ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
EDITAL No 01/2016.1
COMPETIÇÃO DE ROBÓTICA
1. Da Apresentação
A Competição de Robótica será um evento realizado durante o Workshop da Escola de Engenharias e Ciências Exatas
da Universidade Potiguar. Este evento consiste em uma competição integrada na qual os participantes deverão
construir cada parte de um robô, até que, este, possa realizar algumas tarefas específicas. As tarefas serão organizadas
por nível de dificuldade e estarão compreendidas em duas principais áreas: Movimentação de um Veículo aéreo não
tripulado e a movimentação de um braço robótico.
2. Dos Objetivos
2.1. Integrar os conhecimentos de circuitos eletrônicos, sistemas de controle, sistemas de comunicação, desenvolvimento de programação para sistemas embarcados e dispositivos móveis e cálculos.
2.2. Estimular a construção de robôs manipuladores (bracços robóticos com mais de 2 graus de liberdade) e móveis
(veículos aéreos não tripulados).
2.3. Despertar o público da UnP para competições regionais, nacionais e internacionais na área da robótica e
desenvolver competências para participações.
2.4. Promover trocas de experiências inovadoras entre estudantes e professores.
3. Do Local da Competição
3.1. A competição será realizada no campus nascimento de castro (UnP).
4. Das Inscrições
Período: 04/04/2016 - 29/04/2016
Local: UnP Nascimento de Castro (Coordenação)
Horário: Das 8:00 às 22:00
5. Da Participação
A competição é destinada aos alunos regularmente matriculados nos cursos da coordenação de Automação e TI da
Universidade Potiguar.
6. Das Equipes
• O limite máximo de inscritos é de 5 equipes para cada competição;
• Equipes com 1 participante poderão se inscrever apenas nas etapas da competição de circuito e manipuladores
robóticos (Anexo II);
• Equipes com ao menos 2 até 4 participantes poderão participar da etapa de montagem do circuito (escolhendo
um único participante para a montagem) e da etapa do Quadricóptero (Anexo III);
1
ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
7. Da Etapa Classificatória
O participante, no ato da inscrição, deverá apresentar um protótipo com as características solicitadas, bem como o
layout do circuito e do protótipo. A partir disso, uma comissão julgadora, indicada pelos coordenadores do evento,
avaliará as inscrições e selecionará os candidados mais aptos em ordem crescente. Os critérios serão, funcionamento do
protótipo segundo as características do Anexo I, quantidade de jumpers na placa (quanto menor melhor), organização
do circuito, modularidade (ser capaz de facilmente acoplar circuitos auxiliares), algoritmos implementados.
8. Da Realização
Data:19/05/2016
Local: Laboratório de Eletrônica
Duração da Competição: 6h
Horário:14:00 - 20:00
9. Das Atividades
9.1. Competição de Montagem do Circuito de Controle
Esta etapa da competição é comum aos dois projetos e consistirá na etapa inicial. Aqui, o objetivo principal é
construir uma placa de circuito como indicado no Anexo I.
9.2. Competição de Montagem do braço robótico
Nesta competição o(s) participante(s) deverá(ão) se inscrever para as etapas de seguidor de referência com ou sem
modelagem cinemática e dinâmica conforme o Anexo II. Em resumo, a atividade será movimentar remotamente
o manipulador robótico para acertar um alvo.
9.3. Competição de Montagem do VANT
Nesta competição os participantes deverão construir um quadricóptero que se movimente para uma posição que
permita estourar algumas bolas de encher posicionadas estrategicamente (Ver Anexo III).
Obs: Não serão aceitos protótipos montados com "Kits prontos"(Arduino, Lego, etc.). Todo o projeto de circuito e
construção, exceto para componentes básicos, devem ser construídos pelo(s) prticipante(s).
10. Da Comissão Julgadora
Comissão Julgadora será composta por 3 (três) professores dos cursos de Automação e TI de que acompanharão a
competição.
11. Dos Critérios de Avaliação
11.1. Competição de Montagem do Circuito de Controle
Os critérios são definidos no Anexo I.
11.2. Competição de Montagem do braço robótico
Os critérios são definidos no Anexo II.
11.3. Competição de Montagem do VANT
Os critérios são definidos no Anexo III.
12. Da Premiação
Os 3 (três) primeiros colocados serão premiados com medalha, certificado de honra e horas complementares.
13. Da Certificação
Todos os participantes da competição, devidamente classificados, receberão certificado de participação.
2
ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
14. Disposições Gerais
Os casos omissos serão avaliados pela comissão julgadora.
3
ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
Anexo I: Regras para a Montagem dos Circuitos de Acionamento e Controle
1. Das características físicas e Construção do Circuito:
O circuito deve ser construído de maneira a possuir as seguintes características:
1.1. O layout do circuito deverá ser impresso em papel fotográfico;
1.2. O método de adesão da tinta (do papel) na placa deve ser térmico;
1.3. O limite máximo de dimensionamento deve ser 60mmx90mm;
1.4. Ser capaz de realizar comunicações serial, i2c, wifi;
1.5. A alimentação do circuito deve ser realizada ou via USB ou KRE de 3 vias;
1.6. Ser programado via USB;
1.7. Ser capaz de acionar cargas externas utilizando PWM (4 saídas);
1.8. Ser capaz de receber um comando via WIFI (via mobile ou pc).
2. Dos Materiais e ferramentas Fornecidos na Etapa de Montagem:
O participante terá a sua disposição os seguintes materiais e ferramentas para auxiliar a montagem do circuito (o
participante não precisará trazer esse material).
• Ferramentas: Sugador de solda, Ferro de solda, Estanho, Percloreto de Ferro, Alicate de corte, Alicate de bico,
Suporte para placa de circuito, Estilete, Sabão neutro, Cortador de placa, Multímetro, Verniz, Pasta de solda,
Alcool Isopropílico, Furador de placa (Mecânico);
• Componentes: 2 Capacitores Cerâmicos de 22pf (22), 2 Capacitores Cerâmicos de 100nf (104), 1 Capacitor
Eletrolítico de 2.2µF X 50V, 3 Resistores de 1kΩ, 1 Resistor de 270Ω, 1 Diodo 1N4728, 1 LED Vermelho 5mm, 1
Cristal Oscilador de 20MHz, 1 Push Button de 2 terminais, 1 Regulador de Tensão LM 1117T, 1 Soquete 28 pinos,
1 Conector Borne KRE 3 vias, 1 Barra de pinos fêmea 1x2, 1 Barra de pinos fêmea 1x3, 1 Barra de pinos fêmea
1x4, 3 Barra de pinos fêmea 1x8, 1 Barra de pinos fêmea 2x4, 1 Placa de Fenolite 10cmx10cm, Jumpers simples, 1
Conector USB- fêmea tipo B, Cabo USB Tipo B (Impressora).
O participante deverá dispor do seguinte material para realizar a competição (de outra maneira será desclassificado):
• Ferramentas: Ferro de passar, Bombril, Pincel, Furador de placa Elétrico (Opcional);
• Componentes: 1 Microcontrolador, 1 Módulo Wifi, Esquema Impresso em papel fotográfico (customizado da
maneira desejada);
3. Do Processo de Montagem (Competição):
3.1. A montagem do circuito deve ser realizada 100% durante a competição (Exceto para o módulo wifi);
3.2. O tempo máximo para a montagem do circuito será de 3 (três) horas;
3.3. O processo deverá seguir a sequência: Limpar a placa de fenolite, Imprimir o desenho do circuito na placa,
Preparar a placa para colocar no percloreto, Corroer a Placa, Preparar a placa para solda, Soldar, Gravar o
programa de testes;
3.4. O programa de testes deve ser implementado pelo participante e deve testar as seguintes funcionalidades: PWM,
WIFI, I2C, Serial e ADC.
4
ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
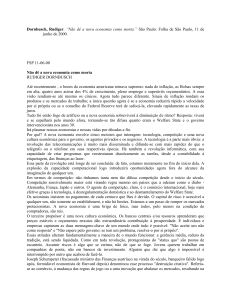
4. Dos critérios de Avaliação:
A pontuação seguirá a descrição da tabela:
Atividade
Limite de Tempo
Limpar a placa
Imprimir o desenho
Preparar a placa para Percloreto
Corroer a Placa
Preparar a placa para solda
Soldar
Gravar o programa de testes
Testar Serial
Testar WIFI
Testar I2C
Testar PWM
Total
3 min
15min
5min
10min
5min
25min
2min
1min
1min
1min
1min
1h e 4min
Pontuação
dentro do limite de tempo
5
10
5
10
5
20
5
10
10
10
10
100 pts
Pontuação
fora do limite de tempo
3
6
3
6
3
14
3
6
6
6
6
62pts
Obs 1: Qualquer participante poderá solicitar informações, notificando o(s) juiz(es).
Obs 2: O(s) juiz(es) têm o poder de tomar quaisquer ações julgadas pertinentes durante a competição, inclusive
desclassificar.
Obs 3: Esta competição deverá ser realizada de forma independente das outras. Isto é, caso não seja possível cumprir
esta etapa, o participante deverá possuir um protótipo pronto para participar da segunda etapa da competição
(Funcionamento do braço robótico).
Obs 4: Todas as regras estão sujeitas a alterações até o dia da competição.
5
ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
Anexo II: Regras para a Competição de Braços Manipuladores
A competição de Robôs estará dividida em 2 níveis de dificuldade, o primeiro movimentação simples e o segundo,
utilizando conceitos de cinemática direta e inversa e controle de processos.
1. Regras gerais para as duas competições:
1.1. O participante deverá estar de posse do circuito controlador pronto;
1.2. O robô deve ser acionado via wifi (Ver requisitos do Anexo I);
1.3. O robô deve ser montado durante o workshop e isso será um quesito na avaliação;
1.4. O robô deve ter ao menos 2 graus de liberdade e deve ser um manipulador robótico;
1.5. O robô deve possuir uma garra;
1.6. O volume do robô não deverá superar 1m3 ;
1.7. O robô, comandado via wifi, deverá realizar a seguinte atividade: Posicionar-se de forma apropriada, "pegar"uma
agulha, e movimentar-se de maneira a acertar um alvo;
1.8. O participante realizará 3 tentativas, com todas contabilizando pontuação;
1.9. A movimentação do braço para acertar o alvo deverá acontecer em no máximo 3 minutos;
1.10. A montagem do manipulador deverá ocorrer em menos de 50 min.
2. Regras para a Competição em Nível Básico:
2.1. Os motores utilizados devem ser servo;
2.2. O comando de movimento deve ser enviado via wifi através de um dispositivo móvel (seja por acelerômetro,
valores escritos ou botões em tela);
2.3. O circuito deve interpretar o comando, enviando um valor de pwm proporcional para os servo motores;
2.4. Quanto mais próximo do alvo for acertado, maior a pontuação.
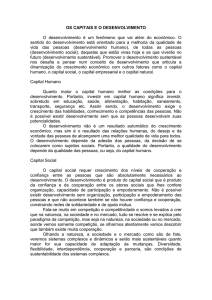
3. Dos Critérios de Avaliação da Competição em Nível Básico:
A pontuação seguirá a descrição da tabela:
Atividade
Limite de Tempo
Montagem
Movimentação do braço
Acerto do alvo
Total
50 min
3 min
3 min
56 min
Pontuação
dentro do limite de tempo
20
20
20 menos Distância do Centro em mm
100 pts
Pontuação
fora do limite de tempo
15
Desclassificado
Desclassificado
15 pts
4. Regras para a Competição em Nível Avançado:
4.1. Os motores utilizados devem ser de passo, cc ou servo(com a função de controlador desabilitada);
4.2. No programa remoto(celular ou desktop) devem estar implementadas as modelagens cinemáticas (direta e
inversa), o algoritmo de geração de trajetória.
4.3. No circuito, deve estar implementado o programa de controle PID ou em espaço de estados.
6
ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
4.4. A movimentação do braço deverá ocorrer seguindo o seguinte procedimento: O participante deverá informar a
posição que deseja posicionar, o algortimo gerará a trajetória dos motores(após calcular o valor final dos ângulos
de cada motor), os valores da trajetória deverão ser enviados via wifi para o circuito, o circuito deverá garantir
que a posição final será atingida utilizando um dos controladores citados e os valores atuais de posicionamento
do braço deverão ser visualizados no aplicativo.
5. Dos Critérios de Avaliação da Competição em Nível Avançado:
A pontuação seguirá a descrição da tabela:
Atividade
Limite de Tempo
Montagem
Movimentação do braço
Acerto do alvo
Total
50 min
3 min
3 min
56 min
Pontuação
dentro do limite de tempo
20
20
20 menos Distância do Centro em mm
100 pts
Pontuação
fora do limite de tempo
15
Desclassificado
Desclassificado
15 pts
Para este nível, também haverá uma tabela de penalidades:
Atividade
Ausência de Algoritmo de Cinemática direta
Ausência de Algoritmo de Cinemática Inversa
Ausência de Algoritmo de Geração de Trajetória
Ausência de Algoritmo de Controle
Problemas de Sintonia de Controlador
Problemas no Posicionamento do Manipulador
Problemas no Recebimento das Variáveis de Junta
Penalidade
Desclassificado
Desclassificado
Desclassificado
Desclassificado
10pts
10pts
10pts
Obs 1: Qualquer participante poderá solicitar informações, notificando o(s) juiz(es).
Obs 2: O(s) juiz(es) têm o poder de tomar quaisquer ações julgadas pertinentes durante a competição, inclusive
desclassificar.
Obs 3: Esta competição deverá ser realizada de forma independente das outras. Isto é, caso não seja possível cumprir
esta etapa, o participante deverá possuir um protótipo pronto para participar da segunda etapa da competição
(Funcionamento do braço robótico).
Obs 4: Todas as regras estão sujeitas a alterações até o dia da competição.
7
ESCOLA DE ENGENHARIAS E CIÊNCIAS EXATAS
COORDENAÇÃO DAS ÁREAS DE AUTOMAÇÃO E TI
COMPETIÇÃO DE ROBÓTICA
Anexo III: Regras para a Competição de V.A.N.T.s
Na competição de Veículos Aéreos Não Tripulados (V.A.N.T) serão realizados testes em nível básico.
1. Regras gerais para a competição de V.A.N.T.s:
1.1. O participante deverá estar de posse do circuito controlador pronto (Ver requisitos do Anexo I);
1.2. O V.A.N.T. deve ser acionado via wifi (Ver requisitos do Anexo I);
1.3. O V.A.N.T. deve ser montado durante o workshop e isso será um quesito na avaliação;
1.4. A montagem do V.A.N.T. deverá ocorrer em menos de 50 min.
1.5. A interface do aplicativo deverá possuir as informações dos sensores e do PWM enviado para os motores, na
forma de gráficos. O circuito deve receber informações de sensores de posição e orientação via I2C e enviá-los,
juntamente com os valores de PWM (que controlam a velocidade) para um aplicativo via wifi, utilizando TCP;
1.6. O volume do V.A.N.T. não deverá superar 1m3 ;
1.7. O V.A.N.T. deverá ser comandado remotamente para, seguro em peças de elástico, se movimentar para estourar 4
bolas de encher;
1.8. A movimentação para acertar os alvos deverá acontecer em no máximo 15 minutos;
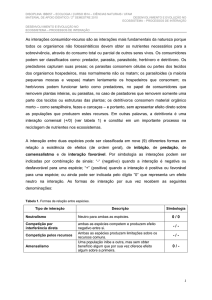
2. Dos Critérios de Avaliação:
A pontuação seguirá a descrição da tabela:
Atividade
Limite de Tempo
Montagem
Acerto dos Alvos
Estabilidade
Quantidade de Variáveis Monitoradas
Total
50 min
15 min
65 min
Pontuação
dentro do limite de tempo
20
10 p/ Alvo
10
3 p/variável
100 pts
Pontuação
fora do limite de tempo
15
Desclassificado
10
3 p/variável
100 pts
Obs 1: Qualquer participante poderá solicitar informações, notificando o(s) juiz(es).
Obs 2: O(s) juiz(es) têm o poder de tomar quaisquer ações julgadas pertinentes durante a competição, inclusive
desclassificar.
Obs 3: Esta competição deverá ser realizada de forma independente das outras. Isto é, caso não seja possível cumprir
esta etapa, o participante deverá possuir um protótipo pronto para participar da segunda etapa da competição
(Funcionamento do braço robótico).
Obs 4: Todas as regras estão sujeitas a alterações até o dia da competição.
8