dε
1− 1 1−
d σ 1 ET
d ε1
(102)
Conclui-se assim, que a função de encruamento H ′(ε p ) , necessária para uma
implementação numérica, pode ser obtida a partir do ensaio de tracção uniaxial.
Note-se ainda, que no domínio elástico se tem no ensaio a seguinte relação tensãodeformação:
43
Teoria da Plasticidade
dσ 1e
E= e
d ε1
(103)
7. Teoria do Escoamento Plástico
No estudo do comportamento dos materiais em regime plástico existem duas
formulações em que se baseiam as relações constitutivas:
Teoria incremental
- admite a influência da trajectória de carregamento e
portanto relaciona o tensor das tensões aos
incrementos de deformação plástica;
Teoria da deformação total
- relaciona o tensor das tensões com o tensor das
extensões.
A primeira formulação (teoria incremental) serve de base à denominada teoria do
escoamento plástico, enquanto que a segunda (teoria da deformação total) suporta a teoria
da deformação plástica. De uma forma geral, o estado de deformação plástico depende da
trajectória do carregamento, coincidindo ambas as teorias para o caso em que o
carregamento apresenta uma trajectória linear. Todavia, a teoria da deformação plástica,
embora ignore a influência da trajectória de carregamento, é frequentemente utilizada, pois
a sua aplicação simplifica consideravelmente a solução de problemas em plasticidade.
A teoria do escoamento plástico baseia-se em alguns princípios que são descritos
seguidamente.
7.1. Postulado de Drucker
Se o material no ensaio de tracção atingir a tensão de cedência, passa a ter um
comportamento plástico, sendo a parcela da energia acumulada denominada energia
plástica. A energia elástica (associada ao processo de deformação elástico) de deformação
é totalmente recuperável, designando-se esse processo conservativo. Relativamente à
energia associada a um comportamento plástico, esta não se pode designar por processo
conservativo, pois devido a fenómenos de origem térmica e/ou de contacto a nível atómico,
o processo é dissipativo. Tendo como objectivo tratar esses fenómenos de uma maneira
44
Teoria da Plasticidade
sistemática e passível de modelação surgiram o postulado de Drucker e a regra da
normalidade [7].
Admitindo que o encruamento do material por deformação pode ser descrito como
uma função do estado de tensão e da deformação plástica na forma infinitesimal pode-se
considerar as seguintes relações [24]:
σε p > 0 → processo de encruamento
(104.1)
σε p = 0 → material perfeitamente plástico
(104.2)
σε p < 0 → processo de amaciamento
(104.3)
que para um ensaio de tracção (estado uniaxial de tensão) podem ser representados pelo
gráfico da Fig. 33.
σ
εp >0
σ =0
σ <0
σ >0
ε
σ <0
σ >0
σ =0
εp <0
Fig. 33-Postulado de Drucker: ilustração para um estado uniaxial.
Para um ponto material submetido a um estado de tensão σ e a um estado de
deformação plástico ε p , o produto σε p corresponde, em termos dimensionais, à energia
por unidade de volume. Considere-se então um estado de tensão uniaxial cujo valor é σ a
que corresponde a deformação plástica ε p . Admita-se um incremento de carga, que
conduz a um incremento de tensão (dσ), provocando um incremento de deformação dε, o
qual pode ser decomposto numa componente elástica dε e e, numa plástica dε p (sendo
45
Teoria da Plasticidade
portanto o incremento total de deformação: dε = dε e + dε p ). Seguidamente procede-se ao
descarregamento desse incremento de carga. O trabalho efectuado pelo incremento de
carga vale:
d σ dε = dσ ( dε e + dε p )
(105)
Admita-se agora um processo cíclico de carregamento-descarregamento, partindo-se do
mesmo estado inicial de tensão (σ) e deformação plástica ( ε p ). O trabalho desenvolvido
pelo sistema que actua sobre o sólido neste ciclo de carregamento-descarregamento
depende apenas da parcela plástica do incremento de deformação:
dσ dε p
(106)
Por outro lado, e para os referidos incrementos de tensão e deformação, verifica-se
que o trabalho correspondente à parcela elástica do estado de deformação ( dσ dε e ) é
sempre positivo, enquanto que o trabalho correspondente à parcela plástica do estado de
deformação pode tomar um valor maior ou igual a zero. Desta forma, para o estado de
deformação total resulta que: dσ dε > 0 . Assim, Drucker definiu que um material é
susceptível de encruar com o incremento do estado de deformação plástica se, para um
carregamento incremental o trabalho desenvolvido for positivo e, no processo de
carregamento–descarregamento o trabalho realizado for não negativo. A definição acabada
de descrever é conhecida na literatura como o postulado de Drucker, vindo para um estado
geral de tensão/deformação [24]:
dσ ij dε ij > 0
(107.1)
dσ ij dε ijp ≥ 0
(107.2)
Particularizando para um material com comportamento perfeitamente plástico
verifica-se dσ ij dε ijp = 0 , sendo dσ ij dε ijp ≥ 0 válido para um material com encruamento.
Note-se que o termo referido nesta descrição para incremento de carga deve entender-se
como algo que provoca o incremento de tensão. Todavia, como se pode verificar
facilmente pela observação do gráfico tensão-deformação esta descrição não é válida para
certos materiais, como por exemplo para um material perfeitamente plástico, em que num
estado uniaxial de tracção não é possível qualquer aumento no valor da tensão. Por outras
palavras, para um controle ao nível do estado de tensão estes materiais são instáveis.
Também para os materiais cujo gráfico tensão-deformação revele um amaciamento
do estado de tensão, o pressuposto adoptado por Drucker, ao considerar o incremento de
carga (incremento de tensão) como variável independente, ao qual corresponde uma
resposta em termos de extensão (variável dependente), não é válido. Neste caso, um
determinado estado de tensão conduziria a mais que um estado de deformação possível.
46
Teoria da Plasticidade
Tendo em vista a resolução do problema descrito, isto é, a falha na relação unívoca
tensão-deformação, pode-se imaginar uma relação em que a variável independente seja o
estado de deformação. Segundo Lubliner [24], esse facto, decorrente do trabalho pioneiro
de Ilyushin (1961), representa uma vantagem para a utilização de um critério de cedência
fisicamente baseado em deformações. Para uma análise não linear do material e rotura no
betão, por exemplo, alguns autores desenvolveram critérios de cedência seguindo esta
abordagem [34].
O postulado de Drucker acabado de descrever e em que um incremento de carga
provoca um incremento infinitesimal de tensão, também pode ser estendido para um
incremento de tensão finito. Em particular, para o caso em que o estado de tensão inicial
( σ ij* ) se encontra no interior da superfície de cedência e o estado de tensão final ( σ ij ) está
sobre a superfície de cedência. Admitindo então um incremento de carga que conduza o
estado de tensão de σ ij* para o estado de tensão σ ij e subsequentemente um
descarregamento que conduza novamente o estado de tensão para σ ij* , o postulado de
Drucker implica a seguinte relação:
(σ
ij
− σ ij* ) dε ijp ≥ 0
(108)
7.2. Postulado da Dissipação Plástica Máxima
Admitindo um problema em que apenas se considere um estado de tensão uniaxial, a
expressão (108) pode rescrever-se do seguinte modo:
(σ − σ )
*
dε p ≥ 0
(109)
Esta desigualdade representa a propriedade de que a variação de extensão é positiva
se o valor do estado de tensão final não for inferior ao estado de tensão inicial elástico.
Esta interpretação constitui o postulado da dissipação plástica máxima e que, segundo
Lubliner [24] foi proposto independentemente por von Mises em 1928, por Taylor em
1947 e por Hill em 1948. Utilizando uma abordagem em termos do espaço das
deformações, tem-se um postulado análogo devido a Ilyushin.
A expressão (109) tem importantes consequências na teoria da plasticidade.
Considere-se por exemplo, que a superfície de cedência é diferenciável em todos os seus
pontos, como ocorre na superfície correspondente ao critério de von Mises. Desta forma,
num qualquer ponto pertencente à superfície de cedência é possível definir um plano
tangente à superfície e um vector normal a esse plano. Admitindo uma representação
47
Teoria da Plasticidade
esquemática da superfície de cedência num espaço bidimensional como o representado na
Fig. 34, a relação (109) representa um produto escalar:
(σ − σ )
*
⋅dε p ≥ 0
(110)
dε p
σ -σ *
σ*
σ
Fig. 34-Normalidade do vector incremento de deformação.
Para que o produto interno (110) possa ser válido para um estado de tensão elástico
inicial arbitrário, o vector correspondente ao incremento de deformação plástica dε p , deve
ser normal ao plano tangente à superfície e com o sentido a apontar para fora da superfície.
A descrição acabada de descrever é conhecida como a regra da normalidade [22][24].
No entanto, como se pode verificar na Fig. 35, se o estado de tensão inicial se
encontrar do outro lado do plano tangente a inequação (110) é violada. Deste modo, toda a
região elástica se encontra do mesmo lado do plano tangente, pelo que se pode concluir
que a superfície de cedência é convexa.
σ*
dε p
σ -σ *
σ
Fig. 35-Convexidade da superfície de cedência.
A regra da normalidade, bem como a conclusão acerca da convexidade da superfície
de cedência são consideradas propriedades consequentes do postulado da dissipação
plástica máxima.
48
Teoria da Plasticidade
7.3. Potencial Plástico e Regra de Escoamento
Na teoria do escoamento plástico relaciona-se incrementos infinitesimais de tensão
com incrementos infinitesimais de deformação. O incremento infinitesimal de deformação
total dε é igual à soma dos incrementos infinitesimais correspondentes a uma componente
elástica dε e e a uma componente plástica dε p :
dε = dε e + dε p
(111.a)
dε ij = dε ije + dε ijp
(111.b)
Lévy (1871) e mais tarde von Mises (1913) propuseram que o incremento total de
extensão se relaciona com o respectivo estado de tensão da seguinte forma:
dε = dγ s
(112.a)
dε = dγ sij
(112.b)
em que γ é um coeficiente de proporcionalidade e que pode eventualmente variar ao longo
do processo de deformação plástica. Naturalmente, que a expressão (112) só seria aplicável
em materiais cujo processo de deformação não inclua componente elástica (Hill denominaos de materiais fictícios [18]).
No entanto, admita-se a aplicação de (112) a um material cujo processo deformação
inclua também componente elástica. Para esta situação suponha-se que à componente
elástica do incremento de deformação é aplicável a lei de Hooke e que à restante parte do
incremento de deformação (componente plástica) se aplica a expressão (112). Deste modo,
o incremento infinitesimal de extensão total pode então ser calculado por intermédio da
seguinte expressão:
⎛ 1 ⎛
3ν
⎞⎞
δ ijσ m ⎟ ⎟ + ( dγ sij )
dε ij = ( dε ije ) + ( dε ijp ) = ⎜
⎜ dσ ij 1 +ν
⎠⎠
⎝ 2μ ⎝
(113)
O trabalho de deformação correspondente ao incremento de deformação plástica
vem:
dW p = σ ij dε ijp = σ ij dγ sij = dγ ( sij + δ ijσ m ) sij = dγ sij sij = 2dγ J 2
(114)
em que J2 representa o segundo invariante das tensões de desvio definido em (41.1).
A partir de (114) e considerando a condição de cedência de von Mises obtém-se para
o coeficiente dγ:
49
Teoria da Plasticidade
dW p
3dW p
=
dγ =
2J2
2σ 2
(115)
Substituindo em (113) o valor de dγ calculado em (115) obtém-se a denominada
equação de Prandtl-Reuss [22][24]:
dε ij
p
1 ⎛
3ν
⎞ 3dW
=
δ ijσ m ⎟ +
sij
⎜ dσ ij −
2μ ⎝
1 +ν
2σ
⎠
(116)
De facto, segundo Hill [18], a extensão da expressão de Lévi-Mises (112) para problemas
planos e em que o processo de deformação incluísse no respectivo incremento ambas as
componentes (elástica a plástica) deve-se a Prandtl (1924), tendo posteriormente Reuss
(1930) efectuado a generalização para problemas tridimensionais.
Admitindo que o incremento de deformação elástica é desprezável, quando
comparado com o incremento de deformação total, a partir de (113) pode-se calcular o
incremento de deformação total do seguinte modo:
dε ij = dγ sij
(117)
A expressão (117) permite calcular o incremento de extensão total a partir do tensor
das tensões de desvio e corresponde às equações de Lévi-Mises:
dε xx =
dε yy =
dε zz =
dε
σ
dε
σ
dε
σ
(σ
xx
− 12 (σ yy + σ zz )
)
(118.1)
(σ
yy
− 12 (σ zz + σ xx ) )
(118.2)
(σ
zz
− 12 (σ xx + σ yy )
)
(118.3)
dε xy =
3 dε
τ xy
2 σ
(118.4)
dε xz =
3 dε
τ xz
2 σ
(118.5)
dε yz =
3 dε
τ yz
2 σ
(118.6)
Analisando as equações de Lévy-Mises verifica-se uma analogia com a lei de Hooke
para a elasticidade em que o inverso do módulo de Young (1/E) é substituído pelo
coeficiente dγ e, o coeficiente de poisson é igual a 0,5, assegurando desse modo a
50
Teoria da Plasticidade
condição de incompressibilidade. Pode-se ainda concluir que as equações de Lévy-Mises
são um caso particular das equações de Prandtl-Reuss (116), que por sua vez são um caso
particular da equação de escoamento (113).
A lei do escoamento plástico pode ser obtida por uma outra via, em que se considera
que o incremento de deformação plástica deriva de uma função potencial. Entende-se por
função do potencial plástico Q(σ) a função escalar do tensor das tensões a partir da qual
os incrementos de deformação plástica podem ser determinados por derivação parcial em
ordem às componentes do tensor das tensões [6][18][22][36]:
dε p = dγ
dQ
∂σ
(119.a)
dε ijp = dγ
∂Q
∂σ ij
(119.b)
em que o escalar dγ, é uma constante de proporcionalidade maior que zero, denominado
multiplicador plástico.
Do mesmo modo, como se fez na validação do incremento da tensão de recuperação,
assume-se também aqui uma lei da plasticidade associativa, isto é, a função de cedência
coincide com o potencial plástico, Q ≡ F .
A lei associativa do escoamento plástico também é referida como condição de
normalidade, pois o gradiente ∂F / ∂σ , designado correntemente por vector fluxo, é normal
à superfície de cedência em qualquer ponto do espaço das tensões.
Para os metais, a utilização da lei associativa origina resultados concordantes com
observações experimentais [3][39]. No entanto, pode-se mostrar que a lei associativa do
escoamento plástico e a lei associativa do encruamento cinemático, são equivalentes ao
princípio da máxima dissipação plástica [18][25][26], o que torna a utilização da lei
associativa aceitável do ponto de vista termodinâmico [38]. Na Fig. 36 representa-se
geometricamente a lei associativa e não associativa.
51
Teoria da Plasticidade
σ2
σ2
∂F
∂σ
Q
∂F ∂Q
≡
∂σ ∂σ
∂Q
∂σ
F≡Q
σ1
F
a)
σ1
b)
Fig. 36-Formas de escoamento: (a) associado; (b) não associado.
Note-se que, para outros materiais, como por exemplo, em solos, a aplicação de
regras de escoamento plástico fazendo uso da lei não associativa em simulações numéricas,
conduz a resultados mais realistas [45][50].
No presente texto, a aplicação da lei associativa aos metais, significa que as funções
de cedência de von Mises e de Tresca são também potenciais plásticos.
8. Anisotropia Plástica
Nos itens anteriores admitiu-se que o material apresenta propriedades com carácter
isotrópico, sendo usual efectuar-se a generalização e designar-se o material por isotrópico.
De facto, muitos materiais não apresentam propriedades isotrópicas, mesmo quando
sujeitos a estados de tensão em domínio linear elástico (por exemplo os materiais
compósitos). No entanto, outros materiais, embora apresentando características isotrópicas
em regime elástico, em conjugação com determinadas aplicações envolvendo plasticidade,
ou são fortemente anisotrópicos, ou adquirem anisotropia ao longo do processo de
deformação plástica.
52
Teoria da Plasticidade
Sob uma perspectiva macroscópica, a anisotropia plástica evidencia-se como a
característica do material em apresentar comportamentos diferenciados para distintas
direcções. Recorrendo a título exemplificativo, a processos tecnológicos relacionados com
a conformação em chapa, considere-se a direcção de rolamento (RD) e a direcção
transversal à direcção de rolamento, ou simplesmente direcção transversal (TD), como se
mostra na Fig. 37. As propriedades mecânicas da chapa podem apresentar características
distintas, quando se considera uma, ou outra direcção.
Rolo
RD
TD
1
3
2
Fig. 37-Direcções consideradas na anisotropia.
Em 1948, Hill propôs um critério de cedência aplicável a materiais anisotrópicos
(apresentando simetria ortotrópica) e que se pode considerar como uma generalização do
critério de von Mises [18]. De facto, pode-se entender a superfície de cedência
representativa do critério de Hill como uma distorção da superfície correspondente ao
critério de von Mises. Tomando as direcções de rolamento e transversal como sendo as
direcções principais (ver Fig. 37) e considerando o espaço das tensões principais para a
representação da superfície de cedência, a forma matemática representativa da superfície
de cedência correspondente ao critério de Hill é a seguinte:
F (σ 2 − σ 3 ) + G (σ 1 − σ 3 ) + H (σ 1 − σ 2 )
2
2
2
(120)
em que F,G, e H são constantes do material que caracterizam a anisotropia.
Para um estado uniaxial de tensão, correspondente ao ensaio de tracção, a direcção
da tensão coincide com a direcção principal 1 (sendo o estado de tensão representado por
σ 1 = σ ≠ 0 , σ 2 = σ 3 = 0 ), obtendo-se:
F ( 0 − 0 ) + G (σ − 0 ) + H (σ − 0 ) = ( G + H ) σ 2
2
2
2
(121)
53
Teoria da Plasticidade
Igualando (120) ao segundo membro de (121) obtém-se a tensão equivalente para o critério
de cedência de Hill (em função das tensões principais)
σ2 =
F
G
H
2
2
2
(σ 2 − σ 3 ) +
(σ 1 − σ 3 ) +
(σ 1 − σ 2 )
G+H
G+H
G+H
(122)
De notar, que para um material que apresente as constantes F=G=H=1/2 o critério de
cedência de Hill coincide com o critério de von Mises (como se pode confirmar com (80)).
Como se referiu anteriormente, uma das aplicações do critério de Hill envolve
componentes em chapa, e portanto, peças em que uma das dimensões (no caso da chapa é a
espessura) é muito inferior, quando comparada com as outras duas. Neste tipo de
componentes é usual admitir-se que uma das tensões normais (a normal ao plano tangente
à superfície média da chapa) é desprezável (tome-se σ 3 ≈ 0 ). A tensão equivalente
correspondente ao critério de Hill vem então
σ=
F
G
H
2
σ 22 +
σ 12 +
(σ 1 − σ 2 )
G+H
G+H
G+H
(123)
Fazendo uso da lei associativa, tomando portanto para potencial plástico a própria
função de cedência e utilizando a expressão (119) para a regra de escoamento, obtém-se
para os incrementos de deformação plástica (segundo as três direcções principais):
dε1p = dγ
∂σ
∂σ 1
(124.a)
dε 2p = dγ
∂σ
∂σ 2
(124.b)
dε 3p = dγ
∂σ
∂σ 3
(124.c)
Resultando para uma estrutura tipo casca a partir da derivação de (122) (e não de (123)) e
tomando posteriormente σ 3 ≈ 0
dε1p =
dγ Gσ 1 + H (σ 1 − σ 2 )
σ
G+H
(125.a)
dε 2p =
dγ Fσ 2 + H (σ 2 − σ 1 )
σ
G+H
(125.b)
dγ Gσ 1 + Fσ 2
σ G+H
(125.c)
dε 3p = −
em que σ toma o valor proveniente de (123).
54
Teoria da Plasticidade
Os valores associados às constantes do material F,G, e H terão que ser determinados
experimentalmente. A sua determinação correcta pode ser efectuada pela medição dos
valores da tensão de cedência efectuada em várias direcções e para diferentes estados de
tensão. No entanto, este procedimento raramente é adoptado na prática [47], sendo as
constantes determinadas de forma indirecta, por recorrência à condição de normalidade, e
em que são determinados os cocientes entre extensões obtidas em ensaios de tracção. Para
o efeito são efectuados provetes a partir da própria chapa como se mostra na Fig. 38.
B
β
TD
RD
A
1
2
3
Fig. 38-Orientação dos provetes em chapa para o ensaio de tracção.
Tomando um provete cuja direcção longitudinal coincida com a direcção RD
(provete A na Fig. 38), define-se coeficiente de anisotropia (R) segundo a direcção RD
como sendo:
RRD =
p
dε TD
dε 22p
=
p
dε esp
dε 33p
(126)
Para um provete cuja direcção longitudinal coincida com a direcção TD (provete B),
coeficiente de anisotropia segundo a direcção TD vale:
RTD =
p
dε RD
dε11p
=
p
dε esp
dε 33p
(127)
Para uma direcção arbitrária, definida pelo ângulo β, o coeficiente de anisotropia resultará
do cociente entre a componente do incremento de deformação dε ⊥pβ , ocorrida no plano da
chapa e medida na direcção perpendicular à direcção de tracção, e a componente do
incremento de deformação verificada na direcção da espessura ( dε 33p )
Rβ =
dε ⊥pβ
dε
p
33
(128)
55
Teoria da Plasticidade
Considerando as componentes do incremento de deformação estabelecidas no referencial
definido pelo eixos RD, TD e 3, obtém-se para o coeficiente de anisotropia Rβ
Rβ =
1
2
( dε
p
11
+ dε 22p ) − 12 ( dε11p -dε 22p ) cos ( 2 β ) − dε12p sin ( 2 β )
dε
(129)
p
33
em que dε12p corresponde à componente angular do incremento de deformação cuja relação
com o estado de tensão se encontra definido em (118.4).
A relação entre os coeficientes de anisotropia, RRD e RTD , e as constantes do
material presentes no critério de Hill (F,G e H) pode ser obtida com base no ensaio de
tracção e recorrendo às expressões (125). Para o caso em que o provete é executado de
modo a que seja esticado (por aplicação de uma tensão de tracção σ ) segundo a direcção
RD tem-se: σ 1 = σ , σ 2 = σ 3 = 0
p
F σ 2 + H ( σ 2 − σ1 ) H
dε TD
dε 22p
=
Rβ =0 = R0 = p = p = −
dε 33 dε 33
F σ 2 + Gσ 1
G
(130)
Para o caso em que o provete é executado de modo a que seja esticado segundo a direcção
TD tem-se: σ 2 = σ , σ 1 = σ 3 = 0
Rβ =90 = R90 =
p
dε RD
dε11p
G σ 1 + H σ 1 − Hσ 2 H
=
=−
=
p
p
dε 33 dε 33
Fσ 2 + G σ 1
F
(131)
É ainda usual considerar-se o caso em que o provete é executado de modo a que a
aplicação da tensão de tracção σ se efectue segundo uma direcção a 45º com a direcção de
laminagem Rβ = 45 = R45 .
Em muitos problemas é por vezes conveniente considerar que as características no
plano da chapa são indistintas. É o caso especial da anisotropia normal, em que o termo
“normal” significa perpendicular ao plano da chapa (e portanto com isotropia plana) [48].
Relativamente à função de cedência de Hill, esta hipótese corresponde a tomar o mesmo
valor para o coeficiente de anisotropia, ou seja, R = R0 = R90 = R45 .
No entanto, verificando-se de facto alguma anisotropia no plano, torna-se necessário
obter um valor para R, do tipo valor médio. Se, teoricamente se dispusesse de um número
infinito de coeficientes de anisotropia obtidos num número infinito de ensaios de tracção,
podia-se estimar como valor médio o resultante da seguinte expressão
R=
1 2π
R ( β ) dβ
2π ∫0
(132)
56
Teoria da Plasticidade
o que é impraticável. Como aproximação, utiliza-se o valor resultante da média obtida com
base nos coeficientes R0 , R90 , R45
R=
R0 + 2 R45 + R90
4
(133)
Um segundo parâmetro utilizado para considerar a variação de R com β é o seguinte [47]:
ΔR =
R0 − 2 R45 + R90
2
(134)
No entanto, a função correspondente ao critério quadrático de Hill é frequentemente
utilizada em problemas envolvendo anisotropia normal, pois os procedimentos analíticos
são simplificados. Note-se que neste caso se considera R = R0 = R90 = R45 , pelo que a partir
de (130) e (131) se tem: G=F e H=RF. A substituição destas relações em (123) permite
estabelecer a expressão para a tensão equivalente correspondente ao critério de cedência
quadrático de Hill e com aplicação em componentes de chapa (consultar alguns artigos de
[14])
σ = σ 12 −
2R
σ 1σ 2 + σ 22
1+ R
(135)
9. Modelo Constitutivo Elasto-Plástico
Na definição matemática dos comportamentos elástico e plástico é usual estabelecerse o módulo tangente elasto-plástico, isto é, estabelecer a equação tensorial válida para
uma relação tensão-deformação pós-plastificação.
Admitindo um critério de cedência que possa ser escrito com a deformação plástica
efectiva, ε p , como variável interna do endurecimento isotrópico, ou seja:
F ( σ,ε
p
) = f ( σ ) − σ (ε ) = 0
p
Y
(136)
Diferenciando (136), estabelecem-se os gradientes da função de cedência e do
potencial plástico, resultando:
a=
∂F
;
∂σ
aQ =
∂Q
∂σ
(137.a)
57
Teoria da Plasticidade
aij =
∂F
;
∂σ ij
(a )
Q ij
=
∂Q
∂σ ij
(137.b)
em que a e aQ são designados de vector de cedência e vector de fluxo, respectivamente.
Definindo o valor do escalar aQ , como:
aQ =
2
3
aQ : aQ =
2
3
(a ) (a )
Q ij
(138)
Q ij
e atendendo às expressões (85), (119), (137), e (138), o incremento da variável interna, isto
é, da deformação plástica efectiva, pode ser exprimido como:
dε p = dγ aQ
(139)
Tomando a decomposição da deformação total, como a soma da deformação elástica
e da deformação plástica:
dε = dε e + dε p
(140.a)
dε ij = dε ije + dε ijp
(140.b)
aplicando ainda a lei de Hooke à parte elástica e, substituindo (139) em (140), obtém-se
para o estado de deformação total:
dε = C−41 : dσ + dγ aQ
(141.a)
-1
dε ij = Cijkl
dσ kl + dγ ( aQ )
ij
(141.b)
ou, para o estado de tensão:
dσ = C4 : ( dε − dγ aQ )
(
dσ ij = Cijkl dε kl -dγ ( aQ )
(142.a)
kl
)
(142.b)
No processo de plastificação o estado de tensão permanece sobre a superfície de
cedência, logo F=0. Diferenciando (136) e atendendo a (91) e (137), obtém-se:
dF = a : dσ − H ′dε p = 0
(143.a)
dF = aij dσ ij -H ′d ε p = 0
(143.b)
permitindo relacionar a variação da deformação plástica efectiva com a variação do estado
de tensão:
58
Teoria da Plasticidade
dε p =
1
a : dσ
H′
(144)
dγ aQ =
1
a : dσ
H′
(145)
1
a : C4 : ( dε − dγ aQ )
H′
(146)
Atendendo a (139), vem:
e substituindo (142) em (145), obtém-se:
dγ aQ =
Daqui é possível estabelecer uma expressão para o multiplicador plástico:
1
⎛
⎞ 1
dγ ⎜ aQ +
a : C4 : aQ ⎟ = a : C4 : dε
H′
⎝
⎠ H′
dγ =
a : C 4 : dε
a : C 4 : dε
H′=
H ′aQ + a : C4 : aQ
H ′aQ + a : C4 : aQ
1
H′
dγ =
aij Cijmn dε mn
H ′aQ + aij Cijmn ( aQ )
(147)
(148.a)
(148.b)
mn
Substituindo (148) em (142), estabelece-se uma relação entre o estado de tensão e o
estado de deformação total:
(149)
dσ = Cep
4 : dε
em que:
Cep
4 = C4 -
ep
= Cijkl Cijkl
C4 :aQ ⊗ a : C4
(150.a)
aQ H ′+a:C4 :aQ
Cijmn ( aQ )
mn
aop Copkl
aQ H ′ + aqr Cqrst ( aQ )
(150.b)
st
Este tensor é usualmente conhecido [8][40][41] como módulo tangente contínuo e, pode
ser expresso em função das constantes de Lamé, μ e λ:
59
Teoria da Plasticidade
s
1
Cep
4 = kI ⊗ I +2μ ( I - 3 I ⊗ I ) − 2 μ
⊗
s
s:s
s:s
H ′+K ′
1+
3μ
(151)
em que k, é o módulo de expansão volumétrica:
k = λ + 23 μ
(152)
Note-se, que pode não ser um tensor simétrico, sendo a simetria verificada apenas para a
lei associativa, ou seja, Q≡F ⇒ aQ = a.
Particularizando, para o critério de von Mises, tem-se aQ =1 [30], sendo para o
critério de Tresca aQ =
2
3
, enquanto que para os critérios de Mohr-Coulomb e Drucker-
Prager, aQ não é constante, dependendo do estado de tensão na superfície de cedência.
Se se admitir um encruamento energético, em vez do encruamento por deformação
atrás descrito tem-se, com base em (87):
dα = dW p = σ : dε p
(153)
ou, recorrendo à condição de ortogonalidade:
dα = dγ σ : a
(154)
resultando então:
H ′aQ =
dσ Y
σ :a
dα
(155)
Recorrendo ao ensaio de tracção uniaxial, sabe-se que:
dα = σ Y dε
p
(156)
e atendendo ao teorema de Euler [35],
σ : a =σ Y
(157)
resulta, para o encruamento energético:
dσ Y dσ Y dε p dσ 1 H ′
=
=
=
dα dε p dα dε p σ Y σ Y
(158)
Substituindo (157) e (158) em (155), resulta finalmente para o encruamento energético:
60
Teoria da Plasticidade
H ′aQ = H ′
⇒ aQ = 1
(159)
Conforme foi notado por Nayak e Zienkiewicz [30], a análise de (159) permite
concluir que o encruamento por deformação só coincide com o encruamento energético,
para os materiais que obedecem ao critério de cedência de von Mises, relativamente aos
quais se verifica aQ =1 .
Se se pretender incluir o encruamento cinemático no modelo, é necessário incluir a
tensão de recuperação definida em (94). Neste caso, todas as funções ( F , Q, a, aQ ) são
expressas em função de σ k , em vez de σ . No módulo tangente substitui-se aQ H ′ por
aQ ( H ′+cK ′ ) , em que K ′ é o módulo de encruamento cinemático, e
c = 23 a:aQ = 23 aij ( aQ )
(160)
ij
sendo igualmente c =1 , para o critério de cedência de von Mises.
Teoria da Plasticidade
61
10. Referências
[1]
Auricchio, F. & Taylor, R.L., (1995), Two material models for cyclic plasticity:
nonlinear kinematics hardening and generalized plasticity, Int. J. of Plasticity.,
Vol.11, pp.65-98.
[2]
Axelsson, K. & Samuelsson, A., (1979), Finite element analysis of elastic-plastic
materials displaying mixed hardening, Int. J. Num. Meth. Eng., Vol.14, pp.211-225.
[3]
Bate, M., (1992), Isotropic plasticity, in Numerical Modelling of Material
Deformation Processes, Hartley, P., Pillinger, I. & Sturgess, C. (eds.), SpringerVerlag, London, pp.68-83.
[4]
Beltrami, E. (1885), Sulle condizioni de resistenze di corpi elastici, Rend. 1st
Lomb., Vol.18, pp.704.
[5]
Bridgeman, P.W., (1952), Studies in Large Plastic Flow and Fracture, McGrawHill, New York.
[6]
Chakrabarty, J., (1987), Theory of Plasticity, McGraw-Hill, Singapore.
[7]
Chung, T.J., (1988), Continuum Mechanics, Prentice-Hall International Ed.
[8]
Crisfield, M.A., (1994), Non-linear Finite Element Analysis of Solids and
Structures; Vol.1, John Wiley & Sons, Chichester, U.K.
[9]
Dieter, G.E., (1976), Mechanical Metallurgy, 2nd ed., McGraw-Hill, Tokyo.
[10]
Drucker, D.C. & Prager, W., (1952), Soil mechanics and plastic analysis or limit
design, Q. J. Appl. Math., Vol.10, pp.157-165.
[11]
Ekmark, B., (1983), On Large Strain Theories in Sheet Metal Forming, PhD.
Thesis, Luleå University, Sweden.
[12]
Fjaer, H.G. & Mo, A., (1990), ALSPEN-A mathematical model for thermal stresses
in direct chill casting of aluminium billets, Metallurgical Transactions B, Vol.21B,
pp.1049-1060.
[13]
Fung, Y.C., (1965), Foundations of Solid Mechanics, Prentice-Hall, New Jersey,
U.S.A.
[14]
Gelin, J.C., Picart, P., (Eds) (1999), Numisheet’99 - Numerical Simulation of 3D
Sheet Forming Processes, Proceedings of the 4th International Conference and
Workshop on Numerical Simulation of 3D Shett Forming Processes, University of
Franche-Comté and ENSMM Besançon, France.
[15]
Ghali, A. & Neville A.M., (1989), Structural Analysis. A Unified Classical and
Matrix Approach, Third ed., Chapman and Hall, New York, U.S.A.
Teoria da Plasticidade
62
[16]
Green, R.J., (1972), A plasticity theory for porous solids, Int. J. Mech. Sci., Vol.14,
pp.215-224.
[17]
Hensel, A. & Spittel, T., (1978), Kraft und Arbeitsbedarf bildsamer
Formgebungsverfahren, VEB Deutscher Verlar für Grundstoffindustrie, Leipzig.
[18]
Hill, R., (1950), The Mathematical Theory of Plasticity, Oxford University Press.
[19]
Hodge, P.G., (1959), Plastic Analysis of Structures, McGraw-Hill.
[20]
Johnson, W. & Mellor P.B., (1962), Plasticity for Mechanical Engineers, Van
Nostrand Reinhold Company, London.
[21]
Johnson, W. & Mellor P.B., (1973), Engineering Plasticity, Van Nostrand Reinhold
Company, London.
[22]
Kachanov, L.M., (1974), Fundamentals of the Theory of Plasticity, MIR
Publishers, Moscow.
[23]
Krengl, R., (1984), Anpassung von Warmvalz-Stichplänen an Veranderung der
Walzguttemperatur, Institut für Werkstoffumformung, TU Clausthal.
[24]
Lubliner, J., (1990), Plasticity Theory, Macmillan Publishing Company, New York.
[25]
Lubliner, J., (1984), A maximum-Dissipation Principle Generalized Plasticity, Acta
Mechanica, Vol.52, pp.225-237.
[26]
Lubliner, J., (1986), Normality Rules in Large-Deformation Plasticity, Mechanics
of Materials, Vol.5, pp.29-34.
[27]
Matthies, H., (1989), The rate problem for complex material behaviour with
internal variables, Computational Plasticity: Models, Software and Applications,
Part 1, Pineridge, Swansea, pp.27-48.
[28]
Mendelson, A., (1968), Plasticity: Theory and Application, McMillan, New York.
[29]
Nadai, A., (1950), The Theory of Flow and Fracture of Solids, McGraw-Hill, New
York.
[30]
Nayak, G.C. & Zienkiewicz, O.C., (1972), Elasto-plastic stress analysis.
Generalization for various constitutive relations including strain softening, Int. J.
Num. Meth. Eng., Vol.5, pp.113-135.
[31]
Nemat-Nasser, S., (1979), Decomposition of strain measures and their rates in finite
deformation elastoplasticity, Int. J. Solids Struct., Vol.15, pp.155-166.
[32]
Nemat-Nasser, S., (1982), On finite deformation elasto-plasticity, Int. J. Solids
Struct., Vol.18, pp.857-872.
[33]
Odquist, F.K.G., (1933), Math. Mech., Vol.13, pp.360.
Teoria da Plasticidade
63
[34]
Oñate, E., (1992), Lectures on Nonlinear Finite Element Analysis of Concrete
Shells, Monografia CIMNE (centro Internacional de Metodos Numericos en
Ingenieria), Barcelona, Espanha.
[35]
Owen, D.R.J. & Hinton, E., (1980), Finite Elements in Plasticity: Theory and
Practice, Pineridge Press, Swansea, U.K.
[36]
Prager, W., (1959), An Introduction to Plasticity, Addison-Wesley.
[37]
Rodic, T., (1989), Numerical Analysis of Thermomechanical Process During
Deformations of Metals at High Temperatures, PhD. Thesis, University College of
Swansea, Wales, U.K.
[38]
Schönauer, M., (1993), Unified numerical analysis of cold and hot metal forming
processes, PhD. Thesis, University College of Swansea, Wales, U.K.
[39]
Siegfried, S.H., (1976), Experimental studies of yield phenomena in biaxial loaded
metals, in Constitutive equations in viscoplasticity: Computational and
Engineering Aspects, Stricklin, J.A. & Saczalski, K.J. (eds.), ASME, New York,
pp.1-33.
[40]
Simo, J.C. & Taylor, R.L., (1985), Consistent tangent operators for rateindependent elastoplasticity, Comp. Meth. Appl. Mech. Eng., Vol.48, pp.101-118.
[41]
Simo, J.C., (1988), A framework for finite strain elastoplasticity based on
maximum plastic dissipation and multiplicative decomposition. Part II:
Computational aspects, Comp. Meth. Appl. Mech. Eng., Vol.68, pp.1-31.
[42]
Thomas, T.J., Nair, S. & Garg, V.K., (1983), A numerical study of plasticity
models and finite elements types, Comp. & Struct., Vol.16, pp.669-675.
[43]
Timoshenko, S.P., (1978), Resistência dos Materiais; Vol2, Livros Técnicos e
Científicos Editora S.A., Rio de Janeiro, Brasil (tradução Brasileira).
[44]
Tresca, H. (1864), The non-linear field theories of mechanics, Handbuch der
Physic, Vol.III/3, Springer-Verlag, Berlin.
[45]
Vermeer, P.A. & de Borst, R., (1984), Non-associated plasticity for soils, concrete
and rock, Heron, 29, 3.
[46]
von Mises, R. (1913), Mechanic der Festen Körper in Plastisch Deformablem
Zustand, Göttinger Nachr. Math. Phys. Kl., pp.582.
[47]
Wagoner, R.H., Chenot, J.-L., (1996), Fundamentals of Metal Forming, John Wiley
& Sons.
[48]
Wagoner, R.H., Chenot, J.-L., (2001), Metal Forming Analysis, Cambridge
University press.
[49]
Ziegler, H., (1983), An Introduction to Thermodynamics, North-Holland,
Amsterdam.
Teoria da Plasticidade
64
[50]
Zienkiewicz, O.C., Humpheson, C. & Lewis, R.W., (1975), Associated and nonassociated visco-plasticity and plasticity in soil mechanics, Géotechnique, Vol.4,
pp.671-689.
[51]
Zienkiewicz, O.C., Valliappan, S. & King, I.P., (1969), Elasto-plastic solutions of
engineering problems ´initial stress`, finite element approach, Int. J. Num. Meth.
Eng., Vol.1, pp.75-100.
65
Teoria da Plasticidade
⎛ ∂f ⎞
df = ⎜ ⎟ dσ + L σ - symbol bold (vector)
⎝ ∂σ ⎠
T
F ( σ, α ) = f ( σ ) − σ Y (α ) = 0
σ times new roman do mahtype (tensor)
σ, σ tensão normal genérica simbolo (da janela de simbolos, ou do mahtype σ, σ )