TRABALHO DE CONCLUSÃO DE CURSO
INTRODUÇÃO À TOPOLOGIA ALGÉBRICA: O GRUPO FUNDAMENTAL
DO CÍRCULO
Tulipa Gabriela Guilhermina Juvenal da Silva
JOINVILLE, 2014
Tulipa Gabriela Guilhermina Juvenal da Silva
INTRODUÇÃO À TOPOLOGIA ALGÉBRICA: O
GRUPO FUNDAMENTAL DO CÍRCULO
Trabalho de Graduação apresentado ao
Curso de Licenciatura em Matemática
do Centro de Ciências Tecnológicas,
da Universidade do Estado de Santa
Catarina, como requisito parcial para
a obtenção do grau de Licenciatura em
Matemática.
Orientador: Prof. Me. Rodrigo de
Lima
JOINVILLE, SC
2014
Agradecimentos
A todos os parentes, amigos e professores que me auxiliaram e incentivaram. Em especial, agradeço ao meu orientador,
Rodrigo de Lima e meu irmão, Nelson Juvena. Pois, sem eles
este trabalho jamais seria possível.
Resumo
SILVA, Tulipa da. Introdução à topologia algébrica: grupo
fundamental do círculo. 2014. 103 páginas. Trabalho de Conclusão de Curso (Graduação em Licenciatura em Matemática) Universidade do Estado de Santa Catarina, Joinville, 2014.
A topologia algébrica associa a um determinado espaço topológico uma estrutura algébrica. O grupo fundamental, por exemplo, associa grupos a espaços topológicos conexos por caminhos.
Este tipo de tratamento matemático é capaz de fornecer observações e propriedades referentes a grupos, o que não seria possível
anteriormente. Tomando o grupo quociente de homotopia por
caminhos em um espaço topológico, os quais começam e terminam em um escolhido ponto base, teremos um grupo com a
operação produto entre caminhos. A este grupo dá-se o nome
de grupo fundamental. O grupo fundamental é invariante topológico. Neste trabalho, foi feito um estudo teórico de todas as
definições topológicas necessárias para a compreensão do grupo
fundamental do círculo, e uma aplicação ao demonstrar o Teorema fundamental da álgebra utilizando grupos fundamentais.
Este estudo teve como elemento base o livro intitulado Topology
de James Munkres.
Palavras-chave: Topologia. Topologia quociente. Topologia algébrica. Grupo fundamental do círculo.
Abstract
SILVA, Tulipa da. Algebraic Topology: Fundamental Group of
the Circle. 2014. 103 páginas. Trabalho de Conclusão de Curso
(Graduação em Licenciatura em Matemática) - Universidade do
Estado de Santa Catarina, Joinville, 2014.
The algebraic topology associates a topological space an algebraic structure. The fundamental group, for example, associates
related topological spaces to path connectedness spaces. Thus,
this type of treatment mathematician is able to provide observations regarding properties of groups, what would not possible previously. Taking the quotient group of homotopy by paths
them a topological space whose begin and end in a chosen base
point, we obtain a group with a concatenation operation. To
these group we we the fundamental group. The fundamental
group is a topological invariant. In this work, we had studied theoretical of all topological definitions needed to understanding the
fundamental the group of circle, and their application demonstrating the basic theorem of algebra. This study was based on
the book named Topology by James Munkres.
Key-words: Topology. Quotient topology. Algebraic topology.
Fundamental group of the circle.
Lista de ilustrações
Figura 1 – Diagrama de representação do Teorema (3.9)
55
Figura 2 – Diagrama de representação do Teorema (3.10)
56
Figura 3 – Curva do seno. . . . . . . . . . . . . . . . . .
62
Figura 4 – Homotopias por caminho. . . . . . . . . . . .
79
Figura 5 – Diagrama de lavantamento. . . . . . . . . . .
91
Lista de símbolos
𝐵𝑛
Bola fechada em R𝑛 de centro na origem e raio
unitário
N
Conjunto dos números naturais
Z
Conjunto dos números inteiros
Q
Conjunto dos números racionais
R
Conjunto dos números reais
R𝑛
Conjunto R × . . . × R
⏞
⏟
𝑛 𝑣𝑒𝑧𝑒𝑠
C
Conjunto dos números complexos
𝑆1
Círculo unitário
0
Elemento nulo do espaço em questão
𝑆𝑛
Esfera unitária de dimensão 𝑛
𝐼
Intervalo [0, 1] pertencente aos reais
R2
Plano R × R
Sumário
1
INTRODUÇÃO A ESPAÇOS TOPOLÓGICOS 17
1.1
ESPAÇOS TOPOLÓGICOS . . . . . . . . . .
17
1.2
BASES TOPOLÓGICAS . . . . . . . . . . . .
20
1.3
SUBBASE . . . . . . . . . . . . . . . . . . . .
23
1.4
TOPOLOGIAS NA RETA REAL . . . . . . .
24
2
TOPOLOGIAS IMPORTANTES . . . . . . .
27
2.1
TOPOLOGIA DA ORDEM . . . . . . . . . .
27
2.2
TOPOLOGIA PRODUTO . . . . . . . . . . .
28
2.3
TOPOLOGIA DO SUBESPAÇO . . . . . . .
30
2.4
CONJUNTOS FECHADOS . . . . . . . . . .
32
2.5
ESPAÇOS DE HAUSDORFF . . . . . . . . .
36
3
CONTINUIDADE DE FUNÇÕES . . . . . .
39
3.1
FUNÇÕES CONTÍNUAS . . . . . . . . . . .
39
3.2
HOMEOMORFISMO . . . . . . . . . . . . .
42
3.3
ESPAÇOS MÉTRICOS . . . . . . . . . . . .
45
3.4
TOPOLOGIA QUOCIENTE . . . . . . . . . .
50
3.5
ESPAÇOS CONEXOS . . . . . . . . . . . . .
55
3.6
CONEXIDADE LOCAL . . . . . . . . . . . .
63
3.7
ESPAÇOS COMPACTOS . . . . . . . . . . .
67
4
GRUPO FUNDAMENTAL . . . . . . . . . .
77
4.1
HOMOTOPIA . . . . . . . . . . . . . . . . .
78
4.2
GRUPO FUNDAMENTAL . . . . . . . . . .
84
4.3
ESPAÇOS DE RECOBRIMENTO . . . . . .
88
4.4
GRUPO FUNDAMENTAL DO CÍRCULO . .
4.5
TEOREMA FUNDAMENTAL DA ÁLGEBRA 94
CONCLUSÃO . . . . . . . . . . . . . . . . .
90
99
Referências . . . . . . . . . . . . . . . . . . . 101
17
1 INTRODUÇÃO A ESPAÇOS
TOPOLÓGICOS
1.1 ESPAÇOS TOPOLÓGICOS
Nesta seção estudaremos alguns elementos de topologia
que são essenciais ao que se trata o trabalho. Neste capítulo
foram utilizados como bibliografia prioritaria Munkres (2000),
Lima (2009) e D’Ambrósio (1977).
Definição 1.1. Uma topologia em um conjunto 𝑋 é uma coleção 𝒯 de subconjuntos de 𝑋 com as seguintes propriedades:
i) ∅ e 𝑋 pertencem a 𝒯 ;
ii) A união dos elementos de qualquer subcoleção de 𝒯 pertence a 𝒯 ;
iii) A interseção dos elementos de qualquer subcoleção finita de
𝒯 pertence a 𝒯 .
Um espaço topológico é um par ordenado (𝑋,𝒯 ), com 𝑋 um
conjunto e 𝒯 uma topologia em 𝑋.
Definição 1.2. Seja 𝑋 um espaço topológico com topologia 𝒯 .
Dizemos que um subconjunto 𝑈 de 𝑋 é um aberto em 𝑋 quando
𝑈 pertence a coleção 𝒯 .
Exemplo 1.1. Dado o conjunto 𝑋 = {𝑎, 𝑏, 𝑐, 𝑑, 𝑒} temos que:
18
Capítulo 1. INTRODUÇÃO A ESPAÇOS TOPOLÓGICOS
𝒯1 = {∅, 𝑋, {𝑎}, {𝑐, 𝑑}, {𝑎, 𝑐, 𝑑}, {𝑏, 𝑐, 𝑑, 𝑒} é uma topologia em 𝑋.
𝒯2 = {∅, 𝑋, {𝑎}, {𝑐, 𝑑}, {𝑎, 𝑐, 𝑑}, {𝑏, 𝑐, 𝑑}} não é uma topologia em 𝑋, pois {𝑎, 𝑐, 𝑑} ∪ {𝑏, 𝑐, 𝑑} = {𝑎, 𝑏, 𝑐, 𝑑} ̸∈ 𝒯3 .
𝒯3 = {∅, 𝑋, {𝑎}, {𝑐, 𝑑}, {𝑎, 𝑐, 𝑑}, {𝑎, 𝑏, 𝑑, 𝑒}} não é uma
topologia em 𝑋, pois {𝑎, 𝑐, 𝑑} ∩ {𝑎, 𝑏, 𝑑, 𝑒} = {𝑎, 𝑑} ̸∈ 𝒯4 .
𝒯4 = {∅, 𝑋} é uma topologia em 𝑋.
𝒯5 = 𝒫(𝑋), conjunto das partes de 𝑋 é também uma
topologia em 𝑋.
Em geral, se 𝑋 é um conjunto qualquer, a coleção de
todos os subconjuntos de 𝑋 é uma topologia em 𝑋, denominada topologia discreta. E a topologia dada por 𝒯 = {∅, 𝑋}
é chamada de topologia trivial.
Exemplo 1.2. Sejam 𝑋 um conjunto e 𝒯𝑓 a coleção de todos os
subconjuntos 𝑈 de 𝑋 tais que 𝑋 − 𝑈 é finito ou todo 𝑋. Vamos
mostrar que 𝒯𝑓 é uma topologia em 𝑋. Observamos que 𝑋 e ∅
pertencem a 𝒯𝑓 , uma vez que 𝑋 − 𝑋 = ∅ é finito e 𝑋 − ∅ = 𝑋.
Seja {𝑈𝛼 }𝛼∈𝜆 uma família arbitrária, não vazia, de elementos de
𝒯𝑓 . Temos que
)︃𝑐
(︃
𝑋−
⋃︁
𝑈𝛼 = 𝑋
⋂︁
⋃︁
𝛼∈𝜆
𝑈𝛼
(︃
=𝑋
𝛼∈𝜆
=
⋂︁ (︁
𝛼∈𝜆
𝑋
⋂︁
𝑈𝛼𝑐
⋂︁
)︃
⋂︁
𝑈𝛼𝑐
𝛼∈𝜆
)︁
=
⋂︁
(𝑋 − 𝑈𝛼 ),
𝛼∈𝜆
⋂︀
(𝑋 −𝑈𝛼 ) é finito por se tratar de interseção de
⋃︀
conjuntos finitos. Assim, 𝑋 − 𝑈𝛼 é finito e, portanto, pertence
onde o conjunto
a 𝒯𝑓 . E ainda, seja {𝑈𝑖 }𝑛𝑖=1 um coleção finita de aberto de 𝒯𝑓 ,
1.1. ESPAÇOS TOPOLÓGICOS
19
então
𝑋−
(︃
𝑛
⋂︁
𝑈𝑖 = 𝑋
⋂︁
𝑖=1
𝑛
⋃︁
(𝑋
𝑖=1
𝑛
⋃︀
)︃𝑐
𝑈𝑖
(︃
=𝑋
𝑖=1
=
onde
𝑛
⋂︁
⋂︁
𝑈𝑖𝑐 ) =
⋂︁
𝑛
⋃︁
)︃
𝑈𝑖𝑐
𝑖=1
𝑛
⋃︁
(𝑋 − 𝑈𝑖 ),
𝑖=1
(𝑋 − 𝑈𝑖 ) é uma união finita de conjuntos finitos, impli-
𝑖=1
cando que 𝑋 −
𝑛
⋂︀
𝑈𝑖 ∈ 𝒯𝑓 .
𝑖=1
Da mesma forma, a coleção 𝒯𝑐 de todos os subconjuntos 𝑈 de 𝑋 tal que 𝑋 − 𝑈 é enumerável ou é todo X é uma
topologia em 𝑋. De fato, 𝑋 e ∅ pertencem a 𝒯𝑐 . Utilizando
o fato de que a interseção de conjuntos enumeráveis é enumerável e a união finita de conjuntos enumeráveis é enumerável
⋃︀
⋂︀
(Veja Lima (2004)), temos que 𝑋 − 𝑈𝛼 = (𝑋 − 𝑈𝛼 ) ∈ 𝒯𝑐 e
𝑛
𝑛
⋂︀
⋃︀
𝑋−
𝑈𝑖 =
(𝑋 − 𝑈𝑖 ) ∈ 𝒯𝑐 , sendo {𝑈𝛼 } uma família arbitrá𝑖=1
𝑖=1
ria, de elementos de 𝒯𝑐 e {𝑈𝑖 } uma família finita de elementos
de 𝒯𝑐 .
Definição 1.3. Suponha que 𝒯 e 𝒯 ′ são duas topologias em um
dado conjunto 𝑋 :
∙ Se 𝒯 ⊂ 𝒯 ′ , dizemos que 𝒯 ′ é mais fina que 𝒯 ;
∙ Se 𝒯 ⊃ 𝒯 ′ , dizemos que 𝒯 ′ é menos fina que 𝒯 .
Em particular, sejam 𝒯𝑖 e 𝒯𝑑 as topologias trivial e discreta respectivamente, então dada qualquer topologia 𝒯 temos que 𝒯𝑖 ⊂
𝒯 ⊂ 𝒯𝑑 .
Dizemos que 𝒯 e 𝒯 ′ são comparáveis se 𝒯 ⊂ 𝒯 ′ ou
𝒯 ⊃ 𝒯 ′.
20
Capítulo 1. INTRODUÇÃO A ESPAÇOS TOPOLÓGICOS
1.2 BASES TOPOLÓGICAS
Definição 1.4. Seja 𝑋 é um conjunto qualquer. Uma base para
uma topologia em 𝑋 é uma coleção ℬ de subconjuntos de 𝑋,
chamados elementos base, tal que:
i) Para cada 𝑥 ∈ 𝑋, existe pelo menos um elemento base 𝐵
contendo 𝑥;
ii) Se 𝑥 pertence a interseção de dois elementos base 𝐵1 e
𝐵2 , então existe um elemento base 𝐵3 contendo 𝑥 tal que
𝐵3 ⊂ 𝐵1 ∩ 𝐵2 ,
Se ℬ satisfaz as condições acima, definimos a topologia
𝒯 , gerada por ℬ como segue: Um subconjunto 𝑈 de 𝑋 é dito ser
aberto em 𝑋 (ou seja, um elemento de 𝒯 ) se para cada 𝑥 ∈ 𝑈 ,
existe um elemento base 𝐵𝑥 ∈ ℬ tal que 𝑥 ∈ 𝐵 e 𝐵𝑥 ⊂ 𝑈 .
Precisamos verificar que a coleção 𝒯 gerada pela base ℬ
é de fato uma topologia em 𝑋.
O conjunto vazio pertence a 𝒯 por vacuidade e o conjunto X pertence a T pelo item (i) da Definição (1.4).
Sejam {𝑈𝛼 }𝛼∈𝐽 uma família arbitrária de elementos de
𝒯 e 𝑈 = 𝑈𝛼∈𝐽 𝑈𝛼 . Dado 𝑥 ∈ 𝑈 , existe algum 𝛼 ∈ 𝐽 tal que
𝑥 ∈ 𝑈𝛼 . Como 𝑈𝛼 ∈ 𝒯 , existe um elemento base 𝐵 tal que
𝑥 ∈ 𝐵 ⊂ 𝑈𝛼 . Logo, para cada 𝑥 ∈ 𝑈 , existe um elemento base
que contenha 𝑥 e está contido em 𝑈, ou seja, 𝑈 ∈ 𝒯 .
Dados dois elementos 𝑈1 e 𝑈2 de 𝒯 e 𝑥 ∈ 𝑈1 ∩ 𝑈2 , temos
que 𝑥 ∈ 𝑈1 e 𝑥 ∈ 𝑈2 . Podemos tomar elementos base 𝐵1 e 𝐵2
tais que 𝑥 ∈ 𝐵1 ⊆ 𝑈1 , e 𝑥 ∈ 𝐵2 ⊆ 𝑈2 . Pelo item (𝑖𝑖) Definição
(1.4), existe um elemento base 𝐵3 tal que 𝐵3 ⊆ 𝐵1 ∩ 𝐵2 . Assim,
1.2. BASES TOPOLÓGICAS
21
𝐵1 ∩ 𝐵2 ⊂ 𝑈1 ∩ 𝑈2 e 𝐵3 ⊂ 𝑈1 ∩ 𝑈2 . Ou seja, a interseção entre
dois elementos de 𝒯 pertence a 𝒯 .
Agora esse resultado será estendido por meio de indução
finita para uma interseção de elementos de 𝒯 . Suponha que, se
𝑛−1
⋂︀
{𝑈 }𝑛−1
∈ 𝒯 . Então, 𝑈1 ∩ 𝑈2 ∩
𝑖=1 são abertos em 𝑋 e que 𝑈 =
𝑖=1
... ∩ 𝑈𝑛 = (𝑈1 ∩ ... ∩ 𝑈𝑛−1 ) ∩ 𝑈𝑛 = 𝑈 ∩ 𝑈𝑛 pertence a 𝒯 por se
tratar da interseção entre dois elementos de 𝒯 .
Exemplo 1.3. Sejam 𝑋 um conjunto qualquer. A coleção ℬ de
todos os subconjuntos unitários de 𝑋 forma uma base para a
topologia discreta em 𝑋. De fato, para todo elemento 𝑥 de 𝑋
existe um elemento da base que contém 𝑥,a saber o conjunto
{𝑥}. Além disso, se 𝑥 pertence a interseção de dois elementos
base 𝐵1 = {𝑦} e 𝐵2 = {𝑧}, então 𝐵1 = 𝐵2 = {𝑥}. Tomando
𝐵3 = {𝑥}, temos que 𝑥 ∈ 𝐵3 ⊆ 𝐵1 ∩ 𝐵2 , satisfazendo a condição
(𝑖𝑖) da Definição (1.4). Portanto ℬ, é uma base de 𝑋.
Exemplo 1.4. Se ℬ é uma coleção de todas as regiões circulares
(interior aos círculos) no plano, então ℬ é uma base topológica
no plano. De fato, para todo ponto do plano podemos obter um
círculo com este ponto interior. Além disso, para todo ponto na
interseção entre dois círculos podemos obter um terceiro círculo
contido na interseção e que contenha este ponto. Ver detalhes
em Munkres (2000, p. 81).
Uma outra forma de descrever a topologia gerada por
uma base é dada pelo:
Lema 1.1. Sejam 𝑋 um conjunto e ℬ uma base para topologia 𝒯
em 𝑋. Então, 𝒯 é igual a coleção de todas as uniões de elementos
de ℬ.
22
Capítulo 1. INTRODUÇÃO A ESPAÇOS TOPOLÓGICOS
Demonstração: Dada 𝐵𝛼 uma coleção de elementos
de ℬ, temos que cada 𝐵𝛼 é também um elemento da topologia t,
⋂︀
então a 𝐵𝛼 pertence a 𝑇, ou seja, a união de elementos bases
é um aberto em X. Agora, dado 𝑈 ∈ 𝒯 escolhemos, para cada
𝑥 ∈ 𝑈 , um elemento base 𝐵𝑥 ∈ ℬ tal que 𝑥 ∈ 𝐵𝑥 ⊂ 𝑈, de onde
⋃︀
vem que 𝑈 = 𝑥∈𝑈 𝐵𝑥 , e portanto, a igualdade é satisfeita.
Como já era de se esperar, todo conjunto aberto de 𝑋
pode ser representado como a união de elementos da base topológica. No entanto, esta representação não é única.
O lema a seguir apresenta a obtenção de bases a partir
de topologias conhecidas.
Lema 1.2. Seja (𝑋, 𝒯 ) um espaço topológico. Suponha 𝒞 uma
coleção de conjuntos abertos de 𝑋 tal que para cada conjunto
aberto 𝑈 de 𝑋 e cada 𝑥 em 𝑈 , existe um elemento 𝐶 ∈ 𝒞 tal
que 𝑥 ∈ 𝐶 ⊂ 𝑈 . Então 𝒞 é uma base para topologia em 𝑋.
Demonstração: Primeiro precisamos mostrar que 𝒞 é
uma base. O primeiro item da Definição (1.4) é imediato pois, 𝑋
é aberto por definição e então, para cada elemento 𝑥 ∈ 𝑋, existe
𝐶 ∈ 𝒞 tal que 𝑥 ∈ 𝐶 ⊂ 𝑋. Para o item (𝑖𝑖), seja 𝑥 ∈ 𝐶1 ∩ 𝐶2 com
𝐶1 , 𝐶2 ∈ 𝒞. Então 𝐶1 e 𝐶2 são abertos e, portanto, sua interseção
também é aberta. Assim, por hipótese, existe um elemento 𝐶3
em 𝒞 tal que 𝑥 ∈ 𝐶3 ⊂ 𝐶1 ∩ 𝐶2 . Logo, 𝒞 é uma base para uma
topologia em 𝑋. Sejam 𝒯 ′ a topologia gerada por 𝒞 e 𝒯 a coleção
dos conjuntos abertos de 𝑋, vamos mostrar que 𝒯 = 𝒯 ′ . Seja
𝑈 ∈ 𝒯 . Se 𝑥 ∈ 𝑈, então existe 𝐶 ∈ 𝒞 tal que 𝑥 ∈ 𝐶 ⊂ 𝑈 .
Isto implica que 𝑈 ∈ 𝒯 ′ e assim, 𝒯 ⊂ 𝒯 ′ . Por outro lado, se
𝑊 ∈ 𝒯 ′ , então pelo Lema (1.1), 𝑊 é uma união dos elementos
de 𝒞. Como cada elemento de 𝒞 pertence a topologia 𝒯 , segue
1.3. SUBBASE
23
que 𝑊 também pertence a 𝒯 . E assim a inclusão contrária é
satisfeita.
Lema 1.3. Sejam ℬ e ℬ ′ bases das topologias 𝒯 e 𝒯 ′ , respectivamente em 𝑋, as seguintes afirmações são equivalentes:
1. 𝒯 ′ é mais fina que 𝒯 .
2. Para cada 𝑥 ∈ 𝑋 e cada elemento base 𝐵 ∈ ℬ contendo 𝑥,
existe um elemento base 𝐵 ′ ∈ ℬ ′ tal que 𝑥 ∈ 𝐵 ′ ⊂ ℬ.
Demonstração:
(1) ⇒ (2) Sejam 𝑥 ∈ 𝑋 e 𝐵 ∈ ℬ contendo 𝑥. Por definição 𝐵 ∈ 𝒯 . Por (1) 𝐵 ∈ 𝒯 ′ . Como 𝒯 ′ é gerado por ℬ ′ , segue
que existe um elemento 𝐵 ′ ∈ ℬ ′ , tal que 𝑥 ∈ 𝐵 ′ ⊂ 𝐵.
(2) ⇒ (1)
Sejam 𝑈 elemento de 𝒯 . Sendo 𝐵 uma base de 𝒯 , para
cada 𝑥 ∈ 𝑈 existe um elemento 𝐵 em ℬ tal que 𝑥 ∈ 𝐵 ⊂ 𝑈.
Como ℬ é base de 𝒯 , então existe um elemento 𝐵 em ℬ tal que
𝑥 ∈ 𝐵 ⊂ 𝑈 . Pela condição (2), existe para cada 𝑥 um elemento
𝐵𝑥′ ∈ ℬ ′ tal que 𝑥 ∈ 𝐵 ′ ⊂ 𝐵. O que implica que em 𝑥 ∈ 𝐵 ′ ⊂ 𝑈.
Portanto, 𝑈 = ∩𝐵𝑥′ , ou seja, 𝑈 ∈ 𝒯 ′ .
1.3 SUBBASE
Definição 1.5. Uma subbase 𝑆 para uma topologia em 𝑋 é
uma coleção de subconjuntos de 𝑋 tal que sua união é igual a
𝑋. A topologia gerada pela subbase 𝑆 é definida como sendo a
coleção 𝒯 de todas uniões de interseções finitas de elementos de
𝑆.
24
Capítulo 1. INTRODUÇÃO A ESPAÇOS TOPOLÓGICOS
Vamos verificar que 𝒯 é uma topologia em 𝑋. Para isso
basta mostrar que a coleção ℬ de todas as interseções finitas de
elementos de 𝑆 é uma base pois, isto implicaria pelo Lema (1.1)
que 𝒯 é uma topologia em 𝑋. Dada 𝑥 ∈ 𝑋, 𝑥 pertence a um
elemento de 𝑆 (a união dos elementos de 𝑆 é 𝑋) e portanto 𝑥
pertence a um elemento de ℬ. Assim, a primeira condição para
base está satisfeita.
Para a segunda condição, sejam 𝐵1 = 𝑆1 ∩ 𝑆2 ∩ ... ∩ 𝑆𝑛
e 𝐵2 = 𝑆 ′ 1 ∩ 𝑆 ′ 2 ∩ ... ∩ 𝑆 ′ 𝑚 dois elementos de ℬ.
𝐵1 ∩ 𝐵2 = 𝑆1 ∩ ... ∩ 𝑆𝑛 ∩ 𝑆 ′ 1 ∩ ... ∩ 𝑆 ′ 𝑚 também será
uma interseção finita de elementos de 𝑆 e portanto, pertencente
aℬ
1.4 TOPOLOGIAS NA RETA REAL
Nesta seção vamos apresentar três topologias diferentes
para o conjunto dos números reais e mostrar qual a relação entre
elas.
Definição 1.6. Se ℬ é a coleção de todos os intervalos abertos
na reta real (𝑎, 𝑏) = {𝑥 | 𝑎 < 𝑥 < 𝑏}, então a topologia gerada
por ℬ é chamada topologia usual na reta real.
Quando não é especificada a topologia em R subentendese que a topologia é a usual.
Definição 1.7. Se ℬ ′ é a coleção de todos os intervalo semiabertos na reta real [𝑎, 𝑏) = {𝑥 | 𝑎 ≤ 𝑥 < 𝑏} , a topologia gerada
por ℬ ′ é chamada topologia do limite inferior em R. Esta topologia é representada por R𝑙 .
1.4. TOPOLOGIAS NA RETA REAL
25
Definição 1.8. Seja 𝐾 o conjunto formado por todos os elementos da forma
1
𝑛,
com 𝑛 ∈ Z+ . Seja ℬ ′′ a coleção de todos os
intervalos abertos do tipo (𝑎, 𝑏) = {𝑥 | 𝑎 < 𝑥 < 𝑏} juntamente
com todos os conjuntos da forma (𝑎, 𝑏) − 𝐾. A topologia gerada
por ℬ ′′ é denominada K-topologia, denotada por R𝐾 .
Vamos mostrar que ℬ, ℬ ′ e ℬ ′′ são bases topológicas em
R.
Dado 𝑥 ∈ R e tomando 𝑎, 𝑏 ∈ R tal que 𝑎 < 𝑥 < 𝑏, os
elementos base da forma (𝑎, 𝑏), [𝑎, 𝑏) e (𝑎, 𝑏) das bases ℬ, ℬ ′ e
ℬ ′′ , respectivamente, contêm 𝑥.
Para a segunda condição da definição de base vamos
mostrar caso a caso. No caso da topologia usual, dados dois
intervalos abertos 𝐵1 = (𝑎, 𝑏) e 𝐵2 = (𝑐, 𝑑) elementos base de
𝐵 ′ e 𝑥 ∈ (𝑎, 𝑏) ∩ (𝑐, 𝑑). Temos que as interseções desses dois
conjuntos podem ser:
∙ (𝑐, 𝑏) se 𝑎 < 𝑐 < 𝑏 < 𝑑;
∙ (𝑎, 𝑑) se 𝑐 < 𝑎 < 𝑑 < 𝑏;
∙ (𝑎, 𝑏) se 𝑐 < 𝑎 < 𝑏 < 𝑑;
∙ (𝑐, 𝑑) se 𝑎 < 𝑐 < 𝑑 < 𝑏.
Em todos os casos (𝑎, 𝑏) ∩ (𝑐, 𝑑) ∈ 𝐵 e contêm 𝑥. Uma
análise similar pode ser feita no caso da interseção entre quaisquer intervalos [𝑎, 𝑏) e [𝑐, 𝑑), onde para todo 𝑥 ∈ [𝑎, 𝑏) ∩ [𝑐, 𝑑),
temos que [𝑎, 𝑏) ∩ [𝑐, 𝑑) ∈ 𝐵 ′ .
Agora, no caso de 𝐵 ′′ , podemos ter elementos base da
forma (𝑎, 𝑏) ou (𝑎, 𝑏) − 𝐾. Tomando dois intervalos abertos (𝑎, 𝑏)
26
Capítulo 1. INTRODUÇÃO A ESPAÇOS TOPOLÓGICOS
e (𝑐, 𝑑) recaímos na topologia usual. Tomando 𝐵1 = (𝑎, 𝑏) e
𝐵2 = (𝑐, 𝑑) − 𝐾, temos que 𝐵1 ∩ 𝐵2 = (𝑎, 𝑏) ∩ [(𝑐, 𝑑) − 𝐾] =
[(𝑎, 𝑏) ∩ (𝑐, 𝑑) ∩ 𝐾 𝑐 ] = [(𝑎, 𝑏) ∩ (𝑐, 𝑑)] − 𝐾 que resultará em:
∙ (𝑐, 𝑏) − 𝐾 se 𝑎 < 𝑐 < 𝑏 < 𝑑;
∙ (𝑎, 𝑑) − 𝐾 se 𝑐 < 𝑎 < 𝑑 < 𝑏;
∙ (𝑎, 𝑏) − 𝐾 se 𝑐 < 𝑎 < 𝑏 < 𝑑;
∙ (𝑐, 𝑑) − 𝐾 se 𝑎 < 𝑐 < 𝑑 < 𝑏.
E todos pertencem a 𝐵 ′′ . Para finalizar, se 𝐵1 = (𝑎, 𝑏) − 𝐾 e
𝐵2 = (𝑐, 𝑑) − 𝐾, temos que 𝐵1 ∩ 𝐵2 = (𝑎, 𝑏) ∩ 𝐾 𝑐 ∩ (𝑐, 𝑑) ∩ 𝐾 𝑐 =
(𝑎, 𝑏) ∩ (𝑐, 𝑑) ∩ 𝐾 𝑐 = (𝑎, 𝑏) ∩ (𝑐, 𝑑) − 𝐾, recaindo na situação
anterior.
Uma das implicações dessas definições é que os abertos
usuais de R são abertos em R𝑙 e R𝐾 , ou seja, as topologias R𝑙 e
R𝐾 contém propriamente a topologia usual em R e assim, mais
finas que a topologia em usual em R. Porém, não são comparáveis entre si. A demonstração detalhada está em Munkres (2000,
p.81).
27
2 TOPOLOGIAS IMPORTANTES
2.1 TOPOLOGIA DA ORDEM
Num conjunto 𝑋 ordenado pode-se definir uma topologia a partir da relação de ordem < de 𝑋.
Dados 𝑎, 𝑏 ∈ 𝑋, e usando a relação de ordem, são quatro
os subconjuntos de 𝑋, chamados intervalos, determinados por
𝑎 e 𝑏:
Intervalo aberto: (𝑎, 𝑏) = {𝑥 | 𝑎 < 𝑥 < 𝑏};
Intervalo fechado: [𝑎, 𝑏] = {𝑥 | 𝑎 ≤ 𝑥 ≤ 𝑏};
Intervalos semi-abertos: (𝑎, 𝑏] = {𝑥 | 𝑎 < 𝑥 ≤ 𝑏} e [𝑎, 𝑏) =
{𝑥 | 𝑎 ≤ 𝑥 < 𝑏}.
Definição 2.1. Seja 𝑋 um conjunto, não unitário, com uma
relação de ordem, e seja ℬ a coleção de todos os seguintes conjuntos:
i) Todos os intervalos abertos (𝑎, 𝑏) em 𝑋;
ii) Todos os intervalos da forma [𝑎0 , 𝑏), onde 𝑎0 é o mínimo
(se houver) de 𝑋;
iii) Todos os intervalos da forma (𝑎, 𝑏0 ], onde 𝑏0 é o máximo
(se houver) de 𝑋.
A coleção ℬ é uma base para topologia em 𝑋 denominada Topologia da ordem.
28
Capítulo 2. TOPOLOGIAS IMPORTANTES
De fato, todo elemento de 𝑋 que não é máximo nem
mínimo pertence a algum intervalo do tipo (𝑖), já o máximo,
pertence a todos os intervalos do tipo (𝑖𝑖𝑖) e o mínimo a todos
os intervalos do tipo (𝑖𝑖). Além disso, as interseções entre intervalos serão intervalos ou o conjunto vazio, e portanto para todo
elemento na interseção haverá um intervalo que o contenha e
está contido na interseção.
Exemplo 2.1. A topologia usual de R, apresentada na Definição
(1.6), é a topologia induzida por uma relação de ordem em R.
Exemplo 2.2. O conjunto Z+ é um conjunto ordenado que
possui o mínimo 1. Tomando a base ℬ = {(𝑛 − 1, 𝑛 + 1) | 𝑛 ∈
Z+ 𝑒 𝑛 > 1} ∪ [1, 2). A topologia da ordem gerada por esta base
é a topologia discreta.
Exemplo 2.3. O conjunto 𝑋 = {1, 2} × Z+ é também um conjunto ordenado, pela relação de ordem do dicionário, que possui
(1, 1) como mínimo. No entanto, a topologia da ordem em 𝑋 não
é a topologia discreta pois, não há intervalo aberto que contenha
apenas o elemento (2, 1).
2.2 TOPOLOGIA PRODUTO
Definição 2.2. Sejam 𝑋 e 𝑌 espaços topológicos. A topologia
produto em 𝑋 × 𝑌 é a topologia tendo como base a coleção ℬ
de todos os conjuntos da forma 𝑈 × 𝑉 , onde 𝑈 é aberto em 𝑋 e
𝑉 é aberto em 𝑌 .
Realmente, a coleção ℬ, acima mencionada é uma base
para 𝑋 × 𝑌 . Para cada (𝑥, 𝑦) ∈ 𝑋 × 𝑌, tome o próprio conjunto
𝑋 × 𝑌 como um elemento de ℬ, uma vez que tanto 𝑋 quanto
2.2. TOPOLOGIA PRODUTO
29
𝑌 são abertos em si mesmos. Agora, considere 𝐵1 e 𝐵2 abertos
em 𝑋 × 𝑌 e (𝑥, 𝑦) ∈ 𝐵1 ∩ 𝐵2 . Temos que 𝐵1 ∩ 𝐵2 = (𝑈1 × 𝑉1 ) ∩
(𝑈2 × 𝑉2 ), com 𝑈1 e 𝑈2 são abertos em 𝑋 e 𝑉1 e 𝑉2 são abertos
em 𝑌. Segue que 𝐵1 ∩ 𝐵2 é um elemento base que contêm (𝑥, 𝑦)
e está contido em 𝐵1 ∩ 𝐵2 . Portanto, pela Definição (1.4), ℬ é
base de 𝑋 × 𝑌, como queríamos.
Teorema 2.1. Se ℬ é uma base para topologia em 𝑋 e 𝒞 uma
base para topologia em 𝑌, então a coleção 𝒟 = {𝐵 × 𝐶 | 𝐵 ∈
ℬ e 𝐶 ∈ 𝒞} é uma base para a topologia de 𝑋 × 𝑌 .
Demonstração: Dado um aberto 𝑊 em 𝑋 × 𝑌 e um
elemento (𝑥, 𝑦) ∈ 𝑊 , por definição da topologia produto, existe
um elemento base 𝑈 × 𝑉 tal que (𝑥, 𝑦) ∈ 𝑈 × 𝑉 ⊂ 𝑊 . Como ℬ
e 𝒞 são bases de 𝑋 e 𝑌 respectivamente, podemos escolher um
elemento 𝐵 de ℬ tal que 𝑥 ∈ 𝐵 ⊂ 𝑈 e 𝐶 de 𝒞 tal que 𝑦 ∈ 𝐶 ⊂ 𝑉 .
Assim, (𝑥, 𝑦) ∈ 𝐵 × 𝐶 ⊂ 𝑈 × 𝑉 ⊂ 𝑊 e implica que a coleção 𝒟
satisfaz as hipóteses do Lema (1.2) e, portanto, 𝒟 é uma base
para 𝑋 × 𝑌.
A topologia usual em R2 é gerada pelo produto da topologia usual em R com ela mesma, ou seja, a base é a coleção
dos produto cartesiano de todos os intervalos abertos em R. Pelo
teorema anterior, tomando a coleção dos produtos (𝑎, 𝑏) × (𝑐, 𝑑)
está também servirá como base da topologia em R2
Definição 2.3. Seja 𝜋1 : 𝑋 × 𝑌 → 𝑋 a função definida por
𝜋1 (𝑥, 𝑦) = 𝑥 e 𝜋2 : 𝑋 × 𝑌 → 𝑌 a função definida por 𝜋1 (𝑥, 𝑦) =
𝑦. A imagem de 𝜋1 e 𝜋2 são chamadas projeções de 𝑋 × 𝑌 em
cada um dos fatores, respectivamente.
Se 𝑈 é um subconjunto de 𝑋, então o conjunto 𝜋1−1 (𝑈 )
30
Capítulo 2. TOPOLOGIAS IMPORTANTES
é precisamente o conjunto 𝑈 × 𝑌 o qual é um aberto em 𝑋 × 𝑌 .
Da mesma forma, se 𝑉 é aberto em 𝑌 , então 𝜋2−1 (𝑉 ) = 𝑋 × 𝑉
que é aberto em 𝑋 × 𝑌 .
Teorema 2.2. A coleção 𝑆 = {{𝜋1−1 (𝑈 ) | 𝑈 é aberto em
{𝜋2−1 (𝑉
𝑋}∪
) | 𝑉 é aberto em 𝑌 }} é uma subbase para a topologia
produto em 𝑋 × 𝑌 .
Demonstração: Seja 𝒯 a topologia produto em 𝑋 ×𝑌
′
e 𝒯 a topologia gerada por 𝑆. Todo elemento de 𝑆 pertence a
𝒯 pois é a união de elementos de 𝒯 . Assim 𝒯 ′ ⊂ 𝒯 . Por outro
lado, todo elemento base 𝑈 × 𝑉 de 𝒯 é uma interseção finita
de elementos de 𝑆. Pelo Lema (1.2), 𝑈 × 𝑉 = 𝜋1−1 (𝑈 ) ∩ 𝜋2−1 (𝑉 )
implica que 𝒯 ⊂ 𝒯 ′ .
2.3 TOPOLOGIA DO SUBESPAÇO
Sejam (𝑋, 𝒯 ) um espaço topológico e 𝑌 ⊂ 𝑋. A coleção
𝒯𝑌 = {𝑌 ∩ 𝑈 | 𝑈 ∈ 𝒯 } é uma topologia em 𝑌. De fato,
∙ 𝑌 , ∅ ∈ 𝒯𝑌 pois, ∅ = 𝑌 ∩ ∅ e 𝑌 = 𝑌 ∩ 𝑋.
∙ A interseção finita de abertos de 𝑌 pertence a 𝒯𝑌 pois,
(𝑌 ∩ 𝑈1 ) ∩ · · · ∩ (𝑌 ∩ 𝑈𝑛 ) = 𝑌 ∩ (𝑈1 ∩ · · · ∩ 𝑈𝑛 ).
∙ A união arbitrária de abertos de 𝑌 pertence a 𝒯𝑌 pois,
⋃︁
⋂︁
⋃︁
⋂︁
⋂︁
(𝑈𝛼 𝑌 ) = (
𝑈𝛼 ) 𝑌 = 𝑈
𝑌.
𝛼∈𝐽
𝛼∈𝐽
Definição 2.4. Sejam (𝑋, 𝒯 ) um espaço topológico e 𝑌 ⊂ 𝒜. A
coleção 𝒯𝑌 = {𝑌 ∩ 𝑈 | 𝑈 ∈ 𝒯 } é uma topologia de 𝑌. Chamamos
o par (𝑌, 𝒯𝑌 ) de subespaço topológico de (𝑋, 𝒯 ).
2.3. TOPOLOGIA DO SUBESPAÇO
31
Lema 2.1. Se ℬ é uma base para a topologia em 𝑋, então a
coleção ℬ𝑌 = {𝐵 ∩ 𝑌 | 𝐵 ∈ ℬ} é uma base para a topologia do
subespaço em 𝑌 .
Demonstração: Dado 𝑦 ∈ 𝑈 ∩ 𝑌 , onde 𝑈 é aberto
em 𝑋, podemos escolher um elemento base 𝐵 de 𝑋 tal que
𝑦 ∈ 𝐵 ⊂ 𝑈 . Assim, 𝑦 ∈ 𝐵 ∩ 𝑌 ⊂ 𝑈 ∩ 𝑌. Segue, pelo Lema (1.2),
que esta coleção é uma base para a topologia do subespaço 𝑌 .
Seja 𝑌 um aberto do espaço topológico (𝑋, 𝒯 ). Todo
aberto na topologia do subespaço 𝒯𝑌 será também um aberto na
topologia em 𝑋. De fato, se 𝑈 é aberto em 𝑌, então 𝑈 = 𝑉 ∩ 𝑌
para algum 𝑉 aberto em 𝑋. Daí tem-se que 𝑈 é aberto por ser
uma interseção entre dois abertos de 𝑋.
Teorema 2.3. Se 𝐴 é subespaço topológico de 𝑋 e 𝐵 subespaço
topológico de 𝑌 , então a topologia produto em 𝐴 × 𝐵 é a mesma
topologia que 𝐴 × 𝐵 herda como um subespaço de topológico de
𝑋 ×𝑌.
Demonstração: Sejam 𝑈 e 𝑉 abertos de 𝑋 e 𝑌 respectivamente. Então, 𝑈 × 𝑉 é um elemento base para a topologia
produto de 𝑋 × 𝑌. O elemento (𝑈 × 𝑉 ) ∩ (𝐴 × 𝐵) é um elemento base da topologia do subespaço em 𝐴 × 𝐵. Sabendo que
(𝑈 × 𝑉 ) ∩ (𝐴 × 𝐵) = (𝑈 ∩ 𝐴) × (𝑉 ∩ 𝐵), e que 𝑈 ∩ 𝐴 é aberto
na topologia do subespaço em 𝐴 e 𝑉 ∩ 𝐵 é aberto na topologia
do subespaço em 𝐵 então o conjunto (𝑈 ∩ 𝐴) × (𝑉 ∩ 𝐵) é um
elemento base para a topologia produto em 𝐴 × 𝐵.
Desta forma, as bases para a topologia do subespaço em
𝐴 × 𝐵 e a topologia produto em 𝐴 × 𝐵 são as mesmas. O que
implica que as topologias são a mesma.
32
Capítulo 2. TOPOLOGIAS IMPORTANTES
Definição 2.5. Seja 𝑋 um conjunto, um subconjunto 𝑌 de 𝑋
é convexo em 𝑋 se para cada par de pontos de 𝑋, estes podem
ser unidos por uma linha reta contida em 𝑋. Para o caso de 𝑋
ser um conjunto ordenado, basta que para cada par de pontos 𝑎,
𝑏 ∈ 𝑌 e 𝑎 < 𝑏, todo o intervalo (𝑎, 𝑏) de pontos de 𝑋 está contido
em 𝑌 .
Com essa definição, é imediato que intervalos e raios de
𝑋 são convexos em 𝑋.
Exemplo 2.4. Dado o subconjunto 𝑌 = [0, 1) ∪ {2} de R.
Na topologia do subespaço o conjunto {2} é aberto pois, podemos obtê-lo de 𝑌 ∩ ( 23 , 52 ). Porém, na topologia da ordem em
Y, {2} não é aberto. Todo elemento base da topologia da ordem necessariamente contém valores de 𝑌 menores que 2, pois
na topologia da ordem em 𝑌 os elementos base são da forma
{𝑥 | 𝑥 ∈ 𝑌 e 𝑎 < 𝑥 ≤ 2}
2.4 CONJUNTOS FECHADOS
Definição 2.6. Seja 𝐴 um subconjunto do espaço topológico 𝑋.
∙ O conjunto 𝐴 é dito fechado se o conjunto 𝑋 −𝐴 é aberto.
∙ O interior ( denotado por Int 𝐴) de 𝐴 é a união de todos
os abertos contidos em 𝐴.
¯ é a interseção de todos
∙ O fecho de 𝐴 ( denotado por 𝐴)
os conjuntos fechados que contém 𝐴.
Exemplo 2.5. Na topologia apresentada no Exemplo (1.2), os
conjuntos finitos de 𝑋 são fechados.
2.4. CONJUNTOS FECHADOS
33
Além disto, um conjunto pode ser fechado e aberto ao
mesmo tempo como por exemplo o conjunto vazio.
A definição de topologia pode ser escrita em termos de
conjuntos fechados, como pode ser visto no
Teorema 2.4. Seja 𝑋 um espaço topológico. Então tem-se que:
i) ∅ e 𝑋 são fechados;
ii) Interseções arbitrárias entre conjuntos fechados é fechado;
iii) Uniões finitas de conjuntos fechados são fechados.
Demonstração:
𝑖. 𝑋 − ∅ = 𝑋 e ∅ − 𝑋 = ∅ e ambos são abertos.
𝑖𝑖. Como já foi apresentado no Exemplo (1.2), 𝑋−
⋃︀
(𝑋 − 𝐴𝛼 ). Como a união entre abertos é um aberto,
𝛼∈𝐽
⋂︀
𝛼∈𝐽
⋂︀
𝐴𝛼 =
𝐴𝛼
𝛼∈𝐽
é fechado pois, seu complementar é aberto.
𝑋−
𝑛
⋃︀
𝑖𝑖𝑖. Ainda pelos resultados obtidos no Exemplo (1.2),
𝑛
⋂︀
𝐴𝑖 =
(𝑋 − 𝐴𝑖 ) que são abertos pela definição de
𝑖=1
𝑖=1
topologia. Portanto,
𝑛
⋃︀
𝐴𝑖 é fechado.
𝑖=1
Segue que 𝐼𝑛𝑡𝐴 é aberto por se tratar da união de aber¯
tos e 𝐴 é fechado por se tratar da interseção entre fechados pelo
Teorema (2.4). Além disto, 𝐼𝑛𝑡 𝐴 ⊂ 𝐴 ⊂ 𝐴¯ o que implica que,
¯
se 𝐴 é aberto, então 𝐴 = 𝐼𝑛𝑡 𝐴 e se 𝐴 é fechado, então 𝐴 = 𝐴.
Definição 2.7. Se 𝑈 é um aberto de 𝑋 que contém 𝑥. Neste
caso, dizemos que 𝑈 é uma vizinhança de 𝑥.
34
Capítulo 2. TOPOLOGIAS IMPORTANTES
Definição 2.8. Dizemos que 𝑥 ∈ 𝑋 é um ponto de acumulação de 𝐴 se para toda vizinhança 𝑈 de 𝑥 temos que 𝑈 ∩𝐴−{𝑥} =
̸
∅.
Um exemplo intuitivo para tais definições é um intervalo
de R. O conjunto (𝑎, 𝑏] não é aberto nem fechado, seu fecho é
[𝑎, 𝑏] e seu interior é (𝑎, 𝑏). Onde 𝑎, 𝑏 ∈ R e 𝑎 < 𝑏. Além disto,
𝑎 é um ponto de acumulação que não pertence ao conjunto e 𝑏
um ponto de acumulação que pertence ao conjunto (𝑎, 𝑏].
Dado um subespaço 𝑌 de um espaço topológico 𝑋, então
todo fechado em 𝑌 é da forma 𝑌 − (𝑌 ∩ 𝑈 ) = 𝑌 ∩ (𝑈 𝑐 ), onde 𝑈
é um aberto em 𝑋. Em outras palavras, um conjunto é aberto
na topologia do subespaço se, e somente se, é da forma 𝑌 ∩ 𝑉,
com 𝑉 um conjunto fechado em 𝑋.
Teorema 2.5. Sejam 𝑌 um subespaço de 𝑋, 𝐴 um subconjunto
de 𝑌 e 𝐴¯ o fecho de 𝐴 em 𝑋. Então o fecho de de 𝐴 em 𝑌 é
igual a 𝐴¯ ∩ 𝑌 .
Demonstração: Seja 𝐵 o fecho de 𝐴 em 𝑌 . O conjunto
¯
¯
¯
𝐴 é fechado em 𝑋 e portanto 𝐴∩𝑌
é fechado em 𝑌 . Como 𝐴∩𝑌
contém 𝐴 e 𝐵 é a interseção de todos os subconjuntos fechados de
𝑌 contendo 𝐴, devemos ter 𝐵 ⊂ 𝐴¯ ∩ 𝑌 . Agora, sendo 𝐵 fechado
em 𝑌, então 𝐵 = 𝐶 ∩ 𝑌 para algum 𝐶 fechado em 𝑋 contendo
𝐴. Como 𝐴¯ é a interseção de todos os subconjuntos fechados de
𝑋 que o contenha, 𝐴¯ ⊂ 𝐶. Daí tem-se que 𝐴¯ ∩ 𝑌 ⊂ 𝐶 ∩ 𝑌 = 𝐵
Teorema 2.6. Seja 𝐴 um subconjunto do espaço topológico 𝑋.
Então 𝑥 ∈ 𝐴¯ se, e somente se, para todo conjunto aberto 𝑈
contendo 𝑥 temos que 𝐴 − {𝑥} ∩ 𝑈 é diferente do conjunto vazio.
2.4. CONJUNTOS FECHADOS
35
Demonstração: Vamos provar a ida e a volta por contradição.
Usando a contra positiva, ou seja, 𝑥 ̸∈ 𝐴¯ se, e somente
se, existe um aberto 𝑈 contendo 𝑥 tal que 𝑈 ∩ 𝐴 = ∅. Supondo
¯ o conjunto 𝑈 = 𝑋 − 𝐴 é um conjunto aberto que
que 𝑥 ̸∈ 𝐴,
comtém 𝑥 e 𝑈 ∩ 𝐴 = ∅, pois 𝑈 ∩ 𝐴¯ e 𝐴 ⊆ 𝐴¯ que não intersecta
𝐴.
Reciprocamente, considerando que existe um conjunto
𝑈 aberto em 𝑋 contendo 𝑥 e que 𝐴 ∩ 𝑈 = ∅, segue que 𝑋 − 𝑈 é
um conjunto fechado contendo 𝐴. Pela definição de fecho, 𝑋 − 𝑈
¯
contém 𝐴¯ e consequentemente, 𝑈 ∩ 𝐴¯ = ∅ e 𝑥 ̸∈ 𝐴.
Teorema 2.7. Seja 𝐴 um subconjunto do espaço topológico 𝑋.
Se a topologia de 𝑋 é gerada por uma base, então 𝑥 ∈ 𝐴¯ se,
e somente se, todo elemento base 𝐵 contendo 𝑥 tem interseção
não vazia com 𝐴.
Demonstração: Se todo conjunto aberto que contém
𝑥 intersecta 𝐴, então todo elemento base 𝐵 contendo 𝑥 também
intersecta 𝐴, pois os elementos base são abertos. Por outro lado,
se todo elemento base contendo 𝑥 intersecta 𝐴, então todo conjunto aberto 𝑈 contendo 𝑥 também o faz pois, 𝑈 contém um
elemento base que contém 𝑥.
Teorema 2.8. Seja 𝐴 um subconjunto do espaço topológico 𝑋,
seja 𝐴′ o conjunto de todos os pontos de acumulação de 𝐴. Então
𝐴¯ = 𝐴 ∪ 𝐴′ .
Demonstração: Se 𝑥 ∈ 𝐴′ , toda vizinhança de 𝑥 intersecta 𝐴 em um ponto diferente de 𝑥. Portanto, pelo Teorema
¯ Como, por definição, 𝐴 ⊂ 𝐴,
¯
(2.7), 𝑥 ∈ 𝐴¯ implica que 𝐴′ ⊂ 𝐴.
36
Capítulo 2. TOPOLOGIAS IMPORTANTES
¯
¯ se 𝑥 ∈ 𝐴
então 𝐴 ∪ 𝐴′ ⊂ 𝐴.Para
a inclusão contrária seja 𝑥𝐴,
não há nada a provar, seja então 𝑥 ̸∈ 𝐴. Por estar no fecho toda
vizinhança 𝑈 de 𝑥, este intersecta 𝐴, mas como 𝑥 ̸∈ 𝐴 existe
outro ponto na interseção, o que implica que 𝑥 ∈ 𝐴 ∪ 𝐴′
Corolário 2.1. Um subconjunto de um espaço topológico é fechado se, e somente se, contém todos os pontos de acumulação.
2.5 ESPAÇOS DE HAUSDORFF
Na reta real, com a topologia usual, todo conjunto unitário {𝑥} tal que 𝑥 ∈ R é fechado, pois R−{𝑥} = (−∞, 𝑥)∪(𝑥, +∞)
que são abertos em R. No entanto, isso não necessariamente vale
em um espaço topológico qualquer. Nesta seção veremos as condições necessárias para que esta propriedade seja satisfeita.
Definição 2.9. Uma sequência de pontos 𝑥1 , 𝑥2 , . . . de um espaço topológico 𝑋, converge para um ponto 𝑥 ∈ 𝑋, se para toda
vizinhança 𝑈𝑥 existe um natural 𝑁 tal que 𝑥𝑛 ∈ 𝑈𝑥 para todo
𝑛 > 𝑁.
Exemplo 2.6. Sejam 𝑋 = {𝑎, 𝑏, 𝑐}, 𝒯 = {𝑋, {𝑏}, {𝑎, 𝑏}, {𝑏, 𝑐}, ∅}
e uma sequência 𝑥𝑛 = 𝑏 para todo 𝑛 ∈ N. Esta sequência converge para 𝑏, pois todo aberto que contém 𝑏 existe um natural
𝑁 = 1 tal que 𝑥𝑛 ∈ 𝑈𝑏 para todo 𝑛 > 1. No entanto, a sequência também converge para 𝑎 pois, para todo aberto que contém
𝑎 (𝑋, {𝑎, 𝑏}) existe um natural 𝑁 tal que 𝑥𝑛 ∈ 𝑈𝑎 para todo
𝑛 > 1. Da mesma forma 𝑥𝑛 converge para 𝑐. Além disto, {𝑏} não
é fechado, pois 𝑋 − {𝑏} ∈
/ 𝒯 e, portanto, 𝑋 − {𝑏} não é aberto.
Definição 2.10. Um espaço 𝑋 é dito espaço de Hausdorff se
para cada par 𝑥1 e 𝑥2 de pontos distintos de 𝑋 existem vizinhanças 𝑈1 e 𝑈2 de 𝑥1 e 𝑥2 respectivamente que são disjuntas.
2.5. ESPAÇOS DE HAUSDORFF
37
Exemplo 2.7. Seja 𝑋 um conjunto ordenado um conjunto aberto
na topologia da ordem é um intervalo da forma (𝑎, 𝑏). Se 𝑥
e 𝑦 são pontos distintos neste intervalo (por simplicidade admita 𝑥 < 𝑦), 𝑥 é o sucessor imediato de 𝑦 ou existe 𝑧 tal que
𝑎 < 𝑥 < 𝑧 < 𝑦 < 𝑏. No primeiro caso os intervalos (𝑎, 𝑦) e (𝑥, 𝑏)
e no segundo caso os intervalos (𝑎, 𝑧) e (𝑧, 𝑏) são vizinhanças disjuntas de 𝑥 e 𝑦 respectivamente. Ou seja, todo espaço ordenado
é um espaço de Hausdorff com a topologia da ordem.
Exemplo 2.8. Sejam 𝑋 e 𝑌 espaços de Hausdorff, tome 𝑥1 × 𝑦1
e 𝑥2 × 𝑦2 pontos distintos de 𝑋 × 𝑌 . Tomando 𝑈1 e 𝑈2 vizinhanças disjuntas de 𝑥1 e 𝑥2 respectivamente, e 𝑉1 e 𝑉2 vizinhanças
disjuntas de 𝑦1 e 𝑦2 respectivamente, as vizinhanças 𝑈1 × 𝑉1 e
𝑈2 × 𝑉2 são vizinhanças disjuntas de 𝑥1 × 𝑦1 e 𝑥2 × 𝑦2 respectivamente. E assim, o produto cartesiano entre dois espaços de
Hausdorff é um espaço de Hausdorff.
Observação 2.1. Sejam 𝑌 um subespaço de um espaço de
Hausdorff 𝑋 e 𝑥, 𝑦 ∈ 𝑌 pontos distintos. Se 𝑈 e 𝑉 são vizinhanças disjuntas em 𝑋 de 𝑥 e 𝑦 respectivamente então 𝑌 ∩ 𝑈
e 𝑌 ∩ 𝑉 são vizinhanças disjuntas em 𝑌 na topologia do subespaço de 𝑥 e 𝑦 respectivamente. Desta forma, um subespaço de
um espaço de Hausdorff é um espaço de Hausdorff.
39
3 CONTINUIDADE DE FUNÇÕES
3.1 FUNÇÕES CONTÍNUAS
Definição 3.1. Sejam 𝑋 e 𝑌 espaços topológicos. Uma aplicação 𝑓 : 𝑋 → 𝑌 é dita contínua se, para todo aberto 𝑉 de 𝑌
sua imagem inversa 𝑓 −1 (𝑉 ) é um aberto em 𝑋.
Observação 3.1. Sejam 𝛽 = {𝛽𝛼 }𝛼∈𝜆 uma base para a topologia em 𝑌 , 𝑓 : 𝑋 → 𝑌 uma aplicação e 𝑉 um aberto em 𝑌. Tem-se
⋃︀
⋃︀ −1
que 𝑉 =
𝛽𝛼 o que implica que, 𝑓 −1 (𝑉 ) =
𝑓 (𝛽𝛼 ) e por𝛼∈𝐽
𝛼∈𝐽
tanto, a imagem inversa de um aberto 𝑉 de 𝑌 é aberto em 𝑋
se a imagem inversa de cada elemento base, cuja união é 𝑉, é
aberta em 𝑋.
Observação 3.2. Sejam 𝑆 uma subbase para a topologia em 𝑌 ,
𝑓 : 𝑋 → 𝑌 uma aplicação e 𝐵 um elemento base para 𝑌. Pela
Definição (1.5), elemento 𝐵 pode ser escrito como uma interseção
finita de elementos da subbase.
𝐵 = 𝑆1 ∩ . . . ∩ 𝑆𝑛 ⇒ 𝑓 −1 (𝐵) = 𝑓 −1 (𝑆1 ) ∩ . . . ∩ 𝑓 −1 (𝑆𝑛 )
Portanto, a imagem inversa de um elemento base 𝐵 para 𝑌 é
aberto em 𝑋 se a imagem inversa de cada elemento da subbase,
cuja interseção finita é 𝐵, é aberta em 𝑋.
Exemplo 3.1. Sejam 𝑋 e 𝑌 espaços topológicos discretos, então
qualquer aplicação 𝑓 : 𝑋 → 𝑌 é contínua.
40
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Exemplo 3.2. Se 𝑓 : R𝑙 → R tal que 𝑓 (𝑥) = 𝑥 (função identidade, então 𝑓 é contínua. Basta ver que todo aberto (𝑎, 𝑏) de
R é também aberto de R𝑙 . No entanto, definindo 𝑓 : R → R𝑙 ,
temos que a função 𝑓 não é contínua, pois [0, 1) é um conjunto
aberto em R𝑙 , mas 𝑓 −1 ([0, 1)) = [0, 1) que não é aberto em R.
Definição 3.2. Dizemos que uma aplicação 𝑓 : 𝑋 → 𝑌 é
contínua no ponto 𝑥0 ∈ 𝑋 quando para cada aberto 𝑉 ⊆ 𝑌,
com 𝑓 (𝑥0 ) ∈ 𝑉, existe um aberto 𝑈 ⊆ 𝑋 com 𝑥0 ∈ 𝑈 tal que
𝑓 (𝑈 ) ⊆ 𝑉.
A definição para função contínua aqui apresentada é
equivalente a habitual apresentada em Análise Real.
Sejam 𝑓 : R → R uma aplicação e 𝑥0 ∈ R. Diz-se que
𝑓 é contínua no ponto 𝑥0 se, dado 𝜖 > 0 existe 𝛿 > 0 tal que
𝑥0 − 𝛿 < 𝑥 < 𝑥0 + 𝛿 implica em 𝑓 (𝑥0 ) − 𝜖 < 𝑓 (𝑥) < 𝑓 (𝑥0 ) + 𝜖
(LIMA, 2004).
Vamos verificar que a definição acima coincide com a
Definição (3.2). Considere 𝑓 : R → R contínua. Dado 𝑥0 ∈ R e
𝜖 > 0, o intervalo 𝑉 = (𝑓 (𝑥0 )−𝜖) é um aberto em R e 𝑓 (𝑥0 ) ∈ 𝑉.
Assim, 𝑥0 ∈ 𝑓 −1 (𝑉 ) e é um conjunto aberto em R. Como 𝑥0 ∈
𝑓 −1 (𝑈 ) e 𝑓 −1 (𝑈 ) é aberto, segue que 𝑓 −1 (𝑈 ) contém algum
elemento base (𝑎, 𝑏), com 𝑎 < 𝑥0 < 𝑏. Escolhendo 𝛿 o menor dos
números 𝑥0 − 𝑎 e 𝑏 − 𝑥0 , então se 𝑥0 − 𝛿 < 𝑥 < 𝑥0 + 𝛿 implica que
o ponto 𝑥 ∈ (𝑎, 𝑏) tal que 𝑓 (𝑥) ∈ 𝑉, ou seja, 𝑓 (𝑥0 ) − 𝜖 < 𝑓 (𝑥) <
𝑓 (𝑥0 ) + 𝜖.
Teorema 3.1. Sejam 𝑋 e 𝑌 espaços topológicos e 𝑓 : 𝑋 → 𝑌
uma função, são equivalentes as seguintes afirmações:
i) 𝑓 é contínua;
3.1. FUNÇÕES CONTÍNUAS
41
¯ ⊆ 𝑓 (𝐴);
ii) Para todo subconjunto 𝐴 de 𝑋, tem-se que, 𝑓 (𝐴)
iii) Para todo 𝐵 fechado de 𝑌 , tem-se que, 𝑓 −1 (𝐵) é fechado
em 𝑋.
Demonstração:
¯ Se 𝑥 ∈ 𝐴, então 𝑓 (𝑥) ∈ 𝑓 (𝐴) ⊂
(𝑖 ⇒ 𝑖𝑖) Tome 𝑥 ∈ 𝐴.
𝑓 (𝐴). Como 𝑥 ∈ 𝐴, tome 𝑉 uma vizinhança de 𝑓 (𝑥). Então
¯
𝑓 −1 (𝑉 ), por hipótese, é aberto em 𝑋 contendo 𝑥 e como 𝑥 ∈ 𝐴,
⋂︀
segue que 𝑓 −1 (𝑉 ) 𝐴 ̸= ∅. Desta forma, existe 𝑦 ∈ 𝑓 −1 (𝑉 ) ∩ 𝐴
tal que 𝑦 ̸= 𝑥. Podemos concluir que qualquer vizinhança 𝑉 de
𝑓 (𝑥) tem interseção não vazia com 𝑓 (𝐴) em um ponto 𝑓 (𝑦) ∈
¯ o que implica
𝑉 −𝑓 (𝑥) e portanto, 𝑓 (𝑥) ∈ 𝑓 (𝐴) para todo 𝑥 ∈ 𝐴,
¯ ⊆ 𝑓 (𝐴).
que 𝑓 (𝐴)
(𝑖𝑖 ⇒ 𝑖𝑖𝑖) Sejam 𝐵 fechado em 𝑌 e 𝐴 = 𝑓 −1 (𝐵). Queremos mostrar que 𝑓 −1 (𝐵) é fechado, para isto vamos provar que
𝐴 é igual ao seu fecho. Precisamos mostrar apenas que 𝐴¯ ⊆ 𝐴,
pois a inclusão contrária vem da definição de fecho. Sabemos
que 𝑓 (𝐴) = 𝑓 (𝑓 −1 (𝐵)) e que, 𝑓 (𝑓 −1 (𝐵)) ⊆ 𝐵 (𝑓 (𝐴) ⊆ 𝐵). Por¯ então 𝑓 (𝑥) ∈ 𝑓 (𝐴).
¯ Por hipótese 𝑓 (𝐴)
¯ ⊆ 𝑓 (𝐴),
tanto, se 𝑥 ∈ 𝐴,
¯
mas 𝐵 é fechado e contém 𝑓 (𝐴) e assim, 𝑓 (𝐴) ⊆ 𝐵 = 𝐵.
¯ ⊆ 𝑓 (𝐴) ⊆ 𝐵
¯ = 𝐵. O que implica que
Ou seja, 𝑓 (𝑥) ∈ 𝑓 (𝐴)
𝑓 (𝑥) ∈ 𝑓 −1 (𝐵) = 𝐴. 𝐴¯ = 𝐴 como desejado.
(𝑖𝑖𝑖 ⇒ 𝑖) Seja 𝑉 um aberto de 𝑌. Tome 𝐵 = 𝑌 − 𝑉,
então 𝐵 é fechado e 𝑓 −1 (𝐵) = 𝑓 −1 (𝑌 ) − 𝑓 −1 (𝑉 ) = 𝑋 − 𝑓 −1 (𝑉 ).
Como 𝑓 −1 (𝐵) é fechado em 𝑋, significa que 𝑓 −1 (𝑉 ) é aberto em
𝑋 e portanto, 𝑓 é contínua.
Teorema 3.2. Sejam 𝑋 e 𝑌 espaços topológicos. Uma função
𝑓 : 𝑋 → 𝑌 é contínua se, e somente se, para cada 𝑥0 ∈ 𝑋 e cada
42
Capítulo 3. CONTINUIDADE DE FUNÇÕES
vizinhança 𝑉 de 𝑓 (𝑥) existe uma vizinhança 𝑈 de 𝑥0 , 𝑈 ⊆ 𝑋,
tal que 𝑓 (𝑈 ) ⊆ 𝑉 .
Demonstração: Seja 𝑥 ∈ 𝑋 e 𝑉 uma vizinhança de
𝑓 (𝑥). Supondo que 𝑓 é contínua, temos que o conjunto 𝑈 =
𝑓 −1 (𝑉 ) é uma vizinhança de 𝑥 tal que 𝑓 (𝑈 ) = 𝑓 (𝑓 −1 (𝑉 )) ⊆ 𝑉 .
Por outro lado, consideremos que 𝑓 é contínua em cada
ponto 𝑥0 ∈ 𝑋. 𝑉 um conjunto aberto de 𝑌 , com 𝑥 ∈ 𝑓 −1 (𝑉 ).
Precisamos mostrar que 𝑈 é aberto em 𝑋. Para cada 𝑥 ∈ 𝑈 =
𝑓 −1 (𝑈 ), temos que 𝑓 (𝑥) pertence a 𝑉, e por hipótese, existe uma
vizinhança 𝑈𝑥 de 𝑥 tal que 𝑓 (𝑈𝑥 ) ⊆ 𝑉, implicando que 𝑈𝑥 ⊆
⋃︀
𝑓 −1 (𝑓 (𝑈𝑥 )) = 𝑓 −1 (𝑉 ). Segue que, 𝑈 = 𝑓 −1 (𝑈 ) =
(𝑈𝑥 ),
𝑥∈𝑓 −1 (𝑉 )
ou seja, 𝑈 é escrito como a união das respectivas vizinhanças
para cada 𝑥 ∈ 𝑓 −1 (𝑉 ) e, portanto, 𝑈 é aberto.
3.2 HOMEOMORFISMO
Definição 3.3. Sejam 𝑋 e 𝑌 espaços topológicos. 𝑓 : 𝑋 → 𝑌
uma bijeção. Se ambas 𝑓 e 𝑓 −1 : 𝑌 → 𝑋 são contínuas então 𝑓
é chamada homeomorfismo.
Como 𝑓 é bijeção então 𝑓 (𝑓 −1 (𝑉 )) = 𝑉 para todo 𝑉 ⊂
𝑌 . Assim, é possível dizer que 𝑓 é um homeomorfismo quando 𝑈
é um conjunto aberto em 𝑋 se, e somente se, sua imagem é um
conjunto aberto em 𝑌 . Isto significa dizer que um homeomorfismo não é apenas uma bijeção entre os espaços topológicos,
mas também entre a coleção de seus abertos. Ou seja, o homeomorfismo preserva a estrutura topológica envolvida. Desta
forma, dois espaços homeomorfos têm as mesmas propriedades
topológicas.
3.2. HOMEOMORFISMO
43
Exemplo 3.3. A função identidade definida 𝑖𝑑 : R → R é um
homeomorfismo. Se a definirmos 𝑖𝑑 : R𝑙 → R ou 𝑖𝑑 : R → R𝑙
ela não será mais um homeomorfismo, pela não continuidade da
função com domínio R e imagem R𝑙
Exemplo 3.4. A função 𝑓 : R → R com 𝑓 (𝑥) = 𝑥3 é contínua.
Exemplo 3.5. Todo intervalo aberto (𝑎, 𝑏) ∈ R é homeomorfo
a R. Tome a função 𝑓 : (−1, 1) → R definida por 𝑓 (𝑥) =
𝑥
1−𝑥2 ,
então 𝑓 é um homeomorfismo, ou seja, é sobrejetora e
todo intervalo (elemento base na topologia usual em R) tem
com imagem um aberto e vice-versa. Sua inversa é dada por
√ 2𝑦 2 . Seja 𝑔 : (𝑎, 𝑏) → (−1, 1) definida por
𝑓 −1 (𝑦) =
𝑓 (𝑥) =
1+ (1+4𝑦 )
2(𝑥−𝑏)
𝑏−𝑎 + 1. A
função 𝑔 também é um homeomorfismo.
Assim, a função 𝐹 : (𝑎, 𝑏) → R definida por 𝐹 (𝑥) = (𝑔 ∘ 𝑓 )(𝑥) é
bijetora e contínua, bem como sua inversa, como desejado.
O resultado do Exemplo (3.5) será utilizado com frequência daqui em diante pois, a função 𝑔 nele definida diz que todos
os intervalos da reta são homeomorfos entre si. Além disto, utilizando a função 𝑔 vemos que todos os intervalos fechados da
reta são homeomorfos entre si. Por esse motivo, futuramente,
quando definirmos homotopia por caminhos basta fazê-lo no intervalo [0, 1].
É imediato que a função constante e a composta entre
funções contínuas é contínua. E, restringir o domínio ou a imagem de uma função contínua não altera o fato de ser contínua.
No entanto, a formulação local de continuidade e o lema da colagem, que são os próximos resultados, serão demonstrados devido
a sua importância para o desenvolvimento deste trabalho.
44
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Teorema 3.3. Sejam 𝑋, 𝑌 espaços topológicos. A aplicação
𝑓 : 𝑋 → 𝑌 é contínua se 𝑋 pode ser escrito como a união de
abertos 𝑈𝛼 tais que, para cada 𝛼, 𝑓 restrita a 𝑈𝛼 é contínua.
Demonstração: Seja 𝑉 um aberto em 𝑌. Então
𝑓 −1 (𝑉 )
⋂︁
𝑈𝛼 =
⋃︁
(𝑓 |𝑈𝛼 )−1 (𝑉 )
𝛼
representam o conjunto de todos os 𝑥 ∈ 𝑈𝛼 para os quais 𝑓 (𝑥) ∈
𝑉 . Pela continuidade de 𝑓 restrita a 𝑈𝛼 , 𝑓 −1 (𝑉 ) é um aberto em
⋃︀
⋂︀
𝑈𝛼 e portanto, 𝑓 −1 (𝑉 ) = 𝛼 𝑓 −1 (𝑉 ) 𝑈𝛼 é um aberto em 𝑋
Teorema 3.4. (Lema da colagem) Sejam 𝑋 = 𝐴 ∪ 𝐵, onde
𝐴 e 𝐵 são fechados em 𝑋, 𝑓 : 𝐴 → 𝑌 e 𝑔 : 𝐵 → 𝑌 contínuas.
Se 𝑓 (𝑥) = 𝑔(𝑥), para todo ⎧
𝑥 ∈ 𝐴 ∩ 𝐵, então a função ℎ : 𝑋 → 𝑌
⎨𝑓 (𝑥), se 𝑥 ∈ 𝐴
definida da forma ℎ(𝑥) =
é contínua.
⎩𝑔(𝑥), se 𝑥 ∈ 𝐵
Demonstração: Seja 𝐶 um subconjunto fechado de 𝑌 ,
−1
então ℎ
(𝐶) = 𝑓 −1 (𝐶) ∪ 𝑔 −1 (𝐶). Além disso, 𝑓 −1 (𝐶) é fechado
em 𝐴 e 𝑔 −1 (𝐶) fechado em 𝐵, pela continuidade de 𝑓 e 𝑔, então
𝑓 −1 (𝐶) e 𝑔 −1 (𝐶) são em 𝑋, consequentemente ℎ−1 (𝐶) é fechado
em 𝑋, pois a união de um número finito de conjuntos fechados é
um conjunto fechado. Assim, ℎ−1 (𝐶) é contínua, pelo Teorema
(3.2).
Outro tipo de aplicação contínua, muito importante para
definir homotopia, é a aplicação em produtos cartesianos.
Teorema 3.5. Seja 𝑓 : 𝐴 → 𝑋×𝑌 dada por 𝑓 (𝑎) = (𝑓1 (𝑎), 𝑓2 (𝑎)).
Então 𝑓 é contínua se, e somente se, as aplicações 𝑓1 : 𝐴 → 𝑋
e 𝑓2 : 𝐴 → 𝑌 são contínuas.
3.3. ESPAÇOS MÉTRICOS
45
Demonstração: Seja 𝜋1 : 𝑋 × 𝑌 → 𝑋 e 𝜋2 : 𝑋 × 𝑌 →
𝑌 as projeções em 𝑋 e 𝑌, respectivamente, ou seja, 𝜋1 (𝑥, 𝑦) = 𝑥 e
𝜋2 (𝑥, 𝑦) = 𝑦. Essas aplicações são contínuas, realmente, se 𝑈 e 𝑉
são abertos em 𝑋 e 𝑌, respectivamente, então 𝜋1−1 (𝑈 ) = 𝑈 × 𝑌
e 𝜋1−1 (𝑉 ) = 𝑋 × 𝑉 são abertos em 𝑋 × 𝑌 . Além disso, para
cada 𝑎 ∈ 𝐴 temos que 𝑓1 (𝑎) = 𝜋1 (𝑓 (𝑎)) e 𝑓2 (𝑎) = 𝜋2 (𝑓 (𝑎)).
As funções coordenadas 𝑓1 e 𝑓2 assim definidas, são compostas
entre funções contínuas e portanto, são contínuas.
Por outro lado, suponha que 𝑓1 e 𝑓2 são contínuas. Tome
um elemento base 𝑈 × 𝑉 da topologia produto de 𝑋 × 𝑌 . Um
ponto 𝑎 ∈ 𝑓 −1 (𝑈 × 𝑉 ) se, e somente se, 𝑓1 (𝑎) ∈ 𝑈 e 𝑓2 (𝑎) ∈ 𝑉 .
Portanto, 𝑓 −1 (𝑈 × 𝑉 ) = 𝑓1−1 (𝑈 ) ∩ 𝑓2−1 (𝑉 ) com ambos 𝑓1−1 (𝑈 )
e 𝑓2−1 (𝑉 ) abertos, e portanto 𝑓 −1 (𝑈 × 𝑉 ) é aberto em 𝐴 e é
contínua.
Um homeomorfismos importante é entre a circunferência
e o quadrado, que do ponto de vista topológico são equivalentes.
Exemplo 3.6. Sejam 𝑆 1 = {(𝑥, 𝑦) ∈ R2 | 𝑥2 + 𝑦 2 = 1} a circunferência com centro na origem e raio unitário e 𝑇 = {(𝑥, 𝑦) ∈
R2 | |𝑥|+|𝑦| = 1} o quadrado centrado na origem e lado medindo
√
2. Deste modo, 𝑆 1 e 𝑇 são homeomorfos,
de fato,
(︁
)︁ a aplicação
𝑓 : 𝑆 1 → 𝑇 dada por 𝑓 (𝑥, 𝑦) =
𝑥
(︂|𝑥|+|𝑦|
bijetora, e com inversa 𝑓 −1 (𝑥, 𝑦) = √ 2𝑥
𝑦
, |𝑥|+|𝑦|
𝑥 +𝑦 2
,√
é contínua,
)︂
.
2
𝑦
𝑥2 +𝑦
3.3 ESPAÇOS MÉTRICOS
Os espaços métricos são um dos tipos de espaços mais
interessantes de serem estudados, não somente por serem muito
úteis e aplicáveis mas também pela quantidade de teoremas e
46
Capítulo 3. CONTINUIDADE DE FUNÇÕES
características específicas de tais conjuntos. No entanto, nem
sempre um conjunto é metrizável.
Definição 3.4. Uma métrica em um conjunto 𝑋 é a função
𝑑 : 𝑋 × 𝑋 → R com as seguintes propriedades:
1. 𝑑(𝑥, 𝑦) > 0 se 𝑥 ̸= 𝑦 e 𝑑(𝑥, 𝑦) = 0 se 𝑥 ̸= 𝑦;
2. 𝑑(𝑥, 𝑦)=d(y,x) para todo 𝑥, 𝑦 ∈ 𝑋;
3. 𝑑(𝑥, 𝑧) ≤ 𝑑(𝑥, 𝑦) + 𝑑(𝑦, 𝑧) para todo 𝑥,𝑦, 𝑧 ∈ 𝑋 (desigualdade triangular).
O número 𝑑(𝑥, 𝑦) é distância entre 𝑥 e 𝑦 na métrica 𝑑 e
(𝑀, 𝑑) é denominado um espaço métrico.
Definição 3.5. Sejam (𝑀, 𝑑) um espaço métrico e 𝑥 ∈ 𝑋. Dado
𝜖 > 0 o conjunto 𝐵𝑑 (𝑥, 𝜖) = {𝑦|𝑑(𝑥, 𝑦) < 𝜖} (todos os pares (𝑥, 𝑦)
cuja distância é menor que 𝜖) é chamada bola aberta centrada
em 𝑥.
Definição 3.6. Seja 𝑑 é uma métrica em 𝑋. A coleção de todas
as bolas abertas 𝐵𝑑 (𝑥, 𝜖), para 𝑥 ∈ 𝑋 e 𝜖 > 0 é uma base para a
topologia em 𝑋, chamada topologia induzida pela métrica 𝑑.
Afirmamos que, de fato, o conjunto de todas as bolas
abertas de 𝑋 forma uma base para a topologia em 𝑋. Se 𝑥 ∈ 𝑋,
temos que, para qualquer 𝜖 > 0, definindo 𝛿 = 𝜖 − 𝑑(𝑥, 𝑦) para
todo 𝑥, 𝑦 ∈ 𝑋 temos que 𝐵(𝑦, 𝛿) ⊂ 𝐵(𝑥, 𝜖). Em particular, se 𝑧 ∈
𝐵(𝑦, 𝛿) então 𝑑(𝑦, 𝑧) < 𝜖−𝑑(𝑥, 𝑦) e 𝑑(𝑥, 𝑧) < 𝑑(𝑥, 𝑦)+𝑑(𝑦, 𝑧) < 𝜖,
ou seja, em toda interseção não vazia entre elementos base, é
possível obter um 𝜖 tal que existe um elemento base contido
nesta interseção.
3.3. ESPAÇOS MÉTRICOS
47
Exemplo 3.7. A métrica usual em R induz a mesma topologia
da ordem. Basta notar que cada elemento base (𝑎, 𝑏) da topologia
da ordem é um elemento base da topologia da métrica tomando
𝐵(𝑥, 𝜖), onde 𝑥 =
𝑎+𝑏
2
e𝜖=
𝑏−𝑎
2 .
Por outro lado toda 𝜖 − 𝑏𝑜𝑙𝑎 é
o intervalo aberto (𝑥 − 𝜖, 𝑥 + 𝜖).
Definição 3.7. Seja 𝑋 um espaço métrico com métrica 𝑑. Um
subconjunto 𝐴 de 𝑋 é dito ser limitado se existir algum número
𝑀 tal que 𝑑(𝑎1 , 𝑎2 ) < 𝑀, para todo para de pontos 𝑎1 e 𝑎2 de
𝐴. Se 𝐴 é limitado e não vazio, o diâmetro de (𝐴) é definido
como o número 𝑑𝑖𝑎𝑚𝐴 = 𝑠𝑢𝑝{𝑑(𝑎1 , 𝑎2 ) | 𝑎1 , 𝑎2 ∈ 𝐴}.
A limitação de um conjunto não é uma propriedade exclusivamente topológica, depende também da métrica envolvida.
Lema 3.1. Seja 𝑑 e 𝑑′ duas métricas em 𝑋 e 𝒯 e 𝒯 ′ suas
respectivas topologias induzidas. Então, 𝒯 ′ é mais fina que 𝒯 se,
e somente se, para cada 𝑥 ∈ 𝑋 e 𝜖 > 0, existe 𝛿 > 0 tal que
𝐵𝑑′ (𝑥, 𝛿) ⊂ 𝐵𝑑 (𝑥, 𝜖).
Demonstração: Suponha 𝒯 ′ ⊂ 𝒯 . Dado 𝐵𝑑 (𝑥, 𝜖) ∈ 𝒯 ,
pelo Lema (1.2), existe 𝐵 ′ ∈ 𝒯 ′ tal que 𝑥 ∈ 𝐵 ′ ⊂ 𝐵𝑑 (𝑥, 𝜖).
Então podemos encontrar uma bola aberta da forma 𝐵𝑑′ (𝑥, 𝛿)
centrada em 𝑥. Para o caminho inverso, suponha a condição
𝛿 − 𝜖 válida. Então, dado um elemento base 𝐵 de 𝒯 contendo
𝑥, podemos encontrar 𝐵𝑑 (𝑥, 𝜖). Por hipótese existe 𝛿 tal que
𝐵𝑑 (𝑥, 𝛿) ⊂ 𝐵𝑑 (𝑥, 𝜖), o que implica pelo Lema (1.2) que 𝒯 ′ ⊂ 𝒯 .
Definição 3.8. Dado 𝑥 = (𝑥1 , . . . , 𝑥𝑛 ) ∈ R𝑛 definimos:
𝑖) Norma de 𝑥:
||𝑥|| =
√︁
𝑥21 , . . . , 𝑥2𝑛 ;
48
Capítulo 3. CONTINUIDADE DE FUNÇÕES
𝑖𝑖) Métrica euclidiana:
𝑑(𝑥, 𝑦) = ||𝑥 − 𝑦|| =
√︀
(𝑥1 − 𝑦1 )2 , . . . , (𝑥𝑛 − 𝑦𝑛 )2 ;
𝑖𝑖𝑖)Métrica quadrada:
𝜌(𝑥, 𝑦) = 𝑚𝑎𝑥{|𝑥1 − 𝑦1 |, . . . , |𝑥2 − 𝑦2 }.
Teorema 3.6. As topologias em R𝑛 induzidas pelas métricas
euclidiana 𝑑 e quadrada 𝜌 coincidem com a topologia produto
em R𝑛 .
Demonstração: Sejam 𝑥 = (𝑥1 , . . . , 𝑥𝑛 ) e 𝑦 = (𝑦1 , . . . , 𝑦𝑛 )
dois pontos de R𝑛 então existe 𝑖 ∈ 1, . . . , 𝑛 tal que
1
𝜌(𝑥, 𝑦) = |𝑥 − 𝑦| = [(𝑥𝑖 − 𝑦𝑖 )2 ] 2
1
≤ [(𝑥1 −𝑦1 )2 +. . .+(𝑥𝑖 −𝑦𝑖 )2 +. . .+(𝑥𝑛 −𝑦𝑛 )2 ] 2
e, por outro lado
1
1
𝑑(𝑥, 𝑦) = [(𝑥1 − 𝑦1 )2 + . . . + (𝑥𝑛 − 𝑦𝑛 )2 ] 2 ≤ [𝑛(𝑥𝑖 − 𝑦𝑖 )2 ] 2 =
√
𝑛𝜌(𝑥, 𝑦).
√
Portanto, 𝜌(𝑥, 𝑦) ≤ 𝑑(𝑥, 𝑦) ≤ 𝑛𝜌(𝑥, 𝑦). E, 𝐵𝑑 (𝑥, 𝜖) ⊂
𝐵𝜌 para todo 𝑥 e 𝜖, pois se 𝑑(𝑥, 𝑦) < 𝜖 então 𝜌(𝑥, 𝑦) < 𝜖. E,
𝐵𝜌 (𝑥, 𝑛𝜖 ) ⊂ 𝐵𝑑 (𝑥, 𝜖), para todo 𝑥 e 𝜖. Assim, as topologias induzidas por 𝑑 e 𝜌 são a mesma topologia.
Agora, tome 𝐵 = (𝑎1 , 𝑏1 ) × . . . × (𝑎𝑛 , 𝑏𝑛 ) um elemento
da base da topologia produto. Se 𝑥 é um elemento de 𝐵, para
cada 𝑖 existe um 𝜖𝑖 tal que (𝑥𝑖 − 𝜖𝑖 , 𝑥𝑖 + 𝜖𝑖 ) ⊂ (𝑎𝑖 , 𝑏𝑖 ). Escolha
𝜖 = 𝑚𝑖𝑛{𝜖𝑖 |, 𝑖 = 1, . . . , 𝑛}. Então, teremos 𝐵𝜌 (𝑥, 𝜖) ⊂ 𝐵. Por
outro lado, seja 𝐵𝜌 um elemento da topologia induzida por 𝜌, o
próprio conjunto 𝐵𝜌 (𝑥, 𝜖) é um elemento da topologia produto
pois, 𝐵𝜌 (𝑥, 𝜖) = (𝑥1 − 𝜖, 𝑥1 + 𝜖) × (𝑥𝑛 − 𝜖, 𝑥𝑛 + 𝜖).
3.3. ESPAÇOS MÉTRICOS
49
Um caso particular deste teorema se dá quando 𝑛 = 2 e
1
temos que 𝑑(𝑥, 𝑦) = [(𝑥1 − 𝑦1 )2 + (𝑥2 − 𝑦2 )2 ] 2 e 𝐵𝜌 = 𝑚𝑎𝑥{|𝑥1 −
𝑦1 |, |𝑥2 − 𝑦2 |} induzem a mesma topologia que a topologia da
ordem em R2 . Ou seja, está provado que as métricas do Exemplo
(1.4) são a mesma.
Um subespaço de um espaço métrico é um espaço métrico, basta restringir a métrica 𝑑 ao subespaço.
Lema 3.2. (Lema da sequência) Sejam 𝑋 um espaço topológico e 𝐴 ⊂ 𝑋, se existe uma sequência de pontos de 𝐴 conver¯ A recíproca será válida quando
gindo para 𝑥 ∈ 𝐴, então 𝑥 ∈ 𝐴.
𝑋 é metrizável.
Demonstração: Suponha 𝑥𝑛 uma sequência convergindo para 𝑥 ∈ 𝐴. Então, toda vizinhança 𝑈𝑥 de 𝑥 contém pontos de 𝐴 diferentes de 𝑥, assim, 𝑥 é um ponto de acumulação
de 𝐴 e pertence ao seu fecho. Para a recíproca, suponha 𝑋 me¯ Seja 𝑑 a métrica que induz uma topologia em
trizável e 𝑥 ∈ 𝐴.
𝑋. Para cada 𝑛 ∈ N tome a vizinhança 𝐵𝑑 (𝑥, 𝑛1 ) e escolha 𝑥𝑛
como sendo um ponto da interseção com 𝐴. Esta sequência converge para 𝑥 e toda vizinhança 𝑈𝑥 de 𝑥 contém uma 𝜖 − 𝑏𝑜𝑙𝑎
𝐵𝑑 (𝑥, 𝜖) centrada em 𝑥. Se tomarmos 𝑁 de forma que 𝑁1 < 𝜖,
então 𝑈𝑥 ⊂ 𝐴 contém 𝑥𝑖 para todo 𝑖 ≥ 𝑁 (𝐴 contém todos os
abertos 𝑈𝑥 para 𝑁 grande o bastante).
Por argumentos de 𝜖 − 𝛿 temos que as operações de adição, substração e multiplicação em R são funções contínuas de
R × R → R e a operação de divisão é uma função contínua de
R × R − {0} → R. (LIMA, 2004)
Teorema 3.7. Se 𝑋 é um espaço topológico qualquer e 𝑓 , 𝑔 :
𝑋 → R são funções contínuas, então 𝑓 + 𝑔, 𝑓 − 𝑔 e 𝑓 𝑔 são
50
Capítulo 3. CONTINUIDADE DE FUNÇÕES
contínuas. Se 𝑔(𝑥) ̸= 0 para todo 𝑥 então
𝑓
𝑔
é contínua.
Demonstração: A aplicação ℎ : 𝑋 → R × R definida
por ℎ(𝑥) = 𝑓 (𝑥) × 𝑔(𝑥) é contínua pelo Teorema (3.5). A função
𝑓 + 𝑔 é igual a composição de ℎ com a operção de adição de
R × R → R. E, portanto contínua. Analogamente a subtração,
multiplicação e divisão.
3.4 TOPOLOGIA QUOCIENTE
Esta topologia nasceu da ideia de recortar e colar superfícies, por exemplo, permite transmutar um disco em uma esfera
ou um retângulo em um toro.
Definição 3.9. Sejam 𝑋 e 𝑌 espaços topológicos e 𝑝 : 𝑋 → 𝑌
uma aplicação sobrejetiva. A aplicação 𝑝 é dita quociente se,
para qualquer subconjunto 𝑈 de 𝑌, tem-se que 𝑈 é aberto se, e
somente se 𝑝−1 (𝑈 ) é aberto em 𝑋
Definição 3.10. Dizemos que um conjunto 𝐶 de 𝑋 é saturado
em relação a aplicação 𝑝 se 𝐶 é igual a toda imagem inversa de
um subconjunto de 𝑌 . Desse modo, 𝐶 contém todos os conjuntos
𝑝−1 {𝑦} que intersecta.
Em particular, todos os 𝑓 −1 (𝑈 ) com 𝑈 aberto em 𝑌
então são saturados em 𝑋, bem como suas uniões e interseções
finitas.
Definição 3.11. Uma aplicação 𝑓 : 𝑋 → 𝑌 é dita aberta se
para cada aberto 𝑈 de 𝑋 o conjunto 𝑓 (𝑈 ) é aberto em 𝑌 e é
dita fechada se se para cada fechado 𝑈 de 𝑋 o conjunto 𝑓 (𝑈 ) é
fechado em 𝑌 .
3.4. TOPOLOGIA QUOCIENTE
51
Da própria definição de aplicação quociente temos que,
se uma aplicação é sobrejetora, contínua e aberta (fechada) então
é uma aplicação quociente (aplica abertos saturados em abertos).
No entanto, a recíproca nem sempre é verdadeira.
Exemplo 3.8. Seja 𝑋 = [0, 1] ∪ [2, 3] e 𝑌 = [0, 2] subespaços
⎧ de R, a aplicação 𝑝 : 𝑋 → 𝑌 definida da forma 𝑝(𝑥) =
⎨𝑥,
se 𝑥 ∈ [0, 1]
é sobrejetora, contínua, e fechada. E,
⎩𝑥 − 𝑦, se 𝑥 ∈ [2, 3]
portanto uma aplicação quociente, mas não é uma aplicação
aberta, pois a imagem do [0, 1] conjunto aberto em 𝑋 não é
aberto em 𝑌 . Se 𝐴 = {[0, 1) ∪ [2, 3]} então aplicação 𝑞 : 𝐴 → 𝑌
obtida restringindo 𝑝 em 𝐴, é contínua, sobrejetora, mas não é
aplicação quociente, pois o conjunto [2, 3] é aberto em 𝐴, saturado em relação a 𝑞, mas sua imagem não é aberta em 𝑌 .
Exemplo 3.9. Seja 𝜋1 : R × R → R a projeção na primeira
coordenada, então 𝜋1 é uma aplicação quociente. Pois se 𝑈 × 𝑉
é um elemento base não vazio de R×R então 𝜋1 (𝑈 ×𝑉 ) = 𝑈 que
é aberto em R. Assim, 𝜋1 é contínua, sobrejetora e aberta. Mas
𝜋1 não é uma aplicação fechada pois, seja 𝐶 = {(𝑥, 𝑦) | 𝑥𝑦 = 1}
é fechado e 𝜋1 (𝐶) = R − {0} que é aberto em R.
Definição 3.12. Seja 𝑋 é um espaço e 𝐴 um conjunto, se
𝑝 : 𝑋 → 𝐴 é uma aplicação sobrejetora, então existe exatamente uma topologia 𝒯 em 𝐴 relativa a qual 𝑝 é uma aplicação
quociente, chamada topologia quociente induzida.
De fato 𝑝−1 (∅) = ∅ e 𝑝−1 (𝐴) = 𝑋, pela sobrejetividade
⋃︀
de 𝑝, e também para uma coleção 𝑈𝛼 em 𝐴 se tem 𝑝−1 ( 𝛼 𝑈𝛼 ) =
𝑛
𝑛
⋃︀
⋃︀
⋃︀ −1
(𝑈𝛼 ) e 𝑝−1 ( 𝑈𝑖 ) =
𝑝−1 (𝑈𝑖 ) pela continuidade de 𝑝.
𝛼𝑝
𝑖=1
𝑖=1
satisfazendo as condições de topologia.
52
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Exemplo 3.10.
⎧ A aplicação 𝑝 : R → 𝐴, 𝐴 = {𝑎, 𝑏, 𝑐} definida
⎪
⎪
𝑎, se 𝑥 < 0
⎪
⎨
por 𝑝(𝑥) = 𝑏, se 𝑥 = 0 é uma aplicação quociente. Seus
⎪
⎪
⎪
⎩𝑐, se 𝑥 > 0.
conjuntos saturados são 𝑓 −1 (𝑎), 𝑓 −1 (𝑏), 𝑓 −1 (𝑐), e suas interseções e uniões. De forma que se resumem a (−∞, 0) ∪ (0, ∞),
[0], (−∞, 0) e (0, ∞) que exceto por [0] são aberto e devem ter
imagem aberta na topologia quociente, enquanto que fechados
terão imagem fechada. Daí tem-se que, a topologia quociente
será 𝒯 = {{𝑎, 𝑏}, {𝑏}, {𝑎}, {𝑎, 𝑏, 𝑐}, ∅}
Definição 3.13. Seja 𝑋 um espaço topológico e 𝑋 * uma partição de 𝑋. Seja 𝑝 : 𝑋 → 𝑋 * uma aplicação sobrejetora que leva
cada ponto de 𝑋 para o elemento conjunto de 𝑋 * que o contém.
Chamamos o espaço 𝑋 * de espaço quociente de 𝑋 na topologia
quociente induzida por 𝑝.
Dado 𝑋 * existe uma relação de equivalência para o qual
os elementos de 𝑋 * são classes de equivalência.
Exemplo 3.11. Seja 𝑋 o retângulo [0, 1] × [0, 1]. Definindo a
partição 𝑋 * de 𝑋 como a classe dos pontos interiores, dos pontos
da borda do quadrado que estão sobre os lados paralelos ao eixo
𝑥 e não estão nos cantos do quadrado, os pontos das bordas
paralelas ao eixo 𝑦 que não estão nos cantos do quadrado e o
cunjunto dos cantos do quadrado. Em notação matemática o
conjunto de todos os {(𝑥, 𝑦)} com 0 < 𝑥 < 1 e 0 < 𝑦 < 1 , o
conjunto dos {𝑥 × 0, 𝑥 × 1} com 0 < 𝑥 < 1, {𝑦 × 0, 𝑦 × 1} com 0 <
𝑦 < 1 e o conjunto {0×0, 0×1, 1×0, 1×1}. Nesta topologia uma
vizinhança de um dos cantos do quadrado é também vizinhança
de todos os outros cantos, ou um vazinhança de uma das bordas
3.4. TOPOLOGIA QUOCIENTE
53
paralelas ao eixo das abiscissas, digamos (1, 𝑦), será também
viznhança de (0, 𝑦). Geometricamente esta forma de definir os
abertos no quadrado é como unir os cantos do quadrado e formar
um toro.
Teorema 3.8. Seja 𝑝 : 𝑋 → 𝑌 uma aplicação quociente e 𝐴 um
subespaço de 𝑋 que é saturado em relação a 𝑝 e 𝑞 : 𝐴 → 𝑓 (𝐴)
uma aplicação obtida pela restrição de 𝑝.
1. Se A é aberto ou fechado então 𝑞 é uma aplicação quociente;
2. Se 𝑝 é uma aplicação aberta ou fechada 𝑞 é uma aplicação
quociente.
Demonstração: Note que 𝑞 −1 (𝑉 ) = 𝑝−1 (𝑉 ) pois, se
𝑉 ⊂ 𝐴 e 𝐴 é saturado, 𝑝−1 (𝑉 ) está contido em 𝐴. Ou seja,
𝑝−1 (𝑉 ) e 𝑞 −1 (𝑉 ) são iguais a todos os pontos de 𝐴 que são
aplicados de 𝐴 para 𝑉 . Além disto, 𝑝(𝑈 ∩ 𝐴) = 𝑝(𝑈 ) ∩ 𝐴 se
𝑈 ⊂ 𝑋. A inclusão 𝑝(𝑈 ∩ 𝐴) ⊂ 𝑝(𝑈 ) ∩ 𝐴 sempre vale. Agora
suponha 𝑦 = 𝑝(𝑢) = 𝑝(𝑎), para 𝑢 ∈ 𝑈 e 𝑎 ∈ 𝐴. Como 𝐴 é
saturado, 𝐴 contém 𝑝−1 (𝑝(𝑎)), em particular 𝐴 contém 𝑢, então
𝑦 = 𝑝(𝑢) onde 𝑢 ∈ 𝑈 ∩ 𝐴. Vamos a demonstração do teorema:
(1) Suponha 𝐴 aberto, com 𝑞 −1 aberto em 𝐴. Sabemos
que 𝑞 −1 (𝑉 ) = 𝑝−1 (𝑉 ) com 𝑝−1 (𝑉 ) aberto em 𝑋, então 𝑉 deve
ser aberto em 𝑌 porque 𝑝 é uma aplicação quociente. Em particular 𝑉 é aberto em 𝑝(𝑎).
(2) Agora suponha 𝑝 uma aplicação aberta. Como 𝑞 −1 (𝑉 ) =
𝑝
−1
(𝑉 ) e 𝑝−1 (𝑉 ) é aberto em 𝐴, temos que 𝑝−1 (𝑉 ) = 𝑈 ∩𝐴 para
algum conjunto 𝑈 aberto em 𝑋. Usando a sobrejetividade de 𝑝,
𝑝(𝑝−1 (𝑉 )) = 𝑉 assim, 𝑉 = 𝑝(𝑝−1 (𝑉 )) = 𝑝(𝑢 ∩ 𝐴) = 𝑝(𝑈 ) ∩ 𝑝(𝐴).
54
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Com 𝑝(𝑈 ) aberto em 𝑌 (𝑝 é aplicação quociente). Portanto 𝑉 é
aberto em 𝑝(𝐴).
O fato de que a composição de aplicações quocientes é
uma aplicação quociente vem de 𝑝−1 (𝑞 −1 (𝑈 )) = (𝑞 ∘ 𝑝)−1 (𝑈 ).
Teorema 3.9. Sejam 𝑝 : 𝑋 → 𝑌 uma aplicação quociente, 𝑍
um espaço topológico e 𝑔 : 𝑋 → 𝑌 uma aplicação que é constante
para cada conjunto 𝑝−1 ({𝑦}), 𝑦 ∈ 𝑌 . Então 𝑔 induz uma aplicação 𝑓 : 𝑌 → 𝑍 tal que 𝑓 ∘ 𝑝 = 𝑔 que é contínua se, e somente
se 𝑔 é contínua, e uma aplicação quociente se, e somente se, 𝑓
é aplicação quociente.(Diagrama da Figura (1))
Demonstração: Para cada 𝑦 ∈ 𝑌 , 𝑔(𝑝−1 ({𝑦})) é um
conjunto unitário de 𝑍. Definindo 𝑓 (𝑦) como este ponto, a aplicação 𝑓 : 𝑌 → 𝑍 tal que para cada 𝑥 ∈ 𝑋 se tenha 𝑓 ((𝑝(𝑥))) =
𝑔(𝑥). Se 𝑔 é contínua, então 𝑔 = 𝑓 ∘ 𝑝 é contínua. Se 𝑔 é contínua
então dado um conjunto aberto 𝑉 de 𝑍, 𝑔 1 (𝑉 ) é aberto em 𝑋,
mas 𝑔 −1 (𝑉 ) = 𝑝−1 (𝑓 −1 (𝑉 )) como 𝑝 é aplicação quociente, temos
que 𝑓 −1 (𝑉 ) é aberto em Y.𝑓 é contínua.
Para a segunda afirmação, suponha 𝑓 uma aplicação
quociente. Como 𝑔 é composta de duas aplicações quocientes
será uma aplicação quociente. Inversamente, se 𝑔 é uma aplicação quociente então 𝑔 é sobrejetora e 𝑓 será uma aplicação
sobrejetora. Seja 𝑉 um subconjunto de 𝑍, 𝑝−1 (𝑓 −1 (𝑉 )) é aberto
em 𝑋, pois 𝑝 é contínua. Como 𝑝−1 (𝑓 −1 (𝑉 )) = 𝑔 −1 (𝑉 ), 𝑉 é
aberto em 𝑍. 𝑔 é uma aplicação quociente.
Teorema 3.10. Seja 𝑔 : 𝑋 → 𝑍 uma aplicação sobrejetora e
𝑋 * o espaço quociente da forma 𝑋 * = {𝑔 −1 ({𝑧})|𝑧 ∈ 𝑍}. Então
1. A aplicação 𝑔 induz a uma aplicação bijetora e contínua
3.5. ESPAÇOS CONEXOS
55
X
p
Y
g
f
Z
Figura 1 – Diagrama de representação do Teorema (3.9)
𝑓 : 𝑋 * → 𝑍 que é um homeomorfismo se, e somente se, 𝑔
é aplicação quociente;
2. Se 𝑍 é um espaço de Hausdorff, então 𝑋 * também será um
espaço de Hausdorff.
Demonstração:
(1) Pelo Teorema (3.9) 𝑔 induz a uma aplicação contínua
*
𝑓 : 𝑋 → 𝑍, 𝑓 é bijetora. Suponha 𝑓 um homeomorfismo. Então
ambos, 𝑓 e a aplicação 𝑝 : 𝑋 → 𝑋 * são aplicações quocientes
e assim, 𝑔 = 𝑓 (𝑝(𝑥)) é uma aplicação quociente. Inversamente
suponha 𝑔 aplicação quociente, pelo Teorema (3.9) 𝑓 é aplicação
quociente e portanto homeomorfismo.
(2) Supondo 𝑍 um espaço de Hausdorff, dados pontos
distintos de 𝑋 * , suas imagens sob 𝑓 são distintas, tomando vizinhanças disjuntas 𝑈 e 𝑉 destes pontos, 𝑓 −1 (𝑈 ) e 𝑓 −1 (𝑉 ) vizinhanças disjuntas entre dois pontos de 𝑥* .
3.5 ESPAÇOS CONEXOS
Os teoremas do valor intermediário, da continuidade uniforme, e do valor médio são alguns dos teoremas que necessitam
56
Capítulo 3. CONTINUIDADE DE FUNÇÕES
X
p
X∗
g
f
Z
Figura 2 – Diagrama de representação do Teorema (3.10)
da definição de conexidade e compacidade para serem provados.
Uma vez provados podemos utilizar diversas propriedades para
as homotopias mais adiante, por exemplo, para obter inversas.
Definição 3.14. Uma separação do espaço topológico 𝑋 é um
par de subconjuntos 𝑈 e 𝑉 disjuntos e não vazios abertos em 𝑋
cuja união é igual a 𝑋. Se esta separação não existe o espaço 𝑋
é dito conexo.
Um espaço 𝑋 é conexo se, e somente se, os únicos subconjuntos de 𝑋 que são, ao mesmo tempo, abertos e fechados
são ∅ e 𝑋. De fato, se 𝐴 é um subconjunto de 𝑋 não vazio e
aberto e fechado ao mesmo tempo, então 𝑈 = 𝐴 e 𝑉 = 𝑋 − 𝐴
são uma separação de 𝑋. Por outro lado, se 𝑈 e 𝑉 são abertos
e formam uma separação de 𝑋, então 𝑈 e 𝑉 são não vazios e
portanto diferentes de 𝑋. Assim 𝑈 = 𝑋 − 𝑉 é fechado e aberto
ao mesmo tempo.
A conexidade é uma propriedade topológica. Logo, se 𝑋
é conexo, todo espaço homeomorfo a ele será conexo.
Outra forma de definir um conjunto conexo é dado pelo
Lema 3.3. Se 𝑌 é um subespaço de 𝑋, uma separação de 𝑌 é
um par de conjuntos disjuntos não vazios 𝐴 e 𝐵 cuja união é
3.5. ESPAÇOS CONEXOS
57
𝑌 , nenhum dos quais contém ponto de acumulação do outro. O
conjunto 𝑌 é conexo se não existe separação de 𝑌 .
Demonstração: O conjunto 𝑌 é subespaço de 𝑋 assim, 𝐴¯ ∩ 𝑌 é ó fecho de 𝐴 em 𝑌 (𝐴¯ é o fecho de 𝐴 em 𝑋). Se
𝐴 e 𝐵 são uma separação de 𝑌 (𝐴, 𝐵 ⊂ 𝑌 ) ambos são abertos e
fechados em 𝑌 , 𝐴 = 𝐴¯ ∩ 𝑌 e ainda, ∅ = 𝐵 ∩ 𝐴 = (𝐴¯ ∩ 𝑌 ) ∩ 𝐵 =
𝐴¯ ∩ (𝑌 ∩ 𝐵) = 𝐴¯ ∩ 𝐵. Mas, 𝐴¯ é a união dos pontos de 𝐴 e seus
pontos de acumulação, o que implica que 𝐵 não possui nenhum
ponto de acumulação de 𝐴. De forma análoga se mostra que 𝐴
não possui pontos de acumulação de 𝐵.
Agora, suponha 𝐴 e 𝐵 disjuntos não vazios tais que 𝐴 ∪
𝐵 = 𝑌 e nenhum contém pontos de acumulação do outro. Então,
¯
¯ ∩𝐴 = ∅, o que implica que 𝐴∩𝑌
¯
¯ ∩𝑌 = 𝐵,
𝐴∩𝐵
=∅e𝐵
=𝐴e𝐵
ou seja, 𝐴 e 𝐵 são fechados em 𝑌 . Como 𝐴 = 𝑌 −𝐵 e 𝐵 = 𝑌 −𝐴,
𝐴 e 𝐵 são abertos e fechados em 𝑌 .
Na topologia discreta todo conjunto é aberto e fechado,
então todo conjunto com a topologia discreta não é conexo. E,
todo conjunto com a topologia indiscreta é conexo.
Exemplo 3.12. Seja 𝑌 = [−1, 0) ∪ (0, 1] um subespaço de R.O
espaço 𝑌 não é conexo 𝑈 = [−1, 0) e 𝑉 = (0, 1] são uma separação de 𝑌
Exemplo 3.13. O conjunto dos racionais Q não é conexo, pois
para quaisquer dois racionais 𝑝 e 𝑞, podemos tomar um irracional
𝑧 ∈ R − Q de forma que 𝑝 < 𝑧 < 𝑞. Assim Q = ((−∞, 𝑧) ∩ Q) ∪
((𝑧, ∞) ∩ Q).
Lema 3.4. Se 𝐶 e 𝐷 formam uma separação de 𝑋 e se 𝑌 é
subespaço conexo de 𝑋 então 𝑌 está inteiramente contido em 𝐶
58
Capítulo 3. CONTINUIDADE DE FUNÇÕES
ou inteiramente contido em 𝐷
Demonstração: Se 𝑌 é subespaço de 𝑋, logo 𝑌 ∩ 𝐶 e
𝑌 ∩ 𝐷 são abertos e fechados e disjuntos em 𝑌 (pela topologia
do subespaço),e sua união é 𝑌 . Como 𝑌 é conexo 𝑌 ∩ 𝐶 = ∅ e
𝑌 ∩𝐷 = 𝑌 ou 𝑌 ∩𝐷 = ∅ e 𝑌 ∩𝐶 = 𝑌 . Em ambos os casos 𝑌 está
inteiramente contido em apenas um dos conjuntos da separação.
Teorema 3.11. A união de uma coleção de subespaços conexos
que tem um elemento em comum e conexo.
Demonstração: Seja {𝐴𝛼 } uma coleção de subespaços
⋃︀
conexos de 𝑋 e 𝑝 um elemento de ∩𝐴𝛼 . Suponha 𝑌 = 𝛼 𝐴𝛼 não
conexo, e seja, 𝑌 = 𝐶 ∪ 𝐷 uma separação de 𝑌 , então 𝑝 pertence
a apenas um destes conjuntos. Suponha 𝑝 ∈ 𝐶, para cada 𝛼, 𝐴𝛼
contém 𝑝 e é conex, isso pelo lema anterior implica que 𝐴𝛼 ⊂ 𝐶
e não está contido em 𝐷. Assim, ∪𝐴𝛼 ⊂ 𝐶, contradizendo o fato
de que 𝐷 ̸= ∅. E portanto 𝑌 é conexo.
Teorema 3.12. Se 𝐴 é um subespaço conexo de 𝑋 com 𝐴 ⊂
𝐵 ⊂ 𝐴¯ então 𝐵 é conexo.
Demonstração: Suponha 𝐵 não conexo, então 𝐵 =
𝐶 ∪ 𝐷 é uma separação de 𝐵 com 𝐴 subconjunto de 𝐵. Assim, 𝐴
está contido em apenas um dos conjuntos da separação, suponha
¯ Como 𝐷 não possui pontos de acumulação
𝐴 ⊂ 𝐶 então 𝐴¯ ⊂ 𝐵.
¯ ou seja, 𝐵 não pode
de 𝐶 então, 𝐶¯ ∩ 𝐷 = ∅ mas, 𝐵 ⊂ 𝐴¯ ⊂ 𝐶,
intersectar 𝐷. Logo 𝐷 é vazio.
Teorema 3.13. A imagem de um espaço conexo sob uma aplicação contínua é conexa.
3.5. ESPAÇOS CONEXOS
59
Demonstração: Seja 𝑓 : 𝑋 → 𝑌 uma aplicação contínua e 𝑋 conexo. A aplicação obtida de 𝑓 restringindo a imagem
para 𝑓 (𝑋) também é contínua. Tomando 𝑔 : 𝑋 → 𝑍, 𝑍 = 𝑓 (𝑋),
suponha 𝑍 = 𝐴∪𝐵 uma separação de 𝑍. Então 𝑔 −1 (𝐴) e 𝑔 −1 (𝐵)
são abertos (𝑔 é contínua), disjuntos (pois do contrário haveria
um elemento em 𝑋 cuja imagem não é única, contrariando a
definição de aplicação), não vazios (𝑔 é sobrejetora ) e sua união
é 𝑋.Assim, 𝑔 −1 (𝐴) e 𝑔 −1 (𝐵) são uma separação de 𝑋, contrariando que 𝑋 é conexo.
Teorema 3.14. Um produto cartesiano finito de espaços conexos é conexo.
Demonstração:
Primeiro vamos provar para o pro-
duto entre dois espaços conexos 𝑋 × 𝑌 . Tome um ponto arbitrário 𝑎 × 𝑏 pertencente a 𝑋 × 𝑌 . O conjunto 𝑋 × 𝑏 é conexo
por ser homeomorfo a 𝑋 (basta tomar ℎ : 𝑋 → 𝑋 × 𝑏 tal que
ℎ(𝑥) = 𝑥 × 𝑏 para todo 𝑥 ∈ 𝑋). Da mesma forma 𝑥 × 𝑌 é conexo
e homeomorfo a 𝑌 .
Seja 𝑇𝑥 = (𝑋 × 𝑏) ∪ (𝑥 × 𝑌 ), 𝑇𝑥 é conexo pois se trata da
união entre dois espaços conexos com o ponto 𝑥 × 𝑏 em comum.
⋃︀
Da mesma forma
𝑇𝑥 = 𝑋 × 𝑌 é conexo por ser a união de
𝑥∈𝑋
espaços conexos com o ponto 𝑎 × 𝑏 em comum. para mostrar
a união finita basta notar que 𝑋1 × . . . × 𝑋𝑛 é homeomorfo a
(𝑋1 × . . . × 𝑋𝑛−1 ) × 𝑋𝑛 .
Definição 3.15. Um conjunto ordenado 𝐿 com mais de um
elemento é dito linearmente contínuo se:
1. 𝐿 possui a propriedade do supremo (todo subconjunto limitado superiormente tem supremo);
60
Capítulo 3. CONTINUIDADE DE FUNÇÕES
2. Se 𝑥 < 𝑦 então existe 𝑧 tal que 𝑥 < 𝑧 < 𝑦.
O fato de um conjunto ordenado ser limitado não implica
em possuir a propriedade do supremo. Por exemplo o conjunto
𝑋 = {𝑥 ∈ Q|𝑥2 < 2} não possui supremo, pois não existe 𝑥 ∈ Q
√
√
menor que 2 tal que para todo 𝑦 ∈ 𝑋 se tenha 𝑦 < 𝑥 < 2.
Exemplo 3.14. Os intervalos da reta real são linearmente contínuos.
Teorema 3.15. Se 𝐿 é um conjunto linearmente contínuo na
topologia da ordem, então 𝐿 é conexo.
Demonstração:
Suponha 𝐴 ∪ 𝐵 uma separação em
𝑌 . Tome 𝑎 ∈ 𝐴 e 𝑏 ∈ 𝐵 com 𝑎 < 𝑏. Desta forma, o intervalo
[𝑎, 𝑏] de pontos de 𝐿 está contido em 𝑌 . Mas [𝑎, 𝑏] é a união dos
conjuntos 𝐴0 = 𝐴 ∩ [𝑎, 𝑏] e 𝐵0 = 𝐵 ∩ [𝑎, 𝑏] que são disjuntos e
abertos na topologia do subespaço (que é a mesma de ordem).
𝐴0 e 𝐵0 são não vazios, pois 𝑎 ∈ 𝐴0 e 𝑏 ∈ 𝐵0 . Assim, 𝐴0 e 𝐵0
são uma separação de [𝑎, 𝑏]. Seja 𝑐 = 𝑠𝑢𝑝𝐴0 . Suponha 𝑐 ∈ 𝐵0
então 𝑐 ̸= 𝑎. 𝑐 = 𝑏 ou 𝑎 < 𝑐 < 𝑏. Como 𝐵0 é aberto em [𝑎, 𝑏]
existe algum intervalo da forma (𝑑, 𝑐] contido em 𝐵0 .
No caso de 𝑐 = 𝑏 é uma contradição ao fato de 𝑐 ser o
supremo de 𝐴0 já que, 𝑑 < 𝑏.
No caso de 𝑐 < 𝑏 então (𝑐, 𝑏] não intersecta 𝐴0 . O que
contradiz o fato de 𝑐 ser supremo de 𝐴0 .
Agora suponha 𝑐 ∈ 𝐴. Então 𝑐 ̸= 𝑏. 𝑐 = 𝑎 ou 𝑎 < 𝑐 < 𝑏.
𝐴0 é aberto, então existe um intervalo da forma [𝑐, 𝑒) contido
em 𝐴0 . Tomando 𝑧 ∈ 𝐿 tal que 𝑐 < 𝑧 < 𝑒 com 𝑧 ∈ 𝐴0 , com 𝑐
supremo de 𝐴0 , contradição.
3.5. ESPAÇOS CONEXOS
61
Exemplo 3.15. Todo intervalo da reta real R é conexo pois,
satisfaz as hipóteses do teorema acima.
Exemplo 3.16. O conjunto 𝑋 × [0, 1] com 𝑋 espaço topológico ordenado é linearmente contínua na topologia da ordem do
dicionário.
Para mostrar que R é conexo, usamos a propriedade da
convexidade, ou seja, ligamos dois pontos por uma linha reta.
Esta propriedade, tão útil em R, pode ser estendida para qualquer espaço topológico na forma da
Definição 3.16. Dados dois pontos 𝑥, 𝑦 ∈ 𝑋, um caminho em
𝑋 de 𝑥 para 𝑦 é uma aplicação contínua 𝑓 : [𝑎, 𝑏] → 𝑋 tal que
𝑓 (𝑎) = 𝑥 e 𝑓 (𝑏) = 𝑦. Um espaço 𝑋 é dito conexo por caminhos
se para todo par de pontos de 𝑋 existe um caminho entre eles.
Exemplo 3.17. A reta R é conexa pois, para quaisquer dois
pontos dela é possível ligá-los pela própria reta.
É imediato que todo conjunto conexo por caminhos é
conexo pois, do contrário tomando 𝑋 = 𝐴 ∪ 𝐵 uma separação
de 𝑋, se existe um caminho entre pontos 𝑎 ∈ 𝐴 e 𝑏 ∈ 𝐵 haveria
uma aplicação contínua cuja imagem não está contida em apenas
um dos conjuntos da separação, uma contradição a continuidade
do caminho.
Exemplo 3.18. A bola aberta 𝐵 𝑛 em R onde 𝐵 𝑛 = {𝑥| ||𝑥|| ≤
√︀
1} é conexa por caminhos, onde ||𝑥|| = 𝑥21 + . . . + 𝑥2𝑛 . De fato,
dados 𝑥, 𝑦 ∈ 𝐵 𝑛 , o caminho da linha reta 𝑓 : [0, 1] → R definido
por 𝑓 (𝑡) = (1 − 𝑡)𝑥 + 𝑡𝑦 está contido em 𝐵 𝑛 , ou seja, ||𝑓 (𝑡)|| ≤
(1 − 𝑡)||𝑥|| + 𝑡||𝑦|| ≤ 1.
62
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Quando definirmos homotopia da linha reta, provaremos
formalmente que esta propriedade se estende a qualquer bola
aberta 𝐵𝑑 (𝑥, 𝜖) e bola fechada 𝐵¯𝑑 (𝑥, 𝜖).
Exemplo 3.19. O espaço perfurado definido por R𝑛 −0 é conexo
por caminhos se 𝑛 > 1, mas se 𝑛 = 1 temos que R − {0} =
(−∞, 0) ∪ (0, +∞) não é conexo por caminhos.
Exemplo 3.20. A esfera unitária 𝑆 𝑛−1 em R da forma 𝑆 𝑛−1 =
{𝑥|
||𝑥|| = 1} é conexa por caminhos se 𝑛 > 1. Pois, 𝑔 : R𝑛 −
0 → definida por 𝑔(𝑥) =
𝑥
||𝑥||
é contínua, sobrejetora e conexo
pois é a imagem de uma aplicação contínua em um espaço conexo
por caminhos.
Um espaço ser conexo por caminhos implica em ser conexo, no entanto a recíproca nem sempre vale, isto está exemplificado no
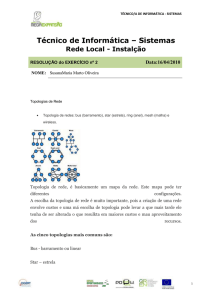
Exemplo 3.21. Seja 𝑆 = {𝑥×𝑠𝑒𝑛( 𝑥1 )| 0 < 𝑥 ≤ 1}. 𝑆 é conexo,
pois é a imagem sob uma aplicação contínua do espaço conexo
(0, 1]. Além disto, 𝑆¯ também é conexo, basta tomar 𝑆 ⊂ 𝑆 ⊂ 𝑆¯ e
aplicar o Teorema (3.12). O conjunto 𝑆¯ é chamado de topologia
da curva do seno (Figura 3).
1
0
Figura 3 – Curva do seno.
3.6. CONEXIDADE LOCAL
63
A curva do seno 𝑆¯ é a união de 𝑆 com o intervalo vertical
0 × [−1, 1]. Graficamente, se vê que para 𝑥 = 0 a função 𝑠𝑒𝑛( 𝑥1 )
não está definida, e portanto não há caminho que una 𝑆 ao eixo
das ordenadas. A demonstração formal deste exemplo está em
Munkres (2000, p. 157).
3.6 CONEXIDADE LOCAL
Dado um espaço topológico 𝑋, existe uma forma natural
de quebrá-lo em pedaços conexos ou conexos por caminho, que
é quebrá-lo em componentes conexas ou componentes conexas
por caminho.
Definição 3.17. Dado um espaço 𝑋, defina uma relação de
equivalência em 𝑋 da forma 𝑥 ∼ 𝑦 se existe um subespaço conexo de 𝑋 contendo ambos 𝑥 e 𝑦. As classes de equivalência
assim definidas são chamadas componentes ou componentes
conexas de 𝑋.
Pela relação definida 𝑥 ∼ 𝑥 e se 𝑥 ∼ 𝑦 então 𝑦 ∼ 𝑥.
Agora, se 𝐴 é um subespaço conexo contendo 𝑥, 𝑦 ∈ 𝑋 (𝑥 ∼ 𝑦)
e se 𝐵 é um subespaço contendo 𝑦, 𝑧 ∈ 𝑋 (𝑦 ∼ 𝑧), então 𝐴 ∪ 𝐵
é conexo (união de espaços conexos com um ponto em comum)
e contém 𝑥 e 𝑧 assim, 𝑥 ∼ 𝑧.
É imediato que um espaço conexo possui uma única
classe de equivalência (única componente conexa). Além disto,
as componentes de um espaço 𝑋 são subespaços conexos e disjuntos de 𝑋 cuja união é 𝑋
Teorema 3.16. Todo subespaço não vazio de um espaço conexo
𝑋 intersecta apenas uma componente de 𝑋.
64
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Demonstração: Seja 𝐴 subespaço conexo de 𝑋 que
intersecta as componentes conexas 𝐶1 e 𝐶2 de 𝑋 nos pontos 𝑥1
e 𝑥2 respectivamente, então pela conexidade de 𝐴, 𝑥1 ∼ 𝑥2 , logo
𝐶1 = 𝐶2 pois, para todo 𝑥 ∈ 𝐶 temos 𝑥 ∼ 𝑥1 e por transitividade
𝑥 ∼ 𝑥2 .
Contrariamente escolha 𝑥0 ∈ 𝐶, para cada 𝑥 ∈ 𝐶 temos
que 𝑥0 𝑥. Então, existe um subespaço conexo 𝐴𝑥 contendo 𝑥0 e
𝑥. Pelo já provado na primeira parte da demonstração 𝐴𝑥 ∈ 𝐶 e
⋃︀
portanto 𝐶 =
𝐴𝑥 . Desde que 𝐴𝑥 é conexo e 𝑥0 é comum em
𝑥∈𝐶
𝐴𝑥 para todo 𝑥 ∈ 𝐶, então 𝐶 é conexo.
Definição 3.18. Dado um espaço 𝑋, defina uma relação de
equivalência em 𝑋 da forma 𝑥 ∼ 𝑦 se existe um caminho de 𝑥
para 𝑦. As classes de equivalência assim definidas são chamadas
componentes por caminho ou componentes conexas por
caminho de 𝑋.
Demonstração:
Definindo 𝑓 : [𝑎, 𝑏] → 𝑋 tal que
𝑓 (𝑡) = 𝑥 para todo 𝑡 temos que 𝑥 𝑥 para todo 𝑥 ∈ 𝑋.
Definindo 𝑔 : [0, 1] → 𝑋 da forma 𝑔(𝑡) = 𝑓 (1 − 𝑡) temos
que se 𝑥 𝑦 então 𝑦 𝑥 para todo 𝑥 e 𝑦 ∈ 𝑋.
Definindo 𝑓 : [0, 1] → 𝑋 um caminho entre 𝑥 e 𝑦 e
𝑔 : [1, 2] → 𝑋 um caminho entre 𝑦 e 𝑧, pelo Teorema da colagem
a aplicação ℎ : [0, 2] → 𝑋 é um caminho de 𝑥 para 𝑧.
Como todos os intervalos fechados em R são homeomorfos entre si. Esta relação de equivalência se aplica a qualquer
intervalo fechado de R
Note que cada componente conexa por caminhos de um
subespaço de 𝑋 são subespaços disjuntos de 𝑋, conexos por
3.6. CONEXIDADE LOCAL
65
caminho e cada subespaço de conexo não vazio de 𝑋 intersecta
apenas uma componente conexa por caminhos.
Muitas vezes basta conhecer as características de um
espaço próximo a um ponto específico. Esta noção é dada pela
Definição 3.19. Um espaço 𝑋 é dito localmente conexo se
para toda vizinhança 𝑈 de 𝑥, existe uma vizinhança conexa 𝑉
de 𝑥 contida em 𝑈 . Se 𝑋 é localmente conexo em todos os seus
pontos, 𝑋 é dito localmente conexo. Analogamente, 𝑋 é dito
localmente conexo por caminhos em 𝑥 se para toda vizinhança 𝑈
de 𝑥 existe uma vizinhança 𝑉 de 𝑥 conexa por caminhos contida
em 𝑈 . Se 𝑋 é localmente conexo por caminhos em cada um de
seus pontos, então 𝑋 é dito localmente conexo por caminhos.
Exemplo 3.22. O conjunto 𝑋 das retas 𝑥 =
1
𝑛
em R2 união
com os eixos coordenados é um conjunto conexo, e conexo por
caminhos. Mas, tomando a vizinhança 𝐵𝑑 (1, 𝜖), para todo 𝜖 < 1
o subespaço 𝑋 ∩𝐵𝑑 não é conexo, e portanto 𝑋 não é localmente
conexo
Exemplo 3.23. A curva do seno 𝑆¯ (Exemplo 3.21) não é localmente conexa, pois tomando 𝐵𝑑 ( 21 , 𝜖), para todo 𝜖 < 14 o
subespaço 𝑆¯ ∩ 𝐵𝑑 não é conexo, e portanto 𝑆¯ não é localmente
conexo, embora seja conexo.
Exemplo 3.24. O subespaço de R dado por [−1, 0) ∪ (0, 1] não
é conexo mas é localmente conexo.
Exemplo 3.25. O conjunto dos racionais Q não é nem conexo,
nem localmente conexo.
66
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Teorema 3.17. Um espaço 𝑋 é localmente conexo se, e somente
se, para todo aberto 𝑈 de 𝑋, toda componente de 𝑈 é aberto em
𝑋.
Demonstração:
Seja 𝑈 um aberto do conjunto localmente conexo 𝑋 e 𝐶
uma componente de 𝑈 . Se 𝑋 é um ponto de 𝐶, podemos escolher
uma vizinhança conexa 𝑉 de 𝑋 tal que 𝑉 ⊂ 𝑈 . Como 𝑉 é
conexo, está contido em 𝐶. Portanto 𝐶 é a união das vizinhanças
conexas de 𝑥 ∈ 𝐶 ⊂ 𝑈 que é aberto em 𝑋.
Por outro lado, suponha as componentes dos conjuntos
abertos de 𝑋 também abertas em 𝑋. dado 𝑥 ∈ 𝑋, e uma vizinhança 𝑈 de 𝑥. Seja 𝐶 componente de 𝑈 contendo 𝑥. Tome 𝐶
como vizinhança conexa de 𝑥 e então 𝑋 será localmente conexo.
Analogamente se define um espaço 𝑋 como localmente
conexo por caminhos se, e somente se, para todo aberto 𝑈 de 𝑋,
cada componente por caminho é aberto em 𝑋.
Teorema 3.18. Se 𝑋 é espaço topológico, cada componente por
caminho de 𝑋 está contido em uma única componente de 𝑋. Se
𝑋 é localmente conexo por caminhos, então as componentes por
caminho e as componentes conexas são as mesmas.
Demonstração: Cada componente conexa por caminho de 𝑋 está contida em uma componente de 𝑋.
Sejam 𝐶 uma componente de 𝑋, 𝑥 um ponto de 𝐶 e
𝑃 um componente por caminhos de 𝑋 que contém 𝑥. Pela conexidade de 𝑃 , 𝑃 ⊂ 𝐶. Suponha 𝑃 ( 𝐶. Tome 𝑄 a união de
todas as componentes por caminho de 𝑋 que são diferentes de 𝑃
3.7. ESPAÇOS COMPACTOS
67
e intersectam 𝐶. Como todas as componentes por caminho que
intersectam 𝐶 estão em 𝐶 segue que 𝐶 = 𝑃 ∪ 𝑄. 𝑋 é localmente
conexo por caminhos, assim toda componente por caminho de
𝑋 é um aberto em 𝑋. Portanto as componentes conexas por
caminho 𝑃 e 𝑄 são abertos em 𝑋, disjuntos e não vazios, o que
constitui uma separação, contradizendo o fato de 𝐶 ser conexo.
3.7 ESPAÇOS COMPACTOS
O intervalo fechado na reta [𝑎, 𝑏] é de extrema importância nas definições de homotopia. No entanto, sua generalização
precisou ser reformulada várias vezes até chegar ao que hoje definimos como compacidade.
Definição 3.20. Uma coleção 𝒞 de subconjuntos de um espaço
topológico é dito ser uma cobertura de 𝑋 se a união dos elementos de 𝒞 é igual a 𝑋. Se os elementos de 𝒞 são abertos em
𝑋, dizemos que 𝒞 é uma cobertura aberta de 𝑋.
Definição 3.21. Um espaço 𝑋 é dito ser compacto se toda
cobertura aberta 𝒞 de 𝑋 contém uma subcoleção finita que cobre
𝑋.
Em outras palavras, todo espaço compacto admite subcobertura finita. Desta definição resulta que, todo conjunto finito
é compacto e os intervalos semiabertos não são compactos.
A definição de compacidade apresentada parece muito
diferente da definição apresentada em análise real. Definir um
intervalo compacto como limitado e fechado se aplica no caso de
um conjunto métrico, o que será provado mais adiante.
68
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Lema 3.5. Seja 𝑌 um subespaço de 𝑋. Então, 𝑌 é compacto
se, e somente se, toda cobertura de 𝑌 de abertos em 𝑋 contém
uma subcoleção finita que cobre 𝑌 .
Demonstração: Suponha 𝑌 compacto e 𝒜 = {𝐴𝛼∈𝐽 }
uma cobertura de abertos em 𝑋. A subcoleção {𝒜𝛼 } será uma
cobertura de abertos em 𝑌 . Usando a compacidade de 𝑌 , a
subcoleção finita {𝐴𝛼1 ∩ 𝑌, . . . 𝐴𝛼𝑛 ∩ 𝑌 } cobre 𝑌 . Assim, existe
{𝐴𝛼1 , . . . 𝐴𝛼𝑛 } é uma subcoleção de 𝒜 que cobre 𝑌 .
Agora, para mostrar que a condição é suficiente, tome
′
𝒜 = {𝐴′𝛼 } uma cobertura aberta de 𝑌. Para cada 𝛼 escolha 𝐴𝛼
tal que 𝐴′𝛼 = 𝐴𝛼 ∩ 𝑌 . Assim, {𝐴′𝛼 } é aberto em 𝑋 e portanto,
𝒜 = {𝐴𝛼 } é uma cobertura de 𝑌 por abertos de 𝑋 e esta coleção possui, por hipótese, subcoleção finita que cobre 𝑌 . Seja esta
subcoleção {𝐴𝛼1 , . . . , 𝐴𝛼1 } então, {𝐴′𝛼1 , . . . , 𝐴′𝛼1 } é uma subcoleção de 𝐴′ que cobre 𝑌 .
Teorema 3.19. Todo subespaço fechado de um espaço compacto
é compacto.
Demonstração: Seja 𝑌 um subespaço fechado de um
espaço compacto 𝑋. Dado 𝒜 cobertura de 𝑌 formada por abertos
de 𝑋, podemos obter ℬ uma cobertura de 𝑋 formada pela união
de 𝒜 ao conjunto aberto 𝑋 −𝑌 . Ou seja, ℬ = 𝒜∪{𝑋 −𝑌 }. Como
𝑋 é compacto podemos obter ℬ ′ ⊂ ℬ finito como cobertura de 𝑋.
O conjunto 𝑋 − 𝑌 não contém nenhum elemento de 𝒜, portanto
ℬ ′ = {𝐴1 , . . . , 𝐴𝑛 , {𝑋 − 𝑌 }} é uma cobertura finita de 𝑋 onde
{𝐴1 , . . . , 𝐴𝑛 } é uma cobertura finita para 𝑌 .
Teorema 3.20. A imagem de um espaço compacto sob uma
aplicação contínua é compacto.
3.7. ESPAÇOS COMPACTOS
Demonstração:
69
Sejam 𝑓 : 𝑋 → 𝑌 uma aplicação
contínua, 𝑋 compacto e 𝒜 uma cobertura de 𝑓 (𝑋) dados por
abertos de 𝑌 . A coleção {𝑓 −1 (𝐴)|𝐴 ∈ 𝒜} é uma cobertura de 𝑋 é
uma cobertura de abertos (pela continuidade de 𝑓 ) de 𝑋. Se 𝑋 é
compacto uma quantidade finita de abertos 𝑓 −1 (𝐴1 ), . . . , 𝑓 −1 (𝐴𝑛 )
cobre 𝑋. Portanto, os conjuntos 𝐴1 , . . . , 𝐴𝑛 cobrem𝑓 (𝑋)
O teorema acima será muito útil para verificar homeomorfismos em conjuntos compactos.
Lema 3.6. (Lema do tubo) Considere o espaço produto 𝑋 ×𝑌 ,
onde 𝑌 é compacto. Se 𝑁 é um aberto de 𝑋 × 𝑌 contendo a
fatia 𝑥0 × 𝑌 de 𝑋 × 𝑌 , então 𝑁 contém algum tubo 𝑊 × 𝑌 sobre
𝑥0 × 𝑌 , onde 𝑊 é uma vizinhança de 𝑥0 em 𝑋. Ou seja, existe
uma vizinhança 𝑊 de 𝑥0 tal que 𝑊 × 𝑌 está contido em 𝑁 .
Demonstração: O conjunto 𝑥0 × 𝑌 é homeomorfo a
𝑌 , logo é compacto. Assim, podemos tomar 𝑈1 × 𝑉1 , . . . , 𝑈𝑛 × 𝑉𝑛
uma cobertura finita para 𝑥0 × 𝑌 . defina 𝑊 = 𝑈1 . . . 𝑈𝑛 , 𝑊 é
aberto em 𝑋 e contém 𝑥0 , pois cada 𝑈1 × 𝑉1 intersecta 𝑥0 × 𝑌 .
Além disto, a cobertura para 𝑊 × 𝑌 . Seja (𝑥, 𝑦) um ponto de
𝑊 × 𝑌 , considere o ponto 𝑥0 × 𝑌 da fatia 𝑥0 × 𝑌 tendo a mesma
coordenada𝑦 deste ponto. 𝑥0 × 𝑦 pertence a 𝑈𝑖 × 𝑉𝑖 para algum
𝑖 e portanto 𝑦 ∈ 𝑉𝑖 . Mas 𝑥 ∈ 𝑈𝑗 para todo 𝑗, pois 𝑥 ∈ 𝑊 . Ou
seja, (𝑥, 𝑦) ∈ 𝑈𝑖 ×𝑉𝑖 como desejado. Assim, se todos os conjuntos
𝑈𝑖 × 𝑉𝑖 estão contidos em 𝑁 , e cobrem 𝑊 × 𝑌 , o tubo 𝑊 × 𝑌
também está contido em 𝑁 .
Teorema 3.21. O produto de uma quantidade finita de espaços
compactos é compacto.
Demonstração: Sejam 𝑋 e 𝑌 espaços compactos e 𝒜
70
Capítulo 3. CONTINUIDADE DE FUNÇÕES
uma cobertura aberta de 𝑋 × 𝑌 . dado 𝑥0 ∈ 𝑋, a fatia 𝑥0 × 𝑌 é
compacta e portanto admite a cobertura finita 𝐴1 , . . . , 𝐴𝑚 , cuja
união é 𝑁 = 𝑎1 ∪ . . . ∪ 𝐴𝑛 é um aberto contendo 𝑥0 × 𝑌 . Pelo
Lema do tubo, N contém um tubo 𝑊 × 𝑌 sobre 𝑥0 × 𝑌 , onde
𝑊 é aberto em 𝑋. Então 𝑊 × 𝑌 é coberto por uma quantidade
finita 𝐴1 , . . . , 𝐴𝑚 de elementos de 𝒜. Assim, para cada 𝑥 ∈ 𝑋
podemos escolher uma vizinhança 𝑊𝑥 de 𝑥 tal que o tubo 𝑊𝑥 ×𝑌
é compacto. A coleção de todas as vizinhanças 𝑊𝑥 é um aberto
que cobre 𝑋. portanto se 𝑋 é compacto, existe uma subcoleção
finita 𝑊1 , . . . , 𝑊𝑘 que é uma cobertura para 𝑋. Os tubos 𝑊1 ×
𝑌, . . . , 𝑊𝑘 × 𝑌 é todo 𝑋 × 𝑌 e portanto uma cobertura finita de
𝑋 × 𝑌 . Por indução se prova para produto finito.
Se 𝑌 não é compacto, o lema do tubo não necessariamente é válido como esta mostrado no exemplo a seguir.
Exemplo 3.26. Seja 𝑌 o eixo 𝑦 em R2 e 𝑁 = {(𝑥, 𝑦) | |𝑥| <
1
𝑦 2 +1 }.
O conjunto 𝑁 é aberto e contém o conjunto 0 × R mas
não contém tubo sobre 0 × R pois, 0 × R é homeomorfo a R que
não é compacto.
Definição 3.22. Uma coleção 𝒞 de subconjuntos de 𝑋 é dita ter
a propriedade da interseção finita se para toda subcoleção
finita {𝐶1 , . . . , 𝐶𝑛 } de 𝒞 a interseção 𝐶1 ∩ . . . ∩ 𝐶𝑛 não é vazia.
Exemplo 3.27. A coleção 𝒞 = {𝐼𝑛∈N } da forma 𝐼1 ⊂ . . . ⊂ 𝐼𝑛 ,
chamados intervalos encaixados na reta real, possuem a propriedade da interseção finita.
Teorema 3.22. Seja 𝑋 um espaço topológico. Então 𝑋 é compacto se, e somente se,para toda coleção 𝒞 de fechados 𝑋 que
⋂︀
𝐶 para
possui a propriedade da interseção finita, a interseção
𝐶∈𝒞
todos os elementos de 𝒞 não é vazia.
3.7. ESPAÇOS COMPACTOS
71
Demonstração: Dado uma coleção 𝒜 de subconjuntos
de 𝑋, seja 𝒞 = {𝑋 − 𝐴}|𝐴 ∈ 𝒜 a coleção de seus complementos,
tem-se que:
1. 𝒜 é uma coleção 𝒞 de fechados se, e somente se 𝒞 é uma
coleção de fechados;
2. A coleção 𝒜 cobre 𝑋 se, e somente se,
⋂︀
de todos os
𝐶∈𝒞
elementos de 𝒞 é vazia;
3. A subcoleção finita {𝐴1 , . . . , 𝐴𝑛 } de 𝒜 cobre 𝑋 se, e somente se, a interseção do elemento correspondente 𝐶𝑖 =
𝑋 − 𝐴𝑖 de 𝒞 é vazio.
Afirmar que 𝑋 não é compacto é o mesmo que dizer que
dada uma coleção 𝒜 de abertos, se nenhuma subcoleção finita
de 𝒜 cobre 𝑋, então 𝒜 não é cobertura de 𝑋. Seja 𝒞 a coleção
{𝑋 − 𝐴|𝐴 ∈ 𝒜} e aplicando as considerações (1), (2) e (3) temos
que dado uma coleção 𝒞 de fechados, se toda interseção finita
de elementos de 𝒞 é não vazia, então a interseção de todos os
elementos de 𝒞 é não vazia.
Exemplo 3.28. Pelo teorema anterior temos que o conjunto
R+ não é compacto. Tome a coleção dos intervalos da forma
[𝑛 − 1, +∞], para todo 𝑛 ∈ N este conjunto é fechado (R − R+ é
aberto), e possui a propriedade da interseção finita, no entanto,
se tomarmos sua interseção infinita ela será vazia.
Teorema 3.23. Seja 𝑋 um conjunto ordenado com a propriedade do supremo. Na topologia da ordem, todo intervalo fechado
em 𝑋 é compacto.
72
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Demonstração: Dados 𝑎 < 𝑏, e 𝒜 uma cobertura de
[𝑎, 𝑏] por abertos em [𝑎, 𝑏] na topologia do subespaço. Desejamos
provar a existência de uma subcoleção finita de 𝒜 que cobre
[𝑎, 𝑏].
Primeiro vamos mostrar que se 𝑥 ∈ [𝑎, 𝑏] e 𝑥 ̸= 𝑏 então
existe 𝑦 com 𝑥 < 𝑦 em [𝑎, 𝑏] tal que [𝑥, 𝑦] pode ser coberto por
no máximo dois elementos de 𝒜. Se 𝑥 possui sucessor imediato
em 𝑋, seja 𝑦 este sucessor imediato, então [𝑥, 𝑦] consiste em dois
pontos 𝑥 e 𝑦 e portanto, pode ser coberto por no máximo dois
elementos de 𝒜. se 𝑥 não possui sucessor imediato em 𝑋, tome
um elemento 𝐴 de 𝒜 contendo 𝑥. Como 𝑥 ̸= 𝑏 e 𝐴 é aberto, 𝐴
contém um intervalo da forma [𝑥, 𝑐), para algum 𝑐 ∈ [𝑎, 𝑏]. Tome
𝑦 ∈ (𝑥, 𝑐), então [𝑥, 𝑦] por um único elemento 𝐴 de 𝒜.
Seja 𝐶 o conjunto de todos os pontos 𝑦 > 𝑎 de [𝑎, 𝑏]
tal que o intervalo [𝑎, 𝑦] admita ser coberto por uma quantidade
finita de elementos de 𝒜. Aplicando o primeiro passo para o caso
em que 𝑥 = 𝑎 então, existe pelo menos um 𝑦 tal que 𝐶 não é
vazio. Seja 𝑐 o supremo de 𝐶, então 𝑎 < 𝑐 ≤ 𝑏 ([𝑎, 𝑏] é limitado
superiormente).
Falta mostrar que 𝑐 ∈ 𝐶, ou seja, mostrar que [𝑎, 𝑐]
pode ser coberto por uma quantidade finita de elementos de
𝒜. Tome 𝐴 um elemento de 𝒜 contendo 𝑐, como 𝐴 é aberto,
contém um intervalo da forma (𝑑, 𝑐] para algum 𝑑 ∈ [𝑎, 𝑏]. Se
𝑐∈
/ 𝐶 então, existe um ponto 𝑧 ∈ 𝐶 contido no intervalo (𝑑, 𝑐),
pois de outra forma d seria o supremo de 𝐶. Como 𝑧 ∈ 𝐶, [𝑎, 𝑧]
pode ser coberto por uma quantidade 𝑛 de elementos de 𝒜. desta
forma, [𝑧, 𝑐] está contido em um único elemento 𝐴 de 𝒜. Assim,
[𝑎, 𝑐] = [𝑎, 𝑧] ∪ [𝑧, 𝑐] pode ser coberto por 𝑛 + 1 elementos de 𝐴.
E portanto, 𝑐 ∈ 𝐶.
3.7. ESPAÇOS COMPACTOS
73
Falta mostrar que 𝑐 = 𝑏. Suponha 𝑐 < 𝑏, aplicando o
primeiro passo para 𝑥 = 𝑐, então existe ponto 𝑦 com 𝑐 < 𝑦 em
[𝑎, 𝑏] tal que [𝑐, 𝑦] é compacto. Já provamos que se 𝑐 ∈ 𝐶 então,
[𝑎, 𝑐] é compacto. Portanto [𝑎, 𝑦] = [𝑎, 𝑐] ∪ [𝑐, 𝑦] é compacto.
Assim, 𝑦 ∈ 𝐶, contradizendo o fato de 𝑐 ser supremo.
Corolário 3.1. Todo intervalo fechado e limitado em R é compacto.
Teorema 3.24. Um espaço 𝐴 de R𝑛 é compacto se, e somente
se, é fechado e limitado na métrica euclidiana 𝑑 ou na métrica
quadrada 𝜌.
Demonstração: Suponha 𝐴 compacto então 𝐴 é fechado pois, R é um espaço de Hausdorff. Considere a coleção
de abertos {𝐵𝜌 (0, 𝑚)|
𝑚 ∈ Z+ }, cuja união é todo R𝑛 . Pela
compacidade de 𝐴, segue que 𝐴 ⊂ 𝐵𝜌 (0, 𝑚) para algum 𝑀
(admite subcoleção finita). Portanto para quaisquer dois pontos 𝑥 e 𝑦 de 𝐴, temos que 𝜌(𝑥, 𝑦) ≤ 2𝑀 (Teorema 3.23), o
que significa que 𝐴 é limitado sob 𝜌. É suficiente mostar para
√︀
a métrica 𝜌 pois, 𝜌(𝑥, 𝑦) ≤ 𝑑(𝑥, 𝑦) ≤ (𝑛)𝜌(𝑥, 𝑦). Para a implicação inversa suponha que 𝐴 é fechado e limitado sob 𝜌, com
𝜌(𝑥, 𝑦) ≤ 𝑁 para todo par 𝑥, 𝑦 de pontos de 𝐴. escolha o ponto
𝑥0 de 𝐴 e seja 𝜌(𝑥0 , 0) = 𝑏. A desigualdade triangular implica
que 𝜌(𝑥, 0) ≤ 𝑁 + 𝑏 para todo 𝑥 ∈ 𝐴. Se 𝑃 = 𝑁 + 𝑏 então 𝐴 é
um subconjunto do cubo [−𝑃, 𝑃 ]𝑛 , que é compacto e portanto
𝐴 é compacto.
Exemplo 3.29. A esfera unitária 𝑆 𝑛−1 e a bola fechada 𝐵 𝑛 em
R𝑛 são compactos pois são fechadas e limitadas.
Exemplo 3.30. O conjunto 𝐴 = {𝑥× 𝑥1 | 0 < 𝑥 ≤ 1} é fechado,
mas não é compacto pois, não é limitado.
74
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Exemplo 3.31. 𝑆 = {𝑥 × 𝑠𝑒𝑛( 𝑥1 )| 0 < 𝑥 ≤ 1} é limitado em
R2 , mas não é compacto pois, não é fechado.
Teorema 3.25. (Teorema do valor máximo) Seja 𝑓 : 𝑋 → 𝑌 ,
onde 𝑌 é um conjunto ordenado na topologia da ordem. Se 𝑋
é compacto, então existem pontos 𝑐 e 𝑑 em 𝑋 tais que 𝑓 (𝑐) ≤
𝑓 (𝑥) ≤ 𝑓 (𝑑) para todo 𝑥 ∈ 𝑋.
Demonstração: Sabemos que 𝐴 = 𝑓 (𝑋) é compacto
(pela compacidade de 𝑋 e continuidade de 𝑓 ). Se 𝐴 possui
máximo 𝑀 e mínimo 𝑚 então, podemos tomar 𝑚 = 𝑓 (𝑐) e
𝑀 = 𝑓 (𝑑) para algum 𝑐 e 𝑑 em 𝑋. Se 𝐴 não possui máximo
a coleção {(−∞, 𝑎)|
𝑎 ∈ 𝐴} é uma cobertura aberta de 𝐴.
Pela compacidade de 𝐴, {(−∞, 𝑎1 ), . . . , (−∞, 𝑎𝑛 )} é uma cobertura para 𝐴. Se 𝑎𝑖 é o maior entre os elementos 𝑎1 , . . . , 𝑎𝑛 não
pertence a cobertura, um absurdo. Assim, 𝐴 possui máximo e
mínimo pelos mesmos argumentos.
Um caso particular deste teorema é quando 𝑋 é um
intervalo fechado em R e 𝑌 = R com 𝑓 : [𝑎, 𝑏] → R então
existem 𝑐 e 𝑑 pertencentes a [𝑎, 𝑏] tais que 𝑓 (𝑐) ≤ 𝑓 (𝑥) ≤ 𝑓 (𝑑)
Agora, desejamos generalizar o teorema da continuidade
uniforme. Para isto, precisamos introduzir uma nova definição.
Definição 3.23. Sejam (𝑋, 𝑑) um espaço métrico e 𝐴 um subconjunto não vazio de 𝑋. para cada 𝑥 ∈ 𝑋, definimos a distância de 𝑥 até 𝐴 pela equação: 𝑑(𝑥, 𝐴) = 𝑖𝑛𝑓 {𝑑(𝑥, 𝑎)|
𝑎 ∈ 𝐴}.
A função 𝑑(𝑋, 𝐴) para 𝐴 fixado é contínua em 𝑋. Pois,
dados 𝑥, 𝑦 ∈ 𝑋 temos que 𝑑(𝑥, 𝐴) ≤ 𝑑(𝑥, 𝑎) ≤ 𝑑(𝑥, 𝑦) + 𝑑(𝑦, 𝑎)
pela definição de ínfimo. Portanto, para cada 𝑎 ∈ 𝐴, em particular para 𝑎 tal que 𝑑(𝑥, 𝑦) = 𝑖𝑛𝑓 {𝑑(𝑥, 𝑎)| 𝑎 ∈ 𝐴}, temos
3.7. ESPAÇOS COMPACTOS
75
que 𝑑(𝑥, 𝐴) − 𝑑(𝑥, 𝑦) ≤ 𝑖𝑛𝑓 (.𝑦, 𝑎) = 𝑑(𝑦, 𝐴) e somando as desigualdades obtidas 𝑑(𝑥, 𝐴) − 𝑑(𝑦, 𝐴) ≤ 𝑑(𝑥, 𝑦). As desigualdades
se mantém trocando 𝑥 por 𝑦, de onde segue a continuidade de
𝑑(𝑥, 𝐴).
Lema 3.7. Seja 𝒜 uma cobertura aberta de um espaço métrico
(𝑋, 𝑑). Se 𝑋 é compacto, existe 𝛿 > 0 tal que para cada subconjunto de 𝑋 com diâmetro menor que 𝛿, existe um elemento de
𝒜 que contém este elemento. O número 𝛿 é chamado número
de Lebesgue para a cobertura 𝒜.
Demonstração: Seja 𝒜 uma cobertura aberta de 𝑋.
Se 𝑋 é um elemento de 𝒜 então qualquer número positivo é
um número de Lebesgue para 𝒜. Se 𝑥 ∈
/ 𝒜, tome a subcoleção
finita {𝐴1 , . . . , 𝐴𝑛 } de 𝒜 que cobre 𝑋, para cada 𝑖 o conjunto
∑︀𝑛
𝐶𝑖 = 𝑋 − 𝐴𝑖 e defina 𝑓 : 𝑋 → R com 𝑓 (𝑥) = 𝑛1 𝑖=1 𝑑(𝑥, 𝑐𝑖 ).
Mostraremos que 𝑓 (𝑥) > 0 para todo 𝑥.
Dado 𝑥 ∈ 𝑋, escolha 𝑖 de tal que 𝑥 ∈ 𝐴𝑖 . Então tome
𝜖 tal que a 𝜖 − 𝑣𝑖𝑧𝑖𝑛ℎ𝑎𝑛ç𝑎 de 𝑥 está contido em 𝐴𝑖 . Daí tem-se
que 𝑑(𝑥, 𝑐𝑖 ) ≥ 𝜖 e portanto 𝑓 (𝑥) ≥
𝜖
𝑛.
Pela continuidade de 𝑓 , 𝑓 possui mínimo valor 𝛿. Seja ℬ
um subconjunto de 𝑋 com diâmetro (Definição 3.7) menor que 𝛿.
Tome um ponto 𝑥0 de ℬ. Então, ℬ está contido na 𝛿−𝑣𝑖𝑧𝑖𝑛ℎ𝑎𝑛ç𝑎
de 𝑥0 . Agora temos que 𝛿 ≤ 𝑓 (𝑥0 ) ≤ 𝑑(𝑥0 , 𝑐𝑚 ), onde 𝑑(𝑥0 , 𝑐𝑚 )
é o maior dos 𝑑(𝑥0 , 𝑐𝑖 ). Portanto, a 𝛿 − 𝑣𝑖𝑧𝑖𝑛ℎ𝑎𝑛ç𝑎 de 𝑥0 está
contida no elemento 𝐴𝑚 = 𝑋 − 𝐶𝑚 da cobertura de 𝒜.
Definição 3.24. A função 𝑓 do espaço métrico 𝑑(𝑋, 𝑑𝑥 ) para
o espaço métrico (𝑌, 𝑑𝑦 ) é dita ser uniformemente contínua
se dado 𝜖 > 0, existe 𝛿 > 0 tal que para todo par de pontos 𝑥0 ,
𝑥1 ∈ 𝑋, 𝑑𝑥 (𝑥0 , 𝑥1 ) implica em 𝑑𝑦 (𝑓 (𝑥0 ), 𝑓 (𝑥1 )) < 𝜖
76
Capítulo 3. CONTINUIDADE DE FUNÇÕES
Teorema 3.26. (Teorema da continuidade uniforme) Seja
𝑓 : 𝑋 → 𝑌 uma aplicação contínua de um espaço métrico compacto (𝑋, 𝑑𝑦 ) para um espaço métrico (𝑌, 𝑑𝑦 ). Então, 𝑓 é uniformemente contínua.
Demonstração: Dado 𝜖 > 0, tome 𝐵(𝑦, 2𝜖 ) uma cobertura aberta de 𝑌 de raio 2𝜖 . Seja 𝒜 uma cobertura aberta de 𝑋
dada pelas imagens inversas destas bolas sob 𝑓 . Tome 𝛿 um número de Lebesgue para a cobertura 𝒜. Então, se 𝑥1 e 𝑥2 são dois
pontos de 𝑋 tal que 𝑑𝑥 (𝑥1 , 𝑥2 ) < 𝛿, o conjunto {𝑥1 , 𝑥2 } possui
diâmetro menor que 𝛿 e portanto, sua imagem 𝑓 (𝑥1 ), 𝑓 (𝑥2 ) está
contida em alguma bola 𝐵(𝑦, 2𝜖 ). Portanto, 𝑑𝑦 (𝑓 (𝑥1 , 𝑥2 )) < 𝜖
77
4 GRUPO FUNDAMENTAL
O estudo de um espaço topológico se torna mais simples
quando este espaço pode ser comparado com espaços topológicos
conhecidos. Por exemplo, os intervalos fechados da reta que são
homeomorfos entre si e, portanto, possuem os mesmos invariantes topológicas. Os invariantes topológicas são propriedades dos
espaços que não se alteram mediante homeomorfismo. Como, por
exemplo, a compacidade e a conexidade.
No entanto, alguns espaços que se vêm claramente não
serem homomorfos possuem as mesmas propriedades topológicas
dentre as estudadas até agora. A fim de obtermos novas invariantes topológicas, faremos um apelo algébrico, comparando a
estrutura topológica a uma estrutura algébrica. Um dos ganhos
deste enfoque é a operação associada e suas propriedades. Desta
forma, espaços topológicos homeomorfos corresponderiam a estruturas algébricas isomorfas.
Em particular, um dos resultados deste enfoque é mostrar que um disco e um anel no plano não são homeomorfos, o
que nos permitirá demonstrar resultados clássicos pelo viés da
topologia.
Nesta capítulo, apresentaremos a construção do grupo
fundamental por meio de homotopias por caminhos, mostraremos que o grupo fundamental do círculo é isomorfo ao grupo
aditivo dos números inteiros e, por fim, apresentaremos uma
aplicação do grupo fundamental do círculo: a demonstração do
teorema fundamental da álgebra. Para este capítulo foram usa-
78
Capítulo 4. GRUPO FUNDAMENTAL
dos prioritariamente Lima (2006), Munkres (2000) e D’Ambrósio
(1977), onde os teoremas se encontram, salvo menção do contrário, em Munkres (2000).
4.1 HOMOTOPIA
Consideraremos por conveniência 𝐼 = [0, 1] o domínio de
todos os caminhos daqui em diante, pois, I é homeomorfo a todos
os intervalos compactos da reta. Além disto, subentenderemos
que todos os espaços deste capítulo são espaços topológicos.
Definição 4.1. Sejam 𝑓 : 𝑋 → 𝑌 e 𝑔 : 𝑋 → 𝑌 aplicações
contínuas. Dizemos que 𝑓 é homotópico a 𝑔 e escrevemos 𝑓 ≃
𝑔, se existe uma aplicação contínua 𝐹 : 𝑋 × 𝐼 → 𝑌 tal que
𝐹 (𝑥, 0) = 𝑓 (𝑥) e 𝐹 (𝑥, 1) = 𝑔(𝑥) para todo 𝑥 ∈ 𝑋. A aplicação
𝐹 é dita homotopia entre 𝑓 e 𝑔.
Dizer que 𝑓 ≃ 𝑔 significa, geometricamente, que podemos deformar continuamente 𝑓 (𝑋) em 𝑔(𝑋).
Exemplo 4.1. As aplicações identidade e constante nula do R𝑛
são homotópicas. Isto é, se 𝑖𝑑 : (𝑥1 , . . . , 𝑥𝑛 ) → (𝑥1 , . . . , 𝑥𝑛 ) e 𝑘 :
(𝑥1 , . . . , 𝑥𝑛 ) → (0, . . . , 0) então 𝑖𝑑 ≃ 𝑘. De fato, tome a aplicação
𝐻(𝑥, 𝑡) = ((1 − 𝑡)𝑥1 , . . . , (1 − 𝑡)𝑥𝑛 ) onde 𝑥 = (𝑥1 , . . . , 𝑥𝑛 ). A
aplicação 𝐻 é contínua, pois se trata do produto cartesiano de
aplicações contínuas (Teorema 3.5) e também, 𝐻(𝑥, 0) = 𝑖𝑑(𝑥),
𝐻(𝑥, 1) = 𝑘(𝑥), portanto, 𝐻 é uma homotopia.(D’AMBRóSIO,
1977)
Definição 4.2. Dois caminhos 𝑓 : 𝐼 → 𝑋 e 𝑔 : 𝐼 → 𝑋, são
ditos homotópicos por caminho (𝑓 ∼
= 𝑔) se possuem o mesmo
ponto inicial 𝑥0 e mesmo ponto final 𝑥1 e se existe uma aplicação
4.1. HOMOTOPIA
79
contínua 𝐹 : 𝐼 × 𝐼 → 𝑋 tal que 𝐹 (𝑠, 0) = 𝑓 (𝑠), 𝐹 (𝑠, 1) = 𝑔(𝑠),
𝐹 (0, 𝑡) = 𝑥0 e 𝐹 (1, 𝑡) = 𝑥1 para cada 𝑠, 𝑡 ∈ 𝐼. A aplicação 𝐹 é
chamada de homotopia por caminho entre 𝑓 e 𝑔. (Figura 4)
F (0, t)
g
x0
•
I ×I
F (1, t)
F :I ×I →X
•
x1
f
Figura 4 – Homotopias por caminho.
Dizer que 𝑓 ∼
= 𝑔 implica em dizer que 𝑓 e 𝑔 são homotópicos e tem a origem e o fim em comum. No entanto, como visto
em topologia quociente era possível definir abertos em termos
∼ são
de classes de equivalência, o que motiva verificar se ≃ e =
relações de equivalência.
Lema 4.1. As relações ≃ e ∼
= são relações de equivalência.
80
Capítulo 4. GRUPO FUNDAMENTAL
Demonstração: 𝑖) Reflexiva:
Seja 𝑓 : 𝑋 → 𝑌 uma aplicação contínua. A aplicação
𝐹 (𝑥, 𝑡) = 𝑓 (𝑥) é uma homotopia entre 𝑓 e 𝑓, pois 𝐹 é contínua
pela continuidade de 𝑓 e 𝐹 (𝑥, 0) = 𝐹 (𝑥, 1) = 𝑓 (𝑥). No caso em
que 𝑓 é um caminho de 𝑥0 para 𝑥1 , temos que 𝐹 (0, 𝑡) = 𝑓 (0) =
∼ 𝑓.
𝑥0 e 𝐹 (1, 𝑡) = 𝑓 (1) = 𝑥1 . De onde vem que 𝑓 ≃ 𝑓 e 𝑓 =
𝑖𝑖) Simétrica:
Seja 𝐹 uma homotopia entre 𝑓 e 𝑔, então 𝐺(𝑥, 𝑡) =
𝐹 (𝑥, 1 − 𝑡) é uma aplicação contínua (composta entre funções
contínuas) tal que 𝐺(𝑥, 0) = 𝑔(𝑥) e 𝐺(𝑥, 1) = 𝑓 (𝑥) e portanto
uma homotopia entre 𝑔 e 𝑓 . Em particular se 𝑓 e 𝑔 são caminhos
𝐺(0, 𝑡) = 𝐹 (0, 1 − 𝑡) = 𝑥0 e 𝐺(1, 𝑡) = 𝐹 (1, 1 − 𝑡) = 𝑥1 . E assim,
∼ 𝑓.
𝑔≃𝑓 e𝑔=
𝑖𝑖𝑖) Transitiva:
Suponha que 𝑓 ≃ 𝑔 e 𝑔 ≃ ℎ, então seja 𝐹 a homotopia
entre 𝑓 e 𝑔 e 𝐺 a homotopia entre 𝑔 e ℎ. Definindo 𝐻 : 𝑋 ×𝐼 → 𝑌
da forma
⎧
⎨𝐹 (𝑥, 2𝑡),
se 𝑡 ∈ [0, 12 ],
𝐻(𝑥, 𝑡) =
⎩𝐺(𝑥, 2𝑡 − 1), se 𝑡 ∈ [ 1 , 1].
2
Temos que, 𝐻(𝑥, 0) = 𝐹 (𝑥, 0) = 𝑓 (𝑥) e 𝐻(𝑥, 1) = 𝐺(𝑥, 1) = ℎ(𝑥)
e se 𝑡 =
1
2,
𝐹 (𝑥, 1) = 𝑔(𝑥) = 𝐺(𝑥, 0). Pelo lema da colagem
𝐻(𝑥, 𝑡) é contínua em todo 𝑋 × 𝐼 e é uma homotopia entre 𝑓 e
ℎ. Em particular se 𝑓 , 𝑔 e ℎ são caminhos 𝐻(0, 𝑡) = 𝐹 (0, 2𝑡) =
𝐺(0, 2𝑡 − 1) = 𝑓 (0) = 𝑔(0) = ℎ(0) = 𝑥0 e 𝐻(1, 𝑡) = 𝐹 (1, 2𝑡) =
𝐺(1, 2𝑡 − 1) = 𝑓 (1) = 𝑔(1) = ℎ(1) = 𝑥1 .
Assim, a homotopia e a homotopia por caminhos são
relações com as propriedades reflexiva , simétrica e transitiva.
4.1. HOMOTOPIA
81
Exemplo 4.2. Sejam 𝑓 e 𝑔 duas aplicações do espaço 𝑋 em
R2 , a aplicação 𝐹 (𝑥, 𝑡) = ((1 − 𝑡)𝑓 (𝑥) + 𝑡𝑔(𝑥)) é uma homotopia
entre eles, dita homotopia da linha reta, pois ao fixarmos 𝑥 obtemos linhas retas que ligam 𝑓 e 𝑔. Note que, dados dois caminhos
quaisquer em R𝑛 que possuem mesma origem 𝑥0 e mesmo fim
𝑥1 estes caminhos são homotópicos por caminho em qualquer subespaço convexo de R𝑛 , que os contenha, por meio da homotopia
da reta. Em particular, caminhos definidos com mesma
origem e mesmo fim, definidos em 𝐼 × 𝐼 ( subespaço convexo de R2 ) são homotópicos por caminhos.
Exemplo 4.3. Seja 𝑋 o conjunto R2 −0. Note que 𝑋 não é convexo. Podemos verificar que os caminhos 𝑓 (𝑠) = (𝑐𝑜𝑠(𝜋𝑠), 𝑠𝑒𝑛(𝜋𝑠))
e 𝑔(𝑠) = (𝑐𝑜𝑠(𝜋𝑠), 2𝑠𝑒𝑛(𝜋𝑠)) são homotópicos por caminho utilizando a homotopia da linha reta em 𝑋. No entanto, para construir uma homotopia entre a aplicação ℎ(𝑠) = (𝑐𝑜𝑠(𝜋𝑠), −𝑠𝑒𝑛(𝜋𝑠))
e 𝑓 não se pode utilizar a homotopia da linha reta.
Definição 4.3. Se 𝑓 é um caminho em 𝑋 de 𝑥0 a 𝑥1 e 𝑔 uma
caminho em 𝑋 de 𝑥1 a 𝑥2 , definimos o produto 𝑓 * 𝑔 de 𝑓 e 𝑔
como sendo o caminho ℎ da forma
ℎ(𝑠) =
⎧
⎨𝑓 (2𝑠),
se
𝑠 ∈ [0, 12 ],
⎩𝑔(2𝑠 − 1),
se
𝑠 ∈ [ 12 , 1].
Pelo lema da colagem ℎ(𝑠)é um caminho de 𝑥0 a 𝑥2 .
Além disto, 𝑓 (2𝑠) e 𝑔(2𝑠 − 1) são caminhos de 𝑥0 a 𝑥2 , mas nos
intervalos de [0, 12 ] e [ 12 , 1].
Proposição 4.1. Sejam 𝑓1 ∼
= 𝑓2 e 𝑔1 ∼
= 𝑔2 , com 𝑓1 (1) = 𝑔1 (0)
∼
e 𝑓2 (1) = 𝑔2 (0), então 𝑓1 * 𝑔1 = 𝑓2 * 𝑔2 .(LIMA, 2006)
82
Capítulo 4. GRUPO FUNDAMENTAL
Demonstração: Sejam 𝐻 uma homotopia entre 𝑓1 e
𝑓2 e 𝐾 uma homotopia entre 𝑔1 e 𝑔2 , definimos 𝐿 : 𝐼 × 𝐼 → 𝑋
da forma:
⎧
⎨𝐻(2𝑠, 𝑡),
se 𝑠 ∈ [0, 21 ],
𝐿(𝑠, 𝑡) =
⎩𝐾(2𝑠 − 1, 𝑡), se 𝑠 ∈ [ 1 , 1],
2
𝑡∈𝐼
𝑡 ∈ 𝐼.
Com isso, 𝐻(1, 𝑡) = 𝐾(0, 𝑡) = 𝑓1 (1) = 𝑔1 (0) para todo 𝑡 ∈ 𝐼,
𝑓1 (2𝑠), 𝑓2 (2𝑠), 𝑔1 (2𝑠 − 1) e 𝑔2 (2𝑠 − 1) são contínuas nos respectivos intervalos, pela composição entre funções contínuas, como
𝐻(2𝑠, 𝑡) e 𝐻(2𝑠 − 1, 𝑡) são produto cartesiano entre funções contínuas, utilizando o lema da colagem, 𝐿(𝑠, 𝑡) é contínua. Além
disto, 𝐿 é uma homotopia entre 𝑓1 * 𝑔1 e 𝑓2 * 𝑔2 pela forma com
que foi definida e assim, 𝑓1 * 𝑔1 ∼
= 𝑓2 * 𝑔2 .
Seja [𝑓 ] a classe de homotopias por caminhos em 𝑋 (o
conjunto de todas as funções homotópicas por caminho a f ),
com origem em um ponto 𝑥0 ∈ 𝑋 e fim em um ponto 𝑥1 ∈ 𝑋 e
[𝑔] a classe de homotopias por caminhos em 𝑋 com origem no
ponto 𝑥1 ∈ 𝑋 e fim em um ponto 𝑥2 ∈ 𝑋, então [𝑓 ]* [𝑔] = [𝑓 *𝑔].
De fato, pela proposição anterior, temos que [𝑓 * 𝑔] não depende
das escolhas de 𝑓 ∈ [𝑓 ] e 𝑔 ∈ [𝑔], ou seja, a operação * está bem
definida.
Nosso objetivo agora é relacionar espaços topológicos a
grupos algébricos com a operação produto definida. Para isto,
precisamos de alguns resultados.
Proposição 4.2. Seja 𝑘 : 𝑋 → 𝑌 uma aplicação contínua e F
uma homotopia por caminhos em 𝑋 entre 𝑓1 e 𝑓2 , então 𝑘∘𝐹 é
uma homotopia em 𝑌 entre 𝑘∘𝑓1 e 𝑘∘𝑓2 .
Demonstração: 𝐹 é contínua por ser uma homotopia
e 𝑘∘𝑓1 e 𝑘∘𝑓2 são contínuas por serem composições entre funções
4.1. HOMOTOPIA
83
contínuas. Para verificar que 𝑘∘𝐹 é uma homotopia entre 𝑘∘𝑓1 e
𝑘∘𝑓2 temos que (𝑘∘𝐹 )(𝑠, 0) = 𝑘∘𝐹 (𝑠, 0) = 𝑘(𝑓1 (𝑠)) = (𝑘∘𝑓1 (𝑠)).
E (𝑘∘𝐹 )(𝑠, 1) = 𝑘∘𝐹 (𝑠, 1) = 𝑘(𝑓2 (𝑠)) = (𝑘∘𝑓2 (𝑠)).
Além disto, como 𝐹 (0, 𝑡) = 𝑓1 (0, 𝑡) = 𝑓2 (0, 𝑡) = 𝑥0 e
𝐹 (1, 𝑡) = 𝑓1 (1, 𝑡) = 𝑓2 (1, 𝑡) = 𝑥1 para todo 𝑡 ∈ [0, 1], temos também (𝑘∘𝐹 )(0, 𝑡) = 𝑘∘𝐹 (0, 𝑡) = 𝑘(𝑥0 ) e (𝑘∘𝐹 )(1, 𝑡) = 𝑘∘𝐹 (1, 𝑡) =
𝑘(𝑥1 ) para todo 𝑡 ∈ [0, 1].
Teorema 4.1. Para os casos em que está bem definida, a operação * possui as seguintes propriedades:
1. (Associatividade) [𝑓 ] * ([𝑔] * [ℎ]) = ([𝑓 ] * [𝑔]) * [ℎ] desde que
𝑓 (1) = 𝑔(0) e 𝑔(1) = ℎ(0).
2. (Identidade a direita e a esquerda) Dado 𝑥 ∈ 𝑋, seja 𝑒𝑥 o
caminho constante 𝑒𝑥 : 𝐼 → 𝑋 tal que 𝑒𝑥 (𝑠) = 𝑥. Se 𝑓 é
um caminho em 𝑋 de 𝑥0 para 𝑥1 , então [𝑓 ] * [𝑒𝑥1 ] = [𝑓 ] e
[𝑒𝑥0 ] * [𝑓 ] = [𝑓 ].
3. (Inversa) Seja 𝑓 um caminho em 𝑋 de 𝑥0 para 𝑥1 o caminho 𝑓¯ = 𝑓 (1−𝑠) é dito o reverso de 𝑓 . Então [𝑓 ]*[𝑓¯] = [𝑒𝑥 ]
0
e [𝑓¯] * [𝑓 ] = [𝑒𝑥1 ].
A operação * entre os caminhos [𝑓 ] e [𝑔] em um espaço
topológico 𝑋, munido da lei de composição * só é definida se
𝑓 (1) = 𝑔(0) assim, o conjunto das classes de homotopia por
caminhos com a operação * não é um grupo mas o definimos
como o grupoide fundamental de 𝑋.
84
Capítulo 4. GRUPO FUNDAMENTAL
4.2 GRUPO FUNDAMENTAL
Todas as propriedades das homotopias por caminho apresentadas até aqui são válidas no caso em que o caminho dado
tem origem e fim coincidentes, basta tomar 𝑥0 = 𝑥1 = 𝑥2 nas
definições e demonstrações apresentadas para o grupóide fundamental.
Definição 4.4. Um caminho em um espaço topológico com mesma
origem e fim em um determinado ponto base 𝑥0 , é dito laço com
base em 𝑥0 .
Definição 4.5. Seja 𝑋 um espaço topológico e 𝑥0 um ponto de
𝑋. O conjunto das classes de homotopia por laços com base em
𝑥0 , com a operação *, é chamado grupo fundamental, grupo
de Poincaré, ou primeiro grupo de homotopia de 𝑋 em
relação ao ponto base 𝑥0 . E será denotado por 𝜋1 (𝑋, 𝑥0 )
Pelo Teorema (4.1) é imediato que a operação * restrita
ao conjunto 𝜋1 (𝑋, 𝑥0 ) é sempre definida para quaisquer dois elementos deste conjunto e satisfaz os axiomas de grupo ,ou seja,
dados laços 𝑓 , 𝑔 e ℎ quaisquer em 𝜋1 (𝑋, 𝑥0 ), 𝑓 (0) = 𝑔(0) =
𝑓 (1) = 𝑔(1) = 𝑥0 , [𝑓 ] * ([𝑔] * [ℎ]) = ([𝑓 ] * [𝑔]) * [ℎ],[𝑒𝑥0 ] é o
elemento neutro e o inverso de [𝑓 ] é [𝑓¯].
Exemplo 4.4. Considere grupo fundamental 𝜋1 (R𝑛 , (0, . . . , 0)),
temos que este é igual ao conjunto unitário {[𝑒]}, onde 𝑒 é a
aplicação constante cuja imagem é o ponto (0, . . . , 0) . De fato,
seja 𝐻(𝑠, 𝑡) = (1 − 𝑡)𝛼(𝑠) uma aplicação de 𝐼 × 𝐼 para R𝑛 , 𝐻
é contínua e 𝐻(𝑠, 0) = 𝛼(𝑠), 𝐻(𝑠, 1) = (0, . . . , 0) para todo 𝑠 e
portanto 𝐻(𝑠, 1) = 𝑒(𝑠) e 𝐻(0, 𝑡) = 𝐻(1, 𝑡) = (0, . . . , 0) e assim,
uma homotopia entre 𝛼 e 𝑒 para qualquer laço com este ponto
base. Portanto a única classe de equivalência de laços é [𝑒]
4.2. GRUPO FUNDAMENTAL
85
De modo geral, no espaço euclidiano n-dimensional R𝑛 ,
temos que, para qualquer ponto (𝑥1 , . . . , 𝑥𝑛 ), o grupo fundamental 𝜋1 (𝑋, (𝑥1 , . . . , 𝑥𝑛 )) consiste do conjunto unitário {[𝑒]}
em qualquer subconjunto convexo 𝑋 de R𝑛 , onde 𝑒 é um caminho constante com imagem 𝑥1 , . . . , 𝑥𝑛 . Basta tomar a homotopia
da linha reta entre os laços com base em 𝑥1 , . . . , 𝑥𝑛 e o caminho constante 𝑒. Neste caso, dizemos que 𝜋1 (𝑋, (𝑥1 , . . . , 𝑥𝑛 )) é
o grupo fundamental trivial. Em particular a bola unitária
𝐵 𝑛 em R𝑛 dada por 𝐵 𝑛 = {𝑥|𝑥1 2 + . . . + 𝑥𝑛 2 ≤ 1} tem grupo
fundamental trivial.
Definição 4.6. Seja 𝛼 um caminho em 𝑋 de 𝑥0 a 𝑥1 . Definimos
a aplicação 𝛼
^ : 𝜋1 (𝑋, 𝑥0 ) → 𝜋1 (𝑋, 𝑥1 ) pela equação
𝛼
^ ([𝑓 ]) = [𝛼
¯ ] * [𝑓 ] * [𝛼],
que chamaremos de "𝛼 chapéu".
A aplicação 𝛼
^ é bem definida pois depende apenas do
fato de * ser bem definida. Além disto, se 𝑓 é um laço com base
em 𝑥0 então, 𝛼
¯ * (𝑓 * 𝛼) é um laço com base em 𝑥1 , o que mostra
que 𝛼
^ é uma aplicação de 𝜋1 (𝑋, 𝑥0 ) para 𝜋1 (𝑋, 𝑥1 ) e depende
unicamente das classes de homotopia por caminho de 𝛼.
Teorema 4.2. A aplicação 𝛼
^ é um isomorfismo de grupo.
Demonstração: Para mostrar um isomorfismo de grupos é necessário mostrar que a aplicação definida é um homomorfismo e uma aplicação bijetora (Lembrando que uma função
é bijetora se, e somente se, é inversível). Mostrar que 𝛼
^ é um homomorfismo implica em verificar que 𝛼
^ ([𝑓 ])* 𝛼
^ ([𝑔]) = 𝛼
^ ([𝑓 ]*[𝑔]).
86
Capítulo 4. GRUPO FUNDAMENTAL
Isso ocorre de fato, pois
𝛼
^ ([𝑓 ]) * 𝛼
^ ([𝑔]) = ([𝛼
¯ ] * [𝑓 ] * [𝛼]) * ([𝛼
¯ ] * [𝑔] * [𝛼])
= [𝛼
¯ ] * [𝑓 ] * [𝑔] * [𝛼] = 𝛼
^ ([𝑓 ] * [𝑔])
Para mostrar a bijeção, definimos 𝛽^ : 𝜋1 (𝑋, 𝑥1 ) → 𝜋1 (𝑋, 𝑥0 ) por
^ ]) = [𝛽]
¯ * [𝑓 ] * [𝛽] com 𝛽 = 𝛼
𝛽([𝑓
¯ (reverso de 𝛼). Temos que para
todo [ℎ] em 𝜋1 (𝑋, 𝑥1 ) e [𝑓 ] em 𝜋1 (𝑋, 𝑥0 ),
^
¯ * [ℎ] * [𝛽] = [𝛼
¯ ] * [ℎ] * [𝛼
𝛽([ℎ])
= [𝛽]
¯ ] = [𝛼] * [ℎ] * [𝛼
¯ ].
O que implica em
^
𝛼
^ (𝛽[ℎ])
= [𝛼
¯ ] * ([𝛼] * [ℎ] * [𝛼
¯ ]) * [𝛼] = [ℎ]
e
^ 𝛼[𝑓 ]) = [𝛼] * ([𝛼
𝛽(^
¯ ] * [ℎ] * [𝛼]) * [𝛼
¯ ] = [ℎ].
Assim, 𝛽^ = 𝛼
^ −1 . Ou seja, 𝛼 é inversível, o que implica em bijetividade desta.
É imediato do Teorema (4.2) que se 𝑋 é conexo por
caminhos e 𝑥1 e 𝑥1 são dois pontos de 𝑋, então é 𝜋1 (𝑋, 𝑥0 )
isomorfo a 𝜋1 (𝑋, 𝑥1 ) ( 𝜋1(𝑋, 𝑥0 ) ≈ 𝜋1 (𝑋, 𝑥1 )). Pois se 𝐶 é uma
componente conexa de 𝑋 por caminhos que contém 𝑥0 todos os
laços e homotopias com base em 𝑥0 estão contidas no subespaço
𝑉 . E assim, 𝜋1 (𝐶, 𝑥0 ) = 𝜋1 (𝑋, 𝑥0 ). Em outras palavras, mudar
o ponto base em um espaço conexo por caminhos não altera o
grupo fundamental. (D’AMBRóSIO, 1977)
Definição 4.7. Um espaço 𝑋 é dito simplesmente conexo se
é um espaço conexo por caminho e 𝜋1 (𝑋, 𝑥0 ) é o grupo trivial
para algum 𝑥0 ∈ 𝑋. Escrevemos 𝜋1 (𝑋, 𝑥0 ) = 0 para denotar que
se trata do grupo fundamental trivial.
4.2. GRUPO FUNDAMENTAL
87
Note que esta definição está totalmente de acordo (com
os devidos ajustes) com a já conhecida nos cursos de cálculo,
onde se 𝐷 é domínio em R𝑛 , dizemos que 𝐷 é simplesmente
conexo quando qualquer curva fechada simples em 𝐷 pode ser
reduzida de maneira contínua a um ponto qualquer de 𝐷 sem
sair de 𝐷.
Sejam 𝛼 e 𝛽 dois caminhos de 𝑥0 para 𝑥1 . Então 𝛼 * 𝛽¯
é um laço em 𝑋 com base em 𝑥0 . Se 𝑋 é simplesmente conexo
este laço é homotópico por caminho ao laço constante em 𝑥0 .
¯ * [𝛽] = [𝛽] =
Desta forma temos que, [𝛼] = [𝛼] * [𝛽¯ * 𝛽] = [𝛼 * 𝛽]
[𝑒𝑥0 ]*[𝛽] = [𝛽]. Em outras palavras, em um espaço simplesmente
conexo quaisquer dois caminhos que tenham mesma origem e
mesmo fim são homotópicos por caminhos. (MUNKRES, 2000)
Para provarmos que o grupo fundamental é um invariante topológico (objetivo e motivação deste estudo) vamos definir
um homomorfismo induzido por uma aplicação contínua.
Definição 4.8. Sejam ℎ : (𝑋, 𝑥0 ) → (𝑌, 𝑦0 ) uma aplicação de 𝑋
para 𝑌 , contínua com ℎ(𝑥0 ) = 𝑦0 e ℎ* : 𝜋1 (𝑋, 𝑥0 ) → 𝜋1 (𝑌, 𝑦0 ),
de forma que ℎ* ([𝑓 ]) = [ℎ ∘ 𝑓 ] a aplicação ℎ* é dita homomorfismo induzido por ℎ, relativo ao ponto base 𝑥0 .
A aplicação ℎ* é bem definida. Para ver isto, tome 𝐹
uma homotopia por caminhos entre 𝑓 e 𝑔 então ℎ ∘ 𝐹 é uma
homotopia entre os caminhos ℎ ∘ 𝑓 e ℎ ∘ 𝑔. A aplicação ℎ* é
um homomorfismo vem de que (ℎ ∘ 𝑓 ) * (ℎ ∘ 𝑔) = ℎ ∘ (𝑓 * 𝑔).
(MUNKRES, 2000)
Teorema 4.3. Se ℎ : (𝑋, 𝑥0 ) → (𝑌, 𝑦0 ) e 𝑘 : (𝑌, 𝑦0 ) → (𝑍, 𝑧0 )
são aplicações contínuas, então (𝑘∘ℎ)* = 𝑘* ∘ℎ* . Se 𝑖 : (𝑋, 𝑥0 ) →
88
Capítulo 4. GRUPO FUNDAMENTAL
(𝑋, 𝑥0 ) é aplicação identidade, então 𝑖* é o homomorfismo identidade.
Demonstração: Por definição do homomorfismo induzido e propriedades de composição de funções contínuas:
(𝑘 ∘ ℎ)* ([𝑓 ]) = [(𝑘 ∘ ℎ) ∘ 𝑓 ] = [𝑘 ∘ (ℎ ∘ 𝑓 )]
= 𝑘* ([ℎ ∘ 𝑓 ]) = 𝑘* (ℎ* ([𝑓 ])) = (𝑘* ∘ ℎ* )([𝑓 ]).
Além disto, 𝑖* ([𝑓 ]) = [𝑖 ∘ 𝑓 ] = [𝑓 ]
Corolário 4.1. Se ℎ : (𝑋, 𝑥0 ) → (𝑌, 𝑦0 ) é um homomorfismo de
𝑋 com 𝑌 , então ℎ* é um isomorfismo de 𝜋1 (𝑋, 𝑥0 ) e 𝜋1 (𝑌, 𝑦0 ).
Demonstração: Sejam 𝑘 : (𝑌, 𝑦0 ) → (𝑋, 𝑥0 ) o inverso
de ℎ, 𝑖 a aplicação identidade em 𝑋 e 𝑗 a aplicação identidade
em 𝑌 . Mostrar que estes grupos são isomorfos é equivalente a
mostrar que 𝑘* ∘ ℎ* = 𝑖* e ℎ* ∘ 𝑘* = 𝑗* . Então pelo Teorema
(4.3) 𝑘* ∘ ℎ* = (𝑘 ∘ ℎ)* = 𝑖* e ℎ* ∘ 𝑘* = (ℎ ∘ 𝑘)* = 𝑗* e 𝑖* e 𝑗* são
os homomorfismos identidade dos grupos 𝜋1 (𝑋, 𝑥0 ) e 𝜋1 (𝑌, 𝑦0 )
respectivamente implica que 𝑘* é o inverso de ℎ*
O Corolário (4.1) diz, entre outras coisas, que espaços
homeomorfos possuem grupos fundamentais isomorfos, em outras palavras: é um invariante topológico.
4.3 ESPAÇOS DE RECOBRIMENTO
Definição 4.9. Seja 𝑝 : 𝐸 → 𝐵 uma aplicação sobrejetora contínua. O conjunto aberto 𝑈 de 𝐵 é dito suavemente recoberto
por 𝑝, se sua imagem inversa 𝑝−1 (𝑈 ) pode ser escrita como a
4.3. ESPAÇOS DE RECOBRIMENTO
89
união de abertos disjuntos 𝑉𝛼 em 𝐸, tais que para cada 𝛼 a restrição de 𝑝 a 𝑉𝛼 é um homeomorfismo de 𝑉𝛼 em 𝑈 . A coleção
{𝑉𝛼 } é dita partição de 𝑝−1 (𝑈 ) em fibras.
Uma vez que em cada 𝑉𝛼 , temos que 𝑝 é um homeomorfismo de 𝑉𝛼 em 𝑈, então é como se tivéssemos várias cópias de
𝑈 em 𝐸.
Da definição decorre que todo conjunto aberto contido
em um aberto 𝑈 uniformemente recoberto por 𝑝, é também uniformemente recoberto por 𝑝.
Definição 4.10. Seja 𝑝 : 𝐸 → 𝐵 contínua e sobrejetora. Se todo
ponto 𝑏 em 𝐵 tem uma vizinhança 𝑈 que é suavemente coberta
por 𝑝, então, 𝑝 é dita aplicação de recobrimento, e 𝐸 é dito
espaço de recobrimento de 𝐵.
Observação 4.1. Se 𝑝 : 𝐸 → 𝐵 é uma aplicação de recobrimento, então para cada 𝑏 ∈ 𝐵, o subespaço 𝑝−1 (𝑏) de 𝐸 tem
a topologia discreta. Pois, cada fibra 𝑉𝛼 é um aberto em 𝐸 e
intersecta o conjunto 𝑝−1 (𝑏) em um único ponto. Portanto, este
ponto é um aberto em 𝑝−1 (𝑏)
Observação 4.2. Se 𝑝 : 𝐸 → 𝐵 é um recobrimento, então,
𝑝 é uma aplicação aberta. De fato, suponha 𝐴 aberto em 𝐸.
Dado 𝑥 ∈ 𝑝(𝐴), escolha uma vizinhança 𝑈 de 𝑥 uniformemente
recoberta por 𝑝. Seja {𝑉𝛼 } uma partição de 𝑝−1 (𝑈 ) em fibras.
Existe um ponto 𝑦 de 𝐴 tal que 𝑝(𝑦) = 𝑥. Seja 𝑉𝛽 a fibra que
contém 𝑦, o conjunto 𝑉𝛽 ∩ 𝐴 é aberto em 𝐸 e portanto, aberto
em 𝑉𝛽 . Como 𝑝 aplica 𝑉𝛽 homeomorficamente em 𝑈 , o conjunto
𝑝(𝑉𝛽 ∩ 𝐴) é aberto em 𝑈 e portanto aberto em 𝐵 e esta é uma
vizinhança de 𝑥 contida em 𝑝(𝐴).
90
Capítulo 4. GRUPO FUNDAMENTAL
Exemplo 4.5. Sejam 𝑋 um espaço qualquer e 𝑖 : 𝑋 → 𝑋
a aplicação identidade. Então, 𝑖 é um recobrimento de 𝑋. Em
geral, a aplicação 𝑝 : 𝐸 → 𝑋 da forma 𝑝(𝑥, 𝑗) = 𝑥 para todo
𝑗 = 1, . . . , 𝑛, com 𝐸 = 𝑋 × {1, 2, . . . , 𝑛} que consiste de 𝑛 cópias
disjuntas de 𝑋, é um recobrimento.
Teorema 4.4. A aplicação 𝑝 : R → 𝑆 1 da forma 𝑝(𝑥) =
(𝑐𝑜𝑠(2𝜋𝑥), 𝑠𝑒𝑛(2𝜋𝑥)) é um recobrimento. Em outras palavras, o
círculo unitário pode ser uniformemente recoberto pela reta real,
por meio de 𝑝.
A restrição de um recobrimento não necessariamente é
um recobrimento. O teorema a seguir nos diz em que condições
se pode garantir que isto ocorra.
Teorema 4.5. Seja 𝑝 : 𝐸 → 𝐵 um recobrimento. Se 𝐵0 é
um subespaço de 𝐵, e se, 𝐸0 = 𝑝−1 (𝐵0 ), então, a aplicação
𝑝0 : 𝐸0 → 𝐵0 , obtida restringindo 𝑝, é uma aplicação de recobrimento.
4.4 GRUPO FUNDAMENTAL DO CÍRCULO
Definição 4.11. Seja 𝑝 : 𝐸 → 𝐵 uma aplicação. Se 𝑓 é uma
aplicação contínua de algum espaço 𝑋 em 𝐵, um levantamento
de 𝑓 é uma aplicação 𝑓˜ : 𝑋 → 𝐸 tal que 𝑝 ∘ 𝑓˜ = 𝑓 . Como está
representado no diagrama da Figura (5).
Exemplo 4.6. Seja 𝑝 : R → 𝑆 1 com 𝑝(𝑥) = (𝑐𝑜𝑠(𝑛𝜋𝑥), 𝑠𝑒𝑛(𝑛𝜋𝑥)),
𝑛 ∈ N. O caminho [0, 1] → 𝑆 1 com ponto inicial 𝑏0 = (1, 0) dado
por 𝑓 (𝑠) = (𝑐𝑜𝑠(𝜋𝑥), 𝑠𝑒𝑛(𝜋𝑥)) possui 𝑓˜ = 𝑠 com 𝑠 ∈ [0, 1 ] como
𝑛
𝑛
levantamento para 𝑓 (𝑠). O caminho ℎ̃(𝑠) = 𝑛𝑠 com 𝑠 ∈ [0, 𝑛] é
4.4. GRUPO FUNDAMENTAL DO CÍRCULO
91
X
f˜
E
p
f
B
Figura 5 – Diagrama de lavantamento.
um levantamento para ℎ(𝑠) = (𝑐𝑜𝑠(2𝑛𝜋𝑥), 𝑠𝑒𝑛(2𝑛𝜋𝑥)) e cobre
𝑛−vezes 𝑆 1 .
Os próximos dois lemas, não serão demonstrados, no entanto, para a demonstração consulte Munkres (2000).
Lema 4.2. Sejam 𝑝 : 𝐸 → 𝐵 um recobrimento e 𝑝(𝑒0 ) = 𝑏0 .
Qualquer caminho 𝑓 : [0, 1] → 𝐵 começando em 𝑏0 possui um
único levantamento para o caminho 𝑓˜ em 𝐸 começando em 𝑒0 .
Lema 4.3. Sejam 𝑝 : 𝐸 → 𝐵 um recobrimento e 𝑝(𝑒0 ) = 𝑏0 .
Seja a aplicação 𝐹 : 𝐼 × 𝐼 → 𝐵 contínua, com 𝐹 (0, 0) = 𝑏0 .
Existe um único levantamento de 𝐹 para a aplicação contínua
𝐹˜ : 𝐼 × 𝐼 → 𝐸 tal que 𝐹˜ (0, 0) = 𝑒0 . Se 𝐹 é uma homotopia por
caminho, então 𝐹˜ é uma homotopia por caminho.
Teorema 4.6. Sejam 𝑝 : 𝐸 → 𝐵 um recobrimento, 𝑝(𝑒0 ) = 𝑏0 ,
𝑓 e 𝑔 caminhos em 𝐵 de 𝑥0 para 𝑥1 , 𝑓˜ e 𝑔˜ seus respectivos
levantamentos para caminhos em 𝐸 começando em 𝑒0 . Se 𝑓 e 𝑔
são homotópicas por caminho, então 𝑓˜ e 𝑔˜ terminam no mesmo
ponto em 𝐸 e são homotópicas por caminho.
Definição 4.12. Sejam 𝑝 : 𝐸 → 𝐵 um recobrimento e 𝑏0 ∈ 𝐵.
Escolha 𝑒0 tal que 𝑝(𝑒0 ) = 𝑏0 . Dado um elemento 𝑓 do grupo
92
Capítulo 4. GRUPO FUNDAMENTAL
fundamental de 𝜋1 (𝐵, 𝑏0 ), seja 𝑓˜ um levantamento de 𝑓 para
um caminho em 𝐸 que começa em 𝑒0 . Seja 𝜑([𝑓 ]) o ponto final
𝑓˜(1) de 𝑓˜. Então, 𝜑 é uma aplicação bem definida da forma
𝜑 : 𝜋1 (𝐵, 𝑏0 ) → 𝑝−1 (𝑏0 ). Dizemos que 𝜑 é o correspondência
por levantamento derivado da aplicação de recobrimento 𝑝.
Teorema 4.7. Sejam 𝑝 : 𝐸 → 𝐵 um recobrimento e 𝑝(𝑒0 ) =
𝑏0 . Se 𝐸 é conexo por caminhos, então a correspondência por
levantamento 𝜑 : 𝜋1 (𝐵, 𝑏0 ) → 𝑝−1 (𝑏0 ) é sobrejetora. Se 𝐸 é
simplesmente conexo, então 𝜑 é bijetora.
Toda a construção precedente foi realizada para que
fosse provado o
Teorema 4.8. O grupo fundamental de 𝑆 1 é isomorfo ao grupo
aditivo dos inteiros.
Demonstração: Sejam 𝑝 : R → 𝑆 1 um recobrimento
𝑝(𝑥) = (𝑐𝑜𝑠(2𝜋𝑥), 𝑠𝑒𝑛(2𝜋𝑥)), 𝑒0 = 0 e 𝑏0 = 𝑝(𝑒0 ) = 𝑝(0) = (1, 0).
Para mostrarmos que 𝑝−1 (𝑏0 ) = Z faremos uso do teorema da
dupla inclusão.
Primeiro, mostraremos que 𝑝−1 (𝑏0 ) ⊆ Z. Seja 𝑛 ∈ 𝑝−1 (𝑏0 ),
isto é, 𝑝(𝑛)
⎧ = (𝑐𝑜𝑠(2𝑛𝜋), 𝑠𝑒𝑛(2𝑛𝜋)) = (0, 1), de onde temos o
⎨𝑐𝑜𝑠(2𝑛𝜋) = 1
sistema
que, sabemos, tem solução quando
⎩𝑠𝑒𝑛(2𝑛𝜋) = 0
𝑛 ∈ Z.
Para mostrar que Z ⊆ 𝑝−1 (𝑏0 ), dado 𝑛 ∈ Z, evidentemente 𝑝(𝑛) = (𝑐𝑜𝑠(2𝑛𝜋), 𝑠𝑒𝑛(2𝑛𝜋)) = (1, 0) = 𝑏0 o que verifica
nossa hipótese.
Como R é simplesmente conexo, pelo teorema anterior, a
correspondência por levantamento 𝜑 : 𝜋1 (𝑆 1 , 𝑏0 ) → Z é bijetora.
4.4. GRUPO FUNDAMENTAL DO CÍRCULO
93
Um isomorfismo é um homomorfismo bijetor, então, falta
mostrar que 𝜑 é um homomorfismo. A aplicação 𝜑 tem como imagem os números inteiros e precisamos mostrar que 𝜑([𝑓 ] * [𝑔]) =
𝜑([𝑓 ]) + 𝜑([𝑔]) que é um número inteiro. Tome [𝑓 ] e [𝑔] em
𝜋1 (𝐵, 𝑏0 ) com 𝑓˜ e 𝑔˜ seus respectivos levantamentos para caminhos em R começando em 0. Seja 𝑛 = 𝑓˜(1) e 𝑚 = 𝑔˜(1), então
𝜑([𝑓 ]) = 𝑓˜(1) = 𝑛 e 𝜑([𝑔]) = 𝑔˜(1) = 𝑚, por definição de 𝜑.
Defina 𝑔˜ o caminho 𝑔˜ = 𝑛 + 𝑔˜ em R.
Pela periodicidade de 𝑝(𝑥), 𝑝(𝑛 + 𝑥) = (𝑐𝑜𝑠(2𝜋(𝑛 +
𝑥)), 𝑠𝑒𝑛(2𝜋(𝑛 + 𝑥))) = 𝑝(𝑥), portanto, 𝑝 ∘ 𝑔˜ = 𝑝(𝑛 + 𝑔˜) =
𝑝 ∘ 𝑔˜ = 𝑔 para todo 𝑥 ∈ R, o caminho 𝑔˜ é um levantamento
para 𝑔 que começa em 𝑛. Então, o produto 𝑓˜ * 𝑔˜ é definido
pois, 𝑓˜(1) = 𝑛 = 𝑛 + 𝑔˜(0) = 𝑔˜(0) e começa em 𝑓˜(0) = 0 e, é
um levantamento para 𝑓 * 𝑔, que começa em 0, pelo fato de que
𝑝∘(𝑓˜* 𝑔˜) = 𝑝∘ 𝑓˜*𝑝∘ 𝑓˜ = 𝑓 *𝑔. Além disto, 𝑔˜(1) = 𝑛+˜
𝑔 (1) = 𝑛+𝑚.
Por definição de 𝜑, 𝜑([𝑓 ] * [𝑔]) é um levantamento de 𝑓 * 𝑔 que
começa em 0 aplicado em 1.
Pela construção precedente um⎧levantamento de 𝑓 * 𝑔
⎨𝑓˜(𝑠), se 𝑠 ∈ [0, 1 ],
2
,
que começa em 0 é 𝑓˜ * 𝑔˜. Mas 𝑓˜ * 𝑔˜ =
⎩𝑔˜(𝑠), se 𝑠 ∈ [ 1 , 1].
2
ou seja, 𝑓˜ * 𝑔˜(1) = 𝑔˜(1) = 𝑛 + 𝑔˜(1) = 𝑛 + 𝑚 = 𝜑([𝑓 ]) + 𝜑([𝑔]),
como desejado.
O teorema precedente mostra que podemos associar cada
caminho fechado 𝑓 no círculo a um número 𝑛(𝑓 ), chamado grau
de 𝑓 , de forma que dois caminhos são homotópicos se, e somente
se, têm o mesmo grau.
94
Capítulo 4. GRUPO FUNDAMENTAL
4.5 TEOREMA FUNDAMENTAL DA ÁLGEBRA
Demonstrar o Teorema Fundamental da Álgebra é apenas uma das aplicações da grupo fundamental do círculo. No
entanto, antes de demonstrá-lo é necessário a definição e alguns
resultados sobre retração e retrato.
Definição 4.13. Se 𝐴 ⊂ 𝑋, uma retração de 𝑋 em 𝐴 é uma
aplicação contínua 𝑟 : 𝑋 → 𝐴 tal que 𝑟|𝐴 é a aplicação identidade em 𝐴. Se tal aplicação 𝑟 existe, dizemos que 𝐴 é um retrato
de 𝑋.
Exemplo 4.7. Se 𝐴 ⊂ R𝑛 , a aplicação identidade em R𝑛 e um
retrato de R𝑛 .
Lema 4.4. Se 𝐴 é um retrato de 𝑋, então o homomorfismo
do grupo fundamental, 𝑗* , induzindo pela inclusão 𝑗 : 𝐴 → 𝑋 é
injetor.
Demonstração:
Se 𝑟 : 𝑋 → 𝐴 é uma retração de
𝑋, então, a aplicação composta 𝑟 ∘ 𝑗 é igual a aplicação identidade em 𝐴 (𝑟|𝐴 é a aplicação identidade em 𝐴). Segue que
(𝑟* ∘ 𝑗* )([𝑓 ]) = [(𝑟 ∘ 𝑗)(𝑓 )] = [𝑖𝑑 ∘ 𝑓 ] = [𝑓 ] é a aplicação identidade de 𝜋1 (𝐴, 𝑎), e como os classes de homotopias são bem
definidas, 𝑗* é injetora.
Teorema 4.9. Não existe nenhuma retração de 𝐵 2 em 𝑆 1 .
Demonstração: Se existisse uma retração de 𝐵 2 em
1
𝑆 , então o homomorfismo induzido pela inclusão 𝑗 : 𝑆 1 → 𝐵 2
seria injetor mas, o grupo fundamental de 𝑆 1 é não trivial e o
grupo fundamental de 𝐵 2 é trivial. Uma contradição.
4.5. TEOREMA FUNDAMENTAL DA ÁLGEBRA
95
Lema 4.5. Seja ℎ : 𝑆 1 → 𝑋 uma aplicação contínua. Então,
são equivalentes as seguintes afirmações:
1. ℎ é homotopicamente nula;
2. ℎ se estende para uma aplicação contínua 𝑘 : 𝐵 2 → 𝑋;
3. ℎ* é o homomorfismo trivial do grupo fundamental.
Corolário 4.2. A aplicação inclusão 𝑗 : 𝑆 1 → R2 − 0 é não
homotopicamente nula. A aplicação identidade 𝑖 : 𝑆 1 → 𝑆 1 é
não homotopicamente nula.
Demonstração:
𝑆 1 dada por 𝑟(𝑥) =
𝑥
||𝑥|| .
Existe uma retração de R2 − 0 em
Portanto 𝑗* é injetora e não trivial.
Da mesma forma 𝑖 é o homomorfismo identidade e portanto não
trivial.
Teorema 4.10. (Teorema Fundamental da Álgebra) Todo
polinômio de grau 𝑛 > 1 e coeficientes complexos admite ao
menos uma raiz.
Demonstração:
Iremos demonstrar o teorema por
contradição, obtendo duas aplicações homotópicas mas cujos
grupos fundamentais não coincidem. A demosntração ocorrerá
em 4 etapas.
1) Considere a aplicação 𝑓 : 𝑆 1 → 𝑆 1 dada por 𝑓 (𝑧) =
𝑧 𝑛 , onde 𝑧 ∈ C e |𝑧| = 1. Vamos mostrar que o homomorfismo induzido pelo grupo fundamental 𝑓* é injetor. Seja 𝑝0 : 𝐼 → 𝑆 1 um
laço em 𝑆 1 , dado como 𝑝0 (𝑠) = 𝑒2𝜋𝑖𝑠 = (𝑐𝑜𝑠2𝜋𝑠, 𝑠𝑒𝑛2𝜋𝑠). Sua
imagem sob 𝑓* é o laço 𝑓 (𝑝0 (𝑠)) = (𝑒2𝜋𝑖𝑠 )𝑛 = (𝑐𝑜𝑠2𝜋𝑛𝑠, 𝑠𝑒𝑛2𝜋𝑛𝑠).
O laço 𝑓 ∘ 𝑝0 corresponde a um inteiro 𝑛 sob o isomorfismo usual
96
Capítulo 4. GRUPO FUNDAMENTAL
de 𝜋1 (𝑆 1 , 𝑏0 ) com Z, onde 𝑝0 corresponde ao número 1. Portanto 𝑓* é a "multiplicação por 𝑛"no grupo fundamental de 𝑆 1 ,
em particular 𝑓* é injetora.
2) Agora vamos mostrar que se 𝑔 : 𝑆 1 → R2 − 0 é a
aplicação 𝑔(𝑧) = 𝑧 𝑛 então 𝑔 é não homotopicamente nula (logo,
seu grupo fundamental é não trivial). A aplicação 𝑔 é igual a
aplicação 𝑓 do passo anterior seguida pela aplicação de inclusão
𝑗 : 𝑆 1 → R − 0, ou seja, 𝑔 = 𝑗 ∘ 𝑓 . Desta forma, 𝑗* é injetora
porque 𝑆 1 é um retrato de R2 − 0. Pelo Teorema (4.3), 𝑔* =
𝑗* ∘ 𝑓* que é a composição de aplicações injetoras, e portanto,
𝑔* é injetora. Daí tem-se pelo Lema (4.5) que 𝑔 não pode ser
homotopicamente nula.
3) Considere o polinômio 𝑘(𝑧) = 𝑧 𝑛 + 𝑎𝑛−1 𝑧 𝑛−1 + . . . +
𝑎1 𝑧 + 𝑎0 . Agora, vamos provar um caso especial do teorema.
Assuma que |𝑎𝑛−1 | + . . . + |𝑎1 | + |𝑎0 | < 1. Suponha que esta
equação não possui raiz. Então, a aplicação 𝑘 : 𝐵 2 → R2 − 0 da
forma 𝑘(𝑧) = 𝑧 𝑛 + 𝑎𝑛−1 𝑧 𝑛−1 + . . . + 𝑎1 𝑧 + 𝑎0 está bem definida.
Seja ℎ a restrição de 𝑘 a 𝑆 1 . Como ℎ extende a aplicação da bola
unitária para R2 − 0, ℎ é uma aplicação homotopicamente nula
(Lema 4.5). Por outro lado, definiremos uma homotopia 𝐹 entre
as aplicações 𝑔 e ℎ como 𝐹 (𝑧, 𝑡) = 𝑧 𝑛 + 𝑡(𝑎𝑛−1 𝑧 𝑛−1 + . . . + 𝑎0 ).
Esta aplicação é uma homotopia entre 𝑔 e ℎ, pois é contínua,
𝐹 (0, 𝑧) = 𝑧 𝑛 = 𝑔(𝑧), 𝐹 (1, 𝑧) = 𝑧 𝑛 + 𝑎𝑛−1 𝑧 𝑛−1 + . . . + 𝑎0 = ℎ(𝑧) e
é bem definida para todo 𝑡 uma vez que 𝐹 (𝑧, 𝑡) nunca será igual
a zero pois,
|𝐹 (𝑧, 𝑡)| ≥ |𝑧 𝑛 | − |𝑡(𝑎𝑛−1 𝑧 𝑛−1 + . . . + 𝑎0 )| ≥
1 − 𝑡(|𝑎𝑛−1 𝑧 𝑛−1 | + . . . + |𝑎0 |) =
1 − 𝑡(|𝑎𝑛−1 | + . . . + |𝑎0 |) > 0.
4.5. TEOREMA FUNDAMENTAL DA ÁLGEBRA
97
Assim, 𝑔 e ℎ podem ser deformadas continuamente uma
na outra, sem passar pelo zero, mas ℎ é homotopicamente nula e
𝑔 é não homotopicamente nula, o que é uma contradição. Assim,
o polinômio deve conter ao menos uma raiz.
4) Agora vamos provar o caso geral. Seja 𝑐 ∈ R e tome
𝑥 = 𝑐𝑦. Então a equação polinomial
𝑥𝑛 + 𝑎𝑛−1 𝑥𝑛−1 + . . . + 𝑎0 = 0
se torna
(𝑐𝑦)𝑛 + 𝑎𝑛−1 (𝑐𝑦)𝑛−1 + . . . + 𝑎1 (𝑐𝑦) + 𝑎0 = 0
ou
𝑎1
𝑎0
𝑎𝑛−1 𝑛−1
𝑦
+ . . . + 𝑛−1 𝑦 + 𝑛 = 0.
𝑐
𝑐
𝑐
Se, esta equação possui uma raiz 𝑦 = 𝑦0 , então a equação ori𝑦𝑛 +
ginal possui uma raiz 𝑥0 = 𝑐𝑦0 . Assim, basta tomar 𝑐 grande o
bastante para que
|
𝑎𝑛−1
𝑎𝑛−2
𝑎1
𝑎0
| + | 2 | + . . . + | 𝑛−1 | + | 𝑛 | < 1.
𝑐
𝑐
𝑐
𝑐
Se |𝑎𝑛−1 | + . . . + |𝑎1 | + |𝑎0 | < 1 a existência da raiz já foi
𝑛−1
∑︀
provada. Caso |𝑎𝑛−1 | + . . . + |𝑎1 | + |𝑎0 | ≥ 1 tome 𝑐 = 1 +
|𝑎𝑖 |
𝑖=0
e teremos que
|𝑎𝑛−1 |+...+|𝑎1 |+|𝑎0 |
𝑐
< 1, em particular, como 𝑐 > 1,
temos que
|
𝑎𝑛−1
𝑎𝑛−2
𝑎1
𝑎0
| + | 2 | + . . . + | 𝑛−1 | + | 𝑛 | < 1.
𝑐
𝑐
𝑐
𝑐
Agora, fatorando este polinômio utilizando a raiz encontrada, obteremos um polinômio de grau 𝑛 − 1, ao qual podemos
98
Capítulo 4. GRUPO FUNDAMENTAL
aplicar novamente o teorema. Assim, todo polinômio não constante de grau 𝑛 e com coeficientes complexos possui exatamente
𝑛 raízes, não necessariamente distintas.
99
CONCLUSÃO
Quando se estuda determinado espaço topológico, é em
geral, muito simples trabalhar com isomorfismos a espaços já
amplamente conhecidos. Com isto, desenvolvemos alguns invariantes topológicos, mas que se mostraram insuficientes ao longo
do estudo da topologia. Desta forma, foi desenvolvida a topologia algébrica que possibilita a comparação a mais um invariante
topológico, o grupo fundamental, e também às propriedades de
grupos. O grupo fundamental mais simples é o grupo fundamental do círculo, o primeiro a ser estudado e objetivo deste trabalho.
Este grupo fundamental é isomorfo ao grupo aditivo dos inteiros,
o que nos permite provar o teorema fundamental da álgebra, e
outros resultados clássicos que ficam para estudos futuros. Com
isto, se pode associar as classes do grupo fundamental do círculo
a quantidade de voltas do laço.
O estudo feito, com base no livro de Munkres (2000), foi,
de fato, de extrema necessidade para a compreensão de cada uma
das etapas, não apenas por ser tão completo, mas pela sua fácil
compreensão, embora tenham sido usados outros livros como
apoio.
O conhecimento em análise real foi muito importante
para a compreensão das primeiras definições de topologia, bem
como o estudo de grupos para a compreensão do grupo fundamental. Quanto as dificuldades no decorrer dos estudos sobre
topologia, elas foram muitas, pouco a pouco sanadas, e seu conhecimento nos dá uma base mais sólida para iniciar os estudos
100
Conclusão
mais formais sobre tais conteúdos e também uma base para possíveis pesquisas nesta área.
101
Referências
D’AMBRóSIO, U. Métodos de topologia: introdução e aplicação.
2. ed. Rio de Janeiro: FURB, 1977. Livros técnicos e científicos.
Citado 3 vezes nas páginas 17, 78 e 86.
LIMA, E. L. Análise real. Rio de Janeiro: IMPA, 2004. Coleção
Matemática Universitária. Citado 3 vezes nas páginas 19, 40
e 49.
LIMA, E. L. Grupo fundamental e espaços de recobrimento. 3.
ed. Rio de Janeiro: IMPA, 2006. Citado 2 vezes nas páginas 78
e 81.
LIMA, E. L. Elementos de topologia geral. Rio de Janeiro:
SBM, 2009. Citado na página 17.
MUNKRES, J. R. Topology. 2. ed. [S.l.]: Prentice Hall, 2000.
Citado 7 vezes nas páginas 17, 21, 26, 63, 78, 87 e 91.