Centro Universitário Positivo - UnicenP
Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação
Dirnei Tulio
Sistema de Proteção Anti-Surge para Compressores
Curitiba
2006
ii
Centro Universitário Positivo - UnicenP
Núcleo de Ciências Exatas e Tecnológicas – NCET
Engenharia da Computação
Dirnei Tulio
Sistema de Proteção Anti-Surge para Compressores
Monografia apresentada à disciplina de
Projeto Final, como requisito parcial à
conclusão do Curso de Engenharia da
Computação.
Orientador : Prof. Mauricio Peretto.
Curitiba, 12 de junho de 2006.
iii
TERMO DE APROVAÇÃO
Dirnei Tulio
Sistema de Proteção Anti-Surge para Compressores
Monografia aprovada como requisito parcial à conclusão do curso de
Engenharia da Computação do Centro Universitário Positivo, pela
seguinte banca examinadora:
Prof. Mauricio Perretto (Orientador)
Prof. Edson Pedro Ferlin
Prof. Roberto Selow
Curitiba, 12 de junho de 2006.
iv
v
AGRADECIMENTOS
Primeiramente à minha família que me incentivou a permanecer nesta árdua
caminhada e ao colega de trabalho Marcio Lemos de Oliveira que me incentivou a
retornar aos estudos depois de 25 anos de conclusão do 2º grau. Aos colegas de
classe que muito me ajudaram, em especial Luiz Gustavo Dall’Igna Variani e Mauricio
Cúnico no apoio com seus conhecimentos. Ao Thiago Felipe por seu constante
incentivo. Ao meu irmão Diomar Tulio e a sua esposa Maria Eliza Comparin Tulio pelo
apoio na realização dos testes. Aos professores que com paciência se dispuseram a
apoiar e incentivar a realização deste projeto em especial ao professor Maurício
Perretto, que com objetividade e clareza orientou seu desenvolvimento.
vi
vii
SUMÁRIO
Sumário ...................................................................................................... viii
Lista de Siglas............................................................................................ xiv
Lista de Símbolos ....................................................................................... xv
Resumo ...................................................................................................... xvi
Abstract ..................................................................................................... xvii
1. Introdução ............................................................................................... 1
1.1.
Histórico .................................................................................................................1
1.2.
O “Surge”: Um Fenômeno a Ser Evitado ...............................................................2
1.3.
Objetivo do Projeto.................................................................................................5
1.4.
Divisão do projeto...................................................................................................7
2. Estudo Teórico........................................................................................ 8
2.1.
O Compressor de ar VK .........................................................................................8
2.2.
Sistemas Supervisórios..........................................................................................9
2.3.
Monitoração .........................................................................................................12
2.3.1. Transmissores ..................................................................................................12
2.3.1.1. O Sensor do tipo Capacitivo ...................................................................... 13
2.3.1.2. O Sensor Piezo-Resistivo.......................................................................... 19
2.4.
Atuadores ou Elementos Finais de Controle ........................................................27
2.4.1. Motores.............................................................................................................27
2.4.2. Válvulas de Controle.........................................................................................28
2.5.
Tratamento do Sinal .............................................................................................30
2.6.
O Microcontrolador...............................................................................................32
2.6.1. Família dos Microcontroladores PIC.................................................................32
2.6.2. Característica da tecnologia RISC....................................................................33
2.6.3. Arquitetura Harvard x Von Neumann................................................................34
2.6.4. Ciclo de Instruções ...........................................................................................35
2.6.5. Fluxo de Instrução/ Pipeline .............................................................................36
2.6.6. Palavra de Instrução Longa..............................................................................37
viii
2.6.7. A função do Microcontrolador no Sistema Anti-Surge ......................................38
2.7.
Fluxograma Básico do Sistema Anti-Surge..........................................................41
2.8.
Custos Estimados ................................................................................................42
2.9.
Cronograma do Projeto ........................................................................................43
3. Especificação........................................................................................ 44
3.1.
Hardware..............................................................................................................44
3.1.1. Funções do Hardware ......................................................................................44
3.1.2. Componentes Utilizados...................................................................................44
3.1.3. Requisitos do Sistema ......................................................................................45
3.1.4. Diagrama em Blocos ........................................................................................46
3.2.
Software ...............................................................................................................47
3.3.
Requisitos ............................................................................................................49
3.3.1. Funções do Software........................................................................................50
3.4.
Ambiente de Desenvolvimento.............................................................................50
3.4.1. Fluxograma.......................................................................................................51
3.5.
Firmware ..............................................................................................................52
3.5.1. Ambiente de Desenvolvimento do Firmware ....................................................52
3.6.
Fluxograma do Firmware .....................................................................................53
4. Projeto do Hardware............................................................................. 55
4.1.
Cálculo do circuito amplificador do sensor de pressão. .......................................55
4.1.1. Cálculo sub-circuito de alimentação do sensor de pressão..............................55
4.1.2. Cálculo e Desenvolvimento do Circuito Amplificador........................................56
4.1.3. Desenvolvimento Circuito do Microcontrolador ................................................57
4.1.4. Cálculo e Desenvolvimento do Circuito do Modulador de Potência..................58
4.1.5. Sinais de Interface ............................................................................................58
Tabela 4 - Sinais de Interface entre os Circuitos Eletrônicos.................. 58
4.1.6. Lista de Materiais..............................................................................................59
5. Projeto do Sotfware.............................................................................. 60
5.1.
Diagramas de Caso de Uso .................................................................................60
5.2.
Diagramas de Seqüência .....................................................................................64
5.3.
Diagrama de Classes ...........................................................................................68
5.4.
Código do Software Supervisório .........................................................................69
ix
5.5.
Código do Firmware do microcontrolador PIC 16F877A ......................................69
6. Resultados ............................................................................................ 70
6.1.
Testes com o Hardware dos Sensores de Pressão .............................................70
6.2.
Testes com o Hardware do Microcontrolador.......................................................72
6.3.
Testes com o Hardware do Acionador do Motor ..................................................74
6.4.
Testes com o Supervisório...................................................................................74
7. Conclusão ............................................................................................. 79
7.1.
Aspectos Negativos..............................................................................................79
7.2.
Aspectos Positivos ...............................................................................................79
7.3.
Desenvolvimentos Futuros...................................................................................80
8. Referências Bibliográficas................................................................... 82
9. Anexos................................................................................................... 83
9.1.
Circuito Esquemático da Fonte de Alimentação do Circuito.................................83
9.2.
Circuito Esquemático do Circuito Transdutor de Pressão. ...................................84
9.3.
Circuito Esquemático do Microcontrolador PIC 16F877A. ...................................85
9.4.
Circuito Esquemático do Circuito do Modulador de Potência...............................86
9.5.
Listas de Materiais do Circuito do Modulador de Potência...................................87
9.6.
Listas de Materiais do Circuito do Microcontrolador.............................................88
9.7.
Listas de Materiais do Circuito dos Transdutores de Pressão. ............................89
10. GLOSSÁRIO .......................................................................................... 90
x
LISTA DAS FIGURAS
Fig. 1 - Mapa de Performance...............................................................................................5
Fig. 2 - Tela de sistema supervisório...................................................................................9
Fig. 3 - Sistema supervisório interligado ao chão de fábrica e ao sistema corporativo.......10
Fig. 4 - Gráfico de registros de variáveis.............................................................................11
Fig. 5 - Tela de operação do equipamento..........................................................................11
Fig. 6 -Transmissor de Pressão Manométrica Industrial.....................................................12
Fig. 7 - Circuito de alimentação elétrica de um transmissor industrial................................14
Fig. 8 - Tensão de alimentação de um transmissor de acordo com a carga.......................15
Fig. 9 - Célula Capacitiva.....................................................................................................16
Fig. 10 - Diagrama em blocos de um transmissor de pressão............................................18
Fig. 11 - Sensor Piezo-Resistivo da Motorola.....................................................................19
Fig. 12 - Disposição circuito interno do sensor piezo-resistivo............................................21
Fig. 13 - Disposição física do sensor MPX53DP.................................................................22
Fig. 14 - Curva característica do sensor MPX53DP em relação à temperatura..................23
Fig. 15 - Figura do arranjo interno do sensor piezo-resistivo..............................................24
Fig. 16 -Curva de linearidade do sensor MPX53DP............................................................26
Fig. 17 - Válvula Rotativa, do tipo borboleta........................................................................28
Fig. 18 - Válvula de Deslocamento Linear...........................................................................29
Fig. 19 - Atuador de Ação Direta com retorno por mola......................................................30
Fig. 20 - Diagrama Básico de uma Malha de Controle........................................................31
Fig. 21 - Arquitetura de Neumann.......................................................................................34
Fig. 22 - Arquitetura de Harward.........................................................................................34
Fig. 23 - Ciclo de instrução de um PIC................................................................................35
Fig. 24 - Execução de instruções em PIPELINE.................................................................36
xi
Fig. 25 - Exemplos de tamanho de instruções de um PIC..................................................37
Fig. 26 - Microcontrolador....................................................................................................39
Fig. 27 - Arquitetura interna do PIC 16F877A.....................................................................40
Fig. 28 - Fluxograma básico do Sistema Anti-Surge...........................................................41
Fig. 29 - Cronograma do Projeto.........................................................................................43
Fig. 30 Diagrama em blocos do Sistema Anti-Surge...........................................................46
Fig. 31 - Tela Principal da IHM de operação do sistema.....................................................48
Fig. 32 - Tela de Configuração do Sistema.........................................................................49
Fig. 33 - Fluxograma do software de supervisão do sistema anti-surge.............................51
Fig. 34 - Fluxograma do firmware do PIC16F877A.............................................................53
Fig. 35 - Diagrama de Casos de Uso do Sistema Anti-Surge.............................................60
Fig. 36 - Diagrama de seqüência do caso de uso “Iniciar”..................................................64
Fig. 37 - Diagrama de seqüência do caso de uso “Operar em Manual”..............................65
Fig. 38 - Diagrama de seqüência do caso de uso “Ativar Proteção”...................................66
Fig. 39 - Diagrama de seqüência do caso de uso “Finalizar”..............................................66
Fig. 40 - Diagrama de seqüência do caso de uso “Exibir Gráfico”......................................67
Fig. 41 - Placa dos Circuitos Fonte eSensores de Pressão...............................................70
Fig. 42 - Placa do Circuito do Microcontrolador..................................................................72
Fig. 43 - Compressor utilizado para teste do Sistema Anti-Surge......................................74
Fig. 44 - Tela do Supervisório quando a máquina está em operação normal....................75
Fig. 45 - Tela do Supervisório quando a máquina está em alerta......................................76
Fig. 46 - Tela do Supervisório quando a máquina está em operação na área de surge....77
Fig. 47 - Tela do Supervisório para a consulta ao “Histórico”.............................................78
Fig. 48 - Fonte de Alimentação do Circuito Eletrônico........................................................83
Fig. 49 - Diagrama Esquemático do Circuito dos Transdutores de Pressão.......................84
Fig. 50 - Circuito do Microcontrolador PIC 16F877A...........................................................85
Fig. 51 - Circuito do Modulador de Potência.......................................................................86
xii
LISTA DAS TABELAS
Tabela1 - Características de pressão e temperatura do sensor. ...................................24
Tabela 2- Propriedades do elemento sensor piezo-resistivo da Motorola. ....................25
Tabela 3 - Custo para a execução do projeto. ...............................................................42
Tabela 4 - Sinais de Interface entre os Circuitos Eletrônicos ........................................58
Tabela 5 - Sinais de Calibração dos Circuitos Eletrônicos ............................................71
Tabela 6 - Relação de Material da Placa do Circuito do Modulador de Potência. ........87
Tabela 7 - Relação de Material da Placa do Circuito do Microcontrolador ...................88
Tabela 8 - Relação de Materiais do Circuito dos Transdutores de Pressão................. 89
xiii
LISTA DE SIGLAS
TTL
EEPROM
PIC
Led
Lógica Transistor-Transistor.
Eletric Erasable Programmable Read Only Memory.
(Controlador com Interface para Periféricos) Peripherical Interface
Controller.
Light-emitting diode.
xiv
LISTA DE SÍMBOLOS
Nm3/hkgmrpmcmmA°CkPaVhΩ
W
A
bps
Normal metro cúbico por hora
kilograma.
metro.
rotações por minuto.
centímetros.
miliampère.
graus Celsius.
kilopascal.
Volt.
hora.
Ohm.
Watt.
Ampère.
bits per second.
xv
RESUMO
Este projeto define a construção de um sistema de proteção anti-surge para
compressores de ar de pequeno porte. Tem a finalidade principal de reduzir os custos
dos equipamentos auxiliares fornecidos com a máquina mantendo as características
básicas de alta velocidade de resposta e segurança operacional dos sistemas desta
natureza. O sistema proporciona uma monitoração da pressão da descarga, pressão
de sucção e fluxo de ar fornecido pela máquina e caso o fluxo caia abaixo dos valores
críticos para a operação da máquina efetua o desligamento da mesma, para protegê-la
de avarias mecânicas.
O hardware é composto basicamente de três circuitos eletrônicos, o primeiro é
para os sensores de pressão que permite a normalização dos sinais fornecidos por
eles, o segundo é para monitorar e controlar a máquina através de um microcontrolador
e por fim um circuito chaveador de potência para acionar o motor.
Os circuitos
analógicos dos sensores, além de amplificarem os sinais fornecidos por eles, permitem
padronizá-los para serem enviados ao microcontrolador. O microcontrolador lê os
sinais do processo, envia os dados a um software supervisório e executa um algoritmo
de controle. O circuito de potência faz o acionamento elétrico de parada e partida do
motor do compressor.
O software supervisório proporciona uma leitura dos dados da máquina. Permite
também que os dados relativos às margens de segurança de operação do sistema
sejam programados no microcontrolador sem que para isto seja utilizado um outro
hardware ou software específico, muitas vezes inexistentes na área de operação. Isto
torna esta operação mais ágil. Ele possibilita também ao operador visualizar o mapa de
surge do compressor on-line para facilitar a visualização das condições operacionais da
máquina. Permite também obter um histórico de dados de determinados horários e
ainda resgatar os momentos em que a máquina entrou em condição de operação
insegura .
xvi
ABSTRACT
This paper details the development of an Anti-Surge Protection System for small
air compressors. Its final purpose is to reduce the costs with auxiliary devices delivered
with these machines. It keeps the same high speed performance and operational
security needed in these systems.
This system allows the operator to watch the discharge pressure, suction
pressure and still monitoring the air flow of the machine and if necessary shutting it
down safely if the flow falls down to critical values where normal operation is no longer
possible, avoiding mechanical damages on it.
The hardware is composed basically of three electronic circuits. The first one
converts the signals given by the pressure sensors in to a standard range. The second
one is for monitoring and to control the machine with a microcontroller and at least a
power circuit to drive its motor. The analog circuits of the sensors amplify its signals and
standardize then before they are sent to the microcontroller. The microcontroller reads
these signals, send then to a supervisory software and still performs an algorithm of
control while the power circuit drives the machine’s motor stopping and starting it up as
necessary.
The supervisory software gives an actual reading of the machine’s data. It allows
people to program the microcontroller, sending data related to the anti-surge control line
of the machine. So, it is not necessary to have another specifics software and hardware
to program the microcontroller at field. This makes that operation easier. It also allows
the operator to see the surge map on-line to make easier the operation of the machine
and finally records the data on an established period and in the moments when the
machine worked in critical conditions.
.
xvii
xviii
1
1.
INTRODUÇÃO
1.1. Histórico
O Surge em compressores centrífugos pode levar uma indústria a ter sérios
problemas. Atualmente pequenas máquinas, cujas vazões estão na casa de 10.000
Nm3/h, possuem rotores que giram a velocidades altíssimas, da ordem de 40.000 rpm.
Este fenômeno pode afetá-las, levando-as a condições críticas que requerem ações
muito rápidas para se evitar maiores danos.
Para se ter uma idéia de sua força
destrutiva, vejamos o relato a seguir de um ensaio de uma máquina rotativa.
“No início de 1985, a empresa Test Devices Incorporation estava procedendo a
um teste com um rotor de um compressor de massa 270 kg e raio de 0,38 m. Quando
o rotor atingiu a velocidade de 14.000 rpm, os engenheiros ouviram o som de uma
pancada abafada vindo da sala de testes. Esta era composta de um revestimento de
aço fixado com parafusos, no seu interior uma parede feita de tijolos de chumbo e
revestimento próprio para contenção. Em caso de explosão, esperava-se que os tijolos
macios de chumbo capturassem os pedaços de forma que ruptura pudesse ser
analisada. Após as investigações os fatos apurados foram: Os tijolos haviam sido
atirados para fora da sala de testes, uma porta da sala arremessada para o
estacionamento vizinho, um tijolo de chumbo foi atirado do local de teste atravessando
a parede de uma cozinha vizinha , as vigas da estrutura do prédio onde foi realizado o
teste haviam sido danificadas, o piso de concreto abaixo da câmara de teste havia sido
empurrado para baixo aproximadamente 0,5 cm e o revestimento de aço de 900 kg
havia sido arremessado para cima, atravessado o teto e depois bateu de volta no
equipamento de teste. Cálculos efetuados mostraram que a quantidade de energia
liberada foi de 2,1 x 107 Joules. Estar perto desta explosão era como estar perto de
uma bomba explodindo”. (Halliday, 2002)
O surge descontrolado pode fazer com que momentaneamente um compressor
altere sua velocidade bruscamente e, com isto, uma condição semelhante à descrita
acima pode ser atingida.
2
1.2. O “Surge”: Um Fenômeno a Ser Evitado
Alguns compressores comprimem um gás através da redução do volume da
câmara onde ele se encontra, tais compressores chamados alternativos não entram em
“surge”.
Outros compressores comprimem um gás acelerando-o a uma alta velocidade
com um conjunto rotativo e então fazendo com que suas velocidade decresça em uma
parte não rotativa, ocorre então um aumento da pressão do gás. Compressores deste
tipo são chamados de turbo - compressores ou compressores centrífugos. Este tipo de
compressor apresenta um sério problema à medida que a relação de compressão
aumenta, isto é, a relação entre a pressão do gás na descarga e a pressão na sucção
do compressor. Com uma relação de compressão elevada e vazão reduzida, esta
vazão torna-se seriamente instável e pode até reverter completamente no interior do
compressor. Esta condição chamada de “surge”, perturba o equilíbrio de forças dentro
do compressor, e pode jogar as partes rotativas contra as estáticas podendo como
visto no histórico não apenas destruir a máquina, como até causar sérios danos em
tudo ao seu redor. O “surge” em pequena escala pode reduzir a eficiência da máquina
danificando a selagem interna da mesma.
O surge em pequena escala pode não ocorrer em todas as partes de um
compressor. Por exemplo, devido à velocidade do gás ser menor próximo às paredes
do elemento rotativo e maior no seu centro a ocorrência do surge pode se dar nesta
área, enquanto no centro o gás ainda está seguindo o seu caminho normal. Esta
ocorrência em pequena escala se manifesta da seguinte forma:
•
Periódicas pulsações na vazão que podem ocorrer durante um período de 0,2
segundos;
•
Pulsações periódicas na pressão de descarga principalmente se a medição
ocorrer próximo à descarga do compressor;
•
Aumento do nível de vibração axial e radial da máquina;
•
Aumento na temperatura de descarga.
3
No surge em pequena escala a vazão do gás oscila em alta freqüência ou
aleatoriamente dentro de um limite estreito de vazão a uma pressão praticamente
constante.
O Surge em grande escala é facilmente identificável. Tipicamente, a vazão cai
drasticamente de forma repentina, as válvulas de retenção da descarga batem e o
compressor é parado pelo sistema de proteção por alta vibração, sobre-velocidade ou
um pouco mais tardiamente por alta temperatura na descarga. A menos que as
condições de operação que levaram o compressor ao surge sejam corrigidas, a
ocorrência será repetitiva, variando da ordem de 1 a alguns segundos. Isto ocorre
porque após o surge, a pressão na descarga do compressor diminui, a vazão interna
do gás se restabelece, permitindo que o compressor volte a comprimi-lo. No entanto,
uma vez que a pressão de descarga aumente novamente o surge volta a acontecer,
este ciclo então se repetirá indefinidamente. O surge em alta escala se manifesta como
descrito a seguir:
•
A pressão aumenta e a vazão cai, porque o consumo é menor que o limite
mínimo de vazão;
•
A vazão rapidamente reverte a uma pressão constante porque não há consumo;
•
A vazão reversa diminui a pressão na descarga, agora o gás no interior do
compressor encontra um caminho para seguir;
•
A vazão normal se restabelece repentinamente.
Em observações efetuadas ao longo dos anos, verificou-se que o surge em
pequena escala ocorre quando a vazão através do compressor está próxima de 10%
da vazão mínima do compressor para compressores de pequena relação de
compressão como, por exemplo, 1,2 / 1, em casos onde a relação de compressão é
maior, praticamente não se observa o surge em pequena escala apenas o surge em
alta escala. Razões que podem levar o compressor ao surge:
•
Queda de pressão na sucção do compressor por falha no abastecimento;
•
Estrangulamento da entrada do compressor;
•
Compressor recebe gás de outro compressor que parou;
•
Queda da rotação do compressor;
•
Queda no peso molecular do gás a ser comprimido;
•
Aumento na temperatura do gás a ser comprimido;
•
Sujeira interna ao compressor;
•
Vazamento na selagem interna entre os estágios do compressor;
•
Presença de líquidos nos caminhos inter-estágios de compressão.
4
De todas as razões anteriormente descritas, a mais crítica em caso de pressão
de sucção constante e pressão de descarga constante é a queda da rotação do
conjunto rotativo. É a que mais rapidamente pode levar a máquina ao surge em alta
escala. De fato, uma repentina redução de velocidade é o mais sério problema que um
sistema anti-surge tem que enfrentar. Por comparação, o fechamento repentino de uma
válvula de sucção ou descarga, ao contrário do que possa parecer é um problema
relativamente simples de resolver.
Para que se possa iniciar um projeto de uma malha anti-surge, tem-se que ter
em mãos um mapa de “performance” do compressor onde é estabelecida a linha de
limite de surge. Este mapa define exatamente qual a capacidade do compressor para
cada velocidade do mesmo e vazão, desde que sejam mantidas a composição do gás
e a sua temperatura constantes. Várias variáveis podem ser usadas como indicadoras
de capacidade de compressão da máquina, mas as mais comuns são:
•
Relação ente a pressão de descarga e a pressão de sucção (P2/P1);
•
Pressão de descarga (P2) se a pressão de sucção for constante;
•
Pressão de sucção (P1) se a pressão de descarga for constante.
Da mesma forma, para indicar a vazão instantânea da máquina são usuais:
•
A vazão standard. (Sem qualquer correção de pressão e temperatura.);
•
A vazão volumétrica. (Com correção de pressão ou pressão e temperatura).
Um mapa típico mostra muitas linhas de velocidade em “rpm” para máquinas
com velocidade variável, ou linhas que indicam a abertura da válvula de sucção em
“graus” para máquinas com velocidade fixa, o comportamento de ambas é idêntico.
Estas linhas estão relacionadas com o eixo X e com o eixo Y do gráfico. Com a queda
da vazão as linhas de “rpm” ou “graus” terminam em uma linha denominada linha de
Limite de Surge. Esta linha representa o menor valor de vazão a partir de onde se
espera que a máquina entre em surge de pequena escala. Os compressores de ar,
como no caso estudado neste projeto, normalmente possuem a pressão de sucção
constante, a atmosférica; isto é: nos casos onde os filtros de sucção apresentam
pequena queda de pressão. Normalmente os gráficos relacionam a pressão de
descarga configurada como eixo Y, e vazão standard ou pressão diferencial do
elemento de medição de vazão configurada no eixo X, também é notório que estes
tipos de compressores sejam acionados por motor elétrico e que sua capacidade seja
controlada através da abertura da válvula de sucção ou da velocidade do motor, o que
5
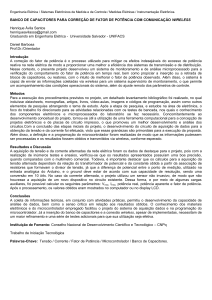
os torna mais econômicos. Na figura 1,(Mannesmann-Demag, s.d.), pode-se ver um
mapa de desempenho típico de uma máquina de pequeno porte.
Pressão de Descarga ou
Relação de Compressão
Linha de
limite de
Surge
Curvas para cada
velocidade da
máquina ou
abertura da válvula
de sucção.
100% velocidade nominal ou
90% ou 40°
100° abertura da válvula.
95% ou 60°
Vazão
Instantânea ou
Diferencial de
Pressão
Fig. 1 - Mapa de Desempenho.
1.3. Objetivo do Projeto
Para efetuar a proteção anti-surge de um compressor de ar de instrumento de
pequeno porte, foi desenvolvida uma malha de controle que monitora a pressão de
sucção da máquina, a pressão da descarga e a sua vazão instantânea continuamente.
Os fabricantes destes sistemas após análises determinaram que o tempo
mínimo de resposta deste sistema deve ser de 50 milissegundos. Por isso, uma vez
que seja detectado que a máquina está se aproximando da região do “surge”, será
acionado um aviso na tela do supervisório e se ocorrerem dois “surges” na máquina
haverá o desligamento da mesma. Há ainda o desligamento da máquina se ocorrer
uma obstrução na entrada da mesma fazendo com que a pressão de sucção venha a
cair abaixo de um valor programado.
Um sistema supervisório mostra as condições operacionais do compressor, mas
o controle e os cálculos da malha anti-surge são efetuados em um circuito
microcontrolador, que possui uma rotina dedicada, maior velocidade de atuação e sem
interferência do elemento humano.
6
As medições são efetuadas por elementos medidores de pressão instalados na
sucção e na descarga da máquina. Um medidor de pressão diferencial é instalado em
uma restrição na descarga da máquina de forma a se poder obter uma indicação da
vazão instantânea na máquina.
Vazão pode ser definida como a quantidade de material que passa por uma
determinada seção em certo intervalo de tempo, ou seja, é o produto da velocidade
pela área da seção por onde o material escoa. Quando esta velocidade é expressa em
unidades de massa, tem-se a vazão mássica e caso seja expressa em termos de
volume tem-se a vazão volumétrica. Existem vários métodos para se medir a vazão, a
escolha por um deles se fará levando em conta os seguintes fatores: natureza do
material, volume, precisão e controle exigido.
Os medidores de pressão diferencial medem a vazão baseada na pressão
diferencial gerada por uma restrição inserida em uma tubulação. Os medidores de
pressão diferencial podem ser desde um simples tubo em “U”, medidores indutivos,
capacitivos ou outros tipos. A relação entre a pressão diferencial e a vazão é dada pela
equação básica (1) do cálculo da vazão com base no diferencial de pressão.
Q= k (∆p)0, 5
(1)
onde:
•
Q = Vazão instantânea do compressor.
•
K = Constante que reúne fatores de cálculo de vazão.
•
∆p = Diferencial de pressão no elemento sensor de vazão.
Os valores da pressão de descarga e sucção do compressor também são
indicados pelo sistema supervisório onde são inseridos os valores mínimos de vazão
instantânea e de pressão de sucção para o desligamento da máquina. Valores estes
determinados pelos valores operacionais da máquina e da sua curva de desempenho.
7
1.4. Divisão do projeto
O projeto consiste de várias etapas, a saber:
•
Levantamento de dados junto a uma máquina real,
•
Elaboração de um cronograma de execução,
•
Pesquisa dos sensores de pressão,
•
Desenvolvimento dos circuitos para os sensores,
•
Testes e calibração,
•
Estudo do microcontrolador,
•
Escolha de um microcontrolador adequado,
•
Desenvolvimento do circuito para o microcontrolador e sua interface com
o microcomputador,
•
Elaboração do firmware,
•
Desenvolvimento de um circuito de acionamento de potência adequado
ao motor que se vai usar,
•
Teste do circuito de acionamento junto com o motor,
•
Programação e testes do microcontrolador,
•
Estudo de técnicas de software para supervisório,
•
Desenvolvimento do software supervisório,
•
Realização de testes conjuntos,
•
Configurações e resultados finais,
•
Elaboração do manual do usuário,
•
Elaboração do manual de manutenção.
2.
ESTUDO TEÓRICO
2.1. O Compressor de ar VK
Este compressor possui três impelidores que giram a uma rotação de,
aproximadamente, 36.000 rpm. O primeiro, de maior tamanho, possui na sua entrada, uma
válvula de estrangulamento da sucção para controle da capacidade do compressor. A
entrada da válvula está conectada com a atmosfera através de um filtro de poeira. O ar
comprimido no primeiro estágio, sofre aquecimento e é resfriado através de um trocador
de calor ar/água onde tem sua temperatura diminuída para 40°C, aproximadamente, de
acordo com a capacidade da máquina e da temperatura ambiente. O segundo rotor recebe
o ar comprimido pelo primeiro, efetua uma nova compressão, devolve o ar para um
segundo trocador de calor semelhante ao primeiro e o envia para o terceiro impelidor. Este
último efetua a compressão final do gás. A partir de então o ar já está com uma pressão
de 6 bar. A medição de vazão é efetuada após o filtro de poeira na entrada do ar. Através
de uma restrição ali instalada é medida a diferença de pressão e de acordo com o valor do
fator k estabelecido pelo fabricante é obtida a vazão instantânea do compressor.
O sistema de proteção anti-surge, serve como proteção para evitar que a máquina
entre na região instável de operação. Uma vez atingida esta condição dificilmente uma
máquina retorna a sua função normal, porque esta é uma condição extrema de trabalho, e
a máquina que a atingir deverá ser retirada de operação, quer sendo colocada em reciclo
ou parando-a.
Para condicionar este sistema, em sua primeira operação, a máquina deverá ser
colocada em condição de teste. Isto é feito, mediante o posicionamento da válvula de
sucção em posições diversas, ou mediante a alteração da velocidade da máquina,
qualquer que seja o modo de ajuste de capacidade da mesma. Então, a máquina é levada
para uma condição operacional próxima ao ponto em que entraria em surge e seus dados
de pressão de descarga, vazão instantânea, e velocidade são anotados para que depois
seja montada a curva como mostrado na Figura1.
9
2.2. Sistemas Supervisórios
O sistema supervisório aqui desenvolvido fornece ao operador da máquina,
informações sobre as condições operacionais do compressor relacionadas à sua curva de
performance. Com ele pode ser vista a curva de performance da máquina “on line”, suas
condições de pressão de sucção, descarga, vazão instantânea, e sua curva de controle de
surge.
Consiste de uma tela de visualização e uma tela de programação. Na tela de
configuração, são fornecidos os dados que posteriormente são enviados ao hardware da
máquina. Estes dados que foram obtidos após a execução dos testes com a máquina logo
após a sua entrada em operação são gravados no circuito integrado encarregado de
efetuar a proteção de máquina.
Os sistemas supervisórios, também são utilizados para fornecer dados anteriores
aos atuais. Com isso, pode-se ter um histórico das condições em que a máquina se
encontrava anteriormente ao “surge”. Os dados também podem ser manipulados de forma
a fornecer ao operador da máquina informações que levem a preveni-lo de que alguma
situação de operação anormal esteja ocorrendo. Na Figura 2, (Unicenp- Informática
Industrial, 2004), pode-se ver uma tela de um sistema supervisório normalmente utilizado
pela indústria.
Fig. 2 - Tela de sistema supervisório.
10
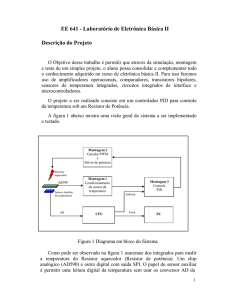
As telas dos sistemas supervisórios são partes de um sistema denominado de
IHM(Interface Homem Máquina), onde o operador pode não só efetuar a monitoração de
um processo como também interagir com ele. Estes sistemas podem partir de uma
pequena estação de controle e se tornar um sistema gigantesco, com várias estações
interligadas
aos mais diversos dispositivos, como por exemplo: PLC’s e sistemas
corporativos de uma indústria. Na Figura 3, (Unicenp- Informática Industrial, 2004), podese ver um sistema supervisório interligado a uma rede corporativa.
Sistema Corporativo
Fig. 3 - Sistema supervisório interligado ao chão de fábrica e ao sistema corporativo.
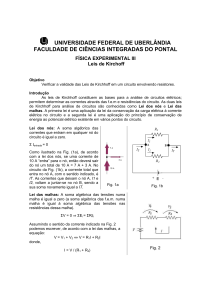
Através da IHM, pode-se ver o histórico do processo, como se fossem cartas de
registro de variáveis, como pode ser visto na Figura 4, (Unicenp-Informática Industrial,
2004); e, atuar no sistema para poder alterar sua condição operacional, como na Figura 5,
(Unicenp-Informática Industrial, 2004). Esta atuação pode ser executada também através
de dispositivos de campo, um hardware específico, quando for necessário que seu acesso
esteja disponível em caráter emergencial, como no caso de uma botoeira de parada
automática da máquina. Entretanto, na maioria dos casos, a IHM deve fornecer meios
11
para que se consiga efetuar as ações mais sofisticadas no equipamento, como por
exemplo: ajustes de carga ou avaliação de seu desempenho. Alguns níveis de alarme
também podem ser programados para avisar quando certos parâmetros foram atingidos,
desta forma, pode-se estar continuamente avaliando o processo.
Fig. 4 - Gráfico de registros de variáveis.
Fig. 5 - Tela de operação do equipamento.
12
2.3. Monitoração
2.3.1.
Transmissores
Os transmissores são sensores destinados a fazer a conversão de um sinal de
processo que se deseja medir, em um sinal elétrico que pode ser conectado a um
dispositivo de hardware que possa fazer o tratamento e conversão deste sinal em valores
que possam ser mostrados em um sistema de controle ou monitoração. No nosso caso,
utiliza-se três medidores de pressão, dois de pressão manométrica e um de pressão
diferencial, um transmissor industrial pode ser visto na Figura 6, ( Smar, 2004 ).
A precisão global de uma medição de pressão depende de muitas variáveis. Os
transmissores de pressão utilizados pela indústria são robustos, de forma a serem imunes
aos sinais de ruído que lá estão presentes.
Fig. 6 -Transmissor de Pressão Manométrica Industrial.
13
2.3.1.1.O Sensor do tipo Capacitivo
2.3.1.1.1.Instalação
Embora os transmissores utilizados pela indústria tenham um desempenho de alto
nível, uma instalação adequada é necessária para aproveitar ao máximo os benefícios
oferecidos. De todos os fatores que podem afetar a precisão dos transmissores, as
condições ambientais são as mais difíceis de controlar. Entretanto, há maneiras de se
reduzir os efeitos da temperatura, umidade e vibração.
Os transmissores possuem em seu circuito um sensor para compensação das
variações de temperatura. Na fábrica, cada transmissor é submetido a vários ciclos de
temperatura e as características do sensor sob diferentes temperaturas são gravadas na
memória do sensor. No campo, o efeito da variação de temperatura é minimizado devido a
esta caracterização. Os efeitos devido à variação de temperatura podem ser minimizados
montando-se o transmissor em áreas protegidas das mudanças ambientais. Em ambientes
quentes, o transmissor deve ser instalado de forma a evitar ao máximo a exposição direta
aos raios solares. Deve-se evitar a instalação próxima de linhas ou vasos com alta
temperatura. Deve-se usar trechos longos de linha de impulso entre a tomada de pressão
e o transmissor sempre que o duto operar com fluidos em alta temperatura. Quando
necessário, usar isolação térmica para proteger o transmissor das fontes externas de
calor.
A umidade é inimiga dos circuitos eletrônicos. Em áreas com altos índices de
umidade relativa deve-se certificar da correta colocação dos anéis de vedação das tampas
da carcaça. Deve-se procurar não retirar as tampas da carcaça no campo, pois cada
abertura introduz mais umidade nos circuitos. O circuito eletrônico é revestido por um
verniz à prova de umidade, mas exposições constantes podem comprometer esta
proteção. Também é importante manter as tampas fechadas, pois, cada vez que elas são
removidas, o meio corrosivo pode atacar as roscas da carcaça que não estão protegidas
14
por pintura. Recomenda-se o uso de fita de teflon ou vedante similar nas conexões
elétricas para evitar a penetração de umidade. Embora um transmissor seja praticamente
insensível às vibrações, devem ser evitadas montagens próximas a bombas, turbinas ou
outros equipamentos que gerem uma vibração excessiva. Caso seja inevitável, a
instalação do transmissor deve ser executada em uma base sólida e com a utilização de
mangueiras flexíveis que não transmitam vibrações. Deve-se evitar também instalações
onde o fluido de processo possa congelar dentro da câmara do transmissor, o que poderia
trazer danos permanentes à célula capacitiva.
Procurar evitar a passagem da fiação de sinal por rotas que contêm cabos de
potência ou comutadores elétricos. As roscas dos eletrodutos devem ser vedadas
conforme método de vedação requerido pela área. A passagem não utilizada deve ser
vedada com bujão e vedante apropriado.
A fonte de alimentação de um transmissor de pressão, normalmente é de corrente
contínua e o seu circuito de instalação pode ser visto na Figura 7, (Smar, 2004). O
transmissor trabalha com o sistema a 2 fios, isto é, a mesma fiação utilizada para
alimentação serve para a transmissão do sinal. O consumo quiescente do transmissor é
de 3,6 mA e durante a operação o consumo pode chegar a 21 mA, dependendo do estado
da medida e do sensor.
Fig. 7 - Circuito de alimentação elétrica de um transmissor industrial.
A tensão de alimentação pode variar de acordo com o gráfico da Figura 8, (Smar,
2004), em relação à resistência de carga do circuito em que o transmissor estiver inserido,
15
isto se deve ao fato que os transmissores industriais mais tradicionais do mercado fazem a
conversão das grandezas medidas em sinais de corrente elétrica. Apesar de que
atualmente já existam transmissores que utilizem protocolos de comunicação digitais,
contudo mesmo neste caso, estes valores são respeitados para que seja mantida a
funcionalidade do transmissor em qualquer ambiente de hardware.
Fig. 8 - Tensão de alimentação de um transmissor de acordo com a carga.
2.3.1.1.2. Funcionamento do Sensor Capacitivo
O sensor de pressão mais tradicional utilizado pelos transmissores de pressão
industriais
são
do
tipo
capacitivo
(célula
esquematicamente na Figura 9, (Smar, 2004), onde:
.
capacitiva),
conforme
mostrado
16
Fig. 9 - Célula Capacitiva.
P1 e P2 são pressões aplicadas nas câmaras H e L.
CH = capacitância medida entre a placa fixa do lado de P1 e o diafragma sensor.
CL = capacitância medida entre a placa fixa do lado de P2 e o diafragma sensor.
d = distância entre as placas fixas de CH e CL.
∆d = deflexão sofrida pelo diafragma sensor devido à aplicação da pressão
diferencial DP = P1 - P2.
Sabe-se que a capacitância de um capacitor de placas planas e paralelas pode ser
expressa em função da área (A) das placas e da distância (d) que as separa como na
equação (2):
(2)
Onde,
Є = constante dielétrica do meio existente entre as placas do capacitor.
17
Se considerar CH e CL como capacitâncias de placas planas de mesma área e paralelas,
quando P1 > P2, tem-se as equações 3 e 4 para a capacitância CH e CL:
(3)
(4)
Por outro lado, se a pressão diferencial (∆P) aplicada à célula capacitiva, não
defletir o diafragma sensor além de d/4, podemos admitir ∆P proporcional a ∆d, ou seja na
como na equação (5):
(5)
Se desenvolvermos a expressão (CL-CH) / (CL+CH), obter-se-á, a equação (6) :
(6)
como a distância (d) entre as placas fixas de CH e CL é constante, percebe-se que a
expressão (CL-CH) / (CL+CH) é proporcional a ∆d e, portanto, à pressão diferencial que
se deseja medir. Assim, conclui-se que a célula capacitiva é um sensor de pressão
constituído por dois capacitores de capacitâncias variáveis, conforme a pressão diferencial
aplicada.
2.3.1.1.3. Funcionamento do Circuito em Blocos
O Diagrama de blocos do transmissor, como mostra a Figura 10,(Smar, 2004),
ilustra esquematicamente o funcionamento do circuito. O conversor eletrônico da célula
capacitiva gera uma freqüência, que é função da capacitância do sensor.
18
A Unidade Central de Processamento (CPU) é a parte inteligente do transmissor,
responsável pelo gerenciamento e operação dos outros blocos, linearização e mais
algumas funções auxiliares. O programa é armazenado em uma memória PROM. Para
armazenamento temporário dos dados, a CPU tem uma memória RAM interna. Caso falte
energia, estes dados armazenados na RAM são perdidos. A CPU possui uma memória
interna não volátil (EEPROM) onde dados que devem ser retidos são armazenados.
Exemplos de tais dados: calibração, configuração e identificação de dados. A EEPROM
permite 10.000 gravações na mesma posição de memória.
Fig. 10 - Diagrama em blocos de um transmissor de pressão.
Os sinais de controle da CPU são transferidos através do acoplador óptico, e
convertidos em sinais elétricos analógicos e digitais simultaneamente para que possam
ser lidos pelo hardware de monitoração e controle da máquina.
Existe uma memória EEPROM que está localizada na placa do sensor. Ela contém
dados pertencentes às características do sensor para diferentes pressões e temperaturas.
Como cada sensor é caracterizado na fábrica, os dados gravados são específicos de cada
sensor. O conversor D/A converte os dados digitais da CPU para sinais analógicos com 15
bits de resolução.
19
O Controlador de Display recebe os dados da CPU acionando os segmentos do
Display de cristal líquido. O controlador ativa o backplane e os sinais de controle de cada
segmento.
Ajuste Local: são dois sensores magnéticos que são ativados através de uma
chave de fenda imantada, sem nenhum contato externo, tanto elétrico quanto mecânico.
Embora estes tipos de transmissores sejam os que predominem no mercado, no
entanto, devemos levar em conta sua velocidade de resposta que deve ser
suficientemente rápida para que a resposta do sistema não seja prejudicada pela
morosidade na conversão das medidas.
2.3.1.2.
O Sensor Piezo-Resistivo
Para o sistema desenvolvido deste projeto o sensor utilizado é o modelo MPX53DP
fabricado pela Motorola que pode visto na figura 11, ( Motorola,1997).
Fig. 11 - Sensor Piezo-Resistivo da Motorola.
O sensor piezo-resistivo, que utilizamos no circuito, diferentemente dos sensores
capacitivos utilizados atualmente no mercado, possui um conversor analógico de sinal, o
20
que o torna mais adequado à nossa aplicação. Os sensores capacitivos como os
anteriormente vistos e outros tipos, a exemplo do sensor com pastilha de silício
ressonante da Yokogawa, apesar de serem robustos e especialmente desenvolvidos para
o uso industrial, pecam por sua excessiva lentidão, uma vez que possuem um
processador interno que realiza uma série de funções, como por exemplo, auto-calibração,
alteração remota de faixa de trabalho e transmissão digital simultânea com a transmissão
analógica. Isto faz com que seu atraso na propagação de alteração da grandeza medida
na sua entrada seja da ordem de 200 milissegundos, o que os torna muito lentos para
nossa aplicação que requer 50 milissegundos. Existem fabricantes cujos transmissores
têm alta velocidade de resposta aos estímulos, mas a preços proibitivos, da ordem de 10
mil dólares.
O circuito desenvolvido, totalmente analógico, é composto de amplificadores
operacionais e está previsto o seu funcionamento de um painel metálico e aterrado, com
temperaturas dentro de uma faixa de 15 a 30°C, para as quais não está se prevendo
compensação de temperatura ambiente para o sensor.
O sensor de silício piezo-resistivo, foi desenvolvido para as aplicações mais
diversas, como descrito a seguir:
•
Controle de movimentação de ar;
•
Sistemas de controle de meio-ambiente;
•
Indicadores de nível;
•
Detecção de vazamentos;
•
Instrumentação Medicinal;
•
Controles Industriais;
•
Interface de Sistemas de controle Pneumáticos e
•
Robótica.
21
O circuito eletrônico do elemento sensor é bastante simples, como pode ser
observado na Figura 12, (Motorola, 1997), o que permite que seja conectado diretamente
a um amplificador diferencial.
Fig. 12 - Disposição circuito interno do sensor piezo-resistivo.
A tensão diferencial gerada no sensor é diretamente proporcional ao diferencial de
pressão a ele aplicado. O diferencial de tensão aumenta com o aumento do diferencial de
pressão entre a entrada P1 em relação à entrada P2. Com isto, tanto pode ser aplicado
um acréscimo de pressão na entrada P1, como um valor de vácuo na entrada P2.
22
Fig. 13 - Disposição física do sensor MPX53DP.
Segundo o datasheet, ( Motorola, 1997), este dispositivo da Figura 13, gera uma
saída muito precisa e linear diretamente proporcional à pressão nele aplicada. Este sensor
de baixo custo relega aos desenvolvedores implementar suas próprias maneiras de
compensar os desvios causados pela alteração da temperatura ambiente. Sua execução é
fácil, porque os gráficos de desvio com a temperatura são fornecidos pelo fabricante,
como pode ser visto na Figura 14, onde se tem sua curva característica.
23
Fig. 14 - Curva característica do sensor MPX53DP em relação à temperatura.
Pode-se observar pelas curvas da Figura 14, (Motorola,1997), que para pequenos
desvios de temperatura ambiente, a alteração da resposta do dispositivo será muito
pequena.
2.3.1.2.1. Funcionamento do Sensor Piezo-Resistivo
O sensor piezo-resistivo é um elemento que fornece um sinal de tensão de saída
proporcional à diferença de pressão entre as portas P1 e P2. Este dispositivo, mostrado na
figura 15, ( Motorola, 1997), utiliza um sensor tipo strain-gage construído de material
semicondutor que é sensível à posição de um fino diafragma de silício. Este diafragma é
responsável pela separação entre a câmara ligada à entrada P1 e a câmara ligada à
entrada P2. Seu deslocamento ocorre sempre que o diferencial de pressão for modificado.
Devido ao fato do strain-gage ser parte do diafragma, não há efeito de diferença de
temperatura entre ambos; embora o strain-gage em si, seja dependente da temperatura,
cujo valor deverá ser compensado se for utilizado com uma taxa de variação muita alta, da
ordem de dezenas de graus. Entretanto os circuitos compensadores podem ser
implementados utilizando-se sensores resistivos.
24
Fig. 15 - Figura do arranjo interno do sensor piezo-resistivo.
Convém ressaltar que os gráficos aqui mostrados são baseados no ar limpo e seco
como elemento a ser medido. Para outros fluidos o fabricante deverá ser consultado.
Os valores de pressão e temperatura máximos a que o sensor pode ser submetido
podem ser vistos na Tabela 1, ( Motorola,1997), são fornecidos pela Motorola.
Tabela1 - Características de pressão e temperatura do sensor.
Os valores da Tabela 1 acima são extremos a partir dos quais o sensor poderá ser
permanentemente danificado.
25
Tabela 2- Propriedades do elemento sensor piezo-resistivo da Motorola.
Na tabela da Tabela 2, tem-se os valores de operação do elemento sensor.
26
A linearidade de um elemento transdutor define como a saída do transdutor se
comportará em toda a sua faixa de operação, e qual será o seu desvio em relação a um
valor tipo como padrão. Isto é, para cada valor de pressão aplicada à sua entrada, na sua
faixa de funcionamento, qual será o valor de tensão diferencial correspondente. Existem
diversas maneiras que os fabricantes utilizam para determinar a linearidade, alguns
utilizam os pontos extremos desviados da reta média característica, outros a média
quadrática de todos os pontos desviados desta reta. A Motorola utiliza o primeiro método
como se pode ver na Figura 16, (Motorola, 1997).
Fig. 16 -Curva de linearidade do sensor MPX53DP.
Entretanto, como mencionado anteriormente, por se tratar de um circuito
experimental, não se fará a compensação de linearidade, o demandaria muito tempo e
exigiria a criação de um cálculo ou de uma tabela de correção, o que tornaria o nosso
circuito muito lento.
27
2.4. Atuadores ou Elementos Finais de Controle
Para o uso em compressores, existem alguns tipos de acionadores que podem
alterar a capacidade da máquina de acordo com o método escolhido. Estes acionadores
podem ser motores, através de inversores, turbinas através de governadores hidráulicos
ou válvulas pneumáticas com acionadores a diafragma e mola.
2.4.1. Motores
Os motores de indução que são os mais comumente utilizados na indústria,
normalmente trifásicos, possuem uma vasta gama de variação de aplicações e seu
funcionamento é do conhecimento de básico dos que trabalham na área técnica. Vale
ressaltar que para alterar sua velocidade, normalmente são utilizados inversores que são
bem mais eficientes.
Eles podem ter sua velocidade alterada dentro de uma pequena faixa de valores,
normalmente dentro da casa dos 10 a 15 % em torno da velocidade nominal, quando
fazem parte de um sistema anti-surge, pois como vimos anteriormente, a variação de
velocidade neste tipo de máquina, embora auxilie enormemente no controle de
capacidade, é um dos maiores problemas com o qual este tipo de controle pode se
deparar. Inversores de corrente alternada são dispositivos que alteram a freqüência da
tensão fornecida para os motores, com isto, alterando a sua capacidade de desenvolver
trabalho e por conseqüência alterando a sua velocidade. No nosso caso, utilizou-se o
módulo PWM do microcontrolador PIC para ligar e desligar o motor, uma vez que este não
possui um inversor de freqüência.
28
2.4.2. Válvulas de Controle
Válvulas de Controle são geralmente divididos em dois grandes grupos de atuação:
Rotativas e de Deslizamento de Haste (linear);
Rotativas: são válvulas onde o eixo da válvula gira em torno de si mesmo,
possibilitando o obturador mover-se em ângulo, na área de vedação (sede), manipulando
a vazão controlada. Exemplos: válvulas tipo esfera, borboleta e de obturador excêntrico.
Um exemplo típico deste tipo de válvula pode ser visto na Figura 17 ( Fisher, s.d.).
Fig. 17 - Válvula Rotativa, do tipo borboleta.
Deslizamento Positivo ou de Deslocamento Linear: são válvulas onde a haste do
obturador desliza em movimento linear na área de vedação, controlando a vazão, pela
abertura ou fechamento da passagem do fluido pela sede. Exemplos: válvulas tipo globo,
gaveta, faca, diafragma. Este tipo de válvula pode ser visto na Figura 18,( Fisher, s.d.).
29
Fig. 18 - Válvula de Deslocamento Linear.
Para o uso em sistemas anti-surge de pequenas máquinas as válvulas mais
utilizadas são as válvulas rotativas do tipo borboleta, por proporcionarem uma menor
perda de carga no sistema e por terem normalmente uma atuação mais rápida, devido ao
equilíbrio de forças em seu interior ser mais estável e normalmente tendendo a zero.
São válvulas cujo melhor ponto de controle ocorre entre 20 – 50 graus de rotação,
ficando o limite de 70 graus para controle. São simples de instalar e operar e requerem
baixo torque de acionamento.
Seu atuador é normalmente posicionado pneumaticamente, mas há casos onde
possuem acionamento motorizado, obviamente devido ao seu acionamento bastante lento,
os acionadores motorizados não são utilizados para sistemas anti-surge. Os acionadores
pneumáticos possuem a vantagem de ter retorno à posição de repouso, por mola. Isto é
uma grande vantagem em relação a uma válvula motorizada porque em caso de falha da
energia auxiliar de posicionamento da válvula, esta irá para a sua posição de repouso
rapidamente. Um atuador pneumático pode ser visto na Figura 19,(Fisher, s.d.).
30
Fig. 19 - Atuador de Ação Direta com retorno por mola.
Outra característica importante é que possuem limites de curso mecânico, para
que se possa fazer a limitação da abertura ou fechamento da válvula, quando isto for
necessário e volantes de atuação manual que são disponíveis para que as válvulas
possam ser acionadas manualmente pelo operador em caso de pequenas falhas.
2.5. Tratamento do Sinal
Os sinais dos elementos de medição são fornecidos a circuitos amplificadores.
Neles os sinais de pressão diferencial convertidos em sinal de tensão diferencial, serão
condicionados a valores dentro de uma faixa padrão de trabalho que deverá ser de 0 a
5Vcc, esta tensão é aplicada diretamente ao microcontrolador, sem a interferência de
conversores analógico-digitais externos. Isto é feito para eliminarmos ao máximo a
31
possibilidade de interferência de ruídos quando este sistema tiver que ser utilizado em
uma área industrial.
Os sinais analógicos sofrerão uma pequena filtragem em seus circuitos de origem,
mas o seu processamento ficará a cargo do microcontrolador que faz vinte leituras da
pressão de descarga e sucção e dez leituras consecutivas da vazão e então faz a média
aritmética de todos os sinais amostrados.
Normalmente em uma área industrial os sinais são transmitidos em valores de
corrente contínua de 4 a 20 mAcc. Em cabos com isolação para 600 V ou mais, envolvidos
por uma película condutora em contato em todo o seu percurso com um cabo condutor nu.
Este condutor é ligado à malha de terra do sistema elétrico, de forma a drenar as
correntes induzidas no cabo e eliminar interferências no sinal. Este sinal, normalmente é
convertido através de um resistor de 250 ohms em um sinal de 1 a 5 Vcc, no interior do
próprio dispositivo de controle, quer seja um CLP, (Controlador Lógico Programável), ou
um outro tipo de controlador dedicado. Esta arquitetura de conversão de sinais será
mantida para tornar o sistema mais facilmente adaptável à área industrial. Isto é, uma
fonte de sinal e um circuito controlador com funcionamento totalmente independente,
como na Figura 20 .
Elemento Final
Controlador
de Controle
transmissor
Fig. 20 - Diagrama Básico de uma Malha de Controle.
32
2.6. O Microcontrolador
Os microcontroladores são diferentes dos processadores, pois integram em um
único dispositivo: cpu, memórias de programa e dados e vários periféricos como: timers,
watchdog timers, comunicação serial, conversores analógicos-digitais, geradores de PWM,
etc; o que torna a montagem final bem compacta. Os microcontroladores foram projetados
para comandarem equipamentos específicos como, por exemplo:
•
Relógios, Alarme, eletrodomésticos, brinquedos;
•
Instrumentação: estação meteorológica;
•
Automação Industrial, Automóveis.
Em geral, estes sistemas exigem um controle preciso do tempo, pois trabalham em
tempo real. As capacidades de processamento e de memória variam de acordo com a
aplicação. A aplicação pode ser um simples relógio ou um equipamento industrial
complexo que envolve até uma camada de sistema operacional executando sobre o
microcontrolador.
As principais vantagens dos microcontroladores são:
•
Baixo Custo e Consumo;
•
Reconfiguração por Software;
•
Curto tempo para desenvolvimento.
2.6.1. Família dos Microcontroladores PIC
Os microcontroladores PIC, utilizam a arquitetura RISC. O nome RISC é a
abreviação de Reduced Instruction Set Computer (Computador com Conjunto de
Instruções Reduzido).
33
Diferente da tradicional arquitetura Von Neumann, a estrutura RISC é baseada na
arquitetura Harvard, como será visto página 34. Eles têm como características, tamanhos
diferenciados entre barramento de dados e de programa, permitindo que em uma única
palavra, esteja a instrução e o operando. Existem modelos de PIC onde o barramento de
dados é de 8 bits e o de programa é de 12 bits. Com isso conseguimos compactar o
código e executá-lo em alta velocidade.
Existem várias famílias de microcontroladores de 8 bits, que se adaptam aos mais
variados projetos. Entre elas podemos citar alguns da Microchip:
O PIC 12C508 (microcontrolador de 8 pinos), 16F84 (microcontrolador de 18 pinos
com memória flash, EEPROM, RAM, e muito mais) e o 16FXXX (com mais periféricos,
como comparadores de tensão, conversor A/D, UART e outros).
2.6.2. Característica da tecnologia RISC
O alto desempenho da família de microcontroladores PIC pode ser atribuído as
seguintes características de arquitetura:
•Arquitetura
•Conceito
•Todas
Harvard;
de registrador arquivo;
as instruções com palavras simples;
•Palavra
de instrução longa (LWI - Long Word Instruction);
•Arquitetura
•Instruções
•Conjunto
de instruções em "Pipeline";
de apenas um ciclo de máquina;
de instruções reduzido.
34
2.6.3.
Arquitetura Harvard x Von Neumann
A arquitetura Von Neumann tradicional utiliza o mesmo barramento para memória
de programa e dados, como pode ser observado na Figura 21, (Gutierres, s.d.).
Fig. 21 - Arquitetura de Neumann.
A arquitetura Harvard utiliza um barramento para memória de programa e um para
memória de dados, como pode ser observado na figura 22, (Gutierres, s.d).
Fig. 22 - Arquitetura de Harward.
35
2.6.4. Ciclo de Instruções
A entrada de clock (pino OSC1 CLKIN) é internamente dividida por quatro para
gerar quatro clocks em quadratura sem sobreposição, nomeados Q1, Q2, Q3, e Q4.
Internamente o contador de programa PC é incrementado em Q1, e a instrução é retirada
da memória de programa e colocada no registrador de instruções em Q4. Ela é
decodificada e executada durante o ciclo seguinte de Q1 até Q4, como se vê na Figura 23,
(Gutierres, s.d.).
Fig. 23 - Ciclo de instrução de um PIC.
Para calcular o tempo de cada ciclo de instrução realizado, baseado no dispositivo
oscilador, por exemplo, um cristal, basta fazer o seguinte cálculo da Equação 7.
Tcy = ____1_____
( fosc / 4 )
Onde:
Tcy = Tempo de um Ciclo de Máquina.
fosc = Freqüência do oscilador.
(7)
36
2.6.5. Fluxo de Instrução/ Pipeline
Um ciclo de instrução consiste de quatro ciclos Q (Q1, Q2, Q3, Q4), figura 24,
(Gutierres, s.d ). A busca e execução são feitas em linha, de tal forma que a busca leva
um ciclo de instrução e a execução leva outro ciclo. Contudo, devido à característica de
"Pipeline", cada instrução é executada efetivamente em um ciclo, pois simultaneamente
ocorrem as execuções de uma instrução e a busca a instrução seguinte. Se a instrução
causa a alteração no contador de programa, então dois ciclos são necessários para
completar a instrução.
Fig. 24 - Execução de instruções em PIPELINE.
37
2.6.6. Palavra de Instrução Longa
Barramentos separados para instruções e dados permitem larguras de barramento
diferentes. Com isso o barramento de instruções é otimizado para uma palavra de
comprimento única. O número de bits do barramento de instruções depende de quantas
instruções são implementadas e do número de registradores disponíveis em cada família
de microcontrolador, como pode ser observado na Figura 25, (Gutierres, s.d ).
PIC 16FXXX - Instruções de 14 bits
PIC 17CXX - Instruções de 16 bits
Fig. 25 - Exemplos de tamanho de instruções de um PIC.
Esta arquitetura permite que o microcontrolador tenha um conjunto de instruções
mais simples e de menor número (apenas 35), dois formatos de instrução apenas (uma
para instruções que manipulam bits e outras para bytes), execução de uma instrução por
ciclo de máquina, pipeline de execução e busca de instruções, e amplo número de
registradores de uso geral.
38
Essa família possui uma arquitetura baseada em acumulador (o registrador W),
todas as instruções lógicas e aritméticas são referenciadas a ele. Os registradores são
divididos em duas categorias: especiais (SFR) e de propósitos geral (GPR). A maior parte
dos SFRs são usados para configurar e usar os diversos periféricos disponíveis. O
registrador de STATUS sinaliza condições especiais ocorridas durante as operações. Ele
vai ser muito útil quando iniciarmos a programação!
A memória dos PIC16 (arquitetura harward), permite realizar acessos simultâneos
às duas regiões de memória. Entretanto, a memória de dados está organizada em regiões
de endereçamentos especiais, os conhecidos bancos de memória, que são neste caso
quatro: banco 0, 1, 2 e 3, portanto se faz necessário o uso da paginação.
2.6.7. A função do Microcontrolador no Sistema Anti-Surge
O Microcontrolador é o cérebro do sistema, onde são efetuados todos os cálculos
para acionamento da máquina em tempo real. Suas principais tarefas serão:
•
Receber os sinais analógicos transmitidos pelos sensores para convertê-los
em sinais digitais.
•
Normalizar estes sinais para que estejam disponíveis para as operações
matemáticas a serem realizadas.
•
Efetuar os cálculos necessários para monitorar a condição de operação da
máquina.
•
Efetuar os acionamentos necessários em caso de anormalidade na máquina.
•
Transmitir os dados calculados para o PC e seu sistema supervisório.
•
Receber os dados levantados durante a pré-operação da máquina para
poder estabelecer parâmetros de controle, inseridos via sistema supervisório.
Os cálculos efetuados no microcontrolador deverão estabelecer o parâmetro de
segurança para qualquer ponto de operação do compressor.
39
Na Figura 26 ( Microchip, 2001), podemos ver o microcontrolador PIC16F877A de
40 pinos. Com um clock de 4 MHz, e executando uma instrução simples a cada ciclo de
máquina, nos dá um desempenho com velocidade alta o suficiente para este projeto.
Fig. 26 - Pinagem do Microcontrolador PIC 16F877.
Na Figura 27, ( Microchip, 2001), podemos ver a organização interna do PIC
16F877A. Utilizaremos três entradas analógicas, para obter os dados do compressor, e a
comunicação serial para estabelecer a comunicação com o PC.
40
Fig. 27 - Arquitetura interna do PIC 16F877A.
41
2.7.
Fluxograma Básico do Sistema Anti-Surge
Início
S
N
O Sistema está em
modo de
Operação ?
Aquisição de dados
do Compressor (PIC)
Parar o Compressor
Efetuar rotina de cálculos e
controle(PIC)
Entrar com os parâmetros levantados
N
Há risco de
“Surge ”?
Enviar dados para o
Microcontrolador (PIC)
S
S
O sistema está
ativado ”?
Emitir Alarme
e Parar o
Compressor
N
Enviar Dados para o
Supervisório
Fig. 28 - Fluxograma básico do Sistema Anti-Surge.
42
2.8. Custos Estimados
Os gastos para a execução do projeto estão distribuídos como pode ser observado
a seguir.
Tabela 3 - Custo para a execução do projeto.
Descrição
Custo em reais (R$)
Borland C++ Builder 6 professional
MicrosoftWindows XP
Sensores de Pressão
Gravador de PIC
Circuitos Eletrônicos
Cabos e Conectores
PIC 16F877A
Componentes( Resistores, Capacitores, CI)
Total
2700,00(1)
1200,00(1)
150,00
350,00
100,00
30,00
19,00
50,00
4.599,00
(1)- Custo inicial, a ser diluído com a execução de outros projetos.
43
2.9. Cronograma do Projeto
Fig. 29 - Cronograma do Projeto
44
3.
ESPECIFICAÇÃO
3.1. Hardware
3.1.1.
Funções do Hardware
O objetivo dos componentes de hardware deste projeto é:
• Efetuar as leituras contínuas das pressões de interesse;
• Converter estes valores em valores padronizados;
• Digitalizar os valores padronizados;
• Transmitir os valores de pressão para o software supervisório através de
uma porta serial via protocolo RS232;
• Calcular os parâmetros de controle da máquina;
• Efetuar o acionamento do motor do compressor.
3.1.2.
Componentes Utilizados
Os principais componentes utilizados para o hardware são:
• PIC 16F877A, microcontrolador para leitura e controle do compressor;
• MPX53DP, sensor de pressão tipo piezo-resistivo;
• MAX 232, circuito integrado para converter sinais RS232 para níveis TTL;
• LF351. amplificador operacional;
• MOC3011, circuito integrado opto-acoplador;
• TIC226D, Triac, dispositivo de controle de disparo em corrente alternada ;
• LM7805, circuito integrado regulador de tensão de 5 VDC;
• LM7809, circuito integrado regulador de tensão de 9 VDC;
• LM7909, circuito integrado regulador de tensão de -9 VDC.
45
3.1.3. Requisitos do Sistema
O sistema de medição de pressão foi calibrado dentro da faixa de operação do
compressor. Para o compressor de teste utilizaremos a calibração de 0 a 200mmHg para
o sensor de pressão de descarga, -50 a 50 mmHg para o sensor de pressão de sucção e
0 a 50 mmHg para o sensor de vazão. Entretanto, para cada sistema fornecido com uma
máquina nova, os parâmetros da máquina já são fornecidos pelo fabricante da mesma.
Para os circuitos é necessária uma fonte externa de +12 Vcc e 1 A e -12Vcc e 1 A,
entretanto como o circuito de medição requer bastante precisão, nele foram instalados
reguladores de +9 Vcc e -9 Vcc. A fonte de alimentação dos sensores, foi derivada dos
+9 Vcc regulados, com um regulador a diodo zener de 5,1 Vcc, com isto, se por um motivo
qualquer um dos sensores apresentar defeito o mesmo não se propagará para os outros
sensores e para o circuito de alimentação dos amplificadores operacionais, tornando mais
fácil a solução deste tipo de problema e o hardware mais robusto. Para o PIC16F877A e
para o circuito de comunicação MAX232, também foi desenvolvida uma alimentação de
5Vcc e 1 A conforme a necessidade destes circuitos.
46
3.1.4.
Diagrama em Blocos
Motor
Compressor
Sucção
de Ar
Descarga de ar
Sensor de
Pressão da
Sucção
Sensor de
Pressão de
Descarga
Transdutores de
Pressão Analógicos
Microcontrolador
Sensor de
Pressão
Diferencial
(Vazão)
Circuito acionamento
do motor
Microcomputador
Sinal analógico
Sinal digital
Sinal AC de potência
Fig. 30 Diagrama em blocos do Sistema Anti-Surge.
O funcionamento do hardware é descrito a seguir:
•
Os sensores medem continuamente as pressões dos pontos onde estão
instalados no compressor.
•
O circuito conversor, transforma os sinais fornecidos pelos sensores em sinais
elétricos de 0 a 5 Vcc e os envia ao microcontrolador.
•
O microcontrolador lê os sinais recebidos do circuito conversor e interpreta-os
efetuando os cálculos necessários e verificando se a máquina está dentro de
sua condição normal de operação. Ele efetua o acionamento do circuito
47
acionador do motor desde que a variáveis controladas fique dentro dos
parâmetros estabelecidos pelo operador da máquina e pelos parâmetros de
segurança do sistema, caso contrário fará o circuito de acionamento parar o
motor.
•
O microcomputador fará a supervisão do sistema disponibilizando os dados de
pressão e vazão recebidos na tela e ainda possibilitando alterações dos
parâmetros do firmware para ajuste do sistema durante a fase de testes e
ajustes da máquina (uma vez que o sistema esteja ajustado, raramente são
feitas alterações).
3.2. Software
O software supervisório é utlizado para a configuração dos parâmetros do
microcontrolador, monitoração das condições da máquina, indicação de condição de
alarme e resgate dos valores gravados de condições de operação anteriores.
A tela de interface IHM, na figura 31, tem um aspecto bastante simples. Entretanto,
desempenhará não apenas o papel de mostrar as condições de operação da máquina
como também indicar que o sistema está em condição de alarme ou de parada
automática; será também responsável por fornecer ao microcontrolador os parâmetros de
configuração do mesmo, uma vez que para cada máquina estes parâmetros devam ser
programados individualmente conforme dados específicos levantados em campo.
No campo monitoração em azul as variáveis vazão instantânea, pressão de sucção
e pressão de descarga, são mostradas.
No campo controle em bege, o status da máquina é mostrado o que indica se ela
está em operação automática ou em manual, e o indicador mostra quando o compressor
está parado (0%) ou em operação(100%). No ponteiro logo abaixo, pode-se efetuar a
parada e partida da máquina quando o status for manual.
48
No campo Comandos em cor areia, temos as opções de controle que dão opções
de operação do equipamento, ou seja, operar em manual sem a atuação da proteção, o
que é útil para a colocação do equipamento em operação. Temos a opção de operação
em automático, que é quando a proteção está ativada, a opção de configurar o sistema
que chama o formulário de configuração a opção de sair do supervisório.
A comunicação é estabelecida com o Microcontrolador via porta serial através do
botão “Ativar Comunicação”, ao seu lado podemos selecionar qual a porta de
comunicação utilizada: “COM1” ou “COM2”.Os demais detalhes podem ser vistos no
manual do usuário anexo à monografia.
Fig. 31 - Tela Principal da IHM de operação do sistema.
Uma tela de Histórico permite recuperar os registros das variáveis monitoradas e
pode ser acionada através do botão “HISTÓRICO” ao lado do indicador de data e hora do
sistema.
49
Fig. 32 - Tela de Configuração do Sistema
A tela de Configuração, Figura 32, permite alterar os parâmetros de controle do
microcontrolador para isso, está cadastrada uma senha de segurança, para permitir que
apenas pessoas autorizadas possam fazer alterações nos mesmos. Caso contrário, o
sistema retornará a tela de operação.
3.3. Requisitos
Os requisitos básicos levantados para o desenvolvimento do sistema foram:
50
• Interface simples e intuitiva;
• Mostrar as condições operacionais da máquina em uma tela apenas;
• Permitir a recuperação de dados recentes;
• Permitir a programação do microcontrolador com segurança, por pessoal
autorizado;
• Não requerer protocolos especiais de comunicação ou dispositivos de difícil
aquisição no mercado.
3.3.1.
Funções do Software
As funções do software são:
•
Monitorar o comportamento da máquina, mostrando na tela as variáveis de
controle.
•
Receber os dados transmitidos pelo microcontrolador através da porta serial.
•
Emitir sinal visual de alarme caso a máquina esteja em condição próxima ao
surge.
•
Emitir sinal visual de emergência caso a máquina entre em surge.
•
Enviar parâmetros para o microcontrolador ,através da porta serial, de forma a
permitir que este assuma novos parâmetros de controle.
•
Permitir a recuperação dos dados de operação e configuração em tempos
anteriores para detecção de possível anomalias na operação do compressor.
3.4. Ambiente de Desenvolvimento
O software foi desenvolvido em linguagem C++ com a ferramenta C++ Builder
Development Environment versão 6.0.
51
3.4.1.
Fluxograma
Na Figura 33, tem-se o fluxograma básico do software desenvolvido para o sistema.
Início
Ler parâmetros de
segurança do
microcontrolador
A
Carregar a
configuração.
S
N
Valores
conferem?
Fazer
aquisição de
dados
Emitir
aviso na
tela.
Enviar comando para desligar a maquina e entrar em modo
de configuração.
Fazer análise
dos dados.
Ler teclado
N
Há solicitação
de alteração de
modo?
Ler teclado
Alterar os
parâmetros do
microcontrolador
e gravar arquivo
de configuração.
S
Enviar comando
para alterar o
modo de controle
máquina
N
S
Configurar ?
A
Fig. 33 - Fluxograma do software de supervisão do sistema anti-surge.
52
O fluxograma da Figura 33, nos mostra o modo de monitoração do sistema
supervisório, que executa basicamente as seguintes tarefas:
•
Inicialmente,
verifica a confiabilidade dos
parâmetros de controle
do
microcontrolador, e se houver concordância com os valores armazenados no PC
coloca o sistema em modo de operação;
•
No modo operação, o sistema recebe os dados enviados pela porta serial
através da comunicação RS232, analisa os dados e os disponibiliza para
acompanhamento do operador da máquina. Se houver alguma anormalidade
envia uma mensagem e aguarda um reconhecimento via teclado;
•
Se for solicitada a parada da máquina envia mensagem ao microcontrolador que
efetuará a parada. Caso contrário, permanecerá monitorando a máquina;
•
Se for solicitada a configuração do microcontrolador, efetua a parada da
máquina e envia os parâmetros de configuração ao microcontrolador;
•
Retorna à leitura dos parâmetros do microcontrolador, se houver coincidência
dos dados retorna ao modo de operação.
3.5. Firmware
É a rotina executada pelo microcontrolador para efetuar a aquisição de dados, o
controle da capacidade da máquina e a comunicação com o PC que possui o sistema
supervisório.
3.5.1. Ambiente de Desenvolvimento do Firmware
Para desenvolvimento da programação do PIC 16F877A foi utilizado o software
PCW Compiler versão 3 da Monash University.
53
3.6. Fluxograma do Firmware
Inicio
Monitorar
comunicação
serial
S
N
Modo
Operação
?
Zerar saída
PWM
Fazer conversão dos sinais
analógicos
Realizar
linearização do
sinal de vazão
S
Pressão
Sucção
baixa ?
N
Retornar para o
modo de
operação
Modo
Automático ?
N
S
Executar
comando
manual
Receber e gravar
os parâmetros de
controle
S
Vazão
está
baixa ?
Parar
o
compressor
N
Enviar dados
para o
supervisório
Fig. 34 - Fluxograma do firmware do PIC16F877A
54
O fluxograma da Figura 34, mostra as principais funções executadas pelo firmware,
que são descritas em seguida:
•
Monitorar a comunicação serial, enviando e recebendo dados continuamente;
•
Se houver solicitação de configuração, o compressor é parado, os parâmetros
são atualizados e o sistema retorna para o modo de operação;
•
Se o modo é operação, o microcontrolador faz a conversão dos dados
analógicos para digitais, efetua a linearização do sinal de vazão da máquina. Em
seguida, verifica a pressão de sucção, se estiver baixa desliga a máquina e
envia os dados ao supervisório. Na seqüência, verifica se o sistema está em
automático (ativado). Se estiver, com base nos parâmetros de controle efetua o
controle da máquina, se não, efetua o comando manual e envia os dados ao
supervisório.
55
4.
PROJETO DO HARDWARE
O circuito do sistema anti-surge pode ser visto nos Anexos 7.1, 7.2, 7.3, 7.4.
4.1. Cálculo do circuito amplificador do sensor de pressão.
De acordo com a Tabela 2, supondo-se uma pressão de 25 kpa tem-se uma tensão
diferencial
na saída do detector piezo-resistivo de 30 mVcc para uma tensão de
alimentação de 3 Vcc.
4.1.1. Cálculo sub-circuito de alimentação do sensor de pressão
Utiliza-se um diodo zener ao invés da alimentação do próprio circuito para manter a
tensão no sensor estável mas isolada do restante do circuito. Caso haja um curto em um
dos sensores, mantendo o resto do circuito em funcionamento.
•
Tensão de zener = 5,1 Volt.
•
Potência do zener = 500 mW.
•
Corrente máxima do zener = 500mW / 5,1V = 98 mA.
De acordo com a mesma Tabela 2, a corrente típica de consumo do sensor é de 6
mAcc. Acrescentando-se 1 mAcc de folga para possíveis variações de componentes, temse:
R8 = (Valimentação-Vzener) / Iz = (9-5,1) / 7 = 557,14 Ω.
Utiliza-se o valor comercial mais próximo: 560Ω.
(8)
56
Para reduzir-se o valor da alimentação de tensão no detetor de 3,5Vdc, utiliza-se
um resistor que poderá ser ajustado caso haja diferenças nas características de
resistência interna do sensor utilizado, ela pode variar de cerca de 350 Ω a 550Ω conforme
a Tabela 2.
R= (Vzener- Valimentação) / Isensor = (5,1-3,5 ) / 7 = 228 Ω.
(9)
O resistor utilizado será o comercial mais próximo cujo valor é 220 Ω.
4.1.2. Cálculo e Desenvolvimento do Circuito Amplificador
O fabricante do sensor sugere em seu datasheet um circuito com dois
amplificadores operacionais para permitir que o ajuste seja obtido mais facilmente.
Entretanto, para facilitar ainda mais o ajuste, foi incluído um trimpot de ajuste de off-set do
amplificador operacional do segundo estágio de amplificação.
O PIC 16F877A, possui um conversor analógico/digital cuja entrada deve ser de 0 a
5Vcc. Para amplificarmos um sinal de 30 mVcc, portanto:
Ganho = Vo / Vi = 5 / 0,03 = 166.
(10)
Podemos dividir o circuito em um ganho de 10 e outro de 16 para obtermos uma
resposta mais linear e um melhor slew-rate.
Utilizamos então, um resistor de 1 kΩ na entrada do amplificador operacional e um
trimpot de 10 kΩ para obtermos um ganho de 10 vezes com valores de resistores e
potenciômetros comerciais, então se tem:
R6 = 1kΩ e R7 = 10kΩ.
Para mantermos as correntes balanceadas no amplificador operacional utiliza-se
um resistor R5 com o mesmo valor de R6.
57
Foi colocado no circuito um trimpot de ajuste de zero de 10 kΩ, de valor igual ao
valor de R9. R9 deve ser igual a R7. (BoletimAN1 100, Motorola)
No segundo estágio amplificador mantivemos o equilíbrio de cargas com dois
resistores de 1 kΩ na entrada do amplificador operacional. Utilizamos um trimpot de
100kΩ para obter um ganho de 16 vezes ou mais de acordo com os valores de escala
determinados para a medição de pressão, e um trimpot de ajuste de off-set de 50 kΩ,
conforme datasheet do amplificador operacional TL081 da National Semiconductor. O
circuito transdutor de pressão estão representado em um só diagrama esquemático da
Figura 49 do anexo 9.2.
Para as três medições são desenvolvidos três circuitos iguais, que são alimentados
por dois circuitos reguladores de tensão LM 7809 e LM7909, que tem capacidade de 1A,
que é suficiente para alimentar todo o sistema uma vez que o consumo total não excederá
200 mA. Serão utilizados dois capacitores de 1000 microFarad para eliminar oscilações
nas fontes de alimentação. O circuito da fonte está representado na diagrama
esquemático do anexo 9.1.
4.1.3. Desenvolvimento Circuito do Microcontrolador
O circuito do microcontrolador, visto no anexo 9.3, foi desenvolvido atendendo às
especificações do datasheet. ( PIC16F87X , Microchip)
A alimentação é proveniente de um LM 7805 que tem capacidade de corrente de
1 Acc. O consumo estimado do circuito é de no máximo 100 mAcc. A comunicação com a
porta serial do computador é feita através do circuito integrado MAX232 e sua
configuração também está definida em seu datasheet.
58
4.1.4. Cálculo e Desenvolvimento do Circuito do Modulador de Potência
O circuito modulador de potência, visto no anexo 9.4, que utilizará a saída PWM do
microcontrolador consiste de um foto-acoplador MOC 3011, e para limitar a corrente do led
interno foi utilizado um resistor de 1 kΩ. Para o controle de potência foi utilizado o TRIAC
TIC226D que possui capacidade para chavear até 8 A de corrente a uma tensão de 400 V.
O que torna o circuito bastante robusto.
4.1.5. Sinais de Interface
Tabela 4 - Sinais de Interface entre os Circuitos Eletrônicos
Anexo
Rótulo
Tipo de Sinal
Função
9.1, 9.2, 9.3
+9 Vcc
Alimentação
Alimentação dos circuitos
9.1, 9.2
-9 Vcc
Alimentação
Alimentação dos circuitos
9.2, 9.3
PD
Sinais analógicos
Dado analógico
9.2, 9.3
PS
Sinais analógicos
Dado analógico
9.2, 9.3
V
Sinais analógicos
Dado analógico
9.2, 9.3
TERRA
Comum de Sinal
Acoplamento de Sinal
9.3, 9.4
PWM
Sinal Digital
Sinal de Controle
59
4.1.6. Lista de Materiais
As listas de materiais utilizados neste projeto estão disponíveis nas tabelas do anexo 9.5.
ao anexo 9.7.
60
5.
PROJETO DO SOTFWARE
Nesta seção apresentam-se os diagramas de elaboração do software do sistema
supervisório, que será a interface IHM (Interface Homem Máquina) do sistema e o código
de programação do microcontrolador PIC 16F877A.
5.1. Diagramas de Caso de Uso
Sistema Anti-Surge
Iniciar
Operar Manual
Ativar Proteção
Operador
Microcontrolador
Ativar Comunicação
Ver Histórico
Finalizar
Configurar
Supervisor
Fig. 35 - Diagrama de Casos de Uso do Sistema Anti-Surge
61
Abaixo temos os casos de uso identificados do sistema.
Descrição dos casos de uso:
•
Caso de uso:
Iniciar.
•
Atores
Operador, Supervisor.
•
Propósito:
Monitorar as variáveis do compressor.
•
Descrição:
O operador inicia o sistema supervisório e pode verificar o
histórico do compressor, ativar a comunicação serial ou chamar
a tela de configuração para leitura dos parâmetros de
segurança ou alterar estes parâmetros.
•
Tipo:
Primário
•
Caso de uso:
Ativar Comunicação.
•
Atores:
Operador, Supervisor, Microcontrolador.
•
Propósito:
Ativar a comunicação com o controlador do compressor.
•
Descrição:
Estando o sistema supervisório funcionando inicia-se a comunicação do supervisório com o controlador do compressor,
as
variáveis são atualizadas e o mapa de surge é mostrado,
se
houver alguma inconsistência com os parâmetros gravados no
arquivo config.sur o compressor é parado e emite aviso na
tela.
•
Tipo:
Primário
62
•
Caso de uso:
Operar em Manual.
•
Atores:
Operador, Supervisor, Microcontrolador.
•
Propósito:
Ativar o controle manual do compressor.
•
Descrição:
Estando o sistema supervisório funcionando pode-se parar e
partir o compressor, mas a proteção anti-surge
não
estará
funcional, apenas a parada por baixa pressão na sucção estará
operacional no microcontrolador, o título sistema anti-surge fica
em cor preta.
•
Tipo:
Primário
•
Caso de uso:
Ativar Proteção.
•
Atores:
Operador, Supervisor, Microcontrolador.
•
Propósito:
Ativar o controle do compressor.
•
Descrição:
Estando o sistema supervisório funcionando inicia-se a ativação do sistema anti-surge do compressor, o título sistema antisurge fica em cor azul.
•
Tipo:
Primário
•
Caso de uso:
Ver Histórico.
•
Atores:
Operador, Supervisor.
•
Propósito:
Verificar os dados registrados.
•
Descrição:
Estando o sistema supervisório funcionando sistema pode-se
acessar os registros anteriores das variáveis
gravados no arquivo compreg.txt.
•
Tipo:
Secundário.
do
compressor
63
•
Caso de uso:
Finalizar.
•
Atores:
Operador, Supervisor.
•
Propósito:
Finalizar o supervisório.
•
Descrição:
Desligar o sistema supervisório, encerrando a comunicação
serial com o microcontrolador.
•
Tipo:
Primário
•
Caso de uso:
Configurar.
•
Atores:
Supervisor, Microcontrolador.
•
Propósito:
Alterar os parâmetros de controle do microcontrolador.
•
Descrição:
Solicitar senha de configuração, desligar o compressor, enviar
via comunicação serial os novos parâmetros de controle
do
microcontrolador (download) e confere os dados recebidos
(upload) .
•
Tipo:
Primário
64
5.2. Diagramas de Seqüência
Com base nos casos de uso definidos anteriormente, foram desenvolvidos os
diagramas de seqüência.
Na Figura 36, tem-se o diagrama de seqüência do caso de uso “Iniciar”. O operador
ou o supervisor, liga o sistema supervisório. Em seguida o supervisório verifica se está
havendo comunicação com o microprocessador e lê os parâmetros de controle do mesmo.
Se os parâmetros forem iguais aos gravados no sistema, coloca o compressor em
operação e monitora os dados de pressão e vazão.
Iniciar
Operador
Sistema Anti-surge
Iniciar()
Ativar comunicação()
Ler parâmetros do microcontrolador()
Monitorar compressor(variáveis)
Fig. 36 - Diagrama de seqüência do caso de uso “Iniciar”.
65
Na Figura 37, vê-se o diagrama de seqüência do caso de uso “Ativar Proteção”. O
operador ou o supervisor aciona o botão “Ativar Proteção”. Em seguida o supervisório
envia comando para o microcontrolador para ativar a proteção anti-surge. A partir de então
o sistema emitirá alarmes para indicar quando o compressor estiver em condição de
operação insegura.
Operar em Manual
Operador
Sistema Anti-surge
Parar Compressor(carga)
Partir Compressor(carga)
Fig. 37 - Diagrama de seqüência do caso de uso “Operar em Manual”.
Na Figura 38, vê-se o diagrama de seqüência do caso de uso “Ativar Proteção”. O
operador ou o supervisor aciona o botão “Ativar Proteção”. Em seguida o supervisório
envia comando para o microcontrolador para ativar a proteção anti-surge. A partir de então
o sistema emitirá alarmes para indicar quando o compressor estiver em condição de
operação insegura.
66
Ativar Proteção
Operador
Sistema Anti-surge
Ativar Proteção(status)
Fig. 38 - Diagrama de seqüência do caso de uso “Ativar Proteção”.
Na Figura 39, vê-se o diagrama de seqüência do caso de uso “Finalizar”. O
operador ou o supervisor aciona o botão “Finalizar”. Em seguida o sistema é finalizado e a
comunicação serial com o microcontrolador é encerrada.
Finalizar
Operador
Sistema Anti-surge
Sair()
Fig. 39 - Diagrama de seqüência do caso de uso “Finalizar”.
Na Figura 40, vê-se o diagrama de seqüência do caso de uso “Configurar”. O
supervisor aciona o botão “Configurar”. Em seguida o compressor é desligado e o sistema
recebe os novos parâmetros e envia ao microcontrolador.
67
Configurar
Supervisor
Sistema Anti-surge
Desligar compressor()
Download(char)
Upload()
Fig. 40 - Diagrama de seqüência do caso de uso “Exibir Gráfico”.
68
5.3. Diagrama de Classes
O diagrama de classes implementados para o projeto:
FormConfig
+*comp :
+*serial
cCompressor
cCompressor
cSerial
+Form2(Owner: TComponent*)
+Habilitar():
void
+Download():
void
+Upload():
void
+Retornar().:
void
cSerial
FormSurge
-DCB:
-HANDLE:
-char vetor[40];
-tam
dcb
hPorta
int
cmd
+cSerial(String, int,int, int, int):Handle
+Enviar(char):
void
+Limpar():
void
+Receber():
char *
+ ~cSerial():
FormHistorico
+Form3(Owner: TComponent*)
+Atualizar():
+Retornar().:
void
void
+*compressor:
+*serial:
-Re:
-Vi:
-Vimax:
-Vimi
-Pd:
-Pdmax:
-Ps:
-Psmin:
-Psmax:
-Pdr:
-In:
-Ca:
-St:
-Lim:
-Su:
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
AnsiString
cCompressor
cSerial
+FormSurge(Owner:TComponent*)
+OperarManual():
void
+AtivarComunicação():
void
+Histórico():
void
+AtivarProteçãoA.S(char).: void
+Sair():
void
+cCompressor();
+monitorar(char*): bool
+upload(char*):
bool
+get_Re():
AnsiString
+get_Vi():
AnsiString
+get_Vimax():
AnsiString
+get_Vimin():
AnsiString
+get_Pd():
AnsiString
+get_Pdmax():
AnsiString
+get_Ps():
AnsiString
+get_Psmin():
AnsiString
+get_Psmax():
AnsiString
+get_In():
AnsiString
+get_Pdr():
AnsiString
+get_Ca():
AnsiString
+get_Sd():
AnsiString
+get_St():
AnsiString
+get_Lim():
AnsiString
+get_Su():
AnsiString
+confvar():
void
+gravar(AnsiString): void
+configurar(8 AnsiString): void
69
5.4. Código do Software Supervisório
Foi desenvolvido em linguagem C++, com a ferramenta Builder6 da Borland. Foram
desenvolvidas duas classes uma para a comunicação serial denominada cserial e outra
para efetuar a monitoração do compressor, denominada compressor. Para a interface
gráfica foram desenvolvidos três “Forms” um para o supervisório, outro para interface
direta com o microcontrolador por onde são feitas as alterações dos parâmetros de
segurança do compressor no microcontrolador e o último para verificar o histórico dos
dados.
5.5. Código do Firmware do microcontrolador PIC 16F877A
O código de programação do microcontrolador, foi desenvolvido em linguagem C,
com o auxílio da ferramenta PCW Compiler versão 3 da Monash University.
Para agilizar a fase de testes na programação do microcontrolador foi instalado no
mesmo o programa BOOTLOADER que depois de instalado permite que o código seja
alterado com o dispositivo instalado no circuito, evitando que este seja manuseado
excessivamente o que pode levar a maus-contatos e fragilização dos seus terminais.
O código que está implementado no projeto em termos gerais monitora a
comunicação serial em 19.200 bps, converte os sinais analógicos, executa a extração de
raiz quadrada do sinal de vazão, Recebe os parâmetros de segurança da máquina e os
memoriza em sua memória EEPROM, de modo a mantê-los mesmo que o circuito seja
desenergizado. Em seguida, monitora o comando manual executando os comandos
recebidos ou executa o comando auto e supervisiona a operação do compressor. e em
caso de pressão baixa na sucção desliga a máquina independentemente do estado ser
manual ou auto. Quando em auto, se a vazão cair por duas vezes abaixo do limite mínimo
efetua a parada do compressor. Por fim, envia os dados para informação e registro no
supervisório.
É importante notar que o sistema foi desenvolvido para funcionar perfeitamente
mesmo com o supervisório desligado, obviamente sem enviar as informações, mas
assegurando a integridade da máquina.
70
6.
RESULTADOS
Graças à obtenção de uma máquina de pequeno porte, pode-se efetuar os testes
com todo o sistema interligado. Os dados obtidos mostraram que o sistema responde de
acordo com o esperado como pode ser observado a seguir.
6.1. Testes com o Hardware dos Sensores de Pressão
O circuito foi desenvolvido com o apoio da ferramenta PROTEUS e montado em
uma placa universal tamanho 10x10cm, como pode ser visto na Figura 41. Na mesma
placa foram incluídas as fontes de +9VCC e -9 VCC, foram montados três circuitos
eletrônicos idênticos e neles foram conectados os sensores de pressão.
TP+9
TP-9
RV2
RV1
TP1
TP2
RV3
TERRA
Fig. 41 - Placa dos Circuitos Fonte e Sensores de Pressão.
71
Os sensores foram calibrados utilizando-se como padrão o esfigmomanômetro
modelo TYCOS com faixa de 0 a 300 mmHg.
O circuito para medição da pressão de descarga foi calibrado de 0 a 200 mmHg.
O circuito para medição da pressão de sucção foi calibrado de -50 a +50 mmHg,
como não temos padrão de pressão negativa a calibração na faixa negativa foi feita
pressurizando a entrada de menor pressão do sensor de pressão(Port 2).
O circuito para medição de vazão foi calibrado de 0 a 50 mmHg.
Os testes realizados demonstraram alta linearidade dos sensores.
Na tabela 5, podemos ver as relações entre a tensão na saída do circuito
amplificador e o valor de pressão aplicado ao sensor.
As tensões das fontes ficaram estáveis em -9 Vcc, conforme medido em TP-9, e
+9 Vcc, conforme medido em TP+9, sem aquecimento de componentes, mesmo
permanecendo ligadas por 36 horas seguidas.
O ponto de teste TP1 mostrou que o ajuste de zero através de RV2 se mostrou
eficaz. Da mesma forma em TP2 a tensão de saída do circuito pode ser monitorada e
ajustada através do potenciômetro RV1.
Tabela 5 - Sinais de Calibração dos Circuitos Eletrônicos
Sensor 1
Pressão
Tensão
(mmHg)
(V)
0
0
50
Sensor 2
Indicação
Pressão
Sensor 3
Tensão Indicação Pressão Tensão Indicação
(mmHg)
(V)
(mmHg)
(mmHg)
(V)
(Nm3/h)
0
-50
0
-50
0
0
0
1,26
50
-25
1,25
-24
12,5
1,24
50
100
2,50
101
0
2,52
1
25
2,49
70
150
3,74
150
25
3,76
25
37,5
3,74
87
200
5,00
200
50
5,00
50
50
5,00
100
(mmHg)
A indicação de vazão, que tem seu sinal variando quadraticamente em relação ao
diferencial de pressão no sensor foi observada no supervisório. A conclusão é que a
72
linearização ocorreu corretamente. Ou seja, a variação de vazão é razão quadrática do
diferencial de pressão no sensor de pressão.
Como se pode ver, os valores são bem lineares, foi observado um pequeno desvio
em relação à temperatura ambiente na energização do circuito. Entretanto, após 30
minutos de energização do circuito, este efeito em alta escala desaparece, entretanto em
um próximo desenvolvimento seria interessante prever uma compensação de temperatura
ou fazer a aquisição de componentes que já tenham esta característica de forma
intrínseca.
6.2. Testes com o Hardware do Microcontrolador
O circuito do microcontrolador foi desenvolvido em uma placa de 10x10 cm à parte
dos sensores de pressão, como se vê na Figura 42.
TP2
TP1
PD
PS
V
SAÍDAPWM
TERRA
Fig. 42 - Placa do Circuito do Microcontrolador.
73
Para se obter maior velocidade na reprogramação do circuito durante a fase de
testes foi instalado o programa BOOTLOADER que permite a reprogramação do circuito
sem que para isto haja um hardware especial e nem seja necessário a remoção do
microcontrolador do circuito.
Nesta placa foram instalados dois potenciômetros para se poder efetuar testes de
calibração do conversor A/D do microcontrolador. A resposta obtida foi linear com variação
de no máximo uma unidade de contagem numa faixa de 0 a 255. Entretanto, com os
circuitos detectores acoplados ao microcontrolador foi necessário a implementação de um
método de média de 20 medições para fornecer o valor mais correto. Isto provavelmente
se deve à derivação do amplificador operacional, já que o microcontrolador faz
amostragens a cada 30 µs. Para se obter maior precisão foram utilizadas, na programação
do PIC, variáveis do tipo long int de forma a evitar perdas devido a overflow
nas
operações matemáticas.
Durante os testes a tensão de alimentação do circuito medida em TP2 em relação
ao TERRA do circuito permaneceu estável em 5 Vcc sem aquecimento dos componentes.
Os leds de monitoração da comunicação serial foram acionados corretamente
conforme previsto, sendo o amarelo para indicar a transmissão de sinais e o vermelho
para indicar a recepção dos mesmos.
Após o ajuste do sistema, as mensagens do microcontrolador, via circuito integrado
MAX232, para o computador eram transmitidas a razão de 10 mensagens a cada 8
segundos. Como as mensagens eram mandadas a cada 20 execuções da rotina,
podemos concluir que o sistema estava executando todo o programa a cada 40
milissegundos o que nos dá com uma margem de segurança de 20% uma vez que o
limite máximo estabelecido para estes sistemas é da ordem de 50 milissegundos.
Durante os testes foi também observado, que quando da ocorrência de qualquer
anormalidade na qual o sistema deva parar a máquina, o fato ocorreu imediatamente, sem
demora, nem travamentos.
74
6.3. Testes com o Hardware do Acionador do Motor
O acionador foi testado, utilizando-se um motor com corrente de 9 A, ou seja,
12,5% acima da corrente nominal. O tiristor funcionou corretamente, suportando diversas
partidas onde a corrente atinge picos maiores sem qualquer problema, o que é uma
constatação dos dados pesquisados. Na Figura 43, podemos ver o compressor usado
para o teste do sistema.
Tomada de baixa
pressão para medição
da Vazão
Restrição para a
medição da
Vazão
Tomada de alta
pressão para medição
da Vazão
Tomada de
Pressão de
Descarga
Tomada de
Pressão de
Sucção
Fig. 43 - Compressor utilizado para teste do Sistema Anti-Surge.
6.4. Testes com o Supervisório
A comunicação serial funciona corretamente sem travamentos, isto foi observado
no teste realizado com todo o sistema funcionando por cerca de 8 horas, em que várias
75
condições foram simuladas, como: partida e parada do compressor e simulações de
variáveis ultrapassando os limites de controle.
Os dados são armazenados no arquivo de registro e são resgatáveis a qualquer
momento como pode ser observado na tela de Registros de Eventos do Compressor de Ar
e no arquivo compreg.txt.
A reprogramação dos parâmetros do microcontrolador ocorre normalmente como
previsto através da função download e a função upload permite confirmar os dados que
estão programados no microcontrolador.
Os comandos manuais oriundos do supervisórios são efetuados normalmente para
parar e iniciar a operação do compressor.
Foi realizado o teste de parada por baixa pressão na sucção: a sucção da máquina
foi propositalmente obstruída a pressão de sucção caiu e a máquina parou imediatamente
quando foi atingido o valor de -25 mmHg conforme programado no firmware.
Durante o teste do compressor em condição normal de operação, a tela
apresentada é como a mostrada na Figura 44.
Fig. 44 - Tela do Supervisório quando a máquina está em operação normal.
76
São mostrados os valores de Vazão Instantânea, Pressão de Sucção e Pressão de
Descarga. O status da controle é indicado dizendo se o sistema está em Manual ou Auto
(ativado) e a Carga que quando é igual a 0% indica compressor parado e 100% indica
compressor operando. Com o sistema em Manual a inscrição no canto superior esquerdo
Sistema Anti-Surge fica em cor Preta, caso estivesse em auto (ativado) a cor seria azul. O
“banner”de alarme em cor verde e os dizeres indicam que a operação é normal. O ponto
de operação no gráfico indica a situação de operação normal quando a cor é branca
aquém das linhas de vazão mínima (vermelha) e de controle (azul).
Em outra situação com a operação do equipamento em estado de alerta a tela
apresentada é como mostrado na Figura 45 .
Fig. 45 - Tela do Supervisório quando a máquina está em alerta.
77
São mostrados as mesmas variáveis mencionadas nos parágrafos anteriores. O
“banner”de alarme em amarelo e os dizeres indicam que a operação do compressor está
ocorrendo em estado de alerta. O ponto de operação no gráfico indica a situação de
operação anormal quando a cor é amarela porque está a uma distância máxima de 5%
das linhas de vazão mínima(vermelha) e ou de controle(azul). Se o sistema estiver em
auto, continuaria a operação da máquina,entretanto é gravado um registro de alarme no
histórico.
Em outra situação com a operação do equipamento em estado de emergência a
tela apresentada é como a mostrada na Figura 46 .
As variáveis também são as mesmos. Porém, o “banner” fica vermelho e os dizeres
indicam que o compressor está trabalhando na área de surge. Neste caso se o sistema
estiver ativado (auto) o compressor seria parado automaticamente. Esta condição foi
constatada quando o sistema estava em auto ou seja, com a proteção anti-surge ativada.
Fig. 46 - Tela do Supervisório quando a máquina está em operação na área de surge.
78
A tela de registros “Histórico” como visto na Figura 47, é de grande auxílio na
análise das condições operacionais da máquina em tempos anteriores e em caso de
falhas.
Com base nestes registros também seria possível construir uma tela de tendência
utilizando os gráficos do “Excel”, mas isto também poderia vir a ser implementado neste
próprio supervisório, não o foi porque o tempo foi demasiado curto.
Fig. 47 - Tela do Supervisório para a consulta ao “Histórico”.
79
7.
CONCLUSÃO
Após os testes realizados foram levantados os aspectos positivos e negativos na
elaboração do projeto.
7.1. Aspectos Negativos
O help do Builder 6 da Borland é muito ineficiente em alguns casos, como por
exemplo: o manuseio do ListBox.
O tempo foi demasiado curto, o projeto deveria ter sido definido no ano anterior
para se poder efetuar a pesquisa e o desenvolvimento com mais acertividade.
Alguns componentes definidos inicialmente não foram encontrados no mercado
como por exemplo amplificadores operacionais de instrumentação, obrigando a utilização
de amplificadores operacionais comuns devido à sua falta no almoxarifado do Unicenp por
já estarem os disponíveis todos em uso, a implementação deste projeto com os mesmos
certamente daria a ele mais estabilidade.
7.2. Aspectos Positivos
A grande surpresa ocorreu, quando o sistema foi todo interligado, no mês de
setembro, quando eu esperava encontrar mais dificuldades, entretanto o funcionamento foi
exatamente de acordo com o projetado.
O projeto teve o desempenho esperado, os resultados obtidos calibração do
sistema e tempo de resposta inferior a 50 milissegundos conforme demonstrado na seção
80
6 desta monografia atestaram sua eficiência. Inclusive por se tratar de segurança de
equipamentos e pessoas, item cada vez mais exigido atualmente.
O desenvolvimento desde os transdutores até o supervisório proporcionaram uma
oportunidade de se aplicar as técnicas aprendidas no curso de Engenharia da
Computação:
eletrônica,
teleinformática,
cálculo,
física,
sistemas
digitais,
microprocessadores, instrumentação eletrônica, engenharia de software, entre outras. A
aplicação destes conhecimentos no projeto consolida o aprendizado e nos impele a buscar
novos conhecimentos.
A excelente linearidade e repetibilidade obtida dos sensores foram determinantes
para o sucesso do projeto.
O desafio da montagem com componentes de fácil aquisição no mercado foi
plenamente realizado, tendo-se em conta que equipamentos especialmente desenvolvidos
para este fim sempre envolvem altas quantias.
A inclusão de uma ferramenta de configuração do microcontrolador com o mesmo
instalado no circuito através do software supervisório foi uma meta inicial atingida com
êxito.
7.3. Desenvolvimentos Futuros
A versatilidade dos sensores de pressão permite criar aplicações para indústria e o
lar. Aplicações como medidores de nível de caixa d’água, sensores de temperatura de
aquecedores de água, mini-estação climática, condicionador de ambientes, calibradores
de pressão, monitoramento de nível em tonéis e medição de vazão entre outros são
possíveis.
81
A capacidade do microcontrolador pode ser melhor explorada porque existem
muitos pontos de entrada e saída disponíveis que não foram utilizados no projeto,
permitindo com isto que sejam monitorados outros dados da máquina. Por exemplo:
chaves de temperatura, chaves de nível, ou outros tipos de dados analógicos como por
exemplo a corrente consumida pelo motor.
Os dados gravados no arquivo de registro de eventos poderiam ser gravados em
um arquivo tipo “txt” público e enviados a um sistema corporativo para avaliação do
rendimento da máquina e dos custos de operação da máquina.
A falta de pesquisa, antes do início do projeto, dos componentes de baixo custo
disponíveis no mercado local, tornou-me mais precavido para o desenvolvimento de
futuros projetos. Porém, a experiência adquirida certamente será um balizador para outras
tarefas desta natureza com que certamente me depararei.
82
8.
REFERÊNCIAS BIBLIOGRÁFICAS
HALLIDAY D. Fundamentos de Física 1, Rio de Janeiro: LTC, 2002.
MANNESMANN-DEMAG. Instrumentation&Application Manual Compressor.(s.d.)
DRESSER. D.86.12.1.4- Manual de Manutenção de Compressores, (s.d.)
SMAR. Catálogo Eletrônico, Device Library, versão 1.05, 2006.
FISHER. Catálogo Eletrônico, 2001.
YOKOGAWA. Catálog Eletrônico.
PEREIRA F. Microcontroladores PIC, São Paulo:ÉRICA, 2002.
PIC16F87XData Sheet, Microchip, 1997.
GUTIERRES Prof.A. documento capturado na Internet em 29/03/2006.
UNICENP. Informática Industrial, 2005.
TEXAS INSTRUMENTS.Signal Conditioning Wheatstone Resistive Bridge Sensors.
09/1999.
MOTOROLA. AN1 100 - Motorola Analog to Digital Convert Resolution Extension
Using a Motorola Pressure Sensor , s.d..
NATIONAL SEMICONDUCTOR. LF351 Wide Bandwidth JFET Input Operational
Amplifier, 09/1995.
87
9.5. Listas de Materiais do Circuito do Modulador de Potência.
Tabela 6 - Relação de Material da Placa do Circuito do Modulador de Potência.
Valor
Referência
Comercial
Identificação
-
R1
Item
Quantidade
Descrição
1
1
Resistor
2
1
Resistor
3
1
Triac
400 V / 8 A
TIC -226D
U1
4
1
Opto acoplador
220V
MOC 3011
-
5
1
Soquete C. I.
-
-
-
1kΩ /
1/8 Watt
10kΩ /
R2
1/8 Watt
88
9.6. Listas de Materiais do Circuito do Microcontrolador.
Tabela 7 - Relação de Material da Placa do Circuito do Microcontrolador
Item
Quantidade
Descrição
Valor
Referência
Comercial
Componente
1
1
Conector Fêmea
-
DB9
J1
2
1
Microcontrolador
-
PIC 16F877A
U1
3
1
Circuito Integrado
-
MAX 232
U2
4
1
Circuito Integrado
-
LM 7805
U3
5
2
Resistor
-
R1 - R2
6
1
Resistor
-
R3
7
2
Resistor
-
R4 - R6
8
1
Resistor
-
R5
9
1
Potenciômetro
Trimpot
RV1
10
1
Potenciômetro
Trimpot
RV2
11
1
Cristal Oscilador
4 MHz
-
X1
12
1
Led
-
Led Amarelo
D1
13
1
Led
-
Led Verde
D2
14
1
Led
-
Led Vermelho
D3
15
1
Mini-Botoeira
-
Push Button
RESET CPU
16
5
Capacitor
Eletrolítico
10µF / 25 V
-
C1- C2 - C3 C4 - C5
100 Ω /
1/8 Watt
10 kΩ /
1/8 Watt
1 kΩ /
1/8 Watt
560 Ω /
1/8 Watt
20 kΩ /
1/8 Watt
100 kΩ /
1/8 Watt
89
9.7. Listas de Materiais do Circuito dos Transdutores de Pressão.
Tabela 8 - Relação de Materiais do Circuito dos Transdutores de Pressão.
Item
Quantidade
Descrição
Valor
Referência
Comercial
Componente
Seção dos Transdutores de Pressão (3 circuitos idênticos)
1
3
Sensor de
Pressão
2
12
Resistor
3
6
Resistor
4
3
Resistor
5
3
Resistor
6
3
7
6
8
3
Diodo Zener
9
3
Potenciômetro
10
3
Potenciômetro
11
3
Potenciômetro
Capacitor
Poliéster
Amplificador
Operacional
-
MPX53DP
R1/R2/R3/R4
-
R5 - R6 R10 - R11
-
R7 - R9
-
R8
-
R13
68 pF / 100V
-
C1
-
TL081
U1 - U2
1 kΩ /
1/8 Watt
10 kΩ /
1/8 Watt
560 Ω /
1/8 Watt
220 Ω /
1/8 Watt
5,1 V /
500 mWatt
100 kΩ /
1/8 Watt
10 kΩ /
1/8 Watt
50 kΩ /
1/8 Watt
Trimpot
RV1
Trimpot
RV2
Trimpot
RV3
Seção Fonte de Alimentação do Circuito Eletrônico
12
2
Resistor
1 kΩ /
1/8 Watt
-
R1 -R2
13
1
Led
-
Led Amarelo
D1
14
1
Led
-
Led Vermelho
D2
15
1
9V
LM 7809
U1
16
1
-9 V
LM 7909
U1
17
1
1000µF / 25 V
-
C1 - C2
18
1
100µF / 25 V
-
C3 - C4
Regulador de
Tensão
Regulador de
Tensão
Capacitor
Eletrolítico
Capacitor
Eletrolítico
90
10. GLOSSÁRIO
•
SURGE -
Fenômeno de reversão instantânea de fluxo que ocorre dentro
de um compressor centrífugo devido à baixa vazão e pressão
de descarga muito elevada.
•
TIRISTOR
O tiristor é uma chave eletrônica de potência integrada de três
terminais que pode ser um SCR ou um TRIAC.
•
SUPERVISÓRIO
Software destinado a monitorar um ou mais equipamentos de
uma indústria através dos sinais eletrônicos enviados por eles.
•
LOG
Registro de atividades gerado por programas de computador.
•
TRIAC
Dispositivo semicondutor chaveador para corrente alternada.
•
Banner
faixa onde são escritos os estados de alarme e sua função.
•
Datasheet
folha de dados onde estão as especificações e características
dos componentes eletrônicos.
•
Strain-gage
transdutor que altera sua resistência ôhmica quando uma força
a ele aplicada produz uma deformação em sua estrutura física.