Universidade Federal de Alagoas
Centro de Tecnologia
Curso de Engenharia Civil
Disciplina: Mecânica dos Sólidos 2
Código: ECIV030
Professor: Eduardo Nobre Lages
Análise de Tensões
Maceió/AL – Agosto/2014
Motivação
Pmax = ?
d d
Trabalhando em termos de esforços internos
solicitantes
solicitantes, cada conjunto de dimensões exigiria
um ensaio para verificar a carga máxima.
Eduardo Nobre Lages – CTEC/UFAL
L
Vetor de Tensão
Em 1822
introduziu o
conceito de
tensão na
Teoria da
Elasticidade
z
y
x
r
t
r
−t
Hipótese clássica:
A interação entre as partes do corpo é idealizada através de uma
distribuição de forças (no caso geral com variação da intensidade
e da direção) ao longo da seção
r de corte, representada pelo
denominado vetor de tensão t .
Eduardo Nobre Lages – CTEC/UFAL
Augustin Louis Cauchy
(1789-1857)
Vetor de Tensão
r
−t
Alguns aspectos:
- Hipótese clássica (interação pontual: força)
Hipótese de Cosserat (interação pontual: força e binário)
- O sólido é um meio contínuo (visão macroscópica).
- Teoria das Estruturas: o sistema força-binário equivalente à
distribuição do vetor de tensão na seção decompõe-se nos
esforços internos solicitantes.
Eduardo Nobre Lages – CTEC/UFAL
r
t
Decomposição do Vetor
de Tensão
r .
tT
n̂ : vetor unitário (versor)
normal ao plano de corte
e saindo do sólido.
r
tN
.
r
t
Tensão
normal
r
t N = σ n̂
r r r
tT = t − t N
r
tT = τ
Tensão
cisalhante
r
tN
r
tT
: componente normal do vetor de tensão.
: solicitação interna que provoca uma tendência de afastamento
(ou aproximação) das partes do sólido na direção perpendicular
ao plano de corte.
: componente tangencial (ou cisalhante) do vetor de tensão.
: solicitação interna que provoca uma tendência de deslizamento
das partes do sólido ao longo do plano de corte.
Eduardo Nobre Lages – CTEC/UFAL
.
O Vetor de Tensão e o
Plano de Corte
O vetor de tensão e seus componentes variam com a direção
do plano de corte.
y
y
P
r P
t = î
A
z
z
x
P
y
σ=
P
A
τ=0
y
x
P
P
θ
z
z
r P
t = cos θ î
A
P
σ = cos 2 θ
A
x
P
τ=
x
P
sin 2θ
2A
Eduardo Nobre Lages – CTEC/UFAL
P
Estado de Tensão em
um Ponto
No entanto, o estado de tensão de um ponto pode ser
caracterizado a partir do conhecimento dos componentes
normal e tangencial do vetor de tensão em relação a três
planos mutuamente ortogonais (geralmente são empregadas
as direções do sistema de coordenadas de referência do
corpo).
Assim como foi feito para os esforços internos solicitantes,
define-se uma orientação desses componentes em relação à
porção do corpo analisada.
analisada
Os componentes do vetor de tensão em relação aos três
planos mutuamente ortogonais serão organizados para
formar o denominado tensor de tensão.
tensão
Eduardo Nobre Lages – CTEC/UFAL
Conhecimento dos componentes normal e tangencial
do vetor de tensão para todos os planos de corte.
Componentes do Tensor
de Tensão
σ zz
z
σ zx
x
σ xz
σ xy
σ zy
σ yz
σ yx
σ yy
σ xx
Observação:
As convenções anteriormente estabelecidas referem-se às faces
denominadas de positivas (vetor normal na direção do eixo
cartesiano). Para as faces contrárias (faces negativas) os sentidos
dos componentes são contrários aos dos eixos coordenados.
Eduardo Nobre Lages – CTEC/UFAL
y
Representações do
Tensor de Tensão
σ zz
z
y
x
σ yy
σ zy
σ zx
σ xz
σ xx
σ xx
σ yz
σ xy σ yx
σ zz
σ yy
Atenção: Apesar desta visão
volumétrica do estado de tensão, o
mesmo corresponde às informações
de um ponto do sólido analisado.
Matemática
σ xx
[ σ ] = σ yx
σ
zx
σ xy
σ yy
σ zy
σ xz
σ yz
σ zz
Índices dos componentes:
O 1º índice indica a direção normal à face de atuação
e o 2º índice indica a direção do componente.
Eduardo Nobre Lages – CTEC/UFAL
Gráfica
Representações do
Tensor de Tensão
Estado uniaxial de tensão
Gráfica
y
σ xx
x
σ xx
Matemática
σ xx
[σ ] = 0
0
0
0
0
0
0
0
Eduardo Nobre Lages – CTEC/UFAL
z
Representações do
Tensor de Tensão
Estado biaxial de tensão
Gráfica
y
σ xx
x
σ xx
σ yy
Matemática
σ xx
[σ ] = 0
0
0
σ yy
0
0
0
0
Eduardo Nobre Lages – CTEC/UFAL
z
σ yy
Representações do
Tensor de Tensão
Estado triaxial de tensão
Gráfica
y
σ xx
σ zz
x
σ xx
σ zz
σ yy
Matemática
σ xx
[σ ] = 0
0
0
σ yy
0
0
0
σ zz
Eduardo Nobre Lages – CTEC/UFAL
z
σ yy
Representações do
Tensor de Tensão
Estado plano de tensão
Gráfica
y
σ xx
z
x
σ yx
σ xy
σ yy
σ xx
Matemática
σ xx
[σ ] = σ yx
0
σ xy
σ yy
0
0
0
0
Eduardo Nobre Lages – CTEC/UFAL
σ yy
Representações do
Tensor de Tensão
Estado plano de tensão generalizado
Gráfica
y
yy
xx
yx
x
xy
zz
yy
xx
Matemática
xx
yx
0
xy
yy
0
0
0
zz
Eduardo Nobre Lages – CTEC/UFAL
z
zz
Vetor de Tensão em
um Plano Arbitrário
Tensor de
Tensão
Vetor de Tensão
em qualquer
plano de corte
Eduardo Nobre Lages – CTEC/UFAL
?
Vetor de Tensão em
um Plano Arbitrário
C
n̂
∆z
.
0
∆x
A
x
∆y
∆y∆z ∆A x
B
1
1
∆A = AB × AC = ∆x∆z = ∆A y
2
2
y
∆A
∆
x
∆
y
z
∆A x = ∆A n x
∆ A y = ∆ A n y ou ∆ A i = ∆ A n i
∆A = ∆A n
z
z
(
)
Eduardo Nobre Lages – CTEC/UFAL
z
n x
Versor normal ao plano inclinado: n̂ = n y
n
z
n x
Vetor área ABC: ∆A = ∆A n̂ = ∆A n y
n
z
Vetor de Tensão em
um Plano Arbitrário
No diagrama de corpo livre em questão, considerar
ainda a presença de uma força de volume
r
t
y
x
b x
r
b = b y
b
z
Impondo o equilíbrio de forças ao longo
das direções cartesianas:
∑F
x
=0
0
t x ∆A − σ xx ∆A x − σ yx ∆A y − σ zx ∆A z + b x ∆V = 0
t x = σ xx n x + σ yx n y + σ zx n z
Eduardo Nobre Lages – CTEC/UFAL
z
Vetor de Tensão em
um Plano Arbitrário
Impondo-se o equilíbrio nas outras
duas direções cartesianas, por
analogia chega-se a
z
t y = σ xy n x + σ yy n y + σ zy n z
y
Combinando-se as três equações
{t} = [σ] {n}
T
x
ou t i = σ ji n j
Eduardo Nobre Lages – CTEC/UFAL
r
t
t z = σ xz n x + σ yz n y + σ zz n z
Transformação no
Tensor de Tensão
x*
z
x
σ zz
σ zy
σ zx
σ xz
σ xx
σ xy
σ xx
[σ] = σyx
σzx
σx*x*
y*
σ y*x*
σ y*y*
σ yz
σ yx
σ yy
σzy
σ xz
σ yz
σzz
σz*z*
σz*y*
σ y*z*
σz*z*
σ xy
σ yy
σz*x*
σ y*y*
σ x*z*
σ x*x*
σx*y*
σ x*x* σ x*y*
σ* = σ y*x* σ y*y*
σz*x* σz*y*
[ ]
σx*z*
σ y*z*
σz*z*
Eduardo Nobre Lages – CTEC/UFAL
y
z*
Transformação no
Tensor de Tensão
No caso geral os tensores de tensão anteriores podem
apresentar componentes diferentes,
diferentes porém os dois representam
o mesmo estado de tensão de um ponto do sólido analisado.
Isso posto, reconhece-se que haja uma relação de transformação
entre esses dois tensores:
[σ ] = [T][σ][T]
T
n x *x
onde [T ] = n y*x
n z* x
n x *y
n y* y
n z* y
n x *z
n y*z
n z*z
Cada coluna da matriz de transformação [T] corresponde ao versor
do antigo eixo associado a esta coluna, em relação ao novo
sistema de referência x*y*z*.
Eduardo Nobre Lages – CTEC/UFAL
*
Transformação no
Tensor de Tensão
Inicialmente definimos os vetores de tensão atuantes em planos
perpendiculares aos eixos do sistema original (xyz) lidos em
relação ao novo sistema (x*y*z*), dados por:
[ ] {i
}= σ
* T
x * y*z *
}
[ ]
{t xj *y*z*} = σ* T {jx*y*z*}
{t
k
x*y*z*
[ ] {k
}= σ
* T
x *y*z*
}
Eduardo Nobre Lages – CTEC/UFAL
{t
i
x *y*z*
Transformação no
Tensor de Tensão
Da saudosa Álgebra Linear sabe-se que a transformação linear
de vetores representados no sistema (xyz) para ser lido no
novo sistema (x*y*z*) é dada por:
{v*} = [T ]{v}
[T] = [{i x*y*z*}
{jx*y*z*} {k x*y*z*}]
Uma vez que a transformação linear envolvida entre os dois
sistemas é de rotação, a transformação inversa é dada por
{v} = [T ]{v }
*
onde
[T* ] = [T]T
*
Eduardo Nobre Lages – CTEC/UFAL
onde as colunas da matriz [T] da transformação linear são formadas
pelas leituras dos versores da base canônica do sistema (xyz) no
novo sistema (x*y*z*). Portanto,
Transformação no
Tensor de Tensão
Usando as relações anteriores, vamos escrever agora os
vetores de tensão atuantes em planos perpendiculares aos
eixos do novo sistema (x*y*z*) lidos em relação ao mesmo
sistema (x*y*z*).
} = [T ]{t
{t
j*
x * y*z *
{t
i*
xyz
} = [T ][σ ] {i }
T
*
xyz
} = [T ]{t } = [T ][σ ] {j }
k*
x * y*z *
j*
xyz
T
*
xyz
} = [T ]{t } = [T ][σ] {k *xyz }
k*
xyz
T
Eduardo Nobre Lages – CTEC/UFAL
{t
i*
x *y*z*
Transformação no
Tensor de Tensão
Por fim, organizam-se os vetores anteriores na forma
} {t
j*
x*y*z*
} {t
*
*
*
[
][
]
T
σ
[{i
}
{j
}
{k
}] =
xyz
xyz
xyz }]
T
T
* T
[
][
]
[
]
T
σ
T
[σ ] =
k*
x*y*z*
T
[σ ] = [T][σ][T]
*
T
Eduardo Nobre Lages – CTEC/UFAL
[{t
i*
x *y*z*
Equações Diferenciais
de Equilíbrio
Motivação: De que forma variam os componentes do tensor
de tensão em um corpo solicitado por alguma ação externa?
Recapitulando: Em termos dos esforços internos solicitantes
e de ações externas generalizadas tem-se
dQ
= − q (s)
ds
dM
= Q − m (s)
ds
Eduardo Nobre Lages – CTEC/UFAL
dN
= − p (s)
ds
Equações Diferenciais
de Equilíbrio
z
y
x
z
B : ( x x / 2, y, z)
x
y
C : ( x , y y / 2, z)
D : ( x , y y / 2, z)
E : ( x , y, z z / 2)
F : ( x , y, z z / 2)
Obs: Considerar a presença de uma força de volume (bx, by e bz).
Eduardo Nobre Lages – CTEC/UFAL
P : ( x , y, z )
A : ( x x / 2, y, z)
Equações Diferenciais
de Equilíbrio
Axx yz Bxx yz Cyx xz Dyx xz Ezx xy
Fzx xy b Px xyz 0
Pxx
(
x
Pyx
P
( yx
y
P
xx
x
Pxx
P
)yz ( xx
2
x
Pyx
y
P
)xz ( yx
2
y
x
)yz
2
y
)xz
2
Pzx z
Pzx z
P
(
)xy ( zx
)xy
z 2
z 2
b Px xyz 0
P
zx
xx yx zx
bx 0
x
y
z
Eduardo Nobre Lages – CTEC/UFAL
Fx 0
Equações Diferenciais
de Equilíbrio
y
0
x
F
z
0
yy
y
zy
z
by 0
xz yz zz
bz 0
x
y
z
Resumindo:
ji, j bi 0
Eduardo Nobre Lages – CTEC/UFAL
F
xy
Equações Diferenciais
de Equilíbrio
0
( Cyz xz)
y
y
z
z
( Dyz xz)
( Ezy xy)
( Fzy xy)
0
2
2
2
2
Cyz Dyz Ezy Fzy 0
P
P
y
yz
yz y
( Pyz
) ( Pyz
)
y 2
y 2
P
P
z
zy
zy z
( Pzy
) ( Pzy
)0
z 2
z 2
yz zy
Eduardo Nobre Lages – CTEC/UFAL
M
P
x
Equações Diferenciais
de Equilíbrio
P
y
xz zx
0
M
P
z
0
xy yx
Resumindo:
ij ji
O tensor de tensão é simétrico.
Eduardo Nobre Lages – CTEC/UFAL
M
Condições de
Contorno Naturais
As condições de contorno naturais correspondem a
equações de prescrição do vetor de tensão nas regiões
do contorno do sólido onde se têm forças de superfície
de valores conhecidos, levando a
r r
t = t em Γσ
Eduardo Nobre Lages – CTEC/UFAL
Γσ
A Tensão Normal e o
Tensor de Tensão
{t N } = σ{n}
{t N } = ({t} {n}){n}
T
{t N } = ({n} [σ]{n}){n}
Pode ser entendido
como o vetor projeção
do vetor de tensão na
direção normal ao
plano de corte.
σ = {n} [σ]{n}
T
Eduardo Nobre Lages – CTEC/UFAL
T
Tensões e Direções
Principais
Motivação: Existe algum plano virtual de corte onde todo o
vetor de tensão está na direção normal ao mesmo, ou seja,
ele só se resume ao componente normal?
{t} = {t N }
σ e {n} são incógnitas
Problema de valor principal estudado
na saudosa Álgebra Linear
Eduardo Nobre Lages – CTEC/UFAL
[σ] {n} = σ{n}
T
Tensões e Direções
Principais
Observação:
Trata-se de um problema de determinação de valores
estacionários de uma função escalar no R3, no caso a
tensão normal, sujeito à restrição de que o vetor {n}
que define o plano virtual de corte é unitário.
Eduardo Nobre Lages – CTEC/UFAL
Recairíamos no mesmo problema de valor principal caso
fosse proposta a determinação dos valores estacionários,
que incorporam os valores extremos, da tensão normal e
dos respectivos planos de atuação.
Tensões e Direções
Principais
Problema de valor principal:
[σ] {n} = σ{n}
T
Observação: Organizam-se as tensões principais na
ordem σ1 ≥ σ2 ≥ σ3, com isso σ1 e σ3 correspondem,
respectivamente, ao maior e menor valores da tensão
normal para os infinitos planos virtuais de corte.
Eduardo Nobre Lages – CTEC/UFAL
Solução: Três pares: 3 tensões principais (σ1, σ2 e σ3) com as
respectivas direções principais (mutuamente ortogonais).
Tensões e Direções
Principais
σ yy
σ xx
σ zy
σ xz
σ xx
σ xy
σ yz
σ yx
σ zz
σ3
y
x
σ yy
σ2
σ2
σ3
σ1
Para todo ponto de um corpo, existe sempre um
sistema de referência (principal) onde só atuam
tensões normais. A orientação deste sistema principal
em relação ao sólido analisado independe do
sistema de referência adotado.
Eduardo Nobre Lages – CTEC/UFAL
σ zz
σ zx
σ1
z
Tensões e Direções
Principais
Solução do problema de valor principal:
([σ]
T
)
− σ[I] {n} = {0}
Solução não trivial do sistema homogêneo
Polinômio característico onde as
raízes independem do sistema de
referência adotado
σ 3 − I1σ 2 + I 2 σ − I 3 = 0
Obs:: I1, I2 e I3 são denominados invariantes do tensor de tensão
Obs
tensão.
Eduardo Nobre Lages – CTEC/UFAL
Determinante nulo da matriz dos coeficientes
Tensões e Direções
Principais
Solução do problema de valor principal (cont.):
Em relação a um sistema de referência qualquer:
σ xx
σ xy
σ yx
σ yy
σ xx
σ xy
σ xz
I 3 = σ yx
σ yy
σ yz
σzx
σzy
σ zz
I2 =
+
σ xx
σ xz
σzx
σzz
+
σ yy
σ yz
σzy
σzz
Observação: | | significa
determinante.
Em relação ao sistema de referência principal:
I1 = σ1 + σ2 + σ3
I 2 = σ1σ 2 + σ1σ3 + σ 2σ3
I 3 = σ1σ2 σ3
Eduardo Nobre Lages – CTEC/UFAL
I1 = σ xx + σ yy + σzz
Tensões e Direções
Principais
Eduardo Nobre Lages – CTEC/UFAL
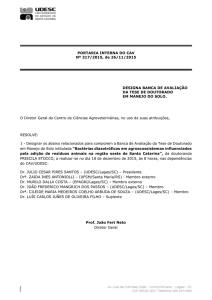
Solução do problema de
valor principal (cont.):
“Círculo” de Mohr
A região é delimitada por três semicircunferências
que apresentam os pares (σ1,0), (σ2,0) e (σ3,0), dois
a dois, em posições diametralmente opostas.
Eduardo Nobre Lages – CTEC/UFAL
Conjunto dos pares de valores da tensão normal e da
tensão cisalhante para os infinitos planos virtuais de
corte em um ponto material de um sólido deformável.
Componentes Isotrópico e
Desviador do Tensor de Tensão
Componente isotrópico do tensor de tensão:
σ m
[σ m ] = 0
0
0
σm
0
0
0
σ m
σm =
σ xx + σ yy + σ zz
3
=
I1
3
Componente desviador do tensor de tensão:
σ xx − σ m
[s] = [σ] − [σ m ] = σ yx
σ zx
σ xy
σ yy − σ m
σ zy
σ zz − σ m
σ xz
σ yz
Em materiais isotrópicos é responsável apenas
pela mudança de forma (distorção).
Eduardo Nobre Lages – CTEC/UFAL
Em materiais isotrópicos é responsável
apenas pela variação de volume.
Critérios de Resistência
Leis empíricas, fundamentadas através de observações
experimentais, com resultados tratados estatisticamente, propostas
para estabelecer as condições em que ocorre a falha em um ponto
material de um objeto estrutural, ou seja, quando esse ponto
material deixa de apresentar um desempenho desejado.
Eduardo Nobre Lages – CTEC/UFAL
Existem ensaios específicos para caracterização da resistência,
de acordo com a natureza do material analisado:
Critérios de Resistência
Graficamente os critérios de resistência podem ser
analisados no espaço bidimensional das tensões
normais e cisalhantes ou no espaço tridimensional
das tensões principais.
Eduardo Nobre Lages – CTEC/UFAL
Em materiais isotrópicos, essas leis empíricas devem se basear,
por exemplo, em indicadores invariantes do tensor de tensão.
Critérios de Resistência
Critério da máxima tensão normal (ou de Rankine):
Postula que, para materiais frágeis, a maior tensão de tração
e a maior tensão de compressão não devem ultrapassar os
valores das tensões limites obtidas, respectivamente, nos
ensaios de tração simples e de compressão simples.
S
F
F
Eduardo Nobre Lages – CTEC/UFAL
•
Critérios de Resistência
Critério da máxima tensão cisalhante (ou de Tresca):
Postula que, para materiais dúcteis, o mecanismo de falha
ocorre pelo deslizamento atômico em planos de maior tensão
de cisalhamento, quando essa ultrapassa o valor da tensão
limite de cisalhamento.
𝜏
F
𝝉𝑨
S
𝜎
Eduardo Nobre Lages – CTEC/UFAL
•
Critérios de Resistência
Critério de Mohr-Coulomb:
Postula que, para materiais dúcteis, o mecanismo de falha
ocorre pelo deslizamento atômico em planos de maior tensão
de cisalhamento, quando essa ultrapassa o valor da tensão
limite de cisalhamento, que aumenta com a tensão normal de
compressão nesse plano.
𝜏
F
S
𝒄𝑨
𝝓𝑨
𝜎
Eduardo Nobre Lages – CTEC/UFAL
•
Estado Plano de Tensão
Matemática
Gráfica
y
σ yy
σ xx
z
x
σ yx
σ xy
σ xx
σ xx
[σ ] = σ yx
0
σ xy
σ yy
0
0
0
0
Particularizam-se as expressões gerais anteriores para estado
plano de tensão
tensão, característico, por exemplo, de problemas de
chapas finas com carregamentos no plano da chapa.
Assume-se ainda que as tensões não nulas estão
relacionadas às direções x e y.
Eduardo Nobre Lages – CTEC/UFAL
σ yy
Estado Plano de Tensão
σ yy
r
t
σ yx
σ xy
σ xx
y
x
σ xx
n̂
θ
σ xy
σ yx
Analisam-se apenas planos virtuais de corte que são paralelos
à direção z, que podem ser caracterizados por um único
parâmetro (inclinação do versor normal com a direção x).
cos θ
n̂ = sin θ
0
Eduardo Nobre Lages – CTEC/UFAL
σ yy
Vetor de Tensão em Estado
Plano de Tensão
σ yy
r
t
σ yx
σ xy
σ xx
y
x
σ xx
n̂
θ
σ xy
σ yx
Vetor de tensão:
σ xx
{t} = [σ]T {n} = σ yx
0
σ xy
σ yy
0
0
0
0
T
cos θ σ xx cos θ + σ yx sin θ
=
σ
cos
θ
+
σ
sin
θ
sin
θ
yy
xy
0
0
Só componentes no plano xy
Eduardo Nobre Lages – CTEC/UFAL
σ yy
Tensões Normal e Cisalhante
em Estado Plano de Tensão
r
t
σ yy
σ yx
σ xy
σ xx
x
σ xx
τ
θ
σ xy
n̂
σ yx
σ yy
Tensão normal:
σ = {t} {n} = {n} [σ ]{n} = σ xx cos 2 θ + σ yy sin 2 θ + σ xy sin 2θ
T
T
Tensão cisalhante:
τ = {t} {m} =
T
σ yy − σ xx
2
sin 2θ + σ xy cos 2θ
Versor no plano de corte
− sin θ
{m} = cos θ
0
Eduardo Nobre Lages – CTEC/UFAL
y
σ
Círculo de Mohr em Estado
Plano de Tensão
σ = σ xx cos 2 θ + σ yy sin 2 θ + σ xy sin 2θ
2
sin 2θ + σ xy cos 2θ
As equações de σ e τ definem parametricamente
uma circunferência para um sistema de
coordenadas retangulares com σ de abscissa e τ
de ordenada, para um valor dado de θ.
Eduardo Nobre Lages – CTEC/UFAL
τ=
σ yy − σ xx
Círculo de Mohr em Estado
Plano de Tensão
τ
σ xy
σ med =
σ yy
σ med
σ
σ xx
− σ xy
σ xx + σ yy
2
σ xx − σ yy
+ σ 2xy
e R =
2
2
Eduardo Nobre Lages – CTEC/UFAL
σ = σ xx cos 2 θ + σ yy sin 2 θ + σ xy sin 2θ
σ yy − σ xx
τ=
sin 2θ + σ xy cos 2θ
2
(σ, τ)
2θ
R
Tensões e Direções Principais
em Estado Plano de Tensão
σ med =
A
2
σ xx − σ yy
+ σ 2xy
R =
2
2
Os pontos A e B são os que se apresentam livres da
tensão de cisalhamento. Portanto, as tensões normais
nesses planos são as denominadas tensões principais,
dadas por
σ1 = σ med + R e σ 2 = σ med − R
que também são os valores extremos da tensão normal.
Eduardo Nobre Lages – CTEC/UFAL
B
σ xx + σ yy
Tensões e Direções Principais
em Estado Plano de Tensão
σ med =
σ xx + σ yy
2
σ xx − σ yy
+ σ 2xy
R =
2
2
A
B
σ 2 = σ med − R
Ainda em relação aos pontos A (σ1,0) e B (σ2,0), como a
tensão cisalhante é nula, pode-se determinar as orientações
dos planos principais de tensão
τ=0 ∴
σ yy − σ xx
2
sin 2θp + σ xy cos 2θ p = 0
tan2θ p =
2σ xy
σ xx − σ yy
Eduardo Nobre Lages – CTEC/UFAL
σ1 = σ med + R
Tensões e Direções Principais
em Estado Plano de Tensão
σ2
σ yy
θ2
σ yx
σ xy
σ xx
x
σ xy
σ xx
θ1
σ1
σ yx
σ yy
σ2
Os ângulos θ1 e θ2 são definidos a partir de
2σ xy
1
θ p = arctan
2
σ xx − σ yy
Considerando só ângulos positivos como solução,
o menor dos ângulos é θ1 quando σxy for positivo.
Eduardo Nobre Lages – CTEC/UFAL
y
σ1
Tensões Extremas de Cisalhamento
em Estado Plano de Tensão
D
A
τ min = − R e
τ max = R
com inclinações de 45º e 135º,
respectivamente, em relação ao
eixo principal 1, medidas no sentido
anti-horário.
C
σ2
σ1
135º
σ med
σ med
45º
R
σ1
R
σ2
σ med
σ med
Eduardo Nobre Lages – CTEC/UFAL
B
Os pontos C e D estão
associados a planos de
valores extremos da tensão
de cisalhamento, dados por
Estado Plano de Tensão
Generalizado
Matemática
Gráfica
y
yy
xx
z
zz
yx
x
xy
zz
xx
xx
yx
0
xy
yy
0
0
0
zz
Em estado plano de tensão generalizado a direção z também é
principal, só que associada a uma tensão principal não nula (zz).
Assim sendo, o estudo anterior, de busca das tensões
e direções principais para planos virtuais de corte com
versores normais no plano xy, também pode ser
repetido neste caso.
Eduardo Nobre Lages – CTEC/UFAL
yy