Relatividade
Vetores, Escalares e Tensores
Relatividade » Vetores, Escalares e Tensores
1
Grandezas Vetoriais e Grandezas Escalares
A física lida com uma gama muito grande de grandezas físicas. Na mecânica lidamos, por exemplo,
com grandezas vetoriais e escalares. Nessa seção, explicaremos o que são essas grandezas, sem
defini-las como “aquelas que têm uma direção um módulo e um sentido”: essa definição é de um
curso do segundo grau. Grandezas vetoriais são, na verdade, melhor definidas considerando-se
a questão da rotação de dois sistemas de referência. Isso porque, como veremos no próximo
capítulo, o uso de vetores permite que se mantenha a forma das leis físicas quando escritas em um
e outro sistemas de referências. Além disso, essa definição permite determinar novas grandezas
físicas definidas como produtos de vetores.
É importante classificar grandezas físicas em categorias, ou tipos. A forma utilizada para efetuar
essa classificação tem a ver com as propriedades dessas grandezas (ou de suas componentes) sob
rotações. É exatamente aqui que surge o conceito de grandezas vetoriais e grandezas escalares.
Assim, uma definição mais precisa e, ao mesmo tempo, uma generalização de vetores (como
grandezas tensoriais) faz uso das propriedades de transformação de grandezas físicas quando
efetuamos rotações.
Lidamos na física com grandezas designadas genericamente como tensores. Os tensores se
distinguem uns dos outros por seus postos. A um tensor de posto zero, designamos usualmente
como grandeza escalar. Um tensor de posto 1, denominamos vetor. Momentos de inércia, por
exemplo, são componentes de tensores de posto 2.
Grandezas Escalares
Definimos uma grandeza física como escalar se, ao efetuarmos uma rotação no sistema de
coordenadas, essa grandeza não sofrer qualquer alteração.
Ou seja, uma grandeza escalar é invariante por rotações. Assim, se T for uma tal grandeza física,
encontraremos que, quando medida em um referencial ou em outro sistema de referência, ela terá
como resultado o mesmo valor. Para tal grandeza, escrevemos:
T(x, y, z) = T(x′, y′, z′)
( 1 )
Figura 1: Grandezas escalares.
Relatividade » Vetores, Escalares e Tensores
2
A temperatura é um exemplo de grandeza física escalar. O tempo é outra grandeza escalar, pois
não importa a orientação do sistema de coordenadas, o intervalo de tempo medido quando estamos
em um sistema ou no outro é o mesmo. A distância entre dois pontos é uma grandeza invariante
sob rotações. Ou seja, se considerarmos a distância de um ponto até a origem, escrevemos:
x2 + y2 + z2 = x′2 + y′2 + z′2
( 2 )
Utilizando a notação introduzida no último capítulo, escrevemos:
r r = r′ r′
( 3 )
Adiante, ainda nesse capítulo, ampliaremos o conjunto de grandezas escalares.
Grandezas Vetoriais
Grandezas vetoriais são grandezas que requerem três atributos para serem inteiramente
caracterizadas ou especificadas: módulo, direção e sentido.
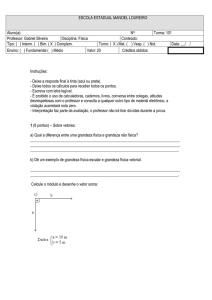
Figura 2: Campo de velocidades e o campo gravitacional da Terra.
Uma definição mais geral parte do conceito de componentes. Ou seja, uma grandeza vetorial
é especificada a partir da atribuição do valor de cada uma das três componentes de um vetor.
Relatividade » Vetores, Escalares e Tensores
3
Fazendo uso de um sistema cartesiano (em relação ao qual podemos agora especificar direções e
sentidos), uma grandeza vetorial é especificada através das componentes
(Vx , Vy , Vz )
( 4 )
Na notação simplificada que faremos, utilizamos a notação
(V1, V2, V3)
( 5 )
No entanto, o fato de agruparmos grandezas em trincas não as transforma em grandezas
vetoriais. Definimos um vetor como sendo um ente físico definido por três quantidades v1, v2, v3
(denominadas componentes da grandeza vetorial), de tal forma que, sob uma rotação, as componentes do vetor se transformam, de maneira análoga às coordenadas. Isto é,
V ′⟩ = R v⟩
( 6 )
em que
V ′1
V ′⟩ = V ′2
V ′3
V 1
V ⟩ = V 2
V 3
( 7 )
ou seja, cada coordenada do vetor se transforma, sob uma rotação, como
V ′i = ∑ RijV j
( 8 )
Portanto, uma grandeza vetorial é um conjunto de três grandezas componentes que se
transformam de uma maneira bem definida sob uma rotação.
Relatividade » Vetores, Escalares e Tensores
4
Podemos agora verificar que, de fato, a velocidade de uma partícula e sua aceleração são
grandezas vetoriais. Das definições, segue que a velocidade média e aceleração média, por
exemplo, têm componentes dadas por:
∆x
∆t
∆y
vy ≡
∆t
∆z
vz ≡
∆t
∆vx
∆t
∆v
ay ≡ y
∆t
∆v
az ≡ z
∆t
vx ≡
ax ≡
( 9 )
Assim, como o tempo é um invariante, a velocidade se transforma exatamente como as coordenadas. Trata-se, portanto, de uma grandeza vetorial. Sendo a velocidade um vetor, e como o tempo
é invariante, a aceleração também é uma grandeza vetorial. Em geral, podemos construir vetores a
partir de outros, por meio da multiplicação ou divisão por grandezas escalares.
Grandezas Tensoriais
Grandezas tensoriais são generalizações de grandezas escalares. Para entendermos isso,
consideremos o produto de componentes de um vetor. Analisaremos o caso do produto de duas
componentes. Seja o produto Tij de duas componentes de um vetor:
Tij = Vi Vj
( 10 )
Tais produtos geram uma nova grandeza física. Uma tal grandeza pode ser relevante ou útil, o
que acontece em muitos casos. Essa nova grandeza tem agora nove componentes e propriedades
bem definidas de transformação sob uma rotação. Isto é, a grandeza acima se transforma:
T → T ′
( 11 )
De tal forma que as componentes dessa grandeza se transformam, sob uma rotação, de
acordo com:
3
3
Tij′ = ∑ ∑ Rik R jlTkl′
k =1 l =1
( 12 )
Relatividade » Vetores, Escalares e Tensores
5
É muito comum uma notação convencionando que, quando dois índices são iguais, fica implícita
a soma. Nessa notação, escrevemos apenas:
Tij′ = Rik R jlTkl′
( 13 )
Uma grandeza física que tenha nove componentes e que se transforma como (000) é definida
como um tensor de posto 2.
Tendo em vista a propriedade da matriz de rotação ser uma matriz tal que sua transposta é igual
à sua matriz inversa, podemos escrever a transformação (000) anterior sob a forma:
T′ = RTR−1
( 14 )
Transformações como essa são denominadas transformações de semelhança.
Mais geralmente, definimos um tensor de posto S como uma grandeza física que possui 3S de
componentes, de tal forma que essas componentes se transformam:
Tij′...m = Rik R jl ⋅⋅⋅ RmnTkl′ ...n
( 15 )
Objetos que se transformam como a matriz R−1 também são vetores. Para diferenciá-los do
outro tipo de vetores, introduzimos índices em cima. Nessa definição:
T ′ij ...m = R −1ik R −1 jl ⋅⋅⋅ R −1mnTkl′ ...n
( 16 )
Assim, as componentes de um vetor se transformam sob uma rotação inversa (a qual também
é uma rotação), como:
V ′i = R −1ijV j
( 17 )
De modo geral, o tensor é caracterizado por um posto, que é um número inteiro positivo ou
zero. Um tensor de posto zero é uma grandeza escalar. Um tensor de posto 1 é um vetor.
Um exemplo curioso de tensor de posto 3 é o tensor de Levi-Civita, definido da seguinte forma:
1
ε ijk =
0
se i = 1, j = 2, k = 3
se dois ou tres indices forem iguais
( 18 )
Figura 3: A métrica do espaço e as tensões são
grandezas tensoriais.
Relatividade » Vetores, Escalares e Tensores
6
Além disso, esse tensor é totalmente antissimétrico:
ε ijk = −ε ikj
( 19 )
Pode-se verificar que este ente, assim definido, é um tensor, pois se transforma :
ε′ijk = Ril −1R jm −1Rkn −1εlmn
( 20 )
Produtos de componentes de Vetores
Vimos na seção precedente que, a partir do produto de componentes de um vetor, podemos
gerar novas grandezas físicas. Em particular, a partir de grandezas vetoriais, podemos construir
tensores de posto arbitrário.
Consideremos três produtos de componentes de vetores. Já se sabe que o produto
Fij = Ai Bj
( 21 )
Define uma nova grandeza física, com um caráter de tensor. Agora consideremos outro produto
S ≡ Ai Bi
( 22 )
Lembrando nossa convenção sobre índices iguais representarem uma soma, essa expressão, na
verdade, significa:
3
S ≡ ∑ A i Bi
( 23 )
i =1
Na notação do capítulo anterior, a grandeza S se escreve como
S≡
A B
( 24 )
Relatividade » Vetores, Escalares e Tensores
7
Portanto, como em uma rotação preservamos ângulos, a grandeza S é uma grandeza escalar,
isto é, invariante por rotações. Isso acontece porque
S ′ ≡ Ai′ Bi′ = Ak Rik −1R ji B j = Ai Bi ≡ S
( 25 )
Em que demonstra-se que a grandeza S definida através de (000) é, de fato, uma grandeza escalar.
O produto de componentes de um vetor
3
∑AB
i
i=1
i
≡ A B
( 26 )
Resulta ser uma grandeza física escalar. Por isso, damos o nome de produto
escalar de dois vetores.
Consideremos outro tipo de produto de componentes de dois vetores; seja a grandeza física
definida pela combinação de produtos
Por exemplo, a distância entre dois pontos, definida a partir do produto escalar de dois vetores, é uma
grandeza física invariante sob rotações. Logo, a distância entre dois pontos é uma grandeza escalar.
O produto de componentes de dois vetores
Tij = Ai Bj
( 27 )
transforma-se como um tensor de posto 2.
Consideremos agora outro tipo de produto de componentes de uma grandeza vetorial.
Definimos um conjunto de três grandezas físicas tomando o seguinte produto:
C i ≡ ε ijk Aj Bk
( 28 )
Em que está implícita a soma nos índices j e k e o símbolo εijk é um tensor de Levi-Civita.
De (000), concluímos que o objeto definido em (000) é um vetor, pois de (000) e (000), temos que:
C ′i ≡ ε′ ijk A′j Bk′ = Ril −1R jm −1Rkn −1R ja Rkbεlmn Aj Bk = Ril −1ε ljk Aj Bk
( 29 )
Relatividade » Vetores, Escalares e Tensores
8
A conclusão é que podemos definir uma nova grandeza vetorial a partir do
produto de componentes de vetores. As componentes são definidas como:
C1 = A2 B3 − B3 A2
C2 = A3 B1 − B1 A3
( 30 )
C3 = A1B2 − B2 A1
Damos o nome de produto vetorial de dois vetores ao vetor que resulta dos
produtos de componentes, de acordo com a regra apresentada.
O produto vetorial de dois vetores é um pseudovetor. Por tal afirmação, entendemos que um
vetor é tal que, sob reflexão espacial, suas componentes se transformam:
Vi → −Vi
( 31 )
Em uma notação mais simples, declaramos que um tensor de 3N componentes se transforma, como:
T → T ′ = ( R ⊗ R ⊗ .... ⊗ R ) T
( 32 )
O Grupo das Rotações
O conjunto de matrizes 3 × 3 associadas às rotações têm uma estrutura de grupo. Trata-se do
grupo das rotações, denominado SO(3), que constitui um conjunto de matrizes ortogonais cujo
determinante é igual a 1.
A estrutura de grupo decorre do fato de que o produto de duas rotações define uma nova
rotação, sendo, portanto, um outro elemento do grupo (propriedade do fechamento). Além disso,
valem as seguintes propriedades:
1. Propriedade associativa:
Se R1, R2 e R3 são rotações, então vale a propriedade associativa:
(R1 R2)R3 = R1(R2 R3)
( 33 )
Relatividade » Vetores, Escalares e Tensores
9
2. Existência do elemento identidade
O elemento identidade desse grupo é a matriz identidade:
1 0 0
1 = 0 1 0
0 0 1
( 34 )
3. Existência do elemento inverso
Grupos podem ser discretos ou contínuos. No último caso, cada elemento é caracterizado por
um conjunto de parâmetros.
Como já visto anteriormente, o elemento inverso da matriz de rotação é a sua matriz transposta:
( 35 )
Rt = R−1
O conjunto de todas as matrizes 3 × 3 ortogonais constitui o grupo conhecido como grupo 0(3).
Uma matriz ortogonal é tal que seu determinante se restringe a apenas dois valores:
R t R = 1 → ( det R ) = 1
2
( 36 )
O subgrupo para o qual o detR = 1 é o grupo SO(3). O símbolo S, nesse caso, quer dizer especial
(do inglês special).
O grupo das rotações é, portanto, o grupo das matrizes (3 × 3) ortogonais com determinante
igual a + 1.
O grupo SO(3) é um grupo de três parâmetros (os ângulos de Euler).
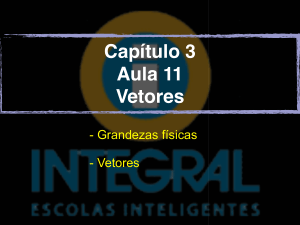
Figura 4: Rotações não
comutam, isto é, dependem
da ordem em que são
implementadas.
Relatividade » Vetores, Escalares e Tensores
10
Grupo de Translações
O grupo de translações é um grupo de três parâmetros, de tal forma que
T (a ) r = r + a
( 37 )
T ( a1 ) T ( a2 ) T ( a3 ) r = T ( a1 ) T ( a2 ) ( r + a3 ) = T ( a1 ) ( r + a2 + a3 )
= ( r + a1 + a2 + a3 ) = T ( a1 ) T ( a2 ) T ( a3 ) r
( 38 )
satisfaz à propriedade associativa
Tem o elemento identidade
T 0 r =r
()
( 39 )
É o elemento inverso de cada translação
T ( −a ) r = r − a
T ( a ) T ( −a ) r = r
Figura 5: Transladando pontos, podemos transladar objetos.
( 40 )
Relatividade » Vetores, Escalares e Tensores
11
Representações Irredutíveis:
o Produto Vetorial de dois Vetores
Um produto de N matrizes da forma:
R ⊗ R ⊗ .... ⊗ R
( 41 )
constitui uma representação do grupo SO(3) de dimensão 3N. Para N > 1, essas representações
são redutíveis. É possível decompor uma representação redutível em uma soma direta de representações irredutíveis de dimensão menor do que 3N. Isto é, podemos escrever formalmente:
R ⊗ R ⊗ .... ⊗ R = R1 ⊕ R2 ⊕ .... ⊕ Rn
( 42 )
O produto direto de duas matrizes pode ser decomposto em duas representações irredutíveis
de dimensões 6 e 3. Formalmente, escrevemos:
R ⊗ R = R6 ⊕ R3
( 43 )
Um exemplo de representação irredutível do grupo de rotações é dado pelo produto vetorial de
dois vetores. Lembramos primeiramente que o produto das componentes de dois vetores quaisquer
se transforma como um tensor de posto 2. Podemos assim definir o tensor
Tij ≡ Ai Bj
( 44 )
Sob uma rotação, tal tensor se transforma, como:
Tij → Tij′ = Ril R jk Al Bk = Ril Al Bk R t kj = Ril Al Bk R −1kj
( 45 )
T → T′ = RTR−1
( 46 )
Ou seja,
Relatividade » Vetores, Escalares e Tensores
12
Qualquer tensor pode ser decomposto em uma parte simétrica e outra parte antissimétrica:
( 47 )
2T = TS + TA
No caso em análise, as componentes simétrica e antissimétrica são:
T s ij ≡ ( Ai B j + Bi Aj ) = T s ji
( 48 )
T Aij ≡ ( Ai B j − Bi Aj ) = −T A ji
A matriz antissimétrica tem componentes, a menos do fator meio, dadas por:
0
T = −C3
C
2
A
C3
0
−C1
−C2
C1 = C3 M z + C2 M y + C1M x
0
( 49 )
A matriz antissimétrica, definida em (000), tem portanto apenas três componentes. Ela se transforma como uma representação irredutível de dimensão 3.
A s matrizes definidas em (000) são dadas por
0 1 0
M Z = −1 0 0 ,
0 0 0
0 0 −1
M y = 0 0 0 ,
1 0 0
0 0 0
Mx = 0 0 1
0 −1 0
( 50 )
Elas são conhecidas como matrizes geradoras das transformações. Definimos as matrizes
geradoras de rotações em torno do i-ésimo eixo, representadas por Mi, como aquelas cujos
elementos de matriz são dados pela expressão geral:
( M i ) jk = εijk
( 51 )
Em que εijk é o tensor antissimétrico de Levi-Civita.
Em termos do tensor de Levi-Civita, o produto vetorial de dois vetores
C ≡ A× B
( 52 )
As componentes do vetor resultante se escrevem como
Ci ≡ εijk Aj Bk
Ci ≡ εijk Aj Bk
( 53 )
Relatividade » Vetores, Escalares e Tensores
13
Assim, o produto vetorial de dois vetores é uma grandeza física obtida como produto de componentes de vetores, que se transforma, por sua antissimetria, como uma representação do grupo de
rotações de dimensão 3. Ou seja, transforma-se como um vetor.
Rotação em torno de um eixo
Consideremos o caso de uma rotação em torno do eixo z. No caso de uma rotação contrária ao
sentido dos ponteiros do relógio, a matriz de rotação é dada por:
cos θ − senθ 0
Rz (θ) = senθ cos θ 0
0
0
1
( 54 )
Uma rotação no sentido dos ponteiros do relógio é dada por
cos θ senθ 0
Rz (−θ) = − senθ cos θ 0
0
0
1
( 55 )
trocar gama por θ
Daí infere-se que as coordenadas em um e outro sistemas de referência se relacionam de
acordo com a seguinte relação:
r = Rz (θ) r ′
( 56 )
Figura 6
Uma grandeza vetorial qualquer é tal que suas componentes se relacionam por meio das expressões:
F = Rz (θ) F ′
( 57 )
Ou mais explicitamente:
x cos θ − senθ 0 x′
′
y = senθ cos θ 0 y
z 0
0
1 z′
x′ cos θ senθ 0 x
′
y = − senθ cos θ 0 y
z′ 0
0
1 z
( 58 )
Relatividade » Vetores, Escalares e Tensores
14
Enquanto que as matrizes de rotação em torno dos eixos x e y para rotações contrárias ao ponteiro dos relógios são dadas, respectivamente, por
0
0
1
Rx ( θ ) = 0 cos θ − senθ
0 senθ cos θ
( 59 )
cos θ 0 senθ
Ry ( θ ) = 0
1
0
− senθ 0 cos θ
( 60 )
e
Matrizes de Rotação em termos
de Matrizes Geradoras
Uma rotação em torno de qualquer um dos eixos pode ser escrita como
Rx (θ) = eiθM x ,
Ry (θ) = e
iθM y
,
Rz (θ) = eiθM z
( 61 )
As matrizes geradoras são tais que seus elementos de matriz são dados por:
( M i ) jk = ε ijk
( 62 )
O que pode ser demonstrado a partir das propriedades das matrizes geradoras, tais como:
(M )
Z
2
1 0 0
= − 0 1 0,
0 0 0
(M )
z
4
1 0 0
= 0 1 0
0 0 0
(M )
Z
3
( )
= − MZ
( 63 )
Bem como da expansão análoga à expansão de Taylor:
1
1
2
3
( iθ ) M z 2 + ( iθ ) M z 3 + .....
2!
3!
2
M
1
2
3
= 1 + z ( iθ ) + ... + M z iθ + ( iθ ) + ....
3!
2!
eiθM z = 1 + iθM z +
( 64 )
Relatividade » Vetores, Escalares e Tensores
15
As matrizes geradoras são dadas, formalmente, pelas expressões:
dR (θ)
M x = x = ε1 jk
d θ θ=0
dR (θ)
My = y
= ε 2 jk
d θ θ=0
dR (θ)
Mz = z
= ε3 jk
d θ θ=0
( 65 )
Rotação mais geral
Uma rotação, a mais geral possível, pode ser parametrizada em termos de três ângulos, denominados ângulos de Euler. Para o entendimento de tais ângulos, consideremos dois sistemas diferindo entre si por uma rotação pura. Ou seja, as origens dos dois sistemas cartesianos coincidem.
Figura 7: Dois sistemas.
São eles equivlentes?
Figura 8: Diferenças de coordenadas
quando efetuamos rotações.
Consideremos agora esses sistemas de eixos cartesianos rotacionados da forma mais geral
possível. Denotaremos os eixos do primeiro sistema cartesiano com as letras (x, y, z), ao passo que
os eixos do segundo sistema será denotado por (x′, y′, z′) (vide Figura 000).
Relatividade » Vetores, Escalares e Tensores
Figura 9
16
Figura 10
Nessas circunstâncias, e como pode ser observado na Figura 000, o plano z−y, associado ao
sistema antes da rotação, cruza com aquele depois da rotação, o plano que denominamos x′−y′, ao
longo de um eixo conhecido como linha nodal.
Um dos ângulos de Euler, representado pela letra θ, é formado pelos eixos z e z′. Esse é o ângulo
mais fácil de ser reconhecido. Para identificar os outros dois, devemos considerar a linha nodal.
Figura 11
Note-se que o plano x′ y′ perfura o plano xy, determinando um segmento de reta: a linha nodal,
mencionada anteriormente. Seu papel é muito importante, uma vez que dois ângulos de Euler são
definidos tomando-se essa linha como referência. Assim, os ângulos de Euler, aqui representados
pelas letras ϕ e ψ, são definidos como os ângulos entre os eixos e x e x′, respectivamente, com a
linha nodal.
Figura 12
Relatividade » Vetores, Escalares e Tensores
17
O fato é que podemos fazer os três eixos coincidirem, fazendo uma rotação em torno do eixo z
por um ângulo ϕ; em seguida, uma rotação do ângulo θ em torno da linha nodal; e, finalmente, uma
rotação de um ângulo ψ em torno do eixo z′.
Para fazê-los coincidir, o ângulo ϕ deve ser formado pela linha nodal e o eixo x. Este é o primeiro
dos ângulos de Euler, já referidos. Ao efetuarmos essa primeira rotação, os eixos (x, y, z) serão
transformados em novos eixos, designados por (x″, y″, z″).
Em seguida, efetuamos uma rotação em torno da linha nodal por um ângulo θ, outro ângulo de
Euler. Ao efetuarmos essa primeira rotação, os eixos (x, y, z) serão agora transformados em novos
eixos, designados por (x′′′, y′′′, z′′′). Como a linha nodal é perpendicular tanto a z quanto a z′, podemos,
por meio dessa rotação, fazer os eixos z e z′ coincidirem. Essa coincidência se expressa como:
z′′′ = z′
( 66 )
Finalmente, efetuamos uma rotação do sistema (x′′′, y′′′, z′′′), de tal forma que ele coincida com
o sistema (x′, y′, z′). Para isso, basta efetuar um rotação em torno do eixo z′, de modo que a linha
nodal coincida com o eixo x′. O ângulo de rotação agora é o terceiro ângulo de Euler, designado
pela letra ψ.
Podemos fazer os dois sistemas coincidirem por meio de 3 (três) rotações sucessivas. Cada rotação
será caracterizada por um ângulo diferente.
A primeira rotação de um ângulo ϕ será em torno do eixo z. Essa rotação faz com que o eixo x
coincida com a linha nodal. Temos, portanto, que as coordenadas desse sistema se relacionam com
as anteriores da seguinte forma:
x cos ϕ − senϕ 0 x′′ x′′ cos ϕ senϕ 0 x
′′ ′′
y = senϕ cos ϕ 0 y ⇒ y = − senϕ cos ϕ 0 y
z 0
0
1 z′′ z′′ 0
0
1 z
( 67 )
Portanto, o versor perpendicular ao plano de rotação será perpendicular ao plano x−y, dado por:
k = ∇z
( 68 )
Relatividade » Vetores, Escalares e Tensores
18
Assim, nessa primeira rotação, somos levados a um segundo conjunto de eixos, designados por
duas linhas. Na notação anterior, temos que
r = Rz (ϕ) r ′′
( 69 )
Em seguida, fazemos uma rotação em torno da linha nodal de um ângulo θ. A linha nodal agora
é o eixo x″. Para uma rotação em torno desse eixo, temos, em primeiro lugar, que o versor
ortogonal ao plano de rotação será dado por:
i′′ = ∇x′′ ( x, y, z )
( 70 )
Figura 13
De acordo com (000), esse versor é dado por:
i′′ = cos ϕi + senϕj
( 71 )
Ao efetuarmos a segunda rotação em torno do eixo x″, podemos escrever:
r ′′ = Rx (θ) r ′′′
( 72 )
Daí infere-se que a relação entre as coordenadas será dada por:
Em que Rx(θ) é dado por:
r ′′′ = Rx (−θ) r ′′
( 73 )
0
0
1
Rx ( θ ) = 0 cos θ − sin θ
0 sin θ cos θ
( 74 )
Consequentemente, podemos escrever:
r = Rz (ϕ) r ′′ = Rz (ϕ) Rx (θ) r ′′′
( 75 )
Figura 14
Relatividade » Vetores, Escalares e Tensores
19
Finalmente, quando efetuamos a última rotação em torno do eixo z′, de um ângulo ψ, obtemos
r ′′′ = Rz (ϕ) r ′
( 76 )
r ′ = Rz (−ϕ) r ′′
( 77 )
r = Rz (ψ ) Rx (θ) Rz (ϕ) r ′
( 78 )
Ou, de maneira equivalente:
Obtemos finalmente que
Portanto, a matriz de rotação mais geral é dada pelo produto
R ( ψ, θ, ϕ ) = Rz (ψ ) Rx (θ) Rz (ϕ)
( 79 )
r ′ = Rz (−ϕ) Rx (−θ) Rz (−ψ ) r
( 80 )
A relação inversa é:
Lembrando que a transposta de um produto de matrizes é igual ao produto das matrizes
transpostas, mas na ordem inversa, isto é:
RT ( ψ, θ, ϕ ) = Rz T (ϕ) RxT (θ) Rz T (ψ ) = Rz (−ϕ) Rx (−θ) Rz (−ψ )
( 81 )
Pode-se facilmente verificar que a matriz transposta é a matriz inversa na rotação:
RT ( ψ, θ, ϕ ) R ( ψ, θ, ϕ ) = R −1 ( ψ, θ, ϕ ) R ( ψ, θ, ϕ ) = 1
( 82 )
Observe-se que o versor ortogonal ao plano de rotação será dado, nesse caso, por:
k ′ = ∇z ′ ( x , y , z )
( 83 )
Figura 15
Relatividade » Vetores, Escalares e Tensores
20
De acordo com (000), esse versor pode ser escrito em temos dos versores da base inicial, como:
k ′ = ∇z ′ ( x , y , z )
( 84 )
r ′′′ = Rx (−θ) Rz (−ϕ) r
( 85 )
Lembrando que
Obtemos:
0
0 cos ϕ senϕ 0 x
x′′′
1
′′′
y
= 0 cos θ senθ −senϕ cos ϕ 0 y
z′′′ ≡ z′ 0 −senθ cos θ 0
0
1 z
( 86 )
De (000) e (000), segue que o versor ortogonal ao plano de rotação será dado por:
k ′ = senθsenϕi − senθ cos ϕj + cos θk
Figura 16
( 87 )
Relatividade » Vetores, Escalares e Tensores
21
Como usar este ebook
Orientações gerais
Caro aluno, este ebook contém recursos interativos. Para prevenir problemas na utilização desses recursos, por favor acesse o arquivo
utilizando o Adobe Reader (gratuito) versão 9.0 ou mais recente.
Botões
Indica pop-ups com mais informações.
Ajuda (retorna a esta página).
Sinaliza um recurso midiático (animação, áudio etc.) que pode
estar incluído no ebook ou disponível online.
Créditos de produção deste ebook.
Indica que você acessará um outro trecho do material.
Quando terminar a leitura, use o botão correspondente ( )
para retornar ao ponto de origem.
Bons estudos!
Relatividade » Vetores, Escalares e Tensores
Créditos
Este ebook foi produzido pelo Centro de Ensino e Pesquisa Aplicada (CEPA), Instituto de Física da Universidade de São Paulo (USP).
Autoria: Gil da Costa Marques.
Revisão Técnica e Exercícios Resolvidos: Paulo Yamamura.
Coordenação de Produção: Beatriz Borges Casaro.
Revisão de Texto: Marina Keiko Tokumaru.
Projeto Gráfico e Editoração Eletrônica: Daniella de Romero Pecora, Leandro de Oliveira e Priscila Pesce Lopes de Oliveira.
Ilustração: Alexandre Rocha, Aline Antunes, Benson Chin, Camila Torrano, Celso Roberto Lourenço, João Costa, Lidia Yoshino,
Maurício Rheinlander Klein e Thiago A. M. S.
Animações: Celso Roberto Lourenço e Maurício Rheinlander Klein.
22