Horário T2: 3a feira 10:00-12:00 & 5a feira 8:00-10:00
Horário T8: 3a feira 8:00-11:00 & 5a feira 10:00-12:00
II UNIDADE
“comment ouser parler des lois du hazard?
L'hazard n'est-il pas l'antithèse de toute loi?”.
J. Bertrand
Hélio Magalhães de Oliveira, docteur, ENST, Paris
DE-CCEN
Website do curso
http://www2.ee.ufpe.br/codec/introducao_a_estatistica.html
Variáveis Aleatórias Multidimensionais
Muitas vezes estamos interessados “conjuntamente” na descrição
probabilística
de
mais
de
uma
característica
numérica
de
um
experimento aleatório.
Definição: Seja (Ω, A, P) um espaço de probabilidades. Uma função
X
:Ω →
n
Boreliano de
é chamada de um vetor aleatório se para todo evento B
n
,
X
−1
(B) ∈ A.
Dado um vetor aleatório
X
P X no espaço mensurável (
definimos P X (A) =P( X
−1
, pode-se definir uma probabilidade induzida
n
,Bn) da seguinte maneira: para todo A∈Bn,
(A)).
FUNÇÃO DE DISTRIBUIÇÃO CONJUNTA
Definição: A função de distribuição acumulada conjunta de um vetor
aleatório
X
, representada por F X ou simplesmente por F, é definida por
F X ( X ) = P(C X ) = P(X1≤x1, X2≤x2, ... , Xn ≤ xn), ∀ X ∈
n
.
CASO DISCRETO
(a) Se
X
for um vetor aleatório discreto, ou seja assumir um número
enumerável de valores { x1 , x 2 , ..., }, podemos definir uma função de
probabilidade de massa conjunta, p tal que
• p( x i ) ≥ 0.
•
p ( x ) 1.
i
i 1
VETORES ALEATÓRIOS
O conceito de variável aleatória pode ser estendido para
mapeamento no espaço euclidiano
X:
n-dimensional.
n
exemplo: mapeamento em
3
.
Um vetor aleatório é um mapeamento vetorial tal que:
1) x
, o conjunto no espaço amostral X:={w | X x }
n
corresponde a um evento.
O vetor de
x :=(x1,x2,x3,...,xn) e
X x (X1(w) x1, X2(w) x2, X3(w) x3,…, Xn(w) xn)
2) P(X1(w) x1, X2(w) x2, …,Xi(w)=-,…, Xn(w) xn)=0 (i)
FUNÇÃO DISTRIBUIÇÃO DE UM VETOR ALEATÓRIO
A função distribuição de um vetor aleatório é descrita por
FX:
n
x FX( x ).
Lembrete: o resultado é sempre um número real.
FX( x )=P(X x )=P(X1(w) x1, X2(w) x2, X3(w) x3,…, Xn(w) xn)
A notação mais usual é:
FX 1 , X 2 ,..., Xn ( x1 , x2 ,..., xn ) .
PROPRIEDADES DA FUNÇÃO DISTRIBUIÇÃO DE UM VETOR
ALEATÓRIO
i)
FX 1 , X 2 ,..., Xn ( x1, x2 ,...,,...xn ) 0
ii)
FX1 , X 2 ,..., Xn (,,...,,...,) 1
(normalização AX3)
iii) F é monótona não-decrescente em cada argumento.
iv) F é contínua pela direita em cada argumento.
v) i FX1 , X 2 ,..., X i ,..., Xn (,,..., xi ,...,) FX i ( xi ) .
A aplicação usual de (v) é a reobtenção das distribuições marginais
em cada dimensão:
Partindo de
FX ,Y ( x, y ) :
FX ,Y ( x,) FX ( x)
FX ,Y (, y ) FY ( y ) .
A função densidade de um vetor aleatório também pode ser
definida por extensão:
n
f X ( x ) :
FX 1 , X 2 ,..., X n ( x1 , x2 ,..., xn )
.
x1x2 ...xn
FX 1 X 2 ... X n ( x1 , x2 ,..., xn )
x1
x2
...
xn
f X 1 X 2 ... X n (1 , 2 ,... n )d1d 2 ...d n
PROPRIEDADES DAS DENSIDADES DE VETORES
1) Normalização:
...
f X1X 2 ... X n (1 , 2 ,... n )d1d 2 ...d n 1
2) Não-negatividade:
f X 1 , X 2 ,..., X n ( x1 , x2 ,..., xn ) 0
3) Distribuição Marginal:
xi
FX i ( xi )
...
... f X1X 2 ... X n (1 , 2 ,... n )d1d 2 ...d n
4) Densidade Marginal (caso usual):
f X ( x)
f XY ( x, y )dy e fY ( y ) f XY ( x, y )dx
Há que se estudar e ler detalhadamente definição e propriedades
de densidades de probabilidade condicionadas.
Exercício. Duas linhas de produção fabricam um certo tipo de peça.
Suponha que a capacidade em qualquer dia seja 4 peças na linha
1 e 3 peças na linha 2. Admita que o número de peças realmente
produzida em uma dada linha em um dado dia seja uma variável
aleatória.
Sejam X e Y o número de peças produzido pela linha 1 e 2 em um
dado dia, respectivamente. A tabela a seguir dá a distribuição
conjunta de (X, Y ):
(a) Determine a probabilidade que mais peças sejam produzidas pela
linha 2.
(b) Determine as funções probabilidade de massa marginais de X e Y .
Solução. Em sala.
Exercício:
A distribuição conjunta de duas variáveis aleatórias X e Y é constante (e
igual a c) na superfície S mostrada na figura, e zero fora dela. Encontre
o valor de c e avalie as FDP marginais de X e Y.
Solução. A área total é S=4. Logo c=1/4 e integrando, tem-se
Exercício: Suponha que um vetor aleatório bidimensional (X, Y )
tenha densidade conjunta dada por:
(a) Determine a probabilidade que Y − X > 0.
(b) Determine as densidades marginais de X e Y .
Solução:
parte (a)
parte (b)
etc.
Distribuição condicional de X dada Y discreta
Seja A um evento aleatório tal que P(A)>0. Usando o conceito
de probabilidade condicional, podemos definir a distribuição
condicional de X dado o evento A por
A função de distribuição associada à distribuição condicional é
chamada função distribuição condicional de X dado A:
Seja Y uma variável aleatória discreta, tomando somente os valores y1,
y2, . . .. Então, os eventos An = [Y = yn] formam uma partição de Ω. Neste
caso, a distribuição
Distribuição condicional de X dada Y contínua
desde que fY (y) > 0.
A densidade condicional é
desde que fY (y)> 0 e y não seja ponto de descontinuidade de fY .
Independência entre Variáveis Aleatórias
Teorema: As seguintes condições são necessárias e suficientes para testar
se um conjunto {X1, . . . , Xn} de variáveis aleatórias é mutuamente
independente:
a) Se X for um vetor aleatório contínuo,
b) Se X for um vetor aleatório discreto,
c) Se X for um vetor aleatório contínuo,
Relação entre densidades e INDEPENDÊNCIA ESTATÍSTICA
Independência entre duas v.a.’s X e Y. (desacoplamento)
X e Y Independentes FXY ( x, y) FX ( x).FY ( y)
De modo equivalente:
Independência entre duas v.a.’s X e Y. (desacoplamento)
X e Y independentes f XY ( x, y) f X ( x). fY ( y) .
Do ponto de vista de densidades condicionais, a independência
implica em:
f X |Y y ( x) f X ( x) e fY | X x ( y ) fY ( y ) .
Def. VETORES ALEATÓRIOS INDEPENDENTES.
No caso mais geral de vetores aleatórios, a independência é
definida quando
n
FX1X 2 ... X n ( x1 , x2 ,..., xn ) FX i ( xi )
i 1
Independência simplifica substancialmente as coisas! ...
Funções de Variáveis Aleatórias
[TRANSFORMAÇÕES DE VARIÁVEIS ALEATÓRIAS]
Se existe uma função determinista em cuja entrada é
aplicada uma variável aleatória, a saída TAMBÉM será uma
variável aleatória.
Exemplo.
X é v.a.
Uma função quadrática y=x2. (função)
A variável Y=X2 é aleatória.
=> transformação da v.a. X
Como determinar a distribuição de probabilidades da nova
variável (transformada) Y em termos da distribuição da entrada
X, conhecida?
Vejamos. Y=g(X),
(em termos de f.d.p)
FX(x)=P(Xx)
FY(y)=P(Yy)=P(g(X) y).
[Yy] => [Xx1 ou x2Xx3 ou x4Xx5] disjuntos (P é aditiva)
FY(y)=P(Xx1)+P(x2Xx3)+P(x4Xx5).
Escrevendo agora em termos de integrais:
x1
x3
x5
FY ( y ) f X ( x)dx
x2
x4
1
x
g
1 ( y ) (imagem inversa)
Ora, i
Exercício
f X ( x) e xu ( x) . Seja a transformação Y=X2, quem é fY(.)? y>0:
FY ( y )
0
y
y
f X ( x )dx e x dx 1 e
y
0
FY ( y ) 1 e y u(y) . (deriva-se e obtém-se a densidade).
GENERALIZAÇÃO
x1
x3
x5
FY ( y ) ... f X ( x)dx
x2
x4
xn
Para a determinação da densidade de probabilidade, usa-se a
REGRA DE LEIBNITZ
d
d
a ( )
b( )
a ( )
da( )
db( )
f ( x, )dx f a( ),
f b( ),
f ( x, )dx
b
(
)
d
d
(digam-me: um “cabra” vendo uma expressão destas, não fica
feliz em fazer Engenharia ou Ciências exatas?)
Aplicando-a na expressão de FY
fY ( y )
FY ( y )
dx
dx
dx
dx
dx
dx
f X ( x1 ) 1 f X ( x3 ) 3 f X ( x2 ) 2 f X ( x5 ) 5 f X ( x4 ) 4 ... f X ( xn ) n
y
dy
dy
dy
dy
dy
dy
f Y ( y ) f X ( xi )
i
dx i
dy
fY ( y )
i
dxi
f X ( g ( y ))
dy
1
i
g i1 ( y )
.
JACOBIANO da transformação
No caso de vetores aleatórios,
f Y ( y ) f X ( g i1 ( y )) || J ||1
i
g i1 ( y )
Funções biunívocas e diferenciáveis:
Y=g(X), Y=(g1(X), g2(X),..., gn(X)).
g1
x1
g 2
J ( X ) x1
g n
x
1
g1
x2
g 2
x2
g n
x2
g1
xn
g 2
xn
g n
xn
use |det(J(X))|.
Exemplo resolvido.
A transformação de um vetor bidimensional gaussiano em
coordenadas polares, X e Y independentes.
(X,Y) (r,).
Qual a distribuição conjunta da amplitude e da fase, fr( r,)?
Sejam r
x y ;
2
2
y
x
tg 1
O jacobiano da transformação é
r
x
J
x
x
r
x2 y2
y
y
y
x2 y2
y
x2 y2
x
x2 y2
| J | det J
Assim,
Como
f r ( r , )
f XY ( x, y )
r
e
2
| J |
2
1
x2 y2
x2 y2
2 2
1
r.
r
2
2
e
r2
2
2
não aparece em fr, f() deve ser constante (v.a.
uniforme). Como a variável fase é distribuída entre (0,2):
r2
1 r 2 2
f r ( r , )
. 2e
f r ( r ). f ( )
2
As variáveis transformadas são independentes:
amplitude Rayleigh e fase uniforme.
VALOR ESPERADO E MOMENTOS
Uma variável assume valore REAIS. Assim, é possível realizar cálculos,
médias, modas, desvios...
Existem quatro tipos de interpretações da Esperança:
1. Parâmetro m de uma medida de probabilidade, função de
distribuição,
ou
função
probabilidade
de
massa,
também
conhecido como média. Interprete como médias “ponderadas” pela
probabilidade de ocorrência.
2. Um operador linear em um conjunto de variáveis aleatórias
que retorna um valor típico da variável aleatória interpretado
como uma medida de localização da variável aleatória.
3. média do resultado de repetidos experimentos independentes
no longo prazo.
4. preço justo de um jogo com pagamentos descritos por X.
O valor esperado de uma variável aleatória X é definido por
n
E ( X ) : P ( X xi ) xi
k 1
E ( X ) :
xf X ( x)dx
CASO DISCRETO
CASO CONTINUO
Exemplo:
Considere uma variável aleatória X tal que: P(X=−a)=P(X=a)=1/2. Então,
EX=−a(0.5)+a(0.5)=0.
Muitas variáveis aleatórias diferentes podem ter o mesmo valor esperado
ou esperança (e.g. variar o valor de “a” no exemplo anterior).
Exercício: Se X∈{1,2,...,n} for uma variável aleatória com
distribuição de probabilidade uniforme, então a esperança é dada
por:
1
1 n(n 1) (n 1)
E( X ) i .
n
2
2 .
i 1 n
n
BERNOULLI & BINOMIAL.
Bernoulli. Se X∈{0,1} for uma variável aleatória com distribuição de
probabilidade Bernoulli com parâmetro p, sua esperança é dada por:
EX=0(1−p)+1(p)=p.
Binomial. Se X for uma variável aleatória com distribuição de
probabilidade Binomial com parâmetros n e p, sua esperança é dada por:
n
n k
n!
nk
E ( X ) k . p (1 p ) k .
p k (1 p ) n k
k!(n k )!
k 0 k
k 1
n
(n 1)!
p.n.
p k 1 (1 p ) n k np.
k 1 ( k 1)!( n k )!
n
Propriedades da Esperança
1. P(X=c)=1 ⇒ EX=c.
2. P(X≥0)=1 ⇒ EX≥0.
3. E(aX)=aEX, em que “a” um número real qualquer.
4. E(X +Y) = EX + EY .
5. P (X ≥ Y) = 1 ⇒ EX ≥ EY.
6. Se {X1,...,Xn} são variáveis aleatórias mutuamente
n
n
X i E ( X i ) .
independentes, então E
i 1
i 1
Pode-se definir outras medidas de posição de uma variável aleatória, tais
como: mediana e moda.
A mediana de uma v.a. X é qualquer número m tal que
P(X≥m)≥0,5 e P(X≤m)≥0,5.
Se X assume os valores −1,0,1 com probabilidades
1/4,1/4,1/2,
respectivamente,
então
qualquer
número no intervalo [0, 1) é mediana de X.
A moda de uma v.a. discreta é o seu valor mais provável.
A moda da v.a. X do exemplo anterior é 1.
VARIÂNCIA
var X : E X E ( X ) 2 resultando em: var X EX 2 EX 2 .
O segundo momento é uma medida do “espalhamento da v.a.”.
Pode ser calculado “centrado” em qualquer ponto, digamos c:
s : E X c . A
2
variância
(2o
momento
central)
é
o
espalhamento calculado com relação ao “centro” da distribuição.
Proposição.
2
2
var X E X E ( X ) Min E X c
, i.e., a variância é uma medida
cR
do mínimo espalhamento de uma distribuição.
Prova.
(X-c)=(X-E(X)+c-E(X)), quadrando e tomando E(.), tem-se:
E(X-c)2=varX-2E(X-E(X))(c-E(X))+(c-E(X))2. Então,
varX=E(X-c)2+, com >0, pois =(c-E(X))2.
Q.E.D.
Propriedades da Variância
As seguintes propriedades são consequências imediatas.
1. VarX ≥ 0.
2. Se X=c, Var(X)=0.
Prova: Temos que EX=c,
logo Var(X)=E(X−c)2=E(0)=0.
3. Var(X+a)=VarX, em que a é uma constante real.
Prova:
Var(X+a)=E(X+a)2−(E(X+a))2=
=EX2+2aEX+a2−(EX)2−2aEX−a2=EX2−(EX)2=VarX.
4. V ar(aX) = a2VarX
Prova:Var(aX)=E(aX)2−(E(aX))2=a2EX2−a2(EX)2=a2VarX.
5. Se X e Y forem variáveis aleatórias mutuamente
independentes, então Var(X+Y)=VarX +VarY.
Prova:Var(X+Y)=E(X+Y)2−[E(X+Y)]2=E(X2+2XY+Y2)−(EX)2−2EX
EY−(EY)2=EX2+EY2−(EX)2−(EY)2+2E(XY)−2EXEY =VarX+VarY.
6. Se X1,..., Xn são variáveis aleatórias independentes, então
Var(X1+···Xn)=VarX1+···+VarXn. Por indução matemática.
Exemplo. (Uniforme Discreta) Se X tem uma distribuição
uniforme discreta assumindo os valores {x1, x2, . . . , xn} com
mesma probabilidade, então:
var X
2
1
1
2
x
x
.
i
2 i
n i 1
n i 1
n
n
Isto permite definir uma série de médias (momentos) de uma v.a.
E(X), E(X2), E(X3),..., E(Xn)
E os respectivos momentos centrais, relativos à média
=E(X)
(funcionam com o cálculo do centro de massa, momentos de
inércia etc.)
E(X-), E((X-)2), E((X-)3),..., E((X-)n).
Os momentos relevantes são sempre os primeiros, de ordem mais
baixa:
E(X), média ()
E(X2), 2º momento
E(X-)=0 (sem uso),
E((X-)2), variância (2)
Primeiro (medida do comportamento médio)
Segundo (medida de espalhamento e variação, daí o nome)
O desvio padrão é também largamente usado, expressando ideia
similar à variância, mas com interpretação física atrativa
2 : E{( X ) 2 }
Momentos de ordem mais elevada são menos usados.
Entre estes:
LIGADO AO 3º MOMENTO
Coeficiente de assimetria da distribuição
3 :
E ( X )3
3
LIGADO AO 4º MOMENTO CENTRAL
Coeficiente de curtose da distribuição
4 :
E ( X )4
4
.
CASO DE DUAS VARIÁVEIS: momentos conjuntos
X, Y
E(XnYm)
E{(X-X)n(Y-Y)m}.
Se n ou m são nulos, os momentos são marginais, não cruzados.
Para momentos “cruzados”, requer-se n,m0. Os momentos de
menor ordem deste tipo são
CORRELAÇÃO
E(XY):= corr(X,Y)=RX,Y ou
COVARIÂNCIA
E{(X-X)(Y-Y)}:=cov(X,Y)=KX,Y.
Observe o nome co-variância (variância, 2º momento, co=entre
variáveis).
Significado como medida de dependência.
(relação linear => correlação)
Proposição. Variáveis aleatórias
X i in1
n
n
var X i var( X i ) 2 cov( X i , X j )
.
i j
i 1 i 1
Corolário. Variáveis aleatórias
X i in1
independentes
n
n
var X i var( X i )
.
i 1 i 1
INDEPENDÊNCIA E MOMENTOS
X e Y independentes (usando o desacoplamento entre densidades)
E(XnYm)=E(Xn).E(Ym) n,m
Existem os dois tipos de momentos (cruzados) de 2ª ordem
E(XY)
E{(X-X).(Y-Y)}=E(XY)-XY.
Cov e corr são relacionados.
Teste preliminar:
Se E(XY)=E(X)E(Y), então há um “desacoplamento parcial”, de 2ª
ordem.
Neste caso, cov(X,Y)=corr(X,Y)-E(X).E(Y)=0
ISTO É REFERIDO (por abuso) como correlação nula.
Karl Pearson (coef. de correlação).
O coeficiente dito coeficiente de correlação normalizado (deveria
ser de covariância!) é
XY :
K XY
X Y
Mostra-se (próximo slide) que -1 +1.
O caso =0 é definido na literatura como correlação nula.
(não covariacionados, termos “mais correto”, soa estranho e
nunca é usado!)
Teorema: (E(XY))2≤EX2EY2 e (Cov(X,Y))2≤VarX.VarY.
Prova: (aX+Y)2≥ 0 ⇒ E(aX+Y)2≥ 0 ⇒ a2EX2+2aEXY + EY2≥0.
Observe que está equação do segundo grau em “a” não pode ter
duas raízes reais diferentes, pois caso contrário essa expressão
seria negativa para os valores intra-raízes. Pela regra do
discriminante, tem-se: 4(EXY)2−4EX2EY2≤0, e prova-se a
primeira desigualdade.
A
segunda
parte
segue
da
primeira
trocando
X
X−EX e Y por Y−EY na expressão da primeira desigualdade.
por
Exemplo:
Se X é uma variável aleatória gaussiana normalizada ~N(0, 1) e
Y:=X2, mostre que X e Y são não correlacionadas, i.e Corr(X,Y)=0.
Elas são independentes? O que nos ensina este exercício?
Veja que cov(X,Y)=E(XY)-E(X)E(Y)=E(XY)=E(X3)=0, mas X e X2
são obviamente DEPENDENTES!
Lição: Uma ilustração que a recíproca da proposição
«Se X e Y forem independentes, então cov(X,Y)=0» nem sempre
é verdadeira: cov entre duas v.a.’s pode ser nula e elas não serem
independentes.
Cuidados com correlações espúrias
Sempre que há alguma relação (quase) linear entre as variáveis,
há uma alta correlação. Porém a reciproca não é verdadeira: a
existência de alta correlação (até próximo à unidade) não
assegura dependência entre as variáveis.
relação correlação, mas correlação
relação...
Exemplos (consulte, e.g. http://tylervigen.com/)
:-) Correlação entre US spending on science, space, and technology
correlates with Suicides by hanging, strangulation and suffocation
r=0,9979
r=0,9926
SIMULAÇÃO MONTE CARLO*
Estimativa de algibeira para o número de simulações necessárias
para estimar a frequência relativa de evento de probabilidade p
(p desconhecida).
Suponha que você deseja simular um sistema e avaliar uma taxa
de erros ou taxa de acertos (e.g. de peças em uma linha de
montagem, de uma transmissão digital, taxa de colisão de
partículas etc.).
A cada simulação, efetuam-se n repetições do evento e obtendo
um resultado diferente cada vez que a simulação for realizada. O
valor médio é um estimador da probabilidade p (vide anexo).
Embora p<<1 seja desconhecida (típico), deve simular de modo a
garantir um espalhamento pequeno em trono da média, digamos
10% (ou 1%).
=0,1
(critério 10%)
Exemplo. Ao estimar em computador a probabilidade de um
evento que você “desconfia” em uma estimativa grosseira ter
probabilidade da ordem de 10-4, (querendo simular para
encontrar uma estimativa probabilisticamente confiável), use:
N.B. Se o valor da estimativa for
, por exemplo, bem
inferior a sua estimativa inicial, refaça as contas sobre n e refaça
a simulação...
O método clássico de simulação, chamado MONTE CARLO (N.B.
nome inspirado nos casinos no principado de Monte Carlo),
certamente não é indicado para avaliar a taxa de eventos com
probabilidades muito pequenas, e.g., 10-9. (see importance
sampling)
ANEXO. Para um experimento de Bernoulli, k sendo o número de sucessos e n
o número de repetições do experimento, k é uma variável aleatória com
distribuição binomial.
E(k)=np e var(k)=2(k)=np(1-p).
Seja a estimativa de frequência relativa para a probabilidade p do evento
estudado (e repetido):
. Como k é uma variável aleatória,
também o é.
1.
, o estimador é não enviezado.
(o valor médio das diversas simulações tende a fornecer o valor de p)
2.
de modo que o espalhamento relativo à média vale
.
(p pequeno)
Integração Monte Carlo
Hit or miss technique
0g(x)c em axb.
Seja o espaço amostral
b
Deseja-se avaliar S : a g ( x)dx
: {( x, y ) a x b,0 y c}
E uma distribuição 2D-uniforme
p :
S
area ()
N realizações
1
se ( x, y )
f X ,Y ( x, y ) : c(b a)
caso contrário
0
aleatória.
estimador de frequência relativa
pˆ :
nhits
N
ALGORITMO
1. Gere 2N números aleatórias uniformes {Uj}
2. Arranje-os em N pares (U1,U’1), ..., (UN,U’N)
g ( X i ) i=1,2,...,N.
3. Calcule X i a U i (b a) e
4. Conte o número de casos n hits para os quais g(Xi)>cU’i
5. Estime a integral por c(b a) pˆ z
p.(1 p)c(b a)
N
J. Von Neumann (EUA, imigrante Húngaro)
Aplicações
Otimização global (programação matemática)
Sistemas de equações lineares
Integrais múltiplas
Cadeias de Markov
DISTRIBUIÇÃO DE BERNOULLI
Uma v.a. X tem uma distribuição Bernoulli com parâmetro p, em
que 0≤p≤1, se X(w)∈{x0,x1} e p(x1)=p=1−p(x0).
A função de probabilidade Bernoulli pode ser utilizada para
modelar a probabilidade de sucesso em uma única realização de
um
experimento.
Em
geral,
qualquer
variável
aleatória
dicotômica, ou seja que assume somente dois valores, pode ser
modelada por uma distribuição
Bernoulli.
Denomina-se
de
ensaio
de
Bernoulli,
qualquer
experimento que tem uma resposta dicotômica.
Binomial. X~B(n,p)
Dizemos que X tem uma distribuição Binomial com parâmetros n
e p, em que n é um número inteiro e 0≤p≤1, se X(w)∈{0,1,...,n}
e p(k) para k∈{0,1,...,n}. Note que utilizando o Teorema Binomial,
temos que
n k
nk
n
p
(
k
)
p
(
1
p
)
(
p
1
p
)
1
k
.
k 0
k 0
n
n
valor mais provável: examinar a função probabilidade de massa
binomial analiticamente. Note que a razão entre as probabilidades
de dois valores consecutivos da binomial
n!
p k (1 p ) n k
p(k )
n k 1 p
k!(n k )!
.
n
!
p (k 1)
k
1 p .
p k 1 (1 p ) n k 1
(k 1)!(n k 1)!
p (1)
np
1,
Portanto, se p (0) 1 p
então as probabilidades são sempre
decrescentes em k, e o valor mais provável é 0.
p ( n)
1 p
1,
No outro extremo, se p (n 1) n 1 p
então as
probabilidades são estritamente crescentes em k, e o valor mais
provável é n.
1
p
n
Se n 1 p
então a função começa crescendo em k, enquanto
n k 1 p
1
k
1 p
, e depois decresce em
k.
p(k )
n k 1 p
1
k
1 p
Assim, se p (k 1)
para algum valor de k*, tem-se
que k* e k* −1 são os valores mais prováveis.
Caso contrário, o valor mais provável será o maior valor de k para
p(k )
n k 1 p
1
k
1 p
o qual p (k 1)
, i.e., o valor mais provável será o
maior valor de k tal que k<(n+1)p.
Resumindo o comportamento da binomial B(n,p):
p
Avalie-se 1 p . Verifique a faixa em que este valor situa-se:
0
p
1
1 p n
1
p
n
n 1 p
Sempre decrescente Cresce, decresce
p
n
1 p
Sempre crescente
Valor mais provável =pico da distribuição = moda
*
k =0
k * (n 1) p
k*=n
Ilustração dos três casos:
B(3, 0.2)
B(10, 0.1)
B(3, 0.8)
p
0.25
1 p
p
0.111 ...
1 p
p
4
1 p
k*=0
k*=1
k*=n=3
A função geradora de MOMENTOS G(t)
V.A. discreta, assumindo valores {pk}
função polinomial em t, com coeficientes pk:
G(t):=
Bernoulli:
n n
G t = p k q n k t k
k =0 k
G t = q + pt
n
Todo o “conteúdo” disponível na distribuição de probabilidade está
contido nela!
NOTE QUE
1)
E(X0)=G(1)=1
2)
E(X)=G'(1)
3)
E(X2)=G''(1)+G'(1)
4)
Var(X)=G''(1)+G'(1)-[G'(1)]2
Média e variância da Binomial:
G(1)=1
G'(1)=n.p
daí:
◦
◦
média = n.p
variância= n.p.(1-p)
G''(1)=n(n-1)p2
DISTRIBUIÇÃO GEOMÉTRICA X~Geo()
Um v.a. X tem uma distribuição Geométrica com parâmetro β,
em que 0≤β<1, se X(w)∈{1,2,3,...} e p(k)=(1−β)βk−1, para
k∈{1,2,3,...}.
Utilizando o resultado de uma soma infinita de uma Progressão
Geométrica, tem-se que
k 1
k 1
k 1
p
(
k
)
(
1
)
1
.
A função de probabilidade Geométrica pode ser utilizada para
modelar:
o número de repetições do lançamento de uma moeda até a
primeira ocorrência de cara
O tempo de espera medido em unidades de tempo inteira até
a chegada do próximo consumidor em uma fila
a próxima emissão de um fóton.
Memória (ou falta dela)
Distribuição
sem
memória:
Suponha
que
X
tenha
uma
distribuição geométrica com parâmetro β. Mostre que para
quaisquer dois inteiros positivos s e t, P(X>s+t |X>s)=P(X>t).
P( X s t , X s) P( X s t )
P( X s t | X s)
.
Prova.
P( X s)
P( X s)
Mas:
Também
P( X s t )
(1 )
k 1
s t .
k s t 1
P( X s)
k 1
s
(
1
)
. O resultado segue.
k s 1
DISTRIBUIÇÃO BINOMIAL NEGATIVA OU PASCAL X~Pas(p,r)
Esta distribuição é uma generalização óbvia da distribuição
geométrica.
Suponha que ao invés de estarmos interessados no número de
repetições
de
um
experimento
até
a
primeira
ocorrência de um evento, estejamos interessados em calcular o
número de repetições até a r-ésima ocorrência de um evento.
Seja X o número de repetições necessário a fim de que
um evento A possa ocorrer exatamente r vezes.
Tem-se que X= k se, e somente se, A ocorrer na k-ésima repetição
e A tiver ocorrido r−1 vezes nas (k−1) repetições anteriores.
Assumindo
independência
entre
os
experimentos,
k 1 r
p (1 p ) k r
probabilidade é igual r 1
. Portanto,
k 1 r
p (1 p ) k r
P ( X k )
, em que k≥r.
r 1
r
Momentos: E(X)= p
r (1 p )
var(X)= p 2 .
esta
Note que se r=1, temos que X tem uma distribuição geométrica
com parâmetro β=1−p. No caso geral, dizemos que X tem uma
distribuição Binomial Negativa ou Pascal.
DISTRIBUIÇÃO DE POISSON X~Poi().
Dizemos que X tem uma distribuição Poisson com parâmetro λ,
em que λ≥0, se X(w)∈{0,1,...} e
p(k ) e
k
k! , para k∈{0,1,...}.
Efetuando a soma usando a expansão McLaurin da exponencial,
k
p(k ) e k! e .e 1.
k 0
k 0
Logo, esta é uma legítima função probabilidade de massa.
Simeon Poisson (Sceaux, France).
Se X for uma v.a. com distribuição de probabilidade Poisson de
parâmetro λ:
k.e
k
e
k 1
.
Média
E(X)= k 0
Variância
VarX = E(X2)-(EX)2=λ2+λ−(λ)2 = λ.
k!
k 0
(k 1)!
A função de probabilidade Poisson é utilizada para modelar a
contagem do número de ocorrências de eventos aleatórios em um
certo tempo T : número de fótons emitidos por uma fonte de luz
de intensidade I fótons/seg em T segundos (λ =I.T), número de
clientes chegando em uma fila no tempo T (λ=CT), número de
ocorrências de eventos raros no tempo T (λ=CT).
A distribuição de Poisson pode ser introduzida como uma
binomial quando o número de tentativas cresce indefinidamente,
n ,
com
p 0,
mas de forma que
np .
k
n
n k
nk
nk
P ( X k ) p (1 p ) (1 )
.
n
k
k n
Quando n é suficientemente grande,
k
n 1
1
k! ;
k n
Deste modo
(1 ) k 1 ;
n
(1 ) n e .
n
k
lim
p(k ) e
n
k! , k=0,1,2...
Exercício:
Suponha que o número de clientes que chegam em um banco
segue uma distribuição de Poisson. Se a probabilidade de
chegarem 3 clientes for o triplo da de chegarem 4 clientes em um
dado período de 10 minutos. Determine:
(a) Qual o número esperado de clientes que chegam em um
período de 1 hora neste banco?
(b) Qual o número mais provável de clientes que chegam em um
período de 1 hora neste banco?
Moda de uma distribuição de Poisson: razão de dois valores
sucessivos da função probabilidade de massa
pk 1
.
pk
k 1
pk
.
então vale também: p
k
k 1
Um valor mais provável de uma distribuição de Poisson é k∗ tal
que pk+1≤pk∗ e pk-1≤pk∗ . Mas esta condição é equivalente a:
K*≤λ≤k*+1, ou λ−1≤k*≤λ.
Esse é um máximo local. Porém a distribuição é unimodal (tem
um único máximo, ou seja, máximo local é o máximo global). Isso
pode ser inferido do comportamento monotonico em k, em
ambos os lados de k* (crescente à esquerda, decrescente à direita).
Poisson: =<k>. N.B. Raias
Exercício: Os dados da tabela abaixo compilam, em um período de
50 dias, o número X de acidentes de automóvel ocorridos em uma
pequena cidade de interior.
# de acidentes
# de dias
1
18
3
3
0
2
4
21
7
1
a) Calcule E(X)
b) ajuste por uma distribuição de Poisson, recalcule os valores
de P(X=k), para k=0,1...4 e compare com os dados fornecidos.
Comente.
Solução (em sala).
O processo de Poisson corresponde ao caso em que é constante,
expresso por unidade de tempo, de modo que
p(k ) e
t
( t ) k
k! .
Mecânica Quântica⇒ emissão de fótons é modelada com extrema
precisão por um processo de Poisson.
Aplicação em quimiometria:
espectroscopia (espectroscopia por correlação de fótons)
DISTRIBUIÇÃO HIPERGEOMÉTRICA X~H(r,n,N)
A distribuição hipergeométrica descreve o número de sucessos em
uma sequência de n amostras de uma população finita sem
reposição.
Ex: uma carga com N objetos dos quais D têm defeito.
A distribuição hipergeométrica descreve a probabilidade de que em uma
amostra de n objetos distintos escolhidos da carga aleatoriamente
exatamente k objetos sejam defeituosos.
Em geral, se uma variável aleatória X segue uma distribuição
hipergeométrica com parâmetros N, D, e n, então a probabilidade
de termos exatamente k sucessos é dada por:
D N D
k
n
k
.
p (k )
N
n
Esta probabilidade é positiva se: N−D ≥ n−k, ou seja,
k≥max(0,D+n−N), e k ≤ min(n,D).
Esta fórmula pode ser entendida assim:
N
existem n possíveis amostras sem reposição.
D
existem k maneiras de escolher k objetos defeituosos e
N D
existem n k maneiras de preencher o resto da amostra com
objetos sem defeito.
Exercício: Por engano 3 peças defeituosas foram misturadas com
boas formando um lote com 12 peças no total. Escolhendo ao
acaso 4 dessas peças, determine a probabilidade de encontrar:
(a) Pelo menos 2 defeituosas.
(b) No máximo 1 defeituosa.
(c) No mínimo 1 boa.
Solução. N=12, D=3, n=4. max(0,3+4−12)≤ k ≤ min(4,3).
a) k=2 ou (xor) k=3.
p(2)+p(3)
b) K=0 ou (xor) k=1. p(0)+p(1)
c) p(0)+p(1)+p(2)+p(3)=1.
RESUMOS
http://www.wolframalpha.com/input/?i=bernoulli+distribution
http://www.wolframalpha.com/input/?i=binomial+distribution
http://www.wolframalpha.com/input/?i=geometric+distribution
http://www.wolframalpha.com/input/?i=pascal+distribution
http://www.wolframalpha.com/input/?i=poisson+distribution
http://www.wolframalpha.com/input/?i=hypergeometric+distribution
RELAÇÃO ASSINTÓTICA
Quando a população é grande quando comparada ao tamanho da
amostra (ou seja, N>>n) a distribuição hipergeométrica é
aproximada razoavelmente bem por uma distribuição binomial
com parâmetros
n (tamanho da amostra) e
p=D/N (probabilidade de sucesso em um único ensaio).
E(X)=nD/N
var( X )
nD ( N D)( N n)
N
N ( N 1)
TEOREMAS ASSINTÓTICOS
Dá um “trabalhão” calcular estas expressões quando n é grande!
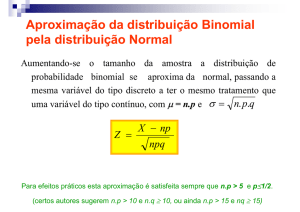
TEOREMA DE “DE MOIVRE-LAPLACE”
Assumindo que
n é grande e também de modo que n.p.(1-p)>>1, então
Vale uma aproximação Gaussiana para a Binomial:
n k
p (1 p ) k
k
( k np ) 2
1
e 2 np (1 p )
2np (1 p )
Assim, o cálculo da probabilidade da ocorrência entre
evento nos
k1 e k2 vezes o
n ensaios pode ser estimado por:
k2
k k1
k2
n k
1
k
p (1 p )
e
k
1
2np (1 p )
k
( x np ) 2
2 np (1 p )
dx
Integral Gaussiana – Tabelada.
k2
k k1
Função Q(.) ou erf(.) ou (.)
k 2 np
k1 np
n k
nk
p (1 p )
n. p.(1 p )
n. p.(1 p )
k
(tirar pirulito de criança!)
Aproximação
II. n
A aproximação proposta por De Moivre requer
Nos casos em que
n.p>>1.
n.p1, isto não é válido. Considera-se agora:
TEOREMA DE POISSON n
k
n k
nk
np ( np )
p (1 p ) e
k!
k
Se n e p0, mas com a relação n.pa, tem-se
k
n k
nk
a (a)
p (1 p) e
k!
k
.
Isto definirá a variável aleatória de Poisson.
Teorema: Se limn→∞ npn = α > 0, então
k
lim n k
nk
a (a)
pn (1 pn ) e
.
n k
k!
Exercício: Ao formar números binários com n dígitos, a
probabilidade de que um dígito incorreto possa aparecer é 0,002.
Se os erros forem independentes, qual é a probabilidade
de encontrar k dígitos incorretos em um número binário de 25
dígitos?
Solução: A probabilidade de que k dígitos sejam incorretos em um
25
(0,002) k (0,998) 25 k
número binários de 25 dígitos é igual a k
.
Em particular, a probabilidade de que pelo menos um dígito seja
incorreto é 1−(0,998)25≈0,049.
Ao adotar a aproximação de Poisson, considera-se uma Poisson
com parâmetro 25×0,002=0,05 o que resulta (complemento de
k=0) em 1−e0,05≈0,049.
Aproximação assintótica para a distribuição de Poisson
O teorema de De Moivre-Laplace estabelece que, sob certas
condições, uma binomial pode ser aproximada por uma gaussiana.
A distribuição de Poisson foi desenvolvida como sendo o limite de
uma binomial quando o n. de tentativas cresce indefinidamente.
De se esperar, a distribuição de Poisson também pode ser
aproximada por uma gaussiana quando >>1.
f X ( x)
1
22
( x ) 2
e
2 2
Resumo de alguns modelos discretos
V.a. discreta
Valor esperado
variância
Uniforme ~U(1,K)
1 K
2
K 2 1
12
Bernoulli ~B(p)
p
p(1-p)
Binomial ~B(n,p)
np
np(1-p)
Geométrica ~G()
1
1
(1 ) 2
Pascal ~Pas(p,r)
r
p
r (1 p )
p2
Poisson ~P()
Hipergeométrica~H(r,N,n)
nr
N
nr ( N n)( N r )
N 2 ( N 1)
DISTRIBUIÇÕES CONTÍNUAS
Uniforme
Normal (Gaussiana)
t-student.
GAUSSIANA
f X ( x)
1
2 2
e
( x )2
2 2
UNIFORME
1
f X ( x) b a
0
a xb
caso contrário
Distribuição Uniforme
X~U[a,b]
Dizemos que X tem uma distribuição uniforme com parâmetros a
e b (números reais, a<b), se a função densidade de X é igual a
fX(x)= b 1 a .u(x−a)u(b−x).
http://www.wolframalpha.com/input/?i=uniform+distribution
Este modelo é frequentemente usado impropriamente para
representar
“completa
ignorância”
sobre
valores
de
um
parâmetro aleatório sobre o qual apenas sabe-se estar no
intervalo finito [a, b].
Exercício. (Uniforme Contínua.) Se X tem uma distribuição
uniforme em [a,b], então:
E( X )
1
1 x2
x.
dx
ba
ba 2
b
a
E( X )
2
b
a
b
a
3 b
1
1 x
x .
dx
ba
ba 3
2
a
ab
2 (o valor esperado é o esperado!)
b3 a 3
3(b a )
(b-a)2
varX
Variância:
12 .
Variável Aleatória Uniforme
1
f X ( x) b a
0
a xb
caso contrário
Distribuição uniforme ~U(-1,1)
Exercício: Sabe-se que é igualmente provável que um dado cliente
possa requisitar um serviço no tempo disponível de serviço [t0, t1].
Se o tempo necessário para executar este serviço é igual a τ<t1-t0,
qual a probabilidade que o serviço será executado antes do
término do intervalo de tempo disponível de serviço?
Solução: Para que o serviço seja executado em tempo hábil, é
necessário que o cliente o requisite antes de t1−τ. Logo,
1
P(X≤t1−τ)= t t
1
0
t1
t0
dt
t1 t0
t1 t0 .
NORMAL OU GAUSSIANA
X ∼N(µ,σ)
Diz-se que X tem uma distribuição Normal (ou Gaussiana) com
parâmetros µ e σ (em µ e σ>0 são números reais), se a função
1
f
(
x
)
e
densidade de X é igual a X
2
2
( x )2
2 2
.
http://www.wolframalpha.com/input/?i=normal+distribution
Esta é realmente uma função densidade de probabilidade:
Fazendo a substituição de variáveis t=(x−µ)/σ, obtém-se:
1
e
2
( x )2
2 2
dx
2
1 t2
e dt : I
2
Para o cálculo de I, usa-se o seguinte artifício:
1
I
2
2
e
t 2 / 2
dt e
s2 / 2
1
ds
2
e
(t 2 s 2 ) / 2
dtds.
Fazendo a mudança de variável t=rcos e s=rsen (polar),
1
dtds=rdrd I 2
2
2
0
0
re
r 2 / 2
drd . Integrando, vem: I2=1.
Historicamente, esta distribuição foi chamada de
“normal” porque ela era amplamente aplicada em fenômenos
biológicos e sociais que era sempre tida como a distribuição
antecipada ou normal.
Os parâmetros µ e σ2 devem ser
ajustados de modo que a representação seja válida.
1) a densidade é simétrica em torno do parâmetro µ,
2) quanto menor o parâmetro σ mais concentrada é a densidade
em torno deste parâmetro µ.
3) os pontos µ−σ e µ+σ são os pontos de inflexão do gráfico de fX.
4) µ e σ2 são a esperança e a variância da distribuição, respect.
5) Se µ=0 e σ2=1 esta densidade é chamada normal reduzida.
Cálculo da esperança (média).
x
E( X )
e
2
( x )2
2 2
dx
, fazendo a mudança de variável
Z:=(x-)/, vem
z
E( X )
e
2
z
e
2
z2
2
z2
2
dz
dz
e
2
z2
2
dz 0
Cálculo do 2o momento.
x
2
E( X )
2
2
e
( x )2
2 2
dx
, fazendo a mudança de variável
Z:=(x-)/, vem
(z )
E( X )
e
2
2
2
z
e
2
2 2
z2
2
z2
2
dz
2z
dz
e
2
z2
2
dz
2
2
e
z2
2
dz .
Então:
E( X )
2
2
2
2
z e
z2
2
2
dz
2
ze
z2
2
dz
2
2
e
z2
2
dz
A 2a parcela é nula (média da normal padrão). A última parcela
decorre da área normalizada. Resta:
E( X )
2
Logo
2
2
var X 2
z2
2
2
z e
Q.E.D.
dz 2
. Integrando:
E( X 2 ) 2 2
Distribuição normal (variando a média e desvio).
Transformações lineares de distribuições normais
Conservação: Transformações lineares de variáveis aleatórias com
distribuição normal também são distribuídas normalmente.
Teorema: Se X ∼N(µ,σ2) e se Y =aX +b, em que a>0 e b∈ , então
Y tem distribuição Y∼N(aµ+b, a2σ2).
Prova.
fY ( y )
FY ( y ) P (Y y ) P ( X
y b
y b
) FX (
).
a
a
1 1
1
y b
e
fX (
). Então fY ( y )
a 2
a
a
y b
)2
a
2 2
(
Derivando,
1
f
(
y
)
e
ou Y
a 2
( y [ b a ]) 2
2 a 2 2
.
Corolário.
Se
X∼N(µ,σ2),
então
Y=X/σ−µ/σ=(x-)/
tem
distribuição normal padrão.
Tabulação da Distribuição Normal
A
integral
de
uma
gaussiana
não
pode
ser
resolvida
analiticamente, contudo métodos de integração numérica podem
ser empregados para calcular integrais. A função de distribuição
acumulada de uma normal padrão é usualmente denotada por Φ.
1
(
t
)
:
2 e
Portanto,
t
para qualquer X∼N(µ,σ
2
2
2
d .
b
a
), o valor de P(a<X≤b) é
Exercício: Suponha que X tenha uma distribuição N(2;0,16).
Empregando a tábua de distribuição normal, calcule P(X ≥ 2,3).
2,3 2
P
(
X
2
,
3
)
1
P
(
X
2
,
3
)
1
1 0,7734 0,2266.
Solução.
0,4
A seguinte aproximação (cálculo numérico) pode ser útil:
( x) 1
1
1 x
1
1
x 2 2 3
.
1 x2 / 2
e
2
Exercício: Certo tipo de bateria elétrica dura, em média, três anos
com um desvio padrão de 0,5 anos. Partindo que a vida da
bateria é normalmente distribuído, encontrar a probabilidade
que uma bateria selecionada ao acaso dure menos de 2,3 anos.
Solução. X~N(=3,=0,5). Deseja-se avaliar P(X<2,3). As
unidades de , e X são em anos.
Expressando em termos de escore Z,
Z
2,3 3
1,4
0,5
.
Assim, P (X < 2,3) = P (Z < −1,4) = 0,0808.
Vide: P[- infinity<X<-1.4] for X~normal(0,1) in Wolfram alpha online calculator
(1,4) 0,9192
1 (1,4) 0,0808
Exercício:
A resistência à compressão de corpos de prova de cimento pode
ser modelada por uma distribuição normal, com média 6000
kg/cm2 e desvio de 100 kg/cm2.
a) qual a probabilidade da resistência de uma amostra ser menor
do que 6250 kg/cm2?
b) que resistência
é excedida por 95% das amostras?
Solução.
X~N(6000, 100). As unidades são todas kg/cm2.
Deseja-se calcular P(X<6250).
Expressando em termos de escore Z,
Z
6250 6000
2,5
100
.
Assim, P (X < 6250) = P (Z < 2,5) = (2,5) 0,9938 .
Vide: P[- infinity<X<2.5] for X~normal(0,1) in Wolfram alpha online calculator
Resp. 99,38%
Para calcular a resistência que é excedida por 95% dos corpos de
prova, deseja-se encontrar o valor de z tal que P(Z<z)=0,95.
Buscando na tabela padrão da normal, tem-se z=z95%=1,65.
Esta é a resistência em escore reduzido, z95%
x95% 6000
1,65
100
x95%=6165 kgf/cm2. Veja que, por simetria:
5875 -- 6000 --- 6125
P(X<6165)=0,95 e, portanto, P(X>5875)=0,95 como solicitado.
Exercício: As notas finais na disciplina ESTATISTICA referentes a
duas turmas distintas são:
Turma T2:
média = 75, desvio = 10
Turma T8:
média = 65, desvio = 8,6
Dois alunos, com notas 85 na turma T2, e 75 na turma T8,
respectivamente, concorrem à monitoria da disciplina. Que
candidato apresenta nota relativamente maior?
Vide:
z score calculator in Wolfram alpha online calculator
Solução.
Em termos absolutos, o candidato 1 tem nota maior. Porém,
calculando relativamente às suas respectivas turmas, pode-se
recalcular as notas expressas em escore reduzido:
z1=(85-75)/10=1.0 e z2=(75-65)/8.6=1.16.
A preferência poderia recair no candidato 2, pois ele apresenta
melhor desempenho relativo, dentro da sua turma. Assim, o
critério de classificação com base na nota escore reduzido poderia
ser adotado no edital de seleção. A dificuldade é que os históricos
contém apenas informações sobre as médias... Isso é pouco.
N.B. Com um sistema automatizado como o sig@, seria fácil indicar também a
nota relativa do aluno na disciplina.
Exercício: Num canal de comunicação, a taxa de erro de bit
recebido é modelada por uma variável de Bernoulli,
p(bit errado)=p=10-5, p(bit correto)=1−p.
Um enlace transmite 16 milhões de bits em uma sessão de
conexão. Deseja-se avaliar a probabilidade de se receber 150 (ou
menos) bits errados nesta transmissão. Avalie esta probabilidade:
a) modelando com uma distribuição binomial (comente sobre os
cálculos envolvidos).
b) Vale o uso de uma aproximação ’grandes números’ ? Normal ou
Poisson? Justifique. Calcule numericamente.
Solução.
a) X é modelada como ~B(16.000.000, 10-5).
n=16.000.000 e p=10-5
A probabilidade P(X=k) de haver k bits recebidos com erros é
calculada via:
16.000.000
.(10 5 ) k .(1 10 5 )16.000.000 k
P ( X k )
k
.
Deseja calcular quanto vale
16.000.000
.(10 5 ) k .(1 10 5 )16.000.000 k
P ( X 150)
k
k 0
150
.
Comentário: avaliar numericamente o somatório é pouco prático,
mesmo com computador.
b) Note que o número médio de bits errados é E(X)=n.p=160 bits.
A variância é var(X)=n.p.(1-p)≈160 donde =12,65.
Usar uma aproximação assintótica pode ser atrativo. Como
n.p>>1, a aproximação pode ser feita por uma gaussiana.
X~N(160, 12,65)
Deseja-se avaliar* P(X<150). Usando escore Z,
Z
150 160
0,79
12,65
(0,79) 0,7852
1 (0,79) 0,2148
Resp. ≈21,48%.
N.B. sem correção de continuidade. Para melhor estimativa, para
aproximar P(a≤X≤b) usa-se P(a-0.5≤X≤b+0.5) antes de usar Z.
t de Student
Diz-se que X tem uma distribuição t de Student com parâmetro
n, em que n é número natural, se a função densidade de X é
f X ( x)
[(n 1) / 2] x
1
n
[n / 2] n
2
( n 1)
2
.
Foi publicada por um autor que se chamou de Student,
pseudônimo de William Gosset, que não podia usar seu nome
verdadeiro para publicar trabalhos enquanto trabalhasse para a
cervejaria Guinness.
Willian Gosset (1876-1937)
http://www.wolframalpha.com/input/?i=t-student+distribution
x 1
Gamma é a função de Euler, ( x) : 0 e d .
O número n nesta expressão é conhecido como número de graus
de liberdade da distribuição t de Student.
Distribuição t de student (vários df).
Ver tabela da distribuição t
Ou consulte Wolfram alpha online calculator: t score
Exercício. Qual o valor de t com =14 graus de liberdade que deixa
uma área de 0,025 à esquerda, e, consequentemente, uma área
de 0,975 à direta?
t0.975 = −t
0.025
= −2,145.
Resposta: -2,145.
CASOS PARTICULARES
1) Se n=1, temos que a distribuição t de Student é igual a
distribuição Cauchy(0,1).
2) Se n→∞, a distribuição t de Student converge para a
distribuição normal padrão.
Esta distribuição é fundamental em Testes de hipóteses, análise de
variância (ANOVA) e em muitas outras situações.
A Distribuição Normal Bivariada
Diz-se que um vetor aleatório (X, Y) possui distribuição normal
bivariada quando tem densidade:
f X ,Y ( x, y )
1
2 1 2
1
1
1
1
2
2
exp
.
( x 1 ) 2
( x 1 ).( y 2 ) 2 ( y 2 )
2 1 2 12
2
1 2
1
2
em que σ1>0, σ2>0, −1<ρ<1, µ1∈ , µ2∈ . Se ρ=0, esta densidade fatora
e temos que X e Y são independentes. Se ρ0, esta densidade não fatora
e X e Y não são independentes.
Propriedades da distribuição normal bivariada:
1. As distribuições marginais de X e de Y são N(µ1,σ12) e N(µ2,σ22).
2. O parâmetro ρ é igual ao coeficiente de correlação entre X e Y.
Esboço da curva normal bivariada, com ρ=µ1=µ2=0 e σ1=σ2=1.
OUTRAS VARIÁVEIS ALEATÓRIAS: ANÚNCIO
Contínuas
exponencial, Cauchy, 2, Laplace, Maxwell,
beta, log-normal, Weibul, F-Senedecor, Pareto
Exponencial
X~E()
fT (T ) .e T u (T ) .
Uma variável aleatória contínua X tem uma distribuição
exponencial de parâmetro λ se sua função densidade de
probabilidade f(x) for do tipo:
e x , x 0
f ( x)
0, caso contrário
Média E(X)=1/λ. Var(X)=1/λ2.
exponencial
chi2 (pronuncia: qui quadrado) X~2(n,)
f X ( x)
2
n 1 x 2 / 2 2
x
e
u ( x)
n/2
n
2 ( n / 2)
n é conhecido como número de graus de liberdade da distribuição
chi-quadrado.
EX=n e VarX=2n.
X~Beta( , )
Beta
Função
fatorial
( x) : x 1e d
0
generalizado
(função
gama
de
Euler)
particular: (n+1)=1.2.3 . . . (n-1)n=n!
EULER
B(a, b) :
Função beta
(a).(b)
( a b)
f X ( x) B ( , ) x 1.(1 x) 1
phibeta ( t )
M ( )
T( )
α β 1
( t a( س) )ﺲ
α 1
( b ( س )ﺲ t )
β 1
Limitada à direita e a esquerda. Pode ser simétrica ou assimétrica.
A simetria é controlada pelos parâmetros.
Weibul
X~W( , )
1 ( x / )
f X ( x; , ) x e
u ( x)
,>0.
F-Senedecor
X~F(n,m) ou F(1,2)
m
f X ( x) B(n, m).
n
m/2
.
x ( m2) / 2
m
1 x
n
(n m) / 2
.u ( x)
1, 2= Graus de liberdade do numerador e do denominador
Log-Normal
f X ( x)
(ln x m ) 2
1
2 x
2
e
2 2
u ( x)
Gamma
X~( , ) ou (r,)
1 x
f X ( x; , )
x e u ( x)
( )
Maxwell
X~M(2)
f X ( x)
Logística
1
2
2
2
/ 2 2
u ( x)
X~L
f X ( x)
Pareto
x 2e x
ex
1 e
x 2
X~Par
f X ( x; , c)
c
c x
1
u ( x c)
,c>0
Mensagem de fechamento:
FIM DO ASSUNTO PARA A SEGUNDA UNIDADE!
APRENDA E FAÇA UM BOM EXERCÍCIO ESCOLAR!