02/04/2014
Aula 02: Revisão de
Probabilidade e Estatística
Prof. Leonardo Menezes
Tópicos em Telecomunicações
Sumário
•
•
•
•
•
•
•
O que é estatística
O que é probabilidade
Variáveis aleatórias
Distribuição de Probabilidade
Momentos
Aplicações
Mapeamentos
O que é estatística
• Estatística é o estudo de dados
– Coleta
– Organização
– Análise
– Interpretação
– Apresentação
• O que significa isso?
– Estatística tenta fazer estabelecer parâmetros a
partir dos dados que são coletados
1
02/04/2014
O que é estatística
• Coleta
– Como devo coletar os dados
– Quantas amostras são necessárias
– Que informação eu posso extrair desta coleta
– Qual é o erro que tenho ao assumir que a
informação extraída é a informação verdadeira.
O que é estatística
• Exemplo 1: Na 2ª Guerra Mundial os aliados
precisavam determinar o número de tanques
dos alemães. Ao capturar tanques alemães
eles encontraram um número de série em
cada um deles
– A partir destes números, eles estimaram quantos
tanques alemães tinham sido produzidos.
O que é estatística
• Pergunta: Quantos tanques alemães foram
produzidos em dado ano?
• Neste caso:
– A coleta e a quantidade de amostras foi
especificada externamente
• O que falta:
– A informação que posso extrair desses dados
– O erro que tenho ao assumir que a informação
extraída é a informação verdadeira
2
02/04/2014
O que é estatística?
• Dados:
– 10 tanques foram capturados
– Números de série dos tanques capturados:
• 239, 23, 251, 219, 91, 154, 436, 408, 500, 123.
• Depois vamos voltar a este problema.
O que é estatística
• Exemplo 2: Queremos saber a preferência de
forma de deslocamento para UnB. As opções
são:
– Somente de carro
– Outros
• Pergunta: Quantas pessoas usam somente
carro para vir a UnB?
• Depois voltamos a este problema...
O que é probabilidade
• Probabilidade é o estudo de fenômenos
aleatórios
– Usa informações do conjunto de total dados para
obter estimativas para amostras (muito
importante em estatística)
– É a fundação matemática da estatística:
• Somente com probabilidade é que conseguimos
responder as perguntas formuladas nos dois exemplos.
3
02/04/2014
O que é probabilidade
• Então se queremos diferenciar probabilidade
de estatística:
– Probabilidade usa informações do conjunto
completo de dados para estimar informações em
amostras
– Estatística usa informações de amostras para
estimar informações do conjunto completo de
dados.
• Na realidade, precisamos das duas na análise
de dados.
O que é probabilidade
• A probabilidade está mais ligada a chance. Mas
com este parâmetro permite estimar outros
• Exemplo 3: Moeda honesta (cara ou coroa). Qual
é a chance de obter 3 caras e 3 coroas em 6
jogadas da moeda?
• Exemplo 4: Moeda desonesta (60% cara e 40%
coroa). Qual é a chance de obter 3 caras e 2
coroas em 5 jogadas da moeda?
• Depois voltamos a estes problemas
O que é probabilidade
• Para definirmos a estatística de um experimento
(ou teste), precisamos definir antes o conjunto de
todos os resultados possíveis deste experimento.
– Este conjunto é chamado de espaço amostral {A}
– Qualquer subconjunto de {A} é chamado de evento
• A probabilidade de ocorrência do evento {B} ( que
é um subconjunto de eventos aleatórios
pertencente a A) é um número real que
representa a chance de ocorrência de A1
4
02/04/2014
O que é probabilidade
• No caso de uma coleção de eventos:
B A1 A2 ... Ak
• Temos que, se os mesmos forem disjuntos
Ai Aj {}
• Então
P B P A j
j
O que é probabilidade
• Com estas informações podemos começar a
entender probabilidade a partir de um caso
mais próximo a nossa realidade: uma moeda.
– Espaço amostral de A : Cara {X1} e Coroa {X2}
– Cara e Coroa são eventos disjuntos e compõem
todo o espaço amostral {X}
• Portanto:
X X1 X 2
P X P X 1 X 2 P X 1 P X 2 1
O que é probabilidade
• Voltemos ao Exemplo 3: Moeda honesta (cara
ou coroa). Qual é a chance de obter 3 caras e
3 coroas em 6 jogadas da moeda?
– Como a moeda é honesta, então a chance de
obter cara é igual a de obter coroa, logo:
P(cara) p P(coroa) q
p q 1
pq
1
pq
2
5
02/04/2014
O que é probabilidade
• O próximo passo é listar todas as chances de
acontecimento
• Como jogar as moeda não afeta as
probabilidades (elas não se alteram a cada
jogada), então 6 jogadas equivalem a:
p q p q p q p q p q p q 1
p q 6 1
p 6 6 p 5 q 15 p 4 q 2 20 p 3q 3 15 p 2 q 4 6 pq 5 q 6 1
1
1 6 15 20 15 6 1 1
64
O que é probabilidade
• Portanto a chance de obter 3 caras e 3 coroas em
6 jogadas da moeda é
20 p 3q 3
20
0.3125
64
• Com base neste resultado podemos encontrar a
resposta ao exemplo 4: Moeda desonesta (60%
cara e 40% coroa). Qual é a chance de obter 3
caras e 2 coroas em 5 jogadas da moeda?
O que é probabilidade
• Neste caso, como a moeda é não honesta,
então as chances são fornecidas:
P(cara) p
6
10
P(coroa) q
• Listando as possibilidades
4
10
p q p q p q p q p q 1
p q 5 1
p 5 5 p 4 q 10 p 3 q 2 10 p 2 q 3 5 pq 4 q 5 1
1
243 162 216 144 48 32 1
625
6
02/04/2014
O que é probabilidade
• Portanto a chance de obter 3 caras e 2 coroas
em 5 jogadas da moeda é
10 p 3q 2
216
0.3456
625
• Note que a chave é encontrar as
probabilidades adequadamente
representadas
Variáveis Aleatórias
• Mas ao invés de simplesmente nomear
eventos (Cara ou Coroa), podemos associar
números a estes eventos
• Por exemplo:
– Cara = 1 & Coroa = 0 (ou vice-versa)
• Ao fazermos isto, estamos associando
variáveis aleatórias a eventos.
– Isto ampliará em muito a representação de
chance.
Variáveis Aleatórias
• Assim como podemos associar um número ao
evento (x) também podemos representar a
probabilidade, no caso de Cara {x=1} ou Coroa
{x=0} como:
P(cara) P X 1 p
P(coroa) P X 0 q
P X p q 1
7
02/04/2014
Variáveis Aleatórias
• As variáveis aleatórias podem ser contínuas
(também descontínuas) ou discretas
– As discretas assumem valores bem definidos
PY y1
P y1
– As contínuas tem sua probabilidade definida por
intervalos
PY y
Variáveis Aleatórias
• No caso das variáveis aleatórias (VA)
contínuas, há um mapeamento entre os
números reais e as variáveis de modo que:
– Se
– Então
y1 y2
PY y1 PY y2
• Este mesmo raciocínio é aplicado para VA
discreta
Distribuição de Probabilidade
• Desta forma podemos definir a função de
distribuição de probabilidade acumulada F(x)
(tanto para VA contínua quanto discreta):
F x P X x
x1 x2 F x1 F x2
lim x F x 0
lim x F x 1
8
02/04/2014
Distribuição de Probabilidade
• Apesar do conceito de probabilidade poder
ser usado tanto para o caso de VA contínua
quanto discreta
– É mais simples entender probabilidade através de
VA discreta
• A probabilidade de um evento X1 ocorrer em
n tentativas é
p X 1 lim n
nX 1
n
Distribuição de Probabilidade
• Isto quer dizer que a probabilidade é dada
pela razão do número de vezes que ocorreu
X1 sobre o número total de tentativas
– Esta abordagem é chamada de frequentista (em
oposição a abordagem bayesiana).
• No caso contínuo podemos definir a função
densidade de probabilidade como
p x
dF x
dx
Distribuição de Probabilidade
• Há várias densidades de probabilidades
conhecidas. No caso de uma variável aleatória
temos as mais conhecidas:
– Normal (ou Gaussiana)
– Uniforme
p x
1
px b a
0
1
e
2
x 2
2
a xb
c.c
9
02/04/2014
Distribuição de Probabilidade
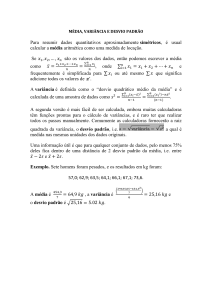
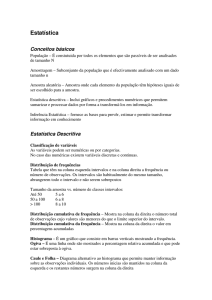
• Distribuição Normal
Distribuição de Probabilidade
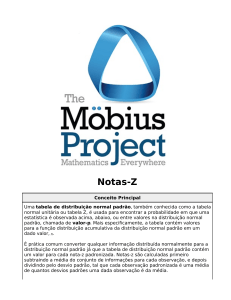
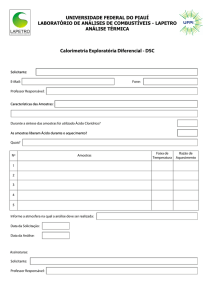
• Distribuição Uniforme (contínua)
Distribuição de Probabilidade
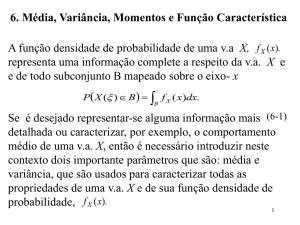
• Distribuição Uniforme (discreta)
10
02/04/2014
Distribuição de Probabilidade
• Através das distribuições de probabilidade
estimar regiões de maior probabilidade
– Basicamente este é o conceito dos intervalos de
confiança
– Isto é mais fácil de entender na distribuição de
probabilidade uniforme contínua
– A Função distribuição é
F x
xa
ba
Distribuição de Probabilidade
• Note que podemos calcular a probabilidade
do ponto estar em determinado intervalo (por
exemplo de x1 a x2)
x2 x1
Px 2 Px1
ba
ba
x x
2
ba
x1
x x
2
x2
Distribuição de Probabilidade
• Centrando em torno da média e fazendo
pontos equidistantes da média podemos
encontrar os intervalos de confiança
P x P x
2x
ba
P x P x
x
ba
2
• Podemos também definir em função do desvio
padrão
12
P x P x
x
2
x 3P x P x
11
02/04/2014
Momentos
• A partir do conhecimento da definição,
podemos encontrar os momentos da
distribuição
– Podem ser “puros” (não centrados) ou “centrais”
(centrados)
E x
E xk
k
– Os momentos centrais são medidos com relação a
média .
Momentos
• Os momentos tem algumas propriedades
úteis:
Ea a
Eax by aEx bEy
E x y E x 2 E y 2 2 Exy
2
Momentos
• O momento de ordem k é dado por
– No caso discreto temos variáveis discretas
N
nxi
i 1
n
E x k lim n
N
N
i 1
i 1
xik pxi xik pi xik
– No caso contínuo temos variáveis contínuas
Ex k x k px dx
12
02/04/2014
Momentos
• O momento de ordem zero é sempre 1
N
N
i 1
i 1
E x 0 pxi xi0 pxi 1
Ex 0 x 0 px dx px dx 1
Momentos
• O primeiro momento é a média da
distribuição (mesma equação da média
ponderada)
N
N
i 1
i 1
E x1 pxi xi1 pxi xi
Ex1 x1 px dx xpx dx
Momentos
• Os momentos seguintes são definidos em
termos dos momentos centrais
• Temos
2
– Variância – ordem 2
Ex
Ex
E x varx
3
– Skewness (distorção) – ordem 3
– Kurtosis (curtose) – ordem 4
4
13
02/04/2014
Momentos
• Variância:
Momentos
• Skewness:
Momentos
• Kurtosis:
14
02/04/2014
Momentos
• A relação da variância com os momentos
puros:
E x E x 2 2x 2
2
E x E2x E 2
2
E x 2 2Ex 2 E x 2 2
varx Ex 2 Ex
2
Momentos
• A variância da soma de duas variáveis
aleatórias
2
varx y E x x y y
E x y 2x y
E x E y 2 Ex y
2
2
x
y
x
2
y
2
x
y
varx vary 2 covxy
x
y
Momentos
• Naturalmente, se
covxy 0
• Ou seja a covariância entre as variáveis é nula.
Então
varx y varx vary
• Se a covariância é nula, estas variáveis são ditas
não correlacionadas
15
02/04/2014
Momentos
• Se duas variáveis são não correlacionadas então
px, y px p y
• Exemplo 5. Um divisor de tensão entre dois
resistores, tem que um deles é uma VA de
distribuição uniforme entre 1 e 2 W. O outro,
aonde a tensão é medida também é uma VA de
distribuição uniforme entre 1 e 2 W. As duas VAs
não tem correlação. Qual é a média e o desvio
padrão da tensão?
• Voltaremos a este exemplo depois
Momentos
• Mas o que significa variância?
– Usando a analogia de circuitos
• Consideremos a janela de tempo de 0 a T como uma
distribuição uniforme
1
pt T 0
0
0t T
c.c
• A nossa “variável aleatória” será a tensão nos terminais
de um resistor R
Momentos
• Portanto
T
1
Evt vt dt VDC
T
0
V2
1
v 2 t 1
Ept vt it dt
dt RMS
T
R T
R
0
0
T
T
2
E v 2 t VRMS
16
02/04/2014
Momentos
• Portanto
– O primeiro momento puro equivale o “valor DC”
Evt VDC
– O segundo momento “puro” é equivalente ao
quadrado do valor RMS.
2
E v 2 t VRMS
Momentos
• Com isso podemos pensar no segundo
momento central como
– A energia do sinal “fora” do valor médio (DC), ou
seja, uma forma de dispersão do sinal.
• Se o segundo momento for zero a energia está toda
concentrada na média
• A medida que o momento aumenta, mais energia
estará espalhada ao redor da média
– A raiz quadrada da variância é chamada de desvio
padrão
2
2
2
E vt VDC E vt Evt
V
2
RMS
V
2
DC
Wmédio WDC
Momentos
• Primeiros momentos das distribuições
contínuas apresentadas
– Normal
Ex
E x 2
2
– Uniforme
Ex
ba
2
2
b a 2
b a
2
E x
12
2
17
02/04/2014
Momentos
• Ligando a probabilidade e a estatística
– Vamos considerar que foram retirados N amostras
de uma distribuição com média e desvio .
– Esta distribuição pode ter uma densidade de
probabilidade a priori desconhecida.
• Agora temos dados ao invés de ligações
matemáticas abstratas.
– Como podemos saber quais os momentos da
distribuição das amostras?
Momentos
• Sabemos que
Ex
E x 2
2
• O que temos é:
X1, X 2 ,..., X N
• Estes foram obtidos aleatoriamente!
Momentos
• Vamos considerar a soma de todos os dados
amostrados
N
sN X 1 X 2 ... X N X k
k 1
• Se repetirmos a amostragem infinitas vezes, o
valor esperado desta soma é
N
N
N
Es N E X k EX k N
k 1
k 1 k 1
18
02/04/2014
Momentos
• Como: N Es
N
1
• Definindo a média amostral X
N
X
N
k 1
k
• Então a expectativa da média amostral é:
1 N
1 N
EX E X k E X k
N k 1 N k 1
1
1
Es N N
N
N
Momentos
• Pergunta: De que isso adianta? Afinal teremos
que repetir infinitas vezes...
– Não é o caso, pois podemos provar que a
diferença entre a média amostral e converge
para zero com aumento do número de amostras...
– Basta provar que a variância da diferença da
média amostral e tende a zero quando o
número de amostras tende ao infinito
• Vamos encontrar a variância da diferença (que
é a variância da média amostral)
Momentos
• O segundo momento central é:
1 N
1
N
varX var X k 2 var X k
N k 1 N
k 1
1 N
1
2
varX k N 2 N 2 N
N 2 k 1
• Portanto a variância diminui linearmente com o
aumento do número de amostras
– Note que para que isto seja verdade a covariância
entre as amostras tem de ser zero
covxy 0
19
02/04/2014
Momentos
• Alternativamente:
E X E X 2 2 X 2 E X 2 2
2
1 N
1 N
E X k 2 2 E X k2 2
N k 1
N k 1
2
1 N
N
2
2 E X k E X k 2
N k 1
k 1
2
1
2
N 2 N 2 2 2
2
N
N
Momentos
• Temos então um estimador do primeiro
momento da distribuição (média)
X
1
N
N
X
k 1
k
lim N X
• E o segundo momento (variância)?
Momentos
• Vamos calcular o estimador da variância da
amostra considerando a média .
S2
1
N
N
X
k 1
2
k
1
N
X
N
k 1
X X
2
k
1 N
2
2
X k X 2X k X X X
N k 1
20
02/04/2014
Momentos
• Calculando o valor esperado
1 N
2
2
E S 2 2 E X k X 2X k X X X
N k 1
2 N
1 N
1 N
2
2
E X k X X k X X X
N k 1
N k 1
N k 1
1 N
2 N
1
2
E X k X E X k X X E
N k 1
N k 1
N
1 N
2
2
E X k X 0
N k 1
N
X
N
2
k 1
Momentos
• Rearranjando
1 N
2
2
E X k X 0
N k 1
N
N
2
2
E X k X N 1 N 1E S 2
k 1
2
• Portanto, há um desvio no estimador que
pode ser corrigido fazendo
N
1
2
E s2 E
X k X 2
N 1 k 1
N
1
2
s2
X
X
k
N 1
k 1
Aplicações
• Muito bem, mas e como vamos aplicar isso?
• Voltamos ao problema do tanque (exemplo 1):
– 10 tanques foram capturados
– Números de série dos tanques capturados:
• 239, 23, 251, 219, 91, 154, 436, 408, 500, 123.
• A distribuição em questão é uniforme (os
números vão de 1 até M)
– Sabemos quanto é a média de uma distribuição
uniforme e a variância
21
02/04/2014
Aplicações
• Média
M 1
M 2 1
2
• Variância
2
M 12 M
12
12 2 1
Aplicações
• Para calcular a média e a variância usamos os
estimadores das amostras
N
1 N
X k X 2
N 1 k 1
k 1
• Além disto temos a relação entre o desvio da
média amostral e real
X
1
N
X
s2
k
E X
2
2
N
M 12
12 N
Aplicações
• Resultados:
– Média da amostra: 244.4
– Variância da amostra: 25998.3
– Desvio padrão da amostra: 158.1
• Resultados do espaço amostral original
–
–
–
–
Média: 250.5
Variância: 20750.1
Desvio padrão: 144.1
Variância da média da amostra em relação a média
real: 2075.0
– Desvio padrão: 45.6
22
02/04/2014
Aplicações
• Resultados:
– Estimador pela média: 487.8000
– Estimador pela variância: 547.7045
– Média dos dois: 517.7523
– Considerando distribuição uniforme:
M 244.4 158.1 3
518
– Valor real de M: 500
Aplicações
• Voltemos ao exemplo 2: Quantas pessoas
usam somente carro para vir a UnB?
• Vamos dizer que você entrevistou N pessoas
aleatoriamente e descorrelacionadas e
obteve as proporções p e q
– M pessoas vinham de carro (p)
– N-M pessoas não vinham de carro (q)
– O que podemos dizer a respeito do seu resultado?
Aplicações
• Primeiro associamos VA a cada probabilidade
– 1 para p & 0 para q
p
M
N
q
N M
N
– M amostras escolheram p e N-M escolheram q
• Então usando a relação da média amostral:
1 N
1
M
X X k M 1 N M 0
p
N k 1
N
N
23
02/04/2014
Aplicações
• Então usando a relação da variância da
amostra:
s2
1 N
1
2
2
2
X k X N 1 M 1 p N M 0 p
N 1 k 1
M 2Mp Np 2
N M
M
2
p p2
N 1
N 1 N
N
N
N
N
2
2
p 2p p
p1 p
pq
N 1
N 1
N 1
Aplicações
• Pelas relações de variância da média sabemos
que:
E X
2
2
N
pq
N 1
• Portanto, a proporção de pessoas que vem de
carro para UnB é aproximadamente
p' p
p1 p
N 1
Aplicações
• Só para fazer uma idéia: digamos que foram
entrevistadas 101 pessoas e que a proporção
p foi de 30%
– Temos então
p' 0.30 0.05
24
02/04/2014
Mapeamentos
• Em muitas aplicações em engenharia temos uma
combinação de entradas (ou estímulos)
aleatórios com determinísticos
• Por exemplo:
– Variações na fabricação de componentes
– Incertezas com relação a posicionamento
– Incertezas devido a variáveis muito complexas
• Nestes casos, temos uma relação (equação ou
procedimento determinístico) associado a efeitos
aleatórios
Mapeamentos
• Nestas situações temos um mapeamento
definido de entradas aleatórias (combinadas
com determinísticas)
– Desejamos saber qual é a estatística da saída
• Frequentemente média e desvio padrão
• Por vezes intervalos de confiança ou mesmo a
distribuição de probabilidade (ou sua densidade) do
resultado
– A técnica mais comum é Monte Carlo
Mapeamentos
• Como funciona Monte-Carlo?
– Temos o mapeamento definido
– Geramos uma quantidade de pontos aleatórios
suficiente para nossa finalidade
– Submetemos cada um desses pontos ao
mapeamento
– Investigamos a estatística da saída
• Média, desvio, distribuição, etc...
25
02/04/2014
Mapeamentos
• Exemplo: mapeamento f(x)
– Geramos os pontos aleatórios (a distribuição tem
de ser conhecida)
X 1 , X 2 ,... X k ,... X N
– Submetemos ao mapeamento e obtemos a
estatística da saída
f X
1
N
N
f X
k
k 1
s
2
f
1 N
f X k f X 2
N 1 k 1
Mapeamentos
• Em casos aonde o problema possa ser
definido de forma analítica, calculamos os
momentos da saída
E f x f x px dx
k
k
Mapeamentos
• Exemplo 6. Um divisor de tensão entre dois
resistores, tem que um deles é uma VA de
distribuição uniforme entre 1 e 2 W. O outro,
aonde a tensão é medida é um resistor de 1
W. Qual é a média e o desvio padrão da
tensão?
V
1
V0
1 x
26
02/04/2014
Mapeamentos
• Usando a definição
1
3
dx ln 0.4054651084V0
1
x
2
1
2
V EV V0
2
1
3
ln dx
1
x
2
1
2
2 V0
3 1
2
2 ln 2 ln ln 3 0.002264712V02
2 6
Mapeamentos
• O desvio padrão é a raiz da variância, logo
0.04758899032V0
• Podemos que dizer (com o erro de 1 desvio)
V 0.4054651084 0.0475889903V0
• Note que o valor considerando tudo
determinístico é 0.4V0
Mapeamentos
• Vamos calcular este resultado por Monte
Carlo
– Para simplificar fazemos V0=1
• Calculamos a tensão em N amostras aleatórias do valor
da resistência (distribuição uniforme entre 1 e 2)
• Resultados
V 0.4046 0.0558V0
V 0.4056 0.0445V0
V 0.4038 0.0483V0
V 0.4054651084 0.0475889903V0
– N=10
– N=100
– N=1000
27
02/04/2014
Mapeamentos
• Código MATLAB – Monte Carlo para o Problema
•
•
•
•
•
•
•
•
•
•
•
•
•
•
% Teste para Monte Carlo
clear
% Número de amostras
N=100000;
% Amostras de resistencia
R=1+rand(1,N);
% Calculo da tensão
V=1./(1+R);
% Média da tensão
Vm=mean(V);
% Desvio da tensão
Vd=sqrt(var(V));
% Escreve a média e o desvio
[Vm Vd]
Mapeamentos
• Note que a convergência não é monotônica
– Monte Carlo tem convergência lenta
• Para N=1.000.000
V 0.4053 0.0475V0
V 0.4054651084 0.0475889903V0
• Este é o maior problema de Monte Carlo –
demanda muitas amostras
Mapeamentos
• E se fizermos pela UT?
– De novo para simplificar fazemos V0=1
• Calculamos a tensão em 3 amostras do valor da
resistência (distribuição uniforme entre 1 e 2)
– R=1.1125, R=1.5, R=1.8875
– w1=0.278, w2=0.444, w3=0.278
• Resultados
V 0.4055 0.0476V0
V 0.4054651084 0.0475889903V0
28
02/04/2014
Mapeamentos
• Código MATLAB – UT para o Problema
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
% Teste para UT
clear
% Pontos sigma
sg=[-0.775 0 0.775]';
% Pesos
w=[0.278 0.444 0.278];
% Valores de Resistência
R1=1+1/2*(1+sg);
% Valores de Tensão
V1=1./(1+R1);
% Média
Vm=w*V1;
% Variancia
Va=w*((V1-Vm).^2);
% Desvio
Vd=sqrt(Va);
[Vm Vd]
Mapeamentos
• Finalmente, voltemos ao exemplo 5. Um
divisor de tensão entre dois resistores, tem
que um deles é uma VA de distribuição
uniforme entre 1 e 2 W. O outro, aonde a
tensão é medida também é uma VA de
distribuição uniforme entre 1 e 2 W. As duas
VAs não tem correlação. Qual é a média e o
desvio padrão da tensão?
y
V
yx
V0
Mapeamentos
• Usando a definição
2 2
V EV V0
1 1
y
1
dxdy 0.5V0
yx
2
2
y
1
dxdy
y x 2
1 1
2 2
2 V0
3
9 ln 2 5 ln 3 0.004736820V02
4
29
02/04/2014
Mapeamentos
• O desvio padrão é a raiz da variância, logo
0.06882455957V0
• Podemos que dizer
V 0.5 0.06882455957V0
• Note que o valor considerando tudo
determinístico é 0.5V0
Mapeamentos
• E com relação a distribuição?
– Caso contínuo: Utiliza-se o jacobiano do
mapeamento y=g(u) da função densidade de
probabilidade p(u)
dg 1 y
dg 1 y
pT y p g 1 y
p g 1 y
dg
dy
– A função distribuição de probabilidade
dgdww dw
F y pT wdw p g 1 w
y
y
1
Mapeamentos
• No caso de mapeamentos polinomiais este
cálculo é menos complicado
– A inversa do polinômio pode ser calculada (mas
nem sempre é simples)
– Mapeamento
y g u a2u 2 a1u a0
– Função densidade de probabilidade
pu
u2
1 2
e
2
30
02/04/2014
Mapeamentos
• Portanto
a a 2 4a y 4a a
1
2
2 0
1
2a2
1
u g y
2
a1 a1 4a2 y 4a2 a0
2a2
1
d g 1 y d g 1 y a12 4a2 y 4a2 a0
1
dg
dy
a12 4a2 y 4a2 a0
Mapeamentos
• Portanto, a nova função densidade de
probabilidade
2
1 1 a1 a12 4a2a0 4a2 y
1 1 a1 a1 4 a2 a0 4 a2 y
a2
22
a2
22
1 e
e
p y
2
2
2 a1 4a2 a0 4a2 y
a1 4a2 a0 4a2 y
2
• Para a0=a1=0:
2
y
e 2 a2
p y
2a2 y
Conclusão
• Apresentados os conceitos básicos de
estatística e probabilidade
• Revisados os conceitos de momentos
• Revisados os conceitos de distribuição de
probabilidade e densidade de probabilidade
• Apresentado o conceito de mapeamento
31