UNIVERSIDADE DA BEIRA INTERIOR
Departamento de Matemática
Álgebra Linear e Geometria Analítica
Livro do Professor Reginaldo Santos,
adaptado pelo Professor Rogério Serôdio para os cursos na UBI
1o Semestre Ano Lectivo 2007/2008
Cursos: Química Industrial ⊕ Optometria - Ciências da Visão ⊕ Matemática
Conteúdo
1 Matrizes e Sistemas Lineares
1.1 Matrizes . . . . . . . . . . . . . . . . . . .
1.1.1 Operações com Matrizes . . . . . .
1.1.2 Propriedades da Álgebra Matricial
1.2 Sistemas de Equações Lineares . . . . . .
1.2.1 Método de Gauss-Jordan . . . . .
1.2.2 Matrizes Equivalentes por Linhas .
1.2.3 Sistemas Lineares Homogéneos . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
2
3
11
13
20
21
2 Inversão de Matrizes e Determinantes
2.1 Matriz Inversa . . . . . . . . . . . . . . .
2.1.1 Propriedades da Inversa . . . . . .
2.1.2 Método para Inversão de Matrizes
2.2 Determinantes . . . . . . . . . . . . . . .
2.2.1 Propriedades do Determinante . .
2.2.2 Matriz Adjunta e Inversão . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
29
29
31
38
43
45
3 Espaços R2 e R3
3.1 Vectores no Plano e no Espaço . . . . . . . . . . . . . . .
3.1.1 Soma de Vectores e Multiplicação por um Escalar
3.1.2 Norma e Produto Escalar . . . . . . . . . . . . . .
3.1.3 Produto Vectorial . . . . . . . . . . . . . . . . . .
3.1.4 Produto Misto . . . . . . . . . . . . . . . . . . . .
3.2 Equações de Rectas e Planos . . . . . . . . . . . . . . . .
3.2.1 Equação do Plano . . . . . . . . . . . . . . . . . .
3.2.2 Equação da Recta . . . . . . . . . . . . . . . . . .
3.3 Ângulos e Distâncias . . . . . . . . . . . . . . . . . . . . .
3.3.1 Ângulos . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Distâncias . . . . . . . . . . . . . . . . . . . . . . .
3.4 Posições Relativas de Rectas e Planos . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
52
52
52
58
62
66
71
71
74
79
79
82
88
4 Espaços e Subespaços Rn
4.1 Os Espaços Rn . . . . . . . . . . . .
4.1.1 Combinação Linear . . . . . .
4.1.2 Independência Linear . . . .
4.2 Subespaço, Base e Dimensão . . . .
4.3 Espaço Linha e Espaço Coluna . . .
4.3.1 Característica e Nulidade . .
4.3.2 Aplicação a Sistemas Lineares
4.3.3 A Imagem de uma Matriz . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
93
93
94
95
99
108
109
110
111
5 Transformações Lineares
5.1 Definição, Exemplos e Propriedades . . . . .
5.1.1 Definição e Exemplos . . . . . . . . .
5.1.2 Propriedades . . . . . . . . . . . . . .
5.2 A Imagem e o Núcleo . . . . . . . . . . . . .
5.2.1 Injectividade e Sobrejectividade . . . .
5.3 Composição de Transformações Lineares . . .
5.3.1 Matriz de uma Transformação Linear
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
114
114
114
115
118
120
123
123
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ii
Conteúdo
iii
5.3.2
5.3.3
Invertibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Semelhança . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
6 Diagonalização
6.1 Diagonalização de Matrizes . . . . . . . . .
6.1.1 Motivação . . . . . . . . . . . . . . .
6.1.2 Valores Próprios e Vectores Próprios
6.1.3 Diagonalização . . . . . . . . . . . .
6.2 Diagonalização de Matrizes Simétricas . . .
6.2.1 Motivação . . . . . . . . . . . . . . .
6.2.2 Matrizes Ortogonais . . . . . . . . .
6.3 Aplicação na Identificação de Cónicas . . .
Introdução à Álgebra Linear
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Opto, Qui Ind, Mat
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
129
129
129
130
133
138
138
139
144
2007/2008
Capítulo 1
Matrizes e Sistemas Lineares
1.1
Matrizes
Operando com matrizes estamos utilizando uma forma compacta de fazermos operações com vários números
simultaneamente. Vamos definir operações matriciais análogas às operações com números e provar as propriedades
que são válidas para essas operações. Depois disto, o estudo envolvendo operações com vários números pode ser
simplificado fazendo operações com as matrizes e usando as propriedades que já foram demonstradas. Por exemplo,
veremos que um sistema de várias equações lineares pode ser escrito em termos de uma única equação matricial.
Definição 1.1 Uma matriz A, m × n (lê-se m por
colunas
a11
a21
A=
..
.
am1
A i-ésima linha e A é
h
ai1
n), é uma tabela de mn números dispostos em m linhas e n
···
···
a12
a22
..
.
am2
···
···
ai2
para i = 1, . . . , m e a j-ésima coluna de A é
a1n
a2n
..
.
amn
a1j
a2j
A=
..
.
amj
ain
i
.
,
,
para j = 1, . . . , n. Usamos também a notação A = (aij )m×n . Dizemos que aij ou [A]ij é o elemento ou a entrada
de posição i, j da matriz A.
Se m = n, dizemos que A é uma matriz quadrada de ordem n e os elementos a11 , a22 , . . . , ann formam a
chamada diagonal (principal) de A.
Exemplo 1.1 Considere as seguintes matrizes:
"
#
"
1 2
−2
A=
, B=
3 4
0
D=
h
1
3
−2
i
,
#
1
,
3
C=
1
E = 4 ,
−3
"
1
2
F =
3
4
h
0
−2
3
i
#
,
.
As matrizes A e B são 2 × 2. A matriz C é 2 × 3, D é 1 × 3, E é 3 × 1 e F é 1 × 1. De acordo com a notação
que introduzimos, exemplos de elementos de algumas das matrizes dadas acima são a12 = 2, c23 = −2, e21 = 4,
[A]22 = 4 e [D]12 = 3.
Duas matrizes são consideradas iguais se elas têm o mesmo tamanho e os elementos homólogos são iguais ou
seja, A = (aij )m×n e B = (bij )p×q são iguais se m = p, n = q e aij = bij para i = 1, . . . , m e j = 1, . . . , n.
Vamos agora introduzir as operações matriciais.
1
2
Capítulo 1. Matrizes e Sistemas Lineares
1.1.1
Operações com Matrizes
Definição 1.2 A soma de duas matrizes de mesmo tamanho, A = (aij )m×n e B = (bij )m×n , é definida como
sendo a matriz
A + B = C = (cij )m×n ,
obtida somando-se os elementos homólogos de A e B, ou seja,
cij = aij + bij ,
para i = 1, . . . , m e j = 1, . . . , n. Escrevemos também [A + B]ij = aij + bij .
Exemplo 1.2 Considere as matrizes:
"
A=
1
3
2
4
−3
0
#
,
B=
"
−2
0
1
3
5
−4
Se chamamos de C a soma das duas matrizes A e B, então
"
# "
1 + (−2) 2 + 1
−3 + 5
−1
C = A+B =
=
3+0
4 + 3 0 + (−4)
3
#
.
3
7
2
−4
#
.
Definição 1.3 A multiplicação de uma matriz A = (aij )m×n por um escalar (número) α é definida pela
matriz
αA = B = (bij )m×n ,
obtida multiplicando-se cada elemento da matriz A pelo escalar α, ou seja,
bij = αaij ,
para i = 1, . . . , m e j = 1, . . . , n. Escrevemos também [αA]ij = αaij . Dizemos que a matriz B é um múltiplo
escalar da matriz A.
−2
1
Exemplo 1.3 O produto da matriz A = 0
3 pelo escalar −3 é dado por
5 −4
(−3)(−2)
(−3) 1
6 −3
−3A = (−3) 0
(−3) 3 =
0 −9 .
(−3) 5
(−3)(−4)
−15
12
Definição 1.4 O produto de duas matrizes, tais que o número de colunas da primeira é igual ao número
de linhas da segunda, A = (aij )m×p e B = (bij )p×n é definido pela matriz
AB = C = (cij )m×n ,
obtida da seguinte forma:
cij
=
=
(1.1.1)
ai1 b1j + ai2 b2j + · · · + aip bpj
p
X
(1.1.2)
aik bkj ,
k=1
para i = 1, . . . , m e j = 1, . . . , n. Escrevemos também [AB]ij =
p
P
aik bkj .
k=1
A equação (1.1.1) diz que o elemento i, j do produto é igual à soma dos produtos dos elementos da i-ésima linha
de A pelos elementos correspondentes da j-ésima coluna de B.
a11
.
..
ai1
..
.
am1
a12
.
..
ai2
..
.
am2
···
···
···
a1p
.
..
aip
..
.
amp
b11
b21
.
.
.
bp1
···
···
···
b1j
b2j
..
.
bpj
···
···
···
b1n
b2n
..
.
bpn
c11
.
= .
.
cm1
···
cij
···
c1n
..
. .
cmn
Na equação (1.1.2) usamos a notação de somatório para escrever a equação (1.1.1) de forma compacta. O
p
P
significa que fazemos uma soma em que o índice k varia de k = 1 até k = p.
símbolo
k=1
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
3
Capítulo 1. Matrizes e Sistemas Lineares
Exemplo 1.4 Considere as matrizes:
A=
"
1
3
−3
0
2
4
#
−2
B= 0
5
,
0
0 .
0
1
3
−4
Se chamamos de C o produto das duas matrizes A e B, então
"
1(−2) + 2 · 0 + (−3)5 1 · +2 · 3 + (−3)(−4)
C = AB =
3(−2) + 4 · 0 + 0 · 5
3 · 1 + 4 · 3 + 0(−4)
0
0
#
=
"
−17
−6
19
15
0
0
#
.
Observação 1.1 No exemplo anterior o produto BA não está definido (Por quê?). Entretanto, mesmo quando ele
está definido, BA pode não ser igual a AB, ou seja, o produto de matrizes não é comutativo, como mostra o
exemplo seguinte.
Exemplo 1.5 Sejam A =
"
1
3
2
4
#
eB=
AB =
"
"
−2
0
−2
−6
7
15
#
1
. Então,
3
#
"
e
1
9
BA =
0
12
#
.
Definição 1.5 A transposta de uma matriz A = (aij )m×n é definida pela matriz
AT = B = (bij )n×m ,
obtida trocando-se as linhas com as colunas, ou seja,
bij = aji ,
para i = 1, . . . , n e j = 1, . . . , m. Escrevemos também AT ij = aji .
Exemplo 1.6 As transpostas das matrizes
"
#
1 2
A=
,
3 4
são
A
T
=
"
1
2
3
4
#
,
B=
B
T
"
−2
0
=
"
1
3
−2
1
#
0
3
,
C=
#
,
C
"
T
1
2
3
4
1
= 3
0
0
−2
#
,
2
4 .
−2
A seguir, mostraremos as propriedades que são válidas para a álgebra matricial. Várias propriedades são semelhantes àquelas que são válidas para os números reais, mas deve-se tomar cuidado com as diferenças. Uma propriedade
importante que é válida para os números reais, mas não é válida para as matrizes é a comutatividade do produto,
como foi mostrado no Exemplo 1.6. Por ser compacta, usaremos a notação de somatório na demonstração de várias
propriedades. Algumas propriedades desta notação estão explicadas no Apêndice I na página 10.
1.1.2
Propriedades da Álgebra Matricial
Teorema 1.1 Sejam A, B e C matrizes com tamanhos apropriados, α e β escalares. São válidas as seguintes
propriedades para as operações matriciais:
(a) (comutatividade da soma) A + B = B + A;
(b) (associatividade da soma) A + (B + C) = (A + B) + C;
(c) (elemento neutro da soma) Existe uma única matriz 0, m × n, tal que
A + 0 = A,
para toda a matriz A, m × n. A matriz 0 é chamada matriz nula m × n.
(d) (elemento simétrico) Para cada matriz A, existe uma única matriz B, tal que
A + B = 0.
Representamos B por −A.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
4
Capítulo 1. Matrizes e Sistemas Lineares
(e) (associatividade) α(βA) = (αβ)A;
(f ) (distributividade) (α + β)A = αA + βA;
(g) (distributividade) α(A + B) = αA + αB;
(h) (associatividade do produto) A(BC) = (AB)C;
(i) (distributividade) A(B + C) = AB + AC e (A + B)C = AC + BC;
(j) α(AB) = (αA)B = A(αB);
T
AT
= A;
(k)
(l) (A + B)T = AT + B T ;
(m) (AB)T = B T AT ;
(n) (αA)T = αAT ;
(o) A matriz, n × n,
chamada matriz identidade é tal que
In =
1
0
..
.
0
0
1
..
.
0
···
···
..
.
0
0
..
.
1
···
,
AIn = A,
para toda matrizA = (aij )m×n
In B = B,
para toda matrizB = (bij )n×m .
e
Demonstração:
Para provar a igualdades acima, devemos mostrar que os elementos da matriz do lado esquerdo são iguais aos
elementos correspondentes da matriz do lado direito. Serão usadas várias propriedades dos números sem citá-las
explicitamente.
(a) [A + B]ij = aij + bij = bij + aij = [B + A]ij .
(b) [A + (B + C)]ij = aij + [B + C]ij = aij + (bij + cij ) = (aij + bij ) + cij = [A + B]ij + cij = [(A + B) + C]ij .
(c) Seja X uma matriz m × n tal que
A+X
=
(1.1.3)
A
para qualquer matriz A, m × n. Comparando os elementos homólogos, temos que
aij + xij = aij ,
ou seja, xij = 0, para i = 1, . . . , m e j = 1, . . . , n. Portanto, a única matriz que satisfaz (1.1.3) é a matriz em
que todos os seus elementos são iguais a zero. Denotamos a matriz por 0.
(d) Dada uma matriz A, m × n, seja X uma matriz m × n, tal que
A+X
=
(1.1.4)
0.
Comparando os elementos homólogos, temos que
aij + xij = 0,
ou seja, xij = −aij , para i = 1, . . . , m e j = 1, . . . , n. Portanto, a única matriz que satisfaz (1.1.4) é a matriz
em que todos os seus elementos são iguais aos simétricos dos elementos de A. Denotamos a matriz X por −A.
(e) [α(βA)]ij = α [βA]ij = (αβ) [A]ij = [(αβ)A]ij .
(f) [(α + β)A]ij = (α + β)aij = αaij + βaij = [αA]ij + [βA]ij = [αA + βA]ij .
[α(A + B)]ij = α [A + B]ij = α(aij + bij ) = αaij + αbij = [αA]ij + [αB]ij
(g)
=
[αA + αB]ij .
(h) Sejam A, B e C matrizes m × p, p × q e q × n, respectivamente. A notação de somatório aqui pode ser muito
útil, pelo facto de ser compacta.
[A(BC)]ij
=
=
=
p
X
aik [BC]kj =
k=1
p X
q
X
p
X
aik
k=1
(aik bkℓ )cℓj =
k=1 ℓ=1
q
X
q
X
q
X
ℓ=1
p
X
bkℓ cℓj =
p X
q
X
aik (bkℓ cℓj ) =
k=1 ℓ=1
q
X
(aik bkℓ )cℓj =
ℓ=1 k=1
ℓ=1
p
X
k=1
!
aik bkℓ )
cℓj =
[AB]iℓ cℓj = [(AB)C]ij .
ℓ=1
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
5
Capítulo 1. Matrizes e Sistemas Lineares
[A(B + C)]ij
(i)
p
X
=
k=1
p
X
=
aik [B + C]kj =
p
X
k=1
aik bkj +
k=1
p
X
p
X
aik (bkj + ckj ) =
(aik bkj + aik ckj ) =
k=1
aik ckj = [AB]ij + [AC]ij = [AB + AC]ij .
k=1
A outra igualdade é inteiramente análoga à anterior e deixamos como exercício.
p
p
P
P
(j) [α(AB)]ij = α
aik bkj =
(αaik )bkj = [(αA)B]ij e
[α(AB)]ij = α
(k)
(l)
(m)
(n)
(AT )T
(A +
(αA)T
aik bkj =
k=1
k=1
p
P
k=1
aik (αbkj ) = [A(αB)]ij .
= AT ji = aij = [A]ij .
ij
B)T
(AB)T
k=1
p
P
ij
ij
ij
= [A + B]ji = aji + bji = AT ij + B T ij .
= [AB]ji =
p
P
ajk bki =
k=1
p P
AT
k=1
kj
BT
= [αA]ji = αaji = α AT ij = αAT ij .
=
ik
p P
BT
k=1
ik
AT
kj
= B T AT ij .
(o) É imediato.
A diferença entre duas matrizes de mesmo tamanho A e B é definida por
A − B = A + (−B),
ou seja, é a soma da matriz A com a simétrica da matriz B.
Sejam A uma matriz n × n e p um número inteiro positivo. Definimos a potência p de A, por Ap = A . . . A. E
| {z }
p vezes
para p = 0, definimos A0 = In .
Exemplo 1.7 Vamos verificar se para matrizes A e B, quadradas, vale a igualdade
(A + B)(A − B) = A2 − B 2 .
(1.1.5)
Usando a propriedade (i) do teorema anterior obtemos
(A + B)(A − B)
=
(A + B)A + (A + B)(−B)
=
AA + BA − AB − BB = A2 + BA − AB − B 2 .
Assim, (A + B)(A − B) = A2 − B 2 se, e somente se, BA − AB = 0, ou seja, se, e somente se, AB = BA.
Como o produto de matrizes não é comutativo, a conclusão é que a igualdade (1.1.5), não vale para matrizes em
geral. Como contra exemplo basta tomarmos duas matrizes que não comutem entre si. Sejam
"
#
"
#
0 0
1 0
A=
e
B=
.
1 1
1 0
Para esta matrizes
A+B =
"
1
2
0
1
#
, A−B =
"
−1
0
Assim,
(A + B)(A − B) =
"
0
1
#
2
, A =A=
−1
−2
0
1
#
6=
"
"
−1
0
0
1
0
1
0
1
#
#
"
2
, B =B=
1
1
0
o
#
.
= A2 − B 2 .
Exercícios Numéricos
1.1.1 Considere as seguintes matrizes
"
2
A=
6
0
7
#
Se for possível calcule:
,
B=
−6
D= 1
−6
4
1
0
"
0
2
4
−8
0
4 ,
6
#
,
C=
6
E = −1
−6
"
−6
7
9
0
0
9 −7
−3 −2
−9
−4 .
−1
#
,
(a) AB − BA,
(b) 2C − D,
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
6
Capítulo 1. Matrizes e Sistemas Lineares
(c) (2D T − 3E T )T ,
(d) D 2 − DE.
1.1.2 Conhecendo-se somente os produtos AB e AC, como podemos calcular A(B + C), B T AT , C T AT e (ABA)C?
1.1.3 Considere as seguintes matrizes
A=
"
−3
1
Verifique que:
d1
D= 0
0
2
2
0
d2
0
2 −1
−2 1
, B= 2
0 , C =
0 1
0
3
−1 0
0
1
0
0 , E1 = 0 , E2 = 1 , E3 =
d3
0
0
#
1
−1
−1
1 ,
1
0
0 .
1
(a) AB é diferente de BA.
(b) AEj é a j-ésima coluna de A, para j = 1, 2, 3 e EiT B é a i-ésima linha de B, para i = 1, 2, 3 (o caso geral
está no Exercício 1.1.16 na página 8).
−2
1
−1
(c) CD = [d1 C1 d2 C2 d3 C3 ], em que C1 =
0 , C2 = 1 e C3 =
1 , são as colunas da
−1
0
1
matriz C ( o caso geral está no Exercício 1.1.17 (a) na página 8).
d1 L1
(d) DC = d2 L2 , em que L1 = [−2 1 − 1], L2 = [0 1 1] e L3 = [−1 0 1] são as linhas de C (o caso
d3 L3
geral está no exercício 1.1.17 (b) na página 8).
2
−1
(e) Escrevendo B em termos das suas colunas, B = [B1 B2 ], em que B1 = 2 e B2 =
0 , o produto
0
3
AB pode ser escrito como AB = A [B1 B2 ] = [AB1 AB2 ] ( o caso geral está no exercício 1.1.18 (a) na
página 9).
(f) Escrevendo A em termos
das
# suas
" linhas,# A1 = [−3 2 1] e A2 = [1 2 − 1], o produto AB pode ser
"
A1 B
A1
(o caso geral está no Exercício 1.1.18 na página 9).
B=
escrito como AB =
A2 B
A2
1.1.4 Sejam
A=
"
1
0
−3
4
#
0
−2
e
x
X = y .
z
Verifique que xA1 + yA2 + zA3 = AX, em que Aj é a j-ésima coluna de A, para j = 1, 2, 3 (o caso geral está
no Exercício 1.1.19 na página 9).
1.1.5 Encontre um valor de x tal que AB T = 0, em que
1.1.6 Mostre que as matrizes A =
"
1
y
A = [x 4 − 2]
#
1
y
1
e
B = [2 − 3 5] .
, em que y é um número real não nulo, verificam a equação X 2 = 2X.
1.1.7 Mostre que se A e B são matrizes que comutam com a matriz M =
"
0
−1
1
0
#
, então AB = BA.
1.1.8 (a) Determine todas as matrizes A, 2 × 2, diagonais que comutam com toda a matriz B, 2 × 2, ou seja, tais
que AB = BA, para toda a matriz B, 2 × 2.
(b) Determine todas as matrizes A, 2×2, que comutam com toda a matriz B, 2×2, ou seja, tais que AB = BA,
para toda a matriz B, 2 × 2.
Exercícios usando o Matlabr
Uma vez inicializado o Matlabr , aparecerá na janela de comandos um prompt >> ou EDU>>. O prompt
significa que o Matlabr está esperando um comando. Todo o comando deve ser finalizado teclando-se Enter.
Comandos que foram dados anteriormente podem ser obtidos novamente usando as teclas ↑ e ↓. Enquanto
estiver escrevendo um comando, este pode ser corrigido usando as teclas ←, →, Delete e Backspace. O
Matlabr faz diferença entre letras maiúsculas e minúsculas.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
7
Capítulo 1. Matrizes e Sistemas Lineares
No Matlabr , pode-se obter ajuda sobre qualquer comando ou função. O comando
>> help
(sem o prompt >>) mostra uma listagem de todos os pacotes disponíveis. Ajuda sobre um pacote específico
ou sobre um comando ou função específica por ser obtida com o comando
>> help nome
em que nome pode ser o nome de um pacote ou o nome de um comando ou função.
Além dos comandos e funções pré-definidas, escrevemos um pacote chamado gaal com funções específicas
para a aprendizagem de Geometria Analítica e Álgebra Linear. Este pacote pode ser obtido gratuitamente
através da internet no endereço http://www.mat.ufmg.br/∼regi, assim como um texto com uma introdução
ao Matlabr e instruções de como instalar o pacote gaal. Depois deste pacote ser devidamente instalado, o
comando help gaal no prompt do Matlabr dá informações sobre este pacote.
Vamos descrever aqui alguns comandos que podem ser usados para a manipulação de matrizes. Outros comandos serão introduzidos à medida que forem necessários.
>> syms x y z diz ao Matlabr que as variáveis x y e z são simbólcas.
>> A=[a11,. . .,a1n;a21,. . .,a2n;. . .;am1,. . .,amn] cria uma matriz, m×n, usando os elementos a11,a12,. . .,amn
e armazena numa variável de nome A. Por
" exemplo #
1 2 3
>> A=[1,2,3;4,5,6] cria a matriz A =
;
4 5 6
>> I=eye(n) cria a matriz identidade n × n e a armazena numa variável I;
>> O=zeros(n) cria a matriz nula n × n e a armazena numa variável O;
>> O=zeros(m,n) cria a matriz nula m × n e a armazena numa variável O;
>> A+B é a soma de A e B;
>> A-B é a diferença A menos B;
>> A*B é o produto de A por B;
>> num*A é o produto do escalar num por A;
>> A.’ é a transposta de A;
>> Ab k é a potência A elevado a k;
>> A(:,j) é a coluna j da matriz A;
>> A(i,:) é a linha i da matriz A;
>> diag([d1,. . .,dn]) cria uma matriz diagonal, cujos elementos da diagonal são d1,. . .,dn;
>> A=sym(A) converte a matriz A numa matriz em que os elementos são armazenados no formato simbólico.
A função numeric faz o processo inverso.
>> solve(expr) determina a solução da equação expr=0. Por exemplo, solve(x2 -4) determina as soluções da
equação x2 − 4 = 0.
Comando do pacote GAAL:
>> A=randi(n) cria uma matriz n × n com os elementos inteiros aleatórios entre −5 e 5 e armazena numa
variável de nome A.
>> A=randi(m,n) cria uma matriz m × n com os elementos inteiros aleatórios entre −5 e 5 e armazena numa
variável de nome A.
1.1.9 Use o Matlabr para calcular alguns membros da sequência A, A2 , . . . , Ak , . . ., para
"
#
"
#
1
1 21
1
3
(a) A =
;
(b) A =
.
0 13
0 − 15
A sequência parece estar convergindo para alguma matriz? Se estiver, para qual?
1.1.10 Calcule as potências das matrizes dadas a seguir e encontre experimentalmente (por tentativas!) o menor
inteiro k > 1 tal que (use o comando >> A=sym(A) depois de armazenar a matriz na variável A):
(a) Ak = I3 , em que
(b) Ak = I4 , em que
0
A= 1
0
A=
Introdução à Álgebra Linear
0
−1
0
0
0
0
1
1
0
0
0
1
0 ;
0
0
0
0
1
Opto, Qui Ind, Mat
0
0
1
0
;
2007/2008
8
Capítulo 1. Matrizes e Sistemas Lineares
(c) Ak = 0, em que
A=
0
0
0
0
1
0
0
0
0
1
0
0
0
0
1
0
.
1.1.11 Vamos fazer uma experiência no Matlabr para tentar ter uma ideia do quão comum é encontrar matrizes
cujo produto comuta. No prompt do Matlabr digite a seguinte linha:
>> c=0; for n=1:1000,A=randi(3);B=randi(3);if(A*B==B*A),c=c+1;end,end,c
(não esqueça das vírgulas e dos pontos e vírgulas!). O que esta linha manda o Matlabr fazer é o seguinte:
• Criar m contador c e atribuir a ele o valor zero.
• Atribuir às variáveis A e B, 1000 matrizes 3 × 3 com entradas inteiras e aleatórias entre −5 e 5.
• Se AB=BA, ou seja, A e B comutarem, então o contador c é incrementado de 1.
• No final o valor existente na variável c é escrito.
Qual a conclusão que você tira do valor c escrito?
1.1.12 Faça uma experiência semelhante à anterior, mas para o caso em que cada uma das matrizes é diagonal, isto
é, os elementos que estão fora da diagonal são iguais a zero. Use a seta para cima ↑ para obter novamente a
linha digitada e edite a linha prompt do Matlabr de forma a obter algo semelhante à linha:
>> c=0; for n=1:1000,A=diag(randi(1,3));. . .
Qual a conclusão que você tira do valor obtido na variável c?
1.1.13 Faça uma experiência semelhante à anterior, mas para o caso em que uma das matrizes é diagonal. Use a
seta para cima ↑ para obter novamente a linha digitada e edite a linha no prompt do Matlabr de forma a
obter a seguinte linha:
>> c=0; for n=1:1000,A=diag(randi(1,3));B=randi(3);if(A*B==B*A),c=c+1;A,B,
end,end,c
Aqui são impressas as matrizes A e B quando elas comutarem. Qual é a conclusão que você tira desta experiência?
Qual a probabilidade de um tal par de matrizes comutarem?
1.1.14 Use o Matlabr para resolver os Exercícios Numéricos.
Exercícios Teóricos
1.1.15 Dadas as matrizes A = (aij )2×3 , B = (bij )3×2 , C = (cij )2×2 e D = (dij )2×3 , quais das seguintes operações
são possíveis?
(a)
3A
(e)
B(7A)
(i)
(AB)C
(b)
(7A)B
(f)
C + BA
(j)
A(BC)
(c)
(B + D) + A
(g)
AB + C
(k)
(DB)A
(d)
AT + 4D
(h) C(A + D)
(l)
D T (BA)
h
iT
h
iT
h
iT
1.1.16 Sejam E1 = 1 0 · · · 0
, E2 = 0 1 · · · 0
, . . . , En = 0 0 · · · 1
matrizes n×1.
(a) Mostre que se
A=
a11
a21
..
.
am1
a12
a22
..
.
am2
b11
b21
..
.
bn1
b12
b22
..
.
bn2
...
···
···
então AEj é igual à coluna j da matriz A.
(b) Mostre que se
B=
então EiT B é igual à linha i da matriz B.
1.1.17 Seja
λ1
0
D=
..
.
0
Introdução à Álgebra Linear
0
λ2
..
.
0
a1n
a2n
..
.
amn
...
···
b1m
b2m
..
.
bnm
···
...
···
..
.
···
0
0
..
.
λn
Opto, Qui Ind, Mat
,
,
,
2007/2008
9
Capítulo 1. Matrizes e Sistemas Lineares
uma matriz diagonal n × n, isto é, os elementos
a11
a21
A=
..
.
an1
que estão fora da diagonal são iguais a zero. Seja
a12 . . . a1n
a22 · · · a2n
..
..
.
.
.
an2 · · · ann
(a) Mostre que o produto AD é obtido da matriz A multiplicando-se cada coluna j por λj , ou seja, se
a1j
.
A = [A1 A2 . . . An ], em que Aj =
.. é a coluna j de A, então
anj
AD = [λ1 A1 λ2 A2 . . . λn An ] .
(b) Mostre que o produto DA é obtido da matriz A multiplicando-se cada linha i por λi , ou seja, se A =
A1
A2
. , em que Ai = [ai1 . . . ain ] é a linha i de A, então
.
.
An
λ1 A1
λ2 A2
DA =
..
.
λn An
1.1.18 Sejam A e B matrizes m × p e p × n, respectivamente.
.
(a) Mostre que a j-ésima coluna do produto AB é igual ao produto ABj , em que Bj =
coluna de B, ou seja, se B = [B1 . . . Bn ], então
b1j
.
..
é a j-ésima
bpj
AB = A [B1 . . . Bn ] = [AB1 . . . ABn ] .
(b) Mostre que a i-ésima linha do produto AB é igual ao produto Ai B, em que Ai = [ai1 . . . aip ] é a i-ésima
A1
A2
linha de A, ou seja, se A =
.. , então
.
Am
AB =
A1
A2
..
.
Am
B =
A1 B
A2 B
..
.
Am B
.
x1
n
P
.
..
xj Aj , em que Aj é a
uma matriz n × 1. Prove que AX =
j=1
xn
j-ésima coluna de A. (Sugestão: desenvolva o lado direito e chegue ao lado esquerdo.)
(a) Mostre que se A é uma matriz m × n tal que AX = 0, para toda a matriz X, n × 1, então A = 0.
1.1.20
(Sugestão: use o Exercício 1.1.16 na página 8.)
1.1.19 Sejam A uma matriz m × n e X =
(b) Sejam B e C matrizes m × n tais que BX = CX, para todo X, n × 1. Mostre que B = C. (Sugestão:
use o item anterior.)
1.1.21 Mostre que a matriz identidade In é a única matriz tal AIn = In A = A para qualquer matriz A, n × n.
(Sugestão: seja Jn uma matriz talque AJn = Jn A = A. Mostre que Jn = In .)
1.1.22 Se AB = BA e p é um inteiro positivo, mostre que (AB)p = Ap B p .
1.1.23 Sejam A, B e C matrizes n × n.
(a) (A + B)2 = A2 + 2AB + B 2 ? E se AB = BA? Justifique.
(b) (AB)C = C(AB)? E se AC = CA e BC = CB? Justifique.
(Sugestão: veja o Exemplo 1.7 na página 5.)
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
10
Capítulo 1. Matrizes e Sistemas Lineares
1.1.24 (a) Se A e B são duas matrizes tais que AB = 0, então A = 0 ou B = 0? Justifique.
(b) Se AB = 0, então BA = 0? Justifique.
(c) Se A é uma matriz tal que A2 = 0, então A = 0? Justifique.
1.1.25 Dizemos que uma matriz A, n × n, é simétrica se AT = A e é anti-simétrica se AT = −A.
(a) Mostre que se A é simétrica, então aij = aji , para i, j = 1, . . . , n e que se A é anti- -simétrica, então
aij = −aji , para i, j = 1, . . . , n. Portanto, os elementos da diagonal principal de uma matriz anti-simétrica
são iguais a zero.
(b) Mostre que se A e B são simétricas, então A + B e αA são simétricas, para todo o escalar α.
(c) Mostre que se A e B são simétricas, então AB é simétrica se, e somente se, AB = BA.
(d) Mostre que se A e B são anti-simétricas, então A + B e αA são ant-simétricas, para todo o escalar α.
(e) Mostre que para toda a matriz A, n × n, A + AT é simétrica e A − AT é anti-simétrica.
(f) Mostre que toda a matriz quadrada A pode ser escrita como a soma de uma matriz simétrica e uma
anti-simétrica. (Sugestão: observe o resultado de A + AT com A − AT .)
1.1.26 Para matrizes quadradas A = (aij )n×n definimos o traço de A como sendo a soma dos elementos da diagonal
n
P
(principal) de A, ou seja, tr(A) =
aii .
i=1
(a) Mostre que tr(A + B) = tr(A) + tr(B).
(b) Mostre que tr(αA) = αtr(A).
(c) Mostre que tr(AT ) = tr(A).
(d) Mostre que tr(AB) = tr(BA).
1.1.27 Seja A uma matriz n × n. Mostre que se AT A = 0, então A = 0. (Sugestão: use o traço.) E se a matriz A
for m × n, com m 6= n?
1.1.28 Já vimos que o produto de matrizes não é comutativo. Entretanto, certos conjuntos de matrizes são comutativos. Mostre que:
(a) Se D1 e D2 são matrizes diagonais n × n, então D1 D2 = D2 D1 .
(b) Se A é uma matriz n × n e
B = a0 In + a1 A + a2 A2 + · · · + ak Ak ,
em que a0 , . . . , ak são escalares, então AB = BA.
Apêndice I: Notação de Somatório
São válidas algumas propriedades para a notação de somatório:
(a) O índice do somatório é uma variável “muda” que pode ser substituída por qualquer letra:
n
X
fi =
i=1
n
X
fj .
j=1
(b) A ordem em que começa o somatório pode ser alterada:
n
X
i=1
Pois
n
X
i=1
fi =
n+m
X
fi−m .
i=1+m
fi = f1 + · · · + fn = f(1+m)−m + · · · + f(n+m)−m =
n+m
X
fi−m .
i=1+m
(c) O somatório de uma soma pode ser escrito como uma soma de somatórios:
n
X
i=1
(fi + gi ) =
n
X
i=1
fi +
n
X
gi .
i=1
Pois
n
X
i=1
(fi + gi ) = (f1 + g1 ) + · · · + (fn + gn ) = (f1 + · · · + fn ) + · · · + (g1 + · · · + gn ) =
Aqui foram aplicadas as propriedades associative e comutativa da soma e números.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
n
X
i=1
fi +
n
X
gi .
i=1
2007/2008
11
Capítulo 1. Matrizes e Sistemas Lineares
(d) Se no termo geral do somatório aparece um produto, em que um factor não depende do índice do somatório,
então este factor pode “sair” do somatório:
n
X
fi g k = g k
i=1
Pois
n
X
i=1
n
X
fi .
i=1
fi gk = f1 gk + · · · + fn gk = gk (f1 + · · · + fn ) = gk
n
X
fi .
i=1
Aqui foram aplicadas as propriedades distributiva e comutativa do produto em relação à soma de números.
(e) Num somatório duplo, a ordem dos somatórios pode ser trocada:
n X
m
X
fij =
i=1 j=1
n X
m
X
fij .
i=1 j=1
Pois
n X
m
X
fij
n
X
=
i=1 j=1
i=1
(1.1.6)
(fi1 + · · · + fim )
=
(f11 + · · · + f1m ) + · · · + (fn1 + · · · + fnm )
=
(f11 + · · · + fn1 ) + · · · + (f1m + · · · + fnm )
m
X
=
j=1
(1.1.8)
(1.1.9)
(f1j + · · · + fnj )
n X
m
X
=
(1.1.7)
(1.1.10)
fij .
i=1 j=1
Aqui foram aplicadas as propriedades comutativa e associativa da soma de números.
1.2
Sistemas de Equações Lineares
Muitos problemas em várias áreas da Ciência recaem na solução de sistemas lineares. Vamos ver como a álgebra
matricial pode simplificar o estudo dos sistemas lineares.
Uma equação linear de n variáveis x1 , x2 , . . . , xn é uma equação da forma
a1 x1 + a2 x2 + · · · + an xn = b,
em que a1 , a2 , . . . , an e b são constantes reais.
Um sistema de equações lineares ou simplesmente sistema linear é um
seja, é um conjunto de equações da forma
a11 x1 + a12 x2 + · · · + a1n xn =
a21 x1 + a22 x2 + · · · + a2n xn =
..
.
am1 x1 + am2 x2 + · · · + amn xn =
conjunto de equações lineares, ou
b1
b2
,
bm
em que aij e bk são constantes reais, para i, k = 1, . . . , m e j = 1, . . . , n.
Usando o produto de matrizes que definimos na secção anterior, o sistema linear acima pode ser escrito como
uma equação matricial
AX = B,
em que
b1
x1
b2
x2
, X = . e B = .
A=
.
.
.
.
bm
···
xn
s1
s2
Uma solução de um sistema linear é uma matriz S =
.. tal que as equações
.
a11
a21
.
..
am1
a12
a22
.
..
am2
...
···
a1n
a2n
.
..
amn
.
do sistema são satisfeitas
sn
quando substituímos x1 = s1 , x2 = s2 , . . . , xn = sn . O conjunto de todas as soluções do sistema é chamado conjunto solução ou solução geral do sistema. A matriz A é chamada matriz dos coeficientes do sistema linear
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
12
Capítulo 1. Matrizes e Sistemas Lineares
e a matriz B é chamada matriz dos termos independentes.
Um sistema linear é dito consistente ou possível se tiver pelo menos uma solução. Caso contrário, dizemos
que o sistema é inconsistente ou impossível.
Exemplo 1.8 O sistema linear de duas equações e duas incógnitas
(
x
+ 2y = 1
2x +
y
= 0
pode ser escrito como
"
1
2
2
1
#"
x
y
#
=
"
1
0
#
.
A solução (geral) do sistema acima é x = −1/3 e y = 2/3 (verifique!), ou seja,
1
−
3
.
X =
2
3
Uma forma de resolver um sistema linear é substituir o sistema inicial por outro que tenha o mesmo conjunto
solução do primeiro, mas que seja mais fácil de resolver. O outro sistema é obtido depois de aplicarmos sucessivamente
uma série de operações, que não alteram a solução do sistema, sobre as equações. As operações que são usadas são:
• trocar a posição de duas equações do sistema;
• multiplicar uma equação por um escalar diferente de zero;
• somar a uma equação outra equação multiplicada por um escalar.
Estas operações são chamadas de operações elementares. Quando aplicamos operações elementares sobre
as equações de um sistema linear, somente os coeficientes das incógnitas e os termos independentes são alterados.
Assim, podemos aplicar as operações sobre a matriz de coeficientes ampliada com a coluna dos termos independentes,
que chamamos de matriz ampliada, ou seja, a matriz
b1
a11
a12 . . .
a1n
a21
a22 · · ·
a2n
b2
[A|B] =
..
..
..
.
..
.
.
.
.
am1
am2
···
amn
bm
Definição 1.6 Uma operação elementar sobre linhas de uma matriz é uma das seguintes operações:
(a) trocar a posição de duas linhas;
(b) multiplicar uma linha da matriz por um escalar diferente de zero;
(c) somar a uma linha da matriz um múltiplo escalar de outra linha.
Outra definição importante é a que classifica a relação entre linhas.
Definição 1.7 Dada uma matriz A, m × n, dizemos que o conjunto das suas filas (linhas ou colunas) são linearmente dependentes:
1. se existir pelo menos uma fila nula;
2. se existirem duas filas proporcionais; em particular, se existirem duas iguais;
3. se existir uma fila que seja igual à soma de múltiplos das outras filas.
Caso contrário, dizemos que o conjunto das filas é linearmente independente.
Iremos ver mais adiante que o número máximo de elementos que um conjunto, formado pelas filas de uma matriz,
pode ter para ser linearmente independente, é o mesmo quer as filas sejam linhas ou colunas.
O próximo teorema garante que ao aplicarmos operações elementares às equações de um sistema, o conjunto
solução não é alterado.
Teorema 1.2 Se dois sistemas lineares AX = B e CX = D são tais que a matiz ampliada [C|D] é obtida de [A|B]
aplicando-se uma operação elementar, então os dois sistemas possuem as mesmas soluções.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
13
Capítulo 1. Matrizes e Sistemas Lineares
Demonstração:
A demonstração deste teorema segue de duas observações:
(a) Se X é solução de um sistema, então X também é solução do sistema obtido aplicando-se uma operação elementar
sobre as suas equações. (verifique!)
(b) Se o sistema CX = D é obtido de AX = B aplicando-se uma operação elementar às suas equações (ou equivalentemente às linhas da sua matriz ampliada), então o sistema AX = B também pode ser obtido de CX = D
aplicando-se uma operação elementar às suas equações, pois cada operação elementar possui uma operação
elementar inversa do mesmo tipo que desfaz o que a anterior fez. (verifique!)
Pela observação (b), AX = B e CX = D podem ser obtidos um do outro aplicando-se uma operação elementar
sobre as suas equações. E pela observação (a), os dois possuem as mesmas soluções.
Dois sistemas que possuem o mesmo conjunto solução são chamados sistemas equivalentes. Portanto, segue do
Teorema 1.2 que aplicando-se operações elementares às equações de um sistema linear obtemos sistemas equivalentes.
1.2.1
Método de Gauss-Jordan
O método que vamos usar para resolver sistemas lineares consiste na aplicação de operações elementares às linhas
da matriz ampliada do sistema até que obtenhamos uma matriz numa forma em que o sistema associado a esta matriz
seja de fácil resolução.
Vamos procurar obter uma matriz numa forma em que todas as linhas não nulas possuam como primeiro elemento
não nulo o número 1 (chamado pivot). Além disso, se uma coluna contém um pivot, então todos os seus outros
elementos terão que ser iguais a zero. Vamos ver no exemplo seguinte como conseguimos isso. Neste exemplo,
veremos como a partir de um circuito eléctrico em que conhecemos as fontes e as resistências podemos determinar
as correntes eléctricas.
Exemplo 1.9 Consideremos o seguinte sistema eléctricos.
20Ω
Q
10Ω
b
80 volts
90 volts
10Ω
i1
i3
i2
b
P
15Ω
Para obter o sistema de equações, definimos as três correntes (incógnitas do sistema) conforme representadas
no esquema acima, escolhendo a direcção aleatoriamente; se obtivermos um valor negativo para a corrente, isto
implica que a corrente flui no sentido inverso àquele escolhido. A corrente que entra em cada fonte é a mesma que
sai.
As equações para as correntes resultam das leis de Kirchhoff:
Lei de Kirchhoff para a corrente Em qualquer nó, a soma das correntes que entram é igual à soma das correntes que saem.
Lei de Kirchhoff para a voltagem Em qualquer “loop” fechado, a soma das tensões é igual à força electromotriz.
O nó P dá-nos a primeira equação, o nó Q a segunda, o “loop” da direita a terceira e o “loop” da esquerda a
quarta.
nó P :
i1 −
i2 +
i3 =
0
nó Q :
−i1 +
i2 −
i3 =
0
“loop” direito :
10i2 + 25i3 = 90
“loop” esquerdo : 20i1 + 10i2
= 80
Assim, precisamos resolver o sistema linear
i1 −
−i
+
1
20i1 +
Introdução à Álgebra Linear
i2
i2
10i2
10i2
+
−
+
i3
i3
25i3
Opto, Qui Ind, Mat
=
=
=
=
0
0
90
80
2007/2008
14
Capítulo 1. Matrizes e Sistemas Lineares
cuja matriz ampliada é
1a eliminação
1
−1
0
20
−1
1
10
10
1
−1
25
0
0
0
90
80
.
Vamos procurar para pivot da primeira linha um elemento não nulo da primeira coluna não nula (se for o caso,
podemos usar a troca de linhas para “trazê-lo” para a primeira linha). Como o primeiro elemento da primeira coluna
é igual a 1 ele será o primeiro pivot. Agora, precisamos “anular” os outros elementos da 1a coluna, que é a coluna
do pivot. Para isto, adicionamos à 2a linha uma vez a 1a linha e adicionamos à 4a linha, −20 vezes a 1a .
1 −1
1
0
1a linha + 2a linha −→ 2a linha
0
0
0
0
.
a
a
a
0
−20 × 1 linha + 4 linha −→ 4 linha
10
25 90
0
30 −20 80
2a eliminação
A primeira linha que serviu de linha do pivot manteve-se inalterada. Olhamos para a submatriz obtida eliminandose a 1a linha. Uma vez que todos os elementos da 2a linha são nulos, vamos ter que alterar a ordem das linhas
passando a 2a para a última e fazendo subir as outras duas. Assim obtemos
1 −1
1
0
0
10
25 90
.
0
30 −20 80
0
0
0
0
Escolhemos o elementos da posição 2, 2 para pivot. Agora precisamos “anular” os outros elementos da 2a coluna,
que é a coluna do pivot. Para isso, somamos 10 vezes a 1a linha, à 2a linha e somamos à 3a linha, −3 vezes a 2a
linha.
90
10
0
35
a
a
a
25
2 linha + 10 × 1 linha −→ 1 linha
90
0 10
.
a
a
a
0
−3 × 2 linha + 3 linha −→ 3 linha
0 −95 −190
0
0
0
0
3a eliminação
Olhamos para a submatriz obtida eliminando a 1a e a 2a linha. Escolhemos para pivot um elemento diferente
de zero na 1a coluna não nula desta submatriz. Temos de escolher o elemento de posição 3, 3. Podemos fazer o
pivot igual a 1a , multiplicando a 3a linha por −1/95.
10
0 35 90
0 10 25 90
1
−
× 3a linha −→ 3a linha
.
0
0
1
2
95
0
0
0
0
Agora, precisamos “anular” os outros elementos da 3a coluna, que é a coluna do
1a linha, −35 vezes a 3a linha e somamos à 2a linha, −25 vezes a 3a linha.
10
0
−35 × 3a linha + 1a linha −→ 1a linha
0
−25 × 3a linha + 2a linha −→ 2a linha
0
pivot. Para isto, somamos à
0
10
0
0
0
0
1
0
20
40
2
0
.
Resta-nos apenas “passar” os dois primeiros pivots a 1. Para isso, basta multiplicar as duas primeiras linhas
por 1/10.
1
1 0 0 2
× 1a linha −→ 1a linha
0 1 0 4
10
.
0 0 1 2
1
a
a
× 2 linha −→ 2 linha
0 0 0 0
10
a Esta operação de tornar o pivot igual a 1 é sempre possível. No entanto, quando estamos a fazer as contas à
mão só convém fazê-la quando não implicar o aparecimento de fracções.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
15
Capítulo 1. Matrizes e Sistemas Lineares
Portanto, o sistema inicialmente dado é equivalente ao
i1
i2
i3
que possui a solução geral dada por
sistema
=
=
=
2
4 ,
2
i1
2
X = i2 = 4 .
i3
2
Esta é a resposta ao nosso problema. A solução é única. Observe ainda que os valores das três correntes são
positivos, o que significa que escolhemos “bem” inicialmente o sentido das correntes!
A última matriz que obtivemos no exemplo anterior está na forma que chamamos de escalonada reduzida.
Definição 1.8 Uma matriz A = (aij )m×n está na forma escalonada reduzida quando satisfaz as seguintes
condições:
(a) todas as linhas nulas (formadas inteiramente por zeros) ocorrem abaixo das linhas não nulas;
(b) o primeiro elemento não nulo de cada linha não nula, chamado pivot, é igual a 1;
(c) o pivot da linha i + 1 ocorre à direita do pivot da linha i, para i = 1, . . . , m − 1;
(d) se uma coluna contém um pivot, então todos os seus outros elementos são iguais a zero.
Se uma matriz satisfaz as propriedades (a) e (c), mas não necessariamente (b) e (d), dizemos que ela está na
forma escalonada.
Exemplo 1.10 As matrizes
1 3
0 0
0 0
0
1
0
5
0
−2 , 0
2
0
0
0
1
são escalonadas reduzidas, enquanto que as
2 3 0 1
5
0 0 1 4 −2
0 0 0 1
2
matrizes
0
, 0
0
1
0
0
0
1
0
0
0
1
−3
1
−1 , e 0
5
0
0
1
0
0
0
1
5
0
0
4
1
0
0
0
1
−3
4
−1 , e 0
5
0
0
3
0
3
0
2
são escalonadas, mas não são escalonadas reduzidas.
Este método de resolução de sistemas, que consiste em aplicar operações elementares às linhas da matriz ampliada
até que a matriz do sistema esteja na forma escalonada reduzida, é conhecido como método de Gauss-Jordan.
Exemplo 1.11 Considere o seguinte sistema
x +
A sua matriz ampliada é
1a eliminação
1
0
0
3y
y
−2y
3
1
−2
+
+
−
13
5
−10
13z
5z
10z
Introdução à Álgebra Linear
9
2 .
−8
9
2 .
−8
Como o pivot da 1a linha é igual a 1 e os outros elementos da
fazer na 1a eliminação.
1
3
13
9
1
5
2
0
0 −2 −10 −8
2a eliminação
=
=
=
1a coluna são iguais a zero, não há nada o que
.
Opto, Qui Ind, Mat
2007/2008
16
Capítulo 1. Matrizes e Sistemas Lineares
Olhamos para a submatriz obtida eliminando-se a 1a linha. Escolhemos para pivot um
1a coluna não nula da submatriz. Escolhemos o elemento de posição 2, 2. Como ele é igual
“anular” os outros elementos da coluna do pivot. Para isto somamos à 1a linha, −3 vezes
linha, 2 vezes a 2a .
1 0 −2
−3 × 2a linha + 1a linha −→ 1a linha
5
0 1
a
a
a
2 × 2 linha + 3 linha −→ 3 linha
0 0
0
Portanto, o sistema dado é equivalente ao sistema
−
x
y +
2z
5z
0
=
=
=
elemento não nulo da
a 1, precisamos agora
a 2a e somamos à 3a
3
2 .
−4
3
2 ,
−4
que não possui solução.
Um sistema linear não tem solução se, e somente se, existir uma linha não nula da forma [0 . . . 0 |b′ ], com b′ 6= 0,
na forma escalonada reduzida da sua matriz ampliada.
Exemplo 1.12 Considere o seguinte sistema
5x + 15y
x +
3y
A sua matriz ampliada é
1a eliminação
0
5
1
−
−
0
15
3
3z
10z
z
3
−10
−1
−
+
+
−9
40
5
9w
40w
5w
=
=
=
6
−45 .
−7
6
−45 .
−7
Como temos que “fazer” o pivot igual a 1, escolhemos o elemento de posição 3, 1. Precisamos “colocá-lo” na
primeira linha. Para isto, trocamos a 3a linha com a 1a .
1
3
−1
5
−7
1a linha ←→ 3a linha
40 −45 .
5 15 −10
0
0
3 −9
6
à
Agora precisamos “anular” os outros elementos da 1a coluna, que é a coluna do pivot. Para isto, adicionamos
linha, −5 vezes a 1a .
−7
1 3 −1
5
−5 × 1a linha + 2a linha −→ 2a linha
15 −10 .
0 0 −5
0 0
3 −9
6
2a
2a eliminação
Olhamos para a submatriz obtida eliminando-se a 1a linha. Escolhemos para pivot um elemento diferente de
zero na 1a coluna não nula desta submatriz. Escolhemos o elemento de posição 2, 3. Podemos fazer o pivot igual a
1, multiplicando a 2a linha por −1/5.
1 3 −1
5 −7
1
1 −3
2 .
− × 2a linha −→ 2a linha
0 0
5
0 0
3 −9
6
à
Agora precisamos “anular” os outros elementos da 2a coluna, que é a coluna
linha a 2a e à 4a linha, −3 vezes a 2a .
1
2a linha + 1a linha −→ 1a linha
0
a
a
a
−3 × 2 linha + 3 linha −→ 3 linha
0
do pivot. Para isto, adicionamos
1a
3
0
0
0
1
0
2
−3
0
−7
2 .
0
Esta matriz está na forma escalonada reduzida. Portanto, o sistema dado é equivalente ao sistema seguinte
(
x + 3y
+ 2w = −7
.
z − 3w
=
2
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
17
Capítulo 1. Matrizes e Sistemas Lineares
A matriz deste sistema possui duas colunas sem pivots. As variáveis que não estão associadas a pivots podem
ser consideradas variáveis livres, isto é, podem assumir valores arbitrários. Neste exemplo, as variáveis y e w não
estão associadas a pivots e podem ser consideradas variáveis livres. Sejam y = α e w = β. As variáveis associadas
aos pivots terão os seus valores dependentes das variáveis livres, ou seja, z = 2 + 3β e x = −7 − 3α − 2β. Assim, a
solução geral do sistema é
x
−7 − 3α − 2β
y
α
X=
=
para todos os valores de α e β reais.
z
2 + 3β
w
β
Exemplo 1.13 Consideremos a seguinte equação química
C2 H6 + O2 −→ CO2 + H2 O.
Pretendemos fazer o balanço de massa nesta equação, isto é, encontrar inteiros positivos x1 , x2 , x3 e x4 tais que
x1 C2 H6 + x2 O2 −→ x3 CO2 + x4 H2 O.
Como o número de átomos de cada elemento tem de ser o mesmo nos dois membros da equação, temos:
carbono ( C):
hidrogénio ( H):
oxigénio ( O):
Assim, precisamos resolver o sistema
2x1
6x1
cuja matrix ampliada é
1a eliminação
2x2
2
6
0
2x1 = x3
6x1 = 2x4
2x2 = 2x3 + x4 .
−
x3
−
2x3
0
0
2
−1
0
−2
−
−
0
−2
−1
2x4
x4
=
=
=
0
0 ,
0
0
0 .
0
Escolhemos o elemento de posição 1, 1 para pivot. Agora precisamos “anular”
que é a coluna do pivot. Para isto, adicionamos à 2a linha, −3 vezes a 1a .
2
−3 × 1a linha + 2a linha −→ 2a linha
0
0
os outros elementos da 1a coluna,
0
0
2
−1
3
−2
0
−2
−1
2a eliminação
Olhamos para a submatriz obtida eliminando-se a 1a linha. Escolhemos para
zero na 1a coluna não nula desta submatriz. Escolhemos o elemento de posição
segunda linha. Para isto, trocamos a 3a linha com a 2a .
2 0 −1
2a linha ←→ 3a linha
0 2 −2
0 0
3
0
0 .
0
pivot um elemento diferente de
3, 2. Precisamos “colocá-lo” na
0
−1
−2
0
0 .
0
Como os outros elementos da 3a coluna, que é a coluna do pivot, já estão “zerados”, escolhemos o próximo pivot
o elemento de posição 3, 3.
3a eliminação
Agora precisamos “anular” os outros elementos da 3a coluna, que é a coluna do pivot.
a 3 vezes a 2a linha, 2 vezes a 3a e a 3 vezes a 1a , uma vez a 3a .
6 0 0
2 × 3a linha + 3 × 2a linha −→ 2a linha
0 6 0
a
a
a
3 linha + 3 × 1 linha −→ 1 linha
0 0 3
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
Para isto, adicionamos
−2
−7
−2
0
0 .
0
2007/2008
18
Capítulo 1. Matrizes e Sistemas Lineares
Para passar esta matriz à forma escalonada reduzida, basta multiplicar a
1/3.
1/6 × 1a linha −→ 1a linha
1
1/6 × 2a linha −→ 2a linha
0
3 × 3a linha −→ 3a linha
0
1a e 2a linha por 1/6 e a 3a linha por
0
1
0
0
0
1
− 13
− 76
− 23
0
0 .
0
Esta matriz está na forma escalonada reduzida. Portanto, o sistema dado é equivalente ao sistema seguinte
− 13 x4 = 0
x1
x2
− 76 x4 = 0 .
x3 − 23 x4 = 0
Neste exemplo, a variável x4 não está associada a qualquer pivot e pode ser considerada variável livre. Seja
x4 = α. As variáveis associadas aos pivots terão os seus valores dependentes da variável livre, ou seja, x1 =
1/3α, x2 = 7/6α e x3 = 2/3α. Assim, a solução geral do sistema é
x1
1/3α
x 7/6α
2
X=
=
para todos os valores de α reais.
x3 2/3α
x4
α
Observe que este problema não tem uma solução única. Qual o seu significado?
Em geral, se o sistema linear tiver solução e a forma escalonada reduzida da matriz ampliada possuir colunas
sem pivots, as variáveis que não estão associadas a pivots podem ser consideradas variáveis livres, isto é, podem
assumir valores arbitrários. As variáveis associadas ao pivots terão os seus valores dependentes das variáveis livres.
Resumindo, podemos classificar os sistemas em:
a) sistema possível determinado (SPD), quando o sistema é consistente e admite uma única solução;
b) sistema possível indeterminado (SPI), quando o sistema é consistente, mas admite mais do que uma solução;
c) sistema impossível (SI), quando o sistema é inconsistente.
Observação 1.2 Para se encontrar a solução de um sistema linear não é necessário transformar a matriz ampliada
do sistema na sua forma escalonada reduzida, mas se a matriz está nesta forma, o sistema associado é o mais simples
possível. Um outro método de resolver sistemas lineares consiste em, através da aplicação de operações elementares
à matriz ampliada do sistema, se chegar a uma matriz que é somente escalonada (isto é, uma matriz que satisfaz
as condições (a) e (c), mas não necessariamente (b) e (d) da Definição 1.8). Este método é conhecido como o
Método de Gauss.
Como vimos, os sistemas podem ser consistentes ou inconsistentes. A definição seguinte permitir classificar os
sistemas de uma maneira bastante prática.
Definição 1.9 A característica de uma matriz A é o número máximo de linhas linearmente independentes e
denotaremos por Car(A).
Observação 1.3 Uma maneira alternativa de definir característica de uma matriz é dada pelo número de pivots
quando esta estiver na forma escalonada reduzida.
No teorema seguinte estabelece-se que o número máximo de linhas linearmente independentes é igual ao número
máximo de colunas linearmente independentes.
Teorema 1.3 Dada a A matriz m × n, temos Car(AT ) = Car(A).
Demonstração:
Seja A = (Aij )m×n tal que Car(A) = r. Então, por definição, A tem um conjunto de r linhas linearmente
independentes, L(1) , . . . , L(r) e todas as m linhas, A1 , . . . , Am , podem ser escritas como combinações lineares das
outras
A1 = c11 L(1)
+ c12 L(2)
+ ··· +
c1r L(r)
A2 = c21 L(1)
+ c22 L(2)
+ ··· +
c2r L(r)
..
..
..
..
.
.
.
.
Am = cm1 L(1) + cm2 L(2) + · · · + cmr L(r) .
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
19
Capítulo 1. Matrizes e Sistemas Lineares
Estas são equações matriciais. Cada uma é equivalente a n equações para os correspondentes componentes.
Fazendo L(1) = [ℓ11 · · · ℓ1n ], L(2) = [ℓ21 · · · ℓ2n ], . . ., L(r) = [ℓr1 · · · ℓrn ], obtemos
a1k
a2k
..
.
amk
=
=
=
c11 ℓ1k
c21 ℓ1k
..
.
cm1 ℓ1k
para k = 1, . . . , n. Podemos reescrever.
a1k
c11
a
c21
2k
= ℓ1k
.
..
..
.
amk
cm1
+
+
+
c12 ℓ2k
c22 ℓ2k
..
.
cm2 ℓ2k
+
+
···
···
+
+
+
···
+
c12
c22
+ ℓ2k .
.
.
cm2
c1r ℓrk
c2r ℓrk
..
.
cmr ℓrk ,
c1r
c2r
+ · · · + ℓrk .
.
.
cmr
para k = 1, . . . , n. A matriz do membro esquerdo da equação é a coluna k da matriz A. Portanto, as equações
mostram que cada coluna da matriz A é igual à soma de múltiplos das r colunas da direita. Logo, o número máximo
colunas, da matriz A, linearmente independentes não pode exceder as r.
Agora, o mesmo raciocínio aplica-se à matriz AT . Uma vez que as linhas de AT são as colunas de A, concluímos
também que o número máximo de linhas linearmente independentes de A (que é de r) não pode exceder o número
máximo de colunas linearmente independentes da matriz A. Logo esse número tem de ser igual a r.
Consideremos o sistema de equações AX = B, onde A e B são matrizes m × n e m × 1, respectivamente. Em
termos da característica de uma matriz, podemos dizer:
a) se Car(A) = Car(A|B) = n, então o sistema é do tipo SPD;
b) se Car(A) = Car(A|B) < n, então o sistema é do tipo SPI;
c) se Car(A) < Car(A|B), então o sistema é do tipo SI.
Observação 1.4 Se a matriz A e a ampliada do sistema [A|B] tiverem características diferentes, então o sistema
é inconsistente, ou seja, não existe solução. Se as duas matrizes tiverem a mesma característica, então o sistema
é consistente e demonstra-se que a solução conterá n − Car(A) variáveis livres.
Exemplo 1.14 Considere a seguinte matriz ampliada de um sistema de equações.
−1
1 −1
−x
[A|B] = 1
2 −4x
−4
.
2
0
x
−4 x − 4x + 2
Pretendemos classificar o sistema em função do parâmetro x.
1a eliminação
Escolhemos o elemento de posição 1, 1 para pivot. Agora precisamos “anular” os
que é a coluna do pivot. Assim, adicionamos à 2a linha, −1 vezes a 1a .
1 −1
−1 × 1a linha + 2a linha −→ 2a linha
3
0
0
x
2a eliminação
outros elementos da 1a coluna,
−x
−3x
−4
−1
−3
.
x2 − 4x + 2
Olhamos para a submatriz obtida eliminando-se a 1a linha. Escolhemos para pivot um elemento diferente de
zero na 1a coluna não nula desta submatriz. Escolhemos o elemento de posição 2, 2. Podemos “reduzi-lo” à unidade.
Para isso, multiplicamos a 2a linha por 1/3.
1 −1 −x
−1
1/3 × 2a linha ←→ 2a linha
1 −x
−1
0
.
0
x −4 x2 − 4x + 2
à
Agora precisamos “anular” os outros elementos da 2a coluna, que é a coluna do pivot. Para isto, adicionamos
uma vez a 2a e à 3a linha, −x vezes a 2a .
1 0
−2x
0
2a linha + 1a linha −→ 1a linha
−x
1
0 1
.
−x × 2a linha + 3a linha −→ 3a linha
0 0 x2 − 4 x2 − 3x + 2
1a ,
Embora não esteja ainda na forma escalonada reduzida, já podemos determinar as características:
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
20
Capítulo 1. Matrizes e Sistemas Lineares
• Car(A) =
(
e
• Car(A|B) =
se x = ±2
se x =
6 ±2
2,
3,
(
2,
3,
se x = 2
,
se x =
6 2
porque x2 − 3x + 2 = (x − 2)(x − 1).
Logo, temos a seguinte classificação:
• SPD, se x 6= ±2;
• SPI, se x = 2;
• SI, se x = −2.
O próximo resultado mostra que um sistema linear que tenha mais de uma solução não pode ter um número
finito de soluções.
Teorema 1.4 Sejam A e B matrizes m × n e m × 1, respectivamente. Se o sistema linear AX = B possui duas
soluções distintas X0 6= X1 , então ele tem infinitas soluções.
Demonstração:
Seja
Xλ = (1 − λ)X0 + λX1 ,
para λ ∈ R.
Vamos mostrar que Xλ é solução do sistema AX = B, para qualquer λ ∈ R. Para isto vamos mostrar que
AXλ = B.
Aplicando as propriedades (i) e (j) das operações matriciais (Teorema 1.1 na página 3) obtemos
AXλ = A [(1 − λ)X0 + λX1 ] = A(1 − λ)X0 + AλX1 = (1 − λ)AX0 + λAX1 .
Como X0 e X1 são soluções de AX = B, então AX0 = B e AX1 = B. Portanto
AXλ = (1 − λ)B + λB = [(1 − λ) + λ] B = B,
pela propriedade (f) do Teorema 1.1.
Assim, o sistema AX = B tem infinitas soluções, pois para todo o valor de λ ∈ R, Xλ é solução e Xλ − Xλ′ =
(λ − λ′ )(X1 − X0 ), ou seja, Xλ 6= Xλ′ , para λ 6= λ′ . Observe que para λ = 0, Xλ = X0 , para λ = 1, Xλ = X1 , para
λ = 1/2, Xλ = 12 (X0 + X1 ), para λ = 3, Xλ = −2X0 + 3X1 e para λ = −2, Xλ = 3X0 − 2X1 .
No Exemplo 3.4 na página 58 temos uma interpretação geométrica desta demonstração.
Para resolver sistemas lineares temos vindo a aplicar operações elementares à matriz ampliada do sistema linear.
Isto pode ser feito com quaisquer matrizes.
1.2.2
Matrizes Equivalentes por Linhas
Definição 1.10 Uma matriz A = (aij )m×n é equivalente por linhas a uma matriz B = (bij )m×n , se B pode
ser obtida de A aplicando-se uma sequência de operações elementares sobre as suas linhas.
Exemplo 1.15 Observando os Exemplos 1.9, 1.11 e 1.12, vemos que as matrizes
1 −1
1
1
3
13
0
0
3
−1
1
−1
1
5 , 5 15 −10
, 0
0
10
25
1
3
−1
0 −2 −10
20
10
0
são equivalentes por linhas, respectivamente,
1 0 0
0 1 0
,
0 0 1
0 0 0
−9
40 ,
5
às seguintes matrizes escalonadas reduzidas
1
0
0
0
1
0
−2
5 ,
0
1
0
0
3
0
0
0
1
0
2
−3 .
0
Cuidado: elas são equivalentes por linhas, não são iguais!
A relação “ser equivalente por linhas” satisfaz as seguintes propriedades.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
21
Capítulo 1. Matrizes e Sistemas Lineares
Teorema 1.5 (a) Toda a matriz é equivalente por linhas a ele mesma (reflexividade).
(b) Se A é equivalente por linhas a B, então B é equivalente por linhas a A (simetria).
(c) Se A é equivalente por linhas a B e B é equivalente por linhas a C, então A é equivalente por linhas a C
(transitividade).
Demonstração:
(a) Basta multiplicar qualquer linha da matriz por um escalar igual a 1.
(b) Cada operação elementar e tem uma operação elementar e−1 do mesmo tipo que desfaz o que a anterior fez
(verifique!). Se aplicarmos as operações e1 , . . . , ek na matriz A chegamos à matriz B. Então, aplicando-se as
−1
operações inversas e−1
à matriz B, chegamos à matriz A.
k , . . . , e1
(c) Se aplicarmos as operações elementares e1 , . . . , ek chegamos de A a B e aplicando-se as operações elementares
ek+1 , . . . , eℓ chegamos de B a C. Então, aplicando-se as operações e1 , . . . , eℓ chegamos de A a C.
Em geral, qualquer matriz A é equivalente por linhas a uma matriz na forma escalonada reduzida e a demonstração, que omitiremos, pode ser feita da mesma maneira que fizemos no caso particular das matrizes ampliadas
dos Exemplos 1.9, 1.11 e 1.12. No Teorema 4.11 na página 107 mostramos que essa matriz escalonada reduzida é a
única matriz na forma escalonada reduzida equivalente a A.
O próximo resultado será usado para provar alguns resultados no capítulo de inversão de matrizes.
Teorema 1.6 Seja R uma matriz n × n, na forma escalonada reduzida. Se R 6= In , então R tem uma linha nula.
Demonstração:
Observe que o pivot de uma linha i está sempre numa coluna j com j ≥ i. Portanto, ou a última linha de R é
nula ou o pivot da linha n está na posição n, n. Mas neste caso, todas as linhas anteriores são não nulas e os pivots
de cada linha i está na coluna i. Ou seja, R = In .
1.2.3
Sistemas Lineares Homogéneos
Um sistema linear da forma
a11 x1
a21 x1
+
+
am1 x1
+
a12 x2
a22 x2
am2 x2
+
+
+
···
···
+
+
···
+
a1n xn
a2n xn
amn xn
=
=
..
.
=
0
0
,
(1.2.11)
0
é chamado sistema homogéneo. O sistema (1.2.11) pode ser escrito como AX = 0. Todo o sistema homogéneo
x1
0
x2 0
admite pelo menos a solução X =
.. = .. , chamada solução trivial.
. .
xn
0
Portanto, todo o sistema homogéneo tem solução. Além disso, pelo Teorema 1.4, ou tem somente a solução
trivial ou tem infinitas soluções.
Observação 1.5 Para resolver um sistema linear homogéneo AX = 0, basta escalonarmos a matriz A do sistema,
já que sob a acção de uma operação elementar a coluna de zeros não é alterada. Mas é preciso ficar atento quando
se escreve o sistema linear associado à matriz resultante das operações elementares, para se levar em consideração
esta coluna de zeros que não escrevemos.
Teorema 1.7 Se A = (aij )m×n é tal que m < n, então o sistema homogéneo AX = 0 tem soluções diferentes da
solução trivial. Ou seja, todo o sistema homogéneo com menos equações do que incógnitas tem infinitas soluções.
Demonstração:
Como o sistema tem menos equações do que incógnitas (m < n), o número de linhas não nulas r da forma
escalonada reduzida da matriz ampliada do sistema também é tal que r < n. Assim, temos r pivots e n − r variáveis
(incógnitas) livres, que podem assumir todos os valores reais. Logo, o sistema admite solução não trivial e portanto
infinitas soluções.
O conjunto solução de um sistema linear homogéneo satisfaz propriedades interessantes. Estas propriedades terão
um papel decisivo no estudo de subespaços de Rn na secção 4.2 na página 99.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
22
Capítulo 1. Matrizes e Sistemas Lineares
Teorema 1.8 Seja A = (aij )m×n .
(a) Se X1 e X2 são soluções do sistema homogéneo AX = 0, então X1 + X2 também o é.
(b) Se X é solução do sistema homogéneo AX = 0, então αX também o é, para α ∈ R.
Demonstração:
(a) Se X1 e X2 são soluções do sistema homogéneo AX = 0, então AX1 = 0 e AX2 = 0. Portanto X1 + X2 também
é solução, pois A(X1 + X2 ) = AX1 + AX2 = 0 + 0 = 0.
(b) Se X é solução do sistema homogéneo AX = 0, então αX também o é, pois A(αX) = αAX = α0 = 0.
Estas propriedades não são válidas para os sistemas lineares em geral. Por exemplo, considere o sistema linear
AX = B, em que A = [1] e B = [1]. A solução deste sistema é X = [1]. Mas, X + X = 2X = [2], não é solução do
sistema.
Exercícios Numéricos
1.2.1 Quais das seguintes matrizes
1 0 0
A= 0 0 1
0 0 0
1
0
C=
0
0
0
0
0
0
0
1
0
0
estão na forma escalonada reduzida:
0
3
0 −4
1
2
0
0
1
0
3
0
2
0
0
B= 0
0
1
0
0
0
1
0
0
0
−1
0
0
D=
0
0
0
0
0
0
0
1
0
0
0
2
1
0
1.2.2 Em cada item suponha que a matriz ampliada de um sistema foi transformada
dada, usando operações elementares. Resolva o sistema correspondente.
1 0
8
1 0 0 −7
(c) 0 1
(a) 0 1 0
3
2
0 0 1
1 −5
0 0
(b)
1
0
0
0
−6
0
0
0
0
1
0
0
0
0
1
0
3
4
5
0
−2
7
8
0
(d)
1.2.3 Resolva, usando o método de Gauss-Jordan, os seguintes sistemas:
x1 +
x2 + 2x3 =
8
(a)
−x1 − 2x2 + 3x3 =
1
3x1 − 7x2 + 4x3 = 10
2x1 + 2x2 + 2x3 =
0
(b)
−2x1 + 5x2 + 2x3 =
1
8x1 +
x2 + 4x3 = −1
− 2x2 + 3x3 =
1
(c)
3x1 + 6x2 − 3x3 = −2
6x1 + 6x2 + 3x3 =
5
1.2.4 Os sistemas
Observe que
(a)
1
0
0
0
7
0
0
0
−4
5
2
0
−4
0
0
na matriz escalonada reduzida
0
0
1
0
0
1
6
3
2
0
1
0
0
0
0
1
0
−8
6
3
0
−3
5
9
0
lineares seguintes possuem a mesma matriz A. Resolva-os usando o método de Gauss-Jordan.
os dois sistemas podem ser resolvidos ao mesmo tempo escalonando a matriz ampliada [A|B1 |B2 ].
x1 − 2x2 +
x3 =
1
x3 =
2
x1 − 2x2 +
(b)
2x1 − 5x2 +
x3 = −2
2x1 − 5x2 +
x3 = −1
3x1 − 7x2 + 2x3 = −1
3x1 − 7x2 + 2x3 =
2
1.2.5 Seja
1
A= 1
0
Introdução à Álgebra Linear
0
1
1
5
1 .
−4
Opto, Qui Ind, Mat
2007/2008
23
Capítulo 1. Matrizes e Sistemas Lineares
(a) Encontre a solução geral do sistema (A + 4I3 )X = 0.
(b) Encontre a solução geral do sistema (A − 2I3 )X = 0.
1.2.6 Mostre, através de um exemplo, que Car(A) = Car(B) não implica que Car(A2 ) = Car(B 2 ).
1.2.7 Determine a característica das seguintes matrizes.
(a)
(c)
(e)
1
−7
−6
4
1
2
3
1
−1
3
−1
1
1
1
0
3
−1
8
7
2
2
4
3
1
3
6
1
0
1
−2
(b)
(d)
(f)
2
2
3
2
−3
3
1
2
3
6
1
0
2
3
3
−2
2
4
2
8
0
3
0
−3
1
1
2
−1
−2
3
3
1
7
0
2
3
5
1.2.8 Para cada sistema linear dado, encontre todos os valores de a para os quais o sistema não tem solução, tem
solução única e tem infinitas soluções:
x
3x
4x
x
(b)
2x
2x
(a)
+
−
+
2y
y
y
+
+
+
3z
5z
(a2 − 14)z
+
+
+
y
3y
3y
+
+
+
z
2z
(a2 − 1)z
=
=
=
=
=
=
4
2
a+2
2
5
a+1
1.2.9 Usando as Leis de Kirchhoff, determine as correntes eléctricas dos seguintes circuitos.
i3
R2
(a)
(b)
i2
i2
R1
R2
R1
R3
i1
V1
V
8 volts
(c)
1Ω
i1
(d)
1Ω
i1
V2
i1
i3
4Ω
i3
i2
5Ω
2Ω
i3
3Ω
0.5Ω
2Ω
16 volts
i2
5 volts
10 volts
5Ω
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
24
Capítulo 1. Matrizes e Sistemas Lineares
1.2.10 Considere o seguinte circuito eléctrico (“Ponte” de Wheatstone).
R4
R3
R5
R1
R2
Mostre que se R2 R4 = R1 R3 , então a corrente que “passa” por R5 é nula.
1.2.11 Os métodos de análise de circuitos eléctricos têm aplicações em outros campos. Por exemplo, aplicando o
equivalente às Leis de Kirchhoff, determine o fluxo de tráfego (carros por hora) na rede de estradas de sentido
único (as direcções estão indicadas pelas setas) conforme ilustrado no seguinte esquema. A solução é única?
200
300
400
400
x1
x4
500
x2
600
x3
300
500
1.2.12 Use o procedimento ilustrado no Exemplo 1.13, para fazer o balanço de massa nas seguintes equações químicas:
(a) Na + H2 O −→ NaOH + H2
(b) KClO3 −→ KCl + O2
(c) Fe3 O4 + C −→ Fe + CO
(d) C5 H8 + O2 −→ CO2 + H2 O
(e) Cu + HNO3 −→ Cu(NO3 )2 + H2 O +NO
(f) Ca3 (PO4 )2 + H3 PO4 −→ Ca(H2 PO4 )2
1.2.13 Determine os coeficientes a, b, c e d da função polinomial p(x) = ax3 + bx2 + cx + d, cujo gráfico passa pelos
pontos P1 (0, 10), P2 (1, 7), P3 (3, −11) e P4 (4, −14).
30
y
20
10
0
x
-10
-20
-30
-2
-1
0
1
2
3
4
5
1.2.14 Determine os coeficientes a, b e c da equação do círculo x2 + y 2 + ax + by + c = 0, que passa pelos pontos
P1 (−2, 7), P2 (−4, 5) e P3 (4, −3).
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
25
Capítulo 1. Matrizes e Sistemas Lineares
y
8
6
4
2
0
x
-2
-4
-6
-4
-2
0
2
4
6
8
1.2.15 Determine os coeficientes a, b e c da função polinomial p(x) = ax2 + bx + c, cujo gráfico passa pelos pontos
P1 (1, 1), P2 (2, 2) e P3 (3, 0).
1.2.16 Será possível existir uma função polinomial p(x) = ax2 +bx+c, cujo gráfico passa pelos pontos P1 (0, 1), P2 (1, 3), P3 (2, 15)
e P4 (3, 37)? Justifique.
1.2.17 Encontre condições sobre os
x1 − 2x2
(a)
4x1 − 5x2
−3x1 + 3x2
1.2.18 Resolva, usando
x1 +
x1 +
(a)
x1 +
3x1 +
x1 +
2x
+
1
(b)
2x1 +
bi ’s para que cada um dos sistemas seja consistente (isto é, tenha solução):
+ 5x3 = b1
x1 − 2x2 −
x3 = b1
(b)
+ 8x3 = b2
−4x1 + 5x2 + 2x3 = b2
− 3x3 = b3
−4x1 + 7x2 + 4x3 = b3
o método d Gauss-Jordan, os seguintes sistemas:
2x2
2x2
2x2
6x2
+
x3
+
x3
3x2
6x2
−
+
2x3
5x3
5x3
6x2
−
−
−
−
−
+
+
3x4
3x4
3x4
9x4
+
+
+
+
3x4
2x4
10x4
8x4
x5
x5
2x5
4x5
+
+
+
+
+
2x5
4x5
+
4x5
1
1
1
1
1
3
−2
a
1.2.19 Considere a matriz A =
2 2a − 2 −a − 2 3a − 1
3
a+2
−3
2a + 1
B, em que B = [4 3 1 6]T , para todos os valores de a.
2x6
x6
3x6
−
+
+
=
=
=
=
3x6
15x6
18x6
2
3
4
9
=
=
=
=
. Determine o conjunto solução do sistema AX =
1.2.20 Resolva os sistemas lineares cujas matrizes ampliadas são:
1
(a) 1
1
2
3
0
3
0
2
1
1
1
8
7
3
1
(b) 0
1
1
2
0
3
1
2
0
−1
5
6
−3
−3
−1
0
3
−1
1
1
(c)
1
1
2
1
1
3
3
1
2
3
0
0
0
0
1.2.21 Suponha que 100 insectos estão distribuídos por quatro compartimentos com passagens entre eles, conforme
representado no seguinte esquema.
3
4
2
1
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
26
Capítulo 1. Matrizes e Sistemas Lineares
Ao fim de um minuto, os insectos redistribuem-se por eles próprios. Assuma que um minuto não é tempo
suficiente para que um insecto “visite” mais do que um compartimento e que ao fim de um minuto 40%
dos insectos permanecem no compartimento onde se encontravam no início desse minuto. Os insectos que
abandonam os compartimentos dispersam-se uniformemente pelos compartimentos adjacentes a que têm acesso.
(a) Se ao fim de um minuto existiam 12, 25, 26 e 37 insectos nos compartimentos 1, 2, 3 e 4, respectivamente,
determine a distribuição inicial.
(b) Se a distribuição inicial é de 20, 20, 20 e 40, qual é a distribuição ao fim de um minuto?
1.2.22 Considere o prato quadrado, onde as temperaturas em cada lado estão indicadas.
b
b
P2
200
b
b
b
P3
b
100
100
b
b
b
P1
b
P4
b
b
100
Em certas circunstâncias, prova-se que as temperaturas aproximadas u1 , u2 , u3 e u4 nos pontos P1 , P2 , P3 e
P4 , respectivamente, são dadas por
u1
=
u2
=
u3
=
u4
=
u2 + u4 + 100 + 100
4
200 + u3 + u1 + 100
4
200 + 100 + u4 + u2
4
u3 + 100 + 100 + u1
.
4
(a) Mostre que o sistema acima pode ser escrito na forma
−4
1
0
1
1 −4
1
0
0
1 −4
1
1
0
1 −4
u1
u2
u3
u4
(b) Resolva o sistema usando o método de Gauss-Jordan.
−200
−300
.
=
−300
−200
Exercícios usando o Matlabr
Comandos do Matlabr
>> A=[A1,. . .,An] cria uma matriz A formada pelas matrizes, definidas previamente, A1,. . .,An, colocadas uma
ao lado da outra.
>> expr=subs(expr,x,num) substitui na expressão expr a variável x por num.
>> p=poly2sym([an,. . .,a0]),x armazena na variável p o polinómio an xn + · · · + a0 .
>> rank(A) determina a característica da matriz A.
>> clf limpa a figura activa.
Comandos do pacote GAAL
>> B=opel(alpha,i,A) ou B=oe(alpha,i,A) faz a operação elementar
alpha × linha i ==> linha i da matriz A e armazena a matriz resultante em B.
>> B=opel(alpha,i,j,A) ou B=oe(alpha,i,j,A) faz a operação elementar
alpha × linha i + linha j ==> linha j da matriz A e armazena em B.
>> B=opel(A,i,j) ou B=oe(A,i,j) faz a troca da linha i com a linha j da matriz A e armazena a matriz
resultante em B.
>> B=escalona(A) calcula, passo a passo, a forma escalonada reduzida da matriz A e armazena a matriz
resultante na variável B.
>> matvand(P,k) obtém a matriz de Vandermonde de ordem k se P=[x1;. . .;xn] e a matriz de Vandermonde
generalizada no caso em que P=[x1,y1;. . .;xn,yn].
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
27
Capítulo 1. Matrizes e Sistemas Lineares
>> po([x1,y1;x2,y2;. . .;xk,yk desenha os pontos (x1,y1),. . .,(xk,yk).
>> plotf1(f,[a,b]) desenha o gráfico da função dada pela expressão simbólica f no intervalo [a,b].
>> plotci(f,[a,b],[c,d]) desenha o gráfico da curva dada implicitamente pela expressão f(x,y)=0 na região
do plano [a,b]×[c,d].
>> p=poly2sym2([a,b,c,d,e,f],x,y) armazena na variável p o polinómio em duas variáveis ax2 + bxy + cy 2 +
dx + ey + f .
>> eixos desenha os eixos coordenados.
(a) Use o comando P=randi(4,2) para gerar 4 pontos com entradas inteiras e aleatórias entre −5 e 5. Os
1.2.23
pontos estão armazenados nas linhas da matriz P.
(b) Use o Matlabr para tentar encontrar os coeficientes a, b, c e d da função polinomial p(x) = ax3 + bx2 +
cx + d cujo gráfico passa pelos pontos dados pelas linhas da matriz P. A matriz A=matvand(P(:,1),3)
pode ser útil na solução deste problema, assim como a matriz B=P(:,2). Se não consegui, repita o passo
anterior. Por que pode não ser possível?
(c) Desenhe os pontos e o gráfico do polinómio com os comandos
clf,po(P),syms x,p=poly2sym(R(:,5),x),plotf1(p,[-5,5]), em que R é a forma escalonada reduzida
da matriz [A,B].
(d) Desenhe os eixos coordenados com o comando eixos.
(a) Use o comando P=randi(5,2) para gerar 5 pontos com entradas inteiras e aleatórias entre −5 e 5. Os
1.2.24
pontos estão armazenados nas linhas da matriz P.
(b) Use o Matlabr para tentar encontrar os coeficientes a, b, c, d, e e f da cónica, curva de equação ax2 +
bxy + cy 2 + dx + ey + f = 0, cujo gráfico passa pelos pontos dados pelas linhas da matriz P. A matriz
A=matvand(P,2) pode ser útil na solução deste problema, assim como a matriz B=P(:,2). Se não consegui,
repita o passo anterior. Por que pode não ser possível?
(c) Desenhe os pontos e a cónica com os comandos
clf,po(P),syms x y,p=poly2sym([-R(:,6);1],x,y),plotci(p,[-5,5],[-5,5]), em que R é a forma escalonada reduzida da matriz A.
(d) Desenhe os eixos coordenados com o comando eixos.
1.2.25 Use o Matlabr e resolva os Exercícios Numéricos a partir do Exercício 1.2.3.
Exercícios Teóricos
1.2.26 Suponha que [C|D] é obtida de [A|B] aplicando-se uma operação elementar sobre suas linhas. Mostre que X
é solução do sistema linear AX = B se, e somente se, X também é solução de CX = D.
1.2.27 Mostre que toda a operação elementar possui inversa, do mesmo tipo. Ou seja, para cada operação elementar,
existe uma operação elementar do mesmo tipo que desfaz o que a operação anterior fez.
1.2.28 Mostre que Car(B T AT ) = Car(AB).
1.2.29 Mostre que se a matriz A, m × n, não for quadrada, isto é, m 6= n, então ou as linhas ou as colunas são
linearmente dependentes.
1.2.30 Seja A uma matriz m × n. Mostre que se Car(A) = m, então o sistema cuja matriz ampliada é [A|B] é
consistente qualquer que seja a matriz B m × 1.
1.2.31 Considere dois sistemas de equações consistentes, cujas matrizes ampliadas sejam [A|B] e [A|C]. Mostre que
o sistema de equações [A|B + C] também é consistente.
(a) Sejam X1 e X2 soluções do sistema homogéneo AX = 0. Mostre que αX1 +βX2 é solução, para quaisquer
1.2.32
escalares α e β. (Sugestão: veja o Teorema 1.8.)
(b) Sejam X1 e X2 soluções do sistema AX = B. Mostre que se αX1 + βX2 é solução, para quaisquer
escalares α e β, então B = 0. (Sugestão: faça α = β = 0.)
1.2.33 Sejam A uma matriz m × n e B 6= 0 uma matriz m × 1.
(a) Mostre que se X1 é uma solução do sistema AX = B e Y1 é uma solução do sistema homogéneo associado,
AX = 0, então X1 + Y1 é solução de AX = B.
(b) Seja X0 uma solução particular do sistema AX = B. Mostre que toda a solução X do sistema AX = B
pode ser escrita como X = X0 + Y , em que Y é uma solução do sistema homogéneo associado, AX = 0.
Assim, a solução geral do sistema AX = B é a soma de uma solução particular de AX = B com a solução
geral do sistema homogéneo associado AX = 0. (Sugestão: escreva X = X0 + (X − X0 ) e mostre que
X − X0 é solução do sistema homogéneo AX = 0.)
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
28
Capítulo 1. Matrizes e Sistemas Lineares
Teste do Capítulo
1. Para o sistema linear dado, encontre todos os valores de a para os quais o sistema não tem solução,tem solução
única e tem infinitas soluções:
z = 3
x + 2y +
x +
y −
z = 2
x +
y + (a2 − 5)z = a
2. Se possível, encontre os valores de
1
2
1
3. Sejam
x, y e z tais que:
2 3
−40
16
5 3 13 −5
0 8
5 −2
D=
"
1
0
0
−1
#
e
P =
x
1
y = 0
z
0
"
cos θ
− sin θ
0
1
0
sin θ
cos θ
0
0 .
1
#
.
Sabendo-se que A = P T DP , calcule D 2 , P P T e A2 .
4. Classifique verdadeiro ou falso, justificando:
(a) se A2 = −2A4 , então (In + A2 )(In − 2A2 ) = In ;
(b) se A = P T DP , onde D é uma matriz diagonal, então AT = A;
(c) se D é uma matriz diagonal, então DA = AD. para toda a matriz A, n × n;
(d) se B = AAT , então B = B T .
(e) se A e B são tais que A = AT e B = B T , então C = AB é tal que C T = C.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
Capítulo 2
Inversão de Matrizes e Determinantes
2.1
Matriz Inversa
Todo número real a, não nulo, possui um inverso multiplicativo, ou seja, um número b, tal que ab = ba = 1. Este
número é único e denotamo-lo por a−1 . Apesar da álgebra matricial ser semelhante à álgebra dos números reais, nem
todas as matrizes A não nulas possuem inversa, ou seja, nem sempre existe uma matriz B tal que AB = BA = In .
De início, para que os produtos AB e BA estejam definidos e sejam iguais é preciso que as matrizes A e B sejam
quadradas. Portanto, somente as matrizes quadradas podem ter inversa, o que já diferencia do caso dos números
reais, pois todo número não nulo tem inverso. Mesmo entre as matrizes quadradas, muitas não possuem inversa,
apesar do conjunto das que não tem inversa ser bem menor do que o conjunto das que tem (Exercício 2.2.13 na
página 49).
Definição 2.1 Uma matriz quadrada A = (aij )n×n é invertível ou não singular, se existe uma matriz B =
(bij )n×n tal que
(2.1.1)
AB = BA = In ,
em que In é a matriz identidade. Dizemos que a matriz B é a inversa de A. Se A não tem inversa, dizemos que
A é singular ou não invertível.
Exemplo 2.1 Considere as matrizes
A=
"
−2
0
1
3
#
e
B=
"
−1/2
0
1/6
1/3
#
.
Podemos ver que a matriz B é a inversa da matriz A, pois AB = BA = I2 (Verifique!).
Teorema 2.1 Se uma matriz A = (aij )n×n possui inversa, então a inversa é única.
Demonstração:
Suponhamos que B e C sejam inversas de A. Então AB = BA = In = AC = CA. Assim,
B = BIn = B(AC) = (BA)C = In C = C.
Denotamos a inversa de A, quando ela existe, por A−1 . Devemos chamar atenção para o facto de que o índice
superior −1, aqui, não significa uma potência, tão pouco uma divisão. Assim, como no caso da transposta em que
AT significa a transposta de A, aqui, A−1 significa a inversa de A.
2.1.1
Propriedades da Inversa
Teorema 2.2 (a) Se A é invertível, então A−1 também o é
−1
A−1
= A;
29
30
Capítulo 2. Inversão de Matrizes e Determinantes
(b) Se A = (aij )n×n e B = (bij )n×n são matrizes invertíveis, então AB é invertível e
(AB)−1 = B −1 A−1 ;
(c) Se A = (aij )n×n é invertível, então AT também é invertível e
−1
T
AT
= A−1 .
Demonstração:
Se queremos mostrar que uma matriz e a inversa de uma outra, temos que demonstrar que os produtos das duas
matrizes são iguais à matriz identidade.
(a) Uma matriz B é a inversa de A−1 se
A−1 B = In .
Multiplicando à esquerda, nesta equação, por A, obtemos
AA−1 B = AIn .
Como AA−1 = In e AIn = A, temos
B = A.
Logo
A−1
B −1 A−1 ,
−1
= A.
(b) Temos que provar que a inversa de AB é
ou seja, temos que mostrar que os produtos (AB)(B −1 A−1 )
−1
−1
e (B A )(AB) são iguais à matriz identidade. Mas,
(AB)(B −1 A−1 ) = A(BB −1 )A−1 = AIn A−1 = AA−1 = In ,
(B −1 A−1 )(AB) = B −1 (A−1 A)B = B −1 In B = B −1 B = In .
(c) Queremos mostrar que a inversa de AT é (A−1 )T . Assim,
T
= In ,
AT (A−1 )T = (A−1 A)T = In
T
= In .
(A−1 )T AT = (AA−1 )T = In
Uma vez que nem todas as matrizes quadradas possuem inversa, no teorema seguinte estabelece- -se condições
para a existência de inversa.
Teorema 2.3 Seja A uma matriz n × n. As seguintes afirmações são equivalentes.
(a) Existe A−1 , ou seja, A é não singular.
(b) Car(A) = n.
(c) A escalonada reduzida de A é a matriz identidade In .
(d) O sistema de equações AX = 0 implica que X = 0.
Demonstração:
(a) =⇒ (b) Vamos supor que existe a inversa A−1 . Consideremos o seguinte sistema de equações lineares AX = B,
onde B é uma matriz n × 1. Multiplicando nesta equação à esquerda por A−1 , temos
A−1 AX
=
A−1 B
In X
=
A−1 B
X
=
A−1 B.
Ou seja, o sistema tem solução e é única. Logo Car(A) = n.
(b) =⇒ (c) Vamos supor que Car(A) = n. Isto significa que a escalonada reduzida da matriz A tem n pivots iguais
a 1. Como a matriz A é n × n, concluímos que a matriz escalonada reduzida da matriz A é a matriz identidade.
(c) =⇒ (d) Vamos supor que a escalonada reduzida da matriz A é a matriz identidade. Consideremos o sistema
homogéneo AX = 0. Então
[A|0]
Gauss-Jordan
[I|0].
Logo X = 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
31
Capítulo 2. Inversão de Matrizes e Determinantes
(d) =⇒ (a) Vamos supor que AX = 0 implica X = 0. Então, como o sistema é determinado admite uma única
solução, concluímos que Car(A) = n. Ou seja, a equação AX = In tem uma única solução. Agora basta
provar que XA = In para garantir que existe a inversa de A.
Assim, multiplicando A, à direita, por XA − In , temos
.
A(XA − In ) = AXA − A = In A − A = 0.
Isto implica, por hipótese, que XA − In = 0, ou seja, XA = In
O teorema seguinte garante que basta verificarmos uma das igualdades em (2.1.1) para sabermos se uma matriz
é a inversa de outra.
Teorema 2.4 Sejam A e B matrizes n × n. Se AB = In , então BA = In .
Demonstração:
O facto de AB = I implica que B é não singular. Caso contrário, se B é singular, então, pela alínea (d) do
teorema anterior, existe X 6= 0 tal que BX = 0, o que contradiz o facto de
X = In X = ABX = 0.
Como
B −1
existe, podemos escrever
AB = In
=⇒ ABB −1 = B −1
=⇒ A = B −1
=⇒ BA = In .
Assim, para verificar que uma matriz A é invertível, quando temos uma matriz B que é candidata a inversa de
A basta fazer um dos produtos AB ou BA e verificar se um deles é igual a In . O próximo exemplo ilustra este facto.
Exemplo 2.2 Seja A = (aij )n×n uma matriz tal que A3 = 0 (A pode não ser a matriz nula!). Vamos mostrar
que a inversa de In − A é In + A + A2 . Para provar isto, devemos multiplicar a matriz In − A pela matriz que
possivelmente seja a inversa dela, isto é, In + A + A2 , e verificar se o produto das duas matrizes é igual à matriz
identidade In .
(In − A)(In + A + A2 ) = In (In + A + A2 ) − A(In + A + A2 ) = In + A + A2 − A − A2 − A3 = In .
Aqui foram usadas as propriedades (i) e (o) do Teorema 1.1 na página 3.
2.1.2
Método para Inversão de Matrizes
O exemplo seguinte mostra, para matrizes 2×2, não somente uma forma de descobrir se uma matriz A tem inversa,
mas também como a encontrar, no caso em que ela exista. Ou seja, escalonamos a matriz [A|I2 ] e encontramos a
sua forma escalonada reduzida [R|S]. Se R = I2 , então a matriz A é invertível (Porquê?) e a inversa A−1 = S. Caso
contrário, a matriz A é singular.
Exemplo 2.3 Seja A =
"
a
c
b
d
satisfaça o seguinte sistema
#
. Devemos procurar uma matriz B =
ax
cx
+
+
bz
dz
ay
cy
+
+
bw
dw
=
=
=
=
"
x
z
y
w
#
tal que AB = I2 , ou seja, que
1
0
.
0
1
Este sistema pode ser desacoplado em dois sistemas independentes que possuem a mesma matriz de coeficientes,
que é a matriz A. Podemos resolvê-los simultaneamente. Para isto, basta escalonarmos a matriz ampliada
"
#
a b 1 0
= [A|I2 ] .
c d 0 1
Os dois sistemas têm
" solução única# se, e somente se, a forma escalonada reduzida da matriz ampliada [A|I2 ]
1 0 s t
for da forma [I2 |S] =
(verifique, observando o que acontece se a forma escalonada reduzida da
0 1 u v
matriz A não for" igual a #I2 ). Neste caso, x = s, z = u e y = t, w = v, ou seja, a matriz A possuirá inversa,
s t
A−1 = B = S =
.
u v
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
32
Capítulo 2. Inversão de Matrizes e Determinantes
A demonstração do próximo teorema que daremos a seguir fornece um método para encontrar a inversa de uma
matriz se ela existir.
Teorema 2.5 Uma matriz A, n × n, é invertível se, e somente se, A é equivalente por linhas à matriz identidade
In .
Demonstração:
Pelo Teorema 2.3 na página 30, para verificarmos se uma matriz A, n × n, é invertível, basta verificarmos se
existe uma matriz B, tal que
AB
=
Vamos denotar as colunas de B por X1 , X2 , . . . , Xn , ou
x11
x12
x21
x22
X1 =
.. , X2 = ..
.
.
xn1
xn2
(2.1.2)
In .
seja, B = [X1 · · · Xn ],
x1n
x2n
, . . . , Xn = .
.
.
xnn
em que
,
e as colunas da matriz identidade In , por E1 , E2 , . . . , En , ou seja, B = [E1 · · · En ], em que
1
0
0
0
1
0
E1 =
.. , E2 = .. , . . . , En = .. .
.
.
.
0
0
1
Assim, a equação (2.1.2) pode ser escrita como
AB = A[X1 . . . Xn ] = [AX1 . . . AXn ] = [E1 . . . En ] = In ,
pois a j-ésima coluna do produto AB é igual a A vezes a j-ésima coluna da matriz B (Exercício 1.1.18 na página 9).
Analisando coluna a coluna a equação anterior, vemos que encontrar B é equivalente a resolver n sistemas lineares
AXj = Ej ,
para
j = 1, . . . , n.
Cada um dos sistemas pode ser resolvido usando o método de Gauss-Jordan. Para isso, formaríamos as matrizes
ampliadas [A|E1 ], [A|E2 ], . . . , [A|En ]. Entretanto, como as matrizes de coeficientes dos sistemas são todas iguais à
A, podemos resolver todos os sistemas simultaneamente formando a matriz n × 2n
[A|E1 E2 . . . En ] = [A|In ].
Transformando [A|In ] na sua forma escalonada reduzida, que vamos denotar por [R|S], vamos chegar a duas
situações possíveis: ou a matriz R é a matriz identidade, ou não é.
• Se R = In , então a forma escalonada reduzida da matriz [A|In ] é da forma [In |S]. Se escrevermos a matriz
S em termos das suas colunas, S = [S1 S2 . . . Sn ], então as soluções dos sistemas AXj = Ej são Xj = Sj ;
assim B = S é tal que AB = In e pelo Teorema 2.3 na página 30 A é invertível.
• Se R 6= In , então a matriz A não é equivalente por linhas à matriz identidade In . Então, pelo Teorema 1.6
na página 21, a matriz R tem uma linha nula. Isto implica que os sistemas AXj = Ej não tenham solução
única ou sejam impossíveis. Ou seja, a matriz A não tem inversa, pois as colunas da (única) inversa seriam
Xj , para j = 1, . . . , n.
Observação 2.1 Da demonstração do Teorema 2.5 obtemos não somente uma forma de descobrir se uma matriz
A tem inversa, mas também como encontrar a inversa no caso em que ela exista. Ou seja, escalonamos a matriz
[A|In ] e encontramos a sua forma escalonada reduzida [R|S]. Se R = In , então a matriz A é invertível e a inversa
A−1 = S. Caso contrário, a matriz não é invertível.
Vejamos os exemplos seguintes.
Exemplo 2.4 Vamos encontrar, caso exista, a inversa da matriz
1
−1
1
A= 0
10 25 .
20 10
0
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
33
Capítulo 2. Inversão de Matrizes e Determinantes
1a eliminação
−20 ×
1a
linha +
3a
3a
−→
linha
1
0
0
linha
2a eliminação
×2a linha + 10 × 1a linha
−3 × 2a linha + 3a linha
1a linha
3a linha
1a linha
2a linha
−→
−→
3a eliminação
7 × 3a linha + 19 × 1a linha
5 × 3a linha + 19 × 2a linha
1/190 × 1a linha
1/190 × 2a linha
−1/95 × 3a linha
−→
−→
−→
−→
−→
10
0
0
190
0
0
1a linha
2a linha
3a linha
1
0
0
0
1
0
0
0 .
1
−1
10
30
1
25
−20
1
0
−20
0
1
0
0
10
0
35
25
−95
10
0
−20
1
1
−3
0
190
0
5
19
10
− 19
4
19
0
0
1
50
−100
−20
0
0
−95
1
− 95
7
190
1
38
1
− 95
2
95
3
95
0
0 .
1
−2
4
−3
7
5 .
1
.
Assim, a matriz ampliada [A|I3 ] é equivalente por linhas à matriz ampiada acima, que é da forma [I3 |S].
Portanto, a matriz A é invertível e a sua inversa é a matriz S, ou seja,
1
7
5
− 95
19
190
2
1
10
.
A−1 = − 19
95
38
4
3
1
−
19
95
95
Exemplo 2.5 Vamos determinar, caso exista, a inversa
1
A= 1
0
Para isso, devemos escalonar a matriz ampliada
1
[A|I3 ] = 1
0
2
1
1
da matriz
2 3
1 2 .
1 1
3
2
1
1
0
0
0
1
0
1a eliminação
−1 × 1a linha + 2a linha
−→
0
0 .
1
1
0
0
2a linha
2a eliminação
−1 × 2a linha
2a
1a
−→
−2 ×
linha +
linha
−1 × 2a linha + 3a linha
2a linha
−→
−→
1a
linha
3a linha
1
0
0
2
1
1
1
0
0
2
−1
1
3
1
1
0
1
0
3
−1
1
1
1
0
1
1
0
1
−1
0
0
−1
0
−1
1
−1
0
1
0
0
0 .
1
2
−1
1
0
0 .
1
0
0 .
1
A matriz ampliada [A|I3 ] é equivalente por linhas à matriz ampliada acima, que é da forma [R|S], com R 6= I3 .
Assim, a matriz A não é equivalente por linhas à matriz identidade. Portanto, a matriz A não é invertível.
Se um sistema linear AX = B tem o número de equações igual ao número de incógnitas, então o
conhecimento da inversa da matriz dos coeficientes A−1 , reduz o problema de resolver o sistema a um simples
produto de matrizes, conforme enunciado no próximo teorema.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
34
Capítulo 2. Inversão de Matrizes e Determinantes
Teorema 2.6 Seja A uma matriz n × n. O sistema associado AX = B tem solução única se, e somente se, A é
invertível. Neste caso, a solução é X = A−1 B.
Demonstração:
Se a matriz A é invertível, então multiplicando AX = B por A−1 à esquerda em ambos os membros, obtemos
A−1 (AX)
=
A−1 B
(A−1 A)X
=
A−1 B
In X
=
A−1 B
X
=
A−1 B.
Aqui foram usadas as propriedades (h) e (o) do Teorema 1.1 na página 3. Portanto, X = A−1 B é a única solução
do sistema AX = B.
Por outro lado, se o sistema AX = B possui solução única, então a forma escalonada reduzida da matriz
ampliada do sistema [A|B] é da forma [R|C], em que R = In . Caso R não fosse a matriz identidade, como a matriz
A é quadrada, R possuiria uma linha nula (Teorema 1.6 na página 21), o que levaria a que o sistema AX = B ou
não tivesse solução ou tivesse infinitas soluções. Logo, pelo Teorema 2.3, concluímos que a matriz A é invertível. Vamos ver no próximo exemplo que se conhecemos a inversa de uma matriz, então a solução pode ser obtida
apenas multiplicando-se a inversa da matriz de coeficientes pela matriz dos termos independentes. Vejamos outra
vez o Exemplo 1.9 na página 13.
Exemplo 2.6 Consideremos o seguinte circuito eléctrico.
20Ω
10Ω
Q
b
i1
i3
80 volts
90 volts
10Ω
i2
b
P
15Ω
As equações para as correntes, resultantes das leis de Kirchhoff, são:
nó P :
nó Q :
“loop” direito :
“loop” esquerdo :
i1
−i1
−
+
20i1
+
i2
i2
10i2
10i2
+
−
+
i3
i3
25i3
=
=
=
=
0
0
90
80
A equação resultante do nó Q é equivalente à equação resultante do nó P , ou seja, contém informação redundante. Assim, podemos eliminá-la
i1 −
i2 +
i3 =
0
10i2 + 25i3 = 90 .
20i1 + 10i2
= 80
Deste modo, as matrizes associadas ao sistema são
1 −1
1
A= 0
10 25 ,
20
10
0
0
B = 90 .
80
No Exemplo 2.4 na página 32 determinamos a inversa desta matriz A, que é
5
1
7
− 95
19
190
10
2
1 .
A−1 = − 19
95
38
4
3
1
− 95
19
95
Sabendo-se a inversa da matriz A, podemos determinar as correntes eléctricas.
5
1
7
i1
− 95
0
19
190
2
1
90 =
i2 = X = A−1 B = − 10
19
95
38
4
3
1
i3
− 95
80
19
95
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
Assim, temos
2
4 .
2
2007/2008
35
Capítulo 2. Inversão de Matrizes e Determinantes
Observe que a matriz dos termos independentes contém apenas os valores das fontes. Por exemplo, se trocarmos
a fonte de 90 e 80 volts por uma de 115 e 60 volts, respectivamente, os novos valores para as correntes eléctricas
são
5
1
7
i1
− 95
0
1
19
190
−1
2
1
115 = 4 .
i2 = X = A B = − 10
19
95
38
4
3
1
i3
− 95
60
3
19
95
Exemplo 2.7 (Interpolação Polinomial) Sejam P1 (x1 , y1 ), . . . , Pn (xn , yn ), com x1 , . . . , xn números distintos.
Considere o problema de encontrar um polinómio de grau n − 1
p(x) = an−1 xn−1 + · · · + a1 x + a0 ,
que interpola os dados, no sentido em que p(xi ) = yi , para i = 1, . . . , n. Por exemplo, se os pontos são P1 (0, 10), P2 (1, 7), P3 (3, −11)
e P4 (4, −14), então o problema consiste em encontrar um polinómio de grau 3 que interpola os pontos dados (veja
o Exercício 1.2.13 na página 24).
30
y
20
10
0
x
-10
-20
-30
-2
-1
0
1
2
3
4
5
Vamos mostrar que existe um, e somente um, polinómio de grau n − 1 que interpola n pontos com abcissas
distintas.
Substituindo os pontos no polinómio p, obtemos um sistema linear AX = B, em que
n−1
xn−2
· · · x1 1
y1
x1
an−1
1
n−1
n−2
x
an−2
y2
· · · x2 1
x2
2
, B = . e A =
X=
..
..
..
..
..
.
.
.
.
.
.
.
.
xn−1
xn−2
· · · xn 1
a0
yn
n
n
A matriz A é chamada matriz de Vandermonde.
Vamos mostrar que AX = B tem solução única. Pelo Teorema 2.6 na página 34, um sistema de n equações e
n incógnitas, AX = B, tem solução única se, e somente se, o sistema homogéneo associado, AX = 0, tem somente
a solução trivial. X = [an−1 · · · a0 ] é solução do sistema homogéneo se, e somente se, o polinómio de grau n − 1,
p(x) = an−1 xn−1 + · · · + a1 x + a0 , se anula em n pontos distintos. Isto implica que o polinómio p é o polinómio
com todos os sues coeficientes iguais a zero. Portanto, o sistema homogéneo AX = 0 tem somente a solução trivial.
Isto prova que existe um, e somente um, polinómio de grau no máximo igual a n − 1 que interpola n pontos com
abcissas distintas.
Assim, a solução do sistema linear é X = A−1 B. Como a matriz A depende apenas das abcissas dos pontos,
tendo calculado a matriz A−1 , podemos determinar rapidamente os polinómios que interpolam vários conjuntos de
pontos desde que os pontos de todos os conjuntos tenham as mesmas abcissas dos pontos do conjunto inicial.
Exemplo 2.8 Criptografia Vamos transformar uma mensagem em uma matriz da seguinte forma. Vamos quebrar
a mensagem em pedaços de tamanho 3 e cada pedaço será convertido em uma matriz coluna usando a Tabela 2.1
de conversão entre caracteres e números.
Considere a seguinte mensagem criptografada
1ydobbr,?
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
36
Capítulo 2. Inversão de Matrizes e Determinantes
Quebrando a mensagem criptografada em pedaços de tamanho 3 e convertendo cada pedaço para uma coluna de
números usando a Tabela 2.1, obtemos a matriz
80 15
18
Y = 25
2 107 .
4
2
94
Sabendo-se que esta mensagem foi criptografada fazendo o produto da mensagem inicial pela matriz
1 1 0
M = 0 1 1 ,
0 0 1
então
X = M −1 Y
será a mensagem inicial convertida para números, ou seja,
1 −1
1
80
X = M −1 Y = 0
1 −1 25
0
0
1
4
15
2
2
18
59
107 = 21
94
4
15
0
2
5
13 .
94
Convertendo para texto, usando novamente a Tabela 2.1, temos que a mensagem que foi criptografada é
Tudo bem?
0
a
1
b
2
c
3
d
4
e
5
f
6
g
7
h
8
i
9
j
10
k
11
l
12
m
13
n
14
o
15
p
16
q
17
r
18
s
19
t
20
u
21
v
22
w
23
x
24
y
25
z
26
à
27
á
28
â
29
ã
30
ç
31
é
32
ê
33
í
34
ó
35
ô
36
õ
37
ú
38
ü
39
A
40
B
41
C
42
D
43
E
44
F
45
G
46
H
47
I
48
J
49
K
50
L
51
M
52
N
53
O
54
P
55
Q
56
R
57
S
58
T
59
U
60
V
61
W
62
X
63
Y
64
Z
65
À
66
Á
67
Â
68
Ã
69
Ç
70
É
71
Ê
72
Í
73
Ó
74
Ô
75
Õ
76
Ú
77
Ü
78
0
79
1
80
2
81
3
82
4
83
5
84
6
85
7
86
8
87
9
88
:
89
;
90
<
91
=
92
>
93
?
94
@
95
!
96
"
97
#
98
$
99
%
100
&
101
′
102
(
103
)
104
*
105
+
106
,
107
108
.
109
/
110
[
111
\
112
]
113
_
114
{
115
|
116
}
117
Vamos mostrar a recíproca da alínea (b) do Teorema 2.2 na página 29. Este resultado será útil na demonstração
de que o determinante do produto de matrizes é o produto dos determinantes (Subsecção 2.2.1 na página 43).
Teorema 2.7 Se A e B são matrizes n × n, com AB invertível, então A e B são invertíveis.
Demonstração:
Considere o sistema (AB)X = 0. Se B não fosse invertível, então existiria X 6= 0 tal que BX = 0 (Teorema
2.3 na página 30). Multiplicando-se por A, teríamos AB X = 0, o que (novamente pelo Teorema 2.3 na página 30)
contradiz o facto de AB ser invertível. Portanto, B é invertível. Agora, se B e AB são invertíveis, então A também
é invertível, pois A = (AB)B −1 , que é o produto de duas matrizes invertíveis.
Exercícios Numéricos
1
2.1.1 Seja A uma matriz 3 × 3. Suponha que X = −2 é solução do sistema homogéneo AX = 0. Será a matriz
3
A singular ou não? Justifique.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
37
Capítulo 2. Inversão de Matrizes e Determinantes
2.1.2 Se possível,encontre as inversas das seguintes matrizes:
(a)
(b)
(c)
1
1
0
2
1
1
1
1
1
2
3
3
1
1
1
1
1
2
−1
3
3
2
2
2
1
2
1
−1
2
3
1
2
1
2
(d)
(e)
(f)
2
2
2
1
1
0
2
1
1
3
2
1
1
1
1
5
1
3
2
9
1
1
−1
1
1
2.1.3 Encontre todos os valores de a para os quais a matriz A = 1
1
2.1.4 Se
A−1 =
"
3
1
encontre (AB)−1 .
2.1.5 Resolva o sistema AX = B, em que A−1 =
2
3
"
#
2
4
3
1
#
eB=
"
5
3
"
2
3
#
1
2
1
6
0
0 tem inversa.
a
1
0
2
B −1 =
e
3
3
4
1
0
1
5
−2
#
,
.
Exercícios usando o Matlabr
Comandos do Matlabr
>> M=[A,B] atribui à matriz M a matriz obtida colocando lado a lado as matrizes A e B.
>> A=[A1,. . ., An] cria uma matriz A formada pelas matrizes, definidas anteriormente, A1,. . .,An colocadas
uma ao lado da outra.
>> M=A(:,k:l) atribui à matriz M a submatriz da matriz A obtida da coluna l à coluna k da matriz A.
Comandos do pacote GAAL
>> B=opel(alpha,i,A) ou B=oe(alpha,i,A) faz a operação elementar
alpha*linha i =⇒ linha i da matriz A e armazena a matriz resultante em B.
>> B=opel(alpha,i,j,A) u B=oe(alpha,i,j,A) faz a operação elementar
alpha*linha i + linha j =⇒ linha j da matriz A e armazena a matriz resultante na variável B.
>> B=opel(A,i,j) ou B=oe(A,i,j) faz a troca da linha i com a linha j da matriz A e armazena a matriz
resultante na variável B.
>> B=escalona(A) calcula, passo a passo, a forma escalonada reduzida da matriz A e armazena a matriz
resultante na variável B.
2.1.6 O pacote GAAL contém alguns arquivos com mensagens criptografadas e uma “chave” para decifrá-las. Use os
comandos a seguir para ler dos arquivos e atribuir às variáveis correspondentes, uma mensagem criptografada
e uma chave para decifrá-la.
>> menc=lerarq(’menc1’), key=lerarq(’key’)
Aqui são lidos os arquivos menc1 e key. Para converter a mensagem criptografada e a chave para matrizes
numéricas, use os comandos do pacote gaal:
>> y=char2num(menc1), M=char2num(key)
A mensaem criptografada, y, foi obtida multiplicando-se a matriz M pela mensagem original (convertida para
números), x. Determine x. Descubra a mensagem usando o comando do pacote gaal, num2char(x). Decifre as
mensagens que estão nos arquivos menc2 e menc3. Como deve ser a matriz M para que ela possa ser uma matriz
chave na criptografia?
2.1.7 Resolva os Exercícios Numéricos a partir do Exercício 2.1.2 usando o Matlabr .
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
38
Capítulo 2. Inversão de Matrizes e Determinantes
Exercícios Teóricos
2.1.8 (a) Mostre que a matriz A =
por
"
a
c
b
d
#
é invertível se, e somente se, ad − bc 6= 0. Neste caso, a inversa é dada
A=
1
ad − bc
"
−b
a
d
−c
#
.
(Sugestão: encontre a forma escalonada reduzida da matriz [A|I2 ], para a 6= 0 e para a = 0.)
(b) Mostre que se ad − bc 6= 0, então o sistema linear
(
ax +
cx +
tem como solução
x=
gd − bh
,
ad − bc
by
dy
=
=
y=
g
h
ah − gc
.
ad − bc
Sugestão para os próximos 4 exercícios: Para verificar que uma matriz A é invertível, quando temos uma
matriz B que é candidata a inversa de A, basta fazer um dos produtos, AB ou BA, e verificar se é igual a In .
2.1.9 Se A é uma matriz n × n e Ak = 0, para k um inteiro positivo, mostre que
(In − A)−1 = In + A + A2 + · · · + Ak−1 .
2.1.10 Seja A uma matriz diagonal, isto é, os elementos que estão fora da diagonal são iguais a zero (aij = 0, para
i 6= j). Se aii 6= 0, para i = 1, . . . , n, mostre que A é invertível e a sua inversa é também uma matriz diagonal
com elementos na diagonal dados por 1/a11 , 1/a22 , . . . , 1/ann .
2.1.11 Sejam A e B matrizes quadradas. Mostre que se A + B e A forem invertíveis, então
(A + B)−1 = A−1 (In + BA−1 )−1 .
2.1.12 Seja Jn a matriz n × n, cujas entradas são iguais a 1. Mostre que se n > 1, então
1
(In − Jn )−1 = In −
Jn .
n−1
(Sugestão: observe que Jn2 = nJn .)
2.1.13 Mostre que se B é uma matriz invertível, então AB −1 = B −1 A se, e somente se, AB = BA. (Sugestão:
multiplique a equação AB = BA por B −1 .)
2.1.14 Mostre que se A é uma matriz invertível, então A + B e In + BA−1 são ambas invertíveis ou ambas não
invertíveis. (Sugestão: multiplique A + B por A−1 .)
2.1.15 Mostre que se A não é invertível, então AB também não o é.
2.1.16 Mostre que se A e B são matrizes n × n invertíveis, então A e B são equivalentes por linhas.
2.1.17 Sejam A uma matriz m × n e B uma matiz n × m, com n < m. Mostre que AB não é invertível. (Sugestão:
Mostre que o sistema (AB)X = 0 tem solução não trivial.)
2.2
Determinantes
Vamos inicialmente definir o determinante de uma matriz 1 × 1. Para cada matriz A = [a], definimos o determinante de A, indicado det(A), por det(A) = a. Vamos agora definir o determinante de matrizes 2 × 2 e a
partir daí definir para matrizes de ordem superior. A cada matriz A, 2 × 2, associamos um número real, denominado
determinante de A, por:
"
#
a11 a12
det(A) = det
= a11 a22 − a12 a21 .
a21 a22
Para definir o determinante de matrizes quadradas maiores, precisamos definir o que são os menores de uma
eij , é a submatriz (n − 1) × (n − 1)
matriz. Dada uma matriz A = (aij )n×n , o menor do elemento aij , denotado por A
de A obtida eliminando-se a i-ésima linha e a j-ésima coluna de A, que tem o seguinte aspecto:
eij
A
Introdução à Álgebra Linear
a11
.
.
.
=
.
.
.
an1
···
j
···
aij
Opto, Qui Ind, Mat
a1n
..
.
i
..
.
ann
2007/2008
39
Capítulo 2. Inversão de Matrizes e Determinantes
Exemplo 2.9 Para a matriz A = (aij )3×3 ,
a11
e23 =
A
a21
a31
a12
a22
a32
"
a13
a11
a23 =
a31
a33
a12
a32
#
.
Agora vamos definir os cofactores de uma matriz quadrada A = (aij )3×3 . O cofactor do elemento aij , denotado
por Aij , é definido por
eij ,
Aij = (−1)i+j det A
ou seja, o cofactor Aij , do elemento aij é igual a mais
menos determinados pela seguinte disposição:
+
−
+
Exemplo 2.10 Para uma matriz A = (aij )3×3 ,
a11
e23 ) = − det
A23 = (−1)2+3 det(A
a21
a31
a12
a22
a32
eij , sendo o mais e o
ou menos o determinante do menor A
−
+
−
+
− .
+
"
a13
a11
a23 = − det
a31
a33
a12
a32
#
= a31 a12 − a11 a32 .
Vamos agora definir o determinante de uma matriz 3 × 3. Se
a11 a12 a13
A = a21 a22 a23 ,
a31 a32 a33
então o determinante de A é igual à soma dos produtos dos elementos da 1a linha pelos seus cofactores.
det(A)
=
=
=
a11 A11 + a12 A12 + a13 A13
#
"
"
a22 a23
a21
a11 det
− a12 det
a32 a33
a31
a23
a33
#
+ a13 det
"
a21
a31
a22
a32
#
a11 a22 a33 − a11 a32 a23 − a12 a21 a33 + a12 a31 a23 + a13 a21 a32 − a13 a31 a22 .
Da mesma forma que a partir do determinante de matrizes 2 × 2 definimos o determinante de matizes 3 × 3,
podemos definir o determinante de matrizes quadradas de ordem maior. Supondo que sabemos como calcular o
determinante de matrizes (n − 1) × (n − 1), vamos definir o determinante de matrizes n × n.
Vamos definir agora os cofactores de uma matriz quadrada A = (aij )n×n . O cofactor do elemento aij , denotado
por Aij , é definido por
eij ,
Aij = (−1)i+j det A
ou seja, o cafactor Aij do elemento aij é igual a mais ou menos o
determinados pela seguinte disposição:
+ − + −
− + − +
+ − + −
− + − +
.
..
..
..
..
.
.
.
eij , sendo o mais ou menos
determinante do menor A
···
···
···
···
..
.
.
Definição 2.2 Seja A = (aij )n×n . O determinante de A, denotado por det(A), é definido por
det(A)
=
a11 A11 + a12 A12 + · · · + a1n A1n =
n
X
a1j A1j ,
(2.2.3)
j=1
e1j ) é o cofactor do elemento a1j . A expressão (2.2.3) é chamada desenvolvimento
em que A1j = (−1)1+j det(A
em cofactores do determinante de A em termos da 1a linha.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
40
Capítulo 2. Inversão de Matrizes e Determinantes
Exemplo 2.11 Seja
0 0
0 −3
1 2
3
4
A=
−1 3
2
5
2 1 −2
0
Desenvolvendo-se o determinante de A em cofactores, obtemos
det(A) = 0A11 + 0A12 + 0A13
.
1
+ (−3)(−1)1+4 det(B), em que B = −1
2
Mas o det(B) também pode ser calculado usando cofactores,
det(B)
2
3
1
3
2 .
−2
=
1B11 + 2B12 + 3B13
=
e11 ) + 2(−1)1+2 det(B
e12 ) + 3(−1)1+3 det(B
e13 )
1(−1)1+1 det(B
"
#
"
#
"
#
3
2
−1
2
−1 3
det
− 2 det
+ 3 det
1 −2
2 −2
2 1
=
=
−8 − 2(−2) + 3(−7)
=
−25.
Portanto,
det(A) = 3 det(B) = −75
Exemplo 2.12 Usando a definição de determinante, vamos mostrar que o determinante de uma matriz triangular
inferior (isto é, os elementos situados acima da diagonal principal são iguais a zero) é o produto dos elementos da
diagonal principal. Vamos mostrar inicialmente para matries 3 × 3. Seja
a11
0
0
A = a21 a22
0 .
a31 a32 a33
Desenvolvendo-se o determinante de A em cofactores, obtemos
"
#
a22
0
det(A) = a11 det
= a11 a22 a33 .
a32 a33
Vamos supor que é verdade que para qualquer matriz (n − 1) × (n − 1) triangular inferior, o determinante é o
produto dos elementos da diagonal principal. Então vamos provar que isto também vale para matrizes n × n. Seja
a11
0
0
···
0
a
0
···
0
21 a22
.
..
..
.
..
..
.
.
A= .
.
.
.
.
..
..
..
.
.
.
.
.
0
an1
an2
an3
···
Desenvolvendo-se o determinante de A em cofactores, obtemos
a22
0
···
0
.
.
..
..
.
..
.
.
.
det(A) = a11 det
.
.
.
.
..
..
.
0
an2 an3 · · · ann
ann
= a11 a22 . . . ann ,
pois o determinante acima é de uma matriz (n − 1) × (n − 1) triangular inferior. Em particular, o determinante da
matriz identidade In é igual a 1 (det(In ) = 1).
Vamos agora provar uma propriedade importante do determinante. Para isso, vamos escrever a matriz A =
(aij )n×n em termos das suas linhas
A1
..
.
A
k−1
A = Ak ,
Ak+1
..
.
An
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
41
Capítulo 2. Inversão de Matrizes e Determinantes
em que Ai é a linha i da matriz A, ou seja, Ai = [ai1 ai2 · · · ain ]. A propriedade a que nos referimos acima é que
se Ak = αX + βY , em que X = [x1 · · · xn ], Y = [y1 · · · yn ] e α e β são escalares, então
A1
A1
A1
.
.
.
..
..
..
Ak−1
Ak−1
Ak−1
det αX + βY = α det X
Y
+ β det
.
Ak+1
Ak+1
Ak+1
.
.
.
..
..
..
An
An
An
Vamos verificar isto, em primeiro lugar, no caso em que a matriz A é 2 × 2.
Exemplo 2.13 Seja A = (aij )2×2 e vamos supor que A2 = αX + βY , em que X = [x1 x2 ], Y = [y1 y2 ] e α e β
são escalares. Então"
#
a11
a12
det
= a11 (αx2 + βy2 ) − a12 (αx1 + βy1 )
αx1 + βy1 αx2 + βy2
=
=
α(a11 x2 − a12 x1 ) + β(a11 y2 − a12 y1 )
#
"
#
"
a11 a12
a11 a12
α det
+ β det
.
x1
x2
y1
y2
De forma análoga se mostra que se A1 = αX + βY , em que X = [x1 x2 ], Y = [y1 y2 ] e α e β são escalares,
então
"
#
αx1 + βy1 αx2 + βy2
det
= a22 (αx1 + βy1 ) − a21 (αx2 + βy2 )
a21
a22
"
#
"
#
x1
x2
y1
y2
= α det
+ β det
.
a21 a22
a21 a22
Vamos verificar agora a propriedade acima para matrizes n × n no caso em que a 1a linha, A1 , é da forma
A1 = αX + βY , em que X = [x1 · · · xn ], Y = [y1 · · · yn ] e α e β são escalares.
Exemplo 2.14 Para uma matriz
e β são escalares, então
αX + βY
A2
det
.
..
An
A = (aij )n×n se A1 = αX + βY , em que X = [x1 · · · xn ], Y = [y1 · · · yn ] e α
=
n
X
e1j )
(−1)1+j (αxj + βyj ) det(A
j=1
=
α
n
X
e1j ) + β
(−1)1+j xj det(A
j=1
=
α det
X
A2
..
.
An
+ β det
Y
A2
..
.
An
n
X
e1j )
(−1)1+j yj det(A
j=1
.
Vamos provar a seguir o caso geral.
Teorema 2.8 Seja A = (aij )n×n escrita em termos das suas linhas, denotadas por Ai , ou seja, Ai = [ai1 ai2 · · · ain ].
Se para algum k, a linha Ak = αX + βY , em que X = [x1 · · · xn ], Y = [y1 · · · yn ] e α e β são escalares, então
A1
A1
A1
..
..
..
.
.
.
Ak−1
Ak−1
Ak−1
det αX + βY = α det X
Y
.
+ β det
A
A
A
k+1
k+1
k+1
.
.
.
..
..
..
An
An
An
Aqui, Ak = αX + βY = [αx1 + βy1 · · · αxn + βyn ].
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
42
Capítulo 2. Inversão de Matrizes e Determinantes
Demonstração:
Mostrámos no Exemplo 2.13 que para matrizes 2 × 2 o resultado é verdadeiro. Supondo que o resultado seja
verdadeiro para matrizes (n − 1) × (n − 1), vamos provar para matrizes n × n. Sejam
A1
A1
A1
.
.
.
..
..
..
Ak−1
Ak−1
Ak−1
e C=
A = αX + βY , B = X
Y
.
A
A
A
k+1
k+1
k+1
..
..
..
.
.
.
An
An
An
e1j , B
e 1j e C
e1j só
O caso em que k = 1 foi provado no Exemplo 2.14. Suponha que k = 2, . . . , n. As matrizes A
e1j
diferem na (k − 1)-ésima linha (lembre-seque a primeira linha é retirada.!). Além disso, a (k − 1)-ésima linha de A
e1j mais β vezes a linha correspondente de C
e1j (esta é a relação que vale
é igual a α vezes a linha correspondente de B
para a k-ésima linha de A). Como estamos supondo o resultado verdadeiro para matrizes (n − 1) × (n − 1), então
e1j ) = α det(B
e1j ) + β det(C
e1j ). Assim,
det(A
det(A)
=
n
X
e1j )
(−1)1+j a1j det(A
j=1
=
n
X
h
i
e1j ) + β det(C
e1j )
(−1)1+j a1j α det(B
j=1
=
α
n
X
e1j ) + β
(−1)1+j b1j det(B
j=1
=
α det(B) + β det(C),
n
X
e1j )
(−1)1+j c1j det(C
j=1
pois a1j = b1j = c1j , para j = 1, . . . , n.
Exemplo 2.15 O cálculo do determinante da matriz
a
0
0
det
b
c
d
= det
e + 3h f + 3c g + 3d
a seguir pode ser feito
a 0 0
b c d + 3 det
e f g
da seguinte forma:
a 0 0
b c d = a(cg − df ).
h c d
Corolário 2.8.1 Se uma matriz A, n × n, possui uma linha formada inteiramente por zeros, então
det(A) = 0.
Demonstração:
Seja A uma matriz que tem uma linha nula. Multiplicando-se a linha nula por qualquer escalar α, obtemos pelo
Teorema 2.8 que det(A) = α det(A), para qualquer escalar α. Ou seja, det(A) = 0.
Pela definição de determinante, o determinante deve ser calculado fazendo-se o desenvolvimento em cofactores
segundo a 1a linha. O próximo resultado, que não vamos demonstrar neste momento (Apêndice II na página 50),
afirma que o determinante pode ser calculado fazendo-se o desenvolvimento em cofactores segundo qualquer linha.
Teorema 2.9 Seja A uma matriz n × n. O determinante de A pode ser calculado fazendo-se o desenvolvimento
em cofactores segundo qualquer linha. Ou seja, para i = 1, . . . , n,
det(A) = ai1 Ai1 + ai2 Ai2 + · · · + ain Ain =
n
X
aij Aij ,
(2.2.4)
j=1
eij ) é o cofactor do elemento aij . A expressão (2.2.4) é chamada desenvolvimento
em que Aij = (−1)i+j det(A
em cofactores do determinante de A em termos da i-ésima linha.
Temos a seguinte consequência deste resultado.
Corolário 2.9.1 Seja A uma matriz n × n. Se A possui duas linhas iguais, então det(A) = 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
43
Capítulo 2. Inversão de Matrizes e Determinantes
Demonstração:
O resultado é claramente verdadeiro para matrizes 2 × 2. Supondo que o resultado seja verdadeiro para matrizes
(n − 1) × (n − 1), vamos provar que ele é verdadeiro para matrizes n × n. Suponhamos que as linhas k e ℓ sejam
iguais, para k 6= ℓ. Desenvolvendo o determinante de A em termos de uma linha i, com i 6= k, ℓ, obtemos
det(A) =
n
X
aij Aij =
j=1
n
X
eij ).
(−1)i+j aij det(A
j=1
eij é uma matriz (n − 1) × (n − 1) com duas linhas iguais. Como estamos supondo que o resultado seja
Mas cada A
eij ) = 0. Isto implica que det(A) = 0.
verdadeiro para estas matrizes, então det(A
2.2.1
Propriedades do Determinante
Teorema 2.10 Sejam A e B matrizes n × n.
(a) Se B é obtida de A multiplicando-se uma linha por um escalar α, então
det(B) = α det(A).
(b) Se B resulta de A pela troca da posição relativa de duas linhas, então
det(B) = − det(A).
(c) Se B é obtida de A substituindo a linha i por ela somada a um múltiplo escalar de uma outra linha j, com
j 6= i, então
det(B) = det(A).
(d) Os determinantes de A e da sua transposta AT são iguais,
det(AT ) = det(A).
(e) O determinante do produto de A por B é igual ao produto dos seus determinantes
det(AB) = det(A) det(B).
Demonstração:
Vamos demonstrar, agora, apenas as alíneas (a), (b) e (c) deste teorema.
(a) Segue directamente do Teorema 2.8 na página 41.
(b) Sejam
A=
h
A1
···
Ak
···
Aℓ
···
An
iT
e
B=
h
A1
···
Aℓ
Agora, pelo Teorema 2.8 na página 41 e o Corolário 2.9.1, temos que
A1
A1
A1
A1
.
.
.
.
..
..
..
..
Ak + Aℓ
Ak
Ak
Aℓ
.
.
.
= det . + det . + det ..
.
0 = det
.
.
.
.
A +A
A
A
A
ℓ
k
ℓ
k
k
.
.
.
.
.
.
.
.
.
.
.
.
An
An
An
An
=
0 + det(A) + det(B) + 0.
···
Ak
···
A1
.
.
.
Aℓ
+ det ..
.
A
ℓ
.
.
.
An
An
iT
.
Portanto, det(A) = − det(B).
(c) Novamente, pelo Teorema 2.8 na página 41, temos que
A1
A1
A1
.
.
..
.
.
.
.
.
Ak
Ak
A
k
.
.
.
..
det
= det .. + α det ..
A
A
A + αA
ℓ
k
k
ℓ
.
..
.
..
.
.
.
An
An
An
= det
A1
..
.
Ak
.
..
Aℓ
..
.
An
.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
44
Capítulo 2. Inversão de Matrizes e Determinantes
Observação 2.2 Como o determinante de uma matriz é igual ao determinante da sua transposta (Teorema 2.10
(d)), segue que todas as propriedades que se referem a linhas são válidas com relação às colunas.
Exemplo 2.16 Vamos calcular o determinante da matriz
0
1
A = 3 −6
2
6
5
9
1
usando operações elementares, para transformá-la numa matriz triangular superior,
página 43.
3 −6 9
det(A) = − det 0
1 5
1a linha ←→ 2a
2
6 1
1 −2 3
= −3 det 0
1 5
1/3 × 1a linha ←→
2
6 1
1 −2
3
= −3 det 0
−2 × 1a linha + 3a linha
1
5
0
10 −5
1 −2
3
= −3 det 0
1
5
−10 × 2a linha + 3a linha
0
0 −55
=
e aplicando o Teorema 2.10 na
linha
1a linha
←→
3a linha
←→
3a linha
(−3)(−55) = 165
Observação 2.3 Quando multiplicamos uma linha de uma matriz por um escalar α, o determinante da nova matriz
é igual a α multiplicado pelo determinante da matriz antiga. Mas o que estamos calculando aqui é o determinante
da matriz antiga. Por isso, ele é igual a 1/α multiplicado pelo determinante da matriz nova.
Para se calcular o determinante de uma matriz n × n pela expansão de cofactores, precisamos fazer n produtos
e calcular n determinantes de matrizes (n − 1) × (n − 1), que por sua vez vai precisar de n − 1 produtos e assim por
diante. Portanto, ao todo são necessários n! produtos. Por exemplo, para se calcular o determinante de uma matriz
20 × 20, é necessário realizar 20! ≈ 1018 produtos. Os computadores pessoais realizam na ordem de 108 produtos
por segundo. Portanto, um computador pessoal precisaria cerca de 1010 segundos, ou 103 anos, para calcular o
determinante de uma matriz 20 × 20 usando a expansão em cofactores. Entretanto, usando o método apresentado
no exemplo anterior para o cálculo do determinante, é necessário apenas n3 produtos. Ou seja, para calcular o
determinante de uma matriz 20 × 20 usando o método apresentado no exemplo anterior, um computador pessoal
gasta muito menos de um segundo.
O resultado seguinte caracteriza em termos de determinante as matrizes invertíveis e os sistemas lineares homogéneos que possuem solução não trivial.
Teorema 2.11 Seja A uma matriz n × n.
(a) A matriz A é invertível se, e somente se, det(A) 6= 0.
(b) O sistema homogéneo AX = 0 tem solução não trivial se, e somente se, det(A) = 0.
Demonstração:
(a) Seja R a forma escalonada reduzida da matriz A.
A demonstração deste item segue de três observações.
• Pelo Teorema 2.10 na página 43, det(A) 6= 0 se, e somente se, det(R) 6= 0.
• Pelo Teorema 1.6 na página 21, ou R = In ou a matriz R tem uma linha nula. Assim, det(A) 6= 0 se, e
somente se, R = In .
• Pelo Teorema 2.5 na página 32, R = In se, e somente se, A é invertível.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
45
Capítulo 2. Inversão de Matrizes e Determinantes
(b) Pelo Teorema 2.3 na página 30, o sistema homogéneo AX = 0 tem solução não trivial se, e somente se, a matriz
A não é invertível. Pelo teorema anterior, a matriz A é não invertível se, e somente se, det(A) = 0.
Exemplo 2.17 Seja A = (aij )n×n . Vamos mostrar que se A é invertívl, então
det(A−1 ) =
1
.
det(A)
Como AA−1 = In , aplicando-se o determinante a ambos os membros desta igualdade e usando a propriedade
(e) do Teorema 2.10 na página 43, obtemos
det(A) det(A−1 ) = det(In ).
Mas det(In ) = 1 (Exemplo 2.12 na página 40, a matriz identidade também é triangular inferior!). Logo,
1
det(A−1 ) =
.
det(A)
Exemplo 2.18 Se uma matriz quadrada é tal que A2 = A−1 , então vamos mostrar que det(A) = 1. Aplicando-se
o determinante a ambos os membros da igualdade acima, e usando novamente a propriedade (e) do Teorema 2.10
e o resultado do exemplo anterior, obtemos
(det(A))2 =
1
.
det(A)
Logo, (det(A))3 = 1. Portanto, det(A) = 1.
Exemplo 2.19 A matriz
A é dada por
"
a
c
b
d
#
é invertível se, e somente se, det(A) = ad − bc 6= 0. Neste caso a inversa de
A−1 =
1
det(A)
"
−b
a
d
−c
#
,
como pode ser verificado multiplicando-se a candidata a inversa pela matriz A.
Observe que este exemplo fornece uma regra para se encontrar a inversa de uma matriz 2 × 2: troca-se a
posição dos elementos da diagonal principal, troca-se o sinal dos outros elementos e divide-se todos os elementos
pelo determinante de A.
2.2.2
Matriz Adjunta e Inversão
Vamos definir a adjunta de uma matriz quadrada e em seguida enunciar e provar um teorema sobre a adjunta
que permite provar vários resultados sobre matrizes, entre eles um que fornece uma fórmula para a inversa de uma
matriz e também a regra de Cramer. Tanto a adjunta quanto os resultados que vêm a seguir são de importância
teórica.
Definição 2.3 Seja A uma matriz n×n. Definimos a matriz adjunta de A, denotada por adj(A), como a transposta
da matriz formada pelos cofactores de A. Ou seja,
A11
A21
adj(A) =
..
.
An1
A12
A22
.
..
An2
···
···
···
A1n
A2n
.
..
Ann
T
A11
A12
=
..
.
A1n
A21
A22
.
..
A2n
···
···
···
eij ) é o cofactor do elemento aij , para i, j = 1, . . . , n.
em que Aij = (−1)i+j det(A
Exemplo 2.20 Seja
1
B= 0
0
Introdução à Álgebra Linear
2
3
0
An1
An2
.
..
Ann
,
3
2 .
−2
Opto, Qui Ind, Mat
2007/2008
46
Capítulo 2. Inversão de Matrizes e Determinantes
Vamos calcular a adjunta de B.
"
#
3
2
1+1
B11 = (−1)
det
= −6,
0 −2
"
#
0 3
B13 = (−1)1+3 det
= 0,
0 0
"
#
1
3
B22 = (−1)2+2 det
= −2,
0 −2
"
#
2 3
B31 = (−1)3+1 det
= −5,
3 2
"
#
1 2
B33 = (−1)3+3 det
= 3.
0 3
B12 =
(−1)1+2
det
B21 = (−1)2+1 det
B23 = (−1)2+3 det
B32 =
(−1)3+2
det
"
"
"
"
0
0
2
0
1
0
1
0
2
−2
#
= 0,
#
3
= 2,
−2
#
2
= 0,
0
#
3
= −2,
2
Assim, a adjunta de B é
−6
adj(B) =
4
−5
0
−2
−2
T
0
−6
0 = 0
3
0
−5
−2 .
3
4
−2
0
Na definição do determinante são multiplicados os elementos de uma linha pelos respectivos cofactores. O teorema
seguinte estabelece o que acontece se somamos os produtos dos elementos de uma linha com os cofactores de outra
linha ou se somamos os produtos dos elementos de uma coluna com os cofactores de outra coluna.
Lema 2.1 Se A é uma matriz n × n, então
ak1 Ai1 + ak2 Ai2 + · · · + akn Ain
=
0
a1k A1j + a2k A2j + · · · + ank Anj
=
0
se k 6= i;
(2.2.5)
se k 6= j,
(2.2.6)
eij ) é o cofactor do elemento aij , para i, j = 1, . . . , n.
em que Aij = (−1)i+j det(A
Demonstração:
b como sendo a matriz obtida de A substituindo a i-ésima
Para demonstrar a equação (2.2.5), definimos a matriz A
linha de A por sua k-ésima linha, ou seja
A1
A1
.
.
.
.
.
.
Ai
Ai
i
i
.
.
b
e
A = ..
A = ..
A
A
k
k
k
k
.
.
.
.
.
.
An
An
b possui duas linhas iguais e, pelo Corolário 2.9.1 na página 42, det(A)
b = 0. Mas, o determinante de A
b
Assim, A
desenvolvido segundo a sua i-ésima linha é exactamente a equação (2.2.5).
A demonstração de (2.2.6) é feita de forma análoga, mas usando a alínea (d) do Teorema 2.10, ou seja, det(A) =
det(AT ).
Teorema 2.12 Se A é uma matriz n × n, então
A (adj(A)) = (adj(A)) A = det(A)In .
Demonstração:
O produto da matriz A pela matriz adjunta de
a11 a12 · · · a1n
.
..
..
.
.
.
.
ai1
a
·
·
·
a
i2
in
.
..
..
.
.
.
.
an1 an2 · · · ann
Introdução à Álgebra Linear
A é dada por
A11 · · ·
A12 · · ·
.
.
.
A1n · · ·
Aj1
Aj2
..
.
Ajn
Opto, Qui Ind, Mat
···
···
···
An1
An2
..
.
Ann
.
2007/2008
47
Capítulo 2. Inversão de Matrizes e Determinantes
O elemento de posição i, j de Aadj(A) é
A (adj(A))ij =
n
X
k=1
aik Ajk = ai1 Aj1 + ai2 Aj2 + · · · + ain Ajn .
Do Lema 2.1, da equação (2.2.5) e do Teorema 2.9 na página 42 segue que
(
det(A)
se i = j
A (adj(A))ij =
0
se i 6= j
Assim
A (adj(A)) =
det(A)
0
..
.
0
0
det(A)
..
.
0
···
···
..
.
···
0
0
..
.
det(A)
= det(A)In .
Analogamente, usando o Lema 2.1 e a equação (2.2.6), se prova que adj(A)A = det(A)In .
Exemplo 2.21 Vamos mostrar que se uma matriz A é singular, então adj(A) também é singular. Vamos separar
em dois casos.
(a) Se A = 0, então adj(A) também é nula, logo também é singular.
(b) Se A 6= 0, então pelo Teorema 2.12 na página 46, adj(A)A = 0. Assim, se adj(A) fosse invertível, então A
seria igual à matriz nula (por quê?), o que contradiz a nossa hipótese. Portanto, adj(A) tem que ser singular.
Corolário 2.12.1 Seja A uma matriz n × n. Se det(A) 6= 0, então
A−1 =
Demonstração:
Como det(A) 6= 0, então definindo B =
AB = A(
1
adj(A).
det(A)
1
adj(A), pelo Teorema 2.12 temos que
det(A)
1
1
1
adj(A)) =
(Aadj(A)) =
det(A)In = In .
det(A)
det(A)
det(A)
Aqui usámos a propriedade (j) do Teorema 1.1 na página 3. Portanto, A é invertível e B é a inversa de A.
Exemplo 2.22 No Exemplo 2.19 na página 45 mostrámos como obter rapidamente a inversa de uma matriz 2 × 2.
Usando o Corolário 2.12.1 podemos também obter a inversa de uma matriz 2 × 2,
"
#
a b
A=
,
c d
"
#
1
1
d −b
adj(A) =
,
se det(A) 6= 0.
A−1 =
det(A)
det(A)
−c
a
Ou seja, a inversa de uma matriz 2×2 é facilmente obtida trocando-se a posição dos elementos da diagonal principal,
trocando-se o sinal dos outros elementos e dividindo-se todos os elementos pelo determinante de A.
Exemplo 2.23 Vamos calcular a inversa da matriz
1
B= 0
0
2
3
0
3
2 .
−2
A sua adjunta foi calculada no Exemplo 2.20 na página 45. Assim
−6
4 −5
1
1
1
B −1 =
adj(B) =
0 −2 −2 = 0
det(B)
−6
0
0
3
0
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
−2/3
1/3
0
5/6
1/3 .
−1/2
2007/2008
48
Capítulo 2. Inversão de Matrizes e Determinantes
Corolário 2.12.2 (Regra de Cramer) Se o sistema linear AX = B é tal que a matriz A é n × n e invertível,
então a solução do sistema é dada por
x1 =
det(A1 )
det(A2 )
det(An )
, x2 =
, . . . , xn =
,
det(A)
det(A)
det(A)
em que Aj é a matriz que se obtém de A substituindo-se a sua j-ésima coluna por B, para j = 1, . . . , n.
Demonstração:
Como A é invertível, pelo Corolário 2.12.1
X = A−1 B =
1
adj(A)B.
det(A)
A entrada xj é dada por
det(Aj )
1
(A1j b1 + · · · + Anj bn ) =
,
det(A)
det(A)
em que Aj é a matriz que se obtém de A substituindo-se a sua j-ésima coluna por B, para j = 1, . . . , n e det(Aj ) foi
calculado fazendo o desenvolvimento em cofactores em relação à j-ésima coluna de Aj .
xj =
Se a matriz A não é invertível, então a regra de Cramer não pode ser aplicada. Pode ocorrer que det(A) =
det(Aj ) = 0, para j = 1, . . . , n e o sistema tenha uma infinidade de soluções ou não tenha solução (verifique!). A
regra de Cramer fornece uma fórmula para a solução de um sistema linear, quando a matriz de coeficientes do sistema
é quadrada e invertível.
Exercícios Numéricos
2.2.1 Se det(A) = −3, encontre
(a) det(A2 )
(b) det(A3 )
(c) det(A−1 )
(d) det(AT )
2.2.2 Se A e B são matrizes n × n tais que det(A) = −2 e det(B) = 3, calcule det(AT B −1 ).
2.2.3 Seja A = (aij )3×3 tal que det(A) = 3. Calcule o determinante das matrizes a seguir:
a11
(a) a21
a31
a13 + a12
a23 + a22
a33 + a32
a12
a22
a32
2.2.4 Prove que
det
a11 − a12
a21 − a22
a31 − a32
a11 + a12
(b) a21 + a22
a31 + a32
2a
b+a
c+a
d+a
a+b
2b
c+b
d+b
a+c
b+c
2c
d+c
a+d
b+d
c+d
2d
2.2.5 Calcule o determinante de cada uma das seguintes matrizes.
(a)
"
2
4
#
5
1
(b)
"
6
3
1
−2
a13
a23
a33
= 0.
#
2.2.6 Calcule o determinante de cada uma das seguintes matrizes usando operações elementares para transformá-las
em matrizes triangulares superiores.
(a)
1
5
−1
2
−2
−9
2
8
3
6
−6
6
1
3
−2
1
(b)
2
1
0
0
1
0
2
1
3
1
1
2
1
1
0
2
2.2.7 Determine todos os valores de λ para os quais det(A − λIn ) = 0, em que
0
(a) A = 0
0
1
0
0
2
(c) A = 0
0
−2
3
−1
2
3
0
3
−2
2
Introdução à Álgebra Linear
1
(b) A = −1
3
2
(d) A = 1
2
0
3
2
2
2
−2
Opto, Qui Ind, Mat
0
0
−2
3
1
1
2007/2008
49
Capítulo 2. Inversão de Matrizes e Determinantes
a
0
b
0
2.2.8 Considere a matriz A =
0
a
0
b
b
0
a
0
(a) Verifique que det(A) = (a2 − b2 )2 .
0
b
0
a
.
(b) Para que valores de a e b é a matriz não singular?
(c) Calcule A−1 para os casos em que existe inversa.
2.2.9 Ache os valores de λ para os quais o sistema linear (A − λIn )X = 0 tem solução não trivial.
2
(a) A = 3
0
0
−1
4
0
0
3
1
0
(c) A =
0
0
2
−1
0
0
3
3
3
0
4
2
3
2
2
(b) A = 0
0
3
1
0
0
0
2
2
0
(d) A =
0
0
2
2
0
0
3
3
1
0
4
2
1
1
2.2.10 Para as matrizes do exercício anterior, e os valores de λ encontrados, encontre a solução geral do sistema
homogéneo (A − λIn )X = 0.
1
2 −2
3
3 −1
5
0
2.2.11 Para a matriz
encontre o cofactor do:
4
0
2
1
1
7
2 −3
(a) elemento 4
1 1
2.2.12 Seja A = 1 1
0 2
(b) elemento 5
0
1 . Encontre (a) adj(A)
1
(c) elemento 7
(b) A−1 .
Exercícios usando o Matlabr
Comandos do Matlabr
>> det(A) calcula o determinante da matriz A.
Comandos do pacote GAAL
>> detopelp(A) calcula o determinante de A aplicando operações elementares até que a matriz esteja na forma
triangular superior.
2.2.13 Vamos fazer uma experiência no Matlabr para tentar ter uma ideia do quão comum é encontrar matrizes
invertíveis. No prompt do Matlabr digite a seguinte linha:
>> c=0; for n=1:1000,A=randi(2); if(det(A) =0),c=c+1;end,end,c
(não se esqueça das vírgulas e dos pontos e vírgulas!). O que esta linha está mandando o Matlabr fazer é o
seguinte:
• criar um contador c e atribuir a ele o valor zero;
• atribuir à variável A, 1000 matrizes 2 × 2 com entradas inteiras aleatórias entre −5 e 5;
• se det(A) 6= 0, então o contador c é acrescido de 1;
• no final o valor existente na variável c é escrito.
Qual a conclusão que você tira do valor obtido na variável c?
2.2.14 Resolva, com o Matlabr , os Exercícios Numéricos a partir do Exercício 2.2.5.
Exercícios Teóricos
2.2.15 Mostre que se det(AB) = 0, então A é singular ou B é singular.
2.2.16 O determinante de AB é igual ao determinante de BA? Justifique.
2.2.17 Mostre que se A é uma matriz não singular tal que A2 = A, então det(A) = 1.
2.2.18 Mostre que se Ak = 0, para algum k inteiro positivo, então A é singular.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
50
Capítulo 2. Inversão de Matrizes e Determinantes
2.2.19 Mostre que se AT = A−1 , então det(A) = ±1.
2.2.20 Mostre que se α é um escalar e A é uma matriz n × n, então det(αA) = αn det(A).
2.2.21 Mostre que A, n × n, é invertível se, e somente se, AT A é invertível.
2.2.22 Sejam A e P matrizes n × n, sendo P invertível. Mostre que det(P −1 AP ) = det(A).
2.2.23 Mostre que se uma matriz A = (aij )n×n é triangular superior, (isto é, os elementos situados abaixo da
"
#
diagonal são iguais a zero) então
a b det(A) = a11 a22 . . . ann .
(a) Mostre que se A =
, então det(A) = 0 se, e somente se, uma linha é múltiplo escalar da outra
c d
2.2.24
ou A tem uma linha nula. E se A for uma matriz n × n?
(b) Mostre que se uma linha Ai de uma matriz A = (aij )n×n é tal que Ai = αAk + βAℓ , para α e β escalares
e i 6= k, ℓ, então det(A) = 0.
P
(c) Mostre que se uma linha Ai de uma matriz A = (aij )n×n é tal que Ai =
αk Ak , para αk , k =
k6=i
1, . . . , i − 1, i + 1, . . . , n escalares, então det(A) = 0.
2.2.25 Mostre que o determinante de Vandermonde é dado
1 x1 x21 · · ·
1 x2 x2 · · ·
2
Vn = det
..
..
..
.
.
.
1 xn x2n · · ·
por
xn−1
1
xn−1
2
..
.
xn−1
n
Y
=
(xi − xj ).
i>j
A expressão à direita significa o produto de todos os termos xi − xj tais que i > j e i, j = 1, . . . , n. (Sugestão:
mostre primeiro que V3 = (x3 − x2 )(x2 − x1 )(x3 − x1 ). Suponha que o resultado é verdadeiro para matrizes de
Vandermonde de ordem n − 1 e mostre que o resultado é verdadeiro para matrizes de Vandermonde de ordem
n. Faça as seguintes operações nas colunas da matriz, −x1 Ci−1 + Ci −→ Ci , para i = n, . . . , 2. Obtenha
Vn = (xn − xn−1 ) . . . (x2 − x1 ).)
2.2.26 Sejam A, B e D matrizes p × p, p × (n − p) e (n − p) × (n − p), respectivamente. Mostre que
"
#
A B
det
= det(A) det(D).
0 D
(Sugestão: o resultado é claramente verdadeiro para n = 2. Suponha que o resultado seja verdadeiro para
matrizes de ordem n − 1. Desenvolva o determinante da matriz em termos da 1a coluna, escreva o resultado
em termos de determinantes de ordem n − 1 e mostre que o resultado é verdadeiro para matrizes de ordem n.)
2.2.27 Seja A uma matriz n × n.
(a) Prove que det(adj(A)) = [det(A)]n−1 . (Sugestão: separe em dois casos, det(A) = 0 e det(A) 6= 0, e use o
Teorema 2.12 na página 46.)
(b) Prove que se A é invertível e n ≥ 2, então adj(adj(A)) = det(A)n−2 A.
2.2.28 Dê um exemplo de um sistema linear de 3 equações e 3 incógnitas, AX = B, em que det(A) = det(A1 ) =
det(A2 ) = det(A3 ) = 0 e o sistema não tenha solução, em que Aj é a matriz que se obtém de A substituindo-se
a sua j-ésima coluna por B, para j = 1, 2, 3.
Apêndice II: Demonstração do Teorema 2.9 na página 42
Lema 2.2 Sejam E1 = [1 0 . . . 0]T , E2 = [0 1 0 . . . 0]T , . . . , En = [0 . . . 0 1]T . Se A é uma matriz n × n, cuja
i-ésima linha é igual a EkT , para algum k (1 ≤ k ≤ n), então
eik ).
det(A) = (−1)i+k det(A
Demonstração:
É fácil ver que para matrizes 2 × 2 o lema é verdadeiro. Suponha que ele seja verdadeiro para matrizes (n − 1) ×
(n − 1) e vamos provar que ele é verdadeiro para matrizes n × n. Podemos supor que 1 < i ≤ n.
Seja Bj a matriz (n − 2) × (n − 2) obtida de A eliminando-se as linhas 1 e i e as colunas j e k, para 1 ≤ j ≤ n.
e1j é uma matriz (n − 1) × (n − 1) cuja (i − 1)-ésima linha é igual a E T . Para j > k,
Para j < k, a matriz A
k−1
e
a matriz A1j é uma matriz (n − 1) × (n − 1) cuja (i − 1)-ésima linha é igual a EkT . Como estamos supondo o lema
e1k ) = 0, segue que
verdadeiro para estas matrizes e como pelo Corolário 2.8.1 na página 42 det(A
(i−1)+(k−1) det(B )
se j < k
j
(−1)
e
(2.2.7)
det(A1j ) =
0
se j = k
(−1)(i−1)+k det(Bj )
se j > k
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
51
Capítulo 2. Inversão de Matrizes e Determinantes
Usando (2.2.7), obtemos
det(A)
=
n
X
j=1
=
n
X
eij )
(−1)1+j a1j det(A
(−1)1+j a1j (−1)(i−1)+(k−1) det(Bj ) +
j<k
n
X
(−1)1+j a1j (−1)(i−1)+k det(Bj ).
j>k
Por outro lado, temos que
i+k
(−1)
eik ) = (−1)i+k
det(A
n
X
1+j
(−1)
a1j det(Bj ) +
j<k
n
X
1+(j−1)
(−1)
j>k
É simples a verificação de que as duas expressões acima são iguais.
a1j det(Bj ) .
Demonstração do Teorema 2.9 na página 42. Sejam E1 = [1 0 . . . 0]T , E2 = [0 1 0 . . . 0]T , . . . , En =
P
T
[0 . . . 0 1]T . Observe que a linha i de A pode ser escrita como Ai = n
j=1 aij Ej . Seja Bj a matriz obtida de A
substituindo-se a linha i por EjT . Pelo Teorema 2.8 na página 41 e o Lema 2.2, segue que
det(A) =
n
X
aij det(Bj ) =
j=1
n
X
eij ).
(−1)i+j aij det(A
j=1
Teste do Capítulo
1. Calcule o determinante da matriz seguinte usando
triangular superior.
1
2
0
4
2. Se possível, encontre a inversa da seguinte matriz:
1
0
0
2
operações elementares para transformá-la em uma matriz
3
3
3
6
9
2
4
9
7
5
1
1
0
1
0
0
0
0
1
0
2
0
0
2
.
3. Encontre todos os valores de λ para os quais a matriz A − λI4 tem inversa, em que
2 0
0 0
2 0
0 0
A=
.
1 2
1 0
3 2 −1 2
4. Responda Verdadeiro ou Falso, justificando:
(a) Se A2 = −2A4 , então (In + A2 )−1 = In − 2A2 .
(b) Se AT = −A2 e A é não singular, então o determinante de A é igual a −1.
(c) Se B = AAT A−1 , então det(A) = det(B).
(d) det(A + B) = det(A) + det(B).
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
Capítulo 3
Espaços R2 e R3
3.1
Vectores no Plano e no Espaço
Muitas grandezas físicas, como a velocidade, a força o deslocamento e o impulso, para serem completamente
identificadas, além da magnitude, precisam da direcção e do sentido. Estas grandezas são chamadas grandezas
vectoriais ou simplesmente vectores.
Geometricamente, os vectores são representados por segmentos (de rectas) orientadas (segmentos de rectas
com um sentido de percurso) no plano ou no espaço. A ponta da seta do segmento orientado é chamada ponto final
ou extremidade e o outro extremo é chamado ponto inicial ou origem do segmento orientado. A direcção e o
sentido do segmento identifica a direcção e o sentido do vector. O comprimento do segmento orientado representa a
magnitude do vector.
Um vector pode ser representado por vários segmentos orientados. Este facto é análogo ao que ocorre com os
números racionais e as fracções. Duas fracções representam o mesmo número racional se o numerador e o denominador
de cada uma delas estiverem na mesma proporção. Por exemplo, as fracções 1/2, 2/4 e 3/6 representam o mesmo
número racional. De forma análoga, dizemos que dois segmentos orientados representam o mesmo vector se possuem o
mesmo comprimento, a mesma direcção e o mesmo sentido. A definição de igualdade de vectores também é análoga
à igualdade de números racionais. Dois números racionais a/b e c/d são iguais quando ad = bc. Analogamente,
dizemos que dois vectores são iguais se eles possuem o mesmo comprimento, a mesma direcção e o mesmo sentido.
Na Figura 3.1 temos 4 segmentos orientados, com origens em pontos diferentes, que representam o mesmo
vector, ou seja, são considerados como vectores iguais, pois possuem a mesma direcção, o mesmo sentido e o mesmo
comprimento.
Figura 3.1:
Segmentos orientados representando o mesmo vector
−
Se o ponto inicial de um representante de um vector →
v é A e o ponto final é B, então escrevemos
bB
−→
→
−
v = AB
Ab
3.1.1
Soma de Vectores e Multiplicação por um Escalar
−
−
−
−
A soma, →
v +→
w , de dois vectores →
v e→
w é determinada da seguinte forma:
52
53
Capítulo 3. Espaços R2 e R3
−
• tome um segmento orientado que representa →
v;
→
−
−
• tome um segmento orientado que representa w , com origem na extremidade de →
v;
→
−
→
−
→
−
−
• o vector v + w é representado pelo segmento orientado que vai da origem de v até a extremidade de →
w.
Da Figura 3.2, deduzimos que a soma de vectores é comutativa, ou seja,
→
−
−
−
−
v +→
w = →
w +→
v,
(3.1.1)
→
−
→
−
−
−
para quaisquer vectores v e w . Observamos também que a soma →
v +→
w está na diagonal do paralelogramo
−
−
determinado por →
v e→
w , quando estão representados com a mesma origem.
→
−
w
−w
→
−v +
→
−v
→
−w +
→
→
−
v
→
−
v
→
−
w
Figura 3.2:
→
−
−
−
−
v +→
w =→
w +→
v
Da Figura 3.3, deduzimos que a soma de vectores é associativa, ou seja,
−
→
−
−
−
→
−
−
v + →
w +→
u
=
v +→
w +→
u,
→
−
→
−
→
−
para quaisquer v , w e u .
(3.1.2)
→
−
w
−v +
→
→
−
v
Figura 3.3:
→
−
w+→
−
u
−w
→
→
−
u
−
u
− +→
→
−
v + w)
(→
−
− +→
→
u)
−
→
v + (w
→
−
−
−
−
−
−
v + (→
w +→
u ) = (→
v +→
w) + →
u
→
−
O vector que tem a sa origem coincidindo com a sua extremidade é chamado vector nulo e denotado por 0 .
Segue então que
→
−
→
−
→
−
−
−
v + 0
=
0 +→
v =→
v,
(3.1.3)
→
−
para todo o vector v .
−
−
−
Para qualquer vector →
v , o simétrico de →
v , denotado por −→
v , é o vector que tem o mesmo comprimento, a
→
−
mesma direcção mas sentido contrário ao de v . Segue então que
−
−
Definimos a diferença →
w menos →
v , por
→
−
−
v + (−→
v)
=
→
−
0.
(3.1.4)
→
−
−
−
−
w −→
v =→
w + (−→
v ).
Segue desta definição, de (3.1.1), (3.1.2), (3.1.3) e de (3.1.3), que
→
−
→
−
−
−
−
−
−
−
−
−
−
−
w + (→
v −→
w ) = (→
v −→
w) + →
w =→
v + (−→
w +→
w) = →
v + 0 =→
v.
→
−
→
−
→
−
→
−
−
Assim, a diferença v − w é um vector que somado a w dá v . Portanto, ele vai da extremidade de →
w até à
→
−
→
−
→
−
extremidade de v , desde que v e w estejam representados por segmentos orientados com a mesma origem.
→
−
−
v −→
w
−
−→
w
Introdução à Álgebra Linear
→
−
v
→
−
−
v −→
w
→
−
v
→
−
w
Opto, Qui Ind, Mat
→
−
w
2007/2008
54
Capítulo 3. Espaços R2 e R3
Figura 3.4:
−
−
A diferença →
v −→
w
−
−
A multiplicação de um vector →
v por um escalar α, α→
v , é determinada pelo vector que possui as seguintes
características:
→
−
−
(a) é o vector nulo se α = 0 ou →
v = 0,
(b) caso contrário.
−
i. tem comprimento |α| vezes o comprimento de →
v,
→
−
ii. a direcção é a mesma de v (neste caso, dizemos que eles são paralelos),
−
−
iii. tem o mesmo sentido de →
v se α > 0 e tem o sentido contrário ao de →
v se α < 0.
→
−
v
−
3→
v
−
−2→
v
−
1→
v
2
Figura 3.5:
Multiplicação de um vector por um escalar
−
−
−
As propriedades da multiplicação por um escalar serão apresentadas mais à frente. Se →
w = α→
v , dizemos que →
w
→
−
é um múltiplo escalar de v . É fácil ver que dois vectores não nulos são paralelos (ou colineares) se, e somente
se, um é um múltiplo escalar do outro.
As operações com vectores podem ser definidas utilizando um sistema de coordenadas rectangulares. Em
primeiro lugar, vamos considerar os vectores no plano.
−
−
Seja →
v um vector no plano. Definimos as componentes de →
v como sendo as coordenadas (v1 , v2 ) do ponto
→
−
final do representante de v que tem o ponto inicial na origem. Escrevemos simplesmente
→
−
v = (v1 , v2 ).
y
→
−
v = (v1 , v2 )
v2
v1
O
Figura 3.6:
x
−
As componentes do vector →
v no plano
−
−
→
Assim, as coordenadas de um ponto P são iguais às componentes do vector OP , que vai da origem do sistema de
→
−
coordenadas ao ponto P . Em particular, o vector nulo é 0 = (0, 0). Em termos das componentes, podemos realizar
facilmente as operações: soma de vectores e multiplicação de um vector por escalar.
y
P (x1 , y1 )
y1
−
−
→
OP
O
Figura 3.7:
Introdução à Álgebra Linear
x1
x
−
−
→
As componentes de P são iguais às componentes de OP
Opto, Qui Ind, Mat
2007/2008
55
Capítulo 3. Espaços R2 e R3
−
−
• Como ilustrado na Figura 3.8, a soma de dois vectores →
v = (v1 , v2 ) e →
w = (w1 , w2 ) é dada por
→
−
−
v +→
w = (v1 + w1 , v2 + w2 ).
y
→
−
−
v +→
w
v2 + w2
w2
v2
→
−
v
→
−
w
w2
v1
v1
Figura 3.8:
w1
v1 + w1
x
A soma de dois vectores no plano
−
• Como ilustrado na Figura 3.9, a multiplicação de um vector →
v por um escalar α é dada por
−
α→
v = (αv1 , αv2 ).
y
−
α→
v
αv2
→
−
v
v2
v1
Figura 3.9:
αv1
x
A multiplicação de um vector por um escalar no plano
Definimos as componentes de um vector no espaço de forma análoga a que fizemos com os vectores no
plano. Vamos inicialmente introduzir um sistema de coordenadas rectangulares no espaço. Para isto, escolhemos
um ponto como origem O e como eixos coordenados, três rectas orientadas (com o sentido de percurso definido),
passando pela origem, perpendiculares entre si. Estes serão os eixos x, y e z. O eixo z é o eixo vertical. Os eixos
x e y são horizontais e satisfazem a seguinte propriedade. Suponha que giramos o eixo x pelo menor ângulo até
que coincida com o eixo y. Se os dedos da mão direita apontam na direcção do semi-eixo x positivo de forma que
o semi-eixo y positivo esteja do lado da palma da mão, então o polegar aponta no sentido do semi-eixo z positivo.
Cada par de eixos determina um plano chamado plano coordenado. Portanto, os três planos coordenados são:
xy, yz e xz.
A cada ponto P no espaço associamos um termo de números (x, y, z), chamado coordenadas do ponto P ,
como segue.
z
z
z1
P (x1 , y1 , z1 )
P (x1 , y1 , z1 )
b
b
z1
x1
x1
y1
y
x
Figura 3.10:
′
bP
x
y1
y
As coordenadas de um ponto no espaço
• Passe três planos por P paralelos aos planos coordenados.
• A intersecção do plano paralelo ao plano xy, passando por P , com o eixo z determina a coordenada z.
• A intersecção do plano paralelo ao plano xz, passando por P , com o eixo y determina a coordenada y.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
56
Capítulo 3. Espaços R2 e R3
• A intersecção do plano paralelo ao plano yz, passando por P , com o eixo x determina a coordenada x.
Alternativamente, podemos encontrar as coordenadas de um ponto P como segue.
• Trace uma recta paralela ao eixo z, passando por P .
• A intersecção desta recta com o plano xy é o ponto P ′ . As coordenadas de P ′ , (x, y), no sistema de coordenadas
xy são as duas primeiras coordenadas de P .
• A terceira coordenada é igual ao comprimento do segmento P P ′ , se P estiver acima do plano xy e ao comprimento do segmento P P ′ com o sinal negativo, se P estiver abaixo do plano xy.
Agora, estamos prontos para utilizarmos um sistema de coordenadas cartesianas também nas operações de
−
vectores no espaço. Seja →
v um vector no espaço. Como no caso de vectores no plano, definimos as componentes de
→
−
−
v como sendo as coordenadas (v1 , v2 , v3 ) do ponto final do representante de →
v que tem o ponto inicial na origem.
Escrevemos simplesmente
→
−
v = (v , v , v ).
1
2
3
z
v3
→
−
v = (v1 , v2 , v3 )
b
v1
v2
y
x
Figura 3.11:
As coordenadas de um vector no espaço
−
−
→
Assim, as coordenadas de um ponto P são iguais às componentes do vector OP que vai da origem do sistema
→
−
de coordenadas ao ponto P . Em particular, o vector nulo é 0 = (0, 0, 0). Assim como fizemos para os vectores
no plano, para os vectores no espaço a soma de vectores e a multiplicação de um vector por um escalar podem ser
realizadas em termos das componentes.
z
z1
P (x1 , y1 , z1 )
b
−
−→
OP
x1
O
y1
y
x
Figura 3.12:
−
−
→
As coordenadas de P são iguais às componentes de OP
−
−
−
−
• Se →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ), então a adição de →
v com →
w é dada por
→
−
−
v +→
w = (v1 + w1 , v2 + w2 , v3 + w3 ).
−
−
• Se →
v = (v1 , v2 , v3 ) e α é um escalar, então a multiplicação de →
v por α é dada por
−
α→
v = (αv1 , αv2 , αv3 ).
−
−
Exemplo 3.1 Se →
v = (1, −2, 3) e →
w = (2, 4, −1), então
→
−
−
v +→
w = (1 + 2, −2 + 4, 3 + (−1)) = (3, 2, 2),
Introdução à Álgebra Linear
−
3→
v = (3 · 1, 3 · (−2), 3 · 3) = (3, −6, 9).
Opto, Qui Ind, Mat
2007/2008
57
Capítulo 3. Espaços R2 e R3
−
Quando um vector →
v está representado por um segmento orientado com ponto inicial fora da origem (Figura
−
3.13), digamos em P (x1 , y1 , z1 ), e o ponto final em Q(x2 , y2 , z2 ), então as componentes do vector →
v são dadas por
−
−
→ −
−
→ −
−
→
→
−
v = P Q = OQ − OP = (x2 − x1 , y2 − y1 , z2 − z1 ).
−
Portanto, as componentes de →
v são obtidas subtraindo-se as coordenadas do ponto Q (extremidade) das do
ponto P (origem). O mesmo se aplica a vectores no plano.
z
Q
→
−
v
P
O
y
x
Figura 3.13:
−
−
→ −
−
→
→
−
v = OQ − OP
−
Exemplo 3.2 As componentes do vector →
v que tem um representante com ponto inicial P (5/2, 1, 2) e ponto final
Q(0, 5/2, 5/2) são dadas por
−
−
→
→
−
v = P Q = (0 − 5/2, 5/2 − 1, 5/2 − 2) = (−5/2, 3/2, 1/2).
Observação 3.1 O vector é “livre”, ele não tem posição fixa, ao contrário do ponto e do segmento orientado. Por
−
exemplo, o vector →
v = (−5/2, 3/2, 1/2), no exemplo acima, estava representado por um segmento orientado com a
origem no ponto P (5/2, 1, 2). Mas poderia ser representado por um segmento orientado cujo ponto inicial poderia
estar em qualquer outro ponto.
−
Um vector no espaço →
v pode também ser escrito na notação matricial como uma matriz linha ou como uma
matriz coluna:
v1
h
i
→
−
v = v2
ou
v1 v2 v3 .
v3
Estas notações podem ser justificadas pelo facto de que as operações matriciais
v1
w1
v1 + w1
v1
αv1
→
−
−
−
v +→
w = v2 + w2 = v2 + w2 ,
α→
v = α v2 = αv2
v3
w3
v3 + w3
v3
αv3
ou
h
i h
i h
i
→
−
−
v +→
w = v1 v2 v3 + w1 w2 w3 = v1 + w1 v2 + w2 v3 + w3 ,
h
i h
i
−
α→
v = α v1 v2 v3 = αv1 αv2 αv3
produzem os mesmos resultados que as operações vectoriais
→
−
−
v +→
w = (v1 , v2 , v3 ) + (w1 , w2 , w3 ) = (v1 + w1 , v2 + w2 , v3 + w3 ),
−
α→
v = α(v , v , v ) = (αv , αv , αv ).
1
2
3
1
2
3
O mesmo vale, naturalmente, para vectores no plano.
No teorema seguinte enunciamos as propriedades mais importantes da soma de vectores e da multiplicação de
vectores por um escalar.
−
−
−
Teorema 3.1 Sejam →
u ,→
v e→
w vectores e α e β escalares. São válidas as seguintes propriedades:
−
−
−
−
(a) →
u +→
v =→
v +→
u
−
−
(e) α(β →
v ) = (αβ)→
v
−
−
−
−
−
−
(b) (→
u +→
v)+→
w =→
u + (→
v +→
w)
→
−
−
−
(c) →
u + 0 =→
u
→
−
−
−
(d) →
u + (−→
u)= 0
−
−
−
−
(f ) α(→
u +→
v ) = α→
u + α→
v
Introdução à Álgebra Linear
−
−
−
(g) (α + β)→
u = α→
u + β→
u
−
−
(h) 1→
u =→
u
Opto, Qui Ind, Mat
2007/2008
58
Capítulo 3. Espaços R2 e R3
Demonstração:
Segue directamente das propriedades da álgebra matricial (Teorema 1.1 na página 3).
Exemplo 3.3 Vamos usar vectores e as suas propriedades para provar um resultado conhecido de geometria plana.
Seja um triângulo ABC e sejam M e N os pontos médios de AC e BC, respectivamente. Vamos provar que M N
é paralelo a AB e tem comprimento igual à metade do comprimento de AB.
Queremos provar que
1 −→
−−→
C
M N = AB.
2
A partir da figura ao lado, temos que
−−→ −−→ −−→
M N = M C + CN .
M
N
Como M é o ponto médio de AC e N é o ponto médio de BC, então
1 −→
−−→
M C = AC
2
Logo
e
1−
−−→
−
→
CN = CB.
2
A
B
1 −→ 1 −
1 −→ −
1 −→
−−→
−
→
−
→
M N = AC + CB = (AC + CB) = AB.
2
2
2
2
−−→
−→
−−→
Exemplo 3.4 Dados quatro pontos A, B, C e X tais que AX = λAB, vamos escrever CX como uma soma de
−→ −
−
→
−→ −
−
→
−−→
−→
múltiplos escalares de CA e CB, que é chamada combinação linear de CA e CB. Como AX = λAB, então os
−−→ −→
vectores AX e AB são paralelos e portanto o ponto X só pode estar na recta definida por A e B. Vamos desenhá-lo
entre A e B, mas isto não vai representar nenhuma restrição.
O vector que vai de C para X pode ser escrito
como uma soma de um vector que vai de C para
A com um vector que vai de A para X,
−−→ −→ −−→
CX = CA + AX.
A
b
−−→
−→
Agora, por hipótese, AX = λAB, o que implica
−−→
−→
−→
−→
−
−
→ −→
que CX = CA + λAB. Mas AB = CB − CA,
b
−−→ −→
−
−
→ −→
portanto CX = CA + λ(CB − CA). Logo
C
−−→
−→
−
−
→
CX = (1 − λ)CA + λCB.
−−→ −→
−−→ −
−
→
−−→
Observe que para λ = 0, CX = CA, para λ = 1, CX = CB, para λ = 1/2, CX =
−−→
−→
−
−
→
CX = 23 CA + 13 CB.
bX
b
B
−
−
→
1 −→
CA + 12 CB
2
e para λ = 1/3,
Exemplo 3.5 Vamos
que o ponto médio de um segmento que une os pontos A(x1 , y1 , z1 )
mostrar, usando vectores,
2 , y1 +y2 , z1 +z2 .
e B(x2 , y2 , z2 ) é M x1 +x
2
2
2
−−→
−→
O ponto M é o ponto médio de AB se, e somente se, AM = 12 AB. Então, aplicando o exemplo ante−−→
−
→
−
−
→
rior (com o ponto C sendo a origem O), OM = 12 OA + 12 OB. Como as coordenadas de um ponto são iguais
−−→
às componentes do vector que vai da origem até àquele ponto, segue que OM = 21 (x1 , y1 , z1 ) + 21 (x2 , y2 , z2 ) e
x 1 + x 2 y1 + y2 z 1 + z 2
M
,
,
.
2
2
2
3.1.2
Norma e Produto Escalar
Já vimos que o comprimento de um vector é definido como sendo o comprimento de qualquer um dos segmentos
−
−
orientados que o representam. O comprimento do vector →
v também é chamado norma de →
v e é denotado(a) por
→
−
k v k. Segue do Teorema de Pitágoras que a norma de um vector é dada por
q
−
k→
v k = v12 + v22 ,
−
no caso em que →
v = (v1 , v2 ) é um vector no plano, e por
q
−
k→
v k = v12 + v22 + v32 ,
−
no caso em que →
v = (v1 , v2 , v3 ) é um vector no espaço (verifique usando as Figuras 3.14 e 3.15).
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
59
Capítulo 3. Espaços R2 e R3
z
v3
y
→
−
v = (v1 , v2 , v3 )
→
−
v = (v1 , v2 )
−
k→
vk
−
k→
vk
v2
v2
v1
y
v1
x
x
Figura 3.14:
−
A norma de um vector →
v
no plano
Figura 3.15:
−
A norma de um vector →
v
no espaço
Um vector de norma igual a 1 é chamado vector unitário.
−
−
→
A distância entre dois pontos P (x1 , y1 , z1 ) e Q(x2 , y2 , z2 ) é igual à norma do vector P Q (Figura 3.13 na
−
−
→ −
−
→ −
−
→
página 57). Como P Q = OQ − OP = (x2 − x1 , y2 − y1 , z2 − z1 ), então a distância de P a Q é dada por
−
−
→
dist(P, Q) = kP Qk =
q
(x2 − x1 )2 + (y2 − y1 )2 + (z2 − z1 )2 .
−
−
→
Analogamente, a distância entre dois pontos P (x1 , y1 ) e Q(x2 , y2 ) no plano é igual à norma do vector P Q,
que é dada por
q
−
−
→
dist(P, Q) = kP Qk = (x2 − x1 )2 + (y2 − y1 )2 .
−
Exemplo 3.6 A norma do vector →
v = (1, −2, 3) é
q
√
−
k→
v k = 12 + (−2)2 + 32 = 14.
A distância entre os pontos P (2, −3, 1) e Q(−1, 4, 5) é
−
−
→
dist(P, Q) = kP Qk = k(−1 − 2, 4 − (−3), 5 − 1)k = k(−3, 7, 4)k =
q
(−3)2 + 72 + 42 =
√
74.
−
Se →
v = (v1 , v2 , v3 ) e α é um escalar, então da definição da multiplicação de um vector por um escalar e da
norma de um vector, segue que
q
q
−
kα→
v k = k(αv1 , αv2 , αv3 )k = (αv1 )2 + (αv2 )2 + (αv3 )2 = α2 (v12 + v22 + v32 ),
ou seja,
−
−
kα→
v k = |α|k→
v k.
(3.1.5)
−
Dado um vector →
v não nulo, o vector
→
−
u =
1
−
k→
vk
→
−
v
→
−
v = →
,
−
kvk
−
é um vector unitário na direcção de →
v , pois, por (3.1.5), temos que
1 →
−
k−
k→
u k = →
v k = 1.
−
k v k
−
Exemplo 3.7 Um vector unitário na direcção do vector →
v = (1, −2, 3) é o vector
1
1
1
−2
3
→
−
→
−
u =
v = √
(1, −2, 3) = ( √ , √ , √ ).
−
k→
vk
14
14
14
14
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
60
Capítulo 3. Espaços R2 e R3
−
−
−
−
O ângulo entre dois vectores não nulos, →
v e→
w , é definido pelo ângulo θ determinado por →
v e→
w que satisfaz
0 ≤ θ ≤ π, quando eles estão representados com a mesma origem.
−
−
−
−
Quando o ângulo θ entre dois vectores não nulos →
v e→
w é recto (θ = 90o ), dizemos que os vectores →
v e→
w são
ortogonais ou perpendiculares entre si.
Vamos definir, agora, um produto entre dois vectores, cujo resultado é um escalar. Por isso é chamado produto
escalar. Este produto tem aplicação, por exemplo, em Física: o trabalho realizado por uma força é o produto escalar
do vector força pelo vector deslocamento, quando a força aplicada é constante.
Definição 3.1 O produto escalar ou interno de dois vectores é definido por
(
−
−
0,
se →
v e→
w é o vector nulo,
→
−
−
v →
w =
→
−
→
−
k v kk w k cos θ,
caso contrário,
em que θ é o ângulo entre eles.
Quando os vectores são dados em termos das suas componentes, não sabemos directamente o ângulo entre eles.
Por isso, precisamos de uma forma de calcular o produto escalar que não necessite do ângulo entre os vectores.
−
−
Se →
v e→
w são dois vectores não nulos e θ é o ângulo entre eles, então pela lei dos cossenos,
−
−
−
−
−
−
k→
v −→
w k2 = k→
v k2 + k→
w k2 − 2k→
v kk→
w k cos θ.
Assim,
1 →
−
−
−
→
−
−
−
−
k−
v k2 + k→
w k2 − k→
v −→
w k2 .
v →
w = k→
v kk→
w k cos θ =
2
(3.1.6)
Já temos então uma fórmula para calcular o produto escalar que não depende directamente do ângulo entre
eles. Substituindo-se as coordenadas dos vectores em (3.1.6), obtemos uma expressão mais simples para o cálculo do
produto interno.
−
−
−
Por exemplo, se →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ) são vectores no espaço, então substituindo-se k→
v k2 =
−
−
−
v12 + v22 + v32 , k→
w k2 = w12 + w22 + w32 e k→
v −→
w k2 = (v1 − w1 )2 + (v2 − w2 )2 + (v3 − w3 )2 em (3.1.6), os termos vi2
e wi2 são cancelados e obtemos
→
−
−
v →
w = v1 w1 + v2 w2 + v3 w3 .
−
−
Teorema 3.2 O produto escalar ou interno, →
v →
w , entre dois vectores é dado por
→
−
−
v →
w = v1 w1 + v2 w2 ,
−
−
se →
v = (v1 , v2 ) e →
w = (w1 , w2 ) são vectores no plano e por
→
−
−
v →
w = v1 w1 + v2 w2 + v3 w3 ,
−
−
se →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ) são vectores no espaço.
−
−
−
−
Exemplo 3.8 Sejam →
v = (0, 1, 0) e →
w = (2, 2, 3). O produto escalar de →
v por →
w é
→
−
−
v →
w = 0 · 2 + 1 · 2 + 0 · 3 = 2.
−
−
Podemos usar o Teorema 3.2 para determinar o ângulo entre dois vectores não nulos, →
v e →
w . O cosseno do
→
−
→
−
ângulo entre v e w é, então, dado por
→
−
−
v →
w
cos θ = →
.
−
−
k v kk→
wk
−
−
Se →
v e→
w são dois vectores não nulos e θ é o ângulo entre eles, então
−
−
(a) θ é agudo (0 ≤ θ < 90o ) se, e somente se, →
v →
w > 0,
−
−
(b) θ é recto (θ = 90o ), se, e somente se, →
v →
w =0e
−
−
(c) θ é obtuso (90o < θ ≤ 180o ), se, e somente se, →
v →
w < 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
61
Capítulo 3. Espaços R2 e R3
−
Exemplo 3.9 Vamos determinar o ângulo entre uma diagonal de um cubo e uma de suas arestas. Sejam →
v1 =
→
−
→
−
→
−
(1, 0, 0), v 2 = (0, 1, 0) e v 3 = (0, 0, 1) (Figura 3.18). Uma diagonal do cubo é representada pelo vector d dado por
→
−
−
−
−
d =→
v1 +→
v2+→
v 3 = (1, 1, 1).
→
− →
−
Então, o ângulo entre d e v 1 satisfaz
→
− →
1·1+0·1+0·1
d −
v1
1
cos θ = →
= √
√
= √ ,
− →
−
2 + 12 + 12 )( 12 + 02 + 02 )
(
1
3
k d kk v 1 k
ou seja,
1
θ = arccos( √ ) ≈ 54o .
3
z
(0, 0, 1)
(1, 1, 1)
(0, 1, 0)
y
(1, 0, 0)
x
Figura 3.18:
Ângulo entre a diagonal de um cubo e uma de suas arestas
−
−
−
Teorema 3.3 Sejam →
u ,→
v e→
w vectores e α um escalar. São válidas as seguintes propriedades:
−
−
−
−
(a) (comutatividade) →
u →
v =→
v →
u;
−
−
−
−
−
−
−
(b) (distributividade) →
u (→
v +→
w) = →
u →
v +→
u →
w;
→
−
→
−
→
−
→
−
→
−
−
(c) (associatividade) α( u v ) = (α u ) v = u (α→
v );
−
−
−
−
−
−
−
(d) →
v →
v = k→
v k2 ≥ 0, para todo →
v e→
v →
v = 0 se, e somente se, →
v = 0.
Demonstração:
−
−
−
Sejam →
u = (u1 , u2 , u3 ), →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ).
→
−
→
−
−
−
(a) u v = u v + u v + u v = v u + v u + v u = →
v →
u;
1 1
2 2
3 3
1 1
2 2
3 3
−
−
−
(b) →
u (→
v +→
w ) = (u1 , u2 , u3 ) (v1 + w1 , v2 + w2 , v3 + w3 ) = u1 (v1 + w1 ) + u2 (v2 + w2 ) + u3 (v3 + w3 ) =
−
−
−
−
(u1 v1 + u1 w1 ) + (u2 v2 + u2 w2 ) + (u3 v3 + u3 w3 ) = (u1 v1 + u2 v2 + u3 v3 ) + (u1 w1 + u2 w2 + u3 w3 ) = →
u →
v +→
u →
w;
→
−
→
−
→
−
→
−
(c) α( u v ) = α(u1 v1 + u2 v2 + u3 v3 ) = (αu1 )v1 + (αu2 )v2 + (αu3 )v3 = (α u ) v ;
−
−
−
(d) →
v →
v = k→
v k2 é uma soma de quadrados e por isso é sempre maior ou igual a zero; e é zero se, e somente se,
todas as parcelas são iguais a zero.
Projecção Ortogonal
−
−
−
−
−
Podemos decompor um →
v em uma soma de dois vectores, →
v1 e →
v 2 , sendo →
v 1 na direcção de um vector →
w e
→
−
→
−
v 2 perpendicular a w (Figura 3.19).
−
−
−
→
−
−
O vector →
v 1 é chamado projecção ortogonal de →
v sobre →
w e é denotado por proj→
w v.
→
−
v
→
−
v2
→
−
v1
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
→
−
w
2007/2008
62
Capítulo 3. Espaços R2 e R3
Figura 3.19:
−
−
−
Decomposição de →
v em uma soma →
v1+→
v 2,
→
−
→
−
em que v 1 é paralelo a w .
−
−
−
Teorema 3.4 Seja →
w um vector não nulo. Então, a projecção de um vector →
v em →
w é dada por
→
−
→
−
v
w
→
−
→
−
−
w.
proj→
w v =
−
k→
w k2
Demonstração:
−
→
− →
−
→
−
→
−
→
−
→
−
→
−
→
−
−
−
Sejam →
v 1 = proj→
w v e v 2 = v − proj→
w v . Como v 1 é paralelo a w , então v 1 = α w . Assim,
→
−
→
−
→
−
→
−
→
−
v = v 1 + v 2 = α w + v 2.
→
−
→
−
Multiplicando-se escalarmente v por w e usando o Teorema 3.3 (d), obtemos
→
−
−
−
−
−
v →
w = αk→
w k2 + →
v 2 →
w.
→
−
→
−
→
−
→
−
Mas v 2 é perpendicular a w , então v 2 w = 0. Portanto, de (3.1.7) obtemos
→
−
−
v →
w
α= →
.
k−
w k2
(3.1.7)
−
−
−
−
−
Exemplo 3.10 Sejam →
v = (2, −1, 3) e →
w = (4, −1, 2). Vamos encontrar dois vectores →
v1 e →
v 2 tais que →
v =
→
−
→
−
→
−
→
−
→
−
→
−
v 1 + v 2 , v 1 é paralelo a w e v 2 é perpendicular a w . Temos que
→
−
−
v →
w = 2 · 4 + (−1) · (−1) + 3 · 2 = 15
−
k→
w k2 = 42 + (−1)2 + 22 = 21.
Assim,
3.1.3
15
21
20
5 10
,− ,
)
7
7 7
20
5 10
6
2 11
→
−
−
−
v2=→
v −→
v 1 = (2, −1, 3) − ( , − ,
) = (− , − ,
).
7
7 7
7
7 7
→
−
→
−
−
v 1 = proj→
w v =
(4, −1, 2) = (
Produto Vectorial
Vamos, agora, definir um produto entre dois vectores, cujo resultado é um vector. Por isso, ele é chamado
produto vectorial. Este produto tem aplicação, por exemplo, em Física: a força exercida sobre uma partícula
carregada mergulhada num campo magnético é o produto vectorial do vector velocidade da partícula pelo vector
campo magnético, desde que o campo seja constante e a carga seja unitária.
−
−
Definição 3.2 Sejam →
v e →
w dois vectores no espaço. Definimos o produto vectorial ou produto externo,
→
−
−
v ×→
w , como sendo o vector com as seguintes características:
(a) tem comprimento dado numericamente por
−
−
−
−
k→
v ×→
w k = k→
v kk→
w k sin θ,
→
−
→
−
−
−
ou seja, a norma de v × w é numericamente igual à área do paralelogramo determinado por →
v e→
w (Figura
3.20);
→
−
w
−
k→
wk
−
h = k→
w k sin θ
θ
→
−
v
−
k→
vk
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
63
Capítulo 3. Espaços R2 e R3
Figura 3.20:
Área de um paralelogramo.
−
−
(b) tem direcção perpendicular a →
v ea→
w;
−
−
−
(c) tem o sentido dado pela regra da mão direita (Figura 3.21): Se o ângulo entre →
v e→
w é θ, giramos o vector →
v
→
−
de um ângulo θ até que coincida com w e acompanhamos este movimento com os dedos da mão direita, então
−
−
o polegar vai apontar no sentido de →
v ×→
w.
→
−
−
v ×→
w
→
−
v
→
−
w
Figura 3.21:
Regra da mão direita.
Da forma como definimos o produto vectorial é difícil o seu cálculo, mas as propriedades que apresentaremos a
seguir possibilitarão obter uma fórmula para o produto vectorial em termos das componentes dos vectores.
−
−
−
Teorema 3.5 Sejam →
v ,→
w e→
u vectores no espaço e α um escalar. São válidas as seguintes propriedades:
→
−
→
−
→
−
→
−
(a) v × w = −( w × v ), isto é, o produto vectorial é anti-comutativo;
→
−
−
−
−
−
(b) →
v ×→
w = 0 se, e somente se, →
v = α→
w;
→
−
→
−
→
−
→
−
→
−
→
−
(c) v ( v × w ) = w ( v × w ) = 0;
−
−
−
−
−
−
(d) α(→
v ×→
w ) = (α→
v)×→
w =→
v × (α→
w );
→
−
→
−
→
−
−
−
−
−
(e) ( v × w ) u > 0 se, e somente se, →
v ,→
w e→
u satisfazem a regra da mão direita, isto é, se o ângulo entre →
v e
→
−
→
−
→
−
w é θ, giramos o vector v de um ângulo θ até que coincida com w e acompanhamos este movimento com os
−
dedos da mão direita, então o polegar vai apontar no sentido de →
u;
−
−
−
−
−
−
(f ) |(→
v ×→
w) →
u | é numericamente igual ao volume do paralelepípedo determinado por →
v ,→
w e→
u (Figura 3.22);
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
(g) ( v × w ) u = v ( w × u ), ou seja, pode-se trocar os sinais × e em ( v × w ) u ;
−
−
−
−
−
−
−
−
−
−
−
−
−
−
(h) →
v × (→
w +→
u) = →
v ×→
w +→
v ×→
u e (→
v +→
w) × →
u =→
v ×→
u +→
w ×→
u (Distributividade em relação à soma de
vectores).
Demonstração:
−
−
−
−
(a) Trocando-se →
v por →
w troca-se o sentido de →
v ×→
w.
→
−
→
−
−
−
(b) k v × w k = 0 se, e somente se, um deles é o vector nulo ou sin θ = 0, em que θ é o ângulo entre →
v e→
w , ou seja,
→
−
→
−
→
−
→
−
→
−
→
−
→
−
v e w são paralelos. Assim, v × w = 0 se, e somente se, v = α w .
(c) Segue imediatamente da definição do produto vectorial.
(d) Segue facilmente da definição do produto vectorial, por isso deixamos como exercício para o leitor.
−
−
−
(e) Como vemos na Figura 3.22 →
v ,→
w e →
u satisfazem a regra da mão direita se, e somente se, 0 < θ < π/2 ou
−
−
−
−
−
−
−
−
−
−
−
−
cos θ > 0, em que θ é o ângulo entre →
v ×→
w e→
u . Como, (→
v ×→
w) →
u = k→
v ×→
w kk→
u k cos θ, então →
v ,→
w e→
u
−
−
−
satisfazem a regra da mão direita se, e somente se, (→
v ×→
w) →
u > 0.
−
−
−
(f) O volume do paralelepípedo determinado por →
v ,→
w e →
u é igual à área da base vezes a altura, ou seja, pela
definição do produto vectorial, o volume é dado por
−
−
Volume = k→
v ×→
w kh.
−
Mas, como vemos na Figura 3.24 a altura é h = k→
u k | cos θ|, o que implica que
−
−
−
−
−
−
Volume = k→
v ×→
w kk→
u k | cos θ| = k→
u (→
v ×→
w )k.
−
−
−
−
−
−
(g) Como o produto escalar é comutativo, pelo item (f), |(→
v ×→
w) →
u | = |→
v (→
w ×→
u |. Agora, pelo item (e),
−
−
−
−
−
−
−
−
−
(→
v ×→
w) →
u e→
v (→
w ×→
u ) têm o mesmo sinal, pois →
v ,→
w e→
u satisfazem a regra da mão direita se, e somente
−
−
−
se, →
w,→
u e→
v também satisfazem.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
64
Capítulo 3. Espaços R2 e R3
(h) Vamos provar a primeira igualdade e deixamos como exercício para o leitor a demonstração da segunda. Vamos
−
−
−
−
−
−
−
−
mostrar que o vector →
y =→
v × (→
w +→
u)−→
v ×→
w −→
v ×→
u é o vector nulo. Para isso, vamos mostrar que para
→
−
→
−
→
−
qualquer vector x no espaço x y = 0.
Pela distributividade do produto escalar, Teorema 3.3 item (b) na página 61, temos que
− →
→
−
−
−
−
−
−
−
−
−
−
x →
y =→
x →
v × (→
w +→
u) −→
x (−
v ×→
w) − →
x (→
v ×→
u ).
Pelo item (g), temos que
→
−
−
x →
y
=
=
=
−
−
−
−
−
−
−
−
−
−
(→
x ×→
v ) (→
w +→
u ) − (→
x ×→
v )→
w − (→
x ×→
v )→
u
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
( x × v ) (w + u ) − ( x × v ) (w + u )
0.
−
−
−
−
−
−
−
−
Assim, →
x →
y = 0, para todo vector →
x , em particular para →
x =→
y , temos que →
y →
y = k→
y k2 = 0. Portanto,
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
y = 0 , ou seja, v × ( w + u ) = v × w + v × u .
→
−
−
v ×→
w
→
−
u
−
h = k→
u k cos θ
θ
→
−
w
→
−
v
Figura 3.22:
Os vectores canónicos
−
−
−
Volume do paralelipípedo determinado por →
v ,→
w e →
u.
→
−
i = (1, 0, 0)
→
−
j = (0, 1, 0)
e
→
−
k = (0, 0, 1)
−
são vectores unitários (de norma igual a um) paralelos aos eixos coordenados. Todo vector →
v = (v1 , v2 , v3 ) pode ser
−
→
− →
− →
escrito em termos de uma soma de múltiplos escalares de i , j e k (combinação linear), pois
→
−
v = (v1 , v2 , v3 )
=
(v1 , 0, 0) + (0, v2 , 0) + (0, 0, v3 )
=
v1 (1, 0, 0) + v2 (0, 1, 0) + v3 (0, 0, 1)
→
−
→
−
→
−
v1 i + v2 j + v3 k .
=
(3.1.8)
Da definição de produto vectorial podemos obter facilmente as seguintes relações:
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
i × i = 0
j × j = 0
k × k = 0
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
i × j = k
j × k = i
k × i = j
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
j × i =−k
k × j =−i
i × k =−j
Agora, estamos prontos para obter uma fórmula que dê o produto vectorial de dois vectores em termos das suas
componentes.
−
−
−
−
Teorema 3.6 Sejam →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ) vectores no espaço. Então, o produto vectorial →
v ×→
w é
dado por
"
#
"
#
"
#!
v2
v3
v1
v3
v1
v2
→
−
→
−
v ×w =
det
, − det
, det
.
(3.1.9)
w2 w3
w1 w3
w1 w2
Demonstração:
→
−
→
−
→
−
→
−
→
−
→
−
−
−
De (3.1.8) segue-se que podemos escrever →
v = v1 i + v2 j + v3 k e →
w = w1 i + w2 j + w3 k . Assim, pela
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
65
Capítulo 3. Espaços R2 e R3
distributividade do produto vectorial em relação à soma temos que
→
−
→
−
→
−
→
−
→
−
→
−
→
−
−
v ×→
w = (v1 i + v2 j + v3 k ) × (w1 i + w2 j + w3 k )
→
−
→
−
→
−
→
−
→
−
→
−
= v1 w1 ( i × i ) + v1 w2 ( i × j ) + v1 w3 ( i × k ) +
→
−
→
−
→
−
→
−
→
−
→
−
+v2 w1 ( j × i ) + v2 w2 ( j × j ) + v2 w3 ( j × k ) +
→
−
→
−
→
−
→
−
→
−
→
−
+v3 w1 ( k × i ) + v3 w2 ( k × j ) + v3 w3 ( k × k )
→
−
→
−
→
−
= (v2 w3 − v3 w2 ) i + (v3 w1 − v1 w3 ) j + (v1 w2 − v2 w1 ) k
"
#
"
#
"
#
→
−
v2
v3
v1
v3
v1
v2
→
−
→
−
= det
i − det
j + det
k
w2 w3
w1 w3
w1 w2
"
#
"
#
"
#!
v2
v3
v1
v3
v1
v2
=
det
, − det
, det
.
w2 w3
w1 w3
w1 w2
−
−
Para obter as componentes do produto vectorial →
v ×→
w podemos proceder como segue:
−
−
• escreva as componentes de →
v acima das componentes de →
w:
"
#
v1
v2
v3
;
w1 w2 w3
−
−
• Para calcular a primeira componente de →
v ×→
w , elimine a primeira coluna da matriz acima e calcule o
determinante da sub-matriz resultante. A segunda componente é obtida, eliminando-se a segunda coluna
e calculando-se o determinante da sub-matriz resultante com o sinal trocado. A terceira é obtida como a
primeira, mas eliminando-se a terceira coluna.
→
− −
−
→
−
→
−
→
− →
−
−
−
Exemplo 3.11 Sejam →
v = i +2 j −2 k e →
w = 3 i + k . Vamos Vamos determinar o produto vectorial →
v ×→
w.
"
#
1 2 −2
3 0
1
"
#
"
#
"
#!
2 −2
1 −2
1 2
→
−
→
−
v × w = det
, − det
, det
= (2, −7, 6).
0
1
3
1
3 0
−
→
− →
− →
−
−
Usando os vectores i , j e k o produto vectorial →
v ×→
w , pode ser escrito em termos do determinante simbólico
→
→
−
−
→
−
"
#
"
#
"
#
i
j
k
→
−
v1
v3
v1
v2
v2
v3
→
−
→
−
→
−
−
v ×→
w = det v1
i − det
j + det
k.
v2
v3 = det
w2 w3
w1 w3
w1 w2
w1 w2 w3
Exemplo 3.12 Vamos calcular a área do triângulo determinado pelos pontos P (2, 2, 0), Q(0, 4, 3) e R(−1, 0, 2)
(Figura 3.23). Sejam
−
−
→
→
−
v = P Q = (0 − 2, 4 − 2, 3 − 0) = (−2, 2, 3)
−
→
→
−
w = P R = (−1 − 2, 0 − 2, 2 − 0) = (−3, −2, 2).
Então,
→
−
−
v ×→
w = (10, −5, 10)
e
Área =
1 →
15
−
k−
v ×→
wk =
.
2
2
z
Q(0, 4, 3)
R(−1, 0, 2)
y
P (2, 2, 0)
x
Figura 3.23:
Introdução à Álgebra Linear
Área do triângulo P QR.
Opto, Qui Ind, Mat
2007/2008
66
Capítulo 3. Espaços R2 e R3
3.1.4
Produto Misto
→
− − →
→
− −
→
−
→
−
→
−
−
→
−
→
−
→
−
−
Teorema 3.7 Sejam →
u = u1 i + u2 j + u3 k , →
v v1 i + v2 j + v3 k e →
w = w1 i + w2 j + w3 k . Então,
u1 u2 u3
→
−
−
−
u (→
v ×→
w ) = det v1
v2
v3 .
w1 w2 w3
Demonstração:
Segue do Teorema 3.2 na página 60, do Teorema 3.6 na página 64 e da definição de determinante de uma matriz
que
"
#
"
#
"
#!!
v2
v3
v1
v3
v1
v2
→
−
→
−
→
−
u ( v × w ) = (u1 , u2 , u3 ) det
, − det
, det
w2 w3
w1 w3
w1 w2
"
"
"
#
#
#
v2
v3
v1
v3
v1
v2
= u1 det
− u2 det
+ u3 det
w2 w3
w1 w3
w1 w2
u1 u2 u3
= det v1
v2
v3 .
w1 w2 w3
−
−
−
−
−
−
O produto →
u (→
v ×→
w ) é chamado de produto misto de →
u,→
v e→
w.
→
− −
→
− −
→
−
→
−
→
−
→
−
→
−
→
−
→
−
−
Exemplo 3.13 O produto misto dos vectores →
u =2 i − j +3k, →
v =− i +4j + k e →
w =5 i + j −2k é
u1 u2 u3
2 −1
3
→
−
−
−
u (→
v ×→
w ) = det v1
v2
v3 = det −1
4
1 = −84.
w1 w2 w3
5
1 −2
Pelo Teorema 3.5 item (f) na página 63 o volume de um paralelepípedo determinado por três vectores é igual
numericamente ao valor absoluto do produto misto destes vectores.
→
−
→
− −
→
−
→
−
→
−
→
−
−
−
Exemplo 3.14 Sejam →
v = 10 i , →
w = 5 i + 10 j e →
u = 3 i + 3 j + 7 k . O volume de um paralelepípedo com
−
−
−
arestas determinadas por →
u ,→
v e→
w é dado por
3
3
7
−
−
−
volume = |→
u (→
v ×→
w )| = | det 10
0
0 | = |700| = 700.
5
10 0
Segue imediatamente do Teorema 3.7 e do Teorema 3.5 item (f) na página 63 um critério para saber se três
vectores são paralelos a um mesmo plano.
→
− −
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
−
−
Corolário 3.7.1 Sejam →
u = u1 i + u2 j + u3 k , →
v = v1 i + v2 j + v3 k e →
w = w1 i + w2 j + w3 k . Estes
vectores são coplanares (isto é, são paralelos a um mesmo plano) se, e somente se,
u1 u2 u3
→
−
−
−
u (→
v ×→
w ) = det v1
v2
v3 = 0.
w1 w2 w3
Exemplo 3.15 Vamos verificar que os pontos P (0, 1, 1), Q(1, 0, 2), R(1, −2, 0) e S(−2, 2, −2) são coplanares, isto
é, pertencem a um mesmo plano. Com estes pontos podemos construir os vectores
−
−
→
P Q = (1 − 0, 0 − 1, 2 − 1) = (1, −1, 1),
−→
P R = (1 − 0, −2 − 1, 0 − 1) = (1, −3, −1) e
−→
P S = (−2 − 0, 2 − 1, −2 − 1) = (−2, 1, −3).
−
−
→ −→ −→
Os pontos P, Q, R e S pertencem a um mesmo plano se, e somente se, os vectores P Q, P R e P S são coplanares.
E isto acontece se, e somente se, o produto misto entre eles é zero. Assim, P, Q, R e S são coplanares, pois
1 −1
1
−
−
→ −→ −→
P Q (P R × P S) = det
1 −3 −1 = 0.
−2
1 −3
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
67
Capítulo 3. Espaços R2 e R3
O próximo resultado será usado na próxima secção para deduzir as equações paramétricas do plano.
−
−
−
Corolário 3.7.2 Sejam →
u ,→
v e→
w vectores no espaço.
→
−
→
−
→
−
(a) u , v e w são coplanares se, e somente se, a equação vectorial
→
−
−
−
−
x→
u + y→
v + z→
w = 0
tem solução não trivial, em que x, y e z são escalares.
→
−
−
(b) −
u,→
v e →
w são coplanares se, e somente se, um deles é combinação linear (soma de múltiplos escalares) dos
outros dois.
Demonstração:
→
−
−
−
−
−
−
−
(a) Seja A a matriz cujas colunas são →
u,→
v e→
w escritos como vectores colunas. A equação x→
u + y→
v + z→
w = 0
é equivalente ao sistema AX = 0. Assim, a equação tem solução não trivial se, e somente se, det(A) = 0. Mas,
−
−
−
−
−
−
det(A) = det(AT ) = →
u (→
v ×→
w ) = 0 se, e somente se, os vectores →
u ,→
v e →
w são coplanares, o que prova o
resultado.
→
−
−
−
−
−
−
−
(b) Pelo item anterior →
u ,→
v e →
w são coplanares se, e somente se, a equação x→
u + y→
v + z→
w = 0 possui solução
não trivial. Mas se isto acontece, então um dos escalares x ou y ou z pode ser diferente de zero. Se x 6= 0, então
→
−
−
−
−
−
−
u = (−y/x)→
v + (−z/x)→
w , ou seja, o vector →
u é combinação linear de →
v e→
w . De forma semelhante, se y 6= 0,
→
−
→
−
→
−
→
−
−
−
então v é combinação linear de u e w e se z 6= 0, então w é combinação linear de →
u e→
v . Claramente se um
dos vectores é combinação linear dos outros dois, então eles são coplanares.
Exercícios Numéricos
−→
−→
3.1.1 Determine o ponto C tal que AC = 2AB, sendo A(0, −2) e B(1, 0).
3.1.2 Uma recta no plano tem equação y = 2x + 1. Determine um vector paralelo a esta recta.
−
3.1.3 Determine uma equação para a recta no plano que é paralela ao vector →
v = (2, 3) e passa pelo ponto P0 (1, 2).
−
−
−
−
−
−
−
3.1.4 Dados os vectores →
u e→
v , determine o vector →
x , tal que 3→
x − 2→
v = 15(→
x −→
u ).
(
→
−
→
−
−
6x − 2y
= →
u
−
−
−
.
3.1.5 Dados os vectores →
u e→
v , determine o vector →
x , tal que
−
→
−
−
−
3→
x +
y
= →
u +→
v
−
3.1.6 Determine as coordenadas da extremidade do segmento orientado que representa o vector →
v = (3, 0, −3),
sabendo-se que a sua origem está no ponto P (2, 3, −5).
3.1.7 Quais são as coordenadas do ponto P ′ , simétrico do ponto P (1, 0, 3) em relação ao ponto M (1, 2, −1)? (Sug−
−−
→
−−→
estão: o ponto P ′ é tal que o vector M P ′ = −M P .)
3.1.8 Verifique se os pontos dados a seguir são colineares, isto é, pertencem a uma mesma recta:
(a) A(5, 1, −3), B(0, 3, 4) e C(0, 3, −5);
(b) A(−1, 1, 3), B(4, 2, −3) e C(14, 4, −15).
3.1.9 Verifique se é um paralelogramo o quadrilátero de vértices (não necessariamente consecutivos)
(a) A(4, −1, 1), B(9, −4, 2), C(4, 3, 4) e D(4, −21, −14);
(b) A(4, −1, 1), B(9, −4, 2), C(4, 3, 4) e D(9, 0, 5);
−
−
−
3.1.10 Quais dos seguintes vectores são paralelos →
u = (6, −4, −2), →
v = (−9, 6, 3), →
w = (15, −10, 5).
3.1.11 Dados os pontos A(1, −2, −3), B(−5, 2, −1) e C(4, 0, −1), determine o ponto D tal que A, B, C e D sejam
vértices consecutivos de um paralelogramo.
−
−
−
3.1.12 Verifique se o vector →
u é combinação linear (soma de múltiplos escalares) de →
v e→
w:
−
−
−
(a) →
v = (9, −12, −6), →
w = (−1, 7, 1) e →
u = (−4, −6, 2).
−
−
−
(b) →
v = (5, 4, −3), →
w = (2, 1, 1) e →
u = (−3, −4, 1).
−
−
3.1.13 Sejam →
v = (1, 2, −3) e →
w = (2, 1, −2). Determine vectores unitários paralelos aos vectores:
→
−
→
−
→
−
→
−
−
−
(a) v + w ; (b) v − w ; (c) 2→
v − 3→
w.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
68
Capítulo 3. Espaços R2 e R3
−
−
3.1.14 Ache o vector unitário da bissectriz do ângulo entre os vectores →
v = (2, 2, 1) e →
w = (6, 2, −3). (Sugestão:
observe que a soma de dois vectores está na direcção da bissectriz se, e somente se, os dois vectores tiverem
−
−
o mesmo comprimento. Portanto, tome múltiplos escalares de →
v e →
w de forma que eles tenham o mesmo
comprimento e tome o vector unitário na direcção da soma deles.)
−
−
3.1.15 Determine o valor de x para o qual os vectores →
v = (x, 3, 4) e →
w = (3, 1, 2) são perpendiculares.
−
−
3.1.16 Demonstre que não existe x tal que os vectores →
v = (x, 2, 4) e →
w = (x, −2, 3) são perpendiculares.
3.1.17 Ache o ângulo entre os seguintes pares de vectores:
(a) (2, 1, 0) e (0, 1, −1); (b) (1, 1, 1) e (0, −2, −2); (c) (3, 3, 0) e (2, 1, 2).
−
−
−
−
3.1.18 Decomponha →
w = (−1, −3, 2) como a soma de dois vectores →
w1 e →
w 2 , com →
w 1 paralelo ao vector (0, 1, 3) e
→
−
w ortogonal a este último. (Sugestão: recapitule o Exemplo 3.10 na página 62.
2
√
−
−
3.1.19 Sabe-se que o vector →
x é ortogonal a (1, 1, 0) e a (−1, 0, 1), tem norma 3 e sendo θ o ângulo entre →
x e
−
(0, 1, 0), tem-se cos θ > 0. Ache →
x.
3.1.20 Mostre que A(3, 0, 2), B(4, 3, 0) e C(8, 1, −1) são vértices de um triângulo rectângulo. Em qual dos vértices
está o ângulo recto?
3.1.21 Verifique se os seguintes pontos pertencem a um mesmo plano:
(a) A(2, 2, 1), B(3, 1, 2), C(2, 3, 0) e D(2, 3, 2);
(b) A(2, 0, 2), B(3, 2, 0), C(0, 2, 1) e D(10, −2, 1);
3.1.22 Calcule o volume do paralelepípedo que tem um dos vértices no ponto A(2, 1, 6) e os três vértices adjacentes
nos pontos B(4, 1, 3), C(1, 3, 2) e D(1, 2, 1).
3.1.23 Calcule a área do paralelogramo em que três vértices consecutivos são A(1, 0, 1), B(2, 1; 3) e C(3, 2, 4).
3.1.24 Calcule a área do triângulo com vértices A(1, 2, 1), B(3, 0, 4) e C(5, 1, 3).
√
→
−
→
−
→
−
→
−
→
−
−
−
−
3.1.25 Ache →
x tal que →
x × ( i + k ) = 2( i + j − k ) e k→
x k = 6.
√
→
−
→
−
→
−
→
−
→
−
−
−
x e j,
3.1.26 Sabe-se que o vector →
x é ortogonal a i + j e a − i + k , tem norma 3 e sendo θ o ângulo entre →
→
−
tem-se cos θ > 0. Ache x .
−
−
−
−
−
−
3.1.27 Considere dois vectores →
v e→
w tais que k→
v k = 5, k→
w k = 2 e o ângulo entre →
v e→
w é 60o . Determine, como
→
−
→
−
combinação linear de v e w :
−
−
−
−
−
(a) um vector →
x tal que →
x →
v = 20 e →
x →
w = 5;
→
− →
→
−
→
−
→
−
−
−
(b) um vector x tal que x × v = 0 e x →
w = 12.
Exercícios usando o Matlabr
Comandos do Matlabr :
>> V=[v1,v2,v3] cria um vector V, usando as componentes numéricas v1, v2, v3. Por exemplo, >> V=[1,2,3]
−
cria o vector →
v = (1, 2, 3);
>> V+W é a soma de V e W; >> V-W é a diferença V e W; >> num*V é o produto do vector V pelo escalar num;
>> subs(expr,x,num) substitui x por num na expressão expr;
>> solve(expr) determina a solução da equação expr=0;
Comandos numéricos do pacote GAAL:
>> V=randi(1,3) cria um vector aleatório com componentes inteiras;
>> no(V) calcula a norma do vector V;
>> pe(V,W) calcula o produto escalar do vector V pelo vector W;
>> pv(V,W) calcula o produto vectorial do vector V pelo vector W.
Comandos gráficos do pacote GAAL:
>> desvet(P,V) desenha o vector V com origem no ponto P e >> desvet(V) desenha o vector V com origem
no ponto O(0, 0, 0);
>> po([P1;P2;. . .;Pn]) desenha os pontos P1, P2,. . ., Pn;
>> lineseg(P1,P2,’cor’) desenha o segmento de recta P1P2;
>> eixos desenha os eixos coordenados;
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
69
Capítulo 3. Espaços R2 e R3
>> box desenha a caixa em volta da figura;
>> axiss reescala os eixos com a mesma escala;
>> rota faz uma rotação em torno do eixo z;
>> zoom3(factor) amplifica a região pelo factor;
>> tex(P,’texto’) coloca o texto no ponto P.
3.1.28 Digite no prompt
demog21,
(sem a vírgula!). Esta função demonstra as figuras gráficas para vectores.
3.1.29 Coloque em duas variáveis V e W dois vectores do plano ou do espaço a seu critério.
(a) Use a função ilsvw para visualizar a soma dos dois vectores.
(b) Coloque em uma variável alfa um número e use a função ilav(alfa,V) para visualizar a multiplicação
do vector V pelo escalar alfa.
(c) Use a função ilproj(W,V) para visualizar a projecção de V em W.
3.1.30 Use o Matlabr para resolver os Exercícios Numéricos a partir do Exercício 3.1.6.
Exercícios Teóricos
3.1.31 Demonstre que o segmento que une os pontos médios dos lados não paralelos de um trapézio é paralelo às
−→ −−→
−−→
bases e a sua medida é a média aritmética das medidas das bases. (Sugestão: mostre que M N = 12 (AB + DC)
−−→
−→
e depois conclua que M N é um múltiplo escalar de AB. Revise o Exemplo 3.3 na página 58.)
3.1.32 Demonstre que as diagonais de um paralelogramo se cortam ao meio. (Sugestão: Sejam M e N os pontos
−−→ →
−
médios das duas diagonais do paralelogramo. Mostre que o vector M N = 0 , então conclua que M = N .)
3.1.33 Considere o triângulo ABC e sejam M o ponto médio de BC, N o ponto médio de AC e P o ponto médio
de AB. Mostre que as medianas (os segmentos AM , BN e CP ) se cortam num mesmo ponto que divide as
−→
−−→ −−→
−−→
medianas na proporção 2/3 e 1/3. (Sugestão: Sejam G, H e I os pontos definidos por AG = 23 AM, BH = 23 BN
−
→
−−→ −
→ →
−
2 −→
e CI = 3 CP . Mostre que GH = GI = 0 e conclua que G = H = I.)
C
b
N
b
H
A
b
G
b M
I
b
P
b
B
3.1.34 Sejam A, B e C pontos quaisquer com A 6= B. Prove que:
−−→
−→
(a) um ponto X pertence à recta determinada por A e B (AX = λAB) se, e somente se,
−−→
−→
−
−
→
CX = αCA + β CB, com α + β = 1;
−−→
−→
(b) um ponto X pertence ao interior do segmento AB (AX = λAB, com 0 < λ < 1) se, e somente se,
−−→
−→
−
−
→
CX = αCA + β CB, com α ≥ 0, β ≥ 0 e α + β = 1;
−−→
−−−→
(c) um ponto X é um ponto interior ao triângulo ABC (A′ X = λA′ B ′ , com 0 < λ < 1, em que A′ é um
′
ponto interior ao segmento AC e B é interior ao segmento CB) se, e somente se,)
−−→
−→
−
−
→
CX = αCA + β CB, com α ≥ 0, β ≥ 0 e α + β = 1.
→
−
→
−
−
−
3.1.35 Mostre que se α→
v = 0 , então α = 0 ou →
v = 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
70
Capítulo 3. Espaços R2 e R3
−
3.1.36 Se α→
u =
→
−
3.1.37 Se α v =
−
−
−
α→
v , então →
u =→
v ? E se α 6= 0?
→
−
→
−
−
β v , então α = β ? E se →
v 6= 0 ?
3.1.38 Mostre que em um triângulo isósceles a mediana relativa à base é perpendicular à base.
3.1.39 Mostre que o ângulo inscrito em uma semi-circunferência é recto.
−→ −
−
−
→
−
Sugestão para os próximos 2 exercícios: Considere o paralelogramo ABCD. Seja →
u = AB e →
v = AD.
→
−
→
−
→
−
→
−
Observe que as diagonais do paralelogramo são u + v e u − v .
3.1.40 Mostre que se as diagonais de um paralelogramo são perpendiculares então ele é um losango.
3.1.41 Mostre que se as diagonais de um paralelogramo têm o mesmo comprimento então ele é um rectângulo.
−
−
−
−
−
−
3.1.42 Se →
v →
w =→
v →
u , então →
w =→
u?
−
−
−
−
−
3.1.43 Mostre que se →
v é ortogonal a vecw1 e →
w 2 , então →
v é ortogonal a α1 →
w 1 + α2 →
w 2.
−→ −−→
3.1.44 Demonstre que as diagonais de um losango são perpendiculares. (Sugestão: mostre que AC BD = 0, usando
−→ −−→
−→
−
−
→
o facto de que AB = DC e kABk = kBCk.)
→
−
→
− →
−
−
−
3.1.45 Sejam →
v um vector não nulo no espaço e α, β e γ os ângulos que →
v forma com os vectores i , j e k ,
respectivamente. Demonstre que
cos2 α + cos2 β + cos2 γ = 1.
(Sugestão: cos α =
→
−
→
−
v i
→
− ,
−
k→
v kk i k
cos β =
→
−
→
−
vj
→
−
−
k→
v kk j k
e cos γ =
→
−
→
−
vk
→
− .)
−
k→
v kk k k
−
−
3.1.46 Demonstre que, se →
v e→
w são vectores quaisquer, então:
1
−
−
−
−
−
−
(a) →
v →
w =
k→
v +→
w k2 − k→
v −→
w k2 ;
4
1 →
−
−
−
−
−
k−
v +→
w k2 + k→
v −→
w k2 .
(b) k→
v k2 + k→
w k2 =
2
(Sugestão:
desenvolva os segundos membros das igualdades
−
−
−
−
−
−
−
−
−
−
−
−
k→
v +→
w k2 = (→
v +→
w ) (→
v +→
w ) e k→
v −→
w k2 = (→
v −→
w ) (→
v −→
w ).)
acima
observando
que
−
−
3.1.47 Demonstre que se →
v e→
w são vectores quaisquer, então:
−
−
−
−
(a) |→
v →
w | ≤ k→
v kk→
w k;
→
−
→
−
→
−
−
(b) k v + w k ≤ k v k + k→
w k;
−
−
−
−
−
−
−
−
(Sugestão: mostre que k→
v +→
w k2 = (→
v +→
w ) (→
v +→
w ) ≤ (k→
v +→
w k)2 , usando o item anterior.)
→
−
−
−
(c) k−
v k − k→
w k ≤ k→
v −→
w k.
−
−
−
−
−
(Sugestão: defina →
u =→
v −→
w e aplique o item anterior a →
u e→
w .)
3.1.48 O produto vectorial é associativo? Justifique a sua resposta. (Sugestão: experimente com os vectores
−
− →
→
− →
i , j , k .)
−
−
3.1.49 Demonstre que se →
v e→
w são vectores quaisquer no espaço, então
−
−
−
−
k→
v ×→
w k ≤ k→
v kk→
w k.
−
−
−
−
−
−
−
−
−
3.1.50 Se →
u ,→
v e→
w são vectores no espaço, prove que |→
u (→
v ×→
w )| ≤ k→
u kk→
v kk→
w k. (Sugestão: use o Teorema
3.2 na página 60 e o exercício anterior.)
−
−
−
−
−
−
−
−
−
3.1.51 Mostre que →
u (→
v ×→
w) = →
v (→
w ×→
u)=→
w (→
u ×→
v ). (Sugestão: use as propriedades do determinante.)
3.1.52 Mostre que
−
−
−
−
−
−
−
−
−
−
(a) (α→
u 1 + β→
u 2 ) (→
v ×→
w ) = α→
u 1 (→
v ×→
w ) + β→
u 2 (→
v ×→
w );
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
(b) u (α v 1 + β v 2 ) × w = α u ( v 1 × w ) + β u ( v 2 × w );
−
−
−
−
−
−
−
−
−
−
(c) →
u →
v × (α→
w 1 + β→
w 2 ) = α→
u (→
v ×→
w 1 ) + β→
u (→
v ×→
w 2 );
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
(d) u ( v × w ) = u ( v + α u + β w ) × w .
(Sugestão: use as propriedades dos produtos escalar e vectorial)
3.1.53 Prove a identidade de Lagrange
−
−
−
−
−
−
k→
v ×→
w k2 = k→
v k2 k→
w k2 − (→
v →
w )2 .
3.1.54 Mostre que a área do triângulo com vértices (xi , yi ), para i = 1, 2, 3 é igual a | det(A)|/2, em que
x 1 y1 1
A = x 2 y2 1 .
x 3 y3 1
(Sugestão: Marque os pontos P1 (x1 , y1 , 1), P2 (x2 , y2 , 1), P3 (x3 , y3 , 1) e P1′ (x1 , y1 , 0). O volume do paralelepípedo
−−−→ −−−→ −−−→
determinado por P1 , P2 , P3 e P1′ é dado por |P1 P1′ (P1 P2 × P1 P3 )|. Mas, a altura deste paralelepípedo é igual
a 1. Assim, o seu volume é igual à área da base que é o paralelogramo determinado por P1 , P2 e P3 . Observe
−−→ −−−→ −−−→
que OP1′ , P1 P2 e P1 P3 são paralelos ao plano xy.)
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
71
Capítulo 3. Espaços R2 e R3
−
−
−
−
−
−
3.1.55 Sejam →
u 1, →
u2 e →
u 3 três vectores unitários mutuamente ortogonais. Se A = [→
u1 →
u2 →
u 3 ] é uma matriz
→
−
→
−
→
−
−1
T
3 × 3 cujas colunas são os vectores u 1 , u 2 e u 3 , então A é invertível e A
= A . (Sugestão: mostre que
AT A = I3 .)
−
−
−
3.1.56 Sejam →
u = (u , u , u ), →
v = (v , v , v3) e →
w = (w , w , w ). Prove a fórmula seguinte para o duplo
1
2
3
1
produto vectorial
2
1
2
3
→
−
−
−
−
−
−
−
−
−
u × (→
v ×→
w = (→
u →
w )→
v − (→
u →
v )→
w,
seguindo os seguintes passos:
(a) Prove que
→
−
→
−
→
−
u ×( i × j )
→
−
→
−
→
−
u ×(j × k)
→
−
→
−
→
−
u ×(k × i )
=
=
=
→
− →
−
→
− →
−
−
−
(→
u j ) i − (→
u i)j
→
−
→
−
→
−
→
−
−
−
(→
u k ) j − (→
u j )k
−
→
− →
→
− →
−
−
−
(→
u i ) k − (→
u k)i
(b) Prove usando o item anterior e as propriedades do produto vectorial que
→
−
→
− −
→
−
→
−
−
−
−
−
u × (→
v × i ) = (→
u i )→
v − (→
u →
v)i
→
−
→
− −
→
−
→
−
−
−
−
−
u × (→
v × j ) = (→
u j )→
v − (→
u →
v)j
→
−
→
−
−
u × (→
v × k)
=
→
− −
→
−
−
−
−
(→
u k )→
v − (→
u →
v)k
(c) Prove agora o caso geral usando o item anterior e as propriedades do produto vectorial.
3.2
3.2.1
Equações de Rectas e Planos
Equação do Plano
Existe uma analogia entre uma recta no plano e um plano no espaço. No plano, a equação de uma recta é
determinada se forem dados sua inclinação e um de seus pontos. No espaço, a inclinação de um plano é dada por
um vector perpendicular a ele e a equação de um plano é determinada se são dados um vector perpendicular a ele e
um de seus pontos.
−
Teorema 3.8 A equação de um plano π que passa por um ponto P0 (x0 , y0 , z0 ) e é perpendicular ao vector →
n =
(a, b, c) é
ax + by + cz + d = 0,
(3.2.10)
−
onde d = −(ax0 + by0 + cz0 ). A equação (3.2.10) é chamada equação geral do plano π e o vector →
n é chamado
vector normal do plano.
Demonstração:
−−→
−
Um ponto P (x, y, z) pertence ao plano π se, e somente se, o vector P0 P for perpendicular ao vector →
n , ou seja,
−−→
→
−
n P0 P = 0.
(3.2.11)
−−→
Como, P0 P = (x − x0 , y − y0 , z − z0 ), a equação (3.2.11) pode ser reescrita como
a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0,
ou seja,
ax + by + cz − (ax0 + by0 + cz0 ) = 0.
→
−
n = (a, b, c)
b
P (x, y, z)
b
P0 (x0 , y0 , z0 )
π
Figura 3.24:
−
Plano perpendicular a →
n = (a, b, c) e que passa pelo ponto PO (x0 , y0 , z0 ).
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
72
Capítulo 3. Espaços R2 e R3
Exemplo 3.16 Vamos encontrar a equação do plano π que passa pelo ponto P0 (3, −1, 7) e é perpendicular ao vector
→
−
n = (4, 2, −5). Do teorema anterior, a equação do plano é da forma
ax + by + cz + d = 0,
onde os coeficientes de x, y e z são as componentes do vector normal, ou seja, a = 4, b = 2 e c = −5. Assim, a
equação de π é da forma
4x + 2y − 5z + d = 0.
Para determinar o coeficiente d, basta usarmos o facto de que P0 (3, −1, 7) pertence a π. Mas, o ponto P0
pertence a π se, e somente se, as suas coordenadas satisfazem a equação de π, ou seja,
4 · 3 + 2 · (−1) − 5 · 7 + d = 0.
Daqui tiramos que d = −12 + 2 + 35 = 25. Finalmente, a equação do plano π é
4x + 2y − 5z + 25 = 0.
No plano, a equação de uma recta é determinada se forem dados dois pontos da recta. Analogamente, no espaço,
a equação de um plano é determinada se são dados três pontos P1 , P2 e P3 não colineares (isto é, não pertencentes
−−−→ −
−−−→
−
a uma mesma recta). Com os três pontos podemos “formar"os vectores →
v = P1 P2 e →
w = P1 P3 (Figura 3.25).
→
−
n = (a, b, c)
b P3
P1
b
π
P2
Figura 3.25:
b
Plano que passa por três pontos.
Exemplo 3.17 Vamos encontrar a equação do plano π que passa pelos pontos P1 (1, 2, −1), P2 (2, 3, 1) e P3 (3, −1, 2).
−−−→
−
−
Com os três pontos e um ponto genérico do plano, P (x, y, z), podemos “formar” os vectores →
v = P1 P2 = (v1 , v2 , v3 ), →
w =
−−−→
−−→
→
−
P1 P3 = (w1 , w2 , w3 ) e P1 P = (x − x1 , y − y1 , z − z1 ). O vector normal do plano, n = (a, b, c), é ortogonal a estes
−−→
−−−→
−−−→
−
−
−
três vectores. Daqui obtemos um sistema homogéneo com três equações (→
n P1 P = 0, →
n P1 P2 = 0 e →
n P1 P3 = 0)
e três incógnitas (a, b e c), que tem solução não trivial se, e somente se, o determinante da matriz do sistema é
igual a zero (Teorema 2.11 na página 44), ou seja, se, e somente se,
x − x 1 y − y1 z − z 1
det
(3.2.12)
v1
v2
v3
= 0.
w1
w2
w3
Mas,
−−→
P1 P = (x − 1, y − 2, z − (−1)) ,
−−−→
→
−
v = P P = (1, 1, 2),
1 2
Então, a equação do plano é
x−1 y−2
det
1
1
2
−3
Introdução à Álgebra Linear
−−−→
→
−
w = P1 P3 = (2, −3, 3).
z+1
2
= 9(x − 1) + (y − 2) − 5(z + 1) = 9x + y − 5z − 16 = 0.
3
Opto, Qui Ind, Mat
2007/2008
73
Capítulo 3. Espaços R2 e R3
A equação do plano também é determinada se ao invés de serem dados três pontos, forem dados um ponto P1 do
−
−
plano e dois vectores paralelos ao plano, →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ), desde que eles sejam não colineares.
−
Ou ainda, se forem dados dois pontos P1 e P2 do plano e um vector paralelo ao plano →
v = (v1 , v2 , v3 ), já que neste
−−−→
−
caso podemos formar o vector →
w = P1 P2 = (w1 , w2 , w3 ) que é também paralelo ao plano.
−−→
−
−
Temos três vectores paralelos ao plano: P1 P = (x − x1 , y − y1 , z − z1 ), →
v e →
w . O vector normal do plano,
−−→
→
−
−
n = (a, b, c), é ortogonal a estes três vectores. De onde obtemos um sistema homogéneo com três equações (→
n P1 P =
→
−
→
−
→
−
→
−
0, n v = 0 e n w = 0) e três incógnitas (a, b e c), que tem solução não trivial se, e somente se, o determinante
da matriz do sistema é igual a zero (Teorema 2.11 na página 44), ou seja, se, e somente se,
x − x 1 y − y1 z − z 1
det
(3.2.13)
v1
v2
v3
= 0.
w1
w2
w3
Assim, um ponto P (x, y, z) pertence a um plano π que passa pelo ponto P1 (x1 y1 , z1 ) e é paralelo aos vectores
→
−
−
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ) (não paralelos) se, e somente se, a equação (3.2.13) é verdadeira.
Alternativamente, podemos encontrar a equação do plano da seguinte forma. Como vimos anteriormente
−−→ −
−−−
→ −−−→
(Corolário 3.7.1 na página 66), três vectores, P1 P , P1 , P2 e P1 P3 são coplanares se, e somente se, o produto misto
entre eles é zero. Assim, um ponto P (x, y, z) pertence a π se, e somente se,
−−→ −−−→ −−−→
P1 P (P1 P2 × P1 P 3) = 0.
Mas,
Então,
−−→
P1 P
=
−−−→
P1 P2
=
−−−→
P1 P3
=
1
x− 2
1
det
−2
1
−
2
e assim a equação do plano é dada por
y
1
2
1
−
2
1
, y, z)
2
1 1
(− , , 0)
2 2
1
1
1
(− , − , − ).
2
2
2
(x −
z
1
1
1
1
0
= 4 (x − 2 ) + 4 y + 2 z
1
2
1
1
1
1
x + y + z − = 0.
4
4
2
8
Ou ainda, multiplicando por 8,
2x + 2y + 4z − 1 = 0.
A equação do plano também é determinada se ao invés de serem dados três pontos, forem dados um ponto P1 do
−
−
plano e dois vectores paralelos ao plano, →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3), desde que eles sejam não colineares.
−
Ou ainda, se forem dados dois pontos P1 e P2 do plano e um vector paralelo ao plano →
v = (v1 , v2 , v3 ), já que neste
−−−→
→
−
caso podemos formar o vector w = P1 P2 = (w1 , w2 , w3 ) que é também paralelo ao plano.
Nestes casos temos novamente pelo menos duas maneiras de encontrarmos a equação do plano. Uma delas é
−
−
−
observando que o vector →
n =→
v ×→
w é um vector normal ao plano. Desta forma temos um ponto do plano e um vector
−−→
−
normal ao plano. A outra é observando que temos três vectores paralelos ao plano: P1 P = (x − x1 , y − y1 , z − z1 ), →
v
→
−
e w . Como vimos anteriormente (Corolário 3.7.1 na página 66), os três vectores são coplanares se, e somente se, o
produto misto entre eles é zero, ou seja,
x − x 1 y − y1 z − z 1
−−→ →
−
→
−
P1 P ( v × w ) = det
(3.2.14)
v1
v2
v3
= 0.
w1
w2
w3
Assim, um ponto P (x, y, z) pertence a um plano π que passa pelo ponto P1 (x1 , y1 , z1 ) e é paralelo aos vectores
→
−
−
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 ) (não paralelos) se, e somente se, a equação (3.2.14) é verdadeira.
Observação 3.2 Não faz sentido dizer que um vector pertence a um plano. Pois, por um lado, um plano é um
conjunto de pontos e por outro, os vectores são “livres”, podem ser “colocados” em qualquer ponto. O correcto é dizer
que um vector é paralelo a um plano.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
74
Capítulo 3. Espaços R2 e R3
Equações Paramétricas
Além da equação geral do plano podemos também caracterizar os pontos de um plano da seguinte forma.
−
−
Considere um plano π, um ponto P0 (x0 , y0 , z0 ) pertencente a π e dois vectores →
v = (v1 , v2 , v3 ) e →
w = (w1 , w2 , w3 )
−−→
não colineares, paralelos a π. Um ponto P (x, y, z) pertence a π se, e somente se, o vector P0 P = (x−x0 , y −y0 , z −z0 )
−
−
uma combinação linear de →
v e→
w (Corolário 3.7.2 na página 67), ou seja, se existem escalares t e s tais que
−−→
−
−
P0 P = t→
v + s→
w.
(3.2.15)
Escrevendo em termos de componentes, (3.2.15) pode ser escrito como
(x − x0 , y − y0 , z − z0 ) = (tv1 + sw1 , tv2 + sw2 , tv3 + sw3 ).
Logo um ponto P (x, y, z) pertence
x =
y =
z =
a π se, e somente se, satisfaz as equações
x0
y0
z0
+
+
+
tv1
tv2
tv3
+
+
+
sw1
sw2
sw3
,
para todo t, s ∈ R.
Estas equações são chamadas equações paramétricas do plano.
Exemplo 3.18 Podemos obter equações paramétricas do plano do Exemplo 3.17 na página 72 usando o facto de
−−−→
−−−→
que ele passa pelo ponto P1 (1, 2 − 1) e é paralelo aos vectores P1 P2 = (1, 1, 2) e P1 P3 = (2, −3, 3). Assim,
1
+
t
+ 2s
x =
y =
2
+
t
− 3s , para todo t, s ∈ R.
z = −1 + 2t + 3s
Exemplo 3.19 Para encontrarmos as equações paramétricas do plano do Exemplo 3.16 na página 72 podemos
resolver a equação geral do plano 4x + 2y − 5z + 25 = 0. Podemos proceder como no caso de sistemas lineares e
− 12 t + 54 s e portanto
considerar as variáveis y e z livres: y = t e z = s. Assim, x = − 25
4
25
− 12 t + 54 s
x = −4
, para todo t, s ∈ R
y =
t
z =
s
−
−
são equações paramétricas do plano. Destas equações obtemos que os vectores →
v 1 = (− 12 , 1, 0) e →
v 2 = ( 54 , 0, 1) são
paralelos ao plano.
3.2.2
Equação da Recta
−
Vamos supor que uma recta r é paralela a um vector →
v = (a, b, c) não nulo e que passa por um ponto P0 (x0 , y0 , z0 ).
−−→
−
Um ponto P (x, y, z) pertence à recta r se, e somente se, o vector P0 P é paralelo ao vector →
v , isto é, se, e somente
−−→
→
−
se, o vector P0 P é um múltiplo escalar de v , ou seja,
−−→
−
P0 P = t→
v.
(3.2.16)
Em termos de componentes, (3.2.16) pode ser escrito como
(x − x0 , y − y0 , z − z0 ) = (ta, tb, tc),
de onde segue que x − x0 = ta, y − y0 = tb e z − z0 = tc. Isto prova o resultado seguinte.
Teorema 3.9 As equações
x
y
z
=
=
=
x0 + ta
y0 + tb ,
z0 + tc
para todo t ∈ R,
(3.2.17)
−
são de uma recta r que passa por um ponto P0 (x0 , y0 , z0 ) e é paralela ao vector →
v = (a, b, c). As equações (3.2.17)
→
−
são chamadas equações paramétricas da recta r. O vector v = (a, b, c) é chamado vector director da recta r.
O parâmetro t pode ser interpretado como o instante de tempo, se o ponto P (x, y, z) descreve o movimento
−
de uma partícula em movimento rectilíneo uniforme com vector velocidade →
v = (a, b, c). Observe que para t = 1,
P (x, y, z) = (x0 + a, y0 + b, z0 + c), para t = 2, P (x, y, z) = (x0 + 2a, y0 + 2b, z0 + 2c) e assim por diante.
As equações (3.2.17), podem ser reescritas como (x, y, z) = (x0 + at, y0 + bt, z0 + ct).
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
75
Capítulo 3. Espaços R2 e R3
−
Exemplo 3.20 A recta que passa por P0 (1, 2, 3) e é paralela ao vector →
v = (4, 5, −7) tem equações paramétricas
x = 1 + 4t
para todo t ∈ R,
y = 2 + 5t ,
z = 3 − 7t
Exemplo 3.21 Vamos encontrar as equações paramétricas da recta r que passa pelos pontos P1 (2, 4, −1) e P2 (5, 0, 7).
O vector
−−−→
P1 P2 = (5 − 2, 0 − 4, 7 − (−1)) = (3, −4, 8)
é paralelo a r e o ponto P1 (2, 4, −1) pertence a
x =
y =
z =
r. Portanto, as equações paramétricas de r são
2 + 3t
4 − 4t ,
−1 + 8t
para todo t ∈ R.
Podemos também encontrar a intersecção da recta r com os planos coordenados xy, yz e xz. A equação do plano
xy é z = 0, do plano yz é x = 0 e do plano xz é y = 0. Substituindo z = 0 nas equações de r, obtemos t = 1/8,
x = 19/8 e y = 7/2, ou seja, o ponto de intersecção de r com o plano xy é
(x, y, z) = (
19 7
, , 0).
8 2
De forma análoga, encontramos que (x, y, z) = (0, 20
, − 19
) é o ponto de intersecção de r com o plano yz e
3
3
(x, y, z) = (5, 0, 7) é o ponto de intersecção de r com o plano xz.
Observação 3.3 Não faz sentido dizer que o vector está contido na recta. Por um lado, a recta é um conjunto de
pontos e por outro um vector não tem posição fixa.
Equações Normais da Recta
Se todas componentes do vector director da recta r são não nulos, podemos resolver cada equação em (3.2.17)
para t e igualar os resultados obtendo o que chamamos de equações normais da recta.
x − x0
y − y0
z − z0
=
=
.
a
b
c
(3.2.18)
No Exemplo 3.21, as equações normais de r são:
x−2
y−4
z+1
=
=
.
3
−4
8
Se uma das componentes do vector director da recta r for nula, nas equações normais correspondentes o denominador será nulo. Neste caso, o numerador também deverá ser nulo. Por exemplo, se c = 0 na equação (3.2.18),
teremos
x − x0
y − y0
=
e z = z0 .
a
b
Exemplo 3.22 Vamos encontrar equações normais da recta r que passa pelos pontos P1 (3, 0, 2) e P2 (3, 3, 3). O
vector
−−−→
P1 P2 = (3 − 3, 3 − 0, 3 − 2) = (0, 3, 1)
é paralelo à recta r e o ponto P1 (3, 0, 2) pertence à recta. Portanto, equações normais de r são
y
= z − 2 e x = 3.
3
Exemplo 3.23 Vamos encontrar as equações paramétricas da recta r, intersecção dos planos
π1 :
π2 :
3x − y + z
x + 2y − z
=
=
0,
1.
(3.2.19)
Vectores normais destes planos são
→
−
−
n 1 = (3, −1, 1) e →
n 2 = (1, 2, −1).
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
76
Capítulo 3. Espaços R2 e R3
A recta r está contida em ambos os planos. Portanto é perpendicular a ambos os vectores normais. Assim, a
−
−
recta r é paralela ao produto vectorial →
n1 ×→
n 2 (Teorema 3.5 (c) na página 63).
"
#
"
#
"
#!
−1
1
3
1
3 −1
→
−
→
−
n 1 × n 2 = det
, − det
, det
= (−1, 4, 7).
2 −1
1 −1
1
2
−
−
−
Assim, →
v =→
n1 ×→
n 2 = (−1, 4, 7) é um vector director de r. Agora, precisamos encontrar um ponto da recta
r. Este ponto é uma solução particular do sistema
(
3x − y + z = 0,
(3.2.20)
x + 2y − z = 1.
Para encontrar uma solução particular do sistema, atribuímos um valor a uma das incógnitas (neste exemplo
podemos fazer z = 0) e resolvemos o sistema obtido, que é de duas equações e duas incógnitas
(
3x − y = 0,
x + 2y = 1.
Obtemos então, x = 71 e y = 37 , ou seja, o ponto P0 ( 17 , 37 , 0) é um ponto da recta r, pois é uma solução particular
do sistema (3.2.20). Assim, as equações paramétricas de r são
1
x = 7 −t
3
para todo t ∈ R.
(3.2.21)
y = 7 + 4t ,
z = 7t
Alternativamente, podemos encontrar as equações paramétricas de r determinando a solução geral do sistema
(3.2.19). Para isto devemos escalonar a matriz do sistema (3.2.19):
"
#
3 −1
1 0
.
1
2 −1 1
Vamos escolher para pivot o elemento de posição 2, 1. Precisamos “colocá-lo” na primeira linha. Para isto,
trocamos a 2a linha com a 1a
"
#
1
2 −1 1
1a linha ←→ 2a linha
3 −1
1 0
2a
Agora, precisamos “anular” o outro elemento da 1a coluna, que é a coluna do pivot. Para isto, adicionamos à
linha, −3 vezes a 1a linha.
"
#
1
1
2 −1
−3 × 1a linha + 2a linha ←→ 2a linha
0 −7
4 −3
Agora, já podemos obter facilmente a solução geral do sistema dado, já que ele é equivalente ao sistema
(
x + 2y −z
= 1
− 7y
+
4z = −3.
A variável z é uma variável livre. Podemos dar a ela um valor arbitrário, digamos t, para t ∈ R qualquer.
Assim, a solução geral do sistema dado é
1
1
x = 7 − 7t
para todo t ∈ R.
(3.2.22)
y = 37 + 47 t ,
z = t
Estas equações são diferentes das equações (3.2.21), mas representam a mesma recta, pois os vectores directores
obtidos das duas equações são paralelos e o ponto P0 ( 17 , 73 , 0) satisfaz também as equações (3.2.22). Poderíamos
dizer que (3.2.21) e (3.2.22) representam rectas coincidentes.
O próximo exemplo mostra como encontrar a equação da recta que é perpendicular a duas rectas.
Exemplo 3.24 Achar as equações da recta r3 que intercepta as rectas
x = −1 + 2t
r1 :
para todo t ∈ R,
y = 1+t ,
z = 0
e
r2 : x − 2 =
y−4
e z=3
2
e é perpendicular a ambas.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
77
Capítulo 3. Espaços R2 e R3
Um ponto qualquer da recta r1 é descrito por Pr1 (−1 + 2t, 1 + t, 0) e um ponto qualquer da recta r2 é da forma
−−−−→
Pr2 (2 + s, 4 + 2s, 3). Aqui é necessário o uso de um parâmetro diferente para a recta r2 . O vector Pr1 Pr2 =
(3 + s − 2t, 3 + 2s − t, 3) “liga” um ponto qualquer de r1 a um ponto qualquer de r2 . Vamos determinar t e s tais
−−−−→
−
−
que o vector Pr1 Pr2 seja perpendicular ao vector director →
v 1 = (2, 1, 0) de r1 e ao vector director →
v 2 = (1, 2, 0) de
r2 , ou seja, temos que resolver o sistema
( −−−−→
−
P r1 P r2 →
v 1 = 9 + 4s − 5t = 0
−−−−→ →
−
Pr1 Pr2 v 2 = 9 + 5s − 4t = 0.
A solução deste sistema é t = 1, s = −1.
equações paramétricas da recta procurada são
x
y
z
−−−−→
−
Logo, Pr1 (1, 2, 0), Pr2 (1, 2, 3) e →
v 3 = Pr1 Pr2 = (0, 0, 3). Assim as
=
=
=
1
2
3t
para todo t ∈ R.
Esta solução usou o facto de que as rectas são enviesadas, isto é, elas não são paralelas, mas também não se
interceptam. Como seria a solução se elas se interceptassem? Por exemplo se a recta r2 fosse dada por
r2 : x − 2 =
y−4
e z=0?
2
Exercícios Numéricos
3.2.1 Faça um esboço dos seguintes planos:
(a) 2x + 3y + 5z − 1 = 0
(b) x − 2y + 4z = 0
(c) 3y + 2z − 1 = 0
(d) 2x + 3z − 1 = 0
3.2.2 Faça um esboço das rectas dadas a seguir:
(e) 3x + 2y − 1 = 0
(f) 5y − 2 = 0
(g) 3z − 2 = 0
(h) 2x − 1 = 0
(a) (x, y, z) = (1 + 2t, 32 + t, 3 + 32 t)
(b) (x, y, z) = (2t, t, 32 t)
(c) (x, y, z) = (1 + t, 2, 3 + 2t)
(d) (x, y, z) = (1, 2 + 2t, 3 + t)
(e) (x, y, z) = (1 + 2t, 2 + t, 3)
(f) (x, y, z) = (1, 2, 3 + 2t)
(g) (x, y, z) = (1, 2 + 2t, 3)
(h) (x, y, z) = (1 + 2t, 2, 3)
3.2.3 Ache a equação do plano paralelo ao plano 2x − y + 5z − 3 = 0 e que passa por P (1, −2, 1).
3.2.4 Encontre a equação do plano que passa pelo ponto P (2, 1, 0) e é perpendicular aos planos x + 2y − 3z + 2 = 0
e 2x − y + 4z − 1 = 0.
3.2.5 Encontrar a equação do plano que passa pelos pontos P (1, 0, 0) e Q(1, 0, 1) e é perpendicular ao plano y = z.
→
−
→
−
→
−
−
3.2.6 Determine a intersecção da recta que passa pela origem e tem vector director →
v = i + 2 j + k com o plano
2x + y + z = 5.
3.2.7 Verifique se as rectas r : (x, y, z) = (9t, 1 + 6t, −2 + 3t) e s : (x, y, z) = (1 + 2t, 3 + t, 1) se interceptam e
em caso afirmativo determine a intersecção. (Sugestão: a questão é se as trajectórias se cortam e não se as
partículas se chocam, ou seja, elas não precisam estar num ponto no mesmo instante.)
3.2.8 Dadas as rectas
x−2
y
= = z e s : x − 2 = y = z,
2
2
obtenha uma equação geral para o plano determinado por r e s.
r:
3.2.9 Sejam P (4, 1, −1) e r : (x, y, z) = (2 + t, 4 − t, 1 + 2t).
(a) Mostre que P 6∈ r.
(b) Obtenha uma equação geral do plano determinado por r e P .
3.2.10 Dados os planos π1 : x − y + z + 1 = 0 e π2 : x + y − z − 1 = 0, determine o plano que contém π1 ∩ π2 e é
ortogonal ao vector (−1, 1, −1).
3.2.11 Quais dos seguintes pares de planos se cortam segundo uma recta?
(a) x + 2y − 3z − 4 = 0 e x − 4y + 2z + 1 = 0.
(b) 2x − y + 4z + 3 = 0 e 4x − 2y + 8z = 0.
(c) x − y = 0 e x + z = 0.
3.2.12 Encontre as equações da recta que passa pelo ponto Q(1, 2, 1) e é perpendicular ao plano x − y + 2z − 1 = 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
78
Capítulo 3. Espaços R2 e R3
3.2.13 Ache a equação da recta que passa pelo ponto P (1, 0, 1) e é paralela aos planos 2x + 3y + z + 1 = 0 e
x − y + z = 0.
3.2.14 Seja r a recta determinada pela intersecção dos planos x + y − z = 0 e 2x − y + 3z − 1 = 0. Ache a equação
do plano que passa por A(1, 0, −1) e contém a recta r.
3.2.15 Sejam r e s rectas enviesadas passando por A(0, 1, 0) e B(1, 1, 0) e por C(−3, 1, −4) e (−1, 2, −7), respectiva−
mente. Obtenha uma equação da recta concorrente com r e s e paralela ao vector →
v = (1, −5, −1).
3.2.16 (a) Mostre que os planos 2x − y + z = 0 e x + 2y − z = 1 se interceptam segundo uma recta r.
(b) Ache a equação da recta que passa pelo ponto A(1, 0, 1) e intercepta a recta r ortogonalmente.
3.2.17 Considere as rectas (x, y, z) = t(1, 2, −3) e (x, y, z) = (0, 1, 2) + s(2, 4, −6). Encontre a equação geral do plano
que contém estas duas rectas.
3.2.18 Determine as equações paramétricas da recta intersecção dos planos:
(a) x + 2y − 3z − 4 = 0 e x − 4y + 2z + 1 = 0;
(b) x − y = 0 e x + z = 0.
3.2.19 Considere o plano π : 2x + 2y − z = 0.
(a) Determine as rectas r, intersecção do plano π com o plano yz, s, intersecção do plano π com o plano xz e
t, intersecção do plano π com o plano z = 2. Desenhe um esboço do plano π mostrando as rectas r, s e t.
(b) Determine o volume do tetraedro determinado pelo plano π, os planos coordenados xz e yz e o plano
−→ −
−
→ −
−
→
z = 2. (Sugestão: este volume é igual a 1/6 do volume do paralelepípedo determinado por OA, OB e OC,
em que O(0, 0, 0), A é o ponto intersecção do eixo z com o plano z = 2, B é a intersecção das rectas r e t
e C é a intersecção das rectas s e t.)
(c) Determine a área da face do tetraedro contida no plano π.
(d) Determine a altura do tetraedro relativa a face contida no plano π. (Sugestão: a recta ortogonal ao plano
π que passa pelo ponto A intercepta o plano π num ponto P de forma que a altura procurada é igual a
−→
kAP k.)
3.2.20 Achar as equações da recta que intercepta as rectas r1 e r2 e é perpendicular a ambas.
(a)
r1
e
x
:
y
z
=
=
=
1+t
2 + 3t ,
4t
r2 : x + 1 =
(b)
r1
e
x
:
y
z
=
=
=
para todo t ∈ R
y−1
z+2
=
.
2
3
−1 + t
2 + 3t ,
4t
r2 : x =
para todo t ∈ R
y−4
z−3
=
.
2
3
Exercícios usando o Matlabr
Comandos do Matlabr :
>> V=[v1,v2,v3] cria um vector V, usando as componentes numéricas v1, v2, v3. Por exemplo >> V=[1,2,3]
−
cria o vector →
v = (1, 2, 3);
>> V+W é a soma de V e W; >> V-W é a diferença V menos W; >> num*V é o produto do vector V pelo escalar
num;
>> subs(expr,x,num) substitui x por num na expressão expr;
>> solve(expr) determina a solução da equação expr=0;
Comandos numéricos do pacote GAAL:
>> no(V) calcula a norma do vector V.
>> pe(V,W) calcula o produto escalar do vector V pelo vector W.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
79
Capítulo 3. Espaços R2 e R3
>> pv(V,W) calcula o produto vectorial do vector V pelo vector W.
>> subst(expr,[x,y,z],[a,b,c]) substitui na expressão expr as variáveis x,y,z por a,b,c, respectivamente.
Comandos gráficos do pacote GAAL:
>> lin(P,V) desenha a recta que passa por P com direcção V.
>> lin(P1,V1,P2,V2) desenha rectas que passam por P1, P2, direcções V1, V2.
>> plan(P,N) desenha o plano que passa por P com normal N.
>> plan(P1,N1,P2,N2) desenha planos que passam por P1, P2, normais N1, N2.
>> plan(P1,N1,P2,N2,P3,N3) desenha planos que passam por P1, P2 e P3 com normais N1, N2 e N3.
>> poplan(P1,P2,N2) desenha ponto P1 e plano passando por P2 com normal N2.
>> poline(P1,P2,V2) desenha ponto P2 e recta passando por P2 com direcção V2.
>> lineplan(P1,V1,P2,N2) desenha recta passando por P1 com direcção V1 e plano passando por P2 com
normal N2.
>> axiss reescala os eixos com a mesma escala.
>> rota faz uma rotação em torno do eixo z.
3.2.21 Digite no prompt demog22, (sem a vírgula!). Esta função demonstra as funções gráficas para visualização de
rectas e planos.
3.2.22 Use o Matlabr para resolver os Exercícios Numéricos.
Exercícios Teóricos
3.2.23 Seja ax + by + cz + d = 0 a equação de um plano π que não passa pela origem e corta os três eixos.
(a) Determine a intersecção de π com os eixos.
(b) Se P1 (p1 , 0, 0), P2 (0, p2 , 0) e P3 (0, 0, p3 ) são as intersecções de π com os eixos, a equação de π pode ser
posta sob a forma
x
y
z
+
+
= 1.
p1
p2
p3
3.3
3.3.1
Ângulos e Distâncias
Ângulos
Ângulo entre Rectas
Com duas rectas no espaço pode ocorrer um dos seguintes casos:
(a) as rectas se interceptam em um ponto, ou seja, são concorrentes;
(b) as rectas são paralelas (ou coincidentes);
(c) As rectas são enviesadas, isto é, não são paralelas mas também não se interceptam.
Se as rectas se interceptam, então elas determinam quatro ângulos, dois a dois opostos pelo vértice. O ângulo
entre elas é definido como sendo o menor destes ângulos.
Se as rectas r1 e r2 são enviesadas, então por um ponto P de r1 passa um recta r2′ que é paralela a r2 . O ângulo
entre r1 e r2 é definido como sendo o ângulo entre r1 e r2′ (Figura 3.26).
Se as rectas são paralelas o ângulo entre elas é igual a zero.
z
r2
r2′
→
−
v2
b
P
θ
→
−
v1
r1
y
x
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
80
Capítulo 3. Espaços R2 e R3
O ângulo entre duas rectas enviesadas r1 e r2 .
Figura 3.26:
−
−
Em qualquer dos casos, se →
v1 e→
v 2 são vectores paralelos a r1 e r2 , respectivamente, então o cosseno do ângulo
entre elas é
cos(r1 , r2 ) = | cos θ|,
−
−
em que θ é o ângulo entre →
v e→
v . Lembrando que da definição de produto escalar (Definição 3.1 na página 60),
1
2
podemos encontrar o cosseno do ângulo entre dois vectores, ou seja,
→
−
−
v 1 →
v2
cos θ = →
.
−
−
k v kk→
v k
1
2
Isto prova o resultado seguinte.
Teorema 3.10 Sejam duas
x
r1 :
y
z
rectas
=
=
=
x1 + ta1
y1 + tb1
z1 + tc1
,
e
x
:
y
z
r2
O cosseno do ângulo entre r1 e r2 é
=
=
=
x2 + ta2
y2 + tb2
z2 + tc2
,
para todo t ∈ R.
−
−
|→
v 1 →
v 2|
cos(r1 , r2 ) = | cos θ| = →
,
−
−
k v 1 kk→
v 2k
−
−
em que →
v 1 = (a1 , b1 , c1 ) e →
v 2 = (a2 , b2 , c2 ).
Exemplo 3.25 Encontrar o ângulo entre a recta
(
x +
r1 :
2x −
e a recta
r2
x
:
y
z
=
=
=
y
y
−
+
2t
1−t ,
2 + 3t
z
z
+
1
=
=
0
0
para todo t ∈ R.
Vamos encontrar vectores paralelos a estas rectas. A recta r1 é dada como a intersecção de dois planos, portanto
o produto vectorial dos vectores normais dos dois planos é paralelo a r1 .
→
−
n 1 = (1, 1, −1),
→
−
−
−
v1=→
n1 ×→
n2 =
det
"
1
−1
→
−
n 2 = (2, −1, 1),
#
"
#
"
−1
1 −1
1
, − det
, det
1
2
1
2
−
é paralelo a r1 e →
v 2 = (2, −1, 3) é paralelo a r2 . Assim,
cos(r1 , r2 )
=
=
1
−1
#!
= (0, −3, −3)
−
−
|→
v 1 →
v 2|
|0 · 2 + (−3) · (−1) + (−3) · 3|
= p
p
→
−
−
k v 1 kk→
v 2k
02 + (−3)2 + (−3)2 · 22 + (−1)2 + 32
1
| − 6|
√ √
= √ .
18 14
7
Portanto, o ângulo entre r1 e r2 é
1
arccos( √ ) ≈ 67o .
7
Ângulo entre Planos
−
−
Sejam π1 e π2 dois planos com vectores normais →
n 1 = (a1 , b1 , c1 ) e →
n 2 = (a2 , b2 , c2 ), respectivamente. O ângulo
entre π1 e π2 é definido como o ângulo entre duas rectas perpendiculares a eles. Como toda recta perpendicular a
−
−
π1 tem →
n 1 como vector director e toda recta perpendicular a π2 tem →
n 2 como vector director, então o cosseno do
ângulo entre eles é dado por
cos(π1 , π2 ) = | cos θ|,
→
−
−
em que θ é o ângulo entre os vectores normais n 1 e →
n 2 de π1 e π2 , respectivamente (Figura 3.27).
−
−
|→
n1 →
n 2|
Portanto, o cosseno do ângulo entre π1 e π2 é cos(π1 , π2 ) = →
. O que prova o resultado seguinte.
−
−
k n kk→
n k
1
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2
2007/2008
81
Capítulo 3. Espaços R2 e R3
Teorema 3.11 Sejam dois planos
r1 : a1 x + b1 y + c1 z + d1 = 0,
r2 : a2 x + b2 y + c2 z + d2 = 0.
O cosseno do ângulo entre π1 e π2 é
−
−
|→
n1 →
n 2|
cos(π1 , π2 ) = →
,
−
−
k n 1 kk→
n 2k
−
−
em que →
n 1 = (a1 , b1 , c1 ) e →
n 2 = (a2 , b2 , c2 ) são os vectores normais de π1 e π2 , respectivamente.
→
−
n2
→
−
n1
π2
θ
θ
π1
Figura 3.27:
O ângulo entre dois planos.
Dois planos π1 e π2 ou são paralelos ou se cortam segundo um recta. Eles são paralelos se, e somente se, os
vectores normais de π1 e π2 , são paralelos, ou seja, um vector é um múltiplo escalar do outro. Assim, π1 e π2 são
paralelos se, e somente se, o ângulo entre eles é igual a zero.
Exemplo 3.26 Determinar o ângulo entre os planos cujas equações são
π1 : x + y + z = 0,
π2 : x − y − z = 0.
Os vectores normais a estes planos são os vectores cujas componentes são os coeficientes de x, y e z nas equações
dos planos, ou seja,
→
−
−
n 1 = (1, 1, 1) e →
n 2 = (1, −1, −1).
Assim, o cosseno do ângulo entre π1 e π2 é
Portanto, o ângulo entre eles é
−
−
|→
n1 →
n 2|
1
1
cos(π1 , π2 ) = →
= √ √ = .
−
k−
n 1 kk→
n 2k
3
3 3
1
arccos( ) ≈ 70o .
3
Ângulo entre Recta e Plano
O ângulo entre uma recta e um plano é definido como sendo o ângulo θ que a recta faz com o plano (Figura
3.28).
−
−
Sejam r e π uma recta e um plano, respectivamente, tais que →
v = (v1 , v2 , v3 ) e →
n = (n1 , n2 , n3 ) são o vector
director da recta e o vector normal ao plano.
Como o ângulo entre o vector normal e o plano é de 90o graus, temos que
π
−
−
−
−
|→
v →
n | = k→
v kk→
n k cos
−θ ,
2
onde θ é o ângulo entre a recta e o plano.
Mas
π
π
π
cos
− θ = cos cos θ + sin sin θ = sin θ,
2
2
2
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
82
Capítulo 3. Espaços R2 e R3
donde concluímos que
−
−
|→
v →
n|
sin(r, π) = sin θ = →
.
−
k−
v kk→
nk
r
→
−
n = (n1 , n2 , n3 )
θ
→
−
v = (v1 , v2 , v3 )
π
Figura 3.28:
O ângulo entre recta e plano.
Exemplo 3.27 Determinar o ângulo entre a recta de equação
x−1
y−3
z+7
r:
=
=
2
−2
−1
e o plano de equação
π : x − y + z = 0.
→
−
−
O vector director da recta é v = (2, −2, −1) e o vector normal do plano é →
n = (1, −1, 1).
Assim, o seno do ângulo entre r e π é
√
−
−
|→
v →
n|
3
3
√
=
sin(r, π) = →
=
√
.
−
k−
v kk→
nk
3
9 3
Portanto, o ângulo entre eles é
√
3
) ≈ 35o .
arcsin(
3
3.3.2
Distâncias
Distância de um Ponto a um Plano
Sejam P0 (x0 , y0 , z0 ) um ponto qualquer e π : ax + by + cz + d = 0 um plano. A distância de P0 a π é definida
como sendo a distância de P0 até o ponto de π mais próximo de P0 .
−−−→
Dado um ponto P1 (x1 , y1 , z1 ) de π, podemos decompor o vector P1 P0 em duas parcelas, uma na direcção do
→
−
−
vector normal de π, n = (a, b, c) e outra perpendicular a ele. A componente na direcção do vector →
n é a projecção
−−−→
→
−
ortogonal de P1 P0 em n . Como vemos na Figura 3.29, a distância de P0 a π é igual à norma da projecção, ou seja,
−−−→
−
dist(P0 , π) = kproj→
n P1 P0 k.
Mas, pelo Teorema 3.4 na página 62, temos que
−−−→
! −−−→ −
P P →
−
| P1 P0 →
n|
−−−→
1 0 n
→
−
−
kproj→
P
P
k
=
n
=
.
n 1 0
−
−
k→
n k2
k→
nk
O que prova o resultado seguinte.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
83
Capítulo 3. Espaços R2 e R3
Teorema 3.12 Sejam P0 (x0 , y0 , z0 ) um ponto qualquer e π : ax + by + cz + d = 0 um plano. A distância de P0 a
π é dada por
−−−→ −
| P1 P0 →
n|
−−−→
−
,
dist(P0 , π) = kproj→
P
P
k
=
n 1 0
−
k→
nk
−
em que →
n = (a, b, c) e P1 (x1 , y1 , z1 ) é um ponto de π (isto é, um ponto que satisfaz a equação de π).
P0 (x0 , y0 , z0 )
→
−
n = (a, b, c)
dist(P0 , π)
b
−−−→
−
proj→
n P1 P0
b
b
b P1 (x1 , y1 , z1 )
π
Figura 3.29:
Distância de um ponto P0 (x0 , y0 , z0 ) a um plano π.
Exemplo 3.28 Calcular a distância entre o ponto P0 (1, 2, 3) ao plano
π : x − 2y + z − 1 = 0.
Fazendo z = 0 e y = 0 na equação de π, obtemos x = 1. Assim, o ponto P1 (1, 0, 0) pertence a π.
−−−→
P1 P0 = (1 − 1, 2 − 0, 3 − 0) = (0, 2, 3)
e
Assim,
→
−
n = (1, −2, 1).
−−−→ −
1
|0 · 1 + 2 · (−2) + 3 · 1|
| − 1|
| P1 P0 →
n|
−−−→
−
dist(P0 , π) = kproj→
= p
= √ = √ .
n P1 P0 k =
−
k→
nk
6
6
12 + (−2)2 + 12
Distância de um Ponto a uma Recta
Sejam P0 (x0 , y0 , z0 ) um ponto qualquer e r uma recta. A distância de P0 a r é definida como a distância de P0
ao ponto de r mais próximo de P0 .
−−−→
Dado um ponto qualquer P1 (x1 , y1 , z1 ) de r podemos decompor o vector P1 P0 em duas parcelas, uma na direcção
−
−
do vector director →
v de r e outra perpendicular a ele. A componente na direcção do vector →
v é a projecção ortogonal
−−−→
−
de P1 P0 em →
v . Como vemos na Figura 3.30,
−−−→ 2
−−−→ 2
−
(dist(P0 , r))2 + kproj→
v P1 P0 k = kP1 P0 k ,
ou seja,
−−−→
−−−→ 2
−
(dist(P0 , r))2 = kP1 P0 k2 − kproj→
v P1 P0 k .
(3.3.23)
Mas, pelo Teorema 3.4 na página 62, temos que
−−−→
! 2
−−−→ − 2
→
−
(P1 P0 →
v)
−−−→ 2 P1 P0 v →
−
−
kproj→
v
=
.
v P1 P0 k = →
−
−
k v k2
k→
v k2
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
84
Capítulo 3. Espaços R2 e R3
Substituindo esta expressão em (3.3.23) e usando a definição do produto escalar na página 60 e da norma do
produto vectorial na página 62 obtemos
−−−→
−−−→ − 2
−−−→ − 2
−
kP1 P0 k2 k→
v k2 − (P1 P0 →
v)
(P1 P0 →
v)
−−−→
=
(dist(P0 , r))2 = kP1 P0 k2 −
→
−
→
−
k v k2
k v k2
−−−→
−−−→
−
−
kP1 P0 k2 k→
v k2 − kP1 P0 k2 k→
v k2 cos2 θ
=
→
−
2
kvk
−−−→
−−−→ − 2
−
kP1 P0 k2 k→
v k2 sin2 θ
kP1 P0 × →
vk
=
.
→
−
−
k v k2
k→
v k2
=
Isto prova o resultado seguinte.
Teorema 3.13 Sejam P0 (x0 , y0 , z0 ) um ponto qualquer e
x = x1 + ta
r:
y = y1 + tb ,
z = z1 + tc
para todo t ∈ R
uma recta. A distância de P0 a r é dada por
−−−→ −
kP1 P0 × →
vk
,
−
k→
vk
dist(P0 , r) =
−
em que →
v = (a, b, c) é um vector director e P1 (x1 , y1 , z1 ) é um ponto da recta r.
P0 (x0 , y0 , z0 )
dist(P0 , r)
b
−−−→
P1 P0
r
b
−−−→
−
proj→
v P1 P0
b
b
→
−
v = (a, b, c)
P1 (x1 , y1 , z1 )
Figura 3.30:
Distância de um ponto P0 = (x0 , y0 , z0 ) a uma recta r.
Exemplo 3.29 Calcular a distância do ponto P0 (1, −1, 2) à recta
x = 1 + 2t
r:
, para todo t ∈ R.
y = −t
z = 2 − 3t
−
Um vector director da recta r é →
v = (2, −1, −3) e um ponto de r é P1 (1, 0, 2). Assim,
−−−→
P1 P0 = (1 − 1, −1 − 0, 2 − 2) = (0, −1, 0),
−−−→ →
P1 P0 × −
v = (3, 0, 2),
√
√
−−−→ →
−
−
kP P × v k = 13
e
k→
v k = 14.
1 0
Portanto,
dist(P0 , r) =
r
−−−→ −
kP1 P0 × →
vk
13
=
.
−
k→
vk
14
Distância entre dois Planos
Sejam dois planos π1 e π2 quaisquer. A distância entre π1 e π2 é definida como a menor distância entre dois
pontos, um de π1 e outro de π2 .
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
85
Capítulo 3. Espaços R2 e R3
Se os seus vectores normais não são paralelos, então os planos são concorrentes e neste caso a distância entre eles
é igual a zero. Se os seus vectores normais são paralelos, então os planos são paralelos (ou coincidentes) e a distância
entre π1 e π2 é igual à distância entre um ponto de um deles, por exemplo P2 de π2 , e o ponto de π1 , mais próximo
de P2 (Figura 3.31). Mas, esta distância é igual à distância de P2 a π1 . Vamos ver isto em um exemplo.
P2
b
dist(π1 , π2 )
π2
→
−
n1
−−−→
−
proj→
n 1 P1 P2
b
b
π1
P1
Figura 3.31:
Distância entre dois planos.
Exemplo 3.30 Os planos π1 : x + 2y − 2z − 3 = 0 e π2 : 2x + 4y − 4z − 7 = 0 são paralelos, pois os seus vectores
−
−
normais →
n 1 = (1, 2, −2) e →
n 2 = (2, 4, −4) são paralelos (um é múltiplo escalar do outro). Vamos encontrar a
distância entre eles.
Vamos encontrar dois pontos quaisquer de cada um deles. Fazendo z = 0 e y = 0 em ambas as equações obtemos
x1 = 3 e x2 = 7/2. Assim, P1 (3, 0, 0) pertence a π1 e P2 (7/2, 0, 0) pertence a π2 . Portanto, pelo Teorema 3.12
temos que
−−−→ −
| P1 P2 →
n 1|
−−−→
−
dist(π1 , π2 ) = dist(π1 , P2 ) = kproj→
n 1 P1 P2 k =
−
k→
n 1k
|(7/2 − 3, 0 − 0, 0 − 0) (1, 2, −2)|
|(1/2) · 1 + 0 · 2 + 0 · (−2)|
1
p
√
=
= .
=
2
2
2
6
9
1 + 2 + (−2)
Distância entre duas rectas
Sejam r1 e r2 duas rectas quaisquer. A distância entre r1 e r2 é definida como a menor distância entre dois
pontos, um de r1 e outro de r2 .
P2
b
dist(r1 , r2 )
r2
−−−→
P1 P2
r1
b
−−−→
−
proj→
v 1 P1 P2
b
b
→
−
v1
P1
Figura 3.32:
Distância entre duas rectas.
Para calcular a distância entre duas rectas, vamos dividir em dois casos:
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
86
Capítulo 3. Espaços R2 e R3
(a) se os vectores directores são paralelos, então as rectas r1 e r2 são paralelas (ou coincidentes). Neste caso,
a distância entre elas é igual à distância entre um ponto de r2 e a recta r1 , ou vice-versa, entre um ponto de r1
e a recta r2 (Figura 3.32). Assim, pelo Teorema 3.13 na página 84, temos que
−−−→ −
kP1 P2 × →
v 2k
,
(3.3.24)
dist(r1 , r2 ) = dist(P1 , r2 ) =
−
k→
v 2k
−
−
em que P e P são pontos de r e r e →
v e→
v são vectores directores de r e r , respectivamente.
1
2
1
2
1
2
1
2
(b) Se os vectores directores não são paralelos, então elas são enviesadas ou concorrentes. Os dois casos podem
ser resolvidos da mesma forma. Estas rectas definem dois planos paralelos (que podem ser coincidentes, no caso
em que elas são concorrentes). Um é o plano que contém r1 e é paralelo a r2 , vamos chamá-lo de π1 . O outro,
−
−
−
contém r2 e é paralelo a r1 , π2 . O vector →
n =→
v1×→
v 2 , é normal (ou perpendicular) a ambos os planos, em
→
−
→
−
que v 1 e v 2 são os vectores directores de r1 e r2 , respectivamente. Assim, a distância entre as rectas é igual à
distância entre estes dois planos (Figura 3.33), ou seja,
−−−→ −
−−−→ −
−
| P1 P2 →
n|
|P1 P2 (→
v1×→
v 2 )|
dist(r1 , r2 ) = dist(π1 , π2 ) = dist(π1 , P2 ) =
=
,
(3.3.25)
−−−−−−
→
−
→
−
→
−
k→
nk
k v 1 × v 2k
−
−
em que P1 e P2 são pontos de r1 e r2 e →
v1 e →
v 2 são vectores directores de r1 e r2 , respectivamente. Observe
−−−→ −
−
que se as rectas são concorrentes a distância entre elas é zero, pois os vectores P1 P2 , →
v1 e→
v 2 são coplanares e
−−−→ →
−
P P (−
v ×→
v ) = 0 (Corolário 3.7.1 na página 66).
1 2
1
2
r2
→
−
v2
b
P2
dist(r1 , r2 )
b
→
−
−
v ×→
v2
b
r1
Figura 3.33:
b
→
−
v1
P1
Distância entre duas rectas enviesadas.
Exemplo 3.31 Vamos determinar a distância entre as rectas
r1 :
e
x
:
y
z
x−1
y+1
z−2
=
=
4
−2
−6
1 + 2t
, para todo t ∈ R.
−t
2 − 3t
−
−
As rectas são paralelas, pois seus vectores directores →
v 1 = (4, −2, −6) →
v 2 = (2, −1, −3) são paralelos (um é
um múltiplo escalar do outro, ou ainda, as componentes correspondentes são proporcionais). Além disso, o ponto
P1 (1, −1, 2) pertence à recta r1 . Como dissemos acima, a distância de r1 a r2 é igual à distância entre um ponto
de r2 e a recta r1 (Figura 3.32). Assim, pelo Teorema 3.13 na página 84, temos que
r
−−−→ −
kP1 P2 × →
v 2k
13
dist(r1 , r2 ) = dist(P1 , r2 ) =
=
.
−
k→
v 2k
14
r2
=
=
=
As contas são as mesmas do Exemplo 3.29 na página 84.
Exemplo 3.32 Determinar a distância entre as rectas
r1 :
e
r2
Introdução à Álgebra Linear
x
:
y
z
=
=
=
x+1
y−1
=
=z
3
2
t
,
2t
1−t
para todo t ∈ R.
Opto, Qui Ind, Mat
2007/2008
87
Capítulo 3. Espaços R2 e R3
−
−
As rectas r1 e r2 são paralelas aos vectores →
v 1 = (3, 2, 1) e →
v 2 = (1, 2, −1) e passam pelos pontos P1 (−1, 1, 0)
e P2 (0, 0, 1), respectivamente. As rectas não são paralelas, pois seus vectores directores não são paralelos (observe
−
−
que a 1a componente de →
v 1 é 3 vezes a 1a componente de →
v 2 , mas as 2a ’s componentes são iguais). Logo,
−−−→
P1 P2 = (0 − (−1), 0 − 1, 1 − 0) = (1, −1, 1).
Um vector perpendicular a ambas as rectas é
→
−
−
−
n =→
v 1×→
v 2 = (−4, 4, 4).
Este vector é normal aos planos π1 (que contém r1 e é paralelo a r2 ) e π2 (que contém r2 e é paralelo a r1 )
(veja a Figura 3.33). Assim,
dist(r1 , r2 )
=
=
dist(π1 , π2 ) = dist(π1 , P2 ) =
−−−→ −
| P1 P2 →
n|
−
k→
nk
|1 · (−4) + (−1) · 4 + 1 · 4|
| − 4|
1
= √ = √ .
p
4 3
3
(−4)2 + 42 + 42
Exercícios Numéricos
→
− −
→
−
→
−
→
−
→
−
→
−
→
−
→
−
−
−
3.3.1 Considere os vectores →
v = i +3j +2k, →
w =2i − j + k e →
u = i − 2 j . Seja π um plano paralelo
→
−
→
−
−
aos vectores w e u e r uma recta perpendicular ao plano π. Ache a projecção ortogonal do vector →
v sobre a
→
−
recta r, ou seja, a projecção ortogonal de v sobre o vector director da recta r.
3.3.2 Encontrar o ângulo entre o plano 2x − y + z = 0 e o plano que passa pelo ponto P (1, 2, 3) e é perpendicular ao
→
−
→
−
→
−
vector i − 2 j + k .
3.3.3 Seja π1 o plano que passa pelos pontos A(1, 1, 1), B(1, 0, 1), C(1, 1, 0) e π2 o plano que passa pelos pontos
→
−
→
−
P (0, 0, 1) e Q(0, 0, 0) e é paralelo ao vector i + j . Ache o ângulo entre π1 e π2 .
3.3.4 Ache uma recta que passa pelo ponto (1, −2, 3) e que forma ângulos de 45o e 60o com os eixos x e y, respectivamente.
3.3.5 Obtenha os vértices B e C do triângulo equilátero ABC, sendo A(1, 1, 0) e sabendo que o lado BC está contido
−−→
na recta r : (x, y, z) = t(0, 1, −1). (Sugestão: Determine os pontos Pr da recta r tais que Pr A faz ângulo de
60o e 120o com o vector director da recta r)
3.3.6 Seja π o plano que passa pela origem e é perpendicular à recta que une os pontos A(1, 0, 0) e B(0, 1, 0). Encontre
a distância do ponto C(1, 0, 1) ao plano π.
3.3.7 Seja r1 a recta que passa pelos pontos A(1, 0, 0) e B(0, 2, 0), e r2 a recta
x−2=
z−4
y−3
=
.
2
3
(a) Encontre as equações da recta perpendicular às rectas r1 e r2 .
(b) Calcule a distância entre r1 e r2 .
3.3.8 Dados A(0, 2, 1), r : X = (0, 2, −2) + t(1, −1, 2), ache os pontos de r que distam
√
ponto A à recta r é maior, menor ou igual a 3? Por quê?
√
3 de A. A distância do
3.3.9 Dada a recta r : X = (1, 0, 0) + t(1, 1, 1) e os pontos A(1, 1, 1) e B(0, 0, 1), ache o ponto de r equidistante de
A e B.
3.3.10 Encontre a equação do lugar geométrico dos pontos equidistantes de A(1, −1, 2) e B(4, 3, 1). Este plano passa
pelo ponto médio de AB? Ele é perpendicular ao segmento AB?
3.3.11 Considere as rectas (x, y, z) = t(1, 2, −3) e (x, y, z) = (0, 1, 2) + s(2, 4, −6). Encontre a equação geral do plano
que contém estas duas rectas.
√
3.3.12 Ache as equações dos planos em R3 ortogonais ao vector (2, 2, 2), que distam 3 do ponto (1, 1, 1).
3.3.13 Obtenha uma equação geral do plano π, que contém a recta
(
x − 2y + 2z
r:
3x − 5y + 7z
=
=
0
0
e forma com o plano π1 : x + z = 0 um ângulo de 60o .
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
88
Capítulo 3. Espaços R2 e R3
Exercícios usando o Matlabr
3.3.14 Use o Matlabr para resolver os Exercícios Numéricos.
Exercícios Teóricos
3.3.15 Prove que o lugar geométrico dos pontos do espaço que equidistam de dois pontos distintos A(x1 , y1 , z1 ) e
B(x2 , y2 , z2 ) é um plano que passa pelo ponto médio do segmento AB e é perpendicular a ele. Esse plano é
chamado plano mediador do segmento AB.
3.3.16 Mostre que a distância de um ponto P0 (x0 , y0 , z0 ) a um plano π : ax + by + cz + d = 0 é
dist(P0 , π) =
|ax0 + by0 + cz0 + d|
.
√
a2 + b2 + c2
3.3.17 Mostre que a distância entre dois planos paralelos π1 : ax + by + cz + d1 = 0 e π2 : ax + by + cz + d2 = 0 é
dist(π1 , π2 ) = √
|d1 − d2 |
a2 + b2 + c2
.
3.3.18 Mostre que a distância entre duas rectas não paralelas r1 : (x, y, z) = (x1 + ta1 , y1 + tb1 , z1 + tc1 ) e
r2 : (x, y, z) = (x2 + ta2 , y2 + tb2 , z2 + tc2 ) é
x2 − x1 y2 − y1 z2 − z1
a1
b1
c1
det
a2
b2
c2
v
"
#! 2
"
#! 2
"
#! 2 .
u
u
a1 c1
a1 b1
t det b1 c1
+ det
+ det
b2 c2
a2 c2
a2 b2
−
3.3.19 O ângulo entre uma recta r que tem vector director →
v = (ar , br , cr ) e um plano π que tem vector normal
→
−
n = (aπ , bπ , cπ ) é definido pelo complementar do ângulo entre uma recta perpendicular ao plano π e a recta
r. Mostre que
−
−
|→
n →
v|
sin(r, π) = →
.
−
k−
n kk→
vk
−
3.3.20 A distância entre uma recta r que passa por um ponto P (x , y , z ) e tem vector director →
v = (a , b , c )
0
0
0
0
r
r
r
e um plano π : aπ x + bπ y + cπ z + dπ = 0 é definida como a menor distância entre dois pontos um de r e
−
outro de π. Se o vector director da recta r, →
v = (ar , br , cr ), não é ortogonal ao vector normal do plano π,
→
−
n = (aπ , bπ , cπ ), então a recta e o plano são concorrentes e a distância entre eles é igual a zero. Caso contrário,
a distância é igual a distância de uma ponto da recta r ao plano π. Mostre que
|aπ x0 + bπ y0 + cπ z0 + dπ |
−
−
p
,
se →
n →
v =0
a2π + b2π + c2π
dist(r, π) =
0,
caso contrário
3.3.21 Mostre que a distância de um ponto P0 (x0 , y0 ) a uma recta no plano r : ax + by + c = 0 é
dist(P0 , r) =
3.4
|ax0 + by0 + c|
√
.
a2 + b2
Posições Relativas de Rectas e Planos
Posições Relativas de duas Rectas
−
−
→ −−→
−
−
→ −−→
−
−
Consideremos duas rectas quaisquer r1 : OP = OP1 + t→
v 1 e r2 : OP = OP2 + t→
v 2 . Para estudar a posição
relativa destas rectas, vamos dividir em dois casos:
(a) se os vectores directores são paralelos, então as rectas são paralelas ou coincidentes (Figura 3.32 na página
85). Além de paralelas, elas são coincidentes se, e somente se, um ponto de uma recta pertence a outra recta.
−−−→
−
−
−
−
Portanto, se, e somente se, P1 P2 é paralelo a →
v 1 (e a →
v 2 , pois →
v1 e→
v 2 são paralelos).
(b) se os vectores directores não são paralelos, então as rectas são enviesadas ou concorrentes (Figura 3.33 na
página 86).
−−−→ −
−−−→ −
−
−
i. Se os vectores P1 P2 , →
v1 e→
v 2 são coplanares, ou seja, se P1 P2 (→
v 1 ×→
v 2 ) = 0 (Corolário 3.7.1 na página
66), então as rectas são concorrentes.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
89
Capítulo 3. Espaços R2 e R3
−−−→ −
−−−→ −
−
−
ii. Se os vectores P1 P2 , →
v1 e →
v 2 não são coplanares, ou seja, se P1 P2 (→
v1×→
v 2 ) 6= 0 (Corolário 3.7.1 na
página 66), então as rectas são enviesadas.
Posições Relativas de dois Planos
Sejam dois planos π1 : a1 x + b1 y + c1 z + d1 = 0 e π2 : a2 x + b2 y + c2 z + d2 = 0 quaisquer.
−
−
(a) Se os seus vectores normais →
n 1 = (a1 , b1 , c1 ) e →
n 2 = (a2 , b2 , c2 ) não são paralelos, então os planos são
concorrentes (Figura 3.34).
π1
π2
Figura 3.34:
Dois planos que se interceptam segundo uma recta.
−
−
(b) Se os seus vectores normais são paralelos, ou seja, se →
n 2 = α→
n 1 , então os planos são paralelos distintos
(Figura 3.31) ou coincidentes. Além de paralelos, eles são coincidentes se, e somente se, todo ponto que satisfaz
a equação de π1 , satisfaz também a equação de π2 .
Assim a2 x + b2 y + c2 z + d2 = αa1 x + αb1 y + αc1 z + d2 = α(a1 x + b1 y + c1 z) + d2 = α(−d1 ) + d2 = 0.
Portanto, d2 = αd1 e as equações de π1 e π2 são proporcionais. Reciprocamente, se as equações de π1 e π2
são proporcionais, então claramente os dois planos são coincidentes. Portanto, dois planos são coincidentes se, e
somente se, além dos vectores normais serem paralelos, as suas equações são proporcionais.
Posições Relativas de Recta e Plano
−
−
→ −−→
−
Sejam a recta r : (x, y, z) = OP = OP0 + t→
v e o plano π : ax + by + cz + d = 0.
→
−
−
(a) Se o vector director da recta r, v , e o vector normal do plano π, →
n = (a, b, c), são ortogonais
→
−
→
−
( v n = 0), então a recta e o plano são paralelos.
−
−
Se além dos vectores →
v e→
n serem ortogonais, um ponto qualquer da recta pertence ao plano, por exemplo, se
P0 pertence a π (P0 satisfaz a equação de π), então a recta está contida no plano.
−
−
(b) Se o vector director da recta r, →
v , e o vector normal do plano π, →
n = (a, b, c), não são ortogonais
→
−
→
−
( v n 6= 0), então a recta é concorrente ao plano (Figura 3.35).
r
π
Figura 3.35:
Introdução à Álgebra Linear
Recta e plano concorrentes.
Opto, Qui Ind, Mat
2007/2008
90
Capítulo 3. Espaços R2 e R3
Posições Relativas de três Planos
Consideremos três planos π1 , π2 , e π3 dados pelas equações:
a1 x + b1 y + c1 = d1
π1 :
π2 :
a2 x + b1 y + c2 = d2
π3 :
a3 x + b1 y + c3 = d3
(3.4.26)
−
−
Os vectores →
n i = (ai , bi , ci ) são normais aos planos →
n i , para i = 1, 2, 3. Os três vectores são coplanares ou não
são coplanares.
−
−
−
(a) Se os vectores →
n 1, →
n2 e →
n 3 não são coplanares, então vamos mostrar que os planos se interceptam dois a dois
segundo rectas que se interceptam em um ponto. As rectas r = π1 ∩ π2 e s = π1 ∩ π3 estão no plano π1 . Vamos
−→
mostrar que elas são concorrentes. Sejam A e B dois pontos distintos da recta r. O vector AB é perpendicular a
−→
−→
→
−
→
−
→
−
n 1 e a n 2 . Se as rectas r e s fossem paralelas, então AB seria perpendicular também a n 3 , ou seja, AB seria
−→ →
−
→
−
→
−
→
−
perpendicular a três vectores não coplanares o que implicaria que AB = 0 . Os vectores n 1 , n 2 e n 3 não são
coplanares se, e somente se
det(A) 6= 0,
a1 b1 c1
em que A = a2 b2 c2 . Neste caso o sistema tem solução única (Figura 3.36).
a3 b3 c3
π1
π2
π3
Figura 3.36:
Três planos que se interceptam segundo um ponto.
(b) Se os três vectores normais são coplanares, então pode ocorrer uma das seguintes situações:
−
−
−
−
−
−
i. Os vectores normais são paralelos, ou seja, →
n 1 = α→
n 2, →
n 1 = β→
n3 e →
n 2 = γ→
n 3 . Neste caso, os planos são
paralelos.
Se além disso, exactamente duas das equações são proporcionais, então exactamente dois planos são coincidentes e o sistema não tem solução. Se as três equações são proporcionais, então os três planos são
coincidentes e o sistema tem infinitas soluções. Se não ocorre nenhuma destas situações, os planos são
paralelos e distintos e o sistema não tem solução (Figura 3.37).
π3
π2
π1
Figura 3.37:
Introdução à Álgebra Linear
Três planos paralelos.
Opto, Qui Ind, Mat
2007/2008
91
Capítulo 3. Espaços R2 e R3
−
ii. Exactamente dois vectores normais são paralelos, ou seja, vale uma, e somente uma, equação entre: →
n1 =
→
−
→
−
→
−
→
−
→
−
α n 2 , n 1 = α n 3 e n 2 = α n 3 . Neste caso, exactamente dois planos são paralelos.
Se além de exactamente dois vectores normais serem paralelos, as equações correspondentes forem proporcionais, então dois planos são coincidentes e o terceiro corta os dois segundo uma recta. Neste caso o sistema
tem infinitas soluções. Se isto não acontece, então os planos paralelos são distintos e o sistema não tem
solução (Figura 3.38).
π3
π2
π1
Figura 3.38:
Três planos, sendo dois paralelos.
iii. Os vectores normais são coplanares e quaisquer dois vectores normais não são paralelos, ou seja, det(A) = 0 e
quaisquer dois vectores normais não são múltiplos escalares. Neste caso, quaisquer dois planos se interceptam
segundo rectas que são paralelas. Com estas condições podem ocorrer dois casos: os três planos se
interceptem segundo uma recta, (Figura 3.40) ou os planos se interceptem, dois a dois, segundo
rectas distintas (Figura 3.39). No primeiro caso, o sistema (3.4.26) tem infinitas soluções. No segundo
caso, o sistema não tem solução.
Figura 3.39:
Figura 3.40:
Introdução à Álgebra Linear
Planos interceptando-se 2 a 2.
Recta intersecção de três planos.
Opto, Qui Ind, Mat
2007/2008
92
Capítulo 3. Espaços R2 e R3
Exercícios Numéricos
3.4.1
(a) Determine as equações da recta r que é a intersecção dos planos:
π1 :
π2 :
x − 2y + 2z
3x − 5y + 7z
=
=
0
0.
(b) Qual a posição relativa da recta r e do plano y + z = 0.
3.4.2 Determine a posição relativa das rectas r e s
r:
s:
(x, y, z)
(x, y, z)
=
=
(1, 1, 1) + λ(2, 2, 1), ∀λ ∈ R
t(1, 1, 0) ∀t ∈ R.
3.4.3 Sejam r1 : (x, y, z) = (1, 0, 2) + (2t, t, 3t) e r2 : (x, y, z) = (0, 1, −1) + (t, mt, 2mt) duas rectas.
(a) Determine m para que as rectas sejam coplanares (não sejam enviesadas).
(b) Para o valor de m encontrado, determine a posição relativa entre r1 e r2 .
(c) Determine a equação do plano determinado por r1 e r2 .
3.4.4 Sejam a recta r : (x, y, z) = (1, 1, 1) + (2t, mt, t) e o plano π : 2x − y − 2z = 0. Determine o valor de m para
que a recta seja paralela ao plano. Para o valor de m encontrado a recta está contida no plano?
3.4.5 Caso exista, determine o ponto de intersecção das rectas dadas pelas equações r1 : (x, y, z) = (1, 1, 1)+t(1, 2, 0)
e r2 : (x, y, z) = (2, 3, 1) + m(1, 1, 1).
x−1
y−1
x−3
y−4
z−1
3.4.6 Determine a posição relativa das rectas dadas pelas equações
=
=z e
=
=
.
2
3
4
6
2
3.4.7 Determine a posição relativa das rectas dadas pelas equações (x, y, z) = (4, 2, 0)+t(4, 4, 1) e (x, y, z) = (2, 6, 1)+
m(2, 8, 2).
3.4.8 Uma recta r passa pelos pontos M (1, 2, 0) e N (3, 4, 5); uma recta s passa pelos pontos P (3, 1, 2) e Q cuja
abcissa é 2. Achar o ponto Q de modo a que a recta s seja paralela à recta r.
3.4.9 Dê a posição relativa dos seguintes ternos de planos:
(a) 2x + y + z = 1, x + 3y + z = 2, x + y + 4z = 3.
(b) x − 2y + z = 0, 2x − 4y + 2z = 1, x + y = 0.
(c) 2x − y + z = 3, 3x − 2y − z = −1, 2x − y + 3z = 7.
(d) 3x + 2y − z = 8, 2x − 5y + 2z = −3, x − y + z = 1.
(e) 2x − y + 3z = −2, 3x + y + 2z = 4, 4x − 2y + 6z = 3.
(f) −4x + 2y − 4z = 6, 3x + y + 2z = 2, 2x − y + 2z = −3.
(g) 6x − 3y + 9z = 3, 4x − 2y + 6z = 5, 2x − y + 3z = 2.
(h) x − 2y + 3z = 2, 3x + y − 2z = 1, 5x − 3y + 4z = 4.
Teste do Capítulo
1. Mostre que os pontos A(4, 0, 1), B(5, 1, 3), C(3, 2, 5) e D(2, 1, 3) são vértices de um paralelogramo. Calcule a
sua área.
2. Dado o triângulo de vértices A(0, 1, −1), B(−2, 0, 1) e C(1, −2, 0), determine a medida da altura relativa ao
lado BC.
−
−
−
3. Sejam →
u e→
v vectores no espaço, com →
v 6= 0.
−
−
−
(a) Determine o número α, tal que →
u − α→
v seja ortogonal a →
v.
→
−
→
−
→
−
→
−
→
−
→
−
(b) Mostre que ( u + v ) × ( u − v ) = 2 v × u .
4. Determine x para que A(x, 1, 2), B(2, −2, −3), C(5, −1, 1) e D(3, −2, −2) sejam coplanares.
5. Ache os pontos do plano π : y = x que equidistam dos pontos A(1, 1, 0) e B(0, 1, 1).
6. Quais são as coordenadas do ponto P0 , simétrico do ponto P (1, 0, 0) em relação à recta r : (x, y, z) = t(1, 1, 1)?
(a) Encontre a equação do plano π que passa pelos pontos A(0, 0, −1), B(0, 1, 0) e C(1, 0, 1).
7.
(b) Encontre a distância da origem ao plano π.
(a) Mostre que os planos x − y = 0 e y − z = 1 se interceptam segundo uma recta r.
8.
(b) Ache a equação do plano que passa pelo ponto A(1, 0, −1) e é perpendicular à recta r.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
Capítulo 4
Espaços e Subespaços Rn
4.1
Os Espaços Rn
Já vimos que os vectores no plano são identificados com os pares ordenados de números reais e que vectores no
espaço são identificados com ternos ordenados de números reais. Muito do que estudámos sobre vectores no plano e
no espaço pode ser estendido para n-úplas de números reais, em que n pode ser um número inteiro positivo.
Definição 4.1 Para cada inteiro positivo n, o espaço (vectorial) Rn é definido pelo conjunto de todas as n-úplas
−
ordenadas →
x = (x1 , . . . , xn ) de números reais.
O conjunto R1 é simplesmente o conjunto dos números reais. O conjunto R2 é o conjunto dos pares de números
reais e o R3 é o conjunto dos ternos de números reais.
No R3 , o terno de números (x1 , x2 , x3 ) pode ser interpretado geometricamente de duas maneiras: pode ser visto
como um ponto, neste caso x1 , x2 e x3 são as coordenadas do ponto (Figura 3.10), ou como um vector, neste caso
x1 , x2 e x3 são as componentes do vector (Figura 3.11). Também no Rn uma n-úpla pode ser pensada como um
vector ou como um ponto. Por exemplo, a quintúpla X(1, −2, 3, 5, 4) pode ser pensada como um ponto no R5 , quando
−
consideramos X como um elemento do conjunto R5 , ou como um vector do R5 , quando fazemos operações com →
x,
n
como as que iremos definir adiante. Vamos chamar os elementos do R de pontos ou de vectores dependendo da
situação.
−
−
Dois vectores →
v
=
(v1 , . . . , vn ) e →
w
=
(w1 , . . . , wn ) no Rn são considerados iguais se
v1 = w1 , . . . , vn = wn . As operações de soma de vectores e multiplicação de vector por escalar no Rn são definidas
de maneira análoga ao que fizemos no plano e no espaço.
Definição 4.2
−
−
(a) A soma de dois vectores →
v = (v1 , . . . , vn ) e →
w = (w1 , . . . , wn ) do Rn é definida por
→
−
−
v +→
w = (v1 + w1 , . . . , vn + wn );
(4.1.1)
−
(b) A multiplicação de um vector →
v = (v1 , . . . , vn ) do Rn por um escalar α é definida por
−
α→
v = (αv , . . . , αv ).
1
(4.1.2)
n
→
−
→
−
−
O vector nulo do Rn é denotado por 0 e é definido por 0 = (0, . . . , 0). Se →
v = (v1 , . . . , vn ) é um vector
→
−
→
−
→
−
n
do R , então o simétrico de v é denotado por − v e é definido por − v = (−v1 , . . . , −vn ). A diferença de dois
−
−
−
−
−
−
−
−
vectores no Rn é definida por →
v −→
w =→
v + (−→
w ). Se →
v e→
w são vectores do Rn tais que →
w = α→
v , para algum
−
−
escalar α, então dizemos que →
w é um múltiplo escalar de →
v.
−
Um vector →
v = (v1 , . . . , vn ) do Rn pode também ser escrito na notação matricial como uma matriz linha ou
como uma matriz coluna:
v1
h
i
.
→
−
−
v =
ou →
v = v1 . . . vn .
..
vn
Estas notações podem ser justificadas pelo facto de que as operações matriciais
v1
w1
v1 + w1
v1
αv1
.
.. ..
..
..
→
−
→
−
→
−
v + w = . + . =
, α v = α . = ..
.
vn
wn
vn + wn
vn
αvn
93
,
94
Capítulo 4. Espaços e Subespaços Rn
ou
→
−
−
v +→
w =
h
v1
i h
i h
vn + w1 . . . wn = v1 + w1 . . .
h
i h
i
−
α→
v = α v1 . . . vn = αv1 . . . αvn ,
...
vn + wn
i
,
produzem os mesmos resultados que as operações vectoriais.
No teorema seguinte enunciamos as propriedades mais importantes da soma de vectores e multiplicação de
vectores por escalar no Rn .
−
−
−
Teorema 4.1 Sejam →
u = (u1 , . . . , un ), →
v = (v1 , . . . , vn ) e →
w = (w1 , . . . , wn ) vectores do Rn e α e β escalares.
São válidas as seguintes propriedades:
−
−
−
−
(a) →
u +→
v =→
v +→
u
−
−
(e) α(β →
v ) = (αβ)→
v
−
−
−
−
−
−
(b) (→
u +→
v)+→
w =→
u + (→
v +→
w)
→
−
→
−
→
−
(c) u + 0 = u
→
−
−
−
(d) →
u + (−→
u)= 0
−
−
−
−
(f ) α(→
u +→
v ) = α→
u + α→
v
−
−
−
(g) (α + β)→
u = α→
u + β→
u
−
−
(h) 1→
u =→
u
Demonstração:
Segue directamente das propriedades da álgebra matricial (Teorema 1.1 na página 3).
4.1.1
Combinação Linear
−
−
−
−
Uma combinação linear de vectores →
v 1, . . . , →
v k , é simplesmente uma soma de múltiplos escalares de →
v 1, . . . , →
v k.
−
−
−
Definição 4.3 Um vector →
v é uma combinação linear dos vectores →
v 1, . . . , →
v k , se existem escalares x1 , . . . , xk
que satisfazem a equação
−
−
−
−
x1 →
v1 + x2 →
v 2 + · · · + xk →
vk=→
v,
(4.1.3)
−
ou seja, se a equação vectorial (4.1.3) possui solução. Neste caso, dizemos também que →
v pode ser escrito como
→
−
→
−
uma combinação linear de v 1 , . . . , v k .
−
−
−
−
Se k = 1, então a equação (4.1.3) se reduz a x1 →
v1 = →
v 1 , ou seja, →
v é uma combinação linear de →
v 1 se, e
−
−
somente se, →
v é um múltiplo escalar de →
v 1.
−
−
−
Exemplo 4.1 Sejam →
v 1 = (1, 0, 0) e →
v 2 = (1, 1, 0), vectores do R3 . O vector →
v = (2, 3, 2) não é uma combinação
−
−
linear de →
v1 e→
v 2 pois a equação
−
−
−
x1 →
v 1 + x2 →
v2=→
v,
(4.1.4)
que pode ser escrita como
x1 (1, 0, 0) + x2 (1, 1, 0) = (2, 3, 2),
ou ainda,
(x1 + x2 , x2 , 0) = (2, 3, 2),
é equivalente ao sistema
que não possui solução.
x1
+
x2
x2
0
=
=
=
2
3
2
−
−
−
Exemplo 4.2 O vector →
v = (2, 3, 0) é uma combinação linear de →
v 1 = (1, 0, 0) e →
v 2 = (1, 1, 0), pois a equação
−
−
−
x1 →
v 1 + x2 →
v2=→
v,
(4.1.5)
ou
x1 (1, 0, 0) + x2 (1, 1, 0) = (2, 3, 0),
ou ainda,
(x1 + x2 , x2 , 0) = (2, 3, 0),
é equivalente ao sistema
que possui solução.
Introdução à Álgebra Linear
x1
+
x2
x2
0
=
=
=
2
3
0
Opto, Qui Ind, Mat
2007/2008
95
Capítulo 4. Espaços e Subespaços Rn
→
−
−
−
Exemplo 4.3 O vector nulo 0 é sempre combinação linear de quaisquer vectores →
v 1, . . . , →
v k , pois
→
−
−
−
0 = 0→
v 1 + . . . + 0→
v k.
−
Exemplo 4.4 Todo vector →
v = (a, b, c) do R3 é uma combinação linear de
→
−
→
−
→
−
i = (1, 0, 0), j = (0, 1, 0) e k = (0, 0, 1),
pois,
→
−
→
−
→
−
(a, b, c) = a(1, 0, 0) + b(0, 1, 0) + c(0, 0, 1) = a i + b j + c k .
→
−
−
−
Para verificarmos se um vector b é combinação linear de um conjunto de vectores {→
a 1, . . . , →
a n }, escrevemos a
equação vectorial
→
−
−
−
−
x1 →
a 1 + x2 →
a 2 + · · · + xn →
an = b
(4.1.6)
−
−
e verificamos se ela tem solução. Se →
a 1, . . . , →
a n são vectores do Rm , a equação (4.1.6), pode ser escrita como
b1
a11
a1n
.
.. ..
x1
.. + · · · + xn
. = . ,
bm
am1
amn
que é equivalente ao sistema linear
AX = B,
x1
.
−
−
−
em que as colunas de A são os vectores →
a i escritos como matrizes colunas, ou seja, A = [→
a 1 ... →
a n] e X =
.. .
xn
Isto prova o seguinte resultado.
→
−
→
−
Teorema 4.2 Sejam A uma matriz m × n e b uma matriz m × 1. O vector b é combinação linear das colunas
→
−
de A se, e somente se, o sistema AX = b tem solução.
4.1.2
Independência Linear
−
−
Definição 4.4 Dizemos que um conjunto S = {→
v 1, . . . , →
v k } de vectores é linearmente independente (L.I.) se
a equação vectorial
→
−
−
−
−
x1 →
v 1 + x2 →
v 2 + · · · + xk →
vk= 0
(4.1.7)
só possui a solução trivial, ou seja, se a única forma de escrever o vector nulo como combinação linear dos vectores
→
−
−
v 1, . . . , →
v k é aquela em que todos os escalares são iguais a zero. Caso contrário, isto é, se (4.1.7) possui solução
não trivial, dizemos que o conjunto S é linearmente dependente (L.D.).
−
−
Exemplo 4.5 Um conjunto finito de vectores do Rn que contém o vector nulo é L.D., pois se {→
v 1, . . . , →
v k } é tal
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
que v j = 0 , para algum j, então 0 v 1 + · · · + 0 v j−1 + 1. v j+1 + 0 v j + · · · + +0 v k = 0 .
→
−
−
−
Exemplo 4.6 Um conjunto formado por um único vector, {→
v 1 }, não nulo é L.I., pois x1 →
v 1 = 0 é equivalente a
→
−
→
−
→
−
→
−
x1 = 0 ou v 1 = 0 . Mas, v 1 6= 0 , portanto x1 = 0.
−
−
Exemplo 4.7 Se {→
v 1, . . . , →
v k } é um conjunto de vectores L.D., então qualquer conjunto finito de vectores que
−
−
contenha →
v 1, . . . , →
v k é também L.D., pois a equação
→
−
−
−
−
−
x1 →
v 1 + · · · + xk →
v k + 0→
w 1 + · · · + 0→
wm = 0
admite solução não trivial.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
96
Capítulo 4. Espaços e Subespaços Rn
−
−
−
Exemplo 4.8 Um conjunto formado por dois vectores, {→
v 1, →
v 2 } é L.D. se, e somente se, a equação x1 →
v1+
→
−
→
−
x2 v 2 = 0 possui solução não trivial. Mas se isto acontece, então um dos escalares x1 ou x2 pode ser diferente
−
−
−
−
−
−
de zero. Se x1 6= 0, então →
v 1 = (x2 /x1 )→
v 2 e se x2 6= 0, então →
v 2 = (x1 /x2 )→
v 1 . Ou seja, se {→
v 1, →
v 2 } é L.D.,
então um dos vectores é múltiplo escalar do outro.
→
−
−
−
−
−
Reciprocamente, se um vector é múltiplo escalar do outro, digamos se →
v 1 = α→
v 2 , então 1.→
v 1 − −α→
v2= 0 e
assim eles são L.D. Portanto, podemos dizer que dois vectores são L.D. se, e somente se, um é um múltiplo escalar
do outro.
−
−
−
−
Por exemplo, o conjunto S = {→
v 1, →
v 2 }, em que →
v 1 = (1, 0, 1) e →
v 2 = (0, 1, 1), é L.I., pois um vector não é
múltiplo escalar do outro.
−
−
−
−
Exemplo 4.9 Um conjunto formado por três vectores, {→
v 1, →
v 2, →
v 3 } é L.D. se, e somente se, a equação x1 →
v1+
→
−
→
−
→
−
x2 v 2 + x3 v 3 = 0 possui solução não trivial. Mas se isto acontece, então um dos escalares x1 ou x2 ou x3 pode
−
−
−
−
ser diferente de zero. Se x1 6= 0, então →
v 1 = (−x2 /x1 )→
v 2 + +(−x3 /x1 )→
v 3 , ou seja, o vector →
v 1 é combinação
→
−
→
−
→
−
→
−
−
linear de v 2 e v 3 . De forma semelhante, se x2 6= 0, então v 2 é combinação linear de v 1 e →
v 3 e se x3 6= 0,
→
−
→
−
→
−
→
−
→
−
→
−
n
então v 3 é combinação linear de v 1 e v 2 . Assim, se três vectores v 1 , v 2 e v 3 do R são L.D., então um deles
é uma combinação linear dos outros dois, ou seja, em deles é uma soma de múltiplos escalares dos outros dois. No
R3 temos que se três vectores não nulos são L.D., então ou os três são paralelos, ou dois deles são paralelos ou os
três são coplanares, isto é, são paralelos a um mesmo plano.
−
−
−
Reciprocamente, se um vector é uma combinação linear dos outros dois, digamos se →
v 1 = = α→
v 2 + β→
v 3 , então
→
−
→
−
→
−
→
−
1. v 1 − α v 2 − β v 3 = 0 e assim eles são L.D. Portanto, podemos dizer que três vectores são L.D. se, e somente se,
um deles é uma combinação linear dos outros dois. No R3 , se três vectores são L.I., então eles não são coplanares.
−
−
Exemplo 4.10 Vamos mostrar que os vectores →
e1
=
(1, 0, . . . , 0), →
e2
=
(0, 1, 0, . . . , 0), . . . ,
→
−
→
−
→
−
→
−
e n = (0, . . . , 0, 1) são L.I.. Em particular os vectores i = (1, 0, 0), j = (0, 1, 0) e k = (0, 0, 1) são L.I. A
equação
→
−
−
−
x1 →
e 1 + · · · + xn →
en= 0
pode ser escrita como
x1 (1, 0, . . . , 0) + · · · + xn (0, . . . , 0, 1) = (0, . . . , 0).
Logo, (x1 , . . . , xn ) = (0, . . . , 0), que é equivalente ao sistema x1 = 0, . . . , xn = 0.
−
−
Para descobrir se um conjunto de vectores {→
a 1, . . . , →
a n } é L.I. precisamos saber se a equação vectorial
→
−
→
−
→
−
−
x1 a 1 + x2 a 2 + · · · + xn →
an = 0
(4.1.8)
−
−
tem somente a solução trivial. Se →
a 1, . . . , →
an
a11
.
x1
..
am1
são vectores do Rm ,
a1n
..
+ · · · + xn
.
amn
a equação (4.1.8), pode ser escrita como
0
.
= .
.
0
−
que é equivalente ao sistema linear homogéneo AX = 0, em que as colunas de A são os vectores →
a i escritos como
x1
.
−
−
matrizes colunas, ou seja, A = →
a 1 ... →
an e X =
.. . Isto prova o seguinte resultado.
xn
Teorema 4.3 Seja A uma matriz m × n.
(a) As colunas de A são linearmente independentes se, e somente se, o sistema AX = 0 tem somente a solução
trivial.
(b) Se m = n, então as colunas de A são linearmente independentes se, e somente se, det(A) 6= 0.
Exemplo 4.11 Três ou mais vectores no R2 , assim como quatro ou mais vectores no R3 e mais de n vectores no
Rn são sempre L.D. Pois, nestes casos, o problema de verificar se eles são ou não L.I. leva a um sistema linear
homogéneo com mais incógnitas do que equações, que pelo Teorema 1.7 na página 21 tem sempre solução não trivial.
−
−
−
Exemplo 4.12 Considere os vectores →
x 1 = (1, 0, 1), →
x 2 = (0, 1, 1) e →
x 3 = (1, 1, 1) do R3 . Para sabermos se eles
são L.I. ou L.D. escrevemos a equação
→
−
−
−
−
a1 →
x 1 + a2 →
x 2 + a3 →
x3 = 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
97
Capítulo 4. Espaços e Subespaços Rn
Esta equação vectorial é equivalente ao sistema linear AX = 0, em que
1 0 1
→
−
→
−
→
−
A = [ x 1 x 2 x 3] = 0 1 1 .
1 1 1
Escalonando a matriz [A|0] podemos obter a sua forma escalonada reduzida
1 0 0 0
[R|0] = 0 1 0 0 .
0 0 1 0
Concluímos, então que o sistema AX = 0 possui somente a solução trivial a1 = a2 = a3 = 0. Portanto os
−
−
−
vectores →
x 1, →
x2 e →
x 3 são L.I.
−
−
−
Exemplo 4.13 Sejam →
v 1 = (1, 2, 5), →
v 2 = (7, −1, 5) e →
v 3 = (1, −1, −1) vectores do R3 . Para sabermos se eles
são L.I. ou L.D. escrevemos a equação
→
−
−
−
−
x1 →
v 1 + x2 →
v 2 + x3 →
v3 = 0.
(4.1.9)
Esta equação vectorial é equivalente ao sistema linear AX = 0, em que
1
7
1
−
−
−
A = [→
v1 →
v2 →
v 3 ] = 2 −1 −1 .
5
5 −1
A matriz [A|0] é equivalente por linhas à matriz
1
[R|0] = 0
0
escalonada reduzida
0 −2/5 0
1
1/5 0 .
0
0 0
(4.1.10)
Assim a variável x3 pode ser uma variável livre que pode, portanto, assumir qualquer valor. Concluímos que o
−
−
−
sistema AX = 0 e a equação vectorial (4.1.9) têm solução não trivial. Portanto, →
v 1, →
v2 e →
v 3 são L.D.
A expressão “linearmente dependente” sugere que os vectores dependem uns dos outros em algum sentido. O
teorema seguinte mostra que este realmente é o caso.
−
−
Teorema 4.4 Um conjunto S = {→
v 1, . . . , →
v k } (k > 1) de vectores é linearmente dependente (L.D.) se, e somente
→
−
se, pelo menos um dos vectores, v j , for combinação linear dos outros vectores do S.
Demonstração:
Vamos dividir a demonstração em duas partes:
−
(a) Se →
v j é uma combinação linear dos demais vectores do conjunto S, isto é, se existem escalares α1 , · · · , αj−1 , αj+1 , · · · , αk
tais que
−
−
−
−
−
α1 →
v 1 + · · · + αj−1 →
v j−1 + αj+1 →
v j+1 + · · · + αk →
vk =→
v j,
→
−
então somando-se − v a ambos os membros ficamos com
j
→
−
−
−
−
−
−
v j−1 − →
v j + αj+1 →
v j+1 + · · · + αk →
vk = 0.
α1 →
v 1 + · · · + αj−1 →
(4.1.11)
→
−
−
−
−
Isto implica que a equação x1 →
v 1 + · · · + xk →
v k = 0 admite solução não trivial, pois o coeficiente de →
v j em
(4.1.11) é −1. Portanto, S é L.D.
(b) Se S é L.D., então a equação
→
−
−
−
−
x1 →
v 1 + x2 →
v 2 + · · · + xk →
vk= 0
(4.1.12)
admite solução não trivial, o que significa que
pelo menos um
xjé diferente de zero. Então, multiplicando-se a
xk →
→
−
−
1
equação (4.1.12) por 1/xj e subtraindo-se x
v
+
·
·
·
+
v k obtemos
1
x
x
j
→
−
vj =−
x1
xj
→
−
v 1 − ··· −
xj−1
xj
j
→
−
v j−1 −
xj+1
xj
→
−
v j+1 − · · · −
xk
xj
→
−
v k.
−
Portanto, um vector →
v j é combinação linear dos outros vectores do S.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
98
Capítulo 4. Espaços e Subespaços Rn
Observação 4.1 Na demonstração da segunda parte, vemos que o vector, cujo escalar na combinação linear puder
ser diferente de zero, pode ser escrito como combinação linear dos outros.
−
−
−
Exemplo 4.14 Sejam →
v 1 = (1, 2, 5), →
v 2 = (7, −1, 5) e →
v 3 = (1, −1, −1) vectores do R3 . Vamos escrever um dos
vectores como combinação linear dos outros dois. Vimos no Exemplo 3.28 que estes vectores são L.D. De (4.1.10)
segue que
→
−
−
−
−
x1 →
v 1 + x2 →
v 2 + x3 →
v3= 0
se, e somente se, x1 = (2/5)α, x2 = −(1/5)α e x3 = α, para todo α ∈ R. Substituindo-se os valores de x1 , x2 e x3
na equação acima, ficamos com
→
−
−
−
−
(2/5)α→
v 1 − (1/5)α→
v 2 + α→
v3 = 0.
Tomando-se α = 1, obtemos
→
−
−
−
−
(2/5)→
v 1 − (1/5)→
v 2+→
v3 = 0;
−
−
−
−
−
multiplicando-se por −5 e somando-se 2→
v 1 + 5→
v 3 , temos que →
v 2 = 2→
v 1 + 5→
v 3.
Observe que neste exemplo, qualquer dos vectores pode ser escrito como combinação linear dos outros. O próximo
exemplo mostra que isto nem sempre acontece.
Exemplo 4.15 Sejam
é combinação linear de
→
−
−
−
−
−
−
−
v 1 = (−2, −2, 2), →
v 2 = (−3, 3/2, 0) e →
v 3 = (−2, 1, 0). {→
v 1, →
v 2, →
v 3 } é L.D., mas →
v 1 não
→
−
→
−
v 2 e v 3.
Exercícios Numéricos
−
−
−
4.1.1 Quais dos seguintes vectores são combinação linear de →
x 1 = (4, 2, −3), →
x 2 = (2, 1, −2) e →
x 3 = (−2, −1, 0)?
(a)
(1, 1, 1)
(c)
(−2, −1, 1)
(b)
(4, 2, −6)
(d)
(−1, 2, 3)
4.1.2 Quais dos seguintes conjuntos de vectores são linearmente dependentes?
(a)
{(1, 1, 2), (1, 0, 0), (4, 6, 12)}
(c)
{(1, 1, 1), (2, 3, 1), (3, 1, 2)}
(b)
{(1, −2, 3), (−2, 4, −6)}
(d)
{(4, 2, −1), (6, 5, −5), (2, −1, 3)}
{(3, 1, 0), (λ2
4.1.3 Para quais valores de λ o conjunto de vectores
+ 2, 2, 0)} é L.D.?
→
−
→
−
→
−
4.1.4 Suponha que S = { x 1 , x 2 , x 3 } é um conjunto linearmente independente de vectores do Rn . Responda se
−
−
−
T = {→
y ,→
y ,→
y } é linearmente dependente ou independente nos seguintes casos:
1
2
3
−
−
−
−
−
−
−
−
−
(a) →
y1=→
x1+→
x 2, →
y2=→
x1 +→
x3 e →
y3=→
x2 +→
x 3;
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
(b) y 1 = x 1 , y 2 = x 1 + x 3 e y 3 = x 1 + x 2 + x 3 .
Exercícios usando o Matlabr
4.1.5 (a) Defina os vectores V1=[1,2,3], V2=[3,4,5] e V3=[5,6,7]. Defina o vector aleatório V=randi(3,1). Verifique se V é combinação linear de V1, V2 e V3.
(b) Defina a matriz aleatória M=randi(3,5). Verifique se os vectores definidos pelas colunas de M são combinação linear de V1, V2 e V3. Tente explicar o resultado.
(c) Verifique se V1, V2 e V3 são linearmente independentes. Se eles forem linearmente dependentes, escreva
um deles como combinação linear dos outros e verifique o resultado.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
99
Capítulo 4. Espaços e Subespaços Rn
Exercícios Teóricos
−
−
−
4.1.6 Suponha que {→
x 1, →
x 2, . . . , →
x n } é um conjunto de vectores do Rn linearmente independente. Mostre que
−
−
−
se A é uma matriz n × n não singular, então {A→
x 1 , A→
x 2 , . . . , A→
x n } também é um conjunto linearmente
independente.
−
−
−
−
−
−
4.1.7 Se os vectores não nulos →
u, →
v e→
w são L.D., então →
w é uma combinação linear de →
u e→
v?
4.2
Subespaço, Base e Dimensão
Sejam A uma matriz m × n e W ⊆ Rn o conjunto solução do sistema linear homogéneo AX = 0. Já vimos no
Teorema 1.8 na página 22 que o conjunto W satisfaz as seguintes propriedades:
(a) se X e Y pertencem a W, então X + Y também pertence a W;
(b) se X pertence a W, então αX também pertence a W para todo escalar α.
Recapitule como foi feita a demonstração dos items (a) e (b) acima no Teorema 1.8 na página 22. Assim, se X
e Y são soluções de um sistema homogéneo, então X + Y e αX também o são. Portanto, combinações lineares de
soluções de AX = 0 são também soluções de AX = 0.
O conjunto solução de um sistema homogéneo AX = 0 se comporta como se fosse ele próprio um espaço, no
sentido de que fazendo soma de vectores do conjunto ou multiplicando vectores do conjunto por escalar não “saímos”
dele. Por isso, ele é chamado de espaço solução do sistema homogéneo AX = 0.
Um subconjunto não vazio de Rn que satisfaz as propriedades (a) e (b) acima é chamado de subespaço de Rn .
Pois com relação às operações de soma de vectores e multiplicação por escalar podemos “viver” nele sem termos que
sair. Assim, o espaço solução do sistema homogéneo AX = 0 é um subespaço de Rn . Vale também a recíproca, todo
subespaço é o espaço solução de um sistema homogéneo (Exercício 4.2.18 na página 106).
Exemplo 4.16 Considere os sistemas lineares
(a)
(c)
0
0
0
1
−3
−2
0
0
0
0
x
0
0 y = 0
0
z
0
−2
7
4
3
x
0
−8 y = 0
−6
z
0
(b)
(d)
1
2
3
1
−3
4
−2
−4
−6
−2
7
1
3
x
0
6 y = 0
9
z
0
3
x
0
−8 y = 0 .
2
z
0
Todos são sistemas homogéneos, portanto os conjuntos solução são subespaços do R3 .
(a) A solução geral do primeiro sistema é o próprio R3 .
(b) A solução geral do segundo sistema é x = 2α − 3β, y = β e z = α, para todos α, β ∈ R, que é o plano
−
x − 2y + 3z = 0, que passa pela origem, com vector normal →
n = (1, −2, 3) (verifique!).
(c) A solução geral do terceiro sistema é x = −5t, y = −t e z = t, para todo t ∈ R, que é a recta que passa pela
−
origem, com vector director →
v = (−5, −1, 1).
→
−
(d) A solução do quarto sistema é x = 0, y = 0 e z = 0, que é somente a origem { 0 = (0, 0, 0)}.
−
−
Vamos ver que para todo sistema linear homogéneo AX = 0, existe um número finito de vectores →
v 1, . . . , →
vk
→
−
→
−
do espaço solução tais que toda solução de AX = 0 pode ser escrita como uma combinação linear de v 1 , . . . , v k .
Exemplo 4.17 Considere o sistema linear homogéneo AX = 0, em que
1
1
0
2
A = −2 −2
1 −5 .
1
1 −1
3
Escalonando a matriz ampliada do sistema acima,
1 1
0 0
0 0
Introdução à Álgebra Linear
obtemos a matriz escalonada reduzida
0
2 0
1 −1 0 .
0
0 0
Opto, Qui Ind, Mat
2007/2008
100
Capítulo 4. Espaços e Subespaços Rn
E assim a solução geral do sistema pode ser escrita como
x1 = −α − 2β, x2 = α, x3 = β, x4 = β,
para todos os valores de α, β ∈ R, ou seja, o conjunto solução do sistema AX = 0 é
W = {(x1 , x2 , x3 , x4 ) = (−α − 2β, α, β, β) : α, β ∈ R}.
Agora, um elemento qualquer do W pode ser escrito como uma soma de vectores do W, sendo que cada vector
depende apenas de um parâmetro, obtendo
(−α − 2β, α, β, β) = (−α, α, 0, 0) + (−2β, 0, β, β) = α(−1, 1, 0, 0) + β(−2, 0, 1, 1).
−
−
Assim, todo o vector do W pode ser escrito como combinação linear dos vectores →
v 1 = (−1, 1, 0, 0) e →
v2 =
→
−
→
−
(−2, 0, 1, 1) pertencentes a W ( v 1 é obtido fazendo-se α = 1 e β = 0 e v 2 fazendo-se α = 0 e β = 1). Neste caso
−
−
dizemos que →
v 1 = (−1, 1, 0, 0) e →
v 2 = (−2, 0, 1, 1) geram o subespaço W.
Em geral temos a seguinte definição.
Definição 4.5 Seja W um subespaço de Rn (por exemplo, o espaço solução de um sistema linear homogéneo
−
−
−
−
AX = 0). Dizemos que os vectores →
v 1, . . . , →
v k pertencentes a W, geram W ou que {→
v 1, . . . , →
v k } é um conjunto
−
−
de geradores do W, se qualquer vector do W é combinação linear de →
v 1, . . . , →
v k . Dizemos também que W é o
−
−
subespaço gerado por →
v 1, . . . , →
v k.
−
Exemplo 4.18 Seja V = {(a + c, b + c, a + b + 2c) : a, b, c ∈ R} um subespaço do R3 . Qualquer elemento →
v de V
pode ser escrito como uma soma de vectores, sendo um vector para cada parâmetro e cada vector depende apenas
de um parâmetro, obtendo
→
−
v = (a + c, b + c, a + b + 2c)
=
(a, 0, a) + (0, b, b) + (c, c, 2c)
=
a(1, 0, 1) + b(0, 1, 1) + c(1, 1, 2).
−
−
−
−
−
−
Logo, definindo →
v 1 = (1, 0, 1), →
v 2 = (0, 1, 1) e →
v 3 = (1, 1, 2), então {→
v 1, →
v 2, →
v 3 } gera V.
−
−
−
−
Exemplo 4.19 No Exemplo 4.17 os vectores →
v 1 = (−1, 1, 0, 0) e →
v 2 = (−2, 0, 1, 1) geram W ou {→
v 1 = (−1, 1, 0, 0), →
v2 =
(−2, 0, 1, 1)} é um conjunto de geradores do W. Além disso, eles são linearmente independentes, pois um não é
−
−
múltiplo escalar do outro. Neste caso dizemos que {→
v 1, →
v 2 } é uma base do W.
Em geral temos a seguinte definição.
Definição 4.6 Seja W um subespaço de Rn (por exemplo, o espaço solução de um sistema linear homogéneo
−
−
AX = 0). Dizemos que um subconjunto {→
v 1, . . . , →
v k } do W é uma base do W, se
→
−
→
−
−
−
(a) { v , . . . , v } é um conjunto de geradores do W, ou seja, todo vector do W é combinação linear de →
v ,...,→
v
1
1
k
k
e
−
−
(b) {→
v 1, . . . , →
v k } é L.I..
−
−
−
Exemplo 4.20 Os vectores →
e 1 = (1, 0, . . . , 0), →
e 2 = (0, 1, 0, . . . , 0), · · · , →
e n = (0, . . . , 0, 1) formam uma base do
→
−
n
n
R . Pois, um vector qualquer do R é da forma v = (a1 , . . . , an ) e pode ser escrito como uma soma de vectores,
sendo um vector para cada parâmetro e cada vector dependendo apenas de um parâmetro, obtendo
→
−
v = (a1 , . . . , an )
=
(a1 , 0, . . . , 0) + (0, a2 , 0, . . . , 0) + · · · + (0, . . . , 0, an )
=
a1 (1, 0, . . . , 0) + a2 (0, 1, 0, . . . , 0) + · · · + an (0, . . . , 0, 1).
−
−
−
Assim, os vectores →
e 1 = (1, 0, . . . , 0), →
e 2 = (0, 1, 0, . . . , 0), · · · ; →
e n = (0, . . . , 0, 1) geram o Rn .
−
−
−
Vimos no Exemplo 4.10 na página 96 que →
e 1, →
e 2, . . . , →
e n são L.I. Esses vectores formam a chamada base
→
−
→
− −
→
− −
−
canónica de Rn . No caso do R3 , →
e 1 = i ,→
e2= j e →
e3= k.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
101
Capítulo 4. Espaços e Subespaços Rn
−
Exemplo 4.21 Seja W = {(−2α, α − 3β, 2β) : α, β ∈ R} um subespaço do R3 . Qualquer elemento →
v do W pode
ser escrito como uma soma de vectores do W, sendo um vector para cada parâmetro e cada vector depende apenas
de um parâmetro, obtendo
→
−
v = (−2α, α − 3β, 2β) = (−2α, α, 0) + (0, −3β, 2β) = α(−2, 1, 0) + β(0, −3, 2).
−
−
Logo →
v 1 = (−2, 1, 0) e →
v 2 = (0, −3, 2) geram W. Além disso, eles são L.I. pois um não é múltiplo escalar do
→
−
→
−
outro. Portanto, { v 1 , v 2 } é uma base do W. Observe que este subespaço é um plano que passa pela origem. Qual
é o seu vector normal e qual é a sua equação geral?
Exemplo 4.22 Seja W = {(x, y, z) = t(a, b, c) : t ∈ R} uma recta que passa pela origem. Como o vector director
→
−
−
v = (a, b, c) é não nulo e gera todos os pontos da recta, então {→
v } é uma base do W.
Exemplo 4.23 Seja W = {(x, y, z) ∈ R3 : ax + by + cz = 0} um plano que passa pela origem.
Vamos supor que a 6= 0. Um ponto (x, y, z) satisfaz a equação ax + by + cz = 0 se, e somente se,
1
z = α, y = β, x = − (cα + bβ),
a
para todos α, β ∈ R.
Assim, o plano W pode ser descrito como W = {(− ac α − ab β, β, α) : α, β ∈ R}. Assim, todo vector do W pode
ser escrito como uma soma de vectores, sendo um para cada parâmetro, obtendo
c
b
c
b
(− α − β, β, α) = α(− , 0, 1) + β(− , 1, 0).
a
a
a
a
−
−
v2 =
Assim, todo vector do W pode ser escrito como uma combinação linear dos vectores →
v 1 = − ac , 0, 1 e →
−
−
(− ab , 1, 0) pertencentes a W (→
v 1 é obtido fazendo-se α = 1 e β = 0 e →
v 2 , fazendo-se α = 0 e β = 1). Portanto,
→
−
−
−
−
v 1 = (− ac , 0, 1) e →
v 2 = (− ab , 1, 0) geram o plano W. Como →
v1 e→
v 2 são L.I., pois um não é múltiplo escalar do
→
−
→
−
outro, então { v 1 , v 2 } é uma base do plano W. Deixamos como exercício para o leitor encontrar uma base do W
para o caso em que b 6= 0 e também para o caso em que c 6= 0.
Exemplo 4.24 Sejam W o plano x + y + z = 0 e V o plano 4x − 2y + z = 0. Assim, o plano W tem vector normal
→
−
−
n 1 = (1, 1, 1) e o plano V tem vector normal →
n 2 = (4, −2, 1).
Vamos encontrar as equações paramétricas da recta V ∩ W, intersecção dos planos determinando a solução geral
do sistema
W:
x + y + z = 0,
V:
4x − 2y + z = 0.
(4.2.13)
Para isto devemos escalonar a matriz do sistema (4.2.13):
#
"
1
1 1 0
.
4 −2 1 0
Precisamos anular o outro elemento da 1a . coluna, que é a coluna do pivot. Para isto, adicionamos à 2a . linha,
-4 vezes a 1a . linha.
"
#
1
1
1 0
a
a
a
.
−4 ∗ 1 linha + 2 linha −→ 2 linha
0 −6 −3 0
Agora, já podemos obter facilmente a solução geral do sistema dado, já que ele é equivalente ao sistema
(
x +
y
+
z
= 0
.
−6y − 3z = 0
A variável z é uma variável livre. Podemos dar a ela um valor arbitrário, digamos t, para t ∈ R qualquer.
Assim, a solução geral do sistema (4.2.13) é
1
x = −2t
para todo t ∈ R.
y = − 12 t
z =
t
A recta que é a intersecção, V ∩ W, tem equação (x, y, z) = t(−1/2, −1/2, 1), para todo t ∈ R (recapitule o
−
Exemplo 3.23 na página 75). Assim, a intersecção W ∩ V é a recta cujo vector director é →
v = (−1/2, −1/2, 1) e que
→
−
passa pela origem. Portanto, o vector v = (−1/2, −1/2, 1) gera a intersecção V ∩ W. Como um vector não nulo é
−
L.I. o conjunto {→
v = (−1/2, −1/2, 1)} é uma base da recta que é a intersecção V ∩ W.
Observação 4.2 Como no exemplo anterior, em geral, o espaço solução de um sistema linear homogéneo pode ser
visto como uma intersecção de subespaços que são as soluções de sistemas formados por subconjuntos de equações
do sistema inicial.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
102
Capítulo 4. Espaços e Subespaços Rn
Teorema 4.5 Sejam A e B matrizes m × n equivalentes por linhas. Sejam A1 , . . . , An as colunas 1, . . . , n, respectivamente, da matriz A e B1 , . . . , Bn as colunas 1, . . . , n, respectivamente, da matriz B.
(a) Bj1 , . . . , Bjk , são L.I. se, e somente se, Aj1 , . . . , Ajk , também o são.
(b) Se existem escalares αj1 , . . . , αjk tais que
Ak = αj1 Aj1 + · · · + αjk Ajk ,
então
Bk = αj1 Bj1 + · · · + αjk Bjk .
(c) O subespaço gerado pelas linhas de A é igual ao subespaço gerado pelas linhas de B.
Demonstração:
Se B é equivalente por linhas a A, então B pode ser obtida de A aplicando-se uma sequência de operações
elementares. Aplicar uma operação elementar a uma matriz corresponde a multiplicar a matriz à esquerda por uma
matriz invertível (ver o livro do Professor Reginaldo Santos “Introdução à Álgebra Linear” (Maio 2004), Teorema
1.8 na página 58). Seja M o produto das matrizes invertíveis correspondentes às operações elementares aplicadas na
matriz A para se obter a matriz B. Então M é invertível e B = M A.
(a) Vamos supor que Bj1 , . . . , Bjk são L.I. e vamos mostrar que Aj1 , . . . , Ajk também o são. Se
xj1 Aj1 + · · · + xjk Ajk = 0,
então multiplicando-se à esquerda pela matriz M obtemos
xj1 M Aj1 + · · · + xjk M Ajk = 0.
Como M Aj = Bj , para j = 1, . . . , n (Exercício 1.1.18 (a) na página 9), então
xj1 Bj1 + · · · + xjk Bjk = 0.
Assim, se Bj1 , . . . , Bjk são L.I., então xj1 = . . . = xjk = 0. O que implica que Aj1 , . . . , Ajk também são L.I.
Trocando-se B por A o argumento acima mostra que se Aj1 , . . . , Ajk são L.I., então Bj1 , . . . , Bjk também o são.
(b) Sejam αj1 , . . . , αjk escalares tais que
Ak = αj1 Aj1 + · · · + αjk Ajk ,
então multiplicando-se à esquerda pela matriz M obtemos
M Ak = αj1 M Aj1 + · · · + αjk M Ajk .
Como M Aj = Bj , para j = 1, . . . , n (Exercício 1.1.18 (a) na página 9), então
Bk = αj1 Bj1 + · · · + αjk Bjk .
(c) A matriz B é obtida de A aplicando-se uma sequência de operações elementares às linhas de A. Assim, toda
linha de B é uma combinação linear das linhas de A. Logo, o espaço gerado pelas linhas de B está contido no
espaço gerado pelas linhas de A. O mesmo argumento mostra que o espaço gerado pelas linhas de A está contido
no espaço gerado pelas linhas de B. Portanto, eles são iguais.
−
Exemplo 4.25 Seja V = {(a + c, b + c, a + b + 2c) : a, b, c ∈ R} um subespaço de R3 . Qualquer elemento →
v de V
pode ser escrito como uma soma de vectores, sendo um vector para cada parâmetro e cada vector depende apenas
de um parâmetro, obtendo
→
−
v = (a + c, b + c, a + b + 2c)
=
(a, 0, a) + (0, b, b) + (c, c, 2c)
=
a(1, 0, 1) + b(0, 1, 1) + c(1, 1, 2).
−
−
−
−
−
−
Logo, definindo →
v 1 = (1, 0, 1), →
v 2 = (0, 1, 1) e →
v 3 = (1, 1, 2), então {→
v 1, →
v 2, →
v 3 } gera V. Para sabermos se
−
−
−
−
−
−
{→
v 1, →
v 2, →
v 3 } é base de V, precisamos verificar se →
v 1, →
v2 e →
v 3 são L.I. Para isto temos que saber se a equação
vectorial
−
−
−
x→
v 1 + y→
v 2 + z→
v3=0
(4.2.14)
só possui a solução trivial, ou equivalentemente, se o sistema AX = 0 só possui a solução trivial, onde A =
−
−
−
[→
v1 →
v2 →
v 3 ]. Escalonando a matriz [A|0], obtemos
1 0 1 0
[R|0] = 0 1 1 0
0 0 0 0
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
103
Capítulo 4. Espaços e Subespaços Rn
−
−
−
que tem solução não trivial. Logo os vectores →
v 1, →
v2 e→
v 3 são L.D.
Como a terceira coluna da matriz R é igual a soma da primeira com a segunda, pelo Teorema 4.5 (b) a mesma
−
−
−
−
relação vale para as colunas correspondentes da matriz A, ou seja, →
v3 =→
v2+→
v 1 . Assim o vector →
v 3 pode ser
→
−
→
−
descartado na geração de V, pois ele é combinação linear dos outros dois. Logo, apenas v 1 e v 2 são suficientes
−
−
para gerar V. Como além disso os vectores →
v1 e→
v 2 são tais que um não é múltiplo escalar do outro, então eles são
−
−
L.I. (também pelo Teorema 4.5 (a), pois as duas primeiras colunas de R são claramente L.I.) e portanto {→
v 1, →
v 2}
é uma base de V.
Vamos mostrar a seguir que o número de vectores de uma base de um subespaço W é o maior número possível
de vectores linearmente independentes em W.
Teorema 4.6 Seja W um subespaço de Rn (por exemplo, o espaço solução de um sistema linear homogéneo AX =
−
−
0). Seja {→
v 1, . . . , →
v m } uma base do W. Então, um conjunto com mais de m vectores em W é L.D.
Demonstração:
−
−
−
−
Seja {→
w 1, . . . , →
w p } um subconjunto do W, com p > m. Vamos mostrar que {→
w 1, . . . , →
w p } é L.D. Considere a
→
−
→
−
combinação linear nula de w 1 , . . . , w p
−
−
−
x1 →
w 1 + x2 →
w 2 + · · · + xp →
w p = 0.
(4.2.15)
−
−
Como {→
v 1, . . . , →
v m } é uma base do W, qualquer elemento do W pode ser escrito como combinação linear de
→
−
−
v 1, . . . , →
v m . Em particular,
−
→
−
−
−
vm=
v 2 + · · · + bmj →
w j = b1j →
v 1 + b2j →
m
X
bij Vi ,
i=1
para j = 1, · · · , p.
(4.2.16)
−
Assim, substituindo (4.2.16) em (4.2.15) e agrupando os termos que contém →
v i , para i = 1, · · · , m, obtemos
−
−
(b11 x1 + · · · + b1p xp )→
v 1 + · · · + (bm1 x1 + · · · + bmp xp )→
v m = 0.
(4.2.17)
−
−
−
−
Como {→
v 1, . . . , →
v m } é base do W, →
v 1, . . . , →
v m são L.I. e portanto os escalares na equação (4.2.17) são iguais
a zero. Isto leva ao sistema linear
BX = 0,
em que B = (bij )m×p . Mas, este é um sistema homogéneo que tem mais incógnitas do que equações, portanto possui
solução não trivial, (Teorema 1.7 na página 21), como queríamos provar.
Segue imediatamente do Teorema 4.6 o seguinte resultado.
Corolário 4.6.1 Em Rn um conjunto com mais de n vectores é L.D.
Segue do Teorema 4.6 que se W é um subespaço, então qualquer base do W tem o mesmo número de elementos
e este é o maior número de vectores L.I. que podemos ter em W. O número de elementos de qualquer uma das bases
→
−
do W é chamado de dimensão do W. Se W = { 0 } dizemos que W tem dimensão igual a 0.
−
−
Exemplo 4.26 A dimensão do Rn é n, pois como foi mostrado no Exemplo 4.20 na página 100, →
e 1 = (1, 0, . . . , 0), →
e2=
→
−
n
(0, 1, 0, . . . , 0), . . . , e n = (0, . . . , 0, 1) formam uma base do R .
Exemplo 4.27 A dimensão do subespaço V = {(a + c, b + c, a + b + 2c) : a, b, c ∈ R} é 2 pois como foi mostrado
−
−
no Exemplo 4.25, {→
v 1 = (−2, 1, 0), →
v 2 = (0; −3, 2)} é uma base para V.
Exemplo 4.28 Pelo Exemplo 4.22 na página 101 uma recta que passa pela origem tem dimensão 1 e pelo Exemplo
4.23 na página 101 um plano que passa pela origem tem dimensão 2.
−
−
Teorema 4.7 Seja W um subespaço de dimensão m > 0. Se →
v 1, . . . , →
v m ∈ W são L.I., então eles geram o
subespaço W e portanto formam uma base do W.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
104
Capítulo 4. Espaços e Subespaços Rn
Demonstração:
−
−
−
−
Sejam →
v 1, . . . , →
v m vectores L.I. e seja →
v um vector qualquer do subespaço W. Vamos mostrar que →
v é
→
−
→
−
combinação linear de v 1 , . . . , v m . Considere a equação vectorial
→
−
−
−
−
−
x1 →
v 1 + x2 →
v 2 + . . . + xm →
v m + xm+1 →
v = 0
(4.2.18)
−
−
−
Pelo Teorema 4.6 na página 103, →
v 1, . . . , →
v m, →
v são L.D., pois são m + 1 vectores em um subespaço de
dimensão m. Então a equação (4.2.18) admite solução não trivial, ou seja, pelo menos um xi 6= 0. Mas, xm+1 6= 0,
−
−
pois caso contrário, →
v 1, . . . , →
v m seriam L.D. Então, multiplicando-se a equação (4.2.18) por 1/xm+1 e subtraindo
→
−
→
−
−
(x1 /xm+1 ) v 1 + (x2 /xm+1 ) v 2 + . . . + (xm /xm+1 )→
v m , obtemos
x1
x1
→
−
→
−
→
−
v 1 − ··· −
v m.
v =−
xm+1
xm+1
Dos resultados anteriores, vemos que se a dimensão de um subespaço, W, é m > 0, então basta conseguirmos
m vectores L.I. em W, que teremos uma base (Teorema 4.7) e não podemos conseguir mais do que m vectores L.I.
(Teorema 4.6 na página 103).
Exemplo 4.29 Do Teorema 4.7 segue que n vectores L.I. do Rn formam uma base de Rn . Por exemplo, 3 vectores
L.I. do R3 formam uma base de R3 .
−
−
Exemplo 4.30 Considere os vectores →
v 1 = (−1, 1, 0, −3) e →
v 2 = (−3, 3, 2, −1) linearmente independentes de R4 .
−
−
−
−
−
−
−
−
Vamos encontrar vectores →
v3 e →
v 4 tais que {→
v 1, →
v 2, →
v 3, →
v 4 } formam uma base de R4 . →
v1 e →
v 2 são L.I., pois
→
−
→
−
um não é múltiplo escalar do outro. Escalonando a matriz cujas linhas são os vectores v 1 e v 2 ,
"
#
−1 1 0 −3
A=
,
−3 3 2 −1
obtemos
#
0 3
.
1 4
−
−
Pelo Teorema 4.5 (c) o subespaço gerado pelos vectores →
v1 e→
v 2 (as linhas de A) é igual ao subespaço gerado
→
−
→
−
por w 1 = (1, −1, 0, 3) e w 2 = (0, 0, 1, 4) (as linhas de R). Vamos inserir linhas na matriz R até conseguir uma
matriz 4 × 4 de forma que ela continue escalonada reduzida. Por exemplo, podemos obter a matriz
1 −1 0 3
0
1 0 0
R′ =
.
0
0 1 4
0
0 0 1
R=
"
1
0
−1
0
−
−
−
−
−
Sejam →
v 3 = (0, 1, 0, 0) e →
v 4 = (0, 0, 0, 1). Vamos verificar que →
v 1 = (−1, 1, 0, −3), →
v 2 = (−3, 3, 2, −1), →
v3 =
→
−
(0, 1, 0, 0) e v 4 = (0, 0, 0, 1) são L.I.
→
−
−
−
−
−
x1 →
v 1 + x2 →
v 2 + x3 →
v 3 + x4 →
v4 = 0
implica que
−
−
−
−
x1 →
v 1 + x2 →
v 2 = −x3 →
v 3 − x4 →
v4
→
−
→
−
→
−
→
−
−
Como v 3 e v 4 não pertencem ao subespaço gerado por v 1 e v 2 que é o mesmo subespaço gerado por →
w1 e
→
−
w 2 , então
→
−
→
−
−
−
−
−
x1 →
v 1 + x2 →
v 2 = 0 e − x3 →
v 3 − x4 →
v4 = 0.
−
−
−
−
−
−
−
−
Como {→
v 1, →
v 2 } é L.I. assim como {→
v 3, →
v 4 } então x1 = x2 = x3 = x4 = 0. Logo {→
v 1, →
v 2, →
v 3, →
v 4 } é L.I.
−
−
−
−
Como a dimensão do R4 é igual a 4 , então pelo Teorema 4.7 →
v ,→
v ,→
v ,→
v formam uma base de R4 .
1
2
3
4
Exercícios Numéricos
4.2.1 Encontre umconjunto
1 0
(a)
A= 1 2
2 1
de
1
3
3
geradores
para o espaço solução do sistema homogéneo
AX = 0,
0
1 1
(b) A =
2 3
1
1
−2 1
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
em que
2 −1
6 −2
2
2
2007/2008
105
Capítulo 4. Espaços e Subespaços Rn
4.2.2 Encontre os valores de λ tais que o sistema homogéneo (A − λIn )X = 0 tem solução não trivial e para estes
valores de λ, encontre uma base para o espaço solução, para as matrizes A dadas:
(a)
(b)
(c)
0
A= 1
0
2
0
A=
0
0
1
−3
3
0
0
1
2
2
0
0
1
A = −1
0
3
3
1
0
1
2
1
4
2
1
1
−2
1
−1
(d)
(e)
(f)
−1
−1
A=
−1
0
2
A= 0
0
2
A= 0
0
2
2
1
0
3
1
0
3
2
0
2
1
2
0
0
0
2
0
0
2
0
0
0
1
4.2.3 Determine uma base para a recta intersecção dos planos x − 7y + 5z = 0 e 3x − y + z = 0.
−
−
−
4.2.4 Sejam →
v 1 = (4, 2, −3), →
v 2 = (2, 1, −2) e →
v 3 = (−2, −1, 0).
−
−
−
(a) Mostre que →
v 1, →
v2 e→
v 3 são L.D.
→
−
→
−
(b) Mostre que v e v são L.I.
1
2
−
−
−
(c) Qual a dimensão do subespaço gerado por →
v 1, →
v2 e →
v 3 , ou seja, do conjunto das combinações lineares
−
−
−
de →
v 1, →
v2 e→
v 3.
−
−
−
(d) Descreva geometricamente o subespaço gerado por →
v 1, →
v2 e→
v 3.
−
−
4.2.5 Dados →
v 1 = (2, 1, 3) e →
v 2 = (2, 6, 4):
−
−
(a) Os vectores →
v1 e→
v 2 geram o R3 ? Justifique.
→
−
−
−
−
−
(b) Seja v 3 um terceiro vector do R3 . Quais as condições sobre →
v 3 , para que {→
v 1, →
v 2, →
v 3 } seja uma base
3
de R ?
−
−
−
(c) Encontre um vector →
v que complete junto com →
v e→
v uma base do R3 .
3
1
2
−
−
−
−
−
4.2.6 Seja W o plano x + 2y + 4z = 0. Obtenha uma base {→
v 1, →
v 2, →
v 3 } de R3 tal que →
v1 e→
v 2 pertençam a W.
4.2.7 Considere os seguintes subespaços de R3 :
V = h(−1, 2, 3), (1, 3, 4)i
e
W = h(1, 2, −1), (0, 1, 1)i .
− →
Encontre as equações paramétricas da recta V ∩ W e uma base para o subespaço V ∩ W. A notação →
v 1, −
v2
−
−
−
−
significa o subespaço gerado por →
v1 e→
v 2 , ou seja, o conjunto de todas as combinações lineares de →
v1 e→
v 2.
4.2.8 Seja V = {(3a + 4b − 4c, 2a − 4b − 6c, −2a − 4b + 2c) : a, b, c ∈ R} um subespaço de R3 .
(a) Determine um conjunto de geradores para V.
(b) Determine uma base para V.
−
−
4.2.9 Dados →
v 1 = (−3, 5, 2, 1) e →
v 2 = (1, −2, −1, 2):
−
−
(a) Os vectores →
v1 e→
v 2 geram o R4 ? Justifique.
−
−
−
−
−
−
−
−
(b) Sejam →
v3e→
v 4 vectores do R4 . Quais as condições sobre →
v3e→
v 4 para que {→
v 1, →
v 2, →
v 3, →
v 4 } seja uma
base do R4 ?
−
−
−
−
(c) Encontre vectores →
v e→
v que complete junto com →
v e→
v uma base do R4 .
3
4
1
2
Exercícios usando o Matlabr
4.2.10 Defina a matriz aleatória A=triu(randi(4,4,3)). Encontre os valores de λ tais que o sistema homogéneo
(A-λ I4 )X=0 tem solução não trivial e para estes valores de λ, encontre uma base para o espaço solução.
Exercícios Teóricos
4.2.11 Seja A uma matriz m × n. Mostre que se o conjunto solução do sistema linear AX = B é um subespaço,
então B = 0, ou seja, o sistema linear é homogéneo. (Sugestão: se X é solução de AX = B, então Y = 0X
também o é.)
4.2.12 Determine uma base para o plano ax + by + cz = 0, se b 6= 0 e se c 6= 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
106
Capítulo 4. Espaços e Subespaços Rn
−
−
−
−
4.2.13 Sejam →
v e→
w vectores do Rn . Mostre que o conjunto dos vectores da forma α→
v + β→
w é um subespaço do
n
R .
4.2.14 Mostre que se uma recta em R2 ou em R3 não passa pela origem, então ela não é um subespaço. (Sugestão:
se ela fosse um subespaço, então ...)
y
x
→
−
→
−
4.2.15 Sejam A uma matriz m × n e b uma matriz m × 1. Mostre que o conjunto dos vectores b para os quais o
→
−
→
−
m
sistema A x = b tem solução é um subespaço do R . Ou seja, mostre que o conjunto
→
−
→
−
−
−
J (A) = { b ∈ Rm : b = A→
x , para algum →
x ∈ Rn }
é um subespaço de Rm .
−
−
−
−
−
4.2.16 Sejam →
v 1, . . . , →
v k+1 vectores do Rn tais que {→
v 1, . . . , →
v k } é linearmente independente. Mostre que se →
v k+1
→
−
→
−
→
−
não
pertence
ao
subespaço
gerado
por
{ v 1 , . . . , v k },
então
{ v 1, . . . ,
→
−
→
−
−
−
v k+1 } é linearmente independente. (Sugestão: considere a equação x1 →
v 1 + · · · + xk+1 →
v k+1 = 0 . Se
xk+1 = 0, então x1 = . . . = xk = 0.)
4.2.17 Sejam W1 e W2 dois subespaços.
(a) Mostre que W1 ∩ W2 é um subespaço.
(b) Mostre que W1 ∪ W2 é um subespaço se, e somente se, W1 ⊆ W2 ou W2 ⊆ W1 .
(c) Definimos a soma dos subespaços W1 e W2 por
−
−
−
W1 + W2 = {→
v1+→
v2 : →
v 1 ∈ W1
e
→
−
v 2 ∈ W2 }.
Mostre que W1 + W2 é um subespaço que contém W1 e W2 .
−
−
−
−
−
−
4.2.18 Seja W um subespaço de Rn . Seja {→
w 1, . . . , →
w k } uma base do W. Seja B = [→
w1 ··· →
w k ]T , com →
w 1, . . . , →
wk
→
−
−
escritos como matrizes colunas. Seja W⊥ o espaço solução do sistema homogéneo B →
x = 0 , ou seja,
→
−
−
−
W⊥ = {→
x ∈ Rk : B →
x = 0 }.
−
−
−
−
−
−
Seja {→
v 1, . . . , →
v p } uma base de W⊥ . Seja A = [→
v 1 ···→
v p ]T , com →
v 1, . . . , →
v p escritos como matrizes colunas.
→
−
→
−
Mostre que W é o espaço solução do sistema homogéneo A x = 0 , ou seja,
→
−
−
−
W = {→
x ∈ R p : A→
x = 0 }.
Apêndice III: Outros Resultados
−
−
−
Teorema 4.8 Um subconjunto {→
v 1, →
v 2, . . . , →
v m } de um subespaço W é uma base para W se, e somente se, todo
−
−
−
−
vector →
x do W é escrito de maneira única como combinação linear de →
v 1, →
v 2, . . . , →
v m.
Demonstração:
−
Em primeiro lugar, suponha que todo vector →
x do W é escrito de maneira única como combinação linear de
→
−
→
−
→
−
→
−
→
−
v 1 , . . . , v m . Vamos mostrar que { v 1 , v 2 , . . . , v m } é uma base do W. Como todo vector é escrito como combinação
−
−
−
−
linear de →
v 1, . . . , →
v m , basta mostrarmos que →
v 1, . . . , →
v m são L.I. Considere a equação
→
−
→
−
−
x1 v 1 + · · · + xm →
vm = 0.
−
−
Como todo vector é escrito de maneira única como combinação linear de →
v 1, . . . , →
v m , em particular temos que
→
−
−
para →
x = 0,
→
−
−
−
−
−
x1 →
v 1 + · · · + xm →
v m = 0 = 0→
v 1 + · · · + 0→
v m,
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
Capítulo 4. Espaços e Subespaços Rn
107
−
−
−
−
−
o que implica que x1 = 0, . . . , xm = 0, ou seja, →
v 1, . . . , →
v m são linearmente independentes. Portanto, {→
v 1, →
v 2, . . . , →
v m}
é base do W.
−
−
−
−
Suponha, agora, que {→
v 1, →
v 2, . . . , →
v m } é base do W. Seja →
x um vector qualquer do W. Se
−
−
−
−
−
x1 →
v 1 + · · · + xm →
vm=→
x = y1 →
v 1 + · · · + ym →
v m,
então
→
−
−
−
(x1 − y1 )→
v 1 + · · · + (xm − ym )→
vm= 0
−
−
Como →
v 1, . . . , →
v m formam uma base do W, então eles são L.I., o que implica que x1 =
−
= y1 , . . . , xm = ym . Portanto, todo vector →
x do W é escrito de maneira única como combinação linear de
→
−
→
−
v 1, . . . , v m.
−
−
Teorema 4.9 Se S = {→
v 1, . . . , →
v k } é um conjunto de vectores que gera um subespaço W, ou seja, W = hSi =
→
−
→
−
v 1 , . . . , v k , então existe um subconjunto de S que é base do W.
Demonstração:
Se S é L.I., então S é uma base do W. Caso contrário, S é L.D. e pelo Teorema 4.4 na página 97 um dos
vectores do S é combinação linear dos outros. Assim, o subconjunto de S obtido retirando-se este vector continua
gerando W. Se esse subconjunto for L.I., temos uma base para W, caso contrário, continuamos retirando vectores do
subconjunto até obtermos um subconjunto L.I. e aí neste caso temos uma base para W.
Vamos mostrar que se a dimensão de um subespaço W é m, então m vectores que geram o subespaço, W, formam
uma base (Corolário 4.9.1) e que não podemos ter menos que m vectores gerando o subespaço (Corolário 4.9.2).
São simples as demonstrações dos seguintes corolários, as quais deixamos como exercício.
Corolário 4.9.1 Em um subespaço, W, de dimensão m > 0, m vectores que geram o subespaço, são L.I. e portanto
formam uma base.
Corolário 4.9.2 Em um subespaço, W, de dimensão m > 0, um conjunto com menos de m vectores não gera o
subespaço.
−
−
Teorema 4.10 Se R = {→
v 1, . . . , →
v k } é um conjunto de vectores L.I. em um subespaço W do Rn , então o conjunto
−
−
−
−
R pode ser completado até formar uma base do W, ou seja, existe um conjunto S = {→
v 1, . . . , →
v k, →
v k+1 , . . . , →
v m}
(R ⊆ S), que é uma base do W.
Demonstração:
−
−
−
−
−
Se {→
v 1, . . . , →
v k } gera W, então {→
v 1, . . . , →
v k } é uma base do W. Caso contrário, seja →
v k+1 um vector que
→
−
→
−
−
−
−
pertence a W, mas não pertence ao subespaço gerado por { v 1 , . . . , v k }. Então, o conjunto {→
v 1, . . . , →
v k, →
v k+1 }
→
−
→
−
→
−
→
−
é L.I., pois caso contrário x1 v 1 + · · · + xk+1 v k+1 = 0 , implicaria que xk+1 6= 0 (por quê?) e assim, v k+1 seria
−
−
−
−
−
combinação linear de →
v 1, . . . , →
v k , ou seja, →
v k+1 pertenceria ao subespaço W. Se {→
v 1, . . . , →
v k+1 } gera W, então
−
−
{→
v 1, . . . , →
v k+1 } é uma base do W. Caso contrário, o mesmo argumento é repetido para o subespaço gerado por
−
−
−
{→
v 1, . . . , →
v k, →
v k+1 }.
Pelo Corolário 4.6.1 na página 103 este processo tem que parar, ou seja, existe um inteiro positivo m ≤ n
−
−
−
−
−
−
−
−
−
tal que {→
v 1, . . . , →
v k, →
v k+1 , . . . , →
v m } é L.I., mas {→
v 1, . . . , →
v k, →
v k+1 , . . . , →
v m, →
v } é L.D. para qualquer vector
→
−
→
−
→
−
→
−
→
−
−
v do W. O que implica que v é combinação linear de { v 1 , . . . , v k , v k+1 , . . . , →
v m } (por quê?). Portanto,
→
−
→
−
→
−
→
−
{ v 1 , . . . , v k , v k+1 , . . . , v m } é uma base do W.
→
−
Corolário 4.10.1 Todo subespaço de Rn diferente do subespaço trivial { 0 } tem uma base e a sua dimensão é
menor ou igual a n.
Teorema 4.11 Se R = (rij )m×n e S = (sij )m×n são matrizes escalonadas reduzidas equivalentes por linhas a uma
matriz A = (aij )m× n , então R = S.
Demonstração:
Sejam S e R matrizes escalonadas reduzidas equivalentes a A. Sejam R1 , . . . , Rn as colunas de R e S1 , . . . , Sn
as colunas de S. Seja r o número de linhas não nulas de R. Sejam j1 , . . . , jr as colunas onde ocorrem os pivots
das linhas 1, . . . , r, respectivamente, da matriz R. Pelo Teorema 1.6 na página 21, R e S são equivalentes por linha,
ou seja, existe uma sequência de operações elementares que podemos aplicar em R para chegar a S e uma outra
sequência de operações elementares que podemos aplicar a S e chegar a R.
Assim, como as colunas 1, . . . , j1 − 1 de R são nulas o mesmo vale para as colunas 1, . . . , j1 − 1 de S. Logo o
pivot da 1a . linha de S ocorre numa coluna maior ou igual a j1 . Trocando-se R por S e usando este argumento
chegamos a conclusão que Rj1 = Sj1 e assim R1 = S1 , . . . , Rj1 = Sj1 .
Vamos supor que R1 = S1 , . . . , Rjk = Sjk e vamos mostrar que
Rjk +1 = Sjk +1 , . . . , Rjk +1 = Sjk +1 , se k < r ou
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
108
Capítulo 4. Espaços e Subespaços Rn
Rjr +1 = Sjr +1 , . . . , Rn = Sn , se k = r.
Observe que para j = jk + 1, . . . , jk+1 − 1, se k < r, ou para j = jr + 1, . . . , n, se k = r, temos que
Rj = (r1j , . . . , rkj , 0, . . . , 0) = r1j Rj1 + · · · + rkj Rjk ,
o que implica pelo Teorema 4.5 (b) na página 102 que
Sj = r1j Sj1 + · · · + rkj Sjk .
Mas por hipótese Rj1 = Sj1 , . . . , Rjk = Sjk , então,
Sj = r1j Rj1 + · · · + rkj Rjk = Rj ,
para j = jk + 1, . . . , jk+1 − 1, se k < r ou para j = jr + 1, . . . , n, se k = r.
Logo, se k < r, o pivot da (k + 1)-ésima linha de S ocorre numa coluna maior ou igual a jk + 1. Trocando-se R
por S e usando o argumento anterior chegamos a conclusão que Rjk +1 = Sjk +1 e assim R1 = S1 , . . . , Rjr = Sjr . E
se k = r, então R1 = S1 , . . . , Rn = Sn . Portanto R = S.
4.3
Espaço Linha e Espaço Coluna
Definição 4.7 Seja A uma matriz m × n.
(a) O subespaço de Rn gerado pelas linhas de A é chamado espaço linha de A, ou seja, o conjunto de todas as
combinações lineares das linhas de A.
(b) O subespaço de Rm gerado pelas colunas de A é chamado espaço coluna de A, ou seja, o conjunto de todas
as combinações lineares das colunas de A.
Os espaços linha e coluna de uma matriz são diferentes, em geral, mesmo se a matriz é quadrada, como mostra
o próximo exemplo.
Exemplo 4.31 Considere a matriz
A=
"
1
0
1
0
#
.
O espaço linha de A é o subespaço gerado pelo vector (1, 1), enquanto o espaço coluna de A é o subespaço gerado
pelo vector (1, 0).
Apesar dos espaços linha e coluna de uma matriz serem diferentes, em geral, eles possuem sempre a mesma
dimensão.
Teorema 4.12 Seja A uma matriz m × n. O espaço linha e o espaço coluna de A possuem a mesma dimensão.
Demonstração:
Seja R uma matriz escalonada reduzida equivalente a matriz A.
(a) Pelo Teorema 4.5 (c) na página 102 os espaços linha de A e de R são iguais.
(b) Pelo Teorema 4.5 (a) na página 102 as colunas j1 , . . . , jk da matriz R são L.I. se, somente se, as colunas j1 , . . . , jk
da matriz A também o são.
Pelo item (a) a dimensão do espaço linha de A é igual a dimensão do espaço linha de R e pelo item (b) a dimensão
do espaço coluna de A é igual a dimensão do espaço coluna de R. Portanto, basta provarmos o teorema para a matriz
escalonada reduzida R. Agora, a dimensão do espaço linha de R é igual ao número de linhas não nulas, pois estas
são linearmente independentes (verifique!). A dimensão do espaço coluna de R é igual ao número de pivots, pois as
outras colunas são combinação linear das colunas dos pivots e podem, portanto, ser descartadas para gerar o espaço
coluna de R. Portanto, a dimensão dos dois espaços são iguais.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
109
Capítulo 4. Espaços e Subespaços Rn
4.3.1
Característica e Nulidade
Definição 4.8 Seja A uma matriz m × n.
(a) A característica de A é a dimensão do espaço linha ou do espaço coluna de A, ou seja, é o número máximo
de linhas e colunas L.I. da matriz A.
(b) A nulidade de A é a dimensão do espaço solução de AX = 0.
1
Exemplo 4.32 Considere a matriz A = 2
1
−1
−3
1
2
4
2
1
0 .
5
1 2 0 3
A forma escalonada reduzida da matriz A é a matriz R = 0 0 1 2 . As linhas não nulas de R,
0 0 0 0
→
−
−
v 1 = (1, 2, 0, 3) e →
v 2 = (0, 0, 1, 2), formam uma base para o espaço linha de A. Portanto, a característica de A é
igual a 2.
−
−
−
−
−
−
−
−
Quanto ao espaço coluna, sejam →
w 1, →
w 2, →
w3 e →
w 4 as colunas de A. Sejam →
u 1, →
u 2, →
u3 e →
u 4 as colunas de R.
As colunas sem pivots podem ser descartadas na geração do espaço coluna de R, pois elas são combinação linear das
colunas dos pivots. As colunas correspondentes de A podem, também, ser descartadas na geração do espaço coluna
−
−
−
−
de A, pois os mesmos escalares que fazem a combinação linear nula de →
w 1, →
w 2, →
w3 e →
w 4 , fazem a combinação
−
−
−
−
−
−
linear nula de →
u 1, →
u 2, →
u3 e →
u 4 . Assim, →
w 1 = (1, 2, 1) e →
w 3 = (−1, −3, 1) formam uma base para o espaço coluna
de A.
Vamos apresentar a seguir uma outra forma de calcular a característica de uma matriz. Uma submatriz de uma
matriz A é a própria matriz A ou qualquer matriz obtida de A retirando-se linha(s) e/ou coluna(s).
Teorema 4.13 Seja A uma matriz m × n.
(a) A característica de A é igual a p = min{m, n} se, e somente se, o determinante de uma submatriz p × p é
diferente de zero.
(b) A característica de A é igual ao maior inteiro positivo r tal que alguma submatriz r ×r de A possui determinante
não nulo.
Demonstração:
(a) Podemos supor que m ≤ n, já que a característica de A é igual à característica de AT . Neste caso, p = m
e a característica de A é m se, e somente se, existem m colunas linearmente independentes. Mas existem m
colunas linearmente independentes se, e somente se, existe uma submatriz m × m cujas colunas são linearmente
independentes, ou seja, com o seu determinante diferente de zero.
(b) Se as colunas de A são L.I., então Car(A) = min{m, n} e o resultado decorre do item anterior. Caso contrário,
existe uma coluna de A que é combinação linear das outras e a característica de A é igual à característica da
submatriz obtida de A retirando-se esta coluna. Este processo pode ser continuado até se obter uma submatriz
cujas colunas são linearmente independentes e cuja característica é igual ao de A. A característica desta submatriz
é igual ao mínimo entre o seu número de linhas e o seu número de colunas e é também igual à característica de
A. Aplicando-se o item anterior a esta submatriz obtemos o resultado.
"
#
"
#
a
a 3
Exemplo 4.33 Considere a seguinte matriz A =
. Se det
= a2 − 9 = (a − 3)(a + 3) = 0,
−a
3 a
"
#
"
#
a
a
3
a
det
= −a2 − 3a = −a(a + 3) = 0 e det
= a2 + 3a = a(a + 3) = 0, então a característica de
3 −a
a −a
A é igual a 1. Assim, Car(A) = 1 se, e somente se, a = −3. Caso contrário, a característica de A é igual a 2.
Introdução à Álgebra Linear
a
3
3
a
Opto, Qui Ind, Mat
2007/2008
110
Capítulo 4. Espaços e Subespaços Rn
4.3.2
Aplicação a Sistemas Lineares
Os conceitos de espaço linha e espaço coluna são úteis no estudo de
equivalente à equação
a1n
a11
a12
a21
a22
a2n
x1
.
.. + x2 .. + · · · + xn
..
.
.
am1
am2
amn
sistemas lineares. O sistema AX = B é
b1
b2
= .
.
.
bm
.
Assim, o sistema AX = B tem solução se, e somente se, B é uma combinação linear das colunas de A, ou seja,
se, e somente se, B pertence ao espaço coluna de A.
Teorema 4.14 Sejam A uma matriz m × n e B uma matriz m × 1. O sistema linear AX = B tem solução se, e
somente se, B pertence ao espaço coluna de A.
O espaço solução do sistema AX = 0 é chamado de núcleo de A e é denotado por N (A).
Teorema 4.15 Seja A uma matriz m × n. O sistema linear AX = B, para todo B ∈ Rm ,
(a) tem solução se, e somente se, as colunas de A geram o Rm (Car(A) = m),
(b) tem no máximo uma solução se, e somente se, as colunas de A são linearmente independentes (N (A) = {0}).
Demonstração:
(a) Pelo Teorema 4.14, o sistema tem solução para todo B ∈ Rm se, e somente se, o espaço coluna de A é igual ao
Rm , daí decorre o resultado.
(b) Se o sistema AX = B tem no máximo uma solução para todo B ∈ Rm , então o sistema homogéneo AX = 0
tem somente a solução trivial, daí segue que as colunas de A são linearmente independentes e N (A) = {0}. Se
por outro lado, N (A) = {0}, ou seja, a única solução do sistema homogéneo AX = 0 é a solução trivial, e X1 e
X2 são soluções de AX = B, então X1 − X2 é solução de AX = 0 (verifique!). Assim, X1 − X2 = 0, ou seja,
X1 = X2 .
Segue do item (a) do teorema anterior que um sistema linear AX = B com mais incógnitas do que equações não
pode ter solução para todo B. Segue também do teorema anterior, que o sistema AX = B tem exactamente uma
solução para todo B ∈ Rm se, e somente se, as colunas de A formam uma base do Rm . E isto ocorre se, e somente
se, m = n e uma das duas condições ocorre: ou N (A) = {0} ou Car(A) = n = m.
Teorema 4.16 Sejam A uma matriz m × n e B uma matriz m × 1. O sistema linear AX = B,
(a) tem solução se, e somente se, Car([A|B]) = Car(A),
(b) tem solução única se, e somente se, Car([A|B]) = Car(A) = n.
Demonstração:
(a) Suponha, em primeiro lugar, que o sistema AX = B tem solução. Então, B é combinação linear das colunas de
A. Portanto, o espaço coluna de [A|B] é igual ao espaço coluna de A, ou seja, Car([A|B]) = Car(A).
Por outro lado, se Car([A|B]) = Car(A), então B pertence ao espaço coluna de A, ou seja, B é combinação
linear das colunas de A. Portanto, o sistema AX = B tem solução.
(b) Do item anterior podemos assumir que AX = B tem solução. Seja X0 uma solução particular de AX = B.
Então, Y = X + X0 é solução de AX = B se, e somente se, X é solução do sistema homogéneo AX = 0. Assim,
AX = B tem solução única se, e somente se, o sistema homogéneo AX = 0, tem somente a solução trivial. E
isto acontece se, e somente se, as colunas de A são linearmente independentes, ou seja, as colunas de A formam
uma base para o seu espaço coluna ou equivalentemente Car(A) = n.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
Capítulo 4. Espaços e Subespaços Rn
111
(
ax + 3y =
a
Exemplo 4.34 Considere o sistema
3x + ay = −a
"
#
"
#
a 3
a
Para este sistema, A =
eB=
.
3 a
−a
O sistema tem solução única se, e somente se, Car(A) = 2 (neste caso, Car(A) = 2 implica que Car([A|B]) =
2). Agora, Car(A) = 2 se, e somente se, det(A) 6= 0. Como det(A) = a2 − 9, então o sistema tem solução única
se, e somente se, a 6= ±3.
O sistema tem infinitas soluções se, e somente se, Car([A|B]) = 1 (neste caso, Car([A|B]) = 1 implica que
Car(A)
= #1). Agora,
"
" Car([A|B])
# = 1 se, e somente se, det(A) = 0, det(A1 ) = 0 e det(A2 ) = 0, em que A1 =
a 3
a
a
e A2 =
. Como det(A1 ) = a2 + 3a = a(a + 3) e det(A2 ) = −a2 − 3a = −a(a + 3), então o
−a a
3 −a
sistema tem infinitas soluções se, e somente se, a=-3.
O sistema não tem solução se, e somente se, Car(A) = 1 e Car([A|B]) = 2. Agora, Car(A) = 1 se, e somente
se, det(A) = 0. E Car([A|B]) = 2 se, e somente se, det(A) 6= 0, ou det(A1 ) 6= 0 ou det(A2 ) 6= 0. Assim o sistema
não tem solução se, e somente se, a = 3.
Teorema 4.17 Sejam A uma matriz m × n e B uma matriz m × 1. Seja X0 uma solução (particular) do sistema
linear AX = B. Se X1 , . . . , Xk formam uma base para o núcleo de A, então toda solução de AX = B pode ser
escrita na forma
X = X0 + α1 X1 + · · · + αk Xk ,
(4.3.19)
em que α1 , . . . , αk são escalares. Reciprocamente, para todos os escalares α1 , . . . , αk a expressão (4.3.19) é solução
do sistema AX = B.
Demonstração:
Seja X uma solução qualquer do sistema AX = B. Então, X − X0 é solução do sistema homogéneo, pois
A(X − X0 ) = AX − AX0 = B − B = 0. Como X1 , . . . , Xk formam uma base para o núcleo de A, existem escalares
α1 , . . . , αk tais que
X − X0 = α1 X1 + · · · + αk Xk .
Daí segue a equação (4.3.19). Por outro lado, se α1 , . . . , αk são escalares, então
A(X0 + α1 X1 + · · · + αk Xk ) = AX0 + α1 AX1 + · · · + αk AXk = B + 0 + · · · + 0 = B,
ou seja, a expressão (4.3.19) é solução de AX = B.
4.3.3
A Imagem de uma Matriz
Seja A uma matriz m × n. Pelo Teorema 4.14 na página 110, o espaço coluna de A é igual ao conjunto dos vectores
B ∈ Rm tais que o sistema linear AX = B tem solução, ou seja, é igual ao conjunto
J (A) = {B ∈ Rm : AX = B para algum X ∈ Rn },
chamado de imagem de A, porque é a imagem da função f : Rn −→ Rm que associa a cada vector X ∈ Rn o
vector AX ∈ Rm , f (X) = AX. De forma análoga, se vê que o espaço linha de A é igual à imagem de AT . A função
f : Rn −→ Rm definida por f (X) = AX, para uma matriz m × n é chamada transformação linear associada à
matriz A.
Teorema 4.18 Seja A uma matriz m × n. O espaço coluna de A é igual a J (A) e o espaço linha é igual a J (AT ).
A dimensão do núcleo de A (nulidade), e a dimensão da imagem de A (característica) não são independentes um
do outro, como mostra o próximo resultado.
Teorema 4.19 (da Dimensão do Núcleo e da Imagem) Seja A uma matriz m × n. A soma da dimensão do
núcleo de A (nulidade) com a dimensão da imagem de A (característica) é igual ao número de colunas da matriz
A, ou seja,
dim(N (A)) + dim(J (A)) = n ou nulidade(A) + Car(A) = n.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
112
Capítulo 4. Espaços e Subespaços Rn
Demonstração:
−
−
Seja V = Rn . Sejam →
v 1, . . . , →
v p vectores do V, que formam uma base para o núcleo de A. Vamos estendê-la a
→
−
−
−
−
uma base de V. Sejam v p+1 , . . . , →
v n vectores do V tais que →
v 1, . . . , →
v n formam uma base de V. Vamos mostrar
→
−
→
−
que A v p+1 , . . . , A v n formam uma base da imagem de A. Para isso, precisamos mostrar que eles geram a imagem
de A e que eles são L.I.
−
−
−
Vamos mostrar, em primeiro lugar, que A→
v p+1 , . . . , A→
v n geram a imagem de A. Seja →
y ∈ J (A). Então
−
−
−
−
−
−
existe →
x ∈ V tal que A→
x = →
y . Como →
v 1, . . . , →
v n é base de V, existem escalares α1 , . . . , αn tais que →
x =
→
−
→
−
→
−
→
−
→
−
α1 v 1 + · · · + αn v n . Multiplicando à esquerda por A e usando que A v 1 = . . . = A v p = 0 , obtemos que
−
−
−
−
−
αp + 1A→
v p+1 + · · · + αn A→
vn=→
y , ou seja, A→
v p+1 , . . . , A→
v n geram a imagem de A.
→
−
→
−
−
−
Vamos mostrar, agora, que A v p+1 , . . . , A v n são linearmente independentes. Se xp+1 A→
v p+1 + · · · + xn A→
vn=
→
−
→
−
→
−
→
−
→
−
→
−
0 , então A(xp+1 v p+1 + · · · + xn v n ) = 0 . Mas, isto implica que xp+1 v p+1 + · · · + xn v n pertence ao núcleo de
−
−
−
−
A, ou seja, existem escalares x1 , . . . , xp tais que xp+1 →
v p+1 + · · · + xn →
v n = x1 →
v 1 + · · · + xp →
v p . Daí segue que
→
−
−
−
−
−
−
−
x1 →
v 1 + · · · + xp →
v p − xp+1 →
v p+1 − · · · − xn →
v n = 0 . Como →
v 1, . . . , →
v n é base, então x1 = . . . = xp = xp+1 =
−
−
. . . = xn = 0, ou seja, A→
v p+1 , . . . , A→
v n são L.I.
Portanto, a dimensão da imagem de A é igual a diferença entre n e a dimensão do núcleo de A. Daí segue o
resultado.
Segue do Teorema da Dimensão do Núcleo e da Imagem que o número de variáveis livres na solução geral de um
sistema linear AX = B é igual a dimensão do núcleo de A.
Exercícios Numéricos
4.3.1 Para cada
uma
1
(a)
2
−1
das
4
1
3
seguintes
espaço coluna.
matrizes, encontre uma base para o espaço linha e para o
5 2
1 −4 −5
4
(b)
3 0
4
4 −5
−1
2 2
0
0
2
0
4.3.2 Determine a dimensão do subespaço de R3 gerado pelos vectores:
(a) (1, −2, 2), (2, −2, 4), (−3, 3, 6)
(b) (1, −3, 4), (6, 2, −1), (2, −2, 3), (−4, −8, 9)
1 2 2 3 1 4
4.3.3 Seja A = 2 4 5 5 4 9 .
3 6 7 8 5 9
(a) Determine a forma escalonada reduzida U da matriz A. Quais as colunas de U que correspondem às
variáveis livres. Escreva cada uma destas colunas como uma combinação linear das colunas correspondentes
aos pivots.
(b) Quais as colunas de A que correspondem aos pivots de U ? Estas colunas formam uma base para o espaço
coluna de A. Escreva cada uma das colunas restantes como combinação linear das colunas da base.
4.3.4 Determine a característica e a nulidade das seguintes matrizes:
(a)
(c)
"
1
2
1
2
3
2
4
0
−1
−1
0
−1
#
1
3
4
(b)
(d)
"
1
2
1
3
−1
2
4
3
6
−1
1
2
#
2
0
4
4.3.5 Discuta como a característica de A varia com t.
t
1 1 t
(b)
A= 3
(a)
A= 1 t 1
−1
t 1 1
0
0
0
3
6
−3
−1
−2
−t
4.3.6 Encontre o maior valor possível para Car(A) e o menor valor possível para nulidade(A).
(a)
A é 2×3
(b)
A é 3×2
(c)
A é 3×3
(d)
A é m × n.
4.3.7 Seja A uma matriz não nula. Encontre os valores de Car(A) e de Car([A|B]) para os quais o sistema linear
AX = B tem solução única, não tem solução e tem infinitas soluções.
(a)
A é 2×3
(b)
Introdução à Álgebra Linear
A é 3×2
(c)
A é 3×3
(d)
Opto, Qui Ind, Mat
A é m×n
2007/2008
113
Capítulo 4. Espaços e Subespaços Rn
Exercícios Teóricos
4.3.8 Seja A uma matriz n × n.
(a) A matriz A é invertível se, e somente se, N (A) = {0}.
(b) Mostre que Car(A) = n se, e somente se, as colunas de A são linearmente independentes.
(c) Mostre que o sistema homogéneo AX = 0 tem solução não trivial se, e somente se, o Car(A) < n.
(d) Mostre que a característica de A é n se, e somente se, det(A) 6= 0.
4.3.9 Sejam X = [x1 · · · xm ] e Y = [y1 · · · yn ] matrizes 1 × m e 1 × n, respectivamente. Seja A = X T Y . Mostre
que {X} é uma base para o espaço coluna de A e que {Y } é uma base para o espaço linha. Qual é a dimensão
do N (A)?
4.3.10 Mostre que se A é uma matriz, m × n, de característica igual a 1, então existem matrizes X = [x1 · · · xm ] e
Y = [y1 · · · yn ], 1 × m e 1 × n, respectivamente, tais que A = X T Y . (Sugestão: Tome X tal que {X} é uma
base para o espaço coluna de A.)
4.3.11 Sejam A e B matrizes m × p e p × n, respectivamente. Mostre que AB pode ser escrita como uma soma de p
matrizes de característica igual a 1.
4.3.12 Sejam A e B matrizes m × p e p × n, respectivamente. Seja C = AB. Mostre que:
(a) O espaço coluna de C está contido no espaço coluna de A.
(b) O espaço linha de C está contido no espaço linha de B.
(c) Car(C) ≤ min(Car(A), Car(B)).
(d) Se as colunas de A e B são linearmente independentes, então as colunas de C também são linearmente
independentes.
(e) Se as linhas de A e B são linearmente independentes, então as linhas de C também são linearmente
independentes.
(f) Se as colunas de B são linearmente dependentes, então as colunas de C também são linearmente dependentes.
(g) Se as linhas de A são linearmente dependentes, então as linhas de C também são linearmente dependentes.
(h) O núcleo de B está contido no núcleo de C.
4.3.13 Seja A uma matriz m × n. Se P e Q são matrizes invertíveis m × m e n × n, respectivamente, então A, P A e
AQ possuem a mesma característica.
4.3.14 Sejam A e B matrizes n × n. Mostre que AB = 0 se, e somente se, o espaço coluna de B está contido no
núcleo de A.
4.3.15 Seja A uma matriz n × n e B uma matriz n × 1. Para cada i, defina a matriz Ai como sendo a matriz que se
obtém de A substituindo-se a i-ésima coluna por B.
(a) Mostre que se para algum i, det(Ai ) 6= 0, então Car([A|B]) = n.
(b) Suponha que o det(A) = 0. Mostre que se para algum i, det(Ai ) 6= 0, então o sistema AX = B não tem
solução.
(c) Mostre que se det(Ai ) = 0 para i = 1, . . . , n e det(A) = 0, então tanto pode ocorrer que o sistema AX = B
tenha infinitas soluções, como pode ocorrer que ele não tenha solução.
Teste do Capítulo
Considere a matriz
0
A= 0
0
0
2
4
0
1 .
2
1. Encontre os valores de λ tais que o sistema homogéneo (A − λI3 )X = 0 tem solução não trivial.
2. Para os valores de λ encontrados no item anterior, encontre uma base para o espaço solução de (A−λI3 )X = 0.
3. Determine o espaço linha, o espaço coluna e a característica de A.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
Capítulo 5
Transformações Lineares
5.1
5.1.1
Definição, Exemplos e Propriedades
Definição e Exemplos
Lembramos que uma função f de um conjunto A em um conjunto B, f : A → B, é uma regra que associa a
cada elemento do conjunto A, um único elemento do conjunto B. O conjunto A é chamado domínio e o conjunto
B é chamado contradomínio. O subconjunto de B formado pelos elementos b ∈ B tais que f (a) = b, para algum
a ∈ A é chamado (conjunto) imagem de f . Para todo elemento a ∈ A, f (a) é chamado a imagem de a por f .
Dizemos também que f leva a em f (a).
Definição 5.1 Uma função T : Rn → Rm é uma transformação linear se
−
−
−
−
−
−
T (α→
x ) = αT (→
x)
e
T (→
x +→
y ) = T (→
x ) + T (→
y)
−
−
para todos →
x ,→
y ∈ Rn e todos os escalares α.
(5.1.1)
Exemplo 5.1 A função O, que leva todo vector de Rn no vector nulo de Rm , ou seja,
→
−
−
→
−
O(→
x)= 0,
para todo
x ∈ Rn ,
é claramente uma transformação linear e é chamada a transformação linear nula. Também a transformação
identidade, I, de Rn em Rn que leva todo vector de Rn nele mesmo, ou seja,
−
−
→
−
I(→
x)=→
x,
para todo
x ∈ Rn ,
é claramente uma transformação linear.
Exemplo 5.2 Sejam Px , Py : R2 → R2 as funções que levam todo vector nas suas projecções em relação aos eixos
x e y, respectivamente, ou seja, Px (x, y) = (x, 0) e Py (x, y) = (0, y), para todo par (x, y) ∈ R2 . Deixamos para o
leitor a verificação de que Px e Py são transformações lineares.
Exemplo 5.3 Sejam Rx , Ry : R2 → R2 as funções que levam todo vector nas suas reflexões em relação aos eixos
x e y, respectivamente, ou seja, Rx (x, y) = (x, −y) e Ry (x, y) = (−x, y), para todo par (x, y) ∈ R2 . Deixamos para
o leitor a verificação de que Rx e Ry são transformações lineares.
Exemplo 5.4 Considere a função, Pr , que faz a projecção ortogonal de todo vector do plano numa recta que passa
pela origem r : (x, y) = t(a, b), ou seja, Pr : R2 → R2 dada por
Pr (x, y) = proj(a,b) (x, y) =
Ou seja,
a2
ab
ab
b2
x+ 2
y, 2
x+ 2
y .
2
2
2
2
+b
a +b
a +b
a +b
Esta transformação é um caso particular daquela que é tratada no Exemplo 5.6.
Pr (x, y) =
(a, b) (x, y)
(a, b).
k(a, b)k2
a2
Exemplo 5.5 Considere a função, Rr , que faz a reflexão de todo vector do plano numa recta que passa pela origem
r : (x, y) = t(a, b), ou seja, Rr (x, y) é tal que 2Pr (x, y) = (x, y) + Rr (x, y). Assim,
2
a − b2
2ab
2ab
b2 − a2
Rr (x, y) = 2Pr (x, y) − (x, y) =
x
+
y,
x
+
y
.
a2 + b2
a2 + b2 a2 + b2
a2 + b2
Esta transformação é um caso particular daquela que é tratada no Exemplo 5.6.
114
115
Capítulo 5. Transformações Lineares
Os quatro últimos exemplos são um caso particular do que é apresentado no próximo exemplo.
Exemplo 5.6 Considere a transformação T : Rn → Rm , dada por
x1
a11 x1 + · · · + a1n xn
x2 a21 x1 + · · · + a2n xn
−
T (→
x) =T
.
.. =
..
.
am1 x1 + · · · + amn xn
xn
que pode ser escrita como
−
T (→
x)=
a11
a21
..
.
am1
a12
a22
..
.
am2
···
···
a1n
a2n
..
.
amn
···
,
x1
x2
..
.
xn
→
−
x ∈ Rn ,
para todo
−
= A→
x,
em que A = (aij )m×n . Segue das propriedades da álgebra matricial, Teorema 1.1 na página 3, que T é uma
transformação linear. Pois,
−
−
−
−
−
−
−
−
T (→
x +→
y ) = A(→
x +→
y ) = A→
x + A→
y = T (→
x ) + T (→
y ),
−
−
−
−
T (α→
x ) = A(α→
x ) = αA→
x = αT (→
x ),
→
−
→
−
para todos x , y ∈ Rn e escalares α.
Em termos de matrizes, as projecções nos eixos x e y podem ser escritas como
"
# "
#"
#
"
# "
#"
#
x
1 0
x
x
0 0
x
Px
=
, Py
=
,
y
0 0
y
y
0 1
y
as reflexões em relação aos eixos x e y, como
#
#"
# "
"
x
1
0
x
,
=
Rx
y
0 −1
y
Ry
"
x
y
#
=
"
−1
0
0
1
a projecção ortogonal e a reflexão em relação a uma recta r : (x, y) = t(a, b), como
"
"
#
#
"
# a2 −b2
a2
ab
x
x
x
2
2
2
2
2 +b2
+b
a +b
Pr
= a ab
, Rr
= a 2ab
b2
y
y
y
2
2
2
2
2
2
a +b
5.1.2
a +b
a +b
#"
x
y
2ab
a2 +b2
2
2
b −a
a2 +b2
#
,
"
x
y
#
.
Propriedades
Segue da Definição 5.1 que toda transformação linear T : Rn → Rm leva o vector nulo de Rn no vector nulo de Rm .
−
Pois, se →
x é um vector qualquer de Rn , então
→
−
→
−
−
−
T ( 0 ) = T (0→
x ) = 0T (→
x)= 0.
Segue também da Definição 5.1 que uma função T : Rn → Rm é uma transformação linear se, e somente se,
−
−
−
−
−
T (α→
x + β→
y ) = αT (X) + βT (→
y ), para todos os vectores →
x,→
y ∈ Rn e todos os escalares α e β. Pois, se T é linear,
então
−
−
−
−
−
−
T (α→
x + β→
y ) = T (α→
x ) + T (β →
y ) = αT (→
x ) + βT (→
y ).
−
−
−
−
−
−
Por outro lado, se T é uma função tal que T (α→
x + β→
y ) = αT (→
x ) + βT (→
y ), para todos os vectores →
x,→
y ∈ Rn
e todos os escalares α e β, então fazendo α = 1, β = 1 e depois β = 0 segue que T é uma transformação linear.
−
Se T : Rn → Rm é uma transformação linear e B é uma base de Rn , então todo vector →
v ∈ Rn pode ser escrito
→
−
→
−
como combinação linear de vectores de B, ou seja, existem vectores v 1 , · · · , v n ∈ B e escalares α1 , · · · , αn tais que
→
−
−
−
v = α1 →
v 1 + · · · + αn →
vn=
Então
−
T (→
v)=T
n
X
−
αi →
vi
i=1
!
=
n
X
n
X
−
αi →
v i.
i=1
−
T (αi →
v i) =
i=1
n
X
−
αi T (→
v i ).
i=1
−
−
Por outro lado, se U : Rn → Rm é outra transformação linear tal que U (→
v i ) = T (→
v i ) para i = 1, · · · , n, então
aplicando-se o raciocínio acima, temos que
−
−
−
U (→
v ) = T (→
v ),
para todo →
v ∈ Rn .
Ou seja, U = T . Isto prova o seguinte teorema.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
116
Capítulo 5. Transformações Lineares
Teorema 5.1 Uma transformação linear T : Rn → Rm é totalmente caracterizada pelos seus valores em uma base
−
−
de Rn . Ou seja, se B = {→
v 1, · · · , →
v n } é uma base de Rn e uma função T está definida para valores em B,
−
−
T (→
v i) = →
w i,
para
i = 1, · · · , n.
Então, existe um única transformação linear definida em todo espaço Rn , T : Rn → Rm , tal que
−
−
T (→
v i) = →
w i,
para
i = 1, · · · , n.
Exemplo 5.7 Seja Rθ : R2 → R2 a transformação linear definida na base canónica por (Figura 6.1)
−
−
−
Rθ (→
e 1 ) = cos θ →
e 1 + sin θ →
e2
→
−
→
−
→
R ( e ) = − sin θ e + cos θ −
e
θ
2
1
2
=
(cos θ, sin θ)
=
(− sin θ, cos θ).
−
−
Assim, como (x, y) = x(1, 0) + y(0, 1) = x→
e 1 + y→
e 2 , então
"
#
"
#
"
#
x
cos θ
− sin θ
−
−
Rθ
= xRθ (→
e 1 ) + yRθ (→
e 2) = x
+y
y
sin θ
cos θ
"
#"
#
cos θ − sin θ
x
=
sin θ
cos θ
y
−
Se escrevemos →
x = (x, y) = (r cos α, r sin α), então
−
Rθ (→
x)
=
Rθ (r cos α, r sin α) = rRθ (cos α, sin α)
=
r(cos α cos θ − sin α sin θ, cos α sin θ + sin α cos θ)
=
r(cos(α + θ), sin(α + θ)) = (r cos(α + θ), r sin(α + θ)).
−
Assim, segue da linearidade, que Rθ faz uma rotação de um ângulo θ em todo vector →
x = (x, y) ∈ R2 .
−
Rθ (→
e 2)
→
−
e2
−
Rθ (→
e 1)
θ
θ
→
−
e1
Figura 6.1:
−
−
Transformação rotação sobre os vectores →
e1 e →
e2
Seja T : Rn → Rm uma transformação linear tal que
1
a11
0
a12
0 a21
1 a22
T
=
,
T
=
,
·
·
·
,
T
.. ..
.. ..
. .
. .
am1
0
am2
0
−
−
Sejam →
x = (x1 , · · · , xn ) um vector qualquer do Rn e →
e 1 = (1, 0, · · ·
→
−
→
−
→
−
(0, · · · , 0, 1). Como x = x e + · · · + x e , então
1
1
n
a1n
a2n
=
..
.
.
amn
→
−
−
, 0), e 2 = (0, 1, 0, · · · , 0), · · · , →
en =
0
..
.
0
1
n
a1n
a11
a21
a2n
−
−
−
T (→
x ) = x1 T (→
e 1 ) + · · · + xn T (→
e n ) = x1
..
.. + · · · + xn
.
.
am1
amn
a11
a12
···
a1n
x1
a21
a22
···
a2n x2
→
−
=
..
..
..
.. = A x ,
.
.
.
.
am1 am2 · · · amn
xn
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
117
Capítulo 5. Transformações Lineares
−
−
−
−
−
em que as colunas de A são T (→
e 1 ), · · · , T (→
e n ), ou seja, A = T (→
e 1 ) · · · T (→
e n ) , com T (→
e i ), para i = 1, · · · , n
escritos como matrizes colunas. Isto prova o seguinte resultado.
Teorema 5.2 Seja T : Rn → Rm uma transformação linear. Então, T é dada por
−
−
−
T (→
x ) = A→
x , para todo →
x ∈ Rn ,
−
−
−
em que A = (aij )m×n = T (→
e 1 ) · · · T (→
e n ) , com T (→
e i ), para i = 1, · · · , n, escritos como matrizes colunas e
→
−
→
−
→
−
e 1 = (1, 0, · · · , 0), e 2 = (0, 1, 0, · · · , 0), · · · , e n = (0, · · · , 0, 1). A matriz A é chamada matriz da transformação
T (em relação às bases canónicas).
Exemplo 5.8 A matriz de uma transformação linear pode ser obtida rapidamente aplicando-se a transformação
nos vectores da base canónica. Por exemplo, as matrizes das projecções nos eixos x e y podem ser obtidas
"
#
"
#
1 0
0 0
−
−
−
−
Px (→
e 1 ) Px (→
e 2) =
, Py (→
e 1 ) Py (→
e 2) =
;
0 0
0 1
as matrizes das reflexões em relação aos eixos x e y,
"
#
"
1
0
−1
−
−
−
−
Rx (→
e 1 ) Rx (→
e 2) =
, Ry (→
e 1 ) Ry (→
e 2) =
0 −1
0
0
1
#
;
as matrizes da projecção ortogonal e da reflexão em relação a uma recta r : (x, y) = t(a, b), como
2 2
a −b
ab
2ab
a2
2 +b2
2 +b2
2 +b2
2 +b2
→
−
→
−
→
−
→
−
a
a
a
a
;
, Rr ( e 1 ) Rr ( e 2 ) =
Pr ( e 1 ) Pr ( e 2 ) =
b2
ab
b2 −a2
2ab
a2 +b2
a2 +b2
a2 +b2
a2 +b2
e a matriz da rotação de um ângulo θ,
−
−
Rθ (→
e 1 ) Rθ (→
e 2) =
"
cos θ
sin θ
− sin θ
cos θ
#
.
Exercícios Numéricos
5.1.1 Seja T : R2 → R2 uma transformação linear para a qual sabemos que T (1, 1) = (2, −3) e T (0, 1) = (1, 2).
(a) Determine T (3, −2).
(b) Determine T(a,b).
5.1.2 Determine a transformação T : R2 → R3 tal que T (1, 1) = (3, 2, 1) e T (0, −2) = (0, 1, 0). Encontre T (1, 0) e
T (0, 1).
5.1.3 Determine expressões para as transformações lineares Pxy , Pyz , Pxz : R3 → R3 , que são projecções nos planos
xy, yz e xz, respectivamente.
5.1.4 Considere o plano π : x + 2y + 3z = 0. Encontre expressões para as seguintes transformações lineares:
(a) A projecção ortogonal no plano π, Pπ : R3 → R3 .
(b) A reflexão em relação ao plano π, Rπ : R3 → R3 .
5.1.5 Determine expressões para as transformações lineares Rπ/3,x , Rπ/3,y e Rπ/3,z que são rotações de π/3 em
relação aos eixos x, y e z, respectivamente.
5.1.6 Considere a recta r : (x, y, z) = t(1, 1, 1).
(a) Seja Pr : R3 → R3 a projecção ortogonal na recta r. Encontre uma expressão para Pr (x, y, z).
(b) Seja Rr : R3 → R3 a reflexão em relação à recta r. Encontre uma expressão para Rr (x, y, z).
5.1.7 Existe uma única reflexão S do plano que transforma o ponto (5, 0) no ponto (3, 4). Determine a equação para
o eixo da reflexão S. Verifique que ele passa pela origem. Calcule a matriz (em relação à base canónica de R2 )
da reflexão S.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
118
Capítulo 5. Transformações Lineares
Exercícios Teóricos
5.1.8 Considere o plano π : ax + by + cz = 0. Encontre expressões para as seguintes transformações lineares:
(a) A projecção ortogonal no plano π, Pπ : R3 → R3 .
(b) A reflexão em relação ao plano π, Rπ : R3 → R3 .
5.1.9 Determine expressões para as transformações lineares Rθ,x , Rθ,y , Rθ,z : R3 → R3 , que são rotações de θ em
relação aos eixos x, y e z, respectivamente.
5.1.10 Considere a recta r : (x, y, z) = t(a, b, c). Encontre expressões para as seguintes transformações lineares:
(a) A projecção ortogonal na recta r, Pr : R3 → R3 .
(b) A reflexão em relação à recta r, Rr : R3 → R3 .
−
5.1.11 Seja →
y = (a, b, c) ∈ R3 . Determine a matriz do operador linear T : R3 → R3 , definido por
"
#
"
#
"
#!
y z
x z
x y
→
−
→
−
→
−
T ( x ) = T (x, y, z) = x × y = det
, − det
, det
,
b c
a c
a b
em relação à base canónica.
5.1.12 Seja c uma constante diferente de zero. Uma transformação linear T : R2 → R2 dada por T (x, y) = (cx, y),
para todo (x, y) ∈ R2 é chamada expansão ao longo do eixo x se c > 1 e contracção ao longo do eixo
x se 0 < c < 1. Uma transformação linear T : R2 → R2 dada por T (x, y) = (x, cy), para todo (x, y) ∈ R2 é
chamada expansão ao longo do eixo y se c > 1 e contracção ao longo do eixo y se 0 < c < 1.
Uma transformação linear T : R2 → R2 dada por T (x, y) = (x + cy, y), para todo (x, y) ∈ R2 é chamada
cisalhamento ao longo do eixo x. Uma transformação linear T : R2 → R2 dada por T (x, y) = (x, y + cx),
é chamada cisalhamento ao longo do eixo y.
(a) Mostre que a matriz elementar que corresponde a trocar duas linhas é a matriz de uma reflexão em relação
à recta y = x.
(b) Mostre que a matriz elementar que corresponde a multiplicar uma linha por um escalar não nulo é a matriz
de uma expansão, ou a matriz de uma contracção, ou a matriz de uma reflexão em relação a um dos eixos
coordenados, ou um produto de uma matriz de uma reflexão em relação a um dos eixos coordenados por
uma matriz de uma expansão ou contracção.
(c) Mostre que a matriz elementar que corresponde a somar a uma linha um múltiplo escalar de outra é a
matriz de um cisalhamento ao longo de um dos eixos coordenados.
5.2
A Imagem e o Núcleo
Definição 5.2 Seja T : Rn → Rm uma transformação linear.
(a) O núcleo de T é definido pelo conjunto
→
−
−
−
N (T ) = {→
x ∈ Rn : T (→
x ) = 0 },
(b) A imagem de T é definida pelo conjunto
−
−
−
J (T ) = {→
y ∈ Rm : →
y = T (→
x ), para algum
→
−
x ∈ Rn },
(c) A dimensão do núcleo de T é chamada de nulidade de T e a dimensão da imagem de T é chamada característica de T .
Exemplo 5.9 Sejam O : Rn → Rm a transformação linear nula e I : Rn → Rn a transformação identidade.
→
−
→
−
Então N (O) = Rn , J (O) = { 0 }, N (I) = { 0 } e J (I) = Rn .
Teorema 5.3 Sejam Rn e Rm espaços vectoriais. Seja T : Rn → Rm uma transformação linear. O núcleo, N (T ),
e a imagem, J (T ) são subespaços de Rn e de Rm , respectivamente.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
119
Capítulo 5. Transformações Lineares
Demonstração:
Para mostrar que um conjunto é um subespaço precisamos mostrar as propriedades (a) e (b) da página 99, ou
seja, que com relação às operações de soma de vectores e multiplicação por escalar podemos “viver” nele sem termos
que sair. Vamos mostrar em primeiro lugar que o núcleo de T é um subespaço.
→
−
→
−
→
−
→
−
−
−
−
−
−
−
−
−
(a) Se →
x 1, →
x 2 ∈ N (T ), então T (→
x 1 ) = T (→
x 2 ) = 0 . Logo, T (→
x1+→
x 2 ) = T (→
x 1 ) + T (→
x 2 ) = 0 + 0 = 0 , ou
→
−
→
−
seja, x + x ∈ N (T )
1
2
→
−
−
−
−
−
(b) Se →
x ∈ N (T ) e α é um escalar, então T (α→
x ) = αT (→
x ) = α 0 . Logo, α→
x ∈ N (T ).
Vamos mostrar, agora, que a imagem de T é um subespaço.
−
−
−
−
−
−
−
−
−
−
−
(a) Se →
y 1, →
y 2 ∈ J (T ), então existem →
x 1, →
x 2 ∈ Rn tais que T (→
x 1) = →
y 1 e T (→
x 2) = →
y 2 . Seja →
x =→
x1+→
x 2.
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
Então, T ( x ) = T ( x + x ) = T ( x ) + T ( x ) = y + y . Logo, y + y ∈ J (T ).
1
2
1
2
1
2
1
2
−
−
−
−
(b) Se →
y ∈ J (T ) e α é um escalar, então existe →
x ∈ Rn tal que T (→
x) = →
y.
−
−
−
−
T (α→
x ) = αT (→
x ) = α→
y . Logo, α→
y ∈ J (T ).
Como T é linear, então
Exemplo 5.10 A imagem de uma transformação linear de Rn em R não nula, f : Rn → R, é o conjunto R, pois
→
−
{ 0 } e R são os únicos subespaços do espaço vectorial R.
−
−
Teorema 5.4 Seja T : Rn → Rm uma transformação linear. Se {→
v 1, · · · , →
v n } é uma base do Rn , então a imagem
→
−
→
−
de T é gerada por T ( v 1 ), · · · , T ( v n ).
Demonstração:
−
−
−
−
−
−
Seja →
w ∈ J (T ). Então, existe →
v ∈ Rn tal que T (→
v)=→
w . Como {→
v 1, · · · , →
v n } é uma base do Rn , existem
−
−
−
escalares α1 , · · · , αn tais que →
v = α1 →
v 1 + · · · + αn →
v n . Assim,
!
n
n
X
X
→
−
→
−
→
−
−
w = T( v ) = T
α v
=
α T (→
v ).
i
i=1
i
i
i
i=1
−
−
Ou seja, T (→
v 1 ), · · · , T (→
v n ) geram J (T ).
Exemplo 5.11 Vamos considerar as projecções nos eixos x e y (Figuras 6.2 e 6.3)
"
# "
#"
#
"
# "
#"
#
x
1 0
x
x
0 0
x
Px
=
,
Py
=
.
y
0 0
y
y
0 1
y
Geometricamente vemos que o núcleo de Px é o eixo y, o núcleo de Py é o eixo x, que são os pontos que são
levados pelas transformações para a origem. Vemos também que a imagem de Px é o eixo x, pois todos os pontos
são levados por Px no eixo x. Analogamente, a imagem de Py é o eixo y.
y
y
→
−
v
−
Py (→
v)
→
−
v
−
Px (→
v)
Figura 6.2:
x
Projecção no eixo x
x
Figura 6.3:
Projecção no eixo y
Exemplo 5.12 Vamos considerar as reflexões em relação aos eixos x e y (Figuras 6.4 e 6.5)
"
# "
#"
#
"
# "
#"
#
x
1
0
x
x
−1 0
x
Rx
=
, Ry
=
.
y
0 −1
y
y
0 1
y
Geometricamente vemos que o núcleo de Rx e o núcleo de Ry são iguais à origem, pois é o único ponto que é
levado para a origem pelas transformações. Vemos também que as imagens de Rx e de Ry são iguais a R2 , pois
todo ponto (x, y) é imagem do ponto (x, y) reflectido pelas respectivas transformações.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
120
Capítulo 5. Transformações Lineares
y
y
−
Ry (→
v)
→
−
v
→
−
v
x
x
−
Rx (→
v)
Figura 6.2:
Reflexão em relação
ao eixo x
Figura 6.3:
Reflexão em relação
ao eixo y
Exemplo 5.13 Consideremos a projecção ortogonal e a reflexão em relação a uma recta r : (x, y) = t(a, b) (Figuras
6.6 e 6.7)
"
"
"
#
#
"
# a2 −b2
#
ab
2ab
a2
x
x
x
x
2
2
2
2
2
2
2
2
+b
a +b
a +b
a +b
,
R
=
Pr
= a ab
.
r
b2
b2 −a2
2ab
y
y
y
y
2
2
2
2
2
2
2
2
a +b
a +b
a +b
a +b
Geometricamente vemos que o núcleo de Pr é a recta s : (x, y) = t(−b, a), perpendicular à recta r que passa
pela origem, pois os pontos sobre a recta s são exactamente os pontos que são levados por Pr para a origem.
Vemos também que a imagem de Pr é a própria recta r, pois todos os pontos do R2 são levados para a recta r.
Geometricamente vemos que o núcleo de Rr é a origem, pois é o único ponto do R2 que é levado para a origem.
Vemos também que a imagem de Rr é o R2 , pois todo ponto (x, y) é a imagem do ponto (x, y) reflectido por r.
y
−
−
−
2Pr (→
v)=→
v + Rr (→
v)
y
→
−
v
→
−
v
−
Pr (→
v)
x
r
Figura 6.2:
r
Projecção na recta r
Figura 6.3:
−
Rr (→
v)
x
Reflexão em relação
à recta r
Exemplo 5.14 Geometricamente vemos que a rotação de um ângulo θ (Figura 6.8 na página 373)
"
# "
#"
#
x
cos θ − sin θ
x
Rθ
=
y
sin θ
cos θ
y
tem núcleo igual à origem, pois é o único ponto que é levado para a origem por Rθ . Vemos também que a imagem
de Rθ é igual ao R2 , pois todo ponto (x, y) é a imagem do ponto (x, y) girado de −θ.
Seja T : Rn → Rm uma transformação linear. Pelo Teorema 5.2 na página 117 a transformação T é dada por
−
−
−
T (→
x ) = A→
x,
para todo →
x ∈ Rn ,
−
−
−
onde A = (aij )m×n = T (→
e 1 ) · · · T (→
e n ) , com T (→
e i ), para i = 1, · · · , n escritos como matrizes colunas e
→
−
→
−
→
−
e 1 = (1, 0, · · · , 0), e 2 = (0, 1, 0, · · · , 0), · · · , e n = (0, · · · , 0, 1). Assim, o núcleo de T é o espaço solução do sistema
→
−
−
homogéneo A→
x = 0 e a imagem de T é o subespaço gerado pelas colunas de A, ou seja, é o espaço coluna de A.
5.2.1
Injectividade e Sobrejectividade
Dizemos que uma função f : A → B é sobrejectiva se, para todo b ∈ B existe a ∈ A tal que f (a) = b, ou seja, se a
imagem de f é igual a B. No caso em que f é uma transformação linear, obtemos como consequência do Teorema
5.4 o seguinte resultado.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
121
Capítulo 5. Transformações Lineares
−
−
Corolário 5.4.1 Seja T : Rn → Rm uma transformação linear. Seja {→
v 1, · · · , →
v n } uma base de Rn . T é
→
−
→
−
m
sobrejectiva se, e somente se, T ( v 1 ), · · · , T ( v n ) geram o R .
→
−
Exemplo 5.15 Toda transformação linear do Rn em R não nula, f : Rn → R é sobrejectiva, pois { 0 } e R são
os únicos subespaços do espaço vectorial R.
Exemplo 5.16 As reflexão em relação a uma recta que passa pela origem e a rotação são sobrejectivas enquanto
que a projecção ortogonal em uma recta que passa pela origem não é sobrejectiva (Exemplos 6.13 e 6.14 na página
378).
Dizemos que uma função f : A → B é injectiva, se f (x) = f (y) implica que x = y.
Teorema 5.5 Seja T : Rn → Rm uma transformação linear. Então, T é injectiva se, e somente se,
→
−
N (T ) = { 0 }.
Demonstração:
→
−
→
−
−
−
−
Suponha que T é injectiva. Seja →
x ∈ N (T ). Então, como T é injectiva, T (→
x ) = T ( 0 ) implica que →
x = 0.
→
−
→
−
→
−
→
−
→
−
→
−
→
−
→
−
Agora, suponha que N (T ) = { 0 }. Se T ( x ) = T ( y ), então T ( x − y ) = 0 , ou seja, x − y ∈ N (T ). Como,
→
−
→
−
−
−
−
−
N (T ) = { 0 }, então →
x −→
y = 0 , ou seja, →
x =→
y.
Exemplo 5.17 A reflexão em relação a uma recta que passa pela origem e a rotação são injectivas, enquanto que
a projecção ortogonal em uma recta que passa pela origem não é injectiva (Exemplos 6.13 e 6.14 na página 378).
Teorema 5.6 ((da Dimensão do Núcleo e da Imagem)) Seja T : Rn → Rm uma transformação linear. Se
Rn tem dimensão finita, então a soma da dimensão do núcleo de T com a dimensão da imagem de T é igual a
dimensão do Rn , ou seja,
dim(N (T )) + dim(J (T )) = dim(Rn ).
Demonstração:
−
−
Vamos supor que 1 ≤ dim(N (T )) < n. Sejam →
v 1, · · · , →
v p vectores do Rn , que formam uma base para o núcleo de
−
−
−
−
−
−
T . Vamos estendê-la a uma base do Rn . Sejam →
v p+1 , · · · , →
v n vectores do Rn tais que →
v 1, · · · , →
v p, →
v p+1 , · · · , →
vn
−
−
formam uma base do Rn . Vamos mostrar que T (→
v p+1 ), · · · , T (→
v n ) formam uma base da imagem de T . Para isso,
precisamos mostrar que eles geram a imagem de T e que são L.I.
−
−
−
−
Pelo Teorema 5.4 na página 119, T (→
v p+1 ), · · · , T (→
v n ) geram a imagem de T , pois T (→
v 1 ) = = · · · = T (→
v p) =
→
−
→
−
→
−
0 . Vamos mostrar que T ( v p+1 ), · · · , T ( v n ) são linearmente independentes. Considere a combinação linear nula
→
−
−
−
xp+1 T (→
v p+1 ) + · · · + xn T (→
v n) = 0 .
Pela linearidade de T segue que
→
−
−
−
T (xp+1 →
v p+1 + · · · + xn →
v n) = 0 .
−
−
−
Mas isto implica que xp+1 →
v p+1 +· · ·+xn →
v n ∈ N (T ). Assim, existem escalares y1 , · · · , yp tais que xp+1 →
v p+1 +
→
−
→
−
→
−
· · · + xn v n = y1 v 1 + · · · + yp v p . De onde segue que
→
−
−
−
−
−
y1 →
v 1 + · · · + yp →
v p − xp+1 →
v p+1 − · · · − xn →
vn = 0.
−
−
−
−
Como →
v 1, · · · , →
v n é uma base do Rn , então y1 = · · · = yp = xp+1 = · · · = xn = 0, ou seja, T (→
v p+1 ), · · · , T (→
v n)
são L.I.
Portanto, a dimensão da imagem de T é igual a diferença entre a dimensão do Rn e a dimensão do núcleo de T ,
de onde segue o resultado.
Em geral, uma transformação linear pode ser injectiva sem ser sobrejectiva e sobrejectiva sem ser injectiva.
Entretanto, se a dimensão do domínio for igual a dimensão do contradomínio temos o seguinte resultado, que é uma
consequência imediata do Teorema 5.6 da Dimensão do Núcleo e da Imagem.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
122
Capítulo 5. Transformações Lineares
Corolário 5.6.1 Seja T : Rn → Rm uma transformação linear entre espaços de dimensão finita. Suponha que
dim(Rn ) = dim(Rm ).
(a) Se T é sobrejectiva, então T é injectiva.
(b) Se T é injectiva, então T é sobrejectiva.
Se uma transformação linear T : Rn → Rm é injectiva e sobrejectiva, então T é chamada isomorfismo.
Exercícios Numéricos
5.2.1 Seja P a transformação do R3 em R3 , definida por P (x, y, z) = (x, y, 0). Se a imagem de uma recta r, por P ,
é um ponto, então quais são as equações paramétricas da recta r?
5.2.2 Seja T : R3 → R3 uma transformação linear dada por T (x, y, z) = (z, x − y, −z).
(a) Encontre uma base para o núcleo de T .
(b) Encontre uma base para a imagem de T .
(c) Descreva geometricamente o núcleo e a imagem de T .
5.2.3 Seja T : Rn → R5 uma transformação linear.
(a) Se T é sobrejectiva e dim(N (T )) = 2, qual o valor de n?
(b) Se T é sobrejectiva e injectiva, qual o valor de n?
5.2.4 Dê exemplos de transformações lineares T : R3 → R3 tais que
(a) N (T ) = {(x, y, z) ∈ R3 : z = −x},
(b) J (T ) = {(x, y, z) ∈ R3 : x = y}.
5.2.5 Dê um exemplo de uma transformação linear T : R2 → R2 tal que N (T ) = J (T ).
Exercícios Teóricos
5.2.6 Determine o núcleo e a imagem do operador linear definido no Exercício 11 na página 118.
5.2.7 Considere o plano π : ax + by + cz = 0.
(a) Determine o núcleo e a imagem da projecção ortogonal no plano π, Pπ . Responda se Pπ é sobrejectiva e
se é injectiva.
(b) Determine o núcleo e a imagem da reflexão em relação ao plano π, Rπ . Responda se Rπ é sobrejectiva e
se é injectiva.
5.2.8 Considere a recta r : (x, y, z) = t(a, b, c).
(a) Determine o núcleo e a imagem da projecção ortogonal na recta r, Pr . Responda se Pr é sobrejectiva e se
é injectiva.
(b) Determine o núcleo e a imagem da reflexão em relação à recta r, Rr . Responda se Rr é sobrejectiva e se
é injectiva.
5.2.9 Seja f : R3 → R uma transformação linear.
(a) Mostre que existem escalares a, b, c tais que f (x, y, z) = ax + by + cz.
(b) Descreva geometricamente todas as possibilidades para o núcleo de f .
−
−
5.2.10 Sejam T : Rn → Rm uma transformação linear e B = {→
v 1, . . . , →
v n } um conjunto de vectores de Rn . Mostre
→
−
→
−
que se C = {T ( v 1 ), . . . , T ( v n )} é L.I., então B também o é.
5.2.11 Seja Rn um espaço vectorial de dimensão finita. Seja T : Rn → Rm uma transformação linear. Mostre que
T é injectiva se, e somente se, dim(J (T )) = n.
5.2.12 Seja T : Rn → Rm uma transformação linear. Mostre que T é injectiva se, e somente se, a imagem de todo
conjunto de vectores linearmente independente é um conjunto de vectores linearmente independente.
5.2.13 Sejam T : Rn → Rn uma transformação linear. Mostre que T é injectiva se, e somente se, a imagem por T
de uma base de Rn é uma base de Rn .
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
123
Capítulo 5. Transformações Lineares
5.3
Composição de Transformações Lineares
Sejam T : Rn → Rp e S : Rp → Rm transformações lineares. A composição de S com T , denotada por ST é a
função do Rn em Rm definida por
−
−
(ST )(→
x ) = S(T (→
x )),
para todo
→
−
x ∈ Rn .
Teorema 5.7 Se T : Rn → Rp e S : Rp → Rm são transformações lineares, então a composição ST : Rn → Rm
é uma transformação linear.
Demonstração:
−
−
Sejam →
x 1, →
x 2 ∈ Rn e α, β escalares.
−
−
(ST )(α→
x 1 + β→
x 2)
−
−
−
−
S(T (α→
x 1 + β→
x 2 )) = S(αT (→
x 1) + βT (→
x 2 ))
→
−
→
−
→
−
−
αS(T ( x 1 )) + βS(T ( x 2 )) = α(ST )( x 1 ) + β(ST )(→
x 2)
=
=
5.3.1
Matriz de uma Transformação Linear
−
−
−
Definição 5.3 Seja B = {→
v 1, . . . , →
v n } uma base do Rn . Todo vector →
v ∈ Rn se escreve de maneira única
→
−
→
−
como combinação linear de v 1 , . . . , v n (Teorema 4.8 na página 106), ou seja, existem escalares α1 , . . . , αn tais
−
−
−
−
que →
v = α1 →
v 1 + · · · + αn →
v n . Definimos o vector de coordenadas de →
v em relação à base (ordenada)
−
−
B = {→
v 1, . . . , →
v n }, por
α1
α2
−
[→
v ]B =
.. .
.
αn
−
−
As coordenadas de um vector →
v em relação à base B são os escalares que aparecem quando escrevemos →
v
−
−
−
−
−
−
como combinação linear dos vectores da base B. Assim, [→
v 1 ]B = →
e 1 , [→
v 2 ]B = = →
e 2 , . . . , [→
v n ]B = →
e n , em que
→
−
−
−
−
−
−
e 1, . . . , →
e n são os vectores da base canónica do Rn . Pois, →
v i = 0→
v 1 + · · · + 1→
v i + · · · + 0→
v n , para i = 1, . . . , n.
→
−
→
−
→
−
→
−
n
m
Sejam B = { v 1 , . . . , v n } e C = { w 1 , . . . , w m } bases do R e R , respectivamente. Seja T : Rn → Rm uma
transformação linear. Sejam
x1
a11
a12
a1n
x2
a21
a22
a2n
−
→
−
→
−
→
−
[→
v ]B =
..
.. , [T ( v 1 )]C = .. , [T ( v 2 )]C = .. , . . . , [T ( v n )]C =
.
.
.
.
.
xn
am1
am2
amn
Então,
−
T (→
v)
=
=
=
−
−
−
−
T (x1 →
v 1 + · · · + xn →
v n ) = x1 T (→
v 1 ) + · · · + xn T (→
v n)
→
−
→
−
→
−
x (a w + · · · + a w ) + · · · + x (a w + · · · + a
1
11
1
m1
m
n
1n
→
−
mn w m )
1
−
−
(x1 a11 + · · · + xn a1n )→
w 1 + · · · + (x1 am1 + · · · + xn amn )→
w m.
−
Como escrevemos o vector T (→
v ) como combinação
→
−
coordenadas de T ( v ) em relação à base C, ou seja,
a11 x1 + · · · + a1n xn
a21 x1 + · · · + a2n xn
−
=
[T (→
v )]C =
..
.
am1 x1 + · · · + amn xn
linear dos vectores da base C, então os escalares são as
a11
a21
..
.
am1
a12
a22
..
.
am2
···
···
···
a1n
a2n
..
.
amn
x1
x2
.
.
.
xn
−
= A[→
v ]B ,
−
−
em que A = [[T (→
v 1 )]C . . . [T (→
v n )]C ]. Esta matriz é chamada matriz da transformação linear T em relação
às bases B e C e é denotada por [T ]C
B , ou seja,
→
−
→
−
[T ]C
B = [[T ( v 1 )]C . . . [T ( v n )]C ].
Isto prova o seguinte resultado, que é uma generalização do Teorema 5.2 na página 117.
−
−
−
−
Teorema 5.8 Sejam B = {→
v 1, . . . , →
v n } e C = {→
w 1, . . . , →
w m } bases do Rn e Rm , respectivamente. Seja T : Rn →
m
R uma transformação linear. Então, a matriz m × n
→
−
→
−
[T ]C
B = [[T ( v 1 )]C . . . [T ( v n )]C ],
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
124
Capítulo 5. Transformações Lineares
é tal que
−
→
−
−
[T (→
v )]C = [T ]C
para todo vector →
v ∈ Rn .
B [ v ]B ,
→
−
→
−
→
−
−
Aqui [ v ]B é o vector v de coordenadas relativas à base B, [T ( v )]C é o vector T (→
v ) de coordenadas relativas
→
−
→
−
C
à base C e a matriz [T ]B = [[T ( v 1 )]C . . . [T ( v n )]C ] é a matriz da transformação linear T em relação às bases B
e C.
−
−
Quando a transformação linear é a transformação identidade I : Rn → Rn , definida por I(→
x) = →
x , para todo
→
−
n
x ∈ R , então aplicando o resultado anterior (Teorema 5.8) a esta transformação, obtemos uma relação entre as
−
coordenadas de um vector →
x relativamente às duas bases.
−
−
−
−
[→
x ] = [I(→
x )] = [I]C [→
x ] = P [→
x] ,
C
C
B
B
B
−
−
em que P = [[→
v 1 ]C . . . [→
v n ]C ] é chamada matriz mudança de base de B para C.
−
−
−
−
−
Corolário 5.8.1 Sejam B = {→
v 1, . . . , →
v n } e C = {→
w 1, . . . , →
w n } bases do Rn . Então, para todo →
x ∈ Rn ,
−
−
[→
x ] = [I]C [→
x] ,
C
B
B
→
−
→
−
n
n
em que P = [I]C
B = [[ v 1 ]C . . . [ v n ]C ] é a matriz da transformação linear identidade I : R → R em relação às
bases C e B.
−
−
−
−
Exemplo 5.18 Sejam B = {→
e 1 = (1, "
0), →
e #2 = (0, 1)} e C = {→
v 1 = (1, 1), →
v 2 = (1, −1)} bases do R2 . Como B é
x
a base canónica, temos que [(x, y)]B =
. Vamos encontrar [(x, y)]C .
y
[(x, y)]C = [IR2 ]C
B [(x, y)]B .
→
−
→
−
−
−
Para determinarmos [IR2 ]C
=
[[
e
]
[
e
]
]
directamente
precisamos saber escrever →
e1 e →
e 2 em termos da
1 C
2 C
B
base C. Para isto precisamos resolver as equações:
→
−
−
−
−
−
−
e =x →
v +y →
v
e →
e =x →
v +y →
v .
1
1
1
1
2
2
2
1
2
2
−
−
Temos que resolver dois sistemas lineares que têm a mesma matriz A = [→
v1 →
v 2 ]. Como a matriz A é invertível
e é fácil encontrar a inversa de uma matriz 2 × 2 (ver por exemplo Exemplo 2.19 na página 45), podemos obter as
−
−
soluções dos sistemas como A−1 →
e 1 e A−1 →
e 2 . Como
"
#! −1 "
#
1
1
1/2
1/2
A−1 =
=
,
1 −1
1/2 −1/2
então
→
−
→
−
−
−
−1 →
[I]C
e 1 A−1 →
e 2] =
B = [[ e 1 ]C [ e 2 ]C ] = [A
Portanto
[(x, y)]C =
[I]C
B [(x, y)]B
=
"
1/2
1/2
1/2
−1/2
#"
x
y
"
1/2
1/2
#
"
=
1/2
−1/2
#
(x + y)/2
(x − y)/2
.
#
.
−
−
Teorema 5.9 Sejam T : Rn → Rp e S : Rp → Rm transformações lineares. Sejam B = {→
v 1, . . . , →
v n }, C =
→
−
→
−
→
−
→
−
n
p
m
{ u 1 , . . . , u p } e D = { w 1 , . . . , w m } bases do R , R e R , respectivamente.
Então,
D
C
[ST ]D
B = [S]C [T ]B .
Ou seja, a matriz da composição de duas transformações lineares é o produto das matrizes das transformações
lineares.
Demonstração:
C
D
Sejam A = [S]D
C , B = [T ]B e C = [ST ]B . Vamos mostrar que C = AB.
−
(ST )(→
v j)
=
−
S(T (→
v j )) = S
p
X
−
bkj →
uk
k=1
=
p
X
k=1
bkj
m
X
i=1
−
aik →
wi =
!
p X
m
X
=
p
X
−
bkj S(→
u k)
k=1
−
aik bkj →
wi =
k=1 i=1
Mas, por definição da matriz de uma transformação linear
m
X
−
−
(ST )(→
v j) =
cij →
w i.
m
X
i=1
p
X
k=1
aik bkj
!
→
−
w i.
i=1
p
P
−
−
Como os vectores →
w 1, . . . , →
w m são L.I., então cij =
aik bkj , ou seja, C = AB, como queríamos provar.
k=1
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
125
Capítulo 5. Transformações Lineares
5.3.2
Invertibilidade
Dizemos que uma transformação linear T : Rn → Rm é invertível se, existe uma função U : Rm → Rn tal que
T U = IRm e U T = IRn . A função U é única (verifique!) e denotada por T −1 .
Teorema 5.10 Seja T : Rn → Rm uma transformação linear invertível. Então, T −1 : Rm → Rn é também uma
transformação linear.
Demonstração:
−
−
−
−
−
−
Sejam →
y 1, →
y 2 ∈ Rm e α, β escalares. Sejam →
x 1 = T −1 (→
y 1) e →
x 2 = T −1 (→
y 2 ). Então,
−
−
T −1 (α→
y 1 + β→
y 2)
=
=
o que prova que
T −1
−
−
−
−
T −1 (αT (→
x 1 ) + βT (→
x 2 ) = T −1 (T (α→
x 1 + β→
x 2 ))
→
−
→
−
−
−
−1 →
−1 →
α x + β x = αT ( y ) + βT ( y ),
1
2
1
2
é uma transformação linear.
Lembramos que uma função f : A → B é invertível se, e somente se, é injectiva e sobrejectiva.
−
−
−
−
Teorema 5.11 Sejam B = {→
v 1, . . . , →
v n } e C = {→
w 1, . . . , →
w m } bases dos espaços vectoriais Rn e Rm , respectivan
m
mente. Uma transformação linear T : R → R é invertível se, e somente se, [T ]C
B é invertível. Além disso, se T
C −1 .
é invertível, então [T −1 ]B
C = ([T ]B )
Demonstração:
Suponha, em primeiro lugar, que T é invertível. Então T é injectiva e sobrejectiva, o que implica, pelo Teorema
da Dimensão do Núcleo e da Imagem 5.6 na página 121, que n = dim(Rn ) = dim(Rm ) = m. Além disso, existe uma
transformação linear, T −1 , tal que T T −1 = IRm e T −1 T = IRn . Assim,
C
−1 B
T ]B = [T −1 ]B
In = [IRn ]B
C [T ]B .
B = [T
−1
C
Portanto, a matriz [T ]C
= [T −1 ]B
B é invertível e [T ]B
C.
Suponha, agora, que A = [T ]C
é
uma
matriz
invertível. Então, A é uma matriz quadrada e dim(Rn ) = n =
B
→
−
→
−
−
−
−
m = dim(Rm ). Vamos mostrar que N (T ) = { 0 }. Seja →
v ∈ N (T ). Então, [T (→
v )]C = A[→
v ]B = 0 . Como A
→
−
→
−
→
−
→
−
é invertível, então [ v ]B = 0 . O que implica que v = 0 . Assim T é injectiva (Teorema 5.5 na página 121) e
como dim(Rn ) = dim(Rm ), então pelo Corolário 5.6.1 na página 122 segue que T é também sobrejectiva e portanto
invertível.
Exemplo 5.19 Seja T : R3 → R3 definida por T (x, y, z) = (x + y + 2z, y + 2z, z), para todo (x, y, z) ∈ R3 . Vamos
−
−
−
verificar se T é invertível. Seja B = {→
e 1, →
e 2, →
e 3 }. Vamos determinar a matriz de T em relação a B. Para isto,
vamos escrever o resultado da aplicação T em cada elemento de B como combinação linear dos elementos de B.
−
−
−
−
−
T (→
e 1) = →
e1
= 1→
e 1 + 0→
e 2 + 0→
e3
→
−
→
−
→
−
→
−
→
−
→
T ( e 2) =
e1+ e2
= 1 e 1 + 1 e 2 + 0−
e3
−
−
−
−
−
−
−
T (→
e ) = 2→
e + 2→
e +→
e
= 2→
e + 2→
e + 1→
e
3
1
2
3
1
2
3
1
1
0
2
2 .
1
Assim, a matriz de T em relação a B é
[T ]B
B
1
→
−
→
−
→
−
= [T ( e 1 )]B [T ( e 2 )]B [T ( e 3 )]B = 0
0
Esta matriz é invertível e assim pelo Teorema 5.11 a transformação linear T é invertível e
1 −1
0
−1 B
B −1
[T ]B = ([T ]B )
= 0
1 −2 .
0
0
1
Vamos determinar uma expressão para T −1 . Pelo Teorema 5.8 na
1 −1
0
−1
−1 B
[T (x, y, z)]B = [T ]B [(x, y, z)]B = 0
1 −2
0
0
1
Portanto, T −1 (x, y, z) = (x − y, y − 2z, z).
página
x
y
z
123, temos que
x−y
= y − 2z .
z
−
−
Quando a transformação linear é a transformação identidade I : Rn → Rn , definida por I(→
x) = →
x , para todo
→
−
x ∈ Rn , então aplicando o resultado anterior (Teorema 5.11) a esta transformação, obtemos o seguinte resultado.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
126
Capítulo 5. Transformações Lineares
−
−
−
−
Corolário 5.11.1 Sejam B = {→
v 1, . . . , →
v n } e C = {→
w 1, . . . , →
w n } bases do Rn . A matriz mudança de base
C
P = [I]B é invertível e
−1
P −1 = ([I]C
= [I]B
B)
C.
Exemplo 5.20 Vamos determinar a expressão da transformação linear que faz uma rotação de um ângulo θ no
sentido anti-horário em torno de um eixo que passa pela origem e tem a direcção e o sentido dados por um vector
−
−
−
−
unitário →
u = (a, b, c). Seja C = {→
u 1, →
u 2, →
u 3 }, em que
→
−
u1
=
→
−
u2
=
→
−
u3
=
→
−
u = (a, b, c)
b
a
(− √
,√
, 0)
a2 + b2
a2 + b2
p
bc
ac
,−√
, a2 + b2 ).
(− √
2
2
2
2
a +b
a +b
É fácil verificar que esta é uma base ortonormal, ou seja, uma base em que os seus vectores são unitários
mutuamente ortogonais. Além disso, temos que
−
Rθ (→
u 1)
=
−
Rθ (→
u 2)
=
−
Rθ (→
u 3)
=
→
−
u 1 = (a, b, c)
−b cos θ − ac sin θ a cos θ − bc sin θ p 2
−
−
cos θ →
u 2 + sin θ →
u3 = (
,
, a + b2 sin θ)
√
√
a2 + b2
a2 + b2
b sin θ − ac cos θ −a sin θ − bc cos θ p 2
−
−
− sin θ →
u 2 + cos θ →
u3 = (
√
,
√
, a + b2 cos θ).
a2 + b2
a2 + b2
−
−
−
Se B = {→
e 1, →
e 2, →
e 3 } é a base canónica do R3 , então
→
−
→
−
−
B →
−
−
−
Rθ,→
u ( x ) = [Rθ,→
u ( x )]B = [Rθ,→
u ]B [ x ]B .
−
−
Podemos escrever Rθ,→
u = Rθ,→
u I e assim
B
B
B
C
−
−
−
[Rθ,→
u ]B = [Rθ,→
u I]B = [Rθ,→
u ]C [I]B .
Agora,
h
i h
i
→
−
→
−
→
−
→
−
→
−
→
−
B
−
−
−
−
−
−
−
[Rθ,→
u ]C = [Rθ,→
u ( u 1 )]B [Rθ,→
u ( u 2 )]B [Rθ,→
u ( u 3)]B = Rθ,→
u ( u 1 ) Rθ,→
u ( u 2 ) Rθ,→
u ( u 3) ,
e
−1 −1
−
−
−
−
−
−
B
= [→
u1 →
u2 →
u 3 ]T ,
[I]C
= [→
u 1 ]B [→
u 2 ]B [→
u 3 ]B
B = [I]C
−
−
−
pois B é a base canónica e os vectores →
u 1, →
u2 e →
u 3 são unitários mutuamente ortogonais. Assim,
→
−
−
→
−
→
−
→
−
→
− →
− →
− T→
−
B →
−
−
−
−
−
Rθ,→
u ( x ) = [Rθ,→
u ]C [ x ]C = [Rθ,→
u ( u 1 ) Rθ,→
u ( u 2 ) Rθ,→
u ( u 3 )][ u 1 u 2 u 3 ] x .
Mas,
a
=
b
c
→
−
→
−
→
−
→
− →
− →
− T
−
−
−
[Rθ,→
u ( u 1 ) Rθ,→
u ( u 2 ) Rθ,→
u ( u 3 )][ u 1 u 2 u 3 ] =
−b cos θ − ac sin θ
b sin θ − ac cos θ
a
b
c
√
√
a
a2 + b2
a2 + b2
−√ b
√
0
a cos θ − bc sin θ
−a sin θ − bc cos θ
a2 + b2
a2 + b2
√
√
2
2
2
2
√
ac
bc
√ a +b
√ a +b
−√
−√
a2 + b2
a2 + b2 sin θ
a2 + b2 cos θ
2
2
2
2
a +b
a +b
a2 (1 − cos θ) + cos θ
ab(1 − cos θ) − c sin θ ac(1 − cos θ) + b sin θ
= ab(1 − cos θ) + c sin θ
b2 (1 − cos θ) + cos θ
bc(1 − cos θ) − a sin θ
2
ac(1 − cos θ) − b sin θ bc(1 − cos θ) + a sin θ
c (1 − cos θ) + cos θ
−
que é a matriz de Rθ,→
u em relação à base canónica. Finalmente,
x
a2 (1 − cos θ) + cos θ
ab(1 − cos θ) − c sin θ
−
=
Rθ,→
y
ab(1
−
cos
θ)
+
c
sin
θ
b2 (1 − cos θ) + cos θ
u
z
ac(1 − cos θ) − b sin θ bc(1 − cos θ) + a sin θ
5.3.3
ac(1 − cos θ) + b sin θ
x
bc(1 − cos θ) − a sin θ y .
2
c (1 − cos θ) + cos θ
z
Semelhança
−
−
−
−
Corolário 5.11.2 Sejam B = {→
v 1, . . . , →
v n } e C = {→
w 1, . . . , →
w n } bases de um espaço vectorial Rn . Se T : Rn →
n
R é uma transformação linear, então
−1
[T ]C
[T ]B
C = P
B P.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
127
Capítulo 5. Transformações Lineares
Demonstração:
Pelo Teorema 5.9 na página 124 temos que
C
B
B
[T ]C
C = [I]B [T ]B [I]C .
−1 = [I]C . De onde segue o resultado.
Mas pelo Corolário 5.11.1 na página 126 a matriz P = [I]B
C é invertível e P
B
Uma transformação linear de um espaço vectorial Rn nele mesmo é chamada um operador linear. Sejam A e
B matrizes n × n. Dizemos que B é semelhante a A se existe uma matriz invertível P tal que B = P −1 AP . Observe
que com esta terminologia o Corolário 5.11.2 pode ser estabelecido da seguinte forma:
−
−
Se T : Rn → Rn é uma transformação linear, B = {→
v 1, . . . , →
v n} e C =
→
−
→
−
n
C
B
{ w 1 , . . . , w n } são bases do R , então [T ]C é semelhante a [T ]B .
O traço de uma matriz quadrada A, denotado por tr(A), é definido como sendo a soma dos elementos da sua
diagonal principal. Como tr(AB) = tr(BA) (Exercício 26 na página 10), então
tr(P −1 AP ) = tr(A).
Assim, em virtude do Corolário 5.11.2, se Rn é um espaço vectorial de dimensão finita, podemos definir o traço
de um operador linear T : Rn → Rn como sendo
tr(T ) = tr([T ]B
B ),
onde B é uma base do Rn .
De forma análoga, como det(AB) = det(A) det(B) = det(BA) (Teorema 2.10 na página 43), então
det(P −1 AP ) = det(A).
Assim, em virtude do Corolário 5.11.2, se Rn é um espaço vectorial de dimensão finita, podemos definir o
determinante de um operador linear T : Rn → Rn como sendo
det(T ) = det([T ]B
B ),
onde B é uma base do Rn .
Exemplo 5.21 Vamos obter uma expressão para a reflexão na recta r : y = 2x, Rr : R2 → R2 , usando o Corolário
5.11.2. Vamos escolher uma base do R2 , tal que a avaliação de Rr nos elementos desta base seja fácil de se obter.
−
−
Por exemplo, C = {→
v 1 = (1, 2), →
v 2 = (−2, 1)}.
−
Rr (→
v 1)
→
Rr (−
v 2)
=
=
Rr (1, 2)
Rr(−2, 1)
=
=
Assim,
B = [Rr ]C
C =
(1, 2)
(2, −1)
"
1
0
0
−1
=
=
#
−
−
1→
v 1 + 0→
v2
.
→
−
→
0 v 1 − 1−
v2
.
A matriz mudança de base, da base C para a base canónica B = {(1, 0), (0, 1)} é dada por
"
#
1 −2
B
P = [IR2 ]C =
.
2
1
Pelo Corolário 5.11.2, a matriz A = [Rr ]B
B é obtida através da equação matricial
B
C
C
−1
A = [Rr ]B
.
B = [IR2 ]C [Rr ]C [IR2 ]B = P BP
Vamos enunciar uma versão mais geral do Corolário 5.11.2, cuja demonstração é inteiramente análoga e deixamos
como exercício para o leitor.
−
−
−
−
Corolário 5.11.3 Seja T : Rn → Rm uma transformação linear. Sejam B = {→
v 1, . . . , →
v n } e B ′ = {→
v ′1 , . . . , →
v ′n }
→
−
→
−
→
−
→
−
n
′
′
′
m
bases do R e C = { w 1 , . . . , w m } e C = { w 1 , . . . , w m } bases do R . Então,
′
−1
[T ]C
[T ]C
B Q,
B′ = P
onde P é a matriz mudança de base de C ′ para C e Q, de B′ para B.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
128
Capítulo 5. Transformações Lineares
Exercícios Numéricos
5.3.1 Seja T : R2 → R2 a transformação linear dada por T (x, y) = (2x + y, x − 3y), para todo (x, y) ∈ R2 . Seja
C = {(1, 1), (1, 2)}. Determine [T ]C
C.
−
−
−
3
3
5.3.2 Seja T : R → R definida por T (→
x ) = A→
x , para todo →
x ∈ R3 , onde
3
A= 0
0
−
−
−
Sejam →
v 1 = (1, 0, 0), →
v 2 = (1, 2, 0) e →
v 3 = (0, −2, 1).
−1
0
0
−2
−2 .
−1
−
−
−
−
−
−
(a) Encontre a matriz mudança de base de C = {→
v 1, →
v 2, →
v 3 } para a base canónica B = {→
e 1, →
e 2, →
e 3 }.
(b) Use a matriz obtida no item anterior para determinar a matriz B que representa T com relação à base
−
−
−
{→
v 1, →
v 2, →
v 3 }.
−
−
−
−
−
−
5.3.3 Considere a recta r : (x, y, z) = t(1, 1, 1). Sejam B = {→
c ,→
e 2, →
e 3 } a base canónica do R3 e C = {→
u ,→
u 2, →
u 3}
√
√ 1
√ 1
→
−
→
−
→
−
3
uma base ortonormal do R definida por u 1 = 1/ 3(1, 1, 1), u 2 = 1/ 2(−1, 1, 0) e u 3 = 1/ 6(−1, −1, 2).
B
(a) Seja Pr : R3 → R3 a projecção ortogonal na recta r. Encontre [Pr ]C
C e [Pr ]B .
B
(b) Seja Rr : R3 → R3 a reflexão em relação à recta r. Encontre [Rr ]C
C e [Rr ]B .
−
−
−
−
−
−
5.3.4 Considere a recta r : (x, y, z) = t(1, 1, 0). Sejam B = {→
e ,→
e 2, →
e 3 } a base canónica do R3 e C = {→
u 1, →
u 2, →
u 3}
√ 1
√
−
−
−
uma base ortonormal do R3 definida por →
u 1 = 1/ 2(1, 1, 0), →
u 2 = (0, 0, 1) e →
u 3 = 1/ 2(1, −1, 0). Seja
Rπ/2,r ) : R3 → R3 a transformação linear, que é uma rotação de um ângulo de π/2 em torno da recta r.
B
Determine [Rπ/2,r ]C
C e [Rπ/2,r ]B .
5.3.5 Para cada uma das transformações lineares T verifique se T é invertível e calcule a inversa, T −1 , se ela existe.
(a) T : R3 → R3 definida por T (x, y, z) = (x + 2y + z, y + 2z, z).
(b) T : R3 → R3 definida por T (a, b, c) = (a, −2a + b, −2a − 4b + c).
(c) T : R3 → R3 definida por T (a, b, c) = (a + b + c, a + 2b + c, a + 2c).
(d) T : R3 → R3 definida por T (a, b, c) = (a + b + c, −a + c, a + c).
Exercícios Teóricos
5.3.6 Mostre que se T : R2 → R2 é uma transformação linear invertível, então T é uma composição de expansões,
compressões, cisalhamentos e reflexões.
5.3.7 Seja A uma matriz triangular superior n × n com todos os elementos da diagonal iguais a zero. Mostre que
An = 0. (Sugestão: considere o operador T : Rn → Rn cuja matriz na base canónica é igual a A e determine
a matriz de T n .)
−
−
−
−
5.3.8 Seja T : Rn → Rm uma transformação linear. Sejam B = {→
v 1, . . . , →
v n } e B′ = {→
v ′1 , . . . , →
v ′n } bases do Rn e
−
−
−
−
C = {→
w ,...,→
w } e C ′ = {→
w′ ,...,→
w ′ } bases do Rm . Mostre que
1
m
1
m
′
−1
[T ]C
[T ]C
B Q,
B′ = P
onde P é a matriz mudança de base de C ′ para C e Q, de B′ para B. (Sugestão: siga a demonstração do
Corolário 5.11.2 na página 126.)
−
−
5.3.9 Seja B = {→
v 1, . . . , →
v n } uma base do espaço vectorial Rn . Seja P uma matriz n × n invertível. Mostre que
n
P
−
−
−
−
C = {→
w 1, . . . , →
w n } é uma base do Rn , onde →
wj =
pij →
v i , para j = 1, . . . , n. Assim, P é a matriz mudança
de base de B para C.
i=1
5.3.10 Um operador T : Rn → Rn é chamado nilpotente se T n = O, a transformação linear nula, para algum
→
−
→
−
−
−
n ∈ N. Seja T um operador nilpotente. Mostre que existe um vector →
v 6= 0 tal que T (→
v)= 0.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
Capítulo 6
Diagonalização
6.1
6.1.1
Diagonalização de Matrizes
Motivação
Certos processos são descritos em cada estágio por uma matriz A quadrada e em k estágios pela potência k da
matriz A, Ak , em que k é um número inteiro positivo. Suponha que desejamos saber a matriz que corresponde a k
estágios, para k um inteiro positivo qualquer. Se a matriz A é diagonal,
λ1
0
···
0
0
λ2 · · ·
0
A=
..
..
..
..
,
.
.
.
.
0
···
0
λn
então
Ak =
λk1
0
.
..
0
0
λk2
.
..
···
···
···
..
.
0
0
.
..
λkn
0
Se a matriz A não é diagonal, mas existe uma matriz P tal que
λ1
0
0
λ2
A = P DP −1 ,
em que D =
..
..
.
.
0
···
.
···
···
..
.
0
0
..
.
λn
0
então
,
A2 = (P DP −1 )(P DP −1 ) = P D(P −1 P )DP −1 = P D 2 P −1 .
Agora, supondo que
Ak−1
= P D k−1 P −1 , temos que
Ak
=
Ak−1 A = (P DP −1 )k−1 (P DP −1 )
=
(P D k−1 P −1 )(P DP −1 ) = P D k−1 (P −1 P )DP −1
k
λ1
0
···
0
0
k
λ2 · · ·
0
−1
P D k P −1 = P
.
..
.
..
P .
.
.
.
.
.
.
=
0
···
λkn
0
Assim, podemos facilmente encontrar a k-ésima potência de A.
Exemplo 6.1 Seja
A=
"
Mostraremos no Exemplo 6.6 na página 135 que
"
#
1 1
P =
−2 2
1
−4
e
129
#
.
D=
"
−1
1
3
0
0
−1
#
130
Capítulo 6. Diagonalização
são tais que
A = P DP −1 .
Assim,
Ak
#"
#"
1
3k
0
1
2
0
(−1)k
−2
"
# "
#
1
3k
(−1)k
2 −1
−2 3k 2(−1)k
4
2
1
"
#
k
k
k
1
2(3 + (−1) )
(−1) − 3k
.
4
4((−1)k − 3k ) 2(3k + (−1)k )
P D k P −1 =
=
=
=
"
1
−2
1
2
# −1
Vamos descobrir, a seguir, como podemos determinar matrizes P e D, quando elas existem, tais que A = P DP −1 ,
ou multiplicando à esquerda por P −1 e à direita por P , D = P −1 AP , com D sendo uma matriz diagonal. Chamamos
diagonalização ao processo de encontrar as matrizes P e D.
6.1.2
Valores Próprios e Vectores Próprios
Definição 6.1 Dizemos que uma matriz A, n × n, é diagonalizável, se existem matrizes P e D tais que A =
P DP −1 , ou equivalentemente, D = P −1 AP , em que D é uma matriz diagonal.
Exemplo 6.2 Toda matriz diagonal
A=
é diagonalizável, pois
λ1
0
..
.
0
···
···
..
.
0
λ2
..
.
···
0
0
..
.
λn
0
A = (In )−1 AIn .
Vamos supor inicialmente que a matriz A seja diagonalizável. Então existe uma matriz P tal que
P −1 AP = D,
(6.1.1)
em que D é uma matriz diagonal. Vamos procurar tirar conclusões sobre as matrizes P e D.
Multiplicando à esquerda por P ambos os membros da equação anterior, obtemos
(6.1.2)
AP = P D.
Sejam
D=
λ1
0
..
.
0
0
λ2
..
.
···
···
···
..
.
0
0
..
.
λn
e
− →
−
P = →
v1 −
v 2 ... →
vn ,
0
−
em que →
v j é a coluna j de P . Por um lado
− →
−
−
−
−
AP = A →
v1 −
v 2 ... →
v n = A→
v 1 A→
v 2 . . . A→
vn
(Exercício 1.1.18 na página 9) e por outro lado
λ1
0
→
−
−
PD = −
v1 →
v 2 ... →
vn
..
.
0
0
λ2
.
..
···
···
···
..
.
0
0
0
.
..
λn
→
−
−
= λ1 −
v 1 λ2 →
v 2 . . . λn →
vn
(Exercício 1.1.17 na página 8). Assim, (6.1.2) pode ser reescrita como,
→
−
−
−
−
−
A−
v 1 A→
v 2 . . . A→
v n == λ1 →
v 1 λ2 →
v 2 . . . λn →
vn .
Logo,
Introdução à Álgebra Linear
−
−
A→
v j = λj →
v j,
Opto, Qui Ind, Mat
2007/2008
131
Capítulo 6. Diagonalização
−
para j = 1, · · · , n. Ou seja, as colunas de P , →
v j , e os elementos da diagonal de D, λj , satisfazem a equação
−
−
A→
v = λ→
v,
−
em que λ e →
v são incógnitas. Isto motiva a seguinte definição.
Definição 6.2 Seja A uma matriz n × n. Um número real λ é chamado valor próprio (real) de A, se existe um
v1
.
−
n
vector não nulo →
v =
.. do R , tal que
vn
−
−
A→
v = λ→
v.
(6.1.3)
Um vector não nulo que satisfaça (6.1.3), é chamado de vector próprio de A.
Observe que a equação (6.1.3) pode ser escrita como
−
−
A→
x = λIn →
x
ou
→
−
−
(A − λIn )→
x = 0.
(6.1.4)
Como os vectores próprios são vectores não nulos, os valores próprios são os valores de λ, para os quais o sistema
→
−
−
(A − λIn )→
x = 0 tem solução não trivial. Mas, este sistema homogéneo tem solução não trivial se, e somente se,
det(A − λIn ) = 0 (Teorema 2.11 na página 44). Assim temos um método para encontrar os valores próprios e os
vectores próprios de uma matriz A.
Teorema 6.1 Seja A uma matriz n × n.
(a) Os valores próprios (reais) de A são as raízes reais do polinómio
p(t) = det(A − tIn )
(6.1.5)
(b) Para cada valor próprio λ, os vectores próprios associados a λ são os vectores não nulos da solução do sistema
→
−
−
(A − λIn )→
x = 0.
(6.1.6)
Definição 6.3 Seja A uma matriz n × n. O polinómio
(6.1.7)
p(t) = det(A − tIn )
é chamado polinómio característico de A.
Assim, para determinarmos os valores próprios de uma matriz A precisamos determinar as raízes reais do seu
polinómio característico, que tem a forma p(t) = (−1)n tn +an−1 tn−1 +· · ·+a1 t+a0 . Um resultado sobre polinómios
que muitas vezes é útil, é o que diz que se a0 , a1 , . . . , an−1 são inteiros, então as suas raízes racionais (se existirem)
são números inteiros e divisores do coeficiente do termo de grau zero a0 . Por exemplo, se p(t) = −t3 + 6t2 − 11t + 6,
então as possíveis raízes racionais são ±1, ±2, ±3 e ±6. Substituindo estes valores em p, vemos que p(1) = 0, ou seja,
1 é uma raiz de p. Finalmente, dividindo p por t − 1, obtemos que p(t) = (t − 1)(−t2 + 5t − 6). Como as raízes de
−t2 + 5t − 6 são 2 e 3, então as raízes de p, são 1, 2 e 3.
Exemplo 6.3 Vamos determinar os valores próprios e vectores próprios da matriz
"
#
1 −1
A=
.
−4
1
Para esta matriz o polinómio característico é
"
p(t) = det(A − tI2 ) = det
1−t
−4
−1
1−t
#
= (1 − t)2 − 4 = t2 − 2t − 3.
Como os valores próprios de A são as raízes de p(t), temos que os valores próprios de A são λ1 = 3 e λ2 = −1.
Agora, vamos determinar os vectores próprios associados aos valores próprios λ1 = 3 e λ2 = −1. Para isto
→
−
→
−
−
−
vamos resolver os sistemas (A − λ1 I2 )→
v = 0 e (A − λ2 I2 )→
v = 0 . Como
"
#
−2 −1
A − λ1 I2 =
,
−4 −2
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
132
Capítulo 6. Diagonalização
então
→
−
−
(A − λ1 I2 )→
v = 0
é
"
ou
−2
−4
(
cuja solução geral é
−1
−2
−2x
−4x
#"
−
−
x
y
#
y
2y
=
"
=
=
#
0
0
0
0
W1 = {(α, −2α) : α ∈ R},
que é o conjunto de todos os vectores próprios associados a λ1 = 3 acrescentado o vector nulo. Agora,
→
−
−
(A − λ2 I2 )→
v = 0
é
"
cuja solução geral é
−1
2
2
−4
#"
x
y
#
=
"
0
0
#
,
W2 = {(α, 2α) : α ∈ R},
que é o conjunto de todos os vectores próprios associados a λ2 = −1 acrescentado o vector nulo.
Exemplo 6.4 Vamos determinar os valores próprios e vectores
4 2 2
A= 2 4 2
2 2 4
próprios da matriz
.
Para esta matriz o polinómio característico é
4−t
2
2
p(t) = det(A − tI3 ) = det
2
4−t
2
2
2
4−t
"
#
"
4−t
2
2
= (4 − t) det
− 2 det
2
4−t
2
#
"
"
2
4−t
2
− 4 det
= (4 − t) det
2
2
4−t
=
=
2
4−t
2
4−t
#
+ 2 det
#
"
2
2
4−t
2
#
(4 − t) [(4 − t)2 − 4] − 8(2 − t)
−t3 + 12t2 − 36t + 32.
Substituindo-se t = ±1 obtemos
p(1) = −1 + 12 − 36 + 32 > 0,
p(−1) = 1 + 12 + 36 + 32 > 0.
Substituindo-se t = 2 obtemos p(2) = 0. Dividindo-se p por t − 2 obtemos que
p(t) = (t − 2)(−t2 + 10t − 16) = (t − 2)2 (8 − t).
Portanto os valores próprios de A são λ1 = 2 e λ2 = 8. Agora, vamos determinar os vectores próprios associados
→
−
→
−
−
−
aos valores próprios λ1 e λ2 . Para isto vamos resolver os sistemas (A − λ1 I3 )→
v = 0 e (A − λ2 I3 )→
v = 0 . Como
→
−
−
(A − λ1 I3 )→
v = 0
é
2
2
2
2
2
2
0
x
2
2 y = 0 .
0
z
2
A forma escalonada reduzida da matriz ampliada
1
0
0
do sistema é
1 1 0
0 0 0 .
0 0 0
→
−
−
Assim, a solução geral do sistema (A − λ1 I3 )→
v = 0 é
W1 = {(−α − β, β, α) : α, β ∈ R},
que é o conjunto de todos os vectores próprios associados a λ1 = 2 acrescentado o vector nulo.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
133
Capítulo 6. Diagonalização
→
−
−
Com relação ao valor próprio λ2 = 8, o sistema (A − λ2 I3 )→
v = 0 é
−4
2
2
x
0
2 y = 0 .
2 −4
2
2 −4
z
0
A forma escalonada reduzida da matriz ampliada do sistema é
1 0 −1 0
0 1 −1 0 .
0 0
0 0
→
−
−
Assim, a solução geral do sistema (A − λ2 I3 )→
v = 0 é
W2 = {(α, α, α) : α ∈ R}.
Nos exemplos anteriores, para cada valor próprio encontrámos todos os vectores próprios associados a ele. Podemos observar que para cada valor próprio λ, o conjunto dos vectores próprios associados a ele acrescentado o vector
→
−
−
nulo é um subespaço, já que é o conjunto solução de um sistema linear homogéneo (A − λIn )→
v = 0 . Este subespaço
recebe o nome de espaço próprio associado ao valor próprio λ.
6.1.3
Diagonalização
Vamos enunciar e demonstrar o resultado principal deste capítulo. Já vimos que se uma matriz A é diagonalizável,
então as colunas da matriz P , que faz a diagonalização, são vectores próprios associados a valores próprios, que por
sua vez são elementos da matriz diagonal D. Como a matriz P é invertível, estes n vectores próprios são L.I. Vamos
mostrar, a seguir, que se a matriz A tem n vectores próprios L.I., então ela é diagonalizável.
−
Teorema 6.2 Seja A uma matriz n × n que tem n vectores próprios L.I. →
v 1, · · ·
respectivamente. Então as matrizes
λ1
0
···
0
i
h
λ2 · · ·
−
−
−
e D=
P = →
v1 →
v 2 ... →
vn
..
..
..
.
.
.
0
···
0
−
,→
v n associados a λ1 , · · · , λn ,
0
0
..
.
λn
são tais que
,
D = P −1 AP,
ou seja A é diagonalizável. Reciprocamente, se A é diagonalizável, então ela possui n vectores próprios linearmente
independentes.
Demonstração:
−
−
Suponha que →
v 1, · · · , →
v n são n vectores próprios linearmente independentes associados a λ1 , · · · , λn , respectivamente. Vamos definir as matrizes
λ1
0
···
0
λ2 · · ·
0
h
i
0
−
−
−
P = →
e D=
v1 →
v 2 ... →
vn
.
.
..
..
.
.
.
.
.
.
.
0
−
−
Como A→
v j = λj →
v j , para j = 1, · · · , n, então
h
i h
→
−
−
−
−
AP = A
v1 →
v 2 ... →
v n = A→
v1
=
h
−
λ1 →
v1
−
λ2 →
v2
...
−
λn →
vn
i
=
h
−
A→
v2
→
−
v1
→
−
v2
...
...
···
−
A→
vn
→
−
vn
0
i
i
λ1
0
..
.
0
λn
0
λ2
..
.
···
···
···
..
.
0
0
0
..
.
λn
= P D.
−
−
Como →
v 1, · · · , →
v n são L.I., a matriz P é invertível. Assim, multiplicando a equação anterior por P −1 à esquerda
obtemos
D = P −1 AP.
Ou seja, a matriz A é diagonalizável.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
134
Capítulo 6. Diagonalização
Vamos agora provar que, se A é diagonalizável, então ela possui n vectores próprios L.I. Se a matriz A é
diagonalizável, então existe uma matriz P tal que
P −1 AP
=
(6.1.8)
D,
em que D é uma matriz diagonal. Multiplicando à esquerda por P ambos os membros da equação anterior, obtemos
(6.1.9)
AP = P D.
Sejam
λ1
0
D=
..
.
0
···
···
..
.
0
λ2
..
.
···
0
0
..
.
λn
e
P =
h
→
−
v1
→
−
v2
0
→
−
em que v j é a coluna j de P . Usando as definições de P e D temos que
i h
h
−
−
−
−
−
AP = A →
v1 →
v 2 ... →
v n = A→
v 1 A→
v2
PD =
h
→
−
v1
→
−
v2
...
i
→
−
vn
Assim, de (6.1.9) segue que
λ1
0
..
.
0
0
λ2
..
.
···
···
···
..
.
0
0
0
..
.
λn
i
...
→
−
vn
...
−
A→
vn
h
−
= λ1 →
v1
−
λ2 →
v2
,
i
...
−
λn →
vn
i
−
−
A→
v j = λj →
v j,
−
−
para j = 1, · · · , n. Como a matriz P é invertível, pelo Teorema 4.3 na página 96, os vectores próprios →
v 1, · · · , →
vn
são L.I.
Assim, se uma matriz A é diagonalizável e D = P −1 AP , então os valores próprios de A formam a diagonal de
D e n vectores próprios linearmente independentes associados aos valores próprios formam as colunas de P .
O resultado que vem a seguir, garante que se conseguirmos para cada valor próprio, vectores próprios L.I., então
ao juntarmos todos os vectores próprios obtidos, eles continuarão sendo L.I.
(1)
(1)
(2)
(2)
−
−
−
−
Teorema 6.3 Seja A uma matriz n×n. Se →
v 1 ,··· ,→
v n1 são vectores próprios L.I. associados a λ1 , →
v 1 ,··· ,→
v n2
(k)
(k)
−
−
são vectores próprios L.I. associados a λ2 , . . ., →
v 1 ,··· ,→
v nk são vectores próprios L.I. associados a λk , com
(1)
(1)
(k)
(k)
−
−
−
−
λ · · · λ distintos, então {→
v
,··· ,→
v
,··· ,→
v
, ··· ,→
v
} é um conjunto L.I.
1
k
n1
1
nk
1
Demonstração:
Vamos demonstrar apenas para o caso em que temos dois valores próprios diferentes. O caso geral é inteira(1)
(1)
(2)
(2)
−
−
−
−
mente análogo. Sejam →
v 1 ,··· ,→
v n1 vectores próprios L.I. associados a λ1 e →
v 1 ,··· ,→
v n2 vectores próprios L.I.
associados a λ2 . Precisamos mostrar que a única solução da equação
→
−
(1) − (1)
(1) − (1)
(2) − (2)
(2) − (2)
x1 →
v 1 + · · · + x k1 →
v n1 + x1 →
v 1 + · · · + x k2 →
v n2 = 0
(6.1.10)
−
é a solução trivial. Multiplicando a equação (6.1.10) por A e usando o facto de que os →
v ( j)i são vectores próprios,
obtemos
−
x1 λ1 →
v1
(1)
(1)
−
−
+ · · · + xk λ1 →
v n1 + x1 λ2 →
v1
(1)
(1)
(2)
(2)
1
→
−
(2)
(2)
−
+ · · · + xk λ2 →
v n2 = 0
(6.1.11)
→
−
(2)
(2)
−
+ · · · + xk λ1 →
v n2 = 0
(6.1.12)
2
Multiplicando a equação (6.1.10) por λ1 , obtemos
−
x1 λ1 →
v1
(1)
(1)
−
−
+ · · · + xk λ1 →
v n1 + x1 λ1 →
v1
(1)
(1)
(2)
(2)
1
2
Subtraindo a equação (6.1.11) da equação (6.1.12), obtemos
→
−
(2)
(2)
(2)
(2)
−
−
x1 (λ2 − λ1 )→
v 1 + · · · + xn2 (λ2 − λ1 )→
v n2 = 0 .
(2)
(2)
(2)
(2)
−
−
Como →
v 1 ,··· ,→
v n2 são L.I., temos que x1 = · · · = xn2 = 0. Agora, multiplicando a equação (6.1.10) por λ2
e subtraindo da equação (6.1.12) obtemos
→
−
(1)
(1)
(1)
(1)
−
−
x1 (λ2 − λ1 )→
v 1 + · · · + xn1 (λ2 − λ1 )→
v n1 = 0 .
(1)
(1)
(1)
(1)
−
−
Como →
v 1 ,··· ,→
v n1 são L.I., temos que x1 = · · · = xn1 = 0. O que prova que todos os vectores próprios
juntos são L.I.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
135
Capítulo 6. Diagonalização
Exemplo 6.5 Considere a matriz
4
A= 2
2
2
2 .
4
2
4
2
Já vimos no Exemplo 6.4 na página 132 que seu polinómio característico é p(t) = (t − 2)(−t2 + 10t − 16) =
(t − 2)2 (8 − t), os seus valores próprios são λ1 = 2 e λ2 = 8 e os espaços próprios correspondentes são
W1 = {(−α − β, β, α) : α, β ∈ R},
W2 = {(α, α, α) : α ∈ R},
respectivamente. Vamos encontrar, para cada espaço próprio, o maior número possível de vectores próprios L.I.,
ou seja, vamos encontrar uma base para cada espaço próprio. E o teorema anterior garante que se juntarmos todos
estes vectores próprios eles vão continuar sendo L.I.
Para W1 , temos que
(−α − β, β, α) = α(−1, 0, 1) + β(−1, 1, 0).
−
−
Assim, os vectores →
v = (−1, 0, 1) e →
v = (−1, 1, 0) geram W . Como além disso, eles são L.I. (um não é
1
2
1
múltiplo escalar do outro), então eles formam uma base para W1 . Assim, não podemos ter um número maior de
vectores próprios L.I. associados a λ1 = 0 (Teorema 4.6 na página 103).
−
Para W2 , temos que o conjunto {→
v 3 = (1, 1, 1)} é uma base para W2 , pois como
(α, α, α) = α(1, 1, 1),
→
−
v 3 gera W2 e um vector não nulo é L.I. Assim, não podemos ter um número maior de vectores próprios L.I.
associados a λ2 = 8 (Teorema 4.6 na página 103).
−
−
−
Como →
v1 e →
v 2 são vectores próprios L.I. associados a λ1 e →
v 3 é um vector próprio L.I. associado a λ2 ,
−
−
−
então pelo Teorema 6.3 na página 134 os vectores próprios juntos →
v 1, →
v2 e →
v 3 são L.I. Assim, a matriz A é
diagonalizável e as matrizes
λ1
0
0
2 0 0
−1 −1 1
h
i
−
−
−
D= 0
λ1
0 = 0 2 0 e P = →
v1 →
v2 →
v3 = 0
1 1
0
0
λ2
0 0 8
0
1 1
são tais que
D = P −1 AP.
Exemplo 6.6 Considere a matriz
A=
"
1
−4
−1
1
#
.
Já vimos no Exemplo 6.3 na página 131 que o seu polinómio característico é p(t) = det(A − tI2 ) = t2 − 2t − 3,
que os seus valores próprios são λ1 = 3 e λ2 = −1 e que os espaços próprios correspondentes são
W1 = {(α, −2α) : α ∈ R}
e
W2 = {(α, 2α) : α ∈ R},
respectivamente.
−
Para λ1 = 3, temos que {→
v 1 = (1, −2)} é uma base de W1 . Assim, não podemos ter mais vectores próprios
−
L.I. associados a λ1 . De forma análoga para λ2 = −1, {→
v 2 = (1, 2)} é um conjunto com o maior número possível
de vectores próprios L.I. associados a λ2 . Assim, a matriz A é diagonalizável e as matrizes
"
#
"
# "
#
h
i
1 1
λ1
0
3
0
−
−
P = →
e D=
=
,
v1 →
v2 =
−2 2
0
λ2
0 −1
são tais que
D = P −1 AP.
Exemplo 6.7 Considere a matriz
A=
"
0
0
1
0
#
.
O seu polinómio característico é p(t) = det(A − tI2 ) = t2 , assim A possui um único valor próprio: λ1 = 0.
Agora, vamos determinar os vectores próprios associados ao valor próprio λ1 = 0. Para isto vamos resolver o
→
−
−
sistema (A − λ1 I2 )→
v = 0 . Como
"
#
0 1
A − λ1 I2 = A =
,
0 0
então
é
Introdução à Álgebra Linear
→
−
−
(A − λ1 I2 )→
v = 0
"
0
0
1
0
#"
x
y
#
=
"
0
0
Opto, Qui Ind, Mat
#
2007/2008
136
Capítulo 6. Diagonalização
ou
(
y
0
=
=
0
0
cuja solução geral é
W1 = {(α, 0) : α ∈ R},
−
que é o espaço próprio correspondente a λ1 = 0. Assim, para λ1 = 0, temos que {→
v 1 = (1, 0)} é uma base de
−
→
W 1 . Portanto, não podemos ter mais vectores próprios L.I. associados a λ1 e como só temos um valor próprio não
podemos ter mais vectores próprios L.I. Portanto, pelo Teorema 6.2 na página 133, a matriz A não é diagonalizável,
ou seja, não existem matrizes P e D tais que D = P −1 AP .
Exercícios Numéricos
6.1.1 Ache o polinómio característico, os valores próprios e os vectores próprios de cada matriz:
(a)
"
(c)
(e)
1
1
0
0
0
2
0
0
#
1
1
1 2
0 3
0 0
−2
3
3 −2
−1
2
"
(b)
(d)
(f)
−1
4
1 0
−1 3
3 2
2
2
1
2
2 −2
1
2
#
0
0
−2
3
1
1
6.1.2 Ache bases para os espaços-próprios associados a cada valor próprio
(a)
(c)
2
3
0
1
0
0
0
0
0
3
3 4
3 2
3 3
0 2
0
−1
4
2
−1
0
0
(b)
6.1.3 Verifique quais das matrizes são diagonalizáveis:
(a)
"
1
1
1
(c) 4
1
4
−2
#
1
0
−1
(d)
(b)
−2
4
4
"
2
0
0
2
0
0
0
1
−2
1
(d) 0
0
0
0
2
3 4
3 2
1 1
0 1
3
1
0
2
2
0
0
0
1
2
−1
0
#
3
2
2
6.1.4 Ache para cada matriz A, se possível, uma matriz não-singular P tal que P −1 AP seja diagonal:
(a)
(c)
1
0
0
1
0
2
1
1
1
2
1
1
2
0
3
3
0
2
(b)
(d)
4
2 3
2
1 2
−1 −2 0
3 −2 1
0
2 0
0
0 0
Exercícios usando o Matlabr
>> syms x y z diz ao Matlabr que as variáveis x, y e z são simbólicas,
>> A=[a11,a12,...,a1n,a21,a22,..., ...,amn] cria uma matriz, m por n, usando os elementos a11, a12,
..., amn e a armazena numa variável A,
>> A=[A1,...,An] cria uma matriz A formada pelas matrizes, definidas anteriormente, A1, ..., An colocadas
uma ao lado da outra,
>> solve(expr) determina a solução da equação expr=0. Por exemplo,
>> solve(xˆ2-4) determina as soluções da equação x2 -4=0,
>> subs(expr,x,num) substitui na expressão expr a variável x por num.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
137
Capítulo 6. Diagonalização
>> [P,D]=eig(A) determina matrizes P e D (diagonal) tais que AP=PD.
>> inv(A) calcula a inversa da matriz A.
>> A=sym(A) converte a matriz A numa matriz em que os elementos são armazenados no formato simbólico.
A função numeric faz o processo inverso.
Comandos do Matlabr :
>> A=randi(n) ou >> A=randi(m,n) cria uma matriz n por n ou m por n, respectivamente, com elementos
inteiros aleatórios.
>> escalona(A) calcula passo a passo a forma reduzida escalonada da matriz A.
6.1.5 Defina as matrizes B=sym(randi(2)) e A=[B-B’,zeros(2,1),zeros(1,2),randi]. A matriz A é diagonalizável?
Por quê?
6.1.6 Defina as matrizes L=[eye(2),zeros(2,1),randi(1,2),0] e A=sym(L*L’). Determine o polinómio característico
de A, os valores próprios e um conjunto de vectores próprios linearmente independentes com o maior número
possível de vectores. Encontre matrizes P e D (diagonal) tais que inv(P)*A*P=D, se possível. Verifique o
resultado. Use o comando [P,D]=eig(A) e compare com as matrizes que você encontrou.
6.1.7 Defina a=randi,b=randi e A=sym([2*a,a-b,a-b,0,a+b,b-a,0,b-a,a+b]). Determine o polinómio característico
de A, os valores próprios e um conjunto de vectores próprios linearmente independentes com o maior número
possível de vectores. Encontre matrizes P e D (diagonal) tais que inv(P)*A*P=D, se possível. Verifique o
resultado. Use o comando [P,D]=eig(A) e compare com as matrizes que você encontrou.
6.1.8 Defina a=randi,b=randi e A=sym([a,0,b,2*b,a-b,2*b,b,0,a]). Determine o polinómio característico de A, os
valores próprios e um conjunto de vectores próprios linearmente independentes com o maior número possível
de vectores. Encontre matrizes P e D (diagonal) tais que inv(P)*A*P=D, se possível. Verifique o resultado. Use
o comando [P,D]=eig(A) e compare com as matrizes que você encontrou.
6.1.9 Use o Matlabr para resolver os Exercícios Numéricos
Exercícios Teóricos
6.1.10 Dizemos que uma matriz B, n × n, é semelhante a uma matriz A, n × n, se existir uma matriz P não singular
tal que B = P −1 AP . Demonstre:
(a) A é semelhante a A,
(b) Se A é semelhante a B, então B é semelhante a A,
(c) Se A é semelhante a B e B é semelhante a C, então A é semelhante a C.
6.1.11 Seja λ um valor próprio (fixo) de A. Demonstre que o conjunto formado por todos os vectores próprios de A
associados a λ, juntamente com o vector nulo, é um subespaço do Rn . Este subespaço é chamado de espaço
próprio associado a λ.
6.1.12 Demonstre que se A e B são semelhantes, então possuem os mesmos polinómios característicos e portanto os
mesmos valores próprios.
6.1.13 Demonstre que se A é uma matriz triangular superior, então os valores próprios de A são os elementos da
diagonal principal de A.
6.1.14 Demonstre que A e AT possuem os mesmos valores próprios. O que podemos dizer sobre os vectores próprios
de A e AT ?
−
6.1.15 Seja λ um valor próprio de A com vector próprio associado →
x . Demonstre que λk é um valor próprio de
−
Ak = A . . . A associado a →
x , em que k é um inteiro positivo.
6.1.16 Uma matriz A é chamada nilpotente se Ak = 0, para algum inteiro positivo k. Demonstre que se A é
nilpotente, então o único valor próprio de A é 0. (Sugestão: use o exercício anterior)
6.1.17 Seja A uma matriz n × n.
(a) Mostre que o determinante de A é o produto de todas as raízes do polinómio característico de A, (Sugestão:
p(t) = det(A − tIn ) = (−1)n (t − λ1 ) · · · (t − λn ).)
(b) Mostre que A é singular se, e somente se, 0 for um valor próprio de A.
−
6.1.18 Seja λ um valor próprio da matriz não-singular A com vector próprio associado →
x . Mostre que 1/λ é um
→
−
−1
valor próprio de A
com vector próprio associado x .
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
138
Capítulo 6. Diagonalização
6.1.19 Seja A =
"
a
c
b
d
#
. Ache as condições necessárias e suficientes para que A seja diagonalizável.
−
−
−
→
−
−
6.1.20 Se →
v e→
w são vectores próprios associados a um valor próprio λ, então →
w − proj→
v w é também um vector
−
−
próprio associado a λ? E se →
v e→
w forem vectores próprios associados a valores próprios diferentes?
6.1.21 Sejam A e B matrizes n × n. Mostre que AB e BA possuem os mesmos valores próprios. (Sugestão: Separe
−
−
em dois casos: λ = 0 e λ 6= 0. No segundo caso, mostre que se →
v é vector próprio de AB, então B →
v é vector
próprio de BA.)
6.1.22 Seja A uma matriz n × n diagonalizável. Mostre que o traço de A é igual a soma das raízes do seu polinómio
característico, incluindo as multiplicidades. (Sugestão: use o facto de que tr(AB) = tr(BA).)
6.1.23 Suponha que duas matrizes n × n, A e B, são tais que B = αA, para um escalar α 6= 0. Mostre que se λ é
valor próprio de uma matriz A, então αλ é valor próprio de B.
6.2
6.2.1
Diagonalização de Matrizes Simétricas
Motivação
O problema da identificação de uma cónica (curva no plano descrita por uma equação de 2o grau em x e y)
através da sua equação é facilmente resolvido se a equação não possui um termo em que aparece o produto xy. Mas,
ao contrário, se aparece este termo misto, temos que fazer uma mudança de coordenadas de forma que nas novas
coordenadas ele não apareça. Vejamos o exemplo seguinte.
Exemplo 6.8 Considere o problema de identificar uma cónica representada pela equação
3x2 + 2xy + 3y 2 = 4.
(6.2.13)
Usando matrizes, esta equação pode ser escrita como
ou
ou ainda,
h
3x + y
h
x
y
"
i
3
1
"
x
y
#
=4
#"
x
y
#
=4
i
x + 3y
1
3
→
−
−
x T A→
x = 4,
em que
A=
"
3
1
#
1
3
(6.2.14)
→
−
x =
e
"
x
y
#
.
Como veremos adiante (Exemplo 6.10 na página 141), podemos escrever
A = P DP T
em que
P =
"
√1
2
− √1
2
1
√
2
1
√
2
#
e
D=
"
2
0
0
4
#
.
Assim, a equação (6.2.14) pode ser escrita como
−
−
−
−
(→
x T P )D(P T →
x ) = (P T →
x )T D(P T →
x ) = 4.
−
−
Se fazemos a mudança de variáveis (ou de coordenadas) →
x = P→
x ′ , então como P T P = I2 , a equação (6.2.14)
se transforma em
→
−
−
x ′T D →
x′ = 4
ou
que pode ser reescrita como,
h
x′
y′
i
"
2
0
0
4
#"
x′
y′
#
=4
2x′2 + 4y ′2 = 4,
ou dividindo por 4, como
x′2
y ′2
+
=1
2
1
que é a equação da elipse mostrada na Figura 7.2. Veremos na próxima secção como traçar esta elipse.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
139
Capítulo 6. Diagonalização
A matriz P , tem a propriedade de que a sua inversa é simplesmente a sua transposta, P −1 = P T . Uma matriz
que satisfaz esta propriedade é chamada de matriz ortogonal. O que possibilitou a identificação da cónica, no
exemplo anterior, foi o facto de que a matriz A é diagonalizável através de uma matriz ortogonal P . Ou seja, existe
uma matriz P tal que A = P DP −1 e P −1 = P T .
Já vimos que nem toda matriz é diagonalizável (Exemplo 6.7 na página 135). Vamos ver que se uma matriz
A é simétrica, então ela é diagonalizável, isto é, existe uma matriz diagonal D e uma matriz invertível P tal que
D = P −1 AP . Além disso, para matrizes simétricas, existe uma matriz P tal que D = P T AP . Isto porque existe
uma matriz ortogonal P que faz a diagonalização, ou seja, que tem a propriedade P −1 = P T . Em algumas aplicações
a diagonalização com uma tal matriz é necessária, como por exemplo na identificação de cónicas.
Vamos em primeiro lugar, caracterizar as matrizes ortogonais.
6.2.2
Matrizes Ortogonais
Uma matriz P tal que P −1 = P T é chamada de matriz ortogonal.
Teorema 6.4 Uma matriz P é ortogonal se, e somente se, as suas colunas formam um conjunto ortonormal de
vectores.
Demonstração:
h
−
Vamos escrever P = →
u1
...
→
−
un
somente se, P T P = In . Mas,
→
−
uT
1
.
T
.
P P =
.
→
−
uT
n
h →
−
u1
i
−
−
. Ou seja, →
u 1, . . . , →
u n são as colunas de P . A inversa de P é P T se, e
...
→
−
un
→
−
→
−
uT
1 u1
→
−
→
T
i u2−
u1
=
..
.
→
−
→
−
uT
n u1
→
−
→
−
uT
1 u2
→
−
→
T
u −
u
2
2
..
.
→
−
→
−
uT
n u2
···
···
···
→
−
→
−
uT
1 un
→
−
→
−
T
u2 un
.
..
.
→
−
→
−
T
un un
−
→
−
→
− →
−
→
−T→
−
→
− →
−
Logo,
= In se, e somente se, →
uT
i u j = u i u j = 0 para i 6= j e u i u i = u i u i = 1 para i = 1, · · · , n.
−
−
Ou seja, P T P = In se, e somente se, →
u 1, . . . , →
u n são ortonormais.
PTP
Vamos supor que uma matriz A é diagonalizável através de uma matriz ortogonal, ou seja, que existe uma matriz
P tal que D = P T AP é uma matriz diagonal. Como a matriz P é uma matriz cujas colunas são vectores próprios de
A, deduzimos do teorema anterior que uma matriz A é diagonalizável através de uma matriz ortogonal se, e somente
se, ela possui um conjunto ortonormal de vectores próprios. Como veremos, as matrizes simétricas possuem esta
característica.
Teorema 6.5 Para uma matriz A simétrica, os vectores próprios associados a valores próprios diferentes são
ortogonais.
Demonstração:
−
−
Sejam →
v1 e →
v 2 vectores próprios de A associados aos valores próprios λ1 e λ2 , respectivamente, com λ1 6= λ2 .
→
−
−
−
−
Então, A v 1 = λ1 →
v 1 e A→
v 2 = λ2 →
v 2.
Agora, se escrevemos os vectores como matrizes colunas, o produto escalar é simplesmente o produto matricial
da transposta da primeira matriz pela segunda. Assim,
−
−
−
−
−
−
→
−
−
T→
T→
A→
v 1 →
v 2 = (A→
v 1 )T →
v2=→
vT
1 A v 2 = v 1 A v 2.
Como A é simétrica
AT
(6.2.15)
−
−
= A e como →
v1 e→
v 2 são vectores próprios de A, temos de (6.2.15) que
−
−
−
−
λ1 →
v 1 →
v 2 = λ2 →
v 1 →
v2
ou
−
−
(λ1 − λ2 )→
v 1 →
v 2 = 0.
→
−
→
−
→
−
−
Como λ1 =
6 λ2 , concluímos que v 1 v 2 = 0, ou seja, v 1 , →
v 2 são ortogonais.
Como vectores próprios associados a valores próprios diferentes já são ortogonais, para diagonalizarmos uma
matriz simétrica A através de uma matriz P ortogonal, precisamos encontrar, para cada valor próprio, vectores
próprios ortonormais associados a eles. Para isso, podemos aplicar o processo de ortogonalização de Gram-Schmidt
a cada conjunto de vectores próprios L.I. associados a cada um dos valores próprios.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
140
Capítulo 6. Diagonalização
Exemplo 6.9 Considere a matriz
4
A= 2
2
2
4
2
2
2 .
4
Esta é a matriz do Exemplo 6.5 na página 135. Para esta matriz o polinómio característico é
p(t) = det(A − tI3 ) = (t − 2)2 (8 − t).
Portanto os valores próprios de A (raízes reais do polinómio
Os vectores próprios associados aos valores próprios λ1 = 2
→
−
−
(A − λ2 I3 )→
v = 0 , respectivamente.
A forma escalonada reduzida de
2 2
A − 2I3 = 2 2
2 2
é
1
0
0
característico) são λ1 = 2 e λ2 = 8.
→
−
−
e λ2 = 8 são as soluções de (A − λ1 I3 )→
v = 0 e
1
0 .
0
1
0
0
Portanto, o espaço próprio associado a λ1 = 2 é
2
2
2
W1 = {(−α − β, β, α) : α, β ∈ R}.
−
−
Agora, (−α − β, β, α) = α(−1, 0, 1) + β(−1, 1, 0). Assim, os vectores →
v 1 = (−1, 0, 1) e →
v 2 = (−1, 1, 0) geram
W1 . Como além disso, eles são L.I. (um não é múltiplo escalar do outro), então eles formam uma base para W1 .
Para encontrar dois vectores próprios ortonormais associados a λ1 = 2 vamos aplicar o processo de ortogonal−
−
ização de Gram-Schmidt aos vectores →
v1 e→
v 2.
é
1
1
→
−
−
→
−
−
→
−
−
w1 = →
v 1 = (−1, 0, 1),
w2 = →
v 2 − proj→
w 1 v 2 = (− , 1, − )
2
2
1
1
1
→
−
→
−
u1 =
w 1 = (− √ , 0, √ )
−
k→
w 1k
2
2
1
2
1
1
→
−
→
−
u2 =
w 2 = (− √ , √ , − √ ).
−
k→
w 2k
6
6
6
Com relação ao valor próprio λ2 = 8, temos que a forma escalonada reduzida da matriz
−4
2
2
A − 8I3 = 2 −4
2
2
2 −4
1
0
0
0
1
0
Assim, o espaço próprio associado a λ2 = 8 é
−1
−1 .
0
W2 = {(α, α, α) : α ∈ R}.
−
−
O conjunto {→
v 3 = (1, 1, 1)} é uma base para W2 , pois como (α, α, α) = α(1, 1, 1), →
v 3 gera W2 e um vector não
nulo é L.I. Assim, o vector
1
1
1
1
→
−
→
−
u3 =
v 3 = (√ , √ , √ )
−
k→
v 3k
3
3
3
forma uma base ortonormal para W2 .
Como a matriz A é simétrica, vectores próprios associados a valores próprios diferentes são ortogonais. Por−
−
−
tanto, →
u 1, →
u2 e →
u 3 são ortonormais e assim a matriz
√1
− √1
− √1
2
6
3
h
i
−
−
−
√2
√1
0
P = →
u1 →
u2 →
u3 =
6
3
√1
√1
− √1
2
satisfaz D =
P T AP ,
em que
2
D= 0
0
Introdução à Álgebra Linear
0
2
0
6
3
0
0 .
8
Opto, Qui Ind, Mat
2007/2008
141
Capítulo 6. Diagonalização
Exemplo 6.10 Considere a matriz
A=
"
3
1
1
3
#
.
O seu polinómio característico é
p(t) = det(A − tI2 ) = t2 − 6t + 8 = (t − 2)(t − 4).
Portanto os valores próprios de A são λ1 = 2 e λ2 = 4. Os vectores próprios associados aos valores próprios λ1 = 2
→
−
→
−
−
−
e λ2 = 4 são as soluções de (A − λ1 I2 )→
v = 0 e (A − λ2 I2 )→
v = 0 , respectivamente.
→
−
−
A solução geral do sistema (A − 2I2 )→
x = 0 é o espaço próprio
W1 = {(α, −α) : α ∈ R}.
−
−
Como (α, −α) = α(1, −1), então →
v 1 = (1, −1) gera W1 e como um vector não nulo é L.I., {→
v 1 } é uma base de
W1 . Assim,
1
1
1
→
−
→
−
u1 =
v 1 = √ ,−√
→
−
k v 1k
2
2
é uma base ortonormal de W1 .
→
−
−
A solução geral do sistema (A − 4I2 )→
v = 0 é o espaço próprio
W2 = {(α, α) : α ∈ R}.
−
−
Como (α, α) = α(1, 1), então →
v 2 = (1, 1) gera W2 e como um vector não nulo é L.I., {→
v 2 } é uma base de W2 .
Assim,
1
1
1
→
−
→
−
v2= √ ,√
u2 =
→
−
k v 2k
2
2
é uma base ortonormal de W2 .
Como a matriz A é simétrica, vectores próprios associados a valores próprios diferentes são ortogonais.
Portanto,
"
#
"
#
1
√1
√
2 0
2
2
P =
e
D
=
,
1
√
− √1
0 4
2
2
são tais que D = P T AP .
O próximo resultado, que não será demonstrado no momento (Apêndice IV, na página 142), garante que o procedimento seguido nos dois exemplos anteriores sempre funciona, ou seja, que toda matriz simétrica é diagonalizável
através de uma matriz ortogonal.
Teorema 6.6 Se A é uma matriz simétrica, então existe uma matriz P ortogonal e uma matriz diagonal D tal que
D = P T AP.
Assim, se A é simétrica, então ela é diagonalizável.
Exercícios Numéricos
6.2.1 Diagonalize cada matriz dada A por meio de uma matriz ortogonal, ou seja, ache uma matriz ortogonal P tal
que P T AP seja diagonal:
(a)
"
(c)
(e)
(g)
2
2
0
0
1
1
1
0
1
2
0
0
2
2
0
0
0
1
1
0
2
1
0
0
#
(b)
1
0
0
0
0
1
0
0
1
2
(d)
"
0
0
2
1
Introdução à Álgebra Linear
(f)
(h)
2
1
0
0
0
2
1
1
0
0
0
0
Opto, Qui Ind, Mat
1
2
0
2
2
1
2
1
0
0
0
0
#
0
2
2
1
1
2
0
0
0
1
0
0
1
0
2007/2008
142
Capítulo 6. Diagonalização
Exercícios Teóricos
6.2.2 Mostre que se A é uma matriz ortogonal, então det(A) = ±1.
6.2.3 Mostre que se A e B são matrizes ortogonais, então AB é ortogonal.
"
#
cos θ − sin θ
6.2.4 (a) Verifique se a matriz
é ortogonal,
sin θ
cos θ
→
−
−
−
−
−
−
(b) Mostre que →
x = (x, y) é ortogonal a →
v = (a, b) 6= 0 com k→
x k = k→
v k se, e somente se, →
x = (−b, a) ou
→
−
x = (b, −a).
(c) Mostre que se A é uma matriz ortogonal 2 × 2, então existe um número real θ tal que
"
#
"
#
cos θ − sin θ
cos θ
sin θ
A=
ou A =
.
sin θ
cos θ
sin θ − cos θ
A primeira matriz tem determinante igual a 1 e é chamada matriz de rotação. (Sugestão: Comece com
uma matriz (aij )2×2 e use o facto de que as colunas são ortonormais. Uma das equações será a211 +a221 = 1.
Faça a11 = cos θ e a21 = sin θ. Use o item anterior.)
6.2.5 Mostre que se uma matriz A é diagonalizável por uma matriz ortogonal (isto é, existem P e D, com P −1 = P T
e D diagonal, tais que D = P T AP ), então A é uma matriz simétrica.
→
−
−
−
−
−
6.2.6 Dizemos que uma matriz simétrica A, n × n, é (definida) positiva se →
x T A→
x > 0, para todo →
x ∈ Rn , →
x 6= 0 ,
→
−
x escrito como matriz coluna. Mostre que são equivalentes as seguintes afirmações:
(a) A matriz A é definida positiva.
(b) A é simétrica e todos os valores próprios de A são positivos.
(c) Existe uma matriz definida positiva B tal que A = B 2 . A matriz B é chamada a raiz quadrada de A.
(Sugestão: Mostre que (a)⇒(b)⇒(c)⇒(a). Na parte (b)⇒(c) faça primeiro o caso em que A é uma matriz
diagonal)
6.2.7 Seja A uma matriz invertível n × n. Mostre que existe uma matriz simétrica definida positiva P e uma matriz
ortogonal U , tal que A = P U . Esta decomposição é única chamada de decomposição polar de A. (Sugestão:
1
Sejam P = (AAT ) 2 e U = P −1 A. Mostre que U U T = In .)
6.2.8 Seja A uma matriz n × n. Para k = 1, · · · , n, seja Ak a submatriz obtida de A eliminando-se as últimas n − k
linhas e colunas. Ak é chamada submatriz principal de A de ordem k. Mostre que se A é uma matriz
simétrica definida positiva n × n, então
(a) A é não singular,
(b) det(A) > 0,
−
(c) as submatrizes principais A1 , · · · , An são todas definidas positivas. (Sugestão: considere vectores →
x k tais
que os últimos n − k elementos são nulos.)
Apêndice IV: Valores Próprios Complexos
Vamos provar que toda matriz simétrica é diagonalizável através de uma matriz ortogonal. Para isto, precisamos
trabalhar com matrizes cujas entradas são números complexos. Vamos chamar o conjunto das matrizes m × n cujas
entradas são números complexos de Mmn (C).
Para uma matriz A = (aij ) ∈ Mmn (C), definimos o conjugado da matriz A, denotado por A como sendo a matriz
B = (bij ) ∈ Mmn (C) dada por bij = aij , em que, se aij = αij + iβij , então aij = αij − iβij .
Para as matrizes de Mmn (C) além das propriedades que já foram demonstradas no Teorema 1.1 na página 3 são
válidas as seguintes propriedades, cuja demonstração deixamos a cargo do leitor:
(p) Se A ∈ Mmp (C) e B ∈ Mpn (C), então
(q) Se A ∈ Mmn (C) e α ∈ C, então
AB = A B.
αA = α B.
−
Teorema 6.7 Seja A uma matriz n × n com entradas reais. Se →
z ∈ Mn1 (C), é um vector próprio de A associado
−
−
−
a um valor próprio complexo λ = α + iβ com β 6= 0, ou seja, se A→
z = λ→
z , então →
z também é um vector próprio
de A associado a λ = α − iβ.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
143
Capítulo 6. Diagonalização
Demonstração:
−
−
−
−
−
A→
z =A→
z = (A→
z ) = λ→
z =λ→
z.
Teorema 6.8 Toda matriz simétrica, cujas entradas são números reais, possui valor próprio real.
Demonstração:
Seja A uma matriz simétrica, cujas entradas são números reais. Vamos mostrar que as raízes do seu polinómio
→
−
−
característico são reais. Seja λ uma raiz do polinómio característico de A. Então o sistema linear (A − λIn )→
z = 0
→
−
tem solução não trivial z ∈ 2Mn1 (C). O que implica que
−
−
A→
z = λ→
z.
−
−
Como A é uma matriz cujas entradas são números reais, pelo Teorema 6.7 temos que A→
z = λ→
z . Por um lado,
T −
T −
T−
→
−
−
−
z A→
z =→
z λ→
z = λ→
z →
z =λ
n
X
i=1
Por outro lado
|zi |2 .
T −
T
T−
→
−
−
−
−
−
−
z A→
z =→
z AT →
z = (A→
z )T →
z = λ→
z →
z =λ
n
X
i=1
Logo, λ = λ, ou seja, λ é um número real.
|zi |2 .
Demonstração do Teorema 6.6 na página 141. O resultado é obvio se n = 1. Vamos supor que o resultado seja
verdadeiro para matrizes (n − 1) × (n − 1) e vamos provar que ele é verdadeiro para matrizes n × n. Pelo Teorema
−
6.8 a matriz A tem um valor próprio λ1 . Isto significa que existe vectores próprios associados a λ1 . Seja →
v 1 um
→
−
→
−
→
−
→
−
vector próprio de norma igual a 1 associado a λ1 . Sejam v 2 , · · · , v n vectores tais que { v 1 , · · · , v n } é uma base
ortonormal do Rn (isto pode ser conseguido aplicando-se o processo de ortogonalização de Gram-Schmidt a uma
→
−
base do Rn que
h contenha v 1 .) i
−
−
−
−
−
−
−
−
Seja P1 = →
v 1 = λ1 →
v 1 e A→
v 2 , · · · , A→
v n são combinações lineares de →
v 1, · · · , →
v n,
v 1 ··· →
v n . Como A→
temos que
i h
i
h
−
−
−
−
AP1 = A→
(6.2.16)
v 1 ··· →
v n M = P1 M,
v 1 · · · A→
vn = →
λ1 ∗ · · · ∗
0
. Multiplicando à esquerda (6.2.16) por P T obtemos M = P T AP1 . Mas,
em que M =
1
1
..
.
B
0
M T = (P1T AP1 )T = P1T AT P1 = P1T AP1 = M , ou seja, a matriz M é simétrica. Portanto,
λ1 0 · · · 0
0
,
M =
..
.
B
0
com B uma matriz simétrica (n − 1) × (n − 1). Como estamos supondo o resultado verdadeiro para matrizes
(n − 1) × (n − 1), então existe uma matriz ortogonal Pe2 , (n − 1) × (n − 1), tal que D2 = Pe2T B Pe2 é diagonal. Sejam
λ1 0 · · · 0
0
e P = P1 P2 . P é ortogonal (verifique!) e pela equação (6.2.16)
P2 =
..
e
.
P2
0
λ1
0
AP = (AP1 )P2 = P1 M P2 = P1
..
.
0
Mas, B Pe2 = Pe2 D2 e assim,
Introdução à Álgebra Linear
λ1
0
AP = P1 P2
..
.
0
0
···
D2
0
···
B Pe2
0
0
.
= P D,
Opto, Qui Ind, Mat
2007/2008
144
Capítulo 6. Diagonalização
em que D =
6.3
λ1
0
..
.
0
0
···
0
D2
. Multiplicando à esquerda por P T obtemos o resultado.
Aplicação na Identificação de Cónicas
Uma equação quadrática nas variáveis x e y tem a forma
ax2 + bxy + cy 2 + dx + ey + f = 0,
em que a, b, c, d, e e f são números reais, com a, b e c não simultaneamente nulos. Esta equação representa uma
(secção) cónica, por poder ser obtida da intersecção de um cone circular com um plano. As cónicas mais importantes
são as elipses, as hipérboles e as parábolas, que são chamadas de cónicas não degeneradas. As outras que incluem
um único ponto, um par de rectas, são chamadas cónicas degeneradas.
Dizemos que a equação de uma cónica não degenerada está na forma padrão se ela tem uma das formas dadas
na Figura 6.3 na página 147.
Nesta secção veremos como a diagonalização de matrizes simétricas pode ser usada na identificação das cónicas
cujas equações não estão na forma padrão.
Vamos estudar alguns exemplos.
Exemplo 6.11 Considere a cónica C cuja equação é
5x2 − 4xy + 8y 2 − 36 = 0.
Esta equação pode ser escrita como
→
−
−
x T A→
x − 36 = 0,
em que
A=
"
5
−2
"
5−λ
−2
O polinómio característico de A é
p(λ) = det(A − λI2 ) = det
−2
8
(6.3.17)
#
.
−2
8−λ
#
= λ2 − 13λ + 36.
Logo, os valores próprios de A são λ1 = 4 e λ2 = 9. Os vectores próprios associados a λ1 = 4 são as soluções
não nulas do sistema
→
−
−
(A − 4I2 )→
v = 0
ou
"
cuja solução é
1
−2
−2
4
#"
x
y
#
=
"
0
0
#
,
W1 = {(2α, α) : α ∈ R}.
→
−
v1
−
−
Assim, →
v 1 = (2, 1) é uma base para W1 , pois gera W1 e é L.I. E →
u 1 = k→
= ( √2 ,
−
v 1k
5
para W1 .
Os vectores próprios associados a λ2 = 9 são as soluções não nulas do sistema
√1 )
5
é uma base ortonormal
→
−
−
(A − 9I2 )→
v = 0
ou
"
cuja solução é
−4
−2
−2
−1
#"
x
y
#
=
"
0
0
#
,
W2 = {(−α, 2α) : α ∈ R}.
→
−
−
Assim, v 2 = (−1, 2) é uma base para W2 , pois gera W2 e é L.I. E →
u2 =
ortonormal para W2 . Portanto,
D = P T AP
em que,
D=
"
Introdução à Álgebra Linear
4
0
0
9
#
e
P =
h
→
−
u1
→
−
u2
i
Opto, Qui Ind, Mat
=
"
√2
5
√1
5
→
−
v2
−
k→
v 2k
−1
√
5
√2
5
#
= (− √1 ,
5
√2 )
5
é uma base
.
2007/2008
145
Capítulo 6. Diagonalização
−
−
−
Vamos fazer a mudança de variáveis →
x = P→
x ′ , em que →
x′ =
−
−
Substituindo →
x = P→
x ′ na equação (6.3.17), obtemos
"
#
x′
y′
na equação (6.3.17).
→
−
−
x ′T (P T AP )→
x ′ − 36 = 0,
ou
→
−
−
x ′T D →
x ′ − 36 = 0,
ou
4x′2 + 9y ′2 − 36 = 0,
ou ainda
x′2
y ′2
+
= 1,
9
4
(6.3.18)
que é a equação de uma elipse cujo esboço é mostrado na Figura 6.1. Para fazer o esboço do gráfico, em primeiro
lugar temos que traçar os eixos
x#′ e y ′ . O eixo x′ passa pela origem, é paralelo e possui o mesmo sentido
"
"
# do vector
1
1
→
−
→
−
u 1 , que tem coordenadas
em relação ao sistema de coordenadas x′ y ′ . Assim, u 1 = P
, que é a
0
0
−
′
primeira
sentido de →
u 2 que tem coordenadas
"
# coluna de P . O eixo y passa pela origem, é paralelo e possui
" o mesmo
#
0
0
→
−
′
′
em relação ao sistema de coordenadas x y . Assim, u 2 = P
, que é a segunda coluna de P . Depois, a
1
1
partir da equação (6.3.18), verificamos na Figura 7.3 na página 456 a forma da curva em relação aos eixos x′ e y ′ .
′
y
y
′
x
x
Figura 6.1:
Elipse do Exemplo 6.11.
Exemplo 6.12 Considere a cónica cuja equação é dada por
80
20
5x2 − 4xy + 8y 2 + √ x − √ y + 4 = 0.
5
5
Esta equação pode ser escrita como
→
−
−
−
x T A→
x + K→
x + 4 = 0,
em que
A=
"
5
−2
−2
8
#
e
(6.3.19)
h
20
√
5
→
−
u2
i
K=
80
−√
5
A matriz A é a mesma do exemplo anterior. Assim, temos que
i
.
D = P T AP
em que,
D=
"
4
0
0
9
#
,
e
P =
h
→
−
u1
−
−
−
Vamos fazer a mudança de variáveis →
x = P→
x ′ , em que →
x′ =
(6.3.19), obtemos
ou
=
"
"
x′
y′
√2
5
√1
5
#
−1
√
5
√2
5
#
.
−
−
. Substituindo →
x = P→
x ′ na equação
→
−
−
−
x ′T (P T AP )→
x ′ + KP →
x′+4=0
→
−
−
−
x ′T D →
x ′ + KP →
x ′ + 4 = 0,
ou
4x′2 + 9y ′2 − 8x′ − 36y ′ + 4 = 0,
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
146
Capítulo 6. Diagonalização
ou ainda,
4(x′2 − 2x′ ) + 9(y ′2 − 4y ′ ) + 4 = 0.
Completando os quadrados, obtemos
4[(x′2 − 2x′ + 1) − 1] + 9[(y ′2 − 4y ′ + 4) − 4] + 4 = 0
ou
4(x′ − 1)2 + 9(y ′ − 2)2 − 36 = 0.
Fazendo mais uma mudança de variáveis
x′′ = x′ − 1
(6.3.20)
y ′′ = y ′ − 2,
(6.3.21)
e
obtemos
4x′′2 + 9y ′′2 − 36 = 0
ou
x′′2
y ′′2
+
=1
9
4
(6.3.22)
que é a equação de uma elipse cujo esboço é mostrado na Figura 6.2. Para fazer o esboço do gráfico, em primeiro
lugar temos que traçar os eixos "
x′′ e #y ′′ , que por sua vez são translações dos eixos x′ e y ′ . O eixo x′ tem a direcção
1
−
e o sentido do vector →
u1 = P
(a primeira coluna de P ). O eixo y ′ tem a direcção e o sentido do vector
0
"
#
0
→
−
u2 = P
(a segunda coluna de P ). O eixo x′′ tem equação y ′′ = 0. Usando a equação (6.3.20) obtemos
1
y ′ = 2. O eixo y ′′ tem equação x′′ = 0. Usando a equação (6.3.21) obtemos x′ = 1. Depois, a partir da equação
(6.3.22), verificamos na Figura 7.3 na página 456 a forma da curva em relação aos eixos x′′ e y ′′ .
′′
y
y
′′
x
′
y
2
′
x
1
x
Figura 6.2:
Elipse do Exemplo 6.12.
Os exemplos anteriores são casos particulares do próximo teorema, cuja demonstração é feita da mesma forma
que fizemos com os exemplos e por isso deixamos para o leitor a tarefa de escrevê-la.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
147
Capítulo 6. Diagonalização
x2 = 4py, p > 0
y 2 = 4px, p > 0
Parábola
y
x = −p
y
b
b
b
x
b
x
y = −p
y2
x2
− 2 =1
2
a
b
Hipérbole
y
y
=
y
= b
a x
=
b x
− a
y
y
a x
− b
y
b
= a
b x
x2
y2
− 2 =1
2
a
b
b
x
b
x
b
x2
y2
+ 2 = 1, a > b
2
a
b
y2
x2
+ 2 = 1, a > b
2
a
b
Elipse
y
y
b
b
b
bb
bb
b
x
b
x
b
b
b
Figura 6.3:
Cónicas não degeneradas.
Teorema 6.9 Considere a equação
ax2 + bxy + cy 2 + dx + ey + f = 0,
(6.3.23)
com a, b, c, d, e, f ∈ R, sendo a, b e c não simultaneamente nulos. Então existe um sistema de coordenadas ortogonal
x′ y ′ , em que a equação (6.3.23) tem a forma
λ1 x′2 + λ2 y ′2 + d′ x′ + e′ y ′ + f = 0,
em que λ1 , λ2 são os valores próprios de
A=
Mais ainda,
−
em que →
x′ =
"
x′
y′
#
−
,→
x =
"
x
y
Introdução à Álgebra Linear
#
"
a
b/2
b/2
c
#
.
→
−
−
x = P→
x ′,
e P é uma matriz ortogonal (P −1 = P T ).
Opto, Qui Ind, Mat
2007/2008
148
Capítulo 6. Diagonalização
Exercícios Numéricos
Identificar a cónica, achar a equação no último sistema de coordenadas utilizado e fazer um esboço do gráfico.
6.3.1 9x2 − 4xy + 6y 2 = 30,
6.3.2 3x2 − 8xy − 12y 2 + 81 = 0,
6.3.3 2x2 − 4xy − y 2 = −24,
6.3.4 21x2 + 6xy + 13y 2 − 132 = 0,
6.3.5 4x2 − 20xy + 25y 2 − 15x − 6y = 0,
√
√
6.3.6 9x2 + y 2 + 6xy − 10 10x + 10 10y + 90 = 0,
√
√
6.3.7 5x2 + 5y 2 − 6xy − 30 2x + 18 2y + 82 = 0,
√
6.3.8 5x2 + 12xy − 12 13x = 36,
√
√
6.3.9 6x2 + 9y 2 − 4xy − 4 5x − 18 5y = 5,
√
6.3.10 x2 − y 2 + 2 3xy + 6x = 0,
√
√
6.3.11 8x2 + 8y 2 − 16xy + 33 2x − 31 2y + 70 = 0,
6.3.12 x2 − 6xy − 7y 2 + 10x + 2y + 9 = 0,
Exercícios usando o Matlabr
Comandos do pacote GAAL:
>> [P,D]=diagonal(A) diagonaliza a matriz A, de forma que AP=PD, em que D é uma matriz diagonal e P é
uma matriz ortogonal.
>> subst(expr,[x,y],[a,b]) substitui na expressão expr as variáveis x,y por a,b, respectivamente.
>> elipse(a,b) desenha a elipse
x2
a2
+
y2
b2
>> elipse(a,b,[U1 U2]) desenha a elipse
ortonormal U1 e U2.
= 1.
x′2
a2
+
y ′2
b2
= 1, em que x′ e y ′ são as coordenadas em relação à base
′′2
′′2
>> elipse(a,b,[U1 U2],X0) desenha a elipse xa2 + yb2 = 1, em que x′′ e y ′′ são as coordenadas em relação
ao sistema de coordenadas determinado pela base ortonormal U1 e U2 e pelo ponto X0.
>> hiperbx(a,b) desenha a hipérbole
x2
a2
−
y2
b2
>> hiperbx(a,b,[U1 U2]) desenha a hipérbole
à base ortonormal U1 e U2.
= 1.
x′2
a2
−
y ′2
b2
′′2
= 1, em que x′ e y ′ são as coordenadas em relação
′′2
>> hiperbx(a,b,[U1 U2],X0) desenha a hipérbole xa2 − yb2 = 1, em que x′′ e y ′′ são as coordenadas em
relação ao sistema de coordenadas determinado pela base ortonormal U1 e U2 e pelo ponto X0.
>> hiperby(a,b) desenha a hipérbole
y2
a2
−
x2
b2
>> hiperby(a,b,[U1 U2]) desenha a hipérbole
à base ortonormal U1 e U2.
= 1.
y ′2
a2
−
x′2
b2
′′2
= 1, em que x′ e y ′ são as coordenadas em relação
′′2
>> hiperby(a,b,[U1 U2],X0) desenha a hipérbole ya2 − xb2 = 1, em que x′′ e y ′′ são as coordenadas em
relação ao sistema de coordenadas determinado pela base ortonormal U1 e U2 e pelo ponto X0.
>> parabx(p) desenha a parábola y 2 = 4px.
>> parabx(p,[U1 U2]) desenha a parábola y ′2 = 4px′ , em que x′ e y ′ são as coordenadas em relação à base
ortonormal U1 e U2.
>> parabx(p,[U1 U2],X0) desenha a parábola y ′′ = 4px′′ , em que x′′ e y ′′ são as coordenadas em relação ao
sistema de coordenadas determinado pela base ortonormal U1 e U2 e por X0.
>> paraby(p) desenha a parábola x2 = 4py.
>> paraby(p,[U1 U2]) desenha a parábola x′2 = 4py ′ , em que x′ e y ′ são as coordenadas em relação à base
ortonormal U1 e U2.
>> paraby(p,[U1 U2],X0) desenha a parábola x′′2 = 4py ′′ , em que x′′ e y ′′ são as coordenadas em relação ao
sistema de coordenadas determinado pela base ortonormal U1 e U2 e por X0.
6.3.13 Use o Matlabr para resolver os Exercícios Numéricos.
Exercícios Teóricos
6.3.14 Demonstre o Teorema 6.9 na página 147.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008
149
Capítulo 6. Diagonalização
6.3.15 Seja C o conjunto dos pontos do plano que satisfazem a equação
Consideremos a matriz A =
"
a
b/2
ax2 + bxy + cy 2 + dx + ey + f = 0.
#
b/2
. Sejam λ e µ os valores próprios de A.
c
(a) Mostre que λµ = ac − b2 /4.
(b) Mostre que se λµ > 0, então C é uma elipse, um ponto ou o conjunto vazio.
(c) Mostre que se λµ < 0, então C é uma hipérbole, ou um par de rectas concorrentes.
(d) Mostre que se λµ = 0, então temos duas possibilidades:
i. Se λ 6= 0 ou µ 6= 0, então C é uma parábola, um par de rectas paralelas, uma recta ou o conjunto
vazio.
ii. Se λ = µ = 0, então C é uma recta. Observe que neste caso C não é uma cónica (Por quê?).
Teste do Capítulo
1. (a) Encontre matrizes P e D tais que
D = P T AP,
em que
A=
"
8
−8
−8
8
#
.
(b) Identificar a cónica, achar a equação no último sistema de coordenadas utilizado e fazer um esboço do
gráfico.
√
√
8x2 + 8y 2 − 16xy + 33 2x − 31 2y + 70 = 0.
Verifique quais das matrizes seguintes são diagonalizáveis:
"
#
a b
(a)
3b c
"
#
a −b
(b)
b
a
"
#
1
0
2. (a) Seja D =
. Calcule D 10 .
0 −1
(b) Sabendo-se que A = P −1 DP , calcule A10 .
3. Diga se é verdadeiro ou falso cada item abaixo, justificando.
(a) Se A é uma matriz 2 × 2 com somente 1 valor próprio, então A não é diagonalizável.
−
−
−
→
−
−
(b) Se →
v e→
w são vectores próprios associados a um valor próprio λ, então →
w − proj→
v w é também um vector
próprio associado a λ.
(c) Se A não é singular, então 0 não é valor próprio de A.
(d) As matrizes A e A2 possuem os mesmos vectores próprios.
Introdução à Álgebra Linear
Opto, Qui Ind, Mat
2007/2008



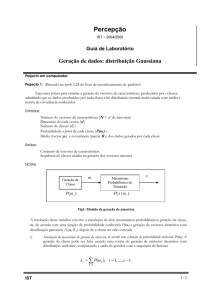


![Optimização e Algoritmos [ ] [ ] [ ]](http://s1.studylibpt.com/store/data/001510523_1-7ec9887c49177809832d9f101dee6257-300x300.png)