ii
UNIVERSIDADE FEDERAL DO PARÁ
INSTITUTO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Rafael Rorato Londero
Avaliação do Impacto da Integração de Aerogeradores
na Estabilidade de Tensão de Longo-Prazo em Sistemas
Elétricos de Potência
TD 106 / 2014
UFPA / ITEC / PPGEE
Campus Universitário do Guamá
Belém-Pará-Brasil
2014
iii
UNIVERSIDADE FEDERAL DO PARÁ
INSTITUTO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Rafael Rorato Londero
Avaliação do Impacto da Integração de Aerogeradores na Estabilidade de
Tensão de Longo-Prazo em Sistemas Elétricos de Potência
Tese
submetida
à
Banca
Examinadora do Programa de
Pós-Graduação em Engenharia
Elétrica da UFPA para a
obtenção do Grau de Doutor em
Engenharia Elétrica na área de
Sistemas de Energia.
UFPA / ITEC / PPGEE
Campus Universitário do Guamá
Belém – Pará – Brasil
2014
iv
UNIVERSIDADE FEDERAL DO PARÁ
INSTITUTO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
AVALIAÇÃO DO IMPACTO DA INTEGRAÇÃO DE AEROGERADORES NA
ESTABILIDADE DE TENSÃO DE LONGO-PRAZO EM SISTEMAS ELÉTRICOS
DE POTÊNCIA
AUTOR: RAFAEL RORATO LONDERO
TESE DE DOUTORADO SUBMETIDA À AVALIAÇÃO DA BANCA
EXAMINADORA PELO COLEGIADO DO PROGRAMA DE PÓS-GRADUAÇÃO
EM ENGENHARIA ELÉTRICA DA UNIVERSIDADE FEDERAL DO PARÁ E
JULGADA ADEQUADA PARA OBTENÇÃO DO GRAU DE DOUTOR EM
ENGENHARIA ELÉTRICA NA ÁREA DE SISTEMAS DE ENERGIA ELÉTRICA.
BANCA EXAMINADORA:
Profa. Dra. Carolina de Mattos Affonso
(ORIENTADOR – UFPA)
Prof. Dr. João Paulo Abreu Vieira
(CO-ORIENTADOR – UFPA)
Prof. Ph.D. Glauco Nery Taranto
(MEMBRO – UFRJ)
Prof. Dr. Selênio Rocha Silva
(MEMBRO – UFMG)
Prof. Dr. Marcus Vinicius Alves Nunes
(MEMBRO – UFPA)
Prof. Dr. Ubiratan Holanda Bezerra
(MEMBRO – UFPA)
VISTO:
Prof. Dr. Evaldo Gonçalves Pelaes
(COORDENADOR DO PPGEE/ITEC/UFPA)
v
DEDICATÓRIA
Dedico este trabalho aos meus
familiares e amigos que contribuíram
direta ou indiretamente para a
realização do mesmo.
vi
AGRADECIMENTOS
Em primeiro lugar agradeço a meus pais Raul José Londero e Leda Inês Rorato
Londero, por todo o apoio durante a minha vida. Agradeço pela formação moral que
me foi dada e pela oportunidade de ter uma formação profissional, pois sem o incentivo
deles nada teria sido possível.
Agradeço a Professora Carolina Mattos, pela orientação que me foi dada para
realização desta tese, e ao Professor João Paulo pelas inúmeras discussões produtivas
sobre o assunto.
Agradeço aos companheiros do GSEI pela ajuda e sugestões na pesquisa e ao
ambiente de trabalho que fora oferecido.
Agradeço ao CNPq pelo incentivo financeiro.
vii
SUMÁRIO
1. INTRODUÇÃO..........................................................................................
1
1.1 A Energia Eólica no Brasil e no Mundo.................................................
1
1.2 Motivação...............................................................................................
6
1.3 Objetivos.................................................................................................
9
1.4 Revisão Bibliográfica.............................................................................
11
1.5 Estrutura da Tese....................................................................................
18
1.6 Trabalhos Publicados..............................................................................
20
2. SISTEMAS EÓLICOS...............................................................................
21
2.1 Introdução...............................................................................................
21
2.2 Sistemas Eólicos a Velocidade Constante..............................................
22
2.3 Sistemas Eólicos a Velocidade Variável................................................
23
2.4 Principais Componentes de um Sistema Eólico.....................................
24
2.5 Turbina Eólica........................................................................................
25
2.5.1 Controle de Posição das Pás da Turbina Eólica.........................
31
2.6 Caixa de Engrenagens............................................................................
33
2.7 Gerador...................................................................................................
34
2.7.1 Gerador de Indução em Gaiola....................................................
36
2.7.2 Gerador de Indução Duplamente Excitado..................................
37
2.7.3 Gerador Síncrono com Conversor de Capacidade Nominal........
39
2.8 Conclusões..............................................................................................
40
3. ESTABILIDADE DE TENSÃO................................................................
42
3.1 Introdução...............................................................................................
42
3.2 Conceitos de Estabilidade de Tensão e Segurança de Tensão................
43
3.3 Classificação da Estabilidade de Tensão................................................
48
3.4 Mecanismo da Instabilidade de Tensão.................................................
50
3.5 Curva PV................................................................................................
52
3.6 Análise Estática e Dinâmica...................................................................
63
3.7 Conclusões..............................................................................................
63
viii
4. GERADOR DE INDUÇÃO DUPLAMENTE EXCITADO..................
65
4.1 Introdução..............................................................................................
65
4.2 Modelo do DFIG para Estudos em Regime Permanente.......................
66
4.3 Considerações na Modelagem para Estudos de Estabilidade................
67
4.4 Representação do Gerador de Indução..................................................
69
4.5 Representação da Turbina Eólica e Controle de Passo.........................
74
4.6 Representação do Sistema Mecânico....................................................
79
4.7 Representação dos Conversores e do Link CC.....................................
82
4.8 Estratégia de Controle para o GSC.......................................................
87
4.9 Estratégia de Controle para o RSC........................................................
93
4.10 Cálculo dos Limites dos Conversores e Curva de Capacidade...........
97
4.10.1 Limite da Corrente do Rotor.....................................................
99
4.10.2 Limite da Corrente do Estator..................................................
101
4.10.3 Limite da Tensão do Rotor........................................................
102
4.10.4 Definição dos Limites de Potência Reativa do DFIG...............
104
4.10.5 Potências Ativa e Reativa Totais fornecida pelo DFIG............
105
4.11 Cálculo dos Limites das Malhas de Controle do RSC........................
112
4.11.1 Malha de Controle de Potência Ativa.......................................
113
4.11.2 Malha de Controle de Potência Reativa...................................
114
4.11.3 Avaliação dos Termos
.............
114
4.12 Conclusões...........................................................................................
115
5. GERADOR SÍNCRONO COM CONVERSOR DE CAPACIDADE
NOMINAL..................................................................................................
117
5.1 Introdução..............................................................................................
117
5.2 Modelo do Gerador Síncrono com Rotor Bobinado..............................
118
5.3 Malha de Controle da Tensão do Capacitor...........................................
119
5.4 Malha de Controle do Inversor..............................................................
123
5.5 Curva de Capacidade do FRC................................................................
128
5.6 Conclusões.............................................................................................
131
6. RESULTADOS...........................................................................................
132
6.1 Introdução...............................................................................................
132
ix
6.2 Sistema Teste..........................................................................................
133
6.3 Impactos Causados pela Integração de Aerogeradores SCIG e DFIG....
134
6.3.1 Abertura de uma Linha de Transmissão no Trecho 6-7.................
135
6.3.2 Aumento de Carga de 20%.............................................................
137
6.4 Impacto dos Diferentes Modos de Controle do DFIG............................
139
6.4.1 Cenário 1: Carga Estática..............................................................
140
6.4.2 Cenário 2: Carga Estática e Dinâmica .........................................
143
6.5 Contribuição de Aerogeradores a Velocidade Variável para Suporte de
145
Potência Reativa.......................................................................................
6.6 Contribuição do GSC para a Estabilidade de Tensão de Longo-Prazo...
150
6.6.1 Impacto do Nível de Penetração Eólica..........................................
151
6.6.2 Nível de Penetração Intermediário (15,3%)...................................
153
6.7 Conclusões..............................................................................................
157
7. CONCLUSÕES FINAIS E TRABALHOS FUTUROS..........................
159
7.1 Considerações Finais..............................................................................
159
7.2 Integração de Aerogeradores SCIG e DFIG...........................................
159
7.3 Modos de Controle: Fator de Potência ou Tensão Terminal..................
160
7.4 Contribuição de Aerogeradores para o Suporte de Potência Reativa......
160
7.5 Contribuição do GSC para a Estabilidade de Tensão de Longo-Prazo...
161
7.6 Conclusões Finais...................................................................................
161
7.7 Trabalhos Futuros...................................................................................
166
REFERÊNCIAS BIBLIOGRÁFICAS.................................................................
167
ANEXO – DADOS DO SISTEMA TESTE.........................................................
177
x
LISTA DE FIGURAS
Figura 1.1: Crescimento da capacidade total instalada em energia eólica pelo
2
mundo..........................................................................................................................
Figura 1.2: Evolução da capacidade eólica total instalada no Brasil.........................
4
Figura 1.3: Matriz Elétrica Brasileira 2013................................................................
5
Figura 1.4: Complementaridade das fontes hídrica-eólica na região nordeste.........
6
Figura 2.1: Estrutura de um aerogerador de eixo horizontal......................................
24
Figura 2.2: Representação aerodinâmica de uma turbina eólica................................
27
Figura 2.3: Elemento de seção da pá na posição .....................................................
28
Figura 2.4: Forças atuantes em um elemento de seção da pá.....................................
29
Figura 2.5: Evolução da potência das turbinas eólicas com o aumento do diâmetro
31
Figura 2.6: Controle Estol: o aumento do ângulo de ataque
32
proporciona um
maior descolamento do escoamento sobre a pá...........................................................
Figura 2.7: Curva de potência para aerogeradores com potência de 850 kW............
33
Figura 2.8: Divisão do mercado eólico entre os maiores fabricantes em 2012..........
35
Figura 2.9: Gerador de indução em gaiola conectado diretamente a rede elétrica.....
36
Figura 2.10: Gerador de indução duplamente excitado ligado a rede elétrica...........
37
Figura 2.11: Gerador síncrono com conversor de capacidade nominal ligado a rede
40
elétrica..........................................................................................................................
Figura 3.1: Classificação da estabilidade de tensão...................................................
48
Figura 3.2: Sistema de potência elementar.................................................................
53
Figura 3.3: Curva PV e definição da margem de estabilidade de tensão MET.........
55
Figura 3.4: Definição da Capacidade de Transmissão Disponível CTD....................
58
Figura 3.5: Evolução do máximo carregamento para diferentes cargas (
)..........
60
Figura 3.6: Aumento da demanda da carga para carga do tipo potência constante...
62
Figura 3.7: Limite de Estabilidade.............................................................................
62
Figura 4.1: Janela de tempo dos fenômenos de estabilidade nos sistemas de
68
potência........................................................................................................................
Figura 4.2: Modelo dinâmico de ordem reduzida do DFIG.......................................
73
Figura 4.3: Curvas
76
...................................................................................
..............
76
Figura 4.5: Malha de controle de passo da turbina eólica..........................................
77
Figura 4.4: Potência mecânica para várias velocidades de ventos e
xi
Figura 4.6: Sistema de controle do DFIG...................................................................
78
Figura 4.7: Sistema mecânico representado por duas massas....................................
80
Figura 4.8: Diagrama de blocos para o modelo duas massas do eixo mecânico........
80
Figura 4.9: Conversores e link CC............................................................................
82
Figura 4.10: Cálculo de
para estratégia de controle do GSC................................
85
Figura 4.11: Malhas de controle para o GSC.............................................................
91
Figura 4.12: Estratégia de controle do RSC..............................................................
93
Figura 4.13: Malhas de controle de potência ativa e reativa para o DFIG.................
96
Figura 4.14: Quadripolo representativo do gerador de indução.................................
97
Figura 4.15: Curva de capacidade do DFIG considerando apenas o RSC (terminal
110
igual a 1 p.u.)...............................................................................................................
do DFIG............................................
111
Figura 4.17: Curva de capacidade para diferentes valores de tensão terminal..........
112
Figura 4.18: Curva de capacidade completa para tensão terminal igual a 1 p.u.......
112
Figura 5.1: Diagrama de blocos do gerador síncrono de polos salientes...................
119
Figura 4.16: Curva de referência
Figura 5.2: Chopper tipo boost................................................................................... 120
Figura 5.3: Diagrama de blocos da malha de controle do chopper............................
122
Figura 5.4: Representação do inversor de tensão.......................................................
123
Figura 5.5: Estratégia de controle para o inversor...................................................... 124
Figura 5.6: Malhas de controle do inversor................................................................ 126
Figura 5.7: Limitação de corrente do inversor...........................................................
127
Figura 5.8: Sistema de controle do FRC....................................................................
128
Figura 5.9: Curva de capacidade do DFIG e FRC para tensão terminal igual 1 p.u.
130
Figura 5.10: Curvas de capacidade considerando a capacidade do inversor do FRC 131
igual a 1 MVA.............................................................................................................
Figura 6.1: Diagrama unifilar do sistema teste........................................................... 133
Figura 6.2: Regime de ventos.....................................................................................
133
Figura 6.3: Comportamento das variáveis do gerador G3.......................................... 135
Figura 6.4: Tensões nas barras de carga.....................................................................
136
Figura 6.5: Potência reativa fornecida/consumida pela barra de geração eólica........ 136
Figura 6.6: Tensões nas barras de carga.....................................................................
137
Figura 6.7: Efeito da comutação dos taps do OLTC..................................................
138
Figura 6.8: Curvas PV................................................................................................
139
xii
Figura 6.9: Tensão na barra 11.................................................................................
141
Figura 6.10: Tensão na barra 8...................................................................................
141
Figura 6.11: Corrente de campo de G3......................................................................
141
Figura 6.12: Posição do tap........................................................................................
142
Figura 6.13: Potência reativa fornecida pelo DFIG...................................................
142
Figura 6.14: Curva PV da barra 8............................................................................... 143
Figura 6.15: Tensão na barra 11.................................................................................
143
Figura 6.16: Tensão na barra 8...................................................................................
143
Figura 6.17: Corrente de campo do gerador G3........................................................
144
Figura 6.18: Posição do tap........................................................................................
144
Figura 6.19: Potência reativa absorvida pelos motores..............................................
145
Figura 6.20: Curva PV da barra 8............................................................................... 145
Figura 6.21: Sistema teste modificado com parque eólico transferido para a barra 2 146
Figura 6.22: Regimes de vento com velocidades altas e baixas................................. 146
Figura 6.23: Tensão na barra 8 durante condições de altas velocidades....................
147
Figura 6.24: Tensão na barra 8 durante condições de baixas velocidades.................
147
Figura 6.25: Potência reativa injetada pelo DFIG durante condições de altas
148
velocidades...................................................................................................................
148
Figura 6.26: Potência reativa injetada pelo DFIG durante condições de baixas
velocidades...................................................................................................................
149
Figura 6.27: Potência reativa injetada pelo FRC durante condições de baixas
velocidades...................................................................................................................
149
Figura 6.28: Potência reativa injetada na barra 2 durante condições de baixas
velocidades...................................................................................................................
Figura 6.29: Curva PV da barra 8 durante condições de baixas velocidades............. 149
Figura 6.30: Limite de potência reativa para todos os níveis de penetração..............
152
Figura 6.31: Tensão na barra 8 para todos os níveis de penetração...........................
152
Figura 6.32: Limite de potência reativa para todas tecnologias com
...
153
Figura 6.33: Tensão na barra 8...................................................................................
154
Figura 6.34: Evolução do tap...................................................................................... 154
Figura 6.35: Corrente de campo do gerador G3.........................................................
155
Figura 6.36: Potência reativa injetada pelo DFIG(RSC) e FRC e os seus limites de 155
potência reativa............................................................................................................
xiii
Figura 6.37: Potência ativa produzida pelos aerogeradores.......................................
155
Figura 6.38: Ângulo de passo.....................................................................................
155
Figura 6.39: Coeficiente de potência.......................................................................... 156
Figura 6.40: Potência reativa injetada pelo DFIG(RSC+GSC).................................. 156
Figura 6.41: Potência reativa absorvida pelos motores de indução............................ 156
Figura 6.42: Curva PV da barra 8............................................................................... 156
Figura 6.43: Carregamento do sistema.......................................................................
157
xiv
LISTA DE TABELAS
Tabela 1.1: Os 10 países com maior capacidade eólica instalada no mundo............
3
Tabela 1.2: Os 10 países com maior capacidade eólica adicionada em 2013...........
3
Tabela 2.1: Os maiores fabricantes de aerogeradores no mundo em 2012...............
35
Tabela 3.1: Característica e sensibilidade da carga...................................................
55
Tabela 6.1: Cenários de geração................................................................................
134
Tabela 6.2: Cenários de geração e controle do DFIG...............................................
140
Tabela 6.3: Níveis de penetração eólica....................................................................
151
xv
LISTA DE ABREVIATURAS
BEM
Blade Element Momentum (Momento do Elemento das Pás)
CA
Corrente Alternada
CC
Corrente Contínua
CET
Compromissos Existentes da Transmissão
CTD
Capacidade de Transferência Disponível
DFIG
Doubly Fed Induction Generator (Gerador de Indução Duplamente Excitado)
EE
Electrically Excited (Eletricamente Excitado)
FACTS
Flexible AC Transmission Systems (Sistemas de Transmissão CA Flexíveis)
FRC
Full Rated Converter (Conversor de Capacidade Nominal)
GFC
Gear and Full Converter (Caixa de Engrenagens e Conversor Nominal)
GSC
Grid-Side Converter (Conversor do Lado da Rede)
HVDC
High Voltage Direct Current (Transmissão CC em Alta Tensão)
IG
Induction Generator (Gerador de Indução)
IGBT
Insulated Gate Bipolar Transitor (Transistor Bipolar de Porta Isolada)
MBC
Margem de Benefício de Capacidade
MCT
Margem de Confiabilidade da Transmissão
MET
Margem de Estabilidade de Tensão
OEL
Over-Excitation Limiter (Limitador de Sobre-excitação)
OLTC
On-Load Tap Changer (Comutador de Tap sob Carga)
ONS
Operador Nacional do Sistema Elétrico
xvi
PCH
Pequenas Centrais Hidrelétricas
PDE
Plano Decenal de Energia
P+I
Ações de controle Proporcional e Integral
PM
Permanent Magnets (Imã Permamente)
PMU
Phasor Measurement Unit (Unidade de Medição Fasorial)
PROINFA
Programa de Incentivo as Fontes Alternativas
PWM
Pulse Width Modulation (Modulação por Largura de Pulso)
RSC
Rotor-Side Converter (Conversor do Lado do Rotor)
SCIG
Squirrel Cage Induction Generator (Gerador de Indução em Gaiola)
SEE
Sistemas de Energia Elétrica
SHEM
Selective Harmonic Elimination Modulation (Eliminação Harmônica Seletiva)
SIL
Surge Impedance Loading (Impedância de Surto)
SIN
Sistema Interligado Nacional
SVC
Static Var Compensator (Compensador Estático de Reativo)
STATCOM Static Compensator (Compensador Estático)
TSR
Tip Speed Ratio (velocidade específica de ponta de pá)
UEL
Under-Excitation Limiter (Limitador de Sub-excitação)
UHE
Usina Hidrelétrica
xvii
LISTA DE SÍMBOLOS
sensibilidades (carga estática)
ângulo de ataque e ângulo de passo (turbina eólica) [graus]
ângulo de torção [radianos]
erro de velocidade, erro de potência e erro de tensão [p.u.]
ângulo de carga [radianos]
ângulo de fase da tensão terminal em relação ao eixo
[graus]
velocidade específica de ponta de pá
velocidade específica ótima de ponta de pá
fluxo magnético do estator no eixo
[p.u.]
fluxo magnético do rotor no eixo
[p.u.]
densidade do ar [kg/m3]
ângulo do fator de potência da carga [graus]
fase interna do conversor k no eixo
fase do conversor k no eixo
[graus]
[graus]
velocidade angular do sistema de potência [rad/s]
velocidade mecânica da turbina [rad/s]
velocidade síncrona [p.u.]
área coberta pelas pás do rotor da turbina eólica [m 2]
relação de transformação do transformador
xviii
relação de transformação dos transformadores T1 e T2 do FRC
número de pás do rotor da turbina eólica
[B]
C
matriz susceptância [p.u.]
capacitância do capacitor do link CC [p.u.]
coeficiente de potência
coeficiente de arrasto e sustentação
comprimento de corda [m]
D
coeficiente de amortecimento [p.u.]
energia armazenada no capacitor [p.u.]
tensão subtransitória do gerador síncrono do FRC [p.u.]
tensão interna do conversor k no eixo
tensão interna do inversor no eixo
[p.u.]
[p.u.]
tensão transitória interna do DFIG no eixo
[p.u.]
frequência de ressonância do eixo mecânico [Hz]
força resultante, sustentação, arrasto, axial e tangencial [N]
[G]
matriz condutância
constante de inércia equivalente, turbina e gerador [s]
corrente no capacitor, indutor, diodo e inversor [p.u.]
corrente de armadura do gerador síncrono do FRC [p.u.]
corrente do inversor no eixo
[p.u.]
xix
corrente do conversor k no eixo
[p.u.]
corrente do conversor k no eixo
corrente do estator no eixo
corrente do rotor no eixo
[p.u.]
[p.u.]
[p.u.]
constante de tensão do conversor k
constante de corrente do conversor k
fator de forma para modulação PWM do conversor k
rigidez do eixo mecânico [p.u./rad.elet.]
indutância do indutor do chopper boost do FRC [p.u.]
auto-indutância do estator e rotor [p.u.]
indutância do estator, rotor e magnetização [p.u.]
índice de modulação do conversor k
índice de modulação do chopper
índice de modulação do inversor
número de conversores conectados em pontes trifásicas do
conversor k
potência ativa do estator, rotor, conversor k e total [p.u.]
potência ativa solicitada pela carga e potência ativa inicial
potência ativa dissipada pelo DFIG em função da corrente do rotor
e da tensão do rotor [p.u.]
máximo carregamento [Watts]
xx
potência contida na massa ventos [Watts]
potência mecânica extraída pela turbina [Watts]
potência reativa do estator, rotor, conversor k e total [p.u.]
potência reativa solicitada pela carga e potência reativa inicial
potência reativa drenada pelo DFIG em função da corrente do
rotor e da tensão do rotor [p.u.]
raio do rotor (turbina eólica) [m]
resistência de comutação [p.u.]
resistor de dissipação [p.u.]
distância do cubo do rotor até o elemento
[m]
potência aparente do estator, rotor, conversor e total [p.u.]
potência aparente em função da corrente do rotor, corrente do
estator e tensão do rotor [p.u.]
escorregamento [p.u.]
constante de tempo de circuito aberto do DFIG [s]
torque eletromagnético (carga), mecânico (turbina) e torção [p.u.]
torque axial e tangencial [N.m]
velocidade relativa do vento e suas componentes (tangencial e
axial) [m/s]
tensão inicial para o ponto de operação
tensão de saída do retificador e tensão no inversor [p.u.]
tensão crítica no ponto de máximo carregamento [p.u.]
xxi
tensão de saída a vazio do retificador [p.u.]
tensão terminal no eixo
[p.u.]
tensão do estator no eixo
[p.u.]
tensão do rotor no eixo
[p.u.]
amplitudes do sinal modulante e portadora triangular do sinal
PWM
tensão no capacitor do link CC [p.u.]
reatância de circuito aberto e reatância transitória do DFIG [p.u.]
reatância subtransitória de eixo direto do gerador síncrono do FRC
[p.u.]
[Y]
matriz admitância
impedância (resistência, reatância) do estator [p.u.]
impedância (resistência, reatância) do rotor [p.u.]
impedância do núcleo (reatância) [p.u.]
impedância
(resistência,
reatância)
do
transformador
acoplamento [p.u.]
reatância dos transformadores T1 e T2 do FRC [p.u.]
[Z]
z
matriz impedância
demanda solicitada pela carga
taxa de variação de potência
taxa de variação do ângulo de passo
de
xxii
Subscritos
eixo do controle (direto e quadratura)
quantidades referentes ao estator, rotor e magnetização
máximo e mínimo
eixo de referência do sistema de potência (real e imaginário)
b
valor base
c
quantidades referentes ao inversor do FRC
CA,CC
quantidades do sistema CA e CC
conversor 1 e 2 para o DFIG (GSC e RSC)
valor de referência
xxiii
RESUMO
Esta tese analisa os impactos causados na estabilidade de tensão de longo-prazo em
sistemas elétricos de potência, por meio da integração de aerogeradores a velocidade
constante: gerador de indução em gaiola SCIG (Squirrel Cage Induction Generator); e
aerogeradores a velocidade variável: gerador de indução duplamente alimentado DFIG
(Doubly Fed Induction Generator) e gerador síncrono eletricamente excitado com
conversor de capacidade nominal FRC (Full Rated Converter). Aerogeradores a
velocidade variável são capazes de fornecer potência reativa graças aos conversores de
eletrônica de potência, os quais estão sujeitos a limitações de tensão e corrente, e
dependem das condições de operação do sistema e do regime de ventos. Assim como os
geradores síncronos convencionais, os aerogeradores a velocidade variável são descritos
por curvas de capacidade que definem os limites de injeção/absorção de potência reativa
como função da tensão terminal e da potência ativa injetada. Equipamentos como
transformador com comutador de tap sob carga OLTC (On-Load Tap Changer), o
limitador de sobre-excitação OEL (Over-Excitation Limiter) dos geradores síncronos,
cargas estáticas e dinâmicas (motor de indução) são levados em consideração nas
análises, pois afetam significativamente a estabilidade de tensão de longo-prazo. A
contribuição dos aerogeradores a velocidade variável é analisada considerando os
modos de controle (fator de potência ou tensão terminal), regimes de velocidades dos
ventos (altas e baixas) e a importância do suporte de potência reativa do DFIG pelo
conversor do lado da rede GSC (Grid-Side Converter) para prevenção do colapso de
tensão.
Palavras-chaves: Aerogerador a Velocidade Constante, Aerogerador a Velocidade
Variável, Curvas de Capacidade, Conversor do lado da rede, Estabilidade de Tensão de
Longo-Prazo.
xxiv
ABSTRACT
This thesis analyzes the impacts on long-term voltage stability at electric power
systems, through integration of fixed-speed wind generator: squirrel cage induction
generator SCIG; and variable-speed wind generators: doubly fed induction generator
DFIG and electrically excited synchronous generator with full rated converter FRC.
Variable-speed wind generators are capable of providing reactive power due to the
power electronic converters, which are subject to limitations of voltage and current, and
depend on power system operating conditions and wind speed regime. As well
conventional synchronous generators, variable-speed wind generators are described by
capability curves that define the limits of injection/absorption of reactive power as a
function of terminal voltage and active power injected. Equipment such as on-load tap
changer transformer OLTC, over-excitation limiter OEL of synchronous generators,
static and dynamic loads (induction motors) are taken into account in the analyzes,
therefore significantly affect the long-term voltage stability. The contribution of the
variable-speed wind generators are analyzed considering the control modes (power
factor and terminal voltage), the wind speeds regimes (high and low) and the
importance of reactive power support from DFIG by grid-side converter GSC to prevent
the voltage collapse.
Keywords: Fixed-Speed Wind Generator, Variable-Speed Wind Generator, Capability
Curve, Grid-Side Converter, Long-Term Voltage Stability.
1
Capítulo 1
Introdução
1.1
A Energia Eólica no Brasil e no Mundo
O interesse pelas energias renováveis é uma tendência generalizada em vários países do
mundo, pelo fato de proporcionar redução dos impactos ambientais, diversificação da
matriz energética e independência dos combustíveis fósseis. As tecnologias aplicadas às
energias renováveis compreendem usinas térmicas baseadas em biomassa, células
combustíveis, usinas eólicas, usinas solares, pequenas centrais hidrelétricas (PCHs) e
etc. De todas as fontes renováveis, a energia eólica é a que mais cresce no mundo em
capacidade instalada [1]. A maior parte do potencial eólico mundial encontra-se no mar,
distante dos grandes centros de consumo, fazendo com que os parques eólicos sejam
conectados por longas linhas de transmissão, trazendo novos desafios para a operação
dos sistemas de energia elétrica (SEEs) do mundo todo [2].
As fontes renováveis ganharam importância, principalmente, devido aos
problemas ambientais ocasionados pela exploração de fontes de energia não-renováveis,
como os combustíveis fósseis que emitem grandes quantidades de gases causadores do
efeito estufa, fenômeno responsável pelo aquecimento global e mudanças climáticas.
Para conter o aumento da temperatura global foi criado o Protocolo de Quioto em 1997
no Japão, o qual visou à redução de gases de efeito estufa. O Protocolo de Quioto
expirou em 2012, porém, a Conferência do Clima de Doha, no Quatar, a chamada COP18 garantiu a sua continuidade de 2013 a 2020, com revisão de novas metas em 2014.
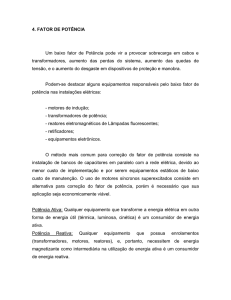
Em 2013, mais de 35 GW em capacidade eólica adicionada entrou em operação
nos SEEs de todo mundo, apresentando uma pequena queda em comparação a 2012,
quando a capacidade eólica global adicionada excedeu 45 GW. Em termos de
investimentos no setor eólico global, ocorreu uma pequena queda de US$ 80,9 bilhões
(2012) para US$ 80,3 bilhões (2013) [3]. A capacidade global estava em 318.105 MW
2
ao final de 2013, representando um crescimento acumulado de mercado maior do que
12,5%, conforme mostra a Figura 1.1.
Capacidade Total Instalada (MW)
350.000
318.105
282.272
300.000
237.227
250.000
199.739
200.000
159.766
150.000
120.923
93.927
100.000
50.000
39.295 47.693
59.024
74.122
0
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
Anos
Figura 1.1 Crescimento da capacidade total instalada em energia eólica pelo mundo [3].
A China assumiu a liderança no rank dos 10 países com maior capacidade
eólica instalada no mundo, representando o maior mercado eólico desde 2009 [3],
conforme mostra a Tabela 1.1. Incertezas políticas sobre as regras das taxas de
produção de crédito e a desaceleração da economia, forçaram os Estados Unidos a
reduzir sua capacidade eólica a ser adicionada [3], conforme mostra a Tabela 1.2. Ao
final do ano de 2013, 24 países estavam com mais 1.000 MW de capacidade instalada,
sendo: 16 na Europa, 4 na Ásia-Pacífico (China, Índia, Japão e Austrália), 3 na América
do Norte (Estados Unidos, Canadá e México) e 1 na América Latina (Brasil).
Pelo segundo ano consecutivo, o mercado latino-americano instalou mais de 1
GW de capacidade eólica. Em 2012, seis mercados regionais instalaram 1.225 MW
sobre um total de 3,5 GW de capacidade. Em 2013, apenas quatro mercados incluindo
Brasil, Chile, Argentina e Uruguai responderam por 1.163 MW sobre um total de 4,8
GW de capacidade eólica [3].
Ao final de 2013, o Brasil mais uma vez lidera na América Latina, com 953 MW
de capacidade adicionada, seguido por Chile (130 MW), Argentina (76 MW) e Uruguai
(4 MW). Embora, todos os projetos de geração eólica no Brasil estejam completamente
comissionados, alguns parques eólicos ainda não entraram em operação por atrasos em
obras de construção de linhas transmissão que os conectam ao sistema elétrico. O Brasil
3
é um grande mercado promissor em energia eólica onshore. O Brasil contratou 4,7 GW
de capacidade eólica em apenas três leilões em 2013, e aguarda acrescentar quase 7 GW
até o final de 2015 [3].
Tabela 1.1 Os 10 países com maior capacidade eólica instalada no mundo [3].
País
China
Estados Unidos
Alemanha
Espanha
Índia
Reino Unido
Itália
França
Canadá
Dinamarca
Resto do Mundo
Total top 10
Total
Capacidade Total no final de 2013 [MW]
91.412
61.091
34.250
22.959
20.150
10.531
8.552
8.254
7.803
4.772
48.332
269.773
318.105
%
28,7
19,2
10,8
7,2
6,3
3,3
2,7
2,6
2,5
1,5
15,2
84,8
100
Tabela 1.2 Os 10 países com maior capacidade eólica adicionada em 2013 [3].
País
China
Alemanha
Reino Unido
Índia
Canadá
Estados Unidos
Brasil
Polônia
Suécia
Romênia
Resto do Mundo
Total top 10
Total
Capacidade adicionada em 2013 [MW]
16.088
3.238
1.883
1.729
1.559
1.084
953
894
724
695
6.402
28.887
35.289
%
45,6
9,2
5,3
4,9
4,5
3,1
2,7
2,5
2,1
2
18,1
82
100
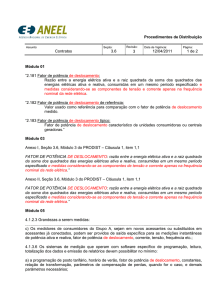
No fim de 2013, o Brasil tinha 3,5 GW de capacidade eólica instalada, o
suficiente para suprir 8 milhões de famílias, representando 3% do consumo nacional de
4
energia elétrica. Somente em 2013, 34 novos parques eólicos entraram em operação,
adicionando 953 MW ao Sistema Interligado Nacional (SIN). A indústria eólica e sua
cadeia de fornecedores estão se estabelecendo firmemente no Brasil e nove fabricantes
internacionais abriram instalações no país. O Plano Decenal de Energia do governo
brasileiro (PDE 2022) estabelece uma meta de 17 GW de capacidade eólica instalada a
ser alcançada até 2022, sendo responsável por 9,5% do consumo nacional de energia
elétrica [3]. A Figura 1.2 apresenta a evolução da capacidade total eólica instalada no
Brasil nos últimos anos.
Capacidade Total Instalada (MW)
4.000
3.461
3.500
3.000
2.508
2.500
2.000
1.431
1.500
927
1.000
606
500
29
237
247
341
2006
2007
2008
0
2005
2009
2010
2011
2012
2013
Anos
Figura 1.2 Evolução da capacidade eólica total instalada no Brasil [3].
Quase metade da nova capacidade eólica instalada em 2013 é proveniente de três
novos complexos de parques eólicos: 160 MW do complexo de Asa Branca composto
por cinco parques eólicos, 150 MW do complexo de Calango também distribuídos por
cinco parques eólicos e 120 MW do complexo de Renascença composta por quatro
parques eólicos. Estima-se que os leilões eólicos de 2013 criarão mais de 70.000 novos
empregos e trarão investimentos de US$ 8,8 bilhões para a indústria eólica [3].
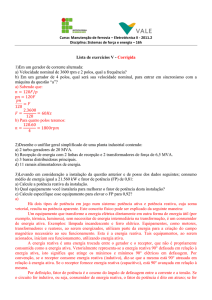
O PROINFA (Programa de Incentivo as Fontes Alternativas) conforme descrito
no Decreto nº 5.025, de 2004, foi instituído com o objetivo de aumentar a participação
da energia elétrica produzida por empreendimentos concebidos com base em fontes
eólicas, biomassa e PCH no SIN. O intuito foi promover a diversificação da matriz
energética brasileira, buscando alternativas para aumentar a segurança no abastecimento
de energia elétrica, além de permitir a valorização das características e potencialidades
5
regionais e locais. A Figura 1.3 apresenta um panorama atual da matriz elétrica
brasileira.
Outras
Térmicas 1,4
Nuclear 2
Carvão 3
Eólica 3,5
Derivados do
Petróleo 7,7
Biomassa 11,4
Hidrelétrica
85,9
Gás Natural
12,5
Capacidade Instalada (GW)
Figura 1.3 Matriz Elétrica Brasileira 2013 [3].
A fonte hidrelétrica é a principal responsável pelo fornecimento de energia
elétrica no Brasil e o nível dos reservatórios representa a quantidade de energia
hidrelétrica disponível para o SIN. Nesse contexto, a região nordeste do Brasil tem uma
característica interessante com relação à produção de energia eólica. A velocidade dos
ventos costuma ser menor nos períodos chuvosos e maior nos períodos de estiagem.
Essa característica favorece a complementaridade entre as fontes hídrica e eólica.
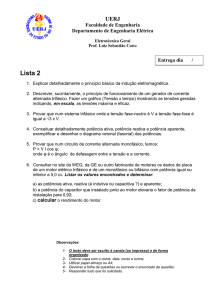
A Figura 1.4 apresenta o volume do reservatório da UHE Sobradinho e a
geração eólica da região nordeste durante o ano de 2012. Durante o 1º semestre o
volume dos reservatórios é alto, e a oferta de energia é grande, explicando porque as
tarifas do período úmido são menores do que as tarifas praticadas no período seco.
Porém, no 2º semestre quando o nível dos reservatórios está baixo a geração eólica é
alta, fazendo com que a tarifa do período seco tenda a diminuir, além de garantir uma
capacidade maior de armazenamento para os reservatórios.
Em 2012, por questões de segurança energética, foi necessário o despacho de
termelétricas em momentos que a geração não conseguiria atender a carga, atuando em
horários de ponta de carga, elevando o valor das tarifas e dos encargos aos
consumidores.
6
Em dezembro de 2012, a geração eólica poupou os consumidores brasileiros de
R$ 500 milhões a mais de encargos de segurança energética. Considerando o ano todo, a
fonte eólica evitou cerca R$ 1,6 bilhões e caso as usinas eólicas não existissem o valor
pago pelos encargos seria de R$ 3,4 bilhões [5]. A complementaridade da fonte eólica,
além de proporcionar economias nas tarifas e encargos, garante maior segurança e
confiabilidade ao sistema.
Já o ano de 2014 promete altos encargos a serem pagos pelo consumidor devido
à escassez das chuvas, reforçando a necessidade de expansão do parque eólico
brasileiro.
30
400
25
350
20
300
Período Úmido
Período Seco
15
250
10
200
5
1
2
3
4
5
6
7
8
Meses do Ano
9
10
11
12
Geração Eólica [MW]
Volume do Reservatório [km3]
Reservatório
Usina Eólica
150
Figura 1.4 Complementaridade das fontes hídrica-eólica na região nordeste [4].
1.2
Motivação
A busca por fontes de energia renovável visa à diversificação da matriz
energética mundial, consequentemente, promove a independência dos combustíveis
derivados do petróleo com a redução das tarifas de energia e ainda contribui ao meio
ambiente para a diminuição do aquecimento global. Nesse cenário mundial, o aumento
da penetração eólica pelos sistemas de potência do mundo todo levou muitos operadores
de sistemas a reformularem seus códigos de rede, com respeito à geração eólica.
Os primeiros aerogeradores de grande porte conectados aos sistemas de potência
operavam a velocidade constante, compostos tipicamente por geradores de indução do
tipo gaiola de esquilo SCIG (Squirrel Cage Induction Generator), os quais são
desprovidos de controle de potências ativa e reativa. Esse tipo de aerogerador ganhou
popularidade na indústria pela construção robusta e barata, porém devido às novas
7
tendências dos códigos de rede, que exigem rápida recuperação da tensão terminal e
fornecimento de potência reativa durante a ocorrência de faltas (em grande parte dos
países europeus), fez com que os aerogeradores a velocidade constante perdessem
mercado para os esquemas a velocidade variável, compostos por gerador de indução
duplamente excitado DFIG (Doubly Fed Induction Generator) e gerador síncrono com
imã permanente ou eletricamente excitado com conversor de capacidade nominal FRC
(Full Rated Converter), ambos controlados por conversores de eletrônica de potência.
Graças aos conversores, os aerogeradores a velocidade variável são capazes de fornecer
potência reativa e alcançar as metas exigidas pelo código de rede. Atualmente, a
tecnologia de aerogeradores a velocidade variável domina o mercado eólico de
fabricantes.
Com o aumento da demanda, os grandes parques eólicos são exigidos a fornecer
potência reativa para o sistema de potência quer seja em situações de contingências,
como também para aliviar o congestionamento do sistema de transmissão nos
momentos de ponta de carga, oferecendo flexibilidade operacional ao sistema de
potência. Em todos os casos, o fornecimento de potência reativa visa o aumento da
margem de estabilidade de tensão, em momentos que o sistema de potência encontra-se
altamente carregado. Pelo fato do conversor do FRC possuir maior capacidade em
relação aos conversores do DFIG, poderia se pensar que o FRC possui por consequência
maior capacidade de fornecer potência reativa ao sistema de potência [6,7]. Entretanto,
na literatura não existe nenhuma avaliação para a estabilidade de tensão de longo-prazo
considerando o fornecimento de potência reativa por parte do conversor do lado da rede
GSC (Grid-Side Converter) do DFIG.
Embora os esquemas a velocidade variável possam representar uma excelente
possibilidade de melhorar o comportamento dinâmico do sistema de potência, ainda
existem grandes desafios a serem superados pela integração desta tecnologia as redes
elétricas, no que diz respeito aos diversos problemas operacionais que podem ocorrer,
especialmente sob um nível de penetração elevado [8,9]. Dentre os problemas, pode-se
destacar o fenômeno de instabilidade de tensão, considerado há algum tempo uma
preocupação constante na operação dos sistemas de potência modernos.
Restrições ambientais e financeiras embargam a expansão do sistema de
transmissão, fazendo com que os sistemas de potência operem próximos aos seus
limites de capacidade, aumentando os riscos de instabilidade de tensão. Os
equipamentos que compõem o sistema de transmissão, o tipo de gerador e a natureza da
8
carga, influenciam fortemente a estabilidade de tensão. A expansão do sistema de
transmissão brasileiro não consegue acompanhar o aumento da demanda e da geração
eólica no país [3].
A estabilidade de tensão esta associada à capacidade do sistema em manter
tensões adequadas em todas as suas barras após um distúrbio. Geralmente, a
instabilidade aparece na forma de uma queda progressiva e descontrolada da tensão em
algumas barras, provocada por mecanismos de restauração da carga e reservas
insuficientes de potência reativa [10-12]. A instabilidade de tensão é um fenômeno nãolinear, de caráter local, mas pode abranger a maioria/totalidade do sistema de potência
pela atuação em cascata dos equipamentos de proteção. Dependendo da característica da
carga, os fenômenos envolvidos na estabilidade de tensão podem ser de natureza rápida
ou lenta. Nesta tese, a ênfase será dada aos fenômenos de longo-prazo, com duração de
vários segundos até poucos minutos, ao contrário da instabilidade de curto-prazo que se
dá poucos segundos após a ocorrência da perturbação na rede.
A instabilidade de tensão pode ocorrer pelo aumento gradual da carga ou
operação em contingência. Em ambos os casos, quando o sistema de potência opera
estressado com altos níveis de carregamentos, próximo do limite de máxima
transferência de potência, uma sequência de eventos pode levar o sistema de potência ao
colapso de tensão [10-12]. Pode-se citar como exemplos de blecautes os que atingiram
parte dos Estados Unidos e Canadá em agosto de 2006, Itália em 2003 e Grécia em
2004 [13-15].
O transformador com comutador de tap sob carga OLTC (On-Load Tap
Changer), o limitador de sobre-excitação da corrente de campo OEL (Over-Excitation
Limiter) das máquinas síncronas e o motor de indução são os principais equipamentos
que contribuem para a instabilidade de tensão [10-12]. O OLTC é indispensável para
grandes consumidores industriais e redes de distribuição, pois aumenta a capacidade de
máxima transferência de potência através do controle da posição do tap, contudo esse
processo acelera a depreciação da tensão. O OEL é uma proteção contra sobreaquecimento do enrolamento de campo devido elevadas solicitações de potência reativa
e quando este equipamento atua, a excitação é reduzida drasticamente, normalmente
levando o sistema de potência ao colapso de tensão. O motor de indução é uma das
principais máquinas utilizadas na indústria em diversos segmentos, contudo o alto
consumo de potência reativa combinada com as ações do OLTC e do OEL pode levar o
sistema de potência ao colapso de tensão.
9
Inicialmente, grande parte dos aerogeradores a velocidade variável operavam
sob fator de potência constante, normalmente próximo do unitário para vender a maior
potência ativa disponibilizada pelos ventos. Entretanto, com o aumento da penetração
eólica, os aerogeradores passaram a contribuir para o balanço de potência reativa do
sistema de potência, controlando a tensão terminal da central eólica. Nesse contexto, o
modo de controle do DFIG será analisado sob o ponto de vista da estabilidade de tensão
de longo-prazo.
Em 2014, espera-se que o Brasil ultrapasse a capacidade de 4.400 MW de
potência eólica instalada, dividindo com o grande potencial hidrelétrico existente, a
responsabilidade de atender a demanda [5]. Particularmente na região nordeste, os
ciclos hidrológico e eólico se complementam, conforme mostrado na Figura 1.4. Para
incentivar o suporte de potência reativa pelos aerogeradores, os operadores de sistema
pelo mundo todo oferecem compensações financeiras aos investidores de energia eólica.
Desse modo, quando a velocidade dos ventos é baixa a produção de potência ativa
diminui disponibilizando capacidade de potência reativa, podendo o aerogerador
oferecer um suporte adequado ao controle de tensão. Apesar das tecnologias a
velocidade variável serem capazes de fornecer potência reativa, a sua produção depende
também das limitações de tensão e corrente dos conversores de potência. Nesse
contexto, a estabilidade de tensão foi analisada sob regimes de velocidades de ventos
altas e baixas, indicando que nas baixas velocidades de ventos, o aerogerador pode
funcionar de modo similar ao compensador síncrono.
1.3
Objetivos
O objetivo deste trabalho é analisar a contribuição de aerogeradores para a
estabilidade de tensão de longo-prazo, considerando os limites de capacidade de cada
tecnologia impostos pelos conversores de eletrônica de potência, ação combinada do
OLTC e OEL, o modo de controle do aerogerador (fator de potência ou tensão
terminal), as condições do regime de ventos (velocidades altas e velocidades baixas). Os
limites de potência reativa são descritos, matematicamente, por curvas de capacidade,
tal como nas máquinas síncronas e modificados segundo a condição de operação do
aerogerador. Essas características são incorporadas aos controles das malhas de tensão e
velocidade dos aerogeradores a velocidade variável, constituindo os limites variáveis.
Todo o estudo foi realizado utilizando o ANAREDE (Programa de Análise de Redes) e
10
o ANATEM (Programa de Análise de Transitórios Eletromecânicos), ferramentas
desenvolvidas pelo CEPEL (Centro de Pesquisas em Energia Elétrica) e amplamente
utilizadas pelo setor elétrico para realização de estudos de expansão e operação do
sistema elétrico brasileiro. Os principais objetivos desta tese são:
Analisar o impacto de diferentes tipos de tecnologias de aerogeradores na
estabilidade de tensão de longo-prazo, como aerogeradores do tipo DFIG, FRC e
SCIG, bem como o impacto do aumento de seu nível de penetração no sistema;
Analisar as diferentes formas de curva PV (Power-Voltage Curves) das barras de
carga do sistema de potência e a sua relação com a modelagem dos
equipamentos dinâmicos presentes no sistema, incluindo os aerogeradores, além
de seu impacto direto no ponto de máximo carregamento do sistema;
Representar as limitações impostas pelos conversores de potência nas condições
de operação por curvas de capacidade para os aerogeradores a velocidade
variável;
Analisar o impacto dos diferentes modos de controle do DFIG na estabilidade de
tensão de longo-prazo, operando através do controle de tensão ou controle do
fator de potência;
Analisar a influência do comportamento dos ventos na capacidade de
controlabilidade dos aerogeradores de velocidade variável para fornecimento de
potência reativa e controle da tensão terminal;
Analisar os efeitos dos limites variáveis representados pelas curvas de
capacidade dos aerogeradores nas malhas de controle de tensão e potência ativa;
Avaliar a contribuição do conversor GSC do DFIG para a estabilidade de tensão
de longo-prazo.
11
1.4
Revisão Bibliográfica
Nos últimos anos, diversas pesquisas foram realizadas para avaliar o impacto da
integração da geração eólica na estabilidade de tensão, sob o ponto de vista do curtoprazo.
Os estudos de estabilidade de tensão de curto-prazo produzidos na literatura
focam na capacidade de sobrevivência a afundamentos de tensão, comumente referida
como ridethrough, procedimento adotado pelos operadores de sistemas no mundo todo
para aumento da margem de estabilidade. O procedimento ridethrough determina que os
aerogeradores devam permanecer conectados ao sistema de potência e na maioria dos
casos, fornecendo suporte de potência reativa para rápida recuperação da tensão
terminal. No Brasil, o Operador Nacional do Sistema Elétrico (ONS) não exige
fornecimento de potência reativa dos aerogeradores durante o procedimento de
ridethrough [16]. Muitos autores produziram vários trabalhos nessa linha de pesquisa
considerando aerogeradores a velocidade fixa e variável [17-23]. Todos os autores
reconhecem que a geração eólica a velocidade variável é benéfica para a margem de
estabilidade. Porém, nada se pode concluir a respeito da estabilidade de tensão de
longo-prazo.
Alguns trabalhos também avaliaram os impactos ocasionados pela integração da
geração eólica na estabilidade de tensão utilizando a análise estática [24,25]. No
entanto, os modelos estáticos são insuficientes para descrever completamente o
fenômeno da instabilidade de tensão [10].
Corsi [26] apresenta uma análise detalhada do impacto da atuação do OLTC
bem como do OEL em simulações no domínio do tempo para a estabilidade de tensão
de longo-prazo. O autor também avalia as formas das curvas PV devido à ação dinâmica
do OLTC e do OEL, revelando que tais controles limitam a estabilidade de tensão e
despreza-los pode levar a falsas conclusões a respeito da margem de estabilidade de
tensão de longo-prazo. Complementando este trabalho, Corsi [27] propõe um método
para estimar um indicador de proximidade da estabilidade de tensão baseado no
equivalente de Thevenin através de medições de unidades fasoriais PMU (Phasor
Measurement Unit). Resultados mostram que o algoritmo é capaz de indicar com
precisão e rapidez o equivalente de Thevenin ao operador de sistema, fornecendo
subsídios para tomada de decisões em tempo real. Entretanto, o autor não considera a
participação da geração eólica. Até o momento, poucas publicações foram feitas
12
analisando os efeitos da geração eólica na estabilidade de tensão de longo-prazo,
avaliando o desempenho dinâmico do sistema e a interação entre dispositivos de
proteção e controle contínuos e discretos, tais como o OLTC e o OEL.
Freitas [28] avalia a estabilidade de tensão considerando cargas estáticas em um
sistema de distribuição com presença de geração eólica. A estabilidade de tensão foi
investigada pela análise dinâmica considerando o SCIG (Squirrel Cage Induction
Generator). Adicionalmente, o autor avalia a estabilidade de tensão pelas curvas PV
plotadas de forma “quase-dinâmica” (o valor final das variáveis foram armazenadas e
novas simulações foram realizadas resgatando o ponto de operação da simulação
anterior). O autor conclui que a geração eólica degrada a margem de estabilidade de
tensão quando a potência ativa injetada pela geração distribuída aumenta. A principal
contribuição deste trabalho deve-se a análise da influência do SCIG na estabilidade de
tensão por intermédio das curvas PV. Contudo, o autor não leva em consideração os
aerogeradores a velocidade variável, os quais possuem potencial para melhorar a
estabilidade de tensão.
Houssain [29] analisa os problemas ocasionados pela integração de grandes
parques eólicos que consistem de aerogeradores a velocidade constante e variável em
sistemas de potência de grande porte sob o ponto de vista da estabilidade de tensão de
curto-prazo e a estabilidade angular a pequenas perturbações. Vários estudos de caso
são apresentados, contudo muitas conclusões são conhecidas por muitos estudos
anteriores, como exemplo: a alta compensação de potência reativa por bancos de
capacitores pode levar o sistema de potência ao colapso, devido principalmente à
qualidade pobre de compensação do banco de capacitores, a qual é um elemento passivo
[10,11]. Aerogeradores a velocidade constante deterioram a margem de estabilidade de
tensão devido o alto consumo de potência reativa durante a falta [17,18,30]. O eixo
mecânico do aerogerador pode interagir com modos de oscilação mal-amortecidos
conduzindo o sistema de potência a instabilidade [31]. Porém, alguns resultados
interessantes são apresentados, como o caso das interações adversas entre equipamentos
FACTS (Flexible AC Transmission Systems) e o uso excessivo desses equipamentos
como compensação para aerogeradores SCIG, podendo levar o sistema de potência à
instabilidade em ambos os casos. Ao considerar o DFIG nos estudos de curto-prazo, a
capacidade de potência reativa não é explorada ao máximo, levando o autor a
conclusões bastante pessimistas a respeito da capacidade de sobrevivência do DFIG. A
principal contribuição desse estudo deve-se a integração dos grandes parques eólicos
13
com equipamentos FACTS, podendo ocorrer interações adversas para o sistema de
potência.
Complementando o estudo anterior, Pereira [32] trata da estabilidade de tensão
de curto-prazo e de longo-prazo em uma mesma simulação, considerando a capacidade
de sobrevivência e as ações do OLTC e OEL com a integração de aerogeradores SCIG e
equipamentos FACTS, tais como o STATCOM (Static Compensator) e o SVC (Static
Var Compensator). Assim como no estudo anterior, o autor conclui que o SCIG é
prejudicial para a estabilidade de tensão do sistema de potência, devido ao aumento do
consumo de potência reativa com o aumento do escorregamento. Por este motivo se faz
necessária à utilização dos equipamentos STATCOM e SVC para compensação de
potência reativa do parque eólico. Os estudos comprovaram que os equipamentos
FACTS contribuem para a melhoria da estabilidade de tensão do sistema de potência,
evitando inclusive o colapso de tensão. Contudo, o STATCOM apresenta um
desempenho melhor do que o SVC devido à característica corrente constante, a qual a
potência reativa injetada varia linearmente com a tensão, enquanto que para o SVC a
potência reativa injetada varia com o quadrado da tensão sofrendo grandes
consequências para o suporte de potência reativa durante a ocorrência de faltas. Em
geral, o autor conclui que um equipamento STATCOM de menor capacidade pode
fornecer suporte adequado ao controle de tensão, quando seria necessário um SVC de
maior capacidade para cumprir satisfatoriamente o mesmo controle de tensão.
Ullah [33] analisa a estabilidade de tensão de longo-prazo e de curto-prazo
considerando aerogeradores a velocidade fixa e variável, operando com controle de
fator de potência ou controle de potência reativa. A curva de capacidade é limitada
basicamente pela corrente máxima do conversor, produzindo um semicírculo com raio
igual à potência aparente do conversor, desprezando o limite imposto pela potência
mecânica da turbina. A respeito da estabilidade de tensão no longo-prazo, o autor
considera um caso otimista, no qual a velocidade do vento é baixa e as reservas de
potência reativa são altas, além de considerar a velocidade do vento constante durante
toda a simulação, ou seja, desprezando os efeitos dos limites variáveis nas malhas de
controle dos conversores. O autor considera o efeito depreciativo do OLTC em
simulações no domínio do tempo, concluindo que o controle de potência reativa pelos
aerogeradores a velocidade variável é positivo para o aumento da margem de
estabilidade de tensão do sistema de potência, entretanto o efeito crucial do OEL não foi
considerado nas simulações.
14
Ming [34] propõe duas estratégias de controle para o DFIG: controle da tensão
terminal e controle do fator de potência. O autor avalia a estabilidade de tensão por
meio de simulações estáticas (fluxo de carga), quase-estáticas (levando em consideração
equações dinâmicas com perturbações muito lentas) e simulações dinâmicas no domínio
do tempo e conclui que o modo de controle da tensão terminal permite um aumento da
margem de estabilidade de tensão em relação ao controle do fator de potência, porém
ambos os modos de controle conseguem manter a tensão em intervalos limitados. A
grande contribuição deste trabalho deve-se a investigação dos modos de controle do
DFIG na estabilidade de tensão, porém o autor desconsidera os limites variáveis nas
malhas de controle do DFIG.
Lund [35] formulou matematicamente os limites que definem a curva de
capacidade do DFIG, a saber: limite de corrente do rotor, limite de corrente do estator e
limite de tensão do rotor. O controle de potência reativa é feito, prioritariamente, pelo
RSC de modo que a corrente do conversor é o principal fator limitante para a produção
de potência reativa, enquanto os limites térmicos dos enrolamentos do estator
determinam a máxima capacidade de absorção de potência reativa. A tensão do rotor
apresenta limitações somente quando o escorregamento é elevado, nesse caso a proteção
de subtensão atuaria desconectando o aerogerador. Dessa forma, as principais restrições
da curva de capacidade do DFIG são a corrente do rotor, a corrente do estator e o limite
de potência mecânica imposta pela turbina eólica. Devido à necessidade de
magnetização da máquina, o DFIG possui uma capacidade maior de absorver do que
injetar potência reativa, considerando apenas o controle do conversor do lado do rotor
RSC. Porém, esse estudo não avalia a estabilidade de tensão de longo-prazo sem
mencionar como os limites da curva de capacidade poderiam ser incorporados aos
limites das malhas de controle de potência ativa e reativa do DFIG.
Engelhardt [36] leva em consideração efeitos adicionais na construção da curva
de capacidade do DFIG, como por exemplo: perdas, filtros para melhoria da qualidade
da energia, influência das baixas velocidades na temperatura de junção dos
semicondutores, saturação do núcleo magnético e tensão máxima do conversor do lado
da rede. Dentre esses efeitos, a temperatura de junção dos conversores impõe restrições
severas para o fornecimento de potência reativa. O autor apresenta a contribuição do
GSC na curva de capacidade, indicando que o limite de potência reativa do DFIG pode
ser estendido quando este conversor entra em operação. Ao final do estudo, o autor
indica como os limites da curva de capacidade podem ser incluídos nas malhas de
15
controle do DFIG, entretanto, o autor não realiza simulações visando avaliar esses
efeitos na estabilidade de tensão de longo-prazo.
Konopinski [37] aborda exclusivamente o DFIG em todas as suas análises,
levando em consideração a formulação matemática da curva de capacidade proposta por
Lund [35]. A curva de capacidade nesse estudo considera somente a contribuição do
RSC. O autor discute o suporte de potência reativa quando o DFIG é restrito a operar
com fator de potência na faixa 0,95 adiantado/atrasado (devido a normas
regulamentadoras do operador de sistema) ou usando todo o limite de potência reativa
que a curva de capacidade pode oferecer. Segundo as análises estáticas baseadas no
fluxo de carga ótimo visando à operação econômica do sistema de potência, o autor
concluiu que o aumento da penetração eólica, a operação com fator de potência restrito,
causa o aumento das perdas no sistema de potência, elevando os custos de operação.
Análises dinâmicas de curto-prazo revelaram que a operação com fator de potência
restrito pode levar o sistema de potência ao colapso de tensão mesmo quando o
aerogerador opera em uma situação conservadora, na qual a velocidade dos ventos é
baixa e as reservas de potência reativa são abundantes, porém não podem ser utilizadas
devido à regulamentação imposta pelo operador de sistema. A grande contribuição deste
trabalho deve-se a representação adequada da curva de capacidade, com a inclusão
destes limites nas malhas de controle do DFIG nos estudos dinâmicos. Entretanto, o
autor não explora completamente a capacidade de potência reativa da máquina,
desprezando a contribuição essencial do GSC para a estabilidade de tensão de longoprazo.
Kayikçi [38] estuda diferentes estratégias de controle de potência reativa para o
DFIG considerando analises de curto-prazo com foco no ridethrough. O autor adota
corretamente a curva de capacidade do DFIG, sendo que o controle de potência reativa
pode ser realizado, exclusivamente, pelo RSC/GSC ou particionado entre ambos os
conversores, porém os limites das malhas de controle são fixos e iguais a 1 p.u.. O autor
também discute qual das componentes da corrente do rotor (
ou
deve ser
priorizada durante a falta; concluindo que a escolha depende da relação R/X do sistema
de potência. Para faltas próximas ao aerogerador DFIG (R/X baixa) recomenda-se que a
componente
seja priorizada, pois a componente reativa da impedância da rede é
predominante, ao passo que para faltas distantes do aerogerador DFIG (R/X alta)
recomenda-se que a componente
seja priorizada, pois a componente ativa da
16
impedância da rede é predominante e priorizar, equivocadamente, o controle de
potência reativa pela componente
pode produzir uma resposta oscilatória
comprometendo a estabilidade do sistema de potência. O autor atenta para o controle
coordenado entre conversores RSC e GSC para evitar uma corrente de circulação entre
as malhas do estator e rotor causando grande absorção, desnecessária, de potência
reativa durante a falta. O autor adota diferentes dimensionamentos para os conversores
RSC e GSC dependendo da estratégia de controle adotada. O autor conclui que o
controle coordenado é a melhor estratégia para o controle de tensão. A principal
contribuição deste trabalho está no emprego do GSC para o suporte de potência reativa,
entretanto análises de longo-prazo não são realizadas e nada se pode concluir a respeito
da estabilidade.
Meegahapola [39] estuda o DFIG considerando a curva de capacidade completa
baseada na formulação matemática de Lund [35]. A autor implementa uma estratégia de
controle coordenado entre o RSC e o GSC, na qual o RSC assume o controle primário
de tensão e caso a reserva de potência reativa seja insuficiente para atender a demanda,
o GSC assume o excedente de potência reativa. O conversor GSC é sobredimensionado
em 50% de sua capacidade, para aumentar a capacidade de injeção de reativos,
principalmente quando o conversor RSC é bloqueado pela proteção de crowbar durante
o transitório provocado por uma falta. Nesse sentido, um primeiro estudo aborda os
benefícios do controle coordenado para a melhoria da estabilidade transitória, entretanto
em relação à Kayikçi [38] os limites das malhas de controle são variáveis com as
condições de ventos e determinados pela curva de capacidade. Um segundo estudo
adota um controle secundário de tensão para um alimentador radial de um sistema de
distribuição, sendo que a repartição de potência reativa é feita através de um estatismo,
o qual pode ser fixo ou adaptativo, conforme a localização do aerogerador no
alimentador. Esse estudo abrange um horizonte de longo-prazo (10 minutos) visando
mitigar a flutuação da tensão sobre o alimentador devido à variação da velocidade do
vento. Apesar de considerar o OLTC, o sistema teste é extremamente simples e não
opera de forma estressada e nenhuma conclusão pode ser feita a respeito da estabilidade
de tensão de longo-prazo. A principal contribuição deste trabalho é a implementação de
um controle de tensão entre aerogeradores com repartição de potência reativa através de
estatismo adaptativo, o qual pode apresentar resultados positivos para a estabilidade de
tensão de longo-prazo, dependendo de qual estratégia de controle seja empregada.
17
Ullah [40] discute a viabilidade técnica e econômica do FRC como fornecedor
de potência reativa para o sistema de potência, formulando um modelo de custo da
energia reativa a ser paga pelo operador de sistema, auxiliando-o na tomada de decisão
para operação ótima do sistema de potência. Conforme o aerogerador expande a sua
capacidade de potência reativa, a capacidade dos conversores aumenta, onerando os
custos do serviço ancilar. Contudo, esses custos de sobredimensionamento representam
apenas 2,25% do investimento total do parque eólico quando o parque eólico opera com
fator de potência nominal de 0,9. O autor representa a curva de capacidade do FRC
considerando limitações de tensão e corrente dos conversores, sendo que a limitação de
tensão pode ser contornada com o sobredimensionamento dos componentes, expandindo
consideravelmente o limite de potência reativa do aerogerador. A principal contribuição
deste trabalho deve-se a formulação matemática do custo da potência reativa para o
operador de sistema, integrando definitivamente a geração eólica como uma fonte de
potência reativa qualificada, capaz de oferecer suporte para a manutenção da
estabilidade de tensão de longo-prazo.
Aumuller [41] investiga os impactos causados na estabilidade de tensão de
longo-prazo pelo gerador de alta tensão Powerformer. Esse gerador é uma máquina
síncrona, normalmente utilizada em usinas hidrelétricas ou termelétricas, conectada
diretamente ao barramento de alta tensão, dispensando o transformador elevador [42]. O
Powerformer é uma máquina síncrona de construção especial, na qual o enrolamento do
estator é constituído de cabos de alta tensão com isolação de XLPE (polietileno
reticulado), permitindo uma baixa corrente no estator, característica que confere um
aumento na capacidade de potência reativa do gerador [41,42]. Polinder [43] e
Blaabjerg [7] apontam que os aerogeradores de grande porte (acima de 10 MW) do
futuro serão conectados diretamente ao sistema de transmissão em alta tensão, seja por
uma conexão CC ou CA, de forma semelhante ao Powerformer. Aumuller [41] compara
o Powerformer com o gerador síncrono convencional, considerando os efeitos do OLTC
e dois modelos de OEL com características de atuação diferentes. O autor destaca que
um alto ganho do OEL pode contribuir para ocorrência mais rápida do colapso de
tensão. O autor ainda conclui que o Powerformer na maioria dos casos apresenta um
desempenho dinâmico melhor do que o gerador síncrono convencional, postergando o
colapso de tensão do sistema de potência. Apesar de não considerar a geração eólica
neste trabalho, a grande contribuição do autor deve-se ao uso do Powerformer o qual
18
apresenta uma capacidade de potência reativa muito grande e a escolha adequada dos
ganhos do OEL.
Tazil [44] aborda uma revisão geral sobre os avanços tecnológicos do DFIG nos
últimos 25 anos, cobrindo uma vasta pesquisa na literatura mundial com mais de 180
referências bibliográficas do assunto. O autor aborda as diferenças entre os sistemas
eólicos a velocidade constante e velocidade variável, a modelagem do aerogerador
DFIG, controle de passo da turbina eólica, técnicas de controle vetorial para as malhas
de potência ativa e reativa, softwares para simulação e implementação experimental do
DFIG, aspectos relacionados à conexão do aerogerador DFIG ao sistema de potência,
operação em sistemas isolados e outras áreas de aplicações. Sobre toda essa imensa
revisão bibliográfica do autor, não consta trabalhos mencionando contribuições ou
análises com aerogeradores a velocidade variável para a estabilidade de tensão de
longo-prazo.
Nota-se que a literatura ainda carece de trabalhos com análises detalhadas no
que se refere aos aspectos dinâmicos que contribuem e impactam no processo da
instabilidade de tensão de longo-prazo envolvendo a geração eólica.
1.5
Estrutura da Tese
Esta tese de doutorado está organizada da seguinte forma:
O Capítulo 1 apresenta uma breve descrição da situação da energia eólica no
contexto nacional e internacional, discutindo aspectos relacionados com a
integração de parques eólicos na rede elétrica no que se refere ao problema de
estabilidade de tensão, além do objetivo proposto nesta tese. É feita uma revisão
bibliográfica dos principais trabalhos relacionados ao tema apresentado;
No Capítulo 2 são apresentados os componentes de um sistema eólico para fins
de geração de energia elétrica, descrevendo os principais sistemas a velocidade
fixa e velocidade variável, bem como os geradores utilizados, o controle da
turbina eólica e um panorama atual do mercado eólico de fabricantes;
No Capítulo 3 é apresentada uma introdução aos conceitos básicos de
estabilidade de tensão, descrição do mecanismo da instabilidade de tensão de
19
longo-prazo envolvendo os equipamentos OLTC e OEL, característica das
cargas estáticas, curvas PV estáticas, máximo carregamento e limite de
carregamento do sistema de potência e a complementariedade entre a análise
estática e a análise dinâmica para a estabilidade de tensão de longo-prazo;
O Capítulo 4 aborda o aerogerador DFIG, tratando da representação estática para
fluxo de carga, a modelagem dinâmica para estudos de estabilidade de tensão de
longo-prazo do gerador de indução de rotor bobinado, da turbina eólica e o
controle de passo, os conversores RSC e GSC com suas respectivas malhas de
controle, a curva de capacidade do DFIG considerando a operação do conversor
GSC fornecendo ou não potência reativa para o sistema de potência e a definição
dos limites variáveis das malhas de controle;
O Capítulo 5 trata da modelagem do FRC para representação estática e dinâmica
considerando os limites variáveis nas malhas de controle. Será apresentada a
curva de capacidade do FRC para definição dos limites variáveis das malhas de
controle;
No Capítulo 6 são apresentados os resultados referentes aos estudos de casos: i)
avaliação dos impactos causados pela integração de aerogeradores SCIG e
DFIG, ii) influência dos modos de controle do DFIG (controle de tensão ou fator
de potência), iii) influência do regime de ventos na capacidade de potência
reativa do DFIG e iv) contribuição do conversor GSC para a estabilidade de
tensão de longo-prazo;
Finalmente, no Capítulo 7 são apresentadas as conclusões relativas a cada estudo
de caso analisado no Capítulo 6. Além disso, conclusões finais sobre o impacto
da integração de aerogeradores para a estabilidade de tensão de longo-prazo e
sugestões de trabalhos futuros visando à investigação de assuntos não
explorados nesta tese.
20
1.6
Trabalhos Publicados
R. R. Londero, C. M. Affonso, J. P. A. Vieira, Impactos Causados pela
Integração de Aerogeradores DFIG e Gaiola na Estabilidade de Tensão de
Longo-Prazo em Sistemas Elétricos, XII Simpósio de Especialistas em
Planejamento da Operação e Expansão Elétrica, Maio 2012, Rio de Janeiro,
Brasil, pp.1-9;
R. R. Londero, C. M. Affonso, J. P. A. Vieira, U. H. Bezerra, Impact of
Different DFIG Wind Turbines Control Modes on Long-Term Voltage Stability,
Innovative Smart Grid Technologies (ISGT Europe), 2012 3 rd IEEE PES
International Conference and Exhibition, Oct 2012, Berlin, pp.1-7;
R. R. Londero, J. P. A. Vieira, C. M. Affonso (2012), Comparative Analysis of
DFIG Based Wind Farms Control Mode on Long-Term Voltage Stability,
Advances in Wind Power, Dr. Rupp Carriveau (Ed.), ISBN: 978-953-51-0863-4,
InTech, DOI: 10.5772/52690.
R. R. Londero, C. M. Affonso, J. P. A. Vieira, Contribuição de Aerogeradores a
Velocidade Variável para a Estabilidade de Tensão de Longo-Prazo, XIII
Simpósio de Especialistas em Planejamento da Operação e Expansão Elétrica,
Maio 2014, Foz do Iguaçu, Brasil, pp.1-10;
R. R. Londero, C. M. Affonso, J. P. A. Vieira, Long-Term Voltage Stability
Analysis of Variable Speed Wind Generators, IEEE Transactions on Power
Systems (artigo aceito para publicação). 2014.
21
Capítulo 2
Sistemas Eólicos
2.1
Introdução
A cada ano muitos consumidores adquirem acesso à energia elétrica pelo mundo todo.
O aumento da demanda de energia torna o sistema de potência cada vez mais solicitado,
necessitando de reforços e construção de novas linhas de transmissão. As fontes
renováveis fizeram emergir a importância da preservação ambiental e da diversificação
das fontes de energia na matriz energética.
Neste contexto, a energia eólica ganhou bastante importância no cenário
mundial, alcançando níveis de penetração elevados. Nos anos 80, a concepção
dinamarquesa de aerogeradores ganhou bastante popularidade pelo baixo custo de
instalação e simplicidade operacional, conquistando grande aceitação no mercado e na
indústria. Contudo, devido a grande penetração e incapacidade de fornecer suporte a
rede elétrica, muitos estudos concluíram que este tipo tecnologia oferece sérios riscos
para a operação segura e confiável do sistema, especialmente do ponto de vista da
estabilidade. Para o sistema de potência oferecer operação segura e aceitável, tornou-se
imprescindível o fornecimento de serviços ancilares por parte dos grandes parques
eólicos. Capacidade de sobrevivência a afundamentos de tensão (fault ride-through) e
controle de tensão terminal são alguns dos serviços ancilares exigidos, pelos operadores
de todo mundo, aos grandes parques eólicos conectados ao sistema de transmissão e
subtransmissão.
Neste capítulo são apresentados os sistemas eólicos a velocidade constante e a
velocidade variável, destacando suas vantagens e desvantagens para conexão à rede
elétrica. Em seguida, os principais componentes de um sistema eólico e um panorama
do mercado eólico mundial entre os principais fabricantes.
22
2.2
Sistemas Eólicos a Velocidade Constante
Cronologicamente, os sistemas eólicos a velocidade constante foram os
primeiros sistemas de grande porte instalados pelo mundo, dominando o mercado eólico
nos anos 80 com a chamada concepção dinamarquesa.
Nos sistemas eólicos a velocidade constante, a frequência do gerador é fixada
pela frequência da rede elétrica. O rotor não pode girar a uma velocidade maior do que a
velocidade síncrona, embora haja uma pequena variação de 1 a 2% devido ao
escorregamento do gerador, relativo à potência gerada. Mudanças na velocidade do
vento não afetam a velocidade do rotor, mas causam flutuações no torque
eletromagnético, podendo comprometer a qualidade da energia gerada, especialmente
para redes elétricas fracas [30]. À medida que aumenta a capacidade do parque eólico,
aumenta também o nível de curto-circuito no ponto de conexão com a rede elétrica de
tal forma que o parque eólico não pareça mais desprezível frente ao sistema de potência.
Sistemas eólicos a velocidade constante normalmente empregam o gerador de
indução em gaiola (SCIG), pois a característica de velocidade constante é atraente para
carregamento variável. Por este motivo o gerador de indução em gaiola é diretamente
conectado a rede elétrica, e devido à sua construção simples e robusta, o gerador de
indução em gaiola é a alternativa mais barata para produção de energia elétrica.
Sistemas eólicos a velocidade constante não aproveitam ao máximo todo o
potencial eólico disponível nos ventos, pois a velocidade específica de ponta de pá
(Tip Speed Ratio) é variável, fazendo com que, na maioria das vezes, a turbina não
esteja em operação otimizada. Nesse caso, a turbina eólica é projetada para uma
velocidade de vento a qual ocorre com maior probabilidade no local. Esta velocidade de
vento esta relacionada a um único
que proporciona o máximo aproveitamento
energético da turbina eólica. Para velocidades excessivas ocorre descolamento natural
das linhas de fluxo sobre a pá em um processo conhecido por estol (Stall). O estol pode
ser controlado a ocorrer em outras velocidades de vento, mas para isso é necessário que
o ângulo de passo
seja modificado. Sistemas eólicos a velocidade constante,
normalmente, não possuem esse tipo de controle, conduzindo toda estrutura a maiores
cargas mecânica com risco de excitação de modos estruturais (torre, pás e eixo
mecânico) [17].
Máquinas de indução em gaiola invariavelmente consomem potência reativa,
muitas normas regulamentadoras de operadores de sistema determinam que sejam
23
instalados bancos de capacitores para correção do fator de potência [16]. Como a
máquina de indução em gaiola não possui excitação é necessário que tal máquina
absorva potência reativa para formar o campo magnético girante durante o processo de
energização e partida da máquina. Por este motivo emprega-se comumente soft-starters
para controlar a corrente absorvida pela máquina do banco de capacitores de modo a
realizar uma partida mais suave sem grandes transitórios para o sistema de potência [2].
2.3
Sistemas Eólicos a Velocidade Variável
Nos sistemas eólicos a velocidade variável, a frequência da rede é desacoplada
da frequência do rotor a partir da utilização de conversores estáticos de eletrônica de
potência. Tais conversores possibilitam a operação em velocidade variável do rotor da
turbina eólica. Em função deste desacoplamento, surge a designação de aerogeradores a
velocidade variável. Os principais aerogeradores dessa categoria são: o gerador de
indução duplamente excitado (DFIG) e o gerador síncrono com conversor de
capacidade nominal (FRC).
A capacidade de variar a velocidade do rotor aumenta a flexibilidade de
operação da turbina fazendo com que a velocidade específica de ponta de pá seja
constante, normalmente projetada para alcançar a máxima eficiência da turbina. Para
velocidades excessivas, a turbina é descarregada gradualmente pelo controle do ângulo
de passo, fazendo com que a estrutura não seja submetida a cargas mecânicas elevadas.
A capacidade do conversor não esta relacionada à potência nominal do gerador,
mas em função da banda de velocidades que o conversor irá operar definindo assim a
potência de escorregamento sobre o rotor. Dessa maneira, o custo do conversor aumenta
conforme a largura da banda de velocidades [45]. Tipicamente, a banda de velocidades
é selecionada -40% a +30% em torno da velocidade síncrona (0,6 – 1,3 p.u.). A
operação em velocidade variável apresenta algumas vantagens em relação aos esquemas
que operam a velocidade constante:
Redução da fadiga e stress no sistema de mecânico e em toda estrutura;
Diminuição do custo de manutenção, aumento do intervalo de operação do
aerogerador e melhora na qualidade de energia;
Aproveitamento ótimo do recurso eólico;
Diminuição do nível de ruído aerodinâmico.
24
2.4
Principais Componentes de um Sistema Eólico
A grande maioria dos sistemas eólicos atuais é de eixo horizontal com a turbina
eólica posicionada a montante do escoamento do vento conforme a Figura 2.1, para
evitar efeito de sombra da torre, ocasionando um torque pulsante podendo fadigar as pás
do rotor [45]. A configuração dos componentes inseridos na nacele não é única,
podendo o gerador estar na base da torre para diminuir o peso sob a mesma. Porém,
comumente a configuração descrita na Figura 2.1 é a mais usada pelos fabricantes de
aerogeradores no mundo [45]. Para estudos de estabilidade, os seguintes componentes
devem ser considerados:
Figura 2.1 Estrutura de um aerogerador de eixo horizontal.
Turbina eólica: responsável por transformar a energia cinética do vento em
energia mecânica de rotação;
Caixa de engrenagens: responsável por transmitir a energia mecânica entregue
pelo eixo da turbina (baixa rotação) para o eixo do gerador (alta rotação).
25
Geradores síncronos multipolos não utilizam este componente, e neste caso o
eixo da turbina é acoplado diretamente ao eixo do gerador, como é o caso do
FRC. São conhecidos como sistemas de acoplamento direto (Direct Drive);
Gerador elétrico: os geradores mais usados para aplicações em sistemas eólicos
são as máquinas de indução com rotor em gaiola (para velocidade constante),
máquina de indução com rotor bobinado, máquina síncrona eletricamente
excitada e máquina síncrona a imã permanente (todas usadas para velocidade
variável);
Sistema de controle: destina-se ao controle e monitoramento do aerogerador
para maximização da potência extraída dos ventos e proteção de toda a estrutura.
Para o parque eólico agregar maiores quantidades de potência, os aerogeradores
são interligados e espaçados de maneira adequada tal que o escoamento turbulento seja
minimizado de uma turbina para outra. O ponto de conexão com a rede elétrica é feito
por uma subestação de grande porte que conecta todo o parque eólico (não mostrado na
Figura 2.1). Já a conexão com o parque eólico é feito por um transformador de pequeno
porte, normalmente 690 V : 6,9 kV, localizado na base da torre de cada aerogerador.
2.5
Turbina Eólica
A turbina eólica é o principal componente de um aerogerador, pois através dela
ocorre a conversão de energia contida na massa de ventos para energia mecânica de
rotação.
As turbinas eólicas devem ser projetadas de modo a extrair a maior quantidade
de potência dos ventos. A potência contida numa massa de ventos é dada por [17]:
onde:
: potência contida na massa de ventos [Watts];
: densidade do ar [kg/m3];
: área coberta pelas pás do rotor
[m2];
26
: raio da pá [m];
: velocidade do vento [m/s].
A potência extraída pela turbina
de uma massa de ventos é dada por [17]:
(2.2)
onde:
: coeficiente de potência [adimensional].
O coeficiente de potência é função do ângulo de passo
específica de ponta de pá
Sendo que
e da velocidade
(Tip Speed Ratio – TSR), dada por [17]:
é a velocidade tangencial na ponta da pá,
a velocidade de
rotação da turbina no eixo da turbina. Nos sistemas eólicos a velocidade constante, o
coeficiente de potência é função somente de
e o ângulo de passo
é fixo. Nesse caso
a turbina eólica é projetada para atingir a potência nominal em um determinando
,
enquanto que nos sistemas a velocidade variável, o coeficiente de potência é função
tanto de
como de
proporcionando uma extração maior de potência dos ventos,
devido à capacidade de posicionamento angular das pás.
O coeficiente de potência é um número menor que a unidade e limitado ao valor
máximo teórico de 59,3% estabelecido por Betz. Comercialmente, as turbinas eólicas
possuem coeficiente de potência máximo situado na faixa de 25-45% [2]. É nítido
através da equação (2.2) que uma turbina eólica consegue extrair mais potência de uma
massa de ventos quanto maior o coeficiente de potência.
A Figura 2.2 representa a turbina eólica sob o ponto de vista aerodinâmico. O
método do Momento dos Elementos das Pás BEM (Blade Element Momentum) é usado
para calcular o torque mecânico imposto às pás pela ação do vento, possibilitando a
determinação da potência mecânica extraída pela turbina
[17,46].
Turbinas eólicas são movidas por forças de sustentação L (Lift) e arrasto D
(Drag). As modernas turbinas eólicas trabalham prioritariamente pela ação de forças de
sustentação [17,45,46]. A força de sustentação é responsável por produzir torque
27
mecânico, enquanto a força de arrasto é a principal responsável pelas solicitações
mecânicas impostas à turbina. Cada elemento de seção da pá de comprimento
infinitesinal
contribui para o torque mecânico. O plano
define o plano de
rotação das pás.
Figura 2.2 Representação aerodinâmica de uma turbina eólica [17].
A Figura 2.3 representa um elemento de seção da pá. O plano
plano do rotor, ou seja, o plano no qual o elemento de seção da pá
dista
define o
do cubo do
rotor. A linha de corda representa a linha a qual contém o comprimento transversal do
elemento, denominado corda. O ângulo de ataque
velocidade relativa
à
é medido em relação ao vetor
e a linha de corda, e o ângulo de passo
é medido em relação
e o plano do rotor. Quando a pá está em movimento o vetor velocidade relativa
possui componentes axial
e tangencial ao movimento da pá
, dados por [17]:
(2.4b)
28
Sendo
a velocidade do vento incidente não perturbado,
mecânica de rotação da turbina e os coeficientes
e
a velocidade
originados pela formação do
vórtex ao redor do elemento, os quais dependem das características aerodinâmicas da
pá. Quando a turbina está parada, o vetor velocidade relativa
vetor velocidade do vento não perturbado
está alinhado com o
. Nesta situação o ângulo de ataque
é
elevado (próximo de 90o) e a componente de arrasto da força resultante é dominante.
Porém, à medida que o vento incide sobre a turbina, a mesma ganha velocidade e o
ângulo de ataque
vai diminuindo, a componente tangencial
da velocidade relativa
vai aumentando e a componente de sustentação da força resultante aumenta.
Figura 2.3 Elemento de seção da pá na posição
[17].
Para o caso de uma turbina com três pás, amplamente produzida pela indústria
eólica, para geração de energia é esperado que a velocidade tangencial seja 5 a 10 vezes
maior do que a velocidade do vento não perturbado, ou seja,
[47].
O melhor desempenho para a seção de aerofólio ocorre quando o ângulo de
ataque
é mantido constante, isto é, a velocidade específica de ponta de pá é mantida
constante em seu valor ótimo
. Dessa forma, conhecida a velocidade do vento não
perturbado , a malha de controle de velocidade calcula a velocidade do rotor para
manter a turbina em operação ótima seguindo
, especificado pelo projeto
aerodinâmico. Este desempenho ótimo só pode ser alcançado nos esquemas de
velocidade variável graças aos conversores de estáticos de eletrônica de potência.
As forças de sustentação
e arrasto
são dadas por [17]:
29
(2.5b)
Sendo
o comprimento da corda,
e
os coeficientes de sustentação e
arrasto, respectivamente. Estes coeficientes são determinados por meio de medições em
túnel de vento variando-se o ângulo de ataque, definindo as características de
sustentação e arrasto de um aerofólio [46,47]. Estas curvas revelam que para ângulos de
ataque pequenos, o coeficiente de sustentação é alto, crescendo de forma
aproximadamente linear, enquanto o coeficiente de arrasto é quase nulo. Curvas típicas
mostram que a partir de
o escoamento não é mais laminar e ocorre descolamento
das linhas de fluxo da parte superior do aerofólio, produzindo uma diferença de pressão
da parte superior para a inferior que reduz o coeficiente de sustentação e aumenta o
coeficiente de arrasto, iniciando o processo conhecido por estol [46].
A força de arrasto
de sustentação
alinha-se com a velocidade relativa
é perpendicular à velocidade relativa
enquanto a força
. A força resultante
componentes de arrasto e sustentação, conforme a Figura 2.4. Se
possui
, um torque de
aceleração é produzido movimentando a turbina com velocidade de rotação
entregando potência mecânica
tangencial
ao eixo da turbina. Entretanto, somente a força
a qual está alinhada com plano do rotor
produção de movimento. A força axial
é usada efetivamente para
atua ao longo do eixo da turbina e
responsável pelo estresse mecânico da estrutura [46,47].
y1
F
Fax
L
D
x1
Ft
Linha de Corda
V REL
Figura 2.4 Forças atuantes em um elemento de seção da pá.
Por inspeção da Figura 2.4, a força axial e a força tangencial são dadas por [17]:
30
(2.6b)
Multiplicando-se a força axial e a força tangencial pela distância
o cubo do rotor até o elemento de seção da pá
e um elemento torque tangencial
produz um elemento de torque axial
em relação ao centro da pá, respectivamente.
Integrando-se ao longo de todo o raio da pá
obtem-se o torque axial
medida desde
e multiplicando pelo número de pás
e o torque tangencial
A potência mecânica produzida pela turbina
,
sobre a pá, dados por [17]:
será dada por:
(2.8)
O coeficiente de potência pode ser calculado pelas equações (2.2) e (2.8),
Percebe-se que o coeficiente de potência tem forte relação com a força de
sustentação. Pela Figura 2.4 quanto maior a força de sustentação, menor a força de
arrasto e maior a força tangencial, dessa forma o torque tangencial sofre forte influência
da força de sustentação, e consequentemente o coeficiente de potência também.
Para a turbina eólica gerar mais potência, independente das condições de vento,
os fabricantes aumentam a altura da torre e o diâmetro das pás do rotor para que a
turbina cubra uma maior aérea e consequentemente absorva mais ventos, desenvolvendo
mais potência, conforme (2.1). Em elevadas altitudes, a velocidade dos ventos é maior e
31
o escoamento menos turbulento, reduzindo o estresse mecânico sobre as pás. A Figura
2.5 mostra a evolução da potência das turbinas eólicas com diâmetro do rotor.
Figura 2.5 Evolução da potência das turbinas eólicas com aumento do diâmetro [2].
2.5.1 Controle de Posição das Pás da Turbina Eólica
As turbinas eólicas utilizam dois tipos de controle aerodinâmico para limitar a
potência extraída e evitar sobrecargas à estrutura. As turbinas mais modernas
empregadas em esquemas a velocidade variável adotam o controle de passo (Pitch
Control), enquanto os esquemas a velocidade constante usam o controle estol (Stall
Control).
O controle estol é um sistema passivo que reage à velocidade do vento. As pás
do rotor são fixas em seu ângulo de passo e não podem girar em torno de seu eixo
longitudinal. O ângulo de passo é escolhido de forma que, para velocidades de vento
superiores à nominal, o escoamento descola-se naturalmente da superfície da pá e o
escoamento torna-se turbulento, produzindo o efeito estol. Esse descolamento das linhas
de fluxo sobre o perfil das pás reduz a força de sustentação e aumenta a força de arrasto,
diminuindo o coeficiente de potência e consequentemente a potência extraída pela
turbina eólica. Os sistemas eólicos a velocidade constante normalmente adotam este tipo
de controle. Para melhorar o aproveitamento energético, alguns sistemas a velocidade
constante utilizam o controle de estol ativo (Active Stal Control), o qual regula ângulo
de passo
sobre um pequeno intervalo negativo de valores [17], ampliando um pouco a
banda de velocidades de operação da turbina.
32
À medida que a velocidade do vento aumenta, a velocidade específica de ponta
de pá decresce. Nesse momento o ângulo de ataque
aumenta causando o
descolamento das linhas de fluxo do perfil da pá e o processo de estol se inicia,
conforme mostra a Figura 2.6.
O controle estol é mais simples do que o controle de passo porque as turbinas
não necessitam de um sistema de posicionamento da pá. Em comparação ao controle de
passo, as turbinas eólicas com controle estol apresentam estrutura do cubo do rotor mais
simples e necessidade de menor manutenção devido a menor quantidade de peças
móveis.
Para o controle de passo, quando a velocidade do vento está abaixo da
velocidade nominal, a turbina eólica opera extraindo o máximo de potência disponível
do vento, operando em
e o ângulo de passo
é reduzido de modo que o coeficiente
de potência seja máximo [46]. Outras estratégias de controle fixam o ângulo de passo
próximo de
para extração da máxima potência do vento [17]. Ultrapassada a
velocidade nominal, o ângulo de passo aumenta, reduzindo o coeficiente de potência
para manter a potência nominal de saída.
(c)
(a)
(b)
Figura 2.6 Controle Estol: o aumento do ângulo de ataque
(d)
proporciona um maior descolamento do
escoamento sobre a pá.
A Figura 2.7 mostram curvas de potência para sistemas eólicos a velocidade
variável (controle de passo) e a velocidade constante (controle estol). A curva de
potência tem três pontos chaves na escala de velocidade:
33
Velocidade de partida: velocidade mínima para produzir potência útil;
Velocidade nominal: velocidade do vento a qual produz a potência nominal;
Velocidade de corte: velocidade de vento para a qual a turbina é desconectada
pela ação do sistema de controle de passo para evitar a fadiga do rotor.
1000
Velocidade Constante
Velocidade Variável
900
800
Potência [kW]
700
600
500
Velocidade
Nominal
400
Velocidade
de Corte
Velocidade
de Partida
300
200
100
0
0
5
10
15
20
Velocidade do vento [m/s]
25
30
Figura 2.7 Curva de Potência para aerogeradores de 850 kW.
2.6
Caixa de Engrenagens
Normalmente, os geradores de indução não possuem muitos polos. O estator e o
rotor são feitos de material ferromagnético e o entreferro apresenta pequena espessura,
de tal forma que uma pequena corrente é necessária para produção de fluxo magnético
e, consequentemente, do torque eletromagnético. Nas máquinas com muitos polos, o
entreferro aumenta bastante, necessitando de um fluxo magnético elevado e de uma
corrente elétrica elevada para produzir o mesmo torque eletromagnético que uma
máquina com poucos polos. Portanto, devido ao baixo número de polos, o eixo do
gerador opera em velocidades relativamente altas, ao passo que o eixo da turbina
trabalha em baixas velocidades, incompatibilizando o acoplamento direto. Para
solucionar esse problema, uma caixa de engrenagens multiplica a velocidade da turbina
pela relação de engrenagens para que a velocidade no eixo do gerador seja alta. Devido
a natureza do potencial eólico, a rotação da turbina encontra-se na faixa de 15 a 20 rpm,
enquanto o eixo de alta velocidade (eixo do gerador) opera na faixa 1200 a 1800 rpm.
34
A caixa de engrenagens, além de pesada e encarecer o custo final do projeto
(25% do custo sem instalação), é o equipamento mecânico que mais apresenta falhas,
necessitando de mais manutenções. Conforme aumenta a relação de engrenagens, mais
caro, complexo e pesado torna-se a caixa de engrenagens. O ruído aerodinâmico e as
perdas aumentam com a quantidade de engrenagens [47]. Por estas razões, muitos
fabricantes desenvolveram aerogeradores sem a caixa de engrenagem, ou seja, com
acoplamento direto entre a turbina e o gerador (Direct Drive). Geralmente, os geradores
empregados nos sistemas de acoplamento direto são máquinas síncronas multipolos de
baixa frequência o que permite trabalhar em velocidades compatíveis com a geração
eólica.
2.7
Gerador
Durante o período de 2005 a 2009, os preços das turbinas aumentaram em
resposta a crescente demanda global, elevando os custos de material e outros fatores. No
entanto, a produção em larga escala e o aumento da eficiência, melhoraram o fator de
capacidade e reduziram os custos de fabricação das turbinas, bem como os custos de
operação e manutenção. Como resultado, a energia eólica onshore (turbinas instaladas
em terra) apresenta agora um custo competitivo mais barato do que a energia
convencional em alguns mercados (alguns locais na Austrália, Índia e os Estados
Unidos), embora o novo gás de xisto esteja, em alguns países, dificultando a competição
da energia eólica (e outras energias renováveis) com o gás natural. Instalações offshore
(turbinas instaladas no mar) permanecem pelo menos duas vezes mais caro que as
onshore [48].
Os 10 maiores fabricantes de aerogeradores do mundo representaram 77% do
mercado mundial em 2012. Eles vieram da China (4), Europa (4), Índia (1) e Estados
Unidos (1). A Vestas (Dinamarca), o maior fabricante desde 2000, rendeu sua liderança
a GE Wind (terceiro em 2011), devido principalmente ao forte mercado dos Estados
Unidos. A Siemens saltou de nono (2011) para terceiro, seguido por Enercon
(Alemanha) e o Grupo Suzlon (Índia), as quais subiram um posto em relação a 2011.
Outras empresas de topo foram Gamesa (Espanha) e Goldwind, United Power, Sinovel
e Mingyang (toda a China); tanto Goldwind e Gamesa caíram do top cinco, conforme
mostra a Figura 2.8. Diante desse contexto são apresentadas as tecnologias de
aerogeradores mais usadas por fabricantes no mercado mundial.
35
A Tabela 2.1 apresenta os 10 maiores fabricantes de aerogeradores no mundo
relativo ao ano de 2012. Nota-se que os sistemas a velocidade variável (DFIG, FRC e
GFC) estão dominando o mercado eólico, porém os sistemas a velocidade fixa (SCIG)
ainda encontram-se disponíveis com mercado reduzido.
Mingyang (CHN)
3%
United Power
(CHN)
5%
Outras
23%
Suzlon (IND)
7%
Vestas (DIN)
14%
Siemens (ALE)
9%
Sinovel (CHN)
3%
Goldwind (CHN)
6%
GE Wind (EUA)
16%
Enercon (ALE)
8%
Gamesa (ESP)
6%
Figura 2.8 Divisão de mercado eólico entre os maiores fabricantes em 2012 [1,48].
Tabela 2.1 Os 10 maiores fabricantes de aerogeradores no mundo em 2012 [43].
Fabricante
GE Wind (EUA)
Conceito
Diâmetro do Rotor (m) Potência (MW)
DFIG
77 – 120
1,5 – 2,85
FRC (PM)
113
4,1
Vestas (DIN)
DFIG
80 – 100
1,8 – 3
GFC PM
112 – 164
1,8 – 8
Siemens (ALE)
GFC IG
82 – 120
2,3 – 3,6
FRC (PM)
101 – 154
3–6
Enercon (ALE)
FRC (EE)
48 – 126
0,8 – 7,5
Suzlon (IND)
SCIG
52 – 88
0,6 – 2,1
DFIG
95 – 97
2,1
Gamesa (ESP)
DFIG
52 – 114
0,85 – 2
GFC PM
128
4,5
Goldwind (CHN)
FRC (PM)
70 – 109
1,5 – 2,5
United Power (CHN) DFIG
77 – 100
1,5 – 3
FRC (PM)
100
3
Sinovel (CHN)
DFIG
60 – 113
1,5 – 5
Mingyang (CHN)
DFIG
77 – 83
1,5
GFC PM
92 – 108
2,5 – 3
* GFC (Gear and Full Converter), PM (Permanent Magnets), IG (Induction
Generator), EE (Electrically Excited)
36
2.7.1 Gerador de Indução em Gaiola (SCIG)
A concepção mais usual e predominantemente adotada pelos fabricantes para o
gerador de indução em gaiola considera a ligação direta do estator da máquina na rede
elétrica. Durante a partida para formação do campo magnético girante do estator, o
gerador consome grandes quantidades de potência reativa. Para suavizar a partida,
emprega-se uma chave estática soft-starter, que tem como objetivo reduzir a corrente de
partida durante a energização da máquina. A Figura 2.9 apresenta o esquema de ligação
do gerador de indução em gaiola com a rede elétrica.
Além da chave estática, estes sistemas são compostos por bancos de capacitores,
os quais são responsáveis pela excitação da máquina. O banco de capacitores é
requerido por diversas normas de operadores de sistema [16], para que o parque eólico
não drene potência reativa do sistema, podendo comprometer sua operação e
estabilidade [17]. Entretanto, o banco de capacitores não oferece um suporte adequado
ao aerogerador, pois a potência reativa fornecida depende da tensão do barramento, a
qual pode estar sendo afetada por fatores externos, proporcionando uma qualidade pobre
no fornecimento de potência reativa [49].
Soft-Starter
Caixa de
Engrenagens
Barra do
Gerador
Gerador de
Indução em
Gaiola
Barra
Terminal
Sistema
de
Potência
Transformador
de Potência
(Subestação)
Banco de Capacitores
Figura 2.9 Gerador de indução em gaiola conectado diretamente a rede elétrica.
Para melhorar o aproveitamento energético do potencial eólico, algumas vezes
são empregados dois geradores de indução, sendo um para baixas velocidades e outro
para altas velocidades, obviamente esta concepção encarece bastante o aerogerador,
além de não conseguir o melhor aproveitamento possível. Para baratear a solução
anterior, o estator é construído com dois enrolamentos de polos diferentes isolados entre
si, de tal forma que o rotor comute o número de polos conforme a velocidade do vento.
Entretanto, o custo ainda é elevado sem conseguir aproveitar integralmente todo o
potencial eólico disponível.
37
As máquinas de indução são ligadas às turbinas eólicas através de caixas de
engrenagens. Esse acoplamento indireto reflete a fragilidade do eixo do gerador perante
amortecimento de oscilações provocadas por faltas ou súbitas mudanças na velocidade
do vento. O comportamento do SCIG quando inserido em sistemas eólicos a velocidade
constante é investigado em detalhes no Capítulo 6.
2.7.2 Gerador de Indução Duplamente Excitado (DFIG)
Diferentemente do SCIG, o DFIG consiste de um gerador de indução de rotor
bobinado, pelo qual um controle de baixa potência através do conversor RSC comanda
a potência ativa e reativa que circulam pelo estator, conforme a Figura 2.10. Os
conversores proporcionam operação em velocidade variável, desacoplando a frequência
do sistema da rotação do gerador. Esses conversores são dimensionados pelo máximo
escorregamento que a máquina irá operar, garantindo uma banda de velocidades maior,
podendo aproveitar ao máximo o potencial eólico em diferentes velocidades de vento.
Tipicamente, a potência desses conversores varia 25-30% da potência do gerador [2].
Caixa de
Engrenagens
Gerador de
Indução de
Rotor Bobinado
Ps jQs
Estator
Crowbar
RSC
(ligado ao rotor)
Barra
Terminal
Pt jQ t
Sistema
de
Potência
Transformador de
Acoplamento
Rotor
PT
Barra do
Gerador
Transformador
de Potência
(Subestação)
Pr jQr
Pc jQc
VC
GSC
(ligado ao estator)
Figura 2.10 Gerador de indução duplamente excitado ligado à rede elétrica.
Na maioria dos casos, os conversores estáticos adotam modulação PWM (Pulse
Width Modulation) produzindo harmônicos em altas frequências, barateando o custo do
filtro. Porém, existem técnicas de modulação que eliminam harmônicos e seus
correspondentes múltiplos, como é o caso da SHEM (Selective Harmonic Elimination
Modulation PWM) [2]. Chaves estáticas do tipo IGBT (Insulated Gate Bipolar
Transistor) montadas em ponte são comumente usadas nos conversores estáticos, pois
38
proporcionam frequências de chaveamento maiores com menores perdas de
chaveamentos e redução significativa no conteúdo harmônico do sinal de corrente,
substituindo os antigos tiristores [50].
A geração de potência ocorre tanto para operação sobre-síncrona (acima da
velocidade síncrona) quanto sub-síncrona (abaixo da velocidade síncrona). Acima da
velocidade síncrona, tanto o estator quanto o rotor fornecem potência ativa para o
sistema de potência, enquanto abaixo da velocidade síncrona, o rotor consome potência
ativa, mas o estator sempre fornece potência ativa, graças aos conversores estáticos que
permite o fluxo de potência ativa entrando ou saindo do rotor. Diferentemente, o
gerador de indução em gaiola necessita de operação sobre-síncrona para fornecer
potência ativa para o sistema de potência.
Técnicas de controle vetorial, especialmente de campo orientado, proporcionam
relativo desacoplamento entre as malhas de controle de potências ativa e reativa. Desse
modo, o DFIG pode controlar independentemente as potências ativa e reativa, como
fazem os geradores síncronos convencionais. Essa importante característica confere
capacidade ao DFIG de poder controlar a tensão terminal ou fator de potência da
máquina.
Inicialmente, o DFIG era controlado com fator de potência constante,
normalmente unitário, para fornecer maior quantidade de potência ativa para os
consumidores, pois a venda de energia era exclusivamente sobre a potência ativa. Com
o crescimento da penetração de aerogeradores nos sistemas de potência por todo o
mundo, o DFIG passou a ser responsável por fornecer também potência reativa,
obrigatoriamente, em condições de falta [21]. Entretanto, muitos operadores de sistemas
por todo mundo, oferecem aos aerogeradores a velocidade variável compensações
financeiras quando fornecem serviços ancilares ao sistema de potência [40,51].
O DFIG pode fornecer potência reativa pelo estator e pelo conversor GSC.
Porém, frequentemente o GSC opera com fator de potência unitário, não fornecendo
potência reativa para o sistema de potência, controlando somente a tensão do link CC.
Caso esse conversor opere com fator de potência diferente do unitário, a capacidade de
potência reativa será aumentada [36], oferecendo maior suporte para o controle de
tensão. No Capítulo 4, por meio das curvas de capacidade do aerogerador DFIG, será
demonstrada a capacidade adicional de potência de potência reativa do GSC.
39
2.7.3 Gerador Síncrono com Conversor de Capacidade Nominal (FRC)
O gerador síncrono foi a solução adotada por fabricantes para eliminar a caixa de
engrenagens da nacele. A fabricante alemã Enercon foi a pioneira nessa concepção,
dominando uma fatia considerável no mercado de fabricantes de aerogeradores. A caixa
de engrenagens, além de encarecer o custo final do aerogerador, é o equipamento
mecânico que mais apresenta falhas, necessitando de maiores manutenções. Outra
vantagem da eliminação da caixa de engrenagens é a redução do peso sobre a torre,
aumento da eficiência do sistema mecânico com redução do ruído aerodinâmico.
Para compensar a baixa velocidade da turbina eólica, o gerador síncrono é
projetado com um número de polos elevado. Como consequência, o torque de partida
para essas máquinas é elevado, tornando o gerador mais pesado e menos eficiente do
que os geradores convencionais para turbinas eólicas [2]. Para aumentar a eficiência e
diminuir o peso, o estator dos geradores com acoplamento direto é projetado com
grande diâmetro, necessitando de naceles maiores do que as convencionais, encarecendo
o projeto [45]. Para reduzir o custo referente ao aumento da nacele e não diminuir a
eficiência quando o torque é elevado, empregam-se caixas de engrenagens com baixa
relação de transformação, sendo estas mais baratas, leves e compactas do que as usadas
pelo DFIG. Esta concepção de gerador é chamada de GFC (Gear and Full Converter) e
foi adotada para suprir as carências do DFIG em relação às exigências de ridethrough
pelos operadores de sistema [43]. Esta concepção pode usar tanto o gerador síncrono,
seja eletricamente excitado ou a imã permanente quanto o gerador de indução em
gaiola, preferível pelo baixo custo e robustez.
Geradores síncronos não necessitam consumir potência reativa para formação do
campo magnético girante. A excitação pode ser via corrente de campo ou imã
permanente. Quando a máquina apresenta um enrolamento de campo é chamada de
eletricamente excitada (Electrically Excited). Máquinas com enrolamento de campo
mantém a tensão terminal constante, independente da variação da carga, graças ao ajuste
contínuo da corrente de campo por parte dos reguladores de tensão. Máquinas a imã
permanente (Permanent Magnets) não possuem controle sobre a excitação, mas são
construtivamente mais leves e menores e mais eficientes eletricamente em relação às
máquinas com enrolamento de campo, pois as perdas nos imãs devido as correntes
parasitas são bem menores do que as perdas no enrolamento de campo da máquina
eletricamente excitada [2].
40
Da mesma forma que o DFIG, o FRC usa conversores estáticos para operação
em
velocidade
variável.
Neste
esquema,
esses
conversores
proporcionam
desacoplamento total da frequência do sistema em relação à frequência do gerador. Uma
desvantagem é uso de conversores com potência nominal igual ao do gerador síncrono,
encarecendo o custo do conversor e do aerogerador.
Dependendo do gerador adotado (eletricamente excitado ou imã permanente), o
controle de potência ativa e reativa será diferente. Caso a máquina a imã permanente
seja escolhida, são usados dois conversores controlados: um no lado da máquina e outro
no lado da rede. Para a máquina eletricamente excitada, o conversor do lado da máquina
é uma ponte retificadora a diodos não controlada e o controle é feito por um chopper e
um inversor. Nesta tese será considerada somente a máquina eletricamente excitada,
conforme mostra a Figura 2.11.
A troca de potências ativa e reativa com a rede elétrica é feita pelo controle do
inversor através de técnicas de controle vetorial, proporcionando controle independente
de velocidade do rotor e da tensão terminal. O chopper do tipo boost controla a
qualidade da tensão no capacitor, o qual alimenta o inversor.
O Capítulo 5 é dedicado integralmente ao FRC, modelando todos os
componentes presentes na Figura 2.11, bem como a construção da curva de capacidade.
m2 2
m1
PT
V1
Gerador
Síncrono
I1
Xt1
Filtro
ICC1
I
RD
VCC1
Retificador
a Diodo
'
CC 2
Chopper
I CC 2
Barra
Terminal
V 2 Pt jQ t
VC
Xt 2
Inversor
Sistema
de
Potência
Transformador
de Potência
(Subestação)
Figura 2.11 Gerador síncrono com conversor de capacidade total ligado a rede elétrica.
2.8
Conclusões
Atualmente, os sistemas eólicos a velocidade constante estão perdendo espaço
para os sistemas eólicos a velocidade variável, os quais seguem dominando o mercado
eólico de fabricantes. No entanto, não há o domínio completo do mercardo eólico por
parte de somente uma única tecnologia, pois a variedade de aerogeradores está
aumentando. Os sistemas a velocidade variável usados atualmente têm seus pontos
fortes e fracos e deverão manter-se nos próximos anos [43].
41
No caso do DFIG, conversores de baixa potência (25-30% da potência nominal
do gerador) ligados ao rotor da máquina controlam as potências ativa e reativa entregues
à rede. Já para o FRC, os conversores devem ter a mesma capacidade do gerador,
encarecendo o custo do aerogerador, porém a grande vantagem dessa tecnologia é o
desacoplamento total da frequência do gerador sobre a frequência do sistema aliado a
eliminação da caixa de engrenagens.
Técnicas de controle vetorial com modulação PWM proporcionam o controle
independente de potências ativa e reativa, utilizando chaves IGBT com menores perdas
de comutação e de condução dos que os antigos tiristores usados nos primeiros
aproveitamentos. O link CC permite fluxo de potência ativa em ambos os sentidos,
podendo o DFIG consumir ou fornecer potência ativa pelo conversor GSC, dependendo
do escorregamento do rotor, o qual é controlado pelo conversor RSC.
Parques eólicos de grande capacidade normalmente conectados no nível de
transmissão oferecem serviços ancilares ao operador de sistema, na maioria das vezes
fornecendo potência reativa em momentos que as máquinas síncronas fornecem grandes
quantidades de potência ativa, operando sem reservas de potência reativa.
42
Capítulo 3
Estabilidade de Tensão
3.1
Introdução
Os primeiros problemas de estabilidade de sistemas de potência foram de natureza
angular. Na ocorrência de faltas próximas as unidades geradoras, a tensão terminal
afundava bruscamente, causando grande abertura angular entre as máquinas,
provocando velocidades excessivas, levando o sistema a perder o sincronismo. Por este
motivo este problema ficou conhecido na literatura como estabilidade angular. Os
sistemas de excitação eram bastante rudimentar e grande parte das máquinas operava
com excitação constante (sem controle de campo). Esta prática influenciava diretamente
para a perda de sincronismo entre as máquinas. Na época, a eletrônica de potência era
incipiente tecnologicamente e os sistemas de excitação apresentavam baixos ganhos, o
que por sua vez resultava em um torque de sincronismo insuficiente para conter a
aceleração do rotor. Com o desenvolvimento da eletrônica de potência, o regulador de
tensão tiristorizado com altos ganhos foi à solução adotada para este problema.
Na década de 60, a interconexão de sistemas de potência de grande porte
emergiu um problema de estabilidade associado a oscilações rotóricas de baixa
frequência não-amortecidas, causando excursões cada vez maiores dos ângulos dos
rotores, até o momento que a unidade geradora necessitava ser desligada. Estes
problemas eram devidos aos altos ganhos dos reguladores de tensão que reduziam a
componente de torque de amortecimento, provocando a oscilação da máquina contra
todo o sistema ou contra outras unidades geradoras. Este problema ficou conhecido
como estabilidade a pequenas perturbações, associado com pequenos distúrbios que o
sistema possa enfrentar, tal como aumento da carga ou modificações na topologia do
sistema de transmissão e subtransmissão no período pós-falta. O estabilizador de
sistemas de potência instalado em unidades geradoras, estrategicamente determinadas
43
pela análise modal, fornece amortecimento às oscilações de baixa frequência,
eliminando o problema.
O problema da estabilidade de tensão surgiu mais recentemente, como
consequência das características dos modernos sistemas de potência, que devido à falta
de investimentos no sistema de transmissão por restrições econômicas e ambientais,
tendem a ser operados bastante carregados. A instabilidade de tensão se caracteriza pelo
declínio progressivo das tensões em parte ou em todo o sistema, em períodos de tempo
que variam desde segundos até intervalos prolongados da ordem de dezenas de minutos.
O problema ocorre devido ao desbalanço entre a potência reativa demandada e a
potência reativa fornecida, porém a característica da carga, os equipamentos associados
ao controle da tensão, o controle automático da geração e o sistema de proteção, podem
influenciar significativamente na estabilidade de tensão.
Este capítulo tem por finalidade apresentar alguns conceitos básicos do
fenômeno da instabilidade de tensão, classificar os tipos de estabilidade de tensão,
descrever o mecanismo da instabilidade de tensão, abordar a curva PV e analisar a
estabilidade de tensão sob modelos estáticos (análise estática) e dinâmicos (análise
dinâmica).
3.2
Conceitos de Estabilidade de Tensão e Segurança de Tensão
A estabilidade de tensão está ligada ao conceito geral de estabilidade de sistemas
de potência conforme a definição proposta [12].
A Estabilidade de Sistema de Potência é a habilidade de um sistema elétrico de
potência, para uma dada condição de operação inicial, de retornar para um estado de
equilíbrio depois de ser submetido a um distúrbio físico, com a maioria das variáveis
limitadas tal que praticamente todo o sistema permaneça intacto.
Observe que este conceito não menciona a grandeza da perturbação e nem quais
variáveis de estado estão envolvidas. De fato, para um sistema ser estável todas as
variáveis devem estar limitadas em intervalos aceitáveis para qualquer que seja a
perturbação. O conceito de estabilidade enunciado aplica-se aos sistemas de potência
interconectados, ou seja, refere-se à estabilidade do sistema global e não a um
44
subsistema ou elemento. Por exemplo, algum gerador pode perder o sincronismo e, por
conseguinte, desconectado do sistema principal sem necessariamente levar todo o
sistema de potência à instabilidade. Do ponto de vista do operador de sistema, o sistema
de potência permanece estável, porém do ponto de vista do operador da usina, ocorreu a
instabilidade de uma unidade geradora.
A estabilidade de tensão é formulada com base nesse conceito, definindo a
variável de interesse como sendo a tensão, conforme proposto a seguir [12].
A estabilidade de tensão refere-se à habilidade de um sistema de potência em
permanecer com tensões estacionárias em todas as barras do sistema após ser
submetido a um distúrbio para uma dada condição de operação inicial.
A estabilidade é uma condição de equilíbrio entre forças que se opõem em um
sistema, de tal forma que estas forças se cancelam instantaneamente quando a
estabilidade é alcançada. Por exemplo, para a estabilidade angular, as forças em
oposição são os torques mecânico e elétrico, respectivamente, aplicados ao eixo do
gerador síncrono, de tal forma que em equilíbrio, o rotor não acelera ou desacelera, ou
seja, a velocidade permanece constante. Para a estabilidade de tensão as forças em
oposição são a potência fornecida e a potência demandada do sistema de potência, ou
seja, quando a potência demandada é igual à potência fornecida, a tensão permanece
constante. Caso a demanda seja maior do que a potência fornecida à tensão tende a cair
podendo levar o sistema de potência a instabilidade, caso nenhuma ação seja tomada.
A instabilidade de tensão é manifestada pelo declínio progressivo da tensão em
algumas barras após uma perturbação [12]. A instabilidade não representa
necessariamente o blecaute do sistema de potência, mas pode conduzi-lo a essa situação.
O colapso de tensão é um termo muito usado na literatura e refere-se à sequência de
eventos que levam ao blecaute ou tensões muito baixas em uma parte significativa do
sistema de potência [12]. Este fenômeno pode ser local, envolvendo um conjunto de
barras ou uma área de controle, neste caso sendo chamado de colapso parcial, ou
abrangendo a totalidade/maioria das barras do sistema de potência, denominando-se
colapso global.
Muitos autores apresentam definições diferentes dos termos instabilidade e
colapso de tensão apresentados. Segundo Kundur [49] e Taylor [11], a instabilidade de
45
tensão é o declínio incontrolável a níveis extremamente baixos, causando o blecaute do
sistema, enquanto o colapso de tensão é processo pelo qual o sistema é conduzido à
instabilidade. Segundo Van Cutsem [10] a instabilidade de tensão é o processo pelo
qual a tensão atinge um ponto de operação inaceitável, enquanto que o colapso de
tensão refere-se à inexistência do ponto de operação levando ao declínio incontrolável
da tensão.
Em situações de carregamento elevado, normalmente algum controlador ou
limitador atinge o seu limite, tornando o sistema de potência altamente não linear. Nessa
situação, as potências ativa e reativa interferem no controle de tensão. Portanto, a
instabilidade de tensão não é necessariamente um desbalanço de potência reativa, de
modo que pode ocorrer em sistemas de corrente contínua [10]. A necessidade de
potência reativa decorre da natureza dos sistemas de corrente alternada devido ao
defasamento angular entre tensão e corrente, embora o suporte de potência reativa, por
parte de geradores e outros componentes, seja conveniente para evitar a instabilidade de
tensão.
O fenômeno da instabilidade de tensão normalmente é associado a situações de
carga elevada que provoca subtensão nas barras. Embora menos comum, a instabilidade
de tensão pode ocorrer por sobretensão, com pelo menos um caso relatado na literatura
[12]. Nessa situação, a carga é baixa e o sistema de transmissão torna-se capacitivo
promovendo uma elevação incontrolável da tensão, causando atuação do limitador de
subexcitação das máquinas síncronas UEL (Under-Excitation Limiter) e dos
equipamentos de proteção, realizando sucessivos desligamentos de barras/linhas
levando o sistema de potência ao blecaute. Contudo, nesta tese o foco será dado ao
fenômeno de instabilidade de tensão por subtensão.
A instabilidade de tensão esta associada intrinsecamente à capacidade de
máxima transferência de potência do sistema de transmissão para a carga [10-12,49].
Quando a impedância característica (também conhecida por impedância de surto “surge
impedance”) da linha de transmissão é igual à impedância da carga, ocorre o casamento
de impedâncias, e nessa situação, a tensão na carga possui um perfil plano recebendo
potência igual à potência natural da linha SIL (Surge Impedance Loading). À medida
que a carga aumenta, o sistema de transmissão fornece potência maior do que o SIL,
tornando-se mais indutivo e a tensão tende a cair, provocando a instabilidade de tensão
por subtensão [49]. Para o caso de instabilidade por sobretensão, o sistema de
46
transmissão fornece potência menor do que o SIL, causando o efeito capacitivo da linha
quando a carga é baixa, levando o barramento a uma situação de sobretensão [12].
A instabilidade de tensão envolve os seguintes aspectos básicos:
A característica da carga envolvendo a dinâmica de restauração da carga;
Os equipamentos disponíveis para o controle de tensão na rede, os quais influem
na habilidade da rede de transferir potência dos pontos de geração até os pontos
de consumo;
O distúrbio ao qual a rede pode ser eventualmente submetida.
Dependendo da sensibilidade da carga em relação à tensão, pode-se ter três tipos
de cargas: potência constante, corrente constante e impedância constante. Todos esses
modelos adotam uma representação exponencial para a carga, sendo que o modelo de
potência constante independe da tensão, o modelo de corrente constante varia
linearmente com a tensão e o modelo de impedância constante depende do quadrado da
tensão. A sensibilidade da carga em relação à tensão influencia fortemente o processo
de restauração da carga, podendo levar o sistema de potência a instabilidade.
À medida que a carga aumenta a tensão tende a cair e a demanda solicitada por
cargas do tipo impedância constante tende a diminuir devido à dependência quadrática
com a tensão. Ações de equipamentos responsáveis pelo controle de tensão tentam
recuperar a tensão de algumas barras promovendo a restauração da carga. Contudo, a
capacidade do sistema de transmissão pode estar esgotada não suportando mais a carga
restaurada podendo surgir à instabilidade.
O transformador com comutador de tap sob carga OLTC, o limitador de sobreexcitação da corrente de campo OEL e o motor de indução são os principais
equipamentos que contribuem para a instabilidade de tensão.
O OLTC é indispensável para grandes consumidores industriais e redes de
distribuição, pois aumenta a capacidade de máxima transferência de potência através do
controle da posição do tap. Este equipamento mantém a tensão constante no barramento
até que seu limite seja atingido, desse modo, a carga no secundário do OLTC pode ser
considerada como potência constante, sendo esta característica mais crítica para a
estabilidade de tensão [10,11]. O OEL é uma proteção contra sobre-aquecimento do
enrolamento de campo devido a elevadas solicitações de potência reativa. Quando este
equipamento atua, a excitação é reduzida drasticamente, normalmente levando o sistema
47
de potência ao colapso de tensão. O motor de indução é uma das principais máquinas
utilizadas na indústria em diversos segmentos, contudo o alto consumo de potência
reativa combinada com as ações do OLTC e do OEL pode levar o sistema de potência
ao colapso de tensão.
Um distúrbio pode influenciar mais significativamente equipamentos e cargas
que tenham respostas rápidas ou lentas, contribuindo mais decisivamente para a
ocorrência de um ou outro tipo de instabilidade. Por exemplo, o motor de indução é
determinante para uma forma mais rápida de instabilidade, por outro lado um
incremento de carga influenciará mais fortemente na dinâmica lenta, pela característica
de atuação do OLTC [10,11].
O conceito de estabilidade não implica necessariamente em uma operação
satisfatória do sistema de potência. Por exemplo, um sistema de potência pode ser
estável após um corte de carga, perdendo uma grande quantidade de consumidores. Por
esta razão o conceito de segurança de um sistema de potência tem grande importância e
é apresentado a seguir [12]:
A Segurança de um Sistema de Potência refere-se ao grau de risco de sobrevivência de
iminentes distúrbios (contingências) sem interrupção do serviço ao consumidor.
Depende da condição de operação do sistema bem como a probabilidade do conjunto
de contingências.
O conceito de segurança está relacionado ao critério N-1, no qual o sistema de
potência deve ser capaz de operar sem interrupções de serviço ao consumidor, para
ocorrência de uma contingência.
A segurança de tensão (Security Voltage) refere-se a operação estável e
satisfatória de um sistema de potência seguido de uma contingência ou aumento de
carga [11]. Implica em uma considerável margem de estabilidade de tensão do ponto de
operação até o ponto de instabilidade de tensão (ponto de máxima transferência de
potência) seguido de contingências.
A seção 3.5 referente a curva PV apresentará o conceito de margem de
estabilidade de tensão e a relação entre operação segura e o conceito de capacidade de
transferência disponível intimamente ligado ao conceito de margem de segurança e
margem de estabilidade de tensão.
48
3.3
Classificação da Estabilidade de Tensão
Do ponto de vista do operador do sistema é importante reconhecer a forma de
instabilidade para que seja possível tomar medidas preventivas ou corretivas para
solucionar o problema de instabilidade.
A estabilidade de tensão pode ser dividida em duas categorias: estabilidade a
pequenas perturbações e estabilidade a grandes perturbações, conforme a Figura 3.1.
Estabilidade do
Sistema de Potência
Estabilidade de
Frequência
Estabilidade
Angular
Estabilidade a Pequenas
Perturbações
Curto-Prazo
Estabilidade de
Tensão
Estabilidade de
Tensão a Grandes
Perturbações
Estabilidade
Transitória
Curto-Prazo
Longo-Prazo
Curto-Prazo
Estabilidade de
Tensão a Pequenas
Perturbações
Longo-Prazo
Figura 3.1 Classificação da Estabilidade de Tensão dentro da Estabilidade de Sistemas de Potência [12].
A estabilidade de tensão a grandes perturbações (Large-Disturbance Voltage
Stability) refere-se à habilidade do sistema de potência em manter as tensões
estacionárias após a ocorrência de grandes perturbações tais como: curto-circuito, perda
de geração, ou contingência de circuitos [12]. Depende das características do sistema e
da carga, e das interações entre os controles contínuos e discretos, além dos
equipamentos de proteção. Dentre estes equipamentos com chaveamento discreto, podese citar os limitadores de corrente de campo e os transformadores com tap sob carga.
Requer a análise não-linear do sistema por meio de simulações no domínio do tempo,
por um período de tempo suficientemente grande para capturar as interações entre estes
equipamentos, podendo variar de alguns segundos a dezenas de minutos [12].
A estabilidade de tensão a pequenas perturbações (Small-Disturbance Voltage
Stability) refere-se à habilidade do sistema de potência em manter as tensões
estacionárias após a ocorrência de pequenas perturbações como a mudança gradual na
carga do sistema. Depende das características das cargas e dos controles contínuos e
49
discretos. Nesses estudos muitos autores empregam análises estáticas, baseadas nas
equações do fluxo de carga para avaliar a estabilidade de tensão por meio das curvas PV
para fornecer uma aproximação da margem de estabilidade de tensão. Por meio da
linearização das equações estáticas do fluxo de carga, pode-se obter profundas
informações sobre sensibilidade do sistema, determinando os trechos, barras e geradores
que podem oferecer riscos a estabilidade de tensão [12,49]. Esses estudos são
conduzidos dessa forma porque a dinâmica dos equipamentos envolvidos no controle de
tensão é muito lenta e a tensão atinge rapidamente o regime permanente, devido atuação
dos reguladores de tensão [11]. Contudo, a linearização não leva em conta efeitos nãolineares tais como as ações do OLTC e OEL. Logo, a combinação das análises linear e
não-linear, baseadas em simulações no domínio do tempo, devem ser usadas de maneira
complementar para fornecer subsídios para solucionar o problema de instabilidade de
tensão [12,49].
A estabilidade de tensão de curto prazo (Short-Term Voltage Stability) envolve a
atuação de componentes de dinâmica rápida, tais como motores de indução, cargas
eletronicamente controladas e conversores HVDC (High Voltage Direct Current) [12].
O período de estudo é da ordem de segundos até dezenas de segundos e a análise do
fenômeno requer a solução adequada de um sistema de equações diferenciais nãolineares, da mesma maneira que é feita para a estabilidade angular. A modelagem da
carga é essencial para capturar o fenômeno. Contudo, faltas próximas à carga são
importantes para manifestação da instabilidade de tensão de curto-prazo, diferentemente
do caso da estabilidade angular na qual faltas próximas ao gerador são as mais
importantes. É recomendado que o termo estabilidade transitória de tensão não seja
usado [12].
A estabilidade de tensão de longo prazo (Long-Term Voltage Stability) trabalha
com hipótese de que as oscilações de potência são completamente amortecidas, sendo
que a frequência do sistema é uniforme. Está associada ao aumento gradual da carga
com a curva de demanda diária e ações de controle de equipamentos que envolvem uma
dinâmica lenta, sustentando por longos períodos de desbalanço entre a potência ativa e
reativa do sistema [12]. O período de estudo da estabilidade de longo prazo pode se
estender de vários segundos até dezenas de minutos, e simulações no domínio do tempo
são necessárias para análise do comportamento dinâmico do sistema em conjunto com
análises estáticas para estimação da margem de estabilidade, identificação de fatores
que influenciam a estabilidade e avaliação de cenários de contingências [12].
50
No curto-prazo o sistema de potência é estável e a tensão recupera-se
rapidamente. Entretanto, a ação combinada de equipamentos com dinâmica lenta, tais
como o transformador com comutador de tap sob carga e o limitador de sobre-excitação,
desencadeia processos que levam a longos períodos de sustentados desbalanços de
potências ativa e reativa. O transformador com comutador de tap sob carga promove a
restauração da carga a longo-prazo e nessa situação o sistema de transmissão pode estar
congestionado ou a geração é insuficiente para atender a demanda, causando
afastamento da região de atração até ocorrer a instabilidade [12].
O foco desta tese está na estabilidade de tensão de longo prazo, através de
pequenas perturbações. A próxima seção descreve detalhadamente a cadeia de
processos que conduzem o sistema de potência ao colapso de tensão.
3.4
Mecanismo da Instabilidade de Tensão
Quando um sistema é submetido a um súbito aumento de demanda de potência
reativa seguido de uma contingência, a demanda adicional de potência reativa é dada
pelas reservas de potência reativa dos geradores e compensadores. Geralmente, existem
reservas suficientes de potência reativa e o sistema atinge um nível de tensão estável.
Contudo, é possível, devido a uma combinação de eventos e as condições do sistema,
que a demanda adicional de potência reativa possa levar o sistema ao colapso de tensão,
causando um blecaute parcial ou total.
Um cenário típico de colapso de tensão poderia ser como [49]:
O sistema de potência está operando em uma configuração topológica com
muitos de seus geradores fora de serviço. Como resultado, algumas linhas de
transmissão estão extremamente carregadas e as reservas de potência reativa
estão em um nível mínimo.
A perda de uma linha sobrecarregada causa uma sobrecarga adicional nas linhas
remanescentes, tornando o circuito fortemente indutivo, aumentando por sua vez
as perdas de potência reativa nas linhas (a potência reativa absorvida pela linha
aumenta rapidamente para cargas acima da impedância característica), causando
uma forte demanda de potência pelo sistema.
51
Imediatamente após a perda da linha, as tensões das barras próximas aos centros
de carga sofreriam uma redução considerável devido à demanda excedente de
potência reativa. Isto poderia causar uma redução de carga, consequentemente,
uma redução do fluxo de carga pelas linhas de transmissão produzindo um efeito
estabilizante. O regulador de tensão dos geradores restauraria rapidamente a
tensão terminal por um aumento na excitação. Nesse estágio, os geradores
poderiam estar operando dentro dos limites da curva de capacidade de suas
máquinas, ou seja, dentro dos limites de aquecimento da armadura e do campo.
O regulador de velocidade controlaria a frequência pela redução de potência
ativa.
A diminuição dos níveis de tensão nas linhas de transmissão próxima aos centros
de carga seria refletida para o sistema de distribuição. As subestações com
OLTC tentariam restaurar as tensões e a carga pelo lado do sistema de
distribuição para os valores de pré-falta em cerca de 2 a 4 minutos. Cada
mudança de tap do OLTC produziria um incremento no carregamento das linhas
de transmissão, aumentando as perdas ativas e reativas causando uma grande
queda de tensão no sistema de transmissão. Se a linha está carregada
consideravelmente acima da potência natural SIL, cada aumento no fluxo de
potência da linha causa várias perdas reativas na linha.
Como resultado, cada mudança no tap, aumenta a geração de potência reativa
pelos geradores para o sistema. Gradualmente, os geradores atingiriam seus
limites de potência reativa (imposto pela máxima corrente de campo
permissível) e ocorreria a atuação do OEL. Quando o primeiro gerador
alcançasse seu limite de corrente de campo, sua tensão terminal cairia. Em
tensão terminal reduzida para uma geração de potência ativa fixa, a corrente de
armadura aumentaria. A atuação do OEL limita a potência reativa injetada pelo
gerador para manter a corrente de armadura dentro dos seus limites permissíveis.
Logo, outros geradores repartiriam a demanda de potência reativa, atingindo
seus limites de capacidade de potência reativa e ocorreria a atuação do OEL para
outros geradores.
52
O processo avançaria, consequentemente, ao colapso de tensão em avalanche,
possivelmente levando a perda de sincronismo das unidades geradoras e a um grande
blecaute.
Na Itália, em 2003, um blecaute teve início pela saída de uma linha de
transmissão de 380 kV na Suíça, próxima da fronteira da Itália, que estava altamente
carregada [15]. A reconexão da linha após a falta não foi possível e vinte minutos
depois houve o desligamento de uma segunda linha de transmissão da Suíça, próxima
da fronteira da Itália, seguido de uma rápida sequência de desligamentos de várias
outras linhas devido a níveis de tensão muito baixos oriundos de uma instabilidade de
tensão. Como consequência do desbalanço entre geração e carga, a frequência do
sistema da Itália começou a cair, e após alguns segundos, a Itália sofreu um blecaute
total. Vários motivos foram reportados como responsáveis pelo blecaute, como ações
inadequadas de corte de carga dos operadores e um cenário de grande importação de
potência de países vizinhos.
Pode-se citar como ações corretivas contra o colapso de tensão o chaveamento
de banco de capacitores, bloqueio do tap de transformadores, redespacho da geração e
corte de carga [10-12,49].
3.5
Curva PV
Um dos métodos de análise estática mais utilizados para estudos de estabilidade
de tensão baseia-se na curva PV (Power-Voltage), a qual indica o carregamento máximo
do sistema de potência em regime permanente. A curva PV pode ser obtida pela solução
de sucessivos fluxos de carga, segundo o processo conhecido por fluxo de potência
continuado (Continued Power Flow). Para cada aumento na demanda, um problema de
fluxo de carga é resolvido, e os pontos de equilíbrio obtidos definem a curva PV. Esta
seção trata dos conceitos envolvendo curvas PV e a estabilidade de tensão e noções de
operação segura e estável traduzidas pelo termo segurança de tensão apresentado na
seção 3.1.
Considere o sistema de potência elementar mostrado na Figura 3.2 abaixo. Este
sistema é composto por um gerador conectado a um transformador elevador ligado a
uma linha de transmissão a qual alimenta uma carga terminal.
53
Xs V
XT
V1
X
V2
E
I
Figura 3.2 Sistema de potência elementar.
Conforme mencionado na seção 3.2, a estabilidade de tensão é um problema
intrínseco a natureza da carga e aos equipamentos que realizam o controle de tensão no
seu barramento. Por este motivo, a representação da carga é importante e normalmente
o gerador é tomado como um barramento infinito, conforme será adotado a seguir. Esta
suposição leva em conta que o nível de curto-circuito do sistema de transmissão
remanescente (representado pelo transformador, a linha de transmissão e carga) é muito
menor do que aquele no terminal do gerador. Assumindo que o gerador controla a
tensão
no lado de alta do transformador, as potências ativa e reativa transferidas a
carga serão dadas por:
Sendo
o ângulo de carga, definido pela diferença de fase das tensões
Pelo fato da tensão
e
.
ser mantida constante pelo gerador, a carga não “enxerga” a
reatância do transformador elevador
e nem a reatância do gerador
. A equação
(3.2) pode ser reescrita como:
Elevando-se ao quadrado as equações (3.1a) e (3.2) e somando-as, elimina-se
pela identidade trigonométrica
, resultando:
54
Resolvendo para
, obtém-se [10]:
Assumindo que a tensão
é mantida constante pelo controle do gerador e o
sistema de transmissão não altera sua topologia mantendo sua reatância
Logo, a tensão na carga
depende das potências ativa
e reativa
constante.
transferidas pelo
sistema de transmissão, definindo a característica da rede.
O modelo exponencial é comumente adotado em estudos de estabilidade de
tensão para representar a característica da carga estática. Logo, as parcelas de potência
ativa
sendo
e reativa
consumidas pela carga serão dadas por [10]:
o ponto de operação inicial o qual corresponde a tensão
demanda solicitada pela carga e
, z é a
os expoentes que definem a sensibilidade da
carga em relação a tensão aplicada na carga
.
Os expoentes denotam as diferentes características da carga, podendo assumir
qualquer valor. Entretanto, três características da carga são bastante conhecidas e
adotadas em muitos estudos de estabilidade de tensão: potência constante, corrente
constante e impedância constante. Essa classificação é dada quanto à sensibilidade da
carga em relação à tensão.
A característica de potência constante é independente do valor da tensão da
carga, ou seja, o consumo não se modifica com a variação da tensão aplicada ao
barramento. Nesse caso a sensibilidade é igual à zero. Para a característica de corrente
constante, o consumo varia linearmente com a tensão, assumindo sensibilidade igual a
1. Enquanto que, para a característica de impedância constante, o consumo varia com o
55
quadrado da tensão, assumindo sensibilidade igual a 2. A Tabela 3.1 resume as
sensibilidades quanto à característica da carga.
Tabela 3.1 Característica e sensibilidade da carga.
Característica
Potência Constante
Corrente Constante
Impedância Constante
Sensibilidade
0
1
2
As sensibilidades nem sempre são iguais, podendo as componentes ativa e
reativa variar de maneira diferente. Entretanto, assumindo a carga com fator de potência
constante, pode-se garantir que as sensibilidades são iguais e que as parcelas ativa e
reativa variam na mesma proporção [10]. Considerando uma carga com fator de
potência
constante e variando-se as potências ativa
e reativa
transferidas à
carga segundo (3.4), obtém-se a curva PV que representa a característica da rede.
Considerando uma carga com característica potência constante, para uma dada demanda
, a interseção da característica PV da carga com a característica PV da rede, define o
ponto de operação do sistema de potência, conforme apresenta a Figura 3.3.
1
A
0.9
0.8
Tensão na carga V2 [p.u.]
Vcrit
MET
0.7
0.6
Característica da Carga
Pmax
0.5
0.4
Característica da Rede
0.3
B
0.2
0.1
0
P0
0
500
1000
1500
2000
Carregamento [MW]
2500
3000
Figura 3.3 Curva PV e definição de margem de estabilidade de tensão MET.
A curva PV representa a variação da tensão da barra de carga com o aumento da
demanda. O limite de máxima transferência de potência é atingido em
e a partir
56
deste ponto nenhum acréscimo de potência pode ser transferido pelo sistema de
transmissão. Por este motivo,
é conhecido como ponto de máximo carregamento
[10]. Este ponto de operação, comumente referido na literatura como “nariz” da curva
PV, estabelece uma tensão crítica
abaixo da qual o sistema é considerado instável
para carga do tipo potência constante [10,11,49]. Essa afirmação pode ser facilmente
verificada pela Figura 3.3, observando que a partir de
a característica da carga
não intercepta a característica da rede, provocando inexistência de um ponto de
operação, levando o sistema de potência ao colapso de tensão pelo processo de
restauração da carga [10,52]. Acima de
corrente baixa, e abaixo de
a carga é suprida por tensão elevada e
tem-se uma solução das equações de fluxo de carga que
corresponderia ao atendimento da carga com tensão baixa e corrente elevada, podendo
levar a atuação da proteção, comprometendo ainda mais a estabilidade. Os valores
críticos variam de acordo com as condições do sistema, tais como despacho da geração,
limites dos geradores e fator de potência das cargas. Para cargas do tipo potência
constante, a interseção da característica da carga com a característica da rede resulta em
dois pontos de equilíbrio A e B. Conforme a carga aumenta, os pontos A e B deslocamse para o máximo carregamento, até que as duas soluções tornam-se iguais em
,
ponto de equilíbrio instável sela-nó a partir do qual ocorre o colapso de tensão [10].
A margem de estabilidade de tensão
é uma medida da capacidade de
transferência de potência do sistema de transmissão. Este índice é amplamente utilizado
e representa a distância, em MW ou em percentual, do ponto base de operação
ponto de máximo carregamento
até o
[11].
A margem de estabilidade de tensão
esta intimamente relacionada ao
conceito de margem de segurança relativo à segurança do sistema de potência,
conforme foi apresentado na seção 3.1.
A estabilidade do sistema de potência tem um efeito significativo nos mercados
elétricos competitivos [52]. À medida que a margem de estabilidade é degradada, seja
pela ocorrência de faltas ou contingências, os preços da geração tendem a se tornar mais
caros para garantir a estabilidade e limitando o consumo.
57
A margem de segurança é definida usando o conceito de Capacidade de
Transferência Disponível
do sistema de transmissão, segundo a NERC (North
American Electricity Reliability Corporation), matematicamente dada por [52]:
em que,
representa a Capacidade de Transferência Total
, corresponde a máxima potência
que pode ser transferida enquanto os limites térmicos das linhas de transmissão
limites de tensão nos barramentos
e os limites de estabilidade
, os
não são violados
para operação em contingência segundo o critério N-1, o qual estabelece operação
estável e satisfatória para o sistema de potência para o pior caso contingência. Os
compromissos existentes na transmissão
representam a carga inicial a qual o
sistema esta servindo antes da contingência. A margem de confiabilidade da
Transmissão
, considera possíveis incertezas na operação não previstas pelo
critério N-1, aumentando a margem de segurança, normalmente expressa como 5% da
em condição normal de operação [52]. Finalmente, a Margem de Benefício de
Capacidade
é utilizada para definir as exigências de reserva de capacidade de
transmissão para fornecer possíveis incrementos da demanda, sendo ela tipicamente
fixada em zero na prática, pois os incrementos esperados da demanda são considerados
no
e as cargas tendem a ser bastante inelásticas aos preços, logo relativamente
previsível não necessitando de margem para incertezas na operação. Por meio da curva
PV, a Figura 3.4 ilustra os conceitos apresentados anteriormente dividindo a curva PV
em duas regiões de operação: segura e não segura. Observe que, quanto maior a
maior será
e mais ampla será a faixa de operação segura.
A extensão da margem de estabilidade é uma preocupação constante para os
operadores de sistema, quer seja para garantir a estabilidade como para proporcionar um
atendimento adequado à carga. O aumento da geração eólica pelos sistemas de potência
do mundo todo emergiu muitos estudos de estabilidade para averiguar a contribuição
dessa tecnologia para margem de estabilidade. Esta tese apresenta uma contribuição
significativa da geração eólica para incrementar a margem de estabilidade.
58
1
0.9
CET
Tensão na carga V2 [p.u.]
0.8
CTD
CTT
0.7
MCT
0.6
0.5
Operação em
Contingência
Carga Máxima
para o critério N-1
0.4
0.3
Operação Normal
P0
0.2
0
Operação Não Segura
Operação Segura
0.1
0
500
1000
1500
Carregamento [MW]
2000
Figura 3.4 Definição da Capacidade de Transmissão Disponível
2500
.
A margem de estabilidade e consequentemente, a margem de segurança estão
ligadas pelo limite de máxima transferência de potência
conhecido também como
ponto de máximo carregamento. Associado ao máximo carregamento
crítica
esta a tensão
, conforme mostra a Figura 3.3. A tensão crítica ocorre quando (3.4) possui
duas tensões iguais. Para que isso aconteça é necessário que o terceiro termo dentro da
raiz seja nulo.
Assumindo carga com fator de potência
constante, pode-se escrever:
Quando a tensão crítica ocorre, necessariamente o máximo carregamento ocorre.
Substituindo (3.10) em (3.9),
59
Resolvendo para
,
O máximo carregamento é estritamente positivo. Portanto, a solução positiva
será adotada e o máximo carregamento será dado por:
Logo, a tensão crítica será dada por:
Segundo as equações (3.13) e (3.14), o ponto crítico
fator de potência da carga
, da topologia da rede
depende do
e do controle de tensão
.
A Figura 3.5 mostra as curvas PV da rede para diferentes valores de fator de
potência. Cada curva indicada é para diferentes valores de
compensada (valores negativos de
e à medida que a carga é
) o máximo carregamento aumenta,
proporcionando maiores margens e mais segurança para operação do sistema de
potência.
Outras formas de compensação seria a redução do efeito indutivo da linha
transmissão pela alocação série/paralelo de capacitores ou FACTS diminuindo o
comprimento elétrico pela redução da reatância
do sistema de transmissão [10,11].
Porém, a perda de uma linha no sistema de transmissão (operação em contingência)
pode fazer com que a reatância
conforme mostrado na Figura 3.4.
aumente e diminua a capacidade de transmissão,
60
1.2
-0.40
1
Tensão na carga V2 [p.u.]
-0.20
0.0
0.8
0.20
0.40
0.6
0.4
Máximo Carregamento
0.2
0
500
1000
1500
2000
2500
Carregamento [MW]
3000
3500
Figura 3.5 Evolução do máximo carregamento para diferentes cargas (
4000
).
Longas distâncias podem dificultar o suporte de potência reativa e o controle
remoto de tensão é comprovadamente ineficiente e inadequado [10,11], a menos que
seja de forma compartilhada tal como um controle secundário de tensão. Longas
distâncias implicam necessariamente maiores perdas ativas e reativas podendo o gerador
perder controle da tensão terminal ocasionando um aumento da reatância do sistema de
transmissão pela inclusão das reatâncias do transformador e do gerador, reduzindo a
capacidade de transferência de potência. Essa situação pode ser alcançada pela atuação
combinada do OLTC e OEL, conforme descrito na seção anterior.
A forma da curva PV é influenciada pela operação do OLTC e OEL, e quando
estes equipamentos não estão sendo considerados quando deveriam ser os resultados a
respeito da estabilidade do sistema serão equivocados [26]. Particularmente, para o caso
da carga potência constante, o erro cometido é pouco ao se afirmar sobre o ponto crítico
do sistema, e este caso representa uma boa aproximação para uma primeira avaliação da
estabilidade do sistema. Porém, para a carga corrente constante, desprezar a dinâmica
do OLTC e OEL altera significativamente o ponto crítico do sistema e nesse caso a
61
instabilidade ocorreria muito depois em relação ao caso em que o OLTC e OEL estão
sendo modelados [26].
A característica da carga influencia a estabilidade de tensão. Para cargas do tipo
impedância constante, a instabilidade não ocorre, pois a característica da carga sempre
intercepta a característica da rede, tal que pela análise estática sempre existe um ponto
de operação estável. Isso pode ser provado matematicamente pela substituição de
(3.5a,b) para característica impedância constante, em (3.3) [53]. Pela análise estática,
quanto maior a sensibilidade da carga mais estável será o sistema de potência [53].
Entretanto, a dinâmica de restauração da carga pode conduzir um ponto de operação
estável para um ponto de operação instável [10]. Limitaremos a discussão a análise
estática para elucidar a importância da característica da carga.
Considere o aumento da demanda para uma carga do tipo potência constante,
conforme apresentado na Figura 3.6. Conforme a demanda aumenta os pontos de
operação estável e instável se aproximam, até atingir o ponto de máximo carregamento
a partir do qual não existe solução para o fluxo de carga, levando ao colapso de tensão.
Para a carga do tipo potência constante a fronteira com a instabilidade é dada pelo
máximo carregamento. Porém, para outros tipos de carga com diferentes sensibilidades,
o sistema de potência pode operar abaixo do ponto de máximo carregamento sem que
ocorra a instabilidade.
Considere uma carga com sensibilidade dada por
representada na
Figura 3.7. Observe que esta carga apresenta uma sensibilidade maior do que o caso da
carga potência constante, portanto espera-se que esta carga consiga atingir uma
demanda
maior. De fato, a carga opera além do ponto de máximo carregamento
atingindo uma demanda
maior. Para uma demanda maior do que aquela do ponto L, a
característica da carga não intercepta a curva PV, levando o sistema de potência ao
colapso de tensão. A maior demanda que o sistema de potência pode atender é aquela
dada tangente à curva PV, neste caso o ponto L, chamado de limite de estabilidade. Em
geral, para sensibilidades
o limite de estabilidade ocorre para uma
demanda maior do que aquela do máximo carregamento, enquanto para
não
existe limite de estabilidade, ou seja, qualquer demanda pode ser atingida sem ocorrer o
colapso de tensão [10].
62
1
0.9
Tensão na carga V2 [p.u.]
0.8
0.7
0.6
aumento da demanda z
Pmax
0.5
0.4
0.3
0.2
0.1
0
0
500
1000
1500
2000
Carregamento [MW]
2500
3000
Figura 3.6 Aumento da demanda para carga do tipo potência constante.
1
0.9
0.8
Tensão na carga V2 [p.u.]
z
0.7
0.6
L
0.5
Pmax
0.4
0.3
0.2
Limite de Estabilidade
0.1
0
0
500
1000
1500
2000
Carregamento [MW]
Figura 3.7 Limite de Estabilidade.
2500
3000
63
3.6
Análise Estática e Dinâmica
A dinâmica dos equipamentos que influenciam a estabilidade da tensão é
geralmente lenta. Sendo assim, muitos aspectos do problema poderão ser estudados
utilizando métodos estáticos, que verificam a viabilidade do ponto de equilíbrio
representado por uma condição de operação específica do sistema. As técnicas de
análise estática permitem uma rápida e simples avaliação das condições críticas do
sistema elétrico, podendo-se analisar diversos cenários. Os métodos estáticos baseiamse em análises de fluxo de carga, nas curvas PV e QV, e no cálculo de índices de
proximidade da instabilidade de tensão. As análises estáticas são muito úteis para
análise de contingências, onde diversos cenários devem ser analisados.
No entanto, os métodos estáticos não contemplam a atuação dos equipamentos
dinâmicos do sistema, como a coordenação da proteção e equipamentos de controle.
Para tal, deve-se utilizar a análise dinâmica por meio de simulações no domínio do
tempo, com maior detalhamento dos componentes presentes no sistema, o que implica
em um tempo computacional mais elevado e uma resposta fiel do comportamento
dinâmico do sistema após a ocorrência de qualquer tipo de perturbação.
Em contraste com a análise estática em que os pontos de equilíbrio da curva PV
não são dependentes do tempo, a análise dinâmica apresenta o comportamento
transitório do sistema.
Este trabalho analisa a estabilidade de tensão de longo-prazo por meio da análise
dinâmica, representando todos os componentes da rede como geradores síncronos,
gerador de indução, OLTC, OEL e etc.
3.7
Conclusões
Neste capítulo apresentaram-se conceitos básicos sobre estabilidade de tensão,
como a distinção entre os termos instabilidade de tensão e colapso de tensão. Vários
autores propuseram diferentes definições, contudo reconhecendo que ambos os
conceitos referem-se à instabilidade do sistema de potência como resultado final.
Porém, o colapso de tensão refere-se à inexistência de um ponto de operação causando a
queda progressiva e incontrolável da tensão, ao passo que a instabilidade de tensão se
refere a pontos de operação instáveis que podem conduzir ou não ao colapso de tensão.
A estabilidade de tensão é um fenômeno que depende do tipo de perturbação e da janela
64
de tempo de estudo, sendo importante reconhecer o tipo de instabilidade para poder
tomar medidas preventivas.
A viabilidade técnica-econômica de um ponto de operação, traduzido por uma
condição de operação satisfatória e estável é mensurada pela margem de estabilidade do
sistema de potência. Uma condição de operação segura e estável é traduzida por uma
margem de segurança elevada o que implica em uma grande margem de estabilidade.
A curva PV é um dos principais métodos de análise estática da estabilidade de
tensão, contudo dependendo dos controles envolvidos e do tipo de carga adotado, a
modelagem estática pode ser inadequada e as conclusões obtidas pelas curvas PV
estáticas serão errôneas. Dentre os principais responsáveis por tais conclusões
equivocadas, são o OLTC e OEL, os quais combinados produzem um efeito
depreciativo no perfil de tensão, portanto é importante considerar a dinâmica de tais
equipamentos em estudos de estabilidade de tensão, bem como o tipo de carga e a sua
dinâmica, pois a carga é um dos principais componentes para a instabilidade de tensão.
Por fim, as análises estáticas e dinâmicas devem ser usadas em conjunto para
detectar o tipo de instabilidade e tomar as ações necessárias para solucionar o problema.
65
Capítulo 4
Gerador de Indução Duplamente Excitado
4.1
Introdução
O DFIG é uma das tecnologias de aerogeradores mais utilizadas em grandes parques
eólicos pelo mundo todo. Para realizar a conexão ao sistema de potência, os operadores
do mundo todo exigem certos requisitos técnicos aos aerogeradores para garantir a
estabilidade do sistema.
Faltas nas proximidades do parque eólico drenam grandes correntes dos
aerogeradores para alimentar o curto-circuito, consequentemente correntes muito
elevadas circulam pelos conversores estáticos, podendo danifica-los facilmente. Devido
as correntes excessivas nos conversores, na ocorrência de faltas, o parque eólico era
desconectado imediatamente, ocasionando problemas de estabilidade aos sistemas
elétricos. Por este motivo, os parques eólicos foram obrigados a permanecer conectados
à rede elétrica na ocorrência de faltas, dando origem ao procedimento de ridethrough,
amplamente exigido por vários operadores de sistema no mundo todo.
O crescimento da demanda com os anos, acompanhado pela falta de reforços ao
sistema de transmissão, fez surgir novos problemas de estabilidade, dentre estes a
estabilidade de tensão; associado fortemente ao desbalanço de potência reativa. Para não
sobrecarregar a geração firme do sistema com fornecimento remoto ineficiente de
potência reativa aos grandes centros de consumo, muitos operadores de sistema exigem
que grandes parques eólicos forneçam potência reativa ao sistema quando solicitado
pelo operador.
Há poucos anos, muitos parques eólicos operavam com fator de potência
unitário para permitir a maior venda de potência ativa possível aos seus consumidores.
Entretanto, devido à operação sobrecarregada do sistema de transmissão, os parques
eólicos foram obrigados a fornecer potência reativa ao sistema de potência em
momentos de contingências conforme exigido pelo operador. Dessa forma, o DFIG
66
pode operar como compensador de potência reativa nos momentos em que a
disponibilidade de ventos é baixa, favorecendo um aumento na margem de estabilidade
de tensão.
Dentro deste cenário é importante avaliar a capacidade de fornecimento de
potência reativa por parte dos aerogeradores, pois os problemas de instabilidade de
tensão estão associados diretamente às reservas de potência reativa.
Todavia, em alguns casos, o controle de potência reativa pelo aerogerador é
impraticável. Parques eólicos offshore localizam-se dezenas de quilômetros distante da
costa do litoral. Nesse caso, para que a conexão ao sistema de transmissão atinja uma
solução de compromisso técnica-econômica, o link HVDC normalmente é a solução
preferida e o controle da tensão no ponto de conexão com a rede elétrica é feito pela
subestação conversora em terra e não pela subestação eólica localizada no mar [2].
Entretanto, este problema não será avaliado nesta tese, será suposto que o parque eólico
localiza-se em terra (onshore) próximo a rede elétrica e conectado via reatância indutiva
representativa do transformador da subestação do parque eólico.
Este capítulo estuda a capacidade de fornecimento de potência reativa por parte
do DFIG, através da curva de capacidade. Primeiramente, abordando a sua
representação para estudos em regime permanente, seguido da modelagem dinâmica
incluindo
os
controles
e
finalmente,
serão
derivados
os
limites
de
fornecimento/absorção de potência reativa através dos limites definidos nas curvas de
capacidade considerando o GSC operando com fator de potência unitário ou diferente.
4.2
Modelo do DFIG para Estudos em Regime Permanente
O modelo mais utilizado para representação do DFIG em estudos de fluxo de
carga é a barra PV, pois este tipo de aerogerador permite controle independente de
potência ativa e reativa. Na barra PV são dadas a geração de potência ativa e a tensão
terminal, enquanto a potência reativa e a fase da tensão são calculadas. A tensão é
mantida constante dentro de uma faixa de potência reativa estabelecida pela curva de
capacidade da máquina. Extrapolado o limite de injeção de reativos, a potência reativa
fornecida para a rede é fixada no máximo e a tensão terminal perde controle e torna-se
uma variável. Portanto, é importante determinar os limites de potência reativa para que
o ponto de operação não seja equivocado. O final do capítulo é dedicado ao cálculo dos
limites de potência reativa seja para a análise estática ou dinâmica.
67
Dependendo da capacidade do parque eólico, o DFIG pode ser representado em
estudos de fluxo de carga como barra PQ, na qual a máquina controla o fator de
potência. Neste caso, a potência ativa e reativa são especificadas, enquanto o módulo da
tensão terminal e sua fase são calculados.
O modo de controle do DFIG por tensão terminal ou fator de potência afeta
significativamente a estabilidade de tensão do sistema de potência.
Nesta tese estes modos de controle serão avaliados sob o foco da estabilidade de
tensão de longo-prazo.
4.3
Considerações na Modelagem para Estudos de Estabilidade
Normalmente, um sistema de potência de grande porte apresenta centenas ou
milhares de equações diferenciais não-lineares, as quais descrevem a dinâmica dos
equipamentos envolvidos. Fenômenos de curta duração (alta frequência) possuem
constantes de tempo muito baixas, da ordem de microsegundos, como é o caso de
transitórios de chaveamentos, enquanto fenômenos de longa duração (baixa frequência)
possuem constante de tempo da ordem de segundos ou dezenas de segundos, como é o
caso das dinâmicas de longo-prazo: atuação do tap do OLTC e atuação do OEL (veja
Figura 4.1).
Nesse sentido, o modelo dinâmico do equipamento deve estar adequado à janela
de tempo de observação do fenômeno a ser estudado. Modelos bastante sofisticados, em
geral associados a dinâmicas ultra-rápidas como transitórios eletromagnéticos,
envolvem passos de integração muito pequenos, necessários para que sejam capturados
os detalhes de alta frequência do fenômeno e dessa forma o tempo de computação tornase elevado mesmo para um fenômeno de curta duração e impraticável para um
fenômeno de longa duração [54].
Entretanto, modelos mais detalhados podem permitir o estudo simultâneo de
dois fenômenos com apenas uma simulação. Considere um sistema de potência
tomando carga conforme a demanda de seus consumidores. Em determinado instante,
ocorre uma falta em uma linha de transmissão. A falta é extinta pela abertura dos
disjuntores e a linha é retirada de operação. Deseja-se avaliar a estabilidade do sistema
de potência no momento que a falta é aplicada e o comportamento pós-falta
considerando a tomada de carga. Essa situação envolve estudos de estabilidade a curtoprazo e longo-prazo, pois durante a falta o sistema de excitação e o controle de tensão
68
respondem rapidamente graças as constantes de tempo da ordem de milisegundos e a
tensão se estabiliza rapidamente. Porém, após a falta a tensão pode estar mais baixa do
que o valor pré-falta, isso pode causar atuação do OLTC na tentativa de restabelecer a
tensão da carga, drenando maiores quantidades de potência reativa, podendo causar
atuação do OEL.
Porém, esse estudo simultâneo envolve passos de integração de tamanhos
bastante diferentes, fazendo com que o tempo de simulação computacional seja
excessivo e, dependendo do método de integração utilizado, uma instabilidade numérica
pode ocorrer pela incompatibilidade dos modelos usados nas diferentes janelas de
tempo estudadas [54]. Recomenda-se que o modelo adotado seja formulado e adequado
para apenas um estudo de estabilidade correspondente a uma determinada janela de
tempo de interesse.
Sobretensões de raios
Sobretensões de chaveamentos
Ressonância Subsíncrona
Estabilidade Transitória
Dinâmica de Longo Prazo
Regulação do Intercâmbio de Potência
Demanda Diária
10e-7 10e-6 10e-5 10e-4 10e-3 10e-2 10e-1
1
10e1 10e2 10e3 10e4 10e5 10e6
Escala de Tempo [s]
Figura 4.1 Janela de tempo dos fenômenos de estabilidade nos sistemas de potência [55].
Esta tese aborda a estabilidade de tensão de longo-prazo e o modelo adotado
compatível com esse estudo envolve a janela de tempo da dinâmica de longo-prazo,
conforme a Figura 4.1.
69
4.4
Representação do Gerador de Indução
Normalmente para estudos de estabilidade, o gerador é modelado em termos das
variáveis d-q oriundas da transformação de Park, por dois motivos:
A transformação de Park retira a dependência angular temporal das indutâncias
da máquina, fazendo com que a equação diferencial seja mais simples de ser
resolvida;
A transformação de Park usa dois eixos ortogonais independentes; desse modo
as componentes reais e imaginárias de qualquer fasor escrito em termos das
coordenadas d-q são independentes. Essa propriedade é interessante para
implementação do controle vetorial do DFIG, cuja estratégia do referido
controle é mostrada mais adiante.
Primeiramente é importante convencionar o sentido positivo das correntes nos
enrolamentos da máquina (pode-se convencionar também o sentido do fluxo de
potência). Para operação motora é usual considerar as correntes positivas quando estão
entrando nos enrolamentos do rotor e estator. Logo, os fluxos podem ser escritos como
[49]:
Os índices d, q, s e r denotam: o eixo direto, eixo de quadratura, variáveis do
enrolamento do estator e variáveis do enrolamento do rotor, respectivamente. Os fluxos
, as indutâncias
e as correntes
estão todos escritos em por unidade p.u. na base da
máquina. As indutâncias próprias do estator
e do rotor
são dadas por [49]:
70
sendo que
representam as indutâncias de dispersão do estator e rotor e
indutância de magnetização, todos em p.u., respectivamente.
A convenção de correntes adotada para operação geradora foi apresentada no
Capítulo 2, na qual a corrente é considerada positiva quando está saindo do estator e
positiva quando esta entrando no rotor [56]. Aproveitando a Equação (4.1) é necessário
trocar o sinal das correntes do estator, logo
O campo magnético é o acoplamento entre o rotor e o estator. Tensões são
induzidas no estator/rotor pelo movimento relativo entre o campo magnético girante do
estator e o campo girante do rotor, segundo a lei de Faraday. A tensão terminal será
composta de uma queda de tensão devido à resistência do enrolamento, uma
componente de tensão de velocidade e uma componente de tensão induzida sem
movimento, simplesmente pela variação temporal da corrente alternada nos
enrolamentos. Logo, as tensões nos terminais do estator/rotor serão dadas por [49]:
onde
e
são a tensão e a resistência, respectivamente, do estator/rotor de acordo com
o subscrito,
é a velocidade angular síncrona e
é o escorregamento. Todas as
Equações (4.4) estão em p.u. e a velocidade angular síncrona
base do sistema, portanto
para a
71
onde,
Para o SCIG, as tensões do rotor são iguais a zero, nas equações (4.5c,d), porque
o rotor encontra-se curto-circuitado, enquanto que para o DFIG estas tensões são
diferentes de zero, pois os conversores realizam o controle pelo rotor.
Os transitórios do estator (
e
) nas equações (4.5a,b),
normalmente são de natureza muito mais rápida do que os transitórios do rotor
(
e
) nas equações (4.5c,d) e de acordo com as considerações feitas
na seção anterior, os transitórios do estator podem ser desprezados, reduzindo o modelo
de quarta ordem para um modelo de segunda ordem, chamado de modelo de ordem
reduzida [2,49,54,57].
A principal diferença entre os modelos detalhado e reduzido está nos transitórios
seguidos de faltas (grandes perturbações). O transitório do modelo detalhado apresenta
correntes com maiores magnitudes em relação ao modelo reduzido [57]. Essas correntes
elevadas podem causar atuação da proteção crowbar do aerogerador, retirando a
máquina de operação. Nesse caso, a atuação da proteção pode comprometer, a curtoprazo, a estabilidade transitória do sistema.
A estabilidade de longo-prazo, conforme visto no Capítulo 3 está associada à
interação de equipamentos de dinâmica lenta provocado por sucessivos incrementos da
demanda, causando pequenos distúrbios no sistema de potência, incapazes de provocar
súbitas correntes nos enrolamentos do estator. Essa premissa exclui o modelo detalhado
e adota o modelo reduzido. O modelo detalhado é fortemente indicado para estudos de
ridethrough e de estabilidade transitória, as quais envolvem grandes perturbações [57].
72
Portanto, desprezando-se os transitórios do estator e manipulando as equações
(4.3) e (4.5) convenientemente, define-se o modelo de ordem reduzida, por
onde:
Sendo que
e
e
são as reatâncias de circuito aberto e transitória, respectivamente,
são as componentes de eixo direto e quadratura da tensão transitória interna
, respectivamente, e
é a constante de tempo de circuito aberto dada
em segundos. Nesta tese, os conversores são modelados como fontes de tensão
controladas, por este motivo o modelo de ordem reduzida considera as componentes
e
para o DFIG, mas existem modelos que consideram os conversores como fontes
de corrente controladas [58], reduzindo as malhas de controle e facilitando a sintonia.
Esta abordagem de fontes de corrente controlada simplifica as equações e reduz o tempo
de computação e os resultados finais são muito próximos em relação ao modelo fonte de
tensão controlada [30]. Contudo, a abordagem de conversores modelados como fontes
de tensão foi adotada porque este modelo encontra-se implementado no ANATEM [56].
A Figura 4.2 apresenta o diagrama de blocos para as equações (4.6c,d). A
transformação de eixos se faz necessária porque as referências angulares para o sistema
73
de potência e o controle dos conversores serem diferentes. Os subscritos
se ao eixo do sistema de potência, enquanto os subscritos
referem-
ao eixo do controle
vetorial. Para representar o SCIG, basta anular as tensões no rotor e desprezar a
transformação de eixos [56].
A interface com o modelo de ordem reduzida é dada pelas equações de potência
ativa
reativa
e reativa
efetuado pelo rotor e torque eletromagnético
I Rr
I dr
I qr
trocadas com a rede pelo estator, o controle de potência ativa
Transformação
de eixos
1
L rr
I Rs
Rr
Lm
X X'
e
, dados por [49]:
L rr
Lm
1
1 sT0'
'Rr
s
e I'
s T 0'
Vdr
Vqr
Transformação
de eixos
VRr
Lm
L rr
VIr
Lm
L rr
slip
slip
s T 0'
IIs
I Ir
X X'
Lm
1
L rr
Ir
1
1 sT0'
'Ir
s
e R'
L rr
Lm
Figura 4.2 Modelo dinâmico de ordem reduzida para o DFIG [56].
Mais adiante, é mostrado que a potência ativa do rotor
estator
e a potência ativa do
se relacionam pelo escorregamento , sendo que a capacidade do conversor é
74
determinada pelo escorregamento máximo
. As equações de interface (4.8) são
muito úteis para equacionar a técnica de controle vetorial.
4.5
Representação da Turbina Eólica e Controle de Passo
Para estudos de estabilidade de tensão, a frequência não é um problema, assim
como o sincronismo [49]. Nestes estudos a frequência do sistema não contém
harmônicas. Entretanto, a carga é dependente da frequência e a operação fora da
frequência nominal pode danificar o equipamento alimentado, forçando atuação da
proteção, levando a perda de carga para o sistema de potência.
Nas máquinas síncronas quando a rotação da máquina primária diminui, a
frequência gerada diminui proporcionalmente e a tensão gerada é dependente da
frequência, portanto uma queda na frequência do sistema provoca quedas na tensão do
sistema de potência. Esse efeito pode, eventualmente, conduzir o sistema de potência a
uma instabilidade de tensão. Entretanto, essa instabilidade nada se relaciona ao controle
de potência reativa e sim ao controle primário carga-frequência. Nesse caso, a
instabilidade de tensão ocorreu devido a um problema de instabilidade de frequência.
A instabilidade de frequência está fortemente associada ao controle primário
carga-frequência, necessitando de uma modelagem adequada para a máquina primária, a
qual pode envolver dinâmicas lentas. Turbinas eólicas apresentam dinâmica lenta,
envolvendo constantes de tempo da ordem de dezenas de segundos [17]. Essa dinâmica
lenta está relacionada aos transitórios da turbina pelas mudanças de velocidade dos
ventos e do ângulo de passo das pás até a turbina atingir o regime permanente [17].
Porém, a modelagem detalhada da turbina eólica envolvendo os efeitos transitórios não
é necessária para a estabilidade de tensão de longo prazo, pois não envolve diretamente
o controle de potência reativa da máquina.
As curvas
usadas para calcular a potência extraída da turbina eólica
considera operação em regime permanente e não apresentam qualquer dinâmica
referente à passagem de um ponto de operação para outro [17]. Isso significa que a
turbina eólica atinge o regime permanente instantaneamente quando a velocidade do
vento muda subitamente. A literatura carece de análises detalhadas para a estabilidade
de tensão de longo-prazo considerando os transitórios envolvidos na dinâmica lenta da
turbina eólica.
75
Nesta tese, a turbina eólica é modelada usando as curvas
segundo a
equação (2.2) apresentada no Capítulo 2. A dinâmica da máquina primária foi
desconsiderada e a potência mecânica fornecida aos geradores síncronos é considerada
constante. O controle automático da geração não está representado e todo aumento da
demanda é compartilhado exclusivamente entre o aerogerador e o barramento infinito
da rede elétrica sob estudo.
As curvas
podem ser obtidas analiticamente ou através de tabelas.
Analiticamente, o coeficiente de potência
pode ser expresso por [56]:
onde:
Os coeficientes
podem ser constantes ou variáveis. Muitos autores,
dependendo da dimensão da turbina, adotam diferentes valores para as constantes [59],
mas nesta tese os coeficientes
e
são constantes, enquanto o restante dos
coeficientes são funções tabeladas do ângulo de passo
curvas
[56]. A Figura 4.3 mostra as
obtidas usando as equações (4.9) e (4.10), considerando os
coeficientes
e
constantes, enquanto o restante dos coeficientes como variáveis do
ângulo de passo .
Nestas curvas, quanto menor
maior será
aerogerador é construída baseada na curva
. A curva de potência do
da turbina eólica, a qual depende
do perfil aerodinâmico, que confere sustentação e arrasto, e das dimensões das pás. A
curva de potência é feita considerando o melhor aproveitamento energético possível, por
este motivo
. Pela Figura 4.3 observa-se para
o maior valor de
.
Segundo a estratégia de controle de passo, geralmente a turbina eólica maximiza a
extração de potência eólica para velocidades abaixo da nominal [60], na qual o
controlador rastreia o valor ótimo da velocidade específica de ponta de pá
produz o maior coeficiente de potência
o qual
conforme a Figura 4.3. Fixando-se a
velocidade do vento, a potência mecânica é calculada segundo (2.2) variando-se ,
obtendo-se uma faixa de velocidade da turbina
para cada
segundo (2.3). Dessa
76
forma, para cada velocidade de vento obtém-se valores máximos de potência mecânica,
conforme a Figura 4.4. A curva ótima indicada na figura é usada para construir a curva
de potência do aerogerador.
0.48
1.0
0.46
2.0
0.44
CP - Coefciente de Potência
0.0
3.0
0.42
4.0
0.4
0.38
5.0
0.36
0.34
6.0
0.32
0.3
6
7
8
9
10
Tip Speed Ratio - TSR
Figura 4.3 Curvas
.
10 m/s
10,5 m/s
900
850
800
700
12
Curva Ótima
600
Potência [kW]
11
9 m/s
500
8 m/s
400
300
7 m/s
200
6 m/s
5 m/s
100
0
0
10
20
30
40
50
Velocidade da Turbina [rpm]
60
Figura 4.4 Potência mecânica para várias velocidades de vento e
70
.
77
A estratégia de controle de passo empregada nesta tese consiste no
aproveitamento ótimo do recurso eólico e reduzir a carga aerodinâmica sobre as pás
quando a potência mecânica extrapolar a potência nominal, normalmente adotada pelos
produtores eólicos. Nas altas velocidades de vento, quando a potência mecânica
ultrapassar a potência nominal, o controle de passo atua no sentido de diminuir a
potência mecânica para isso reduzindo
Para alcançar esse objetivo, o controlador
aumenta o ângulo de passo de referência
. A Figura 4.5 mostra o diagrama de
blocos da malha de controle de passo.
Pacel
Pt
Tacel
1
2Hs
r
PT
Caixa de
Engrenagens
V
M
Turbina
Controle de Passo
max &d / dtmax
ref
1
1 sTP
P+I
r max
min &d / dtmin
Figura 4.5 Malha de controle de passo da turbina eólica [56].
A velocidade
é determinada pela carga mecânica que a turbina é
submetida, pela emissão de ruído acústico e outros objetivos de projeto [60] que são
refletidos na curva de referência
velocidade do rotor
(
(específica de cada fabricante). Se a
esta abaixo de
, o erro de velocidade é menor que zero
), provocando a redução do ângulo de referência
para zero entrando em
operação otimizada [11]. Isso significa que a velocidade do vento está abaixo da
velocidade nominal e o aproveitamento energético torna-se máximo pela elevação do
coeficiente de potência para
e o ângulo de passo para zero. Contudo, se a
78
velocidade do vento ultrapassa a velocidade nominal,
e o ângulo de passo
aumenta reduzindo o coeficiente de potência, mas mantendo a potência ativa constante
no valor máximo estabelecido pela curva de potência. Nessa situação a turbina não
trabalha de forma otimizada e o controle de passo atua para reduzir a carga
aerodinâmica sobre as pás. Para evitar a fadiga das pás durante as mudanças do ângulo
de passo, o controle é limitado por uma taxa de variação máxima e mínima do ângulo de
passo [59,60]. Em alguns esquemas de controle de passo, o sinal de entrada para o
controlador é composto por parcelas referente ao erro de velocidade
potência
e erro de
[17].
Para compreender melhor a operação do DFIG, acompanhe a Figura 4.6. Esta
figura representa o sistema de controle do DFIG englobando, genericamente, todas as
malhas de controle. Conhecida a demanda
através da curva
. A velocidade de referência
qual produz a tensão do rotor
demanda
, obtém-se a velocidade de referência
é controlada pelo RSC, o
com componentes ativas e reativas para atender a
e a tensão da barra terminal
ou fator de potência do aerogerador,
conforme especificado.
PT
Turbina
Eólica
Gerador de
Indução com
Rotor Bobinado
r
Controle de
passo
r
r max
Pt
ref
Pref Wref
Conversor
ligado ao rotor
Pt
Sistema de
Potência
Qc
Vr
Conversor
ligado ao estator
V ref
V
V
Barra
Terminal
Vt
Figura 4.6 Sistema de controle do DFIG.
Quando a tensão terminal cai abaixo de um valor limiar, o GSC entra em
operação fornecendo potência reativa a barra terminal para restaurar a tensão, podendo
ser desligado quando a tensão terminal atingir um valor adequado. O suporte de
potência reativa por parte do GSC é bastante explorado na literatura para procedimentos
de ridethrough, mas em regime permanente opera normalmente sob fator de potência
79
unitário, ou seja, sem fornecer suporte de potência reativa. A contribuição de potência
reativa do GSC para evitar o colapso de tensão é imprescindível, constituindo uma das
principais contribuições desta tese.
4.6
Representação do Sistema Mecânico
O sistema mecânico é formado pelo acoplamento indireto dos eixos do gerador e
da turbina eólica por uma caixa de engrenagem. Esse acoplamento indireto se deve as
diferentes velocidades no eixo da turbina (baixa velocidade) e eixo do gerador (alta
velocidade).
A caixa de engrenagem caracteriza um acoplamento fraco entre o eixo do
gerador e da turbina, principalmente nas modernas turbinas, com relação de transmissão
da ordem 1:100 expondo muito mais a fragilidade do eixo [17]. O eixo pode ser
considerado rígido, quando a sua rigidez
1 p.u. [59]. Para turbinas eólicas a rigidez
é superior a 3 p.u. e suave quando inferior a
encontra-se na faixa 0,15 – 0,40 , o que
representa uma baixa rigidez [17].
Quando a rigidez do eixo é baixa, o desbalanço entre o torque de carga
torque mecânico
e
fornecido pela turbina provoca a torção no eixo, causando
oscilações. Nesse caso, o sistema mecânico deve ser representado por um modelo de
duas massas, conforme a Figura 4.7. A rotação das massas (turbina e gerador) causa um
deslocamento angular
[radianos] provocando torção no eixo. As equações do
movimento para o modelo de duas massas em p.u. é dada por [59]:
sendo
a velocidade síncrona do sistema em rad/s.
A Figura 4.8 apresenta o diagrama de blocos do modelo duas massas referente
as equações (4.11a,b,c).
80
Em regime permanente não existe desbalanço de torque, ou seja,
.
Porém, uma falta pode desencadear um súbito desbalanço de torque, podendo ocorrer
ressonância do eixo com algum modo de oscilação mal amortecido do sistema, caso o
eixo seja de baixa rigidez.
g
t
Tm
H t k s Te
Hg
Rotor do Gerador
Rotor da Turbina
Figura 4.7 Sistema mecânico representado por duas massas.
PT
Tm
M
k s
r
Pt
Te
1
2H t s
ks
s
1
2H g s
M
r
Figura 4.8 Diagrama de blocos para o modelo duas massas do eixo mecânico.
A frequência de oscilações no sistema de eixo dos geradores DFIG se encontra
no intervalo 1,44 – 4,55 Hz [61], relativamente próximo da frequência natural de
81
oscilações eletromecânicas dos geradores síncronos convencionais (0,2 – 2,5 Hz) [49],
logo, existe a possibilidade de interação adversa entre parques eólicos e geradores
síncronos por modos de oscilação mal amortecidos. A frequência de ressonância natural
do sistema mecânico será dada por [17]:
Gautam [62] efetuou análise modal para aerogeradores DFIG, entretanto usou
uma representação equivalente de máquina síncrona para representar o aerogerador. Mei
[31] estudou análise modal para aerogeradores DFIG levando em consideração o
modelo do gerador de indução e confirmou que as interações adversas do eixo mecânico
com o sistema de potência só podem ser percebidas pela representação do modelo de
duas massas, a qual devido a baixa rigidez do eixo é o fator principal das oscilações.
Hughes [63] propôs um estabilizador para amortecer esses modos mal amortecidos.
Contudo, a exploração desses modos mal amortecidos está fora do escopo dessa tese.
Alguns autores sugerem uma modelagem considerando duas massas,
especialmente para o caso do SCIG [17,60], pois além da baixa rigidez do eixo este tipo
de aerogerador é desprovido de controle. Dessa forma, as oscilações no eixo podem
conduzir a flutuações no torque de carga
comprometendo a qualidade da energia e a
estabilidade do sistema de potência. Contudo, essas oscilações mal amortecidas de baixa
frequência não fazem parte dos estudos de estabilidade de tensão de longo-prazo [10].
Por este motivo, apesar do fraco acoplamento no SCIG devido a caixa de engrenagens,
o sistema mecânico será representado pelo modelo massa global.
Pela Figura 4.5, o sistema mecânico do DFIG é representado pelo modelo
massa concentrada para o conjunto turbina-gerador (constante de inércia
).
Essa representação supõe que o eixo que conecta as duas massas seja de alta rigidez,
desprezando a torção no eixo. Apesar da baixa rigidez do eixo, o controle independente
de potência ativa e reativa proporcionado pelo RSC desacopla a velocidade do rotor da
frequência do sistema de potência, não refletindo a fragilidade do eixo no torque de
carga, por este motivo o modelo massa concentrada pode ser adotado para o DFIG [60].
Considerando o modelo massa concentrada, a equação de oscilação em p.u., a
qual completa o conjunto de equações da máquina assíncrona, será dada por:
82
sendo que
é um fator de amortecimento, normalmente muito baixo o qual pode ser
desprezado. Essa suposição conservadora enobrece a robustez do controle nos
resultados. Nas equações (4.11) o fator de amortecimento foi desprezado.
Em relação ao DFIG, o modelo de duas massas é fortemente indicado para
estudos de estabilidade transitória, pois a falta aplicada pode provocar atuação do
crowbar, bloqueando o RSC. Nesse caso, o DFIG perde controlabilidade e comporta-se
como um SCIG, uma vez que o circuito do rotor foi curto-circuitado pela atuação do
crowbar.
A estabilidade de tensão de longo-prazo avaliada nesta tese é experimentada por
pequenos incrementos da carga as quais não provocam atuação do crowbar, pois este
tipo de proteção é para curto-circuitos. Por este motivo, adotou-se o modelo massa
concentrada para o DFIG.
4.7
Representação dos Conversores e do Link CC
A Figura 4.9 exibe o modelo adotado para os conversores e o link CC, onde
representa a reatância do transformador de acoplamento (Figura 2.10). Para o sistema
de potência, os conversores são vistos como fontes de tensão controladas, enquanto que
para o elo CC como fontes de correntes controladas. O link CC e os conversores podem
ser vistos como um conversor back-to-back com modulação PWM seno-triangular e
fluxo bi-direcional de potência compostos por pontes trifásicas para cada conversor
[64].
Rotor
Vr
Vs
I2
I1
Estator
Xt
Sistema CC
m2
2
ICC 2
IC
I CC1
VC
ET 2
RSC (C2)
m1
ET1
GSC (C1)
Figura 4.9 Conversores e link CC.
1
83
Assumindo uma fonte CC ideal e modulação PWM ideal (índice de modulação
em frequência infinito), a componente fundamental da tensão de linha (valor p.u.) e a
tensão CC (valor p.u.) podem ser relacionadas uma com a outra como segue [65]:
onde cada conversor
possui módulo
e fase
diretamente proporcional ao fator de modulação
controláveis. O módulo
é
, o qual varia entre 0 e 1 supondo
que não ocorra saturação na saída [65], e a tensão no capacitor
. Multiplicando-se
ambos os lados da equação (4.14) por bases convenientes e racionalizando o
denominador,
Logo, a tensão em cada conversor
será dada por [64]:
onde:
sendo,
: relação de transformação dos transformadores
: número de conversores conectados em pontes trifásicas
: fator de forma da onda gerada
: tensão base do sistema CC [kV]
: tensão base nos terminais do conversor
[kV]
: tensão base no primário do transformador do conversor
: tensão base no secundário do transformador do conversor
[kV]
[kV]
84
Para o rotor não existe transformador ligando o RSC ao enrolamento do rotor e
ambos os conversores empregam uma ponte trifásica. O transformador opera com
relação de transformação nominal casando com as tensões do estator e do conversor,
para o caso do GSC. Logo, a constante
O controle do fator de modulação
simplifica-se para,
é realizado por modulação PWM seno-
triangular, na qual a referência é uma portadora triangular e o sinal modulante uma
senóide de baixa frequência, neste caso a tensão terminal. O conversor operando na
região linear funciona como um amplificador linear para a componente fundamental do
sinal modulado [65]. Para o caso de uma modulação PWM real, o conteúdo harmônico
da tensão apresenta altas frequências e pode ser facilmente eliminado por pequenos
filtros CA [66]. O fator de modulação pode ser calculado como:
onde
e
são as componentes da fonte de tensão controlada
qual representa o conversor
o
para o lado CA do sistema de potência.
e
são as
amplitudes das tensões do sinal modulante e portadora, respectivamente.
Os sinais
e
são as saídas das malhas de controle do conversor , o qual
pode ter diferentes propósitos de controle. O GSC controla a tensão
reativa
e a potência
fornecida pelo conversor, caso esteja operando com fator de potência
diferente do unitário. O RSC controla a potência ativa
e reativa
do estator
fornecida pela máquina.
Dependendo do propósito de controle, o cálculo da fase
será diferente, pois
depende da orientação do controle vetorial. Por exemplo, considere a estratégia de
controle do GSC, conforme se apresenta na Figura 4.10. O controle é realizado pelo
eixo d-q e a tensão terminal
(tensão do estator) encontra-se alinhada com o eixo q. O
eixo Re-Im representa a referência do sistema de potência, portanto a fase
medida partindo desta referência, conforme indicado na Figura 4.10. Logo,
deve ser
85
onde
é a fase interna dada por:
Im
q
E T 1
Vs
d
Vq1
Figura 4.10 Cálculo de
As correntes CC
conversores
i1 V d 1
1 1
Re
para estratégia de controle do GSC.
podem ser calculadas a partir das correntes CA dos
admitindo que não existe perda nos conversores. Pelos conversores
ocorre somente fluxo de potência ativa e admitindo que não existem perdas, a potência
no link CC
será igual a potência ativa do lado CA do conversor
. Portanto,
Multiplicando ambos os lados de (4.22) por bases convenientes e reescrevendo
as potências em função de tensão e corrente, obtém-se
Substituindo (4.16) em (4.23),
86
Isolando a corrente
Finalmente,
onde [14]:
a constante
.
é usada para as correntes e depende dos mesmos fatores que a constante
e
são as bases de potência do DFIG e do link CC, respectivamente.
A dinâmica do capacitor pode ser modelada em termos das correntes
potências
e
ou das
que atravessam o elo CC. Para facilitar a modelagem, sem perda de
resultados, desprezaram-se as perdas nos conversores, enrolamentos do rotor, estator e
transformador de acoplamento. Logo, a energia armazenada no capacitor será:
Diferenciando,
Logo, a dinâmica do capacitor será representada pela equação diferencial:
87
Portanto, a tensão no link CC é modificada de acordo com a diferença de
potência entre o conversor do lado do estator
que o link CC esteja estável, a tensão
e do conversor do lado do rotor
. Para
deve permanecer constante independentemente
do fluxo de potência que o atravessa. A oscilação da tensão do capacitor pode provocar
o desligamento da unidade e a perda de uma grande geração pode comprometer a
estabilidade do sistema de potência.
4.8
Estratégia de Controle para o GSC
O principal objetivo do controle do GSC é manter a tensão do link CC constante,
independentemente da direção e magnitude do fluxo de potência que o atravessa.
Opcionalmente, o conversor pode fornecer potência reativa para controlar a tensão
terminal caso esta fique abaixo de um desejado limiar. É mostrado que o suporte de
potência reativa pelo conversor pode evitar a instabilidade e melhorar o perfil de tensão
nas barras, especialmente quando o controle atua precocemente.
Considere o sentido do fluxo de corrente sobre o GSC dado pela Figura 4.9. As
equações, em p.u., que relacionam a tensão do conversor com a tensão do estator em
coordenadas d-q são dadas por [67]:
onde
e
e
são as componentes da tensão do conversor GSC
são as componentes da corrente do conversor GSC
,
,
e
são a
resistência e reatância do transformador de acoplamento, respectivamente.
Desprezando a resistência do transformador de acoplamento
do estator, obtém-se:
e os transitórios
88
Segundo a estratégia de controle vetorial da Figura 4.10, a tensão terminal
(tensão do estator)
está alinhada com o eixo q. Logo,
e
Substituindo as condições de contorno (4.34) nas equações (4.33a,b), obtém-se:
As potências ativa e reativa injetadas pelo conversor são dadas por:
As potências ativa e reativa injetadas na rede elétrica pelo conversor são:
Aplicando as condições de contorno (4.34) nas equações (4.37a,b), obtém-se:
Substituindo as equações (4.35a,b) nas equações (4.36a):
89
Observe que (4.39a) é idêntica a (4.38a). De fato, a resistência do transformador
de acoplamento foi desprezada, portanto não existem perdas na transmissão de potência
ativa do GSC até o estator.
Substituindo as equações (4.35a,b) nas equações (4.36b):
Substituindo (4.38b) e observando que
, chega-se a:
Portanto, a potência reativa transmitida pelo GSC não é a mesma que chega ao
estator devido às perdas reativas no transformador de acoplamento.
Pela equação (4.31) percebe-se que a tensão do link CC,
, pode ser controlada
pela potência ativa,
, e consequentemente pela componente
pela componente
conforme (4.35a). Consequentemente, a potência reativa entregue
ao estator,
componente
, pode ser controlada pela componente
conforme (4.39a), ou
conforme (4.39b), ou pela
conforme (4.35b). Essas conclusões conduzem as malhas de controle
do GSC para a tensão do link CC e o suporte de potência reativa dadas na Figura 4.11.
Os limites de tensão presentes nas malhas de controle podem ser calculados
pelas equações (4.35a,b) como segue:
90
É necessário definir as correntes máximas e mínimas para estabelecer os limites
superior e inferior. O módulo da corrente
do conversor GSC será dada por:
Logo, para que uma corrente esteja limitada é necessário que a equação (4.41)
seja satisfeita, a qual representa um semicírculo de raio igual
máxima corrente
centrado na origem. A
que o conversor pode suportar continuamente sem danifica-lo
será dada pela sua corrente nominal.
Isolando
,
Logo,
Consequentemente,
Substituindo as equações (4.44) nas equações (4.40), resulta:
91
VC
V C ref
Vd1max
P+I
Vd 1min
(a) Malha de controle da tensão
Vq1max
Vd1max
Vd 1
Q ref
Vq1max
V q1
P+I
Vd 1min
do link CC.
QC
Vq1min
Vq1min
(b) Malha de controle de potência reativa.
Figura 4.11 Malhas de controle para o GSC [56].
Frequentemente, o GSC é operado com fator de potência unitário, ou seja, neste
modo de controle o conversor não fornece potência reativa para a rede elétrica, pois a
potência ativa, normalmente, é única parcela de energia que pode ser vendida , devido à
falta de incentivos financeiros para venda de potência reativa . Porém, um estudo demonstra
que o fornecimento de potência reativa por aerogeradores pode ser bastante
recompensado financeiramente pelo parque eólico, especialmente nos casos em que o
erro de previsão cometido pelo operador de sistema é maior do que 0,5 p.u. para
despacho de geração eólica, pois além da perda do custo de oportunidade, paga-se pela
geração de potência reativa com grandes reservas [40].
A análise de investimentos revela que a potência reativa fornecida por
aerogeradores é mais barata do que a de outros equipamentos convencionais [51]. O
fornecimento de potência reativa, por aerogeradores, para controle de tensão é uma
alternativa suplementar economicamente atrativa, pois reduz as perdas e o
congestionamento do sistema de transmissão, bem como maior suporte ao sistema no
caso de faltas. Na Europa, Alemanha e Espanha são alguns dos países que incentivam
financeiramente a venda de potência reativa [51]. Portanto, inevitavelmente o GSC
deverá fornecer potência reativa ao sistema, seja por questões de estabilidade do sistema
elétrico, como por incentivos financeiros ao proprietário do parque eólico.
Na Alemanha, dependendo do porte da geração eólica, o proprietário deve
compulsoriamente fornecer potência reativa para a rede no caso de faltas, segundo
curvas de ridethrough do operador de sistema. As metas exigidas pelo operador de
sistema, muitas das vezes rígidas por questões de segurança e estabilidade, faz com que
os conversores de eletrônica de potência fornecidos pelos fabricantes sejam
dimensionados acima da capacidade do gerador, para o caso do FRC [51]. O custo do
92
conversor do FRC para fornecer somente potência ativa nominal fica em torno de 1,5%
do custo do investimento total do parque eólico. Contudo, um sobredimensionamento de
50% eleva para 2,25% do custo total do parque eólico, porém com reserva de potência
reativa de 0,65 p.u. em condições nominais de operação [40]. Logo, o custo do
sobredimensionamento para o DFIG será inferior ao do FRC, devido a menor
capacidade dos conversores.
Basicamente, o controle da tensão terminal é feito pelo RSC, pois este conversor
controla a potência reativa pelo estator, a qual representa a maior parcela de potência
reativa injetada para a rede. Em alguns casos, este controle pode ser feito,
prioritariamente, pelo GSC, enquanto que o RSC atua de maneira complementar [38].
Entretanto, devido à baixa capacidade do GSC, este controle pode rapidamente perder
controlabilidade, por este motivo, nesta tese, o RSC foi escolhido para o controle
prioritário, enquanto que o GSC atua de maneira complementar.
Quando ambos os conversores (RSC e GSC) participam do controle de tensão,
deve haver alguma estratégia de coordenação para evitar correntes de circulação pelos
conversores. Considere que o controle é realizado pelo conversor GSC. Devido à baixa
capacidade deste conversor, pode acontecer da tensão terminal perder controlabilidade e
seguidamente o conversor RSC assumir o controle da tensão, forçando o conversor GSC
a consumir grandes quantidades de potência reativa. Para evitar esta situação, um dos
conversores deve ser controlado por estatismo de tensão [38].
O controle de tensão terminal pela potência reativa do DFIG pode ser feito de
várias maneiras. Por exemplo, o GSC pode ser o conversor prioritário enquanto o RSC
atua complementando-o quando este chega ao seu limite. A demanda de potência
reativa pode ser repartida entre os conversores de maneira proporcional ao fluxo de
potência reativa pelo estator/rotor. Por exemplo, o RSC comanda
reativa total, enquanto o GSC se responsabiliza por
da potência
[38]. Em contrapartida, o RSC
pode ser o prioritário e o GSC assume o comando quando este é bloqueado pelo
crowbar [17].
Nesta tese são apresentados os casos em que o GSC opera tanto com fator de
potência unitário quanto com valores diferentes do unitário, segundo a estratégia de
controle coordenado. Neste caso, o RSC é o conversor principal e o GSC o conversor
complementar. Quando a tensão terminal está abaixo de 0,9 p.u., o GSC injeta potência
reativa para a barra terminal até a tensão terminal se recuperar. É mostrado no capítulo
93
de resultados que esse suporte de potência reativa pelo GSC age como último recurso
para a manutenção da estabilidade do sistema de potência.
4.9
Estratégia de Controle para o RSC
O objetivo do conversor ligado ao rotor é controlar a potência ativa do estator e a
tensão terminal/fator de potência da máquina. A potência ativa é controlada pela
velocidade do rotor
através da curva de referência
, específica de cada
fabricante [60]. Dependendo da velocidade do vento, o controle de passo pode atuar e
nesse caso o controlador rastreia a potência nominal. A potência reativa é controlada de
forma a manter constante um fator de potência especificado ou a tensão terminal. Será
demonstrado que o controle do fator de potência é mais prejudicial para a estabilidade
de tensão do que o controle da tensão terminal.
Esse objetivo é alcançado através do controle vetorial (ou controle de campo
orientado) [2], alinhando-se o fluxo do estator
alinhando a tensão do estator
com o eixo d, consequentemente,
(tensão terminal) com o eixo q, conforme a Figura
4.12.
Im
q
Vs
Vq 2
E T 2
s
i2
d
Vd 2
2 2
Re
Figura 4.12 Estratégia de controle do RSC.
Segundo a estratégia adotada representada pela Figura 4.12, tem-se:
Retomando as equações de interface (4.8b,c) para a potência ativa
e aplicando as condições de contorno (4.46), obtém-se
e reativa
94
Pelo fato das componentes
e
serem ortogonais, as equações (4.47)
justificam o desacoplamento das malhas de controle de potência ativa e reativa pelas
componentes
e
, respectivamente. Entretanto, como o controle é realizado pelo
RSC é conveniente expressar a potência ativa e reativa em função das componentes
e
pertencentes ao rotor.
Aplicando as condições de contorno (4.46) as equações de enlace de fluxo do
estator (4.3a,b), obtém-se
Isolando
pela equação (4.48b),
A componente
pode ser obtida pela equação (4.48a),
Aplicando as condições de contorno (4.46) às equações de tensão no estator
(4.5a,b) e desprezando-se as resistências,
Substituindo (4.51) em (4.50),
95
Substituindo as equações (4.49) e (4.52) nas equações da potência ativa e reativa
(4.47a,b) e considerando
p.u.
Segundo as equações (4.30), a potência ativa
de controle mais externo pelo torque eletromagnético
e mais internamente pela componente
controlada pela potência reativa
pode ser controlada por um laço
através da velocidade do rotor
, enquanto a tensão terminal
e mais internamente pela componente
é
, conforme
a Figura 4.13 [56]. Nesta figura, o índice 2 refere-se ao conversor 2 (RSC), e todas as
quantidades referidas ao rotor pelo índice r podem também ser referidas pelo índice 2,
pois a corrente do rotor é a mesma que circula pelo conversor 2.
r
Temax
ref
I q 2max
Ps
Teref Pref
P+I
Temin
P+I
Pmax & dP / dt max
Temax
Po r d
Pmin & dP / dt min
Temin
Vq 2max
I q 2max
Iq2ref
I q 2min I q 2min
1
1 sTP
Iq2
Vq 2max
Vq 2
P+I
Vq2min
Vq2min
(a) Malha de controle de potência ativa/velocidade do rotor.
96
Qs
Qs max Q
s max
V ref
Vt
P+I
Qord
I d 2 max
I d 2 ref
Q s m in Q s m in
P+I
I d 2 min
Vd 2max
Id 2
I d 2 max
Vd 2max
Vd 2
P+I
Vd 2min Vd 2min
I d 2 min
(b) Malha de controle da tensão terminal/fator de potência.
Figura 4.13 Malhas de controle de potência ativa e reativa para o DFIG [56].
Pela malha de controle de velocidade/potência ativa o erro de velocidade é
processado por um controlador PI para produzir o torque de referência
, o qual
serve de entrada para o mecanismo de controle de potência, produzindo o sinal de
referência de potência
. O erro de potência serve ao controlador PI para produzir
. Esta referência é comparada com o valor medido
o sinal
e o erro serve para produzir
que representa a componente q da tensão do conversor 2
.
Analogamente, pela malha de controle da tensão terminal, o erro de tensão serve
para produzir a referência de potência reativa
referência
conversor 2
e finalmente o sinal
, a qual por sua vez produz a
que representa a componente d da tensão do
.
Alguns dos limites impostos nas malhas de controle de potência ativa e reativa
são dependentes das condições de vento, portanto, variáveis com o tempo. Por exemplo,
à medida que a velocidade do vento aumenta, a potência ativa tende a aumentar
rapidamente e as reservas de potência reativa tendem a diminuir, ou seja, o limite de
potência reativa pelo estator
deve diminuir com aumento da velocidade do vento,
e consequentemente a potência reativa injetada pela máquina.
Considerar os limites fixos com a variação do vento é uma hipótese muito
otimista do ponto de vista da estabilidade de longo-prazo, porém para a estabilidade de
curto-prazo, essa simplificação é válida sem perda de resultados.
Esta tese considera os limites apresentados nas malhas de controle de potência
ativa e reativa variáveis com o vento e a seção seguinte apresenta em detalhes o cálculo
de todos esses limites.
A avaliação da estabilidade de tensão de longo-prazo considerando limites
variáveis é uma das principais contribuições desta tese.
97
4.10
Cálculo dos Limites dos Conversores e Curva de Capacidade [35]
O modelo do T do gerador de indução de rotor bobinado pode ser representado
por um quadripolo para investigar a influência da corrente do estator, corrente do rotor e
da tensão do rotor na capacidade de potência reativa.
Vs
Is
Zs
Zm
Zr
Ir
Vr
s
Figura 4.14: Quadripolo representativo do gerador de indução.
As equações seguintes formuladas com base no quadripolo da Figura 4.14 são
importantes para desenvolverem as relações de potência aparente do estator como
função das variáveis do rotor.
As matrizes [Y], [G] e [B] são as matrizes admitância, condutância e
susceptância, respectivamente. Essas matrizes foram derivadas da matriz impedância
[Z] dada por:
98
onde
Para um sistema qualquer, genericamente a matriz impedância [Z] é dada por:
Logo, a matriz admitância [Y] é:
Considerando os parâmetros do DFIG, a matriz [Y] é:
Para um quadripolo qualquer a matriz condutância [G] é dada por:
Considerando os parâmetros do DFIG, a matriz [G] é:
A matriz susceptância [B] genericamente é dada por:
99
Considerando os parâmetros do DFIG, a matriz [B] é:
Para todas as equações apresentadas,
4.10.1 Limite da Corrente do Rotor
A corrente do rotor é basicamente limitada pela capacidade do conversor do lado
do rotor, cuja potência é 30% da potência nominal do gerador de indução. Portanto,
menores correntes deverão circular pelos enrolamentos do rotor para não danificar o
conversor ligado ao rotor. Diante desse fato, o DFIG apresenta uma capacidade maior
para absorver do que para fornecer potência reativa.
Para determinar a potência aparente do estator como função da corrente do rotor,
deve-se expressar a corrente do estator como função da corrente do rotor. Pela equação
(4.54b), pode-se escrever
A potência aparente do estator como função da corrente do rotor
por:
Substituindo (4.65) em (4.66)
Substituindo os termos da matriz [G] dados pela equação (4.61)
Desprezando-se as resistências perante as reatâncias,
será dada
100
O primeiro termo da equação (4.69) é uma constante desde que a tensão no
estator seja fixa. Essa suposição é razoável desde que a máquina esteja operando com
controle de tensão terminal. O segundo termo pode ser usado para avaliar a potência
reativa, fixando a corrente do rotor no valor nominal da corrente do conversor e
variando-se a sua fase. Alternativamente, a potência aparente pode ser escrita como a
equação de um círculo com raio igual à potência aparente e o centro pela potência ativa
e reativa, da seguinte forma:
onde:
potência reativa injetada no estator [p.u.];
: potência reativa drenada pela máquina [p.u.];
: potência ativa injetada no estator [p.u.];
: potência ativa dissipada pela máquina [p.u.].
depende da resistência do rotor, a qual usualmente é muito baixa, portanto
normalmente despreza-se
Isolando
Sendo que,
. Logo,
101
onde:
: módulo da tensão terminal (tensão do estator) [p.u.];
: módulo da corrente rotor [p.u.];
: reatância de magnetização (reatância do núcleo) e reatância do estator [p.u.].
Nota-se que invariavelmente
é negativo reduzindo a capacidade de injeção
de reativos e aumento da capacidade de absorção de reativos. Este é um dos fatores mais
limitantes para o DFIG, o qual compromete bastante o seu desempenho para a
estabilidade de tensão em relação a outras tecnologias de aerogeradores de velocidade
variável.
O limite de potência reativa
quando a corrente do rotor
que
influencia a
é definido quando
é máxima, mas desde que a tensão
é máximo. Isso ocorre
não varie. Observe
de maneira diretamente proporcional, portanto uma redução de
implica uma diminuição do limite de potência reativa
A escolha da máxima corrente do rotor
.
é tal qual o seu módulo não
extrapole a capacidade do conversor ligado ao rotor. Portanto,
4.10.2 Limite da Corrente do Estator
O estator não apresenta nenhuma limitação em relação ao conversor. A equação
da potência aparente será um círculo de raio potência aparente e centro na origem.
Logo,
Isolando
Sendo que,
102
A potência aparente do estator
é determinada pelos módulos da tensão e da
corrente que circulam pelo estator.
Neste caso, o limite de injeção/absorção de potência reativa
quando circula pelo estator a máxima potência aparente
é atingido
permissível, tal que não
danifique os enrolamentos do estator (limite térmico). Logo,
Sendo que,
4.10.3 Limite da Tensão no Rotor
Usando a equação (4.54a), pode-se expressar a corrente de estator como função
da tensão no rotor,
A potência aparente do estator como função da tensão no rotor
Substituindo (4.80) em (4.81),
Substituindo os termos da matriz [Y] dados pela equação (4.59),
será,
103
O produto
usualmente é pequeno e pode ser desprezado,
Observando que,
e
Logo,
Desprezando-se as resistências,
O primeiro termo da equação (4.86) é fixo, visto que a tensão terminal é
controlada. O segundo termo é variável com o escorregamento e a tensão no rotor e
pode ser usado para avaliar a capacidade de potência reativa fixando-se a tensão do
rotor no valor nominal. A equação da potência aparente pode ser escrita novamente
como a equação de um círculo com raio igual à potência aparente e centro
onde:
potência reativa injetada no estator [p.u.];
: potência reativa drenada pela máquina [p.u.];
: potência ativa injetada no estator [p.u.];
: potência dissipada pela máquina [p.u.].
.
104
As resistências foram desprezadas na presença das reatâncias, então despreza-se
Isolando
,
,
Sendo que,
O limite de injeção/absorção de potência reativa
for máximo. Isso ocorrerá quando a tensão no rotor
tensão
não varie. Observe que
proporcional, portanto uma redução de
de potência reativa
será máximo quando
é máxima, mas desde que a
influência a
de maneira diretamente
implica uma diminuição do limite de injeção
.
A escolha da máxima tensão do rotor
é tal qual o seu módulo não
extrapole a capacidade do conversor ligado ao rotor. Normalmente,
é feito igual à
tensão nominal do conversor. Assim, o limite de injeção/absorção de potência reativa
será dado por:
A tensão no rotor é o fator menos limitante em relação aos outros apresentados.
4.10.4 Definição dos Limites de Potência Reativa do DFIG
Esses limites serão definidos pela interseção das equações (4.74), (4.78) e (4.91),
sendo escolhido o valor de menor módulo. Pelo fato da limitação de tensão do rotor
variar inversamente com o escorregamento, a potência aparente tende aumentar e a
equação (4.91) não apresenta limitações tão restritivas quanto às equações (4.74) e
105
(4.78). A tensão no rotor é um fator limitante somente quando o escorregamento for
elevado.
Como a equação (4.74) apresenta
sempre negativo, veja (4.73b), então os
valor de potência reativa injetada será sempre menor do que o valor de potência reativa
definido pela equação (4.78). Logo, a corrente do rotor é o fator limitante para injeção
de potência reativa por parte do DFIG sendo governado pela equação (4.74).
Em contrapartida, a potência reativa absorvida dada pela equação (4.74) será
maior do que a potência reativa absorvida dada pela equação (4.78) devido ao termo
ser sempre negativo e dessa forma o limite de absorção de potência reativa é definido
pela equação (4.78) referente ao limite de corrente do estator.
4.10.5 Potências Ativa e Reativa Totais Fornecidas pelo DFIG
A potência ativa total fornecida pelo DFIG é dada pela soma da potência ativa
fornecida pelo estator e a potência ativa fornecida pelo GSC.
O link CC transfere somente potência ativa. Desprezadas as perdas nos
enrolamentos e nos conversores, a potência ativa fornecida pelo RSC deve ser igual à
potência ativa fornecida pelo GSC.
Então, a potência ativa total fornecida pelo DFIG será,
A potência ativa fornecida pelo rotor pode ser avaliada pela potência aparente do
rotor
dada por,
106
Novamente, o sinal negativo deve-se a convenção adotada para a potência
saindo da máquina. A tensão no rotor pode ser encontrada como função da corrente do
rotor pela equação (4.54b),
Substituindo (4.96) em (4.95),
Substituindo os parâmetros da matriz [G] dados por (4.61) em (4.97),
O produto
é pequeno comparado a
. Desprezando-se
novamente as resistências,
Comparando as partes reais das equações (4.99) e (4.69), pode-se aproximar,
Logo, a potência ativa total fornecida pelo DFIG, é dada por:
107
Isolando
Substituindo (4.102) em (4.100),
A
equação
(4.102)
é
importante
para
definição
dos
limites
de
fornecimento/absorção de potência reativa do estator definidos pelas equações (4.74),
(4.78) e (4.91). Enquanto que a equação (4.102) é importante para definição do limite de
potência reativa do GSC. Sabendo-se que a potência ativa entregue ao rotor
à fornecida pelo conversor do estator
é a igual
, conforme (4.93), então
O link CC permite operação independente dos conversores RSC e GSC, uma vez
que nenhuma potência reativa é transferida pelo link. Portanto, a potência aparente dos
conversores não pode ser relacionada.
A potência aparente fornecida pelo conversor do lado da rede
Isolando
,
é dada por:
108
Pode-se perceber a importância da equação (4.104) para o cálculo do limite de
potência reativa.
A potência aparente do conversor
conversor
é o produto dos módulos da tensão do
e da corrente que circula pelo conversor
O limite de potência reativa do conversor
corrente sobre o conversor
,
é definido pela máxima
referente à máxima potência aparente que o conversor
pode operar continuamente, dada por:
A corrente máxima do conversor
é definida pela corrente nominal do
equipamento. Portanto, o limite de potência reativa do conversor
é dado por:
A definição do limite de potência reativa do conversor é importante quando o
conversor GSC opera com fator de potência diferente do unitário, fornecendo potência
reativa para o sistema de potência. Neste caso, a potência reativa total fornecida pelo
DFIG é,
O limite de potência reativa que a máquina pode fornecer é,
Conforme apresentado, o limite de injeção de potência reativa por parte do
estator
é limitado pela corrente do rotor, conforme (4.74). Ao passo que o limite
do conversor GSC
não sofre qualquer interferência do conversor RSC devido ao
desacoplamento proporcionado pelo link CC.
109
Substituindo (4.74) e (4.109) em (4.111)
Caso o GSC opere com fator de potência unitário, despreza-se o terceiro termo
da equação (4.112) e o limite de potência reativa do DFIG é dado simplesmente pelo
limite de potência reativa do estator, segundo (4.74).
A equação (4.112) é válida somente quando o GSC entrar em operação, caso
contrário o limite de injeção de potência reativa é dado por (4.113).
O limite de absorção de potência reativa é definido substituindo (4.78) em
(4.111) conjuntamente com (4.109) para caso que o GSC for ativado.
A curva de capacidade é completada substituindo a potência ativa do estator
pela potência ativa total
fornecida pelo DFIG. Portanto, substituindo (4.102) e
(4.104) em (4.112)
Analogamente para o limite de absorção de potência reativa dado por (4.114)
110
Conhecida a velocidade do rotor
através da equação do eixo mecânico, o
escorregamento pode encontrado por:
A potência ativa total
referência
esta relacionada à velocidade do rotor
pela curva de
fornecida pelo fabricante. Dessa forma pode-se obter a curva de
capacidade do DFIG dada na Figura 4.15 considerando somente a operação do RSC
quando a tensão terminal é igual a 1 p.u.
1
s = -0.08
0.9
Potência Ativa (p.u.)
0.8
Limite de Potência
Mecânica da Turbina
0.7
0.6
0.5
Limite de Corrente do Estator
0.4
0.3
Limite de Corrente
do Rotor
s=0
s = 0.07
s = 0.13
0.2
0.1
0
Sub-excitado
-1
-0.8
-0.6
Sobre-excitado
-0.4
-0.2
0
0.2
Potência Reativa (p.u.)
0.4
0.6
0.8
Figura 4.15 Curva de capacidade do DFIG considerando apenas o RSC (tensão terminal igual a 1 p.u.).
A potência mecânica é limitada pelo escorregamento, o qual confere a
velocidade de referência
para obtenção de
que determina o limite de potência
mecânica da turbina dado pelo escorregamento que atinge potência máxima na curva
conforme a Figura 4.16. Nesse caso
.
Se o escorregamento torna-se cada vez mais positivo (operação sub-síncrona) a
curva de capacidade é comprimida pelo limite de potência mecânica conforme indicado
pelos escorregamentos na Figura 4.15. Caso o escorregamento torne-se negativo
(operação sobre-síncrona) a curva de capacidade é expandida. Esse comportamento se
deve ao fornecimento/absorção de potência ativa por parte do GSC, seja quando a
111
velocidade do rotor está acima da velocidade síncrona (operação sobre-síncrona) ou
quando está abaixo da velocidade síncrona (operação sub-síncrona). Devido ao termo
negativo
da equação (4.74), o DFIG tem uma tendência para absorção de potência
reativa, ou seja, conforme a máquina é carregada, o limite de injeção de potência reativa
reduz-se mais do que o limite de absorção potência reativa. Esse comportamento não é
favorável para a estabilidade de tensão, pois ao atingir o limite de potência reativa a
tensão terminal perde controlabilidade, afetando diretamente a tensão terminal e a
capacidade de potência reativa da máquina.
1.1
1
Velocidade (p.u.)
0.9
0.8
0.7
0.6
0.5
0
0.1
0.2
0.3
0.4
0.5
0.6
Potência (p.u.)
Figura 4.16 Curva de referência
0.7
0.8
0.9
1
do DFIG.
A potência aparente depende diretamente da tensão aplicada no barramento
terminal, conforme (4.73a) e (4.77). Se a tensão terminal diminui, a potência aparente
diminui proporcionalmente e o limite de potência reativa na curva de capacidade
também diminui, conforme mostra a Figura 4.17. Esse é um comportamento
desfavorável para a estabilidade de tensão, pois à medida que o sistema de potência é
carregado as reservas de potência reativa tornam-se mais escassas pela depreciação da
tensão.
Para contornar esse comportamento desfavorável, o GSC entra em operação
quando a tensão terminal cai abaixo de 0,9 p.u., fornecendo potência reativa para o
barramento terminal e expandindo o limite de potência reativa, segundo (4.115). A
Figura 4.18 mostra a expansão da curva de capacidade do DFIG quando o GSC entra
em operação para tensão terminal igual 1 p.u. O ganho de margem pelo GSC será
112
decisivo para a preservação da estabilidade de tensão de longo-prazo. Considerando os
dados de fabricantes fornecidos no Anexo, os conversores estão sobredimensionados em
5,3% em relação à potência nominal do DFIG.
1
Potência Ativa (p.u.)
0.8
0.6
Vt=0.95 p.u.
Vt=1.00 p.u.
Vt=1.05 p.u.
0.4
0.2
Sobre-excitado
Sub-excitado
0
-1
-0.8
-0.6
-0.4 -0.2
0
0.2
Potência Reativa (p.u.)
0.4
0.6
0.8
1
Figura 4.17 Curva de capacidade para diferentes valores de tensão terminal.
1
0.9
0.8
Potência Ativa (p.u.)
0.7
DFIG(RSC)
DFIG(RSC+GSC)
0.6
0.5
0.4
DFIG(RSC) Qtmax
0.3
DFIG(RSC+GSC) Qtmax
0.2
0.1
0
-1.5
-1.2
-0.9
-0.6
-0.3
0
0.3
Potência Reativa (p.u.)
0.6
0.9
1.2
Figura 4.18 Curva de capacidade completa para tensão terminal igual a 1 p.u.
4.11
Cálculo dos Limites das Malhas de Controle do RSC
Definidos os limites da curva de capacidade podem-se definir os limites
presentes nas malhas de controle de potência ativa e reativa do RSC na Figura 4.13. Os
limites de tensão são avaliados posteriormente.
113
4.11.1 Malha de Controle de Potência Ativa
Os valores máximos e mínimos de potência ativa e as suas respectivas taxas de
variação de potência são determinados em função das características aerodinâmicas da
turbina eólica e do comprimento das pás, o qual define a potência nominal que a turbina
eólica pode fornecer [60]. Dessa forma o controle de passo atua para evitar a fadiga
mecânica das pás e restrito sob uma taxa de variação imposta pela dimensão da turbina
eólica [60]. Portanto, conhecido
determinar o torque máximo
e
pelos dados do fabricante, pode-se
e o torque mínimo
pela equação do torque.
Naturalmente, na base da máquina, tem-se:
e
Pela equação (4.53a) da potência ativa do estator, pode-se calcular os limites da
componente
.
Isolando
Mas,
Logo,
, porém
e
Logo,
podem ser calculados pelos valores do torque máximo e
torque mínimo segundo (4.118).
114
4.11.2 Malha de Controle de Potência Reativa
Os limites de potência reativa
e
correspondem aos limites de
injeção e absorção de potência reativa do estator, calculados na secção anterior segundo
as equações (4.74) e (4.78). Pela equação (4.53b), referente à potência reativa do
estator, pode-se definir os limites
e
correspondente as componentes
reativas de injeção e absorção.
Isolando
Portanto,
,
e
serão definidos por
e
, respectivamente.
4.11.3 Avaliação dos Termos
As malhas de controle do RSC com conversores do tipo fonte de tensão
comandam em um laço de controle mais interno as componentes da corrente do rotor
(
e
) e em um laço de controle externo a velocidade do rotor ou tensão terminal,
dependendo da malha de controle. Segundo Slootweg [58], as malhas de controle de
corrente possuem constantes de tempo muito pequenas, e rapidamente a corrente do
rotor atinge o valor de referência (próximo de 10 ms). Logo, pode-se desprezar a malha
interna de corrente, assumindo que a corrente do rotor atinge sua referência
instantaneamente quando a tensão terminal não se afasta de seu valor nominal.
Nesse caso, desprezar a malha interna de corrente simplifica o modelo do
gerador de indução. Isso elimina pequenas constantes de tempo associadas ao rotor,
aumenta o passo de integração e reduz o esforço computacional sem perda de precisão
nos resultados. Contudo, durante uma falta, a tensão terminal sofre uma queda abrupta e
a suposição de tensão terminal constante não é mais válida. Porém, para estudos de
estabilidade de tensão de longo-prazo no qual a tensão terminal não varia bruscamente,
115
o modelo proposto por Slootweg [58], no qual os conversores são modelados como
fontes de corrente controladas é válido.
Nunes [30] avalia a estabilidade transitória sob dois modelos de conversores
(fonte de corrente e fonte de tensão) e chegou à conclusão de que ambos fornecem
resultados muito parecidos e igualmente precisos. Porém, essa conclusão foi tomada
para uma falta aplicada distante do parque eólico, ou seja, a tensão terminal do parque
eólico sofre poucas consequências devido à alta impedância entre o ponto de falta e o
barramento do parque eólico. Para uma falta próxima ao parque eólico, o autor utiliza
apenas o modelo fonte de corrente, impossibilitando tomar qualquer conclusão
comparativa entre os modelos fonte de corrente e fonte de tensão.
Ekanayake [57] comparou os modelos do DFIG de 3ª e 5ª ordens para estudos
estabilidade transitória considerando que os conversores são modelados como fontes de
tensão. O autor concluiu que os modelos de alta ordem apresentam picos de correntes
significativos para faltas localizadas próximo ao aerogerador podendo causar atuação do
crowbar para o caso em que modelos de 3ª ordem não provocariam atuação dessa
proteção. Esse resultado justifica que para estudos de estabilidade transitória o modelo
adotado para o DFIG deve ser representado pelo modelo de 5ª ordem. Por outro lado,
para estudos de estabilidade de tensão de longo-prazo a janela de tempo de interesse
envolve constantes de tempo muito maiores, podendo novamente desprezar a malha
interna de corrente e adotar o modelo proposto por Slootweg [58].
Outra justificativa para desprezar a malha interna de corrente e adotar o modelo
fonte de corrente esta no fato de que a tensão do rotor não limita a capacidade de
potência reativa do DFIG, conforme exposto na seção 4.10.3. Portanto, desprezar a
malha corrente não causará perda na precisão dos resultados para estudos de
estabilidade de tensão de longo-prazo.
Apesar da discussão anterior, a malha de corrente foi representada porque o
modelo inicialmente desenvolvido para o DFIG foi feito para estudos de estabilidade
transitória [56] e os limites de tensão são escolhidos com valores suficientemente altos
( 1 p.u.) de tal forma que a tensão do rotor não seja saturada.
4.12
Conclusões
O suporte de potência reativa por parte do DFIG para aumento da margem da
estabilidade de tensão é uma alternativa empregada por muitos operadores de sistema do
116
mundo todo. Contudo, para se obter êxito na avaliação da estabilidade de tensão é
irrevogável o uso de um modelo adequado, seja para diminuição do esforço
computacional como para obtenção de resultados mais precisos [54].
O modelo originalmente desenvolvido para o DFIG era empregado para estudos
de estabilidade transitória [56], na qual a janela de tempo é muito menor do que a janela
da estabilidade de tensão de longo-prazo. Uma das grandes diferenças nesses estudos
está na variação da velocidade do vento. Para a estabilidade transitória a potência
mecânica é constante durante o intervalo de tempo de estudo, enquanto para a
estabilidade de tensão de longo-prazo a velocidade do vento varia com o tempo,
modificando os limites de potência reativa. Esta consideração é uma das principais
contribuições desta tese para a avaliação da estabilidade de tensão de longo-prazo,
definindo os chamados de limites variáveis.
Limites variáveis são limites que variam com as condições de operação do
aerogerador, seja pela característica da demanda como pela intermitência da fonte
eólica, sendo inquestionável a inclusão desses limites nas malhas de controle do
aerogerador para produção de resultados que represente uma condição muito próxima
da real das reservas de potência reativa do parque eólico.
A determinação correta das reservas de potência reativa contribui muito para a
decisão do operador de sistema sobre qual gerador deve ser incluído no controle
secundário de tensão para melhoria da margem de estabilidade de tensão. Uma
estimação inadequada das reservas de potência reativa pode conduzir o operador de
sistema a falsas conclusões sobre a estabilidade de tensão de longo-prazo do sistema de
potência.
A operação do GSC no suporte de potência reativa causa uma expansão
significativa na curva de capacidade do DFIG, podendo contribuir efetivamente para a
preservação da estabilidade do sistema de potência. Muitos estudos realizados
consideram a operação do GSC somente para o ridethrough quando o crowbar atua
bloqueando o RSC para não danifica-lo, nessa situação o GSC fornece potência reativa
para a rápida restauração da tensão terminal e desbloqueio do RSC, trazendo o DFIG
para operação normal [17].
O Capítulo 6 demonstra por meio de resultados a contribuição dos limites
variáveis e do GSC para a avaliação da estabilidade de tensão de longo-prazo.
117
Capítulo 5
Gerador Síncrono com Conversor de Capacidade
Nominal
5.1
Introdução
O FRC e o DFIG são as concepções de aerogeradores mais utilizadas nos grandes
parques eólicos do mundo todo, dominando uma fatia considerável do mercado eólico
de fabricantes, conforme apresentado no Capítulo 2.
O FRC é uma concepção de aerogerador a velocidade variável que pode ou não
empregar caixa de engrenagens. A supressão da caixa de engrenagens evita custos de
manutenção e interrupções, além de reduzir os custos fixos. Porém, um aerogerador sem
caixa de engrenagens necessita de um gerador elétrico com muitos polos para poder
compensar a baixa rotação da turbina eólica, tornando o gerador elétrico grande, pesado
e caro. Isto exige que as naceles do FRC sejam maiores do que as do DFIG,
encarecendo o custo do aerogerador FRC. Contudo, a caixa de engrenagens quando
utilizada possui uma relação de engrenagens baixa e o projeto é simples e não onera o
custo significativamente, pois o gerador elétrico possui uma grande quantidade de
polos. Quando a caixa de engrenagens é eliminada, normalmente, adota-se o gerador
síncrono, seja de rotor bobinado ou a imã permanente. O gerador síncrono a imã
permanente é mais eficiente eletricamente e mais leve, porém mais caro do que o
gerador síncrono de rotor bobinado. Nesta tese a ênfase será dada ao FRC com gerador
síncrono de rotor bobinado, amplamente produzido pela fabricante alemã Enercon [68].
O FRC com gerador síncrono de rotor bobinado emprega uma ponte retificadora
a diodos nos terminais do gerador síncrono ou conectado por transformador para
adequação do nível de tensão. O fluxo de potência processado pela ponte retificadora é
unidirecional, por conseguinte, não há controle sobre a potência transferida do
retificador ao link CC. O controle da tensão do barramento CC é realizado por um
118
chopper tipo boost, enquanto que a potência ativa fornecida para rede e a tensão
terminal são ambas controladas por inversor PWM do tipo fonte de tensão controlada,
semelhante aos conversores do DFIG. A operação em velocidade variável é alcançada
pelo inversor PWM que desacopla totalmente a frequência mecânica de rotação do
gerador da frequência elétrica do sistema de potência.
Vários estudos foram realizados com o FRC para avaliação da capacidade de
ridethrough do aerogerador [68-70]. Entretanto, poucos estudos foram realizados com o
FRC com o objetivo de avaliar a estabilidade de tensão de longo-prazo, especialmente
considerando a sua capacidade de potência reativa e a inclusão de limites variáveis nas
malhas de controle.
Devido o FRC ser um aerogerador a velocidade variável, existe algumas
semelhanças entre o FRC e o DFIG. De fato, a representação estática do FRC para
estudos de fluxo de carga é a mesma do DFIG, podendo ser representado por barra PV
ou barra PQ, dependendo do propósito do controle: tensão terminal ou fator de potência.
A turbina eólica e o controle de passo seguem a mesma estratégia de aproveitamento
ótimo do recurso eólico e evitar sobrecarga mecânica sobre as pás para velocidades de
vento elevadas. O eixo mecânico é representado pelo modelo massa global
simplesmente porque não existe caixa de engrenagens, logo o eixo pode ser considerado
rígido e a equação (4.13) é válida também para o FRC. Devido a essas semelhanças
esses componentes não serão abordados neste capítulo.
Esse capítulo segue os mesmos objetivos do capítulo anterior: modelagem do
gerador para estudos de estabilidade de tensão, modelagem das malhas de controle dos
conversores, definição da curva de capacidade e dos limites variáveis das malhas de
controle dos conversores considerando as limitações do aerogerador.
5.2
Modelo do Gerador Síncrono com Rotor Bobinado
Pelo fato da rotação em baixa velocidade, o gerador síncrono é modelado como
tendo polos salientes, constituído de um enrolamento de campo e dois enrolamentos
amortecedores: um no eixo direto e outro no eixo em quadratura. Como o conceito de
operação desta máquina é a velocidade variável, a fim de otimizar a geração da turbina
eólica, poderão ocorrer grandes excursões da velocidade angular do rotor
. Portanto,
este efeito foi considerado no cálculo do torque eletromagnético e da tensão
subtransitória
. Para a solução da rede CA do lado do retificador, a máquina foi
119
representada por uma tensão
atrás da reatância subtransitória de eixo direto
saliência subtransitória foi desprezada). A dinâmica das componentes
e
(a
é
mostrada na Figura 5.1 abaixo.
L'D' L L
L'D L L
E FD
1
sT d' 0
EQ' /
1
sT d''0
LD LL
L D L'D
SAT
L D L'D
L'D L L
ID
L'D' LL
E Q''
L'D L'D'
EQ'' /
(a) Diagrama de bloco do eixo direto.
ED'' /
1
sT qo''
LQ L'Q'
IQ
E D''
(b) Diagrama de bloco do eixo em quadratura.
Figura 5.1 Diagrama de blocos das equações do gerador síncrono de polos salientes [69].
5.3
Malha de Controle da Tensão do Capacitor
A Figura 5.2 mostra o circuito do chopper tipo boost do link CC. Este circuito
funciona pelo controle do disparo e do corte da chave de potência G1. Quando a chave é
fechada, a corrente
sobre o indutor aumenta, armazenando energia no campo
magnético. Ao abrir a chave, o diodo D1 entra em condução imediatamente, carregando
o capacitor. Este chaveamento é realizado em alta frequência (ordem de kHz) através do
controle do índice de modulação
que comanda a abertura ou o fechamento da chave
120
de potência G1, por sua vez controlando a tensão
do capacitor e a corrente
. Este
chopper é chamado de boost porque a tensão de saída é sempre maior do que a tensão
de entrada, consequentemente o índice de modulação está no intervalo
[68].
D1
I cc 1
I cc' 2
I cc 2
C
I cc
L
Vcc1
m1
G1
VC
Controle
Figura 5.2 Chopper tipo boost.
A tensão
é o valor médio da saída do retificador em ponte de 6 pulsos a
diodos, dada por [68]:
sendo
o valor médio da tensão de saída do retificador sem carga terminal,
éa
resistência de comutação a qual depende da indutância parasita da fonte [66] e
éo
valor médio da corrente de saída do retificador. Caso exista um filtro conectado na barra
terminal do gerador síncrono, a resistência de comutação
da reatância do transformador
resistência de comutação
será dependente somente
. Porém, o esquema adotado não emprega filtros e a
deve incluir a reatância subtransitória
síncrono além da reatância do transformador
do gerador
. Logo [69],
Como não existe filtro conectado na barra terminal do gerador, a tensão de
comutação será a tensão subtransitória
será dada por [68]:
do gerador síncrono [69]. Portanto, a tensão
121
Para representar a equação (5.3) em p.u. deve-se escolher uma base conveniente
para ambos os lados e considerar a relação de transformação
do transformador.
Logo,
onde
é a constante do retificador. Substituindo (5.5) em (5.1),
A tensão sobre o indutor será dada por:
onde
é a tensão sobre a chave de potência G1 e L a indutância do indutor. A tensão
sobre o capacitor será calculada como:
sendo C a capacitância do capacitor. Para controlar a tensão do capacitor
e a corrente
do indutor
é necessário estabelecer relações entre essas variáveis e o índice de
modulação
Admitindo que não existe perdas na chave de potência G1 e no diodo
D1, pode-se escrever [68]:
Em termos de valores médios, o chopper conversor funciona como um transformador
CC. O índice de modulação
será dado por:
122
Pelas equações (5.4) – (5.10) é possível construir o diagrama de blocos da malha
de controle do chopper conforme a Figura 5.3. Os limites relativos ao índice de
modulação foram definidos anteriormente e os limites de corrente dependem das
capacidades nominais da chave de potência e do diodo e não dependem das condições
de ventos, portanto esses limites são fixos durante todo o estudo.
Retificador
R cr
I CC 2
Chopper
Indutor
E ''
a1 K c1
VCC1
Vd 0r
ICC1
1
sL
IC
I CC 2'
VCC 1'
Controle do Chopper
V C ref
I REF max
Vc
1
sC
VC
m1max
I REF max
I REF
P+I
VC
Capacitor
I REF min I REF min
Ic
m1max
m1
P+I
m1min
m1min
Figura 5.3 Diagrama de blocos da malha de controle do chopper [69].
O controle do chopper é dividido em duas malhas de controle. A malha externa
controla a tensão do capacitor produzindo uma corrente de referência
para a malha
interna, a qual controla o índice de modulação para retornar a tensão do capacitor para a
referência
e a corrente do indutor para
. As dinâmicas do indutor e do
capacitor são representadas pelas funções de transferências
e
,
respectivamente. O controle da tensão do capacitor é imprescindível para operação
adequada do inversor PWM. Caso a tensão do capacitor ultrapasse a faixa
p.u., o parque eólico é desconectado do sistema de potência.
123
O resistor de dissipação
, acionado exclusivamente para suavizar os
transitórios eletromecânicos decorrente de faltas, não esta representado na Figura 5.3.
Quando ocorre um curto-circuito próximo ao aerogerador, a potência elétrica tende a
diminuir e o rotor a acelerar. O resistor de dissipação evita que a máquina acelere
dissipando energia até que o controle de passo atue diminuindo a potência elétrica de
saída. A representação foi omitida porque para estudos de estabilidade de tensão de
longo-prazo não ocorre atuação do resistor de dissipação pelo incremento da carga.
5.4
Malha de Controle do Inversor
A Figura 5.4 mostra a representação do inversor PWM, idêntica aos conversores
do DFIG. Para a rede CA o inversor é visto como uma fonte de tensão com módulo
fase
e
controladas. O módulo é diretamente proporcional à tensão do capacitor e ao
índice de modulação
. Para o link CC o inversor é visto como uma fonte de corrente
com magnitude diretamente proporcional ao índice de modulação
A dinâmica do
conversor é tão rápida que esta fora da janela de tempo de interesse da estabilidade de
tensão de longo-prazo, sendo representada simplesmente por equações algébricas, dadas
por [69]:
onde as constantes
e
são definidas da maneira como foi feito para o DFIG.
Vt
Ic
'
I CC
2
Barra
Terminal
Xt 2
Sistema CC
S
ICC 2
I cc
RD
E 2
VC
Inversor
Figura 5.4 Representação do inversor de tensão [69].
m2
2
124
Para se definirem as malhas de controle do inversor é necessário estabelecer uma
estratégia para o controle vetorial. A Figura 5.5 apresenta a orientação para o controle
vetorial do inversor na qual a tensão terminal
está alinhada com o eixo em quadratura
do controle vetorial, de forma semelhante ao que foi feito para o GSC. Para que o
controle vetorial seja efetivo é necessário realizar uma transformação de eixos, pois as
variáveis do eixo do sistema de potência
eixo do controle
possuem uma referência diferente do
. Observe que a tensão interna do inversor
no eixo do sistema de potência porque a fase
esta representada
é medida em relação a esse eixo.
O inversor é responsável pelo controle de potência ativa e tensão terminal/fator
de potência, conforme especificado.
Im
q
E 2
Vt
d
i2
Vqc
Vdc
2
Re
Figura 5.5 Estratégia de controle para o inversor [69].
As potências ativa e reativa fornecidas para a rede são dadas por:
As equações (5.12a,b) estão representadas no eixo do controle, sendo
componentes de eixo direto e quadratura da tensão terminal
e
as
, respectivamente;
e
são as componentes de eixo direto e quadratura da corrente do conversor
respectivamente. Pela Figura 5.5 nota-se que:
e
,
125
Aplicando as condições de contorno (5.13) as equações (5.12a,b), obtém-se:
Portanto, a potência ativa pode ser controlada pela componente
reativa pela componente
e a potência
.
Como inversor PWM é uma fonte de tensão controlada, necessita-se estabelecer
relações entre as potências ativa e reativa fornecidas para a rede com as componentes
e
da tensão interna
do inversor representada no eixo do controle. Todos os
transitórios do estator (rede) são desprezados de modo que as variáveis do sistema de
potência atingem o regime permanente instantaneamente. Ao invés de usar as equações
de Pena [67] como foi feito para o GSC, admitindo regime permanente pela Figura 5.4,
pode-se escrever:
Aplicando as condições de contorno (5.13) em (5.16),
Comparando ambos os lados da equação (5.18), pode-se inferir:
Pelas equações (5.14a,b) e (5.19a,b) a potência ativa/velocidade é controlada
pela componente
componente
, enquanto que a potência reativa/tensão terminal é controlada pela
. Com base nessas informações, podem-se formular as malhas de
126
controle do inversor, definidas na Figura 5.6. Observe que essas malhas são muito
semelhantes às malhas de controle do RSC definidas para o DFIG.
r
Temax
ref
Teref
P+I
Temin
Pmin & dP / dt min
Vdcmax
I qcmax
I qREF
P+I
I qc
I qc min
Vdcmax
Vdc
P+I
I qc min
Pref
1
1 sTP
Temin
I qcmax
Pc
Pmax & dP / dt max
Temax
Vdcmin
Vdcmin
(a) Malha de controle de potência ativa/velocidade.
V ref
Vt
Qc
Q c max Q
c max
P+I
Q c min Q c min
I dcmax
Q REF
I dcmax
I dREF
P+I
I dcmin
I dc
I dcmin
Vqcmax
Vqcmax
Vqc
P+I
Vqc min
Vqc min
(b) Malha de controle de tensão terminal/fator de potência.
Figura 5.6 Malhas de controle do inversor [69].
Novamente os limites de tensão e corrente das malhas de potência ativa e
potência reativa, podem ser definidos do mesmo modo que foram obtidos para o GSC.
O limite
é dado por (veja Figura 5.7):
127
onde
é a corrente nominal do inversor. O limite de tensão do inversor pode
apresentar limitações mais severas do que a corrente nominal, porém à medida que o
inversor e o link CC são sobredimensionados, a corrente nominal torna-se a principal
limitação de potência reativa [40]. O limite de tensão foi desprezado no cálculo dos
limites do GSC e também desprezado no cálculo dos limites do inversor. Logo, os
limites de tensão são dados por:
q
Ic
corrente não-limitada
I c max
I qc
corrente limitada
I dcmax
d
Figura 5.7 Limitação de corrente do inversor [69].
A Figura 5.8 apresenta o sistema de controle do FRC mostrando como as
malhas de controle interagem. A tensão do capacitor
através do índice de modulação
é controlada pelo chopper
. É importante ressaltar que o controle da tensão
do link CC é indispensável para a operação adequada do inversor, o qual é a principal
interface com o sistema de potência.
A velocidade do gerador é controlada pela demanda
para a curva de referência
, a qual serve de entrada
(disponível no Anexo) que realimenta o controle
do inversor pelo erro de velocidade para a malha de controle de potência ativa dada na
Figura 5.6(a). Caso a velocidade do gerador seja maior do que a velocidade nominal
128
(
) o controle de passo atua aumentando o angulo de passo para reduzir a
potência mecânica entregue pela turbina eólica.
A tensão terminal é controlada pela tensão de referência
, a qual pode ser
fornecida pelo um controle secundário de tensão, ou simplesmente, o valor nominal da
tensão terminal. O erro de tensão serve a malha de controle de potência reativa dada na
Figura 5.6(b). Caso o controle do fator de potência seja especificado, a potência reativa
é calculada de modo a manter constante o fator de potência desejado.
Regulador de
Tensão
V1
I CC 2
E fd
Gerador
Síncrono
E"
Tm
Filtro e
Transformador
I1
Turbina
Eólica
V
r max
VCC1
I CC1
Controle de
Passo
Retificador a
Diodo
Sistema CC
VC
m2
m1
Controle do
Chopper
E2 2
Inversor de
Tensão
Pt
2
Vt
V
Controle do
Inversor
ref
Xt2
Vref
Pref Wref
Figura 5.8 Sistema de controle do FRC.
5.5
Curva de Capacidade do FRC
A curva de capacidade determina os limites de potência reativa
da malha de controle de tensão terminal/fator de potência.
A capacidade de potência reativa do FRC está intimamente ligada à capacidade
do
inversor,
a
qual
pode
ser
aumentada
por
um
pequeno
custo
no
sobredimensionamento do inversor, oferecendo capacidades de potência reativa até 0,6
p.u. em carga nominal [40]. A viabilidade econômica do incremento da capacidade do
inversor com o suporte de reativa como parte de serviços ancilares oferecidos pelos
aerogeradores FRC é comprovadamente positiva para o investidor e para a estabilidade
do sistema de potência [40,51].
A avaliação correta dos limites de potência reativa é necessária para não
danificar o inversor e criar conclusões errôneas a respeito da margem de estabilidade de
tensão do sistema de potência.
A curva de capacidade do inversor é um semicírculo centrado na origem com
raio igual à potência aparente. A limitação de potência reativa nesse caso se deve a
129
corrente máxima que o equipamento pode suportar, a qual foi realizada igual à corrente
nominal. Essa limitação é idêntica ao limite de corrente do estator para o DFIG,
matematicamente dada por:
e
onde
A capacidade do inversor sofre dos mesmos efeitos adversos da redução da
tensão terminal como foi exposto para o DFIG. Isso pode ser comprovado pela equação
(5.22c) que relaciona diretamente a tensão terminal com a potência aparente.
Normalmente, o inversor é sobredimensionado acima do nominal do gerador,
seja para o aerogerador cumprir as metas do código de rede ou para o investidor obter
maiores ganhos fornecendo potência reativa ao sistema de potência em momentos que a
velocidade dos ventos é baixa. Nesse sentido é importante considerar a limitação de
potência mecânica da turbina eólica, pois o inversor sobredimensionado possui
capacidade maior do que a turbina. Logo, a curva de capacidade do FRC deverá ser
limitada também pela potência mecânica nominal da turbina eólica.
A Figura 5.9 compara as curvas de capacidades do DFIG e FRC considerando a
operação do GSC para tensão terminal nominal. Essas curvas foram plotadas na base de
potência do DFIG, cujos dados encontram-se no Anexo conjuntamente com os dados do
FRC. As curvas de capacidade do DFIG na Figura 5.9 são as mesmas apresentadas no
capítulo anterior e a curva de capacidade do FRC considera o mesmo
sobredimensionamento de 5,3% para a capacidade do inversor em relação à potência
mecânica da turbina eólica, ou seja, a potência nominal do inversor é igual a 895 kVA.
Conforme a potência ativa aumenta, ocorre redução do limite de potência
reativa. Por este motivo, considerar os limites de potência reativa fixos é uma hipótese
conservadora a respeito da estabilidade de tensão de longo-prazo, pois a velocidade do
vento esta variando continuamente, modificando a potência ativa e consequentemente o
limite de potência reativa.
130
É notável o ganho de potência reativa do DFIG quando o GSC entra em
operação, superando o FRC o qual apresenta conversores com capacidade superior.
Porém, quando o GSC opera com fator de potência unitário, ou seja, sem fornecer
potência reativa, o FRC apresenta um limite bem maior de potência reativa em relação
ao DFIG.
1
0.9
Potência Ativa (p.u.)
0.8
Limite da Turbina Eólica
0.7
0.6
DFIG (RSC) Qmax
0.5
0.4
FRC Qmax
0.3
DFIG (RSC+GSC) Qmax
0.2
DFIG(RSC)
FRC
DFIG(RSC+GSC)
0.1
0
-1.5
-1.2
-0.9
-0.6
-0.3
0
0.3
Potência Reativa (p.u.)
0.6
0.9
1.2
Figura 5.9 Curva de capacidade do DFIG e FRC para tensão terminal igual a 1 p.u.
Aumentando a capacidade nominal do inversor para 1 MVA, ou seja,
considerando um sobredimensionamento de 17,6% em relação a potência mecânica da
turbina eólica, o limite de potência reativa do FRC praticamente iguala-se ao
DFIG(RSC+GSC), conforme mostra a Figura 5.10. Em relação ao caso anterior, houve
um acréscimo de 12,3% de capacidade no inversor do FRC para que este pudesse
igualar o limite de potência reativa do DFIG(RSC+GSC), levando em conta que os
conversores do DFIG estão sobredimensionados em apenas 5,3%. Isto explica a
importância do GSC para a estabilidade de tensão de longo-prazo.
Naturalmente, conforme aumenta a capacidade do inversor o custo da energia
gerada fica mais cara, dessa forma o DFIG pode oferecer energia mais barata do que o
FRC para um mesmo nível de segurança do sistema de potência. A análise de diferentes
sobredimensionamentos do inversor do FRC e dos conversores do DFIG sobre a
estabilidade de tensão de longo-prazo, assim como a análise de custo envolvida no
preço da energia gerada está fora do escopo desta tese de doutorado.
131
1
0.9
0.8
Potência Ativa (p.u.)
0.7
0.6
0.5
0.4
0.3
DFIG(RSC)
FRC
DFIG(RSC+GSC)
0.2
0.1
0
-1.5
-1.2
-0.9
-0.6
-0.3
0
0.3
Potência Reativa (p.u.)
0.6
0.9
1.2
Figura 5.10 Curvas de capacidade considerando a potência do inversor do FRC igual a 1 MVA.
5.6
Conclusões
Valendo-se das conclusões do capítulo anterior, os limites variáveis nas malhas
de controle do inversor do FRC são adotados nesta tese para adequação quanto à
premissa da variação da velocidade do vento nos estudos de estabilidade de tensão de
longo-prazo.
A construção da curva de capacidade do FRC é muito mais simples do que a
curva do DFIG, apresentando limitações apenas para o inversor e turbina eólica.
Dependendo do sobredimensionamento dado ao inversor, a capacidade de
potência reativa do FRC pode ser expandida por um custo muito baixo. Em condições
nominais, o FRC apresenta capacidade maior do que o DFIG, porém quando o GSC
entra em operação o DFIG supera o FRC. Entretanto, não existe na literatura qualquer
estudo comparativo entre o DFIG e o FRC qualificando a importância de cada
tecnologia para preservação da estabilidade de tensão de longo-prazo.
O próximo capítulo demonstra por meio de resultados a contribuição de cada
tecnologia de aerogerador na estabilidade de tensão de longo-prazo.
132
Capítulo 6
Resultados
6.1
Introdução
Este capítulo apresenta os resultados de simulações referentes aos estudos e análises do
impacto de aerogeradores a velocidade fixa e variável na estabilidade de tensão de
longo-prazo de sistemas de potência, realizados em diferentes cenários de operação
envolvendo, sobretudo, os modelos dinâmicos do OEL e OLTC, combinados com
modelos estáticos e dinâmicos de cargas (motor de indução), usando simulações no
domínio do tempo.
Primeiramente, a estabilidade de tensão será avaliada pela comparação dos
aerogeradores SCIG e DFIG, desprezando inicialmente o efeito dos limites variáveis nas
malhas de controle. Em seguida, os modos de controle (fator de potência ou tensão
terminal) dos aerogeradores a velocidade variável são analisados sob o ponto de vista da
estabilidade de tensão de longo-prazo.
Outro estudo abordado na presente tese é a análise da contribuição de
aerogeradores a velocidade variável para a estabilidade de tensão de longo-prazo
considerando cenários de regimes de velocidades de vento alta e baixa.
Todos os estudos anteriores consideram o conversor GSC do DFIG operando
com fator de potência unitário, ou seja, sem fornecer potência reativa. O último estudo
desta tese analisa a contribuição decisiva do conversor GSC do DFIG no suporte de
potência reativa para o controle da tensão terminal e prevenção do colapso de tensão.
Todas as simulações foram realizadas utilizando os softwares ANAREDE e
ANATEM
desenvolvidos
pelo
CEPEL
[71,72],
ferramentas
computacionais
amplamente usadas para realização de estudos de expansão e operação do sistema
elétrico brasileiro.
133
6.2
Sistema Teste
A rede elétrica adotada nas simulações desta tese de doutorado é apresentada na
Figura 6.1 por meio do seu diagrama unifilar. Para fins dos estudos pretendidos, foram
realizadas modificações no sistema original apresentado na referência [49], no qual
foram acrescentados a barra 12 e do transformador T6 para conexão do parque eólico
indicado na barra 12. Duas gerações síncronas convencionais são modeladas: G2 e G3.
G1 é a barra de referência do sistema de potência podendo ser considerado um sistema
de grande porte. Dependendo do estudo analisado o parque eólico é representado,
alternadamente por aerogeradores: SCIG, DFIG ou FRC. O dispositivo OEL encontrase instalado nos geradores G2 e G3. O OLTC está conectado no trecho entre as barras
10 e 11. Os modelos e dados do OEL [49] e OLTC [73] adotados nas simulações
encontram-se no Anexo. Dependendo do estudo realizado, diferentes cenários de carga
e geração são adotados, bem como diferentes composições a respeito da carga. O parque
eólico segue o regime de ventos indicado na Figura 6.2.
6
1
T1
7
T3
G3
5
G1
T4
Barra
Inifinita
3
2
8
T6
T2
G2
T5
9
18
Velocidade do vento (m/s)
16
14
12
10
8
0
50
100
150
Tempo (s)
200
Figura 6.2 Regime de ventos.
250
Parque
Eólico
10 OLTC 11
Figura 6.1 Diagrama unifilar do sistema teste.
6
12
300
134
6.3
Impactos Causados pela Integração de Aerogeradores SCIG e DFIG [74]
Diferentes cenários de geração foram considerados conforme a Tabela 6.1. Para
ambos os cenários foi considerada uma geração de 200,9 MW na barra 12, composta
por um parque eólico de 250 máquinas de 850 kW. O parque eólico é constituído ora
por aerogeradores DFIG ora por aerogeradores SCIG, alternadamente, de modo a
avaliar seu impacto na estabilidade de tensão de longo-prazo.
Para o caso do DFIG, a geração eólica foi declarada no fluxo de carga como
barra PQ gerando 200,9 MW + j0,0 Mvar e nas simulações dinâmicas foi considerado o
controle da tensão terminal. No caso do SCIG foi alocado um banco de capacitores na
barra 12 para compensar a potência reativa consumida pelo aerogerador, de modo que
ele opere com fator de potência unitário. Este ajuste foi feito considerando apenas o
Cenário 1. As simulações são encerradas em 200 segundos.
A carga da barra 8 foi representada 100% como impedância constante, e a carga
da barra 11 foi representada por 50% corrente constante e 50% impedância constante,
tanto para a componente de potência ativa quanto para a de potência reativa.
Tabela 6.1 Cenários de geração.
Cenário
Gerador 1
Gerador 2
Gerador 3
DFIG
P(MW) Q(Mvar) P(MW) Q(Mvar) P(MW) Q(Mvar) P(MW) Q(Mvar)
Cenário 1 3.767,9 462,7 1.736,0 -236,1 1.154,0 389,8
200,9
0,0
Cenário 2 4.312,4 1.086,4 1.736,0 422,4 1.154,0 1.030,2 200,9
0,0
Cenário
Gerador 1
Gerador 2
Gerador 3
SCIG
P(MW) Q(Mvar) P(MW) Q(Mvar) P(MW) Q(Mvar) P(MW) Q(Mvar)
Cenário 1 3.767,9 462,7 1.736,0 -236,1 1.154,0 389,8
200,9
0,0
Cenário 2 4.321,0 1.109,9 1.736,0 450,1 1.154,0 1.059,4 200,4
-8,5
Para avaliar os diferentes impactos causados pelos aerogeradores SCIG e DFIG
na estabilidade de tensão de longo-prazo, duas análises foram feitas, as quais são
apresentadas a seguir.
Abertura de uma linha de transmissão no trecho 6-7 quando o sistema de
potência opera no Cenário 2;
Aumento gradativo da carga de 20% em relação à carga inicial do Cenário 1.
135
6.3.1 Abertura de uma Linha de Transmissão no Trecho 6-7
Nesta análise considera-se o cenário 2 e aplica-se a abertura de uma linha de
transmissão entre as barras 6 e 7 no instante de 1 segundo. Após a abertura da linha de
transmissão, a demanda por reativos no sistema aumenta e os geradores tendem a
fornecer mais reativos, aumentando a corrente de campo das máquinas. No entanto, a
corrente de campo não pode aumentar indefinidamente de modo a manter a máquina em
operação segura e estável. Assim, quando a corrente ultrapassa um determinado valor
limite, o OEL atua reduzindo a corrente de campo, e consequentemente a potência
reativa fornecida pela máquina. Isto pode ser observado na Figura 6.3, que mostra a
redução da corrente de campo do gerador G3 e a consequente redução na potência
reativa fornecida pela máquina. Nota-se quando o DFIG está operando, o gerador G3
apresenta uma excitação menor, ocasionando uma retardação um pouco maior na
atuação do OEL, neste caso o OEL atua no instante de 11 segundos, enquanto para o
SCIG o OEL atua em 9 segundos. Ressalta-se que a atuação do OEL pode contribuir de
forma efetiva para o fenômeno da instabilidade de tensão.
1.85
1400
Potência Reativa injetada por G3 (Mvar)
1.8
Corrente de campo de G3 (p.u)
DFIG
SCIG
DFIG
SCIG
1.75
1.7
1.65
1.6
1.55
1300
1200
ação do OEL
1100
1000
900
1.5
0
20
40
60
80
100
120
Tempo (s)
140
(a) Corrente de campo.
160
180
200
800
0
20
40
60
80
100
120
Tempo (s)
140
160
180
(b) Potência reativa.
Figura 6.3 Comportamento das variáveis do gerador G3.
Com uma queda significativa na tensão, quer seja pela saída da linha como pela
atuação do OEL, o OLTC atua aumentando o tap para absorver mais reativos do sistema
e elevar a tensão da barra 11 para a tensão de referência. Porém, enquanto o OLTC
proporciona o aumento da tensão na barra 11 (Figura 6.4(a)), a tensão nas outras barras
200
136
diminui, como pode-se observar a tensão da barra 8 ilustrada na Figura 6.4(b). A
diminuição da tensão na barra 8 ocorre até o OLTC alcançar o seu tap superior, o que
ocorre um pouco antes de 60 segundos. Observa-se pela Figura 6.4 que as tensões nas
barras de carga variam consideravelmente com o vento após 60 segundos, inclusive com
a presença do gerador DFIG, pois diante de tal cenário operativo crítico, a potência
reativa do DFIG ilustrada na Figura 6.5, atinge seu limite operacional (80 Mvar) após a
retirada da linha, devido a limitação da componente
da corrente do rotor imposta
pelo controle.
0.92
0.96
DFIG
SCIG
DFIG
SCIG
0.95
0.91
Tensão na barra-8 (p.u.)
Tensão na barra-11 (p.u.)
0.94
0.9
Flutuação da tensão
com o vento
ação do OEL
0.89
ação do OLTC
0.88
ação do OEL
0.93
ação do OLTC
0.92
Flutuação da tenão
com o vento
0.91
0.9
0.87
0.89
0.86
0
20
40
60
80
100
120
Tempo (s)
140
160
180
200
0.88
0
20
40
60
80
100
120
Tempo (s)
140
160
180
(b) Barra 8.
(a) Barra 11.
Figura 6.4 Tensões nas barras de carga.
Potência Reativa injetada pelo parque eólico(Mvar)
100
DFIG
SCIG
50
0
-50
-100
-150
0
20
40
60
80
100
120
Tempo (s)
140
160
180
200
Figura 6.5 Potência reativa fornecida/consumida pela barra de geração eólica.
Embora o DFIG fique sem capacidade de regular a tensão diante das variações
de vento observadas após 60 segundos, nota-se que quando o mesmo está em operação,
200
137
ambas as barras de carga mantém tensões mais elevadas em relação ao caso que o SCIG
é usado, devido ao fato do gerador DFIG fornecer potência reativa para o sistema
contribuindo positivamente para a estabilidade, enquanto que o SCIG absorve potência
reativa, após a retirada da linha, contribuindo para uma maior queda de tensão nas
barras.
6.3.2 Aumento de Carga de 20%
Nesta análise considera-se o incremento sucessivo da demanda total do sistema,
desde 1 segundo até 200 segundos, com incrementos de 0,1% em relação a carga inicial
do Cenário 1 a cada segundo. Ao final da simulação, tem-se um aumento de 20% em
relação à carga inicial. O Cenário 1 foi escolhido pois apresenta a condição de operação
mais otimista para o sistema.
A Figura 6.6 apresenta o comportamento das tensões nas barras 8 e 11. Nota-se
que com o aumento da demanda, a tensão diminui fazendo com que o OLTC atue para
manter a tensão na barra 11 próximo à tensão de referência. Porém, enquanto o OLTC
opera para restaurar a tensão na barra 11, a tensão da barra 8 diminui progressivamente,
contribuindo negativamente para a estabilidade de tensão. Por esta razão, a potência
ativa consumida pela carga da barra 11 continua aumentando, enquanto que a potência
ativa consumida pela carga da barra 8 começa a reduzir, como pode ser observado pela
Figura 6.7(a). Isso se deve a dependência da tensão na característica da carga.
1.04
0.92
DFIG
SCIG
0.9
0.89
0.88
DFIG
SCIG
1.02
Tensão na barra-8 (p.u.)
Tensão na barra-11 (p.u.)
0.91
ação do OLTC
0.87
1
0.98
ação do OLTC
0.96
0.94
ação do OEL
0.85
ação do OEL
0.92
0.86
0.9
0
20
40
60
80
100
120
Tempo (s)
140
160
180
200
0
20
40
60
80
100
120
Tempo (s)
(b) Barra 8.
(a) Barra 11.
Figura 6.6 Tensões nas barras de carga.
140
160
180
200
138
A Figura 6.7(b) apresenta o comportamento da corrente de campo do gerador
G3 pela atuação do OEL. Nota-se quando o SCIG está em operação, após 150 segundos
a corrente de campo atinge seu limite máximo e o OEL atua, reduzindo bruscamente a
corrente de campo e a potência reativa fornecida pelo gerador G3, e consequentemente,
as tensões das barras 8 e 11. Quando o DFIG está conectado, a atuação do OEL só
ocorre em 163 segundos. Assim, nota-se que a operação do DFIG no sistema tem efeito
positivo, postergando a atuação do OEL, proporcionando menor risco de intervenção da
proteção de subtensão e a degradação da segurança do sistema.
3800
1.65
1.6
3700
3600
Carga (MW)
3500
Barra-11
ação do OLTC
ação do OEL
3400
Barra-8
3300
3200
Corrente de Campo de G3 (p.u.)
1.55
1.5
1.45
1.4
DFIG
SCIG
1.35
1.3
1.25
DFIG
SCIG
3100
3000
0
20
40
1.2
60
80
100
120
Tempo (s)
140
160
180
200
(a) Carga nas barras 8 e 11.
1.15
0
20
40
60
80
100
120
Tempo (s)
140
160
180
(b) Potência reativa do gerador G3.
Figura 6.7 Efeitos da comutação dos taps do OLTC.
A Figura 6.8 apresentam as curvas PV que mostram o comportamento da tensão
nas barras 11 e 8, a medida que a carga aumenta. Estas curvas foram obtidas por meio
de simulações que consideram a dinâmica dos equipamentos presentes na rede. Através
delas, pode-se obter o ponto de máximo carregamento do sistema, que é a potência
máxima que o sistema pode alcançar. Os resultados mostram que a inserção da geração
eólica contribui positivamente para o aumento do máximo carregamento do sistema.
Quando comparadas as duas tecnologias de geração eólica, nota-se que a máxima
potência transferida aumenta ainda mais quando o DFIG é usado, pois este tipo de
tecnologia possui capacidade de fornecer potência reativa para o sistema, pelo controle
de tensão da máquina. Deve-se destacar que o traçado das curvas PV são irregulares,
pois representam as ações discretas do OEL e do OLTC, as quais não são modeladas
por meio de análise estática (fluxo de carga).
200
139
Devido à capacidade de injeção de potência reativa dos aerogeradores a
velocidade variável proporcionado pelos conversores de eletrônica de potência,
inevitavelmente o DFIG apresentará melhor desempenho do que o SCIG. Por este
motivo, os estudos seguintes são avaliados exclusivamente considerando as tecnologias
de aerogeradores a velocidade variável. É importante destacar que a capacidade de
potência reativa foi considerada invariável com as condições de operação, desprezando
os efeitos dos limites variáveis na capacidade de potência reativa. Todos os casos
seguintes consideram os limites variáveis. É imprescindível considerar os limites
0.92
1.06
0.91
1.04
0.9
1.02
Tensão na barra-8 (p.u.)
Tensão na barra-11 (p.u.)
variáveis para validar a análise dos estudos de estabilidade de tensão de longo-prazo.
0.89
0.88
0.87
0.86
0.85
0.83
6550
6600
6650
6700
6750 6800 6850
Carregamento (MW)
6900
6950
7000
1
0.98
0.96
0.94
0.92
DFIG
SCIG
Sem parque eólico
0.84
DFIG
SCIG
Sem parque eólico
0.9
7050
0.88
6550
(a) Barra 11
6600
6650
6700
6750 6800 6850
Carregamento (MW)
6900
6950
7000
(b) Barra 8
Figura 6.8 Curvas PV.
6.4
Impactos dos Diferentes Modos de Controle do DFIG [75]
O sistema teste usado nesse estudo é o mesmo apresentado na Figura 6.1. Dois
cenários de geração foram considerados. No cenário 1, a carga da barra 8 foi
representada 100% como impedância constante, e a carga da barra 11 foi representada
por 50% corrente constante e 50% impedância constante, tanto para a componente de
potência ativa quanto para a de potência reativa. Já no cenário 2 foi considerada a
modelagem estática e dinâmica das cargas. A componente ativa da carga da barra 8 foi
representa por um equivalente de 450 motores de indução. O parque eólico é composto
de 1420 máquinas de 850 kW. A Tabela 6.2 apresenta os níveis de geração dos dois
cenários.
7050
140
Tabela 6.2 Cenários de geração e controle do DFIG.
Gerador G1
Gerador G2
Gerador G3
DFIG (modo PV)
DFIG (modo PQ)
Cenário 1
2.747 MW
1.736 MW
1.154 MW
1.200 MW - j364 Mvar
1.200 MW + j100 Mvar
Cenário 2
1.115,5 MW
1.736 MW
1.154 MW
1.200 MW - j14,3 Mvar
1.200 MW + j200 Mvar
O estudo foi realizado pela análise dos impactos dos modos de controle do
DFIG: tensão terminal (modo PV) ou fator de potência 0,99 adiantado (modo PQ). Dois
casos foram analisados:
Cenário 1: carga estática;
Cenário 2: carga estática e dinâmica;
As simulações foram executadas considerando um gradativo aumento de carga
de 20%, com incrementos de 0,1% a cada segundo até 200 segundos, encerrando a
simulação em 300 segundos.
6.4.1 Cenário 1: Carga Estática
Conforme a carga aumenta, a tensão na barra 11 diminui, ocasionando a atuação
do OLTC para manter a tensão próxima a referência, em ambos os modos de controle,
como mostra a Figura 6.9. Contudo, enquanto o OLTC melhora o perfil de tensão na
barra 11, a cada operação do tap a tensão da barra 8 é progressivamente degradada e a
potência reativa fornecida pelos geradores síncronos aumenta, principalmente quando o
modo de controle do fator de potência é empregado pela geração eólica, conforme
mostra a Figura 6.10. No modo de controle de tensão, o DFIG mantém o nível de
tensão na barra devido a sua capacidade de fornecimento de potência reativa.
A redução da tensão nas barras 8 e 11 são diretamente refletidas na corrente de
campo do gerador G3. Conforme a carga aumenta, o regulador de tensão do gerador G3
rapidamente restaura a tensão terminal pelo aumento da excitação. Isso resulta em um
fluxo adicional de potência reativa pelas indutâncias dos transformadores e linhas de
transmissão, causando um aumento nas perdas do sistema e quedas de tensão. Nesta
141
situação, o gerador G3 tende a alcançar o limite da corrente de campo com o aumento
de carga, como mostra a Figura 6.11.
0.925
Controle de tensão
Controle do fator de potência
0.92
Tensão na barra-11 (p.u.)
0.915
0.91
0.905
0.9
0.895
0.89
0.885
0.88
0
50
100
150
Tempo (s)
200
250
300
Figura 6.9 Tensão na barra 11.
No Cenário 1, o OEL do gerador G3 é ativado somente quando o DFIG opera
com controle do fator de potência, reduzindo a margem estabilidade de tensão de longoprazo. Por outro lado, como pode ser visto na Figura 6.11, o modo controle de tensão
do DFIG evita a atuação do OEL, apesar da corrente de campo do gerador G3 ser maior
nos 110 segundos iniciais. Como consequência o controle de tensão oferece menores
riscos de intervenção da proteção e degradação da segurança do sistema de potência.
1.1
1.6
1.5
Corrente de campo de G3 (p.u.)
Tensão na barra-8 (p.u.)
Controle da tensão
Controle do fator de potência
1.05
1
1.4
atuação do OEL
1.3
1.2
1.1
Controle de tensão
Controle do fator de potência
1
0.95
0
50
100
150
Tempo (s)
200
Figura 6.10 Tensão na barra 8.
250
300
0.9
0
50
100
150
Tempo (s)
200
250
Figura 6.11 Corrente de campo em G3.
A Figura 6.12 mostra o comportamento do OLTC durante o aumento de carga.
O OLTC atinge o seu limite superior quando os aerogeradores são configurados para
300
142
operarem com controle do fator de potência, e neste caso o DFIG não consegue fornecer
potência reativa para manter as tensões no sistema. A situação torna-se mais crítica a
cada mudança de tap, porque a potência reativa injetada pelos geradores síncronos tende
a alcançar o seu limite, levando a perda do controle de tensão. Por outro lado, quando o
modo de controle de tensão é empregado, o OLTC não atinge o seu tap superior,
aumentando a margem de estabilidade de tensão de longo-prazo.
A Figura 6.13 mostra que conforme a carga aumenta, quando o DFIG opera
com controle de tensão, este reduz imediatamente a potência reativa consumida,
injetando potência reativa no sistema, continuamente até 187 segundos quando atinge o
limite máximo de potência reativa. O modo de controle de tensão melhora o balanço de
potência reativa fornecida e consumida no sistema de potência.
1.15
Potência Reativa injetada pelo DFIG (Mvar)
800
Tap (p.u.)
1.1
1.05
1
0.95
Controle de tensão
Controle do fator de potência
0.9
0
50
100
150
Tempo (s)
200
250
Figura 6.12 Posição do tap.
300
controle de tensão
600
400
200
controle do fator de potência
0
-200
-400
-600
0
50
100
150
Tempo (s)
200
250
Figura 6.13 Potência reativa do DFIG.
A Figura 6.14 mostra a curva PV da barra 8 quando o DFIG opera com controle
do fator de potência ou tensão terminal. Estas curvas foram obtidas pelo aumento da
carga e plotando a tensão na barra 8 considerando os aspectos dinâmicos dos
eequipamentos do sistema. Esta curva indica que o ponto de máximo carregamento
(“nariz” da curva), o qual é a máxima potência que o sistema pode fornecer, aumenta
significativamente quando o DFIG opera com controle de tensão. É importante destacar
que os contornos das curvas PV são irregulares sendo que elas representam a atuação
discreta dos equipamentos OEL e OLTC.
300
143
1.1
Tensão na barra-8 (p.u.)
Controle de tensão
Controle do fator de potência
1.05
1
0.95
6600
6800
7000
7200
7400
Carregamento (MW)
7600
7800
Figura 6.14 Curva PV da barra 8.
6.4.2 Cenário 2: Carga Estática e Dinâmica
Como pode ser visto nas figuras 6.15 e 6.16, a operação do DFIG com controle
do fator de potência resulta no colapso de tensão do sistema, ocasionada pela ação
combinada do OEL e OLTC. Neste caso, a estratégia de controle do fator de potência
degrada a margem de estabilidade de tensão de longo-prazo do sistema de potência.
1
1.05
0.95
1
Tensão na barra-8 (p.u.)
Tensão na barra-11 (p.u.)
0.95
0.9
0.85
0.8
Controle de tensão
Controle do fator de potência
0.75
0.85
0.8
Controle de tensão
Controle do fator de potência
0.75
0.7
0.65
0.9
0.7
0.65
0
50
100
150
Tempo (s)
200
Figura 6.15 Tensão na barra 11.
250
300
0
50
100
150
Tempo (s)
200
250
Figura 6.16 Tensão na barra 8.
A Figura 6.17 mostra o comportamento da corrente de campo do gerador G3. O
controle do fator de potência aumenta a demanda da corrente de campo e o OEL opera
em 160 segundos reduzindo a corrente de campo, e consequentemente, a potência
reativa injetada pelo gerador G3 diminui. Por outro lado, quando o DFIG opera com
controle de tensão o OEL é ativado somente em 240 segundos, aumentando a margem
300
144
de estabilidade de tensão. O controle de tensão do DFIG demonstra que pode ser
utilizado para melhorar a estabilidade de tensão de longo-prazo em um sistema de
potência com alto nível de penetração eólica. Pode-se concluir que o controle de tensão
do DFIG tem um efeito positivo na estabilidade de tensão quando o sistema de potência
é submetido a um gradual aumento de carga, considerando os aspectos dinâmicos
combinados do OLTC e OEL em conjunto com a característica da carga. É importante
destacar que a característica da carga e os equipamentos usados no controle de tensão do
sistema de potência estão entre os principais fatores que afetam a estabilidade de tensão.
A Figura 6.18 mostra o comportamento do OLTC durante o aumento de carga.
Observe que o OLTC encontra-se na posição de tap mínimo quando o DFIG opera com
controle do fator de potência, e a priori as perdas reativas nas linhas de transmissão são
menores em relação ao caso do controle de tensão. Contudo, durante a dinâmica o
OLTC efetua várias mudanças de tap em sequência até atingir o tap superior,
aumentando o consumo de potência reativa a cada mudança de tap, o que ocasiona a
atuação precoce do OEL conforme visto na Figura 6.17, e aumenta o risco de
instabilidade de tensão. Isso se deve ao fato de que a potência reativa fornecida pelo
DFIG não aumenta conforme a demanda. Esta é a grande desvantagem do controle do
fator de potência. Por outro lado, o controle de tensão retarda a atuação do OLTC.
Quando o OLTC não efetua mudanças na posição do tap, a potência reativa absorvida
aumenta pouco, assim como as perdas nas linhas de transmissão, causando apenas uma
pequena queda nas tensões. Neste caso, o sistema de potência esta muito mais apto a
manter a estabilidade de tensão.
1.12
1.8
1.1
1.7
1.6
1.06
1.5
Tap (p.u.)
Corrente de campo de G3 (p.u.)
1.08
1.4
1.04
1.02
1
0.98
1.3
1.1
0
50
100
150
Tempo (s)
200
250
Figura 6.17 Corrente de campo do gerador G3.
Controle de tensão
Controle do fator de potência
0.96
Controle de tensão
Controle do fator de potência
1.2
0.94
300
0.92
0
50
100
150
Tempo (s)
200
Figura 6.18 Posição do tap.
250
300
145
O controle da tensão terminal pelo DFIG baseado no controle da corrente do
rotor permite a manutenção da potência reativa consumida pelos motores como mostra a
Figura 6.19. Neste caso, não existe necessidade de compensação extra de potência
reativa para manutenção da estabilidade de tensão de longo-prazo do sistema de
potência. Por outro lado, o controle do fator de potência causa um aumento na potência
reativa drenada pelos motores, necessitando de compensação adicional para evitar o
colapso de tensão provocado pelo estol dos motores.
A Figura 6.20 mostra a curva PV da barra 8 para ambos os modos de controle.
Os resultados mostram que o controle de tensão aumenta o ponto de máximo
carregamento, uma vez que este modo de controle pode fornecer suporte de potência
reativa ao sistema de potência. As simulações indicam que o controle de tensão do
DFIG representa um benefício para o sistema, aumentando a margem de estabilidade de
tensão do sistema de potência. Indiscutivelmente, o suporte potência reativa por parte do
controle da tensão terminal é decisivo para a estabilidade de tensão e os estudos
seguintes foram realizados considerando somente o modo de controle da tensão
2400
1.05
2200
1
0.95
2000
Controle de tensão
Controle do fator de potência
Tensão na barra-8 (p.u.)
Potência Reativa absorvida pelos motores (Mvar)
terminal, tanto para o DFIG quanto o FRC.
1800
1600
1400
0.9
0.85
0.8
0.75
Controle de tensão
Controle do fator de potência
1200
0.7
1000
0
50
100
150
Tempo (s)
200
250
Figura 6.19 Potência reativa absorvida pelos
300
0.65
4400
4600
4800
5000
5200
5400
Carregamento (MW)
5600
5800
Figura 6.20 Curva PV na barra 8.
motores.
6.5
Contribuição de Aerogeradores a Velocidade Variável para Suporte de
Potência Reativa [76]
Para fins do estudo pretendido, foram realizadas modificações no sistema teste
apresentado, transferindo o gerador síncrono G2 (com OEL instalado) para a barra 3 e o
parque eólico para a barra 2, excluindo a barra 12, conforme a Figura 6.21. O estudo é
6000
146
conduzido substituindo a cada simulação o DFIG, FRC e gerador síncrono com OEL na
barra 2, todos com mesma capacidade de geração. Os aerogeradores DFIG e FRC
operam controlando a tensão terminal, pois este modo de controle é mais efetivo para a
estabilidade de tensão. Nesse estudo a capacidade do inversor do FRC é igual a 1 MVA.
O parque eólico é composto por um gerador equivalente de 1.324 turbinas de 850 kW
com níveis de geração 1.000 MW e 425 MW para regimes de velocidades de vento alta
e baixa, respectivamente, conforme a Figura 6.22. O sistema encontra-se operando no
cenário de carga leve segundo [49].
6
1
T1
7
T3
G2 (1736 MW)
5
G1
T4
Barra de
Referência
3
2
8
T2
T5
9
10 OLTC 11
Parque
Eólico
Figura 6.21 Sistema teste modificado com parque eólico transferido para a barra 2.
18
Velocidade do Vento (m/s)
16
14
12
10
Alta Velocidade
Baixa Velocidade
8
6
4
2
0
50
100
150
Tempo (seg)
200
250
300
Figura 6.22 Regimes de vento com velocidades altas e baixas.
A carga estática da barra 8 foi representada 100% impedância constante para as
componentes ativa e reativa, enquanto a carga da barra 11 foi representada por 50%
corrente constante e 50% impedância constante, para ambas componentes ativa e
reativa.
147
O estudo foi desenvolvido para mostrar como o DFIG e FRC contribuem para a
estabilidade de tensão de longo-prazo. Com este objetivo, simulações foram executadas
para os regimes de alta e baixa velocidade do vento com incrementos de 0,1% a cada
segundo até 200 segundos, totalizando um aumento de carga de 20%, encerrando a
simulação em 300 segundos. Neste sentido, o comportamento dinâmico do sistema é
investigado quando o gerador síncrono convencional, DFIG e FRC são alternadamente
conectados na barra 2.
As figuras 6.23 e 6.24 apresentam o comportamento da tensão na barra 8
considerando condições de alta e baixas velocidades do vento, respectivamente.
Observa-se que a tensão na barra 8 diminui menos quando o FRC é conectado, para
condições de baixas velocidades de vento. Conforme a demanda aumenta, o OLTC
opera para manter a tensão na barra 11, depreciando progressivamente a tensão na barra
8. Para cada movimento do tap, a potência reativa injetada pelos geradores aumenta
gradualmente, até o gerador convencional e os aerogeradores alcançarem seus limites,
perdendo o controle automático de tensão sob a barra terminal.
1.06
1.06
DFIG
FRC
Maq.Síncrona
1.04
1.02
Tensão na Barra-8 (p.u.)
1.02
Tensão na Barra-8 (p.u.)
DFIG
FRC
Maq. Síncrona
1.04
1
0.98
0.96
0.94
1
0.98
0.96
0.94
0.92
0.92
0.9
0.9
0.88
0.88
0
50
100
150
Tempo (seg)
200
250
300
0
50
100
150
Tempo (seg)
200
250
Figura 6.23 Tensão na barra 8 durante
Figura 6.24 Tensão na barra 8 durante
condições de altas velocidades de vento.
condições de baixas velocidades de vento.
As figuras 6.25 e 6.26 mostram a potência reativa injetada pelo DFIG e o seu
limite de potência reativa para condições de alta e baixa velocidade, respectivamente.
Note que no início da simulação, o DFIG ainda tem margem para injetar potência
reativa na rede. Contudo, com o aumento progressivo da carga, o limite de potência
reativa do DFIG é atingido. Este efeito é mais pronunciado nas altas velocidades, sendo
que o aumento da velocidade do vento diminui as reservas de potência reativa do DFIG.
Na condição de alta velocidade do vento, a demanda de potência reativa pode exceder o
300
148
limite de potência reativa do DFIG, o qual é definido pela corrente nominal do
conversor RSC. O controle não permite que a corrente do rotor ultrapasse o valor
nominal do conversor para que este não seja danificado. Mas, ao atingir o limite de
potência reativa a tensão terminal perde controlabilidade e não pode ser mais mantida
constante, aumentando o risco de instabilidade de tensão.
900
800
Qdfig
Qmax
700
800
Qdfig
Qmax
Potência Reativa (Mvar)
Potência Reativa (Mvar)
600
500
400
300
200
700
600
500
100
400
0
-100
300
0
50
100
150
Tempo (seg)
200
250
300
0
50
100
150
Tempo (seg)
200
250
300
Figura 6.25 Potência reativa injetada pelo
Figura 6.26 Potência reativa injetada pelo
DFIG durante condições de altas velocidades de
DFIG durante condições de baixas velocidades
vento.
de vento.
Claramente pode ser observado que o limite de potência reativa do FRC é
superior ao limite do DFIG, conforme mostra a Figura 6.27. Quando o DFIG esta
conectado, a potência reativa alcança o seu limite antes dos 100 segundos, enquanto que
o limite de potência reativa do FRC é atingido em aproximadamente 190 segundos,
ocasionando menores riscos de intervenção da proteção e degradação da segurança do
sistema.
A Figura 6.28 fornece uma comparação direta da potência reativa injetada pelo
DFIG, FRC e o gerador síncrono, todos conectados alternadamente na barra 2, durante
as condições de baixas velocidades de ventos. Como pode ser observado o OEL do
gerador síncrono começa a reduzir a potência reativa próximo aos 190 segundos. Neste
caso, a demanda de potência reativa será transferida para os outros geradores,
sobrecarregando o gerador síncrono G2 localizado na barra 3.
A Figura 6.29 mostra a curva PV da barra 8 nas condições de baixas
velocidades do vento. Estas curvas foram obtidas plotando a cada ponto a tensão da
barra 8 e o carregamento do sistema, considerando toda a dinâmica envolvida no
processo. Estas curvas indicam o ponto de máximo carregamento do sistema, os quais
149
referem-se a maior demanda que o sistema pode atender. Os resultados mostram que o
FRC e o gerador síncrono contribuem similarmente para o aumento do ponto de
máximo carregamento do sistema, quando comparado ao DFIG. Um indicador muito
comum da margem de estabilidade de tensão é o “nariz” da curva PV, o qual é definido
como o ponto de máximo carregamento do sistema. Contudo, a ponta do “nariz” da
curva PV não corresponde ao ponto de instabilidade de tensão, exceto para cargas do
tipo potência constante, ou seja, a instabilidade normalmente ocorre depois da ponta do
nariz e mais longe será quanto maior a porção de carga do tipo impedância constante.
1400
1400
1300
atuação do OEL
Qfrc
Qmax
1200
1100
Potência Reativa (Mvar)
Potência Reativa (Mvar)
1200
1000
900
800
700
1000
800
DFIG
FRC
Maq.Síncrona
600
600
400
500
400
0
50
100
150
Tempo (seg)
200
250
300
200
0
50
100
150
Tempo (seg)
200
250
Figura 6.27 Potência reativa injetada pelo FRC
Figura 6.28 Potência reativa injetada na barra 2
durante condições de baixas velocidades dos
durante condições de baixas velocidades dos
ventos.
ventos.
1.04
DFIG
FRC
Maq.Síncrona
Tensão na Barra-8 (p.u.)
1.02
1
0.98
0.96
0.94
0.92
0.9
6650
6700
6750
6800
6850
6900
Carregamento do Sistema (MW)
6950
7000
Figura 6.29 Curva PV da barra 8 obtida nas condições de baixas velocidade de vento.
300
150
É importante mencionar que o traçado da curva PV é irregular devido a atuação
discreta do OLTC e OEL, os quais não são modelados na análise estática. A grande
contribuição no balanço de potência reativa do sistema deve-se ao FRC, quando
comparado ao gerador síncrono e principalmente ao DFIG, diminuindo a demanda de
potência reativa sobre os outros geradores do sistema, postergando a atuação do OEL no
gerador G2, proporcionando ao operador de sistema mais alternativas para reduzir o
risco de colapso de tensão.
Até o momento, todos os estudos apresentados consideraram a capacidade do
DFIG somente com suporte de potência reativa pelo RSC. Devido a maior capacidade
do inversor do FRC, pode-se levar a crer que o FRC oferece um suporte melhor de
potência reativa do que o DFIG. Contudo, a contribuição do GSC é decisiva para a
preservação da estabilidade de tensão, conforme será apresentado no estudo seguinte.
6.6
Contribuição do GSC para a Estabilidade de Tensão de Longo-Prazo [77]
Assim como o estudo anterior, este caso analisa apenas os aerogeradores a
velocidade variável operando com controle de tensão:
DFIG (RSC): o suporte de potência reativa é fornecido exclusivamente pelo
RSC, enquanto o GSC opera com fator de potência unitário;
DFIG (RSC+GSC): o suporte de potência reativa é fornecido por ambos os
conversores, sendo que o GSC entra em operação quando a tensão terminal do
DFIG está abaixo de 0,90 p.u., permanecendo ligado caso não haja intervenção
do operador;
FRC: gerador síncrono bobinado com conversores de mesma capacidade do
gerador (895 kVA);
Três diferentes cenários de geração eólica são considerados para o sistema da
Figura 6.1. A cada nível de geração eólica é associado um nível de penetração
definido como a relação entre a capacidade eólica total instalada e a geração total.
151
A Tabela 6.3 apresenta os níveis de penetração estudados. Para cada nível de
penetração a quantidade de máquinas que compõe o parque eólico é aumentada de
modo que a velocidade inicial do vento seja a mesma dada pela Figura 6.2. Este
procedimento foi adotado para garantir que os aerogeradores DFIG e FRC iniciem a
simulação no mesmo ponto de operação de modo a realizar um estudo comparativo
coerente entre as tecnologias.
A parcela ativa da carga da barra 8 foi representada por um equivalente de 450
motores de indução, enquanto a componente reativa foi representada 100% como
impedância constante. A carga da barra 11 foi representada por 50% corrente constante
e 50% impedância constante, tanto para a componente de potência ativa quanto para a
de potência reativa. As simulações foram executadas considerando um gradativo
aumento de carga de 20%, com incrementos de 0,1% a cada segundo até 200 segundos,
encerrando a simulação em 300 segundos.
Tabela 6.3 Níveis de penetração eólica.
Nível de Penetração
11,5%
15,3%
19,1%
Eólica (MW)
600
800
1.000
G1(MW) G2(MW) G3(MW)
1.716,3
1.736
1.154
1.519,8
1.736
1.154
1.322,9
1.736
1.154
6.6.1 Impacto do Nível de Penetração Eólica
Nesta seção, os comportamentos do DFIG e FRC serão analisados considerando
os três níveis de penetração apresentados na Tabela 6.3. A Figura 6.30 apresenta os
limites de potência reativa para todas as tecnologias e todos os níveis de penetração. Os
resultados mostram que conforme a penetração eólica aumenta, o limite de potência
reativa também aumenta, melhorando a estabilidade de tensão do sistema de potência.
A Figura 6.31 mostra o comportamento da tensão na barra 8 para todas as
tecnologias e níveis de penetração. O cenário mais crítico é o caso de menor nível de
penetração, no qual o sistema de potência é instável para todas as tecnologias. Para o
nível de penetração intermediário (15,3%), somente o DFIG(RSC+GSC) permanece
152
estável. Conforme a penetração eólica aumenta, todas as tecnologias convergem para
um cenário de operação estável.
O limite de potência reativa varia de uma tecnologia para outra devido as
características dos aerogeradores, para um mesmo nível de penetração. A Figura 6.32
apresenta o limite de potência reativa para todas as tecnologias considerando o nível de
penetração de 15,3%. Está claro que o suporte de potência reativa do DFIG aumenta
quando o GSC entra em operação. Note que, para este cenário, somente quando DFIG
(RSC+GSC) esta conectado o sistema não entra em colapso. Observe que o FRC
apresenta maior capacidade de potência reativa durante todo o tempo (exceto quando o
GSC entra em operação), mesmo assim não consegue evitar o colapso de tensão devido
ao processo de restauração da carga, o qual será explicado na próxima seção. Os
resultados a seguir serão apresentados considerando o nível de penetração intermediário
(15,3%), o qual detalha o mecanismo de instabilidade de tensão e destaca a contribuição
do GSC para a preservação da estabilidade de tensão de longo-prazo.
DFIG(RSC)
PL = 11.5%
PL = 15.3%
Tensão na barra-8 (p.u.)
Potência Reativa (Mvar)
DFIG(RSC)
1500
PL = 19.1%
1000
500
0
0
50
100
150
200
250
300
1
0.9
0.8
0.7
PL = 11.5%
0.6
0
50
100
PL = 15.3%
150
PL = 19.1%
200
250
300
DFIG(RSC+GSC)
PL = 11.5%
PL = 15.3%
PL = 19.1%
1000
500
0
0
50
100
150
200
250
300
Tensão na barra-8 (p.u.)
Potência Reativa (Mvar)
DFIG(RSC+GSC)
1500
1
0.9
0.8
0.7
0.6
PL = 11.5%
0
50
PL = 15.3%
100
1500
PL = 11.5%
PL = 15.3%
PL = 19.1%
1000
500
0
0
50
100
150
Tempo (s)
150
200
250
300
FRC
Tensão na barra-8 (p.u.)
Potência Reativa (Mvar)
FRC
PL = 19.1%
200
250
300
1
0.8
0.6
PL = 11.5%
0
50
PL = 15.3%
100
150
Tempo (s)
PL = 19.1%
200
250
Figura 6.30 Limite de potência reativa para
Figura 6.31 Tensão na barra 8 para todos os
todos os níveis de penetração.
níveis de penetração.
300
153
1000
DFIG(RSC)
FRC
DFIG(RSC+GSC)
Limite de Potência Reativa (Mvar)
900
800
700
600
500
400
300
200
100
0
0
50
100
150
Tempo (s)
200
250
300
Figura 6.32 Limite de potência reativa para todas as tecnologias com
.
6.6.2 Nível de Penetração Intermediário (15,3%)
Nesta seção, o comportamento do DFIG(RSC), DFIG(RSC+GSC) e FRC são
analisados em maiores detalhes considerando somente o nível de penetração de 15,3%.
A Figura 6.33 apresenta o comportamento da tensão na barra 8 considerando
todas as tecnologias. Observe que todos aerogeradores iniciam no mesmo ponto de
operação. Contudo, conforme a carga aumenta, as diferenças entre eles tornan-se mais
evidentes. O sistema permance estável quando o DFIG(RSC+GSC) está em operação. O
sistema torna-se instável para todos os outros casos, e o perfil de tensão diminui mais
rapidamente quando o DFIG(RSC) é conectado, ou seja, o GSC opera com fator de
potência unitário não fornecendo potência reativa para o sistema de potência.
Note que o DFIG (RSC) e DFIG (RSC+GSC) apresentam o mesmo
comportamento até a tensão cair abaixo de 0,9 p.u, pois o GSC entra em operação
somente quando a tensão terminal do DFIG é menor do que 0,9 p.u.
A Figura 6.34 mostra a atuação do OLTC, o qual tenta restaurar o nível de
tensão na barra 11, e progressivamente degrada a tensão na barra 8. A cada mudança de
tap, a potência reativa injetada pelos geradores síncronos aumenta gradualmente, até
que os geradores síncronos e aerogeradores atinjam seus limites de potência reativa,
levando a perda do controle de tensão. Pode ser visto que o OLTC atinge seu tap
superior primeiramente quando o DFIG é usado, impondo uma alta taxa de mudança de
tap. Em seguida, o OEL opera reduzindo a potência reativa injetada pelo gerador 3,
154
como mostra a Figura 6.35. Quando o DFIG é conectado o OEL atua em 206 segundos.
Quando o FRC é conectado, o OEL atua atrasado, em 254 segundos. Logo, o FRC tem
um efeito positivo no sistema sendo que este retarda a operação do OEL quando
comparado com os outros casos, oferecendo a priori menores riscos de intervenção da
proteção e degradação na segurança do sistema de potência.
1.05
1.12
1
1.1
1.08
1.06
0.9
Tap (p.u.)
Tensão na barra-8 (p.u.)
0.95
0.85
1.04
1.02
0.8
1
0.75
DFIG (RSC)
FRC
DFIG (RSC+GSC)
0.7
0.65
0.98
0.94
0
50
100
150
Tempo (s)
200
DFIG (RSC)
FRC
DFIG (RSC+GSC)
0.96
250
300
0
Figura 6.33 Tensão na barra 8.
50
100
150
Tempo (s)
200
250
Figura 6.34 Evolução do tap.
A Figura 6.36 mostra a potência reativa injetada/absorvida pelo DFIG e FRC e
suas capacidades máximas quando o GSC do DFIG está operando com fator de potência
unitário. Note que, no início da simulação o DFIG ainda tem reserva de potência reativa
para injetar na rede. Conforme a carga aumenta, ele atinge o seu limite de potência
reativa. Além disso, o regime de ventos torna-se desfavorável quando o sistema de
potência está estressado. De acordo com a curva de capacidade do DFIG apresentada no
Capítulo 5 (veja Figura 5.9), altas velocidades de ventos implica baixa capacidade de
injeção de potência reativa. Como consequência, o DFIG perde o controle da tensão
terminal. Devido à alta capacidade dos conversores do FRC, o seu limite de potência
reativa é estendido quando comparado ao DFIG(RSC).
A Figura 6.37 mostra a potência ativa produzida pelos aerogeradores. Observe
que a potência ativa aumenta/diminui conforme a variação do vento dada na Figura 6.2.
Quando a velocidade do vento é menor do que a velocidade nominal da turbina (veja a
curva de potência no Anexo), o ângulo de passo
diminui (veja Figura 6.38), para
otimizar o aproveitamento eólico maximizando o coeficiente de potência
mostra a Figura 6.39.
, conforme
300
155
A Figura 6.40 mostra a potência reativa injetada pelo DFIG e a sua capacidade
máxima quando o GSC está controlando a potência reativa. Esta figura também mostra
a potência reativa do DFIG injetada no estator e pelo GSC. Quando a tensão terminal do
DFIG torna-se menor do que 0,90 p.u., o que ocorre próximo de 250 segundos, o GSC
injeta potência reativa tentando restaurar a tensão terminal (veja a parte inferior da
Figura 6.40). O sistema permanece estável devido a potência reativa injetada pelo GSC.
Esse resultado mostra a importante contribuição do GSC para manter a estabilidade de
tensão do sistema de potência.
DFIG (RSC)
DFIG (RSC)
FRC
DFIG (RSC+GSC)
1.55
1.5
1.45
1.4
800
600
400
200
0
-200
-400
QDFIG
0
50
100
254 seg.
1.3
1.25
206 seg.
1.2
1.15
150
200
QDFIGmax
250
300
FRC
1.35
Potência Reativa (Mvar)
Corrente de campo de G3 (p.u.)
Potência Reativa (Mvar)
1.6
0
50
100
150
Tempo (s)
200
250
800
600
400
200
0
QFRC
-200
-400
300
0
50
100
150
Tempo (s)
200
QFRCmax
250
300
Figura 6.36 Potência reativa injetada pelo
Figura 6.35 Corrente de campo do gerador G3.
DFIG(RSC) e FRC, e os seus limites de
potência reativa.
900
20
DFIG (RSC)
FRC
DFIG (RSC+GSC)
18
800
16
14
600
Beta (graus)
Potência Ativa (MW)
700
500
400
12
10
8
6
300
DFIG (RSC)
FRC
DFIG (RSC+GSC)
200
100
0
50
100
150
Tempo (s)
200
250
4
2
300
Figura 6.37 Potência ativa produzida pelos
aerogeradores.
0
0
50
100
150
Tempo (s)
200
Figura 6.38 Ângulo de passo.
250
300
156
Potência Reativa (Mvar)
0.5
0.45
0.4
0.35
QLIM
tot
600
QDFIG
400
200
0
-200
0
50
100
150
200
250
300
250
300
0.25
Potência Reativa (Mvar)
Cp
0.3
800
0.2
0.15
0.1
DFIG (RSC)
FRC
DFIG (RSC+GSC)
0.05
0
0
50
100
150
Tempo(s)
200
250
800
Qtot
600
Qs
QGSC
400
200
GSC
0
-200
0
50
300
100
150
Tempo (s)
200
Figura 6.40 Potência reativa injetada pelo
Figura 6.39 Coeficiente de potência.
DFIG (RSC+GSC).
Quando o GSC do DFIG está fornecendo potência reativa, a demanda de
potência reativa dos motores de indução é mantida, como mostra a Figura 6.41. Por
outro lado, a operação de outros tipos de aerogeradores, causa um aumento na potência
reativa drenada pelos motores, necessária para manter o balanço de potência reativa do
sistema. Neste caso, o motor é sujeito a um súbito estol que causa um colapso de tensão
manifestado como a queda imediata da tensão em todas as barras do sistema.
A Figura 6.42 mostra a curva PV da barra 8 considerando os aspectos
dinâmicos do OEL e OLTC. Esta curva indica o ponto de máximo carregamento
(“nariz” da curva PV), o qual é a máxima potência que o sistema pode transferir a carga.
As ações antecipadas do OEL e OLTC claramente diminuem o “nariz” quando usando o
DFIG, mesmo com o GSC operando, indicando a priori que o FRC fornece um aumento
na margem de estabilidade de tensão.
1
DFIG (RSC)
FRC
DFIG (RSC+GSC)
2000
0.95
Tensão na barra-8 (p.u.)
Potência Reativa absorvida pelos motores (Mvar)
2200
1800
1600
1400
1200
1000
0.9
0.85
0.8
0
50
100
150
Tempo (s)
200
250
Figura 6.41 Potência reativa absorvida pelos
motores de indução.
300
DFIG (RSC)
FRC
DFIG (RSC+GSC)
0.75
5000 5100 5200 5300 5400 5500 5600 5700 5800 5900 6000 6100
Carregamento (MW)
Figura 6.42 Curva PV da barra 8.
157
A Figura 6.43 mostra o carregamento do sistema indicando quando o
carregamento máximo ocorre para cada tecnologia de aerogerador. Note que após 200
segundos, apesar do aumento de carga ser finalizado, a carga do sistema continua
aumentando quando o FRC está operando, porque a carga é restaurada pela injeção de
potência reativa do FRC. Contudo, este processo de restauração da carga leva a atuação
do OEL conduzindo o sistema de potência ao colapso de tensão.
A ação do OEL degrada a injeção de potência reativa, a qual coincide com o
máximo carregamento do sistema. Depois da ação do OEL, a tensão e o carregamento
caem em todas as barras levando ao colapso de tensão, exceto para o caso do DFIG
(GSC+RSC) quando o GSC é ativado em 250 segundos, tornando-se uma fonte de
potência reativa suplementar em defesa contra a instabilidade de tensão da carga. A
influência adicional de potência reativa pelo GSC é muito importante para a prevenção
do colapso de tensão quando comparado aos casos do DFIG (RSC) e FRC.
FRC Carga Máxima
6200
6000
Carregamento (MW)
5800
5600
DFIG(RSC)
Carga Máxima
5400
DFIG(RSC+GSC)
Carga Máxima
5200
5000
DFIG (RSC)
FRC
DFIG (RSC+GSC)
4800
4600
4400
0
50
100
150
Tempo (s)
200
250
300
Figura 6.43 Carregamento do sistema.
6.7
Conclusões
Graças aos conversores de eletrônica de potência, os aerogeradores a velocidade
constante são superados pelos aerogeradores a velocidade variável, os quais podem
fornecer potência reativa ao sistema de potência para aumentar a margem de
estabilidade de tensão, oferecendo menos riscos de intervenção da proteção e
degradação da segurança. Contudo, é importante quantificar com precisão a capacidade
de potência reativa dos aerogeradores a velocidade variável para não cometer erros a
respeito da estabilidade do sistema de potência.
158
Apesar da influência da representação do eixo mecânico pelo modelo duas
massas na estabilidade do sistema de potência no longo-prazo, as causas da
instabilidade não são de natureza da estabilidade de tensão. Adotar o modelo massa
global não modifica as conclusões a respeito do estudo da estabilidade de tensão de
longo-prazo, pressupondo-se que as oscilações de baixa frequência sejam amortecidas
por estabilizadores de sistemas de potência.
O controle da tensão terminal é fundamental para aumentar a margem de
estabilidade de tensão. O controle do fator de potência pode levar o sistema de potência
a instabilidade quando o nível de penetração da geração é elevado no sistema de
potência.
Desprezar os efeitos dos limites variáveis é uma premissa muito otimista a
respeito da margem de estabilidade de tensão de longo-prazo do sistema de potência. De
fato, os limites de potência reativa se modificam com as condições de operação do
sistema e do próprio aerogerador, pois dependem das condições de vento do local. Altas
velocidades de ventos diminuem as reservas de potência reativa do aerogerador,
enquanto que nas baixas velocidades de ventos, as reservas de potência reativa são
expandidas e o aerogerador pode fornecer um suporte adequado ao controle de tensão,
comportando-se similarmente como um compensador síncrono.
Por fim, a contribuição do GSC é decisiva para preservar a estabilidade de
tensão do sistema de potência. A injeção de potência reativa pelo GSC é uma medida
corretiva para a estabilidade de tensão, pois evita o colapso causado pela atuação do
OEL ou pelo processo de restauração da carga.
159
Capítulo 7
Conclusões Finais e Trabalhos Futuros
7.1
Considerações Finais
Neste capítulo primeiramente são apresentadas às conclusões relativas a cada estudo de
caso apresentado no Capítulo 6 e em seguida são dadas as conclusões finais englobando
todas as contribuições a respeito da integração de aerogeradores para a estabilidade de
tensão de longo-prazo em sistemas elétricos de potência. Conforme informado no
capítulo anterior, todas as simulações foram realizadas com os softwares ANAREDE e
ANATEM, considerando a modelagem dinâmica dos aerogeradores (SCIG, DFIG e
FRC), bem como dos principais componentes que influenciam a estabilidade de tensão
de longo-prazo, tais como: OLTC, OEL e o motor de indução.
Ao final do capítulo, trabalhos futuros são sugeridos de forma a dar continuidade
ao trabalho apresentado, enfocando outros temas a serem explorados dentro da
estabilidade de tensão de longo-prazo envolvendo aerogeradores a velocidade variável.
7.2
Integração de Aerogeradores SCIG e DFIG
Os resultados mostraram que os aerogeradores DFIG apresentam melhor
desempenho em relação aos aerogeradores SCIG, quanto à tendência de impacto
positivo para a estabilidade de tensão de longo-prazo, aumentando o máximo
carregamento do sistema, reduzindo perdas de potência reativa e retardando o instante
de atuação do OEL. Estes benefícios são alcançados à custa dos conversores de
eletrônica de potência instalados nos aerogeradores a velocidade variável, conferindo
controlabilidade para a potência ativa e reativa, oferecendo um suporte melhor de tensão
em relação aos aerogeradores a velocidade constante.
160
Os aerogeradores SCIG não oferecem suporte nenhum ao controle de tensão,
pelo contrário, sempre absorvem potência reativa, especialmente sob escorregamento
elevado. O banco de capacitores instalado nos terminais do parque eólico é uma fonte
passiva de potência reativa com regulação pobre de tensão sob elevados níveis de
compensação. A potência reativa fornecida pelo banco de capacitores depende do
quadrado da tensão, ou seja, uma pequena variação na tensão compromete a potência
reativa fornecida pelo banco, podendo levar o sistema de potência ao colapso de tensão
quando o mesmo está sob elevados níveis de compensação.
7.3
Modos de Controle: Fator de Potência ou Tensão Terminal
Os resultados mostraram que o controle do fator de potência é fraco para a
margem de estabilidade de tensão, principalmente quando as reservas de potência
reativa são insuficientes e também quando o motor de indução é usado para representar
parte da carga. O controle de tensão é mais robusto do que o controle do fator de
potência, aumentando o carregamento máximo do sistema de potência e retardando a
atuação do OLTC e OEL, diminuindo os riscos de intervenção da proteção e prevenindo
o sistema de potência contra o colapso de tensão.
A robustez do controle de tensão se deve ao melhor aproveitamento das reservas
de potência reativa em relação ao controle do fator de potência, o qual possui uma
reserva bastante restrita conforme aumenta o fator de potência. No controle do fator de
potência, a potência reativa varia conforme a potência ativa injetada pelo DFIG, ao
passo que no controle de tensão a potência reativa injetada no sistema aumenta
conforme a necessidade da demanda, fazendo com que a tensão da carga local
permaneça constante, pelo menos até o limite de potência reativa não ser atingido.
O controle de tensão, como parte dos serviços ancilares, direcionou o mercado
de fabricantes de aerogeradores para os sistemas a velocidade variável, devido ao
suporte qualificado de potência reativa.
7.4
Contribuição de Aerogeradores para o Suporte de Potência Reativa
Este estudo mostra que os aerogeradores a velocidade variável tem um impacto
mais positivo para a estabilidade de tensão de longo-prazo nas condições de baixas
velocidades do que nas condições de altas velocidades. Os resultados claramente
161
mostram que o FRC aumenta a margem de estabilidade de tensão, quando o sistema de
potência é submetido a um lento aumento de carga, levando a um processo em cadeia de
subsequentes atuações do OLTC e OEL. Graças a maior capacidade dos conversores do
FRC, esta tecnologia de aerogerador consegue oferecer um suporte melhor de tensão do
que o DFIG. Contudo, conversores de maior capacidade oneram o custo da energia
eólica e do sistema eólico. Como parte dos serviços ancilares, nas baixas velocidades de
ventos os aerogeradores podem fornecer potência reativa ao sistema, operando de
maneira similar ao compensador síncrono. Neste sentido, o FRC pode ter um destaque
no mercado eólico do futuro, devido a sua grande capacidade de suporte de potência
reativa. Esta é uma característica importante que deve ser considerada na escolha da
tecnologia de aerogerador para ser integrada nos parques eólicos dos sistemas de
potência do futuro.
7.5
Contribuição do GSC para a Estabilidade de Tensão de Longo-Prazo
A influência do conversor GSC do DFIG sobre a estabilidade de tensão é
investigada adotando duas estratégias de controle: GSC com fator de potência unitário,
a qual normalmente é empregada, e GSC com controle de potência reativa. Os
resultados das simulações mostram que o aumento da penetração eólica é benéfica para
a estabilidade de tensão de longo-prazo do sistema de potência. Conforme os níveis de
penetração aumentam, ambas as tecnologias de aerogeradores a velocidade variável
conseguem proporcionar mais potência reativa, melhorando a estabilidade de tensão. Os
resultados também mostram que o FRC é mais robusto do que o DFIG quando o sistema
de potência é submetido a um aumento gradual de carga, resultando em um processo
acumulativo envolvendo ações combinadas do OLTC e OEL. No entanto, quando
conversor GSC está controlando a potência reativa, uma melhoria significativa é obtida.
O aerogerador DFIG tem mais capacidade de potência reativa do que FRC quando o
conversor GSC pode fornecer potência reativa ao sistema de potência. Nesse caso, o
comportamento dinâmico do sistema é melhor e a estabilidade de tensão é melhorada.
7.6
Conclusões Finais
A energia eólica é a energia renovável que mais cresce no mundo em capacidade
adicionada e apresenta a maior capacidade instalada no mundo todo em relação às
162
outras energias renováveis, conforme visto no Capítulo 1. A cada ano cresce a
penetração eólica nos sistemas de potência do mundo todo, seja para a diversificação da
matriz energética, independência dos combustíveis fósseis, diminuição dos impactos
ambientais e competitividade no mercado da geração de energia. Por estes motivos e
muitos outros, a energia eólica vem sendo estudada durante muitos anos por vários
pesquisadores.
A integração da energia eólica nos sistemas de potência do mundo todo criou
novos desafios para os operadores de sistema, no que diz respeito à operação e a
estabilidade do sistema de potência. Isso se deve à característica intermitente da fonte e
à dinâmica diferenciada dos aerogeradores em relação aos geradores síncronos
convencionais.
Conforme visto no Capítulo 2, os primeiros sistemas eólicos de grande porte
conectados aos sistemas de potência operavam a velocidade constante, constituídos por
SCIG. Esse tipo de aerogerador ganhou bastante aceitação no mercado eólico de
fabricantes pela construção robusta e barata e operação simples, sem necessidade de
sistemas de controle complexos. Entretanto, a medida que a penetração eólica alcançava
níveis elevados, surgiram os primeiros problemas de instabilidade associados aos
aerogeradores.
Para conter o avanço da penetração eólica do SCIG, os operadores de sistema
reformularam os códigos de rede exigindo novas metas, sendo a capacidade de
sobrevivência a afundamentos de tensão, conhecido como procedimento de ridethrough,
a principal delas. Quando uma falta acontecia próximo ao aerogerador, o operador de
sistema permitia que o mesmo fosse desconectado durante a falta e resincronizado com
o sistema de potência após a eliminação da falta. A desconexão do parque eólico
provocava sérios riscos à estabilidade do sistema de potência, por este motivo o
procedimento de ridethrough passou a ser exigido pelos operadores de sistema. Devido
à incapacidade de fornecer potência reativa do SCIG para rápida recuperação da tensão
terminal,
os
aerogeradores
SCIG
apresentavam
problemas
de
estabilidade,
especialmente instabilidade de tensão no curto-prazo.
Diante desses problemas de instabilidades, o mercado eólico de fabricantes
surgiu com um novo conceito de sistema eólico: velocidade variável, do qual fazem
parte o DFIG e o FRC. Neste caso, os aerogeradores são equipados com conversores de
eletrônica de potência, capazes de oferecer um melhor aproveitamento energético do
potencial eólico e maior controlabilidade, especialmente no fornecimento de potência
163
reativa. Essas características determinaram a perda de mercado dos aerogeradores SCIG
na integração de grandes parques eólicos na atualidade, conforme visto no Capítulo 2.
Muitos trabalhos foram feitos na literatura enfocando o procedimento de
ridethrough tanto para aerogeradores a velocidade constante como velocidade variável.
Notadamente, os aerogeradores DFIG e FRC superaram os aerogeradores SCIG,
cumprindo as exigências dos códigos de rede e melhorando a margem de estabilidade
do sistema de potência. Pode-se dizer que atualmente o procedimento de ridethrough,
em aerogeradores a velocidade variável, é uma tarefa solucionada no mundo todo.
Contudo, a expansão do sistema de transmissão não acompanha o crescimento
da carga. Isto faz com que o sistema de potência opere cada vez mais próximo dos seus
limites em condições de carregamento elevado. Quando o sistema de potência opera
sobrecarregado, as quedas de tensão nas linhas de transmissão aumentam e as tensões
nas barras de carga diminuem, devido à incapacidade do sistema de transmissão atender
a demanda requerida. Esse é um cenário característico de instabilidade de tensão de
longo-prazo. Os principais componentes que influenciam diretamente na estabilidade de
tensão de longo-prazo são: OLTC, OEL e o motor de indução, conforme apresentado no
Capítulo 3. Todos esses equipamentos foram levados em consideração nos estudos
realizados nesta tese.
A estabilidade de tensão de longo-prazo foi amplamente estudada e discutida na
literatura abordando quase que exclusivamente a geração síncrona convencional. Poucos
estudos envolvendo aerogeradores na estabilidade de tensão de longo-prazo foram
realizados. Atualmente, com o crescimento da demanda e a escassez dos investimentos
no sistema de transmissão, associado a crescente penetração eólica, a estabilidade de
tensão de longo-prazo constitui-se como um problema em vanguarda nos modernos
sistemas de potência do mundo todo.
Para poder avaliar o suporte de tensão dos aerogeradores a velocidade variável é
necessário determinar corretamente as reservas de potência reativa dos aerogeradores
DFIG e FRC. Os capítulos 4 e 5 abordaram com detalhes a construção da curva de
capacidade para os aerogeradores DFIG e FRC, respectivamente. A capacidade de
potência reativa dos aerogeradores a velocidade variável está intimamente ligada à
capacidade dos conversores de potência. Especificamente para a estabilidade de tensão é
importante avaliar a parte da curva de capacidade referente à injeção de potência
reativa. Para o DFIG, a corrente do conversor no rotor é fator limitante para a produção
de potência reativa, indicando que este aerogerador tem uma capacidade maior para
164
absorver potência reativa do que injetar. Entretanto, o suporte de potência reativa pelo
GSC expande consideravelmente a curva de capacidade do DFIG. Para o FRC, a
corrente do inversor é o fator limitante de potência reativa e a capacidade de potência
reativa é do aerogerador é controlada exclusivamente pelo inversor, o qual apresenta a
mesma capacidade para injeção/absorção de potência reativa.
A capacidade de potência reativa pode ser expandida facilmente pelo
sobredimensionamento dos conversores de potência. Conforme discutido no Capítulo 4,
o sobredimensionamento do conversor corresponde a um custo insignificante sobre o
investimento total, estimulando ainda mais o investidor para adoção de um conversor
sobredimensionado. Evidentemente, esta prática deve ter efeitos benéficos para a
estabilidade de tensão de longo-prazo. Contudo, como parte dos objetivos desta tese, a
contribuição de cada aerogerador para a estabilidade de tensão de longo-prazo foi
analisada sob as mesmas condições, ou seja, considerando a capacidade nominal de
cada aerogerador sem ganhos proporcionados pelo sobredimensionamento dos
conversores.
A integração de aerogeradores SCIG, em níveis elevados, trás sérios riscos a
estabilidade de tensão de longo-prazo do sistema de potência, porque essa máquina
absorve grandes quantidades de potência reativa em situações de contingências, fazendo
com que o OLTC provoque mudanças de tap com maior frequência. Esse efeito provoca
o dreno de potência reativa do restante do sistema para atender a carga controlada pelo
OLTC, levando a sobrecarga dos geradores síncronos convencionais com subsequente
atuação do OEL e inevitavelmente a ocorrência do colapso de tensão.
Por outro lado, a integração de aerogeradores a velocidade variável oferece mais
estabilidade ao sistema de potência, graças aos conversores de eletrônica, capazes de
proporcionar operação em velocidade variável com maximização do aproveitamento do
recurso eólico e fornecimento de potência reativa para o controle de tensão.
Quando o DFIG opera com controle da tensão terminal, o sistema de potência
apresenta um comportamento dinâmico melhor em relação ao controle do fator de
potência, inclusive podendo evitar o colapso de tensão com carga dinâmica fortemente
indutiva, como é o caso do motor de indução. Com o controle da tensão terminal, o
sistema de potência consegue atender uma demanda maior sem ocorrência do colapso
de tensão, graças às atuações atrasadas do OLTC e OEL proporcionadas pelo
fornecimento de potência reativa do aerogerador. Desse modo seria interessante
165
considerar a contribuição dos aerogeradores a velocidade variável para o controle de
tensão secundário dos sistemas de potência.
Devido à complementariedade das fontes hídrico-eólica no Brasil, os
aerogeradores podem ajudar a atender a demanda durante o ano todo. Contudo, apenas
os aerogeradores a velocidade variável oferecem um grande potencial para suporte de
potência reativa. Quando a velocidade dos ventos é baixa as reservas de potência reativa
são abundantes, e o aerogerador pode operar como uma fonte de potência reativa
alternativa, tal como um compensador síncrono, SVC ou FACTS. Em certos casos, o
sistema de potência auxiliado por aerogeradores pode apresentar um comportamento
dinâmico melhor do que aqueles suportados pelos geradores síncronos convencionais.
Essa característica complementar pode ser usada de forma adequada pelos operadores
de sistema para atender a demanda e evitar o colapso de tensão.
Dentre os aerogeradores a velocidade variável, sob mesmas condições de
operação e capacidade dos conversores de potência, o DFIG destaca-se a frente do FRC
em relação à contribuição para estabilidade de tensão de longo-prazo. Isso se deve a
contribuição do GSC no suporte do controle de tensão, o qual consegue expandir os
limites de potência reativa do DFIG além dos limites do FRC, conforme visto nos
capítulos 4 e 5.
O GSC pode evitar o colapso de tensão quando usado como uma fonte auxiliar
de potência reativa em relação ao estator para o controle da tensão terminal. Nos
momentos em que as reservas de potência reativa do aerogerador pelo controle do RSC
encontram-se escassas, seja pelas condições dos ventos ou pelas condições da rede, o
GSC entra em operação, elevando rapidamente a tensão terminal e contribuindo para a
restauração a carga, mesmo assim consegue evitar o colapso de tensão. Diferentemente
do FRC, no qual o processo de restauração da carga conduz ao colapso de tensão.
Finalmente, pode-se concluir que a integração, em altos níveis de penetração,
dos aerogeradores a velocidade variável, apesar de trazer novos desafios operacionais
para o sistema de potência, em geral, contribui positivamente para a estabilidade de
tensão de longo-prazo. Os aerogeradores a velocidade variável podem oferecer
flexibilidade operacional ao sistema de potência pela complementação das fontes
hídrico-eólica, suporte ao controle de tensão e ações corretivas para evitar o colapso de
tensão.
166
7.7
Trabalhos Futuros
Através dos resultados alcançados e das conclusões apresentadas, novas
pesquisas sobre o tema são levantadas a seguir:
Investigação da contribuição de aerogeradores a velocidade variável para o
controle secundário de tensão, considerando curvas de capacidade e limites
variáveis;
Inclusão do modelo dinâmico da turbina eólica, o qual leva em conta longos
períodos transitórios entre mudanças de velocidade do vento;
Investigação da influência da estratégia de controle de passo sobre a estabilidade
de tensão de longo-prazo;
Investigação da contribuição do sobredimensionamento dos conversores de
potência dos aerogeradores a velocidade variável para a estabilidade de tensão
de longo-prazo;
Proposta de novas estratégias de controle coordenado entre os conversores RSC
e GSC do DFIG para a estabilidade de tensão de longo-prazo;
Avaliação da complementariedade entre as fontes hídrico-eólica na operação e
na estabilidade de tensão de longo-prazo de sistemas de potência;
Inclusão dos aerogeradores a velocidade variável no controle automático da
geração e investigação de suas consequências sobre a estabilidade de tensão de
longo-prazo;
Investigação da estabilidade de tensão de longo-prazo com aerogeradores a
velocidade variável considerando um sistema de potência real, com várias
barras, gerações, proteções, OEL, OLTCs, cargas térmicas controladas por
tensão, etc.
167
Referências Bibliográficas
[1] REN21, Renewable Energy Policy Network for the 21st century, Renewables 2013
Global Status Report.
[2] O. Anaya-Lara, N. Jenkins, J. Ekanayake, P. Cartwright, M. Hughes, Wind
Generation, Modeling and Control, John Wiley & Sons, Ltd., 2009.
[3] GWEC, Global Wind Energy Council, Global Wind Report Annual Market Update
2013.
[4] ONS, Operador Nacional de Sistema.
[5] ABEEólica, Associação Brasileira de Energia Eólica, Boletim Anual de Geração
Eólica 2012.
[6] S. De Rijcke, H. Ergun, D. Van Hertem, J. Driesen, Grid Impact of Voltage Control
and Reactive Power Support by Wind Turbines Equipped With Direct-Drive
Synchronous Machines, IEEE Transactions on Sustainable Energy, vol.3, no.4,
pp.890-898, 2012.
[7] F. Blaabjerg, M. Liserre, K. Ma, Power Electronics Converters for Wind Turbine
System, IEEE Transactions on Industry Applications., vol.48, no.2, March 2012,
pp.708-719.
[8] N. Jenkins, R. Allan, P. Crossley, D. Kirschen, G. Strabac, Embedded Generation,
The Institution of Electrical Engineers, London, United Kingdom, 2000.
[9] P. Trichakis, P.C. Taylor, P.F. Lyons, R. Hair, Predicting the Technical Impacts of
High Levels of Small-Scale Embedded Generators on Low-Voltage Networks, IET
Renewable Power Generation, vol. 2, no. 4, April 2008, pp. 249–262.
168
[10] T. Van Cutsem, C. D. Vournas, Voltage Stability of Electric Power Systems,
Kluwer Academic Press, 1998.
[11] C. W. Taylor, Power System Voltage Stability, McGraw-Hill, 1994.
[12] IEEE/CIGRE Joint Task Force on Stability Terms and Definitions, Definition and
Classification of Power System Stability, IEEE Transactions on Power Systems,
vol. 19, no. 2, May 2004, pp. 1387-1401.
[13] U.S.-Canada Power System Outage Task Force, Final Report on the August 14,
307
2003
Blackout
in the
Recommendations,
United States
2004,
and Canada:
Causes
Available
and
at:
http://www.iwar.org.uk/cip/resources/blackout-03/
[14] C. D. Vournas, V. C. Nikolaidis, A. Tassoulis, Experience from the Athens
Blackout of July 12, 2004, Proceedings of IEEE PowerTech Conference, St
Petersburg, Russia, 2005.
[15] S. Corsi, C. Sabelli, General Blackout in Italy Sunday September 28, 2003, h.
03:28:00, Proceedings of IEEE Power Engineering Society General Meeting 2,
1691-1702, 2004.
[16] ONS, Procedimentos de rede, Submódulo 3.6, Requisitos Técnicos Mínimos para a
Conexão à Rede Básica, 2005.
[17] V. Akhmatov, Analysis of Dynamic Behaviour of Electric Power System with
Large Amount of Wind Power, Tese de Doutorado pela DTU, Dinamarca, 2003.
[18] J. G. Slootweg, Wind Power Modeling and Impacts on Power System Dynamics,
Tese de Doutorado pela Delft University of Technology. Holanda, 2003.
[19] J. P. A. Vieira, M. V. A. Nunes, U. H. Bezerra, A. C. Nascimento, Designing
Optimal Controllers for Doubly Fed Induction Generators Using a Genetic
169
Algorithm, IET Generation, Transmission & Distribution, v.3, n.5, May 2009,
pp.472-484.
[20] J. Morren, S. W. H. de Haan, Ridethrough of Wind Turbines with Doubly-Fed
Induction Generator during a Voltage Dip, IEEE Transactions on Energy
Conversion, vol.20, no.2, June 2005, pp.435-441.
[21] N. R. Ullah, T. Thiringer, D. Karlsson, Voltage and Transient Stability Support by
Wind Farms Complying With the E.ON Netz Grid Code, IEEE Transactions on
Power Systems, vol.22, no.4, 2007, pp.1647-1656.
[22] D. Khani, A. S. Yazdankhah, H. M. Kojabadi, Impacts of Distributed Generations
on Power System Transient and Voltage Stability, Electrical Power and Energy
Systems 43, pp.488-500, July 2012.
[23] D. Xie, Z. Xu, L. Yang, J. Ostergaard, Y. Xue, K. P. Wong, A Comprehensive
LVRT Control Strategy for DFIG Wind Turbines With Enchanced Reactive Power
Support, IEEE Transactions Power Systems, vol.28, no.3, pp.3302-3310, August
2013.
[24] E. Vittal, M. O’Malley, A. Keane, A Steady-State Voltage Stability Analysis of
Power Systems with High Penetrations of Wind, IEEE Transactions on Power
Systems, vol. 25, no. 1, Feb 2010, pp. 433-442.
[25] H. T. Le, S. Santoso, T. Q. Nguyen, Augmenting Wind Power Penetration and
Grid Voltage Stability Limits Using: Application Design, Sizing and a Case Study,
IEEE Transactions on Power Systems, vol. 27, no 1, Feb 2012, pp. 161-171.
[26] S. Corsi, G. N. Taranto, Voltage Instability – The Different Shapes of the Nose,
Bulk Power System Dynamics and Control, 2007 IREP Symposium, pp.1-16.
[27] S. Corsi, G. N. Taranto, A Real-Time Voltage Instability Identification Algorithm
Based on Local Phasor Measurements, IEEE Transactions on Power Systems,
vol.23, no.3, August 2008, pp.1271-1279.
170
[28] W. Freitas, J.C.M. Vieira, L.C.P. da Silva, C.M. Affonso, A. Morelato, Long-Term
Voltage Stability of Distribution Systems with Induction Generators, IEEE Power
Engineering Society General Meeting, vol.3, 2005, pp. 2910-2913.
[29] M. J. Houssain, H. R. Pota, Md. A. Mahmud, R. A. Ramos, Investigation of the
Impacts of Large-Scale Wind Power Penetration on the Angle and Voltage Stability
of Power Systems, IEEE Systems Journal, vol.6, no.1, pp.76-84, 2012.
[30] M. V. A. Nunes, J. A. Peças Lopes, H. H. Zurn, U. H. Bezerra, R. G. Almeida,
Influence of the Variable-Speed Wind Generators in Transient Stability Margin of
the Conventional Generators Integrated in Electrical Grids, IEEE Transactions on
Energy Conversion, vol.19, no.4, 2004, pp.692-701.
[31] F. Mei, B. C. Pal, Modal Analysis of Grid-Connected Doubly-Fed Induction
Generators, IEEE Transactions on Energy Conversion, vol.22, no.3, August 2007,
pp.728-736.
[32] R. M. M. Pereira, C. M. M. Ferreira, F. P. M. Barbosa, Comparative Study of
STATCOM and SVC Performance on Dynamic Voltage Collapse of an Electric
Power System with Wind Generation, IEEE Transactions Latin America, vol.12,
no.2, March 2014, pp.138-145.
[33] N. R. Ullah, T. Thiringer, Variable Speed Wind Turbines for Power System
Stability Enhancement, IEEE Transactions on Energy Conversion, vol. 22, no. 1,
pp. 52-60, 2007.
[34] D. Ming, L. Binbin, H. Pingping, Impacts of Doubly-Fed Wind Turbine Generator
Operation Mode on System Voltage Stability, IEEE International Symposium on
Power Electronics for Distribution Generation Systems, June 2010, pp.602-606.
[35] T. Lund, P. Sorensen, J. Eek, Reactive Power Capability of a Wind Turbine with
Doubly Fed Induction Generator, Wind Engineering, no. 10, pp.379-394, 2007.
171
[36] S. Engelhardt, I. Erlich, C. Feltes, J. Kretschmann, F. Shewarega, Reactive Power
Capability of Wind Turbines Based on Doubly Fed Induction Generators, IEEE
Transactions on Energy Conversion, vol.25, no.1, March 2011, pp. 364-372.
[37] R. J. Konopinski, P. Vijayan, V. Ajjarapu, Extended Reactive Capability of DFIG
Wind Parks for Enhanced System Performance, IEEE Transactions on Power
Systems, vol. 24, no. 3, pp.1346-1355, 2009.
[38] M. Kayıkçı, J. V. Milanovic, Reactive Power Control Strategies for DFIG-Based
Plants, IEEE Transactions on Energy Conversion, vol. 22, no. 2, pp. 389-396,
2007.
[39] L. Meegahapola, T. Littler, S. Perera, Capability curve based enhanced reactive
power control strategy for stability enhancement and network voltage management,
International Journal of Electrical Power & Energy Systems, vol.52, pp. 96–106,
2013.
[40] N. R. Ullah, K. Bhattacharya, T. Thiringer, Wind Farms as Reactive Power
Ancillary Service Providers – Technical and Economic Issues, IEEE Transactions
on Energy Conversion, vol.24, no.3, September 2009, pp.661-672.
[41] C. A. Aumuller, T. K. Saha, Investigating the Impact of Powerformer on Voltage
Stability by Dynamic Simulation, IEEE Transactions on Power Systems, vol.16,
no.3, August 2003, pp.1142-1148.
[42] I. A. Metwally, R. M. Radwan, A. M. Abou-Elyazied, Powerformers: A
breakthrough of high-voltage power generators, IEEE Magazine Potentials,
May/June 2008, pp.37-44.
[43] H. Polinder, J. A. Ferreira, B. B. Jensen, A. B. Abrahamsen, K. Atallah, R. A.
McMahon, Trends in Wind Turbine Generator Systems, IEEE Journal of Emerging
and Selected Topics in Power Electronics, vol.1, no.3, 2013, pp.174-185.
172
[44] M. Tazil, V. Kumar, R. C. Bansal, S. Kong, Z. Y. Dong, W. Freitas, H. D. Mathur,
Three-phase doubly fed induction generators: an overview, IET Electric Power
Applications, vol.4, iss.2, 2010, pp.75-89.
[45] M. Pinto, Fundamentos de Energia Eólica, LTC, 2013.
[46] F. D. Bianchi, F. H. Battista, R. J. Mantz, Wind Turbine Control Systems, SpringerVerlag, 2007.
[47] E. A. F. A. Fadigas, Energia Eólica, Manole, 2011.
[48] BTM Consult, World Wind Market Update 2012, Março, 2013.
[49] P. Kundur, Power System Stability and Control, McGraw-Hill, 1994.
[50] Y. Mitsutoshi, O. Motoyoshi, Active and Reactive Power Control for Doubly Fed
Wound Rotor Induction Generator, IEEE Transactions on Power Electronics, vol.6,
no.4, 1991, pp.624-629.
[51] M. Braun, Reactive Power Supplied by Wind Energy Converters Cost-BenefitAnalysis, EWEC European Wind Energy Conference, Belgium, 2008.
[52] A. G. Expósito, A. J. Conejo, C. Cañizares, Sistemas de Energia Elétrica: Análise
e Operação, LTC, 2011.
[53] J. Machowski, J. W. Bialek, J. R. Bumby, Power System Dynamics and Stability,
John Wiley & Sons, 1997.
[54] Y. Coughlan, P. Smith, A. Mullane, M. O’Malley, Wind Turbine Modelling for
Power System Stability Analysis – A System Operator Perspective, IEEE
Transactions on Power Systems, vol.22, no.3, August 2007, pp.929-936.
[55] P. M. Anderson, B.L. Agrawal, J.E. Van Ness, Subsynchronous Ressonance in
Power Systems, IEEE Press, 1990.
173
[56] R. D. Rangel, J. C. R. Ferraz, S. Gomes Jr., R. M. Henriques, Modelagem de
Geração Eólica em Programas de Fluxo de Potência e de Análise de Estabilidade
Eletromecânica, XVIII SNPTEE Seminário Nacional de Produção e Transmissão
de Energia Elétrica, Curitiba-PR, Brasil, 2005.
[57] J. B. Ekanayake, L. Holdsworth, N. Jenkins, Comparison of 5th Order and 3rd
Order Machine Models for Doubly Fed Induction Generator (DFIG) Wind
Turbines, Electric Power System Research, v.67, n.3, pp.207-215, 2003.
[58] J. G. Slootweg, S. W. H. de Haan, H. Polinder, W. L. Kling, General Model for
Representing Variable Speed Wind Turbines in Power System Dynamics
Simulations, IEEE Transactions on Power Systems, vol.18, no.1, February 2003,
pp.144-151.
[59] T. Ackermann, Wind Power in Power Systems, John Wiley & Sons, 2005.
[60] J. G. Slootweg, H. Polinder, W. L. Kling, Representing Wind Turbine Electrical
Generating Systems in Fundamental Frequency Simulations, IEEE Transactions on
Energy Conversion, vol.18, no.4, December 2003, pp.516-524.
[61] M. Kayikçi, J. V. Milanovic, Assessing Transient Reponse of DFIG-Based Wind
Plants – The Influence of Model Simplifications and Parameters, IEEE
Transactions on Power Systems, vol.22, no.2, May 2008, pp.389-396.
[62] D. Gautam, V. Vittal, T. Harbour, Impact of Increased Penetration of DFIG-Based
Wind Turbine Generators on Transient and Small Signal Stability of Power
Systems, IEEE Transactions of Power Systems, vol.24, no.3, August 2009,
pp.1426-1434.
[63] F. M. Hughes, O. Anaya-Lara, N. Jenkins, G. Strbac, A Power System Stabilizer for
DFIG-Based Wind Generation, IEEE Transactions on Power Systems, vol.21, no.2,
May 2006, pp.763-772.
174
[64] R. D. Rangel, R. Gárdos, A. Pedroso, E. H. Watanabe, Representação de Elos CC
“back-to-back” baseados em conversores de tensão, para Estudos de Estabilidade
Eletromecânica, XI SEPOPE Simpósio de Especialistas em Planejamento da
Operação e Expansão Elétrica, Belém-PA, Brasil, 2009.
[65] M. A. Poller, Doubly-Fed Induction Machine Models for Stability Assessment of
Wind Farms, IEEE PowerTech Conference, June 2003, Bologna, Italy.
[66] D. W. Hart, Power Electronics, McGraw-Hill, 2011.
[67] R. Pena, J. C. Clare, G. M. Asher, Doubly Fed Induction Generator using Back-toBack PWM Converters and its Application to Variable-Speed Wind-Energy
Generation, IEE Proc.-Eletr. Power Appl., vol.143, no.3, May, 1996, pp.231-241.
[68] S. Achilles, M. Poller, Direct Drive Synchronous Machine Models for Stability
Assessment of Wind Farms, Proc. 4th International Workshop on Large Scale
Integration of Wind Power and Transmission Networks for Offshore Wind Farms,
Billund, Denmark, October 2003.
[69] R. D. Rangel, S. Gomes Jr., J. C. R. Ferraz, Modelagem de Aerogeradores
Baseados em Máquinas Síncronas de Velocidade Variável em Programas de
Análise de Estabilidade Eletromecânica, X SEPOPE, 2006, Florianópolis-SC,
Brasil.
[70] A. C. Lopes, A. C. Nascimento, J. P. A. Vieira, M. V. A. Nunes, U. H. Bezerra,
Reactive Power Control of Direct Drive Synchronous Generators to Enhance the
Low Voltage Ride-Through Capability, intechopen
[71] CEPEL, Centro de Pesquisas de Energia Elétrica, ANAREDE: Programa de
Análise de Redes, Manual do Usuário, V09.05.02, Setembro 2009.
[72] CEPEL, Centro de Pesquisas de Energia Elétrica, ANATEM: Análise de
Transitórios Eletromecânicos, Manual do Usuário, V10.01.00, Dezembro 2007.
175
[73] R. D. Rangel, C. H. C. Guimarães, Modelagem de Transformadores com
Dispositivos de Comutação em Carga para Utilização em Programas de Simulação
Dinâmica, XIX SNPTEE, 2007.
[74] R. R. Londero, C. M. Affonso, J. P. A. Vieira, Impactos Causados pela Integração
de Aerogeradores SCIG e DFIG na Estabilidade de Tensão de Longo-Prazo em
Sistemas Elétricos, XII SEPOPE, 2012.
[75] R. R. Londero, C. M. Affonso, J. P. A. Vieira, U.H. Bezerra, Impacts of Different
DFIG Wind Turbine Control Modes on Long-Term Voltage Stability, IEEE
Innovative Smart Grid Technnology Conference ISGT, Berlin, 2012.
[76] R. R. Londero, C. M. Affonso, J. P. A. Vieira, Contribuição de Aerogeradores a
Velocidade Variável para a Estabilidade de Tensão de Longo-Prazo, XIII
SEPOPE, 2014.
[77] R. R. Londero, C. M. Affonso, J. P. A. Vieira, Long-Term Voltage Stability
Analysis of Variable Speed Wind Generators, IEEE Transactions on Power System.
176
Anexo – Dados do Sistema Teste
Geradores Síncronos (em p.u. na base da máquina):
G1: barra infinita
G2: H = 2,09 s Sb = 2200 MVA
G3: H = 2,33 s Sb = 1400 MVA
Ra = 0,0046
Xq = 1,99
T’d0 = 4,10 s
X’d = 0,28
X”q = 0,215
T”d0 = 0,033 s
Xd = 2,07
X’q = 0,49
T’q0 = 0,56 s
X”d = 0,215
Xl = 0,155
T”q0 = 0,0062 s
0,909
0,682
0,455
Curva de Capacidade G2
Curva de Capacidade G3
Ponto de Operacao G2
Ponto de Operacao G3
0,227
0,
-0,42
-0,18
0,05
0,29
0,53
Potencia Reativa Gerada (p.u.)
Figura A1 Curvas de capacidades dos geradores G2 e G3 em suas respectivas bases.
Dados do sistema de potência (em p.u. na base Sb = 100 MVA):
Linha 5-6
Linha 6-7
Linha 9-10
Transformador T1
Transformador T2
Transformador T3
Transformador T4
Transformador T5
Transformador T6
R = 0,0
R = 0,0015
R = 0,0010
R = 0,0
R = 0,0
R = 0,0
R = 0,0
R = 0,0
R = 0,0
X = 0,0040
X = 0,0288
X = 0,0030
X = 0,0020
X = 0,0040
X = 0,0125
X = 0,0030
X = 0.0026
X = 0,01
B = 0,0
B = 1,173
B = 0,0
a = 0,8857
a = 0,8857
a = 0,9024
a = 1,0664
a = 1,0800
a = 1,0000
0,77
177
Transformador com comutador de tap sob carga OLTC:
Compensação de
queda de tensão
V ref
Elemento
Sensor
Relé com
temporização
Motor para
acionamento
Comutador
Figura A2 Diagrama de blocos do OLTC.
Tempo de atraso para o 1o tap
Tempo de atraso para os taps subsequentes
Banda morta
Intervalo de tap
Comprimento do tap
30 s
5s
1% tensão da barra
16 taps
5/8% (0,00625 p.u.)
Regulador automático de tensão AVR:
VREF
Vt
1
1 sT R
KA
E fd
VOEL
Figura A3 Diagrama de blocos do AVR.
400
0,02 s
KA
TR
Limitador de sobre-excitação OEL:
I fd max1
I fd
I fd max 2
0
1
s
K1
Ilim
K2
VOEL
0
I fd
Figura A4 Diagrama de blocos do OEL.
Ifdmax1 (p.u.)
Ifdmax2 (p.u.)
K1
K2
Ilim (p.u.)
1,407
2,144
0,248
12,6
3,85
ta p
178
I
fd
I fd max 2 1.6 FLC
FLC = Full Load Current
I fd max1 1.05 FLC
t (seg)
0
30
Figura A5 Curva característica do OEL.
Motor de indução (% base da máquina)
rs
xs
xm
rr
xr
Potência
H
f
1
14,5
330
0,8
14,5
4826 HP
0,6 s
60 Hz
* Torque de carga de característica quadrática
SCIG (% base da máquina)
rs = 0,85
rr = 0,712
xr = 8,094
xs = 5,776
xm = 505,9
f = 60 Hz
P = 850 kW
Hg = 0,5 s
Ht = 3,0 s
ks = 0,3
Polos = 4
DFIG (% base da máquina)
rs
xs
xm
rr
xr
Potência
H
Polos
f
Sc
0,85
5,776
505,9
0,712
8,094
850 kW
3,5 s
4
60 Hz
300 kVA
FRC (% base da máquina)
Ld = 113,8
L’d = 35
Ll = 15,8
T”d = 0,08s
Ra = 0,0
Lq = 68,1
L”d = 28,8
T’d = 5,6s
T”q = 0,15s
f = 20 Hz
H = 3,5s
D = 0,0
Polos = 90
Sg = 895 kVA
Sc = 895 kVA
* na seção 6.6 Sc = 1 MVA
179
Turbina Eólica:
Diâmetro (m)
Engrenagem
Potência
SCIG
58
69
850 kW
DFIG
58
74,5
850 kW
FRC
58
1
850 kW
900
800
700
Potência (kW)
600
500
400
300
200
100
0
2
4
6
8
10
12
Velocidade do vento (m/s)
14
16
18
Figura A6 Curva de Potência do DFIG.
900
800
700
Potência (kW)
600
500
400
300
200
100
0
4
6
8
10
12
14
Velocidade do vento (m/s)
Figura A7 Curva de Potência do FRC.
16
18
180
1.1
1
Velocidade (p.u.)
0.9
0.8
0.7
0.6
0.5
0.4
0
0.1
0.2
0.3
0.4
0.5
0.6
Potência (p.u.)
Figura A8 Curva de referência
0.7
0.8
0.9
do FRC.
1