Capítulo 1 MÉTODOS DE ENERGIA
1.1.
INTRODUÇÃO
Em geral, o estudo da mecânica dos sólidos (corpos rígidos e
deformáveis) baseia-se no Método Newtoniano, apoiando-se nas análises
vetoriais, sob diversas condições de carregamentos. Em outras palavras,
empregam-se os conceitos fundamentais de Tensão e Deformação.
De forma alternativa, tal estudo, também pode ser realizado através do
Método Lagrangeano, a partir de análises escalares. Estes conceitos, permitem
uma solução matemática mais agradável para problemas relativos à
deformações e, além disso, extremamente úteis no estudo de peças
submetidas a cargas de choque ou impacto. Vale registrar que este trabalho
dará ênfase no cálculo de deslocamentos (deflexões) a partir dos Métodos de
Energia.
Inicialmente, este capítulo abordará os conceitos primários de trabalho
externo (força e momento) e de energia interna de deformação, priorizando a
fase elasto-linear dos materiais, quando submetidos às tensões normais
(esforço normal e momento fletor) e de cisalhamento (esforço cortante e
momento torçor). Também serão apresentados outros conceitos relativos à
reologia do material, tais como, Tenacidade e Resiliência. Em seguida, será
apresentado o Princípio da Conservação da Energia, igualando o trabalho
oriundo de ações externas com a energia interna provocada pelos esforços
internos. Vale ressaltar que tal princípio é de grande utilidade no cálculo de
deslocamento, apenas em casos que se tem a ação de apenas uma força
aplicada na estrutura. Por fim, apresentam-se o Teorema de Castigliano e o
Princípio do Trabalhos Virtuais para cálculo de deslocamentos lineares e
angulares, considerando um número qualquer de cargas externas, bem como
de quaisquer naturezas.
1.2.
TRABALHO EXTERNO E ENERGIA DE DEFORMAÇÃO
Neste item, será apresentada a definição de trabalho (externo) oriundo de
uma força e de um momento (binário; conjugado), bem como sua relação com
a energia de deformação (trabalho interno) de um corpo.
___________________________________________________________________Capítulo 01 – Métodos da Energia
1.2.1. Trabalho de uma Força
Considerando uma barra com comprimento “L”, submetida a uma força
axial “P”, provoca um alongamento “x”.
P*
x*
Figura 1 - Barra submetido a ação de uma força "P"
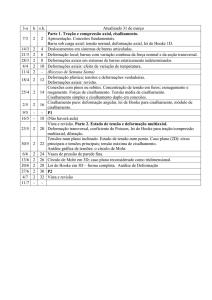
Figura 2 - Curva força-deslocamento
Por definição, tem-se que o trabalho elementar “dT” realizado pela ação
de uma força “P” é dado da seguinte maneira:
∫
(1)
Vale ressaltar que o trabalho externo total (trabalho de deformação) “T”
realizado pela força “P” é numericamente igual a área sob a curva forçadeslocamento, apresentada na Figura 2. Esta grandeza, no Sistema
Internacional de Unidades (S.I.), é representada por “N (Newton) x m (metro)”
ou “J (Joule)”.
Particularizando a análise somente à fase elasto-linear do material (ver
Figura 2) e, considerando que o elemento estrutural esteja submetido
gradualmente a uma ação externa “P”, cujo valor varia de “zero” até um
máximo, igual a “P*”, afirmar-se que, a força “P” é proporcional ao alongamento
“x”. Desta forma, escreve-se:
(2)
Portanto, substituindo a eq. (2) na eq. (1), adequando o limite de
integração e, integrando, tem-se:
∫
(3)
___________________________________________________________________Capítulo 01 – Métodos da Energia
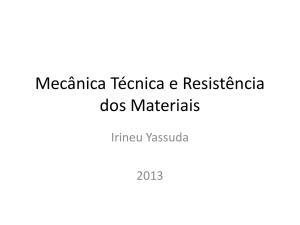
Com base na forma gradual de aplicação da força “P” e, de acordo com
a eq. (3), entende-se que o trabalho (T) realizado é igual ao valor médio da
força “P*” multiplicado pelo alongamento “x*”. Isto pode ser representado
pela hachura sólida (escura), no gráfico da Figura 3.
P
P´
P*
x*
x*
x´
Figura 3 - Fase elasto-linear
Considerando um acréscimo de força axial de tração (P´), provoca no
elemento, um acréscimo de alongamento, igual a (x`) e, desta forma, tem-se
um trabalho (T´) realizado igual a (ver hachura sólida (clara) do gráfico da
Figura 3):
(4)
Portanto, vale observar que para esta nova situação, ou seja, com um
acréscimo de alongamento (x´) e uma força (P*) já aplicada, o trabalho (T)
realizado, torna-se:
(5)
Em resumo, o trabalho total realizado pela ação conjunta das forças (P*)
e (P´) é igual a soma das áreas sob o gráfico da Figura 3, ou seja, a soma dos
valores apresentados pelas equações (3), (4) e (5), dado por:
(
)
(6)
A partir da equação (6), estabelece o Teorema de Clapeyron: “O
trabalho realizado pelas forças externas, variáveis desde zero, em corpo
de material elástico linear e que sofre pequenos deslocamentos, é igual a
___________________________________________________________________Capítulo 01 – Métodos da Energia
metade do trabalho que resultaria se as forças externas agissem de modo
instantâneo”.
1.2.2. Trabalho de um Momento (conjugado)
De forma análoga, o trabalho devido a ação de um momento externo é
dado da seguinte maneira:
∫
(7)
Considerando que o elemento estrutural, na fase elásto-linear, esteja
submetido gradualmente a uma ação externa “M”, cujo valor varia de “zero” até
um máximo, o trabalho realizado será:
(8)
Entretanto, se o momento já estiver aplicado e ocorrer um acréscimo de
momento devido a outros carregamentos, gerando uma rotação adicional “θ*”,
o trabalho realizado será igual a,
(9)
Em resumo, quando as cargas externas são aplicadas gradualmente
(zero a um valor máximo) em um corpo qualquer e, desde que não haja perda
de calor sob forma de energia (fase elástica), diz-se que ocorre conservação de
energia no sistema. Em outras palavras, pode afirmar que o trabalho externo
realizado pelas ações externas converte-se em trabalho interno, agora
denominado por Energia de Deformação. Tal energia, sempre positiva
(força/momento e deslocamento com o mesmo sentido), é armazenada no
corpo pela atuação das tensões normais e de cisalhamento.
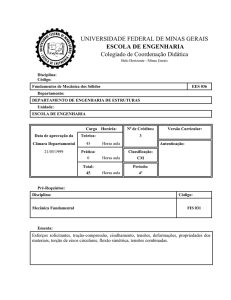
1.2.3. Tensão Normal
De acordo com a Figura 4 e, considerando o material na fase elastolinear, é possível representar a Energia de Deformação em função das tensões
normais.
___________________________________________________________________Capítulo 01 – Métodos da Energia
Figura 4 - Sólido infinitesimal submetido a tensão uniaxial
Considerando um tensão axial atuante na direção “z” (faces superior e
inferior), conforme Figura 4, representa-se a força e, consequentemente, o
trabalho externo, da seguinte maneira:
(10)
Sabendo-se que “dFz” é aplicada gradualmente e crescente, tem-se,
(11)
Substituindo a eq. (10) na eq. (11) e integrando, obtem-se:
∫
(12a)
Rearranjando,
∫
(12b)
Portanto, considerando um sistema conservativo de energia, sob a ação
de uma tensão uniaxial, pode-se escrever a Energia de Deformação (interna),
da seguinte maneira:
∫
(13)
Desta expressão, também define-se Densidade de Energia de Deformação
“u”, como sendo:
(14)
Comparando as eqs. (13) e (14), observa-se que, em relação à tensão
normal, tem-se:
(15)
___________________________________________________________________Capítulo 01 – Métodos da Energia
A eq. (15), considerando “σz” como a tensão normal última (ruptura),
define-se o Módulo de Tenacidade, representando a Energia de Deformação
(interna) por unidade de volume, como sendo o valor necessário para provocar
a ruptura no material. O gráfico abaixo (Figura 5) representa tal valor, ou seja, é
numericamente igual a área sob a curva, considerando o par coordenado
“tensão e deformação de ruptura”.
Figura 5 - Módulo de Tenacidade
A
eq.
(15),
considerando
“σz”
como
a
tensão
normal
de
proporcionalidade, define-se o Módulo de Resiliência, representando a
Energia de Deformação (interna) por unidade de volume, como sendo aquela
que o material pode absorver sem provocar o escoamento no mesmo. O
gráfico abaixo (Figura 6) representa tal valor, ou seja, é numericamente igual a
área sob a curva, considerando o par coordenado “tensão e deformação no
limite superior da fase elasto-linear”.
Figura 6 - Módulo de Resiliência
1.2.3.1.
Força Normal
Um corpo de seção transversal variável “Ax”, submetido a um esforço
externo axial, gera, internamente uma tensão normal “σx”. Tal tensão pode ser
___________________________________________________________________Capítulo 01 – Métodos da Energia
expressa através da relação entre o Esforço Normal “N” e a citada área. Desta
forma, a eq. 13 pode ser escrita como:
∫
(16)
Conforme a Figura 5 e considerando seção transversal constante ao
longo do comprimento “L”, tem-se:
(17)
Figura 7 - Corpo submetido a força axial
1.2.3.2.
Momento Fletor
Para um corpo de seção transversal prismática “A”, submetido a um
momento fletor “M”, gera internamente, uma tensão normal “σx”. Portanto, a
energia de deformação elástica, a partir da eq. 13, pode ser escrita como:
∫
(
)
(18a)
Readequando a equação anterior,
∫
( ) (∫
)
∫
( )
(18b)
Figura 8 - Corpo submetido a momento fletor
1.2.4. Tensão de Cisalhamento
De acordo com a Figura 9 e, considerando o material na fase elastolinear, é possível representar a Energia de Deformação em função das tensões
de cisalhamento.
___________________________________________________________________Capítulo 01 – Métodos da Energia
Figura 9 - Sólido infinitesimal submetido a tensão de cisalhamento
Considerando um estado puro de cisalhamento atuante nas faces do
elemento, representa-se a força correspondente e, consequentemente, o
trabalho externo, da seguinte maneira:
(19)
Sabendo-se que “dFz” é aplicada gradualmente e crescente, tem-se,
(20)
Substituindo a eq. (19) na eq. (20) e integrando, obtêm-se:
∫
(21a)
Rearranjando,
∫
(21b)
Portanto, considerando um sistema conservativo de energia, sob a ação
de uma tensão de cisalhamento, pode-se escrever a Energia de Deformação
(interna), da seguinte maneira:
∫
1.2.4.1.
(22)
Esforço Cortante
Um corpo de seção transversal “A”, submetido a uma ação externa
perpendicular ao eixo “x”, gera internamente uma tensão de cisalhamento “”.
Figura 10 - Corpo submetido a tensão de cisalhamento oriundo da flexão
___________________________________________________________________Capítulo 01 – Métodos da Energia
Considerando um corpo cuja relação entre o comprimento da peça
(trecho de momento fletor de mesmo sinal) e altura não for superior a unidade,
define-se como sendo peça curta. Neste caso, a tensão de cisalhamento
(média) devida ao efeito da flexão, é dada pela relação entre o esforço cortante
“V” e a área da seção transversal, isto é:
(23a)
Desta forma, considerando seção transversal prismática, a energia de
deformação será dada por:
∫
( )
(23b)
De outra forma, para um corpo cuja relação entre o comprimento da
peça e altura seja superior a unidade, tem-se o efeito preponderante da flexão
e, por isso, tal tensão pode ser expressa através da seguinte expressão:
. Assim sendo, a eq. 22 pode ser escrita como:
∫
(
)
(24a)
Rearranjando a equação acima,
∫
( )
(∫ ( )
)
∫
( )
( ∫
)
(24b)
Para facilitar a resolução da integral interna da eq. (24b), define-a como
sendo “fator de forma - fc”, para cisalhamento e, este parâmetro tem o objetivo
de adequar a variação da tensão de cisalhamento ao longo da seção
transversal. Em outras palavras, é um fator adimensional que adequa o valor
máximo da tensão de cisalhamento (na flexão) em relação a tensão média de
cisalhamento, considerando a forma da seção transversal. Seja:
∫
(24c)
Resolvendo a equação acima para algumas seções transversais usuais,
têm-se os seguintes valores:
*Seção retangular:
*Seção circular cheia:
*Seção circular vazada com parede delgada:
___________________________________________________________________Capítulo 01 – Métodos da Energia
Conforme a Figura 10 e considerando seção transversal constante ao
longo do comprimento “L”, tem-se:
∫
1.2.4.2.
( )
(25)
Momento Torçor
Para um corpo de seção transversal variável “Ax”, ligeiramente cônica,
submetido a um momento torçor “T”, gera internamente, uma tensão de
cisalhamento “”.
Figura 11 - Barra não-prismática sob ação de momento torçor
Sabe-se que esta tensão varia linearmente a partir do centro da seção e,
particularmente, a uma distância “”, a tensão de cisalhamento é dada por
Portanto, a energia de deformação elástica, a partir da eq. 22, será:
∫
( )
(25a)
Readequando a equação anterior,
∫
( ) (∫
)
∫
(25b)
Conforme a Figura 12 e considerando seção transversal constante ao
longo do comprimento “L”, tem-se:
(26)
Figura 12 - Barra prismática sob ação de momento torçor
___________________________________________________________________Capítulo 01 – Métodos da Energia
Para o caso geral de Estado Uniaxial de Tensões, têm-se:
∫ (
)
∫ (
)
(27)
1.2.5. Tensão Multiaxial
Para o Estado Multiaxial de Tensões (Figura 13) e considerando o corpo
na fase elasto-linear, determina-se a Energia de Deformação Interna utilizando
a superposição de efeitos. Isto é feito a partir das equações (12a) e (21a). Veja:
∫ (
)
(28)
Lei de Hooke Generalizada,
{
[
(
)]
[
(
)].
[
(
)]
(29a)
(29b)
{
Substituindo as eqs. (29a; 29b) na eq. (28), obtêm-se a equação da
Energia de Deformação Elástica (interna) para o Estado Multiaxial de Tensões:
∫ *
(
)
(
)
(
)+
(30)
O caso particular de Estado Multiaxial de Tensões Principais (Fig. 13b):
∫ *
(
)
(
)+
(31)
Figura 13 - Estado multiaxial de tensões
___________________________________________________________________Capítulo 01 – Métodos da Energia
1.3.
TEOREMAS GERAIS DE DEFORMAÇÕES
Para retomar os conceitos básicos, afirma-se que o Trabalho Externo
“Text” realizado é igual variação da Energia Interna “Uint” de um corpo.
Considerando que um corpo elástico, inicialmente descarregado, seja
submetido ao efeito de forças externas e, desconsiderando troca de calor no
sistema, pode afirmar que o Trabalho Externo é igual a variação da Energia
Interna (cinética e de deformação). Além disso, se o corpo for gradualmente
solicitado (cargas estáticas) e não sofrer deslocamentos de corpo rígido, a
variação da Energia Cinética pode ser desconsiderada. Sendo assim, o
Trabalho Total Externo realizado pelas forças externas é igual a Energia de
deformação Interna armazenada no corpo. A seguir serão apresentados
alguns teoremas importantes, que de alguma maneira se relacionam com o
cálculo de deformações.
1.3.1. Teorema de Maxwell ou da Reciprocidade de Deslocamentos
O Teorema de Maxwell foi postulado por James Clerk Maxwell em
1864. Para a demonstração, considera-se uma viga submetida a duas forças
externas, conforme mostrado na Figura 14.
Figura 14 - Esquema estático de viga - ação de duas forças externas
Inicialmente, considera-se somente a atuação de uma força externa,
sendo aplicada no ponto “C1”, cujo valor varia gradualmente de “zero” a “P1”.
Figura 15 - Esquema estático de viga - ação de "P1"
A aplicação desta força gera deformação na viga e, consequentemente,
provoca os deslocamentos “x11” e “x21”. Tais deslocamentos são proporcionais
entre si, podendo ser escritos da seguinte maneira:
___________________________________________________________________Capítulo 01 – Métodos da Energia
{
(32)
Assim sendo, conforme o Teorema de Clapeyron, tem-se:
(33)
Substituindo a eq. (32) na eq (33),
(34)
Mantendo a aplicação da carga “P1” e, considerando o sistema da Figura
15 em equilíbrio na posição deformada (ver Figura 17 – linha tracejada), aplicase a força externa “P2”, gradualmente, no ponto “C2” (ver Figura 16).
Figura 16 - Esquema estático de viga - ação de "P2"
A aplicação da força “P2” deforma novamente a viga (ver Figura 17 –
linha contínua), provocando os deslocamentos “x12” e “x22”.
Figura 17 - Deformada da viga - sob ação das forças "P1"e "P2"
Tais deslocamentos são proporcionais entre si, podendo ser escritos da
seguinte maneira:
{
(35)
Conforme o Teorema de Clapeyron, tem-se:
(36)
Substituindo a eq. (35b) na eq (36),
(37)
___________________________________________________________________Capítulo 01 – Métodos da Energia
No ponto “C1”, devido o deslocamento “x12” causado pela aplicação da
força “P2”, gera o seguinte valor de energia de deformação (Teorema de
Clapeyron):
(38)
Substituindo a eq. (35a) na eq (38),
(39)
Portanto, a partir da superposição de efeitos, tem-se a energia de
deformação total no elemento, a partir da soma das expressões apresentadas
nas equações (34), (37) e (39):
(40)
Fazendo o inverso, ou seja, aplicando primeiramente a força “P 2” e, em
seguida, a Força “P1”, obtém-se:
(41)
Sabendo-se que a energia de deformação apresentada nas equações
(40) e (41) são iguais, chega-se a seguinte conclusão:
(42)
Desta conclusão, definiu-se o Teorema de Maxwell: “O deslocamento
do ponto “k”, provocado por uma força externa aplicada no ponto “i”, é igual ao
deslocamento do ponto “i”, provocado por uma força externa aplicada no ponto
“k”, desde que as direções das forças e deslocamentos coincidam nos
respectivos pontos”. Do referido teorema, tem-se:
(43)
A figura abaixo ilustra a definição.
Figura 18 - Ilustração da aplicação do Teorema de Maxwell
___________________________________________________________________Capítulo 01 – Métodos da Energia
1.3.2. Teorema de Castigliano
O Teorema de Castigliano (2º Teorema), a seguir demonstrado, foi
postulado pelo engenheiro civil (especializado em ferrovias) Carlo Alberto
Castigliano, em 1873.
Para a demonstração, considera-se uma viga submetida a duas forças
externas, conforme mostrado anteriormente na Figura 14. A partir da equação
(40) ou (41), realiza-se a derivada parcial da energia de deformação em
relação às cargas “Pi”, ou seja, para o caso apresentado, em relação as cargas
“P1” e “P2”. Veja:
{
(44a)
Substituindo as equações (32) e (35) na (44),
{
(44b)
Desta forma, tem-se o 2º Teorema de Castegliano:
(44c)
A expressão acima, apresentada em termos dos esforços solicitantes:
∫
(
)
∫
(
)
∫
(
)
∫
(
)
(45)
Para o cálculo de deslocamento, empregando o Teorema de
Castegliano, adotam-se dois procedimentos:
a) No cálculo do deslocamento de um ponto do corpo, onde exista uma
carga aplicada, cujo valor seja conhecido, considera-se, inicialmente,
uma carga literal “Pj”. Após o cálculo do deslocamento, substitui-se a
carga literal pelo seu valor numérico;
b) No cálculo do deslocamento de um ponto do corpo, onde não exista
uma carga aplicada, considera-se, inicialmente, uma carga literal “Pj”
aplicada no ponto “j” e na direção do deslocamento a ser
determinado. Após o cálculo do deslocamento, substitui-se a carga
literal pelo valor “zero”.
___________________________________________________________________Capítulo 01 – Métodos da Energia