Cálculo das Probabilidades I
Departamento de Estatistica
Primeira Edição - 2008
Sumário
iii
Capítulo 1
Introdução a Probabilidade
Objetivo: O objetivo da teoria da Probabilidade é criar modelos teóricos que reproduzam de
maneira razoável a distribuição de freqüências de fenômenos(experimentos) aleatórios de interesse. Tais modelos são chamados modelos probabilísticos.
Definição 1.1 (Experimento aleatório). Um experimento que pode fornecer diferentes resultados,
muito embora seja repetido toda vez da mesma maneira, é chamado experimento aleatório.
Características de um experimento aleatório:
• Imprevisibilidade: o resultado do experimento não pode ser conhecido a priori;
• É conhecido o conjunto de todos os resultados possíveis do experimento;
Exemplos de experimentos aleatórios
(E1) Lançar uma moeda uma vez. Anota-se o resultado;
(E2) Lançar uma moeda duas vezes. Anota-se a seqüência obtida;
(E3) Lançar uma moeda duas vezes. Anota-se o número de caras obtido;
(E4) Numa linha de produção conta-se o número de peças defeituosas num dia de trabalho;
(E5) Uma urna contém duas bolas brancas e três bolas vermelhas. Retira-se uma bola ao acaso da
urna. Se for branca, lança-se uma moeda; se for vermelha, ela é devolvida à urna e retira-se
outra bola. Anota-se o resultado obtido.
Definição 1.2 (Espaço amostral). É o conjunto de todos os resultados possíveis de um experimento
aleatório. Notação: Ω
Cada resultado possível é denominado ponto ou elemento de Ω e denotado genericamente por
ω. Assim, escrevemos ω ∈ Ω para indicar que o elemento ω está em Ω.
Exemplos de espaço amostral:
(E1) Ω = c , r , em que c=cara e r=coroa;
1
(E2) Ω = (c , c ), (c , r ), (r, c ), (r, r ) ;
(E3) Ω = 0, 1, 2 ;
(E4) Ω = 0, 1, 2, . . . ;
(E5) Ω = (B, c ), (B, r ), (V, B ), (V, V ) , em que B=bola branca, V=bola vermelha;
Definição 1.3. Sejam A e B dois conjuntos. Então diz-se que A é um subconjunto de B se, e somente
se ω ∈ A implicar ω ∈ B . Notação: A ⊂ B .
Observação 1.1. Da Definição ?? segue que A ⊂ A, pois ω ∈ A implicar ω ∈ A.
Observação 1.2. Se A não é um subconjunto de B , então existe pelo menos um ω ∈ A tal que ω ∈
/ B.
Notação: A * B .
Definição 1.4 (Igualdade de conjuntos). Sejam A e B dois conjuntos. Então diz-se que A = B se, e
somente se, A ⊂ B e B ⊂ A, isto é, ω ∈ A implicar ω ∈ B e ω ∈ B implicar ω ∈ A.
Observação 1.3. Se A não é igual a B , então existe pelo menos um ω ∈ A tal que ω ∈
/ B ou um ω ∈ B
tal que ω ∈
/ A.
Definição 1.5 (Evento). É um subconjunto do espaço amostral Ω.
Os subconjuntos de Ω serão denotados por letras latinas maiúsculas (A,B,C,. . . ). Se A é um
subconjunto de Ω então denotamos A ⊂ Ω.
Exemplo 1.1. Considere o experimento aleatório (E2). Seja A=Obtenção de faces iguais. Portanto,
A = (c , c ), (r, r ) ;
Observação 1.4. Diz-se que "‘ocorre o evento A"’ quando o resultado do experimento aleatório for
um elemento de A.
Observação 1.5. O espaço amostral Ω e o conjunto vazio ∅ também são eventos, em que Ω é o evento
certo e ∅ é o evento impossível.
Operações básicas entre conjuntos
Sejam A ⊂ Ω e B ⊂ Ω, então:
• Complementar: A c = ω ∈ Ω : ω ∈
/A ;
• Interseção: A ∩ B = ω ∈ Ω : ω ∈ A e ω ∈ B ;
• União: A ∪ B = ω ∈ Ω : ω ∈ A ou ω ∈ B = ω ∈ Ω : ω a pelo menos um dos eventos ;
• Diferença: A − B = ω ∈ Ω : ω ∈ A e ω ∈
/ B , deste modo segue que A − B = A ∩ B c ;
• Diferença simétrica: A∆B = ω ∈ Ω : ω ∈ A e ω ∈
/ B ou ω ∈
/ A e ω ∈ B , deste modo segue
que A∆B = (A ∩ B c ) ∪ (A c ∩ B ).
Definição 1.6 (Eventos disjuntos). Dois eventos são disjuntos se e somente se A ∩ B = ∅.
Observação 1.6. Da Definição ?? segue que o conjunto vazio é disjunto de qualquer outro evento,
pois para todo evento A tem-se que A ∩ ∅ = ∅.
Definição 1.7 (Partição de um evento). Seja A um subconjunto de Ω. Então A 1 , . . . , A n formam uma
partição de A se e somente se A i ∩ A j = ∅ para todo i 6= j e ∪ni=1 A i = A.
Deste modo, se A = Ω então A 1 , . . . , A n formam uma partição de Ω se e somente se A i ∩ A j = ∅
para todo i 6= j e ∪ni=1 A i = Ω.
Definição 1.8 (Espaço Produto). Sejam Ω1 e Ω2 dois espaços amostrais. Então o espaço produto
Ω = Ω1 × Ω2 é dado por,
n
o
Ω1 × Ω2 = (ω1 , ω2 ) : ω1 ∈ Ω1 e ω2 ∈ Ω2
Observação 1.7. Se Ω1 = Ω2 = Ω então o espaço produto Ω1 × Ω2 é denotado por Ω2 .
Definição 1.9 (Produto entre eventos). Sejam A ⊂ Ω1 e B ⊂ Ω2 . Então o evento produto, denotado
por A × B é dado por,
n
o
A × B = (ω1 , ω2 ) ∈ Ω : ω1 ∈ A e ω2 ∈ B
1.1
Propriedades das operações entre conjuntos(eventos)
Sejam A, B,C subconjuntos de Ω, então:
1. A ⊂ A ∪ B e B ⊂ A ∪ B ;
2. A ∩ B ⊂ A e A ∩ B ⊂ A;
3. A ⊂ B ⇔ A ∪ B = B ;
4. A ⊂ C e B ⊂ C ⇔ A ∪ B ⊂ C ;
5. Idempotente: A ∪ A = A e A ∩ A = A;
6. Distributiva:
• A ∪ (B ∩ C ) = (A ∪ B ) ∩ (A ∪ C );
• A ∩ (B ∪ C ) = (A ∩ B ) ∪ (A ∩ C );
• A ∪ (B − C ) = (A ∪ B ) − (C − A) 6= (A ∪ B ) − (A ∪ C );
• A ∩ (B − C ) = (A ∩ B ) − (A ∩ C );
• (A − B ) − C = A − (B ∪ C ) 6= A − (B − C );
• A − (B ∪ C ) = (A − B ) ∩ (A − C ) 6= (A − B ) ∪ (A − C );
• A − (B ∩ C ) = (A − B ) ∪ (A − C ) 6= (A − B ) ∩ (A − C );
• A ∩ (B ∆C ) = (A ∩ B )∆(A ∩ C );
• A ∪ (B ∆C ) = (A ∪ B ∪ C ) − (A c ∩ B ∩ C ) 6= (A ∪ B )∆(A ∪ C );
7. Comutativa:
• A ∪ B = B ∪ A;
• A ∩ B = B ∩ A;
• A∆B = (A − B ) ∪ (B − A) = (B − A) ∪ (A − B ) = B ∆A = A ∪ B − A ∩ B ;
• A − B 6= B − A, pois A − B = A ∩ B c e B − A = A c ∩ B ;
8. Associativa:
• (A ∪ B ) ∪ C = A ∪ (B ∪ C );
• (A ∩ B ) ∩ C = A ∩ (B ∩ C );
• (A∆B )∆C = A∆(B ∆C );
• (A − B ) − C 6= A − (B − C ), pois
(A − B ) − C = (A ∩ B c ) ∩ C c = A ∩ (B c ∩ C c ) = A ∩ (B ∪ C )c = A − B ∪ C
e
A − (B − C ) = A ∩ (B ∩ C c )c = A ∩ (B c ∪ C ) = (A ∩ B c ) ∪ (A ∩ C ) = (A − B ) ∪ (A ∩ C ).
9. Identidade: A ∪ ∅ = A, A ∩ Ω = A e A ∪ Ω = Ω, A ∩ ∅ = ∅;
10. Complemento: A ∪ A c = Ω, A ∩ A c = ∅ e (A c )c = A, Ωc = ∅ e ∅c = Ω.
Proposição 1.1 (Leis de De Morgan). Sejam A 1 , . . . , A n tal que A i ⊂ Ω para todo i, então:
c
(i) ∪ni=1 A i = ∩ni=1 A ci Imterpretação: o complementar da ocorrência de pelo menos um dos eventos é a não ocorrência de todos os eventos;
c
(ii) ∩ni=1 A i = ∪ni=1 A ci . Imterpretação: o complementar da ocorrência de todos os eventos é a não
ocorrência de pelo menos um dos eventos.
Demonstração. Para
que:
(i) tem-se
c
Para todo ω ∈ ∪ni=1 A i tem-se que ω ∈
/ ∪ni=1 A i , logo ω ∈
/ A i para todo i, pois se ω ∈ A i para
n
c
algum i então ω ∈ ∪i =1 A i . Conseqüentemente ω ∈ A i para todo i, portanto ω ∈ ∩ni=1 A ci . Logo,
c
(1.1)
∪ni=1 A i ⊂ ∩ni=1 A ci .
Por outro lado tem-se que, para todo, ω ∈ ∩ni=1 A ci implica que ω ∈ A ci para todo i. Logo ω ∈
/ Ai
c
n
n
para todo i. Conseqüentemente, ω ∈
/ ∪i =1 A i . Deste modo, ω ∈ ∪i =1 A i . Nestas condições segue
que,
c
∩ni=1 A ci ⊂ ∪ni=1 A i
(1.2)
Logo, de (??) e (??)
segue a igualdade (i). Para (ii) tem-se que:
c
Para todo ω ∈ ∩ni=1 A i implica que ω ∈
/ ∩ni=1 A i . Logo, ω ∈
/ A i para pelo menos um i, conc
n
seqüentemente ω ∈ A i para pelo menos um i. Portanto, ω ∈ ∪i =1 A ci . Assim,
c
∩ni=1 A i ⊂ ∪ni=1 A ci .
(1.3)
Por outro lado tem-se que, para todo, ω ∈ ∪ni=1 A ci implica que ω ∈ A ci para pelo menos um i. Con
c
seqüentemente, ω ∈
/ A i para pelo menos um i, portanto ω ∈
/ ∩ni=1 A i , logo, ∩ni=1 A i . Assim,
c
∪ni=1 A ci ⊂ ∩ni=1 A i .
(1.4)
De (??) e (??) segue a igualdade (ii).
1.2
Função indicadora
Definição 1.10 (Função indicadora). Seja A ⊂ Ω, então
(
1 se ω ∈ A
I A (ω) =
0 se ω ∈
/A
Propriedades da função indicadora
Sejam A ⊂ Ω e B ⊂ Ω, então:
(i) I A c (ω) = 1 − I A (ω);
(ii) I A∪B (ω) = I A (ω) + I B (ω) − I A (ω)I B (ω) = min I A (ω), I B (ω) ;
(iii) I A∩B (ω) = I A (ω)I B (ω) = max I A (ω), I B (ω) ;
(iv) I A−B (ω) = I A (ω)I B c (ω) e I B −A (ω) = I A c (ω)I B (ω);
(v) I A∆B (ω) = I A (ω)I B c (ω) + I A c (ω)I B (ω).
(vi) I A (ω) = I B (ω) se e somente se A = B ;
(vii) I A (ω) ≤ I B (ω) se e somente se A ⊆ B ;
Demonstração. Para (i) tem-se que: tome ω ∈ A c então I A c (ω) = 1 e I A (ω) = 0 pois ω ∈
/ A logo
c
1−I A (ω) = 1. Do mesmo, modo se ω ∈
/ A então I A c (ω) = 0 e I A (ω) = 1 pois ω ∈ A logo 1−I A (ω) = 0.
Por outro lado, se ω ∈ A então I A (ω) = 1 e I A c (ω) = 0 pois ω ∈
/ A c . Do mesmo, modo se ω ∈
/A
c
então I A (ω) = 0 e I A c (ω) = 1 pois ω ∈ A . Logo, I A c (ω) = 1 − I A (ω).
1.3
Álgebra e Sigma álgebra
Definição 1.11 (Álgebra). Seja Ω um conjunto não vazio. Uma classe A de subconjuntos de Ω,
satisfazendo:
(A1) Ω ∈ A ;
(A2) Se A ∈ A então A c ∈ A ;
(A3) Se A ∈ A e B ∈ A então A ∪ B ∈ A ;
é denominada uma álgebra de subconjuntos de Ω.
Proposição 1.2. Seja A uma álgebra de subconjuntos de Ω. Então, valem as seguintes propriedades:
(A4) ∅ ∈ A ;
(A5) A é fechada para uniões e intersecções finitas, isto é, se A 1 ∈ A , . . . , A n ∈ A então ∪ni=1 A i ∈ A
e ∩ni=1 A i ∈ A .
Demonstração. (A4) é direto visto que o complementar de Ω é ∅.
k
Para (A5)
tem-se
S por indução que, A 1 ∪ A 2 ∈ A . Agora suponha que ∪i =1 A i ∈ A , assim,
+1
+1
∪ki =1
A i = ∪ki=1 A i
A k +1 . Deste modo, como ∪ki=1 A i ∈ A e A k +1 ∈ A segue que ∪ki =1
Ai ∈ A .
Logo, vale a relação para todo n finito.
Para a segunda parte de (A5) tem-se que: como A 1 ∈ A , . . . , A n ∈ A segue por (A2) que A c1 ∈
A , . . . , A cn ∈ A , portanto da primeira parte de (A5) segue que ∪ni=1 A ci ∈ A . Agora de (A2) segue que
c
c
∪ni=1 A ci ∈ A . Mas da lei de Morgan sabe-se que ∪ni=1 A ci = ∩ni=1 A i .
Exemplo 1.2. Exemplos de álgebras:
1. A = {∅, Ω}, esta é a álgebra trivial;
2. A = {A, A c , ∅, Ω}, para Ω = A ∪ A c ;
3. Seja Ω = {ω1 , ω2 , ω3 } então A = {ω1 , ω2 , ω3 , {ω1 , ω2 }, {ω1 , ω3 }, {ω2 , ω3 }, ∅, Ω} é uma álgebra
de subconjuntos de Ω. Neste caso, A é chamado de álgebra das partes de Ω e é denotado por
P.
Exemplo 1.3. Seja Ω infinito, enumerável ou não, e seja C uma classe de subconjuntos de Ω que são
finitos ou cujos complementos são finitos, isto é, C = {A ⊂ Ω : A ou A c é finito}. Prove que C é uma
álgebra.
Demonstração. De fato, pois:
1. Ωc = ∅ que é finito, portanto, Ω ∈ C ;
2. Seja A ∈ C , logo A ou A c é finito. Se A é finito segue que A c ∈ C pois A c
é finito, então A c ∈ C ;
c
= A é finito. Se A c
3. Seja A ∈ C e B ∈ C ,logo A ou A c é finito e B ou B c é finito, assim:
• Se A e B forem finitos segue que A ∪ B é finito, portanto A ∪ B ∈ C ;
c
• Se A ou B ou ambos forem infinitos então A ∪ B = A c ∩ B c é finito pois A c ou B c ou
ambos são finitos. Logo A ∪ B ∈ C .
Definição 1.12 (σ-Álgebra). Uma classe F de subconjuntos de Ω é denominada uma σ-álgebra se
ela satisfaz:
(F1) Ω ∈ F ;
(F2) Se A ∈ F então A c ∈ A ;
(F3) Se A i ∈ F para todo i ≥ 1 então
S∞
i =1
Ai ∈ F ;
Observação 1.8. Da Definição ?? segue que:
1. Toda σ-álgebra é uma álgebra;
2. Nem toda álgebra é uma σ-álgebra.
Observação 1.9. O par (Ω, F ) é chamado de espaço mensurável.
1.4
Medida de Probabilidade
Definição 1.13 (Definição Clássica). Seja (Ω, F ) um espaço finito de eventos equiprováveis. Assim,
para todo A ∈ F tem-se que,
#A
P(A) =
#Ω
em que # é o número de elementos do conjunto.
Exemplo 1.4. Considere o experimento aleatório (E2). Seja A=Obtenção de faces iguais. Portanto,
A = (c , c ), (r, r ) . Deste modo,
2
P(A) = = 0, 5.
4
1.4.1
Alguns conceitos básicos de Contagem
Nesta seção vamos apresentar os princípios aditivo e multiplicativo e mostrar como a aplicação destes princípios podem ser feitas para obter as fórmulas de permutação, arranjo e combinação.
Pn
Definição 1.14 (Princípio Aditivo). Sejam A 1 , . . . , A n uma partição, então # ∪ni=1 A i = i =1 a i . Se
A 1 , . . . , A n for uma partição de Ω então # ∪ni=1 A i = #Ω = n , em que n é número de elementos de Ω.
Da Definição ?? segue que, se A = ∪ni=1 A i então,
Pn
P(A) =
i =1
n
ai
.
Exemplo 1.5. Numa confeitaria há 5 sabores de picolés e 3 sabores de salgados. Suponha que Maria
só tenha permissão para tomar um picolé ou comer um salgado. Quantos são os possíveis pedidos
de Maria?
Solução: Tem-se os seguintes eventos: Ω = {P1 , . . . , P5 ,S 1 ,S 2 ,S 3 },
A 1 = {ω ∈ Ω : ω = p i col } e A 2 = {ω ∈ Ω : ω = s a l g a d o}
Assim, o evento A ="‘tomar um picolé ou comer um salgado"’ é A = A 1 ∪ A 2 . Logo, tem-se que Maria
pode escolher entre #A 1 ∪ A 2 = 5 + 3 = 8 pedidos possíveis.
Exemplo 1.6. Uma caixa contém quatro lâmpadas de 40 W , cinco de 60 W e seis de 75 W . Uma
lâmpada é sorteada ao acaso, qual a probabilidade que seja uma lâmpada de 40 W ou 75 W ?
Solução: Tem-se os seguintes eventos: Ω = {L401 , . . . , L404 , L601 , . . . , L605 , L751 , . . . , L756 },
A 1 = {ω ∈ Ω : ω = L40i , i = 1, . . . , 4} e A 2 = {ω ∈ Ω : L75 j , j = 1, . . . , 6}
Portanto,
P(A 1 ∪ A 2 ) =
4+6 2
= .
15
3
Definição 1.15 (Princípio Multiplicativo). Sejam A 1 , . . . , A n n eventos em que A i ∈ Ωi . Se cada evento
A i pode ocorrer de m i maneiras diferentes. Então esses n eventos podem ocorrer em sucessão de
m 1 ×· · ·×m n maneiras diferentes, isto é, o evento produto A 1 ×· · ·×A n tem cardinalidade m 1 ×· · ·×m n .
Exemplo 1.7. Suponha mo exemplo anterior que Maria tenha permissão para tomar um picolé e
comer um salgado. Quantos são os possíveis pedidos de Maria, neste caso?
Solução: Tem-se os seguintes eventos: Ω = {P1 , . . . , P5 ,S 1 ,S 2 ,S 3 },
A 1 = {ω ∈ Ω : ω = p i col } e A 2 = {ω ∈ Ω : ω = s a l g a d o}
Assim, o evento A ="‘tomar um picolé e comer um salgado"’ é A = A 1 × A 2 . Logo, tem-se que Maria
pode escolher entre #A 1 × A 2 = 5 × 3 = 15 pedidos possíveis.
Vamos agora mostrar como combinar os dois princípios.
Exemplo 1.8. Um amigo mostrou-me 5 livros diferentes de Matemática, 7 livros diferentes de Física
e 10 livros diferentes de Química e pediu-me para escolher 2 livros com a condição de que eles não
fossem da mesma matéria. De quantas maneiras eu posso escolhê-los?
Solução: Tem-se os seguintes eventos: A 1 = {M 1 , . . . , M 5 }, A 2 = {F1 , . . . , F7 } e A 3 = {Q 1 , . . . ,Q 10 }.
Agora note que posso fazer as seguintes escolhas: A 1 × A 2 ou A 1 × A 3 ou A 2 × A 3 . Logo,
#(A 1 × A 2 ) ∪ (A 1 × A 3 ) ∪ (A 2 × A 3 ) = #(A 1 × A 2 ) + #(A 1 × A 3 ) + #(A 2 × A 3 )
= 5 × 7 + 5 × 10 + 7 × 10 = 155.
Exemplo 1.9. No Exemplo ??, suponha que duas lâmpadas sejam selecionadas ao acaso, qual a
probabilidade que:
(a) Exatamente duas sejam de 75 W ?
Solução: Seja,
Ω1 = {L401 , . . . , L404 , L601 , . . . , L605 , L751 , . . . , L756 }
e
Ω2 = {L401 , . . . , L404 , L601 , . . . , L605 , L751 , . . . , L755 },
com A 1 = {L75}, # A 1 = 6 e A 2 = {L75} e # A 2 = 5.. Assim, tem-se que # A 1 × A 2 = 6 ∗ 5 = 30 e
# Ω1 × Ω2 = 15 ∗ 14 = 210,
1
30
= .
P(A 1 × A 2 ) =
210 7
(b) Sair uma de 40 W e uma de 60 W ? (combinando os dois princípios)
Solução: Seja,
Ω1 = {L401 , . . . , L404 , L601 , . . . , L605 , L751 , . . . , L756 },
# Ω1 = 15,
Ω2 = {L401 , . . . , L403 , L601 , . . . , L605 , L751 , . . . , L756 },
# Ω2 = 14 ou
Ω3 = {L401 , . . . , L404 , L601 , . . . , L604 , L751 , . . . , L756 },
# Ω3 = 14, com A 1 = {L401 , . . . , L404 } e # A 1 = 4, A 2 = {L601 , . . . , L605 } e # A 2 = 5. Assim,
”Sair uma de 40 W e uma de 60 W ” = A 1 × A 2 ou A 2 × A 1 ,
logo,
P((A 1 × A 2 ) ∪ (A 2 × A 1 )) = P(A 1 × A 2 ) + P(A 2 × A 1 ) =
5×4
4×5
+
15 × 14 15 × 14
Permutação Simples
Uma permutação de n elementos distintos é qualquer agrupamento ordenado desses objetos.
Assim, seja A i o conjunto de elementos quando da escolha do i-ésimo elemento sem reposição.
Assim, se inicialmente tivermos n elementos, então #A i = n − i + 1. Deste modo, o número de
elementos em uma permutação simples será dada por,
#(A 1 × · · · × A n ) = n × (n − 1) × · · · × 1 = n!
Notação: Pn = n!.
Exemplo 1.10. Considere uma urna com 5 bolas numeradas de 1 a 5 e seja o seguinte experimento:
retirar 3 bolas sem reposição. Qual a probabilidade dos três números sorteados serem o 1,2 e o 3, não
necessariamente nessa da ordem? Qual a a probabilidade dos três números sorteados serem o 1,2 e
o 3, nessa da ordem?
Solução: Tem-se que A ="’os três números sorteados são o 1,2 e o 3"’. Como a ordem não importa
tem-se que #A = P3 = 3! = 6, que são as permutações simples dos 3 números. Vamos agora calcular o número de elementos de Ω. Utilizando o princípio multiplicativo tem-se que: seja A 1 =as 5
bolas numeradas, A 2 =as 4 bolas numeradas restantes depois da primeira retirada e A 3 =as 3 bolas
numeradas restantes depois da segunda retirada. Assim,
#Ω = #(A 1 × A 2 × A 3 ) = 5 × 4 × 3 = 60.
Note que nesse cálculo foi considerado as permutações simples de cada elemento. Assim,
P(A) =
6
#A
=
= 0, 1.
#Ω 60
Para o segundo caso, tem-se que: #A = 1 assim,
P(A) =
#A
1
= .
#Ω 60
Arranjos Simples
Arranjos simples de n elementos distintos tomados r a r, r ≤ n, são todos os grupos distintos(ordenados), que diferem pela ordem e pela natureza dos r elementos que compõe cada grupo.
Note que o arranjo simples é semelhante é o caso geral e a permutação simples é o caso particular
quando r = n. Assim, seja A i o conjunto de elementos quando da escolha do i-ésimo elemento
sem reposição. Assim, se inicialmente tivermos n elementos, então #A i = n − i + 1. Deste modo, o
número de elementos em um arranjo simples será dada por,
#(A 1 × · · · × A r ) = n × (n − 1) × · · · × (n − r + 1)
multiplicando em cima e em baixo por (n − r )! obtém-se,
#(A 1 × · · · × A r ) =
n!
n × (n − 1) × · · · × (n − r + 1) × (n − r )!
=
.
(n − r )!
(n − r )!
Notação: A rn = (nn!
.
−r )!
Combinações Simples
Combinações simples de n elementos distintos tomados r a r, r ≤ n, são todos os grupos não
ordenados de p elementos que diferem entre si apenas pela natureza dos elementos e não pela
ordem. Deste modo, basta dividir o número de arranjos simples tomados r a r pelo número de
permutações r a r. Assim,
A rn
n!
n
=
=
Pr
r !(n − r )!
r
n
Notação: C nr =
.
r
Observação 1.10. Note que
C nr
n
n
=
=
= C nn−r .
r
n −r
Os valores C nr são chamados de coeficientes binomiais, por causa do fato que,
(a + b )n =
n
X
C nr a r b n −r .
r =0
Definição 1.16. Seja (Ω, F ) um espaço não enumerável, com Ω ⊂ Rn , n ≥ 1. Então, para todo A ∈ F
segue que a probabilidade de A é dada por,
P(A) =
|A|
|Ω|
em que || poderá ser: um comprimento, uma área, um volume, etc. Esse é o conceito geométrico de
probabilidade.
Exemplo 1.11. Um ponto (a ,b ) é escolhido aleatóriamente no quadrado definido por −1 ≤ x ≤ 1 e
−1 ≤ y ≤ 1. Qual a probabilidade que a equação a z + b = 0 tenha solução positiva.
Solução: Note que,
−b
z=
≥0
a
se e somente se (a ,b ) ∈ [−1, 0) × [0, 1] ou (a ,b ) ∈ (0, 1] × [−1, 0]. Assim, |Ω| = 2 × 2 = 4 e |A| = 1 × 1 +
1 × 1 = 2. Portanto,
2
P(A) = = 0, 5.
4
Definição 1.17. Seja Ω um espaço amostral de um experimento aleatório. Seja n repetições independentes de um experimento aleatório e n A o número de ocorrências do evento A ⊂ Ω. Então, a
probabilidade de A é dada por,
nA
P(A) = lim
n →∞ n
Esse é o conceito frequencista de probabilidade.
Definição 1.18. Seja (Ω, F ) um espaço mensurável. Então uma função P : F → [0, 1] é uma probabilidade se,
(P1) P(Ω) = 1;
(P2) Para todo A ∈ F tem-se P(A) ≥ 0;
(P3) P é σ-aditiva, isto é, se A 1 , A 2 , . . . , são dois a dois disjuntos então,
!
∞
∞
X
[
P
An =
P(A n ).
n =1
n =1
Esta é a definição axiomática devida a Kolmogorov. A trinca (Ω, F , P) é chamada de espaço de
probabilidade.
Observação 1.11. Note que de um modo geral a medida de probabilidade P não precisa assinalar
uma probabilidade para todo evento, isto é, não precisa ter uma probabilidade associada a todo
ponto amostral de Ω, mas apenas para os eventos em F .
n
o
Exemplo 1.12. Seja Ω = 1, 2, 3 e considere a σ-álgebra das partes,
n
o
P = ∅, Ω, {1}, {2}, {3}, {1, 2}, {1, 3}, {2, 3}
n
o
e uma outra σ-álgebra F = ∅, Ω, {3}, {1, 2} . Seja P1 a medida de probabilidade em (Ω, P ) dada
por
2
1
P1 ({1}) = P1 ({2}) = P1 ({3}) = e P1 ({1, 2}) = P1 ({1, 3}) = P1 ({2, 3}) = .
3
3
Seja P2 a medida de probabilidade em (Ω, F ) dada por P2 ({3}) = 13 e P2 ({1, 2}) = 23 . Consideremos
agora dois eventos, A = {1, 2} e B = {2, 3}, então P1 (A) = P2 (A) = 23 e P1 (B ) = 31 entretanto P2 (B ) não
está definido. Neste caso diz-se que o evento B é P -mensurável mas não é F -mensurável.
Observação 1.12. Observe que para o espaço mensurável (Ω, P ) foi definido uma probabilidade
para todo ω ∈ Ω. Note que nestes casos a probabilidade de qualquer outro evento A ∈ P é dada por,
X
P(A) =
P(ω).
n
o
ω∈Ω:ω∈A
Deste modo, se P for definida para todo ω ∈ Ω então estará bem definida para qualquer σ-álgebra
F.
Propriedades de uma medida de probabilidade
Seja (Ω, F , P), então para todo A ∈ F e B ∈ F , tem-se que:
(P4) P(A c ) = 1 − P(A).
Demonstração. De fato, como Ω = A ∪ A c e A ∩ A c = ∅ segue que,
P(Ω) = 1 = P(A ∪ A c ) = P(A) + P(A c ) ⇒ P(A c ) = 1 − P(A) ≥ 0;
(P5) P(∅) = 0, pois Ω = ∅c logo por (C1)
P(∅) = 1 − P(Ω) = 1 − 1 = 0;
(P6) P é uma função não decrescente, isto é, para todo A, B ∈ F tal que A ⊆ B tem-se que P(A) ≤
P(B ).
Demonstração. De fato, como B = (A ∩ B ) ∪ (A c ∩ B ) e A ∩ B = A pois A ⊆ B , segue que
P(B ) = P(A ∩ B ) + P(A c ∩ B ) = P(A) + P(A c ∩ B ) ≥ P(A);
| {z }
≥0
(P7) Para todo A, B ∈ F tal que A ⊆ B tem-se que P(B − A) = P(B ) − P(A); Este resultado segue
diretamente do anterior;
(P8) Para todo A, B ∈ F arbitrários tem-se que:
P(A − B ) = P(A) − P(A ∩ B ) e P(B − A) = P(B ) − P(A ∩ B ).
Demonstração. De fato, como A = (A ∩ B )∪(A ∩ B c ) = (A ∩ B )∪(A − B ) e B = (A ∩ B )∪(A c ∩ B ) =
(A ∩ B ) ∪ (B − A) segue que,
P(A) = P(A ∩ B ) + P(A − B ) e P(B ) = P(A ∩ B ) + P(B − A)
Logo,
P(A − B ) = P(A) − P(A ∩ B ) e P(B − A) = P(B ) − P(A ∩ B ).
(P9) Para todo A ∈ F tem-se que 0 ≤ P(A) ≤ 1. Este resultado segue de (P1), (P2) e (C3) e do fato
que A ⊆ Ω;
(P10) Para todo A, B ∈ F arbitrários tem-se que:
P(A ∪ B ) = P(A) + P(B ) − P(A ∩ B ).
Demonstração. De fato, como A = (A ∩ B ) ∪ (A ∩ B c ) e B = (A ∩ B ) ∪ (A c ∩ B ) tem-se que,
A ∪ B = (A ∩ B ) ∪ (A ∩ B c ) ∪ (A ∩ B ) ∪ (A c ∩ B )
= (A ∩ B ) ∪ (A ∩ B c ) ∪ (A c ∩ B ) = (A ∩ B ) ∪ (A − B ) ∪ (B − A)
Perceba que A ∩ B , A − B e B − A são disjuntos. Assim, por (P3) e (P8) segue que,
P(A ∪ B ) = P(A ∩ B ) + P(A − B ) + P(B − A)
= P(A ∩ B ) + [P(A) − P(A ∩ B )] + [P(B ) − P(A ∩ B )] = P(A) + P(B ) − P(A ∩ B ).
1.5
Probabilidade Condicional
Seja (Ω, F , P) o espaço de probabilidade para um determinado experimento aleatório. Suponha que tenhamos a priori alguma informação a respeito do resultado do experimento aleatório.
Por exemplo, suponha que saibamos que um determinado evento B ∈ F ocorreu. Isto elimina
qualquer incerteza que tínhamos a respeito da ocorrência ou não do evento B. Além do mais, esta
nova informação a respeito do experimento aleatório pode mudar as incertezas a respeito de outros eventos em F e portanto uma nova medida de probabilidade deve ser considerada. Esta nova
medida de probabilidade é também uma medida no espaço mensurável (Ω, F ), será chamada de
Probabilidade condicional.
Exemplo 1.13. Seja Ω = 1, 2, 3, 4, 5, 6 um espaço de eventos equiprováveis. Seja F = P a σ-álgebra
das partes de Ω e P a medida de probabilidade definida em (Ω, F ) assim,
P(A) =
#A
#Ω
para todo A ∈ F . Considere os seguintes eventos,
A = {1, 2, 6} e B = {2, 3, 5}.
Deste modo, tem-se que
3 1
3 1
= e P(B ) = = .
6 2
6 2
Suponha agora que tenhamos a informação que o evento B ocorreu. Essa informação poderá alterar
a probabilidade atribuída aos eventos em F . A nova medida de probabilidade será denotada por
P(.|B ). Observe que podemos considerar que temos um novo espaço amostral Ω B = B e uma nova
σ-álgebra
F B = C ⊂ B : C = A ∩ B, para algum A ∈ F .
P(A) =
Desta maneira, tem-se que F B ⊂ F , por este motivo F B é denominada uma restrição de F ao evento
B . Assim, o novo espaço de probabilidade seria B, F B , P(.|B ) . Para o exemplo acima, dado que o
evento B ocorreu, então o evento A só irá ocorrer se o evento C = {1} = A ∩ B ocorrer, assim
P(A|B ) =
#(A ∩ B ) 1
= .
#(B )
3
Entretanto, não é necessária a construção deste novo espaço de probabilidade, pois pode-se considerar apenas uma nova medida de probabilidade para o mesmo espaço mensurável (Ω, F ). Para fazer
isso, basta que a nova medida de probabilidade P(.|B ) seja válida para todo A ∈ F e não apenas
para A ∈ F B . Deste modo, para um dado evento B ∈ F tem-se
P(A) P A ∩ (B ∪ B c )
=
P(A) =
P(Ω)
P(B ∪ B c )
P(A ∩ B ) + P(A ∩ B c )
=
P(B ) + P(B c )
Nestas condições segue que, dado que o evento B ocorreu, tem-se que
P(B c ) = 0 e P(A ∩ B c ) = 0
logo pode-se definir P(.|B ) para todo A ∈ F , com segue,
P(A|B ) =
P(A ∩ B )
.
P(B )
Para o exemplo assim tem-se que,
1
P(A|B ) = .
3
Definição 1.19 (Probabilidade Condicional). Seja (Ω, F , P) um espaço de probabilidade. Seja B ∈
F um evento tal que P(B ) > 0. Então a probabilidade condicional, dado o evento B, é uma função
denotada por P(.|B ) e definida para todo A ∈ F como segue,
P(A|B ) =
P(A ∩ B )
.
P(B )
(1.5)
em que P(A|B ) é chamada a probabilidade condicional de A dado B.
Suponhamos agora que tenhamos Ω1 , F1 , P1 e Ω2 , F2 , P2 dois espaços de probabilidade e
Ω, F , P o espaço produto associado. Considere A 1 ∈ Ω1 e A 2 Ω2 , então quem seria P1 (A 1 |A 2 ) e
P2 (A 2 |A 1 ) ? Para poder utilizar a Definição ?? temos que colocar os eventos A 1 e A 2 no mesmo
espaço. Para fazer isso, vamos verificar quem seria os eventos associados no espaço produto
Ω, F , P . Note que, o evento associcado a A 1 em F é A = A 1 × Ω2 pois se ω1 ∈ A 1 então ω =
(ω1 , ω2 ) ∈ A, do mesmo modo se ω = (ω1 , ω2 ) ∈ A então ω1 ∈ A 1 , logo P(A) = P1 (A 1 ). De maneira
análoga segue que para B = Ω1 × A 2 , tem-se P(B ) = P2 (A 2 ). Note ainda que,
A ∩ B = (A 1 × Ω2 ) ∩ (Ω1 × A 2 ) = A 1 × A 2 .
Portanto, da Definição ?? tem-se que,
P1 (A 1 |A 2 ) = P(A|B ) =
P(A ∩ B ) P(A 1 × A 2 )
P(A ∩ B ) P(A 1 × A 2 )
=
e P1 (A 2 |A 1 ) = P(B |A) =
=
.
P(B )
P2 (A 2 )
P(A)
P1 (A 1 )
Lema 1.1. A função P(.|B ) é uma medida de probabilidade em (Ω, F ).
Demonstração. De fato,
1. P(Ω|B ) = 1, pois
P(Ω|B ) =
P(Ω ∩ B ) P(B )
=
= 1;
P(B )
P(B )
2. Para todo A ∈ F segue que,
P(A|B ) =
P(A ∩ B )
≥0
P(B )
pois P(B ) > 0 e P(A ∩ B ) ≥ 0;
3. Seja A 1 , A 2 , . . . ∈ F tal que A i ∩ A j = ∅ para i 6= j então,
!
S∞
S∞
∞
[
P
A ∩B
P
(A n ∩ B )
n =1 n
n=1
P
=
An B =
P(B )
P(B )
n =1
P∞
∞
P(A n ∩ B ) X
P(A n ∩ B )
=
= n =1
P(B )
P(B )
n=1
=
∞
X
P(A n |B ).
n =1
Teorema 1.1 (Regra do Produto). Seja A 1 , A 2 , . . . , A n ∈ F eventos tais que,
!
n\
−1
P
An > 0
i =1
então,
P
n
\
!
An
= P(A 1 )P(A 2 |A 1 )P(A 3 |A 1 ∩ A 2 ) · · · P(A n |A 1 ∩ A 2 ∩· · · ∩ A n −1 ).
i =1
Se A i ∈ Fi para i = 1, . . . , n então,
!
n
\
P
A n = P1 (A 1 )P2 (A 2 |A 1 )P3 (A 3 |A 1 ∩ A 2 ) · · · Pn (A n |A 1 ∩ A 2 ∩· · · ∩ A n−1 ).
i =1
Demonstração. Fazer por indução. Tem-se que P(A 1 ∩ A 2 ) = P(A 1 )P(A 2 |A 1 ) pela Definição ?? de
probabilidade condicional. Suponha que é valido para k , isto é,
−1
P(A 1 ∩· · · ∩ A k ) = P(A 1 )P(A 2 |A 1 ) × · · · × P A k ∩ki =1
Ai
e então mostrar que vale para n = k + 1. Assim, seja B k = ∩ki=1 A i , logo
P(B k ∩ A k +1 ) = P(B k )P(A k +1 |B k ).
Exemplo 1.14. Uma urna contém 2 bolas brancas, 3 pretas e 4 verdes. Duas bolas são retiradas ao
acaso sem reposição. Qual a probabilidade de que:
(a) Ambas sejam verdes?
(b) Ambas sejam da mesma cor?
Solução: Seja (Ω1 , F1 , P1 ) o espaço de probabilidade na primeira retirada com Ω1 = {b, v, p }, (Ω1 , F1 , P1 )
o espaço de probabilidade na segunda retirada com Ω2 = {b, v, p }, e Ω = Ω1 × Ω2 o espaço amostral
do experimento, assim
(a) sejam os seguintes eventos: A 1 = {v } =”retirar verde na primeira retirada” e A 2 = {v } =”retirar
verde na segunda retirada” e no espaço produto, A = A 1 × Ω2 = {(v,b ), (v, v ), (v, p )} =”retirar
verde na primeira retirada” e B = Ω1 × A 2 = {(b, v ), (v, v ), (p, v )} =”retirar verde na segunda
retirada”. Assim,
P(A 1 × A 2 ) = P(A)P(B |A) = P1 (A 1 )P2 (A 2 |A 1 ) =
4 3 1
× = .
9 8 6
(b) sejam os seguintes eventos: B i = {b } =”retirar branca na i-ésima retirada” e C i = {p } =”retirar
preta na i-ésima retirada”. O evento desejado é (A 1 × A 2 ) ∪ (B 1 × B 2 ) ∪ (C 1 × C 2 ), portanto,
P (A 1 × A 2 ) ∪ (B 1 × B 2 ) ∪ (C 1 × C 2 ) = P(A 1 × A 2 ) + P(B 1 × B 2 ) + P(C 1 × C 2 )
= P1 (A 1 )P2 (A 2 |A 1 ) + P1 (B 1 )P2 (B 2 |B 1 ) + P1 (C 1 )P2 (C 2 |C 1 )
2 1 3 2 4 3
= × + × + ×
9 8 9 8 9 8
20
5
=
=
72 18
Exemplo 1.15. Um carcereiro informa a três prisioneiros que um deles foi sorteado para ser executado no dia seguinte, enquanto que os outros dois serão libertados. O prisioneiro João Espeto se
aproxima do carcereiro e cochicha no seu ouvido, solicitando que ele lhe conte qual dos outros dois
prisioneiros será solto. O prisioneiro argumenta que isso não altera em nada a situação, visto que
pelo menos um desses prisioneiros será solto. Entretanto, o carceiro não atende seu pedido, acreditando que isto poderia dar ao João Espeto alteração nas suas expectativas de ser libertado. Você
acha que o carcereiro tem razão?
Solução: Note que neste problema temos dois espaços amostrais: o espaço amostral de quem será
sorteado para ser executado,
Ω1 = A, B,C
em que, A = o prisioneiro João Espeto será executado, e o espaço amostral sobre a informação que o
carcereiro poderá fornecer,
Ω2 = b, c
em que b = o segundo prisioneiro será solto e c = o terceiro prisioneiro será solto. Assim, o espaço
amostral do nosso problema será o espaço produto,
Ω = Ω1 × Ω2 = (A,b ), (A, c ), (B,b ), (B, c ), (C ,b ), (C , c ) .
Agora note que,
P
Do mesmo modo,
1 1 1
(A,b ) = P A P b A = × =
3 2 6
1
(A, c ) = ,
6
1
P (B,b ) = P B P b B = × 0 = 0 = P (C , c )
3
1
1
P (B, c ) = P B P c B = × 1 = = P (C ,b ) .
3
3
P
e
Nestas condições segue que, se por exemplo o carcereiro disser que o segundo prisioneiro será solto
então
1
P (A,b )
1
= 61 = = P A
P A b =
3
P b
2
.
Teorema 1.2 (Probabilidade Total). Seja {A i , i = 1, . . . , n} uma partição de Ω com P(A i ) > 0 para
todo i = 1, . . . , n . Então, para todo B ∈ F tem-se que,
P(B ) =
n
X
P(A i )P(B |A i ).
i =1
Demonstração. De fato, pois
B = B ∩ Ω = B ∩ ∪ni=1 A i ,
assim,
P(B ) = P B ∩ ∪ni=1 A i
= P ∪ni=1 (A i ∩ B )
n
n
X
X
=
P(A i ∩ B ) =
P(A i )P(B |A i ).
i =1
i =1
Exemplo 1.16. No curso de Engenharia Mecânica 5% dos homens e 2% das mulheres estão acima
dos pesos ideais. Um aluno é escolhido aleatoriamente. Sabendo-se que 60% dos alunos são homens
calcule a probabilidade que:
a) O estudante esteja acima do peso;
Solução: Seja Ω1 = {h, m } o espaço amostral relacionado ao sexo dos alunos e Ω2 = {l , f } o
espaço amostral relacionado ao peso dos alunos. Assim, o espaço amostral do experimento é
dado por Ω = Ω1 × Ω2 . Seja A 1 = {h} o evento o aluno é do sexo masculino e A 2 = { f } o evento
o aluno está acima do peso ideal. Assim,
P2 (A 2 |A 1 ) = 0, 05, P2 (A 2 |A c1 ) = 0, 02, P1 (A 1 ) = 0, 60 e P1 (A c1 ) = 0, 40
No espaço produto, o evento o aluno está acima do peso ideal é
A = Ω1 × A 2 = (A 1 ∪ A c1 ) × A 2 = (A 1 × A 2 ) ∪ (A c1 × A 2 )
assim, a probabilidade do aluno está acima do peso ideal é dada por,
P2 (A 2 ) = P(A) = P (A 1 × A 2 ) ∪ (A c1 × A 2 ) = P A 1 × A 2 + P A c1 × A 2
= P1 (A 1 )P2 (A 2 |A 1 ) + P1 (A c1 )P2 (A 2 |A c1 ) = 0, 6 × 0, 05 + 0, 4 × 0, 02 = 0, 038.
b) Seja mulher sabendo que o estudante está acima do peso.
Solução: temos que
P1 (A c1 |A 2 ) =
P(A c1 × A 2 ) P1 (A c1 )P2 (A 2 |A c1 ) 0, 4 × 0, 02
=
=
= 0, 21.
P2 (A 2 )
P2 (A 2 )
0, 038
Exemplo 1.17. Seja U1 e U2 duas urnas. A urna U1 contém 3 bolas pretas e 2 vermelhas e a urna U2
contém 4 bolas pretas e 2 vermelhas. Escolhe-se ao acaso uma urna e dela retira-se ao acaso uma
bola. Qual a probabilidade de que a bola
n seja preta?
o
Solução: Tem-se que: Ω = Ω1 × Ω2 = (u 1 , p ), (u 1 , v ), (u 2 , p ), (u 2 , v ) , em que u 1 =“bola da urna 1”,
u 2 =“bola da urna 2”, p =“bola preta” e v =“bola vermelha”. Sejam os eventos: A 1 = {u 1 }“bola da
urna 1” e A 2 = {p }“bola preta”. Do problema tem-se que: P1 (A 1 ) = P1 (A c1 ) = 0, 5, P2
O evento de interesse é (U1 ∩ P) ∪ (U2 ∩ P), assim:
P (U1 ∩ P) ∪ (U2 ∩ P) = P(U1 ∩ P) + P(U2 ∩ P), pois os eventos são disjuntos
= P(U1 )P(P|U1 ) + P(P|U2 ) =
=
1 3 1 4
× + ×
2 5 2 6
3
1 19
+ =
10 3 30
Teorema 1.3 (Fórmula de Bayes). Seja {A i , i = 1, . . . , n} uma partição de Ω com P(A i ) > 0 para todo
i = 1, . . . , n. Então, para todo B ∈ F para o qual P(B ) > 0 tem-se que,
P(A j )P(B |A j )
P(A j |B ) = Pn
P(A i )P(B |A i )
i =1
Exemplo 1.18. Do exemplo anterior, calcule a probabilidade de que dado uma bola preta tenha
sido sorteada, ela seja da urna U1 ?
Solução: Primeiro note que U1 e U2 são uma partição de Ω. Assim,
P(U1 |P) =
=
=
P(U1 )P(P|U1 )
P(U1 )P(P|U1 ) + P(U2 )P(P|U2 )
1
× 35
2
1
× 35 + 12
2
3
9
10
=
19
19
30
× 46
Definição 1.20. Sejam A, B ∈ F e ((Ω, F ), P) um espaço de probabilidade. Então A e B são independentes se
P(A|B ) = P(A) ou se P(B |A) = P(B ).
Isto é, o fato de um dos eventos ocorrer não altera a probabilidade do outro ocorrer, assim da Definição ?? de probabilidade condicional segue que,
P(A ∩ B ) = P(A)P(A|B ) = P(A|B )P(B ) = P(A)P(B ).
Exemplo 1.19. Sejam dois eventos A e B tal que P(A) = 12 , P(A|B ) =
são independes?
Solução: Os eventos A e B são independentes, pois,
1 1 1
× =
2 4 8
P(A ∩ B )
P(A ∩ B ) = P(B )P(A|B ) ⇒ P(B ) =
=
P(A|B )
1
2
e P(B |A) = 14 . Esses eventos
1
8
1
2
=
P(A ∩ B ) = P(A)P(B |A) =
P(A)P(B ) =
1
4
1 1 1
× = = P(A ∩ B )
2 4 8
Definição 1.21. Seja ((Ω, F ), P) um espaço de probabilidade e A 1 , . . . , A n eventos em F . Então os
eventos são independentes(ou completamente independentes) se,
P(A i 1 ∩ · · · ∩ A i k ) = P(A i 1 ) × . . . × P(A i k )
para k = 2, . . . , n e i 1 , . . . , i k = 1, . . . , n tal que 1 ≤ i 1 < . . . < i k ≤ n . Diz-se também que estes eventos
são dois a dois independentes se,
P(A i ∩ A j ) = P(A i )P(A j ), para todo i 6= j .
1.6
Problemas
1. Na copa do mundo de futebol em 2006, os jogos das semi-finais foram Alemanha versus
Itália e França versus Portugal. Supondo que não sabemos os resultados destes jogos, responda:
a) Qual o espaço amostral da classificação final dos quatro times?
b) Seja A o evento em que a Itália é a campeã da copa do mundo. Descreva o evento A;
c) Seja B o evento em que Portugal seja um dos finalistas. Descreva o evento B ;
d) Descreva os eventos A ∪ B e A ∩ B .
2. Considere os veículos que passam pela BR-230 na altura da UFPB, no ponto em que podem
continuar na BR-230(f ), seguir em direção à UFPB(d) ou seguir em direção ao centro pela
Pedro II(e). Considerando a direção tomada por três veículos quaisquer que passam sucessivamente, descreva os seguintes eventos:
a) Ω;
b) A = os três veículos seguem na mesma direção;
c) B = cada veículo toma uma direção diferente;
d) C = exatamente dois seguem em direção à UFPB;
e) D = exatamente dois seguem na mesma direção;
f) A ∩ B , A ∩C , A ∩ D, B ∩C , B ∩ D e C ∩ D. Quais desses eventos formam uma partição de
Ω?
3. Uma empresa de construção civil está construindo três prédios(1,2,3) em João Pessoa. Seja
A i o evento em que a empresa entrega o prédio i no prazo previsto. Descreva os eventos a
seguir em termos dos eventos dados A 1 , A 2 , A 3 e desenhe o diagrama de Venn sombreando a
região correspondente ao evento descrito.
a) B 1 = ao menos um prédio é entregue no prazo previsto;
b) B 2 = todos os prédios são entregues no prazo previsto;
c) B 3 = apenas o prédio 1 é entregue no prazo previsto;
d) B 4 = Exatamente um prédio é entregue no prazo previsto;
e) B 5 = nenhum prédio é entregue no prazo previsto;
4. Dois dados são lançados. Sejam os eventos:
A: o primeiro número é maior que o segundo;
B: o primeiro número é igual ao dobro do segundo;
C: a soma dos dois números é maior ou igual a 8.
a) Descreva o espaço amostral e os eventos A, B e C ;
b) Calcule a probabilidade dos eventos A, B e C ;
c) Calcule P(A ∩ C ), P(B ∩ C c ) e P(A|C c ).
5. Uma caixa contém fichas de duas cores sendo 4 vermelhas(v) e 3 pretas(p). Uma segunda
caixa contém 2 vermelhas(v) e 4 pretas(p). Uma ficha é selecionada aleatoriamente da primeira caixa e colocada na segunda. Em seguida uma ficha é retirada da segunda caixa.
a) Descreva o espaço amostral do experimento. Obs.: Este experimento é composto pois
são observadas duas variáveis: a cor da ficha retirada da 1a. caixa e a cor da ficha
retirada da segunda caixa.
b) Seja A o evento a segunda ficha é vermelha. Descreva o evento A e calcule a sua probabilidade.
6. Um sistema de alarme que indica quando a temperatura de uma máquina está elevada a
ponto de provocar um incêndio utiliza três sensores(1,2,3) que agem independentemente
um do outro. A probabilidade de cada sensor não funcionar é de 0,1 quando a temperatura
ultrapassa 80o C . O alarme é ativado se pelo menos um dos sensores entrar em funcionamento.
a) Descreva o espaço amostral do experimento. Obs.: o experimento é a observação do
funcionamento ou não dos sensores;
b) Seja A o evento o alarme dispara quando a temperatura ultrapassar 80o C . Descreva o
evento A c e calcule P(A) utilizando a relação entre P(A) e P(A c ).
7. Uma máquina pode parar por defeito mecânico ou elétrico. Se há defeito elétrico a probabilidade da máquina parar é de 0,3 e se há defeito mecânico a máquina para na proporção
de 1 para 4. Em 80% das vezes que a máquina é ligada não há defeito mecânico, em 10% das
vezes que a máquina é ligada há defeito elétrico. Considere que não pode ocorrer mais de
um defeito quando a máquina é ligada.
a) Descreva o espaço amostral do experimento. Obs.: Este experimento é composto pois
são observadas duas variáveis: estado da máquina e defeito. Deste modo, o espaço
amostral é o resultado de um produto de dois espaços amostrais. Um espaço amostral
é o da variável estado da máquina(parada ou em funcionamento) e o outro espaço
amostral é o da variável defeito(nenhum defeito, defeito elétrico, defeito mecânico).
b) Se a máquina parar, qual a probabilidade de ser por defeito mecânico?
c) Qual a probabilidade da máquina parar?
8. Para verificar o perfil de seus empregados o gerente de uma indústria coletou as seguintes
informações:
Homens(h)
Mulheres(m)
Menor que 25 anos(l)
20
8
Entre 25 e 40 anos(b)
45
25
Maior que 40 anos(u)
18
42
Um empregado é selecionado ao acaso:
a) Descreva o espaço amostral desse experimento;
b) Qual a probabilidade que ele seja homem ou tenha entre 25 e 40 anos de idade;
c) Qual a probabilidade que tenha mais de 40 anos e seja homem;
d) Qual a probabilidade que tenha menos de 25 anos sabendo que é mulher;
Considere agora que dois empregados são selecionados ao acaso e sem reposição:
e) Descreva o espaço amostral desse experimento;
f) Ambos tenham menos de 25 anos;
g) Exatamente 1 tenha mais de 40 anos;
h) A idade dos funcionários independe do sexo?
9. No curso de Engenharia Mecânica 5% dos homens e 2% das mulheres estão acima dos pesos
ideais. Um estudante é escolhido aleatoriamente. Sabendo-se que 60% dos estudantes são
homens calcule a probabilidade de que:
a) O estudante esteja acima do peso;
b) Seja mulher sabendo que o estudante está acima do peso.
10. Na disciplina de Cálculo das Probabilidades e Estatística I, apenas dois alunos, Paulo e João,
ficaram para fazer o exame final. A probabilidade de Paulo resolver a prova em mais de 1
hora é 0,6 e a probabilidade de que João resolva a prova em menos de 1 hora é de 0,7. Qual a
probabilidade da prova ser resolvida em menos de 1 hora?
11. A probabilidade de uma mulher estar viva daqui a 30 anos é de 3/4 e de seu marido é de 3/5.
Calcule a probabilidade de que:
a) Apenas o homem estar vivo;
b) Apenas a mulher estar viva;
c) Pelo menos um estar vivo;
d) Ambos estarem vivos.
12. Três empresa, 1,2 e 3, de informática disputam a obtenção de um contrato para a produção
de um software. O diretor do departamento de vendas da empresa 1 estima que sua companhia tem probabilidade igual à da empresa 2 de obter o contrato que por sua vez é igual
a duas vezes a probabilidade da empresa 3 obter o mesmo contrato. Determine a probabilidade da empresa 1 ou 3 obter o contrato.
13. Suponha que temos dois lotes nas seguintes condições: O primeiro lote(l 1 ) contendo 200
peças das quais 10 tem defeito(d) de fabricação, e o segundo lote(l 2 ) contendo 300 peças
das quais 12 tem defeito(d) de fabricação. Se uma peça for retirada de cada lote, qual é a
probabilidade de que:
a) Pelo menos uma das peças escolhidas seja perfeita;
b) Ambas tenham defeito de fabricação?
c) Nenhuma delas tenha defeito de fabricação?
d) Apenas a peça do primeiro lote tenha defeito de fabricação?
e) Somente uma delas tenha defeito de fabricação?
14. Numa cidade 20% dos carros são da marca K, 30% dos carros são táxis e 40% dos táxis são da
marca K. Se um carro é escolhido, ao acaso, determinar a probabilidade de que:
a) Ser táxi e ser da marca K;
b) Ser táxi e não ser da marca K;
c) Não ser táxi, sabendo-se que é da marca K;
d) Não ser táxi e não ser da marca K;
e) Não ser táxi e ser da marca K.
15. Em uma empresa a probabilidade de que uma nova política de mercado tenha sucesso(A)
foi estimada em 0,6. A probabilidade de que a despesa para o desenvolvimento da estratégia
seja mantida dentro dos limites do orçamento previsto(B) é de 0,5. Admitindo que ambos
os eventos A e B sejam independentes, determine a probabilidade de que:
a) Pelo menos um dos objetivos seja atingido;
b) Somente A seja atingido;
c) Somente B seja atingido.
16. Em uma universidade, 40% dos estudantes praticam vôlei e 30% praticam natação. Dentre
os que praticam vôlei, 20% praticam também natação. Que porcentagem de estudantes não
praticam nenhum dos dois esportes?
17. Sejam A e B dois eventos tais que P(A) = 0, 4 e P(A ∪ B ) = 0, 7. Seja P(B ) = p . Para que valor
de p , A e B serão mutuamente exclusivos? Para que valor de p A e B serão independentes?
18. Uma caixa contém 5 bolas brancas e três bolas pretas. Duas bolas são retiradas simultaneamente ao acaso e substituídas por três bolas azuis. Em seguida duas novas bolas são
retiradas da caixa.
a) Descreva o espaço amostral deste experimento;
b) Calcule a probabilidade de as duas últimas bolas retiradas sejam da mesma cor;
c) Se as duas últimas bolas retiradas forem uma branca e uma preta, calcular a probabilidade de que, na primeira extração, tenham saído duas bolas brancas.
19. Dois jogadores jogam alternadamente uma moeda, ganhando o jogo aquele que primeiro
obtiver uma cara.
a) Descreva o espaço amostral deste experimento;
b) Qual a probabilidade do primeiro jogador ganhar o jogo?
c) Qual a probabilidade do segundo jogador ganhar o jogo?
20. Em um lote de 12 lâmpadas, duas são defeituosas. Considere o experimento: três lâmpadas
são escolhidas aleatoriamente.
a) Descreva o espaço amostral deste experimento;
b) Qual a probabilidade de que nenhuma seja defeituosa;
c) Qual a probabilidade de que exatamente uma seja defeituosa;
d) Qual a probabilidade de que pelo menos uma seja defeituosa;
e) Qual a probabilidade de que exatamente duas sejam defeituosas.
21. Em uma festa beneficente serão sorteados um DVD(a) e uma máquina fotográfica digital(b).
São vendidos 400 bilhetes para o primeiro prêmio e 200 para o segundo. Uma mulher compra 4 bilhetes para concorrer a cada prêmio. Encontre a probabilidade de que:
a) Descreva o espaço amostral deste experimento;
b) Ela ganhe exatamente um prêmio;
c) Ela ganhe alguma coisa.
Capítulo 2
Variáveis aleatórias
Neste capítulo serão estudados o conceito de variável aleatória, sua classificação: discreta e
contínua; os tipos de distribuição de probabilidade: função de probabilidade, função de distribuição e densidade de probabilidade; e os conceitos de esperança, variância e função geradora de
momentos.
2.1
Conceitos e definições
Definição 2.1 (Variável aleatória). Seja (Ω, F , P) um espaço de probabilidade associado. Então uma
função X : Ω → R, que associa a cada elemento de ω ∈ Ω um número real é uma variável aleatória
se a imagem inversa de todo boreliano da reta B for um elemento de F , isto é,
n
o
X −1 (B ) = ω ∈ Ω : X (ω) ∈ B ∈ F
Os borelinos da reta é a classe de todos os tipos de intervalos da reta
n
o
(−∞, x ), (−∞, x ], (x , ∞), [x , ∞), (x , y ), [x , y ), (x , y ], [x , y ]
Observação 2.1. A função X deve ser unívoca, isto é, para cada ω ∈ Ω deve haver apenas um X (ω)
associado. Entretanto, diferentes valores de ω podem levar a um mesmo valor de X .
Observação 2.2. Uma função X satisfazendo as condições da Definição ?? é chamada de variável
aleatória F −mensurável.
Exemplo 2.1. Considere o seguinte experimento: selecionar uma peça em uma linha de produção e
observar se a peça é boa ou ruim. Nestas condições, segue que Ω = {b, r } em que b=boa e r=ruim.
Consideremos a seguinte variável aleatória,
(
0 se ω = b,
X (ω) =
1 se ω = r,
n
o
Assim, considerando a σ−álgebra das partes de Ω, isto é, F = ∅, Ω,b, r tem-se que para todo
boreliano B ⊂ R tal que:
25
• {0, 1} ∈
/ B , por exemplo B = (−5, 0), assim X −1 (B ) = ∅ ∈ F ;
• 0∈B e1∈
/ B , por exemplo B = 0, 21 , assim
X −1 (B ) = X −1 (0) = {b } ∈ F ;
• 0∈
/ B e 1 ∈ B , por exemplo B = [1, 2], assim
X −1 (B ) = X −1 (1) = {r } = {r } ∈ F ;
• {0, 1} ∈ B , por exemplo B = [0, 1], assim
X −1 (B ) = X −1 ({0, 1}) = {b, r } = Ω ∈ F ;
Portanto X como definido é uma variável aleatória.
Observação 2.3. Note que para todo boreliano B da reta tal que B ∩ Im(X ) = ∅ tem-se X −1 (B ) = ∅ ∈
F , em que Im(X ) é o conjunto imagem de X . Logo, é suficiente fazer a verificação apenas para o
conjunto imagem de X que denotaremos de ΩX .
Definição 2.2. Seja (Ω, F , P) um espaço de probabilidade
e X uma
variável aleatória. Então PX será
a medida de probabilidade induzida por X no espaço R, B R , tal que para todo A = X −1 (B ) ∈ F
tem-se que
PX (B ) = P X −1 (B ) = P(A).
Portanto R, B R , PX será o espaço de probabilidade induzido pela variável aleatória X .
Observação
2.4. Visto que PX (B ) = 0 para todo B ∩ ΩX = ∅, ao invés de utilizarmos o espaço
(R, B R , PX ) utilizaremos (ΩX , FX , PX ), em que FX é a σ-álgebra gerada por ΩX .
Observação 2.5. De um modo geral, sempre que estamos trabalhando com a medida de probabilidade induzida por uma variável aleatória X utilizamos a notação PX , entretanto para que a notação
não fique muito carregada e desde que não possa haver confusão não utilizaremos o subescrito.
Definição 2.3 (Função de Distribuição). Seja X uma variável aleatória, então sua função de distribuição é definida como,
−1
F (x ) = P(X ≤ x ) = P X (ω) ∈ (−∞, x ] = P X
− ∞, x
,
para todo x ∈ R. F é também conhecida como função de distribuição acumulada de X .
Propriedades: As condições necessárias e suficientes para que uma função seja uma função de
distribuição são:
(P1) limx →−∞ F (x ) = 0 e limx →∞ F (x ) = 1;
(P2) F é contínua à direita, isto é, para x n ↓ x tem-se que limx n →x F (x n ) = F (x + ) = F (x );
(P3) F é não decrescente, isto é, F (x ) ≤ F (y ) para todo x , y ∈ R tal que x ≤ y .
Exemplo 2.2. Seja X uma variável aleatória e F uma função dada por
0
se x < 1
1
F (x ) = c 1 − e −(x −1)
se 1 ≤ x < 2
1
−1
−2
−2(x
−1)
1−e +e −e
se x ≥ 2.
c
a) Verifique se F pode ser uma função de distribuição;
Solução: F é uma função de distribuição para c = 1 − e −1 + e −2 . De fato,
(a)
lim F (x ) = 0 pois F (x ) = 0 para x < 1
x →−∞
1
1
1 − e −1 + e −2 − e −2(x −1) =
1 − e −1 + e −2 = 1
x →∞
x →∞ c
c
−1
−2
Assim, para c = 1 − e + e tem-se limx →∞ F (x ) = 1;
lim F (x ) = lim
(b) F é continua à direita pois é contínua nos intervalos x < 1, 1 ≤ x < 2 e x ≥ 2 e nos pontos
x = {1, 2} tem-se que F (1) = F (1+ ) e F (2) = F (2+ ). Alem disso, note que F é continua pois
F (1) = F (1+ ) =
1
1 − e −(1−1) = 0 = F (1− )
c
e
F (2) = F (2+ ) =
1
1
1
1 − e −1 + e −2 − e −2(2−1) =
1 − e −1 = F (2− ) =
1 − e −(2−1)
c
c
c
(c) F é não decrescente, pois
1
e −(x −1)
d F (x )
= c2 e −2(x −1)
dx
0
c
se 1 ≤ x < 2
se x ≥ 2
≥ 0 para todo x ∈ R.
caso contrário
b) Calcule P X ≥ 1, 5X < 4 .
Solução:
P X ≥ 1, 5X < 4 = 1 − P X < 1, 5X < 4 = 1 − P X ≤ 1, 5X ≤ 4 pois F é contínua
P X ≤ 1, 5 , X ≤ 4
=1−
P X ≤4
P X ≤ 1, 5
F (1, 5)
=1−
=1− F (4)
P X ≤4
=1−
0, 39347
= 0, 4856.
0, 76498
2.2
Classificação das variáveis aleatórias
As variáveis aleatórias podem ser discretas ou contínuas. A classe das variáveis aleatórias contínuas ainda pode ser subdividida em três: absolutamente contínua, singular e mista. Neste curso
será abordada apenas a variável aleatória discreta e a absolutamente contínua.
Definição 2.4 (Variável aleatória discreta). Uma variável aleatória X é discreta se o número de valores que X possa assumir for enumerável.
Definição 2.5 (Função de Probabilidade). A função de probabilidade de uma variável aleatória X
discreta é uma função que atribui probabilidade a cada um dos possíveis valores x i de X , isto é,
PX (x i ) = P(X = x i ) = P({ω ∈ Ω : X (ω) = x i })
para todo i ∈ {1, 2, . . . , n}, n ∈ N e satisfaz as seguintes condições,
(i) para todo i ∈ {1, 2, . . . , n} tem-se que 0 ≤ P(X = x i ) ≤ 1;
Pn
(ii)
P(X = x i ) = 1.
i =1
Exemplo
2.3. Seja E =lançamento
moeda, seja X =número de caras ocorridos. Assim,
n
o
n de duas
o
Ω = (c , c ), (c , r ), (r, c ), (r, r ) ΩX = 0, 1, 2 e
1
PX (0) = P X −1 (0) = P(r, r ) = ,
4
2 1
PX (1) = P X −1 (1) = P (c , r ), (r, c ) = P(c , r ) + P(r, c ) = = ,
4 2
1
PX (2) = P X −1 (2) = P(c , c ) = .
4
Deste modo, a função de probabilidade de X é dada por
X
0
1
2
PX (x )
1
4
1
2
1
4
Definição 2.6. Para uma variável aleatória discreta a função de distribuição é dada por,
X
X
F (x ) =
PX (x i ) =
P(X = x i ).
x i ≤x
x i ≤x
para todo x ∈ R.
Exemplo 2.4. Do exemplo anterior tem-se que,
0
1
F (x ) = 43
4
1
se x < 0
se 0 ≤ x < 1
se 1 ≤ x < 2
se x ≥ 2
Observação 2.6. Da Definição ?? segue que
• P(a < X ≤ b ) = F (b ) − F (a );
h
i
• P(a ≤ X ≤ b ) = F (b ) − F (a ) − P(X = a ) = F (b ) − F (a − );
h
i
• P(a < X < b ) = F (b ) − P(X = b ) − F (a ) = F (b − ) − F (a );
h
i h
i
• P(a ≤ X < b ) = F (b ) − P(X = b ) − F (a ) − P(X = a ) = F (b − ) − F (a − );
De fato,
F (b ) − F (a ) =
X
P(X = x i ) −
X
P(X = x i )
x i ≤a
x i ≤b
=
X
P(X = x i ) +
X
P(X = x i ) −
a <x i ≤b
x i ≤a
=
X
X
P(X = x i )
x i ≤a
P(X = x i ) = P(a < X ≤ b ).
a <x i ≤b
Exemplo 2.5. Remessas de carne são feitas periodicamente por um grande frigorífico industrial. O
período de entrega, isto é, o tempo transcorrido entre o recebimento do pedido e a entrega da carne,
é uma variável aleatória X (medida em dias), com a seguinte função de probabilidade.
(
PX (x ) =
c (9 − x ) se x = {4, 5, 6, 7}
caso contrário .
0
Determinar:
1
;
(a) O valor da constante c; Resposta: c = 14
(b) A probabilidade de o período de entrega ser no mínimo 5 dias; Resposta: P(X ≥ 5) = 0, 6429.
Definição 2.7 (Variável aleatória contínua). Uma variável aleatória X é contínua se o número de
valores que X possa assumir for não enumerável.
Definição 2.8 (Variável aleatória absolutamente contínua). Uma variável aleatória X é absolutamente contínua se existir uma função não negativa f tal que para todo x ∈ R,
Z
x
F (x ) =
f (t )d t .
−∞
em que F é a função de distribuição da variável aleatória X .
Observação 2.7. Note que toda variável aleatória absolutamente contínua é uma variável aleatória contínua mas nem toda variável aleatória contínua é uma variável aleatória absolutamente
contínua.
A função f da Definição ?? é chamada de função densidade de probabilidade, e da Definição
??, segue que,
d F (x )
f (x ) =
dx
para todo x ∈ R aonde F for derivável.
Propriedades da função densidade: As condições necessárias e suficientes para que uma função seja uma função densidade são:
(i) f (x ) ≥ 0 para todo x ∈ R;
R∞
(ii) −∞ f (x )d x = 1.
A partir da definição de função de distribuição para uma variável aleatória contínua tem-se
que,
P X (ω) ∈ (a ,b ] = P(a < X ≤ b ) = P(a ≤ X ≤ b ) = P(a ≤ X < b ) = P(a < X < b )
Zb
f (x )d x = F (b ) − F (a ).
=
a
para todo a ,b ∈ R tal que a < b .
Exemplo 2.6. Seja X uma variável aleatória contínua. Seja f uma função como segue,
(
2x se 0 ≤ x ≤ 1
f (x ) =
0
caso contrário.
(a) Mostre que f é uma função densidade de probabilidade;
(b) Calcule P(X ≤ 0, 75)?
(c) Calcule P(X ≤ 0, 75|0, 5 ≤ X ≤ 1)?
Solução:
(a) f é uma fdp pois,
(i) f (x ) ≥ 0 para todo x ∈ R, pois
(1) Para x ∈ [0, 1] tem-se que 2x ≥ 0;
(2) Para x ∈
/ [0, 1] tem-se que f (x ) = 0.
(ii)
Z
−∞
Z
−∞
1
2x d x = x 2 0 = 1
f (x )d x =
∞
Portanto,
∞
0
F (x ) = x 2
1
se x < 0
se 0 ≤ x ≤ 1
se x > 1.
(b) Do ítem anterior tem-se que,
2
9
3
= .
P(X ≤ 0, 75) = F (0, 75) =
4
16
(c) temos que,
P ((X ≤ 0, 75) ∩ (0, 5 ≤ X ≤ 1)) P(0, 5 ≤ X ≤ 0, 75)
=
P(0, 5 ≤ X ≤ 1)
P(0, 5 ≤ X ≤ 1)
1
9
F (0, 75) − F (0, 5) 16 − 4
5
=
=
=
1
F (1) − F (0, 5)
12
1− 4
P(X ≤ 0, 75|0, 5 ≤ X ≤ 1) =
2.2.1
Independência de Variáveis Aleatórias
Vamos agora definir o conceito de independência entre variáveis aleatórias. Como será visto,
este conceito difere um pouco do conceito de independência entre eventos, pois agora cada variável aleatória gera uma σ-álgebra, deste modo para que um conjunto de variáveis aleatórias sejam
independentes, as σ-álgebras deverão ser independentes, isto é, se tivermos n variáveis aleatórias, então elas serão independentes se as n σ-álgebras fores independentes. Se isto ocorrer então
quaisquer subconjunto das n variáveis aleatórias serão independentes. É exatamente este fato que
difere do conceito de independência entre eventos, isto é, n eventos independentes não implica
que são 2 a 2 independentes.
Definição 2.9 (Independência entre variáveis aleatórias). Sejam X 1 , . . . , X n , n variáveis aleatórias
definidas no espaço de probabilidade (Ω, F , P). Então, X 1 , . . . , X n são independentes se para todo
boreliano da reta B i ∈ B R , i ∈ {1, . . . , n} tivermos,
P(X 1 ∈ B 1 , . . . , X n ∈ B n ) =
n
Y
P(X i ∈ B i );
i =1
Pela definição acima segue que,
1. Se X 1 , . . . , X n tem função de distribuição F1 , . . . , Fn respectivamente, então,
F (x 1 , . . . , x n ) =
n
Y
Fi (x i ).
i =1
2. Se X 1 , . . . , X n tem função densidade f 1 , . . . , f n respectivamente, então,
f (x 1 , . . . , x n ) =
n
Y
f i (x i ).
i =1
Exemplo 2.7. Considere o experimento de lançar um moeda honesta duas vezes. Assim,
n
o
Ω = (c , c ), (c , r ), (r, c ), (r, r ) .
Considere as seguintes variáveis aleatórias: X 1 =“número de caras nos dois lançamentos mais o número de coroas nos dois lançamentos”, X 2 =“número de caras nos dois lançamentos menos o número
de coroas nos dois lançamentos” assim,
Ω
(c,c)
(c,r)
(r,c)
(r,r)
X1
2
2
2
2
X2
2
0
0
-2
Deste modo, tem-se que,
X1
2
2
2
2.3
P(X 1 = x )
1
1
1
X2
2
0
-2
P(X 2 = y )
P(X 1 = x , X 2 = y )
1
4
1
2
1
4
1
4
1
2
1
4
Função de Variáveis Aleatórias
Seja (Ω, F , P) um espaço de probabilidade, X uma variável aleatória neste espaço e (ΩX , FX , PX ).
Seja h : ΩX → R uma função FX -mensurável, nestas condições Y = h(X ) também será uma variável
aleatória e sua função de probabilidade induzida PY será para todo boreliano da reta B ,
n
o
P(Y ∈ B ) = P X ∈ h −1 (B ) = P x ∈ ΩX : h(x ) ∈ B .
Definição 2.10. Chama-se supremo de um conjunto B à menor de suas cotas superiores. Assim, se
s for o supremo de B então:
• para todo b ∈ B tem-se que b ≤ s ;
• para todo ε > 0 existe um b ∈ B tal que s − ε < b
Definição 2.11. Chama-se ínfimo de um conjunto B à maior de suas cotas inferiores. Assim, se i for
o ínfimo de B então:
• para todo b ∈ B tem-se que b ≥ i ;
• para todo ε > 0 existe um b ∈ B tal que i + ε > b
Se h for uma função monótona não decrescente então a função de distribuição de Y é dada
por,
FY (y ) = P(Y ≤ y ) = P X ≤ h −1 (y ) = FX h −1 (y )
em que h −1 (y ) = inf x ∈ ΩX : h(x ) ≥ y é a inversa generalizada para este caso. Se h for uma função
monótona não crescente então a função de distribuição de Y é dada por,
FY (y ) = P(Y ≤ y ) = P X ≥ h −1 (y ) 1 − FX h −1 (y )−
em que h −1 (y ) = inf x ∈ ΩX : h(x ) ≤ y é a inversa generalizada para este caso.
Se X for uma variável aleatória absolutamente contínua e h for uma função derivável e bijetora,
então a densidade de Y é dada por,
d FX h −1 (y ) d h −1 (y )
d FY (y ) d FX h −1 (y )
=
=
= f X h −1 (y ) J (x , y ).
f Y (y ) =
−1
dy
dy
d h (y )
dy
em que
J (x , y ) =
d h −1 (y )
dy
=
−1 d h(x )
dx
x =h −1 (y )
é chamado de jacobiano da transformação. Se h não for bijetora, então pode-se obter uma partição do domínio da função de modo que em cada partição a função seja bijetora, nestas condições
segue para B 1 , . . . , B k uma partição, h i a restrição da função h na partição B i e J i é o Jacobiano da
transformação na partição B i que,
f Y (y ) =
k
X
(y
)
J i (x , y ).
f X h −1
i
i =1
Exemplo 2.8. O tempo T em minutos necessário para um operário processar certa peça, é uma
variável aleatória com a seguinte distribuição de probabilidade:
T(min)
P(t )
2
0,1
3
0,1
4
0,3
5
0,2
6
0,2
7
0,1
t∈
/ {2, 3, 4, 5, 6, 7}
0
(a) Para cada peça processada o operário ganha um fixo de R$2, 00, mais R$0, 50 por cada minuto
inferior a 6 minutos. Determine a variavél aleatória X ganho do operário e a sua função de
distribuição;
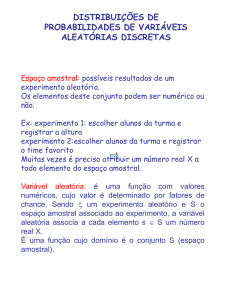
Solução: Seja X = h(T ) a variável aleatória ganho do operário. Do problema tem-se que:
(
2
se t = {6, 7}
h(t ) =
2 + 0, 5 × (6 − t ) se t = {2, 3, 4, 5}
●
3.0
●
●
2.5
X
3.5
4.0
Gráficamente, temos que,
2.0
●
2
3
4
5
●
●
6
7
T
Figura 2.1: Ganho do operário
Note que h é monótona não crescente, assim
h −1 (4, 0) = inf {t ∈ ΩT : h(t ) ≤ 4, 0} = inf {2, 3, 4, 5, 6, 7} = {2}
Portanto,
• Para x < 2, 0 tem-se que F (x ) = 0;
• Para 2 ≤ x < 2, 5 tem-se que,
h −1 (x ) = inf {t ∈ ΩT : h(t ) ≤ x } = inf {6, 7} = {6}
assim,
F (x ) = P T ≥ h −1 (x ) = P(T ≥ 6) = 0, 2 + 0, 1 = 0, 3;
• Para 2, 5 ≤ x < 3, 0 tem-se que,
h −1 (x ) = inf {t ∈ ΩT : h(t ) ≤ x } = inf {5, 6, 7} = {5}
assim,
F (x ) = P T ≥ h −1 (x ) = P(T ≥ 5) = 0, 2 + 0, 1 + 0, 2 = 0, 5;
• Para 3, 0 ≤ x < 3, 5 tem-se que,
h −1 (x ) = inf {t ∈ ΩT : h(t ) ≤ x } = inf {4, 5, 6, 7} = {4}
assim,
F (x ) = P T ≥ h −1 (x ) = P(T ≥ 4) = 0, 2 + 0, 1 + 0, 2 + 0, 3 = 0, 8;
• Para 3, 5 ≤ x < 4, 0 tem-se que,
h −1 (x ) = inf {t ∈ ΩT : h(t ) ≤ x } = inf {3, 4, 5, 6, 7} = {3}
assim,
F (x ) = P T ≥ h −1 (x ) = P(T ≥ 3) = 0, 2 + 0, 1 + 0, 2 + 0, 3 + 0, 1 = 0, 9;
• Para x ≥ 4, 0 tem-se que,
h −1 (x ) = inf {t ∈ ΩT : h(t ) ≤ x } = inf {2, 3, 4, 5, 6, 7} = {2}
assim,
F (x ) = P T ≥ h −1 (x ) = P(T ≥ 3) = 0, 2 + 0, 1 + 0, 2 + 0, 3 + 0, 1 + 0, 1 = 1;
F (x ) =
0
0, 3
0, 5
se x < 2
0, 8
0, 9
1
se 3, 0 ≤ x < 3, 5
se 2, 0 ≤ x < 2, 5
se 2, 5 ≤ x < 3, 0
se 3, 5 ≤ x < 4, 0
se x ≥ 4, 0
2.4
Esperança de uma variável aleatória
A esperança de uma variável aleatória nada mais é que o valor médio esperado da variável. Por
este motivo a esperança é usualmente denominado de valor esperado.
Definição 2.12 (Valor Esperado). Seja Ω, F , P um espaço de probabilidade, X variável aleatória
neste espaço e ΩX , FX , PX o espaço de probabilidade induzido por X . Então o valor esperado de X ,
denotado por E (X ), é para o caso em que X é discreta,
E (X ) =
X
x P(x )
x ∈ΩX
e para o caso em que X é contínua
∞
Z
E (X ) =
x f (x )d x
−∞
em ambos os casos uma condição suficiente para a existência do valor esperado é E |X | < ∞.
O incômodo desta definição é que temos que provar cada teorema duas vezes para caso discreto e para o caso absolutamente contínuo, isto sem levar em conta os outros tipos de variáveis
aleatórias. Uma maneira de unificar estas definições e torna-la um pouco mais geral é utilizar o
conceito da integral de Riemann-Stieltjes.
Definição 2.13 (Riemann-Stieltjes). Sejam h e F duas funções reais definidasnno intervaloo[a ,b ],
com F uma função monótona não decrescente contínua à direita. Seja B = x 0 , x 1 , . . . , x n uma
partição de [a ,b ] em que a = x 0 < x 1 < . . . < x n −1 < x n = b . Então a integral de Riemann-Stieltjes é
definida como,
Zb
X
h(x )d F (x ) =
lim
h(x k i )[F (x i ) − F (x i −1 )]
max |x j −x j −1 |→0
a
x i ∈B
se o limite existir, em que x i ≤ x k i ≤ x i −1 . Neste caso, diz-se que h é Riemann-Stieltjes integrável com
relação a F .
Se F for uma função degrau contínua à direita então
Z
b
h(x )d F (x ) =
X
h(x )[F (x ) − F (x − )],
{x ∈(a ,b ]:F (x )−F (x − )>0}
a
se F for uma função de distribuição então observe que F (x ) − F (x − ) = P(X = x ). Se F = f (x ) em
[a ,b ] então,
Zb
Zb
0
h(x )d F (x ) =
a
h(x )f (x )x d x .
a
Note que para F (x ) = x então tem-se a integral de Riemann. O caso em que o intervalo é infinito é
tratado tomando-se o limite nos extremos de integração.
Definição 2.14. Seja X uma variável aleatória com função distribuição F . O valor esperado de X é
dado por,
Z
∞
E (X ) =
x d F (x )
−∞
se E |X | < ∞.
Exemplo 2.9. Seja X uma variável aleatória com função de distribuição,
0
se x < 0
0, 5
se 0 ≤ x < 1
F (x ) =
0, 75 se 1 ≤ x < 2
1
se x ≥ 2.
então,
X
E (x ) =
x [F (x ) − F (x − )]
{x ∈R:F (x )−F (x − )>0}
X
=
x [F (x ) − F (x − )]
{x ∈{0,1,2}}
= 0 × [F (0) − F (0− )] + 1 × [F (1) − F (1− )] + 2 × [F (2) − F (2− )]
3
= 0 × 0, 5 + 1 × 0, 25 + 2 × 0, 25 = 0, 75 =
4
Considere agora que X tem função de distribuição dada por
0 se x < 0
F (x ) = x 2 se 0 ≤ x ≤ 1
1 sex ≥ 1
então,
(
0
F (x ) = f (x ) =
assim,
Z
∞
E (X ) =
se 0 ≤ x ≤ 1
0
caso contrário.
0
1
Z
x d F (x ) =
−∞
2.4.1
Z
2x
x × 0d x +
−∞
∞
Z
x × 2x d x +
0
1
2
x × 0d x = .
3
Propriedades da Esperança
1. Seja c ∈ R uma constante, então E (c ) = c ;
2. Seja h uma função uma função FX -mensurável, então para Y = h(X ) tem-se que
Z
∞
E (Y ) =
Z
∞
y d FY (y ) =
−∞
h(x )d FX (x ).
−∞
Assim, se X for uma variável aleatória discreta então,
X
E (Y ) =
h(x )P(x )
x ∈ΩX
e, se X for uma variável aleatória for absolutamnte contínua então,
Z∞
E (Y ) =
h(x )f (x )d x .
−∞
3. Sejam X 1 , . . . , X n n variáveis aleatória então
E
n
X
!
=
Xi
i =1
2.5
n
X
E (X i ).
i =1
Variância de uma variável aleatória
Definição 2.15. Seja X uma variável aleatória definida no espaço de probabilidade (Ω, F , P). Então
a variância da variável aleatória X , denotado por V a r (X ) ou σ2 é,
Z∞
2
V a r (X ) = E (X − E (X ))2 =
(x − µX )2 d F (x ) = E (X 2 ) − E (X ) .
−∞
Assim, se X é uma variável aleatória discreta, então
2
V a r (X ) =
X
(x − µX ) P(X = x ) =
2
x ∈ΩX
X
X
x P(X = x ) −
2
x ∈ΩX
x P(X = x )
x ∈ΩX
em que µX = E (X ). Se X é uma variável aleatória contínua, então
Z
∞
V a r (X ) =
Z
∞
(x − µX ) f (x )d x =
−∞
Z
x f (x )d x
2
−∞
2
∞
x f (x )d x −
2
.
−∞
Exemplo 2.10. Seja X uma variável aleatória com função de distribuição,
0
se x < 0
0, 5
se 0 ≤ x < 1
F (x ) =
0, 75 se 1 ≤ x < 2
1
se x ≥ 2.
então,
E (x ) =
2
X
x 2 [F (x ) − F (x − )] = 02 × [F (0) − F (0− )] + 12 × [F (1) − F (1− )] + 22 × [F (2) − F (2− )]
{x ∈{0,1,2}}
5
= 0 × 0, 5 + 1 × 0, 25 + 4 × 0, 25 = 1, 25 = .
4
logo,
2
5
3
11
V a r (X ) = −
= .
4
4
16
Considere agora que X tem função de distribuição dada por
0 se x < 0
F (x ) = x 2 se 0 ≤ x ≤ 1
1 sex ≥ 1
então,
(
0
F (x ) = f (x ) =
2x
se 0 ≤ x ≤ 1
0
caso contrário.
assim,
Z
∞
Z
E (X ) =
x × 0d x +
∞
Z
x × 2x d x +
2
−∞
assim,
1
Z
2
−∞
2.5.1
0
x d F (x ) =
2
2
0
1
1
x 4 = .
x × 0d x =
2 0 2
2
1
2
2
1
1
= .
V a r (X ) = −
2
3
18
Propriedades da Variância
1. V a r (c ) = 0, pois E ((c − E (c ))2 ) = 0;
2. V a r (X ± c ) = V a r (X ), pois
V a r (X + c ) = E (X + c − E (X + c ))2 = E (X + c − E (X ) − c )2
= E (X − E (X ))2 = V a r (X ).
3. V a r (c X ) = c 2 V a r (X ), pois
2
2
V a r (c X ) = E (c X )2 − E (c X ) = E c 2 X 2 − c E (X )
h
2
2 i
2
2
2
2
2
= c 2 V a r (X ).
= c E X − c E (X ) = c E X − E (X )
4. Sejam X 1 , . . . , X n n variáveis aleatória então,
!
n
n
n −1 X
n
X
X
X
Var
=
V a r (X i ) + 2
Cov (X j X i ).
i =1
i =1
j =1 i =j +1
em que,
Cov (X j , X i ) = E (X j − E (X j ))(X i − E (X i ))
Z ∞Z ∞
=
(x − µX j )(y − µX i )d F (x , y ) = E (X i X j ) − E (X i )E (X j ),
−∞
−∞
é a covariância entre as variáveis X i e X j , também denotada por σX ,Y , e F (x , y ) é a função
de distribuição conjunta de X i e X j . A covariância é uma medida de dependencia linear.
Entretanto, para que se possa fazer comparações é mais adequado padronizar esta medida,
assim
Cov (X j , X i )
ρX ,Y = p
V a r (X i )V a r (X j )
A medida resultante desta padronização é denominada coeficiente de correlação linear e
denotada por ρX ,Y ou ρ(X , Y ). Deste modo, pode-se provar que −1 ≤ ρX ,Y ≤ 1. Se X 1 , . . . , X n
forem independentes então, ρX ,Y = 0 logo Cov (X j , X i ) = 0, assim,
!
n
n
X
X
Var
=
V a r (X i ).
i =1
i =1
De fato, note que
n
X
(z 1 + . . . + z n )2 =
i =1
=
n
X
!
n
n
n
X
XX
zjzi
zj=
zi
j =1 i =1
j =1
z i2 + (z 1 z 2 + z 1 z 3 + · · · + z 1 z n ) + (z 2 z 1 + z 2 z 3 + · · · + z 2 z n )
i =1
+ (z 3 z 1 + z 3 z 2 + · · · + z 3 z n ) + · · · + (z n z 1 + z n z 2 + z n z 3 + · · · + z n z n −1 )
=
n
X
z i2 + 2
n−1 X
n
X
zjzi.
j =1 i =j +1
i =1
assim,
Var
n
X
!
Xi
=E
n
X
i =1
Xi
2
!
− E
i =1
n
X
i =1
!2
Xi
n −1 X
n
n
n
X
X
X
2
2
X j Xi −
E (X i )
=E
Xi + 2
j =1 i =j +1
i =1
=E
n
X
!
X i2
i =1
=
n
X
E (X i2 ) −
i =1
=
n −1 X
n
n
n −1 X
n
X
X
X
+ E 2
X j X i − [E (X i )]2 + 2
E (X j )E (X i )
j =1 i =j +1
n
X
[E (X i )]2 + 2
i =1
n
X
=
i =1
n−1 X
n
X
i =1
E (X j X i ) − 2
j =1 i =j +1
j =1 i =j +1
n−1 X
n
X
E (X j )E (X i )
j =1 i =j +1
n −1 X
n
X
E (X i2 ) − [E (X i )]2 + 2
E (X j X i ) − E (X j )E (X i )
i =1
n
X
i =1
j =1 i =j +1
V a r (X i ) + 2
n −1 X
n
X
j =1 i =j +1
Cov (X i , X j ).
Se X 1 , . . . , X n forem independentes então, FX i ,X j (x i , x j ) = FX i (x i )FX j (x j ) para todo i 6= j , assim
Z
∞
Z
∞
Z
∞
∞
Z
x i x j d FX i (x i )d FX j (x j )
x i x j d FX i ,X j (x i , x j ) =
E (X j X i ) =
−∞ −∞
Z
∞
Z
∞
−∞
x j d FX j (x j ) = E (X j )E (X i ).
x i d FX i (x i )
=
−∞
−∞
−∞
Logo,
Cov (X i , X j ) = E (X i X j ) − E (X i )E (X j ) = 0.
Observação 2.8. Note que se X e Y são variáveis aleatórias independentes então ρX ,Y = Cov (X , Y ) =
0, entretanto, ρX ,Y = Cov (X , Y ) = 0 não implica que X e Y são variáveis aleatórias independentes.
Um resultado interessante que relaciona a probabilidade de um evento com sua sua variância é
dada pela desigualdade de Chebyschev.
Teorema 2.1 (Desigualdade de Chebyschev). Seja X uma variável aleatória tal que a variância
exista. Então para qualquer constante c > 0, tem-se que
V a r (X )
.
P |X − µX | ≥ c ≤
c2
Demonstração. De fato,
Z
∞
V a r (X ) =
(x − µX )2 d F (x )
Z−∞
Z
=
(x − µX ) d F (x ) +
(x − µX )2 d F (x )
2
{x ∈R:|X −µX |<c }
{x ∈R:|X −µX |≥c }
Z
(x − µX )2 d F (x )
≥
{x ∈R:|X −µX |≥c }
Agora note que, como c > 0 tem-se que |X − µX | ≥ c implica que (X − µX )2 ≥ c 2 , assim
Z
V a r (X ) ≥
(x − µX )2 d F (x )
{x ∈R:|X −µX |≥c }
Z
c 2 d F (x )
≥
{x ∈R:|X −µX |≥c }
Z
= c2
d F (x ) = c 2 P |X − µX | ≥ c
{x ∈R:|X −µX |≥c }
2.6
Função Geradora de Momentos
Até o momento exploramos duas características importantes sobre variáveis aleatórias que foram o valor esperado e a variância. Nesta seção, vamos apresentar o conceito de momentos e
de função geradora de momentos(FGM). A função geradora de momentos é assim chamada pois
através da FGM pode-se determinar os momentos de uma variável aleatória. Outra característica
importante da FGM é que se ela existir então pode ser utilizada para caracterizar uma variável aleatória. Isto é, se duas variáveis aleatórias possuirem a mesma FGM então elas possuem a mesma
função de distribuição.
Definição 2.16. Seja X uma variável aleatória com função de distribuição F . Então o momento de
ordem k é definido como,
Z∞
µk = E (X k ) =
x k d F (x )
−∞
k
se E |X | < ∞ e o momento central de ordem k é definido como,
Z
∞
(x − µX )k d F (x ).
E ((X − µX ) ) =
k
−∞
Note da definição acima que, o valor esperado é o momento de ordem 1 e a variância é o momento central de ordem k que pode ser expresso, como já visto, como a diferença entre o momento
de ordem 2 e o quadrado do momento de ordem 1.
Definição 2.17. Seja X uma variável aleatória com função de distribuição F . Então sua função
geradora de momentos é definida como,
M X (t ) = E e
tX
Z
∞
=
e t x d F (x )
−∞
desde que a esperança seja finita para |t | < t o real, com t 0 > 0, isto é, a esperança deve ser finita para
valores de t numa vizinhança de zero.
Exemplo 2.11. Seja X uma variável aleatória com função de distribuição,
F (x ) =
0
0, 5
se x < 0
se 0 ≤ x < 1
0, 75 se 1 ≤ x < 2
1
se x ≥ 2.
então a FGM de X é dada por,
X
M X (t ) = E e t X =
e t x P(X = x )
x ∈{0,1,2}
= 1 × 0, 5 + e t × 0, 25 + e 2t × 0, 25 = 0, 5 + 0, 25 e t + e 2t .
Considere agora que X tem função de distribuição dada por
0 se x < 0
F (x ) = x 2 se 0 ≤ x < 1
1 sex ≥ 1
então,
(
0
F (x ) = f (x ) =
assim, utilizando a integral por partes
Z
∞
M X (t ) =
R
se 0 ≤ x < 1
0
caso contrário.
f (x )g (x )d x = f (x )g (x ) −
0
0
Z
e d F (x ) =
tx
−∞
2x
e
× 0d x +
−∞
0
f (x )g (x )d x , tem-se que
1
Z
tx
R
∞
Z
e
tx
× 2x d x +
0
e t x × 0d x
1
Z1
1
1
2 t
2 t x 2
2
2 t x 2
2
tx
e dx = e − 2e = et − 2et + .
= xe −
t
t 0
t
t
t
t
t
0
0
Note que neste caso quando t → 0, M X (t ) não é finita, logo não existe FGM.
2.6.1
Propriedades da Função Geradora - FGM
Suponha que a FGM de X exista para |t | < t o , t o > 0, então:
1. Para n ∈ N tem-se que
∂ n M X (t ) E (X ) =
.
∂ t n t =0
n
Demonstração. De fato, primeiro note que,
etx =
∞
X
(t x )k
k =0
k!
=1+tx +
(t x )2
+ ···
2!
aplicando a esperança, em ambos os lados tem-se que,
!
∞
∞
X
X
(t x )k
(t )k
M X (t ) = E
=
E (X k )
k
!
k
!
k =0
k =0
Assim,
E (X k ) =
∂tn
t =0
k t =0
∞
X
∂ n (tk)! k
=
E (X )
n
∂
t
k =0
∂
X (t ) ∂tn nM
∂n
P
∞
(t )k
k =0 k !
t =0
Assim, para n = k tem-se que
∂ n M X (t ) = E (X n ).
n
∂t
t =0
2. Para X 1 , . . . , X n variáveis aleatórias independentes com FGM’s M X 1 , . . . , M X n respectivamente
e Y = X 1 + · · · , X n , então a função geradora de Y existe e é dada por,
M Y (t ) =
n
Y
M X i (t ).
i =1
Demonstração. De fato,
M Y (t ) = E e t Y = E e t (X 1 +··· ,X n )
= E e t X1 × · · · × e t Xn
Z∞ Z∞
=
e t x 1 × · · · × e t x n d F (x 1 , . . . , x n )
···
Z−∞
∞
Z−∞
∞
=
e t x 1 × · · · × e t x n d FX 1 (x 1 ) · · · d FX n (x n )
···
Z−∞
∞
=
−∞
Z
e
t x 11
d FX 1 (x 1 )· · ·
−∞
=E e
∞
e t x n d FX n (x n )
−∞
t X1
× ··· × E e
t Xn
=
n
Y
M X i (t ).
i =1
3. Para X uma variável aleatória com função geradora de momentos M X . Seja Y = a X + b em
que a e b são constantes. Então, a FGM de Y é dada por M Y (t ) = e b M X (a t ).
Demonstração. De fato,
M Y (t ) = E e t Y = E e t (a X +b ) = E e a t X e b t = e b t E e a t X .
4. Para t = 0 tem-se que M X (0) = 1.
Demonstração. De fato, se a FGM existe então,
M X (0) = E e t ×0 = E (1) = 1.
5. Se FX , FY e M X (t ), M Y (t ) são respectivamente, as funções de distribuição e as FGM’s de X
e Y então FX (a ) = FY (a ) para todo a ∈ R se, e somente se, M X (t ) = M Y (t ) para todo t em
|t | < t 0 , t 0 > 0. Em outra palavras, Se X e Y tem a mesma função de distribuição então elas
possuem a mesma FGM, do mesmo modo se X e Y tem a mesma FGM então elas possuem
a mesma função de distribuição.
Demonstração. A demosntração deste fato não será feita pois precisaríamos de alguns resultados da análise que estão fora do escopo deste curso.
Observação 2.9. A propriedade (4) afirma que se a função geradora de momentos existir então seu
valor em t = 0 deve ser necessáriamente 1.
Observação 2.10. A propriedade (5) nos informa que se a função geradora de momentos existir
então ela pode ser utilizada para caracterizar uma distribuição de probabilidade.
Exemplo 2.12. Do exemplo anterior tem-se para M X (t ) = 0, 5 + 0, 25 (e t + e 2t ),
3
= 0, 25(1 + 2) = 0, 75 = ;
4
t =0
t
2t M X (t ) t = 0 = 0, 25 e + 2e 0
e
5
= 0, 25(1 + 4) = 1, 25 = .
4
t =0
t
2t M X (t ) t = 0 = 0, 25 e + 4e 00
Logo,
2
5
3
11
V a r (X ) = −
= .
4
4
16
Note ainda que para t = 0 tem-se M X (0) = 1.
Um resultado semelhante à desigualdade de Chebyschev, mas que neste caso relaciona o probabilidade de um evento com seu momento de ordem k é a desigualdade de Markov.
Teorema 2.2 (Desigualdade de Markov). Seja X uma variável aleatória tal que E (|X |k ) < ∞ para
K > 0. Então para quaisquer k , c > 0, tem-se que
E (|X |k )
P |X | ≥ c ≤
.
ck
Demonstração. A prova é semelhante à feita no teorema da Desigualdade de Chebyschev.
Capítulo 3
Modelos Probabilísticos para variáveis
aleatórias discretas
Neste capítulo vamos apresentar alguns dos modelos mais usuais para variáveis aleatórias discretas: Uniforme discreta, Bernoulli, Binomial, Geométrica, Binomial Negativa, Hipergeométrica
e Poisson. Existem ainda muitos outros modelos, entretanto, estes são os mais conhecidos.
3.1
Alguns Resultados Úteis
A seguir é apresentado alguns resultados que serão úteis em algumas demonstrações. Seja
0 < a ,b < 1, então:
Pn−1 n−1
Pn n 1. (a + b )n = x =0 x a x b n−x e (a + b )n −1 = x =0 x a x b n −1−x ;
P∞ n
2. e x = n=0 xn !
ak
, k ≥ 0;
1−a
P∞
a
xax =
;
4.
x =1
(1 − a )2
3.
P∞
5.
P∞
ax =
x =k
x (x − 1)a x =
x =2
6. x
7.
n
n −1
= n x −1 ;
x
n
n −1
= nr r −1 ;
r
8.
Pr
9.
P∞
m n −m x
r −x
n
r
x =0
=1
[(1 − a )e t ]x =
x =0
gente;
10.
2a 2
;
(1 − a )3
1
(1−b )r
=
P∞
x =0
e
Pr −1
x =0
m −1 n −1−m −1
x
r −1−x
n −1
r −1
= 1;
1
1
, pois (1 − a )e t < 1 para a série ser converpara
t
<
ln
1−a
1 − (1 − a )e t
x +r −1 x
b .
r −1
45
3.2
Distribuição Uniforme Discreta
Seja (Ω, F , P) um espaço de probabilidade e {A i , i = 1, . . . , n} uma partição de Ω tal que P(A i ) =
p para todo i ∈ {1, . . . , n}. Então uma variável aleatória X neste espaço tal que
X (ω) =
n
X
x i I A i (ω)
i =1
tem função de probabilidade dada por,
P(X = x ) = p I {x 1 ,...,x n } (x )
em que,
p=
1
n
pois,
i =1
X
P(X = x i ) = n p = 1, logo p =
n
1
.
n
Esta distribuição de probabilidade é denominada de distribuição uniforme discreta e denotado
por X ∼ Ud [E ], em que E é conjuntos de valores que X pode assumir.
Note que neste caso o espaço de probabilidade induzido por X é um espaço de eventos equiprováveis.
Exemplo 3.1. O lançamento de uma moeda honesta é um caso em que X ∼ Ud [0, 1], neste caso
1
P(X = x ) = I {0,1} (x )
2
Já para o lançamento de um dado honesto tem-se X ∼ Ud [1, . . . , 6], tem-se
1
P(X = x ) = I {1,...,6} (x )
6
3.2.1
Esperança, variância e função geradora de momentos
Para X ∼ Ud [E ] tem-se que,
E (X ) =
n
X
x i P(X = x i ) =
i =1
n
X
xi
i =1
n
X
n
1
1X
=
xi .
n n i =1
n
1X
V a r (X ) =
(x i − µX ) P(X = x i ) =
(x i − µX )2 .
n
i =1
i =1
2
e a função geradora de momentos é dada por,
M X (t ) =
n
X
e t x i P(X = x i ) =
i =1
n
1 X t xi
=
e .
n i =1
n
X
i =1
e t xi
1
n
3.3
Distribuição de Bernoulli
Seja (Ω, F , P) um espaço de probabilidade e X uma variável aleatória neste espaço tal que para
um dado evento de interesse A ∈ F tem-se,
X (ω) = I A (ω)
Nestas condições segue que a função distribuição de X é dado por,
PX (x ) = p x × (1 − p )1−x I {0,1} (x )
Uma função de probabilidade assim definida é chamada de distribuição de Bernoulli. Agora observe que p = P(A). De fato, para x = 1 tem-se,
−1
PX (1) = p = P X (1) = P(A).
Os experimentos que originam uma variável aleatória com distribuição de Bernoulli são chamados de experimentos de Bernoulli.
Notação: Se uma variável aleatória X possui distribuição(ou lei) de probabilidade então é usual
a seguinte notação, X ∼ b e r (p ).
Note o espaço amostral Ω pode ser enumerável ou não enumerável. Deste modo, o evento de
interesse A pode conter:
• um único elemento, por exemplo, Ω = {c a r a , coroa }, A = {coroa } e A c = {c a r a };
• vários elementos, por exemplo, Ω = {1, 2, 3, 4, 5, 6} A = {2, 4, 6} e A c = {1, 3, 5};
• um número não enumerável de elementos, por exemplo, Ω = {x ∈ R : 0 < x ≤ 3}, A = {x ∈ R :
x > 1, 65} e A c = {x ∈ R : x ≤ 1, 65};
3.3.1
Esperança, variância e função geradora de momentos
Para X ∼ b e r (p ) tem-se que,
E (X ) =
1
X
x P(x ) = 0 × (1 − p ) + 1 × p = p.
x =0
V a r (X ) = E (X ) − [E (X )] =
2
2
1
X
x 2 P(x ) − p 2 = 02 × (1 − p ) + 12 × p − p 2 = p (1 − p ).
x =0
e
M X (t ) =
1
X
x =0
e P(X = x ) =
tx
1
X
e t x p x × (1 − p )1−x = 1 − p + p e t .
x =0
Exemplo 3.2. Considere E =lançamento de um dado. Considere que o evento de interesse seja a
ocorrência de um número par, portanto A = {2, 4, 6} assim
(
1 se ω ∈ {2, 4, 6}
X (ω) =
0 se ω ∈ {1, 3, 5}
e p = P(A) = 36 = 0, 5. Portanto, a função de probabilidade de X é dada por,
(
0, 5x × 0, 51−x se x={0,1}
P(x ) =
0
caso contrário
3.4
Distribuição Binomial
Considere agora que um experimento de Bernoulli é repetido n vezes de maneira independente, isto é, o espaço de probabilidade (Ω, F , P) associado ao experimento na i-ésima repetição é
o mesmo em todas as n repetições do experimento. Seja (Ωn , Fn , Pn ) o espaço de probabilidade ao
experimento composto das n repetições, assim Ωn = |
Ω × {z
··· × Ω
} e X uma variável aleatória neste
n vezes
espaço tal que para um dado evento de interesse A ∈ F a variável aleatória X conta o número de
vezes que o evento A ocorre em n repetições independentes de um experimento de Bernoulli.
PnNestas condições, seja Yi = I A (ω) ∼ b e r (p ) na i-ésima repetição do experimento, então X = i =1 Yi .
Nestas condições, segue que a função de probabilidade de X é dado por,
n
P(X = x ) =
p x × (1 − p )n −x I {0,1,2,...,n} (x )
x
Em que p = P(A). De fato, considere x = n, assim,
n
PX (n) =
p n × (1 − p )n−n = p n = Pn X −1 (n)
n
n
Y
= Pn ×ni=1 A =
P(A) pela independência dos eventos
i =1
= P(A)n
Portanto, p = P(A). Notação: X ∼ b i n (n, p ).
n
Note que x representa o número de permutações com repetição dos n elementos em que A
aparece x vezes e A c n − x vezes. Note que neste caso, como só temos 2 elementos distintos, a
permutação com repetição é igual a combinação simples. Uma forma de ver isso é pensar não
nos elementos da permutação mas sim nas posições que eles iram assumir. Deste modo, temos
o seguinte problema: temos n posições 1, . . . , n que representam n elementos distintos e devemos
escolher x posições, neste caso o número de conjuntos distintos que podemos formar é a combinação simples de n elementos tomados x a x . Por exemplo, seja n = 3 e x = 2 então os arranjos
possíveis são:
n
o
(A, A, A c ), (A, A c , A), (A c , A, A)
portanto 3 arranjos possíveis. Então a probabilidade do evento A ocorrer duas vezes em três repetições independentes do experimento é,
P (A, A, A c ), (A, A c , A), (A c , A, A) = P(A, A, A c ) + P(A, A c , A) + P(A c , A, A)
= P(A ∩ A ∩ A c ) + P(A ∩ A c ∩ A) + P(A c ∩ A ∩ A)
= P(A)P(A)P(A c ) + P(A)P(A c )P(A) + P(A c )P(A)P(A)
3
2
= 3 × p (1 − p ) =
× P(A)P(A)P(A c ).
2
Exemplo 3.3. Considere E =lançamento de uma moeda 10 vezes. Considere que o evento de interesse
seja a ocorrência da face cara. Deste modo, qual a probabilidade de ocorrer 4 caras? Tem-se que
p = P(A) = P(c ) = 0, 5. Da definição segue que,
10
10!
0, 54 × 0, 56 = 0, 2051.
PX (4) =
0, 54 × (1 − 0, 5)10−4 =
4!6!
4
3.4.1
Esperança, variância e função geradora de momentos
Para X ∼ b i n (n, p ) tem-se que,
n
X
n
n
X
X
n
n n −1 x
x
n −x
p × (1 − p )n −x
E (X ) =
x P(X = x ) =
x
p × (1 − p )
=
x
x
x
−
1
x
x =0
x =1
x =1
n
n X
X
n −1
n − 1 x −1
x −1
n −x
=
n
p ×p
× (1 − p )
= np
p
× (1 − p )n −x −1+1
x −1
x −1
x =1
x =1
n
X n −1
= np
p x −1 × (1 − p )(n −1)−(x −1) .
x
−
1
x =1
Fazendo y = x −1 tem-se que x = 1 implica y = 0 e x = n então y = n −1. Assim, como (a +b )n−1 =
P
n −1 i n −1−i
a b
, tem-se que
i =0
E (X ) = n p
n −1 X
n −1
y =0
|
y
p y × (1 − p )n −1−y = n p.
{z
(p +1−p )n−1 =1
}
e
n
X
n
n
x
n −x
E (X ) =
x
p × (1 − p )
=
x (x − 1 + 1)
p x × (1 − p )n −x
x
x
x =1
x =1
n
n
X
X
n
n
x
n −x
=
x (x − 1)
p × (1 − p )
+
x
p x × (1 − p )n−x
x
x
x =1
x =1
n
X
n(n − 1) n − 2 x
p × (1 − p )n −x + E (X )
=
x (x − 1)
x (x − 1) x − 2
x =1
n
X n − 2
= n(n − 1)
p 2 × p x −2 × (1 − p )n −x −2+2 + n p
x
−
2
x =1
n X
n − 2 x −2
2
= n(n − 1)p
p
× (1 − p )(n−2)−(x −2) + n p
x
−
2
x =2
2
n
X
2
= n(n − 1)p 2 × (p + 1 − p )n−2 + n p.
portanto, V a r (X ) = n(n −1)p 2 ×(p +1−p )+n p −[n p ]2 = n p −n p 2 = n p (1−p ). A função geradora
de momentos é dada por,
n
n
X
X
tx
tx n
M X (t ) =
e P(X = x ) =
e
p x × (1 − p )n −x
x
x =0
x =0
n X
x
n
n
=
p e t × (1 − p )n −x = 1 − p + p e t .
x
x =0
Exemplo 3.4. A taxa de imunização de uma vacina é 80%. Se um grupo de 20 pessoas são vacinadas,
(a) Qual a probabilidade que 15 fiquem imunizadas?
Solução: Seja X o número de pessoas imunizadas em 20 então X ∼ b i n (20, 0.8). Logo,
20
P(X = 15) =
0, 815 × 0, 220−15 = 0, 1746.
15
(b) Qual a imunização média para um grupo de 20 pessoas?
Solução: E (X ) = 20 × 0, 8 = 16.
(c) Qual a probabilidade que a imunização seja superior a E (X ) + V a r (X ).
Solução: Tem-se que V a r (X ) = 20 × 0, 8 × 0, 2 = 3, 2. Assim,
P(X > 16 + 3, 2) = P(X > 20) = 0, 820 = 0, 0115.
3.5
Distribuição Geométrica
Considere uma seqüência independente de experimentos de Bernoulli,isto é, o espaço de probabilidade (Ω, F , P) associado ao experimento na i-ésima repetição é o mesmo em todas as repetições do experimento. Seja (Ω∞ , F∞ , P∞ ) o espaço de probabilidade associado ao experimento
composto de uma seqüência de repetições independentes e X uma variável aleatória neste espaço
tal que para um dado evento de interesse A ∈ F a variável aleatória X conta o número de vezes
que o experimento é repetido antes que o evento de interesse ocorra pela primeira vez, ou seja, X
é o “tempo de espera” antes que o evento de interesse aconteça. Esquematicamente,
A c × A c {z
× · · · × A}c ×A
|
x eventos
Nestas condições segue que a função de probabilidade de X é dado por,
P(X = x ) = p × (1 − p )x I {0,1,2,... } (x )
Em que p = P(A)(verifique!). Notação: X ∼ G eo(p ).
Outra maneira de modelar este experimento é fazer Y igual ao número de vezes que o experimento é repetido até que o evento de interesse ocorra pela primeira vez, isto é,
y eventos
z
}|
{
c
c
c
×A
.
A
×
A
×
·
·
·
×
A
|
{z
}
y-1 eventos
Logo,
P(Y = y ) = p × (1 − p )y −1 I {1,2,... } (y ).
Note que Y = X + 1, assim E (Y ) = E (X ) + 1 e V a r (Y ) = V a r (X ).
3.5.1
Esperança, variância e função geradora de momentos
Para X ∼ G eo(p ) tem-se que,
E (X ) =
∞
X
x P(X = x ) =
x =0
Agora note que,
∞
X
x p × (1 − p ) = p
x
x =1
∞
X
x × (1 − p )x .
x =1
−x (1 − p )x
∂
(1 − p )x = −x (1 − p )x −1 =
∂p
1−p
logo,
−(1 − p )
∂
(1 − p )x = x (1 − p )x
∂p
assim,
E (X ) = p
∞
X
−(1 − p )
x =0
∂
(1 − p )x
∂p
∞
X
∂
= −p (1 − p )
(1 − p )x .
∂
p
x =0
P∞
Agora, note que x =0 (1−p )x converge pois 1−p < 1, logo pode-se permutar a ordem do somatório
com a derivação, assim
∞
∂ X
E (X ) = −p (1 − p )
(1 − p )x
∂ p x =0
= −p (1 − p )
∂ 1
−1 1 − p
= −p (1 − p ) 2 =
.
∂p p
p
p
Vamos agora calcular o segundo momento para podermos determinar a variância de X . Assim,
E (X ) =
2
∞
X
x p × (1 − p ) = p
2
x =0
x
∞
X
x 2 × (1 − p )x .
x =0
Agora note que,
−x 2 (1 − p )x
∂
x (1 − p )x = −x 2 (1 − p )x −1 =
∂p
1−p
logo,
−(1 − p )
∂
x (1 − p )x = x 2 (1 − p )x
∂p
assim,
E (X 2 ) = p
∞
X
x 2 × (1 − p )x = p
x =0
∞
X
−(1 − p )
x =0
∂
x (1 − p )x
∂p
∞
X
∂
= −p (1 − p )
x (1 − p )x
∂
p
x =0
∞
∂ X
= −p (1 − p )
x (1 − p )x
∂ p x =0
= −(1 − p )
∞
∂ X
x (1 − p )x
∂ p x =0
∂ 1−p
∂ p p2
−p 2 − (1 − p )2p
p (p − 2)
= −p (1 − p )
= −p (1 − p )
4
p
p4
(1 − p )(p − 2) (1 − p )(2 − p )
=
.
=
p2
p2
= −p (1 − p )
portanto,
V a r (X ) =
(1 − p )(2 − p ) (1 − p )2 1 − p
−
=
p2
p2
p2
A função geradora de momentos é dada por,
M X (t ) =
∞
X
x =0
e t x p × (1 − p )x = p
∞
X
(1 − p ) × e t
x =0
x
=p
1
p
=
.
t
1 − (1 − p )e
1 − (1 − p )e t
Exemplo 3.5. Uma linha de fabricação de um equipamento de precisão é interrompida na primeira
ocorrência de um defeito. Feita a manutenção, a probabilidade do equipamento apresentar defeito
em um dia qualquer é 0,01. Deseja-se planejar o cronograma de manutenção preventiva e, para tal,
decidiu-se avaliar probabilisticamente a espera até a produção ser interrompida. Seja X a variável
aleatória que conta o número de dias que antecedem a interrupção. Admitindo que exista independência entre o desempenho nos sucessivos dias, qual o intervalo ideal para uma manutenção
preventiva, se desejamos uma probabilidade de, pelo menos, 0,90 que o defeito não ocorrerá?
Solução: Temos que X ∼ G eo(0, 01). Dessa forma, como X conta os dias antes a interrupção
ocorra, tem-se que,
P(X = x ) = 0, 01 × 0, 99x I {0,1,2,... } (x ).
Agora note que X = 0 é o evento “ocorrer um defeito no dia em que foi feita manutenção”, X = 1
é o evento “ocorrer um defeito um dia após a manutenção” assim X = k é o evento “ocorrer um
defeito no k-ésimo dia após a manutenção”. Deste modo, X > k é o evento “ocorrer um defeito
após o k-ésimo dia após a manutenção” que é igual o mesmo que “não ocorrer defeito até o k-ésimo
dia após a manutenção”. Assim, deseja-se determinar k tal que P(X > k ) ≥ 0, 9, ou P(X ≤ k ) ≤ 0, 10.
Assim,
k
X
P(X ≤ k ) =
0, 01 × 0, 99x ≤ 0, 10.
x =0
Agora note que
Sn = q 0 + q 1 + q 2 + · · · + q k
qS n = q 1 + q 2 + q 3 + · · · + q k +1
Logo, fazendo S n − qS n tem-se que,
(1 − q )S n = q 0 − q k +1 logo, S n =
1 − q k +1
.
1−q
portanto,
P(X ≤ k ) = 0, 01
1 − 0, 99k +1
= 1 − 0, 99k +1 ≤ 0, 1
1 − 0, 99
assim,
0, 99k +1 ≥ 0, 90 ⇒ k + 1 ≤
portanto, k ≤
ção.
3.5.2
ln(0,9)
ln(0,99)
ln(0, 9)
ln(0, 99)
− 1 = 10, 48 − 1 = 9, 48. Logo, a manutenção deve ser feita após 9 dias de opera-
Falta de memória da Geométrica
Seja X ∼ G eo(p ) e vamos verificar que, para quaisquer números inteirar positivos m e n, vale
P(X ≥ m + n|X ≥ m ) = P(X ≥ n ).
Essa propriedade é conhecida como falta de memória. Ela indica a maneira como a variável incorpora a informação anterior. Em termos ilustrativos, podemos considerar que a variável "lembra"do presente, mas "esqueceu"do que ocorreu no passado. Por exemplo, se X representasse a
espera em dias para a ocorrência de um certo evento, a probabilidade condicional acima representaria a probabilidade de espera de pelo menos m + n dias, sabendo que o evento não ocorreu
antes de m dias. A propriedade da falta de memória estabelece que essa probabilidade é a mesma
de esperar pelo menos n dias. Para verificar a propriedade, observe que
P(X ≥ m + n|X ≥ m ) =
P(X ≥ m + n, X ≥ m ) P(X ≥ m + n)
=
P(X ≥ m )
P(X ≥ m )
Agora note que, para qualquer inteiro positivo a tem-se
P(X ≥ a ) = 1−P(X < a ) = 1−P(X ≤ a −1) = 1−p
a −1
X
x =0
Deste modo,
P(X ≥ m + n|X ≥ m ) =
(1−p )x = 1−p
1 − (1 − p )a
= 1−1+(1−p )a = (1−p )a .
p
(1 − p )m +n
= (1 − p )n .
m
(1 − p )
3.6
Distribuição Binomial Negativa
Considere uma sequência de ensaios de Bernoulli independentes, seja A o evento de interesse.
O experimento que dá origem a variável aleatória com distribuição Binomial Negativa é o seguinte:
Repetir o experimentos de de Bernoulli de maneira independente e parar quando o o evento de
interesse A ocorra pela r-ésima vez. Do mesmo modo que no caso da variável com distribuição
geométrica, pode-se definir X de maneiras diferentes, cada qual dando origem a uma variação da
distribuição Binomial Negativa.
Definindo X como o número de vezes que o evento A c ocorre antes que o evento de interesse
A ocorra pela r-ésima vez que é igual número de vezes que o evento A c ocorre até que o evento de
interesse A ocorra pela r-ésima vez, isto é,
x+r repetições do experimento até que A ocorra pela r-ésima vez
}|
{
z
·|· · × A c ×{z
A × · · · × A}c ×A
(3.1)
x ocorrências de A c e (r-1) ocorrências de A
Note que deste modo, a única posição fixa é a do evento A no final, assim as posiçôs dos outros
eventos nas primeiras x + r − 1 posições são aleatórias. Portanto, a probabilidade do evento em
(??) ocorrer é a probabilidade de
·|· · × A c ×{z
A × · · · × A}c
x ocorrências de A c e (r-1) ocorrências de A
ocorrer, que é uma binomial com parâmetros x + r − 1 e p calculada no ponto r − 1, vezes a probabilidade de A ocorrer a final, que devido ao fato dos eventos serem independentes é dado por
p . Nestas condições, segue que a função de probabilidade de X é dado por,
x +r −1 r
P(X = x ) =
p × (1 − p )x I {0,1,2,... } (x )
r −1
Em que p = P(A). Notação: X ∼ B N (r, p ).
x +r −1
Note que r −1 conta o número de permutações com repetição dos x + r − 1 elementos, em
que A aparece r − 1 vezes e A c x vezes. Deste modo, se considerarmos as posições em que os
eventos aparecem, então o número de permutações com repetição dos x + r − 1 elementos será
igual a combinação simples das x + r − 1 posições distintas tomadas (r − 1) a (r − 1).
Outra maneira de definir a variável aleatória com distribuição Binomial Negativa é definir Y
como sendo o número de repetições até que o evento de interesse A ocorra pela r-ésima vez, isto
é,
y repetições do experimento até que A ocorra pela r-ésima vez
z
}|
{
·|· · × A c ×{z
A × · · · × A}c ×A
y-1 repetições do experimento e r-1 ocorrências de A
Deste modo, a função de probabilidade de Y é dado por,
y −1 r
P(Y = y ) =
p × (1 − p )y −r I Y ≥r (y )
r −1
Note que Y = X + r . Logo, E (Y ) = E (X ) + r e V a r (Y ) = V a r (X ).
3.6.1
Esperança, variância e função geradora de momentos
Observação 3.1. Para demonstrar os resultados a seguir, considere os seguintes fatos:
∞
f (b ) =
X
bx
1
(x )
=
f
(0)
(1 − b )r x =0
x!
em que,
(x )
f
∂x
.
(0) =
f
(b
)
∂ bx
b =0
Agora note que,
f (x ) (0) = r × (r + 1) × (r + 2) × · · · × (r + x − 1) =
(r + x − 1)!
(r − 1)!
Logo,
∞
∞ X
1
(r + x − 1)! b x X x + r − 1 x
=
=
b
(1 − b )r x =0 (r − 1)! x ! x =0
r −1
Assim,
∞
X
∞ X
x +r −1 x r
P(X = x ) =
b p × (1 − p )x
r
−
1
x =0
x =0
∞ X
x +r −1 x
r
=p
b (1 − p )x
r
−
1
x =0
= pr ×
1
1
= p r r = 1.
r
(1 − (1 − p ))
p
outro fato é,
x +r −1
(x + r − 1)! (x + r − 1)!
x +r −1
=
=
=
r −1
(r − 1)!x !
x !(r − 1)!
x
Assim, para X ∼ B N (p ) tem-se que,
∞
X
x +r −1 r
E (X ) =
x
p × (1 − p )x
r
−
1
x =0
∞
X
x +r −1 r
=
x
p × (1 − p )x
x
x =0
=
∞
X
(x + r − 1)! r r
p × (1 − p )x
(x
−
1)!(r
−
1)!
r
x =1
∞
X
(x + r − 1)! r
=
r
p × (1 − p )x
(x − 1)!r !
x =1
∞
X x + r − 1
=
r
p r × (1 − p )x
x
−
1
x =1
fazendo z = x − 1 tem-se que,
E (X ) = r
∞ X
z +r
z
z =0
= r (1 − p )
p r × (1 − p )z +1
∞ X
z +r
z =0
∞ X
r
p r × (1 − p )z
z + (r + 1) − 1 r
= r (1 − p )
p × (1 − p )z
(r
+
1)
−
1
z =0
∞ (1 − p ) X z + (r + 1) − 1 r +1
=r
p
× (1 − p )z
p
(r
+
1)
−
1
z =0
fazendo s = r + 1 tem-se que
∞ r (1 − p ) X z + s − 1 s
p × (1 − p )z .
E (X ) =
p
s
−
1
z =0
|
{z
}
=1
Logo,
E (X ) =
r (1 − p )
p
So mesmo modo, segue que,
V a r (X ) =
r (1 − p )
p2
e a fgm,
M X (t ) =
p
1 − (1 − p )e t
r
se t < −l o g (1 − p ).
Exemplo 3.6. Suponha que P(nascimento de menino) = 0, 5. Um casal quer ter exatamente duas
meninas e terá filhos até essa condição ser satisfeita.
(a) Qual é a probabilidade da família ter x filhos homens?
Solução. Seja A= a criança é uma menina. Assim, X será o número de meninos que irão
nascer antes que a segunda menina nasça. Neste caso X ∼ B N (2, 0.5), assim,
x +2−1
3
2
2
P(X = x ) =
0, 5 × (1 − 0, 5) =
0, 52 × (0, 5)x ;
2−1
1
(b) Qual é a probabilidade da família ter quatro filhos?
Solução. Seja Y ∼ B N (2, 0.5) o número de filhos que o casal irá ter antes que nasça a segunda menina, então
4−1
3
2
4−2
P(Y = 4) =
0, 5 × (1 − 0, 5) =
0, 52 × 0, 52 = 0, 1875;
2−1
1
(c) Qual é a probabilidade de a família ter no máximo quatro filhos?
Solução. Tem-se que,
P(Y ≤ 4)) = P(Y = 2) + P(Y = 3) + P(Y = 4) pois y deve ser ≥ r
2−1
3−1
4−1
2
2−2
2
3−2
=
0, 5 × 0, 5 +
0, 5 × 0, 5 +
0, 52 × 0, 54−2
2−1
2−1
2−1
= 0, 25 + 0, 25 + 0, 1875 = 0, 6875
(d) Quantos filhos homens espera-se que essa família tenha? Quantos filhos espera-se que essa
família tenha?
Solução. Tem-se que,
E (X ) =
2 × (1 − 0, 5)
=2
0, 5
e
E (Y ) = E (X ) + r = 2 + 2 = 4.
3.7
Distribuição Hipergeométrica
Considere um conjunto de n elementos dos quais em m observa-se um certo evento de interesse A e em n − m observa-se A c . Suponha agora o seguinte experimento: selecionar aleatoriamente r elementos dentre os n possíveis. Seja X a variável aleatória que conta o número de vezes
que o evento de interesse ocorre no conjunto selecionado. Deste modo, a função de probabilidade
de X é dada por,
m n −m
( x )(nr −x ) se max{0, r − (n − m )} ≤ x ≤ min{r, m }
(r )
P(X = x ) =
0
caso contrário
De fato, note que dado r elementos em que A aparece x vezes e A c r − x vezes,
A × {z
· · · × A} × |
A c × {z
. . . × A}c
|
x vezes
(r −x ) vezes
a probabilidade desse evento ocorrer é o número de permutações com repetição dos elementos A
e A c , que nesse caso é igual a combinações simples de r elementos tomados x a x vezes a probabilidade do evento acima ocorrer, assim
r
P(X = x ) =
P A
· · · × A} × |
A c × {z
. . . × A}c
| × {z
x
x vezes
(r −x ) vezes
r
−x −1 c
−1
A
A × P A c |X ix=1 A × · · · × P A c |X ix=1 AX jr =1
=
P(A) × · · · × P A|X ix=1
x
r!
m
m −x +1 n −m
m − n − (r − x ) + 1
=
×
× ··· ×
×
× ···
x !(r − x )! n
n −x +1
n −x
n − x − (r − x ) + 1
r!
m!
(n − m )!
(n − r )!
=
x !(r − x )! (m − x )! (n − m − (r − x ))! n!
=
=
(n −m )!
m!
x !(m −x )! (r −x )!(n−m −(r −x ))!
n!
r !(n −r )!
m n−m r −x
x
se max{0, r
n
r
− (n − m )} ≤ x ≤ min{r, m }
Notação: X ∼ H g eo(n, m , r ).
3.7.1
Esperança, variância e função geradora de momentos
Seja X ∼ H g eo(n, m , r ), então:
E (x ) = r p,
V a r (X ) =
n −r
r p (1 − p )
n −1
, e fgm não possui uma forma simples..
em que p = m
n
3.8
Distribuição de Poisson
Seja X uma variável aleatória que conta o número de ocorrência de um determinado evento
A por unidade (tempo, comprimento, área, volume, etc), então a função de probabilidade de X é
dada por,
( −λ x
e λ
se x = {0, 1, . . . , }
x!
P(x ) =
0
caso contrário
Esta função é chamada de distribuição de Poisson. Notação: X ∼ P (λ)
3.8.1
Esperança, variância e função geradora de momentos
E (X ) =
∞
∞
X
e −λ λx X e −λ λλx −1
x
=
x!
(x − 1)!
x =0
x =1
= λe
−λ
∞
∞
X
X
λy
λx −1
−λ
= λe
(x − 1)!
y!
y =0
x =1
= λe −λ e λ = λ
e, agora note que x 2 = x (x − 1) + x , assim
E (X 2 ) =
∞
X
∞
x2
x =0
=
∞
X
e −λ λx X
e −λ λx
=
[x (x − 1) + x ]
x!
x!
x =0
∞
x (x − 1)
x =0
=
e −λ λx X e −λ λx
+
x
x!
x!
x =0
∞
X
e −λ λ2 λx −2
x =2
=λ e
(x − 2)!
2 −λ
∞
X
λy
y =0
y!
+λ
+ λ = λ2 e −λ e λ + λ
=λ +λ
2
Portanto,
V a r (X ) = λ2 + λ − λ2 = λ
A fgm da Poisson é dada por,
M X (t ) = e λ(e
t −1
).
Exemplo 3.7. Num livro de 800 páginas há 800 erros de impresão. Qual a probabilidade de que
uma página escolhida ao acaso contenha pelo menos 3 erros?
Solução: Seja X a variável aleatória que conta o número de erros por página, assim
λ = E (X ) =
800
=1
800
Portanto,
PX (X ≥ 3) = 1 − PX (X < 3) = 1 − [PX (0) + PX (1) + PX (2)]
−1 0
e −1 11 e −1 12
e 1
+
+
=1−
0!
1!
2!
1
= 1 − e −1 1 + 1 +
= 1 − 2, 5e −1
2
= 0, 0803
Exemplo 3.8. Numa central telefônica chegam 300 telefonemas por hora. Qual a probabilidade de
que:
(a) Num minuto não haja nemhum chamado?
(b) Em 2 minutos haja 2 chamadas?
(c) Em t minutos, não haja chamadas?
Solução:
(a) Seja X a variável aleatória que conta o número de chamadas por minuto. Assim,
λ = E (X ) =
300
=5
60
Portanto,
e −5 50
= e −5 = 0, 0067
0!
(b) Seja X 2 a variável aleatória que conta o número de chamadas por cada 2 minuto. Assim,
PX (0) =
λ2 = E (X 2 ) =
300
= 10
30
Portanto,
e −10 102
= 50e −10 = 0, 0023
2!
(c) Seja X 2 a variável aleatória que conta o número de chamadas por cada t minuto. Assim,
PX 2 (2) =
λt = E (X t ) =
300
60
t
= 5t
Portanto,
e −5t (5t )0
= e −5t .
0!
Observação 3.2. Do exemplo anterior pode-se concluir que a probabilidade de ocorrência de um
determinado evento A em t unidades é dada por,
( −λ t x
e
(λ t )
se x = {0, 1, . . . , }
x!
PX t (x ) =
0
caso contrário
PX t (0) =
3.8.2
Relação entre Poisson e Binomial
Seja uma seqüência de experimentos de Bernoulli. Seja X uma variável aleatória que conta o
número de ocorrência de um evento de interesse A nessa seqüência de experimentos de Bernoulli,
suponha ainda que
λ
E (X ) = lim n p = λ. ⇒ p = lim
n →∞
n →∞ n
Então,
n
P(X = x ) = lim
p x × (1 − p )n −x
n →∞ x
x 1 − λ n −x
n
λ
×
= lim
n →∞ x
n
n
x
λ
n × (n − 1) × · · · × (n − x + 1)
λ −x
λ n
=
lim
1−
1−
x ! n →∞
nx
n
n
Agora note que,
λ
lim 1 −
n→∞
n
−x
=1
n x + T (n x −1 )
T (n x −1 )
n × (n − 1) × · · · × (n − x + 1)
=
lim
=
1
−
=1
n →∞
n →∞
nx
nx
nx
λ n
lim 1 −
= e −λ
n →∞
n
lim
e
Logo,
P(X = x ) =
λx −λ
e
x!
Capítulo 4
Modelos Probabilísticos para variáveis
aleatórias Contínuas
Neste capítulo vamos apresentar alguns dos modelos mais usuais para variáveis aleatórias contínuas a saber: uniforme, normal, exponencial, t-Student, gama, qui-quadrado, e F de Fisher. Existem ainda muitos outros modelos, entretanto, estes são os mais conhecidos.
4.1
Distribuição Uniforme
Seja X uma variável aleatória contínua cuja função densidade é dada por,
f (x ) =
1
I [a ,b ] (x )
b −a
então X tem distribuição uniforme no intervalo [a ,b ]. Deste modo, sua função de distribuição é,
Rx
Rx
1. para x < a , F (x ) = −∞ f (x )d x = −∞ 0d x = 0;
2. para a ≤ x ≤ b ,
a
Z
F (x ) =
0d x +
−∞
3. para x > b ,
Z
a
a
Z
F (x ) =
b
0d x +
−∞
Assim,
x
Z
a
b
1
x x −a
dx =
=
.
b −a
b − a a b − a
1
dx +
b −a
Z
0
se x < a
1
se x > b
F (x ) = bx −a
−a
∞
0d x =
b
b −a
= 1.
b −a
se a ≤ x ≤ b
Note que, F é contínua, pois F (a − ) = F (a + ) = F (a ) = 0, F (b − ) = F (b + ) = F (b ) = 1 e nas regiões
restantes ela é também contínua, pois as funções, F (x ) = 0, F (x ) = 1 e F (x ) = bx −a
são também
−a
contínuas.
Notação: X ∼ U [a ,b ].
63
4.1.1
Esperança, variância e função geradora de momentos
Se X ∼ U (a ,b ) então:
Z
∞
b
Z
E (X ) =
x d F (x ) =
−∞
b2 − a2
a
b
1
1 x 2 x
dx =
b −a
b − a 2 a
(b − a )(b + a ) b + a
=
=
.
=
2(b − a )
2(b − a )
2
∞
Z
E (X ) =
b
Z
b
1
1 x 3 x
dx =
b −a
b − a 3 a
x d F (x ) =
2
2
−∞
2
a
(b − a )(b 2 + a b + a 2 ) b 2 + a b + a 2
b3 − a3
=
=
=
3(b − a )
3(b − a )
b −a
Assim,
b2 + ab + a2
b + a 2 (b − a )2
V a r (X ) =
−
=
.
b −a
2
12
A FGM é dada por,
Z
b
M X (t ) =
=
Z
b
e d F (x ) =
tx
e
a
e bt
a
tx
b
1 1 t x 1
dx =
e b −a
b −a t
a
− e at
(b − a )t
Observação 4.1. Para a = 0 e b = 1, tem-se X ∼ U [0, 1] e
0 se x < 0
F (x ) = x se 0 ≤ x ≤ 1
1 se x > 1
Exemplo 4.1. Considere o experimento de medir a corrente em um fio de cobre. Seja X a variável
aleatória que denota a corrente medida. Supondo que 0 ≤ X ≤ 20 m A e que
(
0, 05 se 0 ≤ x ≤ 20
f (x ) =
0
caso contrário
Qual a probabilidade da corrente medida está entre 5 e 10 miliamperes? Qual o valor esperado e a
variância da corrente medida?
Solução: Tem-se que a = 0 e b = 20, assim
Z 10
P(5 ≤ X ≤ 10) = F (10) − F (5) =
0, 05d x = 0, 05 × (10 − 5) = 0, 25
5
E (X ) =
e
V a r (x ) =
20 + 0
= 10
2
(20 − 0)2
= 33, 33
12
Proposição 4.1. Sejam X e U variáveis aleatórias com funções de distribuição FX e uniforme em
[0, 1] respectivamente. Então,
(i) Se FX for contínua, Y = FX (X ) terá distribuição uniforme em [0, 1], isto é, FX (X ) ∼ U [0, 1];
(ii) Se FX for contínua à direita, Y = FX−1 (U ) terá função de distribuição FX , em que FX−1 (u ) = inf{x ∈
R : FX (x ) ≥ u } é a inversa generalizada de FX .
Demonstração. Note que Y = FX (X ) será um valor entre 0 e 1, pois FX : R → [0, 1], assim para y < 0
tem-se que FY (y ) = P(Y ≤ y ) = 0 e para y > 1 tem-se FY (y ) = 1. Agora para 0 ≤ y ≤ 1 tem-se,
FY (y ) = P(Y ≤ y ) = P FX (X ) ≤ y = P X ≤ FX−1 (y ) , pois FX é não decrescente
= FX FX−1 (y )
em que FX−1 é a inversa generalizada de FX . Pode-seprovar que para o caso em que FX é continua
e FX−1 é a inversa generalizada de FX que FX FX−1 (y ) = y veja (NASCIMENTO, 2006 - p. 151)assim
FY (y ) = y , logo Y ∼ U [0, 1].
Suponha agora que FY é contínua à direita e Y = FX−1 (U ), então
FY (y ) = P(Y ≤ y ) = P FX−1 (U ) ≤ y = P U ≤ FX (y ) = FX (y ).
Exemplo 4.2. Seja X ∼ b e r (0, 3), assim
0
FX (x ) = 0, 7
1
se x < 0
se 0 ≤ x < 1
se x ≥ 1
Suponha que os seguintes valores são de uma variável aleatória com distribuição uniforme em [0, 1],
U
0,65
0,40
0,27
0,89
0,62
0,46
0,14
0,61
0,69
0,77
Agora note que
(
FX−1 (u ) = inf{x ∈ R : FX (x ) ≥ u } =
inf{[0, ∞)} = 0 se 0 ≤ u ≤ 0, 7
inf{[1, ∞)} = 1 se 0, 7 < u ≤ 1
Assim, o conjunto de valores para X ∼ b e r (0, 3) é:
U
X
4.2
0,65
0
0,40
0
0,27
0
0,89
1
0,62
0
0,46
0
0,14
0
0,61
0
0,69
0
0,77
1
Distribuição Normal
Dizemos que uma v.a. X tem distribuição normal com média µ e variância σ2 se sua função
densidade de probabilidade é dada por
1
(x − µ)2
f (x ) = p
exp −
2σ2
2πσ2
para todo x ∈ R. Notação: X ∼ N (µ, σ2 ).
4.2.1
Esperança, variância e função geradora de momentos
Se X ∼ N (µ, σ2 ) então,
∞
(x − µ)2
dx
E (X ) =
xp
exp −
2
2
2σ
2πσ
−∞
Z
1
fazendo a transformação,
y=
x −µ
⇒ x = σy + µ
σ
tem-se que,
d x = σd y
assim,
∞
Z
y2
exp −
E (X ) =
(σy + µ) p
σd y
2
2πσ2
−∞
Z∞
Z∞
1
1
y2
y2
µ p exp −
dy +
dy
σy p exp −
=
2
2
2π
2π
−∞
−∞
Z∞
Z∞
y2
y 1
1
y2
=σ
dy +µ
dy
p p exp −
p exp −
2
2
π
2π
−∞ | 2
−∞
{z
}
{z
}
|
1
=g (y )
=1
Agora note que,
−y 1
(−y )2
y 1
y2
g (−y ) = p p exp −
= − p p exp −
= −g (y )
2
2
2 π
2 π
logo, g (y ) é uma função impar, portanto,
Z
∞
Z
0
g (y )d y =
−∞
∞
Z
g (y )d y +
−∞
∞
Z
g (y )d y = −
∞
Z
g (y )d y +
0
0
g (y )d y = 0
0
Deste modo, E (X ) = µ.
Do mesmo modo,
∞
(x − µ)2
V a r (X ) =
(x − µ) p
exp −
dx
2σ2
2πσ2
−∞
Z∞
y2
2 2 1
=
σ y p exp −
dx
2
2π
−∞
Z
2
1
= σ2
e
M X (t ) = e t µ+
t 2 σ2
2
.
fazendo y =
x −µ
σ
4.2.2
Principais Características
1. A curva é simétrica em torno de x = µ, isto implica que dado um a ∈ R tem-se que f (µ −
a ) = f (µ + a ), logo F (µ − a ) = P(X ≤ µ − a ) = P(X ≥ µ + a ) = 1 − F (µ + a ) se µ = 0 então
F (−a ) = 1 − F (a );
2. A moda, mediana e a média são iguais. De fato, a mediana é o ponto(m) para o qual para o
caso em que X é contínua, PX (X ≤ m ) = PX (X ≥ m ) = 0, 5. Assim, para a = 0 em F (µ − a ) =
1 − F (µ + a ) tem-se,
P(X ≤ µ − 0) = P(X ≤ µ) = F (µ) = P(X ≥ µ) = 1 − F (µ)
logo, 2F (µ) = 1 assim F (µ) = 0, 5. Portanto, m = µ = E (X ). A moda é dada por,
∂
∂ ln(f (x ))
=
∂x
∂x
1
ln p
2πσ2
(x − µ)2
−
2σ2
=−
x −µ
=0
σ2
logo, x max = µ = E (X ).
Problema: Dificuldade no cálculo de PX . Existem tabelas apenas para X ∼ N (0, 1).
Solução: Fazendo a transformação,
z = h(x ) =
x −µ
⇒ h −1 (z ) = σz + µ
σ
segue que o jacobiano da transformação é dado por
J (x , z ) =
∂ h −1 (z )
=σ
∂z
assim,
(σz + µ − µ)2
1
1
σ2 z 2
exp −
f Z (z ) = f X h (z ) J (x , y ) = p
× σ = p exp −
2
2σ2
2σ2
2π
2πσ
2
1
z
= p exp −
.
2
2π
−1
Portanto a variável aleatória Z tem distribuição normal com média 0 variância 1. Deste modo
pode-se utilizar as tabelas para distribuições normais com média zero e variância 1 para calcular
a probabilidade de variáveis com distribuições normais com média µ e variância σ2 . Deste modo,
X −µ x −µ
x −µ
≤
=P Z ≤
.
P(X ≤ x ) = P
σ
σ
σ
Notação: a distribuição de Z é chamada de normal padrão e sua função de distribuição denotada por Φ, assim P(Z ≤ z ) = Φ(z ).
Exemplo 4.3. Seja X ∼ N (100, 25), calcular:
(a) P(100 ≤ X ≤ 106);
(b) P(X ≥ 108);
(b) P(X ≥ x ) = 0, 025;
Solução:
p
(a) Tem-se que σ = 25 = 5, assim,
P (100 ≤ X ≤ 106) = P
100 − 100
106 − 100
≤Z ≤
5
5
= P(0 ≤ Z ≤ 1, 2) = Φ(1, 2) − Φ(0).
Da tabela: Φ(0) = 0, 5 e Φ(1, 2) = 0, 8849, assim P (100 ≤ X ≤ 106) = 0, 8849 − 0, 5 = 0, 3849.
(b)
108 − 100
P(X ≥ 108) = P Z ≥
= P(Z ≥ 1, 6) = 1 − P(Z ≤ 1, 6) = 1 − Φ(1, 6) = 1 − 0, 9452 = 0, 0548.
5
x −100
(c) P(X ≥ x ) = P Z ≥ x −100
=
1
−
P
Z
≤
= 1 − Φ(z ) = 0, 025 portanto Φ(z ) = 0, 975 da
5
5
tabela tem-se que: z = 1, 96, logo
1, 96 =
x − 100
⇒ x = 5 × 1, 96 + 100 = 109, 8.
5
Notação: Denotaremos por z α a seguinte quantidade P(Z ≥ z α ) = α, logo pela simetria P(Z ≤
−z α ) = α. Assim do exemplo anterior teríamos x = 5 × z 0,025 + 100. z α ) é chamado de α quantil da
normal padrão.
4.2.3
Convergência em Distribuição de Variáveis Aleatórias
Definição 4.1 (Convergência em distribuição). Sejam {X n , n ≤ 1} e X duas variáveis aleatórias com
funções de distribuição {Fn , n ≤ 1} e F , respectivamente. Então X n converge em distribuição para X
se para todo x ∈ R em que F é continua, tivermos
lim Fn (x ) = F (x ).
n→∞
d
Notação: X n −→ X .
Teorema 4.1 (Teorema Central do Limite - variáveis aleatórias i.i.d.). Seja {X n , n ≥ 1} uma seqüência de variáveis aleatóriasPindependentes e identicamnte distribuídas, com média µ e variancia
n
σ2 < ∞. Então, para S n = i =1 X n , tem-se
S n − E (S n ) S n − nµ d
=
−→ Z ∼ N (0, 1)
p
p
σ n
V a r (S n )
Demonstração. Tem-se para Yi =
X i −µ
σ
que,
S n − nµ
=
p
σ n
Pn
i =1
p
n
Yi
em que, {Yi , i ≥ 1} é uma seqüência de variáveis aleatórias independentes e identicamente distribuídas, com média 0 e variância 1, e função geradora de momentos M Y (t ). Assim,
M
Pn
ip
=1 Yi
n
(t ) = M
Pn
i =1 Yi
t
p
n
=
n
Y
MY
i =1
t
p
n
n
t
= MY p
n
Fazendo a expansão em séries de Taylor ao redor de zero até o termo de 2a. ordem tem-se que,
2
t
t
1 t 2 00
t
0
MY p
= M Y (0) + p M Y (0) +
M Y (0) + o
2! n
n
n
n
em que o(x ) é uma função tal que
o(x )
= 0.
x →∞ x
lim
0
Agora note que pelas propriedades da fgm que: M Y (0) = 1, M Y (0) = E (Yn ) = 0 e
00
M Y (0) = E (Yn2 ) = V a r (Yn ) + E (Yn ) = 1
assim,
MY
t
p
n
t2
2
t2
= 1 + +o
n
n
t2
t2
o
= 1 + 2 1 + 2 t 2n
n
n
Agora note que,
lim
n →∞
assim
1−2
o
t2 !
n
t2
n
=1
2 !n
n
t2
o tn
t
t2
2
lim M Y p
= lim 1 −
1−2 t2
= e− 2 .
n →∞
n→∞
n
n
n
Logo pelo Teorema da Continuidade de Levy tem-se que,
S n − nµ
σ
p
n
d
−→ N (0, 1).
Teorema 4.2 (Moivre-Laplace). Seja {X n , n ≥ 1} uma seqüência de variáveis aleatórias independentes e identicamente distribuídas, com distribuição de Bernoulli de parâmetro p. Então,
Sn − n p
d
−→ Z
p
n p (1 − p )
Na prática se max n p, n(1 − p ) ≥ 10 então a aproximação é aceitável. Alguns autores consi
deram max n p, n(1 − p ) ≥ 5.
Exemplo 4.4. Suponha que 25% de todos os motoristas habilitados de um determinado estado não
possuam seguro. Seja X o número de motoristas sem seguro em uma amostra aleatória de 50 motoristas. Qual a probabilidade de no máximo 5 terem seguro? e no máximo 10?
Solução: Os valores exatos são 0, 007046 e 0, 2622. Utilizando a aproximação normal tem-se que
P(X ≤ 5) ≈ Φ Z ≤ p
!
5 − 50 × 0, 25
= P(Z ≤ −2.449) =
50 × 0, 25 × 0, 75
e
10 − 50 × 0, 25
P(X ≤ 10) ≈ Φ Z ≤ p
50 × 0, 25 × 0, 75
4.3
!
= P(Z ≤ −0.816) =
Distribuição Exponencial
Seja X uma variável aleatória contínua cuja função densidade é dada por,
f (x ) = λe −λx I [0,∞ (x )
então X tem distribuição exponencial com parâmetro λ. Notação: X ∼ Exp(λ).
Sua função de distribuição é,
1. Para x < 0, tem-se F (x ) = 0;
2. Para x ≥ 0
Z
x
F (x ) =
Z
0
f (x )d x =
−∞
x
Z
0d x +
−∞
λe −λx d x = 1 − e −λx
0
Assim,
(
F (x ) =
4.3.1
0
se x < 0
1 − e −λx
se x < 0
Esperança, variância e função geradora de momentos
Se X ∼ Exp(λ) então:
E (X ) =
1
1
, V a r (X ) = 2
λ
λ
e
M X (t ) =
λ
λ−t
para t < λ.
Observação 4.2. Algumas aplicações da distribuição exponencial incluem modelar tempo de vida
de equipamentos e o tempo entre ocorrências de eventos em um experimento de Poisson.
Exemplo 4.5. Suponha que o tempo de resposta para uma consulta feita em um terminal tenha
uma distribuição de poisson com com tempo de resposta médio igual a 5 s . Qual a probabilidade
que o tempo de resposta exceda 10 s ?
Solução: Seja X o tempo de resposta, então
E (X ) = 5 =
1
, logo λ = 0, 2
λ
Assim,
P(X > 10) = 1 − P(X ≤ 10) = 1 − [1 − e −0,2×10 ] = e −2 = 0, 135.
4.3.2
Relação entre Exponencial e Poisson
Seja X uma variável aleatória que conta o número de vezes que um evento de interesse ocorre
em um certo intervalo unitário de tempo, supondo que X tem distribuição de Poisson com parâmetro λ, então a variável aleatória que conta o número de vezes que um evento de interesse ocorre
em t unidades de tempo terá distribuição de Poisson com parâmetro λt , isto é, X t ∼ P (λt ). Seja
T o tempo decorrido entre duas ocorrências do parâmetro de interesse, então note que
{T > t } = {Nenhuma ocorrência do evento de interesse em t unidades de tempo} = {X t = 0}
Logo,
P(T ≤ t ) = 1 − P(T > t ) = 1 − P(X t = 0) = 1 −
e λt (λt )0
= 1 − e λt
0!
Portanto, T ∼ Exp(λ).
Exemplo 4.6. Considere que o número de chamadas em um serviço de suporte técnico 24 horas
de uma empresa tenha uma distribuição de Poisson com média de 0, 5 chamada por dia. Qual a
probabilidade de passar mais de dois dias até ocorrer uma chamada?
Solução: Para X = número de chamada por dia, tem-se que X ∼ P (0, 5), logo para um período
de t dias X t ∼ P (λt ). Assim para T = tempo entre duas chamadas, obtemos
P(T > 2) = P(X 2 = 0) =
e −0,5×2 × (0, 5 × 2)0
= e −1 = 0, 3679
0!
Proposição 4.2 (Falta de Memória). Seja T uma variável aleatória com função densidade f , então
para s , t ≥ 0
P(T ≥ t + s |T ≥ s ) = P(T ≥ t )
se, e somente se, T ∼ Exp(λ).
Solução: Vamos mostrar apenas a primeira parte: Se T ∼ Exp(λ) então T tem a propriedade de
falta de memória, para demonstração completa veja (NASCIMENTO, 2006). De fato,
P (T ≥ t + s , T ≥ s )
T ≥s
P (T ≥ t + s ) P (T > t + s )
=
=
P(T ≥ s )
P(T > s )
−(t
P (X t +s = 0) e +s )λ
=
=
P (X s = 0)
e −s λ
= e −(t +s )λ e s λ = e −t λ = P(T > t ).
P(T ≥ t + s |T ≥ s ) =
4.4
Distribuição Gama
Diz-se que uma variável aleatória X tem distribuição Gama com parâmetros α e β se sua densidade é dada por,
β α α−1 −β x
f (x ) =
x e
I (0,∞) (x )
Γ(α)
em que α, β > 0 e
∞
Z
x α−1 e −x
Γ(α) =
0
é a função gama. Notação: Se X ∼ Gama(α, β ).
4.4.1
Propriedades da função gama
Algumas propriedades da função gama são:
1. Γ(α + 1) = αΓ(α);
2. Se α for um inteiro positivo então Γ(α + 1) = α!;
p
3. Γ 12 = π.
Casos especias da distribuição Gama
1. Se α = 1 então X ∼ E x p (β );
2. Se α = ν /2, ν inteiro e β = 1/2 então X ∼ χ 2 (ν ), isto é, x tem distribuição qui-quadrado com
ν graus de liberdade;
3. Se α = k , k inteiro então X ∼ E r l k (β ), isto é, x tem distribuição Erlang de ordem k.
4.4.2
Esperança, variância e função geradora de momentos
Se X ∼ Gama(α, β ) então:
E (X ) =
α
α
, V a r (X ) = 2
β
β
e
M X (t ) =
4.5
β
β −t
α
.
Distribuição Qui-quadrado
Diz-se que uma variável aleatória X tem distribuição Qui-quadrado com ν graus de liberdade
se sua densidade é dada por,
1 ν /2
f (x ) =
para ν inteiro. Notação: Se X
∼ χ 2 (ν ).
2
Γ(ν /2)
x
x ν /2−1 e − 2 I (0,∞) (x )
4.5.1
Esperança, variância e função geradora de momentos
Se X ∼ χ 2 (ν ) então:
E (X ) = ν , V a r (X ) = 2ν
e
1
2
M X (t ) =
1
2
−t
! ν2
ν
= (1 − 2t )− 2
Exemplo 4.7 (Ex.57,seção 4.4-Devore). Suponha que o tempo gasto por um aluno, selecionado aleatoriamente, que usa um terminal conectado a um servidor com "‘time-sharing"’, tem uma distribuição gama com média 20 min e variância de 80 min2 .
(a) Quais são os valores de α e β ?
(b) Qual a probabilidade de um aluno usar o terminal por no máximo 24 minutos?
(c) Qual a probabilidade de um aluno passar entre 20 e 40 minutos usando o terminal?
Solução:
(a) Tem-se que,
E (X ) =
α
α
= 20 e V a r (X ) = 2 = 80
β
β
Assim, α = 5 e β = 14 ;
(b) Deseja-se utilizar a tabela de Qui-quadrado, assim fazendo a transformação Y = k X em que
X ∼ Gama(α, β ), então
Ç
2ν
2 α
V a r (Y ) = 2ν = V a r (k X ) = k 2 assim k = β
β
α
portanto,
0
ν = E (Y ) = E (k X ) = k E (X ) =
p
Deste modo, Y ∼ χ 2
2αν . Assim,
p
2αν .
Ç
P(X ≤ x ) = P(Y ≤ k x ) = P Y ≤ β
2ν
x
α
Logo, para α = 5, β = 14 e escolhendo ν = 10, tem-se que k = 0, 5 e ν = 10, assim
0
P(X ≤ 24) = P(Y ≤ 0, 5 × 24) = P(Y ≤ 12) = 0, 7149.
Melhor fazer a seguinte transformação,
Proposição 4.3. Seja X 1 , . . . , X n uma amostra aleatória de uma distribuição normal com parâmetros µ e σ2 , então
Pn
(X i − X )2
(n − 1)S 2
i =1
=
∼ χ 2 (n − 1)
σ2
σ2
4.6
Distribuição t-Student
A distribuição t de Student foi descoberta por William S. Gosset em 1908. Esta distribuição
surgiu na seguinte situação: Suponha uma amostra X 1 , . . . , X n i.i.d. de uma distribuição normal
com média µ e desvio padrão σ. Seja,
Pn
X=
X
i =1 i
n
e S2 =
2
Pn
Xi − X
i =1
n −1
a média amostral e o desvio padrão amostral, então pode-se provar que
X −µ
Æ 2
S
n −1
tem distribuição t com n-1 graus de liberdade.
Observação 4.3. Quando a amostra é de uma população com distribuição normal, pode-se provar
ainda que X e S 2 são independentes.
A função densidade de probabilidade é dada por
ν +1 ν +1
x2 − 2
1 Γ 2
1+
f (x ) = p
ν
νπ Γ ν
2
para todo x ∈ R. Notação: X ∼ t ν .
4.6.1
Esperança, variância e função geradora de momentos
Se X ∼ t ν então E (X ) = 0 para ν > 1 e
V a r (X ) =
ν
ν −2
para ν > 2. A fgm não existe para esta distribuição.
Se ν = 1 então
f (x ) =
1
π(1 + x 2 )
para todo x ∈ R. Esta distribuição é denominada distribuição de Cauchy. Note que uma variável
aleatória com esta distribuição não possue momentos.
Principais características:
1. A moda, mediana e a média são iguais a 0;
2. A curva é simétrica em torno do 0, isto implica que dado um a ∈ R tem-se que f (−a ) =
f (+a ), logo PX (≤ −a ) = PX (≥ a );
3. quando os graus de liberdade aumentam a distribuição t ν se aproxima da distribuição normal com média zero e variância 1.
Exemplo 4.8. Seja X ∼ t 5 , calcular:
(a)
PX (−2, 57 ≤ X ≤ 2, 57) = P(X ≤ 2, 57) − P(X ≤ −2, 57) = [1 − P(X > 2, 57)] − P(X > 2, 57)
= 1 − 2 × P(X > 2, 57) = 1 − 2 × 0, 025 = 0, 95;
(b) PX (X ≥ x ) = 0, 01 isto implica x = 3, 365.
Referências Bibliográficas
GRAUNT, J. (1662). Natural and Political Observations Mentioned in a Following Index and Made upon the Bills of Mortality. London. Disponível em
<http://www.ac.wwu.edu/ stephan/Graunt/bills.html>. Acesso em: 5 de novembro de
2007.
FUNDAÇÃO INSTITUTO BRASILEIRO DE GEOGRAFIA E ESTATÍSTICA (IBGE). Normas de apresentação tabular. 3. ed. Rio de janeiro, 1993. 63p.
KOLMOGOROV, A. N. Foundations of the Theory of Probability. 2.
New
York:
Chelsea
Publishing
Company,
1956.
84p.
Disponível
<http://www.kolmogorov.com/Foundations.html>. Acesso em: 5 de novembro de 2007.
77
ed.,
em