Controle Direto de Potência do Gerador de
Relutância Variável aplicado à Geração Eólica
Tárcio A. S. Barros, A. J. Sguarezi Filho and E. Ruppert
Resumo—Este trabalho propõe um controle direto de potência
para geradores de relutância variável aplicado à geração eólica
conectada com sistema elétrico. O controle processa o erro de
potência diretamente e altera o valor do ângulo de desligamento
das chaves do conversor para garantir que a potência gerada
seja igual à referência de potência. São apresentados resultados
de simulação para validar a operação do controle.
Palavras chave- Gerador de Relutância Variável, Energia
Eólica, Controle Direto de Potência.
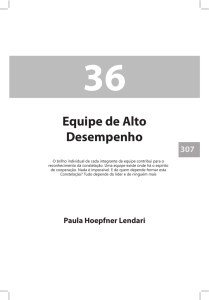
no controle de dois conversores separadamente. O conversor
conectado ao GRV regula a extração da máxima potência
elétrica de acordo com o perfil eólico do sistema. O segundo
conversor é um conversor fonte de tensão que está conectado à
rede elétrica e regula a tensão do elo de corrente contínua (Vdc )
possibilitando que a energia gerada pelo GRV seja enviada ao
sistema elétrico.
I. I NTRODUÇÃO
A crescente demanda de energia por parte dos países
desenvolvidos e em desenvolvimento, a busca por alternativas
energéticas ao uso dos combustíveis fósseis e a atenção dada
às questões ambientais tornam importante o estudo de soluções
de geração com o emprego de fontes alternativas e renováveis
de energia elétrica [1].
Uma das principais formas de energias renováveis é a
energia eólica que é a energia cinética contida nas massas
de ar em movimento. Seu aproveitamento ocorre por meio da
conversão da energia cinética de translação em energia cinética
de rotação, com o emprego de turbinas eólicas para a produção
de eletricidade [1], [2].
Nos sistemas de geração eólica as máquinas elétricas amplamente empregadas como gerador são as de indução e as
síncronas [3]. Estes geradores podem operar com velocidade
variável ou fixa em função da utilização ou não de conversores
eletrônicos de potência, respectivamente, para o processamento da energia elétrica deste geradores. Uma máquina alternativa que pode ser utilizada em sistemas de geração eólica
em microrredes ou sistemas isolados com cargas relativamente
baixas é a máquina de relutância variável [2], [4].
O Gerador de Relutância Variável (GRV) apresenta como
principais características : robustez mecânica, alto torque de
partida, alta eficiência e baixo custo [5], [6]. O GRV pode
operar em velocidades variáveis e sua faixa de operação é
mais ampla do que a dos geradores de indução e síncrono [5],
[7]. Alguns trabalhos que estudam o comportamento do GRV
em situações de velocidade variável são apresentados em [5],
[8], [9].
Um diagrama esquemático de uma possibilidade de sistema
de geração eólico conectada à rede elétrica utilizando o GRV
é mostrado na Figura 1. O sistema de geração é baseado
Este trabalho foi financiado pela FAPESP e CAPES.
Tárcio A. S. Barros e E. Ruppert - Universidade Estadual de Campinas - UNICAMP, Brazil. E-mails: [email protected] and [email protected]
A. J. Sguarezi Filho Universidade Federal do ABC - UFABC, Brazil. Emails: [email protected]
Figura 1. Estrutura de conversores em cascata para geração eólica utilizando
o GRV.
Neste trabalho é apresentado um sistema de controle direto
de potência (CDP) para o GRV conectado à rede elétrica.
Diferentemente dos esquemas de controles do GRV encontrados na literatura na qual a potência do GRV é controlada
indiretamente por meio de uma malha de corrente, o controle
proposto atua diretamente sobre a potência gerada pelo GRV.
O controle direto de potência é uma técnica bastante utilizada
no controle de potências do estator do gerador de indução
de rotor bobinado. O CDP é baseada nos princípios do
controle direto de torque e surgiu como uma alternativa para o
controladores de potências que empregam malhas de corrente
do rotor [10], [11] . Inicialmente, o controle direto de potência
foi aplicado em retificadores trifásicos com chaves controladas
com emprego de técnicas pulse width modulation PWM [12].
II. M ÁQUINA DE R ELUTÂNCIA VARIÁVEL MRV
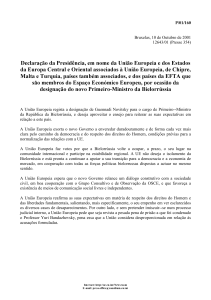
A MRV, Figura 2, possui bobinas de campo nas ranhuras
e não possui bobinas ou imãs no seu rotor. O rotor é composto por material ferromagnético com saliências regulares.
A ausência de enrolamentos e imãs permanentes no rotor do
MRV proporciona a esta uma série de vantagens [6]: a) baixo
custo de fabricação e de materiais, chegando a ser 60 % do
custo de produção de maquinas CC e CA equivalentes [13];
b) facilidade de manutenção e reparo devido aos enrolamentos
se concentrarem no estator; c) ausência de condutores no rotor
que ao mesmo tempo provoca uma redução da inercia.
O princípio de funcionamento do MRV baseia-se na variação da relutância do circuito magnético do rotor. A Figura 2
mostra uma MRV 8/6 (número de pólos do estator /número
de pólos do rotor). O enrolamento A-A’ é uma das fases da
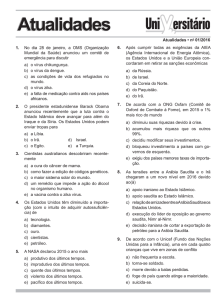
máquina. Na Figura 3 observa-se o perfil da indutância do enrolamento da MRV. Se a saturação magnética for desprezada,
então a indutância variará linearmente durante o alinhamento
entre os pólos do rotor e do estator [8]. A indutância será
máxima quando o rotor e o estator estiverem completamente
alinhados, e mínima quando os pólos estiverem completamente
desalinhados. A operação como motor é obtida quando a
fase é excitada durante crescimento da indutância. Para a
operação como gerador, a máquina deve ser excitada durante o
decrescimento da indutância. Assim, a mesma máquina pode
ser usada como motor ou como gerador mediante a alteração
do ângulo de disparo das chaves do seu conversor.
Bobina
Estator
D’
B
C
Popt = kopt wr3
(2)
onde kopt depende da aerodinâmica da hélice, da caixa de
engrenagens e dos parâmetros da turbina eólica.
A
Rotor
potência mecânica, gerada por uma turbina eólica é de acordo
com a sua velocidade de operação [14]. Traçando curvas de
potência para diferentes velocidades do vento Figura 4 notase que, para cada valor de velocidade do vento existe uma
região, na qual a velocidade do rotor maximiza a potência
mecânica gerada. Portanto, para velocidades do vento, abaixo
da velocidade nominal, a operação com velocidade variável do
rotor aumenta a eficiência na geração de energia. O perfil de
otimização da eficiência da potência gerada para velocidades
variáveis pode ser expressado por:
C’
D
B’
A’
Figura 2.
Vista frontal do motor a relutância chaveado 8/6 .
Figura 4.
Comparação entre a potência mecânica para operação com
velocidade fixa e variável. [14].
IV. S ISTEMAS DE C ONTROLE DE P OTÊNCIA DO GRV
Figura 3. Perfil da indutância da MRV,janela de condução das chaves e
corrente para uma fase da MRV operando como gerador.
III. M ODELAGEM SISTEMA EÓLICO
A potência mecânica produzida por uma turbina eólica é
dado por [14]:
1
.A.Cp .ρ.V 3 (λ, β)
(1)
2
onde Pm é a potência mecânica(W), A é a área varrida pelas
hélices da turbina (m2 ), ρ é a densidade do ar, V é a velocidade
do vento, Cp (λ, β) é o coeficiente de potência, λ é a relação
r
linear de velocidade( Rw
V ), β é ângulo de passo das hélices da
turbina(graus), wr é a velocidade angular da turbina (rad/s), e
R é o raio das hélices.
Na Equação (1) , verifica-se que a potência mecânica (P m),
gerada pela força do vento, depende diretamente do coeficiente
de potência (Cp). Por sua vez, considerando o ângulo de passo
das hélices fixo na posição zero, o coeficiente de potência
depende, exclusivamente, da relação entre a velocidade do
vento e a velocidade linear da ponta da hélice (λ), portanto a
Pm =
Na literatura foram encontrados artigos que abordam a
conexão do GRV com a rede elétrica em sistemas de geração
eólica com velocidade variável. Em [9] os autores utilizaram
duas estratégias de controle de potência de saída para um GRV
8/6 : ângulo de condução fixo com controle PWM e ângulo
de acionamento variável. Os experimentos mostraram uma
alta eficiência do sistema para uma ampla faixa de variação
de velocidade. Entretanto, o controle utilizando PWM em
situações de ampla faixa de velocidades é contestado em [15]
por sua complexidade de hardware e pelo baixo rendimento
em variações de velocidade. O conversor para acionar o GRV
utilizado por [9] utiliza um conversor buck para magnetizar
as fases da máquina, aumentando a complexidade do sistema
proposto.
Em [5] foi desenvolvido um sistema de controle da potência gerada pelo GRV utilizando um controle por histerese.
Observou-se um resultado satisfatório apenas para baixas velocidades de operação, e a proposta de controle não foi validada
experimentalmente . Em [16] foi proposto um sistema de
controle no qual a potência enviada para a rede é controlada
diretamente pelo inversor conectado à rede. Observa-se que
esta forma de controle possui resposta lenta e baixo desempenho para situações de grandes variações de velocidade.
Uma alternativa que é analisada em trabalhos existentes
na literatura está relacionada ao desenvolvimento de controladores para conectar o GRV diretamente com a carga
elétrica por meio do conversor do GRV. Em [17], [18]
foram realizados controles utilizando um controlador fuzzy
para manter constante a potência gerada por um GRV 6/4,
acionado por um conversor HB modificado, e observou-se
que o controle manteve a potência desejada para uma dada
faixa de velocidades, porém a eficiência do sistema diminuiu
bruscamente com a queda de velocidade. Outros controles
utilizando otimização do ângulo de chaveamento do GRV
foram realizados em [19], [20], porém requerem alto poder
de processamento e armazenamento de tabelas.
V. P ROPOSTA DE SISTEMA DE CONTROLE DIRETO DE
POTÊNCIA GERADA PELO GRV
Os esquemas de controles do GRV supracitados atuam no
controle da potência indiretamente por meio de uma malha
de corrente e através de modulação PWM, o controle aqui
proposto atua diretamente sobre a potência gerada pelo GRV.
Foi utilizado um controlador PI, que processa o erro entre
a referência de potência e a potência gerada, para controlar
a ângulo de magnetização das fases do GRV. O sistema de
controle direto de potência proposto neste trabalho consiste
basicamente no conversor responsável por acionar o GRV, o
conversor para conectar o GRV à rede elétrica e o controle
direto de potência do GRV.
Pref = kopt wr3 onde Pref é a potência demandada na saída do
GRV. O controle consiste em manter o ângulo de acionamento
das chaves do conversor HB em um valor fixo θon e, a partir
do processamento do erro entre Pref e a potência gerada atual
P , controlar o ângulo de desligamento das chaves do conversor
θof f . Este controle é baseado no princípio de quanto maior for
a etapa de excitação do GRV maior será a potência gerada. O
ângulo θof f é obtido por meio do processamento do erro de
potência (eP ) por um controlador Proporcional Integral (PI)
conforme (4). A expressão para o erro de potência é dada
por:
eP = Pref − P
(3)
O ângulo θof f é determinado por:
θof f = Kp eP + Ki
Z
eP dt
(4)
Onde Kp é o ganho proporcional e Ki é o ganho integral do
controlador PI.
A. Conversor responsável por acionar o GRV
Existem diversos conversores de potência para o acionamento do GRV, porém a configuração mais utilizada é o
conversor meia ponte assimétrica ou HB (Half Bridge) que está
apresentado na Figura 5. Para operação do GRV, este conversor
funciona em duas etapas básicas: excitação e geração. A etapa
de excitação é realizada quando as duas chaves de cada fase
do GRV são acionadas fazendo com que a fase seja submetida
à tensão de excitação Vdc , que provoca a passagem de uma
corrente crescente através da bobina desta fase. Na geração, as
duas chaves da fase são desligadas e a corrente passa a circular
pelos diodos até a carga. A cada período de excitação a tensão
do barramento Vdc transfere energia para o campo magnético
da fase correspondente. Quando as chaves são abertas (período
de geração) essa energia flui para a carga ou para a rede
elétrica em conjunto com a parcela resultante da conversão
da energia mecânica em elétrica [6].
Fase D
Fase C
Vdc
Fase B
C
Fase A
+
Figura 5.
Conversor HB.
B. Controle direto de potência do GRV
O sistema de controle do GRV deve regular a potência
gerada no ponto de máxima eficiência aerodinâmica, ou seja,
Figura 6.
Diagrama de controle direto de potência do GRV.
C. Conversor responsável por conexão com a rede elétrica
O conversor fonte de tensão (Figura 7) é responsável por
regular a tensão Vdc próxima do valor de referência e enviar
a potência gerada pelo GRV para a rede elétrica. A estratégia
de controle aplicada ao conversor fonte de tensão consiste
basicamente de duas malhas de controle. Como pode ser
observado na Figura 8, existe uma malha interna de controle
cujo objetivo é controlar a corrente enviada para a rede
elétrica, e externamente há uma malha de controle da tensão
do barramento(Controle Vdc ) . A malha de corrente(Controle
isd , isq ) é responsável por controlar o fator de potência da
potência enviada para a rede elétrica, dessa maneira uma
boa resposta dinâmica é uma propriedade importante para
este controle de corrente [21]. O controle da tensão do elo
de corrente contínua é responsável por balancear o fluxo de
potência, neste caso enviar a potência gerada pelo GRV para
a rede [22].
O controle da tensão do elo de corrente continua do inversor
fonte de tensão é realizado no sistema de coordenadas síncrono
(dq) obtido utilizando a transformação abc para dq (9) sobre
as correntes e as tensões da rede elétrica com o emprego da
posição espacial do vetor espacial da tensão da rede. Esta
transformação torna contínuos os valores das variáveis de
controle, desta forma a filtragem e o controle da corrente são
facilitados [23]. O ângulo da tensão da rede elétrica (θ = wt)
isd
isq
Figura 7.
vmoda
vmodb
vmodc
Conversor fonte de tensão.
utilizado na transformação abc para dq é o obtido utilizando
um sistema phase-locked loop (PLL). O controle de (Vdc )
,realizado por um controlador PI, o qual provém o valor de
referência i∗sd (5), enquanto que o valor de i∗sq é obtido a partir
do fator de potência F P desejado e da P̂ref (6). Os valores de
referência de corrente i∗sd e i∗sq são comparados com os valores
obtidos da rede elétrica (isd e isq ) e são processados por dois
controladores PI que geram o valor do vetor espacial tensão
da rede elétrica ~vmoddq (7) e (8) no sistema de coordenadas
síncrono. Este vetor espacial é transformado para o sistema
de coordenadas abc (10) gerando os sinais de tensão vmodabc
que então são gerados utilizando a modulação PWM senoidal.
=
2
3
cosθ
−senθ
1
− 21
= 1
−
2
− 12
senθ
cosθ
1
0
0
1
cosθ
−
√2
3
senθ
2
√
1
−
√2
3
2
−√21
− 23
−senθ
cosθ
ia
ib
ic
(9)
vmodd
vmodq
− 3
2
(10)
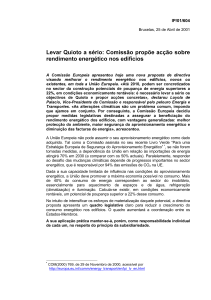
VI. R ESULTADOS DA S IMULAÇÃO
O sistema de controle de potência proposto para o GRV
conectado à rede elétrica foi simulado com a utilização do
aplicativo Simulink do software Matlab. Simulou-se um perfil
de potência (Figura 9) a ser gerado pelo GRV com velocidade
variável de operação (Figura 11) e observou-se que a referência de potência ativa foi atendida pelo sistema de controle
direto de potência proposto. Na Figura10 observa-se o perfil
para o fator de potência da energia enviada para a rede elétrica.
7000
Pref
P Controle PI[W]
6000
Potência[W]
5000
4000
3000
2000
1000
0
0.5
1
1.5
2
2.5
Tempo[s]
Figura 9.
Figura 8. Diagrama de blocos do controle vetorial do conversor conectado
à rede elétrica.
Potência gerada pelo GRV e a referência de potência.
1
0.8
∗
i∗sd = Kpi (Vdc
− Vdc ) + Kii
i∗sq
−3
P̂ref
=
2
Z
∗
(Vdc
− Vdc )dt
√
1 − FP2
FP2
(5)
Fator de potência
0.6
FP
FP*
0.4
0.2
0
−0.2
−0.4
−0.6
(6)
−0.8
−1
0.5
1
1.5
2
2.5
Tempo[s]
vsd = Kps (i∗sd − isd ) + Kis
Z
(i∗sd − isd )dt
(7)
vsq = Kps (i∗sq − isq ) + Kis
Z
(i∗sq − isq )dt
(8)
Figura 10.
Fator de potência da energia enviada para a rede elétrica.
A Figura 12 mostra as correntes das fases do GRV, na qual
é possível observar a variação das amplitudes das correntes
1800
320
Tensão Vdc [V]*
Tensão Vdc [V]
1700
310
1600
300
Tensão Vdc[V]
Velocidade[rpm]
Velocidade[rpm]
1500
1400
1300
290
280
270
1200
260
1100
250
1000
0.5
1
1.5
2
240
0.8
2.5
1
1.2
1.4
Tempo[s]
Velocidade de operação do GRV.
1.8
2
2.2
2.4
Tensão Vdc controlada pelo VSC.
Figura 13.
, fato que é justificado devido à uma alteração no ângulo
θof f . Conforme pode ser observado na Figura 6, para evitar
que as correntes nas fases do GRV ultrapassem o valor
máximo(Imax ), foi utilizado um limitador de corrente que
desliga as fases caso as correntes ultrapassem Imax . A tensão
nas fases foi regulada para ser de 280 V e este deve ser o valor
da tensão do elo de corrente contínua que será controlada pelo
VSC.
Tensão Fase A[pu]
Corrente Fase A[pu]
1
0.5
Valores[pu]
Figura 11.
1.6
Tempo[s]
0
−0.5
−1
35
Corrente fase A GRV[A]
Corrente fase B GRV[A]
Corrente fase C GRV[A]
Corrente fase D GRV[A]
Correntes do GRV[A]
30
0.32
0.33
0.34
0.35
0.36
0.37
0.38
0.39
Tempo[s]
25
Tensão e corrente da fase a da rede na conexão do VSC com a
Figura 14.
rede.
20
15
FFT window: Phase a Current
0.5
10
0
-0.5
5
3
0
0.99
0.995
1
1.005
1.01
1.015
As Figuras 13 e 14 apresentam a tensão Vdc e a tensão e
a corrente da fase a durante a operação do GRV e possibilitam observar o desempenho do controle realizado sobre o
conversor conectado à rede. Na Figura 13 observa-se que
a tensão Vdc foi controlada pois a referência foi atendida.
A Figura 14 observa-se a tensão e a corrente da fase da
rede elétrica. A THD(Total Harmonic Distortion) da corrente
enviada para a rede elétrica analisada pela FFT(Fast Fourier
Transform)(Figura 15) foi de 1.57%.
VII. C ONCLUSÕES
Neste artigo foi apresentado uma proposta de controle
direto de potência para um gerador de relutância variável. Os
resultados da simulação confirmam a eficácia do controlador
de potência durante condições de funcionamento do gerador
em velocidade variável e com diferentes valores de referência
3.03
3.04
3.05
Time (s)
3.06
3.07
3.08
3.09
100
Mag (% of Fundamental)
Correntes das fases do GRV.
3.02
Fundamental (60Hz) = 0.7313 , THD= 1.57%
1.02
Tempo[s]
Figura 12.
3.01
80
60
40
20
0
Figura 15.
0
50
100
150
Frequency (Hz)
200
250
300
THD e componentes harmônicas da corrente da fase a.
de potência ativa e de fator de potência. Assim, a estratégia
de controle direto de potência é uma ferramenta interessante
para controle da potência do gerador de relutância variável
alimentados em turbinas eólicas.
R EFERÊNCIAS
[1] M. G. Simões and F. A. Farret, Renewable Energy Systems with
Induction Generators. CRC PRESS, 2004.
[2] Y.-C. Chang and C.-M. Liaw, “Establisment of a switched reluctance
generator-based common dc microgrid system,” IEEE transactions on
power electronics, pp. 2512–2526, September. 2011.
[3] Y. He, J. Hu, and Z. Rend, “Modelling and control of wind-turbine
used dfig under network fault condition,” Proceedings of the Eighth
International Conf. on Electrical Machines and Systems, vol. 2, pp. 096–
991, September. 2008.
[4] D. Torrey, “Switched reluctance generators and their control,” Industrial
Electronics, IEEE Transactions on, vol. 49, no. 1, pp. 3 –14, feb 2002.
[5] M. D., L. Xu, and T. Littler, “Modelling and control of a variable-speed
switched reluctance generator based wind turbine,” Universities Power
Engineering Conference, pp. 459 – 463, June 2007.
[6] R. Krishnan, Switched Reluctance Motor Drives,Modeling, Simulation,
Analysis, Design, and Applications. CRC PRESS, 2001.
[7] X. Zhang, G. Tan, S. Kuai, and Q. Wang, “Position sensorless control of
switched reluctance generator for wind energy conversion,” in Power and
Energy Engineering Conference (APPEEC), 2010 Asia-Pacific, march
2010, pp. 1 –5.
[8] K. Ogawa, N. Yamamura, and M. Ishda, “Study for small size wind
power generating system using switched reluctance generator,” IEEE
International Conference on Industrial Technology, pp. 1510–1515,
2006.
[9] R. Cardenas, R. Pena, M. Perez, J. C. G. Asher, and P. Wheeler,
“Control of a switched reluctance generator for variable-speed wind
energy applications,” IEEE Transactions on energy conversrion, vol. 20,
no. 4, pp. 691 –703, December 2005.
[10] I. Takahashi and T. Noguchi, “A new quick-response and high-efficiency
control strategy of an induction motor,” IEEE Trans. Ind. Applications,
vol. IA-22, no. 5, pp. 820–827, September-october 1986.
[11] M. Depenbrock, “Direct self-control(dsc) of inverter-fed induction machine,” IEEE Trans. Power Electronics, vol. 3, no. 4, pp. 420–429,
october 1988.
[12] T. Noguchi, H. Tomiki, S. Kondo, and I. Takahashi, “Direct power
control of pwm converter without power-source voltage sensors,” IEEE
Transactions on Industrial Applications, vol. 3, no. 2, p. 473Ű479,
October 1998.
[13] J. L. Domingos, “Projeto, construção e proposta de acionamento de um
motor linear a relutância chaveado,” Faculdade de Engenharia Elétrica,
UFU, Universidade Federal de Uberlândia, Tese, Abril 2003.
[14] M. B. and C. SALLES, “Modelagem e análises de geradores eólicos de
velocidade variável conectados em sistemas de energia elétrica,” Escola
Politécnica da Universidade de São Paulo, Tese Doutorado, 2009.
[15] T. SAWATA, The switched reluctance generator, Electronic Control of
Switched Reluctance Machines. Newness Power Engineering Series,
2001.
[16] S. Azongha, S. Balathandayuthapani, C. Edrington, and J. Leonard,
“Grid integration studies of a switched reluctance generator for future hardware-in-the-loop experiments,” Universities Power Engineering
Conference, pp. 459 – 463, June 2010.
[17] H. Chen, “Implementation of a three-phase switched reluctance generator system for wind power application,” IEEE International Conference
on Industrial Technology, no. 8, pp. 1 –6, June 2008.
[18] B. ShaD and A. Emadi, “A digital control for switched reluctance
generators,” IEEE International Conference Mechatronics, no. 4, pp.
182 –187, April 2000.
[19] Y. Sozer and D. A. Torrey, “Closed loop control of excitation parameters
for high speed switched-reluctance generators,” IEEE International
Conference on Industrial Technology, no. 4, pp. 1 –6, June 2000.
[20] I. Kioskeridis and C. Mademlis, “Optimal efficiency control of switched
reluctance generators,” IEEE Transactions on power electronics, vol. 21,
no. 4, pp. 1062–1071, April 2006.
[21] M. Kazmierkowski and L. Malesani, “Current control techniques for
three-phase voltage-source pwm converters: a survey,” Industrial Electronics, IEEE Transactions on Industrial Electronics, vol. 45, no. 5, pp.
691 –703, October 1998.
[22] M. L. A. V. T. Frede Blaabjerg, Remus Teodorescu, “Overview of control
and grid synchonization for distributed power generation systems,” IEEE
Transactions on industrial electronics, vol. 53, no. 5, pp. 691 –703,
October 2008.
[23] M. Kazmierkowski, R. Krishnan, and F. Blabjerg, Control in Power
electronics- Selected Problems. New Yourk Academic, 2002.
APPENDIX
Parâmetros do Gerador de Relutância Variavél: Pn =
Ns
= 68 ; Rs = 0.253
7.5kW ; Vn = 280V ; wn = 1500rpm; N
r
Ω; Lmax = 145.9 mH; Lmin = 9.15 mH; J = 0.08 Kg ·m2 .
Ganhos dos Controladores: Kp = 0.002, Ki = 0.0291;
Kpi = 0.01, Kii = 3; Kps = 0.05, Kps = 2;
Tárcio A.S Barros Nasceu na cidade de Petrolina-PE, Brasil, em 1987.
Recebeu o título de Bacharel em Engenharia Elétrica pela Universidade
Federal do Vale do São Francisco (UNIVASF) em Petrolina PE, Brasil, em
2010. Atualmente é aluno de Mestrado em Engenharia Elétrica, na área de acionamento elétricos, da Universidade Estadual de Campinas (UNICAMP). Seus
interesses de pesquisa são acionamentos eletrônicos de máquinas elétricas de
relutância variável, indução, e gerador de indução duplamente alimentado.
Alfeu J. Sguarezi Filho Nasceu em Cuiabá-MT em 1981, recebeu seus graus
de bacharel em Engenharia Elétrica pela Faculdade Área 1, Mestre e Doutor
pela Universidade Estadual de Campinas no Brasil, respectivamente em 2005,
2007 e 2010. Atualmente, é professor da Universidade Federal do ABC. Seus
interesses de pesquisa são acionamentos eletrônicos de máquinas elétricas
de indução, sistemas elétricos de potência e gerador de indução duplamente
alimentado.
Ernesto Ruppert Filho Nasceu em Jundiaí/SP em 1948, recebeu seu diploma
de bacharel em Engenharia Elétrica e graus de Mestre e Doutor pela Universidade Estadual de Campinas, no Brasil, respectivamente em 1971, 1974 e
1983. De 1972 a 1978, ele trabalhou na Escola de Engenharia Elétrica e de
Computação da Universidade de Campinas como professor Assistente na área
de Conversão Eletromecânica de Energia, de 1979 a 1983, ele trabalhou para
a General Electric no Brasil na concepção de motores síncronos e de indução
trabalhando como Engenheiro de Aplicação em grandes motores e geradores,
de 1983 a 1989, ele trabalhou para Vigesa Equipamentos Pesados. De 1989
a 1992, geriu sua própria empresa e trabalhou com instalações elétricas e de
1992 até agora, ele está trabalhando como Professor Titular da Universidade de
Campinas, em Campinas, Brasil, em pesquisa e ensino nas áreas de Máquinas
Elétricas, Eletrônica de Potência, Acionamentos e sistemas de energia elétrica