29
C APÍTULO 4
D INÂMICA DA P ARTÍCULA : I MPULSO E Q UANTIDADE DE M OVIMENTO
Neste capítulo será analisada a lei de Newton na forma de integral no
domínio do tempo, aplicada ao movimento de partículas. Define-se o conceito de
impulso e quantidade de movimento e através da integração da lei de Newton ao
longo do tempo podemos relacionar as forças aplicadas num intervalo de tempo
com a variação da velocidade vetorial.
4.1
PRINCÍPIO DO I MPULSO E DA Q UANTIDADE DE M OVIMENTO L INEAR
Vamos partir da formulação diferencial da lei de Newton
F
ma
m
dv
dt
(4.1)
Tomando a diferencial de (4.1) e integrando entre os instantes de tempo t 1 e t 2 ,
sendo v 1 e v 2 as velocidades da massa m nestes instantes, obtemos
t2
t1
F dt
v2
m dv
(4.2)
mv 2 mv1
(4.3)
v1
ou
t2
t1
F dt
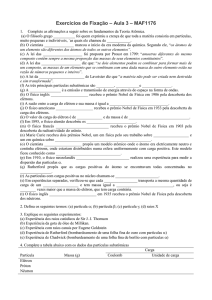
Vamos definir o impulso de uma força num intervalo de tempo como
30
I1
t2
2
t1
(4.4)
F dt
Esta grandeza é vetorial e a sua intensidade corresponde à área da curva mostrada
na Figura 4.1, entre os instantes t 1 e t 2 .
F
A
t1
t2
t
Figura 4.1 - Impulso de uma força F.
A quantidade de movimento linear de uma partícula, ou simplesmente quantidade de
movimento, é definida por
L mv
(4.5)
onde v é a velocidade da partícula de massa m. A partir dessas definições o
princípio do impulso e da quantidade de movimento (4.3) pode ser escrito como
L1
I1
2
L2
(4.6)
Em palavras, o quantidade de movimento linear num instante t 2 é igual à quantidade
de movimento linear num instante t 1 mais a soma dos impulsos de todas as forças
aplicadas à partícula entre estes instantes.
Este princípio está escrito na sua forma vetorial. Em componentes
retangulares, a forma (4.3) é dada por
31
t2
m vx1
t1
t2
m v y1
t1
t2
m vz 1
4.2
t1
Fx dt
m vx 2
Fy dt
m vy2
Fz dt
m vz 2
(4.7)
PRINCÍPIO DO I MPULSO E DA Q UANTIDADE DE M OVIMENTO L INEAR
S ISTEMA DE PARTÍCULAS
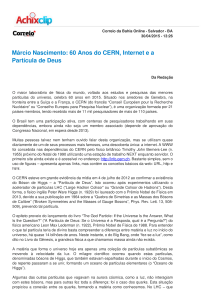
Seja um sistema de partículas, mostrado na Figura 4.2, onde F i é a resultante
externa na partícula i e f i representa uma força interna.
y
fi
G
Fi
rG
ri
x
z
Figura 4.2 - Sistemas de partículas.
O princípio do impulso de da quantidade de movimento aplicado à i-ésima partícula
do sistema é dado
mi v1i
t2
t1
t2
Fi dt
t1
f i dt
mi v 2 i
(4.8)
Somando para todas a i partículas do sistema resulta:
mi v1i
t2
t1
Fi dt
t2
t1
f i dt
mi v 2 i
(4.9)
Sabendo que a soma de todos os impulsos das forças internas f i é nula, obtemos
32
t2
mi v1i
t1
Fi dt
mi v 2i
(4.10)
Lembrando a definição do centro de massa G de um sistema de partículas,
m rG
(4.10)
mi ri
onde
m
mi é a massa total do sistema
r G é a posição do centro de massa do sistema
r i é a posição da i-ésima massa do sistema
Através da derivação no tempo de (4.10) obtemos
m vG
(4.11)
mi vi
onde
v G é a velocidade do centro de massa do sistema
v i é a velocidade da i-ésima massa do sistema
Portanto o princípio do impulso e da quantidade de movimento (4.10) pode ser
escrito como
t2
m vG 1
4.3
t1
Fi dt
m vG 2
(4.12)
C ONSERVAÇÃO DA Q UANTIDADE DE M OVIMENTO L INEAR
Se a resultante de todas as forças externas que atuam numa partícula de
massa m for nula, então a quantidade de movimento se conserva, ou seja
mv1
mv2
C
(4.13)
33
e, portanto, a velocidade da partícula é constante. Por outro lado, se num sistema
de partículas não há forças externas atuantes, ou a soma dos impulsos das forças
externas é nula, podemos escrever:
m vG 1
m vG 2
(4.14)
C
e, portanto, a velocidade do centro de massa G do sistema se mantém constante.
4.4
I MPACTO
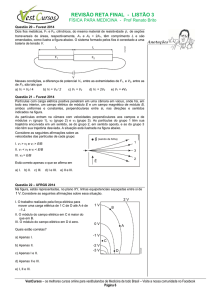
Vamos inicialmente definir, para duas partículas que se colidem, impacto
central e impacto oblíquo. Conforme mostra a figura 4.3 no impacto central as
direções das velocidades das partículas, antes do impacto, coincidem com a linha de
impacto. Por outro lado, no impacto oblíquo pelo menos uma das direções das
velocidades antes do impacto não coincide com a linha de impacto.
Plano de contato
Plano de contato
vA
A B
A B
vB
Linha de impacto
vA
a - central
vB
b - oblíquo
Figura 4.3 - Impacto entre duas partículas A e B.
Impacto Central
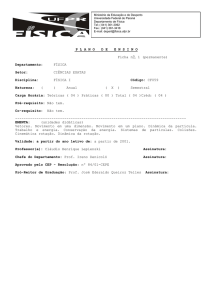
Vamos inicialmente considerar apenas os impactos centrais. Consideremos a
Figura 4.4 que mostra cinco situações que correspondem ao instante de tempo
antes do impacto, intervalo de tempo durante o impacto na fase de deformação,
instante de tempo de deformação máxima, intervalo de tempo durante o impacto na
fase de restauração e instante de tempo após o impacto.
34
A
B
vA1
vB1
a - antes do impacto: v A1 > v B1
v
- Rdt
Rdt
- Pdt
Pdt
AB
A B
A B
b - durante o impacto
A
vA2
B
vB2
c - após o impacto: v B2 > v A2
Figura 4.4 - Fases do impacto entre duas partículas A e B.
Em muitos problemas as velocidades iniciais v A1 e v B1 antes do impacto são
conhecidas e desejamos calcular as velocidades após o impacto v A2 e v B2 . Durante a
colisão entre A e B, as ações entre ambas são internas ao sistema e, portanto, de
impulso resultante nulo. Logo, podemos escrever para o sistema:
mAv A1 mBvB1
mAv A2 mBvB 2
(4.15)
Como temos duas incógnitas, é necessária outra equação para se calcular as
velocidades após o impacto. Vamos aplicar o princípio do impulso e da quantidade
de movimento a cada uma das partícula. Para a partícula A, na fase de deformação,
até alcançar a máxima deformação, onde as velocidades de ambas as partículas são
iguais a v, obtemos
35
mAv A1
P dt
m Av
(4.16)
m Av A 2
(4.17)
e na fase de restituição
m Av
R dt
De (4.16) e (4.17) obtemos:
R dt
P dt
m Av m Av A2
m A v A1 m A v
v v A2
v A1 v
(4.18)
Para a partícula B, na fase de deformação, até alcançar a máxima deformação, onde
as velocidades de ambas as partículas são iguais a v, obtemos
mB v B 1
P dt
mB v
(4.19)
mB vB 2
(4.20)
e na fase de restituição
mB v
R dt
De (4.19) e (4.20) obtemos:
R dt
P dt
mB v B 2 mB v
mB v mB v B 1
vB 2 v
v vB 1
(4.21)
Define-se coeficiente de restituição e ao quociente entre os impulsos da força de
restituição R e da força de deformação P
e
R dt
P dt
(4.22)
36
Assim, podemos escrever a equação (4.18) e a (4.21), respectivamente, como
e
v v A2
v A1 v
(4.23)
e
vB 2 v
v vB 1
(4.24)
e
Eliminando v em (4.23) e substituindo em (4.24) obtemos finalmente
e
vB 2 v A 2
v A1 vB1
(4.25)
ou
e (v A1
v B1 )
vB 2
(4.26)
v A2
Assim temos um sistema de duas equações, (4.15) e (4.25) ou (4.26), que permite
calcular as velocidades das partículas A e B após o impacto, dadas as respectivas
velocidades antes do impacto e o coeficiente de restituição e. São considerados
dois casos limites para este coeficiente.
Impacto elástico: não há perda de energia e os impulsos de deformação e de
restauração são iguais.
R dt
P dt
e=1
Impacto plástico: não há impulso de restituição e as partículas se movem
juntas após o impacto. Neste caso basta usar a equação (4.15) fazendo v B2 = v A2 .
R dt
0
e=0
Em situações reais, ocorre freqüentemente que apenas parte da energia se
perde em deformação. Nestes casos tem-se um impacto parcialmente elástico.
R dt
P dt
0<e<1
37
Impacto Oblíquo
Para o caso de impacto oblíquo, vamos adotar o eixo x na direção da linha
de impacto entre as partículas A e B, conforme mostra a Figura 4.5.
y
A B
vB
vA
x
Figura 4.5 - Impacto oblíquo entre duas partículas A e B.
Como as forças de deformação e restauração durante o impacto atuam
apenas na direção x, podemos escrever para esta direção:
mAv A1x
mB v B1x
e (v A1 x
vB1 x )
mAv A 2 x
(4.27)
mB v B 2 x
e
vB 2 x
(4.28)
v A2 x
Para a direção y, a conservação da quantidade de movimento do sistema é dada por
mAv A1 y
mB v B1 y
m Av A 2 y
mB v B 2 y
(4.29)
Como durante o impacto não há forças impulsivas em cada partícula na direção y, a
quantidade de movimento de cada uma se conserva e
m Av A1 y
Logo v A 2 y
m Av A 2 y
v A1 y e vB 2 y
e
mB v B 1 y
mB v B 2 y
(4.30)
vB 1 y . Assim, no caso do impacto oblíquo apenas as
componentes na direção x das velocidades após o impacto necessitam ser calculadas
através das equações (4.27) e (4.28), uma vez que na direção y as componentes das
velocidades não se alteram com a colisão segundo (4.30).
38
4.5
Q UANTIDADE DE M OVIMENTO A NGULAR
A quantidade de movimento angular de uma partícula em relação a u m ponto
O é o momento da quantidade de movimento em relação a este ponto. A partir
desta definição escreve-se
HO
(4.31)
r mv
y
mv
P
HO
r
x
O
z
Figura 4.6 - Quantidade de movimento angular H O .
A partir da definição (4.31), o vetor quantidade de movimento angular H O tem
direção perpendicular ao plano que contém os vetores posição r e velocidade v e o
seu sentido é dado pela regra da mão direita. Em componentes retangulares pode
ser calculado através de
HO
i
j
k
rx
ry
rz
mvx
mvy
mvz
(4.32)
onde
H Ox
m ( ry vz
rz v y )
H Oy
m ( rz v x
rx vz )
H Oz
m ( rx v y
ry v x )
(4.33)
Observe que no caso do movimento no plano xy, r z = 0 e v z = 0. Portanto obtemos
H Ox = 0 e H Oy = 0. Assim temos no caso plano
39
HO
H Oz
m ( rx v y
(4.34)
ry v x )
Para interpretação geométrica, vamos considerar o caso de um movimento no plano
xy, conforme mostrado na Figura 4.7.
y
x
mv
d
HO
O
P
x
z
Figura 4.7 - Quantidade de movimento angular no movimento plano.
Podemos observar que o módulo de H O pode ser obtido por
HO
4.6
r mv sen
(d )( mv)
(4.35)
Q UANTIDADE DE M OVIMENTO A NGULAR E M OMENTO DE UMA F ORÇA
Vamos escrever o momento resultante de todas as forças que atuam numa
partícula em relação a um ponto O. Da definição de estática
MO
r
F
(4.36)
Pela segunda lei de Newton
MO
r ma
(4.37)
Agora vamos derivar no tempo a quantidade de movimento angular desta partícula
em relação ao ponto O. Derivando (4.31), obtemos
dH O
dt
dr
dv
mv r m
dt
dt
(4.38)
40
A primeira parcela de (4.38) é igual a zero , pois os vetores v e mv são paralelos.
Portanto (4.38) é igual a
dH O
dt
(4.39)
r ma
Comparando (4.37) e (4.39), resulta que
dH O
dt
MO
4.7
(4.37)
PRINCÍPIO DO I MPULSO E DA Q UANTIDADE DE M OVIMENTO A NGULAR
A partir de (4.37) podemos escrever
M O dt
(4.38)
dH O
Integrando (4.38) entre os instantes de tempo t 1 e t 2
t2
t1
M O dt
t2
t1
dH O
HO2
H O1
(4.39)
Portanto, o princípio do impulso e da quantidade de movimento angular para uma
partícula é dado por
t2
H O1
t1
M O dt
HO2
(4.40)
Definindo o impulso angular A O de uma força F em relação a um ponto O, entre os
instantes de tempo t 1 e t 2 , como
AO 1
t2
2
t1
( r F ) dt
podemos escrever (4.40) como
t2
t1
MO dt
(4.41)
41
HO1
AO 1
(4.42)
HO 2
2
Quando a soma de todos os impulsos angulares atuantes numa partícula é
nula, temos
H O1
(4.43)
HO2
que é a equação da conservação da quantidade de movimento angular.
Seja definido um sistema de partículas. Para cada uma dessas partículas
podemos aplicar a equação (4.40). A soma de todas estas equações é igual a
t2
H O1
t1
M O dt
HO2
(4.44)
onde
HO
(ri mvi ) é a soma das quantidades de movimento angular de
todas as partículas em determinado instante, aplicada nos instante t 1 e t 2 , e
t2
t1
MO dt
t2
t1
( ri FEi ) dt é a soma dos impulsos angulares de todas as
forças externas aplicadas às partículas, uma vez que o impulso angular resultante de
todas as forças internas é nulo.
Quando a soma de todos os impulsos angulares atuantes neste sistema é
nula, temos que
H O1
HO 2
(4.45)
que é a equação da conservação da quantidade de movimento angular de um
sistema de partículas.