SISTEMA DE CAPTAÇÃO DE IMAGEM POR COMANDO DE VOZ
Hélio Alves de Souza1, Lucinéia Aparecida da Silva2, Fernando Luís Guarnieri3
1
Universidade do Vale do Paraíba/FEAU, Estr. Municipal do Limoeiro 250, Bairro Jardim Dora, Jacareí –SP.
[email protected], [email protected], [email protected].
Resumo- Este trabalho apresenta o desenvolvimento de um sistema de captação de som e imagem para
uso em videoconferência, controlado por comando de voz, cujos sinais são capturados através de
microfones dispostos em ângulos previamente determinados ( 0°, 60°, 120° e 180° ). Os sinais capturado s
são amplificados, tratados e enviados a um microcontrolador que identifica a fonte de origem, seleciona a
de maior amplitude e posiciona uma câmera para esta fonte geradora. O posicionamento é feito através de
um mini servo motor que gira a base onde está fixada a câmera. A imagem captada é projetada em um
monitor e pode ser enviada, via software, a qualquer destino desejado.
Palavras-chave: Voz Humana, Intensidade, Microcontrolador, Servo motor, Imagem.
Área do Conhecimento: Engenharia Elétrica
Introdução
A comunicação primária do homem é a fala.
Com o passar do tempo, tecnologias surgiram
possibilitando que a voz e outras fontes sonoras
pudessem ser representadas de forma linear.
Sendo assim, algumas características podem ser
analisadas. A freqüência fundamental do sinal de
voz está relacionada com o número de ciclos de
vibrações completadas por segundo. Esta
freqüência varia de 300Hz a 3,4kHz (ERNANDES,
1995).
Um ponto fundamental para o sucesso de
sistemas automatizados é a sua interação com os
humanos. Um caso em que se destaca esta
necessidade é o ambiente de videoconferência,
onde câmeras e microfones devem ser
direcionados à pessoa que está discursando no
momento. Os sistemas de videoconferência
possibilitam a comunicação entre grupos de
pessoas independentemente de suas localizações
geográficas, através de áudio e vídeo
simultaneamente. Esses sistemas permitem
muitas vezes que se trabalhe de forma
cooperativa e se compartilhe informações e
materiais de trabalho sem a necessidade de
locomoção geográfica (ANDRIANI, 2001).
O uso de telefonia também é uma alternativa
na implementação de conferências remotas. No
entanto, o fato de se poder acrescentar vídeo
sincronizado
ao
som
nas
sessões
de
videoconferência, o que não é possível nas
comunicações telefônicas, representa um grande
avanço nas possibilidades de expressividade
envolvidas no diálogo, uma vez que, sabidamente,
a expressão corporal corresponde a 70-80% das
impressões de uma conversa.
O projeto desenvolvido consiste em um sistema
automatizado que atende às necessidades do
ambiente de videoconferência, não sendo
necessária a interação humana, pois a
movimentação angular da câmera para a captação
da imagem do participante é feita através da
detecção da fonte geradora do sinal de voz, e toda
esta informação é enviada aos demais
participantes.
Metodologia:
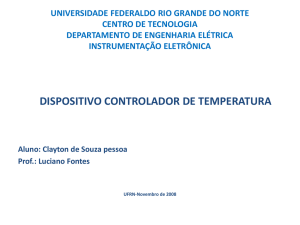
Optou-se por utilizar quatro microfones de
eletreto do tipo pedestal, pois favorecem a
aproximação do interlocutor, captando o sinal de
forma eficaz. Uma vez captado, o sinal passa por
um amplificador operacional LM386, cujo ganho é
ajustado através de um resistor variável de 10kΩ.
O circuito da Figura 1 mostra a configuração
utilizada.
Figura 1 – Circuito Amplificador
XIII Encontro Latino Americano de Iniciação Científica e
IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba
1
Para que não haja necessidade de
chaveamento dos sinais captados através dos
microfones, em forma de amostragem, é utilizado
um amplificador para cada entrada.
O LM386 é um pequeno amplificador de áudio
de baixa potência, de oito pinos, alimentado por
uma fonte DC de 5V.
O capacitor C1 tem a função de deixar passar
apenas o sinal de áudio captado pelo microfone 1.
O resistor R1 polariza o microfone de eletreto. C2
e R2 filtram possíveis transientes do amplificador
operacional, deixando passar somente a faixa
audível. Para desacoplar o sinal na saída, utilizase o capacitor C9.
Os demais circuitos amplificadores funcionam
de forma idêntica ao circuito descrito acima.
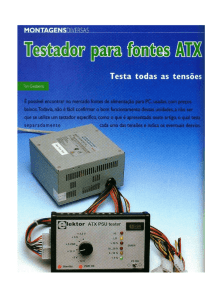
Uma vez captado e amplificado, o sinal é
enviado a um circuito composto por um
microcontrolador PIC 16F877A, um cristal de
4MHz e dois capacitores de 27pF, utilizados como
oscilador. A Figura 2 mostra a pinagem do PIC
utilizado (SOUSA, 2003).
Este servo não chega a dar sequer uma volta
completa
no
seu
eixo.
Entretanto,
as
características deste motor permitem controlar
com precisão o ângulo de posicionamento dentro
dessa faixa.
Figura 3 - Mini servomotor
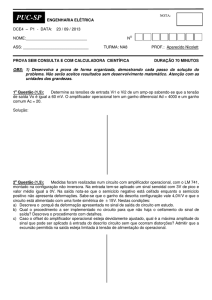
De sua carcaça saem três cabos (Figura 4). O
vermelho e o preto são respectivamente para a
tensão de alimentação e para a referência de
terra. O outro fio, que costuma ser branco ou
amarelo, é o cabo de controle, pelo qual chegam
os sinais que informam o ângulo (entre 0 e 180
graus) no qual o servo deve se posicionar (Figura
5).
Figura 2- Pinagem do PIC 16F877A
A partir da identificação da fonte de maior
intensidade o microcontrolador faz a verificação de
posição inicial da câmera, soma ou subtrai o
ângulo necessário para que haja coincidência
entre as fontes de imagem e áudio.
O movimento da base giratória, onde está
fixada a câmera, é efetuado por um mini servo
motor (Figura 3), que não necessita de grande
torque. O motor utilizado neste projeto possui uma
faixa de posicionamento de aproximadamente 180
graus.
Figura 4. Servo de posição desmontado
XIII Encontro Latino Americano de Iniciação Científica e
IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba
2
Figura 5. A imagem acima mostra os tempos de
cada pulso (em milisegundos) e sua posição no
eixo do servo respectiva.
O diagrama em blocos (Figura 6) mostra a
disposição dos principais elementos do circuito.
Figura 7 – Diagrama esquemático
Resultados
O circuito foi elaborado e testado através do
software Proteus, no qual foi confirmado seu
funcionamento. A fase atual do projeto contempla
a elaboração de sua programação, e para tal está
sendo utilizada a linguagem C.
Paralelamente à elaboração do programa, está
sendo realizada a montagem do circuito e após
esta etapa deverá ser submetido a testes em
laboratório.
Discussão
Figura 6. Diagrama em blocos
A movimentação da câmera permite a
aquisição de imagens com um campo de visão de
180 graus. Este tipo de sistema é obtido através
da combinação das imagens provenientes de uma
única câmera que gira em torno de um eixo. Sua
velocidade é controlada para que não haja
trepidações que possam prejudicar a qualidade da
imagem (BIANCHI, 2005).
A Figura 7 apresenta o diagrama esquemático,
que mostra a interligação dos elementos do
circuito. Nas saídas dos amplificadores os sinais
são analógicos, e cada saída é conectada a uma
entrada
analógica
do
microcontrolador.
Internamente o PIC16F877A efetua a conversão
para sinais digitais, tornando possível o
processamento desses sinais.
Na configuração inicial, a idéia seria a
utilização de amplificador
monolítico de
instrumentação, o uso deste tipo de amplificador
seria devido à facilidade na obtenção de ganho
fixo, não sendo necessária a utilização de circuitos
periféricos,
que
poderiam
gerar
ganhos
diferenciados. Porém devido à dificuldade na
obtenção deste tipo de componente optou-se por
utilizar o LM386, uma vez que na simulação não
foi observado grandes variações de ganho e o
circuito funcionou de acordo com o planejado.
A
princípio
seriam
utilizados
circuitos
integradores para tratar os sinais analógicos das
saídas dos amplificadores antes de enviá-las a
PIC. Não foi necessária a utilização deste recurso,
pois o microcontrolador escolhido, tem entre suas
funções, a conversão dos sinais analógicos para
digitais.
XIII Encontro Latino Americano de Iniciação Científica e
IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba
3
Conclusão
Embora os resultados tenham sido obtidos
somente em simulação até esta fase do projeto, foi
observado um bom nível de confiabilidade nas
propostas e os componentes utilizados atendem
perfeitamente às necessidades, e todo esse
conjunto de dados direciona para o sucesso na
implantação deste sistema.
Referências
- ANDRIANI, Ricardo A. e SOVIERZOSKI, Miguel
A.
Localizador
de
fonte
sonora
para
videoconferência, CEFET-PR, 2001. Disponível
em:
http://www.cpdee.ufmg.br/~semea/anais/artigos/Ri
cardoAndriani.pdf. Acesso em 26/03/2009.
- BIANCHI, Reinaldo A. C. Sistema de visão
ominiderecional para o monitoramento de
descargas atmosféricas, Centro Universitário da
FEI,
2005.
Disponível
em:
http://www.fei.edu.br/~rbianchi/publications/sbai20
05.pdf. Acesso em 26/03/2009.
- ERNANDES, Ivan F. The Voice of Men and
Machines,
UFPR,
1995.
Disponível
em:
http://www.eletrica.ufpr.br/marcelo/.../IvanVoiceMenMachines.doc. Acesso em 12/03/2009.
- SOUSA, Daniel R. de e SOUZA, David J. de.
Desbravando PIC. ERICA, 2002.
XIII Encontro Latino Americano de Iniciação Científica e
IX Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba
4