Gil da Costa Marques
12.1 Introdução
12.2 Força Muscular e Velocidade Impressa
12.3 Velocidade no andar e no correr
12.4 O caminhar do Homem e dos Animais
12.5 Velocidade dos Animais
12.6 O Voo das Aves
12.7 Força de arraste
12.8 Força no Regime Turbulento
12.9 Movimento de Planeio
12.10 Movimento de Paraquedismo
12.11 Movimento de Paraquedismo no Regime Laminar
12.12 Movimento de paraquedismo no Regime Turbulento
12.13 Forças resultantes de diferenças de pressão
12.14 Forças de Sustentação
12.15 Força de impulsão: voo com propulsão
Licenciatura em Ciências · USP/ Univesp
Dinâmica do Movimento dos Corpos
12
MOVIMENTO DOS ANIMAIS
Licenciatura em Ciências · USP/Univesp · Módulo 1
281
12.1 Introdução
Quando analisado à luz das leis de Newton, os movimentos dos animais são extremamente
complexos. E isso ocorre por duas razões: Em primeiro lugar, porque são muitas as forças
musculares agindo, especialmente quando em movimento acelerado. O segundo complicador tem relação com o fato de que o formato do animal muda
continuamente com o tempo. Às vezes, ele está mais
recolhido (entre as passadas), às vezes mais alongado.
Figura 12.1: Quando em movimento, os animais
Em linguagem científica, dizemos que um animal em adquirem diferentes conformações.
movimento não se comporta como um corpo rígido.
Nesta aula estudaremos, à luz da dinâmica Newtoniana, apenas o movimento de paraquedismo. Nesse caso, analisaremos o efeito da força de arraste e do peso da ave.
Os demais movimentos (planeio, com propulsão e flutuação no ar) serão analisados com
base em argumentos simples, isto é, levando em conta aspectos gerais de alguns tipos de força
(como arraste e sustentação), mas sem nos preocuparmos com expressões analíticas para elas.
Exploraremos também alguns modelos simples para descrever movimentos tanto o de andar
quanto o de correr.
12.2 Força Muscular e Velocidade Impressa
As molas motoras dos movimentos dos animais são os músculos, isto é, mediante o acionamento de algumas células excitáveis, que compõem os músculos, o animal adquire a habilidade
de se locomover.
Os músculos esqueléticos (no corpo humano existem outros dois tipos: lisos e cardíacos)
são responsáveis pelo movimento do animal todo. Eles são constituídos de milhares de células
especializadas denominadas fibras musculares. Tipicamente, as dimensões das fibras são: 20 cm
de comprimento e 50 μm de diâmetro da base.
Dinâmica do Movimento dos Corpos
282
Licenciatura em Ciências · USP/Univesp · Módulo 1
Figura 12.2: Quando estimuladas, as fibras musculares se contraem.
As fibras musculares são células excitáveis eletricamente. Quando estimuladas, elas se contraem.
Ao se contraírem, como no caso de uma mola comprimida, um músculo exerce uma força.
12 Movimento dos Animais
Licenciatura em Ciências · USP/Univesp · Módulo 1
283
A força máxima (Fm) pode ser inferida a partir do dado, experimental, de que um músculo é
caracterizado por uma tensão máxima dada por:
Fm
F
≅ 7 × 106 dina/cm 2 ou m ≅ 70 N/cm2
A
A
12.1
onde Fm , na expressão 12.1, é a força muscular.
Exemplos
• Exemplo 1:
A Figura 12.3 esquematiza um exercício pliométrico, que envolve ciclos de rápida distensão seguida
de rápido encurtamento muscular. Se durante o exercício um músculo exercer uma força de 700 N,
qual a sua seção transversal?
Figura 12.3: Ação muscular concêntrica.
→ Resolução:
De acordo com a expressão 12.1, a área do músculo
=
será: A
Fm
700 N
=
= 10 cm 2.
70 N/cm 2 70 N/cm 2
Os músculos esqueléticos terminam, nos dois extremos, nos tendões.
Eles ligam os músculos aos ossos. Alguns músculos terminam em
dois (os bíceps) ou três tendões (os tríceps). Os músculos são assim
ligados a diferentes ossos.
O tendão tem o papel de transmitir a força muscular aos ossos.
Como já percebera Leonardo da Vinci, “a função do músculo é
Figura 12.4: Tendões ligando os
puxar, nunca empurrar”.
músculos aos ossos.
O significado da expressão 12.1 é o de que a força muscular é variável. Depende, até certo limite,
da força solicitadora. Na medida da necessidade, mais e mais fibras são acionadas, ou seja, encurtadas.
Para efeito de considerações energéticas durante o movimento, devemos analisar o trabalho
realizado pela força muscular.
Dinâmica do Movimento dos Corpos
284
Licenciatura em Ciências · USP/Univesp · Módulo 1
Se o músculo se contrair por uma distância d, o trabalho realizado pela força muscular Fm é dado por
τ = Fm d
12.2
Tendo em vista que o trabalho é igual à variação da energia cinética, e admitindo-se que a
velocidade inicial da pata de um animal seja nula e que ela tenha massa mP, então, a contração
do músculo por uma distância d propiciará à pata do animal uma velocidade Vp, dada por:
mp
2
V p 2 = Fm d
⇒
Vp =
2 Fm d
mp
12.3
Assim, a velocidade impressa à pata depende da distância contraída pelo músculo, da força
muscular e da massa da pata do animal.
• Exemplo 2
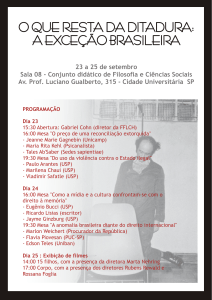
A Figura 12.5 ilustra a força FB = FB j exercida pelo
bíceps contraído no ponto B do antebraço. Um sistema
de referência xyz foi desenhado de modo que o eixo
0z “saia” do plano do papel. O peso do antebraço tem
intensidade 20 N e é localizado no centro de gravidade
CGanteb; a bola, com centro de gravidade CGbola tem peso
de intensidade 50 N.
Sendo x1 = 4,5 cm; x2 = 15
cm e x3 = 30 cm,calcule FB
e a reação na articulação F0.
Figura 12.5: Esquema da força do bíceps
sobre o antebraço.
→ Resolução:
Esta situação não trata de forças concentradas
numa partícula. Trata-se de um sistema de forças
distribuídas ao longo de um corpo extenso.
Esse corpo extenso é o antebraço que, para
simplificar a análise, iremos considerar como
uma alavanca com ponto de apoio em 0 (articulação) e, nela, esquematizar as forças (ou seja,
esquematizar o DCL da alavanca).
Os vetores x1 = 4,5 i ; x2 = 15 i e x3 = 30 i (em
cm) representam os vetores posição dos pontos Figura 12.6: Modelo da alavanca para o antebraço.
de aplicação de cada força na alavanca em relação
à origem 0 (articulação do antebraço, no nosso caso).
O caso em análise é uma situação estática, ou seja, uma situação na qual a aceleração resultante do
sistema é a = 0. Portanto, de acordo com a 2ª Lei de Newton, podemos escrever:
∑
4
1
12 Movimento dos Animais
Fi = m.a = 0 ou R0 + FB j + ( −20 j ) + ( −50 j ) = 0
(I)
Licenciatura em Ciências · USP/Univesp · Módulo 1
285
Temos duas incógnitas (R0 e FB). Precisamos de outra relação entre as incógnitas. Essa relação
será obtida mediante uma função importantíssima das forças que os músculos exercem sobre
os ossos: trata-se da rotação que as forças podem produzir nos ossos ao redor das articulações.
Esse poder de rotação é denominado Torque ou Momento da força em relação à articulação.
Definição de torque
O torque é um vetor que resulta do produto vetorial
do vetor posição r pela força F, ou seja, τ = r × F.
O módulo do torque é τ = r.F.sen θ, onde r.sen θ = b = braço de alavanca da força em relação à
articulação.
Figura 12.7: Detalhe do “braço” da
força em relação ao eixo de rotação.
O torque será nulo
se o braço da força b = 0, ou seja, se θ = 0°. Para
θ = 90° (r ⊥ F ) → sen90° = 1 e τ = F.b (intensidade máxima do
torque). Portanto, o torque de uma força é tal que 0 ≤ τ ≤ F.b.
O sentido do vetor torque pode ser determinado, na prática, pela
regra da mão direita, conforme ilustra a Figura 12.8.
No caso de forças cujas direções (linhas de ação) pertencem a um
mesmo plano, os torques dessas forças serão vetores perpendiculares ao
plano. Em relação a um eixo de rotação perpendicular ao plano,
alguns torques serão no sentido horário e outros no sentido anti-horário. Se a soma dos torques no sentido horário suplantar a soma
dos torques no sentido anti-horário, o objeto sujeito às forças será
dotado de uma aceleração angular no sentido horário e vice-versa.No
caso analisado, no entanto, o objeto está em equilíbrio e destituído do
movimento de rotação.
Em resumo: Para que uma alavanca não se desloque e não
experimente movimentos de rotação, devem ser satisfeitas as
seguintes condições:
∑ Fi = 0
i
∑τ
i
i
=0
Figura 12.8: Regra da mão direita para
definir o sentido do vetor torque. Mantendo
a mesma
orientação relativa desenha-se
r e F num mesmo plano e aplicados
num mesmo ponto; os dedos da mão
direita
girar (sempre) no sentido
devem
de r para F . O polegar indica o sentido do
vetor torque τ. Sendo o giro no sentido
“anti-horário” (como na figura), o torque é
para cima. O torque será oposto se o giro
for no sentido horário.
Figura 12.9: Alavanca estática.
Dinâmica do Movimento dos Corpos
286
Licenciatura em Ciências · USP/Univesp · Módulo 1
Calculando os torques
Os produtos
vetoriais
(ver
tema
Vetores) dos vetores cartesianos ( i × i ) = ( j × j ) = k × k = 0 e
(i × j ) = k ; j × k = i ; k × i = j serão utilizadosnos cálculos dos torques.
m)
• τ FB = x1 × FB = ( 4, 5) i × ( FB ) j = ( 4, 5)( FB ) ( i × j ) = ( 4, 5) FB k ( N.cm
• τ P1 = x2 × P1 = (15) i × ( −20 ) j = ( −300 ) ( i × j ) = ( −300 ) k ( N.cm )
• τ P3 = x3 × P3 = ( 30 ) i × ( −50 ) j = ( −1500 ) ( i × j ) = ( −1500 ) k ( N.cm )
• τ R0 = 0 (pois o respectivo vetor posição xR0 = 0)
Como o sistema se encontra estático → ∑ τs / alavanca = ( 4, 5FB − 300 − 1500 ) k = 0 .
( II )
(
)
(
(
)
)
1800 N.cm
=
FB = 400 N (vertical para cima) que, substituído em I, determiDe II determinamos
4, 5 cm
namos R0 = −330 j ou R0 = 330 N (vertical para baixo).
12.3 Velocidade no andar e no correr
No caso de um animal que se move a velocidade constante, o movimento pode ser visto
como uma repetição de movimentos. É nesse sentido que ele será encarado como um movimento periódico.
O período T, nesse caso, é o intervalo de tempo necessário para que ele se repita; por exemplo,
quando o animal volta a colocar as mesmas patas, de novo, no chão. O intervalo de meio
período define o tempo por ele despendido para dar uma passada.
Tanto no caso do caminhar quanto no do correr, a velocidade de um animal pode ser
expressa em termos da passada (P), a distância entre dois pontos nos quais o animal coloca uma
das patas,e o período do movimento:
v = 2⋅
P
T
12.4
2
O número de passos por segundo é o inverso da metade do período . Assim, a velociT
dade do caminhar dito natural é dada pela expressão 12.4.
12 Movimento dos Animais
Licenciatura em Ciências · USP/Univesp · Módulo 1
287
• Exemplo 3
Usain Bolt, em 2009, em Berlin, venceu a corrida de 100 m rasos em 9,58 s, estabelecendo um novo
recorde. Analisando o vídeo do evento, constatou-se que Bolt precisou de 41 passos para completar
os 100 m.
a. Qual foi a velocidade média de Bolt?
b. Supondo uniforme o movimento de Bolt, qual o período e a frequência das passadas?
→ Resolução 1:
100 m
≅ 10, 44 m/s.
a. Velocidade média = v =
9, 58 s
b. A Figura 12.10 ilustra passadas de um atleta; em A, o pé direito toca na pista e, em B, é o pé
esquerdo. A distância AB = passo = P. Sendo uniforme a sucessão das passadas, podemos analisar
o movimento como um “movimento periódico”. Portanto, desse modo, definem-se um período
e uma frequência do movimento periódico.
Cálculo do período T
Figura 12.10: O período é o tempo de
duas passadas sucessivas, ou seja, o
intervalo de tempo que decorre desde
o toque do pé direito em A e o toque
do mesmo pé em C.
Qual o tempo de uma passada? Os 100 m são vencidos por 41 passadas em 9,58 s. A razão
9, 58 s
= 0.2334 s/passada; portanto, ∆t1 passada = 0,2334 s.
41 passadas
Como o período T corresponde ao intervalo de tempo de duas passadas sucessivas, tem-se:
T = 2 × ( 0, 2334 s ) ≅ 0, 47 s
Dinâmica do Movimento dos Corpos
288
Licenciatura em Ciências · USP/Univesp · Módulo 1
Cálculo da frequência f das passadas
A frequência é o número de “2 passadas sucessivas” que Bolt realiza em cada intervalo de 1 s. Como
Bolt completa 41 passadas na corrida, o número de “2 passadas sucessivas” = 41/2. Logo, a frequência
41 2 passadas
≅ 2,14 passadas/segundo. Como “passada” não é uma grandeza
9, 58 s
física, podemos escrever que f = 2,14/s = 2,14 Hz (hertz).
das passadas será f =
→ Resolução 2:
P
2P
podemos determinar o período T =
. A velocidade foi determiT
v
100 m
nada no item (a); precisamos calcular o tamanho P da passada, ou seja,
=
P = 2, 44 m. Assim,
41
2 × ( 2, 44 ) m
T=
≅ 0, 467 s. A frequência f = 1/T = 2,14 Hz.
10, 438 m/s
Por meio da expressão v = 2 ⋅
12.4 O caminhar do Homem e dos Animais
Tendo em vista que as pernas dos animais executam um movimento periódico e que elas
executam um movimento pendular durante as passadas,é muito comum analisar o caminhar
dos animais tomando como base um movimento pendular, ou seja,um MHS. É, assim, uma
descrição baseada num modelo simples.
Analisaremos o caminhar dos homens e dos animais
considerando um modelo no qual as pernas executam
um movimento pendular,onde o pêndulo físico, que
executa um movimento oscilatório, será encarado
como se fosse a perna do animal. E ela será pensada
como uma barra delgada. Este é outro aspecto do
modelo empregado.
Figura 12.11: A perna funciona como um pêndulo.
Como sabemos, no movimento harmônico simples, a velocidade máxima, Vmax, atingida
pelo móvel é dada por:
Vmax = ωA =
12 Movimento dos Animais
2π
A
T
12.5
Licenciatura em Ciências · USP/Univesp · Módulo 1
289
A velocidade quadrática média, por outro lado, é dada por:
V =
ωA Vmax
=
2
2
12.6
A aceleração máxima amax é dada por:
2
2π
amax = ω2 A = A
T
12.7
onde A é a amplitude do movimento e T é o período.
A amplitude será, no caso do homem, a metade do valor de uma passada associada a uma
das pernas.
O modelo pendular permite-nos concluir, portanto, que a velocidade quadrática será dada,
em função do período do movimento e do comprimento da passada, por
V =
2π
π P
P
A=
= 2, 2
T
2T
2T
12.8
Esse resultado é, basicamente, o mesmo previsto inicialmente e expresso pela equação 12.4,
o que confere crédito ao modelo pendular.
Outra vantagem do modelo pendular diz respeito a previsões para o período do movimento
como função do comprimento das pernas. Nesse caso, a perna dos animais será pensada como
um pêndulo físico (não um pêndulo simples). No caso do pêndulo simples, a relação entre o
L
período e o comprimento do pêndulo é T = 2π
. No entanto, a perna (não o animal todo),
g
pode ser pensada como um corpo rígido. Como consequência, o período de oscilação depende
de uma característica sua, denominada momento de inércia.Considerando agora a perna como
se fosse uma barra fina, e o seu centro de massa situando-se no meio da perna, então, o período
do movimento é dado por:
T = 2π
2L
3g
12.9
onde L é o comprimento do pêndulo, ou seja, o comprimento da perna do animal. No caso de
um homem cuja perna meça 80 cm, o seu período, de acordo com 12.9, é 1,46 s.
Dinâmica do Movimento dos Corpos
290
Licenciatura em Ciências · USP/Univesp · Módulo 1
E a sua velocidade quadrática média será dada por:
V =
3P
π P
=
4
2T
g
l
12.10
Admitindo-se uma passada de 80 cm, a velocidade desse indivíduo será:
V =
π 0, 8
km
= 1, 2 m/s = 4, 32
h
2 1, 46
Finalmente, se considerarmos a passada como igual ao comprimento das pernas, concluiremos que:
V =
3
lg
4
2.11
e, portanto, a velocidade do caminhar cresce com o comprimento
das pernas dos animais.
A aceleração máxima do caminhante é dada por:
Figura 12.12: Caminhada pendular
do homem.
2
m
m
2π
amax =
0.8 2 = 14, 8 2
s
s
1, 46
12.5 Velocidade dos Animais
Pode-se fazer uma previsão para a velocidade de um animal quando ele está correndo à
velocidade máxima, com base em uma análise dimensional, ou seja, admitimos que a distância
d contraída pelo músculo é proporcional a um fator de escala com dimensão de comprimento
(l), dito comprimento característico dos músculos, independentemente do animal. Escrevemos:
d = b1l
onde o parâmetro b1 depende do animal e pode ser considerado um parâmetro muscular.
12 Movimento dos Animais
12.12
Licenciatura em Ciências · USP/Univesp · Módulo 1
291
Admitamos, ainda mais, que a força máxima do músculo seja proporcional ao número de
fibras no músculo. Esse número, por sua vez, é proporcional à área da seção transversal. Essa
área é proporcional ao comprimento característico aludido antes (A = b2l2). Assim, escrevemos.
Fm = b2l 2
12.13
onde b2 é uma constante característica do animal. Finalmente, escrevemos a massa da pata como
se fosse proporcional ao cubo do comprimento característico do músculo, ou seja:
m = b3l 3
12.14
onde b3 depende da densidade da pata e da sua forma geométrica.
Assim, utilizando as expressões 12.12-12.14 em 12.3, inferimos que a velocidade máxima
de um animal que corre independe da dimensão característica, ou seja:
Vp = 2
b1b2
b3
12.15
Se considerarmos dois animais semelhantes quanto à forma, é de se esperar que os coeficientes bi
de cada um deles sejam iguais. Por exemplo, tendo em vista que a forma e a densidade da pata são semelhantes, o mesmo ocorrerá com o coeficiente b3.Assim, para dois animais semelhantes, escrevemos:
( b3 )1 = ( b3 )2
12.16
Portanto, todos os animais semelhantes quanto à forma terão os mesmos valores para as suas
velocidades máximas, ou seja, elas são independentes do tamanho dos animais, o que contrasta
com o a velocidade do caminhar, no qual ela depende, de acordo com 12.11, do tamanho das
pernas do animal, como se pode verificar pela Tabela 12.1 a seguir.
Tabela 12.1: Velocidade do caminhar dos animais.
Animais
Leopardo
Gazela
Avestruz
Raposa
Cavalo
Coelho
Lobo
Cão
V (m/s)
32
30
25
20
20
18
20
15
Dinâmica do Movimento dos Corpos
292
Licenciatura em Ciências · USP/Univesp · Módulo 1
12.6 O Voo das Aves
O voo das aves torna-se possível graças a quatro
forças que podem estar agindo simultaneamente
sobre os animais. Poderíamos adicionar uma quinta
- o empuxo, mas esta é desprezível. Essas forças são:
1. Força de arraste ( FA);
2. Força de sustentação ( FS );
3. Força de impulsão ou propulsão( FP );
4. Força da gravidade(P).
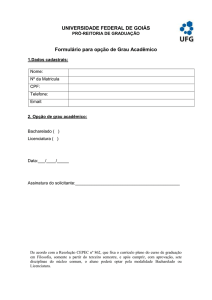
Na Figura 12.13 ilustramos três dessas forças no
caso em que uma ave se desloca para cima e para a
frente. A seguir, faremos uma descrição sucinta dessas
forças e três tipos de voos: paraquedismo, planeio e,
finalmente,movimentos com propulsão.
Dentro de uma boa aproximação, podemos adotar
as forças de arraste como ortogonais às forças de sustentação. Escrevemos:
FA i FS = 0
Figura 12.13: Forças de arraste e de sustentação se
somam constituindo a força aerodinâmica e essa exibe
uma componente vertical e uma componente horizontal.
A componente vertical da força aerodinâmica é uma
força de sustentação da ave nessa direção e que pode
ser maior, igual ou menor do que o seu peso.
12.17
A validade desse resultado está relacionada com a origem das próprias forças. A força de
arraste tem a direção oposta à do movimento enquanto a de sustentação tem uma direção
ortogonal ao sentido do movimento (Figura 12.13).
As aves podem, ainda, ser impulsionadas por correntes de ar. Trata-se de uma força de natureza colisional, isto é, a colisão das moléculas do ar no sentido ascendente com as asas das aves
gera uma força sobre elas, impulsionando-as na direção do ar.
As aves podem ganhar altitudes de até 5 km fazendo uso de correntes de ar ascendente.
Podemos citar dois tipos bastante comuns de tais correntes. A primeira resulta do movimento do
ar em direção a uma montanha, ou até mesmo uma colina. A corrente resultante do movimento
associado ao desvio do obstáculo gera uma corrente do tipo plano inclinado, só que, nesse caso,
o movimento ao longo do plano inclinado é para cima. O segundo tipo de corrente são as termas.
12 Movimento dos Animais
Licenciatura em Ciências · USP/Univesp · Módulo 1
293
Nesse caso, o ar quente próximo da superfície terrestre, sendo menos denso, sobe. Produz assim
uma corrente ascendente, da qual as aves tiram proveito.
Dizemos que uma ave f lutua quando a sua altura, em relação à superfície da Terra (do
mar), permanece constante. As aves podem f lutuar sob a ação de correntes ascendentes.
Figura 12.14: Uma ave utilizando uma corrente ascendente.
12.7 Força de arraste
Se o movimento se dá ao longo do eixo z, a componente da força de arraste na direção do
movimento depende da componente da velocidade nessa direção. Ela assume a forma geral
envolvendo potências da componente da velocidade,ou seja:
Fz = − κ ( v z )
n
12.18
onde κ é uma constante.
Como veremos a seguir, a potência depende do regime do movimento do fluido.
A expressão 12.18 para a força exercida por um fluido, quando do movimento de um objeto
nele imerso, só vale para pequenas velocidades, ou seja, quando se trata do regime dito laminar.
Nesse regime, a força é de natureza viscosa; resulta apenas da colisão do objeto em movimento
com os átomos do fluido.
No regime laminar, a velocidade do fluido em relação ao objeto é a mesma ao longo de uma
lâmina. As moléculas de uma determinada lâmina não interagem com as moléculas de outras
lâminas. O movimento é mais organizado. Observe a Figura 12.16a.
Dinâmica do Movimento dos Corpos
294
Licenciatura em Ciências · USP/Univesp · Módulo 1
• Exemplo 4
G. G. Stokes (1819-1903) deduziu a força de arraste sobre uma pequena partícula esférica
(0,0002 mm ≤ diâmetro ≤ 0,2 mm), que se movimenta ao longo do eixo 0z no seio de um fluido viscoso à velocidade constante e de baixa intensidade. A expressão é conhecida como fórmula de Stokes:
Fz = −3π.η.d .v z
onde η = coeficiente de viscosidade do fluido, d = diâmetro da esfera e vz = velocidade da esfera
em relação ao fluido.
a. Compare a fórmula de Stokes com a expressão 12.18, e indique a potência n e a expressão para
a constante k.
b. Considere uma gotícula de chuva despencando no ar (sem movimento). Quando a velocidade
atingir o seu valor terminal (v = constante), determine a expressão da força de arraste sobre a
gotícula e a respectiva velocidade com que a gota colide com o solo.
→ Resolução:
Consideremos o movimento num regime laminar.
a. Na fórmula de Stokes (3π.η.d)= kstokes e a fórmula pode assim ser escrita: Fz = −kstokes .vz.
Comparando com a expressão Fz = −k(vz)n, podemos concluir que n = 1 e k = 3π.η.d.
b. Vamos considerar uma gotícula
de água de raio d em queda no ar (sem movimento). Na Figura 12.15
o vetor E representa o empuxo do ar sobre a gotícula de água.
Aplicando a 2ª Lei de Newton no eixo 0z:
m
dvz
= ( −mg ) + m ′g + F
dt
(I)
onde m′ = massa de ar deslocado pela gotícula e F = força de arraste. A velodv
cidade limite é atingida quando vz = constante ou z = 0. Nessa condição, a
dt
expressão I acima pode ser escrita: 0 = − (m − m′)g + F donde
F = (m − m′).g
Figura 12.15: Gotícula de chuva
caindo na vertical. Admitimos o
ar sem movimento.
As massas podem ser expressas em função das respectivas densidades e volumes:
πd 3
πd 3
mρágua
e m′ρar
.
6
6
Sendo estas substituídas na expressão II, teremos:
πd 3
F = (ρágua − ρar )
⋅ g
6
que é a expressão da força de arraste sobre a gotícula.
12 Movimento dos Animais
( II )
12.19
Licenciatura em Ciências · USP/Univesp · Módulo 1
295
A velocidade terminal pode ser determinada considerando-se F = a força de Stokes, ou seja,
πd 3
3π.η.d .v z = (ρágua − ρar )
⋅ g
6
e, portanto,
d2
v z = (ρágua − ρar )
⋅ g
18.η
12.20
que é a velocidade com que a gota de chuva colide com o solo.
Considerando uma gota de chuva com diâmetro d = 0,2 mm; viscosidade η = 1,8 × 10−5 s.Pa;
ρágua = 10³ kg/m³; g = 10 m/s² e desprezando-se ρar (por ser desprezível ante a densidade da água),
a velocidade terminal dessa gota é vz = 2,8 m/s.
Na ausência da força de arraste, a gota cairia em queda livre; nesse caso, se a nuvem de onde a gota
iniciou a sua queda estivesse a 200 metros de altura, ela atingiria o solo com velocidade aproximada
de 230 km/h.
12.8 Força no Regime Turbulento
No regime dito turbulento, ocorrem interações
entre as diversas moléculas. O movimento é muito
mais complexo, mais desorganizado. As linhas de força
exibem um padrão que pode ser representado pela
Figura 12.16b.
O que caracteriza cada um dos regimes é o número
de Reynolds, Re, o qual depende, entre outros parâmetros, da velocidade do fluido em relação ao objeto.
Para números de Reynolds pequenos, o regime é
laminar, enquanto, para números de Reynolds grandes
(acima de 1.000), o regime é turbulento.
a
b
Figura 12.16: Campos de velocidade no regime
laminar (a) e turbulento (b).
Dinâmica do Movimento dos Corpos
296
Licenciatura em Ciências · USP/Univesp · Módulo 1
Ao atingir o regime turbulento,a força de arraste sobre um objeto, quando este se movimenta ao longo do eixo z tem componente Fz que pode ser escrita como:
1
2
Fz = − ρCa A ( v z )
2
12.21
onde ρ é a densidade do ar (quando o fluido é o ar), Ca é o coeficiente de arrasto (o qual
depende da geometria do objeto), A é a área do objeto em contato com o fluido e vz é a
componente z da velocidade.
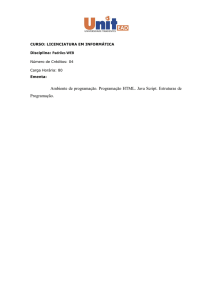
Na Tabela 12.2 apresentamos alguns valores típicos e aproximados dos coeficientes de
arrasto para diferentes designs de automóveis.
Tabela 12.2: Alguns valores do coeficiente de arrasto.
Forma
Ca
0,8-0,9
0,35
0,24
0,16
0,13
12.9 Movimento de Planeio
O movimento de planeio de um animal é aquele que tem a trajetória linear. O ângulo θ entre
a linha reta e a direção horizontal, definida a partir do plano que tangencia a superfície terrestre, é
denominado ângulo de planeio. Em geral, tal tipo de movimento é caracterizado pelas condições:
FP = 0
12 Movimento dos Animais
FS FA ou ainda FS > FA
12.22
Licenciatura em Ciências · USP/Univesp · Módulo 1
297
Quando um animal estiver planando, as equações do movimento são dadas por:
dV y
= ( FS ) y + ( FA ) y − mg
dt
dV
m x = ( FS ) x + ( FA ) x
dt
m
12.23
Nas condições especificadas em 12.22, obtemos:
dV FS
=g+
dt
m
12.24
Figura 12.17: Movimento de Planeio.
12.10 Movimento de Paraquedismo
O movimento é dito de paraquedismo quando a ave, ou qualquer outro animal, se
movimenta sob a ação da força de arraste e a gravitacional. Mais geralmente, escrevemos para o
movimento de paraquedismo:
=
FP 0=
FA FS ou ainda FS 0
12.25
O mesmo comportamento para os objetos que caem, de adquirir velocidade constante
depois de um certo tempo, vale para o movimento de planeio.
A força de arraste é aquela exercida pelo fluido sobre a partícula em movimento, de tal
forma a se opor ao movimento. Em Forças, admitimos que essa força é da forma:
F = −bV
12.26
onde o coeficiente b depende da viscosidade do fluido e da sua forma geométrica. O sinal
menos na expressão acima significa apenas que a força é contrária ao movimento, ou seja, ela
Dinâmica do Movimento dos Corpos
298
Licenciatura em Ciências · USP/Univesp · Módulo 1
tem o sentido contrário ao sentido do movimento que tem o sentido da velocidade, pois, como
sabemos, a velocidade sempre indica para onde a partícula vai logo em seguida. O sinal menos
indica que essa força atua sempre impedindo o movimento.
A força se comporta de acordo com a expressão 12.26 apenas no regime laminar.
12.11 Movimento de Paraquedismo
no Regime Laminar
Consideremos o caso de um objeto que é solto dentro de
um líquido viscoso e que agora é colocado em movimento
sob a ação da gravidade. Nesse caso, devemos levar em conta,
além da força da gravidade, a força exercida pelo fluido viscoso. Admitiremos, ainda mais, que o movimento se dá ao
longo do eixo y, pois agora o movimento é na vertical.
Assim, levando em conta a força exercida pelo fluido
como se fosse diretamente proporcional à velocidade, e a
força gravitacional como constante, escrevemos a seguinte
equação de primeira ordem para a velocidade da esfera:
m
dV y ( t )
dt
Figura 12.18: Movimento de Paraquedismo:
Relevância de arraste.
= −bV y ( t ) + mg
12.27
ou, de uma forma equivalente:
dV y ( t )
g
Vy ( t ) +
γ
= − γdt
12.28
onde γ = b/m. Integrando membro a membro a equação acima, obtemos a solução para a
velocidade em função da velocidade inicial (no caso em que ela é solta, essa velocidade é nula);
g
g − γ t −t
V y ( t ) = − + V y ( t0 ) + e ( 0 )
γ
γ
12 Movimento dos Animais
12.29
Licenciatura em Ciências · USP/Univesp · Módulo 1
299
A primeira conclusão a que chegamos é a de que, independentemente do valor da velocidade
inicial, a partícula atinge uma velocidade final, que é constante, e que é dada por:
g
V y ( final ) = −
γ
12.30
Observe que essa velocidade final é exatamente aquela para a qual a força exercida pelo
líquido se torna igual à força gravitacional. De fato, de 12.26, vemos que tal condição implica:
−bV y ( final ) − mg = 0
12.31
Infere-se da equação de Newton, portanto, que, ao atingir essa velocidade limite, a partícula
se movimenta com velocidade constante, fato esse que se pode comprovar experimentalmente.
A solução para a posição como função do tempo é:
g
g − γ t −t
1
y ( t ) = y ( 0 ) − ( t − t0 ) − V y ( t0 ) + e ( 0 ) − 1
γ
γ
γ
(
)
12.32
Da solução acima concluímos que, no limite em que o tempo tende a infinito, temos:
g
g
1
y ( t → ∞ ) ≅ y ( 0 ) − ( t − t0 ) + V y ( t0 ) +
γ
γ
γ
12.33
o que, de novo, indica que, com o passar do tempo, o movimento da esfera tende a ser um
movimento uniforme.
12.12 Movimento de paraquedismo
no Regime Turbulento
Consideremos agora o caso de uma força que depende do quadrado da velocidade. Nesse
caso, a lei de Newton se escreve como:
m
dV ( t )
= − BV 2 ( t ) + mg
dt
12.34
Dinâmica do Movimento dos Corpos
300
Licenciatura em Ciências · USP/Univesp · Módulo 1
Apesar de ter a mesma forma da equação anterior, a equação 12.34 não é linear, ou seja,
não vale o princípio da superposição para ela. Como no caso anterior, no entanto, podemos
escrevê-la de uma forma equivalente à expressão 12.28, ou seja,
dV y ( t )
g
Vy ( t ) +
γ
= − γdt
12.35
2
onde, agora, γ = B/m. Integrando membro a membro a equação acima, obtemos a solução para
o caso de uma velocidade inicial diferente de zero, ou seja:
1/ 2
g
V y ( t ) = V y ( 0 ) + tanh − g γ t
γ
12.36
Assim, nos instantes de tempo iniciais, caracterizados pela condição t (gγ)−1/2, podemos
verificar que o movimento é acelerado, pois nesse caso vale o resultado aproximado:
V y ( t ) ≈ V y ( 0 ) + gt
12.37
enquanto, para grandes valores do intervalo de tempo, caracterizados pela condição t (gγ)−1/2,
a solução 12.36 nos leva a um valor constante da velocidade, e esse valor, considerando-se agora
o caso de velocidade inicial nula, é dado por:
1/ 2
g
Vy ( t ) =
γ
12.38
valor esse que poderíamos deduzir do fato de que nesse limite as forças se compensam, levando-nos
ao resultado:
− BV y ( t ) + mg = 0
2
1/ 2
g
⇒ Vy ( t ) =
γ
12.39
Concluímos assim que, como no caso anterior, a partícula atinge uma velocidade final constante.
Se a partícula parte de uma posição inicial y(0) = 0, sua coordenada y dependerá do tempo
da seguinte forma:
1
y ( t ) = ln cosh
γ
12 Movimento dos Animais
(
g γt
)
12.40
Licenciatura em Ciências · USP/Univesp · Módulo 1
301
E, portanto, nos instantes iniciais do movimento (t (gγ)−1/2), temos:
y (t ) ≅
1 2
gt
2
12.41
ao passo que, nos instantes finais (aqueles para os quais vale a desigualdade t (gγ)−1/2), o
movimento será uniforme. Nesse limite, a solução 12.40 nos leva ao resultado:
y (t ) ≅
g 1
t−
( ln 2 )
γ γ
12.42
o qual é inteiramente compatível com o movimento uniforme dado em 12.39.
12.13 Forças resultantes de diferenças de pressão
Por causa da impenetrabilidade da matéria, ou seja,do caráter repulsivo das forças intermoleculares, os fluidos exercem uma pressão. Normalmente, essa pressão equilibra o efeito da
gravitação. Esse é um tema que é objeto de estudo da Hidrostática.
Num fluido em equilíbrio, todos os pontos a uma
mesma profundidade estão sujeitos à mesma pressão.
Esta, no entanto, depende linearmente da profundidade. Um corpo, como um cubo, quando submerso
num líquido, está sujeito a uma pressão na sua parte
inferior (a base do cubo), que é maior do que aquela
vigente na sua parte superior. Resulta daí que um
corpo imerso num líquido experimentará a ação de Figura 12.19: Pressão como função da profundidade e o
efeito da diferença de pressão num corpo imerso num fluido.
uma força, denominada empuxo.
Por causa da baixa densidade do ar, a força denominada empuxo é desprezível no voo das aves
e dos animais em geral, ou seja, o peso do líquido deslocado é desprezível ante o peso do objeto.
Dinâmica do Movimento dos Corpos
302
Licenciatura em Ciências · USP/Univesp · Módulo 1
12.14 Forças de Sustentação
Outro exemplo de força resultante de diferenças de pressão é a força de sustentação - aquela que
consegue, quando em pleno voo, se equilibrar com a força gravitacional agindo sobre um avião.
Ela surge, no entanto, apenas quando esse objeto está dotado de movimento em relação ao ar.
O equilíbrio só é conseguido ao atingir uma velocidade mínima.
As asas, tanto dos aviões quanto dos pássaros, têm uma forma tal que sob elas a pressão é maior
na sua parte inferior e menor na sua parte superior. Isso ocorre porque o seu design acarreta uma
velocidade do ar maior na parte superior
do que na parte inferior. E isso leva às
diferenças de pressão mencionadas.
As diferenças de pressão entre a parte
superior da asa e a inferior acarretam
uma força dita de sustentação. É uma
Figura 12.20: Força de sustentação agindo sobre asas de um pássaro.
força aerodinâmica.
12.15 Força de impulsão: voo com propulsão
É a força que impulsiona os animais, por exemplo, quando do movimento a partir do
repouso. Nesse caso, dizemos que o voo é com propulsão. Ele ocorre quando o animal bate as
asas. Ao fazê-lo, as asas empurram o ar na direção contrária ao do movimento.
A força propulsora resulta da interação das asas com o ar no entorno. Essa força será desig
nada por Fp, e pode ser entendida como uma força de reação exercida pelo ar.
Figura 12.21: Voo com propulsão.
12 Movimento dos Animais
Figura 12.22: Voo sem propulsão.
Licenciatura em Ciências · USP/Univesp · Módulo 1
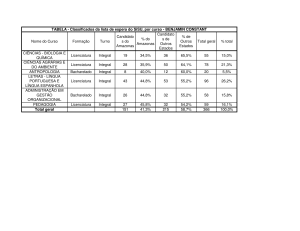
a
303
b
Figura 11.23: (a) As quatro forças que agem no voo das aves (para cima e para frente). (b) A resultante das quatro forças R determina a
direção da velocidade da ave.
Agora é sua vez...
Acesse o Ambiente Virtual de Aprendizagem e
realize a(s) atividade(s) proposta(s).
Dinâmica do Movimento dos Corpos