CADERNO DE FÍSICA DA UEFS, 03 (01): 47-59, 2004
CURSO DE DINÂMICA ORBITAL E CONTROLE –
CAPÍTULO
I:
FUNDAMENTOS
DA
MECÂNICA
CELESTE
Antonio Delson de Jesus
Departamento
UEFS
de
Física
-
específica da Matemática. Os tópicos
gerais propostos são, entre outros:
1)
Fundamentos
da
Mecânica
Celeste;
2) Teoria do Potencial;
3) Manobras Orbitais;
4) Problema de 2 corpos;
5) Problema Restrito de 3 corpos;
6) Problema de N corpos;
7) Sistemas de Coordenadas e de
Tempo;
8) Determinação de Órbitas;
9) Teoria das Perturbações Gerais;
10) Satélites Artificiais;
11) Veículo Lançador de Satélite;
12) Teoria da Reentrada;
13) Introdução à Mecânica Celeste
Relativística;
14) Introdução à Propulsão;
15) Introdução à Teoria de Controle,
etc.
Neste Capítulo abordaremos
sobre os Fundamentos da Mecânica
Celeste, discutindo as suas leis
básicas e observando os aspectos
mais relevantes desta teoria.
1. Apresentação e Objetivos
A Dinâmica Orbital é uma
das áreas mais importantes da
Física, visto a aplicabilidade das
suas leis na Mecânica Celeste,
Astronomia, Astrofísica, Cosmologia,
Tecnologia e Engenharia Espaciais.
Seu estudo permite o entendimento
das leis físicas que governam
fenômenos desde os fundamentos do
Universo (formação de planetas,
galáxias, sistemas solares, etc.),
trajetórias e órbitas de veículos
espaciais (satélites, foguetes, space
shuttles, mísseis, etc.) até a
formação de detritos espaciais em
torno do globo terrestre, tópico atual
de singular interesse internacional.
Pretendemos
apresentar
numa
seqüência
de
Capítulos
diversos tópicos de interesse da
comunidade científico dentro da
Dinâmica Orbital, numa linguagem
acessível e simples, contudo não
menos interessante para o leitor. A
conexão da Dinâmica Orbital com a
Teoria de Controle permite-nos
aplicar os seus princípios às
tecnologias e missões espaciais que
demandam
altos
custos
e
necessitam
ser
modeladas
e
implementadas sob uma abordagem
de
otimização.
Neste
sentido,
também estaremos reservando parte
deste estudo para esta área
2. Fundamentos
Celeste
da
Mecânica
2.1 Introdução
A Mecânica Celeste é uma
aplicação das leis universais da
Mecânica Newtoniana ao estudo do
movimento ou equilíbrio dos corpos
47
Curso de Dinâmica Orbital e Controle:
Fundamentos da Mecânica Celeste
Antonio Delson de Jesus
ordem dos erros de observação, não
servindo, portanto, para qualquer
contestação.
Os sucessos do programa
espacial mundial e da Tecnologia em
várias áreas se devem a validade da
Mecânica Newtoniana. Além disso, a
descrição Newtoniana da natureza é
muito simples e não comete erros
significativos.
celestes,
sujeitos
a
forças
gravitacionais.
Podemos dizer que o tema
Mecânica Celeste teve seu início na
publicação de Sir Isaac Newton do
seu Philosophiae Naturalis Principia
Mathematica em 1687, também
chamada
de
Principia.
Neste
trabalho Newton formulou as leis de
movimento e a lei de gravitação
universal, derivou algumas das mais
importantes
propriedades
do
movimento planetário e de satélites.
É claro que a derivação das três leis
de Kepler precederam este trabalho
de Newton por muitos anos. Além
disso, foram os dados de Tycho
Brahe e contribuições pessoais que
permitiram Kepler estabelecer suas
leis. No livro I de Newton ele
escreveu que a força que atua sobre
um planeta deve ser derivada das
leis de Kepler.
Mas, as leis de Newton não
são absolutas; não conseguem
descrever o movimento dos elétrons
em átomos (Mecânica Quântica) e
falham quando as velocidades
envolvidas são compatíveis com a
velocidade da luz (Relatividade).
Contudo, estas limitações não as
tornam inválidas, pois dentro do
domínio no qual elas funcionam,
elas dão uma descrição ótima do
comportamento
dos
objetos
materiais.
Durante muito tempo a lei da
gravitação universal foi considerada
rigorosamente certa para explicar
todos os fenômenos da Mecânica
Celeste, até que Le Verrier observou
que o periélio de Mercúrio avançava
de um valor de 42’’ por século em
relação ao valor predito pela
Mecânica
Newtoniana.
Deslocamentos
similares
foram
observados para Vênus, Terra e
Marte. Porém, para estes últimos, as
discrepâncias eram da mesma
2.2 Hipóteses na Teoria Clássica
da Mecânica Celeste
Na formulação da Mecância
Celeste Clássica algumas hipóteses
foram tomadas, a saber:
a) A
massa
é
considerada
invariante;
b) Admite-se a existência de sistema
de referência inercial no qual são
válidas as leis da Mecânica;
c) A velocidade das interações é
instantânea;
d) O tempo é absoluto, isto é, pode
ser medido simultaneamente em
todos os referenciais inerciais, ou
seja, num dado instante, ele é o
mesmo em todos os referenciais
inerciais;
e) Os corpos sobre os quais as
forças atuam são considerados
puntiformes,
além
do
que
demonstra-se, na Teoria do
Potencial, que todo corpo de raio
finito e cuja distribuição de
massa
depende
apenas
da
distância,
se
comporta
gravitacionalmente como se toda
a
sua
massa
estivesse
concentrada num ponto que é o
seu centro de massa. Assim, o
estudo do movimento desses
corpos se resume no estudo do
movimento de seus centros de
massa. (O caso de corpos
separados por distâncias muito
grandes pode
também ser
48
CADERNO DE FÍSICA DA UEFS, 03 (01): 47-59, 2004
publicou as suas duas primeiras leis
do movimento planetário. A terceira
lei veio um pouco mais tarde, em
1619. As leis de Kepler são:
1) Lei de Kepler: “As órbitas dos
planetas são elipses, tendo o
Sol ocupando um de seus
focos”. (Fig.1)
enfocado
como
massas
puntiformes);
f) O espaço de trabalho é o
Euclidiano
onde
a
menor
distância está contida em uma
reta.
2.3 Sistema de Referência
Um sistema de referência se
constitui
de
um
sistema
de
coordenadas para indicar a posição
de objetos no espaço, mais um
dispositivo para medir o tempo
associado a esta posição. Um
sistema de referência em Movimento
Retilíneo e Uniforme no espaço, isto
é, que não está sujeito a forças
externas, é denominado de sistema
inercial
ou
galileano.
Salvo
declaração contrária, os sistemas de
referência
com
os
quais
trabalharemos neste curso serão do
tipo inerciais.
Fig.1 – Sistema Solar: Órbitas Elípticas dos
Planetas
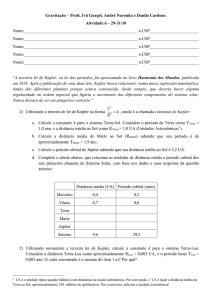
2) Lei de Kepler: “As órbitas dos
planetas são planas e seus
raios vetores varrem áreas
iguais em tempos iguais” (Isto
significa que a área varrida em
um mesmo intervalo de tempo é a
mesma) (Fig.2a,b).
2.4 As Leis de Kepler
Na época de Kepler, e desde a
época de Aristóteles, acreditava-se
que o único movimento “natural” e
“perfeito”
dos
corpos
era
o
movimento circular. Nesta teoria, os
planetas
se
moviam
necessariamente
em
círculos,
girando em trajetórias circulares ou
em
combinações
de
círculos
menores se movendo sobre círculos
maiores.
Mas,
os
dados
observacionais de Tycho Brahe,
examinados por Kepler mostravam
outros
resultados
que
não
conciliavam com esta teoria. A
História diz que de 1601 a 1606
Kepler tentou ajustar várias curvas
geométricas aos dados de Tycho
sobre as posições de Marte.
Encontrou um ótimo ajustamento
para a elipse. A órbita foi
encontrada e em 1609 Kepler
Fig.2 – Órbitas Elípticas: 2a) áreas iguais,
tempos iguais; 2b) detalhe: triângulo aproximado
49
CADERNO DE FÍSICA DA UEFS, 03 (01): 45-58, 2004
Na Figura 2a os arcos PP´ e
QQ´ são percorridos por intervalos
de tempo iguais, segundo a lei de
Kepler. Um infinitésimo de um
destes arcos está representado na
Figura 2b por um triângulo.
Veremos adiante que é fácil
provar que a taxa da área percorrida
por unidade de tempo é dada por:
dA 1 2 df h
= .r .
= = cte (1.1)
dt 2
dt 2
h = momento angular
f = anomalia verdadeira
3) Lei de Kepler: “Os quadrados
dos períodos de revolução dos
planetas são proporcionais aos
cubos dos semi-eixo maiores
das órbitas”
a n3
a13 a 23 a33
=
=
=
...
=
= cte
T12 T22 T32
Tn2
1) Lex motus prima: “Corpus omne
perseverare
in
statu
suo
quiescendi vel movendi uniformiter
in directum, nisi quatenus illud a
viribus impressis cogitur statum
suum mutare”
“Todo corpo permanece ou em
repouso ou em movimento retilíneo
e uniforme, a menos que seja
compelido a mudar esse estado por
forças atuando sobre ele”
2) Lex motus secunda: “Mutationem
motus proportionalem esse vi
motrici
impressae, et fieri
secundum lineam qua vis illa
imprimitar”
“A taxa de mudança do movimento
linear de uma partícula é igual à
força externa atuante na direção e
na magnitude”
ρ
d (m.v ) ρ
=F
dt
(Lei original) (1.2)
⎛ a3
⎜⎜ 2
⎝T
⎞
⎟⎟ = G.(mi + M ) / 4.π 2 ,
⎠i
i = 1,2,3,..., n.
(Lei corrigida) (1.3)
O erro da lei original para a
corrigida é da ordem de 0,0009549 <
0,1% (Kovalevsky,1967), para o caso
de Júpiter que é o planeta mais
massivo. Por outro lado, a aplicação
das leis de Kepler é válida só para o
problema de 2 corpos ou em casos
aproximados.
2.5 As Leis de Newton
As Leis de Kepler eram
apenas uma descrição e não uma
explicação do movimento planetário.
Coube a Isaac Newton desvendar o
porquê do movimento planetário. As
três leis do movimento de Newton
são consideradas os axiomas da
Mecânica. São elas (publicadas no
Principia):
(1.4)
Se m for independente de tempo,
ρ
ρ
ρ
dv
(1.5)
F = m.
= m.a
dt
ρ
onde a é a aceleração da partícula.
3) Lex
motus
tertia:
“Actioni
contrariam semper et aequalem
esse reactionem: sive corporum
duorum actiones in se mutuo
semper esse aequales et in partes
contrarias dirigi”
“A toda ação corresponde sempre
uma reação que lhe é diretamente
oposta; ou, as ações mútuas de dois
corpos são caracterizadas por forças
diretamente opostas” (Fig.3).
ρ
F12
ρ
F21
-------.→------------------------←.------ρ
-- m1
r
m2
Fig.3 – Forças (ação e reação) atuantes sobre
duas massas punctuais
ρ
ρ
onde, F12 = − F21
(1.6)
Curso de Dinâmica Orbital e Controle:
Fundamentos da Mecânica Celeste
Antonio Delson de Jesus
A partir das leis de Kepler, da
gravidade à superfície da Terra e do
movimento da Lua em torno da
Terra, Newton foi levado a enunciar
a Lei da Gravitação Universal, a
saber:
“Duas partículas se atraem com
uma força diretamente proporcional
ao produto de suas massas e
inversamente
proporcional
ao
quadrado da distância entre elas”
Da
Figura
3
podemos
escrever,
i) partículas (massas punctuais)
ii) corpos com simetria esférica
(massa concentrada no centro de
massa)
iii) corpos
assimétricos,
porém
separados por grandes distâncias)
No sistema Terra-satélite o
campo
não-central
deve
ser
considerado. O movimento de um
corpo num campo central e suas
características
serão
estudados
adiante.
ρ
ρ
F12 = −G.m1 .m 2 .r12 / r 3
2.6 Movimento
Central
(1.7a)
ρ
ρ
F21 = −G.m1 .m 2 .r21 / r 3
(1.7b)
ρ
ρ
r = r12 = r21 =
com
módulo
Campo
Introduziremos o movimento
de uma partícula num campo de
força central nesta seção com o
objetivo de obtermos resultados
importantes,
com
os
quais
construiremos
a
teoria
do
movimento de corpos celestes e
satélites artificiais. Nesta seção,
deduziremos preliminarmente as
propriedades do campo de força
central e as equações do movimento
neste campo.
Se uma força atuante numa
partícula de massa m for tal que:
i) ela seja dirigida sempre de m
para um ponto fixo O ou sempre
afastada do ponto O;
ii) a
magnitude
dela
depende
somente da distância r entre a
partícula e o ponto O,
então a força é denominada força
central ou campo de força central
com O como centro da força. Devido
a estas características, a força pode
ser representada por: (Figura 4)
da
distância entre as massas m1 e m2
G
=
constante
universal
da
gravitação, cujo valor conhecido hoje
é (6,670 ± 0,005) x 10-11 N.m2/kg2.
Na época de Newton o valor
estimado de G foi obtido, igualandose a lei de gravitação à da inércia,
G.m.M / R 2 = m.g
(1.8)
onde M - massa da Terra, que foi
calculada na forma,
M = ρ .V =
num
4
.π .R 3
3
(1.9)
O raio da Terra, R, já era
conhecido e a densidade média
conhecida, ρ era de
ρ = 5,67 x 103 kg/m3 e g = 9,81
m/seg2,
portanto, G ≅ 6,4 x 10-11 N. m2/ kg2 ,
que não é muito diferente do valor
conhecido hoje.
A Lei de Gravitação Universal
nesta forma se aplica só no caso de:
ρ
ρ
r
F = F (r ). = F ( r ).eˆr
r
50
(1.10)
CADERNO DE FÍSICA DA UEFS, 03 (01): 47-59, 2004
do fato da força ser central. Para ver
este resultado, tomemos o produto
escalar da expressão (1.11) pelo
Fig.4 – Força central, dirigida para o centro
atrativo O
Assim,
força é dirigida segundo o
versor êr ;
ii) F(r) < 0, se for atração na direção
de O;
iii) F(r) > 0, se for repulsão de O.
i) a
ρ
h
Fig.5 – Movimento planar definido pelo vetor
constante
vetor posição,
ρ ρ ρ ρ ρ ρ ρ ρ
ρ ρ ρ
r ο(r × v ) = r ο h → v ο(r × r ) = 0 = r ο h ⇒ r
→
a um vetor
ρ
constante h . Então o movimento é
2.6.1 Propriedades do Campo de
Força Central
é
perpendicular
planar (ocorre num plano)
Um
caso
particular
ρ ρ
Sob a ação de uma força
central, existem quantidades que se
conservam, isto é, existem as
integrais primeiras do movimento.
Tais integrais permitem simplificar e
mesmo auxiliar a resolução das
equações de movimento. Além disso,
outros resultados também podem
ser obtidos do movimento num
campo
de
força
central.
As
propriedades do campo de força
central são:
Propriedade 1: O movimento da
partícula é planar. (Fig.5).
ρ ρ ρ
ρ
é h = 0 → r × v = 0 → ou r é paralelo
ρ
ρ
a v e o movimento é retilíneo, ou v
ρ
é nulo e r é constante, repouso.
Propriedade 2: O momento angular
da partícula é conservado.
De (1.11) temos que
ρ ρ
ρ ρ ρ
ρ ρ
( r × v ) = h → m.( r × v ) = m.h = H
(1.12)
que é o momentum angular, neste
caso, um vetor constante.
Isto é, o momentum angular é
constante (em magnitude e direção).
Isto significa que qualquer que seja
a forma da função F(r), o movimento
no campo central se processa no
ρ
ρ
plano formado por r e v que é
ρ
ρ
ρ ρ
F = F (r ).eˆr → r × F = r.eˆr × F .eˆr
ρ
ρ
= r.F .eˆr × eˆr = 0
ρ
ρ
ρ ⎛ m.dv ⎞ ρ ρ ⎛ dv ⎞ ρ
r ×⎜
⎟ = 0 → r ×⎜ ⎟ = 0 →
⎝ dt ⎠
⎝ dt ⎠
ρ ρ ρ
ρ ρ ρ
d (r × v )
= 0 → r ×v = h
dt
ρ
perpendicular a H .
Se
o
momentum
ρ
angular H variar, isso implicará uma
ρ
componente de v fora do plano
original, de sorte que um novo vetor
ρ
momento angular, H ' , definirá um
ρ
ρ
vs. v e será
novo plano r
perpendicular a ele.
Propriedade 3: O campo de força
central é conservativo.
(1.11)
Ou seja, a equação (1.11)
mostra
um
vetor
constante
ρ
h sempre perpendicular ao plano
determinado pelos vetores posição e
velocidade. Isto é uma conseqüência
51
Curso de Dinâmica Orbital e Controle:
Fundamentos da Mecânica Celeste
Antonio Delson de Jesus
ρ
Um campo de força F é dito
conservativo se o trabalho realizado
sobre o sistema só depender dos
pontos extremos (inicial e final) e
não depender da trajetória.
O trabalho realizado sobre o
sistema pela força F(r) é definido
por:
W12 = ∫
r2
r1
Fig. 6 – Sistema de eixos para o movimento
plano
Então,
ρ
r = x.iˆ + y. ˆj
(1.15)
Mas, o vetor posição também
pode ser escrito como sendo:
ρ
ρ ρ r2
r ρ r2
F .dr = ∫ F ( r ). .dr = ∫ F (r ).dr
r1
r1
r
ρ
r = r.eˆr → eˆr = cos f .iˆ + sen f . ˆj
(1.16)
(1.13)
Por outro lado, êr é o vetor
tangente a curva r = constante,
portanto,
pois
ρ ρ 1 ρ ρ 1
r ο dr = .d (r ο r ) = d (r 2 ) = r.dr →
2
2
r2
W12 = ∫ F ( r ).dr
r1
eˆt = − sen f .iˆ + cos f . ˆj
(1.14)
Desta forma, temos,
expressão (1.14) mostra que o
trabalho, W12, realizado sobre um
sistema no campo central só
depende dos pontos inicial e final e,
então, o campo de força central é
conservativo.
Certamente,
uma
partícula terá a liberdade de
“escolher” qualquer caminho dentro
do campo de força central para sair
ρ
de um ponto r1 e chegar no ponto
deˆr
df
= eˆt .
dt
dt
ˆ
det
df
= −eˆr .
dt
dt
2.6.2 Equações de Movimento em
Campo Central
⎛ d2 f
dr df
⎜⎜ r. 2 + 2. .
dt dt
⎝ dt
Seja o movimento plano
conforme mostrado na Figura 6,
onde x e y são o sistema de eixos
cartesianos no plano do movimento,
(1.21)
êt é
(1.19)
ρ
ρ dr
dr
df
= eˆr . + eˆt .r.
v=
dt
dt
dt
ρ ⎛ 2
2
ρ dv ⎜ d r
⎛ df ⎞ ⎞⎟
=
− r.⎜ ⎟ .eˆr +
a=
dt ⎜⎝ dt 2
⎝ dt ⎠ ⎟⎠
além de W12.
o versor radial,
(1.18)
Em coordenadas polares, a
velocidade e a aceleração de m são
dadas, respectivamente, por:
ρ
r2 , sem perda ou ganho de energia,
êr é
(1.17)
(1.20)
⎞
⎟⎟.eˆt
⎠
Mas, pela segunda lei de
ρ
Newton, a força resultante, m. a ,
que atua sobre este corpo, num
campo central é a força central
ρ
F ( r ) . Assim,
o versor
transversal perpendicular a êr e f é
o ângulo polar entre o eixo x e o
corpo em movimento. A massa m do
ρ
corpo é localizada pelo vetor r = r.eˆr
num campo central.
2
⎛ d 2r
⎛ df ⎞ ⎞⎟
⎜
m.
− r.⎜ ⎟ .eˆr +
⎜ dt 2
⎝ dt ⎠ ⎟⎠
⎝
⎛ d2 f
dr df ⎞
m.⎜⎜ r. 2 + 2. . ⎟⎟.eˆ f
dt dt ⎠
⎝ dt
= F (r ).eˆr
52
(1.22)
CADERNO DE FÍSICA DA UEFS, 03 (01): 47-59, 2004
Assim,
as
equações
de
movimento de uma partícula no
campo central são:
aproximadamente igual à metade da
área do paralelogramo com lados r e
Δr.
2
⎛ d 2r
⎛ df ⎞ ⎞⎟
⎜
m.
− r.⎜ ⎟ = F (r )
⎜ dt 2
⎝ dt ⎠ ⎟⎠
⎝
1 ρ ρ
ΔA = . r × Δr
2
(1.23)
⎛ d2 f
dr df
m.⎜⎜ r. 2 + 2. .
dt dt
⎝ dt
Dividindo-a por Δt e passando
o limite para Δt→0, temos:
⎞
⎟⎟ = 0
⎠
Fig.7 – Lei das áreas
(1.24)
ρ
1 ρ Δr
ΔA
= λim . r ×
=
Δt →0 Δt
Δt →0 2
Δt
1 ρ ρ 1 2 df
. r × v = .r .
=h
2
2
dt
A
partir
desta
última
equação,
podemos
chegar
ao
resultado
da
conservação
do
momentum angular. Se dividirmos
esta equação por r, temos:
m ⎛ 2 d2 f
dr df
.⎜⎜ r . 2 + 2.r. .
r ⎝
dt dt
dt
(1.26)
λim
(constante)
(1.27)
Mas, esta quantidade é o
módulo
ρ da velocidade areolar,
⎞
⎟⎟ =
⎠
m ⎛ 2 df ⎞
.d ⎜ r . ⎟ / dt = 0
r ⎝
dt ⎠
df
→ m.r 2 .
= m.h = H (constante)
dt
dA dA ˆ 1 ⎛ 2 df
.k = .⎜ r .
=
dt
dt
2⎝
dt
⎞ˆ 1 ρ
⎟.k = .h
2
⎠
(1.28)
Assim, a velocidade areolar é
um vetor constante.
(1.25)
Observemos que em (1.25)
aparece o módulo do momento
angular:
2.6.3 Equação de Binet
ρ ρ
m.(r × v ) =
Para obtermos uma solução
parcial, que nos dirá o tamanho e a
forma da órbita de uma partícula de
massa m num campo de força
central, utilizamos a equação de
Binet, cuja derivação é dada a
seguir:
Tomemos as equações de
movimento (1.23) e (1.25), e façamos
df
⎛ dr
⎞
m. r.eˆr × ⎜ .eˆr + r. .eˆ f ⎟ =
dt
⎝ dt
⎠
df
m.r 2 .
=H
dt
que prova a propriedade 2 do campo
central.
Propriedade 4: A taxa temporal de
variação na área varrida pelo raio
vetor de uma partícula em campo de
força central é constante.
Na Figura 7, supomos que
uma partícula se mova numa
trajetória elíptica, descrevendo um
setor de área ΔA em um intervalo de
tempo Δt. Assim, a área ΔA varrida
pelo vetor posição neste tempo é
uma mudança de variável, r = 1 ,
u
m.r 2 .
53
df
u
df
= H.
=H→
dt
m
dt
Curso de Dinâmica Orbital e Controle:
Fundamentos da Mecânica Celeste
Antonio Delson de Jesus
2
⎡ d 2r
⎛ df ⎞ ⎤
m.⎢ 2 − r.⎜ ⎟ ⎥ = F (r ) →
⎝ dt ⎠ ⎥⎦
⎢⎣ dt
⎡
u 2 ⎛ d 2u ⎞
H2 ⎤
m.⎢− H 2 . 2 .⎜⎜ 2 ⎟⎟ − 2 3 ⎥
m ⎝ df ⎠ m .r ⎦
⎣
1
= F( )
u
2.6.5 Propriedades da Elipse e a
Interpretação das Leis de
Kepler
A
elipse
é
um
lugar
geométrico de um ponto que se
move de forma que sua distância a
partir de um ponto fixo, o foco,
mantém uma relação constante (<1)
com sua distância a partir de uma
linha fixa, a diretriz. De acordo com
a Figura 8, valem as seguintes
definições: r é a distância do foco ao
ponto P, f é o ângulo entre o eixo
origem e o ponto P, centrado no
foco, e < 1 = SP/PM é a
excentricidade, S é o foco, S’ é o
outro foco (virtual), a é o semi-eixo
maior, com AA’=2.a, e b é o semieixo menor, com BB’=2.b.
ou, finalmente,
d 2u
−m
1
+ u = 2 2 .F ( )
2
u
df
H .u
(1.29)
A equação (1.29), conhecida
como equação de Binet, é de grande
importância para o estudo do
movimento
no
plano
(campo
central), pois dado qualquer campo
de
força
central,
pode-se
imediatamente
através
dela
determinar a forma da trajetória do
corpo em tal campo.
2.6.4 Conservação da Energia
num Campo Central
Como
já
sabemos
pela
propriedade 3, o campo de força
central é conservativo. Isto é, ele
pode ser derivado de um potencial.
Nestas circunstâncias, o trabalho
realizado pela força F(r) entre dois
pontos r1 e r2 deve ser igual à
variação de energia potencial entre
estes pontos. Assim,
Fig.8 – Geometria da elipse
As seguintes
também válidas:
e=
r2
W12 = ∫ F ( r ).dr = U (r1 ) − U (r2 ) →
r1
são
CS
CA
F (r ).dr = − dU → U = − ∫ F ( r ).dr
(1.32a)
(1.30)
(1.32b)
Desta
forma,
podemos
concluir que para um campo
central, a energia se conserva e a
energia potencial só depende da
posição. De uma maneira geral, para
forças
conservativas,
podemos
escrever:
ρ
2. p = Q.Q '
r2
relações
2.a = SP + PS ' = cte
r1
(1.32c)
p = a.(1 − e 2 )
(1.32d)
r=
F (r ) = −∇U
(
)
a. 1 − e 2
(1 + e. cos f )
(1.32e)
onde p recebe a denominação de
“semi-latus rectum” .
(1.31)
54
CADERNO DE FÍSICA DA UEFS, 03 (01): 47-59, 2004
A primeira Lei de Kepler diz
que o movimento planetário é
elíptico. Dada a equação da elipse,
temos,
r=
r −1
(
2.6.6 Exemplo de Campo de
Força
Central:
Campo
Gravitacional
)
a. 1 − e 2
→
(1 + e. cos f )
Pela lei gravitacional de
Newton, na teoria de movimento de
um corpo de massa punctual m, ao
redor de um corpo massivo (SatéliteTerra, Terra-Sol, etc), tem-se:
⎛1⎞
d⎜ ⎟
(1 + e. cos f ) → ⎝ r ⎠ = − e. sen f →
=
df
a. 1 − e 2
a. 1 − e 2
(
)
(
)
ρ
− G.M .m
F (r ) =
.eˆr
r2
(1.33)
(1.37)
que é um campo de força central. A
equação da trajetória, como no caso
do campo central, é dada por:
Usando a equação de Binet,
substituindo u =1/r e usando o fato
de que só existe aceleração radial
num campo central, ou seja,
ρ
ρ
r
F ( r ) = F ( r ). , chega-se à expressão:
r
d 2u
−m
1 μ .m 2
+ u = 2 2 .F ( ) =
→
u
df 2
H2
H .u
d 2u
μ .m 2
+u =
df 2
H2
ρ
ρ
⎛ H ⎞
1
r
⎟.
. →
F (r ) = −⎜⎜
2 ⎟
2
⎝ m.r ⎠ a. 1 − e r
ρ
ρ
− κ .m r
F (r ) = 2 .
r
r
2
(
)
onde,
μ = G.M
(1.39)
A solução da equação (1.38) é
dada por:
(1.34)
1 μ.m 2
=
+ D. cos( f − f 0 ) =
r
H2
(1.40)
(
1 + e. cos f )
=
p
u=
onde,
κ=
H2
1
. 2
2
m a .(1 − e 2 )
(1.35)
A segunda Lei de Kepler já
havia sido obtida a partir das leis do
campo central, ou seja,
dA
H
= cte =
= (Área
dt
2.m
π .a.b
elipse)/Período =
T
onde
H2
μ.m 2
2. p.E
e2 = 1 +
p=
da
μ
(1.36)
(
)
H2
π 2 .a 2 .b 2 π 2 .a 4 . 1 − e 2
⎛ dA ⎞
=
=
⎜ ⎟ =
T2
T2
4.m 2
⎝ dt ⎠
,utilizando a equação (1.35), temos:
κ=
(1.41)
(1.42)
E = energia total do corpo
A equação (1.40) é uma
equação de cônica, isto é, se a lei de
força central é de uma força
inversamente
proporcional
a
distância (como a lei gravitacional),
a trajetória da partícula é uma
cônica, como no caso do sistema
Terra-Sol.
A terceira Lei de Kepler é de
fato apenas uma decorrência da
segunda. Quadrando a taxa areolar
têm-se:
2
(1.38)
4.π 2 .a 3
a3
= cte
=
cte
→
T2
T2
2.6.7 Curvas de Energia Potencial
Gravitacional
55
Curso de Dinâmica Orbital e Controle:
Fundamentos da Mecânica Celeste
Antonio Delson de Jesus
com energia potencial fictícia, dada
por:
(1.44)
U ef ( r ) = U ( r ) + U c ( r )
Sem resolver a equação de
movimento no campo gravitacional,
obtida em 2.6.6, podemos ver que é
possível
classificar
as
órbitas
resultantes somente por meio de
uma análise de equações de
movimento e de leis de conservação.
Utilizamos um recurso alternativo
que é o estudo das curvas de
energia potencial para esse fim. Para
tanto, um problema unidimensional
equivalente ao problema original
será considerado.
Primeiramente, a energia
total de uma partícula em um
campo central é dada por:
A energia U ef (r ) é chamada
de
A
parte
1 ⎛ dr ⎞
.m.⎜ ⎟ da energia total é radial.
2 ⎝ dt ⎠
Além disso, a força fictícia associada
é dada por:
Fef =
∂U ef
∂r
= F (r ) −
⎛−H2
∂U c
= F (r ) − ⎜⎜
3
∂r
⎝ m.r
, ou seja,
⎛ H2 ⎞
⎟
Fef = F (r ) + ⎜⎜
3 ⎟
⎝ m.r ⎠
1
.m.v 2 + U (r ) →
2
2
2
⎤
1 ⎡⎛ dr ⎞
2 ⎛ df ⎞
.m.⎢⎜ ⎟ + r .⎜ ⎟ ⎥ + U (r )
2 ⎢⎣⎝ dt ⎠
⎝ dt ⎠ ⎥⎦
(1.45)
O segundo termo da força
efetiva em (1.45) é o que chamamos
de força centrífuga.
Assim, neste problema a lei
de conservação de energia pode ser
escrita como sendo:
(1.43)
Mas, elevando a equação
(1.25) ao quadrado e substituindo
na equação de E, (1.43), temos,
E = U ef +
2
H2 ⎤
1 ⎡⎛ dr ⎞
E = .m.⎢⎜ ⎟ + 2 2 ⎥ + U (r) =
2 ⎣⎢⎝ dt ⎠ m .r ⎦⎥
1
⎛ dr ⎞
.m .⎜
⎟
2
⎝ dt ⎠
2
(1.46)
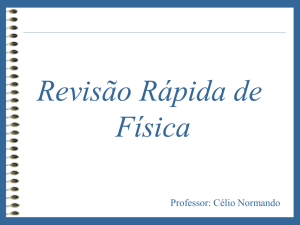
Para ilustrar este modo de
estudar o movimento, considere um
gráfico (Figura 9) de U ef em função
2
1 ⎛ dr ⎞ 1 H 2
.m.⎜ ⎟ +
+ U (r)
2 ⎝ dt ⎠ 2 m.r 2
de r no caso da força gravitacional,
−μ
. A energia potencial para
r2
−μ
esta força é dada por U ( r ) =
eo
r
(1.43)
O termo grifado é um termo
relacionado com a energia potencial.
Neste termo temos U(r), que é a
energia potencial da partícula e, o
1 H2
.
= Uc
2 m.r 2
efetiva.
2
E=
termo
energia
é
o
F (r ) =
potencial fictício correspondente é
dado por:
que
U ef =
chamamos de energia centrífuga. A
equação (1.43) pode ser considerada
para um problema unidimensional
(dependendo apenas de r) fictício
56
−μ 1 H2
+ .
r
2 m.r 2
(1.47)
⎞
⎟⎟
⎠
CADERNO DE FÍSICA DA UEFS, 03 (01): 47-59, 2004
Fig. 9 – Relações de energias no problema de
forças centrais
Fig.10 – Trajetória elíptica
Consideremos uma energia
potencial U(r) que corresponde a
uma força atrativa para qualquer
distância r, isto é, F = - ∂U/∂r , onde
F(r) é negativa e U(r) é uma função
crescente, conforme indica a curva
(a). A energia potencial centrífuga
Uc(r) está indicada pela curva (b). O
termo devido a Uc(r) é pequeno para
distâncias grandes, mas cresce
rapidamente quando a partícula se
aproxima da origem. Em muitas
situações reais, a energia potencial é
o termo dominante para pequenas
distâncias,
disto
resulta
uma
energia efetiva Uef com a forma
indicada pela curva (c).
O
termo
“fictício”
está
relacionado a termos adicionais que
apareceram nas equações originais
por causa da transformação da
solução
de
um
problema
bidimensional em outro equivalente
unidimensional.
Na Figura 9, quando a
energia total por unidade de massa
E da partícula for indicada pela reta
horizontal E2, o raio da órbita oscila
entre os valores mínimo e máximo, r
mínimo
e
r
máximo
respectivamente, e órbita tem forma
de uma roseta em geral, como indica
a Figura 10.
Portanto, quando o domínio
de variação de r está entre r mínimo
e r máximo o movimento da
partícula é finito, e a trajetória
permanece no interior do anel
limitado pelos círculos definidos por
r = r mínimo e r = r máximo. Porém,
isto não significa obrigatoriamente
que a órbita seja fechada. Durante o
tempo que r leva para ir do r
máximo para o r mínimo e
novamente ao r máximo, o raio vetor
desloca-se de um ângulo Δφ . Para
que a órbita seja fechada, é condição
suficiente e necessária que o ângulo
seja uma fração racional de 2.π, isto
é, Δφ = 2.π.m/n, onde m e n são
números inteiros . Então, após n
períodos, o raio vetor do ponto
avança m voltas inteiros e retorna
ao ponto inicial e a trajetória é
fechada.
No caso limite, quando a
energia E corresponde ao ponto de
mínimo D de U ef (r ) indicado pela
reta E4 , a partícula descreve uma
órbita circular de raio r0. Quando a
energia E for positiva ou nula, como
no caso das retas E2 e E0, a órbita
será ilimitada e aberta, a partícula
possui energia suficiente para
desaparecer
no
infinito.
Claramente, podemos ver que a
57
Curso de Dinâmica Orbital e Controle:
Fundamentos da Mecânica Celeste
Antonio Delson de Jesus
partícula não pode ter raio inferior
ao raio mínimo (G), porque neste
caso teríamos U ef > E 2 , o que
Antônio Delson C. de Jesus - Doutor
em Dinâmica Orbital e Controle pelo
Instituto Nacional de Pesquisas
Espaciais, professor Adjunto no
Departamento de Física da UEFS.
significa energia cinética negativa. A
diferença entre órbitas limitadas e
ilimitadas depende do fato da
energia E ser negativa ou não,
respectivamente;
para
o
caso
gravitacional
isto
sempre
é
verdadeiro.
No caso gravitacional, temos:
e2 = 1 +
2. p.E
μ
, p sempre positivo e μ
sempre positivo →
Quando E > 0 ⇒ e > 1 e a
cônica será uma hipérbole
Quando E = 0 ⇒ e = 1 e a
cônica será uma parábola
Quando E < 0 ⇒ e < 1 e a
cônica será uma elipse
Quando E < 0 e e = 0 ⇒ a
cônica será um círculo
No
próximo
Capítulo,
estaremos continuando o curso de
Dinâmica
Orbital
e
Controle,
discutindo mais um tema entre os
propostos.
Além
disso,
apresentaremos alguns exercícios de
aplicação do primeiro Capítulo –
Fundamentos da Mecânica Celeste.
Referências
[1]
JESUS, A. D. C. Notas de Aula.
Mecânica Orbital e Controle, SBPC,
Salvador, Julho, 2001.
[2]
De LUCA, N. Mecânica Celeste.
Editora da Universidade Federal do
Paraná, Curitiba, 1982.
[3]
ROY, A.E. Orbital Motion. 2nd ed.
Adam Hilger Ltd. Inglaterra, 1982.
[4]
SYMON, K. R. Mecânica, 3rd ed.
Reading, Mass.: Addison-Wesley,
1971.
Sobre o Autor –
58