UNIVERSIDADE FEDERAL DO ABC
Pós-Graduação em Engenharia Elétrica
MICHEL DE MOURA GAVIÃO
ANÁLISE DE MODELAGEM E SIMULAÇÃO ELETROMAGNÉTICA APLICADO
A TESTES DE EMC EM VEÍCULOS
Dissertação de Mestrado
SANTO ANDRÉ – SP
2014
MICHEL DE MOURA GAVIÃO
ANÁLISE DE MODELAGEM E SIMULAÇÃO ELETROMAGNÉTICA APLICADO
A TESTES DE EMC EM VEÍCULOS
Dissertação de Mestrado
Dissertação apresentada ao Curso de Pós-Graduação em
Engenharia Elétrica da Universidade Federal do ABC,
como requisito parcial para obtenção do título de Mestre
em Engenharia Elétrica.
Orientador: Prof. Dr. Alvaro Batista Dietrich
Coorientador: Prof. Dr. Marcelo Bender Perotoni
SANTO ANDRÉ – SP
2014
Este exemplar foi revisado e alterado em relação à versão original, de acordo com
as observações levantadas pela banca no dia da defesa, sob responsabilidade única
do autor e com a anuência de seu orientador.
Santo André, _____ de _________________ de 20_____.
Assinatura do autor: ____________________________________________________
Assinatura do orientador: _______________________________________________
AGRADECIMENTOS
Ao Prof. Dr. Alvaro Batista Dietrich pela oportunidade de realizar este trabalho, além da
orientação, estimulo e condução do mesmo. Agradeço-lhe ainda pela paciência e confiança
durante nossas conversas ao longo do desenvolvimento da pesquisa.
Ao Prof. Dr. Marcelo Bender Perotoni pelo auxilio incondicional principalmente nos
aspectos computacionais intrínsecos a realização deste trabalho e a sua disposição em
compartilhar seus amplos conhecimentos.
Ao Prof. Dr. Edmarcio Antônio Belati pelo auxílio dado na qualificação deste trabalho e
suporte com seus essenciais comentários e recomendações sobre este texto.
Aos Profs. Dr. Carlos Eduardo Capovilla e Dra. Rose Mary de Souza Batalha pelo auxílio
dado na defesa deste trabalho e recomendações que enriqueceram este texto.
Aos colegas Jones Egydio e Daniel Pinheiro Carlesimo pela amizade e apoio durante todo
este período em que compartilhamos as idas e vindas a UFABC.
Aos Srs. Roberto Pereira Ramos, Attila Budavari, Eduardo Almeida e Felipe Vilasboas
pelo incentivo e confiança pela busca do titulo de mestre em engenharia elétrica.
A minha família, em especial a minha esposa Emilene pela motivação e apoio durante o
desenvolvimento deste trabalho, e a minha filha Beatriz, que acabou de nascer, mas iluminou
nossas vidas trazendo muita alegria e felicidade.
Por fim, agradeço a Deus por seu incansável trabalho a favor de nossas vidas.
i
“Somente um principiante que não sabe nada sobre ciência diria que a ciência descarta a
fé. Se você realmente estudar a ciência, ela certamente o levará para mais perto de Deus.”
James Clerk Maxwell
(13 de Junho de 1831 - 5 de Novembro de 1879)
“Se fiz descobertas valiosas, foi mais por ter paciência do que qualquer outro talento.”
Sir Isaac Newton
(04 de Janeiro de 1643 - 31 de Março de 1727)
ii
RESUMO
Este trabalho tem por objetivo descrever uma metodologia para modelagem e
simulação aplicadas a testes de compatibilidade eletromagnética em veículos. São mostrados
os passos para a geração do modelo numérico do veículo e os parâmetros utilizados na
simulação eletromagnética. O programa computacional comercial Computer Simulation
Technology Microwave Studio utiliza a Técnica de Integração Finita para as simulações de
imunidade à radiação do modelo numérico do veículo. Os resultados simulados foram então
confrontados com os testes físicos realizados pelo Instituto Nacional de Pesquisas Espaciais
para a faixa de frequência de 1,5 MHz a 2 GHz. A motivação principal da utilização da
simulação em testes de EMC automotivos é antever a performance de EMC veicular na fase
inicial de projeto, reduzindo assim o tempo de desenvolvimento e reengenharia, e
consequentemente levando a uma redução de custos em protótipos e testes de validação.
Palavras chave: i) Compatibilidade Eletromagnética (EMC); ii) Testes de EMC;
iii) Interferência Eletromagnética (EMI); iv) Modelagem e Simulação Eletromagnética.
iii
ABSTRACT
This work aims to describe a methodology for modeling and simulation applied to
electromagnetic compatibility tests on vehicles. It is shown the steps for generating the
numerical model of the vehicle and the parameters used in electromagnetic simulation. The
commercial software Computer Simulation Technology Microwave Studio uses the Finite
Integration Technique for simulations of radiation immunity of the vehicle numerical model.
The simulated results are later compared with laboratory tests performed by National Institute
for Space Research for the frequency range from 1.5 MHz to 2 GHz. The main motivation for
the use of simulation in vehicular EMC testing is the prediction of the vehicular EMC
performance at an early stage of the project, thereby reducing the development time and reengineering, and consequently leading to a cost reduction in prototype and validation tests.
Keywords: i) Electromagnetic Compatibility (EMC); ii) EMC Tests; iii) Electromagnetic
Interference (EMI); iv) Electromagnetic Modeling and Simulation.
iv
LISTA DE FIGURAS
Figura 2.1 – Acoplamento capacitivo entre dois condutores .................................................... 8
Figura 2.2 – Acoplamento indutivo entre dois condutores ..................................................... 10
Figura 2.3 – Campos em torno de um condutor conduzindo uma corrente ............................ 11
Figura 2.4 – Campos magnéticos em torno de dois condutores .............................................. 12
Figura 2.5 – Componentes de corrente e tensão de EMI de DM e CM .................................. 12
Figura 2.6 – Indutores Choke comumente utilizados ............................................................. 14
Figura 2.7 – Loop de terra entre circuito 1 e circuito 2 .......................................................... 16
Figura 2.8 – Corrente imagem espelhada abaixo do plano
terra criado pelo condutor acima do plano terra .......................................................... 16
Figura 3.1 – Acoplamento de interferências na eletrônica dos veículos ................................. 27
Figura 3.2 – Aparato de teste da ISO 11451-2 ........................................................................ 33
Figura 3.3 – Exemplo de um veículo equipado com uma unidade de tração elétrica ............. 36
Figura 4.1 – Estrutura de desenvolvimento de veículos ......................................................... 37
Figura 4.2 – Câmara semi anecóica do INPE ......................................................................... 46
Figura 4.3 – Direção do campo elétrico irradiado por uma antena stripline .......................... 47
Figura 4.4 – Antena Stripline modelo 5503 da ETS – Lindgren ............................................ 48
Figura 4.5 – Antena Bicônica modelo 3159 da ETS – Lindgren ............................................ 49
Figura 4.6 – Antena DRG Horn modelo 3112 da ETS – Lindgren ........................................ 50
Figura 4.7 – Antenas Horn com abertura retangular .............................................................. 50
Figura 4.8 – Geradores de sinais SML01 à esquerda e SMR40 à direita ............................... 51
Figura 4.9 – Amplificadores 10.000L à esquerda e 2000W à direita ..................................... 51
v
Figura 4.10 – Amplificador AS0102-400 ............................................................................... 52
Figura 4.11 – Sensores de campo elétrico HI-4422 à esquerda e o HI-4455 à direita ............ 52
Figura 4.12 – Medidor de potência NRVD ............................................................................. 53
Figura 4.13 – Sensores de potência URV5-Z2 à esquerda e o NRV-Z15 à direita ................ 53
Figura 4.14 – Tela do software EMC32 da Rohde & Schwarz ............................................... 54
Figura 5.1 – Geometria do modelo do veículo simulado ........................................................ 57
Figura 5.2 – Modelo de simulação do veículo analisado ........................................................ 58
Figura 5.3 – Modelos de simulação das antenas utilizadas ..................................................... 60
Figura 5.4 – Fases do Processo de Modelagem e Simulação .................................................. 61
Figura 5.5 – Diagrama do procedimento de simulação para obter-se
os parâmetros S de um componente passivo ............................................................... 63
Figura 5.6 – Diagrama da Técnica de Integração Finita no Domínio do Tempo ................... 66
Figura 5.7 – Aproximação da geometria do modelo do veículo pelo método staircase ......... 67
Figura 5.8 – Aproximação da geometria do modelo do veículo pelo método PBA ............... 68
Figura 5.9 – Aproximação do modelo de um conector coaxial utilizando tetraedros ............. 69
Figura 5.10 – Porta discreta entre dois pontos utilizada para excitar a antena bicônica ......... 72
Figura 5.11 – Diagrama do circuito equivalente de uma porta discreta do tipo Parâmetro S . 73
Figura 5.12 – Excitação gaussiana para a faixa frequências de 15 MHz a 120 MHz ............. 73
Figura 5.13 – Resultados do parâmetro S11 entre os
métodos MLFMM (solver I) e FIT (solver T) ............................................................ 74
Figura 5.14 – Malha da antena bicônica utilizada no
método MLFMM (solver I) - malha de superfície ...................................................... 74
vi
Figura 5.15 – Malha da antena bicônica utilizada no
método FIT (solver T) – malha hexaédrica ................................................................. 75
Figura 5.16 – Excitação da antena DRG através da porta de guia de onda ............................ 76
Figura 5.17 – Resultados do parâmetro S11 entre os métodos FIT e TLM ............................. 77
Figura 5.18 – Malha da antena DRG utilizada no método FIT ............................................... 78
Figura 5.19 – Malha da antena DRG utilizada no método TLM ............................................ 78
Figura 5.20 – Frentes de ondas de uma onda plana viajando no espaço ................................. 79
Figura 5.21 – Comportamento da frente de onda ao longo do espaço .................................... 79
Figura 5.22 – Utilização da onda plana em substituição a antena stripline ............................ 80
Figura 5.23 – Utilização da onda plana em substituição a antena horn .................................. 81
Figura 5.24 – Condições de contorno em substituição
ao modelo da câmara semi-anecóica ........................................................................... 82
Figura 5.25 – Diferentes classes de materiais atribuídos às partes do veículo ....................... 83
Figura 5.26 – Localização do ponto de medição utilizado no modelo para as simulações ..... 85
Figura 5.27 – Exemplo de malhas hexaédricas e
tetraédricas em um pedaço de cabo coaxial ................................................................ 86
Figura 5.28 – Aproximação da geometria do modelo do veículo pelo método EFPBA ......... 87
Figura 5.29 – Resultados do parâmetro S11 entre diferentes
números de linhas por comprimento de onda (lpco) ................................................... 88
Figura 5.30 – Resultados de convergência do parâmetro S11 para a antena DRG horn ......... 91
Figura 5.31 – Resultados do parâmetro S11 entre a
abordagem PBA e PBA com adaptação automática ................................................... 92
vii
Figura 6.1 – Ambientes de teste e simulação de EMC
para a faixa de frequências de 1,5 MHz a 30 MHz ..................................................... 96
Figura 6.2 – Resultados do comportamento do campo elétrico
na faixa de frequências de 1,5 MHz a 30 MHz ........................................................... 97
Figura 6.3 – Ambientes de teste e simulação de EMC
para a faixa de frequências de 30 MHz a 100 MHz .................................................... 99
Figura 6.4 – Resultados do comportamento do campo elétrico
na faixa de frequências de 30 MHz a 100 MHz ........................................................ 100
Figura 6.5 – Parâmetro S11 e Ganho da antena bicônica simulada ....................................... 101
Figura 6.6 – Ambientes de teste e simulação de EMC
para a faixa de frequências de 100 MHz a 1 GHz ..................................................... 103
Figura 6.7 – Resultados do comportamento do campo elétrico
na faixa de frequências de 100 MHz a 1 GHz ........................................................... 104
Figura 6.8 – Parâmetro S11 e Ganho da antena DRG simulada ............................................ 105
Figura 6.9 – Ambientes de teste e simulação de EMC
para a faixa de frequências de 1 GHz a 2 GHz ......................................................... 107
Figura 6.10 – Resultados do comportamento do campo elétrico
na faixa de frequências de 1 GHz a 2 GHz ............................................................... 108
viii
LISTA DE TABELAS
Tabela 3.1 – Diferenças entre 2004/104/EC e CISPR22 ........................................................ 31
Tabela 4.1 – Classificação das interferências automotivas ..................................................... 39
Tabela 4.2 – Normas equivalentes a SAE J1113 .................................................................... 42
Tabela 4.3 – Normas equivalentes a SAE J551 ...................................................................... 42
Tabela 4.4 – Autoridades institucionais de EMC no Brasil .................................................... 44
Tabela 4.5 – Equipamentos utilizados pelo INPE nos testes de RI ........................................ 45
Tabela 5.1 – Propriedades dos materiais atribuídos às partes do veículo ............................... 84
Tabela 5.2 – Comparativo do tempo de simulação de acordo
com o número de lpco para a antena bicônica ............................................................ 89
Tabela 5.3 – Comparativo do tempo de simulação de acordo
com o número de lpco para a antena DRG .................................................................. 91
Tabela 5.4 – Comparativo entre as abordagens PBA e PBA
com adaptação automática para a antena DRG ........................................................... 93
ix
LISTA DE SIGLAS
Sigla
Descrição
ABC
Absorbing Boundary Condition
AC
Alternating Current
CAD
Computer-Aided Design
CAE
Computer-Aided Engineering
CE
Conducted Emission
CE (selo)
Conformité Européenne
CFL
Courant-Friedrich-Lewy Criterion
CI
Conducted Immunity
CISPR
Comité International Spécial des Perturbation Radioélectriques
CM
Common Mode
CST-MWS
Computer Simulation Technology Microwave Studio
DC
Direct Current
DM
Differential Mode
DRGH
Double Ridged Guide Horn
ECE
Economic Commission for Europe
EEC
European Economic Community
EFPBA
Enhanced Fast Perfect Boundary Approximation
EFT
Electrical Fast Transients
EMC
Electromagnetic Compatibility
EMI
Electromagnetic Interference
EMP
Electromagnetic Pulse
EREV
Extended Range Electric Vehicle
ESD
Electrostatic Discharge
EU
European Union
EUT
Equipment Under Test
EV
Electric Vehicle
EVSE
Electric Vehicle Supply Equipment
E3
Electromagnetic Environmental Effects
FCC
Federal Communications Commission
FDTD
Finite Difference Time Domain
FEM
Finite Element Method
FIT
Finite Integration Technique
x
FPBA
Fast Perfect Boundary Approximation
HEV
Hybrid Electric Vehicle
HF
High Frequency
HIRF
High Intensity Radiated Fields
HV
High Voltage
ICE
Internal Combustion Engine
IEC
International Electrotechnical Commission
IEEE
Institute of Electrical and Electronic Engineers
IGBT
Insulated Gate Bipolar Transistor
ISO
International Organization for Standardization
ITU
International Telecommunication Union
LPCO
Linhas por Comprimento de Onda
MLFMM
Multilevel Fast Multipolar Method
MoM
Method of Moments
PBA
Perfect Boundary Approximation
PCB
Printed Circuit Board
PEC
Perfect Electric Conductor
PHEV
Plug-in Hybrid Electric Vehicle
PML
Perfectly Matched Layer
PWM
Pulse Width Modulation
P-STATIC
Lightning Strikes and Precipitation Static
RADHAZ
Radiation Hazard
RE
Radiated Emission
RF
Radio Frequency
RFI
Radio Frequency Interference
RI
Radiated Immunity
SAE
Society of Automotive Engineers
TC
Technical Committee
TDR
Time Domain Reflectometer
TEM
Transverse Electro-Magnetic
TLM
Transmission Line Matrix
UHF
Ultra High Frequency
UIR
Union Internationale de Radiodiffusion
UWB
Ultrawide-Band
VHF
Very High Frequency
xi
SUMÁRIO
1. INTRODUÇÃO ............................................................................................................ 1
1.1. Descrição do Problema ......................................................................................... 3
1.2. Objetivos ............................................................................................................... 5
2. COMPATIBILIDADE ELETROMAGNÉTICA ......................................................... 7
2.1. Canais de Acoplamento para os Distúrbios ........................................................... 8
2.1.1. Acoplamento Capacitivo ......................................................................... 8
2.1.2. Acoplamento Indutivo ............................................................................. 9
2.1.3. Acoplamento Eletromagnético .............................................................. 11
2.1.4. Modo Comum e Modo Diferencial ....................................................... 12
2.1.5. Radiação de Modo Diferencial .............................................................. 13
2.1.6. Radiação de Modo Comum ................................................................... 13
2.2. Aterramento ......................................................................................................... 15
2.2.1. Plano de Terra ........................................................................................ 15
2.3. Técnicas de Redução de Ruído de Modo Comum ............................................... 17
2.4. Harmonização Internacional ................................................................................ 18
2.4.1. Selo CE .................................................................................................. 19
2.5. Diferentes Fases do Teste de EMC ...................................................................... 20
3. COMPATIBILIDADE ELETROMAGNÉTICA AUTOMOTIVA ........................... 23
3.1. Histórico de EMC Automotivo ............................................................................ 23
3.2. Aspectos de EMC Automotivo ............................................................................ 24
3.2.1. Campos Eletromagnéticos e Eletrônica dos Veículos ........................... 26
3.3. Sistema de Aterramento Automotivo e Baterias .................................................. 27
3.4. Selo ‘e’ Automotivo ............................................................................................. 29
3.4.1. Teste de Emissões Conduzidas .............................................................. 31
3.4.2. Teste de Emissões Irradiadas ................................................................. 32
3.4.3. Teste de Descargas Eletrostáticas .......................................................... 32
3.4.4. Teste de Susceptibilidade a Condução .................................................. 32
3.4.5. Teste de Susceptibilidade a Radiação .................................................... 32
3.4.6. Teste de Susceptibilidade a Radiação em Veículos Completos ............ 33
3.5. EMC em Veículos com Motores Elétricos .......................................................... 34
xii
4. REQUISITOS E METODOLOGIA DE TESTES DE EMC AUTOMOTIVOS ....... 37
4.1. Estrutura de Desenvolvimento de Veículos ......................................................... 37
4.2. Classificação das Interferências Automotivas ..................................................... 38
4.3. Requisitos Gerais para Veículos Automotores .................................................... 39
4.4. Orgãos Aprovadores para o Brasil ....................................................................... 43
4.5. Equipamentos para Testes de RI de EMC Automotivo ....................................... 45
4.5.1. Câmaras Anecóica e Semi-Anecóica ..................................................... 45
4.5.2. Antenas .................................................................................................. 47
4.5.2.1. Antena Stripline ...................................................................... 47
4.5.2.2. Antena Bicônica ...................................................................... 48
4.5.2.3. Antena DRG Horn .................................................................. 49
4.5.2.4. Antena Horn ........................................................................... 50
4.5.3. Gerador de Sinal .................................................................................... 51
4.5.4. Amplificador .......................................................................................... 51
4.5.5. Sensor de Campo Elétrico ..................................................................... 52
4.5.6. Medidor de Potência .............................................................................. 52
4.5.7. Sensor de Potência ................................................................................. 53
4.5.8. Software ................................................................................................. 53
5. MODELAGEM E SIMULAÇÃO DO TESTE DE EMC AUTOMOTIVO ............... 55
5.1. Resolvendo as Equações de Maxwell .................................................................. 55
5.2. Configuração do Modelo ..................................................................................... 56
5.3. Fases do Processo de Modelagem e Simulação ................................................... 61
5.4. Executando a Simulação ...................................................................................... 62
5.5. Domínio do Tempo .............................................................................................. 64
5.5.1. Técnica de Integração Finita no Domínio do Tempo ............................ 65
5.5.2. Aproximação da Geometria em Métodos no Domínio do Tempo ........ 67
5.6. Domínio da Frequência ........................................................................................ 69
5.6.1. MoM-MLFMM ..................................................................................... 70
5.7. Aspectos Importantes da Simulação .................................................................... 70
5.7.1. Modelagem da Realidade ...................................................................... 71
5.7.1.1. Excitação ................................................................................. 71
5.7 1.2. Condições de Contorno ........................................................... 81
5.7.1.3. Propriedades dos Materiais ..................................................... 82
xiii
5.7.1.4. Pontos de Medição .................................................................. 84
5.7.2. Especificando a Malha da Estrutura ...................................................... 86
5.7.3. Acurácia ................................................................................................. 90
5.7.3.1. Adaptação da Malha e Convergência ..................................... 90
5.7.3.2. Quanta Acurácia é Preciso? .................................................... 93
6. RESULTADOS ........................................................................................................... 95
6.1. Resultados do Comportamento do Campo Elétrico
para a Faixa de Frequências de 1,5 MHz a 30 MHz ....................................... 96
6.2. Resultados do Comportamento do Campo Elétrico
para a Faixa de Frequências de 30 MHz A 100 MHz ..................................... 99
6.3. Resultados do Comportamento do Campo Elétrico
para a Faixa de Frequências de 100 MHz A 1000 MHz ............................... 103
6.4. Resultados do Comportamento do Campo Elétrico
para a Faixa de Frequências de 1000 MHz A 2000 MHz ............................. 107
7. CONCLUSÕES ........................................................................................................ 109
REFERÊNCIAS BIBLIOGRÁFICAS ............................................................................ 111
APÊNDICE A – Nearfield and Farfield (Campo Próximo e Distante) .......................... 117
APÊNDICE B – Lista de Frequências ............................................................................ 121
APÊNDICE C – Banda Larga vs Banda Estreita ............................................................ 123
APÊNDICE D – Medições de Pico, Quase-Pico e Média .............................................. 125
xiv
CAPÍTULO 1
INTRODUÇÃO
Áreas tradicionais da engenharia vêm, há décadas, trabalhando na construção de sistemas
de simulação computacional aplicados à problemas específicos de cada uma dessas áreas.
Avanços na tecnologia de simulação e de hardware tornaram possíveis as simulações de
modelos complexos de veículos, havendo softwares dedicados a simulações para análises
térmicas, circuitos elétricos e eletrônicos, esforços mecânicos em estruturas, fluxos de fluidos,
segurança veicular, aerodinâmica, campos eletromagnéticos entre outros [1].
Há muitos fenômenos eletromagnéticos distintos a que um dispositivo eletroeletrônico
pode ser exposto, estes podem ser contínuos, como transmissões de antenas próximas, ou
transitórios, como ruídos introduzidos na rede devido ao chaveamento de dispositivos. De
modo a entender estes fenômenos, uma parte da engenharia elétrica conhecida como
compatibilidade eletromagnética (EMC) lida com o projeto de sistemas eletroeletrônicos de
forma que o acoplamento indesejado de sinais de um sistema a outro não cause uma resposta
incorreta ou indesejada daquele sistema [2].
O termo interferência eletromagnética (EMI) refere-se a qualquer emissão ou sinal,
irradiado no espaço livre ou conduzido por cabos, que coloca em risco o funcionamento de
um dispositivo, ou degrada, obstrui e/ou interrompe seriamente e de forma repetida qualquer
transferência de dados ou energia entre dispositivos. Já o termo EMC refere-se à capacidade
que um dispositivo tem de funcionar adequadamente em seu ambiente eletromagnético sem
sofrer ou causar degradação inaceitável ao sinal desejado devido ao EMI [3].
EMC tornou-se o item mais crítico no desenvolvimento e validação elétrica automotiva,
que se intensificam ao considerarmos os novos powertrains e balanços energéticos
introduzidos recentemente pela indústria automotiva no mercado mundial, os chamados
veículos de propulsões híbridas e elétricas (HEV/EV), que a partir de uma nova arquitetura
eletroeletrônica e da aplicação de um sistema de potência em alta tensão (em substituição ao
tradicional sistema de 12 V), conversores AC/DC, motores elétricos e baterias de íon lítio,
criaram um complexo processo de integração veicular. Tratar este novo sistema de propulsão
elétrica, ou os seus componentes, de forma convencional, em termos de procedimentos de
-1-
testes e limites de emissão eletromagnética, certamente trará problemas de EMC de difícil
solução [4].
Os sistemas eletrônicos podem ser suscetíveis a danos devido aos efeitos ambientais
eletromagnéticos (E3) que podem surgir a partir de uma variedade de fontes ambientais
naturais ou provocadas pelo homem. Essas fontes podem incluir: pulsos eletromagnéticos
(EMP), interferência de radio frequência (RFI), campos de radiação de alta intensidade
(HIRF), EMI, descargas eletrostáticas (ESD), raios e precipitações estáticas (P-STATIC).
Outras preocupações incluem os perigos da radiação eletromagnética (RADHAZ) em pessoas,
material militar e materiais voláteis. Aplicações E3 frequentemente envolvem estruturas
eletricamente grandes (aviões, navios, veículos terrestres) que contêm diversos detalhes
críticos (emendas metálicas, cabos, etc.) [5].
Os dispositivos eletroeletrônicos devem passar por testes de EMC padronizados, que são
regulamentados por comissões e comitês internacionais, onde objetiva-se o desenvolvimento
de sistemas e componentes elétricos que operem satisfatoriamente em seu ambiente
eletromagnético, sem influenciar os dispositivos que o cercam ou ser influenciado por estes.
Durante o teste, o desempenho do produto é monitorado para determinar se o distúrbio
introduzido provoca a degradação da performance, dependendo do teste a ser efetuado e do
tipo do produto a ser testado, o nível de degradação permissível varia. Esta permissão varia de
nenhuma degradação até a degradação completa de tal modo que a intervenção do usuário
seja requerida para retornar o dispositivo a sua funcionalidade [6].
Os procedimentos para a avaliação eletromagnética estática do veículo completo
demandam dois turnos de 8 horas de trabalho cada, custando em média R$10.000,00 por
turno, totalizando um custo médio de R$20.000,00 por modelo de veículo, sem levar em
consideração os custos logísticos que envolvem o transporte do veículo ao centro de teste e
seu retorno ao centro de desenvolvimento, além do custo da construção do protótipo em si
ficando em torno de $500.000,00 (cerca de R$1.165.000,00 nos dias atuais) para um veículo
completo. Considerando que vários ciclos de testes podem ser necessários, um montante
expressivo de recursos deve ser reservado no projeto somente para este tipo de teste e
validação. Licenças anuais de softwares de simulação custam significativamente menos que o
montante reservado a testes físicos e são uma ótima opção de custo benefício no que tange a
otimização do produto e flexibilidade de uso [7].
-2-
Diante de inúmeras variáveis, muitas vezes não controláveis, a simulação eletromagnética
pode ajudar a assegurar o cumprimento dos requisitos já na fase inicial de desenvolvimento.
Assim, antever a performance veicular de EMI/EMC/E3 através da modelagem e simulação
eletromagnética permitirá uma redução significativa de tempo de desenvolvimento e um
consequente corte de custos em protótipos e testes de validação na indústria automobilística.
1.1. DESCRIÇÃO DO PROBLEMA
Os produtos devem atender legalmente às normas internacionais de EMC que foram
desenvolvidas para controlar a emissão eletromagnética por condução e radiação de sistemas
eletroeletrônicos. Estes também não devem ser susceptíveis a interferências eletromagnéticas
como descargas eletrostáticas ou transientes elétricos rápidos (EFT). Além disso, podem ser
exigidos que operem em ambientes eletromagnéticos severos, tais como em ocorrência de
raios, bem como resistirem a ameaças externas como pulsos eletromagnéticos [5]. Esta ênfase
nos requisitos de EMC para sistemas e componentes eletroeletrônicos automotivos requereu o
desenvolvimento de procedimentos e especificações de teste de EMC que têm sido
amplamente empregados na indústria automotiva desde o início da década de 1970 [3].
Considerando o cenário dos veículos movidos com motores de combustão interna (ICE),
as principais fontes de radiação eletromagnética são as centelhas do sistema de ignição e os
motores elétricos, por exemplo, acionadores dos vidros ou limpador de para-brisas. Durante a
ignição e partida do veículo, um pulso com alta tensão, tipicamente em torno de 20 kV a
40 kV, é aplicado desde os pontos de distribuição até as velas de ignição e,
consequentemente, ocorre a ionização das moléculas de ar adjacentes gerando a emissão de
um sinal de interferência pulsado tendo um espectro na faixa de 10 kHz até cerca de 7 GHz.
Os níveis de emissão variam de acordo com a arquitetura dos sistemas e do tipo do veículo.
Estas emissões afetam comunicações HF, VHF e UHF, radares e o próprio funcionamento do
sistema eletrônico dos veículos que é usado para controlar suas operações essenciais. Para
qualquer veículo sem filtros anti-emissões, a intensidade máxima do campo elétrico emitido
interferindo no ambiente é tipicamente 90 dBµV/m medido a 2 metros de distância a partir do
veículo [3]. A susceptibilidade eletromagnética dos módulos eletrônicos a bordo do veículo
também é um fator muito importante a ser considerado. O termo susceptibilidade ou
imunidade está relacionado ao quão robusto o produto funciona em seu ambiente alvo sem ser
perturbado, efeito este que muitas vezes somente é tardiamente percebido devido aos danos
-3-
que são causados aos dispositivos embarcados. Os problemas de imunidade eletromagnética
ocorrem quando dispositivos eletrônicos integrados em seu ambiente operacional sofrem a
ação de correntes induzidas por acoplamento crosstalk ou devido às correntes de modo
comum circulando em seus cabos de conexão. Como praticamente todas as funções do
veículo, desde o travamento de portas até o controle do motor, são controladas eletricamente,
o rigor dos requisitos de segurança é proporcionalmente aumentado com o acréscimo do uso
da eletrônica embarcada.
No caso do competitivo mercado de veículos híbridos e elétricos, os engenheiros são
constantemente desafiados a aumentar a eficiência, estabilidade e confiabilidade do sistema,
sempre com curtos prazos de projeto. Neste contexto, os conversores de potência
desempenham um papel crítico no sistema de propulsão e arquitetura veicular. Tipicamente
compostos por transistores bipolares de porta isolada (IGBT), estes dispositivos chaveiam
centenas de amperes de corrente elétrica muito rapidamente para fornecer energia em corrente
alternada para o motor, controles eletrônicos e outros sistemas. As frequências de
chaveamento do IGBT podem variar de dezenas a centenas de kHz, com tempos de subida e
descida do sinal da ordem de 50 a 100 ns. A velocidade de comutação rápida desses
dispositivos torna o IGBT extremamente eficaz em conversores de potência, mas essa
velocidade de comutação é também a fonte de dois grandes problemas eletromagnéticos: 1)
Emissões por condução (através de estruturas condutoras de corrente) são geralmente menores
que 30 MHz e podem causar problemas de integridade de sinal ou criar ondas refletidas de
energia que podem potencialmente danificar o conversor e o motor; 2) Campos
eletromagnéticos irradiados (através do ar) são geralmente maiores que 30 MHz e podem
afetar os sistemas eletrônicos do veículo [8].
Ambos os tipos de problemas de interferência devem ser considerados tanto pelos
requisitos legais governamentais quanto pelas normas internacionais automotivas de EMC,
assim engenheiros responsáveis por componentes eletroeletrônicos são capazes de
desenvolver seus produtos atendendo aos requisitos de EMI/EMC/E3 dentro da arquitetura
veicular. Isto somente pode ser feito entendendo e resolvendo os fundamentos físicos que
governam o comportamento eletromagnético e estendendo as soluções encontradas buscando
a integração veicular e interação com o ambiente. Esta abordagem de simulação direcionada
tem a vantagem de agregar outras questões eletromagnéticas que também devem ser levadas
em consideração, como a qualidade da corrente elétrica, a dissipação de energia e a eficiência
do sistema em geral.
-4-
Atender às normas de emissão e susceptibilidade de dispositivos eletroeletrônicos
embarcados tornou-se um dos maiores desafios para a modelagem e simulação elétrica
automotiva [3]. Tipicamente, a realização desses cálculos utilizando elementos de circuitos
lineares ou soluções de circuitos simples requer numerosas aproximações grosseiras e
suposições excessivamente simplificadas, ignorando o passo crucial de simular os
fundamentos físicos. Assim, os resultados não serão representativos e diversos ciclos de testes
e reengenharia utilizando-se protótipos podem ser necessários antes que o desempenho
satisfatório do produto seja alcançado. Na maioria dos casos, estes ciclos de testes não podem
ocorrer até o final do processo de desenvolvimento, quando custos de reengenharia podem
aumentar significativamente e atrasos podem levar a perda de oportunidades de mercado.
Antever os efeitos eletromagnéticos nos estágios iniciais de desenvolvimento, antes da
montagem e integração dos subsistemas, é praticamente impossível sem o uso da simulação
numérica eletromagnética [8].
1.2. OBJETIVOS
Esta dissertação tem por objetivos:
Analisar a modelagem e simulação eletromagnética de testes de EMC aplicadas a
veículos automotores, visando à redução de tempo de desenvolvimento e reengenharia, e
assim reduzir custos em protótipos e testes de validação;
Capturar as importantes fontes de emissões conduzidas e irradiadas dos subsistemas
eletroeletrônicos dos veículos, detalhando seus respectivos modos operacionais e
propondo soluções para redução ou até mesmo eliminação total dos ruídos
eletromagnéticos gerados;
Propor melhorias na performance eletromagnética do sistema elétrico de veículos,
evitando que distúrbios provoquem perda de desempenho e mantenha sua funcionalidade
conforme requisitos.
-5-
-6-
CAPÍTULO 2
COMPATIBILIDADE ELETROMAGNÉTICA
A utilização de circuitos eletrônicos no controle dos subsistemas veiculares está
aumentando, exigindo que os diferentes circuitos sejam capazes de operarem em estreita
proximidade. Isto implica que a interferência eletromagnética irá se tornar um grande
problema no projeto dos circuitos. A preocupação com a EMI se intensifica à medida que os
circuitos se tornam menores, o que significa que mais circuitos serão aglomerados em um
menor espaço, o que aumenta a probabilidade de interferência [9].
O responsável pelo projeto do circuito eletrônico deve assegurar que o sistema também
funcione corretamente quando houver outros equipamentos eletrônicos nas proximidades, e
não apenas nas condições ideais em laboratório. É importante que as fontes de ruído externas
não afetem o sistema e que este próprio não seja uma fonte de ruído para o ambiente. Isto é
chamado de compatibilidade eletromagnética e cada vez mais se torna um aspecto essencial a
ser considerado na parte inicial do desenvolvimento do produto.
O IEEE definiu o conceito de EMC da seguinte forma [10]:
"Compatibilidade Eletromagnética, EMC, é a capacidade de um dispositivo, equipamento
ou sistema de funcionar satisfatoriamente em seu ambiente eletromagnético sem introduzir
distúrbios eletromagnéticos intoleráveis em qualquer ponto neste ambiente.”
Para se definir um problema de ruído eletromagnético, três itens são necessários, isto é,
uma fonte de ruído, um canal de acoplamento e um receptor sensível. Um componente
atuando como fonte de ruído em determinado momento pode também ser receptor em um
momento próximo implicando que EMC possui dois aspectos, emissão e susceptibilidade [9].
Há diferentes caminhos para que as emissões sejam acopladas a outros sistemas, e existem
muitas técnicas pelas quais o ruído pode ser reduzido em um sistema eletroeletrônico. Isto
implica que não existe uma solução única para a maioria dos problemas de redução de ruído,
devendo ser analisada caso a caso.
-7-
2.1. CANAIS DE ACOPLAMENTO PARA OS DISTÚRBIOS
2.1.1. Acoplamento Capacitivo
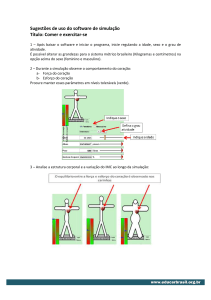
O acoplamento capacitivo, também conhecido como acoplamento elétrico, é o resultado
da interação do campo elétrico entre os circuitos. Se dois condutores são colocados lado a
lado um ao outro, haverá uma capacitância parasita entre estes. A Figura 2.1 mostra um
exemplo deste fenômeno e seu respectivo circuito equivalente.
Figura 2.1 – Acoplamento capacitivo entre dois condutores [11]
A Capacitância C12 na Figura 2.1 representa a capacitância parasita entre os dois
condutores. Os capacitores C1G e C2G representam as capacitâncias totais entre cada condutor
e o terra. A resistência R é a resistência do condutor 2 ao terra, e é o resultado do circuito
ligado a este condutor. A tensão V1 representa a fonte de interferência, e o circuito 2, o
receptor. A tensão de ruído VN recebida pelo condutor 2 pode ser expressa como [9]:
[
]
(
(
)
)
Em casos práticos, a resistência R representa uma impedância muito menor do que a
impedância da capacitância parasita (C12 + C2G). Logo a Equação 2.1 pode ser reduzida como
segue:
(
-8-
)
Estas equações mostram claramente como a tensão do ruído no condutor 2 depende de
vários parâmetros. Pode ser visto na Equação 2.2 que a tensão do ruído é diretamente
proporcional à frequência da fonte de ruído, a resistência R do circuito afetado ao terra, a
capacitância parasita entre os circuitos e a magnitude da tensão da fonte. Em muitos casos,
não é possível alterar a tensão ou a frequência da fonte de ruído, deixando apenas dois
parâmetros para que se possa reduzir o acoplamento capacitivo. Para diminuir a resistência R
é necessário que o circuito de recepção funcione com um nível menor de resistência. Em
muitos casos é mais fácil diminuir o valor da capacitância parasita desde que esta seja afetada
pela orientação dos condutores e da blindagem. Se os condutores são afastados, a capacitância
parasita irá diminuir. No entanto, apenas pouca atenuação adicional será ganha pelo
espaçamento entre os condutores por uma distância maior que 40 vezes o seu diâmetro, de
acordo com a Equação 2.3:
(
)
( )
onde D é a distância entre os cabos e d o diâmetro do cabo [9].
Outra maneira de alterar a capacitância parasita é através da blindagem do condutor.
Quando o condutor encontra-se blindado, apenas o comprimento do condutor que se estende
para além da blindagem determina a capacitância parasita, e portanto é importante manter este
comprimento o mais curto possível. Também uma conexão de baixa resistência ou
impedância ao terra para a blindagem é necessária a fim de proporcionar uma robusta
blindagem ao campo elétrico.
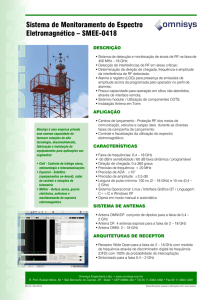
2.1.2. Acoplamento Indutivo
O acoplamento indutivo, também conhecido como acoplamento magnético, é o resultado
da interação entre os campos magnéticos de dois circuitos. Um fluxo magnético é criado
analogamente a um fluxo de corrente em um circuito fechado. O fluxo é determinado pelo
produto da corrente circulante com a indutância do circuito. O valor da indutância é
dependente da geometria do circuito magnético e das propriedades magnéticas do meio que
contém o campo. Um fluxo de corrente em um circuito pode produzir um campo magnético
em outro circuito, e a conexão entre estes dois circuitos é chamada de indutância
mútua, M [9].
-9-
A partir de um campo magnético de densidade de fluxo
ruído VN induzida em um percurso fechado de área
, pode-se deduzir a tensão de
pela lei de Faraday (Equação 2.4) [11]:
∫
onde
e
(
)
são vetores. Para um circuito fechado estacionário com densidade de fluxo
variando senoidalmente, sendo constante ao longo do circuito fechado, tem-se a expressão da
tensão de ruído reduzida a (Equação 2.5):
(
)
onde θ é o ângulo entre a área e a densidade do fluxo magnético. Uma vez que BAcosθ
representa o fluxo total acoplado no circuito receptor, a Equação 2.5 pode ser reescrita como:
(
)
onde I1 é a corrente no circuito fonte e M é a indutância mútua entre o receptor e o circuito
fonte. A representação física e o circuito equivalente correspondentes ao acoplamento
magnético entre dois circuitos são mostrados na Figura 2.2.
Figura 2.2 - Acoplamento indutivo entre dois condutores [11]
Pelas Equações 2.5 e 2.6, o acoplamento entre dois circuitos é diretamente proporcional à
frequência ω (2πf). Os três parâmetros que estão aptos a modificações de forma a reduzir a
- 10 -
tensão de ruído são a densidade do fluxo magnético B, a área do circuito fechado A, e o
ângulo θ entre A e B. A densidade do fluxo magnético pode ser reduzida por separação física
dos circuitos ou torção dos cabos da fonte emissora de ruído (exemplo prático dos cabos com
pares trançados). A torção dos cabos causa o cancelamento dos campos magnéticos a partir
destes, mas também pode ser utilizado para diminuir a área do circuito receptor. Se a corrente
do circuito receptor em vez de retornar for conduzida através de um plano de terra, colocar o
condutor próximo ao plano de terra pode diminuir a área. A apropriada orientação dos
circuitos da fonte emissora de ruído e do receptor pode reduzir o termo cosθ reduzindo o
ruído induzido [9].
2.1.3. Acoplamento Eletromagnético
Acoplamento eletromagnético ou radiação é uma combinação de campos elétricos e
magnéticos, e é um termo normalmente utilizado em farfield (campos distantes). Para as
definições de nearfield e farfield consultar o Apêndice A [9].
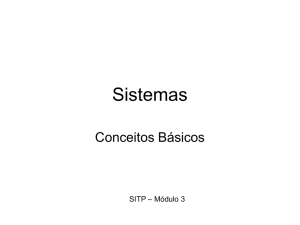
Uma forma eficaz de prevenir que a radiação atinja os circuitos próximos é blindar as
fontes de interferência. Conforme a Figura 2.3, uma blindagem que é aterrada em uma das
extremidades irá somente afetar o campo elétrico em torno do condutor. A fim de ser capaz de
afetar tanto o campo elétrico quanto o magnético em torno do condutor, uma blindagem que
conduza uma corrente igual e no sentido oposto ao da corrente no condutor se faz necessária.
Figura 2.3 – Campos em torno de um condutor conduzindo uma corrente [11].
Na Figura 2.3, a figura a esquerda descreve um condutor sem blindagem, a figura no meio
descreve um condutor blindado onde a blindagem está aterrada em apenas uma extremidade, e
a figura mais à direita descreve um condutor blindado onde a blindagem é aterrada e conduz
uma corrente igual à corrente do condutor, mas no sentido oposto.
- 11 -
Os campos magnéticos ao redor de dois condutores que são colocados próximos com
correntes iguais de sinais opostos se anulam mutuamente de acordo com a Figura 2.4.
Figura 2.4 - Campos magnéticos em torno de dois condutores. Conduzindo correntes iguais em sentidos opostos
cancelam-se quando os condutores são colocados próximos uns aos outros [11]
2.1.4. Modo Comum e Modo Diferencial
Perturbações ou distúrbios eletromagnéticos aparecem na forma de ruídos em modo
comum (CM) ou no modo diferencial (DM). O componente de tensão do DM de um circuito é
a tensão que pode ser medida entre as fases dos condutores. O componente de corrente do DM
flui nos cabos de potência. O componente de corrente de CM, por outro lado, flui dos
condutores de fase e neutro em direção ao terra. O circuito para a corrente de modo comum é
fechado por capacitâncias parasitas entre as partes aterradas e o circuito. As definições para os
componentes DM e CM podem ser vistas na Figura 2.5 (à esquerda, uma típica fonte de
interferência eletromagnética, e a direita, o circuito de alta frequência equivalente da fonte de
interferência eletromagnética) e na Equação 2.7 [12].
Figura 2.5 – Componentes de corrente e tensão de EMI de DM e CM. [12]
- 12 -
(
)
{
A radiação a partir de um circuito eletrônico pode ocorrer tanto em modo comum quanto
em modo diferencial.
2.1.5. Radiação de Modo Diferencial
Uma corrente que circula em um circuito fechado (loop) formado pelos condutores deste
circuito causa radiação de modo diferencial. Estes pequenos loops de corrente irão agir como
pequenas antenas, irradiando um campo magnético. A corrente neste loop está em fase em
todos os lugares, o que aumenta ao invés de diminuir a emissão geral do circuito, diminuir a
emissão pode acontecer quando a área do loop for maior. A radiação a partir do loop da
antena é proporcional à corrente no loop, a área do loop e ao quadrado da frequência. Se a
magnitude e a frequência ou o conteúdo harmônico da corrente for reduzida, a radiação
também irá reduzir. Minimizar a área que delimitada pelo fluxo de corrente também irá
reduzir a radiação, e isso pode ser feito colocando-se os condutores de sinal e seus respectivos
circuitos de retorno próximos uns ao outros [9].
2.1.6. Radiação de Modo Comum
A radiação de modo comum tem uma grande influência na performance de emissões de
um produto, e é mais difícil de controlar do que a radiação de modo diferencial [9]. Enquanto
a radiação DM é controlada por uma disposição adequada dos circuitos, o controle da
radiação de CM exige que as correntes CM em todos os cabos sejam minimizadas.
A radiação CM origina-se a partir dos cabos do sistema. As frequências que são irradiadas
diferem das frequências do sinal DM no cabo e são determinadas pelo potencial CM (tensão
referenciado ao terra). A radiação CM é proporcional à frequência, ao comprimento da antena
(do cabo) e à magnitude da corrente CM na antena. Para frequências mais baixas de uma onda
quadrada simétrica, por exemplo, o espectro de emissão CM é plano, isto é, o ganho é
constante para toda a faixa frequências. O espectro é plano até certa frequência, proporcional
- 13 -
ao tempo de subida do sinal (1/π⋅TRISE), onde o espectro começa a diminuir. Isto implicaria
que as emissões CM são na sua maioria um problema nas faixas de frequências mais baixas, o
que não é totalmente verdade uma vez que o acoplamento capacitivo aumenta
proporcionalmente com o aumento da frequência do ruído [9].
A corrente CM é muitas vezes o único parâmetro controlável e é, portanto, um importante
parâmetro de controle para as emissões de radiação. A corrente CM não é requerida para a
operação do sistema, mas é importante assegurar que os componentes usados para a supressão
da corrente CM não afetem as correntes DM funcionais. Uma das primeiras ações a serem
tomadas, a fim de controlar as correntes CM é minimizar a tensão da fonte que alimenta a
antena (o cabo). Outra ação seria minimizar a diferença de potencial entre terras, sendo uma
solução para este problema a utilização de um plano de terra a fim de reduzir a queda de
tensão no sistema de aterramento. Outro ponto positivo da introdução de um plano de terra é
que este também diminui a radiação DM, devido à corrente espelhada induzida [9].
Outra maneira de controlar a corrente CM é inserir uma grande impedância CM em série
com o cabo, conhecido como modo comum Choke, conforme mostra a Figura 2.6, sendo na
prática um indutor de alto valor enrolado em um núcleo de ferrite. O CM Choke é a única
técnica que não requer aterramento para funcionar e também que não afeta a corrente DM.
Desacoplar os cabos (desvio da corrente para o terra) ou blindagem são métodos que também
afetam a corrente CM, mas o problema com esses métodos é que exigem um aterramento
“limpo” para seu adequado funcionamento.
Figura 2.6 – Indutores Choke comumente utilizados[13]
- 14 -
2.2. ATERRAMENTO
Um sistema de aterramento bem projetado pode fornecer proteção contra interferências
indesejadas e emissões sem qualquer custo adicional por unidade em um produto. Um terra é
normalmente definido como um plano equipotencial ou um ponto onde a tensão não se altera
independentemente da corrente aplicada ou extraída deste, um ponto ou plano que serve como
um potencial de referência para um circuito ou sistema. Esta definição não é normalmente
representativa para sistemas de terras práticos uma vez que estes não são equipotenciais.
Outro problema com esta definição é que esta também não salienta a importância do percurso
real feito pela corrente quando esta retorna para a fonte. É fundamental conhecer o percurso
real da corrente a fim de determinar-se a emissão irradiada ou a susceptibilidade de um
componente [11].
Também é importante destacar a frequência do circuito ao projetar o sistema de
aterramento. Em altas frequências e em circuitos digitais, um sistema de aterramento
multiponto pode ser utilizado de modo a minimizar a impedância ao terra. Este tipo de
sistema de aterramento deve ser evitado em baixas frequências. Em um sistema de baixa
frequência, é importante ter-se um sistema de aterramento de ponto único com um mínimo de
três retornos ao terra separados, ou seja, terra do sinal, terra do ruído e terra do hardware.
Uma potencial fonte de ruídos é um loop de terra. Um loop de terra pode, por exemplo,
ser criado quando vários pontos de aterramento estão separados por uma grande distância e
estão ligados ao terra da fonte AC, ver a Figura 2.7. A fim de melhorar esta situação, um dos
terras pode ser removido, assim converte-se o sistema multiponto para um sistema de terra de
ponto único, ou o efeito dos múltiplos terras podem ser eliminados ou pelo menos
minimizados, isolando-se os dois circuitos. O isolamento poderia ser alcançado, por exemplo,
com transformadores, CM Choke, acopladores ópticos ou circuitos balanceadores.
2.2.1. Plano de Terra
Um plano de terra é uma grande área condutiva, que serve como um circuito comum ou
retorno de energia. O plano de terra é muitas vezes colocado em placas de circuito impresso
tornando-a rígida e também provendo dissipação térmica. Um plano de terra também funciona
como uma blindagem de Faraday eletrostática além de reduzir o campo magnético e as
capacitâncias parasitas resultantes através das correntes imagens espelhadas, ver Figura 2.8.
- 15 -
Figura 2.7 – Loop de terra entre circuito 1 e circuito 2 [11]
Figura 2.8 – Corrente imagem espelhada abaixo do plano terra criada pelo condutor acima do plano terra [11]
O plano de terra afeta o campo elétrico e magnético de modo que estes se distribuem
como se existisse uma imagem espelhada do condutor no lado oposto ao plano de terra. Este
condutor imagem, em seguida, conduz uma corrente de mesma amplitude, mas no sentido
oposto.
Aberturas no plano de terra sob os condutores reduzem significativamente sua eficácia. É
sempre melhor ter um plano de terra sólido fino que um plano de terra espesso, porém com
aberturas [11].
- 16 -
2.3. TÉCNICAS DE REDUÇÃO DE RUÍDO DE MODO COMUM
Existem algumas técnicas de redução de ruído de modo comum, que muitas vezes podem
ser utilizadas para se lidar com os problemas de EMI. Algumas destas técnicas não
acrescentam custo adicional e devem ser usadas sempre que aplicável, entretanto outras
técnicas que serão mencionados nesta seção devem ser utilizadas somente quando for
necessária a redução de ruído adicional devido à adição de custo. A seguir são apresentados
alguns exemplos de técnicas de redução ou supressão de ruído cuja explicação teórica
subjacente foi abordada pela maioria das técnicas contidas na Seção 2.1 [9]:
circuitos ruidosos devem sempre ser torcidos em conjunto, uma vez que diminuirá a área
do loop e consequentemente diminuirá o acoplamento magnético;
uma solução ainda melhor seria se os circuitos ruidosos, além de serem torcidos, também
pudessem ser blindados;
limitar os tempos de subida do pulso diminui os componentes de alta frequência do sinal,
diminuindo por consequência tanto o acoplamento capacitivo quanto o indutivo;
também é desejável ter todas as fontes de ruído incluídas num compartimento blindado e
que todos os cabos que saem deste dispositivo sejam filtrados.
Se o chassi é utilizado como um retorno de terra, os cabos devem ser colocados próximos
do chassi, a fim de minimizar o acoplamento indutivo. Todos os cabos de aterramento devem
ser tão curtos quanto possível e terras “sujos” devem ser evitados (terra sujo está relacionado
a pontos de aterramento dentro de um sistema que não estão equipotencializados devido a
impedância comum entre os circuitos, onde loops de corrente indesejados são gerados). O
comprimento dos circuitos sensíveis a ruídos também deve ser mantido tão curto quanto
possível, uma vez que um cabo longo é uma antena receptora mais eficiente. Circuitos que se
estendem além da blindagem do cabo devem ser igualmente curtos para minimizarem o
acoplamento capacitivo. Uma vez que sempre há um acoplamento entre dois circuitos que são
colocados em estreita proximidade, circuitos ruidosos e não ruidosos devem ser separados. É
importante separar os terras de sinais, ruídos e hardware, a fim de minimizar o ruído final
gerado [9].
A compreensão dos problemas de EMI em muitos casos é de difícil entendimento. Isto se
deve, em parte, aos efeitos parasitas que desempenham um papel fundamental causando a
maioria dos problemas de EMI. Via de regra apenas um terço dos componentes que afetam
- 17 -
EMI são conhecidos e constam nos diagramas elétricos de circuitos. Outro terço é constituído
por elementos parasitas internos aos componentes, e o terço final é criado pela disposição das
trilhas na placa de circuito impresso e da orientação, disposição e montagem de seus
componentes. Outro fator que dificulta a solução é que os resultados dos testes são fortemente
afetados por pequenos detalhes, como as diferenças de comprimento dos cabos, arranjos de
cabos, arranjos dos módulos e equipamentos, e assim por diante [9].
2.4. HARMONIZAÇÃO INTERNACIONAL
Em 1934, o Comitê Internacional Especial sobre Interferências Radioelétricas (CISPR) foi
fundado em Paris por representantes de países que se preocuparam com os problemas de
interferência de radiofrequência. Estes concordaram que sua principal tarefa seria a de
documentar os métodos padrão de medições de EMI e determinar os limites aceitáveis
internacionalmente dos níveis de ruído. O CISPR mais tarde tornou-se a primeira organização
autorizada a promulgar recomendações internacionais sobre EMC [14].
Sua conferência de fundação propôs a criação de uma comissão comum na Comissão
Eletrotécnica Internacional (IEC) e União Internacional de Radiodifusão (UIR), para facilitar
a elaboração de recomendações, isto antes da Segunda Guerra Mundial. Depois da Segunda
Guerra Mundial, a UIR não foi recuperada totalmente e o CISPR tornou-se um comitê
especial do IEC. O CISPR difere-se de outros grupos de estudo no sentido de que várias
outras organizações internacionais participam da CISPR trabalhando na posição de
observador. O esforço preliminar do CISPR foi publicar uma série de documentos que
descrevem os requisitos amplamente aplicáveis a equipamentos e técnicas medição de EMI.
Este esforço foi concluído em 1961.
Em 1973, o CISPR foi reorganizado em seis subcomissões, com diferentes áreas de
interesse. As subcomissões são as seguintes [14]:
Subcomissão A: Equipamentos de medição de interferência, métodos de medição (Publ.
16, 17);
Subcomissão B: EMI industrial e de aparelhos médicos e científicos (Publ. 11, 19, 23, 28);
Subcomissão D: Interferência de ignição dos veículos a motor, motores de combustão e
assuntos relacionados (Publ. 12, 21, 25);
- 18 -
Subcomissão F: EMI em eletrodomésticos, lâmpadas fluorescentes e dispositivos
semelhantes (Publ. 14, 15, 30);
Subcomissão H: Limites para a proteção dos serviços de rádio (Publ. 31);
Subcomissão I: EMC de equipamentos de tecnologia da informação, equipamentos de
multimídia e receptores (Publ. 13, 20, 22, 24).
Uma vez que o CISPR trabalha principalmente com frequências de rádio acima de 9 kHz,
a IEC tem uma outra comissão que abrange as outras faixas de frequência. Este comitê é
chamado TC 77 e tem como principal tarefa a de preparar as publicações básicas e genéricas
de EMC especificando ambientes eletromagnéticos, emissões, imunidade, procedimentos de
teste e técnicas de medição. A TC 77 também é dividida em diferentes subcomissões [14]:
Subcomissão 77A: Fenômenos de baixa frequência até, e incluindo, 9 kHz;
Subcomissão 77B: Fenômenos contínuos e transitórios de alta frequência, incluindo
descargas eletrostáticas;
Subcomissão 77C: Transientes de alta potência, tais como os campos eletromagnéticos
produzidos por detonações nucleares de alta magnitude.
As normas e diretrizes que são emitidas pelo CISPR e TC 77 formam a base para os testes
que são realizados quando um produto deve ser submetido ao selo da Comissão Europeia
(CE).
2.4.1. Selo CE
Para se comercializar um produto elétrico dentro da União Europeia (EU) é obrigatório o
uso do selo CE e uma declaração de conformidade. O selo CE é a declaração do fabricante
que informa que o produto está em conformidade com todas as diretivas aplicáveis. A maioria
dos produtos pode ser auto avaliado pelo fabricante para satisfazer os requisitos essenciais. O
selo CE não é, portanto, uma aprovação de certificação ou marca de qualidade, mas apenas
uma declaração de responsabilidade do fornecedor. Os principais objetivos são: indicar a
conformidade de produtos com os requisitos essenciais das diretivas, permitir que os produtos
sejam colocados no mercado, garantir a livre circulação de mercadorias e permitir a retirada
de produtos não conformes. O selo CE trata apenas dos produtos e não dos subcomponentes.
Quando um produto deve ter a marca CE, o fabricante identifica as diretivas de teste que
são aplicáveis ao produto. As diretivas e o tipo de produto definem o procedimento de
- 19 -
avaliação de conformidade que deve ser realizado. Este pode ser uma autodeclaração, que
envolve testes e inspeção, ou uma avaliação do sistema de qualidade de um órgão certificador,
ou uma combinação destes. A documentação técnica criada e a declaração de conformidade
devem estar disponíveis para as autoridades competentes (membros da EU) quando o produto
for aprovado nos testes a fim de receber o selo CE e poder ser vendido [15].
2.5. DIFERENTES FASES DO TESTE DE EMC
É importante lembrar que há diferentes necessidades de testes de EMC durante o ciclo de
vida de um produto, e que cada teste tem seus próprios requisitos técnicos, de custo e tempo.
Mas se o teste de EMC correto for feito em todas as fases de desenvolvimento do produto,
isto pode levar à economia de grande quantidade de tempo e recursos. Uma empresa de
tecnologia provavelmente terá que lidar com todos os quatro tipos de testes de EMC:
diagnóstico, pré-conformidade, total conformidade e produção [16].
Testes de EMC de diagnóstico são realizados quando um produto está em sua fase de
desenvolvimento. Nestes testes, os efeitos de EMC de diferentes projetos são inspecionados.
Uma vantagem destes testes é que estes fornecem ao engenheiro uma base de dados de
conhecimento sobre os efeitos das escolhas dentre as alternativas de projeto. Este
conhecimento pode ser muito útil quando os possíveis efeitos de EMC de modificações pósprojeto necessitam ser avaliados.
Testes de pré-conformidade são realizados quando houver um protótipo disponível que
represente o modelo, que também estará sujeito a testes de total conformidade mais tarde.
Estes testes são importantes, a fim de evitarem surpresas desagradáveis, definirem o modo de
operação e configuração do pior caso, além de definirem critérios para falhas no teste de
imunidade.
Testes de total conformidade podem ser realizados nos laboratórios da própria empresa ou
por laboratórios externos credenciados. É importante que a configuração do teste para o
cumprimento total dos requisitos seja capaz de realizar os testes de acordo com as normas
exigidas. Os fatores que muitas vezes são cruciais para saber se os testes serão feitos
internamente na empresa ou não é o orçamento disponível, habilidades e recursos técnicos, a
natureza do produto que deve ser testado e os requisitos das normas aplicáveis.
- 20 -
Testes de EMC de produção significam que o fabricante deve certificar que o processo de
fabricação garanta a conformidade de cada produto de acordo com a diretiva EMC. Isso
provavelmente vai envolver algum tipo de sistema de amostragem ou comparação de produtos
padrão. Um produto padrão é uma amostra que foi testada e aprovada de acordo com as
diretivas. Estes testes são simples e um dispositivo de teste com a instrumentação necessária
para detectar variações devido às tolerâncias de produção pode ser tudo o que é necessário.
Existem basicamente cinco diferentes fenômenos que são examinados em cada produto
que busca a certificação, sendo as emissões de radiação, as emissões conduzidas, imunidade à
radiação, imunidade à condução e descarga eletrostática. Todos são essenciais uma vez que o
produto não deve apenas ser capaz de funcionar em estreita proximidade com outros produtos,
mas também não interferir nestes.
- 21 -
- 22 -
CAPÍTULO 3
COMPATIBILIDADE ELETROMAGNÉTICA AUTOMOTIVA
3.1. HISTÓRICO DE EMC AUTOMOTIVO
O primeiro produto de consumo a ser submetido à legislação EMC foram os automóveis
no Reino Unido. Isto foi devido aos ruídos pulsantes em banda larga originados do sistema de
ignição por centelha, que originalmente era de magnitude suficiente para causar interferências
na recepção das televisões domésticas. Em 1952, o parlamento inglês aprovou uma portaria
para limitar este tipo de interferência. A distância entre o veículo e uma antena receptora
domestica foi assumida como sendo de 10 m, e então o propósito de padronizar foi criado
implicando que a redução das emissões por radiação eram questões sérias [9].
Nos anos de 1950 e 1960, o número de veículos com rádios aumentou significativamente
exigindo um maior grau de limitação a fim de reduzir a interferência no áudio a um nível
aceitável, compensando tanto os ruídos dos sistemas de ignição mais próximos quanto o nível
relativamente baixo do sinal fornecido por uma antena veicular. Houve a adição do fenômeno
da interferência por condução, que também pode causar interferência audível perceptível no
rádio, originado a partir dos transientes gerados pelo sistema de ignição e outros dispositivos
elétricos do veículo que são conduzidos ao rádio através dos circuitos de alimentação 12 V.
Os dispositivos eletrônicos de estado sólido foram introduzidos no sistema elétrico
veicular no início de 1970. Inicialmente, semicondutores discretos foram utilizados em
alternadores, rádio e sistema de ignição. Quando estes foram inseridos, foi importante garantir
que poderiam suportar os transientes de alta tensão presentes nos cabeamentos do veículo [9].
Em meados dos anos 1970, circuitos integrados e microprocessadores começaram a ser
usados no controle das funções do veículo, que haviam sido implementados previamente por
meios puramente mecânicos. Um exemplo é o sistema de injeção de combustível controlado
eletronicamente que substituiu o carburador mecânico nos veículos mais caros da época. Tais
sistemas são, naturalmente, vítimas em potencial das emissões irradiadas.
- 23 -
3.2. ASPECTOS DE EMC AUTOMOTIVO
Para qualquer tipo de sistema eletrônico embarcado, é possível classificar os aspectos de
EMC automotivo em cinco categorias: emissões conduzidas, imunidade à condução, emissões
irradiadas, imunidade à radiação e descarga eletrostática, como mostrado a seguir:
Emissões Conduzidas
Uma vez que não exista uma conexão física externa entre o veículo e o meio que o cerca,
todas as emissões conduzidas que estão presentes no veículo são causadas apenas pelos, e
afetam apenas, seus componentes. Estas emissões conduzidas são ou transitórios que surgem
da comutação de motores elétricos, solenoides, relés e outros componentes indutivos, ou
contínuos criados, por exemplo, por um sistema PWM. As emissões são conduzidas ao longo
do chicote elétrico e dentro dos circuitos de potência dos sistemas eletrônicos [9].
Imunidade à Condução
Os transientes que são acoplados nos sistemas elétricos através dos cabos podem causar
mau funcionamento dos componentes expostos a estes. Uma solução para este problema é
limitar a amplitude dos transientes que os dispositivos indutivos causam. Outra opção é
controlar a susceptibilidade à condução de sistemas eletrônicos de modo que nenhum
transiente seja suficientemente forte para causar uma perturbação. Isto pode ser feito, por
exemplo, por filtros de entrada, limitadores de nível de tensão, etc [9].
Emissões Irradiadas
As emissões irradiadas decorrem basicamente de três fontes do veículo. Uma fonte é o
chicote elétrico (o cabeamento) que pode agir como uma antena irradiando assim as emissões
provenientes dos transientes conduzidos. Outra fonte são os sistemas eletrônicos que contém
processamento de alta velocidade, como os circuitos microprocessadores. Os pulsos de clock
dos microprocessadores de alta velocidade apresentam harmônicos que se estendem a mais de
100 MHz, que são irradiados tanto diretamente a partir do sistema, como a partir das trilhas da
placa de circuito impresso ou do cabeamento tal como uma antena. A última fonte de
emissões de radiação do veículo são os circuitos eletrônicos chopper. Estes muitas vezes são
utilizados para a regulagem de lâmpadas ou controle de velocidade do motor e têm uma
frequência de comutação na faixa de dezenas de quilohertz. Isto implica que as emissões a
partir dos circuitos chopper terão harmônicas significativas na faixa de mega-hertz.
- 24 -
O problema mais evidente causado pelas emissões irradiadas é a interferência audível no
rádio do veículo. Existe apenas uma forma de evitar a rádio interferência, que consiste em
controlar o nível das emissões de radiação. No caso em que as emissões de radiação são
originárias de um circuito microprocessador, um projeto robusto a fim de reduzir as emissões
por radiação é absolutamente necessário. As emissões por radiação a partir de um motor
elétrico são mais difíceis de eliminar e muitas vezes necessitam da adição de alguns
componentes a fim de não interferir com quaisquer outros equipamentos eletrônicos [9].
Imunidade à Radiação
É difícil prever o ambiente eletromagnético no qual um veículo será submetido uma vez
que este funciona em um ambiente móvel. Alguns exemplos de ambientes onde o veículo
pode ser submetido a um campo eletromagnético severo consistem nas proximidades de
transmissores de radiofrequência, transmissores militares, telefones celulares e radares.
Na maioria dos casos, são os próprios módulos de comunicação embarcados que criam os
maiores valores de intensidade de campo que influenciam o veículo. Embora a intensidade de
campo a partir destes aparelhos seja muito elevada, muitos destes componentes tais como
transceptores de serviço de emergência e de telefones celulares são bem controlados, e seus
fabricantes têm desenvolvido os produtos em estreita proximidade com os responsáveis pela
instalação dos transmissores, ou seja, as montadoras de veículos. Isto é para assegurar que as
antenas transmissoras estejam localizadas em posições adequadas sobre o veículo e que o
cabo de alimentação seja mantido bem longe do cabeamento sensível. No entanto, em alguns
casos, o equipamento eletrônico deve ter uma imunidade ainda maior contra as emissões de
radiação, como nos casos em que radioamadores instalam equipamentos sem considerarem os
outros equipamentos eletrônicos embarcados do veículo [9].
Descarga Eletrostática
A eletricidade estática é um fenômeno de acumulação de cargas elétricas em um corpo,
seja este um condutor, semicondutor ou isolante. Esta eletricidade deve-se ao fato dos átomos
dos corpos apresentarem desequilíbrio quanto a sua neutralidade. A carga acumulada produz
um campo elétrico que pode ser medido e afetar outros objetos à distância. Já a descarga
eletrostática é definida como a transferência dessa carga entre corpos com potenciais elétricos
diferentes. A forma mais nociva de ESD é a centelha ou faísca, que ocorre quando um campo
elétrico intenso cria um canal condutor ionizado no ar. Isso pode causar um pequeno
- 25 -
desconforto às pessoas, danos graves ao equipamento eletrônico, e incêndios e explosões se o
ar contiver partículas ou gases inflamáveis [17].
Na indústria eletrônica atual o controle de ESD afeta diretamente a produtividade e a
confiabilidade dos produtos, além de se tornar cada vez mais importante graças às novas
tecnologias e a miniaturização dos componentes semicondutores. Se a tensão gerada superar a
tensão limite dos semicondutores utilizados, uma falha ou degradação de operação ocorrerá.
Danos por ESD são geralmente causados ou pela descarga eletrostática direta no dispositivo,
ou descarga originada do dispositivo, ou descarga por campo induzido. Independente da
origem do dano provocado no dispositivo, um evento de ESD é determinado pela capacidade
do dispositivo em dissipar a energia da descarga ou suportar os níveis de tensão envolvidos. O
nível no qual um dispositivo falha é conhecido como "sensibilidade ESD" do dispositivo.
3.2.1. Campos Eletromagnéticos e Eletrônica dos Veículos
Há duas maneiras dos campos EM serem acoplados nos sistemas eletrônicos do veículo. A
primeira é através das trilhas da placa de circuito impresso ou do cabeamento interno do
módulo. Ambos atuam como antenas e convertem o campo em tensão ou corrente conduzida.
A segunda forma de acoplamento é devido ao cabeamento do veículo que atua como uma
antena e conduz a interferência para dentro do sistema eletrônico, conforme Figura 3.1.
Uma vez que o processo de acoplamento é fortemente dependente da frequência da
interferência nem o cabeamento e nem o sistema eletrônico funcionarão como antenas
eficientes em frequências iguais ou abaixo de 20 MHz. Isto é devido ao seu comprimento, o
qual é relativamente curto em comparação com o comprimento de onda da interferência (uma
antena com comprimento igual a um quarto de comprimento de onda possui boa
performance). O cabeamento funciona como uma antena razoavelmente eficiente entre 20 e
200 MHz. Correntes de magnitude de 1 mA podem ser induzidas para cada volt por metro de
campo elétrico de interferência [9].
O chicote do veículo atenua as altas frequências acima de 200 MHz e, portanto, não é
mais uma antena eficiente. Mas os comprimentos das trilhas da PCB tornam-se comparáveis
ao valor de um quarto de comprimento de onda e a interferência poderia, então, ser acoplada
diretamente ao sistema eletrônico, mas felizmente os circuitos eletrônicos possuem filtros
atenuadores de altas frequências, e alguns também são blindados magneticamente por seu
encapsulamento, e assim nenhum problema geralmente ocorre.
- 26 -
Figura 3.1 - Acoplamento de interferências na eletrônica dos veículos [9]
3.3. SISTEMA DE ATERRAMENTO AUTOMOTIVO E BATERIA
Condutores referenciados ao terra, muitas vezes executam (intencionalmente ou não) mais
de uma tarefa em um sistema elétrico. Em um veículo, o termo aterramento é ainda mais
amplo e é frequentemente usado como uma descrição de condutores que funcionam
como [18]:
um caminho de retorno da corrente;
uma superfície condutora equipotencial que oferece um nível de referência de tensão
para sensores analógicos e lógica digital;
condutores blindados, que são utilizados como caminhos para correntes induzidas por
radiofrequências;
um dreno para cargas eletroestáticas.
- 27 -
Quando o motor de um veículo está em movimento o alternador fornece corrente para a
maioria das cargas DC, mas a indutância interna do alternador é demasiadamente grande para
fornecer rapidamente correntes chaveadas e, por consequência, a bateria fornece estas
correntes. Esta configuração faz o caminho de retorno da corrente um tanto ambíguo. Uma
complicação adicional é o motor de arranque, uma vez que, a fim de assegurar a
funcionalidade em baixas temperaturas, deve ter um caminho de retorno de corrente com uma
resistência DC muito baixa. Isto implica que o negativo da bateria deve ser conectado ao terra
do motor de arranque (ao bloco do motor), e esta configuração do conjunto motor de arranque
e bateria pode causar loops desfavoráveis neste condutor de aterramento.
A bateria de um veículo não é apenas um armazenador de energia elétrica, mas também
executa a função de supressão de ruído. Também possui uma característica elétrica altamente
não linear sendo dependente da frequência, do estado de carga e da corrente de carga. Em
baixas frequências a bateria tem uma reatância capacitiva de 1 a 2 F por 100 Ah. Esta
reatância reduz os componentes de ruído de baixa frequência criados pelo sistema de ignição
quando a bateria é colocada em paralelo com o alternador [9].
Para frequências na faixa de 25 kHz a 250 kHz a capacitância da bateria é praticamente
constante com a frequência e da ordem de algumas dezenas de nF. Em frequências mais altas
a complexidade da bateria aumenta e então é melhor representada por um circuito LC,
incluindo a indutância do condutor. Isto implica que séries de ressonâncias são comuns para
frequências acima de 1 MHz, e que a bateria deixa de fornecer uma confiável supressão de
radiofrequências na banda AM e acima. Lista de bandas de frequência consulte o Apêndice B.
Embora haja uma tendência na indústria automotiva em direção a carrocerias de plástico
ou compostos nos veículos, a maior parte da carroceria ainda tem um teor de metais
significativo. Devido ao seu tamanho, forma e localização conveniente (ao lado da maioria
dos componentes elétricos), a carroceria metálica oferece uma oportunidade única para os
caminhos de retorno da corrente, referência de potencial, blindagem, e redução de ruído. A
grande área superficial e a forma volumétrica da carroceria oferecem uma significativa autocapacitância. Verifica-se que a carroceria é um dissipador eficaz para correntes de ruído de
baixa frequência com pequenas amplitudes. Utilizar a carroceria para estes propósitos
aumenta o risco de acoplamento de impedância comum. Isto é especialmente um problema
quando a corrente tem que passar através das junções da carroceria. O uso indiscriminado da
- 28 -
carroceria como um caminho de retorno universal da corrente poderia também eliminar suas
características benéficas e criar uma fonte significativa de emissões de radiação [9].
A carroceria pode também ser utilizada para a blindagem capacitiva em baixa frequência.
É também o condutor primário através do qual o veículo é protegido contra raios, descargas
eletrostáticas geradas por humanos e outras fontes de radiação.
Em uma carroceria ideal, as chapas metálicas devem ser conectadas eletricamente, e
painéis móveis, tais como portas e capô, devem ser também conectados com cabos de
aterramento. A carroceria deve também ser conectada ao negativo da bateria através de uma
conexão robusta de baixa impedância. Estes tipos de conexões são raramente presentes na
carroceria que são normalmente unidas por pontos de solda ou parafusos possuindo camadas
intermediárias não condutoras de inibidores de corrosão ou tintas [9].
3.4. SELO ‘e’ AUTOMOTIVO
Como mencionado anteriormente, a diretiva europeia de EMC, que originou as diretivas
globalmente utilizadas, exige que todos os produtos elétricos e eletrônicos colocados à venda
na EU cumpram com os requisitos especificados para que tenham o selo CE. Isso é válido
para todos os produtos elétricos, a menos que uma diretiva específica para um produto seja
exigida, e um exemplo de uma diretiva específica utilizada é para a indústria automotiva. A
principal razão para a indústria automotiva ter suas próprias diretrizes é que nenhuma das
normas europeias existentes era suficiente para abranger os diversos tipos de ambientes a que
um veículo a motor pode ser exposto. Uma vez que um veículo é móvel, é difícil prever os
ambientes eletromagnéticos a que será exposto. Alguns exemplos de ambientes
eletromagnéticos severos a que um veículo pode ser exposto são os locais próximos a
transmissão de radiofrequência, aeroportos (com radares) e pela instalação de equipamentos
de comunicação móvel embarcada. Uma vez que existem muitas aplicações críticas de
segurança, como freios com sistema antitravamento mesmo atualmente nos automóveis
básicos, é vital um alto nível de imunidade no sistema elétrico de um veículo [9].
Isto levou a indústria automotiva a criar seu próprio selo, chamado de selo ‘e’, desde 1970
é requerida a aprovação de todos os veículos vendidos na EU. Desde 1º de outubro de 2002,
também todos os fabricantes de autopeças de produtos de reposição destinados a serem
- 29 -
utilizados em veículos são obrigados a obterem uma aprovação formal para seus produtos
antes de colocá-los no mercado [19].
Os testes e as regras de aprovações requeridos para o selo ‘e’ são diferentes das regras
regulares para o selo CE. A principal diferença entre os dois selos é o caminho para
aprovação. A regra para o selo CE é a autodeclaração do fabricante, já para o selo ‘e’ é
exigido o cumprimento da diretiva automotiva para homologação formal. Este tipo de
homologação para um produto automotivo só pode ser emitido por uma autoridade de
homologação em um dos estados membros da EU. Existem duas maneiras na qual o veículo
pode ser aprovado, sendo a primeira o veículo completo juntamente com todos os seus
componentes disponíveis, ou os componentes podem ser testados individualmente sobre a
bancada e aprovado em sua própria norma. Testar cada componente individualmente é uma
opção interessante, uma vez que pode haver inúmeros componentes alternativos de projeto
disponíveis. Um exemplo é o sistema de áudio de um veículo, onde seria muito demorado e
dispendioso repetir-se o teste com o veículo completo para cada rádio alternativo que estiver
disponível.
Há três áreas em que o selo ‘e’ está focado: em emissões em banda larga,
predominantemente geradas pelo sistema de ignição de motores a combustão, em emissões
em banda estreita, geradas por harmônicos de osciladores de clock de microprocessadores, e
em imunidade a radiação de campos eletromagnéticos externos (ver Apêndice C para
definições de banda larga e estreita). Além disto, os métodos de ensaio para o selo ‘e’ diferem
dos métodos utilizados no selo CE. Um exemplo é quando subconjuntos eletrônicos não
automotivos são testados, onde normalmente emprega-se a norma CISPR 22 de testes, mas
para o selo ‘e’, testes de acordo com a diretiva 2004/104/EC (CISPR12 & CISPR 25) são
necessários. As principais diferenças entre estes métodos podem ser observados na
Tabela 3.1.
Tal como acontece com a diretiva geral de EMC, há um certo número de testes
necessários para demonstrar o desempenho aceitável de um veículo a motor.
Quando um fabricante tem um produto que acredita ser compatível com a 2004/104/EC,
inicia-se o processo de homologação formal para que o produto possa ser vendido no mercado
da EU. Os testes formais do produto são realizados em um laboratório aprovado pelas
autoridades que vão garantir que a amostra de teste e seu arranjo são configurados para
- 30 -
suportar a condição de pior caso. O fabricante deve apresentar a documentação do produto
para suportar o pedido de homologação. Quando todos os testes tiverem sido concluídos com
sucesso, um certificado é emitido tornando-se uma parte da homologação do veículo [20].
2004/104/EC
CISPR 22
Equipamento sob teste (EUT) colocado a
EUT colocado em superfície não condutora,
50 mm acima da plataforma fixa com
com plataforma giratória 800 mm acima do
superfície condutiva, e 1 m acima do plano de
plano de referência (terra).
referência (terra).
Distância do local da antena a 1 m do EUT.
Distancia do local da antena a 10 m do EUT
(ou 3 m com os resultados extrapolados para
10 m).
EUT fixo durante os testes.
EUT rotacionado 360° durante o teste.
Medida da altura da antena fixa durante teste.
A medida da altura da antena varia de 1 a
4 m, durante o teste.
Antena apontada para o ponto médio do
cabeamento ligado ao EUT.
Antena apontada para o EUT.
Classe de produtos única.
Duas classes de produtos (A e B), com
diferentes linhas de limite.
Dois tipos de emissões, em banda larga e
banda estreita, com diferentes linhas de
limite.
Mesmas linhas limites aplicada a todos os
tipos emissões.
Detectores de média e quase-pico são
utilizados para as emissões de banda estreita
e banda larga, respectivamente.
Apenas detectores de quase-pico são
utilizados (ver Apêndice D para detectores de
pico, quase-pico e média).
Tabela 3.1 – Diferenças entre 2004/104/EC e CISPR22 [19] [20]
3.4.1. Teste de Emissões Conduzidas
Uma vez que um veículo normalmente não está conectado fisicamente ao ambiente por
meio de cabos, a legislação para veículos não contém requisitos para testar as emissões
conduzidas. A legislação para testar subconjuntos eletrônicos é derivada da legislação para
veículos e, portanto, a Diretiva 2004/104/EC Automotiva não contem qualquer requisito em
matéria de emissões conduzidas para estes também. Supõe-se que o cabeamento de um
veículo é um produto eletricamente ruidoso, e é, por consequência, ignorado sabendo-se que
um subconjunto eletrônico polui o cabeamento ainda mais. Fabricantes de veículos utilizam
tradicionalmente a lógica oposta e afirmam que um subconjunto eletrônico deve ter um
elevado nível de imunidade à interferência conduzida para seu adequado funcionamento.
- 31 -
3.4.2. Teste de Emissões Irradiadas
A ideia do teste de emissões irradiadas no veículo é a de assegurar que este não cause
qualquer interferência desnecessária aos outros usuários em via pública ou de quaisquer
outros receptores de rádio fixos. O problema com a interferência na sintonia e áudio do rádio
em veículos não é coberto nas diretivas, mas é uma questão de qualidade para o fabricante [9].
Quando se tratam de emissões de radiação a diretiva do veículo fornece dois limites, um
para as emissões de banda larga e outro para banda estreita. Emissões de banda larga são
aquelas características dos sistemas de ignição, e as emissões de banda estreita são aquelas
características dos sistemas baseados em microprocessadores. Cada EUT é testado tanto
contra os limites de banda larga quanto os de banda estreita. Isto implica que um fabricante
cauteloso assegura que as emissões caiam muito abaixo da banda estreita, não importa qual a
classificação o produto tenha. Testes de acordo com a CISPR 12 para veículos e CISPR 25
para subsistemas são as normas de referencias utilizadas globalmente.
3.4.3. Teste de Descargas Eletrostáticas
Um subconjunto eletrônico de um veículo não precisa atender qualquer critério específico
de descargas eletrostáticas. A diretiva 2004/104/EC coloca a responsabilidade sobre os
fabricantes de garantirem que estes sejam imunes às descargas eletrostáticas.
3.4.4. Teste de Susceptibilidade a Condução
Um veículo não precisa atender diretamente a qualquer critério específico de
susceptibilidade a condução, entretanto os subsistemas eletrônicos desenvolvidos para baixa
tensão (12 V e 24 V) devem satisfazer os requisitos da norma ISO 7637-2, onde está incluída
a imunidade à interferência de transientes.
3.4.5. Teste de Susceptibilidade a Radiação
Os requisitos de imunidade à radiação para subsistemas eletrônico automotivos são muito
problemáticos. Um exemplo é a intensidade do campo elétrico para o teste de imunidade em
campo aberto que é 30 V/m (embora alguns fabricantes de automóveis tenham requisitos
internos recomendando 100 V/m), que pode ser comparado com os 3 V/m da EN55024B, que
é o padrão para testar-se a imunidade de equipamentos de tecnologia da informação [9].
- 32 -
De acordo com a diretiva 2004/104/EC os testes devem seguir a norma ISO 11452-1,
11452-2, 11452-3, 11452-4 e 11452-5 para subsistemas. O requisito para a imunidade é
mostrar que a segurança básica do veículo não é comprometida, por exemplo, por
transmissões de rádio, e, por isso, os componentes que podem afetar o controle direto do
veículo devem passar nos requisitos de imunidade. Exemplos de tais sistemas são: o controle
de cruzeiro, os freios anti-bloqueio, direção elétrica e iluminação.
3.4.6. Teste de Susceptibilidade a Radiação em Veículos Completos
Quando veículos completos são testados quanto à susceptibilidade a radiação, todos os
sistemas são ensaiados de uma só vez. O veículo é normalmente colocado em uma câmara
semi-anecóica com dinamômetros sob as rodas (rolamentos para simular movimento), de
modo a ser capaz de tracionar o motor do veículo. Uma vez que veículos completos
demandam muito tempo para serem testados, a câmara fornece arrefecimento a ar forçado
para o motor e um sistema de extração de gases de escape. Durante o tempo em que os testes
são realizados, nenhuma pessoa pode estar dentro das câmaras, devido às elevadas amplitudes
dos campos gerados. O veículo é, então, monitorado por câmeras de vídeo que são colocados
no interior da câmara. O sinal é enviado para a sala de controle através de cabos de fibra ótica,
onde é supervisionado por técnicos [9]. A Figura 3.2 ilustra os equipamentos utilizados:
1) compartimento blindado por material absorvente; 2) material absorvente de RF; 3)
dinamômetro na plataforma giratória; 4) antena; 5) sala dos ampliadores; e 6) sala de controle.
Figura 3.2 – Aparato de teste da ISO 11451-2 [21]
- 33 -
De acordo com a diretiva 2004/104/EC os testes devem seguir as normas ISO 11451-2 e
11451-4 para veículos completos. A frequência na qual normalmente o veículo sofre a
radiação é na faixa de 1,5 MHz a 2 GHz com a intensidade do campo variando de 30 V/m a
100 V/m, mas esta faixa pode se entender de 100 kHz a 10 GHz de modo a simular um
cenário ainda mais severo. Os sinais utilizados podem ser de onda contínua, modulação de
amplitude com um índice de modulação de 0,8, ou modulação de fase com ton de 577 µs e
período igual a 4600 µs (f = 217,4 Hz) [20].
Um método normalmente utilizado no teste de susceptibilidade a radiação é o método da
substituição, uma vez que este se assemelha bem com a realidade. Quando o método da
substituição é empregado, um ponto próximo ao ponto médio do painel de instrumentos é
selecionado como um ponto de referência para a intensidade do campo. A intensidade do
campo nesse ponto é determinada primeiramente quando não há nenhum veículo presente na
câmara. A potência que é necessária para se produzir a amplitude de campo pretendido no
ponto de referência é então medida. Este valor da potência de saída é então utilizado durante
os testes quando há um veículo presente na câmara. Normalmente, três antenas são utilizadas
durante os ensaios neste método, uma na parte da frente do veículo e uma em cada lado do
veículo [9].
Às vezes, os fabricantes de automóveis também colocam transmissores móveis dentro do
veículo para analisar como o veículo resistiria às altas intensidades de campo localizadas
geradas por esses transmissores.
3.5. EMC EM VEÍCULOS COM MOTORES ELÉTRICOS
Do ponto de vista de EMC, a integração de sistemas de acionamento de tração elétrica em
veículos representa atualmente um desafio considerável. Sob a perspectiva de EMC, as
unidades de tração operam de forma semelhante a pequenas unidades de controle PWM, por
exemplo, o acionamento dos vidros elétricos ou a unidade de direção elétrica assistida, mas
em uma ordem de magnitude maior de tensão e várias ordens de magnitude maiores de
potência. Tais unidades de tração são usadas em veículos movidos exclusivamente a bateria,
em veículos híbridos (elétricos e a combustão) e em veículos movidos a célula de
combustível. Se esta unidade de tração for tratada como um componente automotivo
convencional haverá problemas de incompatibilidade [4].
- 34 -
A unidade de tração elétrica é um sistema constituído pela fonte de alta tensão
(tipicamente em torno de 370 V), pelo conversor de frequência, e por motores elétricos e
cabos de alta potência. Esta alta tensão e potência implicam que os procedimentos de ensaios
convencionais não são apropriados para tais componentes devido ao tamanho, ao peso, a
potência e ao ruído emitido. Os componentes de acionamento elétrico estão conectados a um
barramento DC de alta tensão, projetado para ser uma rede de alimentação galvanicamente
isolada e não galvanicamente conectada ao sistema elétrico convencional (12 V).
Uma vez que os sistemas eletrônicos de potência são conhecidos por serem a principal
fonte de interferências eletromagnéticas nos sistemas de acionamento elétrico, há uma grande
quantidade de pesquisas nessas áreas. Diferentes topologias de conversores tais como
conversores ressonantes ou inversores multiníveis têm sido exploradas para melhorar a
propulsão elétrica, mas as primeiras aplicações comerciais foram equipadas com hardwares
convencionais de conversão de energia chaveada. As maiores fontes de ruído na eletrônica de
potência são as chaves semicondutoras (ex. IGBTs). Os curtos tempos de subida e descida de
tensão criam uma quantidade significativa de ruído eletromagnético [4].
Um aspecto muito importante que deve ser levado em consideração durante o processo de
desenvolvimento de um veículo acionado eletricamente são os cabos do barramento de alta
tensão, visto que a magnitude das correntes, o comprimento dos cabos e a frequência do ruído
implicam que as aplicações de eletrônica de potência emitem os ruídos principalmente através
dos cabos. Normalmente, os cabos que conectam o conversor aos motores são mantidos
curtos para obterem-se resultados tão bons quanto possível em termos de redução de volume e
interferência. Uma vez que o espaço no veículo é limitado, poderá haver cabos longos na
conexão à tensão de alimentação devido aos desvios frente à disposição dos componentes.
Existem cabos que transportam cerca de 900 V dentro do sistema. Uma questão importante
durante o processo de projeto é descobrir se cabos blindados são necessários ou não.
Geralmente, a blindagem reduz as emissões, a fim de assegurar a compatibilidade
eletromagnética dentro do sistema. Os inconvenientes com a blindagem são os maiores
custos, o aumento de peso e os problemas na montagem. Os cabos blindados tem uma
flexibilidade reduzida e não é possível assegurar a imobilização da blindagem depois de
algum tempo, devido às vibrações do veículo em movimento. Quanto aos critérios de EMC, a
melhor solução seria uma blindagem comum dos cabos do barramento de alta tensão.
Infelizmente, tal solução tende a agravar o problema uma vez que as condições de
arrefecimento serão prejudicadas. Este cenário conduziria a um aumento do tamanho dos
- 35 -
cabos e a um custo ainda mais elevado, além de uma menor flexibilidade. O ponto ideal entre
os cabos blindados e a supressão de ruídos deve, portanto, ser encontrado para cada aplicação
específica [9].
Um sistema de acionamento elétrico é constituído por diversos componentes, os quais
somente são ligados ao barramento de alta tensão. Quando um sistema de acionamento
elétrico está integrado a um veículo, é o sistema elétrico convencional e os seus dispositivos
de baixa tensão que devem ser protegidos contra a interferência, os quais devem possuir
supressores de ruídos. Isto implica que as conexões entre o sistema convencional e o novo
sistema devem ser cuidadosamente analisadas, conforme Figura 3.3.
Figura 3.3 - Exemplo de um veículo equipado com uma unidade de tração elétrica. As capacitâncias
parasitas são mostradas em cinza claro [9]
No entanto, como mencionado anteriormente, o sistema de alta tensão é isolado e, por
isso, não utilizará a carroceria do veículo como o retorno de aterramento. Uma forma de
acoplamento importante entre os dois sistemas é o crosstalk acoplado capacitivamente entre
os cabos. O crosstalk é uma interferência indesejada que um canal de transmissão causa em
outro. O sinal que é transmitido em um meio gera uma perturbação sobre outro que esteja em
suas proximidades. Este tipo de ruído será maior tanto quanto forem maiores as proximidades
entre os condutores, a amplitude dos sinais e as frequências dos mesmos. Uma vez que o
espaço para o cabeamento é muito limitado em um veículo moderno, o crosstalk não é uma
forma de acoplamento que possa ser desprezada.
- 36 -
CAPÍTULO 4
REQUISITOS E METODOLOGIA DE TESTES DE EMC AUTOMOTIVOS
4.1. ESTRUTURA DE DESENVOLVIMENTO DE VEÍCULOS
Uma aproximação estruturada do projeto de sistemas veiculares aplicada ao longo do
desenvolvimento é apresentada na Figura 4.1, onde é sintetizado o processo em ‘V’ pela
busca da excelência nos resultados, seguido pelo breve descritivo de seus respectivos passos.
Figura 4.1 – Estrutura de desenvolvimento de veículos
Passo 1 – Requisitos e Especificações: definem-se os requisitos e especificações, e
verifica-se se suas respectivas descrições e métricas são consistentes e completas, e se
atendem às necessidades atuais dos clientes e cumprem com a regulamentação dos países
a que se destina o produto. Uma vez que os produtos tendem a ser vendidos globalmente,
é fundamental realizar-se uma ampla pesquisa nesses mercados visando encontrar e
definir os corretos requisitos de EMC, que nem sempre estão claros, evitando-se perda de
mercado e reengenharia no futuro.
Passo 2 – Arquitetura do Sistema: define-se a arquitetura do sistema avaliando-se os
atributos técnicos, performance desejada, confiabilidade e custo. Modelos matemáticos da
arquitetura são implementados em softwares comerciais de engenharia, como o
Unigraphics NX [22].
- 37 -
Passo 3 – Projeto do Sistema: dividido em subsistemas e componentes, modelos
conceituais, matemáticos ou físicos, são criados. Os modelos matemáticos dos sistemas
são implementados em softwares comerciais de engenharia. Neste passo a simulação pode
auxiliar antevendo resultados de performance, mecânica e/ou elétrica, dos subsistemas e
componentes provendo aos engenheiros informações que lhes permitam criar produtos
robustos que atendam aos requisitos pré-estabelecidos no passo 1.
Passo 4 – Projeto do Componente: escolha do melhor projeto do componente possível
baseado nas análises conceituais previamente realizadas. Neste passo, os resultados de
simulação estão disponíveis para que os engenheiros decidam pelo melhor projeto dentre
aqueles que apresentarem o cumprimento dos requisitos associado ao menor custo.
Passo 5 – Integração do Componente & Validação: Validação do componente pelo
fornecedor através da modelagem e simulação visando sua integração no subsistema
veicular específico. Protótipos físicos também são utilizados e os resultados são
comparados com as simulações para verificar a correlação entre os métodos.
Passo 6 – Integração do Sistema & Protótipo Virtual: Validação dos subsistemas e do
sistema pela montadora através de simulação e protótipos físicos, este último somente se
necessário, como é o caso de análises eletromagnéticas. Nesta dissertação será dada ênfase
a modelagem e simulação eletromagnética a partir do máximo de informações obtidas dos
passos anteriores focando-se na validação de EMC/EMI integrada veicular. Softwares de
modelagem (Unigraphics NX [22], Antenna Magus [51]), de simplificação do modelo
(Hypermesh [23]) e de simulação de EMC (CST Microwave Studio [5]) serão utilizados
para a obtenção dos resultados desejados.
Passo 7 – Validação do Sistema: Validação dos subsistemas e do sistema segundo
requisitos pré-definidos no passo 1 pela montadora através de testes físicos com
acompanhamento do fornecedor e/ou autoridades governamentais caso necessário.
4.2. CLASSIFICAÇÃO DAS INTERFERÊNCIAS AUTOMOTIVAS
As principais interferências automotivas são descritas de acordo com a Tabela 4.1, onde
também estão indicadas as causas e fontes mais comuns das respectivas interferências.
- 38 -
Classificação
Causas
Fontes
Emissão Conduzida
- CE -
Sinais transientes ou contínuos, que são
emitidos pelas fontes e conduzidos através
dos cabos e interferem com os sistemas
eletrônicos embarcados.
Alternadores, sistema
de ignição
microcontroladores,
motores elétricos,
sistema PWM, etc.
Emissão Irradiada
- RE -
Energia EM irradiada do veículo (ou
componentes) para o espaço livre que
interfere nos sistemas externos, como
rádio, TVs, radares, etc., ou nos
componentes embarcados do veículo.
Cabeamento, sistema
de vela de ignição,
microcontroladores,
etc.
Imunidade à Condução
- CI -
Sinais transientes ou contínuos, que são
recebidos pelos sistemas eletrônicos
embarcados por condução através dos
cabos.
Alternadores, sistema
de ignição
microcontroladores,
motores elétricos,
sistema PWM, etc.
Imunidade à Radiação
- RI -
Energia EM irradiada de fontes externas
que perturbam o sistema eletrônico
embarcado do veículo.
Radar, sistemas de
transmissão e
comunicação,
celulares.
Descarga Eletrostática
- ESD -
Transferências de cargas entre diferentes
potenciais que influenciam na
funcionabilidade da eletrônica embarcada.
Ocorrem durante o manuseio, montagem e
manutenção de componentes eletrônicos ou
pelos conjuntos rotativos do veículo.
Cintos, conjuntos
rotativos, bombas de
combustível, corpo
humano, raios, etc.
Tabela 4.1 – Classificação das interferências automotivas [24]
4.3. REQUISITOS GERAIS PARA VEÍCULOS AUTOMOTORES
A fim de conter as emissões eletromagnéticas dos veículos e aumentar a imunidade às
interferências internas e externas dos mesmos, muitos países e fabricantes de automóveis têm
formulado normas de EMC específicas para assegurar a compatibilidade eletromagnética dos
sistemas automotivos. Em geral, as normas de EMC automotivos podem ser classificadas
como normas de emissão e normas de imunidade.
As normas de emissão especificam a tensão máxima de rádio frequência que um veículo
pode induzir em linhas de potência ou dados, ou ainda irradiar para o espaço aberto. As
normas de imunidade especificam a energia eletromagnética que o veículo deve suportar. As
principais normas automotivas globalmente utilizadas são listadas a seguir [14] [6]:
- 39 -
ISO 11451 – “Métodos de testes de veículos para distúrbios elétricos a partir de energia
eletromagnética irradiada de banda estreita”.
ISO 11451-1
Parte 1: Princípios gerais de terminologia
ISO 11451-2
Parte 2: Fontes de radiação exterior ao veículo
ISO 11451-3
Parte 3: Simulação do transmissor embarcado
ISO 11451-4
Parte 4: Injeção de corrente de RF
ISO 7637 – “Distúrbios elétricos a partir de condução e acoplamento”.
ISO 7637-1
Parte 1: Definições e considerações gerais
ISO 7637-2
Parte 2: Condução de transientes elétricos ao longo somente das
linhas de fornecimento de energia
ISO 7637-3
Parte 3: Transmissão de transientes elétricos através do
acoplamento capacitivo e indutivo via outras linhas que não as de
fornecimento de energia
ISO 10605 – “Veículos rodoviários - Métodos de testes para distúrbios elétricos a partir de
descargas eletrostáticas”.
A gravidade dos modos de falhas ISO são classificadas de A até E como segue:
-
Classe A: todas as funções de um dispositivo ou sistema funcionam conforme projeto
durante e após a exposição à interferência.
-
Classe B: todas as funções de um dispositivo ou sistema funcionam conforme projeto
durante a exposição, no entanto, uma ou mais funções podem operar além da tolerância
especificada. Todas as funções retornam automaticamente para dentro dos limites normais
após a exposição ser removida. Funções de memória devem permanecer como na classe A.
-
Classe C: uma ou mais funções de um dispositivo ou sistema não funcionam conforme
projeto durante a exposição, mas retornam automaticamente à operação normal após a
exposição ser removida.
-
Classe D: uma ou mais funções de um dispositivo ou sistema não funcionam conforme
projeto durante a exposição e não retornam à operação normal até que a exposição seja
removida e o dispositivo ou sistema seja religado por uma ação simples do usuário.
- 40 -
-
Classe E: uma ou mais funções de um dispositivo ou sistema não funcionam conforme
projeto durante e após a exposição, e não podem retornar ao funcionamento adequado sem
reparação ou substituição do dispositivo ou sistema.
IEC CISPR 12 – “Veículos, barcos e motores de combustão interna - Características de
perturbações de radiofrequência - Limites e métodos de medição para a proteção de
receptores não integrados ao veículo”.
IEC CISPR 25 – “Veículos, barcos e motores de combustão interna - Características de
perturbações de radiofrequência - Limites e métodos de medição para a proteção de
receptores integrados ao veículo”.
72/245/EEC – “Interferência de Rádio (EMC) de Veículos”.
Regulação ECE 10 – “Prescrições uniformes relativas à homologação de veículos no que
diz respeito à compatibilidade eletromagnética”.
Regulações de Rádio ITU.
Normas SAE abrangem tanto os componentes quanto o veículo como um todo além de
seus respectivos métodos de ensaio, assim como suas referências, a ISO e CISPR. As normas
SAE de EMC tendem a se aproximar da ISO nos testes de imunidade (susceptibilidade) e da
CISPR nos testes de emissão, buscando uma clara harmonização.
A norma de EMC para componentes, série SAE J1113, é dividida em: 1) testes de
imunidade conduzida, numerados nas partes 1, 2, 3, 4, 11, 12 e 13; 2) testes de imunidade
irradiada, numerados nas partes 21 a 26; e 3) testes de emissão, numerados nas partes 41 e 42,
como mostrado na Tabela 4.2. A norma de EMC para o veículo completo, série SAE-J551, é
dividida em: 1) testes de emissão, numerada nas partes 1 a 5; e 2) testes de imunidade
irradiada, numeradas nas partes 11 a 17, como mostrado na Tabela 4.3 [3].
- 41 -
SAE J1113
Parte
1
2
3
4
11
12
13
21
22
23
24
25
26
41
42
Tipo de Testes
Definições e Introdução
Susceptibilidade à Condução
Susceptibilidade à Condução
Injeção de Corrente de RF
Imunidade a Transientes
Transientes Acoplados
ESD
Câmara Semi-Anecóica
Campo Magnético em Linhas de
Potência
Antena Stripline de RF
Célula TEM
Linhas Triplas de Medição
Campo Elétrico em Linhas de
Potência
Banda Estreita
Transientes Irradiados
Bandas de
Frequências
Normas
Compatíveis
30 Hz – 250 kHz
100 kHz – 400 MHz
1 MHz – 400 MHz
N/A
N/A
N/A
30 MHz – 18 GHz
ISO 11452/7
ISO 11452/4
ISO 7637-1 & 2
ISO 7637-3
ISO 10605E
ISO 11452/2
60 Hz – 30 kHz
-
10 kHz – 1 GHz
10 kHz – 200 MHz
10 kHz – 1 GHz
ISO 11452/5
ISO 11452/3
-
60 Hz – 30 kHz
-
10 kHz – 1 GHz
N/A
CISPR 25
ISO 7637-1
Tabela 4.2 – Normas equivalentes a SAE J1113 [3]
SAE J551
Parte
1
2
3
4
5
11
12
13
14
15
16
17
Tipo de Testes
Definições e Introdução
Banda Estreita
Banda Larga
Bandas Estreitas e Largas
Bandas Estreitas e Largas
Fontes Externas ao Veículo
Fontes Internas do Veículo
Injeção de Corrente de RF
Câmara de Reverberação
ESD
Imunidade a Transientes
Campo Magnético em Linhas de
Potência
Bandas de
Frequências
Normas
Compatíveis
30 MHz – 1 GHz
10 kHz – 1 GHz
150 kHz – 1 GHz
20 kHz – 1 GHz
500 kHz – 18 GHz
1.8 MHz – 1.2 GHz
1 MHz – 400 MHz
200 MHz – 18 GHz
N/A
N/A
CISPR 12
CISPR 12
CISPR 12
CISPR 12
ISO 11451/2
ISO 11451/3
ISO 11451/4
ISO 10605E
-
60 Hz – 30 kHz
-
Tabela 4.3 – Normas equivalentes a SAE J551[3]
Embora as normas citadas anteriormente sejam abrangentes, os tradicionais fabricantes de
automóveis também possuem suas próprias normas de EMC que diferem das normas da
SAE/ISO/CISPR, principalmente para se adequarem a todos os mercados globais aos quais
seus produtos são destinados.
- 42 -
4.4. ORGÃOS APROVADORES PARA O BRASIL
Engenheiros de todos os lugares gostariam de testar seus produtos apenas uma vez para
compatibilidade eletromagnética, utilizando um único conjunto de normas e colocando um
único selo sobre os produtos que lhes permitiriam ser vendidos em todo o mundo.
Infelizmente, essa aspiração não vai se tornar realidade a curto ou médio prazo. Ao contrário,
está se tornando ainda mais complexo à medida que as empresas buscam novas oportunidades
de vendas globais em diversos países. Os desafios nem sempre são técnicos e, cada vez mais,
são aumentados pelas agencias reguladoras em escritórios de governos para os quais os
produtos são destinados a muitos fusos horários de distância do fabricante. Cada país ou
região mantém o seu direito de determinar [25]:
se EMC é um aspecto de cumprimento obrigatório que deve ser concluído antes de
colocar produtos no mercado;
identificação da entidade que terá jurisdição sobre a regulação de EMC;
determinação dos requisitos técnicos que devem ser cumpridos - se apenas as emissões
(EMI), ou ambas as emissões e imunidade (EMC);
identificação dos padrões exigidos;
procedimentos de conformidade e arquivamentos;
determinação de quais relatórios de ensaios serão aceitos;
especificação de quaisquer selos (permissão de venda) que devem ser aplicados.
A primeira tarefa é identificar os países nos quais os produtos serão comercializados e
então determinar os requisitos de conformidade EMC (se houverem) que devem ser atendidos.
Países ou regiões que regulam EMC de produtos normalmente empregam um ou mais dos
três procedimentos abaixo para determinar a conformidade com os requisitos nacionais ou
regionais e o processo em particular pode depender do tipo de produto [25]:
Verificação - o produto é testado de acordo com a norma de EMC requerida e levado
ao mercado tendo os selos regulatórios adequados e/ou declarações de verificação sob
responsabilidade do fabricante ou importador.
Declaração de Conformidade - o fabricante ou responsável declara a conformidade do
produto de acordo com as normas pertinentes. Algumas jurisdições exigem testes em
laboratórios credenciados, como os USA, enquanto outros não o fazem. O produto pode,
então, precisar ser registrado com o regulador de EMC (Austrália, por exemplo) ou não
(EUA, por exemplo). O selo regulatório e informações ao usuário são parte do processo.
- 43 -
Certificação - o relatório de ensaio de um laboratório credenciado ou reconhecido,
juntamente com outras informações técnicas sobre o produto, é apresentado a um terceiro
independente para verificação frente aos requisitos. Se o produto está de acordo, é certificado
e numerado pelo regulador. O produto pode então ostentar o selo da certificadora. Testes
supervisionados pelo regulador também podem ser requeridos como parte da certificação.
No Brasil, o Conselho Nacional de Trânsito (CONTRAN [26]) é o órgão máximo
normativo, consultivo e coordenador da política nacional de trânsito, que determina as normas
de EMC a serem cumpridas exigindo um registro de aprovação do veículo por parte dos
fabricantes. Os fabricantes se auto certificam e informam no processo de registro a aprovação
do veículo de acordo com as normas estabelecidas.
Produtos de rádio e telecomunicações são certificados e homologados (uma aprovação
administrativa) pela Agência Nacional de Telecomunicações (ANATEL [27]) e EMC é um
requisito para aprovação. Ambas as emissões e imunidade são necessárias para equipamentos
de telecomunicações, onde as normas de referência são IEC. Muitas, mas nem todas as regras
para os dispositivos de rádio de ondas curtas são idênticas às regras da Comissão de
Comunicações Federal (FCC [28]) dos Estados Unidos.
O Instituto Nacional de Metrologia, Qualidade e Tecnologia (INMETRO [29]) é a
autoridade com jurisdição sobre a segurança geral dos produtos, bem como EMC no Brasil.
Há poucos produtos em geral que necessitam de segurança para sua certificação do
INMETRO e nenhum que exigem EMC neste momento.
A Tabela 4.4 mostra um sumário das autoridades institucionais de EMC no Brasil.
Jurisdição
Brasil - EMC
Tipo de Produto
Veículo
Rádios
(RF em geral)
Componentes
(Exceto Rádios)
Autoridade
CONTRAN
ANATEL
INMETRO
Procedimentos para
Aprovação
Registro
(Auto certificação)
Certificação e
Homologação
Não
Teste requerido no
país
Não
Sim
Não
Selo
Não
Sim
Não
Tabela 4.4 – Autoridades institucionais de EMC no Brasil [25]
- 44 -
4.5. EQUIPAMENTOS PARA TESTES DE RI DE EMC AUTOMOTIVO
O Instituto Nacional de Pesquisas Espaciais (INPE – [30]) é acreditado pela Coordenação
Geral de Acreditação do Inmetro (CGCRE [29]) e certificado de acordo com a norma ABNT
NBR ISO/IEC 17025 - Requerimentos Gerais para Laboratórios de Ensaio e Calibração sendo apto a realizar os testes de EMC no Brasil e tido como referência pelos fabricantes de
automóveis do país na busca da certificação neste tipo de teste. Com base na lista de
equipamentos utilizados no INPE nos testes de imunidade à radiação, Tabela 4.5, tem-se
apresentado nas seções seguintes um breve descritivo de suas principais características.
Equipamento
Modelo
Fabricante
Câmara Semi-Anecóica
Antena Stripline
Antena Bicônica
Antena DRG Horn
Antena Horn
Gerador de Sinal
Gerador de Sinal
Amplificador
Amplificador
Amplificador
5503
3159
3112
S17010-43-1-1
SML01
SMR40
10.000L
2000W
AS0102-400
HI-4422
HI-4455
NRVD
URV5-Z2
NRV-Z15
EMC32
ETS - Lindgren
ETS - Lindgren
ETS - Lindgren
FSA
R&S
R&S
AR
AR
MILMEGA
ETS - Lindgren
ETS - Lindgren
R&S
R&S
R&S
R&S
Sensor de Campo Elétrico
Sensor de Campo Elétrico
Medidor de Potência
Sensor de Potência
Sensor de Potência
Software/ Computador
Faixa de
Frequência
0,01 – 30 MHz
30 - 100 MHz
0,1 - 1 GHz
1 – 2 GHz
0,000009 - 1,1 GHz
1 – 40 GHz
0,01 - 100 MHz
0,08 - 1 GHz
1 -2 GHz
0,00001 - 1 GHz
0,0002 – 40 GHz
0 – 40 GHz
0,000009 – 3 GHz
0,05 – 40 GHz
-
Tabela 4.5 – Equipamentos utilizados pelo INPE nos testes de RI
4.5.1. Câmaras Anecóica e Semi-Anecóica
Câmaras totalmente anecóicas tem o objetivo de absorver energia eletromagnética em
todas as direções simulando o espaço livre. Câmaras semi-anecóica tem um piso sólido que
atua como uma superfície rígida para suportar itens pesados, como veículos, aviões ou
equipamentos industriais, de uma maneira mais eficiente que o material absorvente
encontrado em câmaras totalmente anecóica. Este piso é amortecido de modo a isolá-lo de
vibração externa e/ou sinais eletromagnéticos.
A câmara anecóica de radiofrequência é um local fechado blindado, cujas paredes são
cobertas com materiais que absorvem grande parte da energia incidente de modo a simular o
- 45 -
espaço livre. É normalmente utilizada para a realização de medições de performance de
padrões de irradiação de antenas, compatibilidade eletromagnética e medições de seção
transversal de radares. A blindagem EM atenua os sinais de interferência de RF da medição
realizada (Gaiola de Faraday) e previne que sinais gerados internamente escapem. A
Figura 4.2 mostra a câmara semi anecóica utilizada no INPE [30].
Figura 4.2 – Câmara semi anecóica do INPE [30]
A câmara mostrada na Figura 4.2 pode comportar-se como anecóica ou semi anecóica
dependendo da configuração de teste preestabelecida possuindo as seguintes características:
Câmara Blindada Anecóica: 24 x 11 x 10 (m);
Sala de Controle Blindada: 7 x 4 x 4 (m);
Sistema de Ensaios de Imunidade Conduzida e Radiada até 40 GHz;
Sistemas de Ensaios de Emissão Conduzida e Radiada até 40 GHz;
Mesa Giratória 1 (Diâmetro 2 m / Capacidade 1 ton.);
Mesa Giratória 2 (Diâmetro 9 m / Capacidade 25 ton.).
- 46 -
4.5.2. Antenas
4.5.2.1. Antena Stripline
A antena stripline é uma estrutura de linhas de transmissão para irradiação EM. As
características da antena stripline são de tal forma que as ondas EM que são canalizadas e
enviadas pelas linhas de transmissão produzem um forte campo elétrico. Este campo fica
entre os dois planos diferentes da antena. Devido à stripline ser uma linha de transmissão
eletromagnética transversal (TEM), o campo elétrico e magnético são ortogonais em fase e a
diferença de amplitude é 120π Ω (377 Ω) [31]. Na Figura 4.3 pode ser visto que o plano
superior é o irradiador a partir do qual o campo elétrico é irradiado para o plano inferior que é
o plano de terra. Este campo elétrico pode ser utilizado para testar a capacidade de
equipamentos eletrônicos de suportarem fortes campos elétricos em testes de EMC [31].
Figura 4.3 – Direção do campo elétrico irradiado por uma antena stripline [31]
Devido as suas características, antenas stripline são normalmente utilizadas no teste de
imunidade à radiação automotivo para avaliar a faixa de frequência de 1,5 MHz a
30 MHz [32]. A Figura 4.4 mostra a stripline utilizada em testes de EMC no INPE [30].
- 47 -
Figura 4.4 – Antena Stripline modelo 5503 da ETS – Lindgren [32]
4.5.2.2. Antena Bicônica
Na sua forma mais simples, a antena bicônica, normalmente um dipolo, consiste de dois
elementos em forma de cones unidos no centro, o ponto de excitação, pelo vértice de cada
cone. Sua forma mais popular simula um cone utilizando vários cabos lineares simetricamente
dispostos. Estes cabos podem ter saídas sem terminação, como no caso da Figura 4.5 que
mostra a bicônica utilizada em testes de EMC no INPE [30], ou podem ter um cabo perimetral
que liga suas extremidades. Devido as suas características, antenas bicônicas são normalmente
utilizadas no teste de imunidade à radiação automotivo para avaliar a faixa de frequência de
30 MHz a 100 MHz [32].
- 48 -
Figura 4.5 – Antena Bicônica modelo 3159 da ETS – Lindgren [32]
4.5.2.3. Antena DRG Horn
Antenas horn (corneta ou piramidal) são amplamente utilizadas em vários campos, tal
como EMC, e a razão para sua escolha é baseada em suas características únicas: fácil
excitação, construção relativamente simples, alto ganho e excelente capacidade de lidar com
potência de pico elevadas [32]. No entanto, devido ao desenvolvimento de sistemas que
devem ser testados em banda larga, as aplicações de antenas horn convencionais tornaram-se
limitadas. Agindo como filtros passa-faixa, antenas horn tem largura de banda limitada, então
métodos para ampliar a faixa de frequência de trabalho foram criados surgindo assim às
antenas horn com guias de onda de aletas duplas (DRG Horn) que foram inseridas na década
de 1960. Efeitos capacitivos causados pelas aletas dos guias de onda ajudam a alterar a
frequência de corte de modo a ampliar a largura de banda. Devido as suas características,
antenas DRG são normalmente utilizadas no teste de imunidade à radiação automotivo para
avaliar a faixa de frequência de 100 MHz a 1000 MHz, embora possam se estender a faixas
maiores, chegando próximo a 18 GHz. A Figura 4.6 mostra a DRG utilizada em testes de
EMC no INPE [30].
- 49 -
Figura 4.6 – Antena DRG Horn modelo 3112 da ETS – Lindgren [32]
4.5.2.4. Antena Horn
Antenas horns comerciais possuem a seção transversal da estrutura de guia de onda
circular ou retangular. As horns com abertura retangular são comumente utilizadas nos testes
de EMC para avaliarem a faixa de frequência de 1 GHz a 2 GHz, conforme mostra a
Figura 4.7, e classificadas em três tipos, sendo: a plano-H, a plano-E, e a piramidal. A antena
plano-H possui a largura da seção transversal retangular maior que a altura resultando em uma
melhor diretividade (indica a capacidade da antena de direcionar a potência irradiada) neste
plano, enquanto que a plano-E possui a largura menor resultando em uma melhor diretividade
neste plano. A piramidal possui largura e altura aproximadamente iguais.
Figura 4.7 – Antenas Horn com abertura retangular [32]
- 50 -
4.5.3. Gerador de Sinal
Dois geradores de sinais são utilizados durante os testes de imunidade a radiação
automotivo no INPE [30] para avaliar a faixa de frequência de 1,5 MHz a 2 GHz. O modelo
SML01 cobre a faixa de frequências até 1 GHz e o SMR40 entre 1 GHz e 2 GHz, Figura 4.8,
ambos fabricados pela R&S [33].
Figura 4.8 – Geradores de sinais SML01 à esquerda e SMR40 à direita [33]
4.5.4. Amplificador
Três amplificadores de sinais são utilizados durante os testes de imunidade a radiação
automotivo no INPE [30] para avaliar a faixa de frequência de 1,5 MHz a 2 GHz. O modelo
10.000L cobre a faixa de frequências até 100 MHz, o 2000W entre 100 MHz e 1 GHz,
Figura 4.9, ambos fabricados pela AR [34], e o AS0102-400 que cobre entre 1 GHz e 2 GHz,
Figura 4.10, fabricado pela MILMEGA [35].
Figura 4.9 – Amplificadores 10.000L à esquerda e 2000W à direita [34]
- 51 -
Figura 4.10 – Amplificador AS0102-400 [35]
4.5.5. Sensor de Campo Elétrico
Dois sensores de campo elétrico são utilizados durante os testes de imunidade a radiação
automotivo no INPE [30] para avaliar a faixa de frequência de 1,5 MHz a 2 GHz. O modelo
HI-4422 cobre a faixa de frequências até 1 GHz e o HI-4455 entre 1 GHz e 2 GHz,
Figura 4.11, ambos fabricados pela ETS [32].
Figura 4.11 – Sensores de campo elétrico HI-4422 à esquerda e o HI-4455 à direita [32]
4.5.6. Medidor de Potência
Um medidor de potência é utilizado durante os testes de imunidade a radiação automotivo
no INPE [30] para avaliar a faixa de frequência de 1,5 MHz a 2 GHz. O modelo NRVD cobre
toda a faixa de frequências desejada, Figura 4.12, e é fabricado pela R&S [33].
- 52 -
Figura 4.12 – Medidor de potência NRVD [33]
4.5.7. Sensor de Potência
Dois sensores de potência são utilizados durante os testes de imunidade a radiação
automotivo no INPE [30] para avaliar a faixa de frequência de 1,5 MHz a 2 GHz. O modelo
URV5-Z2 cobre a faixa de frequências até 1 GHz e o NRV-Z15 entre 1 GHz e 2 GHz,
Figura 4.13, ambos fabricados pela R&S [33].
Figura 4.13 – Sensores de potência URV5-Z2 à esquerda e o NRV-Z15 à direita [33]
4.5.8. Software
O software EMC32 desenvolvido pela R&S [33] é utilizado durante os testes de
imunidade a radiação automotivo no INPE [30] para analisar toda a faixa de frequência. A
Figura 4.14 mostra a interface gráfica do EMC32 sendo instalado em um computador com
plataforma Windows.
- 53 -
Figura 4.14 – Tela do software EMC32 da Rohde & Schwarz [33]
- 54 -
CAPÍTULO 5
MODELAGEM E SIMULAÇÃO DO TESTE DE EMC AUTOMOTIVO
Simulação eletromagnética significa sobretudo resolver as equações de Maxwell nas
condições particulares do problema. Sabe-se que as abordagens analíticas baseadas em caneta
e papel para se encontrarem as soluções apropriadas são limitadas, e em sistemas complexos,
complexas equações diferenciais não podem ser resolvidas por métodos analíticos [36].
Engenheiros normalmente contornam este problema com simplificações. Muitas vezes,
modelos empíricos são utilizados em substituição à realidade, por exemplo, através da
introdução de elementos de circuito. Estes modelos tipicamente têm uma faixa limitada de
funcionamento, o que é facilmente ignorado ao utilizá-los nos cálculos. Métodos numéricos
baseados em volume tridimensional (3D) tem a vantagem de possuírem poucas restrições
físicas em sua faixa de aplicação. Mesmo que uma única simulação numérica de campo
requeira mais tempo e recursos computacionais que uma simulação de circuitos, o esforço
adicional investido trará resultados de maior correlação com os testes físicos desde que a
modelagem seja corretamente realizada [36].
5.1. RESOLVENDO AS EQUAÇÕES DE MAXWELL
Todas as abordagens numéricas para se resolverem as equações de Maxwell partem o
espaço em subdomínios, onde as soluções podem ser encontradas com maior facilidade.
Métodos utilizando algoritmos correspondentes ao modo de propagação eletromagnética
compõem um sistema de ondas a partir de seções de comportamento conhecido, através da
realização de uma expansão modal [37] e associando os campos eletromagnéticos às áreas de
intersecção dos subdomínios. O Método dos Momentos (MoM) sintetiza o campo distante de
uma antena através da integração das funções de Green nos caminhos da superfície metálica.
Métodos de discretização do volume têm seus espaços subdivididos em pequenas células onde
são calculadas as equações de Maxwell sobre cada uma dessas entidades. Para resolver o
problema completo, todas as soluções devem ser resumidas em um sistema de equações, que
precisam ser abordadas por uma dessas técnicas [36].
- 55 -
Ao se discutir as propriedades dos diferentes métodos faz-se necessário primeiramente
classificá-las. O principal ponto de diferença é o domínio em que trabalham, os quais podem
ser no domínio do tempo ou no domínio da frequência. Concentrando-se nos métodos que são
mais relevantes tecnicamente, encontram-se no lado do domínio do tempo, a Técnica de
Integração Finita (FIT) [38] [39], a Diferença Finita no Domínio do Tempo (FDTD) nas
variantes explícita [40] [41] ou implícita [42] [43], além do método da Matriz de Linha de
Transmissão (TLM) [44] [45]. O domínio da frequência é representado pelo Método dos
Elementos Finitos (FEM) [46] [47], FIT e o MoM [48]. Todos estes métodos são métodos de
discretização do volume, exceto o MoM que é um método de discretização da superfície [36].
Na presente dissertação todas as simulações envolvendo o veículo modelado foram
realizadas no domínio do tempo, utilizando-se o solver Transiente (T), do software de
simulação eletromagnético CST-MWS [5], através da metodologia de cálculo FIT, que utiliza
uma representação discreta das equações de Maxwell de forma a resolvê-las a partir da
conservação de carga e energia buscando obter uma convergência mais estável [5]. No
entanto, nas simulações dos modelos das antenas DRG horn e bicônica foram também
utilizadas as metodologias TLM e o Método Multipolar Rápido Multinível (MLFMM),
pertencentes ao solveres T e Integral (I) respectivamente, também no CST-MWS [5], que
foram realizadas a título de estudo para comparação dos resultados de S11 entre métodos.
5.2. CONFIGURAÇÃO DO MODELO
Para a configuração de um modelo computacional de um dispositivo real, existem várias
etapas que são comuns a todos os métodos de simulação mencionados. Todos esses assumem
o risco de introduzirem erros na simulação, ou seja, discrepâncias entre os resultados das
simulações e as medições [36].
Primeiramente um modelo geométrico precisa ser desenvolvido ou importado de uma base
de dados como no caso desse trabalho. Isso pode ser feito tanto utilizando-se a ferramenta de
modelagem incorporada ao software de simulação quanto importando-se os dados
geométricos a partir de uma ferramenta de CAD compatível. Naturalmente que ferramentas
dedicadas de CAD possuem um número maior de recursos técnicos específicos para a criação
de modelos estruturais complexos, como a de veículos, sendo assim largamente empregadas
na indústria automobilística. Uma vez que o desenvolvimento do modelo geométrico não faz
parte do escopo deste trabalho, o modelo mostrado na Figura 5.1 foi importado. O software
- 56 -
Unigraphics NX [22], desenvolvido pela Siemens PLM Software, foi o software CAD
utilizado para a importar a geometria do veículo analisado da base de dados.
Figura 5.1 – Geometria do modelo do veículo simulado. As diferentes cores, neste caso, denotam as diferentes
partes modeladas que são agrupadas de forma a compor o modelo final.
Devido ao fato da geometria (modelo matemático 3D) do veículo estar disponível para
este trabalho, o passo seguinte é a exportação dessa geometria para um software CAE de
simplificação do modelo geométrico, o que pode ser feito utilizando-se as opções de
exportação de modelos do software CAD utilizado.
A simplificação da geometria precisa ser realizada antes da simulação para torná-la
passível de ser importada, manipulada e simulada pelo software de simulação EM, e também
visando reduzir o tempo de processamento da simulação devido às limitações do hardware
utilizado. A simplificação consiste na remoção ou suavização de partes ou detalhes da
geometria, que não possuem relevância ou interferência significativa nos resultados, como por
exemplo, na remoção de detalhes estruturais da carroceria ou do painel interno, na remoção de
componentes ou materiais de menor impacto eletromagnético, como tapetes e tecidos, e
também no agrupamento dos componentes pertencentes à mesma classe de materiais. Neste
processo de simplificação da geometria foi utilizado o software CAE Hypermesh [23],
desenvolvido pela Altair Engineering, específico para manipulação de modelos e criação de
malhas de elementos finitos para análises 3D.
- 57 -
Também é importante citar a configuração do computador utilizado na simplificação e nas
simulações. Trata-se de um computador HP Z400, com memória RAM instalada de 12 GB,
processador Intel Xeon W3550 de 3,06 GHz, operando com um sistema operacional
Windows 7 Empresarial de 64 bits, com custo aproximado de R$ 7.000,00 (U$3.000,00).
Após os processos de seleção, exportação, simplificação do modelo, que consumiu cerca
de 160 horas, chegou-se a configuração do modelo do veículo utilizado para a análise da
simulação do teste de EMC proposto por este trabalho, conforme mostrada na Figura 5.2.
Figura 5.2 - Modelo de simulação do veículo analisado, a) vista lateral esquerda e frontal (figura acima); e b)
corte com vista para o interior do veículo.
- 58 -
O modelo da Figura 5.2 foi então exportado na extensão “nas”, correspondente a arquivos
de MSC Nastran [49], para que pudessem ser importados pelo CST-MWS [5] sem perdas de
qualidade no modelo. O cuidado que se deve ter ao importar uma geometria de um software
CAD/CAE é com relação à qualidade dos filtros de importação dos softwares de simulação
que podem variar significativamente, podendo ocasionar erros de deformação, atributos e
tolerâncias nos modelos, onde informações relevantes para a simulação podem ser
negligenciadas.
O modelo do veículo simulado foi configurado considerando três categorias de materiais:
vidro, plástico e aço. Saber as propriedades exatas do material é essencial para a simulação,
embora nem sempre esta informação esteja disponível.
O esforço computacional para métodos baseados no volume depende também do tamanho
do mesmo, e o tamanho do modelo de simulação deve ser sempre finito, mesmo se na
realidade o componente é colocado em um meio circundante infinito. A fim de reduzir o
espaço que envolve o modelo, condições de contorno precisam ser introduzidas
representando, por exemplo, superfícies elétricas (condutivas), espaço livre, simetrias, ou
periodicidade [36]. Para o modelo do veículo analisado este ponto é muito relevante, devido à
utilização de uma câmara semi-anecóica para envolvê-lo no teste, logo as condições de
contorno se tornam aplicáveis e necessárias. Estas câmaras possuem um piso sólido metálico
para acomodarem itens pesados, como veículos ou caminhões, que também visam manter o
veículo blindado de sinais eletromagnéticos, possuindo o comportamento de uma superfície
elétrica. Também, possui paredes absorvedoras que emulam o comportamento do espaço
livre, sendo que na modelagem eletromagnética foram utilizadas camadas absorvedoras
denominadas PML [50] que absorvem as ondas incidentes independentemente da direção de
incidência. Simetrias não são aplicáveis ao modelo veicular analisado uma vez que as partes
internas que foram modeladas estão dispostas de modo assimétrico.
As antenas bicônica e horn DRG utilizadas pelo INPE [30], que cobrem a faixa de
frequências de 30 MHz a 1 GHz, foram modeladas de modo semelhante para serem utilizadas
nas simulações de EMC. Estes modelos foram criados a partir de um software dedicado a
modelagem de antenas, o Antenna Magus [51]. A Figura 5.3 mostra os modelos das antenas
citadas no ambiente do CST-MWS [5]. Dentre as principais vantagens do Antenna Magus
[51] destacam-se: 1) a existência de modelos de antenas pré-definidos, cujas características de
performance podem ser ajustadas de acordo com as características físicas da antena real,
- 59 -
através da correta parametrização das respectivas variáveis, tais como, a faixa de frequências
de operação e o ganho desejado; e 2) também destaca-se o fato de possuir uma interface de
extensão de arquivos compatível com o CST-MWS [5], assim os modelos são exportados
diretamente no formato “cst” garantindo que não hajam perdas de informações durante
conversões ou importações dos modelos.
Figura 5.3 - Modelos de simulação das antenas utilizadas, a) à esquerda, a antena bicônica para frequências
entre 30 MHz e 100 MHz, e b) à direita, a antena horn DRG para frequências entre 100 MHz e 1 GHz.
Também deve-se definir o local da porta do sinal de entrada do modelo da antena para
excitar a estrutura, bem como o sinal de excitação. Para simulações padrão (extrair S11 coeficiente de reflexão de entrada - e valores de campo eletromagnético) sempre é utilizado o
pulso gaussiano, em função de sua suavidade tanto no domínio tempo quanto no domínio
espectral. No caso das simulações que utilizam a onda plana definem-se os parâmetros de
polarização, direção de propagação e intensidade do campo elétrico.
Por fim, é necessário incluir uma ponta de prova para a medição de campo elétrico, de
modo a monitorar os resultados de simulação. A ponta de prova foi inserida no ponto de
referência descrito conforme procedimento de teste realizado pelo INPE. Essas portas ou
pontas de prova não tem qualquer impacto sobre os resultados da simulação, comportando-se
de maneira ideal, diferentemente das pontas de provas de campo reais.
Os itens mencionados sobre excitação, condição de contorno, materiais e ponta de prova
serão discutidos com maiores detalhes em seções posteriores.
- 60 -
5.3. FASES DO PROCESSO DE MODELAGEM E SIMULAÇÃO
As etapas a serem cumpridas, desde a preparação do modelo, passando pelos parâmetros
de simulação até chegar aos resultados, são descritos de modo simplificado na Figura 5.4.
Figura 5.4 – Fases do Processo de Modelagem e Simulação
- 61 -
5.4. EXECUTANDO A SIMULAÇÃO
Depois de configurar a representação geométrica da estrutura real de veículos e antenas no
ambiente do software de simulação, pode-se dar início aos passos para obtenção dos
resultados finais.
O primeiro passo é a discretização do espaço real, ou seja, a configuração da malha, que é
um processo automatizado em grande parte dos softwares comerciais modernos, no qual
inclui-se o CST-MWS [5]. Apesar do elevado grau de automação, a malha definida pelo
software pode precisar ser verificada ou modificada manualmente, como em regiões de portas
de excitação ou em partes do modelo com muitos detalhes, em que se faz necessário um
refinamento maior do volume para se obter uma melhor confiabilidade dos resultados.
Em um segundo passo, o software cria as matrizes do sistema modelado, baseado nas
informações geométricas da malha e no método de cálculo escolhido, para a resolução das
equações de Maxwell [2].
Depois que todas as matrizes requeridas forem criadas e o sistema matricial for montado,
o terceiro passo é iniciado, ou seja, a solução do sistema algébrico finito [36]. Dentro do
contexto definido para essa dissertação, as grandezas a serem calculadas são basicamente a de
campo elétrico E (V/m), para o ponto de prova definido no interior do veículo de acordo com
o procedimento de teste de EMC realizado no INPE [30], e o parâmetro S11 para as antenas
bicônicas e DRG que foram modeladas e utilizadas nas simulações. Ambas as grandezas
foram calculadas ao longo da faixa de frequências correspondente a cada teste, de modo a
evidenciar a correlação entre simulações e medições.
No domínio da frequência, este processo é direto, conforme visto na Figura 5.5 (b): uma
simulação fornece os parâmetros S em um ponto da faixa de frequência. No entanto, o
comportamento é, geralmente, relevante somente quando associado a uma faixa de
frequências especificada, de forma que observar em uma única frequência não é suficiente.
Portanto, um certo número de simulações, suficiente para observar-se o comportamento do
parâmetro ao longo da banda de frequência de interesse, deve ser executado. Algoritmos
especiais são utilizados para minimizar o número de simulações necessárias para alcançar a
exatidão predefinida, interpolando os parâmetros S entre os pontos de frequência simulados.
- 62 -
No domínio do tempo, a abordagem segue um fluxo diferente, conforme visto na
Figura 5.5 (a). Primeiramente o usuário especifica a faixa de frequências de interesse, que
neste trabalho varia de 1,5 MHz a 2 GHz, segundo o procedimento do teste de EMC
realizado. Na sequência, um pulso gaussiano X(f) é gerado de tal forma que seu espectro
cubra a faixa de frequências definida. Este espectro é então transformado no domínio do
tempo usando a transformada inversa de Fourier, resultando em um sinal de tempo x(t) com
um envelope gaussiano. O padrão de irradiação é então excitado, na porta de entrada, com
este padrão de tempo x(t), e propagado através da estrutura. Sinais no tempo, refletidos e
transmitidos, designados genericamente por y(t), são monitorados, e após a simulação ser
concluída, a transformada de Fourier é aplicada para se obter o respectivo espectro de
frequência Y(f). Esses espectros são eventualmente divididos pelo espectro de excitação, e
então os parâmetros S para a faixa de frequência inteira é calculada em uma única simulação.
Os sinais no tempo também podem ser utilizados para executar uma análise de reflectrometria
no domínio do tempo (TDR) da estrutura.
Domínio do Tempo
Domínio da Frequência
Domínio da Frequência
(a)
(b)
Figura 5.5 – Diagrama do procedimento de simulação para obter-se os parâmetros S de um componente
passivo (a) no domínio do tempo e (b) no domínio da frequência [36].
A correlação de uma simulação, parâmetro que confronta os resultados da simulação
versus seu comportamento real, é geralmente limitada pelas simplificações do modelo de
- 63 -
simulação. Tendo-se em mãos os resultados da simulação, pode-se questionar se estes são os
resultados verdadeiros do veículo modelado. Os métodos numéricos apenas garantem que os
resultados da simulação irão convergir em direção à solução real, se a malha for refinada o
suficiente para que todos os detalhes e contornos sejam representados no modelo numérico.
Se os resultados de interesse não mais mudam significativamente depois de vários passos de
refinamento da malha, então a solução convergente foi alcançada [36]. O confronto dos
resultados, através da aplicação de duas abordagens numéricas diferentes para o mesmo
problema, confere mais confiabilidade à simulação, como por exemplo, através da
comparação das soluções no domínio do tempo e frequência, ou entre métodos FIT e TLM
dentro do domínio do tempo. Esta verificação é conveniente se o software de simulação
oferecer a possibilidade de comutar diferentes abordagens numéricas sem alterar a interface,
como é no caso do CST-MWS [5].
Outro aspecto importante a ser considerado é a performance da simulação. Esta é definida
pelo tempo requerido para um simulador alcançar a exatidão predefinida. A diferença no
tempo de processamento pode ser significativa nos casos em que o modelo for estruturalmente
complexo, como é o caso de modelos de veículos.
A fim de encontrar-se a solução numérica mais eficiente para uma determinada aplicação,
é essencial primeiramente compreender os métodos numéricos em detalhes. Detalhes estes
que serão discutidos nas seções 5.4 e 5.5 a seguir.
5.5. DOMÍNIO DO TEMPO
Todos os métodos no domínio do tempo que são comercialmente utilizados mencionados
neste trabalho - FIT, FDTD e TLM - possuem as características de uma grade de coordenadas
cartesiana (hexaédrica cúbica ou cilíndrica circular), e um diagrama de integração explícito no
tempo. Estes dois fatores estão intimamente relacionados. A grade de coordenadas implica em
uma estrutura de banda simples das matrizes do sistema na qual um algoritmo pode ser
aplicado [40]. Os campos são propagados através da estrutura pelas multiplicações dos
vetores das matrizes com um específico passo de tempo. Quanto maior for o passo de tempo,
menor será o tempo de simulação. O passo de tempo máximo possível é determinado pelo
critério de Courant-Friedrich-Lewy (CFL) [52]. Trata-se basicamente do tempo requerido
para o sinal, que se propaga a velocidade da luz, passar pela menor célula da malha no
- 64 -
domínio de cálculo. Pode ser mais ilustrativo pensar no critério CFL como uma maneira de
forçar a informação de uma célula da malha, a tocar em cada célula da malha vizinha, em
cada passo de tempo. Os requisitos de memória e o tempo de simulação aumentam
linearmente com o aumento do número de pontos da malha. Devido a esta propriedade, os
simuladores no domínio de tempo são bem adequados para resolver estruturas eletricamente
grandes e ricas em detalhes, onde bilhões de incógnitas podem ser manipuladas e
calculadas [36].
Há outras abordagens no domínio do tempo que utilizam grades não ortogonais e/ou
diagramas de integração implícitos no tempo [42] [43]. Na área de micro-ondas e RF,
atualmente não há implementações comerciais disponíveis. Um algoritmo implícito sempre
deve resolver um sistema de equações em um determinado passo de tempo, mas na sequência
o tamanho do passo de tempo pode ser alterado para um valor maior, levando à diminuição do
tempo de simulação [36].
O domínio do tempo oferece a possibilidade de estudo do comportamento transiente das
estruturas eletromagnéticas. Para este propósito não é necessário se ater ao pulso gaussiano
que foi mencionado anteriormente, de modo que sinais arbitrários também podem ser
fornecidos ao simulador. Adicionalmente ao fato de poder ser utilizado como um analisador
de redes virtual, o simulador também pode funcionar como um virtual reflectômetro no
domínio do tempo (TDR), conforme Figura 5.5. Tempos de atraso e degradação do sinal em
linhas de transmissão podem ser simulados diretamente [36].
Não somente os sinais, mas também os campos podem ser estudados no domínio do
tempo, como por exemplo, os farfields transientes tornam-se cada vez mais importante em
aplicações de banda ultralarga (UWB). Em dispositivos de múltiplas portas, cada porta pode
ser excitada individualmente com um sinal de tempo diferente, e os campos simulados podem
ser monitorados apropriadamente.
5.5.1. Técnica de Integração Finita no Domínio do Tempo
A Técnica de Integração Finita, utilizada nas simulações deste trabalho, recebe este nome
a partir do fato de que discretiza a forma integral, ao invés da diferencial, das equações de
Maxwell [36]. As incógnitas são, 1) as tensões elétricas, denotadas por en, nas extremidades
da malha discretizada, e 2) os fluxos magnéticos, denotados por bn, sobre as faces da malha.
- 65 -
Para discretizar a lei de Faraday, Figura 5.6 (1), em uma face da malha, verifica-se que o
lado esquerdo de (1) é a integral de linha do campo elétrico (ou seja, uma tensão elétrica) ao
longo da borda da face. Esta integral pode ser escrita como uma soma algébrica das incógnitas
da borda. O lado direito é a derivada temporal (indicado por um ponto) do fluxo magnético
através da face. Note que, para qualquer malha fixa (que já inclui um erro de discretização do
espaço), nenhum erro suplementar de discretização da equação é adicionado, quando se passa
da forma contínua para a discreta. Isto porque, com esta escolha de incógnitas, a passagem de
(1) para (2) baseia-se unicamente nas propriedades matemáticas da integral. Por outro lado,
um erro de discretização das equações ocorrerá quando se discretizar as relações de
propriedades dos materiais [36]. Ao agrupar os coeficientes +1 e -1 da soma algébrica em
uma matriz C (a versão discreta do operador ‘curl’), e as incógnitas elétricas e magnéticas em
vectores e e b, uma matriz compacta resultante é formada, que se assemelha a forma
diferencial contínua da lei de Faraday
⃗
⃗ ̇ , ou seja,
⃗
⃗
.
Figura 5.6 – Diagrama da Técnica de Integração Finita no Domínio do Tempo [36]
- 66 -
De maneira similar, todas as equações de Maxwell podem ser discretizadas com o FIT
para produzirem suas formas discretas em uma forma matricial compacta [38]. Os operadores
da matriz C, ̃ (operadores curl discretos) e S, ̃ (operadores divergente discretos) são
matrizes topológicas, contendo apenas 1, -1 e 0 como entradas. Em uma grade cartesiana, o
FDTD se equivale ao FIT [39]. Mesmo a versão moderna do método FEM utiliza exatamente
a mesma forma (6) das equações de Maxwell discretizadas [46]. A diferença entre o FEM
moderno e o FIT é somente na discretização das relações de propriedade dos materiais [36].
5.5.2. Aproximação da Geometria em Métodos no Domínio do Tempo
Nos métodos FIT, FDTD e TLM tradicionais, cada célula da malha hexaédrica é
preenchida totalmente por um determinado material. Isto leva a chamada aproximação
staircase (em escada) da geometria. Obviamente que tal discretização pode dificultar a
obtenção de uma exatidão ótima da representação geométrica de muitos dispositivos, pois a
maioria dos componentes contêm características formadas por linhas curvas. Como exemplo,
a Figura 5.7 mostra a malha do modelo veículo sendo aproximada pelo método staircase.
Figura 5.7 – Aproximação da geometria do modelo do veículo pelo método staircase
- 67 -
No intuito de aumentar a exatidão nestes casos, um refinamento maior da malha deve ser
aplicado. Métodos de conformação, tal como a Aproximação de Contornos Perfeito (PBA)
[53], melhoraram a descrição geométrica, sem comprometer a eficiência da memória de
processamento [36]. O aumento do desempenho diz respeito não somente a um número menor
de células da malha, mas também a células maiores que implicam em um passo de tempo
maior. O processo de convergência PBA é rápido e estável, e pode ser seguramente assumido
que o aumento da densidade da malha irá melhorar a exatidão do resultado. Esta afirmação
não é verdadeira para aproximações em staircase onde a convergência é lenta e não estável
[36]. A Figura 5.8 mostra a malha do modelo do veículo sendo aproximada pelo método PBA.
Figura 5.8 – Aproximação da geometria do modelo do veículo pelo método PBA
Esforços têm sido feitos para melhorar a aproximação da geometria dentro da grade
cartesiana, e a partir destes esforços foram criados o FPBA (PBA rápido) e o EFPBA (PBA
rápido de exatidão aumentada) [5]. Ambos visam melhorar a aproximação geométrica,
aumentar a estabilidade e a convergência do método de cálculo, diminuir o tempo e aumentar
a correlação da simulação, em particular para grandes modelos importados, como é o caso de
modelos veiculares. Nas simulações a serem apresentadas neste trabalho optou-se pelo
EFPBA para garantir o melhor resultado possível.
- 68 -
5.6. DOMÍNIO DA FREQUÊNCIA
A característica principal dos solveres no domínio da frequência é a abordagem implícita,
e seu sistema resultante é tipicamente um grande sistema linear de equações. Logo, uma
inversão da matriz é necessária a fim de se obter a solução para uma dada frequência. Em
aplicações comerciais, o FEM com grades tetraédricas é o método numérico de propósito
geral mais popular [47]. Tetraedros são as entidades mais simples de volume, e a sua
flexibilidade em aproximar geometrias arbitrárias tem muitas vantagens, como apresentado na
Figura 5.9 que ilustra a aproximação do modelo de um conector coaxial utilizando tetraedros.
No entanto, a qualidade do tetraedro é crucial, tetraedros muito planos podem comprometer a
velocidade e a exatidão da solução, uma vez que se torna mais difícil para o método de
solução algébrica resolver o sistema [36].
Figura 5.9 – Aproximação do modelo de um conector coaxial utilizando tetraedros
Existem dois métodos distintos para resolver os sistemas de equações lineares resultante
da discretização FEM, os solveres direto e iterativo. Um solver direto trabalha diretamente
sobre o sistema de equações derivado da discretização. A sua principal vantagem é poder
resolver em paralelo várias portas de excitação ao mesmo tempo. Por outro lado, os requisitos
de memória aumentam quadraticamente com o aumento do número de tetraedros [36].
Solveres iterativos transformam o sistema original de equações em outro que possa ser
resolvido por aplicação repetida de operações, de acordo com o algoritmo especificado. O
algoritmo iterativo tem que ser executado para cada excitação individualmente. Em
compensação, os requisitos de memória são menores em comparação com um solver direto.
Da mesma forma que os métodos no domínio do tempo, em que passos de tempo pequenos
levam a muitos passos a serem simulados, o tempo total de processamento de um método no
- 69 -
domínio da frequência também depende, para ambos os tipos de solveres, da taxa de
amostragem da faixa de frequências de interesse [36].
5.6.1. MoM-MLFMM
O MoM discretiza apenas a superfície dos dispositivos ao invés de todo o volume.
Demonstra vantagens caso a estrutura seja predominantemente metálica, eletricamente
compacta, e preferencialmente pequena quando comparada com o domínio de cálculo, uma
vez que o espaço livre não precisa ser modelado. Tipicamente, é um método que utiliza a
memória de modo intensivo, devido a matriz do sistema ser totalmente preenchida, e não
parcialmente preenchida, como no método FIT. Uma vez que todas as informações dos
elementos precisam ser armazenadas, a faixa para aplicações práticas é normalmente limitada
a estruturas geometricamente simples [48]. A função de Green do problema em particular
trata de obter os campos a partir da malha superficial [54].
Uma extensão importante do uso do MoM é o Método Multipolar Rápido Multinível, que
permite a simulação de estruturas eletricamente muito grandes, tais como aviões ou antenas
em navios. Utilizando a mesma discretização que o MoM, esta extensão diminui o
armazenamento de informações agrupando elementos juntos. No entanto, este método
somente é vantajoso para frequências muito elevadas [55]. O MoM gera sempre matrizes não
esparsas, assim exigindo grande esforço computacional para a inversão. O MLFMM permite
o acoplamento entre células apenas dentro de certas distâncias, assim produzindo matrizes
esparsas, cujo processo de inversão é mais simples.
5.7. ASPECTOS IMPORTANTES DA SIMULAÇÃO
Provavelmente as duas questões mais importantes que um usuário de uma ferramenta de
simulação se pergunta são:
i.
Quão exata é a minha simulação?
ii.
Quanto tempo levará para alcançar uma solução exata?
- 70 -
Para obter-se uma solução numérica exata, existem alguns aspectos a serem considerados:
i.
modelar a realidade corretamente;
ii.
assegurar que a malha é refinada o suficiente;
iii.
assegurar que a solução do sistema discretizado de equações é numericamente exato.
5.7.1. Modelagem da Realidade
Nas seções seguintes são discutidos quatro aspectos fundamentais na modelagem:
excitação, condições de contorno, propriedade dos materiais e pontos de medições.
5.7.1.1. Excitação
Os modelos eletromagnéticos normalmente podem ser excitados de três modos diferentes:
através de portas discretas, de portas de guia de ondas ou de ondas planas. Para excitar os
modos de propagação desejados no dispositivo, as portas precisam ser definidas nos locais em
que, na realidade, as fontes de sinais a serem irradiados serão conectadas. Isto é geralmente
em algum ponto ao longo de uma linha de transmissão (guia de onda, microstrip, etc.),
embora a melhor opção deva ser sempre aplicada de acordo com as características de cada
caso. A primeira regra para uma simulação exata é não iniciar uma simulação antes de
verificar se as configurações das portas são as ideais para o problema considerado.
Portas Discretas
Uma porta discreta é simplesmente uma representação do circuito equivalente de uma
fonte de tensão ou de corrente, possivelmente com impedância ou admitância interna diferente
de zero. Existe a possibilidade de escolha entre dois tipos de portas discretas, uma simples
conexão entre dois pontos ou uma distribuição sobre uma face. Em uma porta discreta entre
dois pontos, a fonte é conectada através de um condutor elétrico perfeito (PEC), isto é, sem
perdas, entre dois pontos distintos do dispositivo. Portas longas de conexão entre dois pontos
podem influenciar fortemente na solução, devido à indutância do cabo, que aumenta de forma
linear com o aumento do comprimento do cabo. Para reduzir a indutância parasita desta porta
discreta, pode-se utilizar como alternativa a porta de face discreta, que distribui o sinal ao
longo de uma área escolhida e não mais sobre uma linha, melhorando o resultado.
Neste trabalho, a porta discreta entre dois pontos foi utilizada para excitar a antena
bicônica utilizada na simulação entre 30 MHz e 100 MHz, conforme mostrada na Figura 5.10.
- 71 -
Figura 5.10 – Porta discreta entre dois pontos utilizada para excitar a antena bicônica
A porta discreta utilizada é do tipo Parâmetro S, que é modelada por um circuito
equivalente constituído de uma fonte de potência, com uma impedância interna (Zin = 50 Ω),
que excita e absorve energia, conforme mostrada na Figura 5.11 [5]. O sinal é injetado
somente na célula da malha em que a parte central da porta está localizada (representada pelo
cone vermelho na Figura 5.10). Esta porta é perfeitamente conectada ao longo das arestas da
malha entre os pontos finais definidos (representada pela linha azul no quadro superior a
direita da Figura 5.10). Ao longo da linha, a corrente se comporta como um simples fio, com
indutância associada se for longo, isso significa que em um determinado momento a
amplitude da corrente pode variar ao longo desta linha. Se for necessário um modelo muito
preciso da conexão elétrica, é recomendável manter o comprimento da linha da porta bem
menor que o comprimento de onda de interesse, e modelar a conexão elétrica por meio de
componentes que representem a realidade. Este tipo de porta discreta contém uma
alimentação de entrada padrão de 1 W e permite o cálculo do parâmetro S correspondente,
com base nos sinais de tempo de entrada e saída. Além disso, é possível monitorar a tensão e
a corrente através da porta discreta. A orientação da porta discreta é utilizada para determinar
a fase dos parâmetros S.
- 72 -
Figura 5.11 – Diagrama do circuito equivalente de uma porta discreta do tipo Parâmetro S [5]
O sinal de excitação utilizado na maior parte das simulações deste trabalho foi o pulso
gaussiano. Para definir uma função de excitação gaussiana, uma faixa de frequências
(Fmin, Fmax) deve ser especificada. Para a faixa de frequências de 15 MHz a 120 MHz, tem-se
o pulso gaussiano mostrado na Figura 5.12, que foi aplicado na porta discreta da antena
bicônica descrita anteriormente.
Figura 5.12 – Excitação gaussiana para a faixa frequências de 15 MHz a 120 MHz
Foram realizadas simulações da antena bicônica apresentada na Figura 5.10 utilizando-se
as metodologias MLFMM e FIT, pertencentes aos solveres I e T respectivamente, a título de
estudo para comparação de resultados do parâmetro S11 entre os métodos. Os resultados são
apresentados na Figura 5.13. No que diz respeito ao tempo de simulação, foi constatado que
houve uma significativa diferença entre os métodos de cálculos citados, sendo que o solver I
levou 10 minutos (considerando uma malha composta de 184 superfícies – Figura 5.14),
enquanto que o solver T levou 1 hora (considerando uma malha composta de 4,5 milhões de
- 73 -
células hexaédricas – Figura 5.15). Com relação aos resultados, nota-se que as curvas
possuem comportamentos similares, porém a magnitude dos sinais apresentam divergências
entre 40 MHz e 80 MHz, considerando-se apenas significativa a faixa de operação de 30 MHz
a 100 MHz utilizada na simulação do modelo do veículo. Nos resultados obtidos pelo solver T
(curva azul) verifica-se que parte dos resultados encontram-se acima dos -10 dB
(recomendado para um eficiente funcionamento da antena [5]), entretanto esse fato não se
mostrou ser um problema visto os resultados simulados a serem apresentados no Capítulo 6.2.
Figura 5.13 - Resultados do parâmetro S11 entre os métodos MLFMM (solver I) e FIT (solver T)
Figura 5.14 – Malha da antena bicônica utilizada no método MLFMM (solver I) - malha de superfície
- 74 -
Figura 5.15 - Malha da antena bicônica utilizada no método FIT (solver T) – malha hexaédrica
Porta de Guia de Ondas (Waveguide)
As portas discretas sempre introduzem uma pequena perturbação no campo EM
numericamente calculado nos locais onde são colocadas no modelo. Para eliminar
completamente essa perturbação, pode-se imaginar estender a linha de transmissão excitada
para o infinito, evitando assim o surgimento de quaisquer reflexões. Naturalmente que
nenhuma estrutura infinita pode ser modelada numericamente, e assim, um tipo especial de
porta, chamada de porta de guia de ondas (waveguide), foi introduzido como um meio de
truncar a linha infinita, sem introduzir quaisquer perturbações [36].
Uma porta de guia de ondas é uma superfície perpendicular a uma linha de transmissão,
na qual os modos de propagação do campo EM que podem propagar ao longo da linha de
transmissão são calculados. Neste trabalho, a porta waveguide foi utilizada para excitar a
antena DRG horn nas simulações, conforme mostrada na Figura 5.16. Os padrões de campo
correspondentes a estes modos são então utilizados como excitação durante a simulação.
- 75 -
Figura 5.16 – Excitação da antena DRG através da porta de guia de onda
Portas waveguide representam um tipo especial de condição de contorno do domínio de
cálculo, permitindo a excitação, bem como a absorção de energia. Este tipo de porta simula
um guia de onda infinitamente longo conectado à estrutura. Os modos do guia de onda viajam
para fora da estrutura em relação aos planos de contorno deixando, assim, o domínio de
cálculo com níveis muito baixos de reflexões. Reflexões muito baixas podem ser atingidas
quando os padrões de modo do guia de ondas na porta casam perfeitamente com os padrões
de modo do guia de ondas de dentro da estrutura. O CST-MWS [5] utiliza o solver
Eigenmode 2D para calcular os modos da porta waveguide. Este procedimento pode fornecer
níveis muito baixos de reflexão, abaixo de -100 dB em alguns casos [5].
Em geral, a definição de uma porta waveguide requer envolver o domínio do campo EM
inteiramente preenchido na secção transversal da linha de transmissão, com a área da porta. O
solver Eigenmode 2D pode, então, calcular os modos da porta exatos dentro dos limites. As
estratégias para definir adequadamente as portas de guia de ondas dependem do tipo de linha
de transmissão. O sinal de entrada de uma porta de guia de ondas excitado é normalizado por
uma fator de escala do sinal de entrada de 1 W de potência de pico [5], isto significa que a
porta de guia de ondas distribui a potência de entrada de 1 W de pico sobre a face inteira da
porta e assim a amplitude do campo EM em si muda com o tamanho desta área.
- 76 -
Utilizando-se as configurações antena DRG horn da Figura 5.16, foram realizadas
simulações utilizando-se as metodologias FIT e TLM, pertencentes ao solver T, a título de
estudo para comparação dos resultados do parâmetro S11 entre os métodos. Os resultados são
apresentados na Figura 5.17. No que diz respeito ao tempo de simulação, foi constatado que
não houve influência significativa entre os métodos citados para este modelo, ficando ambos
próximos de 8 minutos, (considerando uma malha composta 1,46 milhões de células
hexaédricas para o solver FIT - Figura 5.18, e 205,88 milhões de células hexaédricas para o
solver TLM - Figura 5.19). Com relação às curvas apresentadas na Figura 5.17, verifica-se
que ambas ficam abaixo de -10 dB durante praticamente toda faixa de frequência de 100 MHz
a 1 GHz que será utilizada na simulação do modelo do veículo, o que é satisfatório para esta
aplicação. Nota-se que as curvas possuem comportamentos similares, e que as amplitudes dos
sinais possuem divergências pontuais acentuadas, mas que ao longo da frequência as curvas
apresentam resultados próximos.
Figura 5.17 – Resultados do parâmetro S11 entre os métodos FIT e TLM
- 77 -
Figura 5.18 – Malha da antena DRG utilizada no método FIT (1,46 milhões de células hexaédricas)
Figura 5.19 – Malha da antena DRG utilizada no método TLM (205,88 milhões de células hexaédricas)
- 78 -
Ondas Planas
Na física de propagação das ondas, uma onda plana é uma onda de frequência constante,
cujas frentes de ondas (superfícies de fase constante) são planos paralelos infinitos de
amplitudes constante normais à fase do vetor velocidade, conforme mostrado na Figura 5.20.
Figura 5.20 – Frentes de ondas de uma onda plana viajando no espaço [56]
Não é possível na prática obter-se uma onda plana perfeita, somente uma onda plana de
extensão infinita irá propagar-se como uma onda plana. No entanto muitas ondas são
aproximadamente ondas planas em uma região localizada do espaço [56]. Uma fonte
localizada, tal como uma antena, produz um campo que é aproximadamente uma onda plana
em uma região mais afastada desta antena, em sua região de campo distante (Apêndice A),
como apresentado na Figura 5.21.
Figura 5.21 – Comportamento da frente de onda ao longo do espaço de um sinal irradiado por uma fonte
localizada, cujo campo que é aproximadamente uma onda plana em sua região de campo distante
Dentro do ambiente de simulação do CST-MWS [5], a excitação por onda plana considera
uma fonte no infinito e a polarização (linear/circular/elíptica) é arbitrária e escolhida pelo
usuário, sendo neste trabalho selecionada a polarização linear vertical, seguindo a polarização
das antenas utilizadas nos testes físicos.
Ao contrário de simulações utilizando-se portas discretas ou portas de guia de onda,
nenhum dos parâmetros S será calculado como resultado. Ao invés disso, a amplitude dos
- 79 -
campos é registrada. Para extrair informações, devem-se especificar pontas de prova ou
diferentes tipos de monitores de campo [5].
Na simulação do teste de EMC para a faixa de frequência de 1,5 MHz a 30 MHz, que
envolve o teste que utiliza a antena stripline, foi utilizado ondas planas em substituição ao
modelo dessa antena, conforme mostrada na Figura 5.22, devido à dificuldade de sua
modelagem. Neste caso, a utilização de ondas planas desconsidera eventuais distorções que
podem aparecer no padrão de irradiação da antena stripline, modelando assim o farfield ideal.
Figura 5.22 – Utilização da onda plana em substituição a antena stripline
Na simulação da faixa de frequência de 1 GHz a 2 GHz, que envolve o teste que utiliza a
antena horn, foi utilizado ondas planas em substituição ao modelo dessa antena, conforme
mostrada na Figura 5.23, devido às limitações computacionais impostas. Esta simulação exige
uma configuração de hardware com maior capacidade de memória e processamento que a
disponível (12 GB RAM e processador Intel Xeon W3550 de 3,06 GHz), para que o tempo de
simulação fique dentro de patamares viáveis. Simulações que utilizam modelos de antenas
demandam um tempo de processamento maior quando comparadas às ondas planas por
exigirem um número maior de células de malha, devido a um volume espacial maior e a uma
malha mais refinada na região da antena, ao passo que as ondas planas não necessitam de tais
exigências. A simulação, neste caso, torna-se ainda mais extensa por se tratar de uma larga
faixa de frequência (1 GHz). Os tempos de simulação serão apresentados em seções
posteriores com maiores detalhes.
- 80 -
Figura 5.23 – Utilização da onda plana em substituição a antena horn
5.7 1.2. Condições de Contorno
Como mencionado, o domínio da simulação, que é infinito no ambiente real, deve ser
truncado a fim de poder ser simulado em um ambiente computacional. Assim, nos limites da
simulação, condições de contorno especiais devem ser impostas, dependendo das condições
de operação reais do dispositivo. Por exemplo, se o dispositivo que necessita ser simulado é
colocado dentro de uma caixa metálica no ambiente real, então as condições de contorno
elétricas (que impõem um campo elétrico tangencial zero, tal como para um objeto metálico
perfeito) podem ser utilizadas em todos os lados deste contorno. Um plano de terra
infinitamente estendido também pode ser modelado por uma condição de contorno
elétrica [36].
Se uma estrutura é colocada em um ambiente aberto, tal como uma antena, então uma
condição de contorno absorvente (ABC) é o modo correto para truncar este ambiente. Uma
ABC simula a imperturbável propagação das ondas EM através deste contorno. Ao escolher o
truncamento do domínio, é necessário adicionar algum espaço livre em torno da antena para
não causar influência na acurácia da simulação. A técnica de contorno denominada de
camadas perfeitamente casadas (PML) [50] requer apenas uma fração do comprimento de
onda de espaço adicional, enquanto outras técnicas de ABC muitas vezes precisam de mais do
que um comprimento de onda. A ABC deve ser utilizada apenas quando necessário, uma vez
- 81 -
que normalmente requer mais recursos de computação do que, por exemplo, as condições de
contornos elétricas [36].
No CST-MWS [5], dentre as opções disponíveis, tem-se a ABC ‘O’ (open), que é uma
PML que funciona como o espaço livre, onde as ondas EM podem passar deste limite, com
reflexos mínimos. Também a ABC ‘OA’ (open – add space), que é uma PML igual ao ‘O’,
mas que adiciona algum espaço extra ao cálculo do campo distante, sendo esta opção
recomendada para os problemas de antenas. Já a condição de contorno elétrica (Et = 0 V/m)
funciona como um condutor elétrico perfeito, onde todos os campos elétricos tangenciais e
fluxos magnéticos normais são definidos como zero [5].
No presente trabalho foram utilizadas condições de contornos no intuito de modelar a
câmara semi-anecóica utilizada em todos os testes de EMC simulados. Foram utilizadas nas
superfícies laterais e na superior o contorno de espaço livre ‘OA’, e na superfície inferior o
contorno elétrico (Et = 0 V/m), conforme mostrado na Figura 5.24.
Figura 5.24 – Condições de contorno em substituição ao modelo da câmara semi-anecóica
5.7.1.3. Propriedades dos Materiais
Os valores específicos de permissividade (ε), permeabilidade (µ) e condutividade elétrica
(σ) de todos os materiais presentes no modelo, naturalmente, desempenham um papel
importante na exatidão da solução da simulação. Muitas vezes, esses valores são dependentes
- 82 -
da frequência (materiais dispersivos), e quanto mais fielmente esta dependência da frequência
for conhecida e descrita no modelo, mais correlato o resultado poderá ser com as medidas.
Solveres no domínio do tempo e da frequência podem manipular essa dependência da
frequência de modo eficiente [36].
No presente trabalho foram considerados três diferentes classes de materiais: 1) os
metálicos, 2) os polímeros, e 3) os vidros, conforme mostrado na Figura 5.25. Foram
atribuídos valores constantes de ε, µ e σ para cada classe de material conforme apresentados
na Tabela 5.1.
Figura 5.25 – Diferentes classes de materiais atribuídos às partes do veículo
- 83 -
Classe do Material
Permissividade
Relativa - ε
Permeabilidade
Relativa - µ
Condutividade
Elétrica - σ (S/m)
Metálicos
-
-
∞
Polímeros
3.40
1
-
Vidros
4.82
1
-
Tabela 5.1 – Propriedades dos materiais atribuídos às partes do veículo
Os materiais metálicos foram considerados como condutores elétricos perfeitos, e
compõem basicamente toda a parte estrutural, ou seja, a carroceria, além de outros
componentes, como as rodas, e algumas partes internas do painel do veículo. O PEC, por não
possuir perdas (funcionando como um supercondutor), possui skin depth nula – a corrente
circula apenas nas superfícies dos materiais. Devido a isso não há necessidade de associar
espessuras às folhas de metal, uma vez que a corrente circula apenas na periferia. Isso é válido
para a faixa de micro-ondas, não para frequências baixas (ordem de kHz).
Todos os tipos de polímeros foram agrupados em uma classe única de materiais, reunindo
os plásticos e as borrachas, onde foram incluídos os para-choques, os pneus, os faróis e as
lanternas, a grade frontal e o painel interno. Finalmente os vidros do carro foram designados
em uma classe de materiais específica, onde se incluem o para-brisa, e os vidros laterais e o
traseiro. Os materiais dielétricos citados foram considerados sem suas respectivas perdas.
5.7.1.4. Pontos de Medição
As pontas de prova são utilizadas para monitorar e gravar um componente particular do
campo eletromagnético em um ponto particular. As pontas de prova podem ser alocadas em
pontos de medições localizados dentro ou fora do domínio de cálculo, sendo que as utilizadas
fora deste domínio são pontos de medição de campo distante no domínio do tempo. O
resultado primário gerado é um sinal no tempo para ambos os tipos de pontas de prova. Este
sinal no tempo é utilizado para calcular automaticamente os resultados no domínio da
frequência através da utilização da transformada de Fourier [5].
Os resultados da transformada de Fourier serão normalizados de tal forma que a potência
de entrada é normalizada a 1 W em cada ponto da faixa de frequências. Com esta
normalização, os dados no domínio da frequência podem ser considerados como sendo uma
- 84 -
função de transferência entre a porta de excitação e o campo eletromagnético na posição e
orientação da ponta de prova. De qualquer modo, no caso de portas discretas, bem como em
excitação por ondas planas, os dados resultantes serão correspondentes à amplitude de
excitação definida pelo usuário [5].
De acordo com o relatório de resultados dos testes de EMC emitido pelo INPE [30] que
será utilizado neste trabalho para estudo de correlação, tem-se que o ponto de medição do
campo elétrico está localizado acima do painel de instrumentos do veículo, conforme
mostrado pelo ponto vermelho formado pela intersecção dos eixos inseridos na Figura 5.26.
Definir o local correto da ponta de prova na modelagem referenciando o ensaio físico é um
dos pontos fundamentais para garantir a correlação de resultados.
Figura 5.26 – Localização do ponto de medição utilizado no modelo para as simulações
- 85 -
5.7.2. Especificando a Malha da Estrutura
Quão refinada precisa ser a malha? Em primeiro lugar, a malha deve ser refinada o
suficiente para representar corretamente a geometria. Em segundo lugar, esta deve também
ser suficientemente refinada para representar as possíveis variações bruscas do campo dentro
do dispositivo [36].
Na maioria dos simuladores no domínio do tempo, a malha hexaédrica utilizada conduz a
uma representação staircase dos contornos da geometria, de modo que a malha precisa ser
muito refinada de forma a garantir uma boa representação da geometria, como mostrada na
Figura 5.27.(a). Técnicas avançadas de conformação de malhas eliminam essa desvantagem
pela utilização de uma malha hexaédrica eficiente, aplicada em quase todo o modelo, e
algoritmos especiais em conformação para os contornos curvos nas interfaces entre diferentes
materiais, como mostrada na Figura 5.27.(b). Desta forma, uma considerável economia em
termos de número de células de malha pode ser alcançada. De modo geral, as malhas
tetraédricas também podem, a princípio, oferecer uma boa aproximação da geometria, mas
isto só é verdade se a estrutura real for gradeada, alguns algoritmos de criação de malhas
exigem a segmentação de estruturas curvas que, finalmente, levam a aproximação poligonal
das curvaturas, como mostrada na Figura 5.27.(c) [36].
(a)
(b)
....(c)
Figura 5.27. Exemplo de malhas hexaédricas e tetraédricas em um pedaço de cabo coaxial [36].
A Figura 5.27 ressalta que: em (a) a malha staircase proporciona uma descrição
simplificada de superfícies curvas, a menos que uma malha muito fina seja utilizada; em (b) a
aproximação dos contornos por conformação garante a exatidão geométrica requerida, com
um mínimo de células de malha; em (c) geradores de malha tetraédrica, muitas vezes, exigem
uma segmentação de estruturas curvilíneas, conduzindo a uma aproximação simplificada da
geometria.
- 86 -
Como já mencionado, nas simulações a serem apresentadas neste trabalho optou-se pelo
EFPBA para garantir o melhor resultado possível, conforme mostrado na Figura 5.28.
Figura 5.28 - Aproximação da geometria do modelo do veículo pelo método EFPBA (grades nos planos XYZ)
Representar as variações do campo na malha é um problema ainda mais complicado. A
primeira regra que pode ser aplicada, antes que qualquer simulação seja iniciada, é que em
uma simulação no domínio do tempo com malha hexaédrica, o tamanho de uma célula da
malha nunca deve ser maior do que λ/8, onde λ é o comprimento de onda correspondente ao
limite superior da faixa de frequências de interesse [36]. Tamanhos de células de malha de
λ/10 ou λ/15 são frequentemente utilizados com êxito na prática. Para solveres FEM no
domínio da frequência baseados em elementos finitos de segunda ordem, λ/4 é um bom valor
para começar. Usualmente, um modelo é tipicamente composto de vários materiais, e assim,
uma vez que o comprimento de onda é dependente das propriedades do material, o tamanho
- 87 -
de cada célula depende do material do qual é preenchido. É por isso que programas que
permitem apenas uma malha uniforme (o mesmo tamanho de célula da malha em qualquer
lugar) podem conduzir a um número desnecessariamente grande de células de malha [36].
A acurácia de um resultado de simulação deve ser testada através de um estudo de
convergência. Em um estudo de convergência o número de células da malha é continuamente
aumentado até que os resultados de interesse, normalmente parâmetros S, não se alterem mais,
ou pelo menos não de forma significativa. Um estudo de convergência é então uma parte
essencial de qualquer projeto de simulação [36].
Para a antena bicônica da Figura 5.10 foram simulados, a título de comparação, três
cenários contemplando diferentes tamanhos de células na faixa de frequências de 15 MHz a
120 MHz, para verificar-se a influência deste parâmetro na simulação. Considerando-se o
limite superior da faixa de frequências, foi ajustado o parâmetro do CST-MWS [5] de linhas
por comprimento de onda (lpco) em 30, 40 e 50, controlando-se assim, a densidade da malha
na simulação, sendo obtidos os resultados conforme mostrado na Figura 5.29.
Figura 5.29 – Resultados do parâmetro S11 entre diferentes números de linhas por comprimento de onda (lpco)
A Tabela 5.2 mostra a quantidade de células de malha gerada a partir do valor de entrada
de linhas por comprimento de onda e o respectivo tempo de processamento da simulação.
- 88 -
Linhas por Comprimento
de Onda
Quantidade de Células de
Malha Gerada
Tempo de Simulação
30 (curva verde)
4,4 milhões
17 min
40 (curva azul)
10,8 milhões
1h35min
50 (curva vermelha)
20,5 milhões
1h55min
Tabela 5.2 – Comparativo do tempo de simulação de acordo com o número de lpco para a antena bicônica
A comparação mostra que o aumento do número de células por comprimento de onda tem
enorme influência no tempo de simulação, mesmo envolvendo uma estrutura simples como o
modelo da antena bicônica apresentada, embora os resultados ao longo da frequência não
tenham variado significativamente. Para casos típicos como este, deve-se ponderar o quanto a
variação dos resultados é importante versus o esforço computacional.
Sobre as variações bruscas de campo, devido às características geométricas, tais como
bordas, cantos e furos, há duas maneiras de representá-las na malha. A solução a priori
utilizada por softwares de simulação de EMC é detectar automaticamente essas características
e utilizar algoritmos avançados de correção durante a simulação. A outra maneira é aumentar
a densidade da malha a posteriori pela chamada malha adaptativa, o que será discutido em
seção posterior. Essas abordagens são aplicáveis tanto no domínio do tempo quanto da
frequência [36].
Todos os softwares de simulação EM, como o CST-MWS [5], possuem a capacidade de
gerar as malhas automaticamente, sendo possível sempre ao usuário alterar os parâmetros de
acordo com seus requisitos, mas a priori o software é capaz de realizar esta operação de modo
autônomo. O tamanho final da malha pode ser otimizado a partir de um número mínimo como
informação de entrada, e assim, reduzir-se o tempo de processamento global. Programas de
simulação avançados devem ser capazes de realizar estes dois passos: 1) gerar uma malha
inicial, de acordo com uma entrada mínima do usuário (por exemplo, número de linhas por
comprimento de onda), tendo em conta a geometria, as propriedades dos materiais, e cantos
pontiagudos e bordas, e 2) refinar a malha através de uma adaptação automática de malhas,
até que a convergência seja atingida.
- 89 -
5.7.3. Acurácia
5.7.3.1. Adaptação da Malha e Convergência
Embora os estudos de convergência e adaptação de malha pareçam ser abordagens muito
semelhantes para garantir resultados correlatos, na prática essas são diferentes. Para um
estudo de convergência, assume-se que a aproximação da geometria da estrutura, bem como
os resultados em toda a faixa de frequências de interesse, são melhorados, de forma contínua,
com o refinamento da malha [36].
Solveres no domínio da frequência realizam a adaptação da malha por padrão para a maior
frequência da faixa de interesse, embora esta frequência possa também ser definida pelo
usuário no CST-MWS [5]. A frequência mais alta, por exemplo, em relação aos filtros, não
necessariamente é aquela mais relevante para a funcionalidade do dispositivo. A frequência
mais relevante deve ser escolhida para adaptação da malha. Esta informação confiável é
disponível apenas a posteriori. Além disso, a distribuição do campo pode mudar
significativamente com a frequência, por exemplo, em multiplexadores ou antenas de
múltiplas bandas. Uma adaptação de frequência única, não é suficiente neste caso. Ou a
simulação deve ser dividida em várias faixas de frequências separadas, ou várias frequências
de adaptação devem ser utilizadas em mais de uma simulação sobre toda a banda [36].
A fim de obter resultados correlatos de simulação, a representação da geometria da
estrutura deve ser tão boa quanto possível. Particularmente solveres no domínio da frequência
baseados em tetraedros geralmente não melhoram a aproximação da geometria durante a
adaptação da malha. No processo de adaptação de malha, os tetraedros iniciais são
simplesmente subdivididos, a fim de melhorar a amostragem do campo [36].
Em contraste com o domínio da frequência, as abordagens no domínio do tempo podem
executar a adaptação de malha em banda larga. Além disso, cada refinamento implica também
em uma melhor aproximação da geometria, uma vez que todo o processo de malha é
reiniciado a cada passo da adaptação da malha [36].
Finalmente, deve ser mencionado que, ao contrário de uma malha tetraédrica, uma grade
volumétrica estruturada no domínio do tempo pode ser facilmente controlada pelo usuário,
através da manipulação das linhas da malha ou densidades das malhas. Assim, a malha final
de uma adaptação é quase reprodutível pelo usuário sem reexecutar a adaptação [36].
- 90 -
Para exemplificar as abordagens descritas, primeiramente foi simulado um teste de
convergência para o modelo da antena DRG horn da Figura 5.16, onde quatro cenários
contemplando diferentes tamanhos de células, para a faixa de frequências de 0 Hz a
1000 MHz, foram considerados para a constatação da convergência. Tomando-se o limite
superior da faixa de frequências como referência, foi ajustado o parâmetro de linhas por
comprimento de onda do CST-MWS [5] em 10, 15, 20 e 25, controlando-se assim, a
densidade da malha na simulação, sendo obtidos os resultados conforme mostrado na
Figura 5.30.
Figura 5.30 – Resultados de convergência do parâmetro S11 para a antena DRG horn
A Tabela 5.3 mostra a quantidade de células de malha gerada a partir do valor de entrada
de linhas por comprimento de onda e o respectivo tempo de processamento da simulação.
Linhas por Comprimento
de Onda
Quantidade de Células de
Malha Gerada
Tempo de Simulação
10 (curva vermelha)
1,46 milhões
7,5 min
15 (curva verde)
3,59 milhões
17 min
20 (curva rosa)
7,46 milhões
35 min
25 (curva azul)
13,16 milhões
1h4min
Tabela 5.3 – Comparativo do tempo de simulação de acordo com o número de lpco para a antena DRG
- 91 -
O aumento de lpco mostra que a partir de um determinado valor, 20 lpco neste caso,
haverá uma mínima influência deste parâmetro no comportamento da curva, ao passo que sua
influência no tempo de simulação será bastante significativa, que aproximadamente dobra a
cada aumento de 5 lpco. Assim, o estudo de convergência mostra que com a diferença entre as
curvas a partir de 20 lpco sendo mínima, aumentá-lo ainda mais não trará diferenças
significativas no resultado, e sim gerar esforços computacionais desnecessários.
Na sequência foi também simulado o modelo da antena DRG horn da Figura 5.16, agora
utilizando-se a função de adaptação automática da malha disponível no CST-MWS [5], para a
faixa de frequências de 0 Hz a 1000 MHz. Dois cenários, contemplando as técnicas PBA e
PBA+ADAPT, que inclui a adaptação automática, foram simulados para a comparação de
resultados, conforme mostrado na Figura 5.31.
Figura 5.31 – Resultados do parâmetro S11 entre as abordagens PBA e PBA com adaptação automática
A Tabela 5.4 mostra a quantidade de células de malha gerada a partir do valor de entrada
de linhas por comprimento de onda e o respectivo tempo de processamento da simulação.
- 92 -
Abordagem
Linhas por Comprimento
de Onda
Quantidade de Células
de Malha Gerada
Tempo de
Simulação
PBA padrão
10 (curva vermelha)
1,46 milhões
7,5 min
PBA + adaptação
automática
30 (curva azul) - ajustado
automaticamente
22,18 milhões
2h12min
Tabela 5.4 – Comparativo entre as abordagens PBA e PBA com adaptação automática para a antena DRG
Verifica-se que com a técnica de adaptação (PBA+ADAPT), o CST-MWS [5] busca a
solução mais exata possível, onde a partir do valor de lpco estipulado automaticamente não
haverá mudança no comportamento da curva, dentro do critério de erro estipulado, embora o
fator tempo neste caso não seja claramente ponderado. De modo geral, deve-se sempre
ponderar o quanto a variação dos resultados é importante versus o esforço computacional de
acordo com a fase do projeto.
5.7.3.2. Quanta Acurácia é Preciso?
A resposta para esta pergunta depende da finalidade da simulação, bem como a fase do
projeto. No início, o projeto está, provavelmente, ainda longe do ideal procurado, e não faz
sentido buscar uma solução excessivamente exata para uma variante de projeto que
provavelmente não será mantida até o final. Portanto, pode-se configurar a modelagem com
uma malha não tão refinada e assim finalizar a simulação em um menor tempo e com um
hardware de menor porte [36].
No final do desenvolvimento, quando se está perto do produto final, vale a pena investir
mais recursos e esforços na busca de uma resposta mais exata, modelando a malha mais
refinada e permitindo que os sinais no tempo decaiam totalmente a zero (em uma simulação
no domínio do tempo), ou então ajustar o critério de erro, para um sistema de equações
lineares, em um valor menor (em uma simulação no domínio da frequência). A verificação da
correlação de resultados de medições versus simulação requer ajustes de acurácia
maiores [36].
- 93 -
- 94 -
CAPÍTULO 6
RESULTADOS
Neste capítulo serão apresentados os melhores resultados encontrados para as simulações
do teste de imunidade a radiação veicular proposto por esse trabalho. Várias execuções,
envolvendo inúmeros parâmetros de modelagem e simulação, foram realizadas de modo a
obter-se um comportamento do campo elétrico simulado o mais próximo possível do teste
realizado pelo INPE [30], dentro das limitações deste trabalho.
As medições do teste de imunidade a radiação foram previamente executadas pelo INPE
em março de 2011, e portanto um ano antes da data de início desse trabalho.
Como mencionado, o teste físico é dividido em quatro faixas de frequências devido à
necessidade de utilizarem-se antenas diferentes para cada faixa, e por esta razão os resultados
das simulações também serão apresentados desta forma, pois irá facilitar a visualização e
análise do comportamento do campo elétrico da medição do teste versus a simulação.
Para todos os resultados a serem apresentados, tem-se que a escala do campo elétrico
(Sensor Level - V/m) utilizada no gráfico pertence à curva de medição do teste, em azul, não
representando os valores absolutos simulados, em vermelho. As curvas foram sobrepostas
para que sejam melhores visualizados o comportamento e a tendência do campo elétrico ao
longo da frequência. As medições do teste são feitas por amostragem de frequências, cujo
número é diferenciado para cada faixa de frequências, sendo assim representada por um
circulo azul ao redor do valor do campo elétrico medido.
Considerações gerais que valem para todos os resultados a serem apresentados são: i) as
reflexões que ocorrem devido ao teste ser realizado em uma câmara semi anecóica contribuem
em parte para a divergência de resultados, e ii) o veículo durante o teste encontra-se
energizado, porém com o motor desligado, o que também pode contribui para eventuais
divergências. Nas seções posteriores são apresentados os resultados do comportamento do
campo elétrico medidos versus simulados.
- 95 -
6.1. RESULTADOS DO COMPORTAMENTO DO CAMPO ELÉTRICO PARA A
FAIXA DE FREQUÊNCIAS DE 1,5 MHz A 30 MHz
A Figura 6.1 apresenta os ambientes do teste de EMC realizado pelo INPE [30] e da
respectiva simulação eletromagnética, para o teste de imunidade à radiação em alta frequência
(HF) na faixa de 1,5 MHz a 30 MHz.
Figura 6.1 – Ambientes de teste e simulação de EMC para a faixa de frequências de 1,5 MHz a 30 MHz
- 96 -
A Figura 6.2 apresenta os resultados do teste de EMC (curva azul) e da simulação EM
(curva vermelha) do comportamento linear do campo elétrico (V/m) ao longo da frequência
(Hz), para a configuração da Figura 6.1. Para esta configuração de teste, de acordo com os
requisitos adotados, foi aplicado um campo elétrico de amplitude constante de 100 V/m.
Figura 6.2 – Resultados do comportamento do campo elétrico na faixa de frequências de 1,5 MHz a 30 MHz
Foi utilizado nessa simulação, para o controle da densidade da malha hexaédrica do
modelo, o número de 200 linhas por comprimento de onda, que resultaram em 11,7 milhões
de células de malha e um respectivo tempo de simulação de 1h20min. Devido ao relativo
baixo tempo dessa simulação, quando comparado aos tempos de simulação das próximas
simulações (seções 6.2, 6.3 e 6.4), foi possível nesse caso utilizar um número de lpco superior
ao recomendado de 10 lpco, para se obter melhores resultados de convergência, sem que as
limitações impostas pelo hardware tornem-se relevantes.
Ao se sobrepor as curvas, verifica-se que o comportamento do campo elétrico simulado
possui correlação satisfatória quando comparada à medição realizada, evidenciado por uma
tendência de comportamento da curva de acompanhar a medição até próximo de 20 MHz,
mesmo seguido de uma diferença oscilatória acentuada em torno de 22 MHz, ainda assim
notam-se aclives e declives em instantes semelhantes de tempo.
- 97 -
Como mencionado, esse teste é fisicamente realizado com a utilização de uma antena
stripline, embora neste estudo tenha sido modelada através de uma onda plana, excitada pela
senoide gaussiana, por questões de simplificação (o fabricante da antena, por razões de
propriedade intelectual, preserva o desenho mecânico e elétrico do seu produto para evitar
cópias). Assim percebe-se que a utilização da onda plana inevitavelmente influencia na
acurácia da simulação, principalmente nas proximidades de 22 MHz onde encontra-se a maior
disparidade de resultados, juntamente com os aspectos intrínsecos como reflexões do teste e
simplificação do modelo veicular, também já mencionados.
- 98 -
6.2. RESULTADOS DO COMPORTAMENTO DO CAMPO ELÉTRICO PARA A
FAIXA DE FREQUÊNCIAS DE 30 MHz A 100 MHz
A Figura 6.3 apresenta os ambientes do teste de EMC realizado pelo INPE [30] e da
respectiva simulação eletromagnética, para o teste de imunidade à radiação em frequências de
VHF (frequências muito altas) na faixa de 30 MHz a 100 MHz.
Figura 6.3 – Ambientes de teste e simulação de EMC para a faixa de frequências de 30 MHz a 100 MHz
- 99 -
A Figura 6.4 apresenta os resultados do teste de EMC (curva azul) e da simulação EM
(curva vermelha) do comportamento linear do campo elétrico (V/m) ao longo da frequência
(Hz), para a configuração da Figura 6.3. Para esta configuração de teste, de acordo com os
requisitos adotados, foi aplicado um campo elétrico de amplitude constante de 70 V/m.
Figura 6.4 – Resultados do comportamento do campo elétrico na faixa de frequências de 30 MHz a 100 MHz
Foi utilizado nessa simulação, para o controle da densidade da malha hexaédrica do
modelo, o número de 80 linhas por comprimento de onda, que resultaram em 153 milhões de
células de malha e um respectivo tempo de simulação de 360 horas. A utilização do modelo
da antena bicônica eleva consideravelmente o número de células de malha e
consequentemente o tempo de simulação comparado ao da onda plana, que para a mesma
configuração utilizaria apenas cerca 8 milhões de células.
Ao se sobrepor as curvas, verifica-se que o comportamento do campo elétrico simulado
possui correlação irregular quando comparada à medição realizada. A sobreposição também
mostra uma tendência de comportamento similar até cerca de 60 MHz e acima de 80 MHz,
com aclives e declives em instantes semelhantes de tempo, porém entre 60 e 80 MHz verificase que diferenças oscilatórias mais significativas podem ser observadas.
- 100 -
Após a análise dos resultados, pode-se indicar alguns pontos como principais responsáveis
pelas divergências apresentadas, dentre os quais se destaca:
A modelagem semelhante da antena bicônica não refletiu o comportamento real
desejado nas frequências entre 60 e 80 MHz, onde houve uma disparidade crítica dos
resultados. Pode-se observar vales nas curvas de S11 e ganho da antena bicônica na
região citada (delimitada em azul) mostradas na Figura 6.5, onde embora os valores de
S11 estejam melhores que os -10 dB recomendado, verifica-se também que os valores
de ganho encontram-se menores, levando os resultados a uma condição de não
uniformidade e descompasso nesta região comparado aos demais pontos da curva.
Figura 6.5 – Parâmetro S11 (dB) e Ganho (dBi) da antena bicônica simulada
- 101 -
Outros aspectos também podem influenciar o resultado, tais como:
A simplificação do modelo do veículo, que exclui alguns componentes como bancos,
chicotes elétricos, módulos, entre outros pormenores, conjuntamente com as
especificações das propriedades dos materiais metálicos e dielétricos definidos sem
perdas nesse trabalho;
As reflexões das ondas eletromagnéticas tanto no teste quanto no modelo, que podem
alterar significativamente os valores de campo medidos e simulados captados pelas
pontas de prova. Nota-se ainda que embora seja aplicado um campo elétrico de
70 V/m, o pico observado chega a atingir 150 V/m no ensaio proposto, fato que indica
a forte influência das reflexões das ondas eletromagnéticas nos resultados de testes;
O número de linhas por comprimento de onda definido na simulação, que embora
esteja com um valor acima do recomendado de 10 lpco, poderia ainda ter sido
aumentado para efeito de avaliação não fossem as limitações de hardware impostas
que gerar um alto tempo de processamento.
- 102 -
6.3. RESULTADOS DO COMPORTAMENTO DO CAMPO ELÉTRICO PARA A
FAIXA DE FREQUÊNCIAS DE 100 MHz A 1000 MHz
A Figura 6.6 apresenta os ambientes do teste de EMC realizado pelo INPE [30] e da
respectiva simulação eletromagnética, para o teste de imunidade à radiação na faixa de VHF e
ultra-alta (UHF) de 100 MHz a 1000 MHz.
Figura 6.6 – Ambientes de teste e simulação de EMC para a faixa de frequências de 100 MHz a 1 GHz
- 103 -
A Figura 6.7 apresenta os resultados do teste de EMC (curva azul) e da simulação EM
(curva vermelha) do comportamento linear do campo elétrico (V/m) ao longo da frequência
(Hz), para a configuração da Figura 6.6. Para esta configuração de teste, de acordo com os
requisitos adotados, foi aplicado um campo elétrico de amplitude constante de 70 V/m.
Figura 6.7 – Resultados do comportamento do campo elétrico na faixa de frequências de 100 MHz a 1 GHz
Foi utilizado nessa simulação, para o controle da densidade da malha hexaédrica do
modelo, o número de 10 linhas por comprimento de ondas que resultaram em 180 milhões de
células de malha e um respectivo tempo de simulação de 473 horas. A utilização do modelo
da antena DRG eleva consideravelmente o número de células de malha e consequentemente o
tempo de simulação comparado ao da onda plana, que para a mesma configuração utilizaria
apenas 6,1 milhões de células.
Ao se sobrepor as curvas, verifica-se que o comportamento do campo elétrico simulado
possui correlação irregular, mostrando uma tendência somente pontual do comportamento
simulado de seguir a medição realizada, apresentando divergências oscilatórias significativas
observadas ao longo de toda a faixa de frequência.
Após a análise dos resultados, pode-se indicar alguns pontos como principais responsáveis
pelas divergências apresentadas, dentre os quais se destaca:
- 104 -
A modelagem semelhante da antena DRG não refletiu o comportamento real desejado
na faixa de frequências especificada, contribuindo para as divergências oscilatórias do
resultado. Pode-se observar nas curvas de S11 e ganho da antena DRG mostradas na
Figura 6.8 que, embora os valores de S11 estejam melhores que os -10 dB
recomendado em toda a faixa de frequências especificada, até a frequência de
400 MHz não há um comportamento estável de S11 e ganho, o que leva a uma
irregularidade de resultados nesta região. Acima de 400 MHz é possível que o campo
distante da antena modelada não seja plenamente compatível com a utilizada no teste,
devido às aberturas nas laterais não consideradas no modelo.
Figura 6.8 – Parâmetro S11 (dB) e Ganho (dBi) da antena DRG simulada
- 105 -
Da mesma maneira que na simulação envolvendo a antena bicônica na seção 6.2, outros
aspectos também podem influenciar o resultado que envolve a antena DRG, tais como:
A simplificação do modelo do veículo, que exclui alguns componentes como bancos,
chicotes elétricos, módulos, entre outros pormenores, conjuntamente com as
especificações das propriedades dos materiais metálicos e dielétricos definidos sem
perdas nesse trabalho;
As reflexões das ondas eletromagnéticas tanto no teste quanto no modelo, que podem
alterar significativamente os valores de campo medidos e simulados captados pelas
pontas de prova. Nota-se ainda que embora seja aplicado um campo elétrico de
70 V/m, o pico observado chega a atingir 160 V/m no ensaio proposto, fato que indica
a forte influência das reflexões das ondas eletromagnéticas nos resultados de testes;
O número de linhas por comprimento de onda definido na simulação, que embora
esteja com o valor recomendado de 10 lpco, poderia ainda ter sido aumentado para
efeito de avaliação não fossem as limitações de hardware impostas que geram um alto
tempo de processamento.
- 106 -
6.4. RESULTADOS DO COMPORTAMENTO DO CAMPO ELÉTRICO PARA A
FAIXA DE FREQUÊNCIAS DE 1000 MHz A 2000 MHz
A Figura 6.9 apresenta os ambientes do teste de EMC realizado pelo INPE [30] e da
respectiva simulação eletromagnética, para o teste de imunidade à radiação na faixa de UHF
de 1000 MHz a 2000 MHz.
Figura 6.9 – Ambientes de teste e simulação de EMC para a faixa de frequências de 1 GHz a 2 GHz
- 107 -
A Figura 6.10 apresenta os resultados do teste de EMC (curva azul) e da simulação EM
(curva vermelha) do comportamento linear do campo elétrico (V/m) ao longo da frequência
(Hz), para a configuração da Figura 6.9. Para esta configuração de teste, de acordo com os
requisitos adotados, foi aplicado um campo elétrico de amplitude constante de 30 V/m.
Figura 6.10 – Resultados do comportamento do campo elétrico na faixa de frequências de 1 GHz a 2 GHz
Foi utilizado nessa simulação, para o controle da densidade da malha hexaédrica do
modelo, o número recomendado de 10 linhas por comprimento de onda, que resultaram em
45 milhões de células de malha e um respectivo tempo de simulação de 14h30min.
Ao se sobrepor as curvas, verifica-se que o comportamento do campo elétrico simulado
possui correlação irregular, mostrando uma tendência do comportamento simulado de seguir a
medição realizada, embora apresente divergências oscilatórias significativas que são
observadas ao longo de toda a faixa de frequência.
Como mencionado, esse teste é fisicamente realizado com a utilização de uma antena
horn, embora neste estudo tenha sido modelada através de uma onda plana, por questões de
limitações de hardware. Assim percebe-se que a utilização da onda plana inevitavelmente
influencia na acurácia da simulação, juntamente com aspectos como as reflexões do teste
(apresentando picos de 45 V/m nos resultados) e a simplificação do modelo veicular.
- 108 -
CAPÍTULO 7
CONCLUSÕES
A metodologia apresentada nesta dissertação descreveu a análise da modelagem e
simulação eletromagnética aplicadas a testes de compatibilidade eletromagnética em veículos.
Ressaltou-se os passos para a geração do modelo veicular e a configuração dos parâmetros
de simulação eletromagnética. Foi utilizada a Técnica de Integração Finita dentro do ambiente
do software CST-MWS para a execução das simulações de imunidade à radiação do modelo
veicular proposto, sendo então os resultados confrontados com os testes físicos previamente
efetuados pelo INPE para a faixa de frequência de 1,5 MHz a 2 GHz.
Essa abordagem estruturada no domínio do tempo teve a vantagem de gerar resultados
para uma determinada faixa de frequências em apenas uma execução do ciclo de resolução do
sistema numérico, assim reduziu-se o tempo de manipulação, configuração e simulação de
modelos, além de permitir a visualização e análise do comportamento eletromagnético com
mais clareza e objetividade ao se variar a frequência.
A despeito das dificuldades encontradas na modelagem das antenas e nos recursos
limitados de hardware, e considerando o objetivo principal de utilizar pré-testes virtuais para
limitar a execução de testes físicos somente ao final do desenvolvimento veicular para sua
certificação, foi observado apenas uma disparidade crítica na correlação entre simulação e
teste físico reportada nos resultados entre 60 e 80 MHz apresentados na seção 6.2, ao passo
que os demais resultados podem ser considerados aceitáveis dentro desse contexto, embora
tenha ficado claro que há espaço para melhoras principalmente na modelagem das antenas e
possivelmente também na câmera semi-anecóica definidas por condições de contornos.
Como contribuições provenientes deste trabalho, podem ser ressaltadas:
i.
Análise da simulação eletromagnética aplicada a veículos automotores visando
antever a performance de EMC veicular provendo aos engenheiros informações
que lhes garantam desenvolver o melhor produto já na fase inicial de projeto,
reduzindo assim o tempo de desenvolvimento e reengenharia, e consequentemente
levando a uma redução de custos em protótipos e testes de validação.
- 109 -
ii.
Análise da modelagem veicular e das antenas bicônicas e DRG tornando possível a
obtenção de melhores resultados no ambiente de simulação.
iii.
Contribuição ao processo de aprendizado de modelagem e simulação de EMC que,
embora haja um número relativamente grande de publicações nesta área, possui
pouca literatura direcionada a aplicação automotiva, não condizendo com a
importância do tema, visto que se trata de um item de alta criticidade na validação
elétrica veicular.
iv.
Compilação das diretivas e normas especificas de EMC para a área veicular.
Como sugestões para trabalhos futuros, podem ser indicadas:
i.
Investigar o quanto o aumento da representatividade dos modelos, tanto do veículo
quanto das antenas, irá influenciar nos resultados de campo elétrico quando
comparados aos apresentados neste trabalho.
ii.
Estudar a inclusão de elementos passivos, como cabeamentos ou peças estruturais,
e eventuais elementos ativos, como circuitos amplificadores de antenas ou PCB de
módulos, estendendo a análise eletromagnética para o conjunto funcional completo
do veículo.
iii.
Investigar a inclusão da modelagem da câmara semi-anecóica, através de seus
elementos absorventes, no ambiente de simulação.
- 110 -
REFERÊNCIAS BIBLIOGRÁFICAS
[1] Simulação e Projeto Multifísica – UFMG website, http://sistemas.eng.ufmg.br/curso.php
[2] Clayton R. Paul, “Eletromagnetismo para Engenheiros – com aplicações”. Editora LTC,
2004, pg. 14.
[3] Sameer Sisir K Das, “EMI Problems and EMC Standards for Automotive Vehicles”, SAE
India, 2003-28-0011, Janeiro 2003.
[4] S. Guttowski, S. Weber, E. Hoene, W. John, e H. Reichl, “EMC Issues in Cars with
Electric Drives”, Publicado por IEEE Automotive EMC Symposium, 2003.
[5] CST Computer Simulation Technology – CST website, disponível em:
http://www.cst.com/Content/Applications/Markets/EMC_EMI.aspx
[6] ISO, International Organization for Standardization. Disponível em:
http://www.iso.org/iso/home.html
[7] General Motors do Brasil. Disponível em: www.gm.com ou www.chevrolet.com.br
[8] Scott Stanton, e Ravenstahl, “Simulation-Driven Design for Hybrid and Electric
Vehicles”, http://www.ansys.com/staticassets/ANSYS/staticassets/resourcelibrary/article/AAV4-I1-Simulation-Driven-Design-for-Hybrid-and-Electric-Vehicles.pdf
[9] Sabine Marksell, “EMC Aspects of PWM Controlled Loads in Vehicles”. Dissertação de
Mestrado, 2004. Department of Industrial Electrical Engineering and Automation, Lund
University.
[10] P.A. Chatterton, M.A. Houlden, “EMC Electromagnetic Theory to Practical Design”,
John Wiley and Sons, West Sussex, England, 1992.
[11] H.W. Ott, “Noise Reduction Techniques in Electronic Systems”, Second edition, WileyInterscience, John Wiley and Sons, Inc., New York, United States of America, 1988.
[12] L. Tihanyi, “Electromagnetic Compatibility in Power Electronics”, ButterworthHeinemann, Oxford, United Kingdom, 1995.
[13] Made-in-China.com Store. Disponível em: http://www.made-in-china.com/
- 111 -
[14] IEC, International Electrotechnical Commission. Disponível em: http://www.iec.ch/
[15] European Commission, “CE marking”. Disponível em: http://ec.europa.eu/CEmarking
[16] T. Williams, “Measurement techniques and test methods: developments, costs and
options”, ERA Conference “EMC 94 – The Clock is Ticking- Countdown to Compliance”, 24
Feb. 1994, ERA Report 94-0092
[17] ESD Association, Rome, NY, “An Introduction to ESD”, Parte 1 de “Fundamentals of
Electrostatic Discharge”, 2010. Disponível em: http://www.esda.org/esd_fundamentals.html
[18] Wen-Jiao Liao, Baertlein, B.A., Gilmore, W., “The role of grounding in automotive
EMC”, IEEE International Symposium on Electromagnetic Compatibility, Seattle, WA, USA,
Agosto. 2-6, 1999, vol. 2 pg. 745-750.
[19]
T.
Jarvis,
“’e’
is
for
Automobile
Electronics”.
Disponível
em:
http://www.radiocad.co.uk/files/5413/6921/7109/AutoElectronics.pdf
[20] Dieter Frohlich, “Directive 2004/104/EC vs 95/54/EC”, Electromagnetic Interference and
Compatibility (INCEMIC), 2006 Proceedings of the 9th International Conference on IEEE.
[21] Juliano F. Mologni, Markus Kopp, Arnaud Colin, Marco A. R. Alves, e Edmundo S.
Braga, “Full Vehicle Electromagnetic Simulation using the Hybrid Finite Element Boundary
Integral Approach”. XX SAE Brazil International Congress and Exhibition, SP – 2011.
[22] Siemens Product Lifecycle Management Software Inc. Disponível em:
http://www.plm.automation.siemens.com/en_us/products/nx/
[23] Altair Engineering, Inc. Disponível em:
http://www.altairhyperworks.com/Product,7,HyperMesh.aspx
[24] Terence Rybak and Mark Steffka, “Automotive Electromagnetic Compatibility (EMC)”.
Kluwer Academic Publishers, 2004.
[25] Roland Gubish, “The Engineer’s Guide to Global EMC Requirements: 2007 Edition”.
Intertek White Paper, 2007. Disponível em:
http://www.ieee.li/pdf/essay/guide_to_global_emc_requirements_2007.pdf
- 112 -
[26] Conselho Nacional de Trânsito – CONTRAN. Disponível em:
http://www.denatran.gov.br/contran.htm
[27] Agência Nacional de Telecomunicações – ANATEL. Disponível em:
http://www.anatel.gov.br/Portal/exibirPortalInternet.do
[28] Federal Communications Commission - FCC. Disponível em: http://www.fcc.gov/
[29] Instituto Nacional de Metrologia, Qualidade e Tecnologia - INMETRO. Disponível em:
http://www.inmetro.gov.br/
[30] Instituto Nacional de Pesquisas Espaciais – INPE. Disponível em: http://www.inpe.br/
[31] Franciscus Jozua van Dam, “A stripline antenna for radiated immunity testing”,
Dissertação de Mestrado, University of Twente, 27-10-2011.
[32] Site ETS-Lindgren, disponível em: http://www.ets-lindgren.com/
[33] Site R&S Rohde&Schwarz, disponível em: http://www.rohde-schwarz.com/
[34] Site AR Inc, disponível em: http://www.ar-amps.com/
[35] Site Milmega, disponível em: http://www.milmega.co.uk/
[36] Thomas Weiland, Martin Timm, and Irina Munteanu, “A Practical Guide to 3-D
Simulation”, IEEE Microwave Magazine, pg 62-75, Dezembro 2008.
[37] C. H. Wilcox, “An Expansion Theorem for Electromagnetic Fields”, California Institute
of Technology, Communication on Pure and Applied Mathematics, vol. IX, 115-134 (1956).
[38] T.Weiland, “A discretization method for the solution of Maxwell’s equations for sixcomponent fields,” Electron. Commun. (AEÜ), vol. 31, no. 3, p. 116, 1977.
[39] T.Weiland, “Time domain electromagnetic field computation with finite difference
methods”, Int. J. Numer. Model, vol. 9, no. 4, pp. 295–319, 1996.
[40] K.S.Yee, “Numerical solution of initial boundary value problems involving Maxwell’s
equations in Isotropic media”, IEEE Antennas Propagat., vol. 14, no. 5, pp. 302–307, 1966.
- 113 -
[41] A. Taflove and S.C. Hagness, “Computational Electrodynamics: The Finite-Difference
Time-Domain Method”, 3rd ed. Norwood, MA: Artech House, 2005.
[42] F. Zheng, Z. Chen, and J. Zhang, “A finite-difference time-domain method without the
Courant stability conditions”, IEEE Microwave Guided Wave Lett., vol. 9, pp. 441-443,
1999.
[43] E.P. Li, I. Ahmed, and R. Vahldieck, “Numerical dispersion analysis with improved
LOD-FDTD method”, IEEE Microwave Wireless Components Lett., vol. 17, no. 5, pp. 319321, May 2007.
[44] P.B. Johns and R.L. Beurle, “Numerical solutions of 2-dimensional scattering problems
using a transmission-line matrix”, Proc. Inst. Elect. Eng., vol. 118, no. 9, pp. 1203–1208,
1971.
[45] C. Christopoulos, “The Transmission-Line Modeling Method: TLM”. Piscataway, NJ:
IEEE Press, 1995.
[46]
A.
Bossavit,
“Computational
Electromagnetism
Variational
Formulations,
Complementarity, Edge Elements”. New York: Academic Press, 1998.
[47] J. Jin, “The Finite Element Method in Electromagnetics”, 2nd ed. Piscataway, NJ: IEEE
Press, 2002.
[48] R.F. Harrington, “Field Computation by Moment Methods”. New York: Piscataway, NJ:
IEEE Press, 1993.
[49] MSC Software Corporation. Disponível em: http://www.mscsoftware.com/product/mscnastran
[50] J.P. Berenger, “A perfectly matched layer for the absorption of electromagnetic waves”,
J. Comput. Phys., vol. 114, no. 2, pp. 185–200, 1994.
[51] Antenna Magus. Disponível em: http://www.antennamagus.com/
[52] A. Taflove and M.E. Brodwin, “Numerical solution of steady-state electromagnetic
scattering problems using the time-dependent Maxwell’s equations”, IEEE Trans. Microwave
Theory Tech., vol. 23, pp. 623–630, Aug. 1975.
- 114 -
[53] B. Krietenstein, R. Schuhmann, P. Thoma, and T.Weiland, “The perfect boundary
approximation technique facing the challenge of high precision field computation”, in Proc.
XIX Int. Linear Accelerator Conf. (LINAC’98), Chicago, 1998, pp. 860–862.
[54] M. Sadiku, “Numerical Techniques in Electromagnetics”. Boca Raton, CRC Press, 1992.
[55] W.C. Chew, J.-M. Jin, E. Michielssen, and J. Song, “Fast and Efficient Algorithms in
Computational Electromagnetics”. Norwood, MA: Artech House, 2001.
[56] J. D. Jackson, “Classical Electrodynamics”. Wiley: New York, 1998.
[57] SpectrumWiki, 2013, “Radio Spectrum Allocation”. Disponível em:
http://www.spectrumwiki.com/wp/allocations101.pdf
- 115 -
- 116 -
APÊNDICE A
NEARFIELD AND FARFIELD (CAMPO PRÓXIMO E DISTANTE)
As características de um campo são determinadas pela fonte, o meio que envolve a fonte e
a distância entre a fonte e o ponto de observação [9]. Num ponto próximo da fonte, as
propriedades de campo são determinadas principalmente pelas características da fonte.
Distante da fonte, as propriedades do campo dependem principalmente do meio através do
qual o campo está propagando. Isto implica que o espaço em torno da fonte de radiação pode
ser dividido em duas regiões, o campo próximo e o distante (nearfield e farfield). Uma
aproximação comum é considerar as pequenas e grandes distâncias da fonte em comparação
com os comprimentos de onda da radiação. Assim, o ponto importante é ser capaz de
identificar a região de transição onde o nearfield "transforma-se” em farfield. Esta região de
transição pode ser encontrada olhando-se a impedância da onda, que é a razão entre o campo
elétrico, E, e o campo magnético, H. No campo distante esta razão E/H é igual à impedância
característica do meio selecionado (por exemplo, E/H = 377 Ω para o ar ou o espaço livre). A
região de transição é então encontrada a uma distância da fonte de radiação:
Uma vez que esta região é de transição, nearfield e farfield devem estar a alguma
distância a partir deste. Para efeito prático define-se que as regiões próximas e distantes
devem ser da ordem de magnitude maior ou menor do que esta distância de transição, isto é:
(
(
{
)
)
Muitos autores, contudo, frequentemente utilizam uma linha direta com base no valor de r:
{
- 117 -
Uma vez que esta definição envolve o comprimento de onda da radiação, esta torna-se
dependente da frequência, como demonstrado na Tabela A.1.
Frequência
30 kHz
3 MHz
1590 m
15,9 m
30 MHz
300 MHz
3 GHz
1,59 m
0,159 m
0,0159 m
Tabela A.1. Distâncias de transição de nearfield e farfield para diferentes frequências
Diferenças entre Nearfield e Farfield
Na região de nearfield os campos elétricos e magnéticos devem ser considerados
separadamente uma vez que a razão entre estes não é constante. A razão é determinada pelas
características da fonte e a distância a partir da fonte até onde o campo é observado. Se a fonte
possui alta corrente e baixa tensão, o nearfield é predominantemente magnético, isto é, E/H <
377 Ω. Por outro lado, se a fonte possui alta tensão e baixa corrente, o nearfield é
principalmente elétrico, isto é, E/H > 377 Ω.
Para uma antena de cabo linear, a impedância da fonte é alta. Este tipo de antena gera
principalmente campo elétrico, o que implica que a impedância de onda próxima da antena é
alta. À medida que a distância a partir da antena é aumentada, o campo elétrico perde parte de
sua intensidade, uma vez que gera um campo magnético complementar. A geração de um
campo magnético implica que a impedância da onda a partir de uma antena de cabo linear
diminui com a distância e assintoticamente aproxima-se da impedância de espaço livre no
campo distante. Este é um efeito a partir do fato que o campo elétrico de um dipolo elétrico
atenua a uma taxa de (1/r)3 (r = distância da fonte de radiação até o ponto onde o campo é
observado), enquanto que o campo magnético atenua a uma taxa de (1/r)2.
Quando um dipolo magnético, como uma antena em loop, é utilizado, o campo produzido
é principalmente magnético e a impedância de onda próxima à antena é baixa. À medida que a
distância da fonte aumenta, o campo magnético atenua a uma taxa de (1/r) 3 e o campo elétrico
a uma taxa de (1/r)2. Isto implica que a impedância da onda aumenta com a distância e
aproxima-se da impedância do espaço livre.
- 118 -
No farfield, a impedância de onda é constante. Isso significa que ambos os campos,
elétrico e magnético, atenuam à mesma taxa, (1/r). Os campos elétricos e magnéticos são
ortogonais no farfield, formando, assim, uma onda plana. A potência irradiada no farfield é
fortemente dependente da impedância de entrada da antena.
- 119 -
- 120 -
APÊNDICE B
LISTA DE FREQUÊNCIAS
Banda de Transmissão de Rádio
Frequência
(~ denota não contínuo ou aproximado)
Transmissão em AM
530 kHz – 1,75 MHz
Transmissão de TV
54 ~ 88,1 ; 174 – 216 ; 470 ~ 890 MHz
Transmissão em FM
86,6 – 109,1 MHz
Telefones celulares
~ 750, ~850, ~1700, ~1950, ~2100 MHz
Global Positioning System (GPS)
1567 – 1583 MHz
(não militar)
Rádio Digital via Satélite
2320 – 2345 MHz
Redes de computador wireless
2400 – 2500 MHz
(Bluetooth)
~ 5,8 GHz
TV via Satélite
~ 12 GHz
Links fixos ponto a ponto
~ 1, ~ 90 GHz
Tabela B.1 - Diferentes bandas de radiofrequência [57]
Banda de Frequência
Designação
Abreviação
3 – 30 kHz
Very Low Frequency
VLF
30 – 300 kHz
Low Frequency
LF
300 – 3,000 kHz
Medium Frequency
MF
3 – 30 MHz
High Frequency
HF
30 – 300 MHz
Very High Frequency
VHF
300 – 3,000 MHz
Ultra High Frequency
UHF
3 – 30 GHz
Super High Frequency
SHF
30 – 300 GHz
Extremely High Frequency
EHF
Tabela B.2 – Designação das diferentes bandas de radiofrequência [57]
- 121 -
- 122 -
APÊNDICE C
BANDA LARGA VS BANDA ESTREITA (BROADBAND VS NARROWBAND)
Em comunicações, banda refere-se a faixa de frequências (largura de banda) utilizado no
canal de comunicação. Dependendo do tamanho da banda (em termos de kHz, MHz ou GHz),
e algumas outras propriedades do canal, podem ser classificados como banda estreita, banda
larga, entre outros. Para aplicações em EMC os termos broadband e narrowband são os mais
comumente utilizados.
Banda Estreita (Narrowband)
No rádio, a comunicação de banda estreita acontece em uma faixa de frequências, em que
a resposta em frequência do canal de comunicação é plana, isto é, o ganho é constante para
toda a faixa frequências. Por consequência, a banda deve ser menor do que a largura de banda
de coerência (faixa máxima das frequências onde à resposta do canal é plana), e relativamente
menor do que a faixa de banda larga, onde a resposta do canal não é necessariamente plana.
Banda Larga (Broadband)
Em comunicações via rádio, a banda larga possui uma faixa de frequências maior em
comparação com a banda estreita. Normalmente, a faixa de banda larga ultrapassa a largura da
banda de coerência e, portanto, não possui uma resposta em frequência plana. A banda larga é
um termo relativo, e seu tamanho pode ser de kHz, MHz ou GHz, dependendo da aplicação.
- 123 -
- 124 -
APÊNDICE D
MEDIÇÕES DE PICO, QUASE-PICO E MÉDIA
Existem três tipos de detectores de uso comum em medições de emissões de rádio
frequência: pico, quase-pico e média. As características são diferentes para cada faixa de
frequências (ver Apêndice B) e são definidos na norma CISPR16.
Emissões de interferências são raramente contínuas em um nível fixo. Um sinal de
portadora, por exemplo, pode ser modulado em amplitude e ambas, portadora e emissões em
banda larga, podem ser pulsadas. Os três tipos de detectores fornecem diferentes níveis de
medidas, dependendo do sinal que for medido (Figura D.1) [16].
Figura D.1 – Medidas de Pico (P), Quase-Pico (QP) e Média (M) para diferentes sinais [16]
Pico (P)
Um detector de pico responde quase instantaneamente ao valor de pico do sinal e a
descargas. Se o receptor reside em uma única frequência, a saída do detector de picos irá
seguir o envelope do sinal (contorno aparente do sinal formado pelos sucessivos valores de
pico). Devido a esse comportamento às vezes é chamado de detector de envelope. Uma vez
- 125 -
que o detector de pico tem uma resposta muito rápida, é adequado para diagnósticos e testes
rápidos. As normas CISPR de emissões não requerem a utilização de detectores de picos.
Quase-Pico (QP)
O detector de quase-pico é um detector de pico com moderada carga e tempos de
descarga. Este detector foi desenvolvido e recomendado para uso comum pela CISPR uma
vez que foi observado que pela ponderação das constantes de tempo do detector de pico, uma
melhor correlação poderia ser encontrada entre as leituras do receptor EMI e as perturbações
de transmissão ouvidas pelo ouvido humano. Isto significa que os detectores de quase-pico
foram estabelecidos com referência ao ouvido humano. Foi notado que a interferência em
baixas frequências por repetição de pulso é subjetivamente menos irritante na recepção de
rádio que a interferência em altas frequências por repetição de pulso. Por consequência, um
tipo de emissão por pulsos será tratado de forma mais moderada por uma medição de quasepico do que por uma medição de pico. Uma desvantagem do detector de quase-pico é a
demora para obter-se um resultado exato, uma vez que a medição deve permanecer em cada
frequência por mais tempo do que os tempos de carga de quase-pico e de descarga. Uma vez
que a intenção dos testes baseados na CISPR historicamente tem sido a de proteger os
usuários de voz e dados do espectro de rádio, a CISPR coloca consideravelmente ênfase na
utilização do detector de quase-pico.
Média (M)
O detector de médias, como o seu nome indica, mede o valor médio do sinal. No caso em
que o sinal é contínuo, o detector de média medirá um valor igual ao detector de pico, mas
nos casos em que o sinal é pulsado ou modulado, o nível médio será inferior ao pico.
- 126 -