Aula 04 – Diagrama de lugar geométrico das raízes
SCS – Sistemas de Controle / Servomecanismos
Aula 04 – Diagrama do lugar geométrico das raízes
Definição: O lugar das raízes de um sistema é um gráfico que representa a trajetória das raízes de sua
equação característica – pólos da função de transferência em malha fechada – obtida a partir da variação
de um parâmetro deste sistema.
Para um sistema dinâmico de ordem n, quando o parâmetro de interesse é variado de forma contínua, o
lugar das raízes é constituído de uma família de n ramos (ou caminhos) traçados a partir das n raízes da
equação característica.
Nas discussões acerca do lugar das raízes, é comum usar como base um sistema como o da figura abaixo,
com 0 K .
R s
+
-
G s
K
Y s
Na figura ao lado, assume-se que G s
inclui as funções de transferência do
H s
controlador – Gc s – e da planta,
Gp s .
Sistema para análise do lugar das raízes
Atualmente, aplicativos computacionais como o MATLAB e o LabView calculam o lugar das raízes de um
sistema de forma rápida e eficiente. Entretanto, um bom conhecimento das regras e técnicas de construção
do lugar das raízes proporciona uma compreensão aguçada dos efeitos causados pelas mudanças de
parâmetros e da adição de pólos e zeros ao sistema.
Regras para a construção do diagrama de Lugar das Raízes: A teoria referente às técnicas de construção é
muito mais extensa do que a apresentada neste material, porém, acredito que este material, juntamente
com os exercícios realizados na sala de aula, será suficiente para compreensão destas técnicas.
Para a construção do diagrama de Lugar das Raízes faz-se necessário seguir cinco regras bem definidas e de
fácil entendimento, a tabela abaixo reúne estas regras aplicadas a um sistema descrito pela equação
característica 1 K G s H s 0 .
Tabela: Regras para construção do diagrama do lugar das raízes
Regra 1. O diagrama do lugar das raízes é simétrico em relação ao eixo real.
Regra 2. O diagrama do lugar das raízes se origina nos pólos de G s H s – para K 0 – e termina nos
zeros de G s H s , incluindo os que ocorrem no infinito, quando K .
Regra 3. Se a função de malha aberta possui zeros no infinito, 1 , o diagrama do lugar das raízes se
aproxima de assíntotas à medida que K tende ao infinito. Os ângulos destas assíntotas são dados por
r 180
com r 1 , 3 , 5 ,
1
SCS – Sistemas de Controle / Servomecanismos
Aula 04 – Diagrama de lugar geométrico das raízes
e o intercepto das assíntotas no eixo real ocorre no ponto
a
soma dos pólos finit os soma dos zeros fin it os
número de pólos finit os número de zeros finit os
Regra 4. O lugar das raízes inclui todos os pontos do eixo real à esquerda de um número ímpar de
freqüências críticas reais.
Regra 5. Os pontos de quebra ou ruptura do diagrama do lugar das raízes serão obtidos a partir do
conjunto das raízes do polinômio gerado por
d G s H s
ds
0 ou, de forma equivalente, N s D s N s D s 0
em que N s e D s são, respectivamente, os polinômios do numerador e do denominador de
G s H s .
O traçado do lugar das raízes de um sistema em malha fechada, em função de um ganho de ramo direto,
pode ser obtido diretamente no MATLAB pela função rlocus. A partir da função de transferência em malha
aberta,
G s
n s
d s
obtém-se o lugar das raízes do sistema em malha fechada, usando
rlocus(n,d);
ou
rlocus(G);
% Sendo G = tf(n,d)
Neste caso, o MATLAB utiliza um vetor de ganhos criado automaticamente, com kp variando de 0 a +. Este
vetor também pode ser fornecido pelo usuário, como no exemplo a seguir:
VG = [0:0.5:20];
rlocus(n,d,VG);
% Cria vetor com ganhos de 0 a 20
% Obtém o lugar das raízes
O resultado é apresentado em uma janela de figura com os pólos e zeros de malha aberta indicados por ""
e "", respectivamente. A função rlocus também pode fornecer as raízes calculadas e o vetor de ganhos
utilizado nos cálculos, sem traçar o gráfico, usando-se:
[R Kp] = rlocus(n,d)
% R = matriz de raízes; Kp = vetor de ganhos
Analisando-se estes valores de retorno é possível descobrir, por exemplo, quais valores de kp podem tornar
o sistema instável.
2
SCS – Sistemas de Controle / Servomecanismos
Aula 04 – Diagrama de lugar geométrico das raízes
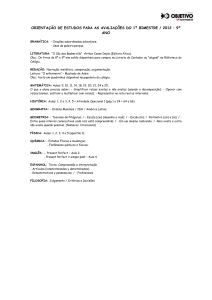
Exemplo 1 – Utilizando o comando rlocus: Considere um sistema como o da figura 5.1, com:
G s
1
s 4s 6s 1
3
2
.
O lugar das raízes deste sistema pode ser obtido, digitando-se:
>> MA = tf(1,[1 4 6 1]);
>> rlocus(MA);
O resultado gráfico está representado na figura abaixo. As setas indicam o sentido de deslocamento dos
pólos de malha fechada do sistema com o aumento de kp.
Pólo de malha aberta
Lugar das raízes
Análise gráfica do lugar das raízes: A análise dos pólos do sistema em relação ao ganho kp também pode
ser feita de forma gráfica pelo uso da função rlocfind. Esta função calcula o ganho de ramo direto
necessário para que um certo pólo, selecionado pelo mouse na janela do lugar das raízes, seja obtido.
Para ver um exemplo de como isto pode ser feito, obtenha o lugar das raízes do sistema desejado e digite:
>> [g p] = rlocfind(MA)
3
SCS – Sistemas de Controle / Servomecanismos
Aula 04 – Diagrama de lugar geométrico das raízes
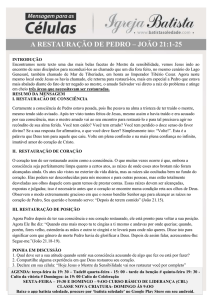
A mensagem "Select a point in the graphics window" será mostrada na janela de comando do MATLAB e
um cursor e forma de cruz aparecerá na janela de figura, aguardando que um ponto seja selecionado. No
exemplo a seguir foi considerado o lugar das raízes do sistema descrito como exemplo anterior.
Figura 5.3: Seleção de um ponto sobre o lugar das raízes
Os resultados correspondentes são exibidos na janela de comando assim que um ponto for selecionado.
Para o exemplo da figura 5.3, tem-se:
selected_point = -0.6836 + 1.3540i
g = 5.1271
p = -2.5984
-0.7008 + 1.3664i
-0.7008 - 1.3664i
Os pólos calculados no vetor p ficam destacados na janela de figura até que o gráfico seja redesenhado.
Importante: a função rlocfind só funciona se existir uma janela de lugar das raízes criada pelo comando
rlocus.
Exercícios:
1) Determine o ganho crítico (limite da estabilidade) para um sistema com:
G s
s2 s 2
.
s s 2 2 s 3
Na condição crítica, quais pólos são dominantes?
4
SCS – Sistemas de Controle / Servomecanismos
Aula 04 – Diagrama de lugar geométrico das raízes
2) Considere um sistema realimentado definido por:
G s
1
.
s s 2 s 2 4 s 5
Verifique se é possível obter pólos dominantes com parte real igual a -0,35 e determine para qual valor de
kp isto acontece.
3) Considere um sistema definido pela função de transferência:
G s
s 1 .
s 2 s 9
Determine o valor do ganho kp para o qual os três pólos de malha fechada são reais e iguais.
4) Determine o ganho crítico (limite da estabilidade) para um sistema com:
G s
s2 s 2
.
s s 2 2 s 3
Confira o valor obtido, simulando a resposta ao degrau do sistema. Na condição crítica, quais pólos são
dominantes?
5) Considere um sistema definido pela função de transferência:
G s
s 1 .
s 2 s 9
Determine o valor do ganho Kp para o qual os três pólos de malha fechada são reais e iguais.
6) Considere o sistema mostrado a seguir, no qual GC s representa um controlador.
R(s)
K s 2 ,5
s
1
G s
0 ,5 s 1 0 ,125 s 1
G C s
C(s)
+
-
GC(s)
G(s)
Pode-se mostrar que o sistema possui tempo de acomodação menor que 2 s e erro estacionário nulo para
entrada em degrau se os pólos complexos (supostamente) dominantes em malha fechada estiverem à
esquerda de uma linha vertical traçada em s = −2,5. Determine o ganho mínimo que permite obter esta
especificação de desempenho e verifique se os pólos complexos são realmente dominantes (critério: parte
real 10 vezes menor do que a dos demais pólos).
5
SCS – Sistemas de Controle / Servomecanismos
Aula 04 – Diagrama de lugar geométrico das raízes
Configurações típicas: O esboço de diagramas do lugar das raízes depende fortemente da experiência.
Desta forma, é útil o conhecimento prévio de algumas configurações típicas desses diagramas. A Tabela
abaixo fornece configurações para sistemas de ordem reduzida.
Os diagramas (f) e (g) ilustram alguns dos problemas que ocorrem na construção do lugar das raízes. Nestes
casos, os sistemas em estudo possuem um pólo real e dois complexos conjugados. Entretanto, deve-se
notar a posição relativa entre os pólos complexos e o pólo real.
Para funções de malha aberta como as representadas nos diagramas (f) e (g), o cálculo dos pontos de
quebra indica qual dos esboços deve ser aplicado – deve-se notar que (f) possui dois desses pontos à
esquerda de p1 enquanto (g) não possui nenhum.
Configurações típicas de diagramas do lugar das raízes
6
SCS – Sistemas de Controle / Servomecanismos