Automatismo de Regulação de Tensão em Unidade Remota
de Teleacção
Mário Ferreira Vieira
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente:
Orientador:
Vogais:
Prof. Paulo José da Costa Branco
Prof. Pedro Alexandre Flores Correia
Prof. José Manuel Dias Ferreira de Jesus
Eng. João António da Silva Pissarro
Maio de 2010
Automatismo de Regulação de Tensão em Unidade Remota de Teleacção
Mário Ferreira Vieira
Agradecimentos
Este trabalho representa o culminar de vários anos de estudo, dedicação e empenho na
concretização de um objectivo pessoal, pelo que, gostaria de agradecer a todas as pessoas que,
directa ou indirectamente, contribuíram para este trabalho.
Começo por agradecer ao coordenador de curso Prof. Leonel Sousa, pela disponibilidade e
facilidade demonstradas na resolução de problemas. Ao Prof. Pedro Flores, agradeço a oportunidade
de realização desta tese, ajuda e conselhos práticos dados durante a sua execução.
Um agradecimento especial à empresa Siemens, nomeadamente ao grupo em que estive
inserido, pelo apoio prestado e facilidade de integração que permitiram a realização deste trabalho
nas melhores condições: ao Eng.º João Festas, pela ajuda no primeiro contacto com a empresa, ao
Eng.º João Pissarro pelo seu acompanhamento no desenrolar do trabalho e ainda aos Eng.º Luís
Santos, Joel Lopes e Jorge Peniche, pelas dúvidas esclarecidas sobre as Unidades de Automação.
À minha família e amigos agradeço por tudo aquilo de bom que representam, pela força,
motivação e acima de tudo por acreditarem!
i
Resumo
A tensão é uma grandeza de carácter local cuja regulação é efectuada ao longo de todo o
sistema eléctrico, através de diferentes técnicas de acordo com o ponto da rede em questão.
Ao nível do transporte e distribuição são frequentemente utilizados transformadores de
potência com regulação em carga que compensam variações de tensão que ocorrem ao longo da
rede, alterando a relação de transformação por meio de um comutador instalado num dos
enrolamentos – geralmente o de tensão mais elevada, ao qual corresponde a menor intensidade de
corrente.
Os comutadores de tomadas são controlados pela função de “Regulação Automática de
Tensão” que emite ordens baseadas na leitura das grandezas eléctricas aos terminais do
transformador, permitindo assim a colocação em serviço da tomada mais adequada em cada
instante.
O presente trabalho é referente ao desenvolvimento da função de “Regulação Automática de
Tensão” num autómato da empresa Siemens, considerando os diversos factores que optimizam o seu
resultado. Desde logo, a possibilidade de regulação de 5 transformadores em paralelo; a minimização
das correntes de circulação que surgem neste tipo de exploração; a compensação da queda de
tensão nas linhas ligadas ao barramento e, finalmente, a coordenação com o accionamento de
baterias de condensadores.
Palavras-chave: Tensão, Transformadores de Potência, Comutadores de Tomadas, Regulação
Automática de Tensão.
ii
Abstract
Voltage is a local character greatness whose regulation is performed along all the system using
different techniques according to the network point.
In the transportation and distribution are often used power transformers with tap changers,
compensating voltage variations that occur throughout the system by changing the ratio of
transformation with a switch installed in the windings - usually the higher voltage, corresponding to the
lowest current intensity.
Tap switches are controlled by the function "Automatic Voltage Regulation" that create orders to
the motor that controls the tap position, acording to the reading values on the terminals of the
transformer, and thereby placing the correct tap in service.
This work is about the development of the function of "Automatic Voltage Regulation" in the
Siemens automation unit, considering all the factors that optimize the output. Like the possibility of
regulation 5 transformers in parallel, minimize the reactive currents that arise in this type of structure,
consider the voltage drop in the lines connected to the bus and coordination with the function of
capacitor batteries.
Keywords: Voltage, Power Transformers, Tap changer, Automatic Voltage Regulator.
iii
Índice
Agradecimentos ............................................................................................................................ i
Resumo ......................................................................................................................................... ii
Abstract ....................................................................................................................................... iii
Índice ............................................................................................................................................ iv
Lista de Figuras .......................................................................................................................... vi
Lista de Tabelas ......................................................................................................................... vii
Lista de Abreviações .................................................................................................................. ix
1. Introdução ............................................................................................................................... 1
1.1
Enquadramento ........................................................................................................................... 1
1.2
Objectivos .................................................................................................................................... 1
1.3
Estrutura da Dissertação.............................................................................................................. 2
2. Estado de arte – Regulação de Tensão ................................................................................ 3
2.1
Regulação de tensão nos Sistemas de Energia Eléctrica ............................................................ 3
2.2
Transformadores com comutação de tomadas ............................................................................ 4
2.3
Função de “Regulação Automática de Tensão” ........................................................................... 6
2.3.1 Regimes de funcionamento .................................................................................................... 7
2.3.2 Configuração da subestação .................................................................................................. 7
2.3.3 Comando de transformadores em paralelo ............................................................................ 9
2.3.4 Compensação da queda de tensão na linha ........................................................................ 14
2.3.5 Comando de baterias de condensadores ............................................................................. 16
2.3.6 Funções de deslastre ........................................................................................................... 17
2.3.7 Controlo da execução de ordens .......................................................................................... 17
2.3.8 Sinalizações ......................................................................................................................... 18
3. Unidade de Automação ........................................................................................................ 19
3.1
Apresentação ............................................................................................................................. 19
3.2
Hardware ................................................................................................................................... 19
3.3
Software ..................................................................................................................................... 21
3.3.1 Toolbox II.............................................................................................................................. 21
3.3.2 OPM II – Estrutura de um projecto ....................................................................................... 22
3.3.3 CAEx Plus ............................................................................................................................ 23
3.3.4 Norma IEC 61131-3.............................................................................................................. 23
4. Função de Regulação Automática de Tensão ................................................................... 25
4.1
Especificações ........................................................................................................................... 25
4.2
Algoritmo .................................................................................................................................... 26
4.3
Toolbox II – Configuração do projecto ....................................................................................... 29
4.3.1 Estrutura base ...................................................................................................................... 29
4.3.2 Hardware instalado............................................................................................................... 29
4.3.3 Estrutura de variáveis exteriores .......................................................................................... 30
4.3.4 Endereçamento de variáveis ................................................................................................ 38
iv
4.4
Programação da função ............................................................................................................. 39
4.4.1 Atribuição de nomes ............................................................................................................. 39
4.4.2 Instância “AVR” .................................................................................................................... 39
4.4.3 Configuração da subestação ................................................................................................ 40
4.4.4 Recepção e verificação de medidas do exterior ................................................................... 43
4.4.5 Gestão de regulação em paralelo ........................................................................................ 49
4.4.6 Transformadores – Elaboração de ordens ........................................................................... 53
4.4.7 Transformadores – Emissão e controlo de ordens ............................................................... 61
5. Testes funcionais ................................................................................................................. 65
5.1
Características da simulação ..................................................................................................... 65
5.1.1 Subestação .......................................................................................................................... 65
5.1.2 Linhas de saída .................................................................................................................... 66
5.2
Testes Offline ............................................................................................................................. 67
5.2.1 Transformadores e comutadores de tomadas ...................................................................... 67
5.2.2 Potência de carga ................................................................................................................ 68
5.2.3 Parametrização do menu de configuração ........................................................................... 68
5.2.4 Resultados ........................................................................................................................... 70
5.3
Testes Online ............................................................................................................................. 79
5.3.1 Lista de equipamento utilizado ............................................................................................. 79
5.3.2 Estrutura da montagem ........................................................................................................ 79
5.3.3 Características da rede simulada ......................................................................................... 80
5.3.4 Parametrização da mala de ensaios .................................................................................... 81
5.3.5 Parametrização do transdutor 7KG6000-8EBNN ................................................................. 82
5.3.6 Parametrização do menu de configuração ........................................................................... 83
5.3.7 Descrição de ligações da régua de bornes .......................................................................... 84
5.3.8 Descrição de ligações da protecção 7SJ63.......................................................................... 86
5.3.9 Cálculos auxiliares................................................................................................................ 86
5.3.10 Resultados ........................................................................................................................... 87
6. Conclusões............................................................................................................................ 88
6.1
Observações finais .................................................................................................................... 88
6.2
Propostas futuras ....................................................................................................................... 88
Anexos ........................................................................................................................................ 90
Anexo 1 – Cálculo de correntes reactivas de circulação ....................................................................... 90
Anexo 2 – Esquema de ligação de blocos ............................................................................................ 91
Anexo 3 – Verificação da simulação online ........................................................................................... 92
Referências ................................................................................................................................. 98
v
Lista de Figuras
Figura 2.1 – Regulação de tensão nos sistemas de energia ................................................................................... 3
Figura 2.2 – Comutador de tomadas para transformadores .................................................................................... 4
Figura 2.3 – Transformador com regulação de tensão ............................................................................................ 5
Figura 2.4 – Intervenientes da regulação automática de tensão.............................................................................. 6
Figura 2.5 – Ligações numa subestação de distribuição ......................................................................................... 7
Figura 2.6 – Circuito equivalente da operação de transformadores em paralelo ..................................................... 9
Figura 2.7 – Queda de tensão na linha .................................................................................................................. 14
Figura 2.8 – Esquema base do método “Centro de Carga” ................................................................................... 15
Figura 3.1 – AK 1703 ACP – Rack com 9 slots...................................................................................................... 19
Figura 3.2 – AK 1703 ACP - Instalação das cartas no rack ................................................................................... 20
Figura 3.3 – Toolbox II – Estrutura de um projecto ................................................................................................ 22
Figura 4.1 – Fluxograma do funcionamento da função “AVR” ............................................................................... 28
Figura 4.2 – ToolBox II – Estrutura de variáveis exteriores ................................................................................... 30
Figura 4.3 – Atribuição de nomes aos parâmetros ................................................................................................ 39
Figura 4.4 – Configuração máxima das subestações ............................................................................................ 40
Figura 4.5 – Bloco “BLC1.1_STN” ......................................................................................................................... 41
Figura 4.6 – Bloco “BLC2.1_PWR” ........................................................................................................................ 43
Figura 4.7 – Bloco “BLC2.2_TAP”.......................................................................................................................... 47
Figura 4.8 – Bloco “BLC4.7_CIR” .......................................................................................................................... 47
Figura 4.9 – Bloco “BLC3.1_GRP” ......................................................................................................................... 49
Figura 4.10 – Bloco “BLC3.2_PRL”........................................................................................................................ 51
Figura 4.11 – Elaboração de ordens ...................................................................................................................... 53
Figura 4.12 – Bloco “BLC_4.1_DVI”....................................................................................................................... 54
Figura 4.14 – Característica do tempo inverso ...................................................................................................... 57
Figura 4.13 – Bloco “BLC4.2_BDW” ...................................................................................................................... 57
Figura 4.15 – Bloco “BLC4.3_CPC” ....................................................................................................................... 59
Figura 4.16 – Bloco “BLC4.4_DES” ....................................................................................................................... 60
Figura 4.17 – Bloco “BLC4.5_ORD”....................................................................................................................... 61
Figura 4.18 – Bloco “BLC4.6_VRF” ....................................................................................................................... 63
Figura 4.19– Comportamento do bloco “BLC4.6_VRF” ......................................................................................... 64
Figura 5.1 – Configuração da subestação a simular .............................................................................................. 65
Figura 5.2 – Diagrama de carga simulado ............................................................................................................. 68
Figura 5.3 – Simulação do módulo base da função “AVR” .................................................................................... 70
Figura 5.4 – Resultado da simulação da sub-função “Bloqueio por mínimo de tensão” ........................................ 71
Figura 5.5 – Resultado da interacção com a função “Comando de bateria de condensadores”............................ 73
Figura 5.6 – Resultado do teste da interacção com a função de “Deslastre por reposição de tensão” ................. 74
Figura 5.7 – Resultados do teste da funcionalidade “LDC”.................................................................................... 75
Figura 5.8 – Resultados do teste de regulação em paralelo .................................................................................. 76
Figura 5.9 – Resultados do teste às sinalizações emitidas pela função ................................................................ 77
Figura 5.10 – Esquema da montagem simulada.................................................................................................... 79
Figura 5.11 – Montagem laboratorial ..................................................................................................................... 80
Figura 5.12 – Ligação do transdutor 7KG6000 ...................................................................................................... 82
Figura 6.1 – Proposta da página de gestão da função “AVR”................................................................................ 89
vi
Figura 6.2 – Proposta da página de parametrização da função “AVR” .................................................................. 89
Figura 0.1 – Parametrização do ficheiro de cálculo ............................................................................................... 90
Figura 0.2 – Esquema de ligações da instância “AVR” .......................................................................................... 91
Figura 0.3 – Esquema de ligações do bloco “BLC4.0_TRF” .................................................................................. 91
Lista de Tabelas
Tabela 2.1 – Regime de funcionamento na passagem para paralelo ...................................................................... 8
Tabela 2.2 – Regimes de funcionamento em paralelo ............................................................................................. 8
Tabela 2.3 – Lista de sinalizações emitidas pela função ....................................................................................... 18
Tabela 3.1 – AK 1703 ACP - Hardware ................................................................................................................. 20
Tabela 3.2 – Ferramentas da ToolBox II ................................................................................................................ 21
Tabela 3.3 – Tipo de dados na norma 61131 ........................................................................................................ 24
Tabela 4.1 – Resumo das especificações da função “AVR” .................................................................................. 25
Tabela 4.2 – Condições de arranque da função .................................................................................................... 26
Tabela 4.3 – Toolbox II – Estrutura funcional da função “AVR” ............................................................................. 29
Tabela 4.4 – Estrutura de variáveis exteriores dos estados das ligações na subestação ..................................... 31
Tabela 4.5 – Estrutura de variáveis exteriores relativas às medições nos transformadores.................................. 32
Tabela 4.6 – Estrutura de variáveis de parametrização dos transformadores ....................................................... 34
Tabela 4.7 – Lista de ordens enviadas/recebidas pelos transformadores ............................................................. 35
Tabela 4.8 – Lista de sinalizações dos transformadores ....................................................................................... 36
Tabela 4.9 – Estrutura de variáveis exteriores relativas às medições dos grupos de transformação .................... 37
Tabela 4.10 – Estrutura de variáveis de parametrização dos grupos de transformação ....................................... 37
Tabela 4.11 – Resumo do endereçamento de variáveis exteriores ....................................................................... 38
Tabela 4.12 – Codificação das configurações dos transformadores...................................................................... 41
Tabela 4.13 – Descrição de inputs do bloco “BLC1.1_STN”.................................................................................. 42
Tabela 4.14 – Descrição de outputs do bloco “BLC1.1_STN” ............................................................................... 42
Tabela 4.15 – Descrição de inputs do bloco “BLC2.1_PWR” ................................................................................ 46
Tabela 4.16 – Descrição de outputs do bloco “BLC2.1 _PWR” ............................................................................. 46
Tabela 4.17 – Descrição de inputs do bloco “BLC2.2_TAP ................................................................................... 47
Tabela 4.18 – Descrição de outputs do bloco “BLC2.2_TAP”................................................................................ 47
Tabela 4.19 – Descrição dos inputs do bloco “BLC4.7_CIR” ................................................................................. 48
Tabela 4.20 – Descrição dos outputs do bloco “BLC4.7 _CIR” .............................................................................. 48
Tabela 4.21 – Descrição de inputs do bloco “BLC3.1_GRP” ................................................................................. 50
Tabela 4.22 – Descrição de outputs do bloco “BLC3.1_GRP” ............................................................................... 50
Tabela 4.23 – Descrição de inputs do bloco “BLC3.2_PRL” .................................................................................. 52
Tabela 4.24 – Descrição dos inputs do bloco “BLC4.1_DVI” ................................................................................. 56
Tabela 4.25 – Descrição dos outputs do bloco “BLC4.1_DVI” ............................................................................... 56
Tabela 4.26 – Descrição dos inputs do bloco “BLC4.2_BDW” ............................................................................... 58
Tabela 4.27 – Descrição dos outputs do bloco “BLC4.2_BDW”............................................................................. 58
Tabela 4.28 – Descrição dos inputs do bloco “BLC4.3_CPC” ............................................................................... 59
vii
Tabela 4.29 – Descrição dos outputs do bloco “BLC4.3_CPC” ............................................................................. 59
Tabela 4.30 – Descrição dos inputs do bloco “BLC4.4_DES”................................................................................ 60
Tabela 4.31 – Descrição dos outputs do bloco “BLC4.4_DES” ............................................................................. 60
Tabela 4.32 – Descrição dos inputs do bloco “BLC4.5_ORD” ............................................................................... 62
Tabela 4.33 – Descrição dos outputs do bloco “BLC4.5_ORD” ............................................................................. 63
Tabela 4.34 – Descrição dos inputs do bloco “BLC4.6_VRF” ................................................................................ 64
Tabela 4.35 – Descrição dos outputs do bloco “BLC4.6_VRF” .............................................................................. 64
Tabela 5.1 – Características das linhas simuladas ................................................................................................ 66
Tabela 5.2 – Características dos transformadores de potência ............................................................................. 67
Tabela 5.3 – Parametrização da função "AVR" na simulação offline ..................................................................... 69
Tabela 5.4 – Características dos transformadores de potência ............................................................................. 80
Tabela 5.5 – Parametrização nominal da mala de ensaios ................................................................................... 81
Tabela 5.6 – Configuração dos transdutores 7KG6000 ......................................................................................... 82
Tabela 5.7 – Configuração da função "AVR" para a simulação online .................................................................. 83
Tabela 5.8 – Ligações das cartas de entradas digitais nas réguas de bornes....................................................... 84
Tabela 5.9 – Ligações da carta de entradas analógicas na régua de bornes ........................................................ 85
Tabela 5.10 – Descrição das ligações da carta de saídas digitais na régua de bornes ......................................... 85
Tabela 5.11 – Ligações da 7SJ enquanto comutador de tomadas ........................................................................ 86
Tabela 5.12 – Valores da simulação para transformadores em paralelo ............................................................... 87
Tabela 0.1 – Resultado do cálculo das correntes reactivas de circulação ............................................................. 90
viii
Lista de Abreviações
– Desvio da tensão
ACP - Automação, Controlo e Protecção
AVR – Automatic Voltage Regulator
AT – Alta Tensão
AU – Automation Unit
BMT – Bloqueio por mínimo de tensão
IEC – International Electrotechnical Commission
– Corrente complexa no secundário do transformador
– Corrente complexa de circulação entre o transformador x e transformador y
– Corrente complexa de carga
IL – Instruction List
LDC - Line-Drop Compensation.
– Relação de transformação do transformador
MT – Média Tensão
PLC – Programmable Logic Controller
QEE – Qualidade da Energia Eléctrica
– Resistência de parametrização do LDC
SEE – Sistema de Energia Eléctrica
– Identificação do transformador x
– Módulo da tensão base/ tensão referência (valor eficaz)
– Tensão complexa no primário do transformador
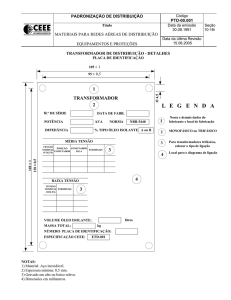
′ – Tensão complexa à saída do transformador idealFigura 2.3 – Transformador com regulação de tensão
– Tensão complexa no secundário do transformador
– Reactância de parametrização do LDC
- Impedância de curto circuito do transformador vista do secundário
ix
1. Introdução
1.1 Enquadramento
Os Sistemas de Energia Eléctrica em corrente alternada funcionam com frequência e tensão
constantes. Esta característica implica a existência de métodos de controlo que permitam manter os
valores nominais dentro de limites aceitáveis.
A tensão é uma grandeza de carácter local e a sua regulação é efectuada ao longo de todo o
sistema, sendo por isso alvo de diferentes técnicas desde a produção ao consumidor final. Ao nível
do transporte e distribuição são frequentemente utilizados transformadores de potência com
regulação em carga, os quais compensam variações de tensão que ocorrem ao longo do sistema,
alterando a relação de transformação por meio de um comutador instalado num dos enrolamentos –
geralmente o de tensão mais elevada, ao qual corresponde a menor intensidade de corrente.
As ordens para o comutador de tomadas são geradas pela função de “Regulação Automática
de Tensão”, presente nos autómatos na subestação. Os métodos de cálculo desta função diferem
entre as diferentes marcas de autómatos disponíveis no mercado e são estudados no decorrer deste
trabalho.
O funcionamento base da função compara permanentemente a tensão aos terminais do
transformador com um valor de referência, emitindo uma ordem aos dispositivos de comando dos
comutadores de tomadas se o desvio admissível for excedido durante um tempo pré-fixado,
resultando assim, o aumento ou a diminuição do valor da tensão secundária.
O algoritmo da regulação automática deve considerar outros factores por forma a optimizar o
seu resultado. Desde logo, a regulação em paralelo de transformadores de potência minimizando as
correntes de circulação que surgem neste tipo de exploração, assim como deverá interagir com
outros automatismos presentes na subestação, cuja actuação influencie o perfil da tensão a regular
como o accionamento de baterias de condensadores ou funções de deslastre de carga.
1.2 Objectivos
Com a realização deste trabalho pretende-se desenvolver o software de regulação automática
de tensão, necessário para que a unidade remota de teleacção da Siemens AK 1703 execute a
função nas subestações de distribuição de energia.
As funcionalidades desenvolvidas deverão ter como base soluções de pesquisa no domínio da
automação de energia apresentadas nos últimos anos, de forma a utilizar a solução mais robusta,
numa perspectiva de optimização de desempenho da função.
A função desenvolvida deverá ser testada e os resultados obtidos validados através de testes
realizados em laboratório, sendo que numa fase final o regulador deverá ser instalado num sistema
de comando e controlo de uma subestação que esteja em construção.
1
1.3 Estrutura da Dissertação
A dissertação é constituída por 6 capítulos.
No capítulo 1 é feito o enquadramento do trabalho e são apresentados os objectivos na
realização do mesmo.
No capítulo 2 é feito o estudo sobre a temática da regulação automática de tensão, onde são
descritos os principais componentes: o transformador com comutação de tomadas e a automação de
regulação de tensão.
No capítulo 3 são apresentadas as principais características da solução de automação da
Siemens – hardware e software – onde é desenvolvida a função de regulação automática, assim
como o protocolo utilizado no desenvolvimento de novas funcionalidades de acordo com a norma
IEC-61131-3.
O capítulo 4 descreve o processo de desenvolvimento da função. Começa-se por listar as
funcionalidades exigidas e posteriormente são explicados os algoritmos criados para responder às
especificações. Na última parte deste capitulo é feita uma descrição funcional dos blocos criados para
a função de automação.
Os testes funcionais e resultados obtidos são apresentados no capítulo 5, sendo descritos os
processos utilizados nos testes, através da validação de valores: em modo offline utilizando o
simulador da ferramenta de desenvolvimento; e em funcionamento online com valores recebidos do
exterior da função, simulados por uma estrutura de ensaios presentes no laboratório de testes.
No capítulo 6 são feitas as considerações finais deste trabalho e propostas novas
funcionalidades que podem contribuir para o melhoramento e aperfeiçoamento da função criada.
2
2. Estado de arte – Regulação de Tensão
2.1 Regulação de tensão nos Sistemas de Energia Eléctrica
O Sistema de Energia Eléctrico é altamente dinâmico, e no espaço de um dia verificam-se
alterações tanto pela inconstância da carga como, mais recentemente pela injecção de energia de
forma descentralizada, proveniente de fontes eólica ou solar a horas não programadas. As
perturbações referidas modificam o valor de tensão nos diferentes pontos da rede, sendo por isso
necessário meios de regulação ao longo de todo o sistema energético no intuito de manter o seu
valor dentro dos limites admissíveis.
A tensão é uma grandeza de carácter local que depende fortemente dos trânsitos de potência
reactiva, logo o controlo de tensão/potência reactiva é efectuado quer central quer localmente desde
a geração até aos consumidores finais. As exigências na sua regulação não são tão severas quanto
as da frequência, sendo normalmente aceite uma banda de variação de ±5% do valor nominal.
Os métodos utilizados diferem de acordo com a zona da rede em questão, como representado
na figura 2.1.
Figura 2.1 – Regulação de tensão nos sistemas de energia
A regulação de tensão na geração é feita através do controlo do sistema de excitação dos
geradores síncronos, produzindo ou absorvendo potência reactiva de acordo com a corrente de
excitação – quando sub-excitados, os geradores consomem potência reactiva e com o aumento da
corrente de excitação aumenta a potência reactiva produzida.
Outra forma de controlo de tensão representada na figura prende-se com a injecção de
potência reactiva em locais estratégicos da rede, como é estudado no ponto 2.3.5 deste trabalho.
No caso limite, toda a energia reactiva deveria ser produzida localmente onde é consumida, para que
o perfil da tensão ao longo da rede seja aproximadamente uniforme. Em termos práticos é possível
injectar potência reactiva através da instalação de:
•
Condensadores e bobines em paralelo;
•
Condensadores em série;
•
Compensadores síncronos;
•
Compensadores estáticos.
Ao nível do transporte e da distribuição, a regulação de tensão é feita através de
transformadores com comutação de tomadas. Estes permitem compensar variações de tensão
que inevitavelmente ocorrem ao longo do sistema, através da alteração da relação de transformação
3
aumentando ou diminuindo a tensão aos seus terminais, tal como aprofundado no ponto seguinte
deste trabalho.
A variação da relação de transformação que o comutador de tomadas proporciona altera o
fluxo de potência reactiva entre os subsistemas ligados ao transformador, o que acarreta uma
modificação do perfil de tensão. Logo, numa rede malhada, é necessário coordenar o controlo dos
comutadores de tomadas em todos os transformadores que interligam dois níveis de tensão.
As ordens para o comutador de tomadas dos transformadores são determinadas pela função
de regulação automática de tensão, presente nos autómatos na subestação e assunto deste trabalho.
2.2 Transformadores com comutação de tomadas
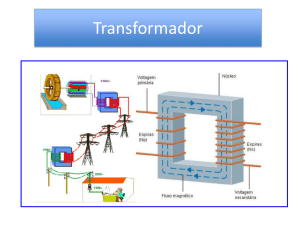
O transformador é um dos componentes essenciais dos Sistemas de Energia Eléctrica,
permitindo alterar a tensão de uma rede para o nível mais adequado à função que esta desempenha.
Se este for dotado de um comutador de tomadas, como o que se encontra representado figura 2.2,
pode ainda ser utilizado como regulador de tensão.
Figura 2.2 – Comutador de tomadas para transformadores
O comutador de tomadas permite variar a relação de transformação entre o primário e o
secundário do transformador, alterando o número de espiras do enrolamento (equação 2.1
(1)
). De
maneira geral, este é instalado no lado da tensão mais elevada – o qual é percorrido pela corrente
mais baixa. Em subestações de distribuição isso verifica-se no enrolamento primário, onde está
ligada a alta tensão logo a alteração da relação de transformação permite regular a média tensão
ligada ao secundário do transformador.
Onde:
•
m – Relação de transformação;
•
V1n – Tensão nominal do primário do transformador;
•
V2n – Tensão nominal do secundário do transformador;
•
∆V1 – Desvio de tensão causado pela alteração do número de espiras.
(2.1)
4
A comutação de tomadas pode ser em vazio ou em carga. Neste último caso, o comutador é
accionado por um motor controlado automaticamente que mantém a tensão no barramento
especificado dentro de limites definidos (uma vez que a variação da relação de transformação não é
continua, não é possível regular a tensão para um valor exacto). Devido às condições a que está
sujeito durante o seu funcionamento, o comutador em carga é um elemento dispendioso e do ponto
de vista de fiabilidade constitui um ponto fraco do transformador.
Num transformador com regulação em vazio (caso dos transformadores de distribuição), a
gama de regulação ∆v é tipicamente ±5% em escalões de 2,5 %. Por sua vez, os transformadores
que têm regulação em carga (caso dos transformadores de rede), a gama de regulação é em geral
±10/15%, em escalões de 1%.
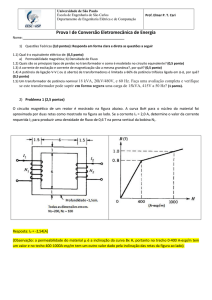
O transformador com regulação pode ser modelado de modo simplificado por um
transformador ideal com relação de transformação m em série com a impedância de curto-circuito
Zcc, resultando o esquema monofásico equivalente, tal como apresentado na figura 2.3.
Figura 2.3 – Transformador com regulação de tensão
a) Esquema unifilar
b) Esquema monofásico equivalente
Analisando o circuito da figura 2.3 b, obtêm-se as equações:
′
•
V1 – Tensão complexa aos terminais do primário do transformador;
•
V1‘– Tensão complexa à saída do transformador “ideal”.
(2.2)
A tensão à saída do transformador “ideal” é calculada pela equação 2.3
′ •
V2 – Tensão complexa aos terminais do secundário do transformador;
•
Zcc – Impedância de curto-circuito do transformador, vista do secundário;
•
I2 – Corrente complexa à saída do transformador.
(2.3)
Combinando as equações anteriores é formulada a equação 2.4, que relaciona as tensões à
entrada e saída do transformador
(2.4)
5
2.3 Função de “Regulação Automática de Tensão”
Os comutadores de tomadas dos transformadores de potência da subestação recebem ordens
de subir ou descer da função de “Regulação Automática de Tensão” (AVR – Automatic Voltage
Regulator), a qual é executada a partir dos autómatos presentes na subestação. Esta função permite
calcular a tomada mais indicada em cada instante considerando os valores aos terminais do
transformador que controla, assim como as funções em execução na subestação que podem alterar o
perfil de tensão, tal como representado esquematicamente na figura 2.4.
Figura 2.4 – Intervenientes da regulação automática de tensão
A função compara permanentemente a tensão do barramento com um valor de referência prédefinido, calculando o desvio nesse instante. Se o desvio admissível for excedido durante o tempo
parametrizado é emitida uma ordem de “subir” ou de “descer” aos dispositivos de comando dos
comutadores de tomadas em serviço dos transformadores do barramento em questão.
O módulo base de cálculo apresentado previamente deve ainda considerar outras funções em
execução na subestação e detectar alterações topológicas que influenciem o perfil da tensão a
regular. Para além disso, a função é complementada com funcionalidades adicionais, assim como a
emissão de sinalizações de acordo com a monitorização de parâmetros, descritas de seguida.
6
2.3.1 Regimes de funcionamento
A função de regulação de tensão deverá apresentar obrigatoriamente dois regimes de
funcionamento distintos (2):
• Manual – A acção de Regulação Automática de Tensão está inibida e é feito o comando
voluntário do comutador de tomadas em serviço localmente ou remotamente.
• Automático – A acção de Regulação Automática de Tensão é permitida e o comando do
comutador de tomadas pelo utilizador não é permitido.
Em última instância, estes regimes podem ser considerados como o interruptor desta função:
permitem ligar ou desligar a emissão de ordens. Adicionalmente, a colocação da função em modo
“manual” deverá atribuir ao automatismo os seus valores iniciais, funcionando desta forma como um
“reset” da função.
2.3.2 Configuração da subestação
As subestações são dotadas de equipamento de protecção e corte – disjuntores e
seccionadores – representados esquematicamente na figura 2.5, cujo accionamento pode alterar a
capacidade de entregar energia num determinado barramento.
Figura 2.5 – Ligações numa subestação de distribuição
Estando em serviço, a subestação é sujeita à acção destes equipamentos devido à
imprevisibilidade do SEE, pois estes respondem perante a ocorrência de curto circuito, solicitações de
potência adicional ou até mesmo o excesso/falta de tensão ou corrente no sistema.
A função de regulação automática deve determinar continuamente a topologia da subestação a
partir da base de dados representativa da posição dos diferentes órgãos dos painéis AT e MT do
transformador e dos painéis MT de fecho ou paralelo de barras, reconhecendo os transformadores
que estão ligados a cada um dos barramentos ou semibarramentos MT e, consequentemente, saber
se estão em serviço, em funcionamento individual ou em paralelo.
A actuação da função é ao nível de cada um dos barramentos ou semibarramentos de média
tensão da subestação, comandando os comutadores de tomadas em serviço dos transformadores
ligados a esse barramento. Esta deve actuar simultaneamente nos transformadores ligados a
barramentos separados, e nos transformadores ligados em paralelo de forma completamente
independente.
7
A parametrização da função em funcionamento individual pode ser diferente em cada
semibarramento. No entanto, se os barramentos forem interligados, deve ser garantida a mesma
parametrização em todos os transformadores do grupo. Um caso particular de parametrização é o
regime de funcionamento (“Manual”/”Automático”) que pode ser diferente em cada um dos
barramentos. Porém, se dois barramentos em funcionamento individual apresentarem regimes de
funcionamento diferentes e se for estabelecido o paralelo entre eles, o regime “Automático” prevalece
sobre o regime “Manual” e passará a abranger todos os transformadores ligados ao barramento
resultante da interligação, de acordo com a tabela 2.1.
Condições iniciais
Condições finais
(Comando individual)
(Comando em paralelo)
AVR 1
AVR 2
AVR 1
AVR 2
Manual
Manual
Manual
Manual
Manual
Automático
Automático
Automático
Automático
Manual
Automático
Automático
Automático
Automático
Automático
Automático
Tabela 2.1 – Regime de funcionamento na passagem para paralelo
Estabelecido o paralelo dos transformadores, a mudança do regime de funcionamento num
deles deverá ser simultaneamente repercutido no outro, de acordo com a tabela 2.2.
Condições finais
Ordem voluntária a um dos
reguladores de tensão
(Comando paralelo)
(Comando paralelo)
AVR 1
AVR 2
Manual
Manual
Manual
Automático
Automático
Automático
Tabela 2.2 – Regimes de funcionamento em paralelo
Na rede de distribuição da EDP existem no máximo três transformadores a comandar em cada
subestação e três barramentos cuja tensão deve ser regulada. Consequentemente, numa subestação
com a configuração máxima prevista – três transformadores e três semi barramentos – deverá ser
possível comandar três transformadores em paralelo se os semibarramentos estão todos interligados;
ou o comando individual de cada um dos transformadores, caso os semibarramentos se encontrem
separados.
8
2.3.3 Comando de transformadores em paralelo
A operação de transformadores em paralelo é muito habitual em subestações de transporte e
distribuição de energia, com mais relevância no desempenho da rede, devido à segurança, fiabilidade
e robustez que introduzem no sistema, garantidas pelas seguintes características:
• Fornecimento ininterrupto de energia em caso de falhas de um dos transformadores;
• Divisão da potência entre transformadores, não sobrecarregando nenhum deles;
• Aumento da capacidade de entregar potência naquele ponto da rede;
Apesar das vantagens apresentadas, verifica-se que neste tipo de tipologia existe a formação
de uma corrente de circulação entre transformadores, representada na figura 2.6 que, sob condições
adversas, pode atingir valores que levam à saturação dos transformadores, diminuindo o seu
rendimento.
Figura 2.6 – Circuito equivalente da operação de transformadores em paralelo
Correntes reactivas de circulação
As correntes de circulação surgem quando se verificam diferentes tensões aos terminais dos
transformadores ligados em paralelo. Assumindo que estes transformadores são alimentados pela
mesma tensão (igual tensão no primário) e recorrendo à manipulação da equação 2.4, vem:
(2.5)
Onde Tx corresponde à identificação do transformador do grupo de T1 a Tα.
Da análise da equação 2.5, concluiu-se que a diferença de tensões pode ser criada pela
posição da tomada de cada transformador provocando diferentes relações de transformação ou
9
simplesmente por estes apresentarem diferentes características construtivas, ou seja, diferentes
impedâncias de curto-circuito.
Considerando agora as correntes de circulação, as correntes no secundário dos
transformadores são calculadas pelas equações seguintes
Onde:
!
(2.6)
!
(2.7)
!
(2.8)
!
!
!
Tx
• I2 – Corrente total que circula no secundário do transformador Tx;
• IL
•
Tx
– Corrente no secundário do transformador Tx devido à solicitação da carga;
TxTy
–
Icir
Corrente de circulação entre os transformadores Tx e Ty.
As equações 2.6, 2.7 e 2.8 demonstram que neste exemplo o transformador 1 é adicionalmente
carregado com todas as correntes de circulação, enquanto que todos os outros estão aliviados pelas
correntes de circulação.
Por sua vez, a corrente total na carga é calculada através da equação 2.9
!
" " " (2.9)
Substituindo as equações 2.6, 2.7 e 2.8 na equação da corrente da carga, resulta
(2.10)
Verifica-se que todas as correntes de circulação são eliminadas, sendo possível concluir que
estas são independentes da corrente solicitada pela carga, obtendo-se
#$
(2.11)
Feita esta consideração é possível calcular a amplitude e o ângulo das correntes de circulação,
assumindo que os transformadores se encontram em vazio. Conhecendo as tensões aos terminais
dos transformadores “ideais” definidos no capítulo 2.2, as suas impedâncias de curto-circuito Zcc e
desprezando a impedância da ligação entre eles, a corrente de circulação calcula-se através da
equação 2.12.
%
% $
(2.12)
De maneira geral as impedâncias dos transformadores são fortemente indutivas e a parte
activa pode ser desprezada, logo estas correntes são frequentemente chamadas correntes
reactivas de circulação. Acresce a este facto que os valores das impedâncias são habitualmente
baixos, por conseguinte resultam correntes de circulação bastante consideráveis, tal como
demonstrado nos resultados do programa de cálculo das correntes perante a variação das relações
de transformação apresentados no anexo 1.
10
Desequilíbrio de regulação entre transformadores
A exploração de transformadores em paralelo levanta outra questão em termos de regulação
relacionada com o valor da tensão no barramento ser alterada parcialmente quando apenas um dos
(3)
transformadores altera a sua relação de transformação .
Em termos práticos, se as impedâncias de curto-circuito de todos os transformadores são
iguais e um dos transformadores apresenta uma diferença ∆Vx, a tensão no barramento é dada pela
equação 2.13:
'()
&'' &'' Onde:
*
+
(2.13)
• n – Representa o número de transformadores ligados em paralelo;
• ∆Vx – Diferença de tensão que o transformador x apresenta em relação aos restantes
transformadores em paralelo;
Esta equação demonstra que para o caso de n=3, três transformadores ligados em paralelo,
com a mesma impedância, a variação de tensão de um transformador afecta a tensão no barramento
em apenas um terço, logo se a tensão dos transformadores com regulação mais alta for compensada
pelos transformadores com as tomadas mais baixas a tensão será ajustada, no entanto irão circular
correntes reactivas.
Métodos de regulação de transformadores em paralelo
As dificuldades para regular transformadores em paralelo apresentadas anteriormente
representam um problema para os exploradores da rede e fornecedores de dispositivos de regulação
automática
(3),(4)
, existindo por isso vários estudos na área relativos à solução que minimize os
impactos criados
(5), (6)
. Por forma a conhecer o actual estado da tecnologia, apresentam-se de
seguida as principais metodologias utilizadas pelos fabricantes e defendidas pelos investigadores
desta matéria.
Procedimentos que só consideram a tensão
Nestes procedimentos a regulação é feita de forma a que todos os transformadores
apresentem a mesma posição de tomadas. Este tipo de regulação representa a filosofia mais simples,
na qual os cálculos das ordens para o comutador consideram apenas as tensões aos terminais de um
dos transformadores e todos os outros recebem essas ordens.
Devido ao seu modo de funcionamento, este é indicado para transformadores com
características idênticas. Caso as características sejam distintas é necessário adaptar os valores, de
forma a que a posição seja equivalente à mesma tensão em circuito aberto. Em termos gerais para a
obtenção de bons resultados de regulação com este método as características deverão diferir no
máximo 10%.
•
Master/Slave (Controlo Síncrono na alteração de tomada) – Nesta técnica um dos
controladores assume o papel de master, funcionando assim como controlador principal,
enquanto que os outros reguladores limitam-se a seguir as ordens enviadas pelo master. O
11
master deve comparar continuamente a posição da sua tomada com a posição da tomadas dos
slaves, se existir um desvio o master garante que os restantes alteram para a mesma posição
que este apresenta.
•
Master/Follower (Automatic Synchronism) – Neste procedimento o slave é dotado de
alguma inteligência e consegue ler activamente a posição da tomada do master, conseguindo
posicionar-se independentemente, copiando a posição do master. A regulação com este
método permite ainda a introdução de um offset na posição das tomadas para que seja
possível a sua utilização em transformadores com características diferentes.
Os métodos apresentados revelam-se bastantes práticos e de desenvolvimento intuitivo, mas
não respondem aos problemas levantados neste capítulo relativamente às correntes de circulação.
Nota-se ainda uma grande dependência na troca de informação entre transformadores, sendo por
isso fundamental que estes métodos sejam dotados de sistemas de verificação e atribuição
automática de um novo master, perante a avaria deste ou até uma falha de comunicação entre
reguladores.
Procedimentos que consideram as correntes reactivas de circulação
Estes procedimentos consideram novas variáveis no sentido de minimizar as correntes
reactivas de circulação através do ajustamento mais adequado de tomadas. A realização dos seus
cálculos está dependente do conhecimento das correntes em dois pontos distintos:
•
Saída dos transformadores de potência;
•
Saída do barramento nos painéis de saída da subestação.
A medição da corrente reactiva no transformador não é suficiente, uma vez que esta também
pode ter origem numa carga indutiva. No entanto, considerando os dois pontos da subestação, a
proporção de corrente reactiva solicitada pela carga é matematicamente eliminada no processo
(como verificado anteriormente na equação 2.10).
O valor da corrente entregue à carga pode ser determinado pela soma vectorial das correntes
de todos os transformadores ou medido directamente no barramento de saída da subestação através
de um transformador de corrente adicional neste ponto.
O conhecimento adicional da corrente permite calcular a potência aparente entregue pelo
transformador e pelo grupo, assim como as suas componentes activas e reactivas, uma vez que já é
possível determinar o desfasamento entre tensão e corrente e o respectivo factor de potência.
•
∆I sinδ procedure – Trata-se do procedimento mais simples no tratamento das correntes
de circulação, considerando que todos os transformadores têm características semelhantes e
como tal a corrente de circulação é igual para todos os ramos.
O seu principio de funcionamento resulta da análise directa do circuito da figura 2.6, e dos
resultados da equação 2.10, onde se verifica que as correntes de circulação são
independentes da corrente solicitada pela carga.
A corrente reactiva de circulação em cada transformador é calculada dividindo a corrente
reactiva entregue pelo grupo pelo número de transformadores, subtraindo este valor à corrente
reactiva que passa em cada transformador de acordo com a equação 2.14.
12
,
,
-
.
,
Onde:
/
0
+
(2.14)
Tx
IcirQ – Corrente reactiva de circulação do transformador x;
I2Q
Tx
Gx
IQ
– Corrente reactiva no secundário do transformador x;
– Corrente reactiva entregue pelo grupo de transformação x;
∆I sin φ procedure – Este método é uma expansão do método anterior que considera as
•
diferentes características dos transformadores. O seu cálculo é baseado não só nas correntes
reactivas do sistema, mas também nas potências que cada transformador entrega, permitindo
assim determinar a corrente que passa em cada ramo de acordo com a equação 2.15.
,
,
1
.
,
2
3
2.
(2.15)
Neste caso a corrente reactiva entregue pelo grupo é ponderada pelos diferentes
transformadores de acordo com a potência que cada um entrega em cada instante e a potência
entregue pelo grupo. Onde:
Tx
S – Potência entregue pelo transformador x;
Gx
S
•
– Potência entregue pelo grupo de transformadores.
∆I cos δ procedure – Nos procedimentos anteriores é necessário conhecer os valores
instantâneos dos diferentes transformadores, para efectuar os cálculos das diferentes
correntes. No entanto, o sistema de energia elétrica é passível de falhas imprevisíveis, as quais
podem limitar ou destruir a comunicação desses valores. Como tal, foi desenvolvido este
método de cálculo, que permite fazer ou continuar a regulação dos transformadores quando a
informação da restante rede não está disponível.
O procedimento é baseado na criação de um setpoint da rede onde o regulador está inserido. A
criação do setpoint consiste na observação e registo da corrente reactiva no transformador e
no barramento de saída quando a rede está a funcionar correctamente e em condições
nominais.
Em caso de falha da rede a regulação é feita pela simples comparação do valor actual da
corrente no transformador com o valor definido no setpoint, ou seja: se a corrente reactiva
actual for superior, o transformador deverá descer; caso contrário o comutador deverá subir a
tomada.
Os métodos previamente apresentados representam as principais formas de regulação
utilizadas na actualidade. Verifica-se que aqueles que consideram as correntes de circulação são
mais independentes e não necessitam de receber a posição de tomadas de cada comutador,
efectuando os cálculos individualmente. No entanto, estes implicam a existência de mais
componentes (TI’s), logo é necessário adequar o método utilizado às condições de cada instalação.
13
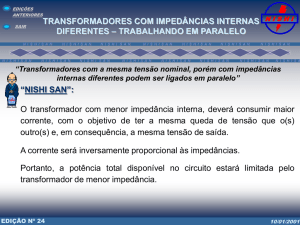
2.3.4 Compensação da queda de tensão na linha
As redes de transporte e distribuição extensas verificam quedas de tensão significativas ao
longo das linhas, devido à sua impedância característica. A existência desta queda de tensão implica
que o nível de tensão no barramento secundário da subestação não seja o mesmo no ponto de
entrega da energia, ou seja, mesmo que a tensão esteja regulada na saída de subestação, isso não
se verificará no ponto de consumo.
Em resposta a este problema, surge o LDC - Line-Drop Compensation
(7)
, cujo principal
objectivo é manter a tensão constante no consumidor e não no barramento secundário do
transformador. O seu principio de funcionamento é baseado no circuito da figura 2.7, onde estão
representadas as diferentes quedas de tensão do sistema a analisar.
Figura 2.7 – Queda de tensão na linha
A malha formada desde o barramento secundário do transformador até à carga, é traduzida
pela equação 2.16, onde se verifica a influência da queda de tensão na linha.
456789 (:' ';'
(2.16)
O cálculo da queda de tensão na linha pode ser efectuado pela equação 2.17, onde se verifica
que esta varia com o valor da corrente I à saída da subestação e com os parâmetros RL e XL –
resistência e a reatância da linha.
(:' < (2.17)
Combinando as duas equações anteriores, resulta a equação 2.18 que representa o principio
de funcionamento deste método, no qual o regulador considera um valor de tensão na saída da
subestação superior para diminuir a variação da tensão no final da linha.
9=>54'7' 456789 < (2.18)
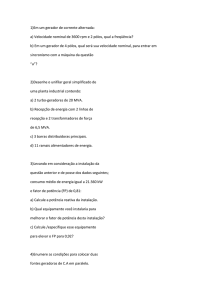
Um dos modos clássicos para ajustar os parâmetros do regulador para cada ponto de
regulação denomina-se “Centro de Carga”. Este método entra em conta com os valores dos
transformadores de corrente e de tensão que fornecem os valores para o regulador de acordo com a
montagem típica apresentada na figura 2.8.
14
Figura 2.8 – Esquema base do método “Centro de Carga”
A montagem apresentada permite que o controlador ajuste a tomada de acordo com a tensão
fornecida pelo transformador de tensão (TT) somando a tensão do circuito compensador de queda de
linha. Para isso, o cálculo dos parâmetros é feito de acordo com as equações 2.19 e 2.20.
Onde:
@A
0
@
(2.19)
@A
0
@
(2.20)
'?64)5 -
'?64)5 -
•
Rajuste → Ajuste do regulador para compensação resistiva [V];
•
Xajuste → Ajuste do regulador para compensação reativa [V];
•
In → Valor do secundário do transformador de corrente [A];
•
rTT → Relação de transformação do transformador de tensão;
•
rTI → Relação de transformação do transformador de corrente;
•
RL → Resistência da linha até ao ponto de regulação [Ω];
•
XL→ Reatância da linha para o ponto de regulação [Ω].
A utilização deste método levanta alguns problemas quando: na saída de subestação estão
ligadas várias linhas com diferentes características; ou a carga está distribuída ao longo linha. Como
a regulação é feita para um ponto concreto da rede, toda a rede a montante “vê” uma tensão superior
enquanto que a jusante se verificam tensões inferiores.
Em tom conclusivo, o método de compensação da tensão na linha funciona perfeitamente para
cargas distribuídas uniformemente ao longo da linha, com uma impedância também uniforme ou para
uma carga no final da linha. Caso contrário, poderão surgir sobretensões nos consumidores mais
próximos da subestação e subtensões para consumidores mais distantes.
15
2.3.5 Comando de baterias de condensadores
As baterias de condensadores permitem cancelar o excedente de potência reactiva solicitada
pelas cargas indutivas ou outras cargas com baixo factor de potência, diminuindo assim a corrente e
2
consequentemente as perdas nas linhas (PP=R*I ). Isto significa que a correcta aplicação de bancos
de condensadores pode aumentar a eficiência do sistema e reduzir a queda de tensão. Porém o seu
uso incorrecto pode significar maiores perdas e sobretensões.
A instalação pode ser efectuada em paralelo para compensar potência reactiva, elevando a
tensão naquele ponto, ou em série passando a funcionar como um regulador de tensão automático
comandado pela corrente, compensando a reatância da linha.
Existem dois tipos de baterias de condensadores disponíveis no mercado:
•
Baterias de condensadores fixas – São dimensionados de acordo com a instalação,
entregando constantemente a mesma potência, sendo por isso mais baratos;
•
Baterias de condensadores chaveados – Apenas são colocados em serviço de acordo
com a necessidade do sistema, implicando assim a existência de um software de controlo de
ligação à rede.
Devido à diminuição dos custos das tecnologias, muitos sistemas utilizam baterias de
condensadores com controlo automático cujas principais estratégias de despacho para controlo
remoto de condensadores são:
•
Realizado pelo operador;
•
Diário programado;
•
Mediante medições na subestação;
•
Combinação entre medições de variáveis na subestação e ao longo da linha;
Uma vez que a ligação das baterias de condensadores altera o perfil da tensão, esta deve ser
considerada pela função de regulação automática de tensão. A EDP utiliza em algumas das
subestações de distribuição a função “comando de baterias de condensadores”
(8)
, logo deverá ser
garantida uma interação entre as duas funções.
A função de regulação automática deverá permitir a diminuição da tensão de base uma
percentagem pré-fixada e parametrizável, por ordem da função “comando de baterias de
condensadores” no instante programado de ligação de uma bateria ao barramento em questão.
Perante este sinal, a função “regulação de tensão” deverá emitir ordens de descer até ao
restabelecimento do equilíbrio entre a tensão medida e a nova tensão referência. Estabelecido o
equilíbrio, a função “AVR” informará a função “comando de baterias de condensadores”,
desencravando a emissão da ordem de fecho ao disjuntor da bateria e a tensão de base do
barramento em questão deverá retomar o valor inicial.
16
2.3.6 Funções de deslastre
A função de deslastre ocupa um papel primordial nas redes de energia, uma vez que permite
responder a situações extremas que sujeitem a rede aos valores inadmissíveis referidos no ponto 2.1.
A causa mais habitual que pode despertar esta função, prende-se com a geração insuficiente para
servir a carga do sistema – saída não programada de um grupo ou central e as linhas de interligação
não dispõem de capacidade de transporte suficiente – nestes casos a frequência experimenta uma
redução sustentada no tempo e a partir de uma diminuição da ordem de 1 Hz, existe o risco de um
apagão geral, sendo activadas as funções de deslastre.
O deslastre de carga é desencadeando automaticamente por relés, os quais desligam
selectivamente blocos de consumidores, de forma a repor o equilíbrio entre a geração e o consumo,
em duas situações distintas:
•
Reposição por tensão – Para prevenir a passagem do valor máximo admissível da tensão,
devido à diminuição da carga;
•
Reposição por frequência – Quando o consumo é superior à produção.
A função de regulação automática de tensão deverá receber a informação quando os
programas de deslastre são activados, para prevenir a passagem do valor máximo admissível da
tensão, devido à diminuição da carga provocada pela acção dos respectivos programas de
“deslastre”. Neste caso o regulador deverá dar ordem ao comutador para se colocar na tomada de
referência, caso esta se encontre definida e o regulador esteja em modo “automático”.
Ao regressar a tensão a um barramento, após a execução do programa de deslastre por falta
de tensão, a característica de “tempo-desvio” deve ser comutada para “tempo inverso” em relação ao
barramento em questão. O retorno à característica “tempo independente” verificar-se-á quando a
função “deslastre/reposição por tensão” voltar ao repouso.
Por sua vez, perante a acção do programa de “deslastre por mínimo de frequência” a
característica de “tempo-desvio” deve ser comutada para “tempo inverso” em relação a todos os
barramentos da subestação e o retorno à característica “tempo independente” verificar-se-á quando a
função “deslastre/reposição por frequência” voltar ao repouso.
2.3.7 Controlo da execução de ordens
Após a emissão de uma ordem de subir ou de descer ao comutador de tomadas em serviço de
um transformador, a função deverá verificar se alteração foi bem sucedida. Para isso, deverá ser
disponibilizada a configuração de um tempo de espera depois da ordem ao comutador,
correspondente à duração da mudança de tomada. Durante o tempo de comutação não deverão ser
emitidas quais queres ordens, ficando a função num estado de standby. Findo o período de espera, a
função deverá verificar qual a nova posição de tomada, garantindo assim que o comutador
efectivamente mudou de tomada no sentido correcto.
Se a mudança de tomada não tiver sido correctamente efectuada, a função deverá ficar
bloqueada para o transformador em questão, e será emitida a sinalização “avaria do dispositivo de
comando do comutador de tomadas em serviço – ordem não cumprida” de acordo com a secção
2.3.8 deste documento.
17
2.3.8 Sinalizações
A correcta execução da função de regulação automática está dependente de vários factores
que deverão ser constantemente monitorizados. Alguns dos problemas que podem surgir durante o
seu funcionamento apenas são resolvidos com a intervenção do responsável pela subestação. Logo,
a função deve ser dotada de lógica que permita emitir ordens para um centro de comando, para que
os operadores possam ser alertados.
Na tabela 2.3 estão listadas as diferentes sinalizações que a função deverá emitir e os
(8)
respectivos significados dos diferentes estados .
Codificação
Descrição
Estado
0 – Manual (Default)
SNL_001
Modo de funcionamento
SNL_002
Tensão de base reduzida x %
[%]
SNL_003
Tensão de base reduzida com vista à ligação de baterias de
condensadores
0 – OFF (Default)
SNL_004
Característica de tempo desvio
1 – Automático
1 – ON
0 – Tempo independente
(Default)
1 – Tempo inverso
SNL_005
Ordem de subir
SNL_006
Ordem de descer
SNL_007
Bloqueio por mínimo de tensão
SNL_008
Excesso de circulação de potência reactiva entre
transformadores em paralelo
SNL_009
Máximo de tensão
SNL_010
Topo inferior
SNL_011
Topo superior
SNL_012
Avaria do dispositivo de comando do comutador de tomadas
em serviço - ordem não cumprida
SNL_013
Alarme de corrente de circulação
SNL_014
Disparo por corrente de circulação
SNL_015
Tomada de referência
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – Em serviço (Default)
1 – Fora de serviço
Tabela 2.3 – Lista de sinalizações emitidas pela função
18
3. Unidade de Automação
3.1 Apresentação
Os sistemas de protecção, monitorização e controlo tem assistido a uma grande evolução nos
últimos anos, na qual os fiáveis e robustos dispositivos electromecânicos dão lugar a dispositivos
electrónicos capazes de desempenhar várias funções simultaneamente e disponibilizar novas
funcionalidades com a mesma fiabilidade apresentada pelos seus antecessores.
Assiste-se assim, a uma tendência de soluções integradoras que consigam representar todos
os dados de um projecto na mesma plataforma, permitindo: optimização de recursos; maior
organização e uma considerável redução de custos indirectos. Desta perspectiva, a função de
regulação automática de tensão estudada neste trabalho é desenvolvida na solução de automação da
Siemens AK 1703, da família de produtos de ACP - Automation, Control and Protection.
Figura 3.1 – AK 1703 ACP – Rack com 9 slots
Na figura anterior é apresentado o componente base do hardware desta solução – o rack de 9
slots - onde são montados os restantes componentes. A flexibilidade desta solução é conseguida
através do projecto da estrutura interna do rack, escolhendo as cartas a instalar, de acordo com as
funções que esta irá desempenhar. Para além disso, é possível criar novas funcionalidades de
automação através de software – como a desenvolvida neste trabalho – na ferramenta CAExPlus e
gerir a sua execução na ferramenta OPM II.
3.2 Hardware
O dimensionamento do hardware do autómato AK 1703 começa na escolha do rack a utilizar,
de acordo com as características da instalação e a quantidade de funcionalidades a executar.
Existem 3 modelos disponíveis com 9,16 ou 17 slots para cartas e 2 ou 4 slots para alimentação, tal
como representado na figura 3.2, onde ainda se representa a forma de ligação das diferentes cartas
no interior do rack.
19
Figura 3.2 – AK 1703 ACP - Instalação das cartas no rack
A colocação das cartas no interior do rack tem apenas uma imposição relativa ao Master
Control Element, que ocupa sempre a primeira posição. Depois desta são colocados os restantes
módulos de acordo com a instalação em questão. Estes podem ser de diferentes tipos e são
apresentados na tabela 3.1.
Elemento
Posição
Descrição
Responsável pela gestão interna das diferentes
cartas no interior do rack, constituindo a unidade
de processamento central.
1
Master Control Element
A carta é dotada de uma porta de comunicação
série que permite a ligação com PC’s, de forma a
carregar toda a informação do projecto,
inclusivamente o software desenvolvido.
Carta responsável pela gestão das comunicações
em diferentes protocolos.
Processing and Communication
Element
Indiferente
Indicada quando o autómato deve comunicar em
diferentes protocolos e/ou existem ligações a
diferentes dispositivos de comunicação (routers,
switchs..).
Elemento que permite a ligação física com os
dispositivos de comunicação.
Connection Boards
Indiferente
Estas placas ligam-se na carta do Master Control
Element ou na carta do Processing and
Communication Element.
Cartas que permitem a comunicação com
dispositivos nas imediações do autómato.
Peripheral Elements
Indiferente
Estas diferem pelo tipo de sinal que processam e a
forma como o processam, a saber:
•
Entradas analógicas;
•
Entradas digitais;
•
Saídas analógicas;
•
Saídas digitais.
Tabela 3.1 – AK 1703 ACP - Hardware
20
3.3 Software
3.3.1 Toolbox II
A componente de software da solução é a ferramenta Toolbox II, a qual é composta por
diferentes aplicações que permitem realizar tarefas que vão desde: a gestão de equipamentos nas
diferentes instalações; monitorização de variáveis; criação de novas funcionalidades de automatismo
e respectiva distribuição para os diferentes módulos.
O facto de ter na sua base de dados todos os intervenientes do processo, permite criar novas
funcionalidades e efectuar testes de acordo com a estrutura montada no local da instalação
permitindo assim, que sejam corrigidos erros das automações antes das mesmas serem colocadas
em produção.
A ferramenta Toolbox II é constituída por várias aplicações que desempenham diferentes
funções. No entanto, apresentam-se na tabela 3.1 apenas aquelas que foram utilizadas na execução
deste trabalho.
ToolBox II
OPM – Object Oriented
Process Data Manager
Ferramenta que permite a configuração inicial do projecto
(secção 3.3.2):
•
•
•
Definição do “Costumer” e “Plant”;
Caracteristicas da instalação;
Configuração dos recursos disponíveis.
Aplicação de administração do projecto, através de:
TOOLBOX II Preset
Data distribution center
Plant Management
CAEx Plus
•
•
•
Configurações de acesso;
Definição de permissões dos utilizadores;
Reorganização da base de dados.
Aplicação de distribuição do projecto, através de:
• Depoyment de dados entre as diferentes unidades;
• Criação e gestão de backups.
Ferramenta de consulta directa à base de dados do ToolBox II,
permitindo assim a organização dos diferentes “Costumer”,
“Plant” e “AU’s””.
Criação e gestão de novas funcionalidades de automação
(secção 3.3.2)
Tabela 3.2 – Ferramentas da ToolBox II
21
3.3.2 OPM II – Estrutura de um projecto
O funcionamento interno do ToolBox II é baseado numa estrutura hierárquica, na perspectiva
de gestão de projecto, de forma a obter uma imagem o mais semelhante possível da instalação em
causa. Isto exige uma configuração inicial dos vários parâmetros, representados na figura 3.3,
efectuada na aplicação OPM II.
Figura 3.3 – Toolbox II – Estrutura de um projecto
Na figura anterior é apresentada uma estrutura fictícia, dos diferentes níveis de configuração da
ferramenta, onde estão presentes os parâmetros fundamentais de configuração de qualquer projecto,
são eles:
•
Customer Project – Representa o cliente para o qual o projecto está a ser desenvolvido. È
o topo da hierarquia desta estrutura e pode ter associado a ele diferentes locais de instalação.
De sublinhar, que este é um dado fundamental sem o qual a aplicação não permite
desenvolver qualquer funcionalidade.
•
Process Technical Plant – Segundo nível da hierarquia e representa uma instalação do
cliente anteriormente criado. Este é definido no início do projecto, após a criação de um
Costumer Project.
•
System Technical Plant – Representa um sistema dentro do Process Technical Plant onde
é possível definir e criar unidades de automação;
•
Regions – Traduz as diferentes zonas presentes numa instalação como: geração;
transformação; linhas de transporte com diferentes tensões.
•
Automation Units (AU) – Autómatos instalados em cada region.
A configuração final da instalação passa por definir o hardware que cada AU tem instalado.
Esta atribuição é feita de acordo com uma lista de componentes disponibilizada pela ferramenta
OPMII, onde constam todos os modelos disponíveis de processadores, placas de comunicação,
cartas de inputs e outputs para o modelo da AU utilizada.
22
3.3.3 CAEx Plus
O desenvolvimento de novas funcionalidades de automação para toda a gama de produtos
1703 ACP é feita na ferramenta CAEx Plus. Esta permite: criar; gerir; configurar; testar e documentar
software de loops abertos e fechados de acordo com a norma internacional IEC 61131-3.
O funcionamento do CAEx Plus está dependente da configuração efectuada na ferramenta
OPM II, uma vez que a criação de software é feita de acordo com as unidades de automação
disponíveis e com lista de sinais exteriores definidos.
A programação nesta aplicação é feita através da orientação por objectos de acordo com a
norma IEC 61131-3. Devido a este standard é disponibilizado em todos os projectos duas bibliotecas
construídas de acordo com esta norma, onde constam blocos previamente desenvolvidos com as
funções mais utilizadas.
Este método de desenvolvimento permite descrever unidades reais como: bombas;
interruptores ou conjuntos maiores como geradores, através de blocos e utilizá-los como objectos
definidos no processo de engenharia em qualquer parte do projecto. Este tipo de programação é
especialmente útil quando a instalação consiste em múltiplas unidades primárias e equipamentos do
mesmo tipo (transformadores, centrais hidroeléctricas, pipelines, etc.), permitindo ainda utilizar esses
componentes em outros projectos através da exportação de dados.
A gestão de funções de automatismo e blocos criados é feita numa estrutura em árvore de
acordo com a estrutura previamente criada na aplicação OPM II. O nível mais alto representa o
Process Technical Plant, apresentada no capítulo 3.3.2 e os respectivos níveis seguintes são
constituídos pelos diferentes resources definidos. Em cada um dos níveis, é possível a adição de
subpastas onde é possível adicionar documentações, comentários e até blocos de funções que o
projectista ache adequado.
3.3.4 Norma IEC 61131-3
A norma Internacional 61131-3 corresponde à terceira parte da norma 61131, cuja primeira
edição foi publicada em Dezembro de 1993 pela International Electrotechnical Commission (IEC),
sendo posteriormente lançada a segunda e corrente edição em 2003. Esta introduz bases
normalizadas de programação PLC (Programmable Logic Controller), resultante do crescimento de
dispositivos de automação e da procura de melhoramentos do desempenho da micro-tecnologia.
As linguagens clássicas de programação usadas como: listas de instruções; diagrama em
escada; ou diagramas de funções de bloco atingiram os limites das suas potencialidades verificandose assim a necessidade de uma linguagem e conceitos normalizados, por forma a obter uma
programação de alto nível e ferramentas de desenvolvimento uniforme.
Em termos de imposições, destaca-se o tipo de dados utilizados os quais estão apresentados
na tabela 3.3 e a definição de linguagens de programação de texto e gráficas, apresentadas de
seguida.
23
Bit Strings
Interger
Real
Time
String
Valores on/off
Números inteiros
Números reais
Duração de processos
Cadeias de caracteres
BOOL
SINT
REAL
TIME
Seg, Minutos, Horas
1 bit
Signed short (1 byte)
4 byte
BYTE
INT
LREAL
DATE
8 bit
Signed integer (2 byte)
8 byte
Data calendário
WORD
DINT
TIME_OF_DAY
16 bit
Double integer (4 byte)
Hora
DWORD
LINT
DATE_AND_TIME
32 bit
Long integer (8 byte)
Tempo de data
Arrays
Guarda múltiplos valores
do mesmo tipo
LWORD
64 bit
Tabela 3.3 – Tipo de dados na norma 61131
Linguagens de Programação de Texto
Instruction List (IL) - É uma linguagem de programação orientada pela linha (line-oriented),
onde cada linha contém uma instrução, consequentemente a soma das instruções é processada
sequencialmente. Este método de programação é bastante simples o que lhe confere vantagens,
como a possibilidade da compilação directa na máquina onde é desenvolvido o código e a
inexistência de perdas de eficiência devido a comandos abstractos durante a compilação.
Structured Text (ST) - É uma linguagem de programação de alto nível semelhante ao
PASCAL, onde não só são utilizados comandos machine oriented, mas também comandos abstractos
que podem ser combinados em diferentes sequências de comandos. Logo, já permite uma
programação mais compacta e uma visão geral do programa mais intuitiva devido à sua estrutura.
Linguagens de Programação Gráficas
Ladder Diagram (LD) – Este método tem a sua origem associada à área de sistemas de
protecções eletromecânicas, representando o diagrama da rede no seu código e compilando a
informação dos estados das diferentes ligações do circuito de forma sequencial. A execução do
código neste método é feita inicialmente na vertical, varrendo posteriormente o diagrama na
horizontal, advindo daí o seu nome: “diagrama em escada”. Este método foi um dos primeiros a ser
implementado e é fortemente utilizado, devido à sua parecença com os robustos métodos utilizados
em protecções, os quais tem provas dadas à vários anos. No entanto, com a introdução de novas
funcionalidades e complexidade das aplicações, este foi ultrapassado por métodos que permitem a
criação de ordens não sequenciais, despertadas por condições na execução do programa.
Function Block Diagram (FBD) – A função de automação é construída com base numa rede
utilizando símbolos gráficos com funções pré-definidas. O programador define a troca de dados entre
os diferentes símbolos gráficos e as prioridades que estes têm durante a execução do programa. Este
método introduz o método de ligação entre os símbolos - connector - que permite a ligação sem a
existência de fios e entre vários blocos a partir do mesmo ponto.
Sequential Function Chart (SFC) – Esta linguagem permite desmantelar tarefas complexas
em unidades projectáveis para supervisionar a informação entre diferentes redes. São introduzidos
dois conceitos fundamentais: Transições – que representam condições para activar determinadas
Acções – que executam ordens que são repercutidas para outro nível ou para sequências parciais
ligadas sequencialmente, em paralelo ou em outro modo alternativo.
24
4. Função de Regulação Automática de Tensão
4.1 Especificações
O desenvolvimento do software da função de regulação automática de tensão é feito de acordo
com as exigências do explorador da rede e os métodos expostos ao longo deste trabalho. Como tal,
apresentam-se na tabela 4.1 as especificações que serviram de base ao projecto do seu algoritmo e
à criação dos seus blocos.
Característica
Capítulo
Descrição
2.3
A tensão do barramento é permanentemente comparada com um valor de
referência e é calculado o desvio actual de tensão.
Se o desvio admissível for excedido durante um tempo pré-fixado, será
emitida uma ordem de “subir” ou de “descer” aos dispositivos de comando
dos comutadores de tomadas em serviço dos transformadores do
barramento em questão
Condições Iniciais
4.2
Para que a função “regulação de tensão” possa operar sobre os
mecanismos de comando dos comutadores de tomadas em serviço de
cada um dos transformadores, devem verificar-se cumulativamente as
condições apresentadas na tabela 4.2
Regimes de
funcionamento
2.3.1
Existência de dois regimes de funcionamento distintos:
• Modo “Automático”
• Modo “Manual”
Configuração da
subestação
2.3.2
Cálculo da topologia actual a partir da base de dados representativa da
subestação e das informações sobre a posição de disjuntores e
seccionadores
Módulo Base
Controlo do funcionamento de transformadores em paralelo, mediante a
minimização da circulação de potência reactiva
Comando de
transformadores em
paralelo
2.3.3
Compensação da
queda de tensão
2.3.4
Regulação da tensão no extremo a jusante do ponto onde é efectuada a
medida
Comando de
baterias de
condensadores
2.3.5
Evita a passagem do valor máximo admissível da tensão devido à subida
provocada pela ligação da bateria
Interacção com as
funções
“deslastre/reposição
por tensão”
2.3.6
Garante a manutenção do valor máximo admissível da tensão, devido à
diminuição da carga provocada pela acção dos respectivos programas de
“deslastre”.
Sinalizações
2.3.8
Emissão de sinalizações para cada painel de transformadores, de acordo
com a tabela 2.3.
Controlo de
execução das
ordens
2.3.7
Após a emissão de uma ordem de subir ou de descer ao comutador de
tomadas de um transformador, a função deverá verificar se alteração foi
bem sucedida
Actuação com total independência entre os transformadores em paralelo.
A parametrização da função em cada barramento poderá ser diferente em
funcionamento individual, mas em paralelo deverá ser garantida a mesma
parametrização da função nos transformadores do grupo
Tabela 4.1 – Resumo das especificações da função “AVR”
25
4.2 Algoritmo
De acordo com as especificações apresentadas no ponto anterior e as características da
ferramenta de desenvolvimento utilizada, foi criada uma estrutura constituída por três grupos para
desenvolver a função. Estes são descritos nos pontos seguintes e por sua vez serviram de base á
construção do fluxograma da figura 4.1.
Arranque da função
No arranque do autómato o regime de funcionamento é o “manual” consequentemente a
regulação automática está inibida. Apesar desta inibição a função deverá adquirir os diferentes
valores do exterior e verificar o seu valor lógico, emitindo uma sinalização sempre que as condições
presentes na tabela 4.2 não sejam cumpridas.
Dispositivo
Barramento(s)
Sinalização
Descrição
SNL_01
O regime de funcionamento escolhido para o barramento em questão é
o modo “automático”
SNL_07
O encravamento por “mínimo de tensão” não está activado
-
A medida da tensão do barramento em questão é válida
-
O transformador em questão está “em serviço” (ligado aos barramentos
AT e MT)
-
As tensões auxiliares alternada e contínua dos circuitos de comutação
de tomadas em serviço estão presentes
-
A tensão auxiliar do dispositivo de comando do comutador de tomadas
em serviço está presente
Transformador(es)
SNL_12
O dispositivo de comando do comutador de tomadas em serviço está
operacional, ou seja, não está avariado
-
As medidas de potência activa e potência reactiva são válidas
-
A indicação de posição do comutador de tomadas em serviço é válida
Tabela 4.2 – Condições de arranque da função
A tabela anterior apresenta as condições que devem ser cumulativamente cumpridas para que
a regulação automática possa operar em relação a cada um dos barramentos de média tensão e
sobre os mecanismos de comando dos comutadores de tomadas em serviço de cada um dos
transformadores.
Elaboração das ordens
Verificadas as condições iniciais, o desvio é calculado ciclicamente para os transformadores
ligados ao barramento. O cálculo é feito de acordo com a configuração da subestação e as opções
seleccionadas, estando disponíveis as seguintes funcionalidades:
26
•
Módulo base - A tensão do barramento é permanentemente comparada com um valor de
referência, calculando assim o desvio actual.
•
Comando de baterias de condensadores – O valor base é reduzido um valor pré-
definido em percentagem mediante a ordem de ligação da bateria de condensadores ao
barramento do transformador.
•
Compensação da queda de tensão em linha – O cálculo do desvio considera a queda
de tensão em linha, caso esta opção seja activada pelo utilizador e o transformador não esteja
a funcionar em paralelo.
•
Minimização da corrente reactiva de circulação – Se o transformador estiver a
funcionar em paralelo e o método de regulação com minimização de corrente estiver activo, os
cálculos são efectuados de forma a considerar a minimização do valor de corrente de
circulação.
Se a característica de “tempo-desvio” for “tempo independente”, a duração dos ciclos é sempre
igual ao tempo de actuação pré-fixado, caso seja “tempo inverso”, a duração do ciclo é encurtada, ou
seja, a frequência das leituras é aumentada, na dependência inversa da razão entre o primeiro desvio
calculado e o desvio admissível nominal.
Se o valor do desvio calculado num determinado ciclo não exceder o desvio admissível nominal
não é elaborada qualquer ordem, por sua vez se o valor do desvio calculado exceder o desvio
admissível nominal será elaborada uma ordem que dependerá do sinal do desvio calculado:
•
Desvio positivo – É elaborada uma ordem de descer ao comutador de tomadas em
serviço do respectivo transformador.
•
Desvio negativo – É elaborada uma ordem de subir ao comutador de tomada em serviço
do respectivo transformador.
Emissão e controlo de ordens
Uma vez elaborada uma ordem de “descer” ou de “subir” ao comutador de tomadas em serviço
de um transformador, a mesma só é emitida se não estiver em curso uma manobra de mudança de
tomadas; caso contrário, a emissão da ordem aguarda o fim da mudança em curso. Adicionalmente,
uma ordem de “descer/subir” ao comutador de tomadas em serviço de um transformador só é emitida
se o comutador não estiver na tomada extrema inferior/superior; caso isso se verifique, a ordem é
cancelada sendo emitida a respectiva sinalização.
Após a emissão de uma ordem de subir ou de descer ao comutador de tomadas em serviço de
um transformador, a função aguarda um período de tempo pré-fixado e ajustável entre 1 s e 50 s
(correspondente à duração da mudança de tomada), findo o qual verifica se o comutador
efectivamente mudou de tomada no sentido correcto. Se a mudança de tomada não tiver sido
correctamente efectuada, a função fica bloqueada em relação ao transformador em questão, e será
emitida a sinalização “avaria do dispositivo de comando do comutador de tomadas em serviço –
ordem não cumprida”.
27
Figura 4.1 – Fluxograma do funcionamento da função “AVR”
28
4.3 Toolbox II – Configuração do projecto
4.3.1 Estrutura base
A criação de novas funcionalidades de automação na ferramenta Toolbox II implica a definição
de uma estrutura funcional de acordo com o hardware disponível (capítulo 3.3.2). A configuração
inicial deste projecto da ferramenta OPM II é feita de acordo com os parâmetros presentes na tabela
4.3, permitindo assim aceder e desenvolver a funcionalidade de regulação automática na ferramenta
CAEx Plus.
Nível
Descrição
Id
Atribuição
1
Customer Project
0
SIEMENS
2
Process Technical Plant
0
Desenvolvimento SIEMENS
3
System Technical Plant
0
Indulis
4
Region
0
Laboratório
5
Automation Unit
0
AK1703ACP
Tabela 4.3 – Toolbox II – Estrutura funcional da função “AVR”
A criação desta estrutura permite agora definir o hardware instalado no autómato AK1703ACP
(capítulo 4.3.2) e posteriormente as variáveis que a função necessita de conhecer do exterior
(capítulo 4.3.3).
4.3.2 Hardware instalado
Apresentam-se agora as características dos diferentes componentes instalados na unidade
utilizada para desenvolver a função de regulação automática de tensão:
•
Rack de montagem CM-2835 – Apresenta 17 slots para cartas e 4 slots para alimentação e
pode ser instalado em painéis de 19’’;
•
Master Control Element CP-2010;
•
Carta de Ligação CM-2837 Connect. Comm./Sys-I/O (CP-2010);
•
Network Interface Processor (NIP) SM-2556 - Ser.Interface+Ethernet 10/100FX
•
Peripheral Elements AI-2300 - Analogic Input 16x ±20mA + 4x opt.IOM - BA2-300
•
Peripheral Elements DI-2111 - Digital Input 8x8, 110/220VDC, 1ms - BA2-111
•
Peripheral Elements DO-2210 - Command Output 24-60VDC - BA2-210
•
Power Supply 110-220VDC,230VAC/80W BC5-622.
29
4.3.3 Estrutura de variáveis exteriores
A gestão de variáveis exteriores ao autómato onde é executada a função “AVR” é feita na
ferramenta OPM II através da criação de images – imagens que representam a estrutura presente na
subestação de forma hierárquica. Da análise do conjunto de variáveis utilizadas na função, que
trocam informação com o exterior, resultou a estrutura da figura 4.2 constituída por 4 níveis com as
seguintes características:
•
Nível 0 – AVR – Automatic Voltage Regulator – É o primeiro nível da estrutura, criado
para englobar todas as images necessárias para a execução e configuração da função.
•
Nível 1 – Constituído pelas images que englobam as variáveis de acordo com o elemento
que se referem:
S01 – Dados relativos à subestação;
T01/ T02/ T03/ T04/ T05 – Dados relativos aos transformadores;
G01/ G02 – Dados dos grupos de regulação em paralelo.
•
Nível 2 – Images que englobam as diferentes variáveis de acordo com a sua origem:
MSR – Medições provenientes do exterior do autómato;
PRM – Parametrizações definidas pelos utilizadores;
ORD – Ordens ou comando das diferentes funções em execução na subestação;
SNL – Sinalizações que a função deve emitir.
•
Nível 3 – Images com o nome das variáveis e que contém os links para os diferentes
periféricos. Este nível não é representado na figura 4.2 uma vez que estas diferem de acordo
com o seu grupo, sendo apresentadas nas tabelas 4.4 à 4.8.
Figura 4.2 – ToolBox II – Estrutura de variáveis exteriores
A base da estrutura de variáveis exteriores é constituída por links para os diversos periféricos
com os quais a variável deve contactar – aparelhos de medições, dispositivos de comunicações,
ferramenta de programação – garantindo assim o input/output de valores de acordo com as suas
características e estrutura presente na subestação. No desenvolvimento da função são utilizados os
seguintes tipos de links:
30
•
LNK_CAExplus – Link de comunicação com a ferramenta de desenvolvimento/ gestão de
funções de automação, permitindo assim carregar a função com as variáveis exteriores.
•
LNK_1703_AI – Link para a carta de entradas analógicas da família de produtos 1703 –
modelo do autómato utilizado.
•
LNK_1703_DI – Link para a carta de entradas digitais da família de produtos 1703.
•
LNK_1703_DO – Link para a carta de saídas digitais da família de produtos 1703.
O primeiro grupo de variáveis apresentado é referente ao estado das ligações na subestação –
tabela 4.4. A estrutura presente na tabela foi criada de acordo com a figura 4.5, na qual estão
representadas as ligações de interesse da subestação. As variáveis listadas têm características
booleanas representando a posição dos diferentes disjuntores ou seccionadores.
A obtenção do valor da variável pode ser feito por leitura directa do estado do disjuntor (aberto
ou fechado) ou através da comunicação com o autómato de serviços auxiliares da subestação, sendo
assim atribuídos os respectivos links presentes na tabela.
S01 – MSR
Codificação
Descrição
B01_CON_T01_T02
Estado do disjuntor que permite a ligação do
transformador 1 ao transformador 2 pelo barramento 1
B01_CON_T02_T03
Estado do disjuntor que permite a ligação do
transformador 2 ao transformador 3 pelo barramento 1
B01_CON_T03_T04
Estado do disjuntor que permite a ligação do
transformador 3 ao transformador 4 pelo barramento 1
B01_CON_T04_T05
Estado do disjuntor que permite a ligação do
transformador 4 ao transformador 5 pelo barramento 1
B02_CON_T01_T02
Estado do disjuntor que permite a ligação do
transformador 1 ao transformador 2 pelo barramento 2
B02_CON_T02_T03
Estado do disjuntor que permite a ligação do
transformador 2 ao transformador 3 pelo barramento 2
B02_CON_T03_T04
Estado do disjuntor que permite a ligação do
transformador 3 ao transformador 4 pelo barramento 2
B02_CON_T04_T05
Estado do disjuntor que permite a ligação do
transformador 4 ao transformador 5 pelo barramento 2
Tipo
Links
BOOL
LNK_CAExplus
+
LNK_1703_DI
Tabela 4.4 – Estrutura de variáveis exteriores dos estados das ligações na subestação
31
Na tabela 4.5 são apresentadas todas as medições relativas aos transformadores. Este
conjunto de valores é de extrema importância para a correcta execução da função “AVR”, uma vez
que permite receber dados como a tensão aos terminais do transformador – objectivo da regulação.
Os valores podem ser recebidos através das: cartas de entrada; ligação aos diferentes
dispositivos (TT’s, TI’s e comutador) ou do autómato de serviços auxiliares - comunicações.
T01/ T02/ T03/ T04/ T05 – MSR
Codificação
Descrição
001_VLT_ABS
Tensão eficaz aos terminais do transformador
002_CRT_ABS
Corrente medida no ramo do transformador
003_CRT_REL
Componente activa da corrente medida no ramo do
transformador
004_CRT_IMG
Componente reactiva da corrente medida no ramo do
transformador
005_PWR_ABS
Potência aparente entregue pelo transformador
006_PWR_REL
Componente activa da potência entregue pelo transformador
007_PWR_IMG
Componente reactiva da potência entregue pelo
transformador
008_PWR_AGL
Ângulo de potência
010_SVR
Bit que permite identificar a existência do transformador na
subestação
011_CON_B01
Ligação do seccionador ao barramento 1
012_CON_B02
Ligação do seccionador ao barramento 2
020_TAP_MAX
Indicação de tomada máxima enviada pelo comutador de
tomadas
021_TAP_MIN
Indicação de tomada mínima enviada pelo comutador de
tomadas
022_TAP_ALT
Indicação de alteração de tomada enviada pelo comutador
de tomadas
023_TAP_P01
Bit 1 da codificação da posição da tomada
024_TAP_P02
Bit 2 da codificação da posição da tomada
025_TAP_P03
Bit 3 da codificação da posição da tomada
026_TAP_P04
Bit 4 da codificação da posição da tomada
027_TAP_P05
Bit 5 da codificação da posição da tomada
028_TAP_P06
Bit 6 da codificação da posição da tomada
029_TAP_P07
Bit 7 da codificação da posição da tomada
Tipo
Links
REAL
LNK_CAExplus
+
LNK_1703_AI
BOOL
LNK_CAExplus
+
LNK_1703_DI
Tabela 4.5 – Estrutura de variáveis exteriores relativas às medições nos transformadores
32
Actualmente a parametrização da função é feita através da alteração dos parâmetros da tabela
4.6 na instância “AVR”, os quais apresentam por defeito os valores da última coluna. No entanto, no
capítulo 6.1 deste trabalho é sugerido um menu de configuração desenhado para o efeito –
executado no autómato de serviços auxiliares da subestação ou remotamente no centro de comando
– que deverá comunicar com a função através da carta de comunicações, permitindo assim alterar
todas as parametrizações remotamente, sendo por isso necessário a sua configuração na ferramenta
OPM II.
T01/T02/T03/T04/T05 – PRM
Codificação
Tipo
Descrição
Valores
0 – Manual (Default)
001_WMD
BOOL
Regime de funcionamento
002_VLT_UNT
BOOL
Definição da unidade dos valores da tensão
003_CRT_UNT
BOOL
Definição da unidade dos valores da
corrente
0 – [A] (Default)
004_PWR_UNT
BOOL
Definição da unidade dos valores de
potência
0 – [kVA]
1 – [MVA] (Default)
005_VLT_REF
REAL
Tensão de referência
[V] / [kV], de acordo com
002_VLT_UNT
006_CRT_REF
REAL
Corrente referência
[A] / [kA] de acordo com
003_CRT_UNT
007_BDW
REAL
Banda admissível
3 % (Default)
008_TME_MDE
BOOL
Tipo de delay quando o valor da tensão
admissível é ultrapassado
0 – Tempo Linear (Default)
009_TME_VLE
INT
010_CPC_DVI
1 – Automático
0 – [V]
1 – [kV] (Default)
1 – [kA]
1 – Tempo Inverso
Tempo que a função aguarda quando o
valor da tensão admissível é ultrapassado e
o tipo de delay é “Tempo Linear”
10 s (Default)
REAL
Desvio da tensão de referência com a
ligação da bateria de condensadores
10 % (Default)
011_LDC_ENB
BOOL
Compensação de tensão na linha
012_LDC_NTR
REAL
Parâmetro da compensação de tensão
referente à resistência da linha
[ohm]
013_LDC_NTX
REAL
Parâmetro da compensação de tensão
referente à reatância da linha
[ohm]
014_MDE
BOOL
Modo de recepção de valores do exterior
015_TT_PRI
REAL
Valor do primário do TT
[kV]
016_TT_SCD
REAL
Valor do secundário do TT
[V]
017_TI_PRI
REAL
Valor do primário do TI
[A]
018_TI_SCD
REAL
Valor do secundário do TI
[A]
0 – OFF (Default)
1 – ON
0 – Medições (Default)
1 - Comunicações
33
020_VLT_MIN_ENB
BOOL
Configuração da funcionalidade de
“Bloqueio por Mínimo de Tensão”
0 – OFF
1 – ON (Default)
021_VLT_MIN_MDE
BOOL
Formato do valor minimo de tensão
admissivel
0 – [%] (Default)
022_VLT_MIN_VLE
REAL
Valor minimo de tensão admissivel
023_VLT_MIN_TME
INT
Tempo que a função aguarda até activar o
bloqueio por minimo de tensão
2 s (Default)
024_VLT_MIN_SNL
BOOL
Configuração da emissão da sinalização de
“Bloqueio por Mínimo de Tensão”
0 – OFF
1 – ON (Default)
025_VLT_MAX_ENB
BOOL
Configuração da funcionalidade “Máximo
Tensão”
0 – OFF
1 – ON (Default)
026_VLT_MAX_MDE
BOOL
Formato do valor máximo de tensão
admissivel
0 – [%] (Default)
027_VLT_MAX_VLE
REAL
Valor limite para máximo de tensão
admissivel
028_VLT_MIN_TME
INT
Tempo que a função aguarda até activar o
bloqueio por máximo de tensão
2 s (Default)
029_VLT_MIN_SNL
BOOL
Configuração da emissão da sinalização de
“Bloqueio por Máximo de Tensão”
0 – OFF
1 – ON (Default)
030_CRT_MAX_ENB
BOOL
Configuração da funcionalidade de “Máximo
de corrente”
0 – OFF
1 – ON (Default)
031_CRT_MAX_MDE
BOOL
Formato do valor máximo de corrente
admissivel
0 – [%] (Default)
032_CRT_MAX_VLE
REAL
Valor do máximo de corrente admissivel
Depende do parâmetro
031_PRM_CRT_MAX_MDE
033_CRT_MAX_TME
INT
Tempo que a função aguarda até activar o
bloqueio “Máximo de Corrente”
2 s (Default)
034_CRT_MAX_SNL
BOOL
Configuração da emissão da sinalização de
“Máximo de Corrente”
0 – OFF
1 – ON (Default)
040_ZCC
REAL
Impedância de curto circuito do
transformador
[ohm]
1 – [V] / [kV]
Depende do parâmetro
021_VLT_MIN_MDE
1 – [V] / [kV]
Depende do parâmetro
026_PRM_VLT_MAX_MDE
1 – [A] / [kA]
041_TME_CMT
INT
Tempo de comutação
50 s (Default)
042_TME_IMP
INT
Tempo de duração do impulso das ordens
para o comutador
5 s (Default)
043_VLT_LMT
REAL
Valor em relação à tensão de referência,
abaixo do qual a regulação automática fica
inibida
30% (Default)
044_TAP_REF_ENB
BOOL
Indicação da disponibilidade da tomada de
referência
0 – OFF
1 – ON (Default)
045_TAP_REF_VLE
INT
Tomada de referência do comutador de
tomadas
2 (Default)
046_TAP_MDE
BOOL
Tipo de codificação da posição da tomada
usada pelo comutador
0 – BCD (Default)
1–
Tabela 4.6 – Estrutura de variáveis de parametrização dos transformadores
34
O próximo grupo apresentado é referente às ordens associadas aos transformadores. A lista
destas variáveis é fornecida na tabela 4.7, as quais podem ser de dois tipos:
•
Ordens emitidas pela função – Como as ordens de subir ou descer para o comutador de
tomadas;
•
Ordens recebidas pela função – Permitindo que esta interaja com outras funções na
subestação como as funções de deslastre.
T01/T02/T03/T04/T05 - ORD
Codificação
Tipo
Links
Descrição
001_OUT_UPR
Output
Ordem de subir para o comutador de tomadas
002_OUT_DWN
Output
Ordem de descer para o comutador de tomadas
LNK_CAExplus
003_OUT_CPC
Output
004_CRT_CIR
Output
Ordem enviada pela função “AVR”para a função “Comando
de baterias de condensadores” permitindo o fecho do
disjuntor da bateria de condensadores
+
LNK_1703_DO
Ordem de disparo do disjuntor de barras por corrente de
circulação
011_IN_UPR_MAN
Input
Ordem manual para subir
012_IN_DWN_MAN
Input
Ordem manual para descer
013_IN_CPC
Input
Ordem recebida da função “Comando de bateria de
condensadores”, com a indicação de ligação da bateria
LNK_CAExplus
LNK_1703_DI
014_IN_DRT
Input
Ordem recebida da função de “Deslastre por reposição de
tensão”
015_IN_DRF
Input
Ordem recebida da função de “Deslastre por reposição de
frequência”
+
Tabela 4.7 – Lista de ordens enviadas/recebidas pelos transformadores
35
O último grupo de images do nível 2, da estrutura de variáveis exteriores dos transformadores
é constituído pelas sinalizações que a função deve emitir. A lista de sinalizações disponíveis é
apresentada na tabela 4.8, a qual foi construída de acordo com a tabela 2.3 onde constam todas as
sinalizações exigidas pelo explorador da rede.
Em termos de comunicações com o exterior estas podem ser feitas de duas formas:
•
Carta de saídas digitais – Emite um sinal binário sempre que uma sinalização for
activada e uma sinalização luminosa na respectiva carta, referente ao id da saída onde a
variável está ligada;
•
Carta de comunicação – Emissão da sinalização por protocolo de comunicação, para o
autómato de serviços centrais ou para um centro de comando.
T01/ T02/ T03/ T04/ T05 - SNL
Codificação
Descrição
Valores
0 – Manual (Default)
001_WMD
Modo de funcionamento
002_VLT_REF_DVI
Tensão de base reduzida x %
003_CPC
Tensão de base reduzida com vista à ligação de baterias de
condensadores
004_TME_MDE
Tempo desvio
005_UPR
Ordem de subir
006_DWN
Ordem de descer
007_VLT_MIN_SNL
Bloqueio por mínimo de tensão
008_CRT_CIR_SNL
Excesso de circulação de potência reactiva entre
transformadores em paralelo
009_VLT_MAX_SNL
Máximo de tensão
010_TAP_MIN
Indicação de “Topo inferior” quando o comutador se encontra
na tomada inferior e a função elabora uma ordem de descer
1 – ON
011_TAP_MAX
Indicação de “Topo superior” quando o comutador se
encontra na tomada superior elaborauma ordem de subir
1 – ON
12_ONA
Avaria do dispositivo de comando do comutador de tomadas
em serviço - ordem não cumprida
13_CRT_CIR_ALR
Alarme de corrente de circulação
14_CRT_CIR_ORD
Ordem de disparo por corrente de circulação
15_TAP_REF
Tomada de referência em serviço / fora de serviço
1 - Automático
0 – OFF (Default)
1 – ON
0 – Linear (Default)
1 - Inverso
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
0 – OFF (Default)
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – Em serviço
(Default)
1 – Fora de serviço
Tabela 4.8 – Lista de sinalizações dos transformadores
36
Relativamente aos grupos de transformação, existem dois tipos de variáveis que deverão ser
consideradas. Em primeira instância as medições na subestação relativas aos valores de potência do
grupo de transformação, quando existem instrumentos de medição à saída do grupo. Estes valores
permitem uma obtenção mais correcta dos parâmetros aos terminais do grupo fundamental para a
regulação em paralelo. Os valores considerados são apresentados na tabela 4.9.
G01/ G02 – MSR
Codificação
Descrição
001_VLT_ABS
Tensão eficaz aos terminais do grupo de transformação
002_CRT_ABS
Corrente medida à saída do grupo
003_CRT_REL
Componente activa da corrente medida à saída do grupo
004_CRT_IMG
Componente reactiva da corrente medida à saída do grupo
005_PWR_ABS
Potência aparente entregue pelo grupo de transformação
006_PWR_REL
Componente activa da potência entregue pelo grupo
007_PWR_IMG
Componente reactiva da potência entregue pelo grupo
008_PWR_AGL
Ângulo de potência
Tipo
Links
REAL
LNK_CAExplus
+
LNK_1703_AI
Tabela 4.9 – Estrutura de variáveis exteriores relativas às medições dos grupos de transformação
O segundo grupo de valores está relacionado com as variáveis de parametrização da função
que podem ser diferentes para cada grupo. O conjunto destas variáveis é em tudo semelhante às
apresentadas na tabela 4.7, relativa à configuração dos transformadores, com as diferenças
apresentadas na tabela 4.10.
G01/ G02 – PRM
Codificação
Tipo
Descrição
Valores
Todos os parâmetros apresentados relativamente aos transformadores na tabela 4.7
050_PRL_MTD
BOOL
Método de regulação em paralelo
0 – Minimização de
correntes reactivas
(Default)
1 – Master / Follower
051_PRL_MST
INT
Definição do master para o método: Master/
Follower
1 (Default)
052_CRT_CIR_ENB
BOOL
Configuração da funcionalidade de verificação
da corrente de circulação
0 – OFF
1 – ON (Default)
053_CRT_CIR_MDE
BOOL
Formato do valor máximo de corrente
admissivel
0 – [%] (Default)
054_CRT_CIR_VLE
REAL
Valor do máximo de corrente admissivel
Depende do parâmetro
053_PRM_CRT_CIR_MDE
055_CRT_CIR_TME
INT
Tempo que a função aguarda até emitir a
ordem de abertura do disjuntor
10 s (Default)
056_CRT_CIR_SNL
BOOL
Configuração da emissão da sinalização de
corrente de circulação
0 – OFF
1 – ON (Default)
1 – [A] / [kA]
Tabela 4.10 – Estrutura de variáveis de parametrização dos grupos de transformação
37
4.3.4 Endereçamento de variáveis
As images das variáveis externas apresentadas no capítulo anterior têm associadas diferentes
formas de comunicar com o exterior de acordo com o link atribuído. A possibilidade de comunicação
com diferentes links implica a existência de um endereçamento único interno para cada variável.
O endereçamento é constituído por 5 parâmetros obrigatórios, para os quais foram criados
macros de atribuição automática de acordo com as seguintes condições:
•
CASDU1 - 8 bits - Atribui sempre o valor 0;
•
CASDU2 - 8 bits - É atribuído sempre o valor 0;
•
IOA1 - 8 bits - Associado ao “nível1” das images da função. A codificação é atribuída de
acordo com o nome do nível em questão, através da macro:
IF(LEFT(GETNAME(4),1)="S",0,
IF(LEFT(GETNAME(4),1)="T",10,
IF(LEFT(GETNAME(4),1)="G",20,30))) + VALUE(RIGHT(GETNAME(4),1))
•
IOA2 - 8 bits – Este parâmetro é atribuído de acordo com o “nível2”, através de
comparação directa, efectuada pela macro:
IF((GETNAME(3))="MSR",1,
IF((GETNAME(3))="PRM",2,
IF((GETNAME(3))="ORD",3,
IF((GETNAME(3))="SNL",4,5)))
•
IOA3 - 8 bits – Este parâmetro está associado ao “nível3”, no qual o número de imagens a
considerar é bastante superior aos anteriores, não existindo um padrão entre elas, como tal
optou-se por atribuir a codificação no próprio nome da imagem e a macro de atribuição do
IOA3, apenas tem de recolher o id presente no inicio do nome do respectivo nível:
LEFT(GETNAME(2),2)
Verifica-se assim, que não existe uma atribuição sequencial do endereço das variáveis, mas
uma distribuição de acordo com as suas características resumida na tabela 4.11.
Nível
Nível 1
Codificação
IOA1
IOA2
IOA3
Sx
0+id
-
-
Tx
10+id
-
-
Gx
20+id
-
-
MSR
-
1
-
PRM
-
2
-
ORD
-
3
-
SNL
-
4
-
Todas as
variáveis
-
-
Leitura do id presente no início do nome da
variável
Nível 2
Nível 3
Tabela 4.11 – Resumo do endereçamento de variáveis exteriores
38
4.4 Programação da função
4.4.1 Atribuição de nomes
A dimensão e complexidade da função desenvolvida levantam problemas na gestão de
variáveis e ligações entre os diferentes blocos. Consequentemente foi criado um formato standard na
atribuição de nomes de acordo com a estrutura de variáveis exteriores do capítulo 4.3.3, garantindo
assim organização, fácil leitura das variáveis e ligações.
A estrutura criada está representada na figura 4.3, a qual resulta da concatenação dos
diferentes níveis da estrutura de variáveis exteriores.
Figura 4.3 – Atribuição de nomes aos parâmetros
•
Parâmetro_1 – Associado ao “Nível1” da estrutura de variáveis exteriores. Existe apenas
no nome das variáveis, identificando o elemento a que esta se refere – transformadores,
grupos de regulação em paralelo ou elementos da subestação. Este parâmetro revela-se de
extrema utilidade, uma vez que permite distinguir as variáveis comuns entre os
transformadores.
•
Parâmetro_2 – Associado ao “Nível2” da estrutura de variáveis exteriores. Este parâmetro
é comum às variáveis e ligações nos blocos identificando a sua origem. As variáveis
provenientes do exterior do autómato (MSR – Mesaures) são sujeitas a verificações internas,
mantendo o seu valor original, isto implica a necessidade de criação de uma nova etiqueta
neste nível (CAL – Calculations) em relação à estrutura de variáveis exteriores, que permite
distinguir as diferentes fases das variáveis no decorrer da função;
•
Parâmetro_3 – Associado ao “Nível3” da estrutura de variáveis exteriores. Este parâmetro
é também comum às variáveis e ligações dos blocos e os seus valores são semelhantes aos
apresentados nas tabelas do capítulo anterior, sem o id inicial.
4.4.2 Instância “AVR”
A função de regulação automática de tensão é desenvolvida na instância “AVR” (Automatic
Voltage Regulator), que em conjunto com a estrutura de variáveis externas – capítulo 4.3.3 – permite
que esta seja executada em qualquer subestação que tenha o autómato instalado.
A instância “AVR” é constituída por diferentes blocos de funções os quais estão organizados
por 4 zonas de funcionamento representadas no anexo 2. Estas zonas foram criadas de acordo com
as fases da função apresentadas no capítulo 4.1.1, de forma a responder às exigências de maneira
intuitiva e estruturada.
39
4.4.3 Configuração da subestação
Alterações nos elementos de corte e seccionamento da subestação podem modificar a forma
desta entregar energia colocando/retirando de serviço transformadores ou permitir/desfazer o seu
paralelo. Nos capítulos 2.3.2 e 2.3.3 verificou-se como o método de cálculo usado na regulação é
influenciado por estas alterações, sendo por isso necessário identificá-las antes da sua execução.
A função “AVR” permite detectar alterações na configuração da subestação de acordo com as
informações das posições dos diferentes seccionadores e disjuntores presentes na sua base de
dados. A complexidade desta sub-função está associada ao elevado número de variáveis que devem
ser consideradas para uma subestação em que estejam instalados o número máximo de 5
transformadores e duas baterias de condensadores.
Na figura 4.4, está representado o esquema que serviu de base para o desenvolvimento desta
funcionalidade, o qual considera todas as possibilidades de ligação numa subestação com a
configuração máxima de transformadores a funcionar em paralelo.
Figura 4.4 – Configuração máxima das subestações
A análise de todos os parâmetros da figura 4.4 é efectuada pelo bloco “BLC1.0_STN”, que
recebe a informação dos diferentes estados da base de dados da subestação e calcula em cada ciclo
a sua configuração actual. Adicionalmente, o bloco também recebe a informação de ligação de
baterias de condensadores e dos programas de deslastre, permitindo assim identificar quais os
transformadores que deverão ser alvo destes programas.
A comunicação interna da configuração da subestação é feita através da codificação
desenhada para uma subestação com 5 transformadores presente na tabela 4.12. Esta foi construída
de acordo com todas as combinações possíveis para cada transformador – isto significa que a
codificação é atribuída ao transformador e não à subestação.
Uma vez que configuração da subestação influencia o método de cálculo utilizado, este bloco
ocupa a primeira posição na instancia “AVR”, o que de acordo com as características de varrimento
do compilador é o primeiro a ser calculado, detectando assim uma alteração na estrutura da
subestação antes dos restantes cálculos.
40
Bloco “BLC1.1_STN”
O bloco “BLC1.1_STN”, representado na figura 4.5 recebe as
variáveis booleanas relativas aos estados dos seccionadores e
disjuntores
da
subestação,
verificando
assim
se
o(s)
transformador(es) se encontra(m) em serviço - ligado a algum dos
barramentos - e codifica internamente a configuração de cada
transformador de acordo com a tabela 4.12.
A posição de um disjuntor ou seccionador é codificada
apenas por um bit, no qual o valor “0” representa o estado/posição
aberto e o valor “1” o estado/posição fechado. Perante os valores
de entrada o bloco retorna duas saídas por transformador, que
representam
o
funcionamento
do
transformador
e
a
sua
configuração.
Por defeito os valores das ligações do bloco têm o seu
estado lógico a “0”, admitindo assim que não existe qualquer
ligação antes de qualquer configuração/leitura dos valores da
configuração da subestação. Esta característica permite que o
bloco funcione independentemente do número de transformadores
da subestação, uma vez que perante a ausência de algum dos
valores o bloco retorna que os transformadores não estão em
serviço.
Não existe nenhuma restrição na ordem de ligação dos
Figura 4.5 – Bloco “BLC1.1_STN”
transformadores, sendo possível o funcionamento “individual” de um transformador em qualquer uma
das 5 posições possíveis.
Código
Transformador 1
Transformador 2
Transformador 3
Transformador 4
Transformador 5
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
T1
T1//T2
T1//T3
T1//T4
T1//T5
T1//T2//T3
T1//T2//T4
T1//T2//T5
T1//T3//T4
T1//T3//T5
T1//T4//T5
T1//T2//T3//T4
T1//T2//T3//T5
T1//T2//T4//T5
T1//T3//T4//T5
T2
T2//T1
T2//T3
T2//T4
T2//T5
T2//T1//T3
T2//T1//T4
T2//T1//T5
T2//T3//T4
T2//T3//T5
T2//T4//T5
T1//T2//T3//T4
T1//T2//T3//T5
T1//T2//T4//T5
T2//T3//T4//T5
T3
T3//T1
T3//T2
T3//T4
T3//T5
T3//T1//T2
T3//T1//T4
T3//T1//T5
T3//T2//T4
T3//T2//T5
T3//T4//T5
T3//T1//T2//T4
T3//T1//T2//T5
T3//T1//T4//T5
T3//T2//T4//T5
T4
T4//T1
T4//T2
T4//T3
T4//T5
T4//T1//T2
T4//T1//T3
T4//T1//T5
T4//T2//T1
T4//T2//T3
T4//T2//T5
T4//T1//T2//T3
T4//T1//T2//T5
T4//T1//T3//T5
T4//T2//T3//T5
T5
T5//T1
T5//T2
T5//T3
T5//T4
T5//T1//T2
T5//T1//T3
T5//T1//T4
T5//T2//T3
T5//T2//T4
T5//T3//T4
T5//T1//T2//T3
T5//T1//T2//T4
T5//T1//T3//T4
T5//T2//T3//T4
15
T1//T2//T3//T4//T5
T1//T2//T3//T4//T5
T1//T2//T3//T4//T5
T1//T2//T3//T4//T5
T1//T2//T3//T4//T5
Tabela 4.12 – Codificação das configurações dos transformadores
41
O bloco é ainda dotado de lógica para reconhecer configurações em paralelo não sequenciais
(por exemplo T1//T3 ou T2//T4//T5), para além desta situação não ser habitual no planeamento de
funcionamento da subestação, estas podem surgir de forma não programada pela retirada de serviço
de algum transformador através da abertura do disjuntor de ligação do transformador, ou seja,
estando T1//T2//T3, caso o transformador T2 seja retirado de serviço, o grupo passa a operar apenas
com os transformadores 1 e 3.
Descrição das Ligações
As tabelas 4.13 e 4.14, contém as descrições das diferentes ligações do bloco “BLC1.1_ STN”
e os respectivos valores por elas assumidos.
Tipo
Input
Descrição
Tx_MSR_SRV
BOOL Ligação do transformador X
Tx_MSR_CON_BY
BOOL
S01_MSR_Bx_CON_TY_TZ BOOL
Valor
Estado do seccionador de ligação do
transformador X ao barramento Y
Seccionador do barramento X que permite a
ligação do transformador Y e transformador Z
Cx_MSR_SRV
BOOL
Ordem de ligação da bateria de condensadores
X
Cx_MSR_CON_BY
BOOL
Estado do seccionador de ligação da bateria de
condensadores X ao barramento Y
S01_ORD_DES_VLT
BOOL
Ordem de deslastre/ reposição por tensão da
subestação
S01_ORD_DES_VLT_BX
BOOL
Ordem de deslastre/ reposição por tensão do
barramento X
S01_ORD_DES_FRQ
BOOL
Ordem de deslastre/ reposição por frequência
da subestação
S01_ORD_DES_FRQ_BX
BOOL
Ordem de deslastre/ reposição por frequência
do barramento X
0 – Disjuntor ou
seccionador aberto
(Default)
1 – Disjuntor ou
seccionador fechado
Tabela 4.13 – Descrição de inputs do bloco “BLC1.1_STN”
Output
Tx_CAL_SRV
Tipo
Descrição
BOOL Indicação de serviço do transformador x
Estado
0 – Fora de serviço
(Default)
1 – Em serviço
Tx_CAL_CFG
INT
Codificação da configuração do transformador
x
Tx_CAL_CPC
Indicação que o transformador x deverá
BOOL considerar a ligação de bateria de
condensadores
Tx_CAL_DRT
BOOL
Tx_CAL_DRF
Indicação que o transformador x é alvo do
BOOL programa de “Deslastre/ Reposição por
frequência”
Codificação de acordo
com a tabela 4.12
0 – OFF (Default)
1 – Ordem de ligação
0 – OFF (Default)
Indicação que o transformador x é alvo do
programa de “Deslastre/ Reposição por tensão” 1 – Deslastre activo
0 – OFF (Default)
1 – Deslastre activo
Tabela 4.14 – Descrição de outputs do bloco “BLC1.1_STN”
42
4.4.4 Recepção e verificação de medidas do exterior
A função de regulação automática de tensão recebe os vários valores do exterior do autómato
de acordo com a estrutura apresentada no capítulo 4.3.3. Uma vez que o bom funcionamento da
função depende da correcta recepção destes parâmetros é necessário verificar o seu valor lógico.
A segunda zona da função “AVR” – Recepção e verificação de medidas do exterior – permite
receber as diferentes variáveis e verificar se os seus valores tem sentido lógico emitindo a respectiva
sinalização quando estes estiverem fora dos limites admissíveis.
Bloco “BLC2.1_PWR”
O bloco “BLC2.0_PWR”, recebe os valores de potência
referentes ao transformador ou grupo de transformação e efectua os
cálculos de forma a que na sua saída todos os valores estejam em
unidades SI, permitindo assim efectuar os diferentes cálculos.
Devido
à
existência
das
várias
fontes
de
informação
previamente referidas, este bloco foi desenhado com dois modos de
funcionamento distintos:
•
Medições – Recebe o valor do módulo da tensão, corrente
e da potência reactiva através das entradas analógicas do
autómato. Com os valores fornecidos o bloco calcula os valores
da corrente activa, reactiva, potência aparente, activa e o factor
de potência
•
Comunicações – Recebe todos os valores da unidade de
serviços auxiliares, verificando apenas os seus limites.
Figura 4.6 – Bloco “BLC2.1_PWR”
O modo de funcionamento pode ser diferente para cada um dos transformadores ou grupo de
transformação. No entanto, por defeito esta variável está definida com o modo “Medições”. A sua
alteração é feita através do menu de configuração, no qual também é possível configurar a unidade
de apresentação de valores das tensões e correntes (tabela 4.15).
O funcionamento no modo “Medições” implica a parametrização dos valores do primário e
secundário dos TT’s e TI’s, pois só desta forma o autómato pode calcular a relação de transformação
destes e consequentemente o valor da tensão e corrente nas unidades definidas.
Por sua vez, quando o bloco estiver parametrizado para funcionar no modo “Comunicações”,
este limita-se a receber todos os valores do autómato de serviços auxiliares por comunicação interna
na subestação e verifica se excedem os limites definidos.
A monitorização dos valores limites da tensão e corrente é uma sub-função que permite evitar
o funcionamento da regulação automática perante situações anômalas da rede. Devido à sua
importância estas estão activas por defeito, sendo possível condicionar o seu funcionamento através
do menu de configuração.
43
O bloco “BLC2.1_PWR” disponibiliza três verificações: Sobretensões; mínimos de tensão e
máximos de corrente por excesso de carga, cujo funcionamento é independente e a configuração
feita a diferentes níveis:
1.
Inibição/ Activação da verificação;
2.
Definição do tipo de input do valor limite (Percentagem ou valor limite);
3.
Definição do valor limite;
4.
Tempo de hold até emissão do bloqueio;
5.
Inibição/ Activação do envio de sinalização;
Bloqueio por mínimo de tensão
O bloqueio por mínimo de tensão previne alterações de tomadas quando existe uma falha na
rede que alimenta o transformador. A função de regulação de tensão deixa de emitir ordens e é
activada a sinalização “SNL07 – Bloqueio por mínimo de tensão”, quando a tensão medida no
barramento é inferior à tensão de bloqueio definida.
O limite admissível que activa o bloqueio é definido pelo utilizador e pode ser de dois tipos:
•
Percentagem [%] – Valor em relação à tensão de referência cálulado pela equação 4.1
= (=
=
/BB
(4.1)
Limite aconselhado: 60% até 90%
•
Valor absoluto [V] / [kV]
Função “Máximo de Tensão”
A função de “Máximo de Tensão” permite detectar sobretensões. Durante a sua actuação a
emissão de ordens de “Subir” é bloqueada e são elaboradas ordens de “Descer” consecutivas, por
forma a colocar novamente a tensão dentro dos limites admissíveis.
À semelhança do que acontece com a função de bloqueio por mínimo de tensão, o limite pode
ser definido de duas formas. No caso da percentagem os cálculos são efectuados de acordo com a
equação 4.2
=' (=
='
/BB
(4.2)
Neste modo o limite aconselhado está compreendido entre os valores de 100 e 140%.
Bloqueio por máximo de corrente
O bloqueio por máximo de corrente previne alterações de tomadas nos casos de sobrecarga.
As ordens do regulador de tensão são bloqueadas enquanto a corrente de carga for superior ao valor
máximo admissível definido.
44
Descrição das ligações
As tabelas 4.15 e 4.16 contém as descrições das diferentes ligações do bloco “BLC2.1_ PWR”
e os respectivos valores por elas assumidos.
Tipo
Descrição
CAL_ENB
BOOL
Enable do bloco. Depende se o transformador se
encntra em serviço/ fora de serviço
PRM_MDE
BOOL
Input
PRM_VLT_UNT
PRM_CRT_UNT
PRM_PWR_UNT
0 – OFF(Default)
1 – ON
Parâmetro do menu de configuração que define o 0 – Comunicações (Def.)
modo de funcionamento do bloco
1 – Medições
Parâmetro do menu de configuração que define a 0 – [V]
BOOL
unidade dos valores da tensão
1 – [kV] (Default)
Parâmetro do menu de configuração que define a 0 – [A] (Default)
BOOL
unidade dos valores da corrente
1 – [kA]
Parâmetro do menu de configuração que define a 0 – [VA], [W], [VAr] (Def.)
BOOL
unidade dos valores de potência
1 – [MVA], [MW], [MVAr]
MSR_VLT_ABS
REAL Módulo da tensão no barramento em questão
PRM_TT_PRI
REAL
PRM_TT_SCD
Valor
C
C em V ou kV
Parâmetro do menu de configuração referente ao
[kV]
valor do primário do transformador de tensão
Parâmetro do menu de configuração referente ao
REAL
[V]
valor do secundário do transformador de tensão
C
C em A ou kA
MSR_CRT_ABS
REAL Módulo da corrente entregue pelo transformador
MSR_CRT_REL
REAL Corrente activa entregue pelo transformador
MSR_CRT_IMG
REAL Corrente reactiva entregue pelo transformador
PRM_TI_PRI
REAL
Parâmetro do menu de configuração referente ao
[A]
valor do primário do transformador de corrente
PRM_TI_SCD
REAL
Parâmetro do menu de configuração referente ao
[A]
valor do secundário do transformador de corrente
MSR_PWR_ABS
REAL Potência aparente entregue pelo transformador
E2 E em MVA
MSR_PWR_REL
REAL Potência activa entregue pelo transformador
FD em MW
MSR_PWR_IMG
REAL Potência reactiva entregue pelo transformador
F, em Mvar
MSR_PWR_ANG
REAL
Ângulo de potência aos terminais do
transformador
[rad]
PRM_VLT_REF
REAL
Parâmetro do menu de configuração referente à
tensão de referência para o barramento
em V ou kV
PRM_VLT_MIN_ENB
Parâmetro do menu de configuração que enibe
BOOL ou activa a funcionalidade de “Bloqueio por
Mínimo de Tensão”
PRM_VLT_MIN_MDE
BOOL
Parâmetro do menu de configuração que define o 0 – [%] (Default)
formato do valor minimo de tensão admissivel
1 – [V] / [kV]
PRM_VLT_MIN_VLE
REAL
[%] ou [V] / [kV] de acordo
Parâmetro do menu de configuração que define o
com o valor de
valor minimo de tensão admissivel
PRM_VLT_MIN_MDE
PRM_VLT_MIN_TME
INT
PRM_VLT_MIN_SNL
BOOL
,
D
em A ou kA
em A ou kA
0 – OFF
1 – ON (Default)
Parâmetro do menu de configuração relativo ao
tempo que a função aguarda até activar o
bloqueio por minimo de tensão
2 s default
Parâmetro do menu que enibe ou activa a
emissão de sinalizações
0 – OFF
1 – ON (Default)
45
PRM_VLT_MAX_ENB
PRM_VLT_MAX_MDE
PRM_VLT_MAX_VLE
PRM_VLT_MAX_TME
PRM_VLT_MAX_SNL
0 – OFF
1 – ON (Default)
Parâmetro do menu de configuração que define o 0 – [%] (Default)
BOOL
formato do valor máximo de tensão admissivel
1 – [V] / [kV]
[%] ou [V] / [kV], de
Parâmetro do menu de configuração que define o
REAL
acordo com o valor de
valor do limite para máximo de tensão admissivel
PRM_VLT_MAX_MDE
Parâmetro do menu de configuração relativo ao
2 s Default
INT tempo que a função aguarda até activar a
sinalização por “Máximo de Tensão”
0 – OFF
Parâmetro do menu que enibe ou activa a
BOOL
emissão da sinalização SNL_009
1 – ON (Default)
BOOL
Parâmetro do menu de configuração que enibe
ou activa a funcionalidade “Máximo Tensão”
0 – OFF
1 – ON (Default)
Parâmetro do menu de configuração que define o 0 – [%] (Default)
PRM_CRT_MAX_MDE BOOL
formato do valor máximo de corrente admissivel
1 – [A]
Parâmetro do menu de configuração que define o [%] ou [mA] / [A], de
PRM_CRT_MAX_VLE REAL valor do limite para máximo de corrente
acordo com o valor de
PRM_CRT_MAX_MDE
admissivel
Parâmetro do menu de configuração relativo ao
2 s Default
PRM_CRT_MAX_TME
INT tempo que a função aguarda até activar o
bloqueio “Máximo de Corrente”
0 – OFF
Parâmetro do menu que enibe ou activa a
PRM_CRT_MAX_SNL BOOL
emissão da sinalização
1 – ON (Default)
PRM_CRT_MAX_ENB
BOOL
Parâmetro do menu de configuração que enibe
ou activa a funcionalidade “Máximo Corrente”
Tabela 4.15 – Descrição de inputs do bloco “BLC2.1_PWR”
Output
Tipo
Descrição
Valor
CAL_VLT_ABS
REAL
Tensão actual em unidade SI
CAL_CRT_ABS
REAL
Corrente no ramo em unidade SI
CAL_CRT_REL
REAL
Corrente activa em unidade SI
CAL_CRT_IMG
REAL
Corrente reactiva em unidade SI
CAL_PWR_ABS
REAL
Potência aparente entregue pelo transformador
CAL_PWR_REL
REAL
Potência activa entregue pelo transformador
CAL_PWR_IMG
REAL
Potência reactiva entregue pelo transformador
F, em VAr
CAL_PWR_AGL
REAL
Ângulo de potência
[rad]
ORD_VLT_MIN
BOOL Ordem de “Bloqueio por Mínimo de tensão”
SNL_VLT_MIN
BOOL Sinalização de “Bloqueio por Mínimo de tensão”
ORD_VLT_MAX
BOOL Atingido o “Máximo de tensão”
SNL_VLT_MAX
BOOL Sinalização de “Máximo de tensão”
ORD_CRT_MAX
BOOL Ordem de bloqueio por “Máximo de corrente”
SNL_CRT_MAX
BOOL Sinalização de “Máximo de corrente
C
C em V
C
C em A
D
,
em A
em A
E2 E em VA
FD em W
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
Tabela 4.16 – Descrição de outputs do bloco “BLC2.1 _PWR”
46
Bloco “BLC2.2_TAP”
O bloco “BLC2.2_TAP” representado na figura 4.7 permite
calcular a posição actual da tomada do comutador de acordo com
a codificação enviada por este.
A codificação é feita em Binary Coded Decimal (BCD) e
como tal este bloco funciona como conversor digital/ analógico de 7
bits.
Figura 4.7 – Bloco “BLC2.2_TAP”
Nome
Tipo
MSR_TAP_P0X
BOOL
Descrição
Valor
Recepção de bits de codificação BCD da
posição da tomada
0 – Bit não activo (Default)
1 – Bit activo
Tabela 4.17 – Descrição de inputs do bloco “BLC2.2_TAP
Nome
Tipo
CAL_TAP_POS
INT
Descrição
Valor
Valor da posição actual da tomada do
transformador
0 a 64
Tabela 4.18 – Descrição de outputs do bloco “BLC2.2_TAP”
Bloco “BLC4.7_CIR”
O bloco “BLC4.7_CIR” representado na figura 4.8 é o
responsável pela monitorização da corrente de circulação
entre transformadores quando estes se encontram a funcionar
em paralelo.
Existem dois níveis distintos de actuação. O primeiro
nível corresponde a um alarme por excesso de corrente de
circulação e a actuação do segundo nível resultará no disparo
do disjuntor do painel de seccionamento de barras de MT,
desfazendo-se deste modo do paralelo de transformadores.
Figura 4.8 – Bloco “BLC4.7_CIR”
O método de cálculo utilizado é baseado nas filosofias de regulação apresentadas na secção
2.3.3 de acordo com o procedimento ∆I sin φ (equação 2.15), obtendo-se assim a equação 4.3.
,
,
1
.
,
F 3
F .
(4.3)
Tx
IcirQ – Corrente reactiva de circulação do transformador x;
I2Q
Tx
Gx
IQ
– Corrente reactiva no secundário do transformador x;
– Corrente reactiva entregue pelo grupo de transformação x;
Tx
S – Módulo da potência aparente entregue pelo transformador x;
Gx
S
– Módulo da potência aparente entregue pelo grupo de transformadores.
47
O valor da corrente de circulação calculado é posteriormente comparado com o valor limite
definido pelo utilizador, resultando daí a sinalização de excesso de corrente de circulação e ainda a
emissão da ordem para abertura do disjuntor.
A parametrização do valor limite pode ser definido em valor absoluto ou em valor percentual.
Neste último caso o valor é referente á corrente de referência definida para cada transformador e os
valores aconselhados para o limite neste modo de funcionamento está compreendido entre 1 e 10%.
Descrição das ligações
As tabelas 4.19 e 4.20 apresentam as características das ligações do bloco “BLC4.7_CIR”.
Tipo
Input
ENB
BOOL
GRP_PRM_CRT_CIR_ENB
BOOL
GRP_PRM_CRT_CIR_MDE
BOOL
GRP_PRM_CRT_CIR_VLE
REAL
GRP_PRM_CRT_CIR_TME
INT
GRP_PRM_CRT_CIR_SNL
BOOL
TRF_PRM_CRT_REF
REAL
GRP_CAL_PWR_ABS
REAL
GRP_CAL_CRT_IMG
REAL
TRF_CAL_PWR_ABS
REAL
TRF_CAL_CRT_IMG
REAL
Descrição
Enable do bloco. Depende do funcionamento
em paralelo do transformador
Parâmetro do menu de configuração da função
referente ao funcionamento da verificação de
correntes reactivas de circulação
Parâmetro do menu de configuração da função
referente ao modo de definição do valor
máximo da corrente de circulação
Parâmetro do menu de configuração da função
referente ao valor máximo da corrente reactiva
de circulação
Parâmetro do menu de configuração da função
referente ao tempo que a função aguarda antes
da emissão da ordem de abertura do disjuntor
Parâmetro do menu de configuração da função
referente à emissão de sinalização perante o
excesso de corrente reactiva de circulação
Parâmetro do menu de configuração da função
referente à corrente nominal do transformador
Potência entregue pelo grupo calculada pelo
bloco “BLC3.1_GRP”
Corrente reactiva entregue pelo grupo,
calculada pelo bloco“BLC3.1_GRP”
Potência entregue pelo transformador do grupo
calculada pelo bloco “BLC2.1_PWR”
Corrente reactiva entregue pelo transformador
calculada pelo bloco“BLC2.1_PWR”
Valor
0 – OFF (Individual)
1 – ON (Paralelo)
0 – OFF
1 – ON (Default)
0 – [%] (Default)
1 – [A]
10 % (Default)
10 s (Default)
0 – OFF
1 – ON (Default)
[A]
EF . E em VA
.
,
em A
,
em A
EF E em VA
Tabela 4.19 – Descrição dos inputs do bloco “BLC4.7_CIR”
Tipo
Output
Descrição
Estado
SNL_CRT_CIR
BOOL
Sinalização de excesso de corrente de
circulação
0 – OFF (Default)
1 – ON
ORD_CRT_CIR
BOOL
Ordem de disparo por corrente de circulação
0 – OFF (Default)
1 – ON
TRF_CAL_CRT_CIR_VLE
REAL
Valor da corrente reactiva de circulação no
ramo do transformador
TRF_CAL_CRT_CIR_TME
TIME
Tempo decorrido desde que o valor da corrente
[s]
de circulação é superior ao admissível
,
em A
Tabela 4.20 – Descrição dos outputs do bloco “BLC4.7 _CIR”
48
4.4.5 Gestão de regulação em paralelo
Ao longo deste trabalho é sublinhada a complexidade envolvida na regulação de
transformadores em paralelo, em resposta a essa exigência foi desenvolvida a zona de “Gestão de
regulação em paralelo” que permite atribuir diferentes grupos de funcionamento em paralelo e conferir
características de regulação distintas aos transformadores de cada grupo.
A função “AVR” considera a configuração máxima da subestação com 5 transformadores, a
qual permite a existência de 2 grupos de regulação distintos. De acordo com as exigências do
explorador da rede, estes dois grupos podem apresentar parametrizações distintas e a
formação/anulação em horários não programados (fecho/ abertura do seccionador de barras em
resposta ao aumento/diminuição de carga). Como tal, a função atribui de forma automática o grupo
aos transformadores e altera as suas parametrizações de acordo com esse grupo.
Bloco “BLC3.1_GRP”
O bloco “BLC3.1_GRP”, representado na figura 4.10 é o
primeiro a ser executado na região da “Gestão de Regulação em
Paralelo” permitindo:
•
Atribuir de forma automática o grupo de regulação a
cada transformador;
•
Calcular
o
regime
de
funcionamento
(manual/
automático) de cada grupo;
•
Calcular as componentes da potência e a corrente
reactiva de cada grupo de acordo com os valores de cada
transformador.
Este bloco recebe a informação gerada pelo bloco
“BLC1.0_STN” relativa à codificação de cada transformador e
verifica se estes se encontram em paralelo, caso isso aconteça é
activado a indicação que o transformador em questão está em
paralelo e atribuído o grupo de regulação de forma sequencial, ou
seja é atribuído o grupo de regulação 1 ao transformador com o id
Figura 4.9 – Bloco “BLC3.1_GRP”
mais baixo que esteja em paralelo (exemplo: se T1//T2 e T3//T4 é
atribuído o grupo de regulação 1 ao primeiro e o grupo de regulação 2 ao segundo).
A atribuição do modo de funcionamento do grupo é também realizada neste bloco. Para isso,
este recebe o modo de funcionamento de todos os transformadores em paralelo e calcula o modo de
funcionamento do grupo de acordo com a tabela 2.2, garantindo assim, que subestações exploradas
com semibarramentos separados e com diferentes regimes de funcionamento distintos na sua
interligação, o regime “automático” prevalece sobre o regime “manual” e passará a abranger todos os
transformadores ligados ao barramento.
O bloco é anda dotado de lógica que permite calcular as componentes da potência e corrente
entregue pelo grupo através da soma das componentes de cada transformador. Para realizar este
49
cálculo o bloco recebe os diferentes valores do bloco “BLC2.1_PWR” e sempre que detecta a
existência de um grupo em paralelo efectua a soma dos transformadores do grupo. Este cálculo
revela-se útil em subestações que não estejam equipadas com transformadores de corrente à saída
do grupo de transformação, uma vez que sem o valor da corrente neste ponto a única forma de
cálculo da potência é através da soma das potências dos transformadores do grupo.
Descrição das Ligações
As tabelas 4.21 e 4.22 apresentadas de seguida contém as descrições das diferentes ligações
do bloco “BLC3.1 _GRP” e os respectivos valores por elas assumidos.
Input
Tx_CAL_CFG
Tipo
INT
Descrição
Recepção da codificação das configurações
calculadas pelo bloco “BLC1.0_STN”
Valor
Tabela 4.12
Tx_PRM_WMD
Parametrização de cada transformardor recebida do 0 – Manual (Default)
BOOL menu exterior sobre o modo de funcionamento
1 – Automático
definida
Tx_CAL_CRT_IMG
Corrente reactiva que circula no ramo do
REAL transformador x, calculada pelo bloco
“BLC2.1_PWR”
Tx_CAL_PWR_REL REAL
Tx_CAL_PWR_IMG
REAL
,
em A
Potência activa entregue pelo transformador x,
calculada pelo bloco “BLC2.1_PWR”
G em W
Potência reactiva entregue pelo transformador x,
calculada pelo bloco “BLC2.1_PWR”
H em VAr
Tabela 4.21 – Descrição de inputs do bloco “BLC3.1_GRP”
Output
Tipo
Descrição
BOOL
Indicação de funcionamento em paralelo do
transformador x
Tx_CAL_GRP
INT
Atribuição do grupo de transformação caso o
transformador esteja a funcionar em paralelo
Tx_CAL_WMD
BOOL
Cálculo do modo de funcionamento de acordo com
a tabela 2.2.
Gx_CAL_ENB
BOOL
Indicação de funcionamento do grupo de regulação
em paralelo x
Gx_CAL_CRT_IMG
Corrente reactiva do grupo de transformadores REAL soma das correntes reactivas dos transformadores
do grupo
Tx_CAL_PRL
Potência aparente entregue pelo grupo de
Gx_CAL_PWR_ABS REAL transformadores - soma das potências aparentes
dos transformadores do grupo
Gx_CAL_PWR_REL REAL
Valor
0 – Individual (Default)
1 – Paralelo
0 – Individual (Default)
1 – Grupo de regulação 1
2 – Grupo de regulação 2
Tabela 2.2
0 – OFF (Default)
1 – ON
.
,
em A
EF . E em VA
Potência activa do grupo de transformadores - soma
G . em W
das potências activas dos transformadores do grupo
Potência reactiva do grupo de transformadores Gx_CAL_PWR_IMG REAL soma das potências reactivas dos transformadores
do grupo
H . em VAr
Tabela 4.22 – Descrição de outputs do bloco “BLC3.1_GRP”
50
Bloco “BLC3.2_PRL”
O bloco “BLC3.2_PRL” representado na figura 4.10 permite
atribuir a cada transformador os parâmetros de regulação, quando
estes se encontram em paralelo.
A atribuição dos parâmetros é feita de acordo com o grupo
de regulação calculado pelo bloco “BLC3.1_GRP”, garantindo
assim a mesma parametrização para todos os transformadores do
grupo.
O funcionamento deste bloco é bastante simples, limitandose a receber os parâmetros de configuração dos dois grupos e
coloca na saída os valores do grupo correcto. Este só está activo
quando é detectado o paralelo de transformadores, estando inactivo
quando os transformadores funcionam individualmente.
Figura 4.10 – Bloco “BLC3.2_PRL”
Descrição das ligações
A tabela 4.23 contêm as descrições dos diferentes inputs do bloco “BLC3.2_PRL” e os
respectivos valores assumidos. Por sua vez, os outputs são em tudo semelhantes às entradas
apresentadas nesta tabela, variando de acordo com a entrada TRF_CAL_GRP da seguinte forma:
•
0 – Funcionamento individual, todas as saídas apresentam o valor 0;
•
1 – Transformador inserido no grupo 1, logo assume a parametrização do grupo de
transformação 1;
•
2 – Transformador inserido no grupo 2, logo assume a parametrização do grupo de
transformação 2.
Perante esta característica não se justifica a criação de uma tabela com as descrições dos
outputs do bloco, uma vez que correspondem às descrições dos seus inputs.
Inputs
Tipo
Descrição
Valor
TRF_CAL_GRP
INT
Grupo de regulação em paralelo
calculado pelo bloco “BLC3.1 _GRP”
0 – Funcionamento Individual
1 – Grupo de regulação 1
2 – Grupo de regulação 2
TRF_CAL_WMD
BOOL
Modo de funcionamento do grupo
calculado pelo bloco “BLC3.1 _GRP”
Tabela 2.1
Gx_CAL_CRT_IMG
REAL
Gx_CAL_PWR_ABS
REAL
Gx_CAL_PWR_REL
REAL
Gx_CAL_PWR_IMG
REAL
Valor da corrente reactiva à saída do
grupo de regulação x, determinada pelo
bloco “BLC3.1 _GRP”
Potência aparente entregue pelo grupo
de regulação x, determinada pelo bloco
“BLC3.1 _GRP”
Potencia activa entregue pelo grupo de
regulação x, determinada pelo bloco
“BLC3.1 _GRP”
Potencia reactiva entregue pelo grupo
de regulação x, determinada pelo bloco
“BLC3.1 _GRP”
.
,
em A
EF . E em VA
G . em W
H . em VAr
51
Gx_PRM_WMD
BOOL
Parametrização do grupo x referente ao
regime de funcionamento de acordo
com a tabela 2.2
0 – Manual (Default)
1 – Automático
Gx_PRM_VLT_REF
REAL
Parametrização do grupo x referente à
tensão de referência do grupo de
regulação
em V ou kV
Gx_PRM_CRT_REF
REAL
Parametrização do grupo x referente à
corrente de referência do grupo de
regulação
[A]
INT
Parametrização do grupo x referente à
banda de desvio de tensão admissivel
[%]
Gx_PRM_TME_MDE
BOOL
Parametrização do grupo x referente ao
tipo de “tempo de desvio”
Gx_PRM_TME_VLE
INT
Parametrização do grupo x referente ao
tempo de hold quando o “tempo desvio”
é do tipo ”tempo independente”
[s]
REAL
Parametrização do grupo x referente ao
desvio da tensão de base quando se dá
a ligação da bateria de condensadores
no barramento do grupo
[%]
Gx_PRM_LDC_ENB
BOOL
Parametrização do grupo x referente ao
funcionamento da “Compensação de
quedas de tensão na linha” para o
grupo de regulação x
0 – OFF (Default)
1 – ON
Gx_PRM_LDC_NTR
REAL
Parametrização do grupo x referente à
resistência da rede ligada ao
barramento
em ohm
Gx_PRM_LDC_NTX
REAL
Parametrização do grupo x referente à
em ohm
reactância da rede ligada ao barramento
BOOL
Parametrização do grupo x referente ao
método de regulação em paralelo
Gx_PRM_BDW
Gx_PRM_CPC_VLE
0 – Tempo Linear (Default)
1 – Tempo Inverso
0 – Minimização de correntes
Gx_PRM_PRL_MDE
reactivas (Default)
1 – Master / Follower
Gx_PRM_PRL_MST
INT
Parametrização do grupo x referente ao
Master para a regulação
“Master/Follower” do grupo
-
Gx_PRM_CRT_CIRT_ENB
INT
Parametrização do grupo x referente ao
funcionamento da verificação de
correntes reactivas
0 – OFF (Default)
1 – ON
Parametrização do grupo x referente ao
Gx_PRM _CRT_CIR_MDE
BOOL
formato do valor máximo de corrente de
circulação admissivel
Gx_PRM _CRT_CIR_VLE
REAL
0 – [%] (Default)
1 – [A]
Parametrização do grupo x referente ao
Depende do parâmetro
valor máximo de corrente admissivel
PRM_CRT_CIR_MDE
Parametrização do grupo x referente ao
Gx_PRM_CRT_CIR_TME
INT
tempo que a função aguarda até emitir a 10 s (Default)
ordem de abertura do disjuntor
Gx_PRM_CRT_CIR_SNL
BOOL
Configuração da emissão da sinalização 0 – OFF
de corrente de circulação
1 – ON (Default)
Tabela 4.23 – Descrição de inputs do bloco “BLC3.2_PRL”
52
4.4.6 Transformadores – Elaboração de ordens
O processo de elaboração de ordens é activado após a execução dos blocos apresentados
anteriormente, ou seja, caso um transformador esteja em serviço – funcionamento individual ou
paralelo – e os requisitos da tabela 4.1, sejam cumulativamente cumpridos, são calculadas as ordens
de forma individual para cada um dos comutadores de tomadas em serviço em duas fases distintas:
1.
Cálculo do desvio actual da tensão - ∆V;
2.
Verificação da banda admissível;
O desvio actual da tensão de cada transformador é calculado ciclicamente através da
expressão matemática que considera quatro parcelas distintas:
Tx
•
Diferença entre a tensão medida (|V2 |) e a tensão de base (V0);
•
Redução da tensão base por efeito da ligação de baterias de condensadores;
•
Compensação das quedas de tensão na linha;
•
Circulação de potência reactiva entre transformadores em paralelo.
As parcelas referidas são consideradas no cálculo do desvio mediante a configuração do
utilizador e a estrutura actual de funcionamento da subestação, evitando assim regulações sofríveis e
inadequadas. Exemplo só faz sentido considerar a circulação de potência reactiva quando existem
transformadores em paralelo.
O valor do desvio calculado em cada ciclo é comparado com o valor máximo admissível. Caso
se verifique que este valor ultrapassa a banda admissível a função aguarda um tempo definido pelo
utilizador a fim de evitar ordens intempestivas em caso de ocorrência de alterações transitórias da
tensão.
O tempo que a função aguarda pode apresentar duas características distintas – tempo
independente ou tempo inverso – configuradas pelo utilizador, durante o qual não é emitida qualquer
ordem. Se o valor de tensão continuar fora da banda admissível esgotado este período é emitida a
ordem de descer ou subir de acordo com o sinal do desvio calculado, como esquematizado na figura
4.11.
Figura 4.11 – Elaboração de ordens
53
Bloco “BLC4.1_DVI”
O bloco “BLC4.1_DVI” calcula o desvio actual da tensão de
acordo com as configurações definidas e o modo de funcionamento
do
transformador
em
questão.
O
seu
funcionamento
está
condicionado pela verificação das condições da tabela 4.1, ou seja,
só calcula o desvio caso o transformador esteja em serviço e o
regime de funcionamento seja o “automático”.
Os valores para os cálculos são recebidos do bloco
“BLC2.1_PWR”, garantindo assim estes estão todos em unidades
SI.
A parcela fundamental do cálculo efectuado resume-se à
diferença entre o módulo da tensão medida
Tx
(|V2 |)
e a tensão de
Figura 4.12 – Bloco
“BLC_4.1_DVI”
base (V0), quando as quedas de tensão na rede não são compensadas e não existem
P1
transformadores em paralelo. Neste caso o desvio da tensão (∆V) resume-se à parcela ∆V , dada
pela equação 4.2.
I E E (4.4)
O segundo parâmetro considerado nos cálculos prende-se com a ligação de baterias de
condensadores ao barramento onde está ligado o transformador. A função recebe a indicação de
ligação de baterias do automatismo “Comando de Baterias de Condensadores” e a tensão base é
diminuída uma percentagem configurada pelo utilizador no menu da função – equação 4.3. Esta
acção pode provocar a emissão de ordens de descer e a função terá de aguardar até ao
restabelecimento do equilíbrio entre a tensão medida e a nova tensão. Atingido o equilíbrio, o bloco
informa a função “Comando de Baterias de Condensadores”, desencravando a emissão da ordem de
fecho ao disjuntor da bateria.
J I 1
I
3
/BB
(4.5)
Considerando a nova parcela, o cálculo do desvio é agora dado pela equação 4.4, nos
momentos que antecedem a ligação das baterias de condensadores ao barramento, as quedas de
tensão na rede não são compensadas e não existem transformadores em paralelo:
I E E J I (4.6)
A próxima parcela que este bloco considera permite compensar as quedas de tensão na rede
através do conceito LDC apresentado no capítulo 0. Esta funcionalidade é activada no menu de
configuração da função e permite regular a tensão no ponto de consumo em oposição à saída da
subestação. O valor do desvio introduzido por esta técnica é calculado pela equação 4.5, sendo
necessário configurar os parâmetros R e X de acordo com as características das linhas ligadas ao
barramento em questão.
G H
E E
(4.7)
54
A escolha do sinal a considerar no numerador da equação depende da natureza indutiva ou
capacitiva da carga de acordo com as condições:
•
Cargas indutivas - A parcela XQ é somada à parcela RP;
•
Cargas capacitivas - A parcela XQ é subtraída à parcela RP.
E os valores utilizados:
•
LDC
– Resistência da rede cujas quedas de tensão devem ser compensadas [Ω];
LDC
– Reactância da rede cujas quedas de tensão devem ser compensadas [Ω];
R
•
X
•
P – Potência activa total fornecida à rede em questão;
•
Q – Potência reactiva total fornecida à rede em questão;
Como apresentado na secção 2.4.4 este método apresenta maus resultados quando é utilizado
em barramentos que alimentam linhas com diferentes comprimentos. Como tal, se um transformador
a funcionar individualmente tem esta característica activa, caso seja ligado a outro barramento
através do fecho do seccionador de barras o LDC é desactivado.
Combinando os desvios parcelares calculados mediante as fórmulas 4.3 e 4.4, o desvio ∆V é
dado pela expressão 4.6, quando as quedas de tensão na rede são compensadas e não existem
transformadores a funcionar em paralelo.
E! E G H
E! E
(4.8)
O desvio parcelar correspondente à circulação de potência reactiva entre transformadores em
paralelo é apenas considerado quando a função detecta que o transformador em questão foi inserido
num grupo em paralelo. A função disponibiliza dois modos de regulação em paralelo distintos
apresentados no capítulo 2.3.3 – “Master /Follower” e “Minimização de correntes reactivas”. Quando o
modo de regulação definido é o de “Minimização de correntes Reactivas” o valor do desvio é
calculado pela equação 4.7, a qual é imposta pelo explorador da rede e que no fundo resulta da
manipulação da equação 2.14.
AK E
EL
H. 1H
G 3
E E
G.
(4.9)
O cálculo desta parcela implica o conhecimento dos parâmetros:
Tx
•
|Zcc |– Módulo da impedância do transformador x vista do secundário;
•
Px – Potência activa fornecida pelo transformador x;
•
Qx – Potência reactiva fornecida pelo transformador x;
Combinando as fórmulas apresentadas anteriormente, obtém-se a expressão geral do desvio
para cada transformador:
J E E J I E
G H EL
H.
1H . G! 3
E E
E E
G
(4.10)
55
Descrição das ligações
As tabelas 4.24 e 4.25 contém as descrições e características das ligações do bloco
“BLC4.1_DVI”.
Input
Tipo
Descrição
Valor
CAL_ENB
BOOL
0 –Não efectua
Enable do bloco. Recebe o resultado da verificação das cálculos (Default)
condições da tabela 4.1
1 – Efectua cálculos
CAL_VLT_ABS
REAL
Módulo do valor eficaz da tensão do barramento em
questão, proveniente do bloco“BLC2.1_PWR”
E E em volt
PRM_VLT_REF
REAL
Parâmetro do menu de configuração da função
referente à tensão de referência
em volt
ORD_CPC
BOOL
Indicação da ligação de baterias de condensadores
0 – OFF (Default)
1 - ON
PRM_CPC_DVI
REAL
Parâmetro do menu de configuração da função
referente ao desvio da tensão de referência perante a
ligação de baterias de condensadores
I em %
PRM_LDC_ENB
BOOL
Parâmetro do menu de configuração da função
referente à activação do cálculo da compensação da
queda de tensão na rede
0 – OFF (Default)
1 - ON
PRM_LDC_NTR
REAL
Parâmetro do menu de configuração da função
referente á resitência da linha
em ohm
PRM_LDC_NTX
REAL
Parâmetro do menu de configuração da função
referente á reactância da linha
em ohm
CAL_PRL
BOOL
Indicação de funcionamento em paralelo, calculado
pelo bloco “BLC3.1_ GRP”
0 – Individual
(Default)
1 - Paralelo
CAL_PRL_MTD
BOOL
Parâmetro do menu de configuração da função
referente ao método de regulação em paralelo
0 – Master /
Follower
1 – Circulação
(Default)
TRF_PRM_ZCC
REAL
Parâmetro do menu de configuração da função
referente à impedância de curto circuito do
transformador
E
EL
em ohm
TRF_CAL_PWR_REL
REAL
Valor da potência activa entregue pelo transformador
calculada pelo bloco“BLC2.1 _PWR”
G! em watt
TRF_CAL_PWR_IMG
REAL
Valor da potência reactiva entregue pelo transformador
calculada pelo bloco“BLC2.1 _PWR”
H! em VAr
GRP_CAL_PWR_REL
REAL
Valor da potência activa entregue pelo grupo de
transformação calculada pelo bloco “BLC3.1_GRP”
G. em watt
GRP_CAL_PWR_IMG
REAL
Valor da potência reactiva entregue pelo grupo de
transformação calculada pelo bloco “BLC3.1_GRP”
H. em VAr
Tabela 4.24 – Descrição dos inputs do bloco “BLC4.1_DVI”
Output
TRF_CAL_VLT_DVI
Tipo
REAL
Descrição
Desvio actual da tensão para o transformador em
questão
Valor
J em volt
Tabela 4.25 – Descrição dos outputs do bloco “BLC4.1_DVI”
56
Bloco “BLC4.2_BDW”
O bloco “BLC4.2_BDW” verifica se o desvio
actual da tensão está dentro da banda admissível e
gere o tipo de tempo de hold antes da emissão da
ordem final.
O bloco recebe o desvio calculado pelo bloco
“BLC4.1_DVI” e a banda admissível parametrizada
pelo utilizador em valor percentual em relação à
tensão de referência. Estes valores permitem verificar
se o desvio actual está dentro da banda admissível
representada na figura 4.12, de acordo com a
Figura 4.13 – Bloco “BLC4.2_BDW”
expressão:
-/ M
M
0 N OPQ N -/ 0
/BB
/BB
(4.11)
A violação da banda admissível activa um timer criado para evitar ordens intempestivas no
caso de ocorrência de alterações transitórias da tensão. A característica do tempo desvio é
parametrizada pelo utilizador. Porém, pode ser alterada pela activação das funções de deslastre,
assumindo dois comportamentos distintos:
•
Linear – O tempo desvio é um valor fixo definido pelo utilizador, independente do valor do
desvio;
•
Inverso – O tempo de hold depende do valor do desvio de forma inversa de acordo com a
característica da figura 4.14 permitindo que a função responda mais rapidamente a maiores
desvios.
Figura 4.14 – Característica do tempo inverso
Independentemente do tipo de tempo desvio utilizado, caso o valor da tensão continue fora da
banda admissível findo o tempo é emitida a ordem final, em contrapartida se o valor da tensão voltar
a apresentar valores dentro da banda admissível durante a execução do timer, este é interrompido e
o seu valor reiniciado não sendo emitida qualquer ordem.
57
Descrição das ligações
As descrições e características das ligações do bloco “BLC4.2_BDW” estão presentes nas
tabelas 4.26 e 4.27.
Input
TRF_CAL_ENB
Tipo
BOOL
Descrição
Enable do bloco. Recebe o resultado da
verificação das condições da tabela 4.1
Valores
0 –Não efectua cálculos
(Default)
1 – Efectua cálculos
CAL_VLT_DVI
REAL
Valor do desvio actual da tensão calculado pelo
bloco “BLC4.1_DVI”
J em volt
PRM_VLT_REF
REAL
Parâmetro do menu de configuração da função
referente à tensão de referência
em volt
PRM_BDW
REAL
Parâmetro do menu de configuração da função
referente à banda admíssivel da tensão
M em percentagem
PRM_TME_MDE
BOOL
Parâmetro do menu de configuração da função
referente ao tipo de tempo-desvio
0 – Tempo Linear (Default)
PRM_TME_VLE
TIME
Parâmetro do menu de configuração da função
referente ao tempo de hold, quando configurado
com tempo linear
AUX_CPC
BOOL
Variável interna da função calculada pelo bloco
“BLC4.3_CPC” activada durante a redução da
tensão base para a ligação de baterias de
condensadores
AUX_DES
BOOL
Variável interna da função calculada pelo bloco
“BLC4.4_DES”, activada durante a execução das
funções de deslastre
AUX_SNC
BOOL
Variável interna da função calculada pelo bloco
“BLC4.5_ORD”, activada durante a execução do
sincronismo automático de tomadas
1 – Tempo Inverso
10 s (Default)
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
Tabela 4.26 – Descrição dos inputs do bloco “BLC4.2_BDW”
Output
Tipo
Descrição
Valores
TRF_CAL_ORD
BOOL
Ordem final para o bloco “BLC4.5_ORD”, quando
ultrapassado o tempo de hold
0 – OFF (Default)
1 - ON
CAl_TME_MDE
BOOL
Variável interna da função que codifica o tipo de
tempo desvio actual do bloco
0 – Tempo Linear (Default)
1 – Tempo Inverso
CAL_VLT_DVI
REAL
Valor do desvio utilizado para distinguir ordens de
subir ou descer
J em volt
CAL_CPC_DVI
BOOL
Variável interna da função que informa o bloco
“B4.3_CPC” que a tensão volta a estar dentro do
limite admissivel e pode ser dada a ordem de
fecho do disjuntor para ligação da bateria
CAL_TME_DVI
TIME
Tempo decorrido, desde que foi ultrapassado o
limite admissível da tensão
0 – OFF (Default)
1 - ON
[s]
Tabela 4.27 – Descrição dos outputs do bloco “BLC4.2_BDW”
58
Bloco “BLC4.3_CPC”
O bloco “BLC4.3_CPC” funciona como auxiliar
na coordenação com a função “Comando de
baterias de condensadores”.
A interação da função “AVR” com a função
previamente referida é efectuada nas seguintes
Figura 4.15 – Bloco “BLC4.3_CPC”
etapas:
1)
Recebe ordem de ligação da função “Comando de baterias de condensadores”;
2)
Activa a sinalização “SNL_03” até à emissão da ordem de fecho ao disjuntor da bateria;
3)
Cálculo do desvio considerando a parcela da equação 4.4;
4)
Emissão de ordens de descer enquanto o desvio está fora da banda admissível;
5)
Quando a tensão volta a estar dentro da banda admissível o bloco informa a função
“comando de baterias de condensadores”, desencravando a emissão da ordem de fecho ao
disjuntor da bateria, através da saída “ORD_CPC_OUT”.
O bloco é ainda dotado de lógica adicional que permite interromper a sub-função, a ele
associada, perante possíveis falhas de algum dos elementos. A primeira medida está associada à
passagem do regime de funcionamento para “manual”, como referido na secção 2.3.1, a qual provoca
um reset na função.
A segunda medida é imposta por uma temporização, definida pelo utilizador, finda a qual é
emitida a ordem de fecho do disjuntor de ligação de bateria de condensadores, independentemente
do desvio da tensão. A emissão da ordem implica que a coordenação entre funções está concluida, e
como tal, a tensão de referência volta ao seu valor inicial.
Descrição das ligações
As descrições e características das ligações do bloco “BLC4.3_CPC” estão presentes nas
tabelas 4.28 e 4.29.
Tipo
Descrição
ORD_CPC
BOOL
Indicação de ligação da bateria de condensadores
do bloco “BLC1.1_STN”
0 –OFF (Default)
CAL_AUX_DVI
BOOL
Recepção da informação do bloco “BLC4.2_BDW”
que a tensão voltou a estar dentro da banda
0 – OFF (Default)
RST
BOOL
Reset da coordenação. Passagem do regime de
funcionamento para “manual”
0 – Manual (Default)
1 - Automático
Input
Valores
1 – ON
1 - ON
Tabela 4.28 – Descrição dos inputs do bloco “BLC4.3_CPC”
Output
Tipo
Descrição
Valores
CAL_CPC_ENB
BOOL
Variável interna da função “AVR” activa durante a 0 –OFF (Default)
redução da tensão base para a ligação de baterias
1 – ON
de condensadores
ORD_CPC_OUT
BOOL
Informação para a função “Comando de baterias
de condensadores”que desencrava a emissão da
ordem de fecho ao disjuntor da bateria
0 – OFF (Default)
1 - ON
Tabela 4.29 – Descrição dos outputs do bloco “BLC4.3_CPC”
59
Bloco “BLC4.4_DES”
À semelhança do que acontece com o bloco
“BLC4.3_CPC”, o bloco “BLC4.4_DES” funciona
como um auxiliar que permite a coordenação dos
diferentes passos durante a execução das funções
“Deslastre/
reposição
por
tensão”
e
“Deslastre/
Figura 4.16 – Bloco “BLC4.4_DES”
reposição por frequência”.
Durante a execução dos programas de deslastre este bloco informa a restante função “AVR”
desta condição através das suas saídas, prevenindo assim a elaboração de ordens perante a
passagem do valor máximo admissível da tensão, devido à diminuição da carga provocada pela
acção dos respectivos programas.
Enquanto não existe tensão no barramento o bloco “BLC4.4_DES” cria uma ordem para o
bloco “BLC4.5_ORD”, face à qual são geradas ordens de subir ou descer, por forma a colocar a
tomada do comutador na posição de referência, caso esta se encontre definida e o regulador esteja
em modo “automático”. Ao regressar a tensão, após a execução do programa de deslastre por falta
de tensão, este bloco emite uma ordem para o bloco “BLC4.2_BDW” e a característica de “tempodesvio” é comutada para “tempo inverso” em relação ao barramento em questão. O retorno à
característica “tempo independente” verifica-se quando a função “deslastre/reposição por tensão”
voltar ao repouso.
Descrição das ligações
As descrições e características das ligações do bloco “BLC4.4_DES” estão presentes nas
tabelas 4.30 e 4.31.
Input
Tipo
Descrição
Valores
ORD_DRT
BOOL
Recepão da ordem “Deslastre /reposição por
tensão” do bloco “BLC1.1_STN”
0 –OFF (Default)
ORD_DRF
BOOL
Recepão da ordem “Deslastre /reposição por
frequência” do bloco “BLC1.1_STN”
0 – OFF (Default)
AUX_VLT_ABS
REAL
Variável interna da função que informa o bloco
quando a tensão retorna ao barramento
1 – ON
1 - ON
[V]
Tabela 4.30 – Descrição dos inputs do bloco “BLC4.4_DES”
Output
Tipo
Descrição
Valores
AUX_DES_BLC_ORD
BOOL
Variável interna da função que emite ordens para
o bloco “BLC4.5_ORD” para que a tomada seja
colocada na posição de referência
0 –OFF (Default)
AUX_DES_BLC_BDW
BOOL
Variável interna da função que emite ordens para
o bloco “BLC4.2_BDW” para alterar o tipo de
“tempo desvio”
0 – OFF (Default)
1 – ON
1 - ON
Tabela 4.31 – Descrição dos outputs do bloco “BLC4.4_DES”
60
4.4.7 Transformadores – Emissão e controlo de ordens
A última zona da função “AVR” permite considerar o estado de diferentes variáveis que
condicionam a emissão da ordem final para o comutador de tomadas. Desde logo, o modo de
funcionamento de regulação (Master, Slave, Minimização de correntes reactivas) que determina a
origem da ordem. Posteriormente é considerada a execução de qualquer manobra de alteração de
tomadas e finalmente é necessário verificar se foram atingidas as últimas posições do comutador
(topos). É também nesta zona da função que se verifica se a ordem foi correctamente executada
emitindo uma sinalização quando isso não acontece.
Bloco “BLC4.5_ORD”
O bloco “BLC4.5_ORD” apresentado na figura 4.17 é o
responsável pela emissão da ordem final de subir ou descer
ao comutador de tomadas em serviço de um transformador de
acordo com o método de regulação definido o estado do
comutador.
Os regimes de funcionamento apresentados na secção
2.3.1 e os métodos de regulação em paralelo estudados na
secção 2.3.3 são considerados através de quatro modos de
gerar as ordens finais para o comutador:
•
Master – As ordens são dadas de acordo com os
cálculos efectuados pelo bloco “BLC4.1_DVI”. Se o
desvio calculado for positivo, será elaborada uma ordem
de descer ao comutador de tomadas em serviço do
transformador respectivo, por sua vez se o desvio
Figura 4.17 – Bloco “BLC4.5_ORD”
calculado for negativo, será elaborada uma ordem de subir;
•
Follower – As ordens para o transformador em questão são emitidas de acordo com as
ordens do transformador a funcionar como master, implicando assim que cada transformador
receba todas as ordens possíveis de todos os transformadores;
•
Deslastre – Durante a execução das funções de deslastre, o bloco compara a tomada
actual com a tomada de referência e emite ordens de subir ou descer de forma a colocar a
tomada na posição de referência;
•
Manual – Quando o regime de funcionamento da função é “Manual” para o transformador
em questão é possível o comando voluntário do comutador de tomadas em serviço
Recebida a ordem de “subir” ou de “descer”, o bloco verifica se está em curso uma manobra de
mudança de tomadas no comutador, aguardando o fim da mudança caso isso se verifique.
Adicionalmente só é emitida a ordem final se a tomada do comutador não estiver nas posições limites
(inferior ou superior). Caso isso se verifique é emitida a sinalização “Topo Inferior” ou “Topo Superior”
e cancelada a ordem elaborada.
61
Descrição das ligações
As características das ligações do “BLC4.5_ORD” são apresentadas nas tabelas 4.32 e 4.33.
Input
TRF
Tipo
INT
Descrição
Indicação do transformador em questão
Valor
# R$S T $ U/#V#W#X#YZ
TRF_CAL_SVR
BOOL
Indicação do serviço do transformdor, recebida
pelo bloco “BLC1.1_STN”
0 – Fora de serviço
TRF_CAL_ENB
BOOL
Enable do bloco. Recebe o resultado da
verificação das condições da tabela 4.1
0 – Não efectua cálculos
TRF_CAL_WMD
BOOL
Regime de funcionamento do transformador
TRF_CAL_ORD
BOOL
Ordem elaborada pelo bloco “BLC4.2_BDW”
TRF_CAL_VLT_DVI
REAL
Valor do desvio calculado pelo bloco
“BLC4.1_DVI”
∆ em volt
TRF_CAL_TAP_POS
INT
Valor da posição da tomada calculado pelo
bloco “BLC2.2_TAP”
-
TRF_CAL_PRL
INT
Indicação de funcionamento em paralelo do
transformador
1 – Em serviço
1 – Efectua cálculos
0 – Manual (Default)
1 – Automático
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
TRF_PRM_PRL_MTD
BOOL
Parâmetro do menu de configuração da função
referente ao método de regulação em paralelo
0 – Master /Follower
1 – CREACTIVAS
(Default)
TRF_PRM_PRL_MST
INT
Parâmetro do menu de configuração da função
referente ao master da regulação em paralelo
0a5
TRF_PRM_TME_IMP
INT
Parâmetro do menu de configuração da função
referente ao tempo de duração do impulso da
ordem
[s]
TRF_PRM_TAP_REF
INT
Parâmetro do menu de configuração da função
referente à tomada de referência do comutador
-
TRF_MSR_TAP_MIN
BOOL
Indicação de tomada mínima recebida do
comutador de tomadas
0 – OFF (Default)
TRF_MSR_TAP_MAX
BOOL
Indicação de tomada máxima recebida do
comutador de tomadas
0 – OFF (Default)
TRF_MSR_TAP_ALT
BOOL
Indicação da actividade do comutador de
tomadas
0 – OFF (Default)
TRF_ORD_DES
BOOL
Variável interna da função calculada pelo bloco
“BLC4.4_DES” que informa a actividade das
funções de deslastre
TRF_ORD_UPR_MAN
BOOL
Ordem de subir manual (Apenas activo em
regime de funcionamento “Manual)
0 – OFF (Default)
TRF_ORD_DWN_MAN
BOOL
Ordem de descer manual (Apenas activo em
regime de funcionamento “Manual)
0 – OFF (Default)
TRF_ORD_VLT_MAX
BOOL
Ordem da sub-função “Bloqueio por máximo de
tensão”
0 – OFF (Default)
SNL_12
BOOL
Indicação da avaria do comutador
1 – ON
1 – ON
1 – ON
0 – OFF (Default)
1 – ON
1 – ON
1 – ON
1 – ON
0 – OFF (Default)
1 – ON
Tabela 4.32 – Descrição dos inputs do bloco “BLC4.5_ORD”
62
Tipo
Output
Descrição
Estado
0 – OFF (Default)
TRF_ORD_UPR
BOOL
Ordem de subir para o comutador
TRF_ORD_DWN
BOOL
Ordem de descer para o comutador
BOOL
Sinalização de “Topo Inferior” de acordo com a
tabela 2.3 activada quando é elaborada uma
ordem de descer mas o comutador se encontra na
última posição
BOOL
Sinalização “Topo Superior” de acordo com a
tabela 2.3, activada quando é elaborada uma
ordem de subir mas o comutador se encontra na
posição mais alta
TRF_SNL_TAP_MIN
TRF_SNL_TAP_MAX
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
0 – OFF (Default)
1 – ON
Tabela 4.33 – Descrição dos outputs do bloco “BLC4.5_ORD”
Bloco “BLC4.6_VRF”
Na figura 4.18 ilustra-se o bloco “BLC4.6_VRF”,
responsável pela verificação da correcta comutação de
tomada após a emissão de uma ordem, através do
algoritmo esquematizado na figura 4.19.
O bloco recebe as informações das ordens de subir
ou descer do respectivo transformador. A alteração destes
Figura 4.18 – Bloco “BLC4.6_VRF”
valores activa um timer parametrizável pelo utilizador
correspondente ao tempo que a função deve aguardar devido à mudança de tomada, fornecida ao
bloco através da variável “PRM_CMT_TME”.
Durante a comutação o bloco activa a saída “CAL_CMT_ENB”, informando assim os restantes
blocos da função que foi dada uma ordem de alteração de tomada. Por sua vez, a saída
“CAL_CMT_TME” é incrementada durante o processo de comutação representando o tempo desde a
emissão da ordem.
Terminado o tempo definido, o bloco verifica se o comutador efectuou a alteração de tomada
no sentido correcto através da comparação da posição da tomada actual - calculado pelo bloco
“BLC2.2_TAP”.- com a posição antes da comutação (variável auxiliar “AUX_TAP_t-1” guardada em
memória interna do bloco antes da ordem).
Se a mudança de tomada não tiver sido correctamente efectuada, a função de regulação
automática de tensão ficará bloqueada em relação ao transformador em questão e será emitida a
sinalização “SNL_012 - Avaria do dispositivo de comando do comutador de tomadas em serviço –
ordem não cumprida”, cujo desbloqueio apenas pode ser feito de forma manual, através da alteração
para regime “manual” (reset da função).
63
Figura 4.19– Comportamento do bloco “BLC4.6_VRF”
Descrição das ligações
As descrições e características das ligações do bloco “BLC4.6_VRF” são exibidas nas tabelas
4.34 e 4.35.
Input
Tipo
Descrição
Valor
TRF_ORD_UPP
BOOL
Recepção da ordem de subir para o transformador
emitiada pelo bloco “BLC4.5_ORD”
0 – OFF (Default)
TRF_ORD_DWN
BOOL
Recepção da ordem de descer para o transformador
emitida pelo bloco “BLC4.5_ORD”
0 – OFF (Default)
CAL_TAP_POS
INT
Posição da tomada calculada pelo bloco
“BLC2.2_TAP”
-
PRM_TME_CMT
INT
Parâmetro do menu de configuração da função
referente ao tempo de comutação da tomada
[s]
BOOL
RST
1 – ON
1 – ON
Reset do bloco – Permite desbloquear a saída
“SNL_012” activada por não cumprimento da ordem.
0 – Manual (Default)
Recebe o modo de funcionamento de função.
1 – Automático
A passagem ao regime “manual” desbloqueia o bloco
Tabela 4.34 – Descrição dos inputs do bloco “BLC4.6_VRF”
Output
CAL_CMT_ENB
CAL_ CMT_TME
SNL_012
Tipo
BOOL
TME
BOOL
Descrição
Indicação que foi emitida uma ordem e que o
comutador deverá estar em movimento
Tempo decorrido desde o ínicio da comutação
Sinalização 12 - Avaria do dispositivo de comando do
comutador de tomadas em serviço – ordem não
cumprida
Valor
0 – Comutador parado
(Default)
1 – Alteração em curso
[s]
0 – OFF (Default)
1 – ON
Tabela 4.35 – Descrição dos outputs do bloco “BLC4.6_VRF”
64
5. Testes funcionais
Neste capítulo são apresentados os testes efectuados à função “AVR”, os quais foram
realizados em duas fases distintas. Numa primeira fase a função é testada utilizando o modo de
“offline simulation” disponibilizado pela ferramenta Toolbox II apresentada no capítulo 3.3.1.
Posteriormente a função foi carregada no autómato presente no laboratório e foram simulados os
valores exteriores através de uma mala de ensaios, de forma a obter um comportamento semelhante
ao que se verifica numa subestação.
Apesar das muitas funcionalidades que a automação apresenta, as simulações foram
desenhadas considerando as situações habituais no funcionamento de uma subestação que
influenciam o comportamento da função de regulação automática. Os testes são baseados na
alteração de parâmetros de configuração dos transformadores e dos valores aos seus terminais,
sendo posteriormente registado o comportamento das variáveis de saída da função.
5.1 Características da simulação
Os testes da função foram efectuados em diferentes fases e os seus resultados comparados
no final da simulação. Para isso, foram desenhados modelos standard dos principais intervenientes
neste processo permitindo assim comparar os resultados nas diferentes situações.
5.1.1 Subestação
De forma a testar todas as funcionalidades da função de regulação automática foi escolhida a
configuração representada na figura 5.1, baseada nas topologias habituais das subestações de
distribuição da EDP
(2)
. Esta é constituída por dois transformadores com características
parametrizáveis que podem funcionar individualmente ou em paralelo através do fecho/ abertura dos
disjuntores ou seccionadores correctos.
Figura 5.1 – Configuração da subestação a simular
65
5.1.2 Linhas de saída
As linhas de saída são ambas aéreas de liga de alumínio, as quais apresentam uma
impedância característica de 0,3+j0,35 Ω/km. O valor total da sua impedância foi calculado de acordo
com o comprimento da linha e é apresentado na tabela 5.2.
Característica
L1
L2
Comprimento [Km]
7
5
Impedância [Ω/Km]
0,3+j0,35
0,3+j0,35
Impedância total [Ω]
2,1+j2,45
1,5+j1,75
Tabela 5.1 – Características das linhas simuladas
66
5.2 Testes Offline
O teste offline da função “AVR” foi realizado com recurso ao software de testes da ferramenta
CAEx Plus e a dois blocos adicionais criados para o efeito:
•
O bloco “BLC_LOD” permite simular o comportamento da carga ligada ao barramento de
saída das subestações. Este permite aumentar ou diminuir a carga variando, assim, a tensão
no secundário do transformador;
•
O bloco “BLC_TRF” simula o comportamento de dois comutadores
e dois
transformadores a funcionar em paralelo. Este recebe as ordens emitidas pela função “AVR” e,
consequentemente, desce ou sobe a tomada do comutador, cuja alteração se reflete na tensão
e corrente de saída do transformador.
5.2.1 Transformadores e comutadores de tomadas
Os transformadores de potência à entrada da subestação são equipados com um comutador
de tomadas e as principais características – tabela 5.2 – são configuráveis de acordo com o teste a
efectuar. Os valores presentes na tabela são dados normalizados neste tipo de instalações e
utilizados no arranque da simulação. Sempre que algum dos parâmetros é alterado, é feita uma
referência no inicio do descritivo da simulação.
Comutador
Transformador
Potência
Característica
T01
T02
Potência Nominal [MVA]
10
20
Tensão Nominal Primária [kV]
60
60
Tensão Nominal Secundária [kV]
15
15
6,25
7,45
Instalação do comutador
Primário
Primário
Escalões do comutador
23
23
Tomada de referência
2
2
Tomada máxima
12
12
Tomada mínima
-12
-12
+/ - 1
+ /- 1
Impedância de curto circuito (na tomada principal) [%]
Passo de comutação [%]
Tabela 5.2 – Características dos transformadores de potência
Para além dos dados apresentados na tabela 5.2 é ainda calculada a corrente nominal no
secundário dos transformadores através das equações 5.1 e 5.2.
F
[W \
F
[W \
/B /B]
[W /Y /B^
VB /B]
[W /Y /B^
W_X#`$a
(5.1)
bc`#_B$a
(5.2)
67
E o valor da impedância de curto-circuito vista do secundário em ohm.
B#BcVY L
/Y /B^ B#BcVY /#X/$d
F
/B /B]
(5.3)
L
B#BbXY /Y /B^ B#BbXY B#_X$d
F
VB /B]
(5.4)
Transformadores de Tensão/ Corrente
Os transformadores de tensão utilizados são do tipo magnético e a sua tensão primária tem o
valor normalizado de 15/√3 kV. Por sua vez a tensão no secundário é de 100 V. Relativamente ao
tipo de ligação destes, neste momento a função apenas permite considerar ligações estrela/estrela ou
triangulo/ triângulo, como tal não se considera relevante para os cálculos.
Os transformadores de corrente apresentam uma corrente nominal de 800 A para T1 e 1000 A
para T2 no enrolamento primário, de acordo com as correntes nominais calculadas na equação 5.1 e
5.2. A corrente no enrolamento secundário é de 1 A.
5.2.2 Potência de carga
A actuação da função “AVR” depende da alteração da tensão do secundário do transformador,
a qual pode ser causada por uma variação na tensão do primário (alimentação) ou uma variação da
potência de carga. Como tal, foi desenhado o bloco BLC_LOD que permite simular variações da
potência de carga, de acordo com o diagrama apresentado na figura 5.2.
Figura 5.2 – Diagrama de carga simulado
A característica da potência de carga entregue por este bloco é configurável de forma a testar
diferentes situações. A sua configuração é feita ao nível da duração dos intervalos e da taxa de
variação da potência.
5.2.3 Parametrização do menu de configuração
Os valores base usados na configuração da função durante as simulações estão presentes na
tabela 5.3, os quais serão alterados de acordo com o teste a efectuar. Cada simulação testa
diferentes funcionalidades sendo por isso referido qual o parâmetro alterado em cada ponto.
68
Descrição do parâmetro
T01
T02
G01
Regime de funcionamento
Manual
Manual
Manual
Tensão de referência [kV]
15
15
15
Corrente referência [A]
385
770
1155
Banda admissível [%]
Tipo de delay
10
10
5
Linear
Linear
Linear
Tempo de hold [s]
20
20
15
Tensão mínima de bloqueio da função “AVR” [%]
30
30
-
6,25
7,45
-
Tempo de comutação [s]
30
30
-
Tempo de Impulso [s]
5
5
-
Impedância de curto circuito [%]
Tomada de referência
2
2
-
Desvio com a ligação da bateria de condensadores [%]
30
10
20
OFF
OFF
OFF
Compensação de tensão na linha
Resistência da rede [Ω]
2,1
1,5
-
Reatância da rede [Ω]
2,45
1,75
-
0
0
-
15/√3
15/√3
-
Modo de recepção de valores do exterior
Valor do primário do TT [kV]
Valor do secundário do TT [V]
100
100
-
Valor do primário do TI [A]
800
1000
-
1
1
-
Sub função “Bloqueio por Mínimo de Tensão”
ON
ON
*
Formato do valor minimo de tensão admissível
[%]
[%]
-
Valor minimo de tensão admissivel
60
60
-
Valor do secundário do TI [A]
Tempo de hold para activar o bloqueio por minimo de tensão [s]
1
2
2
-
Sinalização de “Bloqueio por Mínimo de tensão”
ON
ON
-
Sub função “Máximo Tensão”
ON
ON
*
Formato do valor máximo de tensão admissivel
[%]
[%]
-
Valor limite para máximo de tensão admissivel
140
140
-
Tempo de hold para activar o bloqueio “Máximo tensão [s]
2
2
-
Sinalização de “Máximo de Tensão”
ON
ON
-
Sub função “Máximo Corrente”
ON
ON
*
Formato do valor máximo de corrente admissivel
[%]
[%]
-
Llimite para máximo de corrente admissivel
140
140
-
Tempo de hold para activar o bloqueio “Máximo de Corrente” [s]
Sinalização de “Máximo Corrente”
Sub função “Corrente reactiva de circulação”
2
2
-
ON
ON
-
-
-
ON
Formato do valor máximo de corrente admissivel
-
-
[%]
Llimite para máximo de corrente admissivel
-
-
10
Tempo de hold até a emissão da ordem de abertura de disjuntor [s]
-
-
10
Sinalização de “Corrente reactiva de circulação”
-
-
ON
Modo de regulação em paralelo
-
-
Min. CRT
Definição do master
-
-
1
Sincronismo automático de tomada
-
-
OFF
Tabela 5.3 – Parametrização da função "AVR" na simulação offline
1
As funcionalidades marcadas com * não estão configuradas para analisar os valores do grupo de regulação
nesta simulação, mas a função “AVR” desenvolvida permite a sua análise.
69
5.2.4 Resultados
Simulação do módulo base da função “AVR”
A primeira simulação realizada permite testar o comportamento da função para um
transformador em funcionamento individual, perante diferentes valores de tensão. Os resultados
obtidos estão representados na figura 5.3, seguida pela descrição processual da simulação.
Figura 5.3 – Simulação do módulo base da função “AVR”
Descrição do processo simulado
1)
Definição do valor da tensão de referência (PRM_VLT_REF = 15 kV);
2)
Definição da banda admissível (PRM_BDW = 10 %)
efgh i# i jkl i# i im in# m$o
effp q# r jkl q# r im is# m$o
3)
Definição do tempo de hold da função com característica linear (PRM_DTY → 0) de valor 20s
(PRM_DTI = 20);
4)
Definição do tempo de comutação + tempo de segurança (PRM_TME_CMT = 25);
5)
Definição do tempo de impulso das ordens (PRM_TME_IMP = 5);
6)
Alteração do regime de funcionamento para automático (PRM_WMD → 1);
7)
Função “AVR” activa a sinalização referente ao regime de funcionamento (SNL_001 → 1);
8)
Aumento da potência de carga e consequente diminuição da tensão;
9)
Quando o valor da tensão passa o valor da banda admissível a função inicia o contador
CAL_TME_DVI_OUT;
10)
Decorrido o tempo definido é emitida uma ordem de subir (ORD_UPP_OUT → 1);
70
11)
Após a emissão da ordem inicia-se a comutação e como tal é activado o contador referente à
duração deste processo;
12)
No fim da comutação, a tensão volta a estar dentro da banda admissível e função “AVR”, não
emite qualquer ordem;
13)
Novo aumento da potencia de carga até que a tensão exceda a banda admissível e se dê a
activação do contador;
14)
Desta vez, diminui-se a carga e a tensão volta a estar dentro da banda admissível antes do fim
do tempo de hold, verificando se o contador é interrompido não sendo emitida qualquer ordem;
15)
Diminuição da potência de carga até que a tensão ultrapasse o limite superior admissível;
16)
Atingido o limite, verifica-se o início do contador CAL_TME_DVI_OUT, findo o qual é dada uma
ordem de descer (ORD_DWN_OUT → 1);
17)
Como a tensão continua fora do limite definido são emitidas ordens até que esta esteja dentro
da banda;
18)
Tensão dentro da banda e função “AVR” sem qualquer ordem activa;
19)
Alteração do regime de funcionamento para manual (PRM_WMD → 0), a qual é repercutida na
sinalização (SNL_001 → 0);
20)
Nova diminuição da potência e consequente aumento da tensão;
21)
Apesar de a tensão passar o limite definido, a função não activa o contador nem emite ordem,
uma vez que o regime de funcionamento é o “Manual”.
Simulação da sub função “Bloqueio por mínimo de tensão”
A simulação do bloqueio por mínimo de tensão foi realizada em diferentes fases de forma a
testar todas as suas funcionalidades. Apesar de ser a mesma estrutura utilizada no ponto anterior, os
valores neste caso foram propositadamente exagerados de forma a melhor observar o
comportamento da função “AVR” na situação testada.
Figura 5.4 – Resultado da simulação da sub-função “Bloqueio por mínimo de tensão”
71
Descrição do processo simulado
1)
Definição do tipo de input em percentagem para o valor máximo (PRM_VLT_MIN_MDE → 0);
2)
Definição do tempo que a função espera antes de activar o bloqueio (PRM_VLT_MIN_TME =
10s);
3)
Definição do valor limite que activa o bloqueio (PRM_VLT_MIN_VLE = 60%)
ef q# n tuv q" n im ro
4)
Enable da funcionalidade de “BMT” (PRM_VLT_MIN_ENB → 1);
5)
Aumento da potência de carga de forma a diminuir a tensão no barramento secundário;
6)
Excedido o limite admissível é activado o timer;
7)
Findo esse tempo é activado o bloqueio por mínimo de tensão (ORD_VLT_MIN → 1);
8)
Diminuição da potência de carga verificando-se o aumento da tensão, reset do timer e inibição
da ordem de bloqueio por mínimo de tensão (ORD_VLT_MIN → 0);
9)
Enable da emissão de sinalização perante as ordens de “BMT” (PRM_VLT_MIN_SNL → 1);
10)
Repetição do procedimento de aumento da potência, mas desta vez verifica-se a emissão de
sinalizações quando é activada a ordem “BMT” (ORD_VLT_MIN → 1 e SNL_VLT_MIN → 1);
11)
Diminuição da potência de carga e desactivação da ordem de “BMT” (ORD_VLT_MIN → 0 e
SNL_VLT_MIN → 0);
12)
Novo aumento da potência e consequente activação do timer, no entanto a tensão volta ao
limite admissível, logo é feito o reset do timer e não é emitida ordem;
13)
Alteração do modo de input do valor máximo (PRM_VLT_MIN_MDE → 1);
14)
Definição do valor limite de “BMT” (PRM_VLT_MIN_VLE = 8 kV);
15)
Repetição do procedimento de aumento da potência de carga de forma a verificar a emissão do
bloqueio e sinalização;
16)
Diminuição da potência de carga e consequente desactivação da ordem de “BMT”;
17)
Disable da funcionalidade de “BMT” (PRM_VLT_MIN_ENB → 0);
18)
Repetição do procedimento de aumento da potência de carga, no entanto como a
funcionalidade não está activa verifica-se que o tempo definido é atingido no entanto não é emitida
qualquer ordem ou sinalização.
Teste da interacção com a função “Comando de baterias de condensadores”
O teste da interacção com a função de comando de baterias de condensadores não traduz
todo o procedimento real, uma vez que não foi construído um bloco que simule a injecção de tensão
garantida pela bateria de condensadores, sendo que o comportamento da função “AVR” foi testado
nas diferentes fases da ligação o qual está representado na figura 5.5.
72
Figura 5.5 – Resultado da interacção com a função “Comando de bateria de condensadores”
Descrição do processo simulado
Definição do valor do desvio da tensão durante a ligação das baterias (PRM_CPC_DVI =20%);
1)
wxw
tuv tuv *wxw im q# y im iy$o
Enable da ordem de ligação de bateria de condensadores (ORD_IN_CPC → 1), verificando-se
2)
que a tensão de referência diminui para os 12 kv assim como os respectivos limites máximos e
mínimos;
A função emite ordens de descer até à reposição da tensão dentro da nova banda admissível
3)
(ORD_DWN_OUT → 1);
Quando a tensão volta a estar dentro da banda admissível, é emitida a ordem de fecho do
4)
disjuntor para ligação da bateria (ORD_CPC_OUT → 1) e a tensão de referência volta ao estado
inicial.
2
5)
Quando o funcionamento da função estabiliza, altera-se o valor do desvio da tensão durante a
ligação das baterias (PRM_CPC_DVI = 10%);
wxw
tuv tuv *wxw im q# i im is# m$o
É dada nova ordem de ligação de baterias (ORD_IN_CPC → 1), mas neste caso a tensão
6)
continua dentro da nova banda admissível, logo não é emitida qualquer ordem de descer, sendo
apenas emitida a ordem de fecho do disjuntor de ligação da bateria de condensadores.
2
Como neste caso não existe nenhum bloco que simule a tensão injectada pela bateria de condensadores, quando a
tensão de referência volta ao valor inicial a função “AVR” verifica que a tensão está fora da tensão admissível e emite
uma ordem de subir.
73
Teste da interacção com a função “Deslastre /reposição de tensão”
O teste da interacção com a função “Deslastre /reposição de tensão” foi realizado de acordo
com as indicações do explorador da rede de forma a responder a situações de defeito a montante do
transformador (transporte e geração) nas quais não existe tensão aos terminais do transformador.
Os resultados obtidos estão representados na figura 5.6 e os procedimentos mais importantes
descritos de seguida.
Figura 5.6 – Resultado do teste da interacção com a função de “Deslastre por reposição de tensão”
Descrição do processo simulado
1)
Definição da tomada de referência na segunda posição (PRM_TAP_REF =2);
2)
Enable da função “AVR” alterando o regime de funcionamento (PRM_WMD → 1);
3)
Enable da ordem de deslastre por reposição de tensão (ORD_DRT → 1);
4)
A tensão no barramento caí para o valor zero e a função emite ordens de forma a que a
tomada seja colocada na tomada de referência, neste caso ordens de subir.
5)
Quando a tomada se encontra na posição de referência, a função aguarda até que volte a
tensão ao barramento;
6)
Quando a tensão volta ao barramento o tempo de desvio é comutado para tempo inverso até
que a função de deslastre seja desactivada;
7)
Disable da função de deslastre e consequente alteração para o modo de tempo linear da
característica de tempo desvio.
74
Simulação da funcionalidade “Compensação da queda de tensão”
Como foi referido ao longo deste trabalho, a funcionalidade de “Compensação da queda de
tensão” deve ser dimensionada e activada antes da colocação do transformador em serviço de forma
que o arranque da função “AVR” seja feito de forma suave evitando alterações do tomadas
desnecessárias. Na simulação efectuada, foi utilizada mesma estrutura dos pontos anteriores, logo a
activação da funcionalidade “LDC” gerou uma resposta da função registada na figura 5.7, de
sucessivas alterações de tomadas.
Figura 5.7 – Resultados do teste da funcionalidade “LDC”
Descrição do processo simulado
1)
Definição do valor da resistência (PRM_LDC_NTR = 2,1 Ω) e da reactância da rede
(PRM_LDC_NTX =2,45 Ω);
2)
Enable da funcionalidade LDC.
3)
A tensão do barramento secundário continua a mesma, no entanto a tensão utilizada para o
cálculo do desvio é menor, logo é necessário o ajuste inicial da tomada quando é activado esta
funcionalidade. Neste caso o ajuste é realizado pela função “AVR”, através das sucessivas ordens de
subir representadas até que a nova tensão se encontre dentro do limite admissível.
75
Teste de regulação em paralelo
O teste da regulação em paralelo foi efectuado à semelhança do que acontece nos ensaios
efectuados nas subestações com vários transformadores. A simulação é iniciada de uma situação
estável, posteriormente são dadas ordens manuais consecutivas a um dos transformadores até que
seja excedido o limite admissível e finalmente é activado o regime “automático” do grupo,
consequentemente a função deverá dar ordens ao comutador de tomadas do transformador visado
contrárias às ordens manuais.
Figura 5.8 – Resultados do teste de regulação em paralelo
Descrição do processo simulado
1)
Definição da banda admissível do grupo (GRP_PRM_BDW = 5 %)
efgh i# qm jkl i# qm im im# zm$o
effp q# rm jkl q# r im i{# ym$o
2)
Parametrização do método de regulação como “Minimização de correntes reactivas”
(GRP_PRM_PRL_MDE → 0);
3)
Formação do paralelo de transformadores através do fecho dos disjuntores correctos;
4)
Perante o paralelo verifica-se que a largura de banda admissível é reduzida, uma vez que esta é
modificada de 10% para 5%;
76
5)
Duas ordens de descer manuais para o transformador 1, verifica-se a diminuição da tensão no
barramento e o aumento do valor do desvio utilizado nos cálculo, devido à parcela da regulação em
paralelo (queda de tensão provocada pela corrente reactiva de circulação);
6)
Enable da função “AVR” alterando o regime de funcionamento (PRM_WMD → 1);
7)
Como o valor do desvio está fora da banda admissível é inicializado o tempo de espera da
função (neste caso tempo independente);
8)
Decorrido o tempo é emitida ordem de subir para o transformador 1;
9)
Aumento da carga aos terminais dos transformadores até que o desvio seja novamente
excedido;
10) Findo o tempo de espera é emitida nova ordem de subir para o transformador 1 depois da qual
ambos transformadores ficam na mesma posição de tomadas e consequentemente não existe
corrente circulação entre eles.
Teste das sinalizações e verificações
O teste apresentado neste ponto permite verificar se a função emite as sinalizações e efectua
correctamente as verificações exigidas pelo explorador da rede. De forma a melhorar a visualização
dos resultados do teste e reduzir o numero de comutações da tomada, os valores limites das
posições foram alterados. Desta feita o comutador passa apenas a apresentar 7 posições que variam
da posição 3 à -3, como representado na figura 5.8.
Figura 5.9 – Resultados do teste às sinalizações emitidas pela função
77
Descrição do processo simulado
1)
Enable da função “AVR” através da alteração do regime de funcionamento (PRM_WMD → 1) e
consequente alteração da sinalização 001 (SNL_001 → 1);
2)
Diminuição da potência de carga aos terminais do transformador e consequente aumento da
tensão aos seus terminais;
3)
Excedido o limite máximo e o tempo de hold é emitida uma ordem de descer (SNL_06 → 1);
4)
Após a comutação o transformador verifica que a tomada se encontra na última posição e
emite a sinalização TAP_MIN recebida pela função “AVR”;
5)
Como o valor da tensão continua fora da banda admissível mas o comutador já está na tomada
mais baixa, a função não emite a ordem de descer, mas activa a sinalização SNL_010 → 1 referente
ao topo mínimo;
6)
Aumento da potência de carga, verificando-se a redução no tensão no barramento;
7)
Devido à diminuição da tensão, já não existe necessidade da ordem de descer logo a
sinalização SNL_010 → 0, é desactivada.
8)
Quando a tensão passa o limite mínimo admissível é dada um ordem de subir ao comutador de
tomadas, a sinalização SNL_06 → 1 é activada devido à ordem de subir e o transformador deixa de
informar que se encontra na tomada mínima (TAP_MIN → 0);
9)
A potência de carga é aumentada sucessivamente de forma a gerar sucessivas ordens de subir
até que seja atingida a tomada máxima;
10)
Quando esta é
atingida o transformador
activa a
informação TAP_MAX → 1 e
consequentemente a função “AVR” deixa de emitir ordens de subir, activando a sinalização SNL_011
→ 1, resultado de ser atingido o topo máximo e não ser possível responder à baixa tensão verificada;
11)
Nova diminuição da potência, consequente aumento da tensão no barramento e respectiva
desactivação da sinalização de topo máximo (SNL_011 → 0);
12)
Por fim ainda se simulou a sinalização SNL_012, quando a tomada do comutador se encontra
na posição 2 e se forçou um aumento da tensão.
13)
Emissão da respectiva ordem de descer devido ao aumento da tensão;
14)
No fim do tempo de comutação a tomada continua na posição 2, logo é activada a sinalização
SNL_012;
15)
Alteração do regime de funcionamento de “automático” para “manual”, permitindo assim a
desactivação da sinalização.
78
5.3 Testes Online
O teste online da função “AVR” foi realizado com recurso a componentes que simulam os
dispositivos numa subestação real. As características das ligações e dos diferentes elementos são
apresentadas neste capitulo, assim como os resultados obtidos durante a simulação.
5.3.1 Lista de equipamento utilizado
1 x SIEMENS AK 1703 ACP (secção 4.3.2)
2 x SIEMENS Transducer 7KG6000-8EBNN
2 x SIEMENS Siprotec 7SJ642
5 x Disjuntores MVA de 4 estados
1 x Mala de ensaios
5.3.2 Estrutura da montagem
A simulação é feita de acordo com a estrutura da figura 5.10, na qual é utilizada uma mala de
ensaios para simular as tensões e correntes aos terminais do secundário dos transformadores. Estes
valores são recebidos pelos transdutores 7KG, os quais calculam as diferentes características
associadas às tensões e correntes criadas (potências, frequência e ângulo de potência).
O transdutor apresenta 3 saídas analógicas de corrente com um valor máximo de 20 mA,
indicadas para a ligação à carta de entradas analógicas do autómato AK1703. As 3 saídas
disponíveis são configuradas de forma a conhecer: o módulo da tensão, módulo da corrente e a
potência reactiva gerada pela mala de ensaios. Com estes valores, a automação calcula os restantes
parâmetros (corrente activa, reactiva...) fundamentais para a regulação automática
Em funcionamento, o autómato AK1703 efectua os cálculos da função “AVR” e emite as ordens
de subir e descer pretendidas. Estas são recebidas pela protecção digital 7SJ642 que, devido a uma
programação previamente realizada, simula um comutador de tomadas. Basicamente recebe as
ordens de subir e descer do regulador e codifica a posição actual da tomada BCD.
Figura 5.10 – Esquema da montagem simulada
79
Figura 5.11 – Montagem laboratorial
5.3.3 Características da rede simulada
Nesta secção são apresentadas as principais características da rede simulada.
T01
T02
Tensão Nominal Primária [V]
400
400
Tensão Nominal Secundária [V]
100
100
6,25
6,25
1
1
Instalação do comutador
Primário
Primário
Escalões do comutador
17
17
Tomada de referência
2
2
Tomada máxima
8
8
Tomada mínima
-8
-8
+/ - 1
+ /- 1
Comutador
Transformador
Potência
Característica
Impedância de curto circuito (na tomada principal) [%]
Corrente Nominal Secundário [A]
Passo de comutação [%]
Tabela 5.4 – Características dos transformadores de potência
Potência nominal dos transformadores:
F [W [W /BB / /bW#VB /bY$a
(5.5)
80
Valor da impedância de curto-circuito em ohm
/BB
B#BcVY W#Ybd
F
/bY
(5.6)
F F /bY /bY WYB$a
(5.7)
L B#BcVY Potência nominal do grupo de transformadores
.6>9
F
Considerando que o grupo alimenta uma carga com uma potência nominal e um factor de
potência de 0,9 indutivos é possível calcular agora a impedância de carga
}~B#` B#XY$@
VY#_X$
';' E E
/BB
V_#Yb ?# d
2
WYB ?#
(5.8)
(5.9)
5.3.4 Parametrização da mala de ensaios
De acordo com as características dos dispositivos da figura 5.10 e da tabela 5.4 a mala de
ensaios simula uma rede trifásica equilibrada com 4 condutores, cujos valores nominais das fases
estão presentes na tabela 5.5.
Tensões
i /BB| }~V YB$$
[W
/BB
y | }~/VB V YB$$
[W
s /BB| }~/VB V YB$$
[W
i / }~V YB$a$
Correntes
y / }~/VB V YB$a$
s / }~/VB V YB$a
Tabela 5.5 – Parametrização nominal da mala de ensaios
81
5.3.5 Parametrização do transdutor 7KG6000-8EBNN
Considerando a rede equilibrada apresentada na secção anterior, os transdutores são
configurados com os valores presentes na tabela 5.6 e a sua ligação é feita de acordo com a figura
5.11.
Página de configuração
Measuring Device: Basic
Parameters
Descrição do parâmetro
Parâmetro utilizado
Connection
Four wire balanced
Nominal Frequency
50 Hz
Nominal Input Voltage
Nominal Input Current
Output 1
Output 2
Output 3
Without transformer
0-90 V
Without transformer
0 -2 A
Measured
Voltage
Mesuring
L1 - N
Measuring Range
0 to 90 V
Output Signal
0 to 20 mA
Output Signal - Limitation
-4 to 24 mA
Measured
Current
Mesuring
L1
Measuring Range
0 to 2 A
Output Signal
0 to 20 mA
Output Signal - Limitation
-4 to 24 mA
Measured
Reactive Power
Mesuring
Sum
Measuring Range
-540 to 540 VAr
Output Signal
0 to 20 mA
Output Signal - Limitation
- 4 to 24 mA
Tabela 5.6 – Configuração dos transdutores 7KG6000
Figura 5.12 – Ligação do transdutor 7KG6000
82
5.3.6 Parametrização do menu de configuração
A tabela 5.7 apresenta a configuração base da função “AVR” utilizada na simulação.
Descrição do parâmetro
T01
T02
G01
Manual
100
1
3
Linear
20
30
3,57
30
5
2
15
OFF
2,1
2,45
1
-
Manual
100
1
3
Linear
20
30
3,57
30
5
2
15
OFF
2,1
2,45
1
-
Manual
100
2
3
Linear
20
10
OFF
1,05
1,22
-
ON
[%]
60
2
ON
ON
[%]
60
2
ON
*
-
ON
[%]
140
2
ON
ON
[%]
140
2
ON
*
-
ON
[%]
140
2
ON
ON
[%]
140
2
ON
*
-
Formato do valor máximo de corrente admissivel
Llimite para máximo de corrente admissivel
Tempo de hold até a emissão da ordem de abertura de disjuntor [s]
Sinalização de “Corrente reactiva de circulação”
-
-
ON
[%]
10
10
ON
Modo de regulação em paralelo
Definição do master
Sincronismo automático de tomada
-
-
Min. CRT
1
OFF
Regime de funcionamento
Tensão de referência [V]
Corrente referência [A]
Banda admissível [%]
Tipo de delay
Tempo de hold [s]
Tensão mínima de bloqueio da função “AVR” [%]
Impedância de curto circuito [Ω]
Tempo de comutação [s]
Tempo de Impulso [s]
Tomada de referência
Desvio com a ligação da bateria de condensadores [%]
Compensação de tensão na linha
Resistência da rede [Ω]
Reatância da rede [Ω]
Modo de recepção de valores do exterior
Valor do primário do TT [kV]
Valor do secundário do TT [V]
Valor do primário do TI [A]
Valor do secundário do TI [A]
Sub função “Bloqueio por Mínimo de Tensão”
Formato do valor minimo de tensão admissível
Valor minimo de tensão admissivel
Tempo de hold para activar o bloqueio por minimo de tensão [s]
Sinalização de “Bloqueio por Mínimo de tensão”
Sub função “Máximo Tensão”
Formato do valor máximo de tensão admissivel
Valor limite para máximo de tensão admissivel
Tempo de hold para activar o bloqueio “Máximo tensão [s]
Sinalização de “Máximo de Tensão”
Sub função “Máximo Corrente”
Formato do valor máximo de corrente admissivel
Llimite para máximo de corrente admissivel
Tempo de hold para activar o bloqueio “Máximo de Corrente” [s]
Sinalização de “Máximo Corrente”
Sub função “Corrente reactiva de circulação”
3
Tabela 5.7 – Configuração da função "AVR" para a simulação online
3
As funcionalidades marcadas com * não estão configuradas para analisar os valores do grupo de regulação
nesta simulação, mas a função “AVR” desenvolvida permite a sua análise.
83
5.3.7 Descrição de ligações da régua de bornes
As tabelas desta secção apresentam as ligações efectuadas nas réguas de bornes das
diferentes variáveis.
Entradas digitais - DI
IO
Borne
Carta I - Transformador 1
D00
1
Bit 1 da codificação da posição da tomada
D01
2
Bit 2 da codificação da posição da tomada
D02
3
Bit 3 da codificação da posição da tomada
D03
4
Bit 4 da codificação da posição da tomada
D04
5
Bit 5 da codificação da posição da tomada
D05
6
Bit 6 da codificação da posição da tomada
D06
7
Bit 7 da codificação da posição da tomada
D07
8
Comutador - Indicação tomada mínima
D08
9
Comutador - Indicação tomada máxima
D09
10
Comutador - Indicação de alteração tomada
D10
11
Reserva
D11
12
Regime de funcionamento (Man/Automático)
D12
13
Enable do LDC
D13
14
Enable do "Bloqueio por mínimo de tensão"
D14
15
Enable do "Máximo de tensão"
D15
16
Enable do "Máximo de corrente"
D16
17
Ordem manual de subir
D17
18
Ordem manual de descer
D18
19
Entrada 19
...
...
...
D52
53
-
Estado “Fechado” – Disjuntor T01
D53
54
-
Estado “Aberto” – Disjuntor T01
D54
55
-
Ordem“Fechar” – Disjuntor T01
D55
56
-
Ordem“Abrir” – Disjuntor T01
D56
57
Estado “Fechado” – Ordem DRT
Estado “Fechado” – Sec. barras
D57
58
Estado “Aberto” – Ordem DRF
Estado “Aberto” – Sec. barras
D58
59
Ordem“Fechar”
Ordem“Fechar” – Sec. barras
D59
60
Ordem“Abrir”
-
D60
61
Estado “Fechado” – Disjuntor ligação BC
Estado “Fechado” – Disjuntor T02
D61
62
Estado “Aberto” – Indicação de ligação de BC Estado “Aberto” – Disjuntor T02
D62
63
-
Ordem“Fechar” – Disjuntor T02
D63
64
Ordem“Abrir”
Ordem“Abrir” – Disjuntor T02
PM0
65
Polaridade + 110 Vcc
COM0
66
Polaridade - 110 Vcc
PM1
67
Polaridade + 110 Vcc
COM1
68
Polaridade - 110 Vcc
...
...
...
PM7
67
Polaridade + 110 Vcc
COM7
68
Polaridade - 110 Vcc
Carta II - Transformador 2
Tabela 5.8 – Ligações das cartas de entradas digitais nas réguas de bornes
84
Carta de Entradas Analógicas
Byte
Carta
AI00
AE01
AI01
AE01
AI02
AE01
AI03
AE01
AI04
AE01
AI05
AE01
AI06
AE01
...
...
AI15
AE01
ME
Borne
IN V00+
1
IN V00-
2
IN V01+
3
IN V01-
4
IN V02+
5
IN V02-
6
IN V03+
7
IN V03-
8
IN V04+
9
IN V04-
10
IN V05+
11
IN V05-
12
IN V06+
13
IN V06-
14
...
...
DESCRIÇÃO
T01 - Tensão simples
T01 - Corrente de fase
T01 – Potência reactiva
T02 - Tensão simples
T02 - Corrente de fase
T02 – Potência reactiva
Medida 7
...
IN V15+
31
IN V15-
32
Medida 16
Tabela 5.9 – Ligações da carta de entradas analógicas na régua de bornes
Carta de saidas digitais
Byte
Carta
BO
Borne
Descrição
CO00
CO01
CA00
1
T01 - Ordem de subir
CO01
CO01
CA01
2
T01 - Ordem de descer
CO02
CO01
CA02
3
T01 - Ordem de fecho do disjuntor da bateria de condensadores
CO03
CO01
CA03
4
T01 - Ordem de abertura do disjuntor de barras
CO04
CO01
CA04
5
T02 - Ordem de subir
CO05
CO01
CA05
6
T02 - Ordem de descer
CO06
CO01
CA06
7
T02 - Ordem de fecho do disjuntor da bateria de condensadores
CO07
CO01
CA07
8
T02 - Ordem de abertura do disjuntor de barras
CO08
CO01
CA08
9
Saída 9
...
...
...
...
...
CO15
CO01
CA15
16
Saída 16
CO01
COMA
17
Polaridade + 110 Vcc
CO01
COMA
18
Polaridade + 110 Vcc
Tabela 5.10 – Descrição das ligações da carta de saídas digitais na régua de bornes
85
5.3.8 Descrição de ligações da protecção 7SJ63
A tabela 5.11 contém as diferentes ligações da protecção 7SJ a funcionar enquanto comutador
de tomadas.
Posição na régua
Ligação
F5
U+
F6
RAT – UC31 – BCD 1
F7
U+
F8
RAT – UC32 – BCD 2
Entrada digital da AK1703
F9
RAT – UC31 – BCD 4
Entrada digital da AK1703
F10
RAT – IO4 – Raise
Saída digital da AK1703
F11
RAT – IO6 – Low
Saída digital da AK1703
F14
U-
Ligação aos - 110 V
J2
U+
Ligação aos + 110 V
J3
RAT – UC30 – BCD 8
J8
U+
J9
RAT – UC30 – BCD 10
Entrada digital da AK1703
J11
RAT – UC16 – BCD 20
Entrada digital da AK1703
J12
U+
Descrição
Ligação aos + 110 V
Entrada digital da AK1703
Ligação aos + 110 V
Entrada digital da AK1703
Ligação aos + 110 V
Ligação aos + 110 V
Tabela 5.11 – Ligações da 7SJ enquanto comutador de tomadas
5.3.9 Cálculos auxiliares
Nesta secção são calculados os valores utilizados na regulação automática de tensão nas
diferentes situações simuladas. Os valores da tensão, corrente e potência utilizados nesta secção são
obtidos através da folha de cálculo “Cálculos Correntes Reactivas” apresentado no anexo 1,
parametrizada com os valores presentes na secção 5.3.3 – Características da rede simulada.
Compensação da queda de tensão em linha (LDC)
As primeiras equações apresentadas permitem determinar as quedas de tensão na linha,
quando se considera a compensação destas (LDC). Para estes cálculos considerou-se que os
transformadores se encontram na tomada de referência e que a parcela XQ é somada à parcela RP,
uma vez que, os transformadores entregam potência a uma carga indutiva. Assim sendo, em
funcionamento individual a queda de tensão é:
G H V#/ /YX#`V V#XY bX#_c
Y"/W$
E E
``#/Y
(5.10)
G H /#BY WB`#_Y /#VV /X`#cb
Y"/W$
E E
``#/Y
(5.11)
E em paralelo:
86
Ligação de bateria de condensadores
Por sua vez, nas equações 5.12 e 5.13 são calculadas as tensões de referência durante os
instantes que antecedem a ligação da bateria de condensadores. Em funcionamento individual
I
5
1/ G A
/Y
3 5 -/ 0 /BB _Y$
/BB
/BB
(5.12)
E em funcionamento em paralelo
I
5
1/ G A
/B
3 5 -/ 0 /BB `B$
/BB
/BB
(5.13)
Verificação de limites
O limite por mínimo de tensão, quando o valor é definido em percentagem:
= 5 (=
=
cB
/BB cB$
/BB
/BB
(5.14)
Valor da tensão que activa a sub-função “Máximo de tensão”:
=' 5 (=
='
/XB
/BB /XB$
/BB
/BB
(5.15)
Valor da corrente que activa a sub-função “Máximo de corrente”:
='
5
(=
='
/BB
/
/XB
/#X$a
/BB
(5.16)
Regulação em paralelo
Valores das tensões, correntes e potências, de acordo com as posições da tomada, calculados
com a folha de cálculo “Cálculos Correntes Reactivas”.
Posição das
tomadas
T01 – 2
T02 – 5
T01 – 2
T02 – 4
T01 – 2
T02 – 3
T01 – 2
T02 – 2
T01 – 2
T02 – 1
T01 – 2
T02 – 0
Transformador 1
Transformador 2
Tensão no
barramento
[V]
Corrente no
secundário [A]
Potencia
reactiva [VA]
Corrente no
secundário [A]
Potência
reactiva [VA]
100,610
1,113
107,917
1,154
119,247
100,124
1,074
96,779
1,099
104,304
99,638
1,037
85,744
1,048
89,501
99,152
1,002
74,861
1,002
74,837
98,666
1,121
111,810
0,960
60,312
98,180
1,266
148,393
0,925
45,927
Tabela 5.12 – Valores da simulação para transformadores em paralelo
5.3.10 Resultados
Os resultados obtidos durante as simulações realizadas em laboratório foram registados no
documento “Verificações funcionais da função AVR”, criado para o efeito, e devidamente validados no
local. No anexo 3 estão a digitalizações deste documento após o seu devido preenchimento.
87
6. Conclusões
6.1 Observações finais
Findo este trabalho conclui-se que a função de regulação automática desenvolvida permite
regular múltiplos transformadores, em funcionamento individual ou em paralelo, com apenas uma
unidade de automação, de acordo com os objectivos propostos e as exigências definidas pelo
explorador da rede e pela empresa Siemens.
A função consegue operar em subestações com uma configuração máxima de: 5
transformadores; 2 barramentos de saída; 2 escalões de bateria de condensadores e o deslastre de
toda a subestação ou apenas da carga ligada a um dos barramentos. A interação com as funções de
comando de baterias de condensadores e deslastres é feita através de recepção/ emissão de ordens
entre funções garantindo assim, a correcta execução dos respectivos programas.
Em termos da compensação da queda de tensão em linha, a função consegue realizar os
cálculos para cada transformador a funcionar individualmente ou de um grupo de regulação através
da correcta parametrização das características da linha(s) ligadas na saída da subestação.
Por sua vez, a regulação de transformadores em paralelo pode ser feita de duas formas:
Master/ follower e Minimização de correntes de circulação, cujo funcionamento depende da
parametrização do utilizador, de acordo com a situação em causa.
A verificação das funcionalidade da automação foi feita de acordo com as exigências do
explorador da rede de distribuição (EDP) e as características adicionais sugeridas pela empresa
Siemens. No entanto, concluiu-se que existem algumas características que deverão ser optimizadas,
caso esta solução seja utilizada numa subestação de distribuição em serviço. A título de exemplo: a
dificuldade alterar a parametrização da função após o seu arranque – secção 6.1.
Em suma, a automação desenvolvida é uma solução altamente parametrizável, baseada em
pesquisas na área de automação e nos actuais sistemas disponíveis, capaz de responder aos
desafios implícitos na regulação automática de tensão de uma forma optimizada.
6.2 Propostas futuras
Ao longo da execução deste trabalho surgiram ideias de funcionalidades úteis na utilização da
função de regulação automática desenvolvida, que podem ser alvo de estudos futuros neste campo e
uma mais valia nas características da função.
A função “AVR” é altamente configurável e o autómato utilizado não apresenta qualquer visor
ou teclas que permitam a alteração destas variáveis. Neste caso, as alterações têm de ser efectuadas
directamente na instância “AVR” da função de regulação através da alteração do valor da variável.
Perante esta situação propõe-se a criação de uma página de configuração dedicada a esta função,
cujo “rascunho” da interface é apresentado na figura 6.1.
A página web mascararia as variáveis de parametrização utilizadas na função e receberia as
medições e sinalizações do autómato, permitindo desta forma apresentar os valores instantâneos
envolvidos no processo e alterar os parâmetros de configuração remotamente.
88
Figura 6.1 – Proposta da página de gestão da função “AVR”
O clique sobre a figura do transformador ou sobre os botões do lado direito da imagem,
permitiria o acesso à página de configuração do autómato – figura 6.2. Aqui seriam apresentadas
todas as variáveis passíveis de serem configuradas sobre a forma de tabela existindo uma combobox
para as opções fechadas (manual /automático...) e uma value box para as opções de entrada livre
(tensão de referência, banda admissível..). De destacar ainda, a existência de uma zona com um
símbolo de interrogação - ? – que permitiria mostrar informação sobre cada variável e indicar quais os
valores recomendados para cada uma delas.
Figura 6.2 – Proposta da página de parametrização da função “AVR”
89
Anexos
Anexo 1 – Cálculo de correntes reactivas de circulação
As correntes reactivas de circulação constituem um desafio na regulação automática de tensão
sublinhado ao longo deste trabalho. Para perceber a dimensão envolvida nesta questão, foi criado o
ficheiro de Excel - “Cálculo de correntes de circulação”, que permite determinar as correntes de
circulação de acordo com a equação 2.12. Nesta folha de cálculo é possível configurar diferentes
parâmetros – figura 0.1 – cuja alteração se reflete nos valores presentes na tabela 0.1.
Figura 0.1 – Parametrização do ficheiro de cálculo
Os valores da figura e da tabela resultam de um cálculo efectuado com base num dos
transformadores utilizados na simulação do capítulo 5.1. Na figura 0.1 são apresentadas as
características para os cálculos, ou seja, dois transformadores e comutadores com as mesmas
parametrizações. Por sua vez, a tabela 0.1 contém as respectivas correntes de circulação em
amperes, de acordo com a posição da tomada de cada um dos comutadores.
Analisando os valores da tabela, percebe-se que nos casos extremos (tomada máxima para
um transformador e tomada mínima para o outro) as correntes de circulação atingem valores na
ordem do kiloampere. Considerando uma corrente nominal de 385 A – equação 5.1 – conclui-se que
as correntes de circulação constituem um verdadeiro problema que pode levar à saturação dos
transformadores, aquecimentos excessivos, actuação constante das protecções, etc.
Tabela 0.1 – Resultado do cálculo das correntes reactivas de circulação
90
Anexo 2 – Esquema de ligação de blocos
Ao longo do capítulo 4 são apresentados os vários blocos criados para desenvolver a função
“AVR”, assim como, são descritas as suas ligações. Para clarificar a forma como os diferentes blocos
se ligam, são ilustradas nas figuras 0.2 e 0.3 as principais estruturas criadas.
A figura 0.2 é respeitante à instância “AVR”. Esta constitui a base de funcionamento da função
de regulação automática de tensão onde são instalados os principais blocos. A estrutura
representada demonstra que é possível dimensionar o número de transformadores, através da
colocação ou eliminação do grupo de blocos para cada transformador.
Figura 0.2 – Esquema de ligações da instância “AVR”
Por sua vez, a figura 0.3 ilustra as ligações do bloco “BLC4.0_TRF” o qual agrega os diferentes
blocos envolvidos nos cálculos das ordens para cada transformador.
Figura 0.3 – Esquema de ligações do bloco “BLC4.0_TRF”
91
Anexo 3 – Verificação da simulação online
Neste anexo são apresentados os registos elaborados durante os testes realizados em
laboratório.
92
93
94
95
96
97
Referências
1. Sucena Paiva, José Pedro. Redes de Energia eléctrica- Uma análise sistémica. : IST Pres, Abril
2005, pp. 129-131.
2. Guia técnico de subestações de distribuição. [Online] http://paginas.fe.up.pt/~ee97153/.
3. Haussel, Werner e Offergeld, Peter. REGSys - Parallel Regulation. Nürnberg : a-eberle, 2002.
I505D201-00.
4. Gmbh, Maschinenfabrik Reinhausen. TAPCON260 - Operating Instructions. Germany :
Maschinenfabrik Reinhausen Gmbh. BA 261-029/01.
5. Computer dedicated voltage regulation metohd for distributions substations. Groding, Robert. s.l. :
IEEE Transactions on Power Apparatus and Systems, 1981, Vols. PAS-100, No. 5.
6. Automatic voltage control relays and embedded generation. Thomson, Murray. s.l. : Power
Engineering Journal, June 2000.
7. Usida, Wesley Fernando. Controle Fuzzy para Melhoria do Perfil de Tensão em Sistemas de
Distribuição de Energia Elétrica. Dissertação de Mestrado. São Paulo : Escola de Engenharia de São
Carlos - Universidade de São Paulo, 2007.
8. Instalações AT e MT. Subestações de Distribuição - Função de automatismo: “regulação de
tensão”. INTS, ICTS, ISTS, DNT. Coimbra : EDP Distribuição – Energia, S.A., Fevereiro 2007. DEFC13-555/N.
9. Sucena Paiva, José Pedro. Redes de Energia eléctrica- Uma análise sistémica. Lisboa : IST
Press, Abril 2005, pp. 414-417.
10. Usida, Wesley Fernando. Estratégias para Regulação de Tensão em Transformadores com
Comutação de TAP. [Online] 26 de Agosto de 2008.
http://143.107.235.69/index.php?option=com_content&view=article&id=10:estrategias-para-regulacaode-tensao-em-transformadores-com-comutacao-de-tap&catid=7:qualidade-da-energiaeletrica&Itemid=19.
11. BCU500 - Unidade de controlo de painel. Efacec. Maia : s.n.
98