UD 3
ANÁLISE ESPACIAL
Conteúdo
• Introdução à análise espacial;
• Análises espaciais sobre dados matriciais;
• Análises espaciais sobre dados vetoriais.
Introdução à análise espacial
Tem
por
objetivo
mensurar
propriedades
e
relacionamentos, levando em conta, de forma explícita, a
localização espacial do fenômeno em estudo.
A finalidade é a identificação de um modelo inferencial
que considere explicitamente os relacionamentos espaciais
presentes no fenômeno.
Introdução à análise espacial
A estratégia de análise depende dos tipos de dados envolvidos na
formulação do problema:
• Eventos ou padrões pontuais: fenômenos expressos como ocorrências
de pontos localizados no espaço. Procede-se a análise da distribuição
espacial dos pontos, testando hipóteses sobre o padrão observado
(aleatório, em aglomerados ou regularmente distribuído).
• Superfícies contínuas: estimadas a partir de um conjunto de amostras
medidas in loco, em intervalos regulares ou irregulares. O objetivo é
reconstruir a superfície da qual se retirou e mediu as amostras a partir da
estimação do modelo de dependência espacial que servirá de base para
interpolar os demais valores que compõem a superfície.
• Áreas com contagens e taxas agregadas: dados originalmente
pontuais, agregados em unidades de análise.
Introdução à análise espacial
Dependência Espacial: Baseia-se na Primeira lei da
Geografia: as distâncias observadas entre as ocorrências de
objetos (ou fenômenos) interferem diretamente na relação
entre eles.
Autocorrelação espacial: Expressão computacional da
Dependência Espacial, mensura o relacionamento entre duas
variáveis aleatórias. A preposição auto indica a medição da
mesma variável aleatória em locais diferentes.
Inferência Estatística para Dados Espaciais: Dados
independentes permitem inferências de melhor qualidade.
Havendo dependência espacial, os dados devem ser tratados
em um mesmo processo estocástico, onde todos os dados
são avaliados em conjunto.
Introdução à análise espacial
Efeito de 1ª ordem: valor esperado (média) do processo no
espaço;
Efeito de 2ª ordem: covariância entre áreas si e sj;
Estacionariedade: em um processo estacionário, os efeitos
de 1ª e 2ª ordem são constantes em toda a região estudada;
Isotropia: um processo isotrópico é um caso particular de
processo estacionário em que a covariância depende
somente da distância (e não da direção) entre os pontos.
Introdução à análise espacial
Modelos Inferenciais Espaciais
Processo Pontual
• Conjunto de pontos distribuídos irregularmente no espaço;
• O objetivo é compreender o mecanismo gerador da
distribuição;
• Divisão da região de estudos, A, em sub-regiões, S, de
acordo com a probabilidade de ocorrência de um fenômeno.
• O processo é modelado considerando as sub-regiões Si com
os valores de esperança E[N(S)] – onde N(S) é o número de
ocorrências em S – e a covariância C[N(Si), N(Sj)].
Introdução à análise espacial
Modelos Inferenciais Espaciais
Variação Contínua
•
Consideram um processo estocástico, de modo que os valores podem
ser conhecidos em todos os pontos da região de estudo;
• Para estimar a superfície pode-se usar o procedimento de krigagem ou a
simulação estocástica.
– A krigagem tem como objetivo compor a superfície empregando
estimativas pontuais ótimas (minimizando funções dos erros inferenciais);
– A simulação estocástica visa reproduzir a variabilidade espacial da
superfície empregando possíveis representações globais do modelo de
função aleatória.
Introdução à análise espacial
Modelos Inferenciais Espaciais
Variação Discreta
• Dizem respeito à distribuição de eventos cuja localização está associada
a áreas delimitadas por polígonos;
• O objetivo é modelar o padrão de ocorrência espacial do fenômeno em
estudo;
• Se o processo é estacionário, o valor esperado para a variável aleatória
é a média dos valores que ocorrem na região e a estrutura de covariância
depende unicamente da distância entre as áreas.
Introdução à análise espacial
Classes de Operações
Sobre atributos alfanuméricos: novos atributos como
resultados de operações
• Lógicas: união, interseção, negação e exclusão;
• Aritiméticas: soma, subtração, multiplicação, divisão exponenciação,
radiciação, logaritmos;
• Trigonométricas: sen, cos, tan, suas inversas, e transformações grausradianos;
• Estatísticas: média, desvio padrão, variância, moda, etc;
• Multivariadas: modelos de regressão multivariada, modelos físicos,
probabilidade de pertinência a um conjunto, função de pertinência fuzzy,
etc.
Introdução à análise espacial
Classes de Operações
Sobre atributos espaciais
• Inclusão: contém ou está contido em;
• Sobreposição: sobrepõe, cruza ou toca;
• Vizinhança: à distância de ‘n’ metros, está ligado a
(fisicamente ou funcionalmente);
• Derivações de superfície: inclinação, é visível a partir de,
direções preferenciais no terreno, etc.;
Análises espaciais
sobre dados matriciais
• Fenômenos representados em grades regulares;
• Aquisição por sensores remotos ou pela interpolação de
pontos distribuídos de forma irregular;
• Algumas informações podem ter sido perdidas de acordo
com o espaçamento da grade;
• Krigagem: conjunto de técnicas de estimação e predição de
superfícies baseada na modelagem da estrutura de
correlação espacial. Parte-se da hipótese de que o processo
estudado é estacionário;
• Modelagem dinâmica: autômatos celulares;
Operações
• Álgebra de Mapas: operações algébricas envolvendo um ou
mais atributos é aplicada a todas as células;
• Operações pontuais: operações algébricas envolvendo um
ou mais atributos é aplicada a apenas uma célula;
• Operações espaciais
– Interpolação: reamostragem em diferentes resoluções;
– Filtragem espacial: suavização e realce de bordas;
– Derivações de superfície: primeira (inclinação e aspecto),
segunda (convexidades plana e de perfil) e terceira (filtros
direcionais) ordens;
– Extração de topologia na superfície: rede de drenagem;
– Avaliação de contiguidade (clumping): amostras com
características semelhantes são agrupadas;
– Propagação não-linear: presença de resistência (friction) na
propagação dos fenômeno em função de distâncias ou direções;
– Visibilidade (viewsheds);
– Sombreamento (shading): técnicas de ray-tracing, reflexão difusa,
aspect-based;
http://www.ceremade.dauphine.fr/~peyre/numericaltour/tours/introduction_3_image/index_07.png
http://www.sciencedirect.com/science/article/pii/S0341816
299000089
http://www.fmwconcepts.com/ima
gemagick/fourier_transforms/imag
es/lena_circle24n_edge.png
Shaded Relief
http://cartography.oregonstate.edu/pdf/2001_Jenny_Reliefshading.pdf
Análises espaciais
sobre dados vetoriais
Processos Pontuais
• O tipo de dado nestes estudos consiste em uma série de
coordenadas de pontos (p1, p2, ...) dos eventos de interesse
dentro da área de estudo.
• A área dos eventos não é uma medida válida apesar de em
muitos casos ocuparem espaço. Mesmo na análise do padrão
de distribuição de cidades estas são consideradas como um
ponto no espaço do estudo.
• O objetivo da análise é determinar se os eventos observados
exibem algum padrão sistemático, em oposição à uma
distribuição aleatória.
Estimador de Intensidade (Kernel Estimation)
Definição de uma função bi-dimensional sobre os eventos considerados,
compondo uma superfície cujo valor será proporcional à intensidade de
amostras por unidade de área. Esta função realiza uma contagem de
todos os pontos dentro de uma região de influência, ponderando-os pela
distância de cada um à localização de interesse.
No caso univariado o estimador kernel para uma amostra aleatória X1, . . . , Xn
retirada de uma distribuição com densidade comum f, pode ser definido como
1 n x Xi
f ( x; h)
K
nh i 1 h
Os parâmetros básicos para o kernel estimator são:
• um raio de influência (τ ≥ 0) que define a vizinhança do ponto a ser
interpolado e controla o alisamento da superfície gerada: O raio de
influência define a área centrada no ponto de estimação u que indica
quantos eventos ui contribuem para a estimativa da função intensidade λ;
• uma função de estimação com propriedades de suavização do
fenômeno. A função kernel K pode ser qualquer função de densidade de
probabilidade (Gaussiana, Triangular, Retangular, etc.) desde que
K (h)dh 1
• É comum usar funções de terceira ou quarta ordem, como
Nestes estimadores, h representa a distância entre a localização em que
desejamos calcular a função e o evento observado.
A distribuição normal pondera os pontos dentro do círculo de forma que os
pontos mais próximos tenham maior peso comparados com os mais
afastados.
A função quártica pondera com maior peso os pontos mais próximos do
que pontos distantes, mas o decrescimento é gradual.
A função triangular dá maior peso aos pontos próximos do que os pontos
distantes dentro do círculo, mas o decréscimo é mais rápido.
A função exponencial negativa pondera os pontos próximos com peso
muito mais intenso do que os pontos distantes.
A função uniforme pondera todos os pontos dentro do círculo igualmente.
Estimadores de Dependência Espacial
Método do Vizinho Mais Próximo
O método do vizinho mais próximo estima a função de distribuição
cumulativa Ĝ(h) baseado nas distâncias h entre eventos em uma região
de análise. Esta função pode ser estimada empiricamente:
# (d (ui , u j ) h)
G ( h)
n
onde o valor normalizado acumulado para uma
distância h corresponde à soma dos vizinhos
mais próximos de cada evento cuja distância é
menor ou igual a h, dividido pelo número de
eventos na região.
Teste de Significância
A distribuição de eventos observados é comparada com distribuições
teóricas ou simulações que representem a Completa Aleatoriedade
Espacial (Complete Spatial Randomness – CSR): processo de Poisson
homogêneo sobre a região estudada.
G ( h) 1 e
h 2
w0
A estimação simulada para a distribuição G’(h) assumindo-se CSR é
calculada como a média das simulações.
Para calcular a condição de aleatoriedade, calculam-se os envelopes de
simulação superior e inferior, respectivamente, valores máximos e
mínimos de Gi(h).
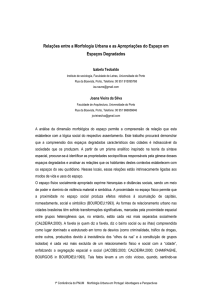
Observando o gráfico Ĝ(h) X G’(h), conclui-se que distribuições são
aleatórias quando se aproximam de uma linha a 45º. Curvaturas acima
dessa linha indicam agrupamentos enquanto curvaturas abaixo dessa
linha indicam regularidade na distribuição espacial.
Função K
Embora o método do vizinho mais próximo forneça uma indicação inicial
da distribuição espacial, ele considera apenas escalas pequenas. O
método da função K é o mais indicado para se ter informação mais efetiva
para o padrão espacial em escalas maiores.
Também denominada medida de momento de segunda ordem reduzido, a
função K é definida, para o processo univariado, como
λK(h) = E(# eventos contidos a uma distância h de um evento arbitrário)
onde
# está associado ao número de eventos,
E() é o operador de estimativa, e
λ é a intensidade ou número médio de eventos por unidade de área,
assumida constante na região.
n
n
R
Kˆ ( h ) 2 I h (d ij )
n i 1 j 1
R é a área da região,
n é o número de eventos observados,
Ih(dij) é uma função indicatriz cujo valor é 1 se (dij) <= h e 0, em caso
contrário.
ˆ (h)
K
Lˆ (h )
h
A função auxiliar L permite fácil interpretação da distribuição espacial dos
pontos:
a) atração espacial entre eventos ou agrupamentos para valores
positivos, sendo o agrupamento mais forte em picos positivos;
b) repulsão espacial ou regularidade em pontos de valores negativos.
Análises espaciais
sobre dados vetoriais
Processos Agrupados por Áreas
• São analisados eventos agregados por municípios, bairros ou setores
censitários, onde não se dispõe da localização exata dos eventos, mas
de um valor por área;
• São indicadores úteis: contagens, proporções, médias e medianas;
• Limita-se o uso de dados agrupados em SIG a operações de
visualização, tirando conclusões intuitivas a partir das colorações
atribuídas a cada polígono (mapas temáticos);
• A hipótese mais comum é supor que área apresente uma distribuição de
probabilidade distinta das demais, o chamado modelo espacial discreto.
• O objetivo principal da análise é construir uma aproximação para a
distribuição conjunta de variáveis aleatórias, estimando sua
distribuição.
Análises espaciais
sobre dados vetoriais
Análise exploratória: Visualização de Dados
O uso de diferentes pontos de corte da variável induz a visualização de
diferentes aspectos. Os SIGs dispõem usualmente de três métodos de
corte de variável: intervalos iguais, percentis e desvios padrões.
• Adotando intervalos iguais, os valores máximo e mínimo são divididos
pelo número de classes;
• O uso de percentis para definição de classes obriga a alocação dos
polígonos em quantidades iguais pelas cores; isto pode mascarar
diferenças significativas em valores extremos e dificultar a identificação de
áreas críticas.
• O uso de desvios padrões supõe que a distribuição da variável é
apresentada em gradações de cores diferentes para valores acima e
abaixo da média, faz a suposição da normalidade da distribuição da
variável;
Análises espaciais
sobre dados vetoriais
Análise exploratória: Matrizes de Proximidade Espacial
• também chamada matriz de vizinhança
•Esta medida de proximidade pode ser calculada a partir de um dos
seguintes critérios:
– wij = 1, se o centróide de Ai está a uma determinada distância de Aj; caso
contrário wij = 0;
– wij = 1, se Ai compartilha um lado comum com Aj, caso contrário wij = 0;
– wij = lij/li, onde lij é o comprimento da fronteira entre Ai e Aj e li é o perímetro
de Ai.
• Recomenda-se normalizar suas linhas, para que a soma dos pesos de
cada linha seja igual a 1.
Análises espaciais
sobre dados vetoriais
Análise exploratória: Média Móvel Espacial
• A fim de explorar a variação da tendência espacial dos dados, calcula-se
a média dos valores dos vizinhos. Isto reduz a variabilidade espacial,
pois a operação tende a produzir uma superfície com menor flutuação que
os dados originais (explicita as tendências).
•A média móvel associada ao atributo zi, relativo à i-ésima área, pode ser
calculada a partir dos elementos wij da matriz normalizada de proximidade
espacial W(1), tomando-se simplesmente a média dos vizinhos:
Análises espaciais
sobre dados vetoriais
Análise exploratória: Indicadores Globais de Autocorrelação
Espacial
• A Auto-correlação espacial é a correlação de uma certa variável
(atributo) z numa área i com os valores dessa mesma variável em áreas
vizinhas.
• Dada uma matriz de vizinhança normalizada, o índice global de Moran I
é a expressão da autocorrelação considerando apenas o primeiro vizinho:
O índice de Moran nulo indica independência espacial, enquanto valores
positivos indicam correlação direta e negativos, correlação inversa.
Análises espaciais
sobre dados vetoriais
Análise exploratória: Indicadores Globais de Autocorrelação
Espacial
• A hipótese implícita do cálculo do índice de Moran é a estacionariedade
de primeira e segunda ordem, e o índice perde sua validade ao ser
calculado para dados não estacionários (pois cada valor é comparado à
média global);
• O teste C de Geary difere do teste I de Moran por utilizar a diferença
entre os pares, enquanto que Moran utiliza a diferença entre cada ponto e
a média global.
Análises espaciais
sobre dados vetoriais
Análise exploratória: Variograma
• Consiste na demonstração gráfica da relação entre as distâncias entre
as áreas em estudo, no eixo X, e a média dos desvios do atributo Z entre
as áreas (dz), no eixo Y;
• A dependência espacial se evidencia quando maiores desvios são
obtidos entre áreas mais afastadas;
• Semelhança com teste de Geary;
Análises espaciais
sobre dados vetoriais
Análise exploratória: Correlograma
• Consiste na demonstração gráfica da relação entre as distâncias
utilizadas para a vizinhança e o respectivo coeficiente de auto-correlação
espacial para cada distância;
• A dependência espacial se evidencia quando maiores correlações são
obtidos entre áreas mais próximas e diminuem com a distância;
• Semelhança com teste de Moran;
Análises espaciais
sobre dados vetoriais
Análise exploratória: Diagrama de Espalhamento de Moran
• Construído com base nos valores normalizados (valores de atributos
subtraídos de sua média e divididos pelo desvio padrão);
• É construindo um gráfico bidimensional de z (valores normalizados do
atributo em uma área) por wz (média dos vizinhos, também normalizada);
• Os quadrantes podem ser interpretados como:
– Q1 (valores positivos, médias positivas) e Q2 (valores negativos, médias
negativas): indicam pontos de associação espacial positiva, no sentido que
uma localização possui vizinhos com valores semelhantes.
– Q3 (valores positivos, médias negativas) e Q4 (valores negativos, médias
positivas): indicam pontos de associação espacial negativa, no sentido que
uma localização possui vizinhos com valores distintos.
O diagrama de espalhamento de Moran também pode ser apresentado na
forma de um mapa temático bidimensional, no qual cada polígono é
apresentado indicando-se seu quadrante no diagrama de espalhamento:
“Alto-Alto”, “Baixo-Baixo”, “Alto-Baixo” e “Baixo-Alto” indicando,
respectivamente, os quadrantes Q1, Q2, Q3 e Q4.