Mestrado Integrado em Engenharia Electrotécnica e de Computadores
Electrónica Industrial 2006/2007
Controlo de Motor CC
Relatório
1
2
1. INTRODUÇÃO
O objectivo deste trabalho é o estudo e simulação de um sistema de controlo de um motor de
corrente contínua de 24V (MAXON RE40). O sistema deve permitir controlar a velocidade e o sentido de
rotação do motor, bem como limitar a corrente de arranque. Neste trabalho estão incluídas as
seguintes tarefas:
1) Escolha da topologia do conversor;
2) Escolha dos semicondutores;
3) Dimensionamento dos dissipadores;
4) Dimensionamento do circuito de comando;
5) Dimensionamento do circuito de controlo;
6) Simulação do conversor com uma carga associada (PSIM)
7) Simulação do “drive” com os semicondutores (PSPICE)
8) Simulação do dissipador (PSPICE)
2. REALIZAÇÃO EXPERIMENTAL
2.1 Fundamentos
Análise de funcionamento do motor:
As equações que descrevem o funcionamento do motor são:
{ TE = TLOAD + J.
TE – binário gerado motor
w - velocidade angular
kt – constante de binário do motor
ke – constante de tensão do motor
kE = ke.If
kT = kt.If
+ B.𝜔
Se assumirmos um regime estacionário, não há variação de corrente, logo:
3
=
=
Analisando a expressão para a velocidade angular do rotor conclui-se que, excluindo a queda de
tensão em Ra, w mantém-se constante independentemente da carga aplicada ao motor. O controlador
deve regular não só a velocidade do motor como também o sentido de rotação. Para além disso,
devemos ter em consideração que em qualquer dos sentidos de rotação a corrente pode ter sentidos
opostos, conforme o motor esteja a funcionar normalmente ou então como gerador, fornecendo
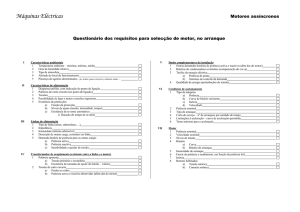
corrente, o que acontece no caso de este estar a travar. Concluímos, portanto, que o controlador terá
que operar em quatro quadrantes, conforme é ilustrado na seguinte figura.
GERADOR
GERADOR
4
2.2 Escolha da topologia
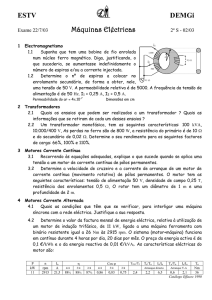
A topologia a usar será a do conversor em ponte completa (full-bridge) que foi apresentada nas
aulas electrónica industrial, onde a corrente fornecida pelo motor pode circular pelos díodos que estão
em paralelo com os mosfets:
Os MOSFETs comutam em pares cruzados (T1-T4 e T2-T3) de forma a que Vout = (Va-Vb) =
+Vin para T1-T4 ligados e Vout = -Vin para T2-T3 ligados. Comutando os dois pares a uma dada
frequência com um duty cicle variável, é possível obter tensões de saída entre -Vin e +Vin (no caso do
comando bipolar).
V
ton
toff
Vi
δT
T
t
Vout =
(Vi.
– Vi.
) = Vi.(
-
)
Vout = Vi(2.𝛅 – 1)
-Vi
Conclui-se então que o sentido de rotação e a velocidade do motor são controlados pelo duty cicle.
Geração do sinal de controlo das gates
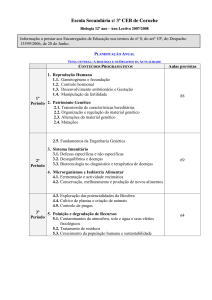
O sinal de controlo das portas dos transístores é gerado comparando uma tensão com forma de
onda triangular (Vtri) com uma única tensão de controlo (Vctrl), obtendo assim um comando bipolar.
5
Analisando a figura:
Vtri(t)=[VtriMAX/(T/4)]*t
Vctrl=Vtri(t1)= [VtriMAX/(T/4)]*t1
t1=(Vctrl*T)/(VtriMAX*4)
ton=2*t1+T/2
δ =ton/T=½+2t1/T
δ= ½ + (2/T)(Vctrl/VtriMAX)*(T/4)
δ = ½*(1+Vctrl/VtriMAX)
Vout = Vi(2.𝛅 – 1)
Vout = Vi.Vctrl/VtriMAX
Como
Vi/VtriMAX
é
constante,
assumimos Vout = k.Vctrl. Controlando
esta tensão, controlamos também a
tensão no motor.
2.3
Dimensionamento
componentes
dos
2.3.1
Dimensionamento
dos
MOSFETs (díodos integrados –
FREDFET).
Com base nas especificações do motor,
Vmax = 24V
In = 5.77 A
Iarranque = 75 A
Como foi referido anteriormente a corrente de arranque é limitada a 20A, a máxima tensão que
o mosfet pode ter aos seus terminais é de 24V. Podemos portanto dimensionar os MOSFETS de acordo
com isso. Foi escolhido o “HUFA76413D3”, que admite uma Tensão de 60V e uma corrente máxima de
20A. De notar que este mosfet tem já integrado o díodo em paralelo que é necessário para que a
corrente possa circular quando o motor funciona como gerador e o conversor funcione assim em quatro
quadrantes.
6
2.3.2 Dimensionamento do dissipador.
Foi usado um único dissipador para os quatro MOSFET. A potência dissipada pode ser calculada
atendendo à datasheet do mosfet:
Pcondução = Ron Inominal2
Ron(max)=0.056 𝛺
Inominal = 5.77 A
Pcondução = 0.056 5.772 = 1.864W
Pcomutação = ½
Inominal
tf
+½
Vi Inominal
tr
tf = 0.55 10-7 s
tr = 1.72 10-7 s
Vi = 24V
T = 2 10-5
Pcomutação = 0.786 W
Pdissipada = 4
(Pcomutação+ Pcondução) = 10.6 W (4 fets)
Para uma tempertura maxima de 80ºC no dissipador: Rthd=(80-40)/10.6; Rthd = 3.78 K/W
Baseado nesta resistencia térmica foi escolhido o seguinte dissipador:
Modelo HT0317779 da Heat Technology Inc.
- 1.54 ºC/W
7
2.3.4 Dimensionamento da electrónica de controlo
Na prática, para gerar o sinal de controlo vamos usar o integrado TL594 que já foi utilizado no
conversor “step-up”, a frequência será de 50KHz que nos dá um CT=10nF e RT=2.2Kohm. Esta
resistência será substituída por um potenciómetro de 4K7 de forma a podermos ajustar melhor a
frequência. É necessário também uma porta NAND (IC5400) para inverter o sinal pois como já sabemos
os mosfets comutam em pares complementados. Além disso surge o problema das fontes dos mosfets
não estarem todas ao mesmo potencial, na verdade existem três potenciais diferentes. Afim de evitar o
uso de três fontes de sinal diferentes vamos aplicar dois integrados com função de “bootstrap”, são
eles os “IR2110”. cada integrado é capaz de operar dois mosfets a potenciais de fonte diferentes,
sendo assim necessitamos de dois. Estes integrados são capazes de fornecer uma corrente de 2A às
gates do mosfets.
O esquema de ligações foi desenhado no Pspice e é apresentado em anexo.
8
3. RESULTADOS E DISCUSSÃO
3.1 Simulação do conversor no PSIM
O conversor foi simulado no Psim com uma máquina DC parametrizada conforme a folha de
características do “Maxon RE 40”. De notar que o fabricante aponta uma corrente de arranque de 75 A
para este motor, a qual vamos obviamente limitar fazendo com que o motor arranque mais lentamente
mas com correntes menores (20 A Max.). Para isso vamos introduzir um circuito limitador na tensão de
controlo (Vctrl) para que esta não varie instantaneamente (dv/dt = 20), garantindo uma variação
graduada do duty-cicle e consequente tensão na saída. Assim a corrente será limitada.
O esquema do Psim é apresentado de seguida:
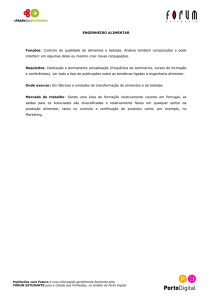
A simulação que aqui apresentamos foi efectuada com binário de carga nominal (0.170 Nm),
duty cicle variável de 1 para 0 aos 250ms, fazendo com que a tensão aos terminais do motor seja de
-24V durante os primeiros 250ms e passe a 24 nos segundos 250ms. È possível observar o momento da
inversão do sentido de rotação aos 250ms bem como o facto de a corrente estar limitada no arranque e
na inversão devido ao limitador dv/dt, sendo que a velocidade do motor tem uma variação lenta.
9
*nota: G(T)=10 ; G(Speed) = 1E-3 ; G(Im) = 1
Pode-se verificar que corrente nominal (regime permanente) Im está no valor apontado pela
folha de características (5.77A), a corrente máxima no arranque é inferior a 20A devido ao limitador, o
binário é o nominal (0.170 Nxm) bem como a velocidade angular (~6500 RPM). Se nestas condições a
carga do motor for alterada, a velocidade mantém-se constante variando a corrente Im. Por outro lado
se variarmos a tensão, a velocidade varia e o binário/corrente em regime permanente mantém-se
constante.
De seguida apresentamos dois cenários com binário de carga nominal mas com duas tensões de
controlo simétricas e diferentes de VtriMax de forma a obter dois duty-cicles simétricos: um entre 0 e ½
e outro entre 1/2 e 1, com a finalidade de verificar velocidades de rotação simétricas e inferiores à
nominal. O binário e corrente media deverão ser iguais aos casos em que duty-cicle = 1 ou 0,
respectivamente.
10
Caso a) 1>δ>1/2
Caso b) 1/2>δ>0
Como as tensões de controlo (Vctrl) são simétricas, os gráficos são também simétricos. Note-se
que os binários e as correntes médias são iguais em módulo aos casos anteriores em que o motor
rodava à velocidade nominal.
11
4. CONCLUSÃO
Após a simulação no psim pode-se concluir que o conversor em ponte completa funciona em
quatro quadrantes. A regulação do duty-cicle faz variar a tensão aos terminais do motor entre +24 e 24V, sendo que V=0 para D=0,5. Além disso a velocidade não varia com o binário de carga aplicado
como esperávamos e a corrente de arranque está limitada como desejávamos. De notar que este
sistema não inclui protecção contra sobreintensidades provocadas por excesso de carga ou pelo simples
facto de o motor ficar preso de alguma forma. Nestas situações a corrente em regime permanente sobe
acima do valor nominal dado pelo fabricante. Sendo assim seria necessario monitorizar a corrente no
motor e incluir um circuito de feedback afim de controlar esta corrente, o qual não foi, para já,
abordado.
O circuito electrónico de controlo não chegou a ser simulado no PSpice, contudo foi feito o
esquema de ligaçoes onde se teve a preocupação de incluir dois integrados “ir2110” de forma a que os
sinais nas gates dos mosfets tenham as referencias de tensão de fonte reais, pois sem isso ficariam
referenciados à massa do circuito global e os mosfets superiores não funcionariam correctamente.
Em conclusão, pode-se afirmar que o conversor em ponte completa é uma boa solução e
reponde as necessidades do controlo dos motores de corrente continua quando se pretende variar a
velocidade e o sentido de rotação.
12