!""#
Capítulo III
DINÂMICA
1. Introdução
Dinâmica é, por definição, o estudo da relação entre o movimento dos corpos e as
suas causas. Tal como no capítulo anterior, neste capítulo iremos estudar a dinâmica
de corpos que, pelas suas dimensões, se podem reduzir a um ponto. Esta
aproximação, que é válida em muitas circunstâncias, designa-se por aproximação do
ponto material. A Dinâmica de um corpo cujas dimensões não podem ser
desprezadas será abordada no capítulo V dedicado ao estudo do corpo rígido.
Como vimos em Cinemática, a posição de um ponto material é descrita pelo seu
vector posição,
, e o movimento é descrito pela sua variação, que se caracteriza
pelas grandezas velocidade e aceleração
=
=
=
As causas dos movimentos são atribuídas às Forças. O conceito de força é um
conceito intuitivo a que a Dinâmica irá dar uma descrição formal. A força, tal como
as grandezas que caracterizam o movimento, é uma grandeza vectorial, tem um
módulo, uma direcção e um sentido. As forças traduzem interacções entre corpos,
que podemos genericamente agrupar em acções de “contacto” de um corpo sobre
outro (atrito, tensão num fio, reacção normal, impulsão) ou acções “à distância” de
um campo (o campo gravitacional, o campo eléctrico, o campo magnético).
Até Galileu, a interpretação da relação entre as forças e o movimento foi dominada
pelos conceitos dos filósofos gregos, como Aristóteles. Para estes pensadores, a
acção de uma força constante deveria provocar um movimento com velocidade
constante. Aumentando a força observaríamos um aumento da velocidade do corpo.
Esta interpretação parecia funcionar bem para os corpos que eram puxados
mecanicamente, como uma quadriga atrelada a cavalos, mas tinha imensa
dificuldade em explicar o movimento de projécteis. Nos projécteis, após o
lançamento inicial não há aparentemente nenhuma força a actuar e no entanto eles
movem-se. Para explicar o movimento dos projécteis os filósofos gregos eram
obrigados a postular uma interacção complicada com o ar, dizendo que o projéctil
empurrava o ar à sua fronte que formaria turbilhões de tal forma que esses
turbilhões empurrariam o projéctil por trás. Esta explicação parecia ser suficiente
para uma Filosofia que se baseava sobretudo no pensamento e não na observação.
Tudo isto mudou com Galileu que, através da experimentação, concluiu sobre a
verdadeira relação entre as forças e o movimento. Galileu terá enunciado esta
relação através da sua Lei da Inércia de Galileu, que mais tarde foi aproveitada por
Newton para apresentar aquilo que é hoje conhecida como a 1ª lei de Newton.
Cap.3-1
!""#
2. As 3 leis de Newton
2.1 A 1ª lei de Newton, ou lei da Inércia
“Na ausência de qualquer força, um corpo ou está em repouso, ou tem
movimento rectilíneo uniforme”.
Esta lei encerra vários ensinamentos. Quando a lei se refere ao repouso ou ao
movimento rectilíneo uniforme, isto representa movimentos em que o vector
velocidade é constante, =
, isto é, são movimentos em que o vector aceleração
é nulo, = . Por isso, podemos entender a primeira lei como dizendo que, quando a
força é nula, então a aceleração também é nula
=
=
=
Este enunciado contraria de todo o conceito filosófico aceite até então relativo á
dinâmica dos corpos em movimento.
Se a força não for nula, então a consequência será, não uma velocidade constante,
mas sim uma variação da velocidade, uma aceleração diferente de zero, isto é, forças
causam acelerações
≠
∆ ≠
≠
Uma outra maneira de ler a 1ª lei de Newton, ou a lei da Inércia, é dizer que um corpo
só altera o seu estado de repouso ou de movimento rectilíneo uniforme (MRU), se
sofrer a acção de forças. Isto é, os corpos resistem naturalmente à alteração do seu
estado de repouso ou MRU. Chamamos Inércia precisamente a esta propriedade dos
corpos em resistir à mudança do seu estado de repouso ou MRU. Quanto mais difícil
for alterar o seu estado, maior será a sua inércia.
2.2 A 2ª lei de Newton, a lei fundamental da Dinâmica
A observação da relação entre as forças e as acelerações por elas provocadas levou
ao enunciado da 2ª lei de Newton ou a lei fundamental da Dinâmica:
“As forças são directamente proporcionais às acelerações que produzem e o
coeficiente de proporcionalidade chama-se massa.”
Esta lei é mais conhecida pela sua expressão formal
=
Esta lei introduz uma nova grandeza, , que é a massa inercial, ou simplesmente
massa. Se imaginarmos que uma mesma força actua sobre diferentes corpos com
massas diferentes, a 2ª lei de Newton diz-nos que a aceleração produzida vale
=
isto é, a aceleração produzida é inversamente proporcional à sua massa. Vemos
assim que esta grandeza, massa, mede a resistência que o corpo oferece à alteração
do seu estado de repouso ou de movimento rectilíneo uniforme pela acção de uma
força, a massa mede a inércia do corpo. A massa é uma grandeza fundamental no
Sistema Internacional de unidades (SI) e a sua unidade é o quilograma, (notar o “k”
Cap.3-2
!""#
minúsculo).
Pela 2ª lei de Newton, a força passa a ser uma grandeza derivada que se define em
função da aceleração, uma grandeza cinemática, e do conceito de massa inercial. As
-2
dimensões de força são M.L.T (onde M representa massa, L comprimento e T o
tempo). Em homenagem a Newton, a unidade de força tem um nome particular que
vale precisamente newton (notar a letra pequena no nome da unidade)
=
Um
representa a força que é necessário exercer sobre uma massa de
para lhe imprimir uma aceleração de
.
Vejamos algumas consequências da 2ª lei de Newton.
Se um corpo for actuado por uma força constante então ele sofrerá um movimento
com aceleração constante. Como vimos da cinemática, se o movimento for rectilíneo
então ele será uniformemente variado, mas se o movimento for curvilíneo, então o
movimento será apenas variado. Um exemplo consiste no lançamento de projécteis
nas proximidades da superfície da Terra, que está sujeito a uma aceleração
constante. O primeiro caso corresponde ao movimento de um lançamento vertical,
enquanto que o segundo caso corresponde a um lançamento oblíquo.
O movimento circular uniforme, apesar de se processar com uma aceleração normal
que é constante em módulo, a direcção e sentido estão sempre a variar e por isso a
força que causa esse movimento não é uma força constante. Recordemos que a força
é uma grandeza vectorial.
mas ela de facto representa a
No enunciado da 2ª lei fala-se apenas de uma força
soma de todas as forças que estão aplicadas a um mesmo corpo, é a resultante das
forças aplicadas. A força é uma grandeza aditiva e os seus efeitos somam-se, tal
como se somam vectores
=
=
Se a soma de todas as forças que actuam sobre um corpo for nula, então por
consequência a aceleração resultante é nula e estamos nas condições designadas
por Equilíbrio
=
=
Este equilíbrio designa-se por estático, se tivermos simultaneamente que a
velocidade é nula, = , ou dinâmico, se a velocidade for constante mas diferente de
≠ .
zero, =
Aparentemente, recuperamos com a condição de equilíbrio, a 1ª lei de Newton. Será
que a 1ª lei é apenas um caso particular da 2ª lei?
Primeiro devemos começar por notar que a 1ª lei é a lei que introduz o conceito de
Inércia. Por outro lado, podemos interpretar a 1ª lei como sendo aquela que permite
identificar os referencias nos quais as leis da dinâmica de Newton se aplicam. Estes
referencias designam-se por referenciais inerciais. Os outros referenciais, nos quais
não se verifica a 1ª lei, são os referenciais não-inerciais. Vamos ilustrar esta
Cap.3-3
!""#
interpretação da 1ª lei através de dois exemplos.
Consideremos a situação de um astronauta que na sua nave espacial descreve uma
trajectória circular em torno da Terra. O astronauta sabe que todos os corpos na
proximidade da Terra são atraídos para o seu centro por uma força que os faz cair. O
astronauta sabe por isso que ele e os objectos que o rodeiam estão a ser atraídos
para a Terra por uma força. No entanto, quando ele se desloca na nave, ou larga um
objecto no seu interior, todas as trajectórias são de movimento rectilíneo e uniforme,
que pela 1ª lei de Newton, deveria corresponder à ausência de forças
=
≠
Como a 1ª lei de Newton é violada, o que o astronauta pode concluir, correctamente,
é que o seu referencial “nave espacial” não é um referencial inercial. Nele as leis de
Newton não se verificam.
A segunda situação corresponde à nossa experiência de nos deslocarmos num
automóvel que descreve uma curva. No interior do automóvel em movimento rectilíneo
uniforme todos os objectos estão em repouso e a aceleração é por isso nula. No
entanto ao se descrever uma curva os objectos e o próprio condutor são atirados
contra a janela, tendo um movimento em que a aceleração é diferente de zero. No
entanto, não houve nenhuma força conhecida que possa ser responsável por esse
estranho comportamento. Estamos aqui numa situação em que no referencial
“condutor” se observam acelerações sem a presença de uma força responsável
≠
=
Mais uma vez, o que o observador pode concluir é que o seu referencial não é um
referencial inercial e nele as leis de Newton não se verificam.
2.3 A 3ª lei de Newton, a lei da acção e reacção
Esta lei aplica-se a quaisquer interacções entre dois corpos, em que um actua sobre o
outro.
“A toda a acção de um corpo sobre outro corresponde uma reacção do segundo
sobre o primeiro, de igual módulo e direcção mas com sentido oposto.”
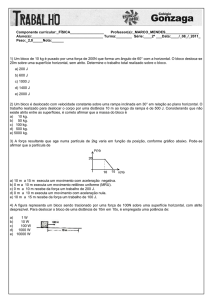
Para representar graficamente esta lei vamos
considerar dois corpos A e B que actuam
mutuamente um sobre o outro à distância,
como se mostra na figura 1. Se for
a força
que A exerce sobre B, então pela lei da acção e
reacção, o corpo A deve ser igualmente
actuado por uma reacção exercida por B sobre
A,
, de tal forma que
=−
Devemos salientar que as forças identificadas como acção e reacção se exercem
sobre corpos diferentes e por isso é errado dizer que se anulam mutuamente.
Cap.3-4
!""#
Quando damos uma palmada no tampo de uma mesa, estamos naturalmente a
exercer uma força sobre a mesa. No entanto, a nossa mão também sente essa
interacção, que pode mesmo ser dolorosa, é a força de reacção da mesa sobre a
mão.
3. Algumas das principais forças que actuam sobre os corpos
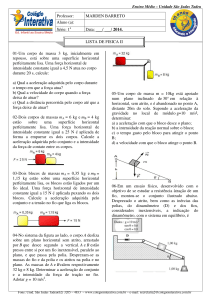
3.1 O peso
Todos os corpos que se encontram na vizinhança da
Terra, acompanhando o seu movimento de rotação, são
actuados por uma força que os atrai para um ponto
próximo do centro da Terra. Esta força é o peso.
É o próprio peso que define a direcção da vertical
quando penduramos uma massa por um fio. O peso é
por isso uma força vertical, de cima para baixo, como se
mostra na figura 2. Esta força causa nos corpos um
movimento com uma aceleração que é a aceleração da
gravidade. Por isso definimos o peso pela expressão
=
=−
onde
é o módulo da aceleração da gravidade.
3.2 A reacção normal
Trata-se de uma força de contacto que existe sempre que um corpo se encontra
assente sobre uma superfície, ou quando se desloca sobre ela. Nestas circunstâncias,
havendo contacto, o corpo exerce sempre uma força sobre a superfície, uma
“pressão”, e a superfície reage com uma força que é a reacção normal. Esta força é
sempre perpendicular à superfície de contacto e apontando para fora da superfície, e
daí o seu nome de “normal” no sentido de perpendicular, como se mostra na figura 3.
O valor da força depende das restantes forças aplicadas, uma vez que é uma força de
“reacção”.
Cap.3-5
!""#
Quando um corpo está em contacto com uma superfície, o seu movimento só se pode
realizar paralelamente a essa superfície. Por isso, o sistema de eixos mais adequado
a estudar os movimentos de corpos com superfícies é o indicado na figura 3. Neste
sistema de eixos (t) representa a direcção tangencial e (n) representa a direcção
normal ao movimento. Como o movimento se confina apenas à direcção tangencial
então a componente normal da aceleração deve ser nula e por consequência (2ª lei
de Newton) também a componente normal da resultante de todas as forças deve ser
nula,
=
=
Isto significa que a reacção normal é aquela força que a superfície exerce sobre o
corpo para o obrigar a deslocar-se paralelamente à superfície. Neste sentido podemos
dizer que a reacção normal é uma força de ligação, pois ela restringe o movimento
dos corpos.
Exemplo 1: A queda por um plano inclinado sem atrito
Consideremos um bloco de gelo de massa que desliza,
sem atrito, por um plano inclinado, com uma inclinação α.
Nesta situação, apenas duas forças actuam sobre o
corpo, o peso, vertical, e a reacção normal, perpendicular
ao plano. Como resultado desta acção, o corpo desliza
pelo plano com uma aceleração tangencial ao plano. A 2ª
lei de Newton escreve-se na sua forma vectorial como
+ =
Para determinar o valor da aceleração com que cai o
bloco de gelo devemos resolver esta equação. Para isso
usamos o sistema de eixos indicado na figura e escrevemos cada um dos vectores
nesse sistema de eixos
=
=
Para o peso devemos efectuar a sua projecção segundo cada um dos eixos e notar o
ângulo do triângulo rectângulo que é igual a α (assinalado na figura). A componente
tangencial do peso, também designada por componente eficaz do peso, é o cateto
oposto do triângulo rectângulo e por isso o seu valor será positivo (mesmo sentido do
eixo) e igual à hipotenusa vezes o seno do ângulo. A componente normal do peso é
negativa (sentido negativo do eixo) e sendo o cateto adjacente, o seu valor é igual à
hipotenusa vezes o cosseno do ângulo
=
=
α −
α
Usando esta representação dos vectores em termos das suas componentes
escalares, podemos traduzir a 2ª lei de Newton vectorial num sistema de duas
equações escalares
=
α=
α
+ =
→
−
α=
=
α
Concluímos que a aceleração de um corpo que desce um plano inclinado sem atrito
vale
α
Cap.3-6
!""#
3.3 A força de atrito
Quando empurramos um móvel, ele inicialmente não se move e resiste à nossa
acção. Aumentando o nosso esforço conseguimos vencer essa resistência e depois é
possível deslocar o móvel, mas exercendo sempre uma força, pois há outra força de
resistência, menor a vencer. Esta força de resistência que se manifesta quando duas
superfícies deslizam uma sobre a outra ou se pretendem deslizar duas superfícies, é a
força de atrito.
Se as superfícies não deslizam, a força de resistência ao movimento é o atrito
. Quando existe deslizamento entre as superfícies, temos atrito dinâmico
estático,
ou atrito cinético,
.
Quando aplicamos uma força tangencial a um
objecto e ele não se desloca é porque esta força é
exactamente contrariada pela força do atrito estático,
como se mostra na figura 5
=−
O atrito estático tem sempre uma direcção tangencial
à superfície e o seu sentido é contrário ao da
tendência de deslizamento entre as superfícies.
Como sabemos por experiência própria, a força de atrito estático tem um limite a partir
do qual se dá o deslizamento. Sabemos que o atrito estático máximo é directamente
proporcional à força de contacto que se exerce (perpendicularmente) entre as
superfícies, a reacção normal, e depende do material que constitui essas superfícies,
assim como do grau de polimento das mesmas, é a lei do atrito estático máximo
=
−
A constante de proporcionalidade,
, é o coeficiente de atrito estático, que
depende das superfícies em contacto. Trata-se de um número sem dimensões.
O atrito cinético existe sempre que há deslizamento entre as superfícies. Mostra-se
que, em primeira aproximação, este atrito não depende da velocidade, mas apenas da
força de contacto que se exerce entre as superfícies, a reacção normal, e do material
que constitui essas superfícies, é a lei do atrito cinético
=
A constante de proporcionalidade, , é o coeficiente de atrito cinético, um número
sem dimensões que é função do tipo de superfícies em contacto.
Da experiência que temos a empurrar objectos, sabemos que é mais fácil manter um
corpo em movimento do que dar início ao movimento, isto é, que o atrito cinético é
inferior em módulo ao atrito estático máximo, e por isso tem-se em geral que
<
Cap.3-7
!""#
Exemplo 2: Um plano inclinado com atrito.
Consideremos o plano na figura que pode rodar em torno do eixo E, variando assim a
sua inclinação α . Ao contrário do exemplo 1, sem atrito, o corpo não cai inicialmente
devido à força de atrito estático que contraria a
tendência de queda do corpo. Aumentando a
inclinação do plano atinge-se um ponto limite
em que se dá o deslizamento. Este ponto limite
ocorre quando o atrito atinge o seu valor
máximo. Para determinarmos qual a relação
que existe entre o ângulo limite e o valor do
coeficiente de atrito estático, vamos resolver a
2ª lei de Newton para a situação que ocorre
imediatamente antes do deslizamento
+ + − =
Trata-se de uma situação de equilíbrio estático. Devemos recordar a lei do atrito
estático máximo
=
−
e que a força de atrito se escreve no sistema de eixos da figura como
=− −
−
Reunindo esta expressão com as expressões do exemplo 1 para o peso e reacção
normal, válidas também neste caso, podemos escrever o sistema de equações
escalares para o equilíbrio do corpo imediatamente antes do deslizamento
α− − =
α=
{
−
α=
α=
α
=
α
=
−
Obtém-se finalmente a relação
α=
Uma relação que permite obter de forma experimental simples o coeficiente de atrito
entre duas superfícies quaisquer.
Uma vez iniciado o deslizamento, o corpo terá uma aceleração tangencial, como no
exemplo 1, sujeita à acção de 3 forças, o peso, a reacção normal e o atrito cinético
+ + =
Usando a decomposição dos vectores feita anteriormente, e recordando a lei do atrito
cinético, podemos escrever
α− =
α−
=
−
α=
→
=
α−
α
=
α
=
Podemos comparar este resultado com a aceleração sem atrito, que valia
Cap.3-8
=
α .
!""#
3.4 A tensão em fios, a roldana e corpos ligados
Em muitas situações reais ou em
modelos de situações reais somos
obrigados a considerar corpos ligados
por fios. Como se mostra na figura 7, um
fio para se manter esticado tem de estar
e
. As
a ser actuado por duas forças nas duas extremidades, as tensões
propriedades destas tensões dependem das características do fio. Nas aplicações
que iremos estudar, vamos considerar os fios como ideais.
1) Um fio ideal é inextensível. Esta propriedade significa que podemos desprezar
a deformação linear do fio quando estudamos o movimento de corpos ligados
por fios. Por isso, os deslocamentos (e as velocidades e acelerações) nas duas
extremidades do fio serão idênticos
2) Um fio ideal deforma-se facilmente com uma força qualquer não tangencial.
Esta propriedade tem como consequência que as únicas forças que podem
manter um fio esticado são forças tangenciais, ao longo da direcção do fio
esticado. As tensões nos fios ideais sãos sempre forças com a direcção do fio
esticado.
3) O fio ideal não tem massa. Para sabermos as consequências desta
propriedade, devemos considerar a situação da figura 7 que obedece às
propriedades anteriores. Escrevendo a 2ª lei de Newton para o fio, teremos
+ =
=
+ =
→
=−
isto é, as tensões aplicadas nas extremidades de um fio são iguais em módulo
e simétricas.
Quando um corpo está ligado por um fio, o que nos
interessa estudar é o movimento e a dinâmica do
corpo e não a dinâmica do fio, que foi apresentada
nos parágrafos anteriores. No entanto, sabendo a
3ª lei de Newton, a lei da acção e reacção, se
sabemos quais as forças que mantêm o fio
esticado, então o fio deve exercer sobre o corpo
ligado uma força exactamente simétrica. Essa
reacção do fio esticado sobre o corpo designa-se
também por tensão do fio, mas está aplicada no
corpo e não no fio, como se mostra na figura 8. Podemos assim concluir que corpos
ligados por fios ideais esticados sofrem sempre a acção de uma força de tensão que
tem a direcção do fio esticado e o sentido aponta para o fio esticado. As tensões que
o fio exerce sobre corpos nas duas extremidades são iguais em módulo.
Exemplo 3: Um corpo suspenso por um fio.
Um pêndulo é simplesmente um corpo suspenso por um fio preso a um suporte.
Quando ele é deixado em repouso o fio toma a direcção do peso mostrando a
direcção da vertical (eixo YY da figura). Se abandonarmos o corpo de um ponto
afastado da vertical, o pêndulo irá oscilar segundo uma trajectória circular (a tracejado
na figura). Para manter o pêndulo em equilíbrio num ponto diferente da vertical é
necessário exercer uma força, a força da figura. Para calcular o valor dessa força
Cap.3-9
!""#
em função do ângulo de desvio do pêndulo da
vertical, devemos considerar a equação do
equilíbrio entre as forças aplicadas, peso, força e
tensão no fio
+ + =
Para traduzir esta equação vectorial num
sistema de equações escalares, consideramos o
sistema de eixos indicado na figura e a
decomposição da tensão
=
α +
α
Podemos assim escrever
−
−
+
+
α=
α=
=
=
α
=
α
α
α
Como vimos através deste exemplo, um corpo suspenso por um fio não pode ter um
movimento qualquer. O fio restringe esse movimento, obrigando o corpo a ter uma
trajectória circular. Por isso, uma vez que a tensão no fio é a força que exerce essa
restrição, também podemos considerar a força de tensão em fios como uma força de
ligação.
Como iremos ver, certos modelos físicos
requerem que a direcção de aplicação das
forças de tensão seja modificada pela acção de
uma roldana, como se mostra na figura 10.
Neste casos devemos usar as propriedades de
uma roldana ideal, para a qual o atrito é nulo,
isto é, o módulo das tensões não é alterado pela
acção da roldana, apenas o seu sentido. Podemos assim dizer que as tensões
aplicadas nas extremidades de fios ideais deformados por uma roldana ideal têm
exactamente o mesmo módulo
=
=
Exemplo 4: O modelo de uma placa em subducção.
A figura 11 à esquerda mostra um esquema de uma zona de subducção onde a placa
A choca com a placa B e mergulha sob ela. A placa A está sujeita a várias forças,
como sejam as forças de resistência na região de colisão e o atrito no manto. A
principal força motora para fazer cair a placa A no manto é o seu próprio peso, a
litosfera oceânica é mais densa que o manto subjacente. A figura 11 à direita mostra
Cap.3-10
!""#
um modelo físico muito simples desta
situação, representando a dinâmica apenas
da placa A. A placa A está reduzida a dois
blocos, 1 e 2, de massas idênticas. Ambos os
blocos se deslocam sem atrito e o bloco 2 cai
por um plano inclinado que faz um ângulo α
com a horizontal. O estudo dinâmico desta
situação envolve dois corpos ligados por um
fio esticado cuja direcção é modificada por
uma roldana.
A figura 12a mostra o diagrama das forças
que afectam ambas as massas. Para calcular
a aceleração com que os corpos se deslocam, o procedimento recomendado consiste
em analisar a situação dinâmica de cada corpo individualmente, para de seguida fazer
a ligação entre ambos os corpos, atendendo que em módulo as acelerações são
iguais
=
= =
e também os módulos das tensões são iguais
=
= =
A figura 12b mostra o diagrama de forças apenas para o
corpo 1 e o sistema de eixos tangencial e normal
adequado para a sua resolução. A 2ª lei de Newton
aplicada a esta situação permite escrever
+ + =
Esta equação traduz-se no sistema de equações
escalares
=
−
=
onde já foram usadas as simplificações de índices permitidas pelas identidades
anteriores.
Para o corpo 2, que desce o plano inclinado, o diagrama
de forças encontra-se representado na figura 12c. A 2ª lei
de Newton aplicada a esta situação permite escrever
+
+ =
Esta equação traduz-se num sistema de equações
escalares onde se faz a decomposição habitual do peso
segundo os eixos tangencial e normal
α− =
−
α=
Usando o resultado do corpo 1 podemos escrever para a
equação segundo o eixo tangencial
α−
=
→
=
α
→
=
α
Recordemos que no caso de se ter apenas um bloco a cair pelo plano inclinado a
Cap.3-11
!""#
α . Esta situação sugere que se tivermos um total de n
aceleração seria de =
blocos de massa igual, um a descer o plano inclinado e (n-1) a deslizar
α .
horizontalmente sem atrito, a aceleração seria de =
4. O paradoxo geológico
Estamos neste momento em condições de enunciar um problema que ocorre da
observação dos fenómenos geológicos no terreno e a que podemos designar como
paradoxo geológico. Da observação geológica sabemos que grandes blocos de
rocha têm sofrido deslocamentos horizontais sobre outros blocos de rocha numa
extensão variável que pode atingir várias centenas de quilómetros. Como podem
estes deslocamentos ocorrer contra as forças de atrito? Esta situação está ilustrada
nas pranchas das páginas seguintes.
Se admitirmos que elas ocorrem por deslizamento gravítico, então para um
=
coeficiente de atrito estático moderado,
, a superfície teria de ter uma
, de acordo com os resultados do exemplo 2. Isto significa que
inclinação de
para se ter um movimento horizontal de !! , o desnível vertical deveria ser de
"! , o que é manifestamente impossível (a tangente de valor 0.5 é o quociente
entre o cateto oposto e o cateto adjacente dum triângulo rectângulo). Mesmo um
movimento horizontal de ! exige um desnível vertical de " .
A outra possibilidade é que o movimento seja provocado
por forças tangenciais de origem tectónica. Esta força deve
ser superior ao atrito estático máximo, ou seja, para um
movimento horizontal como o indicado na figura 13,
deveremos verificar as seguintes relações,
+ =
→
=
> −
→
>
→
>
usando o mesmo valor do coeficiente de atrito estático que
anteriormente.
Os estudos efectuados de mecânica das rochas mostram que estas forças tectónicas
adicionais, superiores a metade do peso, são superiores à resistência das rochas,
devendo a sua aplicação levar à destruição das rochas.
Este é o enunciado do paradoxo geológico. Como é que é possível efectuar o
deslocamento de grandes massas de rocha a grandes distâncias sem um desnível
acentuado e sem causar a sua destruição pelas forças aplicadas?
A resposta a este paradoxo encontra-se no comportamento de fluidos que será
apresentado num capítulo posterior.
Cap.3-12
!""#
Prancha –1
Cap.3-13
!""#
Prancha – 2
5. Densidade, porosidade e força de impulsão
5.1 A densidade
Em muitas situações reais, particularmente em Geologia e Geofísica, não é possível
conhecer a massa de um dado corpo ou rocha, no entanto é possível conhecer o seu
volume e o tipo de material que o constitui. A massa, sendo uma propriedade
extensiva, tal como o volume, não é uma característica das rochas. A propriedade
física, intensiva, que é característica das rochas é a densidade.
Cap.3-14
!""#
A densidade de um material ou corpo define-se como sendo a massa por unidade de
volume, isto é, a massa total a dividir pelo seu volume
ρ=
#
É habitual representar a densidade pela letra grega “ró”, ρ. No Sistema Internacional
$
de unidades, a densidade vem expressa em
. Esta é uma unidade pouco
$
habitual nas aplicações práticas, dando-se preferência à unidade
, uma vez que
a água tem uma densidade próxima de nestas unidades. As duas unidades estão
relacionadas por um factor de mil
=
A título de exemplo, a tabela seguinte apresenta as densidades médias e intervalo de
variação para um conjunto de rochas.
Rocha
arenito
argila
calcário
rochas ígneas ácidas
dolomite
rochas metamórficas
rochas ígneas básicas
sal
água
gelo
ar
Densidade média
$
(
)
2.32
2.42
2.54
2.61
2.70
2.74
2.79
2.18
1.00
0.92
-3
1.293×10
Intervalo de variação
$
(
)
1.61 – 2.76
1.77 – 2.45
1.93 – 2.90
2.30 – 3.11
2.36 – 2.90
2.40 – 3.10
2.09 – 3.17
Uma vez conhecida a densidade ρ de um corpo e o seu volume #, então a massa do
corpo obtém-se de forma simples por
= ρ#
Da mesma forma, o peso do corpo pode-se exprimir por
=
=ρ #
5.2 A porosidade
É conhecido que as rochas, sobretudo próximo da
superfície, não se apresentam compactas ou
maciças, apresentando lacunas no seu interior. Estas
lacunas representam vazios devido à formação da
rocha ou à sua alteração, ou podem também ser o
resultado de fracturação. Num volume total da rocha
de #, podemos identificar a parcela que é compacta
como a matriz, # , e uma parcela vazia que
designaremos genericamente por lacunas, #%, (figura
14),
# = # + #%
Cap.3-15
!""#
Define-se a porosidade, &, como sendo a fracção do volume total da rocha que não é
ocupada
#
& = %
#
A porosidade é um número sem dimensões que se exprime habitualmente em %.
Devemos notar que a definição de porosidade permite exprimir o volume da matriz e o
volume das lacunas em função do volume total da rocha
#% = &#
# = # − #% = # − &# = − & #
Uma rocha porosa é um material composto por dois elementos, uma matriz que
poderemos caracterizar pela sua densidade, ρ , e um espaço lacunar preenchido
por um fluido ou por outro material, caracterizado por uma densidade ρ % . Para
determinar a massa da rocha porosa, devemos começar por calcular a massa de cada
um dos componentes
=ρ # =ρ − & #
%
= ρ %#% = ρ % &#
Podemos agora determinar a densidade da rocha porosa usando a definição de
densidade
+ % ρ − & # + ρ % &#
ρ= =
=
→ ρ = ρ% & + ρ − &
#
#
#
Exemplo 5: A densidade de um calcário poroso.
Consideremos um calcário poroso, com uma porosidade de 20%. A matriz tem uma
$
densidade de "'
Vamos calcular a densidade do material composto em duas
situações, quando os vazios estão preenchidos por ar e por água. A densidade do ar
-3
3
vale 1.293×10 g/cm . Usando a expressão anterior, obtemos
ρ =ρ & +ρ − & =
3
Se as lacunas estiverem preenchidas por água, de densidade 1.00 g/cm , usando a
mesma expressão obtemos
ρ =ρ & +ρ − & =
Este exemplo serve para ilustrar como é importante a porosidade e a constituição do
material que preenche o espaço lacunar para a determinação da densidade de uma
rocha.
A metodologia aqui apresentada pode ser também usada para determinar a
densidade de uma rocha composta por diferentes componentes, cada um ocupando
um volume parcial # e cada um com uma densidade ρ . Uma vez que os
componentes preenchem integralmente o volume da rocha, devemos ter
#= #
O equivalente da porosidade designa-se por fracção em volume do componente
#
=
=
=ρ #
#
Cap.3-16
!""#
A densidade da rocha composta vem então dada por
ρ #
ρ=
=
→ ρ=
ρ
#
#
= & e
= − & , e recuperamos
No caso de termos apenas dois componentes,
assim a expressão deduzida anteriormente para uma rocha porosa.
5.3 A força de impulsão
A densidade é uma grandeza importante porque é característica das rochas e controla
o valor da sua massa, conhecido o seu volume. No entanto, a densidade é importante
também porque é a grandeza que controla a acção de um fluido sobre um corpo
mergulhado no seu interior. Esta acção é regida pelo princípio de impulsão de
Arquimedes que iremos aqui aceitar sem demonstração (ficará para um capítulo
posterior).
Segundo o princípio de Arquimedes todo o corpo mergulhado num fluido sofre uma
força vertical, de baixo para cima, igual ao peso do volume de fluido deslocado. Esta
força que traduz a acção do fluido sobre o corpo é designada por força de impulsão.
Pela definição a força de impulsão tem o sentido oposto
ao do peso (figura 15). Para um volume deslocado de
# e um fluido de densidade ρ % , a força de impulsão
vem dada pela expressão
( = ρ% #
Vamos agora discutir diversas situações em que
intervém a força de impulsão.
Corpo completamente mergulhado num fluido
Esta situação encontra-se representada na figura 16.
Apenas duas forças estão a actuar sobre o corpo, o
seu peso e a força de impulsão do fluido (figura 16).
A 2ª lei de Newton permite escrever para esta
situação
+( =
Decompondo os vectores segundo o eixo YY e
usando a densidade do corpo e do fluido temos
−
+( =
− ρ # + ρ% # = ρ #
Conclui-se que a aceleração resultante vale
= ρ% − ρ
Cap.3-17
!""#
Temos assim três situações possíveis:
i) ρ % > ρ
O fluido é mais denso que o corpo. O corpo irá subir com um movimento acelerado,
eventualmente contrariado pela força de atrito no fluido que não foi considerada.
ii) ρ % < ρ
O fluido é menos denso que o corpo. O corpo irá descer com um movimento
acelerado, eventualmente contrariado pela força de atrito no fluido que não foi
considerada.
iii) ρ % = ρ
Quando as densidades do fluido e do corpo são iguais, a aceleração será nula e o
corpo ficará em equilíbrio. É a situação habitual num submarino ou na maioria dos
peixes que dispõe de sistemas para variar a sua densidade para manter a
estabilidade. Os tubarões não dispõem desses sistemas e por isso, sendo mais
densos que a água do mar, são obrigados a nadar constantemente para não irem ao
fundo.
A acção da gravidade e da força de impulsão são essenciais para se compreender a
separação química que resulta da cristalização fraccionada dos minerais. Os minerais
mais densos que o magma depositam-se no fundo enquanto que os menos densos
acumulam-se à superfície.
Corpo que flutua
Neste caso devemos considerar que o volume total do
corpo se compõe de duas parcelas, o volume emerso,
# , e o volume mergulhado ou imerso, # .
Naturalmente que esta situação só pode ocorrer se a
densidade do fluido for superior à densidade do corpo
(ver discussão da situação anterior), ρ % > ρ .
Esta trata-se de uma situação de equilíbrio, a soma
do peso e da impulsão deve ser nula
+( =
Segundo o eixo YY temos a equação escalar
− ρ # + ρ% # =
→ # =
ρ
#
ρ%
Para calcular o volume emerso podemos usar # = # − #
ρ
ρ −ρ
# =# − # = %
#
ρ%
Cap.3-18
ρ%
!""#
Exemplo 6: Um iceberg a flutuar em água doce.
$
Neste caso o fluido tem densidade !!
e o corpo tem a densidade do gelo,
$
. Aplicando a expressão deduzida anteriormente obtemos para o volume
!)
mergulhado
# =
#
→
# =
#
→
# =
#
Quando vemos um iceberg a flutuar, apenas 8% do seu volume é perceptível à
superfície, a maior parte do seu volume está escondido debaixo de água. Daqui
resulta a expressão popular “ver apenas a ponta do iceberg”.
Corpo que não flutua, assente no fundo
Uma vez que o corpo está assente no fundo, temos
uma situação de equilíbrio sob a acção do peso, da
impulsão e da reacção normal no fundo.
Naturalmente que esta situação só pode ocorrer se a
densidade do fluido for inferior à densidade do
corpo, ρ % < ρ . A 2ª lei de Newton aplicada a esta
situação dá a equação vectorial
+( + =
Segundo o eixo YY esta equação de equilíbrio dá
origem à equação escalar
− ρ # + ρ% # + =
Podemos usar esta equação para calcular a
reacção normal no fundo, a que podemos designar
por “peso aparente” pois é aquela força que nos dá
a “sensação de peso” quando mergulhamos numa piscina
= ρ − ρ% #
Se colocarmos uma balança no fundo da piscina, esta seria a força que acusaria.
= ρ # podemos calcular a razão entre o peso
Usando a expressão do peso
aparente e o peso verdadeiro
* = ρ − ρ%
ρ
Exemplo 7: Uma rocha porosa assente no fundo de uma piscina.
3
Seja um calcário de porosidade 20% e com uma matriz de densidade 2.54 g/cm .
Vamos calcular a reacção normal quando um bloco desta rocha está assente no fundo
de uma piscina de água, na situação em que os vazios da rocha estão também
preenchidos por água.
Começamos por determinar a densidade da rocha usando uma expressão deduzida
anteriormente
ρ = ρ% & + − & ρ
Cap.3-19
!""#
A diferença de densidades entre o corpo e o fluido vale então
ρ − ρ% = ρ% & + − & ρ − ρ% = − & ρ − ρ%
e a reacção normal obtém-se como
=
− & ρ − ρ%
#
Tudo se passa como se apenas a parte sólida da rocha porosa estivesse em
contacto com a base da piscina.
Exemplo 8: Pessoa em pé numa piscina, com o corpo parcialmente coberto de água.
Vamos aproximar uma pessoa por um cilindro de altura +! e densidade !)"
$
A piscina tem uma altura de água de 1.40 m. Este modelo encontra-se
representado na figura 19. Pretendemos saber qual é a redução na “sensação de
peso” que se obtém. O conjunto de forças a actuar são exactamente as mesmas da
situação na figura 18, corpo assente no fundo, a que corresponde a seguinte 2ª lei
de Newton
+( + =
A diferença relativamente a esta situação
consiste no facto que neste caso a força de
impulsão é dada por um volume deslocado
inferior ao volume total do corpo
= −ρ #
( = ρ% #
=
Obtemos então uma equação escalar que
podemos resolver em ordem à reacção normal
− ρ # + ρ% # + =
→
= ρ # − ρ %#
Sabendo que o volume de um cilindro é igual à
área da base vezes a altura e que neste modelo
todos os cilindros têm a mesma base
,
podemos escrever
=
ρ , − ρ% ,
=
ρ , − ρ% ,
→
=
ρ , − ρ% ,
ρ ,
= − %
ρ,
ρ ,
Usando os valores deste exemplo, optemos para N/P um valor de 0.133, ous seja, a
sensação de peso é apenas 13% do peso verdadeiro.
Cap.3-20